
搬送装置

【課題】アーチ状に配置された複数の搬送ローラを一本の駆動軸により一括で回転駆動させる搬送装置において、回転伝達部品の点数を減らす。
【解決手段】複数の搬送ローラ110A〜110EはワークWが搬送される方向に沿ってアーチ状に配置される。駆動軸120は曲げ弾性を有し、複数の搬送ローラ110A〜110Eのアーチ状の配置に追従するように弾性変形の範囲内でアーチ状に撓まされている。複数の第1歯車130A〜130Eは各搬送ローラ110A〜110Eに対応して駆動軸120に軸方向に並んで固定される。複数の第2歯車140A〜140Eは各搬送ローラ110A〜110Eの回転軸に固定され、第1歯車とともに駆動軸120の回転を各搬送ローラに伝達する。複数の軸受150A〜150Gはアーチ状に撓まされた駆動軸120に追従するようにアーチ状に配置され、駆動軸120を軸支する。モータ160は駆動軸120を回転駆動する。
【解決手段】複数の搬送ローラ110A〜110EはワークWが搬送される方向に沿ってアーチ状に配置される。駆動軸120は曲げ弾性を有し、複数の搬送ローラ110A〜110Eのアーチ状の配置に追従するように弾性変形の範囲内でアーチ状に撓まされている。複数の第1歯車130A〜130Eは各搬送ローラ110A〜110Eに対応して駆動軸120に軸方向に並んで固定される。複数の第2歯車140A〜140Eは各搬送ローラ110A〜110Eの回転軸に固定され、第1歯車とともに駆動軸120の回転を各搬送ローラに伝達する。複数の軸受150A〜150Gはアーチ状に撓まされた駆動軸120に追従するようにアーチ状に配置され、駆動軸120を軸支する。モータ160は駆動軸120を回転駆動する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、連続したフィルム、箔などの長尺シートを搬送方向に配列される複数の搬送ローラを用いて搬送する搬送装置に関する。
【背景技術】
【0002】
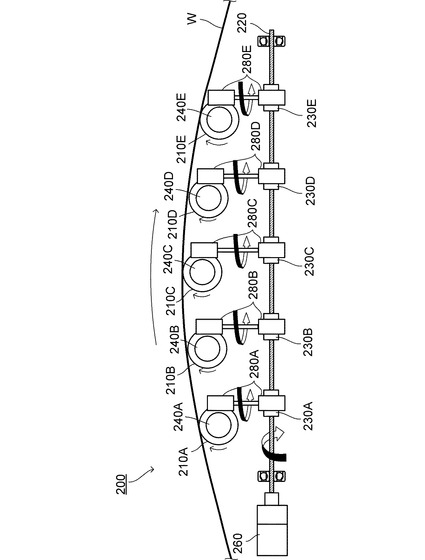
連続したフィルム、箔などの長尺シート(以下、ワークと称する。)を搬送方向に配列される複数の搬送ローラを用いて搬送する搬送装置(例えば、特許文献1参照。)では、搬送ローラがワークに対してスリップすることでワークにスリップ痕などがつく問題がある。そこで、図7に示すように、複数の搬送ローラ210A〜210EをワークWが搬送される方向に沿ってアーチ状に配置し、これらの搬送ローラ210A〜210Eに対するワークWの巻付け角を持たせることにより摩擦抵抗をアップさせ、スリップを抑制することが行われていた。
【0003】
また、この搬送装置200には、スリップをさらに抑制するために、複数の搬送ローラ210A〜210Eに主従関係をなくすべく、すべての搬送ローラ210A〜210Eを一括で回転駆動させる駆動機構が付加されている。この駆動機構は、モータ260、モータ260により回転駆動される駆動軸220、および回転伝達部品を備える。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−180436号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このような搬送装置200では、アーチ状に配置されている搬送ローラ210A〜210Eに対して、駆動軸220は直棒状であるため水平に配置されることが一般的である。このため、各搬送ローラ210A〜210Eと駆動軸220との距離が一定とはならず、数多くの回転伝達部品が必要となる。図7に示す例では、各搬送ローラ210A〜210Eについて、回転伝達部品として、駆動軸220に固定される第1歯車230A〜230E、各搬送ローラ210A〜210Eの回転軸の一端に固定される第2歯車240A〜240E、および第1,第2歯車間に設けられるウォームギアなどの第3歯車280A〜280Eの三種類の歯車が必要となる。
【0006】
このため、コスト高となり、量産用の搬送装置としては不向きである。特に、加熱処理炉など、高温環境およびクリーン環境の下でこのような搬送装置を使用する場合には、構成部品の熱膨張および回転伝達部品からの発塵の影響により安定的に稼働させることが難しかった。
【0007】
本発明は、上記課題に鑑みてなされたものであり、アーチ状に配置された複数の搬送ローラを一本の駆動軸により一括で回転駆動させる搬送装置において、回転伝達部品の点数を減らすことを目的とする。
【課題を解決するための手段】
【0008】
本発明の搬送装置は、複数の搬送ローラ、駆動軸、複数の第1歯車、複数の第2歯車、複数の軸受、およびモータを備えている。前記複数の搬送ローラは、ワークが搬送される方向に沿ってアーチ状に配置される。前記駆動軸は、曲げ弾性を有し、複数の搬送ローラの前記アーチ状の配置に追従するように弾性変形の範囲内でアーチ状に撓まされる。前記複数の第1歯車は、各前記搬送ローラに対応して前記駆動軸に軸方向に並んで固定される。前記複数の第2歯車は、各前記搬送ローラの回転軸に固定され、前記第1歯車とともに前記駆動軸の回転を各前記搬送ローラに伝達する。前記複数の軸受は、前記アーチ状に撓まされた前記駆動軸に追従するようにアーチ状に配置され、前記駆動軸を軸支する。前記モータは、前記駆動軸を回転駆動する。
【0009】
この構成によると、アーチ状に配置された複数の搬送ローラに追従するように駆動軸を撓ませた状態で回転させることにより、各搬送ローラと駆動軸との距離が一定となる。したがって、最低限の回転伝達部品(第1,第2歯車)により搬送ローラの駆動を実現可能となる。
【0010】
また、前記軸受の位置は、第1歯車の近傍が好ましい。これによると、駆動軸に機械応力の作用する箇所で軸支することが出来、駆動軸に作用する曲げモーメントの変動を抑制することが可能である。すなわち、撓まされた駆動軸を安定して軸支することが出来る。また、軸受を駆動軸に直交する揺動軸を中心に揺動可能に構成することにより、軸受が自動調芯機能を持つようになる。よって、軸受の繊細な位置決め(角度決め)が必要とされない。
【発明の効果】
【0011】
本発明によると、アーチ状に配置された複数の搬送ローラを一本の駆動軸により一括で回転駆動させる搬送装置において、回転伝達部品の点数を減らすことが可能となる。特に、加熱処理炉など、高温環境およびクリーン環境の下でこのような搬送装置を使用する場合でも、構成部品の熱膨張および回転伝達部品からの発塵の影響がなく、安定的に稼働させることが容易となる。
【図面の簡単な説明】
【0012】
【図1】この発明の一実施形態に係る搬送装置の概略構成を、側方から見て示す図である。
【図2】上記搬送装置の概略構成を示す平断面図である。
【図3】図1における矢視III-III線断面図である。
【図4】図3における矢視IV-IV線断面図である。
【図5】図1における矢視V-V線断面図である。
【図6】この発明の他の実施形態に係る搬送装置の概略構成を、側方から見て示す図である。
【図7】関連技術に係る搬送装置の概略構成を、側方から見て示す図である。
【発明を実施するための形態】
【0013】
以下に、この発明の実施の形態に係る搬送装置の構成を図1〜図5を参照して説明する。本実施の形態の搬送装置は、連続したフィルム、箔などの長尺シート(以下、ワークと称する。)を搬送方向に配列される複数の搬送ローラを用いて搬送するものである。このような搬送装置の用途は特に限定されないが、例えば、上記ワークの表面に連続的に加熱処理を施す加熱処理炉などに好適である。
【0014】
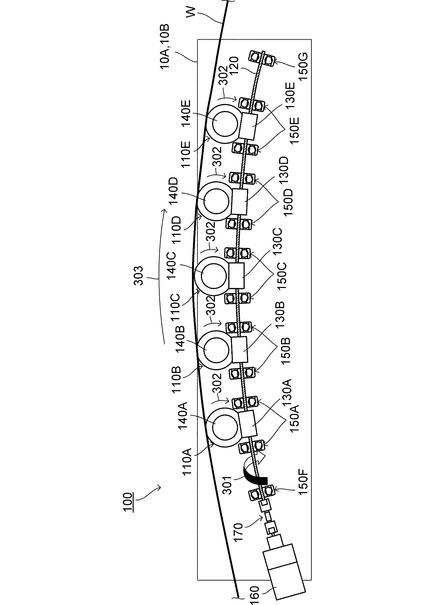
図1、図2に示すように、本実施の形態の搬送装置100は、複数(本実施の形態では5個)の搬送ローラ110A〜110E、駆動軸120、複数(同5個)の第1歯車130A〜130E、複数(同5個)の第2歯車140A〜140E、複数(同7個)の軸受150A〜150G、およびモータ160を備えている。なお、上記の搬送ローラ、第1歯車、第2歯車および軸受の個数は一例であって、限定されない。
【0015】
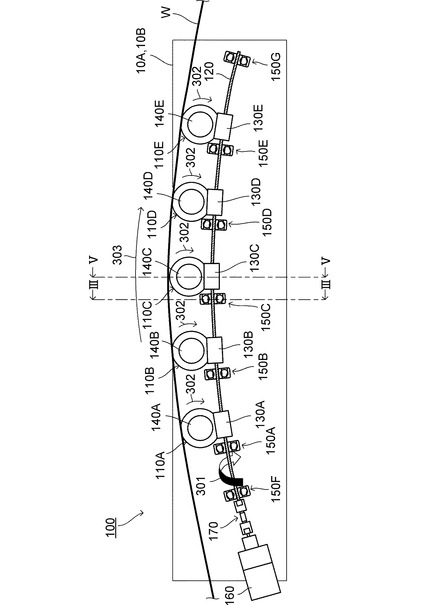
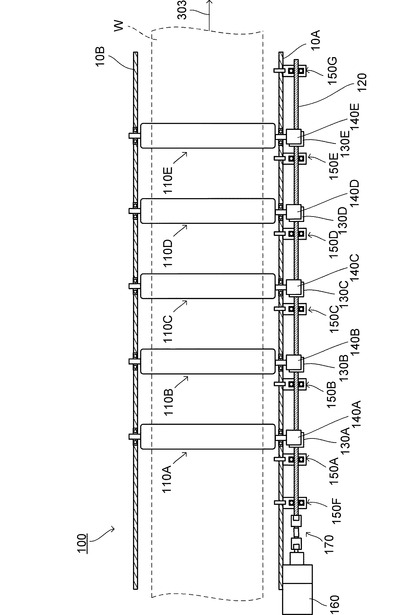
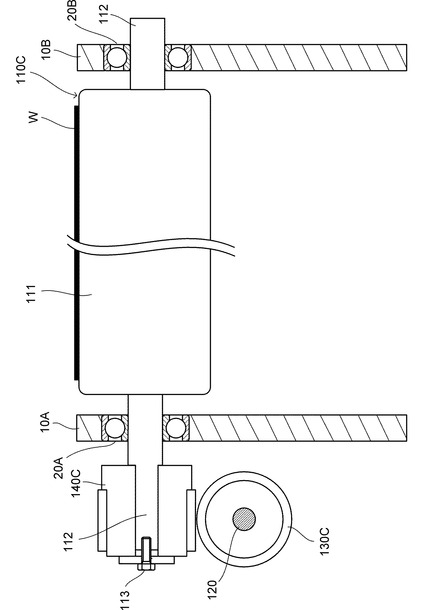
複数の搬送ローラ110A〜110Eは、図1に示すように、ワークWが搬送される方向に沿ってアーチ状に配置される。各搬送ローラ110A〜110Eは、図2に示すように、対向して配置される一対のフレーム板10A,10Bに回転自在に支持されている。より具体的には、図5に示すように、各搬送ローラ110A〜110Eは、回転軸112および回転軸112に固定されたローラ本体111を備え、回転軸112が軸受20A,20Bを介してフレーム板10A,10Bに支持されている。
【0016】
駆動軸120は、曲げ弾性を有する材料から製作された棒状部材である。図1に示すように、駆動軸120は複数の搬送ローラ110A〜110Eのアーチ状の配置に追従するように弾性変形の範囲内でアーチ状に撓まされている。駆動軸120は、軸に直交する方向に加えられた曲げモーメントのみで弾性変形させられており、駆動軸120の軸方向(スラスト方向)に作用する力はないものとする。図5に示すように、駆動軸120は、搬送ローラ110A〜110Eの一端部の下方に配置される。図2に示すように、駆動軸120の軸方向は、搬送ローラ110A〜110Eの軸方向に対して直交している。
【0017】
本発明では、このように撓んだ駆動軸120を撓んだまま(曲げモーメントを維持したまま)回転させるため、以下に説明する機構を採用する。
【0018】
図1に示すように、複数の第1歯車130A〜130Eは、各搬送ローラ110A〜110Eに対応して駆動軸120に軸方向に並んで固定されている。第1歯車130A〜130Eは、駆動軸120が回転されると、駆動軸120と共に回転する。
【0019】
図5に第2歯車140Cについて示すように、各第2歯車140A〜140Eはそれぞれ、各搬送ローラ110A〜110Eの回転軸112の一端に固定されている。第2歯車140A〜140Eは、第1歯車130A〜130Eとともに駆動軸120の回転を各搬送ローラ110A〜110Eに伝達する。
【0020】
第1歯車130A〜130Eはすべて同一の部品、第2歯車140A〜140Eもすべて同一の部品を用いる。これにより、すべての搬送ローラ104A〜104Eの周速が同一となり、ワークWの搬送にすべり箇所をなくすことが出来る。
【0021】
第1,第2歯車130A〜130E,140A〜140Eは、駆動軸120の矢印301方向(図1参照。)の回転を、各搬送ローラ110A〜110Eの矢印302方向(図1参照。)の回転に変換するものである。つまり、回転方向を直交方向に変換する歯車の組み合わせである。このような第1歯車130A〜130Eの組み合わせは、一般的なウォームギアとウォームホイールの組み合わせでも構わない。しかし、第1歯車130A〜130Eは撓んだ駆動軸120に固定されている関係で、駆動軸120が撓む平面(図1における紙面)内での第1歯車130A〜130Eの回転軸の微少な変動は避けられない。したがって、このような第1歯車130A〜130Eの回転軸の変動を考慮して、歯車同士のバックラッシに余裕を持たせられる歯車の組み合わせが好ましい。そのような歯車の組み合わせとしては、非接触式であるマグネットギアを好適に使用出来る。これによると、回転伝達部品からの発塵がなく、クリーンな環境下での使用に適する。
【0022】
複数の軸受150A〜150Gは、アーチ状に撓まされた駆動軸120に追従するようにアーチ状に配置され、駆動軸120を軸支する。ここで、軸受150F,150Gは駆動軸120の両端を軸支しているが、軸受150A〜150Eは、軸受150F,150Gの間で駆動軸120を軸支している。このように、駆動軸120を複数箇所で中継して軸支することにより、撓まされた駆動軸120を安定して支持することが出来る。
【0023】
中継点に設ける軸受150A〜150Eの位置は、第1歯車130A〜130Eの近傍が好ましい。これによると、駆動軸120に機械応力の作用する箇所で軸支することが出来、回転に伴い駆動軸120に作用する曲げモーメントの変動を抑制することが可能である。すなわち、撓まされた駆動軸120を安定して軸支することが出来る。
【0024】
なお、第1歯車130A〜130Eの近傍であれば、図1に示すように、駆動軸120の軸方向について各第1歯車130A〜130Eの片側に軸受150A〜150Eを設けても良いし、図6に示すように各第1歯車130A〜130Eの両側に設けても良い。ただし、高温環境下の使用での構成部品(特に、フレーム板10Aや駆動軸120)の熱膨張により予想される支持箇所の変位の影響や部品コストを考慮すると、駆動軸120の支持箇所は少ない方が望ましい。その意味で、図1に示すように各第1歯車130A〜130Eの片側で支持する方が好ましい。
【0025】
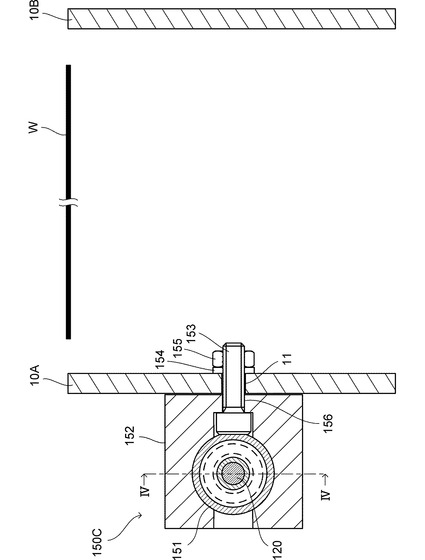
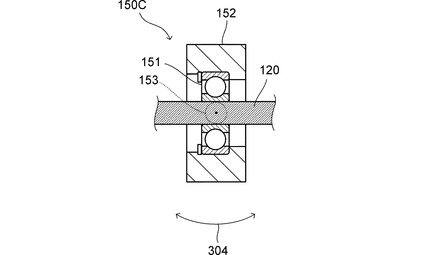
さらに、軸受150A〜150Gは、駆動軸120に直交する揺動軸(図3のボルト153参照。)を中心に揺動自在に配設されている。具体的には、図3、図4に示すように、軸受150A〜150Gは、図3、図4に示すように、駆動軸120を支持する軸受本体151、軸受本体151を保持する軸受ホルダー152から構成される。軸受ホルダー152の背面側には雌ネジが切られたネジ穴156が形成される。フレーム板10Aには、ボルト153の軸部が挿通される穴11が貫通している。軸受ホルダー152には内側からネジ穴156に対してボルト153を組み付け、軸受ホルダー152の背面から突出するボルト153のネジ部の先端を、フレーム板10Aの穴11に挿入し、フレーム板10Aの背面よりワッシャ154およびナット155を締め付けて固定する。締め付け後に、ナット155を若干(1/4回転程度)緩めることで、ボルト153が駆動軸120に直交する揺動軸となり、揺動軸を中心に軸受本体151が軸受ホルダー152ごと矢印304方向(図4参照。)に揺動可能となる。
【0026】
このように軸受150A〜150Gを揺動可能に構成することにより、軸受150A〜150Gが自動調芯機能を持つようになる。換言すれば、高温環境下の使用での構成部品(特に、フレーム板10Aや駆動軸120)の熱膨張により予想される支持箇所の変位を吸収出来る。このため、軸受150A〜150Gの繊細な位置決め(角度決め)が必要とされない。また、熱膨張の量を使用温度の変更等へ追従させることが容易となる。
【0027】
図1に示すように、モータ160は駆動軸120の一端に連結されて駆動軸120を回転駆動する。モータ160への負荷を軽減するため、モータ160の軸方向が駆動軸120の一端における接線方向にほぼ一致するように、モータ160は図示の如く水平に対して傾けて配置することが望ましい。また、高温環境下の使用での駆動軸120の熱膨張により予想される連結箇所の変位を考慮して、モータ160の軸をボールカップリングなどのユニバーサルジョイント170を用いて駆動軸120に連結すると良い。これによると、モータ160の位置決め(角度決め)の精度が要求されない。
【0028】
本実施の形態の搬送装置100の動作を、図1を参照しながら説明する。モータ160によりアーチ状に撓まされた駆動軸120が矢印301方向に回転駆動されると、この駆動軸120の回転が、各第1,第2歯車130A〜130E,140A〜140Eを介して各搬送ローラ110A〜110Eに矢印302方向に直角に向きを変えて伝達される。これにより、1つのモータ160および一本の駆動軸120により一括で、アーチ状に配置された搬送ローラ110A〜110Eのすべて矢印302方向に回転駆動することが出来る。この結果、矢印303で示すように、搬送ローラ110A〜110E上に巻き付き角を持った状態で載せられた長尺シート状のワークWを、スリップを抑制しながら効率よく搬送出来る。
【0029】
本実施の形態によると、駆動軸120を撓ませた状態で回転させることにより、最低限の回転伝達部品(第1、第2歯車)により搬送ローラ110A〜110Eの駆動を実現出来る。したがって、回転伝達部品の点数を減らすことが可能となる。
【0030】
上述の実施形態の説明は、すべての点で例示であって、制限的なものではないと考えられるべきである。この発明の範囲は、上述の実施形態ではなく、特許請求の範囲によって示される。さらに、この発明の範囲には、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0031】
100−搬送装置
110A〜110E−搬送ローラ
120−駆動軸
130A〜130E−第1歯車
140A〜140E−第2歯車
150A〜150G−軸受
160−モータ
【技術分野】
【0001】
この発明は、連続したフィルム、箔などの長尺シートを搬送方向に配列される複数の搬送ローラを用いて搬送する搬送装置に関する。
【背景技術】
【0002】
連続したフィルム、箔などの長尺シート(以下、ワークと称する。)を搬送方向に配列される複数の搬送ローラを用いて搬送する搬送装置(例えば、特許文献1参照。)では、搬送ローラがワークに対してスリップすることでワークにスリップ痕などがつく問題がある。そこで、図7に示すように、複数の搬送ローラ210A〜210EをワークWが搬送される方向に沿ってアーチ状に配置し、これらの搬送ローラ210A〜210Eに対するワークWの巻付け角を持たせることにより摩擦抵抗をアップさせ、スリップを抑制することが行われていた。
【0003】
また、この搬送装置200には、スリップをさらに抑制するために、複数の搬送ローラ210A〜210Eに主従関係をなくすべく、すべての搬送ローラ210A〜210Eを一括で回転駆動させる駆動機構が付加されている。この駆動機構は、モータ260、モータ260により回転駆動される駆動軸220、および回転伝達部品を備える。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−180436号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このような搬送装置200では、アーチ状に配置されている搬送ローラ210A〜210Eに対して、駆動軸220は直棒状であるため水平に配置されることが一般的である。このため、各搬送ローラ210A〜210Eと駆動軸220との距離が一定とはならず、数多くの回転伝達部品が必要となる。図7に示す例では、各搬送ローラ210A〜210Eについて、回転伝達部品として、駆動軸220に固定される第1歯車230A〜230E、各搬送ローラ210A〜210Eの回転軸の一端に固定される第2歯車240A〜240E、および第1,第2歯車間に設けられるウォームギアなどの第3歯車280A〜280Eの三種類の歯車が必要となる。
【0006】
このため、コスト高となり、量産用の搬送装置としては不向きである。特に、加熱処理炉など、高温環境およびクリーン環境の下でこのような搬送装置を使用する場合には、構成部品の熱膨張および回転伝達部品からの発塵の影響により安定的に稼働させることが難しかった。
【0007】
本発明は、上記課題に鑑みてなされたものであり、アーチ状に配置された複数の搬送ローラを一本の駆動軸により一括で回転駆動させる搬送装置において、回転伝達部品の点数を減らすことを目的とする。
【課題を解決するための手段】
【0008】
本発明の搬送装置は、複数の搬送ローラ、駆動軸、複数の第1歯車、複数の第2歯車、複数の軸受、およびモータを備えている。前記複数の搬送ローラは、ワークが搬送される方向に沿ってアーチ状に配置される。前記駆動軸は、曲げ弾性を有し、複数の搬送ローラの前記アーチ状の配置に追従するように弾性変形の範囲内でアーチ状に撓まされる。前記複数の第1歯車は、各前記搬送ローラに対応して前記駆動軸に軸方向に並んで固定される。前記複数の第2歯車は、各前記搬送ローラの回転軸に固定され、前記第1歯車とともに前記駆動軸の回転を各前記搬送ローラに伝達する。前記複数の軸受は、前記アーチ状に撓まされた前記駆動軸に追従するようにアーチ状に配置され、前記駆動軸を軸支する。前記モータは、前記駆動軸を回転駆動する。
【0009】
この構成によると、アーチ状に配置された複数の搬送ローラに追従するように駆動軸を撓ませた状態で回転させることにより、各搬送ローラと駆動軸との距離が一定となる。したがって、最低限の回転伝達部品(第1,第2歯車)により搬送ローラの駆動を実現可能となる。
【0010】
また、前記軸受の位置は、第1歯車の近傍が好ましい。これによると、駆動軸に機械応力の作用する箇所で軸支することが出来、駆動軸に作用する曲げモーメントの変動を抑制することが可能である。すなわち、撓まされた駆動軸を安定して軸支することが出来る。また、軸受を駆動軸に直交する揺動軸を中心に揺動可能に構成することにより、軸受が自動調芯機能を持つようになる。よって、軸受の繊細な位置決め(角度決め)が必要とされない。
【発明の効果】
【0011】
本発明によると、アーチ状に配置された複数の搬送ローラを一本の駆動軸により一括で回転駆動させる搬送装置において、回転伝達部品の点数を減らすことが可能となる。特に、加熱処理炉など、高温環境およびクリーン環境の下でこのような搬送装置を使用する場合でも、構成部品の熱膨張および回転伝達部品からの発塵の影響がなく、安定的に稼働させることが容易となる。
【図面の簡単な説明】
【0012】
【図1】この発明の一実施形態に係る搬送装置の概略構成を、側方から見て示す図である。
【図2】上記搬送装置の概略構成を示す平断面図である。
【図3】図1における矢視III-III線断面図である。
【図4】図3における矢視IV-IV線断面図である。
【図5】図1における矢視V-V線断面図である。
【図6】この発明の他の実施形態に係る搬送装置の概略構成を、側方から見て示す図である。
【図7】関連技術に係る搬送装置の概略構成を、側方から見て示す図である。
【発明を実施するための形態】
【0013】
以下に、この発明の実施の形態に係る搬送装置の構成を図1〜図5を参照して説明する。本実施の形態の搬送装置は、連続したフィルム、箔などの長尺シート(以下、ワークと称する。)を搬送方向に配列される複数の搬送ローラを用いて搬送するものである。このような搬送装置の用途は特に限定されないが、例えば、上記ワークの表面に連続的に加熱処理を施す加熱処理炉などに好適である。
【0014】
図1、図2に示すように、本実施の形態の搬送装置100は、複数(本実施の形態では5個)の搬送ローラ110A〜110E、駆動軸120、複数(同5個)の第1歯車130A〜130E、複数(同5個)の第2歯車140A〜140E、複数(同7個)の軸受150A〜150G、およびモータ160を備えている。なお、上記の搬送ローラ、第1歯車、第2歯車および軸受の個数は一例であって、限定されない。
【0015】
複数の搬送ローラ110A〜110Eは、図1に示すように、ワークWが搬送される方向に沿ってアーチ状に配置される。各搬送ローラ110A〜110Eは、図2に示すように、対向して配置される一対のフレーム板10A,10Bに回転自在に支持されている。より具体的には、図5に示すように、各搬送ローラ110A〜110Eは、回転軸112および回転軸112に固定されたローラ本体111を備え、回転軸112が軸受20A,20Bを介してフレーム板10A,10Bに支持されている。
【0016】
駆動軸120は、曲げ弾性を有する材料から製作された棒状部材である。図1に示すように、駆動軸120は複数の搬送ローラ110A〜110Eのアーチ状の配置に追従するように弾性変形の範囲内でアーチ状に撓まされている。駆動軸120は、軸に直交する方向に加えられた曲げモーメントのみで弾性変形させられており、駆動軸120の軸方向(スラスト方向)に作用する力はないものとする。図5に示すように、駆動軸120は、搬送ローラ110A〜110Eの一端部の下方に配置される。図2に示すように、駆動軸120の軸方向は、搬送ローラ110A〜110Eの軸方向に対して直交している。
【0017】
本発明では、このように撓んだ駆動軸120を撓んだまま(曲げモーメントを維持したまま)回転させるため、以下に説明する機構を採用する。
【0018】
図1に示すように、複数の第1歯車130A〜130Eは、各搬送ローラ110A〜110Eに対応して駆動軸120に軸方向に並んで固定されている。第1歯車130A〜130Eは、駆動軸120が回転されると、駆動軸120と共に回転する。
【0019】
図5に第2歯車140Cについて示すように、各第2歯車140A〜140Eはそれぞれ、各搬送ローラ110A〜110Eの回転軸112の一端に固定されている。第2歯車140A〜140Eは、第1歯車130A〜130Eとともに駆動軸120の回転を各搬送ローラ110A〜110Eに伝達する。
【0020】
第1歯車130A〜130Eはすべて同一の部品、第2歯車140A〜140Eもすべて同一の部品を用いる。これにより、すべての搬送ローラ104A〜104Eの周速が同一となり、ワークWの搬送にすべり箇所をなくすことが出来る。
【0021】
第1,第2歯車130A〜130E,140A〜140Eは、駆動軸120の矢印301方向(図1参照。)の回転を、各搬送ローラ110A〜110Eの矢印302方向(図1参照。)の回転に変換するものである。つまり、回転方向を直交方向に変換する歯車の組み合わせである。このような第1歯車130A〜130Eの組み合わせは、一般的なウォームギアとウォームホイールの組み合わせでも構わない。しかし、第1歯車130A〜130Eは撓んだ駆動軸120に固定されている関係で、駆動軸120が撓む平面(図1における紙面)内での第1歯車130A〜130Eの回転軸の微少な変動は避けられない。したがって、このような第1歯車130A〜130Eの回転軸の変動を考慮して、歯車同士のバックラッシに余裕を持たせられる歯車の組み合わせが好ましい。そのような歯車の組み合わせとしては、非接触式であるマグネットギアを好適に使用出来る。これによると、回転伝達部品からの発塵がなく、クリーンな環境下での使用に適する。
【0022】
複数の軸受150A〜150Gは、アーチ状に撓まされた駆動軸120に追従するようにアーチ状に配置され、駆動軸120を軸支する。ここで、軸受150F,150Gは駆動軸120の両端を軸支しているが、軸受150A〜150Eは、軸受150F,150Gの間で駆動軸120を軸支している。このように、駆動軸120を複数箇所で中継して軸支することにより、撓まされた駆動軸120を安定して支持することが出来る。
【0023】
中継点に設ける軸受150A〜150Eの位置は、第1歯車130A〜130Eの近傍が好ましい。これによると、駆動軸120に機械応力の作用する箇所で軸支することが出来、回転に伴い駆動軸120に作用する曲げモーメントの変動を抑制することが可能である。すなわち、撓まされた駆動軸120を安定して軸支することが出来る。
【0024】
なお、第1歯車130A〜130Eの近傍であれば、図1に示すように、駆動軸120の軸方向について各第1歯車130A〜130Eの片側に軸受150A〜150Eを設けても良いし、図6に示すように各第1歯車130A〜130Eの両側に設けても良い。ただし、高温環境下の使用での構成部品(特に、フレーム板10Aや駆動軸120)の熱膨張により予想される支持箇所の変位の影響や部品コストを考慮すると、駆動軸120の支持箇所は少ない方が望ましい。その意味で、図1に示すように各第1歯車130A〜130Eの片側で支持する方が好ましい。
【0025】
さらに、軸受150A〜150Gは、駆動軸120に直交する揺動軸(図3のボルト153参照。)を中心に揺動自在に配設されている。具体的には、図3、図4に示すように、軸受150A〜150Gは、図3、図4に示すように、駆動軸120を支持する軸受本体151、軸受本体151を保持する軸受ホルダー152から構成される。軸受ホルダー152の背面側には雌ネジが切られたネジ穴156が形成される。フレーム板10Aには、ボルト153の軸部が挿通される穴11が貫通している。軸受ホルダー152には内側からネジ穴156に対してボルト153を組み付け、軸受ホルダー152の背面から突出するボルト153のネジ部の先端を、フレーム板10Aの穴11に挿入し、フレーム板10Aの背面よりワッシャ154およびナット155を締め付けて固定する。締め付け後に、ナット155を若干(1/4回転程度)緩めることで、ボルト153が駆動軸120に直交する揺動軸となり、揺動軸を中心に軸受本体151が軸受ホルダー152ごと矢印304方向(図4参照。)に揺動可能となる。
【0026】
このように軸受150A〜150Gを揺動可能に構成することにより、軸受150A〜150Gが自動調芯機能を持つようになる。換言すれば、高温環境下の使用での構成部品(特に、フレーム板10Aや駆動軸120)の熱膨張により予想される支持箇所の変位を吸収出来る。このため、軸受150A〜150Gの繊細な位置決め(角度決め)が必要とされない。また、熱膨張の量を使用温度の変更等へ追従させることが容易となる。
【0027】
図1に示すように、モータ160は駆動軸120の一端に連結されて駆動軸120を回転駆動する。モータ160への負荷を軽減するため、モータ160の軸方向が駆動軸120の一端における接線方向にほぼ一致するように、モータ160は図示の如く水平に対して傾けて配置することが望ましい。また、高温環境下の使用での駆動軸120の熱膨張により予想される連結箇所の変位を考慮して、モータ160の軸をボールカップリングなどのユニバーサルジョイント170を用いて駆動軸120に連結すると良い。これによると、モータ160の位置決め(角度決め)の精度が要求されない。
【0028】
本実施の形態の搬送装置100の動作を、図1を参照しながら説明する。モータ160によりアーチ状に撓まされた駆動軸120が矢印301方向に回転駆動されると、この駆動軸120の回転が、各第1,第2歯車130A〜130E,140A〜140Eを介して各搬送ローラ110A〜110Eに矢印302方向に直角に向きを変えて伝達される。これにより、1つのモータ160および一本の駆動軸120により一括で、アーチ状に配置された搬送ローラ110A〜110Eのすべて矢印302方向に回転駆動することが出来る。この結果、矢印303で示すように、搬送ローラ110A〜110E上に巻き付き角を持った状態で載せられた長尺シート状のワークWを、スリップを抑制しながら効率よく搬送出来る。
【0029】
本実施の形態によると、駆動軸120を撓ませた状態で回転させることにより、最低限の回転伝達部品(第1、第2歯車)により搬送ローラ110A〜110Eの駆動を実現出来る。したがって、回転伝達部品の点数を減らすことが可能となる。
【0030】
上述の実施形態の説明は、すべての点で例示であって、制限的なものではないと考えられるべきである。この発明の範囲は、上述の実施形態ではなく、特許請求の範囲によって示される。さらに、この発明の範囲には、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0031】
100−搬送装置
110A〜110E−搬送ローラ
120−駆動軸
130A〜130E−第1歯車
140A〜140E−第2歯車
150A〜150G−軸受
160−モータ
【特許請求の範囲】
【請求項1】
ワークが搬送される方向に沿ってアーチ状に配置される複数の搬送ローラと、
曲げ弾性を有し、前記複数の搬送ローラの前記アーチ状の配置に追従するように弾性変形の範囲内でアーチ状に撓まされた駆動軸と、
各前記搬送ローラに対応して前記駆動軸に軸方向に並んで固定された複数の第1歯車と、
各前記搬送ローラの回転軸に固定され、前記第1歯車とともに前記駆動軸の回転を各前記搬送ローラに伝達する第2歯車と、
前記アーチ状に撓まされた前記駆動軸に追従するようにアーチ状に配置され、前記駆動軸を軸支する複数の軸受と、
前記駆動軸を回転駆動するモータと、
を有する搬送装置。
【請求項2】
前記軸受は、前記第1歯車の近傍で前記駆動軸を軸支する請求項1に記載の搬送装置。
【請求項3】
前記軸受は、各前記第1歯車の軸方向について片側にのみ配置される請求項2に記載の搬送装置。
【請求項4】
前記軸受を、前記駆動軸に直交する揺動軸を中心に揺動自在に配設した請求項2に記載の搬送装置。
【請求項5】
前記第1および第2歯車をマグネットギアとした請求項1〜4のいずれかに記載の搬送装置。
【請求項6】
前記モータの軸を、前記駆動軸にユニバーサルジョイントを介して連結した請求項1〜5のいずれかに記載の搬送装置。
【請求項1】
ワークが搬送される方向に沿ってアーチ状に配置される複数の搬送ローラと、
曲げ弾性を有し、前記複数の搬送ローラの前記アーチ状の配置に追従するように弾性変形の範囲内でアーチ状に撓まされた駆動軸と、
各前記搬送ローラに対応して前記駆動軸に軸方向に並んで固定された複数の第1歯車と、
各前記搬送ローラの回転軸に固定され、前記第1歯車とともに前記駆動軸の回転を各前記搬送ローラに伝達する第2歯車と、
前記アーチ状に撓まされた前記駆動軸に追従するようにアーチ状に配置され、前記駆動軸を軸支する複数の軸受と、
前記駆動軸を回転駆動するモータと、
を有する搬送装置。
【請求項2】
前記軸受は、前記第1歯車の近傍で前記駆動軸を軸支する請求項1に記載の搬送装置。
【請求項3】
前記軸受は、各前記第1歯車の軸方向について片側にのみ配置される請求項2に記載の搬送装置。
【請求項4】
前記軸受を、前記駆動軸に直交する揺動軸を中心に揺動自在に配設した請求項2に記載の搬送装置。
【請求項5】
前記第1および第2歯車をマグネットギアとした請求項1〜4のいずれかに記載の搬送装置。
【請求項6】
前記モータの軸を、前記駆動軸にユニバーサルジョイントを介して連結した請求項1〜5のいずれかに記載の搬送装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−23378(P2013−23378A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−162920(P2011−162920)
【出願日】平成23年7月26日(2011.7.26)
【出願人】(000167200)光洋サーモシステム株式会社 (180)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月26日(2011.7.26)
【出願人】(000167200)光洋サーモシステム株式会社 (180)
【Fターム(参考)】
[ Back to top ]