
搬送装置
【課題】複雑な構成を採用することなく、高速運転を行うことができる搬送装置を提供する。
【解決手段】搬送装置は、互いの間に間隔をあけ並設された4本のビーム21〜24と、これらのビーム21〜24をX軸方向左へ前進させ、X軸方向右側へ後退させる駆動源とを有する。ビーム21〜24は、それぞれが径方向外側に向けて突出した部分を備える。ビーム22,23がX軸方向左側へ前進する際には、突出した部分の先端が対象ワーク500に当接して、この当接部分を以って推進力を対象ワーク500に伝達して、これを搬送する。そして、搬送装置では、後退中のビーム21,24は、突出した部分が対象ワーク500から離脱するように、その軸周りに回転した姿勢をとっている。これにより、後退中のビーム21,24は、対象ワーク500に接触しない。
【解決手段】搬送装置は、互いの間に間隔をあけ並設された4本のビーム21〜24と、これらのビーム21〜24をX軸方向左へ前進させ、X軸方向右側へ後退させる駆動源とを有する。ビーム21〜24は、それぞれが径方向外側に向けて突出した部分を備える。ビーム22,23がX軸方向左側へ前進する際には、突出した部分の先端が対象ワーク500に当接して、この当接部分を以って推進力を対象ワーク500に伝達して、これを搬送する。そして、搬送装置では、後退中のビーム21,24は、突出した部分が対象ワーク500から離脱するように、その軸周りに回転した姿勢をとっている。これにより、後退中のビーム21,24は、対象ワーク500に接触しない。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、搬送装置に関し、特に、ウォーキングビーム型の搬送装置の構造に関する。
【背景技術】
【0002】
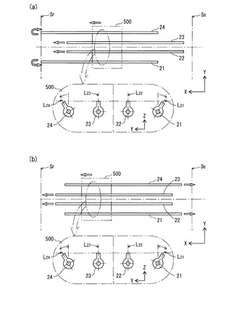
所謂、ウォーキングビーム型の搬送装置は、大型ワークの搬送などに広く用いられている。ウォーキングビーム型の搬送装置は、互いに並設された複数のビームを備え、当該複数のビームに対し往復運動を実行させる。そして、ビームの前進の際の推進力を以ってワークを搬送するものである(例えば、特許文献1,2,3を参照)。従来技術に係るウォーキングビーム型搬送装置の駆動原理について、図10および図11を用い説明する。
【0003】
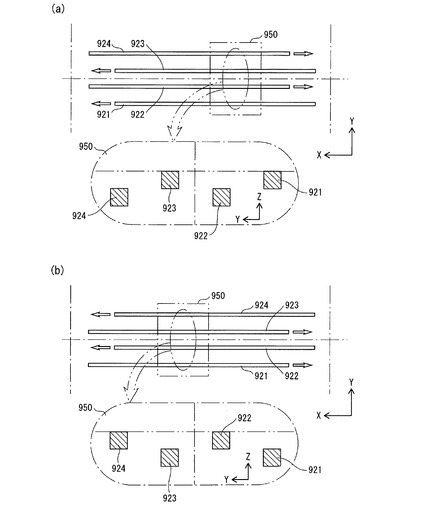
図10(a)、(b)に示すように、ウォーキングビーム型の搬送装置では、4本のビーム921〜924を備える。4本のビーム921〜924は、互いの軸芯同士が平行となるように並設されている。そして、4本のビーム921〜924は、それぞれX軸方向に前進−後退することができるように駆動源(図示を省略)に連結されている。
図10(a)に示すように、4本のビーム921〜924は、ビーム921,923が対となってX軸方向に往復運動する。同様に、ビーム922,924は、対となってX軸方向に往復運動する。ここで、図10(a)に示すように、ビーム921,923がX軸方向左側へと前進するとき、ビーム922,924が、X軸方向右側へと後退する。そして、二点鎖線で囲んだ部分に示すように、図10(a)の状態では、前進するビーム921,923が、その上端面においてワーク950に接しており、後退するビーム922,924がワーク950から離れた状態にある。
【0004】
ワーク950は、前進するビーム921,923の推進力によりX軸方向左側へと前進する。
次に、図10(b)に示すように、ビーム921,923が前進限まで達し、ビーム922,924が後退限まで達すると、ビーム921,923がX軸方向右側へと後退を開始し、ビーム922,924がX軸方向左側へと前進を開始する。なお、図10(b)の二点鎖線で囲んだ部分に示すように、後退するビーム921,923はワーク950からZ軸方向に離れ、代わって、前進するビーム922,924の上端面がワーク950に接する。
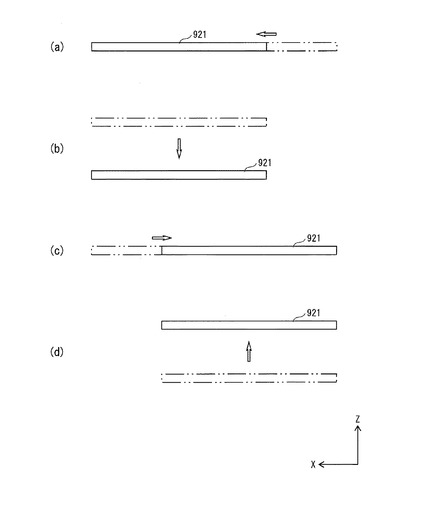
【0005】
図11(a)に示すように、ビーム921は、X軸方向に前進する。このとき、ビーム921の上端面にはワーク950(図10を参照)が載置されており、ワーク950は、ビーム921とともに前進する。
図11(b)に示すように、ビーム921は、前進限に達すると、ワーク950からZ軸方向下側に向けて離れる。そして、図11(c)に示すように、ビーム921は、ワーク950から離れた状態を維持しながら、X軸方向右側へと後退する。
【0006】
図11(d)に示すように、ビーム921は、後退限に達すると、ワーク950に接触するまでZ軸方向上側に向けて上昇する。
なお、図10に示すように、ビーム923は、ビーム921と同期して動き、ビーム922,924は、ビーム921とは逆の動きをする。
以上のようにして、ウォーキングビーム型の搬送装置では、ワーク950を搬送する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許2522901号公報
【特許文献2】特開平09−268313号公報
【特許文献3】特開2007−176698号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記従来技術に係るウォーキングビーム型の搬送装置では、前進限および後退限においてビーム921〜924を上下動させるための時間を確保しておく必要があり、更なる高速運転を行うことが困難である。
本発明は、上記問題の解決を図るべくなされたものであって、複雑な構成を採用することなく、高速運転を行うことができる搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明に係る搬送装置は、次の構成を採用する。
本発明に係る搬送装置は、互いの間に間隔をあけ並設された第1および第2のビームと、 第1および第2のビームをその軸芯方向に前進および後退させる駆動源とを有し、第1および第2のビームの前進時における推進力を以って対象ワークを搬送する装置である。そして、本発明に係る搬送装置では、駆動源は第1および第2のビームに対し、前進および後退を1サイクルとし、且つ、第1のビームと第2のビームとで位相のずれを有する状態に駆動力を与える。また、本発明に係る搬送装置では、第1および第2のビームのそれぞれが、その軸芯に交差する断面において、外周の一部が径方向外側に向けて突出した突出部を有した形状となっている。
【0010】
本発明に係る搬送装置において、第1および第2のビームの各々は、各軸芯を中心に回転自在になっており、前進時において、突出部の先端が対象ワークに当接するように前記軸芯周りの回転角が制御され、後退時において、突出部の先端が対象ワークから離脱するように前記軸芯周りの回転角が制御されている、ことを特徴とする。
【発明の効果】
【0011】
上記のように、本発明に係る搬送装置では、第1および第2のビームのそれぞれが、突出部が対象ワークから離れるように回転角(前記軸芯を中心とする回転角)が制御された状態で後退する。このため、上記従来技術に係る搬送装置のように、ビームの前進から後退への切り替えに際して上下動を伴う場合に比べて、第1および第2のビームのストロークを小さくすることができ、高速駆動が可能である。
【0012】
また、本発明に係る搬送装置では、第1および第2のビームの各後退時に、軸芯周りに回転させるだけで対象ワークから離脱させることができ、複雑な構造を採用する必要がない。
本発明に係る搬送装置では、突出部が対象ワークに当接する状態で前進するビームにより、その推進力が対象ワークに伝達され、これを搬送することができる。
【0013】
従って、本発明に係る搬送装置では、複雑な構成を採用することなく、高速運転を行うことができる。
上記本発明に係る搬送装置では、次のようなバリエーションを採用することができる。
上記本発明に係る搬送装置では、第1および第2のビームの各々が、軸芯に交差する断面における姿勢が正立状態となることにより突出部の先端が対象ワークに当接し、軸芯に交差する断面における姿勢が傾倒状態となることにより突出部の先端が対象ワークから離脱する、という構成を具体的に採用することができる。
【0014】
また、上記本発明に係る搬送装置では、突出部の先端が、各ビームの軸芯を中心とする同心円を以って構成された曲面となっている、という構成を採用することができる。このような構成を採用すれば、前進から後退への切り替えに際して、ビームの回転時に対象ワークに不要な力が加わることを防止でき、搬送中の対象ワークが位置ズレを起すことがない。
【0015】
また、上記本発明に係る搬送装置では、駆動源が次の第1から第3の状態を順に実行するように、第1および第2のビームに対して駆動力を伝達する、という構成を採用することができる。
(第1の状態)第1のビームが前進し、且つ、第2のビームが後退する状態。
(第2の状態)第1および第2のビームの双方が、互いに同期した状態で前進する状態。
【0016】
(第3の状態)第2のビームが前進し、且つ、第1のビームが後退する状態。
また、上記本発明に係る搬送装置では、第1のビームと同一の形状を有し、且つ、第1のビームと同期した状態で前進および後退する第3のビームと、第2のビームと同一の形状を有し、且つ、第2のビームと同期した状態で前進および後退する第4のビームとをさらに有する構成を採用することができる。そして、この場合において、第3のビームは、対象ワークの搬送中心線として、第1のビームに対して線対象の関係を以って配置され、且つ、正立か傾倒かの姿勢が制御されており、第4のビームは、対象ワークの搬送中心線として、第2のビームに対して線対象の関係を以って配置され、且つ、正立か傾倒かの姿勢が制御されている、という構成を採用することができる。このような構成を採用する場合においては、搬送中心線に対して線対象の関係を以って複数のビームが配され、また駆動するので、駆動時における対象ワークの位置ズレや進行方向に対する回転などを生じることがない。
【0017】
なお、上記のように、第3および第4のビームを併設する場合においては、第3および第4のビームが、第1および第2のビームに対し、タイミングベルトで連結されることにより同期が図られている、という構成を採用することができる。このような構成を採用すれば、搬送中における対象ワークの姿勢を傾きなく保つことができる。
また、上記本発明に係る搬送装置では、駆動源が、一つのモータと、当該モータから延出された回転軸に取り付けられた複数のカムとを有し、複数のカムの中に、表面に溝が掘られた円筒状の円筒カムと、表面に溝が掘られた板状の溝カムとが含まれているという構成を採用することができる。そして、この場合において、第1および第2のビームの前進および後退は、円筒カムを介してなされ、第1および第2のビームの各姿勢の制御は、溝カムを介してなされている、という構成を採用することができる。このような構成を採用する場合には、一つのモータで第1および第2のビームを同期駆動させることができ、高い精度での搬送動作を実現することができる。
【0018】
なお、上記のように、第3および第4のビームを追加する場合においては、上記モータから延出された回転軸にプーリを取り付け、これにタイミングベルトを用いることで、第3および第4のビームについても、モータの数を増加させることなく、それぞれ同期運転させることができる。
【図面の簡単な説明】
【0019】
【図1】実施の形態に係る搬送装置1の外観を示す模式斜視図である。
【図2】ビーム21の駆動に係る構成を示す模式側面図である。
【図3】円筒カム41の構成を示す模式正面図である。
【図4】溝カム42の構成を示す模式正面図である。
【図5】ビーム21の正立−傾倒動作を示す模式正面図である。
【図6】搬送装置1におけるビーム21〜24の動作を示す模式上面図である。
【図7】搬送装置1におけるビーム21〜24の動作を示す模式上面図である。
【図8】搬送装置1におけるビーム21〜24の動作を示す模式上面図である。
【図9】搬送装置1における搬送動作に係るタイミングチャートである。
【図10】従来技術に係る搬送装置での搬送動作を示す模式上面図である。
【図11】ビーム921の動作を示す模式側面図である。
【発明を実施するための形態】
【0020】
以下では、本発明を実施するための最良の形態について、図面を参酌しながら説明する。なお、以下の説明に係る実施の形態は、本発明の構成上の特徴および当該特徴的構成から奏される作用効果を分かりやすく説明するための一例として用いるものであって、本発明は、その本質的な特徴部分を除き、以下の内容に何ら限定を受けるものではない。
[実施の形態]
1.概略構成
実施の形態に係る搬送装置1の概略構成について、図1を用い説明する。
【0021】
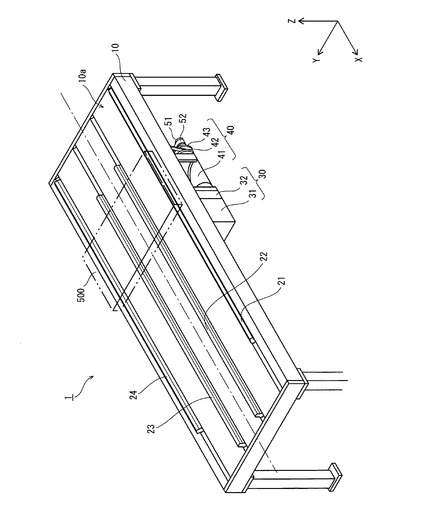
図1に示すように、本実施の形態に係る搬送装置1は、ウォーキングビーム型の装置であって、テーブル状のメインフレーム10をベースに構成されている。メインフレーム10におけるZ軸方向上側の主面部10aには、X軸方向に延びる4本のビーム21〜24が並設されている。
4本のビーム21〜24は、互いの間に間隔をあけ、それぞれがX軸方向前後に往復駆動自在になっている。4本のビーム21〜24に対しては、一つの駆動部30が設けられている。駆動部30は、モータ31と、その回転軸に取り付けられたギア32との組み合わせを以って構成されている。そして、駆動部30は、メインフレーム10における主面部10aのZ軸方向下側に収納されている。
【0022】
4本のビーム21〜24の内、ビーム21とビーム22とが対をなし、ビーム23とビーム24とが対をなしている。そして、ビーム21とビーム24とは、主面部10aの搬送中心線(Y軸方向に中央をX軸方向に延びる中心線)を基準に、線対称の関係を以って配置されている。同様に、ビーム22とビーム23とも、線対称の関係を以って配置されている。
【0023】
駆動部30から延出された回転軸には、カム機構部40とプーリ51が連結されている。カム機構部40には、外周面に溝が形成された円筒カム41と、円板状をし、その一方の主面に溝が形成された溝カム42とを含んで構成されている。また、プーリ51には、タイミングベルト52が取り付けられている。
なお、搬送装置1においては、カム機構部40が、Y軸方向手前側の2本のビーム21,22に対して設けられている。Y軸方向奥側の2本のビーム23,24に対しては、図示を省略するカム機構部が設けられている。ビーム23,24に対して設けられたカム機構部は、ビーム21,22に対して設けられたカム機構部40と同一構成を有する。タイミングベルト52は、カム機構部40と、ビーム23,24に対して設けられたカム機構部とを連結するものであって、ビーム21,22とビーム23,24とを同期駆動させるのに供されている。
【0024】
搬送装置1では、ビーム21〜24がX軸方向に前進する際に、その推進力を以ってワーク500が搬送される。
2.ビーム21〜24の前後動に係る機構
ビーム21〜24の前後動に係る機構について、図2および図3を用い説明する。なお、図2では、ビーム21の前後動に係る機構のみを示している。
【0025】
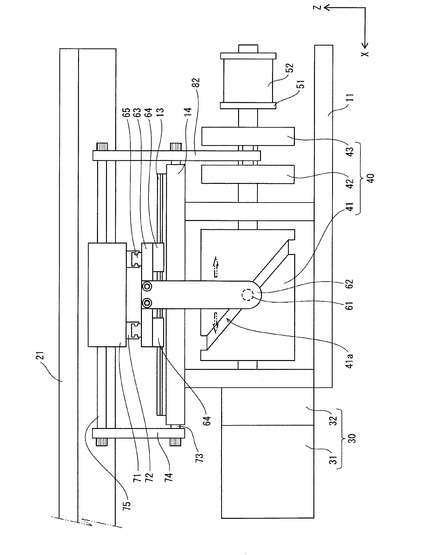
図2に示すように、駆動部30は、ベース11に固定されており、その回転軸がX軸方向の右側に向けて延出されている。回転軸には、円筒カム41と2つの溝カム42,43からなるカム機構部40が取り付けられており、回転軸の回転に連動して回転する。
円筒カム41の外周面には、ループをなす一条の溝41aが形成されており、当該溝41aには、前後動アーム62に回転自在に取り付けられたカムローラ61が入り込んだ状態となっている。前後動アーム62は、Z軸方向に沿って配されており、円筒カム41の回転に伴って、X軸方向左右方向に移動する。なお、前後動アーム62は、前後動に際し、平行移動する。
【0026】
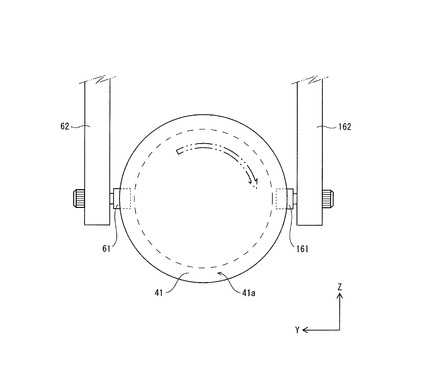
図3に示すように、円筒カム41に形成された溝41aに対して、前後動アーム62のカムローラ61の他、Y軸方向における反対側に前後動アーム162のカムローラ161が入り込んだ状態となっている。なお、前後動アーム162は、ビーム22に対応するものである。
図2に戻って、前後動アーム62には、そのZ軸方向上端部分にサブベース63が取り付けられている。サブベース63には、そのZ軸方向下側にガイドブロック64が取り付けられており、ベース11に連結されたサブベース14上に敷設されたガイドレール13に取り付けられている。このため、サブベース63は、前後動アーム62の前後動に伴って、X軸方向の左右に移動する。
【0027】
図2では、図示を省略しているが、ビーム21は、サブベース63の動きに同期した状態でX軸方向左右に移動する。
図2では、ビーム21についてのX軸方向の前後動(前進−後退)に係る機構を示しているが、他のビーム22〜24についても、同様の機構を以ってX軸方向の前後動を行う。
【0028】
3.ビーム21〜24の軸芯周りの回転に係る機構
本実施の形態に係る搬送装置1では、各ビーム21〜24がそれぞれの軸芯周りに回転自在に構成されている。当該機構について、図2、図4および図5を用い説明する。なお、図2、図4および図5では、ビーム21の回転に係る機構のみを示しているが、他のビーム22〜24についても、同様の回転に係る機構が取り付けられている。
【0029】
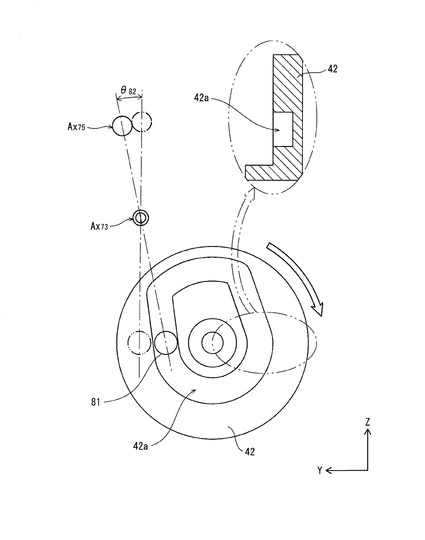
図2に示すように、溝カム42,43には、搖動アーム82が連結されている。当該溝カム42は、図4に示すように、円板状の外観形状を有しており、その一方の主面(図面手前側の主面)にループ状の溝42aが設けられている。そして、搖動アーム82におけるカムローラ81が回転自在で溝42a内に収められている。
図4に示すように、搖動アーム82は、カムローラ81が溝カム42の溝42a内を移動するのに対応して、Y軸方向の左右に移動する。搖動アーム82は、軸Ax73を支点に搖動し、Z軸方向上側の端点Ax75が角度θ82だけ搖動する。なお、溝カム43に連結されている搖動アームについても、同様の動きをする。
【0030】
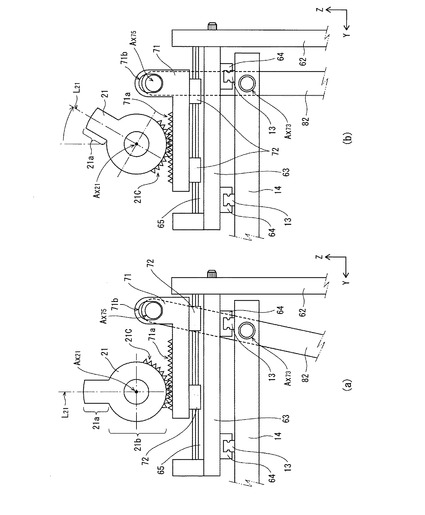
図2に戻って、搖動アーム82は、サブベース14に軸支された支軸73に支持されている。支軸73の軸芯は、軸Ax73である(図4を参照)。そして、搖動アーム82のZ軸方向先端部分には、搖動シャフト75が取り付けられており、当該搖動シャフト75の軸芯が、端点Ax75である(図4を参照)。搖動シャフト75は、搖動ブロック71に設けられた孔を挿通している。
【0031】
ここで、搖動ブロック71は、そのZ軸方向下側にガイドブロック72が取り付けられており、ガイドブロック72は、サブベース63上に敷設されたガイドレール65に取り付けられている。このため、搖動ブロック71は、前後動アーム62の前後動に伴い、X軸方向に前後動し、搖動アーム82の搖動に伴い、紙面垂直方向に搖動する。
なお、支軸73と搖動シャフト75との間には、サブアーム74も取り付けられており、搖動シャフト82に伴い、搖動する。
【0032】
図5(a)に示すように、搖動ブロック71には、Z軸方向上側の面にギア71aが形成されている。また、上記のように、搖動シャフト75を挿通するための孔71bが設けられている。孔71bは、Z軸方向長さがY軸方向幅に比べて長い長円形となっている。搖動アーム82が、軸Ax73を支点として搖動するとき、端点Ax75が作用点となって、搖動ブロック71がY軸方向左右に移動する。
【0033】
ビーム21は、その軸芯Ax21を通る中心線L21の方向に突出した突出部21aを有し、他の部分(ベース部分)21bは、円形断面を有している。ここで、上記のように、ビーム21は、軸芯Ax21を中心として回転自在となっている。そして、ビーム21は、その断面におけるベース部分の外周に、搖動ブロック71のギア71aと噛合するギア21cが形成されている。
【0034】
図5(a)に示すように、搖動アーム82がZ軸に対して角度を有した状態にあるときには、搖動ブロック71はY軸方向右側に位置し、この状態においては、ビーム21は、その中心線L21がZ軸に沿って正立した状態となっている。
一方、図5(b)に示すように、搖動アーム82がZ軸に沿う状態に起立した状態まで搖動したときには、搖動ブロック71はY軸方向左側へと移動し、ギア71aとギア21cとにより、ビーム21を左向きに傾倒させる。即ち、この状態において、ビーム21の中心線L21は、右向きに傾斜し、それに伴い突出部21aも傾斜することになる。
【0035】
なお、突出部21aの頂面は、軸芯Ax21を中心とする曲面となっている。そして、図5(b)のようにビーム21が傾倒した状態では、図5(a)のように正立した状態にある場合よりも、突出部21aの頂面は、Z軸方向において低い状態となる。
なお、図5(a)、(b)では、図示を省略したが、搖動アーム71の孔71bと搖動シャフト75(中心が端点Ax75)の外周面との間には、磨滅防止のベアリングあるいはスリーブが介挿されている。これにより、搖動ブロック71は、前後動アーム62に連動して、紙面垂直方向に前進あるいは後退する。
【0036】
4.ビーム21〜24の前後動によるワーク500の搬送
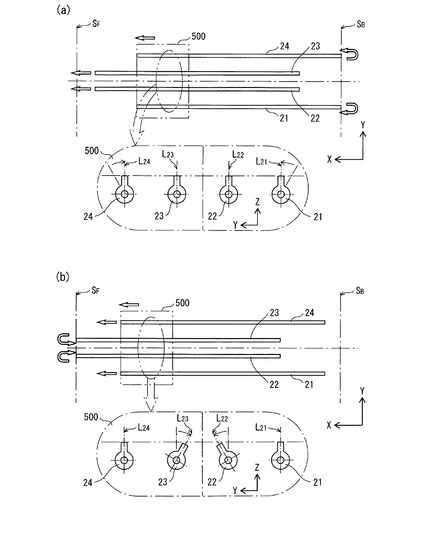
ビーム21〜24の前後動によるワーク500の搬送動作について、図6〜図8を用い説明する。図6〜図8では、ビーム21〜24を図1のZ軸上方から平面視し、また、X軸方向左側から正面視した状態を二点鎖線で囲む部分に示す。
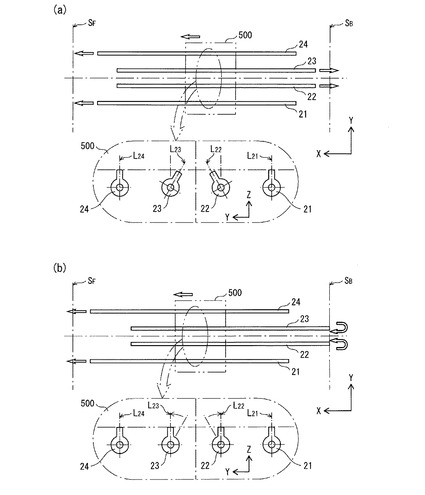
図6(a)に示すように、4本のビーム21〜24の内、Y軸方向の両脇に配置された2本のビーム21,24が同期状態でX軸方向左側へと前進する。このとき、Y軸方向の内側に配置された2本のビーム22,23は、X軸方向右側へと後退する。
【0037】
図6(a)の二点鎖線で囲んだ部分に示すように、紙面手前側に前進するビーム21,24では、その中心軸L21,L24がZ軸に沿って正立している。この状態においては、ビーム21,24の突出部の頂面が、ワーク500に当接しており、ワーク500を搬送する。
一方、紙面奥側に後退するビーム22,23では、その中心軸L22,L23がZ軸に対して傾斜した状態に傾倒した状態となっている。このとき、内側の2本のビーム22,23は、上記傾倒状態に姿勢が制御されているので、突出部の頂面がワーク500から離脱した状態にあり、ワーク500に影響を与えることなく後退する。
【0038】
ここで、ビーム22とビーム23とは、搬送中心に対して線対称の関係を以って傾倒された状態となっている。
後退するビーム22,23は、後退限SBに到達する手前からX軸方向の速度を落とし、また、その姿勢を傾倒状態から正立状態に向けて変化し始める。なお、ビーム22,23の姿勢は、後退限SBに到達の時点では、未だ正立状態とはなっていない。
【0039】
次に、図6(b)に示すように、ビーム22,23が後退限SBに到達した後、両ビーム22,23はX軸方向左側へとその進行方向を反転し、速度を上昇させながら前進を始める。搬送装置1では、ビーム22,23が後退限SBに到達した時点においても、両脇のビーム21,24は、未だ前進限SFには到達しておらず、前進を続ける。
図6(b)の二点鎖線で囲む部分に示すように、ビーム22,23が、前進を続けるビーム21,24と等速状態になった場合において、その姿勢が正立状態となる。この姿勢変化の完了により、ビーム21,24とビーム22,23とが、各々の突出部の頂面をワーク500に当接させた状態を以って同期状態で前進する。即ち、ビーム22,23が後退限SBに到達した後、ビーム21,24と等速の状態となった時点から、同期状態の4本のビーム21〜24によりワーク500が搬送される。
【0040】
次に、ビーム21,24は、前進限SFに到達する少し手前から、姿勢を正立状態から傾倒状態へと変化させ始めるとともに、減速し始める。この状態においては、ビーム21,24の突出部の頂面は、ワーク500から離間している。
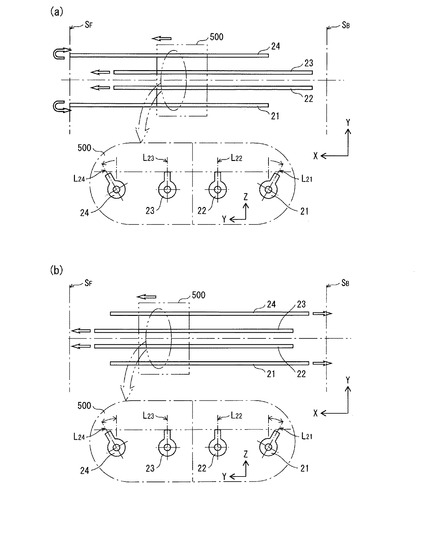
図7(a)に示すように、両脇のビーム21,24が前進限SFに到達すると、両ビーム21,24は、X軸方向右側へとその進行方向を反転し、後退を始める。図7(a)の二点鎖線で囲んだ部分に示すように、ビーム21,24は、前進限SFに到達した時点、あるいは、後退を開始し始めた時点において、その姿勢を完全に傾倒状態と変化させ終わる。このとき、上記同様、ビーム21,24の姿勢は、搬送中心に対して線対称の関係を以って変化する。
【0041】
なお、図7(a)の状態では、前進を続けるビーム22,23が、その突出部の頂面でワーク500に当接した状態にあり、その推進力により搬送が持続されている。
図7(b)に示すように、前進状態から後退状態へと反転したビーム21,24は、後退限SBに向けて後退を続け、図7(b)の二点鎖線で囲んだ部分に示すように、ビーム21,24は、突出部の頂面がワーク500から離間した状態を維持して、後退中にワーク500に影響(例えば、ワーク500の搬送姿勢を乱すような影響)を与えないようになっている。
【0042】
後退中のビーム21,24は、後退限SBに到達する少し手前から、その姿勢を正立状態に向けて変化し始める。ただし、ビーム21,24の姿勢は、後退限SBに到達の時点では未だ正立状態にはなっていない。
次に、図8(a)に示すように、両脇のビーム21,24が後退限SBまで到達した後、加速しながら前進を始める。そして、前進を続けるビーム22,23と等速になった時点で、姿勢が正立状態へと変化し終わる。図8(a)の二点鎖線で囲む部分に示すように、4本のビーム21〜24が全て正立状態となり、且つ、同期した状態で前進をすることになる。この状態において、4本のビーム21〜24の突出部の頂面は、ワーク500に当接しており、これらの推進力を以ってワーク500が搬送される。
【0043】
ビーム22,23は、前進限SFに到達する少し手前から、その姿勢を傾倒状態へと変化させ始め、且つ、減速し始める。
図8(b)に示すように、ビーム22,23は、前進限SFに到達した時点で、進行方向をX軸方向右側へと反転させ、後退を始める。このとき、図8(b)の二点鎖線で囲んだ部分に示すように、ビーム22,23は、姿勢を正立状態から傾倒状態への変化を継続する。
【0044】
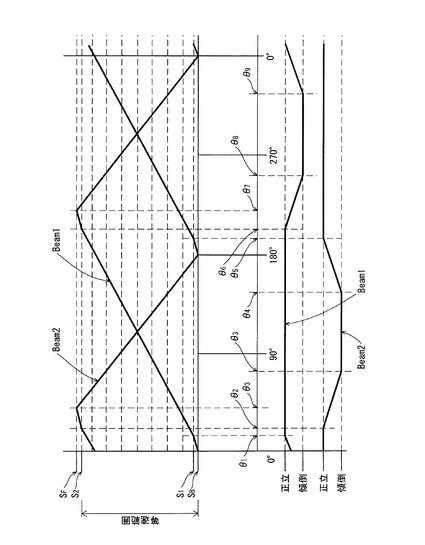
この後、搬送動作が終了するまで、図6(a)から図8(b)の動作を繰り返す。
ビーム21〜24の前後動について、そのタイミングチャートを図9に示す。図9において、“Beam1”がビーム21,24であり、“Beam2”がビーム22,23である。
図9に示すように、Beam1,2の前後動においては、S1〜S2の区間が等速範囲に設定されている。Beam1,2は、等速範囲において、前進する際には、正立状態となっており、ワーク500は、等速移動するBeam1,2により搬送される。図9に示すように、Beam1およびBeam2の各々は、前進と後退とを1サイクルとし、且つ、Beam1とBeam2とは、その前進・後退に係るサイクルの位相にズレを有している。
【0045】
また、上記のように、本実施の形態に係る搬送装置1では、Beam1とBeam2とがともに前進する期間、即ち、ビーム21〜24が前進する期間が設けられており、このときには、全てのビーム21〜24が正立状態となっている。また、当該ビーム21〜24が前進する期間では、全てのビーム21〜24(Beam1,2)の前進が等速範囲で実行される(タイミングθ1〜タイミングθ2の間、タイミングθ5〜タイミングθ6の間)。
【0046】
また、図9に示すように、搬送装置1では、ビーム21〜24が前進限SFまたは後退限SBに到達した後、各々の姿勢が正立状態から傾倒状態へと完全に変化し終わるのを待って反転移動するのではなく、姿勢が傾倒状態へと完全に変化し終わるのは、反転して前進または後退している途中の段階である(タイミングθ3、θ8)。同様に、ビーム21〜24が前進限SFまたは後退限SBに到達した際に、各々の姿勢が傾倒状態から正立状態へと変化するのであるが、これらの姿勢変化は、ビーム21〜24が前進限SFまたは後退限SBに到達した時点から変化し始めるのではなく、前進限SFまたは後退限SBに到達する前の段階から姿勢変化が開始される(タイミングθ4、θ9)。
【0047】
なお、図9にも示すように、搬送装置1では、Beam1,2が前進限SFまたは後退限SBに到達する直前、あるいは到達して反転した直後の期間(タイミングθ2〜タイミングθ3の間、タイミング180[°]〜タイミングθ5の期間、タイミングθ6〜タイミングθ7の期間)においては、等速範囲に比べて低い速度でBeam1,2が前後動する。これにより、ワーク500の搬送に対するBeam1とBeam2との切替時の衝撃が緩和される。
【0048】
[その他の事項]
上記実施の形態に係る搬送装置1では、4本のビーム21〜24を備える構成としたが、ビームの数はこれに限定されない。少なくとも2本以上のビームを備えれば同様の搬送動作を実行することが可能である。
また、上記実施の形態に係る搬送装置1では、ビーム21とビーム24が対をなして同期移動し、ビーム22とビーム23が対をなして同期移動する構成を一例として採用した。しかし、本発明は、3組あるいはそれ以上のビーム対を備え、対の数で1サイクルを分割した駆動動作を行うこともできる。例えば、3組のビーム対を備える構成を採用する場合には、カム角において、120[°]毎に各ビーム対の動作を規定することができる。
【0049】
また、上記実施の形態に係る搬送装置1では、一つのモータ31により4本のビーム21〜24を駆動する構成としたが、2つ以上のモータを採用することもできる。ただし、相互に同期をとる必要がある。
また、ビーム21〜24の形状については、図5(a)、(b)に示すような断面形状に限定されるものではない。一部が径方向に突出した部分を有する断面形状であれば採用することができる。ただし、ワーク500に対して当接および離間する頂面の形状については、当接する際、あるいは離間する際のワーク500への衝撃を小さく抑えるという観点から、姿勢変化に係る軸芯を中心とする円弧であることが望ましい。
【0050】
さらに、上記実施の形態に係る搬送装置1に対して、ワーク500が搬入されてきた際の状態を考慮するとき、前工程からの乗移りをスムーズにするために、補助となるガイドなどを取り付けておくことが望ましい。例えば、特開平09−268313号公報に開示された技術を応用することもできる。
【産業上の利用可能性】
【0051】
本発明は、ワークの高速搬送が可能な搬送装置を実現するのに有用である。
【符号の説明】
【0052】
1.搬送装置
10.メインフレーム
11.ベース
13,65.ガイドレール
14,63.サブベース
21〜24.ビーム
30.駆動部
31.モータ
32.ギア
40.カム機構部
41.円筒カム
42,43.溝カム
51.プーリ
52.タイミングベルト
61,161,81.カムローラ
62,162.前後動アーム
64,72.ガイドブロック
71.搖動ブロック
73.支軸
74.サブアーム
75.搖動シャフト
82.搖動アーム
500.ワーク
【技術分野】
【0001】
本発明は、搬送装置に関し、特に、ウォーキングビーム型の搬送装置の構造に関する。
【背景技術】
【0002】
所謂、ウォーキングビーム型の搬送装置は、大型ワークの搬送などに広く用いられている。ウォーキングビーム型の搬送装置は、互いに並設された複数のビームを備え、当該複数のビームに対し往復運動を実行させる。そして、ビームの前進の際の推進力を以ってワークを搬送するものである(例えば、特許文献1,2,3を参照)。従来技術に係るウォーキングビーム型搬送装置の駆動原理について、図10および図11を用い説明する。
【0003】
図10(a)、(b)に示すように、ウォーキングビーム型の搬送装置では、4本のビーム921〜924を備える。4本のビーム921〜924は、互いの軸芯同士が平行となるように並設されている。そして、4本のビーム921〜924は、それぞれX軸方向に前進−後退することができるように駆動源(図示を省略)に連結されている。
図10(a)に示すように、4本のビーム921〜924は、ビーム921,923が対となってX軸方向に往復運動する。同様に、ビーム922,924は、対となってX軸方向に往復運動する。ここで、図10(a)に示すように、ビーム921,923がX軸方向左側へと前進するとき、ビーム922,924が、X軸方向右側へと後退する。そして、二点鎖線で囲んだ部分に示すように、図10(a)の状態では、前進するビーム921,923が、その上端面においてワーク950に接しており、後退するビーム922,924がワーク950から離れた状態にある。
【0004】
ワーク950は、前進するビーム921,923の推進力によりX軸方向左側へと前進する。
次に、図10(b)に示すように、ビーム921,923が前進限まで達し、ビーム922,924が後退限まで達すると、ビーム921,923がX軸方向右側へと後退を開始し、ビーム922,924がX軸方向左側へと前進を開始する。なお、図10(b)の二点鎖線で囲んだ部分に示すように、後退するビーム921,923はワーク950からZ軸方向に離れ、代わって、前進するビーム922,924の上端面がワーク950に接する。
【0005】
図11(a)に示すように、ビーム921は、X軸方向に前進する。このとき、ビーム921の上端面にはワーク950(図10を参照)が載置されており、ワーク950は、ビーム921とともに前進する。
図11(b)に示すように、ビーム921は、前進限に達すると、ワーク950からZ軸方向下側に向けて離れる。そして、図11(c)に示すように、ビーム921は、ワーク950から離れた状態を維持しながら、X軸方向右側へと後退する。
【0006】
図11(d)に示すように、ビーム921は、後退限に達すると、ワーク950に接触するまでZ軸方向上側に向けて上昇する。
なお、図10に示すように、ビーム923は、ビーム921と同期して動き、ビーム922,924は、ビーム921とは逆の動きをする。
以上のようにして、ウォーキングビーム型の搬送装置では、ワーク950を搬送する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特許2522901号公報
【特許文献2】特開平09−268313号公報
【特許文献3】特開2007−176698号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記従来技術に係るウォーキングビーム型の搬送装置では、前進限および後退限においてビーム921〜924を上下動させるための時間を確保しておく必要があり、更なる高速運転を行うことが困難である。
本発明は、上記問題の解決を図るべくなされたものであって、複雑な構成を採用することなく、高速運転を行うことができる搬送装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明に係る搬送装置は、次の構成を採用する。
本発明に係る搬送装置は、互いの間に間隔をあけ並設された第1および第2のビームと、 第1および第2のビームをその軸芯方向に前進および後退させる駆動源とを有し、第1および第2のビームの前進時における推進力を以って対象ワークを搬送する装置である。そして、本発明に係る搬送装置では、駆動源は第1および第2のビームに対し、前進および後退を1サイクルとし、且つ、第1のビームと第2のビームとで位相のずれを有する状態に駆動力を与える。また、本発明に係る搬送装置では、第1および第2のビームのそれぞれが、その軸芯に交差する断面において、外周の一部が径方向外側に向けて突出した突出部を有した形状となっている。
【0010】
本発明に係る搬送装置において、第1および第2のビームの各々は、各軸芯を中心に回転自在になっており、前進時において、突出部の先端が対象ワークに当接するように前記軸芯周りの回転角が制御され、後退時において、突出部の先端が対象ワークから離脱するように前記軸芯周りの回転角が制御されている、ことを特徴とする。
【発明の効果】
【0011】
上記のように、本発明に係る搬送装置では、第1および第2のビームのそれぞれが、突出部が対象ワークから離れるように回転角(前記軸芯を中心とする回転角)が制御された状態で後退する。このため、上記従来技術に係る搬送装置のように、ビームの前進から後退への切り替えに際して上下動を伴う場合に比べて、第1および第2のビームのストロークを小さくすることができ、高速駆動が可能である。
【0012】
また、本発明に係る搬送装置では、第1および第2のビームの各後退時に、軸芯周りに回転させるだけで対象ワークから離脱させることができ、複雑な構造を採用する必要がない。
本発明に係る搬送装置では、突出部が対象ワークに当接する状態で前進するビームにより、その推進力が対象ワークに伝達され、これを搬送することができる。
【0013】
従って、本発明に係る搬送装置では、複雑な構成を採用することなく、高速運転を行うことができる。
上記本発明に係る搬送装置では、次のようなバリエーションを採用することができる。
上記本発明に係る搬送装置では、第1および第2のビームの各々が、軸芯に交差する断面における姿勢が正立状態となることにより突出部の先端が対象ワークに当接し、軸芯に交差する断面における姿勢が傾倒状態となることにより突出部の先端が対象ワークから離脱する、という構成を具体的に採用することができる。
【0014】
また、上記本発明に係る搬送装置では、突出部の先端が、各ビームの軸芯を中心とする同心円を以って構成された曲面となっている、という構成を採用することができる。このような構成を採用すれば、前進から後退への切り替えに際して、ビームの回転時に対象ワークに不要な力が加わることを防止でき、搬送中の対象ワークが位置ズレを起すことがない。
【0015】
また、上記本発明に係る搬送装置では、駆動源が次の第1から第3の状態を順に実行するように、第1および第2のビームに対して駆動力を伝達する、という構成を採用することができる。
(第1の状態)第1のビームが前進し、且つ、第2のビームが後退する状態。
(第2の状態)第1および第2のビームの双方が、互いに同期した状態で前進する状態。
【0016】
(第3の状態)第2のビームが前進し、且つ、第1のビームが後退する状態。
また、上記本発明に係る搬送装置では、第1のビームと同一の形状を有し、且つ、第1のビームと同期した状態で前進および後退する第3のビームと、第2のビームと同一の形状を有し、且つ、第2のビームと同期した状態で前進および後退する第4のビームとをさらに有する構成を採用することができる。そして、この場合において、第3のビームは、対象ワークの搬送中心線として、第1のビームに対して線対象の関係を以って配置され、且つ、正立か傾倒かの姿勢が制御されており、第4のビームは、対象ワークの搬送中心線として、第2のビームに対して線対象の関係を以って配置され、且つ、正立か傾倒かの姿勢が制御されている、という構成を採用することができる。このような構成を採用する場合においては、搬送中心線に対して線対象の関係を以って複数のビームが配され、また駆動するので、駆動時における対象ワークの位置ズレや進行方向に対する回転などを生じることがない。
【0017】
なお、上記のように、第3および第4のビームを併設する場合においては、第3および第4のビームが、第1および第2のビームに対し、タイミングベルトで連結されることにより同期が図られている、という構成を採用することができる。このような構成を採用すれば、搬送中における対象ワークの姿勢を傾きなく保つことができる。
また、上記本発明に係る搬送装置では、駆動源が、一つのモータと、当該モータから延出された回転軸に取り付けられた複数のカムとを有し、複数のカムの中に、表面に溝が掘られた円筒状の円筒カムと、表面に溝が掘られた板状の溝カムとが含まれているという構成を採用することができる。そして、この場合において、第1および第2のビームの前進および後退は、円筒カムを介してなされ、第1および第2のビームの各姿勢の制御は、溝カムを介してなされている、という構成を採用することができる。このような構成を採用する場合には、一つのモータで第1および第2のビームを同期駆動させることができ、高い精度での搬送動作を実現することができる。
【0018】
なお、上記のように、第3および第4のビームを追加する場合においては、上記モータから延出された回転軸にプーリを取り付け、これにタイミングベルトを用いることで、第3および第4のビームについても、モータの数を増加させることなく、それぞれ同期運転させることができる。
【図面の簡単な説明】
【0019】
【図1】実施の形態に係る搬送装置1の外観を示す模式斜視図である。
【図2】ビーム21の駆動に係る構成を示す模式側面図である。
【図3】円筒カム41の構成を示す模式正面図である。
【図4】溝カム42の構成を示す模式正面図である。
【図5】ビーム21の正立−傾倒動作を示す模式正面図である。
【図6】搬送装置1におけるビーム21〜24の動作を示す模式上面図である。
【図7】搬送装置1におけるビーム21〜24の動作を示す模式上面図である。
【図8】搬送装置1におけるビーム21〜24の動作を示す模式上面図である。
【図9】搬送装置1における搬送動作に係るタイミングチャートである。
【図10】従来技術に係る搬送装置での搬送動作を示す模式上面図である。
【図11】ビーム921の動作を示す模式側面図である。
【発明を実施するための形態】
【0020】
以下では、本発明を実施するための最良の形態について、図面を参酌しながら説明する。なお、以下の説明に係る実施の形態は、本発明の構成上の特徴および当該特徴的構成から奏される作用効果を分かりやすく説明するための一例として用いるものであって、本発明は、その本質的な特徴部分を除き、以下の内容に何ら限定を受けるものではない。
[実施の形態]
1.概略構成
実施の形態に係る搬送装置1の概略構成について、図1を用い説明する。
【0021】
図1に示すように、本実施の形態に係る搬送装置1は、ウォーキングビーム型の装置であって、テーブル状のメインフレーム10をベースに構成されている。メインフレーム10におけるZ軸方向上側の主面部10aには、X軸方向に延びる4本のビーム21〜24が並設されている。
4本のビーム21〜24は、互いの間に間隔をあけ、それぞれがX軸方向前後に往復駆動自在になっている。4本のビーム21〜24に対しては、一つの駆動部30が設けられている。駆動部30は、モータ31と、その回転軸に取り付けられたギア32との組み合わせを以って構成されている。そして、駆動部30は、メインフレーム10における主面部10aのZ軸方向下側に収納されている。
【0022】
4本のビーム21〜24の内、ビーム21とビーム22とが対をなし、ビーム23とビーム24とが対をなしている。そして、ビーム21とビーム24とは、主面部10aの搬送中心線(Y軸方向に中央をX軸方向に延びる中心線)を基準に、線対称の関係を以って配置されている。同様に、ビーム22とビーム23とも、線対称の関係を以って配置されている。
【0023】
駆動部30から延出された回転軸には、カム機構部40とプーリ51が連結されている。カム機構部40には、外周面に溝が形成された円筒カム41と、円板状をし、その一方の主面に溝が形成された溝カム42とを含んで構成されている。また、プーリ51には、タイミングベルト52が取り付けられている。
なお、搬送装置1においては、カム機構部40が、Y軸方向手前側の2本のビーム21,22に対して設けられている。Y軸方向奥側の2本のビーム23,24に対しては、図示を省略するカム機構部が設けられている。ビーム23,24に対して設けられたカム機構部は、ビーム21,22に対して設けられたカム機構部40と同一構成を有する。タイミングベルト52は、カム機構部40と、ビーム23,24に対して設けられたカム機構部とを連結するものであって、ビーム21,22とビーム23,24とを同期駆動させるのに供されている。
【0024】
搬送装置1では、ビーム21〜24がX軸方向に前進する際に、その推進力を以ってワーク500が搬送される。
2.ビーム21〜24の前後動に係る機構
ビーム21〜24の前後動に係る機構について、図2および図3を用い説明する。なお、図2では、ビーム21の前後動に係る機構のみを示している。
【0025】
図2に示すように、駆動部30は、ベース11に固定されており、その回転軸がX軸方向の右側に向けて延出されている。回転軸には、円筒カム41と2つの溝カム42,43からなるカム機構部40が取り付けられており、回転軸の回転に連動して回転する。
円筒カム41の外周面には、ループをなす一条の溝41aが形成されており、当該溝41aには、前後動アーム62に回転自在に取り付けられたカムローラ61が入り込んだ状態となっている。前後動アーム62は、Z軸方向に沿って配されており、円筒カム41の回転に伴って、X軸方向左右方向に移動する。なお、前後動アーム62は、前後動に際し、平行移動する。
【0026】
図3に示すように、円筒カム41に形成された溝41aに対して、前後動アーム62のカムローラ61の他、Y軸方向における反対側に前後動アーム162のカムローラ161が入り込んだ状態となっている。なお、前後動アーム162は、ビーム22に対応するものである。
図2に戻って、前後動アーム62には、そのZ軸方向上端部分にサブベース63が取り付けられている。サブベース63には、そのZ軸方向下側にガイドブロック64が取り付けられており、ベース11に連結されたサブベース14上に敷設されたガイドレール13に取り付けられている。このため、サブベース63は、前後動アーム62の前後動に伴って、X軸方向の左右に移動する。
【0027】
図2では、図示を省略しているが、ビーム21は、サブベース63の動きに同期した状態でX軸方向左右に移動する。
図2では、ビーム21についてのX軸方向の前後動(前進−後退)に係る機構を示しているが、他のビーム22〜24についても、同様の機構を以ってX軸方向の前後動を行う。
【0028】
3.ビーム21〜24の軸芯周りの回転に係る機構
本実施の形態に係る搬送装置1では、各ビーム21〜24がそれぞれの軸芯周りに回転自在に構成されている。当該機構について、図2、図4および図5を用い説明する。なお、図2、図4および図5では、ビーム21の回転に係る機構のみを示しているが、他のビーム22〜24についても、同様の回転に係る機構が取り付けられている。
【0029】
図2に示すように、溝カム42,43には、搖動アーム82が連結されている。当該溝カム42は、図4に示すように、円板状の外観形状を有しており、その一方の主面(図面手前側の主面)にループ状の溝42aが設けられている。そして、搖動アーム82におけるカムローラ81が回転自在で溝42a内に収められている。
図4に示すように、搖動アーム82は、カムローラ81が溝カム42の溝42a内を移動するのに対応して、Y軸方向の左右に移動する。搖動アーム82は、軸Ax73を支点に搖動し、Z軸方向上側の端点Ax75が角度θ82だけ搖動する。なお、溝カム43に連結されている搖動アームについても、同様の動きをする。
【0030】
図2に戻って、搖動アーム82は、サブベース14に軸支された支軸73に支持されている。支軸73の軸芯は、軸Ax73である(図4を参照)。そして、搖動アーム82のZ軸方向先端部分には、搖動シャフト75が取り付けられており、当該搖動シャフト75の軸芯が、端点Ax75である(図4を参照)。搖動シャフト75は、搖動ブロック71に設けられた孔を挿通している。
【0031】
ここで、搖動ブロック71は、そのZ軸方向下側にガイドブロック72が取り付けられており、ガイドブロック72は、サブベース63上に敷設されたガイドレール65に取り付けられている。このため、搖動ブロック71は、前後動アーム62の前後動に伴い、X軸方向に前後動し、搖動アーム82の搖動に伴い、紙面垂直方向に搖動する。
なお、支軸73と搖動シャフト75との間には、サブアーム74も取り付けられており、搖動シャフト82に伴い、搖動する。
【0032】
図5(a)に示すように、搖動ブロック71には、Z軸方向上側の面にギア71aが形成されている。また、上記のように、搖動シャフト75を挿通するための孔71bが設けられている。孔71bは、Z軸方向長さがY軸方向幅に比べて長い長円形となっている。搖動アーム82が、軸Ax73を支点として搖動するとき、端点Ax75が作用点となって、搖動ブロック71がY軸方向左右に移動する。
【0033】
ビーム21は、その軸芯Ax21を通る中心線L21の方向に突出した突出部21aを有し、他の部分(ベース部分)21bは、円形断面を有している。ここで、上記のように、ビーム21は、軸芯Ax21を中心として回転自在となっている。そして、ビーム21は、その断面におけるベース部分の外周に、搖動ブロック71のギア71aと噛合するギア21cが形成されている。
【0034】
図5(a)に示すように、搖動アーム82がZ軸に対して角度を有した状態にあるときには、搖動ブロック71はY軸方向右側に位置し、この状態においては、ビーム21は、その中心線L21がZ軸に沿って正立した状態となっている。
一方、図5(b)に示すように、搖動アーム82がZ軸に沿う状態に起立した状態まで搖動したときには、搖動ブロック71はY軸方向左側へと移動し、ギア71aとギア21cとにより、ビーム21を左向きに傾倒させる。即ち、この状態において、ビーム21の中心線L21は、右向きに傾斜し、それに伴い突出部21aも傾斜することになる。
【0035】
なお、突出部21aの頂面は、軸芯Ax21を中心とする曲面となっている。そして、図5(b)のようにビーム21が傾倒した状態では、図5(a)のように正立した状態にある場合よりも、突出部21aの頂面は、Z軸方向において低い状態となる。
なお、図5(a)、(b)では、図示を省略したが、搖動アーム71の孔71bと搖動シャフト75(中心が端点Ax75)の外周面との間には、磨滅防止のベアリングあるいはスリーブが介挿されている。これにより、搖動ブロック71は、前後動アーム62に連動して、紙面垂直方向に前進あるいは後退する。
【0036】
4.ビーム21〜24の前後動によるワーク500の搬送
ビーム21〜24の前後動によるワーク500の搬送動作について、図6〜図8を用い説明する。図6〜図8では、ビーム21〜24を図1のZ軸上方から平面視し、また、X軸方向左側から正面視した状態を二点鎖線で囲む部分に示す。
図6(a)に示すように、4本のビーム21〜24の内、Y軸方向の両脇に配置された2本のビーム21,24が同期状態でX軸方向左側へと前進する。このとき、Y軸方向の内側に配置された2本のビーム22,23は、X軸方向右側へと後退する。
【0037】
図6(a)の二点鎖線で囲んだ部分に示すように、紙面手前側に前進するビーム21,24では、その中心軸L21,L24がZ軸に沿って正立している。この状態においては、ビーム21,24の突出部の頂面が、ワーク500に当接しており、ワーク500を搬送する。
一方、紙面奥側に後退するビーム22,23では、その中心軸L22,L23がZ軸に対して傾斜した状態に傾倒した状態となっている。このとき、内側の2本のビーム22,23は、上記傾倒状態に姿勢が制御されているので、突出部の頂面がワーク500から離脱した状態にあり、ワーク500に影響を与えることなく後退する。
【0038】
ここで、ビーム22とビーム23とは、搬送中心に対して線対称の関係を以って傾倒された状態となっている。
後退するビーム22,23は、後退限SBに到達する手前からX軸方向の速度を落とし、また、その姿勢を傾倒状態から正立状態に向けて変化し始める。なお、ビーム22,23の姿勢は、後退限SBに到達の時点では、未だ正立状態とはなっていない。
【0039】
次に、図6(b)に示すように、ビーム22,23が後退限SBに到達した後、両ビーム22,23はX軸方向左側へとその進行方向を反転し、速度を上昇させながら前進を始める。搬送装置1では、ビーム22,23が後退限SBに到達した時点においても、両脇のビーム21,24は、未だ前進限SFには到達しておらず、前進を続ける。
図6(b)の二点鎖線で囲む部分に示すように、ビーム22,23が、前進を続けるビーム21,24と等速状態になった場合において、その姿勢が正立状態となる。この姿勢変化の完了により、ビーム21,24とビーム22,23とが、各々の突出部の頂面をワーク500に当接させた状態を以って同期状態で前進する。即ち、ビーム22,23が後退限SBに到達した後、ビーム21,24と等速の状態となった時点から、同期状態の4本のビーム21〜24によりワーク500が搬送される。
【0040】
次に、ビーム21,24は、前進限SFに到達する少し手前から、姿勢を正立状態から傾倒状態へと変化させ始めるとともに、減速し始める。この状態においては、ビーム21,24の突出部の頂面は、ワーク500から離間している。
図7(a)に示すように、両脇のビーム21,24が前進限SFに到達すると、両ビーム21,24は、X軸方向右側へとその進行方向を反転し、後退を始める。図7(a)の二点鎖線で囲んだ部分に示すように、ビーム21,24は、前進限SFに到達した時点、あるいは、後退を開始し始めた時点において、その姿勢を完全に傾倒状態と変化させ終わる。このとき、上記同様、ビーム21,24の姿勢は、搬送中心に対して線対称の関係を以って変化する。
【0041】
なお、図7(a)の状態では、前進を続けるビーム22,23が、その突出部の頂面でワーク500に当接した状態にあり、その推進力により搬送が持続されている。
図7(b)に示すように、前進状態から後退状態へと反転したビーム21,24は、後退限SBに向けて後退を続け、図7(b)の二点鎖線で囲んだ部分に示すように、ビーム21,24は、突出部の頂面がワーク500から離間した状態を維持して、後退中にワーク500に影響(例えば、ワーク500の搬送姿勢を乱すような影響)を与えないようになっている。
【0042】
後退中のビーム21,24は、後退限SBに到達する少し手前から、その姿勢を正立状態に向けて変化し始める。ただし、ビーム21,24の姿勢は、後退限SBに到達の時点では未だ正立状態にはなっていない。
次に、図8(a)に示すように、両脇のビーム21,24が後退限SBまで到達した後、加速しながら前進を始める。そして、前進を続けるビーム22,23と等速になった時点で、姿勢が正立状態へと変化し終わる。図8(a)の二点鎖線で囲む部分に示すように、4本のビーム21〜24が全て正立状態となり、且つ、同期した状態で前進をすることになる。この状態において、4本のビーム21〜24の突出部の頂面は、ワーク500に当接しており、これらの推進力を以ってワーク500が搬送される。
【0043】
ビーム22,23は、前進限SFに到達する少し手前から、その姿勢を傾倒状態へと変化させ始め、且つ、減速し始める。
図8(b)に示すように、ビーム22,23は、前進限SFに到達した時点で、進行方向をX軸方向右側へと反転させ、後退を始める。このとき、図8(b)の二点鎖線で囲んだ部分に示すように、ビーム22,23は、姿勢を正立状態から傾倒状態への変化を継続する。
【0044】
この後、搬送動作が終了するまで、図6(a)から図8(b)の動作を繰り返す。
ビーム21〜24の前後動について、そのタイミングチャートを図9に示す。図9において、“Beam1”がビーム21,24であり、“Beam2”がビーム22,23である。
図9に示すように、Beam1,2の前後動においては、S1〜S2の区間が等速範囲に設定されている。Beam1,2は、等速範囲において、前進する際には、正立状態となっており、ワーク500は、等速移動するBeam1,2により搬送される。図9に示すように、Beam1およびBeam2の各々は、前進と後退とを1サイクルとし、且つ、Beam1とBeam2とは、その前進・後退に係るサイクルの位相にズレを有している。
【0045】
また、上記のように、本実施の形態に係る搬送装置1では、Beam1とBeam2とがともに前進する期間、即ち、ビーム21〜24が前進する期間が設けられており、このときには、全てのビーム21〜24が正立状態となっている。また、当該ビーム21〜24が前進する期間では、全てのビーム21〜24(Beam1,2)の前進が等速範囲で実行される(タイミングθ1〜タイミングθ2の間、タイミングθ5〜タイミングθ6の間)。
【0046】
また、図9に示すように、搬送装置1では、ビーム21〜24が前進限SFまたは後退限SBに到達した後、各々の姿勢が正立状態から傾倒状態へと完全に変化し終わるのを待って反転移動するのではなく、姿勢が傾倒状態へと完全に変化し終わるのは、反転して前進または後退している途中の段階である(タイミングθ3、θ8)。同様に、ビーム21〜24が前進限SFまたは後退限SBに到達した際に、各々の姿勢が傾倒状態から正立状態へと変化するのであるが、これらの姿勢変化は、ビーム21〜24が前進限SFまたは後退限SBに到達した時点から変化し始めるのではなく、前進限SFまたは後退限SBに到達する前の段階から姿勢変化が開始される(タイミングθ4、θ9)。
【0047】
なお、図9にも示すように、搬送装置1では、Beam1,2が前進限SFまたは後退限SBに到達する直前、あるいは到達して反転した直後の期間(タイミングθ2〜タイミングθ3の間、タイミング180[°]〜タイミングθ5の期間、タイミングθ6〜タイミングθ7の期間)においては、等速範囲に比べて低い速度でBeam1,2が前後動する。これにより、ワーク500の搬送に対するBeam1とBeam2との切替時の衝撃が緩和される。
【0048】
[その他の事項]
上記実施の形態に係る搬送装置1では、4本のビーム21〜24を備える構成としたが、ビームの数はこれに限定されない。少なくとも2本以上のビームを備えれば同様の搬送動作を実行することが可能である。
また、上記実施の形態に係る搬送装置1では、ビーム21とビーム24が対をなして同期移動し、ビーム22とビーム23が対をなして同期移動する構成を一例として採用した。しかし、本発明は、3組あるいはそれ以上のビーム対を備え、対の数で1サイクルを分割した駆動動作を行うこともできる。例えば、3組のビーム対を備える構成を採用する場合には、カム角において、120[°]毎に各ビーム対の動作を規定することができる。
【0049】
また、上記実施の形態に係る搬送装置1では、一つのモータ31により4本のビーム21〜24を駆動する構成としたが、2つ以上のモータを採用することもできる。ただし、相互に同期をとる必要がある。
また、ビーム21〜24の形状については、図5(a)、(b)に示すような断面形状に限定されるものではない。一部が径方向に突出した部分を有する断面形状であれば採用することができる。ただし、ワーク500に対して当接および離間する頂面の形状については、当接する際、あるいは離間する際のワーク500への衝撃を小さく抑えるという観点から、姿勢変化に係る軸芯を中心とする円弧であることが望ましい。
【0050】
さらに、上記実施の形態に係る搬送装置1に対して、ワーク500が搬入されてきた際の状態を考慮するとき、前工程からの乗移りをスムーズにするために、補助となるガイドなどを取り付けておくことが望ましい。例えば、特開平09−268313号公報に開示された技術を応用することもできる。
【産業上の利用可能性】
【0051】
本発明は、ワークの高速搬送が可能な搬送装置を実現するのに有用である。
【符号の説明】
【0052】
1.搬送装置
10.メインフレーム
11.ベース
13,65.ガイドレール
14,63.サブベース
21〜24.ビーム
30.駆動部
31.モータ
32.ギア
40.カム機構部
41.円筒カム
42,43.溝カム
51.プーリ
52.タイミングベルト
61,161,81.カムローラ
62,162.前後動アーム
64,72.ガイドブロック
71.搖動ブロック
73.支軸
74.サブアーム
75.搖動シャフト
82.搖動アーム
500.ワーク
【特許請求の範囲】
【請求項1】
互いの間に間隔をあけ並設された第1および第2のビームと、 前記第1および第2のビームをその軸芯方向に前進および後退させる駆動源とを有し、前記第1および第2のビームにおける前進時の推進力を以って対象ワークを搬送する搬送装置において、
前記駆動源からは、前記第1および第2のビームの各々に対し、前記前進および前記後退を1サイクルとし、且つ、前記第1のビームと前記第2のビームとが位相のずれを有する状態に駆動力が与えられ、
前記第1および第2のビームの各々には、前記軸芯に交差する断面において、外周の一部が径方向外側に向けて突出した突出部が設けられており、
前記第1および第2のビームは、前記軸芯を中心に回転自在になっており、前進時において、前記突出部の先端が前記対象ワークに対し当接するように回転角が制御され、前記後退時において、前記突出部の先端が前記対象ワークから離脱するように回転角が制御されている
ことを特徴とする搬送装置。
【請求項2】
前記第1および第2のビームの各々は、前記断面における姿勢が正立状態となることにより前記突出部の先端が前記対象ワークに当接し、前記断面における姿勢が傾倒状態となることにより前記突出部の先端が前記対象ワークから離脱する
ことを特徴とする請求項1に記載の搬送装置。
【請求項3】
前記突出部の先端は、前記軸芯を中心とする同心円を以って構成された曲面となっている
ことを特徴とする請求項2に記載の搬送装置。
【請求項4】
前記駆動源は、
前記第1のビームが前進し、且つ、前記第2のビームが後退する第1の状態と、
前記第1および第2のビームの双方が、互いに同期した状態で前進する第2の状態と、
前記第2のビームが前進し、且つ、前記第1のビームが後退する第3の状態と、
をこの順に実行するように、前記第1および第2のビームに対し駆動力を伝達する
ことを特徴とする請求項1から3の何れかに記載の搬送装置。
【請求項5】
前記第1のビームと同一の形状を有し、且つ、前記第1のビームと同期した状態で前進および後退する第3のビームと、
前記第2のビームと同一の形状を有し、且つ、前記第2のビームと同期した状態で前進および後退する第4のビームと、
を有し、
前記第3のビームは、前記対象ワークの搬送中心線として、前記第1のビームに対して線対象の関係を以って配置され、且つ、前記姿勢が制御されており、
前記第4のビームは、前記対象ワークの搬送中心線として、前記第2のビームに対して線対象の関係を以って配置され、且つ、前記姿勢が制御されている
ことを特徴とする請求項1から4の何れかに記載の搬送装置。
【請求項6】
前記第3および第4のビームは、前記第1および第2のビームに対し、タイミングベルトで連結されることにより同期が図られている
ことを特徴とする請求項5に記載の搬送装置。
【請求項7】
前記駆動源は、一つのモータと、当該モータから延出された回転軸に取り付けられた複数のカムとを有し、
前記複数のカムには、表面に溝が掘られた円筒状の円筒カムと、表面に溝が掘られた板状の溝カムとが含まれており、
前記第1および第2のビームの前進および後退は、前記円筒カムを介してなされ、
前記第1および第2のビームの各姿勢の制御は、前記溝カムを介してなされている
ことを特徴とする請求項1から6の何れかに記載の搬送装置。
【請求項1】
互いの間に間隔をあけ並設された第1および第2のビームと、 前記第1および第2のビームをその軸芯方向に前進および後退させる駆動源とを有し、前記第1および第2のビームにおける前進時の推進力を以って対象ワークを搬送する搬送装置において、
前記駆動源からは、前記第1および第2のビームの各々に対し、前記前進および前記後退を1サイクルとし、且つ、前記第1のビームと前記第2のビームとが位相のずれを有する状態に駆動力が与えられ、
前記第1および第2のビームの各々には、前記軸芯に交差する断面において、外周の一部が径方向外側に向けて突出した突出部が設けられており、
前記第1および第2のビームは、前記軸芯を中心に回転自在になっており、前進時において、前記突出部の先端が前記対象ワークに対し当接するように回転角が制御され、前記後退時において、前記突出部の先端が前記対象ワークから離脱するように回転角が制御されている
ことを特徴とする搬送装置。
【請求項2】
前記第1および第2のビームの各々は、前記断面における姿勢が正立状態となることにより前記突出部の先端が前記対象ワークに当接し、前記断面における姿勢が傾倒状態となることにより前記突出部の先端が前記対象ワークから離脱する
ことを特徴とする請求項1に記載の搬送装置。
【請求項3】
前記突出部の先端は、前記軸芯を中心とする同心円を以って構成された曲面となっている
ことを特徴とする請求項2に記載の搬送装置。
【請求項4】
前記駆動源は、
前記第1のビームが前進し、且つ、前記第2のビームが後退する第1の状態と、
前記第1および第2のビームの双方が、互いに同期した状態で前進する第2の状態と、
前記第2のビームが前進し、且つ、前記第1のビームが後退する第3の状態と、
をこの順に実行するように、前記第1および第2のビームに対し駆動力を伝達する
ことを特徴とする請求項1から3の何れかに記載の搬送装置。
【請求項5】
前記第1のビームと同一の形状を有し、且つ、前記第1のビームと同期した状態で前進および後退する第3のビームと、
前記第2のビームと同一の形状を有し、且つ、前記第2のビームと同期した状態で前進および後退する第4のビームと、
を有し、
前記第3のビームは、前記対象ワークの搬送中心線として、前記第1のビームに対して線対象の関係を以って配置され、且つ、前記姿勢が制御されており、
前記第4のビームは、前記対象ワークの搬送中心線として、前記第2のビームに対して線対象の関係を以って配置され、且つ、前記姿勢が制御されている
ことを特徴とする請求項1から4の何れかに記載の搬送装置。
【請求項6】
前記第3および第4のビームは、前記第1および第2のビームに対し、タイミングベルトで連結されることにより同期が図られている
ことを特徴とする請求項5に記載の搬送装置。
【請求項7】
前記駆動源は、一つのモータと、当該モータから延出された回転軸に取り付けられた複数のカムとを有し、
前記複数のカムには、表面に溝が掘られた円筒状の円筒カムと、表面に溝が掘られた板状の溝カムとが含まれており、
前記第1および第2のビームの前進および後退は、前記円筒カムを介してなされ、
前記第1および第2のビームの各姿勢の制御は、前記溝カムを介してなされている
ことを特徴とする請求項1から6の何れかに記載の搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2010−215356(P2010−215356A)
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願番号】特願2009−63810(P2009−63810)
【出願日】平成21年3月17日(2009.3.17)
【出願人】(592127965)NKE株式会社 (28)
【Fターム(参考)】
【公開日】平成22年9月30日(2010.9.30)
【国際特許分類】
【出願日】平成21年3月17日(2009.3.17)
【出願人】(592127965)NKE株式会社 (28)
【Fターム(参考)】
[ Back to top ]