
携帯端末装置及び方位提示方法
【課題】ユーザに目標位置への方位を直感的に提示可能な携帯端末装置及び方位提示方法を提供する。
【解決手段】携帯端末装置は、筐体と、複数の振動体と、制御部とを具備する。上記複数の振動体は、上記筐体の内部に設けられている。上記制御部は、上記筐体の位置から目標位置への方位を判定し、判定結果に基づいて上記複数の振動体のうち少なくとも1つの振動体を駆動することで、上記方位を提示する振動を上記筐体に発生させるように構成されている。
【解決手段】携帯端末装置は、筐体と、複数の振動体と、制御部とを具備する。上記複数の振動体は、上記筐体の内部に設けられている。上記制御部は、上記筐体の位置から目標位置への方位を判定し、判定結果に基づいて上記複数の振動体のうち少なくとも1つの振動体を駆動することで、上記方位を提示する振動を上記筐体に発生させるように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
本技術は、ユーザに目標位置への方位を提示する携帯端末装置及び方位提示方法に関する。
【背景技術】
【0002】
従来、ユーザに対して目標物への方位を提示することが可能な携帯機器が知られている。例えば、携帯機器の画面の法線方向と目標物の方向とのなす角度に応じて、携帯機器の画面に目標物への方向を矢印で表示したり、バイブレータを振動させたりする技術が知られている(特許文献1 段落0047,0054参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−168647号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した技術では、ユーザに対して方位を提示するために、主に携帯機器の画面に矢印等の視覚情報が用いられる。このため、ユーザは目標物への移動の際に携帯機器の画面を見る必要がある。また、バイブレータが用いられているもののユーザに対して振動により直感的に目標物への方位を知らせることができる携帯機器は知られていない。
【0005】
以上のような事情に鑑み、本技術の目的は、ユーザに目標位置への方位を直感的に提示可能な携帯端末装置及び方位提示方法を提供することにある。
【課題を解決するための手段】
【0006】
本技術の一形態に係る携帯端末装置は、筐体と、複数の振動体と、制御部とを具備する。上記複数の振動体は、上記筐体の内部に設けられている。上記制御部は、上記筐体の位置から目標位置への方位を判定し、判定結果に基づいて上記複数の振動体のうち少なくとも1つの振動体を駆動することで、上記方位を提示する振動を上記筐体に発生させるように構成されている。
【0007】
上記携帯端末装置によれば、上記制御部は、上記筐体の位置から目標位置への方位を判定し、判定結果に基づいて上記複数の振動体のうち少なくとも1つの振動体を駆動することで、上記方位を提示する振動を上記筐体に発生させて、目標位置への方位をユーザに直感的に提示することができる。
【0008】
なお、振動体としては、一軸方向に振動を発生させるボイスコイルモータ、回転する偏心錘の遠心力を利用して多軸方向に振動を発生させる振動モータ等が挙げられる。振動の強さ(振幅)、振動周期(周波数)、振動方向等、ユーザが区別し得る態様で変更が可能である。
【0009】
上記制御部は、上記判定結果に基づいて、上記複数の振動体のうち所定の複数の振動体を順に所定の時間間隔で振動させるようにしてもよい。ここで、所定の時間間隔とは、例えば4ms以上10ms以下である。これにより、目標への方位に沿ってなぞるような触感や目標の方位へ向かって手を飛び越えるような触感をユーザに与えることができる。
【0010】
上記筐体は、上記筐体の長手方向に平行な2辺と上記長手方向に直交する2辺とを有する直方体形状を有し、上記複数の振動体は、上記4辺の各中央位置に対応するように配設されているようにしてもよい。
【0011】
これにより、直交する2方向の各向きに向かう方位を直感的にユーザに提示することができる。
【0012】
上記筐体は、上記筐体の長手方向に平行な第1の方向及び上記第1の方向に直交する第2の方向を有する直方体形状を有し、上記複数の振動体は、上記筐体の中心に交点が位置するように上記第1の方向及び上記第2の方向にそれぞれ複数配設されているようにしてもよい。
【0013】
これにより、筐体の長手方向や長手方向に直交する方向に手をなぞるような感覚をユーザに提示して、直感的に方向をユーザに提示することができる。
【0014】
上記制御部は、上記判定結果に基づいて、上記複数の振動体のうち少なくとも2個の振動体を同時に振動させるようにしてもよい。
【0015】
これにより、同時に振動した2個の振動体の中央の位置が振動したかのようにユーザに感じさせて、直感的に方位を提示することができる。
【0016】
上記筐体は、直方体形状を有し、上記複数の振動体は、上記筐体の4つの角に対応するように配設されているようにしてもよい。
【0017】
これにより、2個の角に対応するように配設された2個の振動体を振動させることで、2個の角の間の中間の位置が振動したかのようにユーザに感じさせて、ユーザに直感的に方位を提示することができる。
【0018】
上記筐体は、直方体形状を有し、上記複数の振動体は、上記筐体の周縁に沿うように配設されているようにしてもよい。
【0019】
これにより、筐体の周縁に沿って配設された複数の振動体を同時に振動させることで、ユーザにより確実に方位を提示することができる。
【0020】
上記複数の振動体は、隣接するように配設されており、上記制御部は、上記判定結果に基づいて、上記複数の振動体のうち隣り合う振動体を順に所定の時間間隔で振動させるようにしてもよい。
【0021】
これにより、手をなぞるような触感をより確実にユーザに与えることができる。
【0022】
上記複数の振動体は、振動の波形が例えば正弦波であるようにしてもよい。これにより、触覚だけでなく力覚をユーザに提示することで、方位をユーザにより分かり易く提示することができる。
【0023】
上記携帯端末装置は、上記筐体の位置の情報である第1の位置情報を取得し出力する第1の位置情報取得ユニットと、上記目標位置の位置の情報である第2の位置情報を取得し出力する第2の位置情報取得ユニットと、上記筐体の方位の情報である方位情報を取得し出力する方位情報取得ユニットとを更に具備してもよい。この場合、上記制御部は、上記第1の位置情報、上記方位情報及び上記第2の位置情報に基づき、上記筐体の位置から目標位置への方位を判定する。
【0024】
これにより、筐体の位置の情報、筐体の方位の情報及び目標位置の位置の情報に基づき、筐体の位置から目標位置への方位を判定することができる。
【0025】
本技術の一形態に係る方位提示方法は、筐体の位置の情報である第1の位置情報を取得することを含む。
目標位置の位置の情報である第2の位置情報が取得される。
上記筐体の方位の情報である方位情報が取得される。
上記第1の位置情報、上記方位情報及び上記第2の位置情報に基づき、上記筐体の位置から上記目標位置への方位が判定される。
判定結果に基づいて、上記複数の振動体のうち少なくとも1つの振動体を駆動することで、上記方位を提示する振動が上記筐体に発生させられる。
【発明の効果】
【0026】
以上のように本技術によれば、ユーザに目標位置への方位を直感的に提示することができる。
【図面の簡単な説明】
【0027】
【図1】本技術の一実施形態に係る携帯端末装置を示す平面図である。
【図2】図1に示す携帯端末装置の内部構造を示すブロック図である。
【図3】図1に示す携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。
【図4】上記携帯端末装置の一動作例を説明するフローチャートである。
【図5】上記携帯端末装置の他の動作例を説明するフローチャートである。
【図6】本技術の第2の実施形態に係る携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。
【図7】図6に示す携帯端末装置の一動作例を説明するフローチャートである。
【図8】本技術の第3の実施形態に係る携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。
【図9】図8に示す携帯端末装置の一動作例を説明するフローチャートである。
【図10】本技術の第4の実施形態に係る携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。
【図11】図10に示す携帯端末装置の一動作例を説明するフローチャートである。
【発明を実施するための形態】
【0028】
以下、本技術に係る実施形態を、図面を参照しながら説明する。
<第1の実施形態>
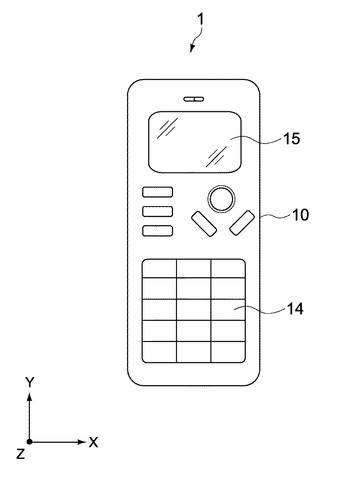
図1は、本技術の一実施形態に係る携帯端末装置を示す平面図であり、図2は、図1に示す携帯端末装置の内部構造を示すブロック図である。なお、図中X方向は携帯端末装置の長手方向に直交する方向、Y方向は携帯端末装置の長手方向、Z方向はX軸及びY軸に直交する方向を示している。
【0029】
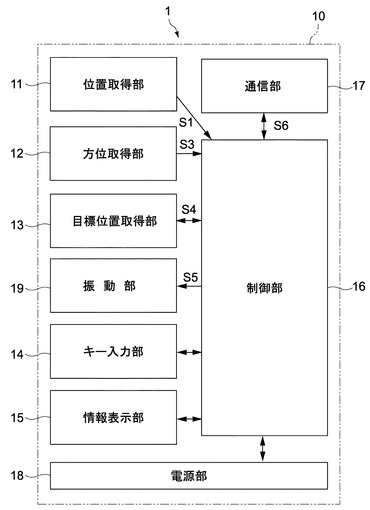
携帯端末装置1は、筐体10と、位置取得部11と、方位取得部12と、目標位置取得部13と、キー入力部14と、情報表示部15と、制御部16と、通信部17と、電源部18と、振動部19とを有する。
【0030】
筐体10は、例えば略直方体形状であり、ユーザが把持できる大きさを有し、筐体10の一方の表面側には複数のキー入力部14や情報表示部15が配置されている。
【0031】
位置取得部11は、携帯端末装置1の位置情報を取得し、位置情報に応じた出力信号S1を制御部16に出力する。具体的には、位置取得部11は、GPSモジュールが用いられる。出力信号S1には、携帯端末装置1の位置を示す緯度、経度等の位置情報が含まれている。
【0032】
方位取得部12は、携帯端末装置1の方位情報を取得し、方位情報に応じた出力信号S3を制御部16に出力する。具体的には、方位取得部12は、地磁気センサを用いることができる。出力信号S3には、携帯端末装置1の方位の情報が含まれている。
【0033】
目標位置取得部13は、ユーザによりキー入力部14から設定された地図上の特定の目標位置の位置を示す経度、緯度等の位置情報を取得(記憶)可能であり、制御部16からの指令に基づき出力信号S4を制御部16に出力する。出力信号S4には、ユーザにより設定された地図上の特定の目標位置の位置を示す経度、緯度等の位置情報が含まれている。
【0034】
キー入力部14は、筐体10の表面に適宜配置された押圧式のキーを含む。なお、キー入力部14は、機械式のキーに限られず、スライド式、静電式、光学式の操作部を含んでもよい。キー入力部14の出力信号には、キー操作等の各種操作に関する情報が含まれる。
【0035】
情報表示部15は、筐体10の表面に所望の大きさで組み込まれたディスプレイで構成される。
【0036】
制御部16は、ROM、RAM、CPU(MPU)を含み、携帯端末装置1の各部へ電源を供給するとともに携帯端末装置1の動作を制御する。制御部16は、位置取得部11の出力信号S1、方位取得部12の出力信号S3及び目標位置取得部13の出力信号S4に基づいて、携帯端末装置1の方位を基準として携帯端末装置1の位置から目標位置への方位を判定し、判定結果に基づき振動部19の振動を制御するための駆動信号S5を生成する。具体的には、この判定は、携帯端末装置1の方位と、携帯端末装置1の位置から目標位置への方位とのなす角度を判定する。
【0037】
制御部16のROMには、例えば予め地図等のデータなどが記憶されている。
【0038】
通信部17は、図示しないデータサーバとの間で各種データを通信可能とする無線通信モジュールで構成されるが、有線通信でもよい。通信方式は特に制限されず、「Bluetooth」(登録商標)などの機器間通信でもよいし、インターネットを経由した通信でもよい。通信部17は、制御部16と信号S6を送受信する。
【0039】
電源部18は、携帯端末装置1の電源を構成し、筐体10内部の各部へ必要な電力を供給する。電源部18は、典型的にはバッテリで構成される。バッテリは一次電池でもよいし、二次電池でもよい。また電源部18は、太陽電池で構成されてもよい。なお、有線やワイヤレス給電の場合、電源部18は不要である。
【0040】
振動部19は、制御部16からの駆動信号S5に基づき振動が制御される。
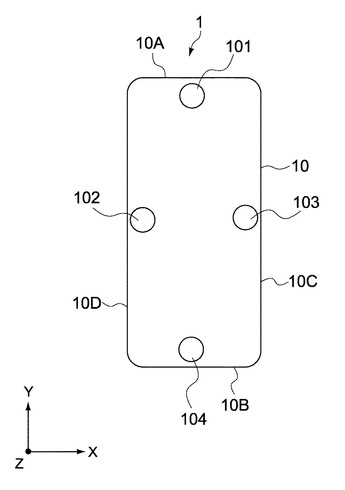
図3は、図1に示す携帯端末装置1に内蔵された振動部19の複数の振動体の配設位置を示す図である。
【0041】
振動部19は、複数の振動体101、102、103、104を備えている。複数の振動体101〜104は、筐体10の端部近くで筐体10に内蔵されている。複数の振動体101〜104は、筐体10の4辺10A、10B、10C、10Dの各中央位置に対応するように配設されている。4個の振動体101〜104は、同一平面(XY平面)内に配設されている。具体的には、複数の振動体101〜104は、例えばボイスコイルモータで構成される。振動体101、104は、例えばそれぞれボイスコイルモータの可動軸がY軸に平行となるように配設されている。振動体102、103は、例えばそれぞれボイスコイルモータの可動軸がX軸に平行となるように配設されている。ボイスコイルモータは、その振動の波形が例えば正弦波となるように構成されている。
【0042】
なお、これら複数の振動体101〜104の配設位置については、図3に示す位置に限定されず、例えば筐体10に内蔵されている他の部品の配設位置に応じて適宜変更可能である。
【0043】
(携帯端末装置1の動作例)
次に、携帯端末装置1の動作例を説明する。
【0044】
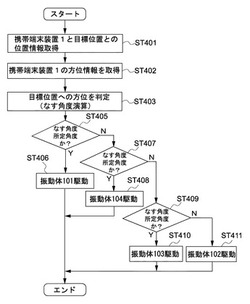
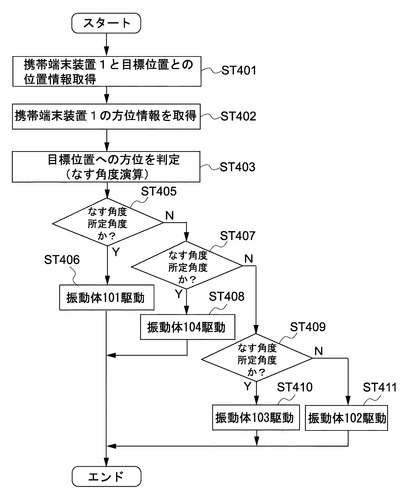
図4は、携帯端末装置1の一動作例を説明するフローチャートである。本動作例では、ユーザにより予めキー入力部14から地図上の特定の目標位置が設定されているものとする。つまり、目標位置取得部13に地図上の特定の目標位置の位置情報が記憶されているものとする。
【0045】
携帯端末装置1の制御部16は、位置取得部11からの出力信号S1と目標位置取得部13からの出力信号S4を取得し(ST401)。これにより、制御部16は、携帯端末装置1の位置情報と、地図上の特定の目標位置の位置情報とを取得する。
【0046】
制御部16は、方位取得部12からの出力信号S3を取得する(ST402)。これにより、制御部16は、携帯端末装置1の方位の情報を取得する。
【0047】
制御部16は、ST401で取得した携帯端末装置1の位置情報と、地図上の特定の目標位置の位置情報と、ST402で取得した携帯端末装置1の方位の情報とに基づき、携帯端末装置1の方位を基準とした携帯端末装置1から特定の目標位置への方位を判定する(ST403)。具体的には、携帯端末装置1の方位と、携帯端末装置1から特定の目標位置への方位とのなす角度を演算する。このなす角度の定義については、適宜設定可能であるが、本実施形態では、例えば携帯端末装置1のY方向プラス方位を基準(0度)として、時計回りに増加するものとする。
【0048】
次いで、制御部16は、この判定結果(なす角度)が0度以上45度未満又は315度以上360度未満であるか否かを判定し(ST405)、肯定判定の場合には、振動体101を駆動するための駆動信号S5を振動体101に出力し駆動体101を駆動する(ST406)。
【0049】
ST405で否定判定のときには、制御部16は、なす角度が135度以上225度未満か否かを判定し(ST407)、肯定判定の場合には、振動体104を駆動するための駆動信号S5を振動体104に出力し、振動体104を駆動する(ST408)。
【0050】
ST407で否定判定のときには、制御部16は、なす角度が45度以上135度未満であるか否かを判定し(ST409)、肯定判定の場合には、振動体103を駆動するための駆動信号S5を振動体103に出力し、振動体103を駆動する(ST410)。
【0051】
ST409で否定判定のときには、つまり、なす角度が225度以上315度未満の場合には、制御部16は、振動体102に駆動信号S5を出力し、振動体102を駆動する(ST411)。
【0052】
このように本実施形態によれば、携帯端末装置1の制御部16は、携帯端末装置1の方位(Y方向プラス方位)を基準として携帯端末装置1の位置から特定の目標位置への方位を判定し(ST403)、判定結果に基づいて複数の振動体101〜104のうちいずれか1つを駆動する(ST405〜ST411)。これにより、目標位置への方位を提示する振動を筐体10に発生させて、目標位置への方位をユーザに直感的に提示することができる。このとき、複数の振動体101〜104が筐体10の内部で筐体10の端部近くに設けられているため、筐体10の中央を基準位置とした目標位置への方位をユーザに直感的に提示することができる。
【0053】
本実施形態では、複数の振動体101〜104は、筐体10の4辺10A、10B、10C、10Dの各中央位置に対応するように配設されている。このため、複数の振動体101〜104の振動をユーザが明確に区別することができる。このように、少ない振動体101〜104で明確かつ直感的にユーザに方位を提示することができる。
【0054】
振動体101、104は、それぞれボイスコイルモータの可動軸がY軸に平行となるように配設されており、振動体102、103は、それぞれボイスコイルモータの可動軸がX軸に平行となるように配設されている。また、振動体101〜104は、その振動の波形が例えば正弦波となるように構成されている。このため、振動体の振動方向と提示される方向とを同じにして触感だけでない力覚をユーザに提示することができる。
【0055】
次に、携帯端末装置1の別の動作例を説明する。
図5は、携帯端末装置1の他の動作例を説明するフローチャートである。
【0056】
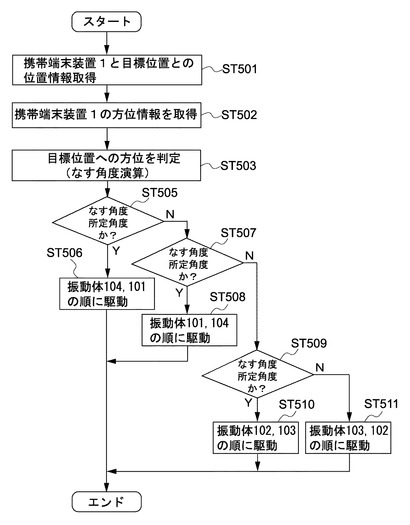
本動作例では、図5に示すST501〜ST503は、図4に示すST401〜ST403と同様であるので、その説明を省略し、ST505以降について説明する。
【0057】
制御部16は、なす角度が0度以上45度未満又は315度以上360度未満であるか否かを判定し(ST505)、肯定判定の場合には、振動体104、101をこの順に予め定められた所定の時間間隔で駆動する(ST506)。この所定の時間間隔とは、例えば4ms以上10ms以下とすることができる(以下、他の所定の時間間隔についても、同様に、例えば4ms以上10ms以下とする。)。これにより、ユーザに確実に異なる2刺激であるという感触を与えることができる。このとき、制御部16は、振動体104の振動の大きさより振動体101の振動の大きさが大きくなるように振動体104、101の振動を制御する。
【0058】
ステップ505で否定判定のときには、制御部16は、なす角度が135度以上225度未満か否かを判定し(ST507)、肯定判定の場合には、振動体101、104をこの順に所定の時間間隔で駆動する(ST508)。このとき、制御部16は、振動体101の振動の大きさより振動体104の振動の大きさが大きくなるように振動体101、104の振動を制御する。
【0059】
ステップ507で否定判定のときには、制御部16は、なす角度が45度以上135度未満であるか否かを判定し(ST509)、肯定判定の場合には、振動体102、103をこの順に所定の時間間隔で駆動する(ST510)。このとき、制御部16は、振動体102の振動の大きさより振動体103の振動の大きさが大きくなるように振動体102、103の振動を制御する。
【0060】
ステップ509で否定判定のときには、つまり、なす角度が225度以上315度未満の場合には、振動体103、102をこの順に所定の時間間隔で駆動する(ST511)。このとき、制御部16は、振動体103の振動の大きさより振動体102の振動の大きさが大きくなるように振動体103、102の振動を制御する。
【0061】
このように本動作例によれば、複数の振動体を所定の順に所定の時間間隔で駆動させることができるので、最初に駆動する振動体から後に駆動する振動体への方位をユーザに直感的に提示することができる。このとき、最初の振動体の振動の大きさより後の振動体の振動の大きさが大きいので、ユーザに明確に方位を提示することができる。
【0062】
また、例えば振動体101と、振動体104とは、筐体10のY方向に大きく離間して設けられているので、制御部16が、振動体104、101を順に振動させた場合に、手を振動が飛び越えていくような感覚をユーザに与えることができ、直感的に方位を提示することができる。
【0063】
本実施形態では、地図上の特定の目標位置への直感的な方位提示について説明したが、制御部16がROMに記憶されている地図情報に基づいて目標位置への方位提示(ルート提示、ルートガイド)をする機能を備えるようにしてもよい。この機能は、例えばユーザが目標位置を設定し携帯端末装置1の情報表示部15に表示された地図を見ながら目的位置に向かう場合に有効に利用可能である。具体的には、携帯端末装置1は、ユーザによる目標位置の入力に対して、地図と、現在位置から目標位置への最短ルートとを情報表示部15に表示すると共に、ユーザがこの最短ルートを通過できるようにするために最短ルートへ向かう方位を示す振動体の振動を発生させる。例えば、携帯端末装置1は、地図情報に基づき、現在位置から目標位置へ直線的に向かう道路がないと判断した場合には、最短ルートを検索し、現在位置から目標位置への方位とは違う最短ルートへ向かう方位を提示する。これにより、ユーザは、地図からの視覚的情報を取得しつつ振動による直感的な提示を受けて、より確実かつ短時間で目標位置へ到達することができる。
【0064】
この場合、携帯端末装置1が、ユーザの目標位置の入力に対して、ユーザの選択可能な複数のルートを提示するようにしてもよい。このようにすることで、ユーザビリティーを向上させることができる。また、この方位提示を行うアプリケーションは、起動後終了迄、方位提示のために継続的に振動体の振動を発生させるモードと、起動後、携帯端末装置1の現在位置が地図上の交差点等から所定の距離以内になっているときに振動体の振動を発生させるモードとを有するようにしてもよい。このようにすることで、振動体の振動の時間を抑制して省電力化を図ることができる。なお、このルート提示機能及びルートガイド機能については、後述する実施形態に本実施形態と同様に付加してもよい。
【0065】
<第2の実施形態>
図6は、本技術の第2の実施形態に係る携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。なお、本実施形態では、上記実施形態に比べて、複数の振動体の配設位置及び複数の振動体の制御が異なるので、同一の構成要素等には同一の符号を付しその説明を省略し、異なる箇所を中心に説明する。
【0066】
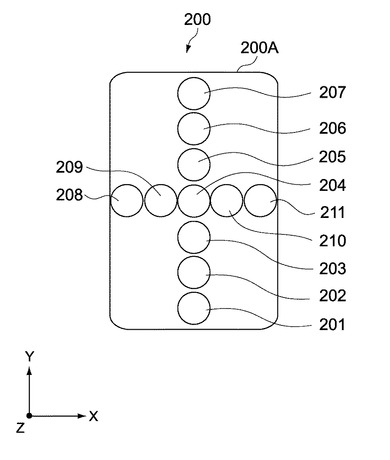
本実施形態の携帯端末装置200は、上記実施形態の複数の振動体101〜104に代えて、複数の振動体201、202、203、204、205、206、207、208、209、210、211を備えている。複数の振動体201〜211は、筐体200Aの中心に交点が位置するように十字状に配設されている。つまり、複数の振動体201〜207は、Y方向に平行にかつY方向プラス向きにこの順に互いに隣接するように配設されている。複数の振動体208、209、204、210、211は、X方向に平行にかつX方向プラス向きにこの順に互いに隣接するように配設されている。振動体204は、十字の交点に対応した位置には配置されている。振動体201、207、208、211は、それぞれ筐体200Aの端部付近に配設されている。複数の振動体201〜211は、XY平面内に含まれるように設けられている。なお、複数の振動体201〜211の配設位置は、筐体200Aに内蔵されている他の部品等の位置に応じて適宜変更可能である。
【0067】
第2の実施形態の制御部は、位置取得部11の出力信号S1、方位取得部12の出力信号S3及び目標位置取得部13の出力信号S4に基づいて、携帯端末装置200の方位を基準として携帯端末装置200から目標位置への方位(なす角度)を判定し、この判定結果(なす角度)に基づき、複数の振動体201〜207を所定の順に所定の時間間隔で振動させるための駆動信号を生成、又は複数の振動体208、209、204、210、211を所定の順に所定の時間間隔で振動させるための駆動信号を生成し、複数の振動体201〜207又は複数の振動体208、209、204、210、211に出力することが可能に構成されている。
【0068】
図7は、図6に示す携帯端末装置200の一動作例を説明するフローチャートである。
【0069】
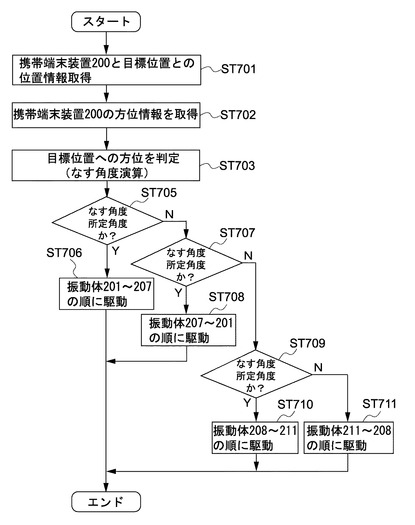
本動作例では、図7に示すST701〜ST703は、図4に示すST401〜ST403(なす角度を演算するまで)と同様であるので、その説明を省略し、ST705以降について説明する。
【0070】
第2の実施形態の制御部16は、この制御部16による判定結果(なす角度)が0度以上45度未満又は315度以上360度未満であるか否かを判定し(ST705)、肯定判定の場合には、振動体201、202、203、204、205、206、207をこの順に所定の時間間隔で駆動する(ST706)。
【0071】
ST705で否定判定のときには、制御部16は、なす角度が135度以上225度未満か否かを判定し(ST707)、肯定判定の場合には、振動体207、206、205、204、203、202、201をこの順に所定の時間間隔で駆動する(ST708)。
【0072】
ST707で否定判定のときには、制御部16は、なす角度が45度以上135度未満であるか否かを判定し(ST709)、肯定判定の場合には、振動体208、209、204、210、211をこの順に所定の時間間隔で駆動する(ST710)。
【0073】
ST709で否定判定のときには、つまり、なす角度が225度以上315度未満の場合には、制御部16は、振動体211、210、204、209、208をこの順に所定の時間間隔で駆動する(ST711)。
【0074】
このように本実施形態によれば、Y方向に隣り合うように配設された複数の振動体201〜207をこの順又は逆順に所定の時間間隔(例えば4ms以上10ms以下)で振動させたり、又は、X方向に隣り合うように配設された複数の振動体208、209、204、210、211をこの順又は逆順に所定の時間間隔(例えば4ms以上10ms以下)で振動させたりすることができる。この結果、手のひらの異なる箇所を順になぞられるような触感をユーザに与えて、ユーザに直感的に方位を提示することができる。
【0075】
このとき、刺激変数として、刺激をユーザに提示する時間である刺激の提示時間、提示時間間隔、刺激間距離等を適宜調整することが好ましい。特に重要な刺激変数は、刺激の提示時間、提示時間間隔であることが知られているので、これらを調整することがより好ましい。
【0076】
具体的には、複数の振動体201〜207をこの順に所定の時間間隔で駆動する場合に、振動体201と振動体207との振動の振幅を振動体202〜206の振動の振幅より大きくすることで、手をなぞるような感覚に加えて手を振動が飛び越えるような感覚をユーザに与えることで、より直感的に方位を提示することができる。また、制御部16が、複数の振動体201〜207を順に、徐々に振動の振幅が大きくなるように制御したり、又は徐々に振動時間が長くなるように制御したりするように制御してもよい。
【0077】
<第3の実施形態>
図8は、本技術の第3の実施形態に係る携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。なお、本実施形態では、上記実施形態に比べて、複数の振動体の配設位置及び振動体の制御が異なるので、同一の構成要素等には同一の符号を付しその説明を省略し、異なる箇所を中心に説明する。
【0078】
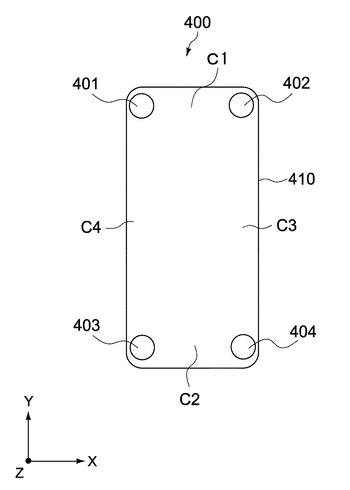
本実施形態の携帯端末装置400は、上記第1の実施形態の複数の振動体101〜104に代えて、複数の振動体401、402、403、404を備えている。複数の振動体401〜404は、携帯端末装置400の筐体410の4つの角に近接して筐体410に内蔵されている。複数の振動体401〜404は、XY平面内に含まれるように設けられている。なお、複数の振動体401〜404の配設位置は、図8に示す位置に限定されず、例えば筐体410に内蔵されている他の部品の配設位置に応じて適宜変更可能である。
【0079】
第3の実施形態の制御部16は、位置取得部11の出力信号S1、方位取得部12の出力信号S3及び目標位置取得部13の出力信号S4に基づいて、携帯端末装置400の方位を基準として携帯端末装置400から目標位置への方位を判定する。制御部16は、この判定結果(なす角度)に基づき、複数の振動体401〜404のうち所定の2個の振動体を同時に振動させるための駆動信号を生成し、この所定の2個の振動体に出力することが可能に構成されている。次に、具体的な制御について説明する。
【0080】
図9は、図8に示す携帯端末装置400の一動作例を説明するフローチャートである。
【0081】
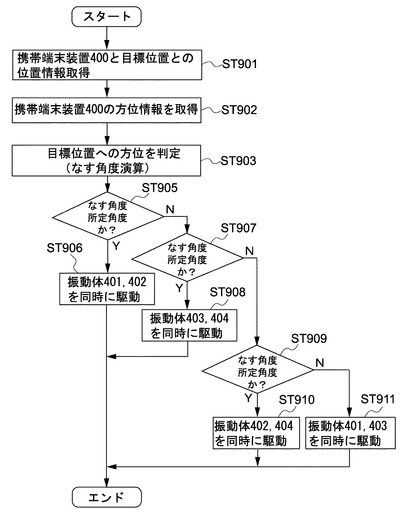
本動作例は、図9に示すST901〜ST903は、図4に示すST401〜ST403(なす角度を演算するまで)と同様であるので、その説明を省略し、ST905以降について説明する。
【0082】
第3の実施形態の制御部16は、この制御部16による判定結果(なす角度)が0度以上45度未満又は315度以上360度未満であるか否かを判定し(ST905)、肯定判定の場合には、振動体401、402を同時に同時間、同じ振幅で駆動する(ST906)。
【0083】
ST905で否定判定のときには、制御部16は、なす角度が135度以上225度未満か否かを判定し(ST907)、肯定判定の場合には、振動体403、404を同時に同時間、同じ振幅で駆動する(ST908)。
【0084】
ST907で否定判定のときには、制御部16は、なす角度が45度以上135度未満であるか否かを判定し(ST909)、肯定判定の場合には、振動体402、404を同時に同時間、同じ振幅で駆動する(ST910)。
【0085】
ST909で否定判定のときには、つまり、なす角度が225度以上315度未満の場合には、制御部16は、振動体401、403を同時に同時間、同じ振幅で駆動する(ST911)。
【0086】
このように本実施形態によれば、判定結果(なす角度)に基づいて、2個の振動体を同時に同時間、同じ振幅で振動させることができる(ST905〜ST911)。この結果、例えば振動体401、402を同時に同時間、同じ振幅で振動させた場合には、振動体401と、振動体402との中点C1の位置が振動したかのようにユーザに感じさせることができる。振動体403、404を同時に同時間、同じ振幅で振動させた場合には、振動体403と、振動体404との中点C2の位置が振動したかのようにユーザに感じさせることができる。同様に、振動体402、404を同時に同時間、同じ振幅で振動させた場合には、振動体402と、振動体404との中点C3の位置が振動したかのようにユーザに感じさせることができる。振動体401、403を同時に同時間、同じ振幅で振動させた場合には、振動体401と、振動体403との中点C4の位置が振動したかのようにユーザに感じさせることができる。
【0087】
以上のように、携帯端末装置400は、判定結果(なす角度)に基づき、中点C1〜中点C4のうちいずれかの位置が振動しているかのようにユーザに感じさせることができるので(ファントムセンセーション)、直感的な方位を提示することができる。
【0088】
また、第3の実施形態では、複数の振動体401〜404の振動の振幅が等しい例を示した。しかし、これに限定されず、例えば、制御部16が、判定結果(なす角度)に基づき、振動体401の振動の振幅の大きさに対する振動体402の振動の振幅の大きさの比率、又は振動体403の振動の振幅の大きさに対する振動体404の振動の振幅の大きさの比率、又は振動体402の振動の振幅の大きさに対する振動体404の振動の振幅の大きさの比率、振動体401の振動の振幅の大きさに対する振動体403の振動の振幅の大きさの比率を調整することができるようにするようにしてもよい。
【0089】
このような構成によれば、携帯端末装置400の周辺上の所望の位置が振動したようにユーザに感じさせることができる。この場合には、少ない4個の振動体401〜404で、目標位置への方位をユーザに細かく提示することができる。
【0090】
<第4の実施形態>
図10は、本技術の第4の実施形態に係る携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。なお、本実施形態では、上記実施形態に比べて、複数の振動体の配設位置及び振動体の制御が異なるので、同一の構成要素等には同一の符号を付しその説明を省略し、異なる箇所を中心に説明する。
【0091】
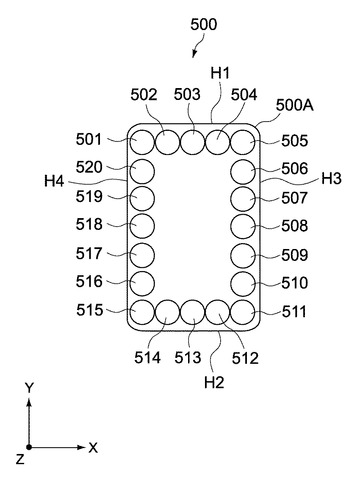
第4の実施形態では、携帯端末装置500は、複数の振動体501、502、503、504、505、506、507、508、509、510、511、512、513、514、515、516、517、518、519、520を備えている。複数の振動体501〜520は、携帯端末装置500の筐体500Aに内蔵されており、それぞれ筐体500Aの周縁部に沿って1周するように配設されている。
【0092】
具体的には、携帯端末装置500のX方向に平行な一辺H1に沿って5個の振動体501〜505が隣接して配設されている。携帯端末装置500のX方向に平行な一辺H2に沿って5個の振動体511〜515が隣接して配設されている。携帯端末装置500のY方向に平行な一辺H3に沿って7個の振動体505〜511が隣接して配設されている。携帯端末装置500のY方向に平行な一辺H4に沿って7個の振動体515〜520、501が隣接して配設されている。
【0093】
携帯端末装置500の制御部16は、位置取得部11の出力信号S1、方位取得部12の出力信号S3及び目標位置取得部13の出力信号S4に基づいて、携帯端末装置500の方位を基準として携帯端末装置500から目標位置への方位を判定し、この判定結果(なす角度)に基づき、複数の振動体501〜505を所定の順に所定の時間間隔で振動させるための駆動信号を生成し複数の振動体501〜505に出力、又は複数の振動体511〜515を所定の順に所定の時間間隔で振動させるための駆動信号を生成し複数の振動体511〜515に出力、又は複数の振動体505〜511を所定の順に所定の時間間隔で振動させるための駆動信号を生成し複数の振動体505〜511に出力、又は複数の振動体501、520〜515を所定の順に所定の時間間隔で振動させるための駆動信号を生成し複数の振動体501、520〜515に出力することが可能に構成されている。
【0094】
図11は、図10に示す携帯端末装置の一動作例を説明するフローチャートである。
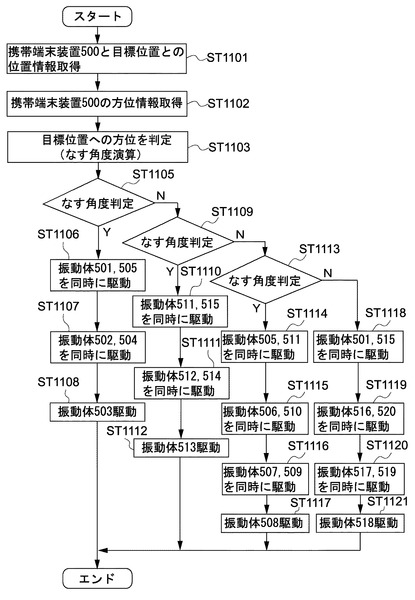
本動作例では、図11に示すST1101〜ST1103は、図4に示すST401〜ST403と(なす角度を演算するまで)同様であるので、その説明を省略し、ST1105以降について説明する。
【0095】
第4の実施形態の制御部16は、この判定結果(なす角度)が0度以上45度未満又は315度以上360度未満であるか否かを判定し(ST1105)、肯定判定の場合には、振動体501、505を同時に同時間、同じ振幅で駆動する(ST1106)。続いて、振動体502、504を同時に同時間、同じ振幅で駆動する(ST1107)。そして、振動体503を駆動体504と同じ駆動時間、同じ振幅で駆動する(ST1108)。
【0096】
このように、ST1105で肯定判定の場合には、ST1106により振動体503の位置が振動したかのようにユーザに感じさせることができ、ST1107によっても同じ振動体503の位置が振動したかのようにユーザに感じさせることができ、ST1108によって振動体503の位置を振動させることができる。
【0097】
一方、ST1105で否定判定のときには、制御部16は、なす角度が135度以上225度未満か否かを判定し(ST1109)、肯定判定の場合には、振動体511、515を同時に同時間、同じ振幅で駆動する(ST1110)。続いて、振動体512、514を同時に同時間、同じ振幅で駆動する(ST1111)。そして、振動体513を駆動体514と同じ駆動時間、同じ振幅で駆動する(ST1112)。
【0098】
このように、ST1109で肯定判定の場合には、ST1110により振動体513の位置が振動したかのようにユーザに感じさせることができ、ST1111によっても同じ振動体513の位置が振動したかのようにユーザに感じさせることができ、ST1112によって振動体513の位置を振動させることができる。
【0099】
ST1109で否定判定のときには、制御部16は、なす角度が45度以上135度未満であるか否かを判定し(ST1113)、肯定判定の場合には、振動体505、511を同時に同時間、同じ振幅で駆動する(ST1114)。続いて、振動体506、510を同時に同時間、同じ振幅で駆動する(ST1115)。続いて、振動体507、509を同時に同時間、同じ振幅で駆動する(ST1116)。そして、振動体508を振動体507と同じ駆動時間、同じ振幅で駆動する(ST1117)。
【0100】
このように、ST1113で肯定判定の場合には、ST1114により振動体508の位置が振動したかのようにユーザに感じさせることができ、ST1115によっても同じ振動体508の位置が振動したかのようにユーザに感じさせることができ、ST1116によっても振動体508の位置が振動したかのようにユーザに感じさせることができ、ST1117によって振動体508を振動させることができる。
【0101】
ST1113で否定判定のときには、つまり、なす角度が225度以上315度未満の場合には、制御部16は、振動体501、515を同時に同時間、同じ振幅で駆動する(ST1118)。続いて、振動体516、520を同時に同時間、同じ振幅で駆動する(ST1119)。続いて、振動体517、519を同時に同時間、同じ振幅で駆動する(ST1120)。そして、振動体518を振動体517と同じ駆動時間、同じ振幅で駆動する(ST1121)。
【0102】
このように、ST1113で否定判定の場合には、ST1118により振動体518の位置が振動したかのようにユーザに感じさせることができ、ST1119によっても同じ振動体518の位置が振動したかのようにユーザに感じさせることができ、ST1120によっても振動体518の位置が振動したかのようにユーザに感じさせることができ、ST1121によって振動体518を振動させることができる。
【0103】
このように本実施形態によれば、制御部16の判定結果(なす角度)に応じて、振動体503、振動体513、振動体508、又は振動体518が振動したようにユーザに感じさせることができる。
【0104】
また、本実施形態によれば、携帯端末装置500の周縁部に沿うように1周にわたって複数の振動体501〜520が内蔵されている。このため、ユーザの携帯端末装置500の持ち方や持つ位置に依存することなく、ユーザに目標位置への方位を確実に提示することができる。
【0105】
また、本実施形態では、複数の振動体を同時に振動させる例を示した。しかし、図10に示すように配設された複数の振動体501〜520の駆動制御の方法を変更するようにしてもよい。具体的には、Y方向プラス向きをユーザに提示するときには、制御部が振動体511、510、509・・・505をこの順に所定の時間間隔で駆動するようにしてもよい。X方向プラス向きをユーザに提示するときには、制御部が振動体515〜511をこの順に所定の時間間隔で駆動するようにしてもよい。このような制御によっても、直感的にユーザに方位を提示することができる。
【0106】
以上、本技術の実施形態について説明したが、本技術は上述の実施形態にのみ限定されるものではなく、本技術の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【0107】
上記各実施形態では、例えばユーザにより予めキー入力部14から地図上の特定の目標位置が設定されている例を示した。しかし、例えばユーザがGPS機能を備えた別の携帯端末装置を目標として設定する場合にも適用可能である。この場合、位置取得部11は、ユーザによりキー入力部14から設定された目標の携帯端末装置の位置情報を取得し、位置情報に応じた出力信号を制御部16に出力する。この出力信号には、ユーザにより設定された目標の携帯端末装置の位置を示す経度、緯度等の位置情報が含まれている。また、制御部16は、携帯端末装置1の方位を基準として携帯端末装置1の位置から目標の携帯端末装置の位置への方位を判定し、判定結果に基づき振動部19の振動を制御するための駆動信号S5を生成する。具体的には、この判定は、携帯端末装置1の方位と、携帯端末装置1の位置から目標の携帯端末装置の位置への方位とのなす角度を判定する。この動作例では、携帯端末装置1は、この判定結果に基づき所定の振動体を駆動し、ユーザに対して目標の携帯端末装置の方位を直感的に提示することができる。
【0108】
上記各実施形態では、特定の個数の振動体を用いる例を示したが、個数は特に限定されない。例えば振動体を3個用いてもよいし、5個用いてもよい。これらの場合にも、同様に目標位置への方位(なす角度)を判定し、複数の振動体の少なくとも1個を駆動することで、方位を提示することができる。また、複数の振動体を順に所定の時間間隔で駆動することで、手の異なる位置に連続的に振動を与え、方位を提示することができる。
【0109】
上記第1の実施形態では、図3に示す振動体101〜104のうち1個を駆動する例を示した。しかし、目標位置のへ方位を提示するために、振動体101と振動体102とを同時に振動させたり、振動体101と振動体103とを同時に振動させたり、振動体102と振動体104とを同時に振動させたり、振動体103と振動体104とを同時に振動させたりするようにしてもよい。これにより、より細かい方位をユーザに直感的に提示することができる。
【0110】
第2の実施の形態では、筐体200A内に十字状に複数の振動体201〜211が内蔵されている例を示した。複数の振動体201〜211の個数、配設位置等はこれに限定されず、適宜変更可能である。
【0111】
第4の実施形態では、図10に示すように複数の振動体がX方向に5個、Y方向に7個配設されている例を示したが、複数の振動体の配設された個数はこれらに限定されない。
【0112】
なお、本技術は以下のような構成も採ることができる。
(1)筐体と、
前記筐体の内部に設けられた複数の振動体と、
前記筐体の位置から目標位置への方位を判定し、判定結果に基づいて前記複数の振動体のうち少なくとも1つの振動体を駆動することで、前記方位を提示する振動を前記筐体に発生させるように構成された制御部と
を具備する携帯端末装置。
(2)上記(1)に記載の携帯端末装置であって、
前記制御部は、前記判定結果に基づいて、前記複数の振動体のうち所定の複数の振動体を順に所定の時間間隔で振動させる携帯端末装置。
(3)上記(1)又は(2)に記載の携帯端末装置であって、
前記筐体は、前記筐体の長手方向に平行な2辺と前記長手方向に直交する2辺とを有する直方体形状を有し、
前記複数の振動体は、前記4辺の各中央位置に対応するように配設されている
携帯端末装置。
(4)上記(1)〜(3)の何れか1つに記載の携帯端末装置であって、
前記筐体は、前記筐体の長手方向に平行な第1の方向及び前記第1の方向に直交する第2の方向を有する直方体形状を有し、
前記複数の振動体は、前記筐体の中心に交点が位置するように前記第1の方向及び前記第2の方向にそれぞれ複数配設されている
携帯端末装置。
(5)上記(1)〜(4)の何れか1つに記載の携帯端末装置であって、
前記制御部は、前記判定結果に基づいて、前記複数の振動体のうち少なくとも2個の振動体を同時に振動させる携帯端末装置。
(6)上記(1)〜(5)の何れか1つに記載の携帯端末装置であって、
前記筐体は、直方体形状を有し、
前記複数の振動体は、前記筐体の4つの角に対応するように配設されている
携帯端末装置。
(7)上記(1)〜(6)の何れか1つに記載の携帯端末装置であって、
前記筐体は、直方体形状を有し、
前記複数の振動体は、前記筐体の周縁に沿うように配設されている
携帯端末装置。
(8)上記(1)〜(7)の何れか1つに記載の携帯端末装置であって、
前記複数の振動体は、隣接するように配設されており、
前記制御部は、前記判定結果に基づいて、前記複数の振動体のうち隣り合う振動体を順に所定の時間間隔で振動させる携帯端末装置。
(9)上記(1)〜(8)の何れか1つに記載の携帯端末装置であって、
前記筐体の位置の情報である第1の位置情報を取得し出力する第1の位置情報取得ユニットと、
前記目標位置の位置の情報である第2の位置情報を取得し出力する第2の位置情報取得ユニットと、
前記筐体の方位の情報である方位情報を取得し出力する方位情報取得ユニットと
を更に具備し、
前記制御部は、前記第1の位置情報、前記方位情報及び前記第2の位置情報に基づき、前記筐体の位置から目標位置への方位を判定する
携帯端末装置。
(10)上記(1)〜(9)の何れか1つに記載の携帯端末装置であって、
前記複数の振動体は、振動の波形が正弦波である携帯端末装置。
(11)筐体の位置の情報である第1の位置情報を取得し、
目標位置の位置の情報である第2の位置情報を取得し、
前記筐体の方位の情報である方位情報を取得し、
前記第1の位置情報、前記方位情報及び前記第2の位置情報に基づき、前記筐体の位置から前記目標位置への方位を判定し、
判定結果に基づいて、前記複数の振動体のうち少なくとも1つの振動体を駆動することで、前記方位を提示する振動を前記筐体に発生させる
方位提示方法。
【符号の説明】
【0113】
1,200,400,500…携帯端末装置
10,200A,410,500A…筐体
101〜104,201〜211,401〜404,501〜520…振動体
16…制御部
X…X方向
Y…Y方向
11…位置取得部(第1の位置情報取得ユニット,第2の位置情報取得ユニット)
12…方位取得部(方位情報取得ユニット)
13…目標位置取得部(第2の位置情報取得ユニット)
【技術分野】
【0001】
本技術は、ユーザに目標位置への方位を提示する携帯端末装置及び方位提示方法に関する。
【背景技術】
【0002】
従来、ユーザに対して目標物への方位を提示することが可能な携帯機器が知られている。例えば、携帯機器の画面の法線方向と目標物の方向とのなす角度に応じて、携帯機器の画面に目標物への方向を矢印で表示したり、バイブレータを振動させたりする技術が知られている(特許文献1 段落0047,0054参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−168647号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した技術では、ユーザに対して方位を提示するために、主に携帯機器の画面に矢印等の視覚情報が用いられる。このため、ユーザは目標物への移動の際に携帯機器の画面を見る必要がある。また、バイブレータが用いられているもののユーザに対して振動により直感的に目標物への方位を知らせることができる携帯機器は知られていない。
【0005】
以上のような事情に鑑み、本技術の目的は、ユーザに目標位置への方位を直感的に提示可能な携帯端末装置及び方位提示方法を提供することにある。
【課題を解決するための手段】
【0006】
本技術の一形態に係る携帯端末装置は、筐体と、複数の振動体と、制御部とを具備する。上記複数の振動体は、上記筐体の内部に設けられている。上記制御部は、上記筐体の位置から目標位置への方位を判定し、判定結果に基づいて上記複数の振動体のうち少なくとも1つの振動体を駆動することで、上記方位を提示する振動を上記筐体に発生させるように構成されている。
【0007】
上記携帯端末装置によれば、上記制御部は、上記筐体の位置から目標位置への方位を判定し、判定結果に基づいて上記複数の振動体のうち少なくとも1つの振動体を駆動することで、上記方位を提示する振動を上記筐体に発生させて、目標位置への方位をユーザに直感的に提示することができる。
【0008】
なお、振動体としては、一軸方向に振動を発生させるボイスコイルモータ、回転する偏心錘の遠心力を利用して多軸方向に振動を発生させる振動モータ等が挙げられる。振動の強さ(振幅)、振動周期(周波数)、振動方向等、ユーザが区別し得る態様で変更が可能である。
【0009】
上記制御部は、上記判定結果に基づいて、上記複数の振動体のうち所定の複数の振動体を順に所定の時間間隔で振動させるようにしてもよい。ここで、所定の時間間隔とは、例えば4ms以上10ms以下である。これにより、目標への方位に沿ってなぞるような触感や目標の方位へ向かって手を飛び越えるような触感をユーザに与えることができる。
【0010】
上記筐体は、上記筐体の長手方向に平行な2辺と上記長手方向に直交する2辺とを有する直方体形状を有し、上記複数の振動体は、上記4辺の各中央位置に対応するように配設されているようにしてもよい。
【0011】
これにより、直交する2方向の各向きに向かう方位を直感的にユーザに提示することができる。
【0012】
上記筐体は、上記筐体の長手方向に平行な第1の方向及び上記第1の方向に直交する第2の方向を有する直方体形状を有し、上記複数の振動体は、上記筐体の中心に交点が位置するように上記第1の方向及び上記第2の方向にそれぞれ複数配設されているようにしてもよい。
【0013】
これにより、筐体の長手方向や長手方向に直交する方向に手をなぞるような感覚をユーザに提示して、直感的に方向をユーザに提示することができる。
【0014】
上記制御部は、上記判定結果に基づいて、上記複数の振動体のうち少なくとも2個の振動体を同時に振動させるようにしてもよい。
【0015】
これにより、同時に振動した2個の振動体の中央の位置が振動したかのようにユーザに感じさせて、直感的に方位を提示することができる。
【0016】
上記筐体は、直方体形状を有し、上記複数の振動体は、上記筐体の4つの角に対応するように配設されているようにしてもよい。
【0017】
これにより、2個の角に対応するように配設された2個の振動体を振動させることで、2個の角の間の中間の位置が振動したかのようにユーザに感じさせて、ユーザに直感的に方位を提示することができる。
【0018】
上記筐体は、直方体形状を有し、上記複数の振動体は、上記筐体の周縁に沿うように配設されているようにしてもよい。
【0019】
これにより、筐体の周縁に沿って配設された複数の振動体を同時に振動させることで、ユーザにより確実に方位を提示することができる。
【0020】
上記複数の振動体は、隣接するように配設されており、上記制御部は、上記判定結果に基づいて、上記複数の振動体のうち隣り合う振動体を順に所定の時間間隔で振動させるようにしてもよい。
【0021】
これにより、手をなぞるような触感をより確実にユーザに与えることができる。
【0022】
上記複数の振動体は、振動の波形が例えば正弦波であるようにしてもよい。これにより、触覚だけでなく力覚をユーザに提示することで、方位をユーザにより分かり易く提示することができる。
【0023】
上記携帯端末装置は、上記筐体の位置の情報である第1の位置情報を取得し出力する第1の位置情報取得ユニットと、上記目標位置の位置の情報である第2の位置情報を取得し出力する第2の位置情報取得ユニットと、上記筐体の方位の情報である方位情報を取得し出力する方位情報取得ユニットとを更に具備してもよい。この場合、上記制御部は、上記第1の位置情報、上記方位情報及び上記第2の位置情報に基づき、上記筐体の位置から目標位置への方位を判定する。
【0024】
これにより、筐体の位置の情報、筐体の方位の情報及び目標位置の位置の情報に基づき、筐体の位置から目標位置への方位を判定することができる。
【0025】
本技術の一形態に係る方位提示方法は、筐体の位置の情報である第1の位置情報を取得することを含む。
目標位置の位置の情報である第2の位置情報が取得される。
上記筐体の方位の情報である方位情報が取得される。
上記第1の位置情報、上記方位情報及び上記第2の位置情報に基づき、上記筐体の位置から上記目標位置への方位が判定される。
判定結果に基づいて、上記複数の振動体のうち少なくとも1つの振動体を駆動することで、上記方位を提示する振動が上記筐体に発生させられる。
【発明の効果】
【0026】
以上のように本技術によれば、ユーザに目標位置への方位を直感的に提示することができる。
【図面の簡単な説明】
【0027】
【図1】本技術の一実施形態に係る携帯端末装置を示す平面図である。
【図2】図1に示す携帯端末装置の内部構造を示すブロック図である。
【図3】図1に示す携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。
【図4】上記携帯端末装置の一動作例を説明するフローチャートである。
【図5】上記携帯端末装置の他の動作例を説明するフローチャートである。
【図6】本技術の第2の実施形態に係る携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。
【図7】図6に示す携帯端末装置の一動作例を説明するフローチャートである。
【図8】本技術の第3の実施形態に係る携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。
【図9】図8に示す携帯端末装置の一動作例を説明するフローチャートである。
【図10】本技術の第4の実施形態に係る携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。
【図11】図10に示す携帯端末装置の一動作例を説明するフローチャートである。
【発明を実施するための形態】
【0028】
以下、本技術に係る実施形態を、図面を参照しながら説明する。
<第1の実施形態>
図1は、本技術の一実施形態に係る携帯端末装置を示す平面図であり、図2は、図1に示す携帯端末装置の内部構造を示すブロック図である。なお、図中X方向は携帯端末装置の長手方向に直交する方向、Y方向は携帯端末装置の長手方向、Z方向はX軸及びY軸に直交する方向を示している。
【0029】
携帯端末装置1は、筐体10と、位置取得部11と、方位取得部12と、目標位置取得部13と、キー入力部14と、情報表示部15と、制御部16と、通信部17と、電源部18と、振動部19とを有する。
【0030】
筐体10は、例えば略直方体形状であり、ユーザが把持できる大きさを有し、筐体10の一方の表面側には複数のキー入力部14や情報表示部15が配置されている。
【0031】
位置取得部11は、携帯端末装置1の位置情報を取得し、位置情報に応じた出力信号S1を制御部16に出力する。具体的には、位置取得部11は、GPSモジュールが用いられる。出力信号S1には、携帯端末装置1の位置を示す緯度、経度等の位置情報が含まれている。
【0032】
方位取得部12は、携帯端末装置1の方位情報を取得し、方位情報に応じた出力信号S3を制御部16に出力する。具体的には、方位取得部12は、地磁気センサを用いることができる。出力信号S3には、携帯端末装置1の方位の情報が含まれている。
【0033】
目標位置取得部13は、ユーザによりキー入力部14から設定された地図上の特定の目標位置の位置を示す経度、緯度等の位置情報を取得(記憶)可能であり、制御部16からの指令に基づき出力信号S4を制御部16に出力する。出力信号S4には、ユーザにより設定された地図上の特定の目標位置の位置を示す経度、緯度等の位置情報が含まれている。
【0034】
キー入力部14は、筐体10の表面に適宜配置された押圧式のキーを含む。なお、キー入力部14は、機械式のキーに限られず、スライド式、静電式、光学式の操作部を含んでもよい。キー入力部14の出力信号には、キー操作等の各種操作に関する情報が含まれる。
【0035】
情報表示部15は、筐体10の表面に所望の大きさで組み込まれたディスプレイで構成される。
【0036】
制御部16は、ROM、RAM、CPU(MPU)を含み、携帯端末装置1の各部へ電源を供給するとともに携帯端末装置1の動作を制御する。制御部16は、位置取得部11の出力信号S1、方位取得部12の出力信号S3及び目標位置取得部13の出力信号S4に基づいて、携帯端末装置1の方位を基準として携帯端末装置1の位置から目標位置への方位を判定し、判定結果に基づき振動部19の振動を制御するための駆動信号S5を生成する。具体的には、この判定は、携帯端末装置1の方位と、携帯端末装置1の位置から目標位置への方位とのなす角度を判定する。
【0037】
制御部16のROMには、例えば予め地図等のデータなどが記憶されている。
【0038】
通信部17は、図示しないデータサーバとの間で各種データを通信可能とする無線通信モジュールで構成されるが、有線通信でもよい。通信方式は特に制限されず、「Bluetooth」(登録商標)などの機器間通信でもよいし、インターネットを経由した通信でもよい。通信部17は、制御部16と信号S6を送受信する。
【0039】
電源部18は、携帯端末装置1の電源を構成し、筐体10内部の各部へ必要な電力を供給する。電源部18は、典型的にはバッテリで構成される。バッテリは一次電池でもよいし、二次電池でもよい。また電源部18は、太陽電池で構成されてもよい。なお、有線やワイヤレス給電の場合、電源部18は不要である。
【0040】
振動部19は、制御部16からの駆動信号S5に基づき振動が制御される。
図3は、図1に示す携帯端末装置1に内蔵された振動部19の複数の振動体の配設位置を示す図である。
【0041】
振動部19は、複数の振動体101、102、103、104を備えている。複数の振動体101〜104は、筐体10の端部近くで筐体10に内蔵されている。複数の振動体101〜104は、筐体10の4辺10A、10B、10C、10Dの各中央位置に対応するように配設されている。4個の振動体101〜104は、同一平面(XY平面)内に配設されている。具体的には、複数の振動体101〜104は、例えばボイスコイルモータで構成される。振動体101、104は、例えばそれぞれボイスコイルモータの可動軸がY軸に平行となるように配設されている。振動体102、103は、例えばそれぞれボイスコイルモータの可動軸がX軸に平行となるように配設されている。ボイスコイルモータは、その振動の波形が例えば正弦波となるように構成されている。
【0042】
なお、これら複数の振動体101〜104の配設位置については、図3に示す位置に限定されず、例えば筐体10に内蔵されている他の部品の配設位置に応じて適宜変更可能である。
【0043】
(携帯端末装置1の動作例)
次に、携帯端末装置1の動作例を説明する。
【0044】
図4は、携帯端末装置1の一動作例を説明するフローチャートである。本動作例では、ユーザにより予めキー入力部14から地図上の特定の目標位置が設定されているものとする。つまり、目標位置取得部13に地図上の特定の目標位置の位置情報が記憶されているものとする。
【0045】
携帯端末装置1の制御部16は、位置取得部11からの出力信号S1と目標位置取得部13からの出力信号S4を取得し(ST401)。これにより、制御部16は、携帯端末装置1の位置情報と、地図上の特定の目標位置の位置情報とを取得する。
【0046】
制御部16は、方位取得部12からの出力信号S3を取得する(ST402)。これにより、制御部16は、携帯端末装置1の方位の情報を取得する。
【0047】
制御部16は、ST401で取得した携帯端末装置1の位置情報と、地図上の特定の目標位置の位置情報と、ST402で取得した携帯端末装置1の方位の情報とに基づき、携帯端末装置1の方位を基準とした携帯端末装置1から特定の目標位置への方位を判定する(ST403)。具体的には、携帯端末装置1の方位と、携帯端末装置1から特定の目標位置への方位とのなす角度を演算する。このなす角度の定義については、適宜設定可能であるが、本実施形態では、例えば携帯端末装置1のY方向プラス方位を基準(0度)として、時計回りに増加するものとする。
【0048】
次いで、制御部16は、この判定結果(なす角度)が0度以上45度未満又は315度以上360度未満であるか否かを判定し(ST405)、肯定判定の場合には、振動体101を駆動するための駆動信号S5を振動体101に出力し駆動体101を駆動する(ST406)。
【0049】
ST405で否定判定のときには、制御部16は、なす角度が135度以上225度未満か否かを判定し(ST407)、肯定判定の場合には、振動体104を駆動するための駆動信号S5を振動体104に出力し、振動体104を駆動する(ST408)。
【0050】
ST407で否定判定のときには、制御部16は、なす角度が45度以上135度未満であるか否かを判定し(ST409)、肯定判定の場合には、振動体103を駆動するための駆動信号S5を振動体103に出力し、振動体103を駆動する(ST410)。
【0051】
ST409で否定判定のときには、つまり、なす角度が225度以上315度未満の場合には、制御部16は、振動体102に駆動信号S5を出力し、振動体102を駆動する(ST411)。
【0052】
このように本実施形態によれば、携帯端末装置1の制御部16は、携帯端末装置1の方位(Y方向プラス方位)を基準として携帯端末装置1の位置から特定の目標位置への方位を判定し(ST403)、判定結果に基づいて複数の振動体101〜104のうちいずれか1つを駆動する(ST405〜ST411)。これにより、目標位置への方位を提示する振動を筐体10に発生させて、目標位置への方位をユーザに直感的に提示することができる。このとき、複数の振動体101〜104が筐体10の内部で筐体10の端部近くに設けられているため、筐体10の中央を基準位置とした目標位置への方位をユーザに直感的に提示することができる。
【0053】
本実施形態では、複数の振動体101〜104は、筐体10の4辺10A、10B、10C、10Dの各中央位置に対応するように配設されている。このため、複数の振動体101〜104の振動をユーザが明確に区別することができる。このように、少ない振動体101〜104で明確かつ直感的にユーザに方位を提示することができる。
【0054】
振動体101、104は、それぞれボイスコイルモータの可動軸がY軸に平行となるように配設されており、振動体102、103は、それぞれボイスコイルモータの可動軸がX軸に平行となるように配設されている。また、振動体101〜104は、その振動の波形が例えば正弦波となるように構成されている。このため、振動体の振動方向と提示される方向とを同じにして触感だけでない力覚をユーザに提示することができる。
【0055】
次に、携帯端末装置1の別の動作例を説明する。
図5は、携帯端末装置1の他の動作例を説明するフローチャートである。
【0056】
本動作例では、図5に示すST501〜ST503は、図4に示すST401〜ST403と同様であるので、その説明を省略し、ST505以降について説明する。
【0057】
制御部16は、なす角度が0度以上45度未満又は315度以上360度未満であるか否かを判定し(ST505)、肯定判定の場合には、振動体104、101をこの順に予め定められた所定の時間間隔で駆動する(ST506)。この所定の時間間隔とは、例えば4ms以上10ms以下とすることができる(以下、他の所定の時間間隔についても、同様に、例えば4ms以上10ms以下とする。)。これにより、ユーザに確実に異なる2刺激であるという感触を与えることができる。このとき、制御部16は、振動体104の振動の大きさより振動体101の振動の大きさが大きくなるように振動体104、101の振動を制御する。
【0058】
ステップ505で否定判定のときには、制御部16は、なす角度が135度以上225度未満か否かを判定し(ST507)、肯定判定の場合には、振動体101、104をこの順に所定の時間間隔で駆動する(ST508)。このとき、制御部16は、振動体101の振動の大きさより振動体104の振動の大きさが大きくなるように振動体101、104の振動を制御する。
【0059】
ステップ507で否定判定のときには、制御部16は、なす角度が45度以上135度未満であるか否かを判定し(ST509)、肯定判定の場合には、振動体102、103をこの順に所定の時間間隔で駆動する(ST510)。このとき、制御部16は、振動体102の振動の大きさより振動体103の振動の大きさが大きくなるように振動体102、103の振動を制御する。
【0060】
ステップ509で否定判定のときには、つまり、なす角度が225度以上315度未満の場合には、振動体103、102をこの順に所定の時間間隔で駆動する(ST511)。このとき、制御部16は、振動体103の振動の大きさより振動体102の振動の大きさが大きくなるように振動体103、102の振動を制御する。
【0061】
このように本動作例によれば、複数の振動体を所定の順に所定の時間間隔で駆動させることができるので、最初に駆動する振動体から後に駆動する振動体への方位をユーザに直感的に提示することができる。このとき、最初の振動体の振動の大きさより後の振動体の振動の大きさが大きいので、ユーザに明確に方位を提示することができる。
【0062】
また、例えば振動体101と、振動体104とは、筐体10のY方向に大きく離間して設けられているので、制御部16が、振動体104、101を順に振動させた場合に、手を振動が飛び越えていくような感覚をユーザに与えることができ、直感的に方位を提示することができる。
【0063】
本実施形態では、地図上の特定の目標位置への直感的な方位提示について説明したが、制御部16がROMに記憶されている地図情報に基づいて目標位置への方位提示(ルート提示、ルートガイド)をする機能を備えるようにしてもよい。この機能は、例えばユーザが目標位置を設定し携帯端末装置1の情報表示部15に表示された地図を見ながら目的位置に向かう場合に有効に利用可能である。具体的には、携帯端末装置1は、ユーザによる目標位置の入力に対して、地図と、現在位置から目標位置への最短ルートとを情報表示部15に表示すると共に、ユーザがこの最短ルートを通過できるようにするために最短ルートへ向かう方位を示す振動体の振動を発生させる。例えば、携帯端末装置1は、地図情報に基づき、現在位置から目標位置へ直線的に向かう道路がないと判断した場合には、最短ルートを検索し、現在位置から目標位置への方位とは違う最短ルートへ向かう方位を提示する。これにより、ユーザは、地図からの視覚的情報を取得しつつ振動による直感的な提示を受けて、より確実かつ短時間で目標位置へ到達することができる。
【0064】
この場合、携帯端末装置1が、ユーザの目標位置の入力に対して、ユーザの選択可能な複数のルートを提示するようにしてもよい。このようにすることで、ユーザビリティーを向上させることができる。また、この方位提示を行うアプリケーションは、起動後終了迄、方位提示のために継続的に振動体の振動を発生させるモードと、起動後、携帯端末装置1の現在位置が地図上の交差点等から所定の距離以内になっているときに振動体の振動を発生させるモードとを有するようにしてもよい。このようにすることで、振動体の振動の時間を抑制して省電力化を図ることができる。なお、このルート提示機能及びルートガイド機能については、後述する実施形態に本実施形態と同様に付加してもよい。
【0065】
<第2の実施形態>
図6は、本技術の第2の実施形態に係る携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。なお、本実施形態では、上記実施形態に比べて、複数の振動体の配設位置及び複数の振動体の制御が異なるので、同一の構成要素等には同一の符号を付しその説明を省略し、異なる箇所を中心に説明する。
【0066】
本実施形態の携帯端末装置200は、上記実施形態の複数の振動体101〜104に代えて、複数の振動体201、202、203、204、205、206、207、208、209、210、211を備えている。複数の振動体201〜211は、筐体200Aの中心に交点が位置するように十字状に配設されている。つまり、複数の振動体201〜207は、Y方向に平行にかつY方向プラス向きにこの順に互いに隣接するように配設されている。複数の振動体208、209、204、210、211は、X方向に平行にかつX方向プラス向きにこの順に互いに隣接するように配設されている。振動体204は、十字の交点に対応した位置には配置されている。振動体201、207、208、211は、それぞれ筐体200Aの端部付近に配設されている。複数の振動体201〜211は、XY平面内に含まれるように設けられている。なお、複数の振動体201〜211の配設位置は、筐体200Aに内蔵されている他の部品等の位置に応じて適宜変更可能である。
【0067】
第2の実施形態の制御部は、位置取得部11の出力信号S1、方位取得部12の出力信号S3及び目標位置取得部13の出力信号S4に基づいて、携帯端末装置200の方位を基準として携帯端末装置200から目標位置への方位(なす角度)を判定し、この判定結果(なす角度)に基づき、複数の振動体201〜207を所定の順に所定の時間間隔で振動させるための駆動信号を生成、又は複数の振動体208、209、204、210、211を所定の順に所定の時間間隔で振動させるための駆動信号を生成し、複数の振動体201〜207又は複数の振動体208、209、204、210、211に出力することが可能に構成されている。
【0068】
図7は、図6に示す携帯端末装置200の一動作例を説明するフローチャートである。
【0069】
本動作例では、図7に示すST701〜ST703は、図4に示すST401〜ST403(なす角度を演算するまで)と同様であるので、その説明を省略し、ST705以降について説明する。
【0070】
第2の実施形態の制御部16は、この制御部16による判定結果(なす角度)が0度以上45度未満又は315度以上360度未満であるか否かを判定し(ST705)、肯定判定の場合には、振動体201、202、203、204、205、206、207をこの順に所定の時間間隔で駆動する(ST706)。
【0071】
ST705で否定判定のときには、制御部16は、なす角度が135度以上225度未満か否かを判定し(ST707)、肯定判定の場合には、振動体207、206、205、204、203、202、201をこの順に所定の時間間隔で駆動する(ST708)。
【0072】
ST707で否定判定のときには、制御部16は、なす角度が45度以上135度未満であるか否かを判定し(ST709)、肯定判定の場合には、振動体208、209、204、210、211をこの順に所定の時間間隔で駆動する(ST710)。
【0073】
ST709で否定判定のときには、つまり、なす角度が225度以上315度未満の場合には、制御部16は、振動体211、210、204、209、208をこの順に所定の時間間隔で駆動する(ST711)。
【0074】
このように本実施形態によれば、Y方向に隣り合うように配設された複数の振動体201〜207をこの順又は逆順に所定の時間間隔(例えば4ms以上10ms以下)で振動させたり、又は、X方向に隣り合うように配設された複数の振動体208、209、204、210、211をこの順又は逆順に所定の時間間隔(例えば4ms以上10ms以下)で振動させたりすることができる。この結果、手のひらの異なる箇所を順になぞられるような触感をユーザに与えて、ユーザに直感的に方位を提示することができる。
【0075】
このとき、刺激変数として、刺激をユーザに提示する時間である刺激の提示時間、提示時間間隔、刺激間距離等を適宜調整することが好ましい。特に重要な刺激変数は、刺激の提示時間、提示時間間隔であることが知られているので、これらを調整することがより好ましい。
【0076】
具体的には、複数の振動体201〜207をこの順に所定の時間間隔で駆動する場合に、振動体201と振動体207との振動の振幅を振動体202〜206の振動の振幅より大きくすることで、手をなぞるような感覚に加えて手を振動が飛び越えるような感覚をユーザに与えることで、より直感的に方位を提示することができる。また、制御部16が、複数の振動体201〜207を順に、徐々に振動の振幅が大きくなるように制御したり、又は徐々に振動時間が長くなるように制御したりするように制御してもよい。
【0077】
<第3の実施形態>
図8は、本技術の第3の実施形態に係る携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。なお、本実施形態では、上記実施形態に比べて、複数の振動体の配設位置及び振動体の制御が異なるので、同一の構成要素等には同一の符号を付しその説明を省略し、異なる箇所を中心に説明する。
【0078】
本実施形態の携帯端末装置400は、上記第1の実施形態の複数の振動体101〜104に代えて、複数の振動体401、402、403、404を備えている。複数の振動体401〜404は、携帯端末装置400の筐体410の4つの角に近接して筐体410に内蔵されている。複数の振動体401〜404は、XY平面内に含まれるように設けられている。なお、複数の振動体401〜404の配設位置は、図8に示す位置に限定されず、例えば筐体410に内蔵されている他の部品の配設位置に応じて適宜変更可能である。
【0079】
第3の実施形態の制御部16は、位置取得部11の出力信号S1、方位取得部12の出力信号S3及び目標位置取得部13の出力信号S4に基づいて、携帯端末装置400の方位を基準として携帯端末装置400から目標位置への方位を判定する。制御部16は、この判定結果(なす角度)に基づき、複数の振動体401〜404のうち所定の2個の振動体を同時に振動させるための駆動信号を生成し、この所定の2個の振動体に出力することが可能に構成されている。次に、具体的な制御について説明する。
【0080】
図9は、図8に示す携帯端末装置400の一動作例を説明するフローチャートである。
【0081】
本動作例は、図9に示すST901〜ST903は、図4に示すST401〜ST403(なす角度を演算するまで)と同様であるので、その説明を省略し、ST905以降について説明する。
【0082】
第3の実施形態の制御部16は、この制御部16による判定結果(なす角度)が0度以上45度未満又は315度以上360度未満であるか否かを判定し(ST905)、肯定判定の場合には、振動体401、402を同時に同時間、同じ振幅で駆動する(ST906)。
【0083】
ST905で否定判定のときには、制御部16は、なす角度が135度以上225度未満か否かを判定し(ST907)、肯定判定の場合には、振動体403、404を同時に同時間、同じ振幅で駆動する(ST908)。
【0084】
ST907で否定判定のときには、制御部16は、なす角度が45度以上135度未満であるか否かを判定し(ST909)、肯定判定の場合には、振動体402、404を同時に同時間、同じ振幅で駆動する(ST910)。
【0085】
ST909で否定判定のときには、つまり、なす角度が225度以上315度未満の場合には、制御部16は、振動体401、403を同時に同時間、同じ振幅で駆動する(ST911)。
【0086】
このように本実施形態によれば、判定結果(なす角度)に基づいて、2個の振動体を同時に同時間、同じ振幅で振動させることができる(ST905〜ST911)。この結果、例えば振動体401、402を同時に同時間、同じ振幅で振動させた場合には、振動体401と、振動体402との中点C1の位置が振動したかのようにユーザに感じさせることができる。振動体403、404を同時に同時間、同じ振幅で振動させた場合には、振動体403と、振動体404との中点C2の位置が振動したかのようにユーザに感じさせることができる。同様に、振動体402、404を同時に同時間、同じ振幅で振動させた場合には、振動体402と、振動体404との中点C3の位置が振動したかのようにユーザに感じさせることができる。振動体401、403を同時に同時間、同じ振幅で振動させた場合には、振動体401と、振動体403との中点C4の位置が振動したかのようにユーザに感じさせることができる。
【0087】
以上のように、携帯端末装置400は、判定結果(なす角度)に基づき、中点C1〜中点C4のうちいずれかの位置が振動しているかのようにユーザに感じさせることができるので(ファントムセンセーション)、直感的な方位を提示することができる。
【0088】
また、第3の実施形態では、複数の振動体401〜404の振動の振幅が等しい例を示した。しかし、これに限定されず、例えば、制御部16が、判定結果(なす角度)に基づき、振動体401の振動の振幅の大きさに対する振動体402の振動の振幅の大きさの比率、又は振動体403の振動の振幅の大きさに対する振動体404の振動の振幅の大きさの比率、又は振動体402の振動の振幅の大きさに対する振動体404の振動の振幅の大きさの比率、振動体401の振動の振幅の大きさに対する振動体403の振動の振幅の大きさの比率を調整することができるようにするようにしてもよい。
【0089】
このような構成によれば、携帯端末装置400の周辺上の所望の位置が振動したようにユーザに感じさせることができる。この場合には、少ない4個の振動体401〜404で、目標位置への方位をユーザに細かく提示することができる。
【0090】
<第4の実施形態>
図10は、本技術の第4の実施形態に係る携帯端末装置に内蔵された複数の振動体の配設位置を示す図である。なお、本実施形態では、上記実施形態に比べて、複数の振動体の配設位置及び振動体の制御が異なるので、同一の構成要素等には同一の符号を付しその説明を省略し、異なる箇所を中心に説明する。
【0091】
第4の実施形態では、携帯端末装置500は、複数の振動体501、502、503、504、505、506、507、508、509、510、511、512、513、514、515、516、517、518、519、520を備えている。複数の振動体501〜520は、携帯端末装置500の筐体500Aに内蔵されており、それぞれ筐体500Aの周縁部に沿って1周するように配設されている。
【0092】
具体的には、携帯端末装置500のX方向に平行な一辺H1に沿って5個の振動体501〜505が隣接して配設されている。携帯端末装置500のX方向に平行な一辺H2に沿って5個の振動体511〜515が隣接して配設されている。携帯端末装置500のY方向に平行な一辺H3に沿って7個の振動体505〜511が隣接して配設されている。携帯端末装置500のY方向に平行な一辺H4に沿って7個の振動体515〜520、501が隣接して配設されている。
【0093】
携帯端末装置500の制御部16は、位置取得部11の出力信号S1、方位取得部12の出力信号S3及び目標位置取得部13の出力信号S4に基づいて、携帯端末装置500の方位を基準として携帯端末装置500から目標位置への方位を判定し、この判定結果(なす角度)に基づき、複数の振動体501〜505を所定の順に所定の時間間隔で振動させるための駆動信号を生成し複数の振動体501〜505に出力、又は複数の振動体511〜515を所定の順に所定の時間間隔で振動させるための駆動信号を生成し複数の振動体511〜515に出力、又は複数の振動体505〜511を所定の順に所定の時間間隔で振動させるための駆動信号を生成し複数の振動体505〜511に出力、又は複数の振動体501、520〜515を所定の順に所定の時間間隔で振動させるための駆動信号を生成し複数の振動体501、520〜515に出力することが可能に構成されている。
【0094】
図11は、図10に示す携帯端末装置の一動作例を説明するフローチャートである。
本動作例では、図11に示すST1101〜ST1103は、図4に示すST401〜ST403と(なす角度を演算するまで)同様であるので、その説明を省略し、ST1105以降について説明する。
【0095】
第4の実施形態の制御部16は、この判定結果(なす角度)が0度以上45度未満又は315度以上360度未満であるか否かを判定し(ST1105)、肯定判定の場合には、振動体501、505を同時に同時間、同じ振幅で駆動する(ST1106)。続いて、振動体502、504を同時に同時間、同じ振幅で駆動する(ST1107)。そして、振動体503を駆動体504と同じ駆動時間、同じ振幅で駆動する(ST1108)。
【0096】
このように、ST1105で肯定判定の場合には、ST1106により振動体503の位置が振動したかのようにユーザに感じさせることができ、ST1107によっても同じ振動体503の位置が振動したかのようにユーザに感じさせることができ、ST1108によって振動体503の位置を振動させることができる。
【0097】
一方、ST1105で否定判定のときには、制御部16は、なす角度が135度以上225度未満か否かを判定し(ST1109)、肯定判定の場合には、振動体511、515を同時に同時間、同じ振幅で駆動する(ST1110)。続いて、振動体512、514を同時に同時間、同じ振幅で駆動する(ST1111)。そして、振動体513を駆動体514と同じ駆動時間、同じ振幅で駆動する(ST1112)。
【0098】
このように、ST1109で肯定判定の場合には、ST1110により振動体513の位置が振動したかのようにユーザに感じさせることができ、ST1111によっても同じ振動体513の位置が振動したかのようにユーザに感じさせることができ、ST1112によって振動体513の位置を振動させることができる。
【0099】
ST1109で否定判定のときには、制御部16は、なす角度が45度以上135度未満であるか否かを判定し(ST1113)、肯定判定の場合には、振動体505、511を同時に同時間、同じ振幅で駆動する(ST1114)。続いて、振動体506、510を同時に同時間、同じ振幅で駆動する(ST1115)。続いて、振動体507、509を同時に同時間、同じ振幅で駆動する(ST1116)。そして、振動体508を振動体507と同じ駆動時間、同じ振幅で駆動する(ST1117)。
【0100】
このように、ST1113で肯定判定の場合には、ST1114により振動体508の位置が振動したかのようにユーザに感じさせることができ、ST1115によっても同じ振動体508の位置が振動したかのようにユーザに感じさせることができ、ST1116によっても振動体508の位置が振動したかのようにユーザに感じさせることができ、ST1117によって振動体508を振動させることができる。
【0101】
ST1113で否定判定のときには、つまり、なす角度が225度以上315度未満の場合には、制御部16は、振動体501、515を同時に同時間、同じ振幅で駆動する(ST1118)。続いて、振動体516、520を同時に同時間、同じ振幅で駆動する(ST1119)。続いて、振動体517、519を同時に同時間、同じ振幅で駆動する(ST1120)。そして、振動体518を振動体517と同じ駆動時間、同じ振幅で駆動する(ST1121)。
【0102】
このように、ST1113で否定判定の場合には、ST1118により振動体518の位置が振動したかのようにユーザに感じさせることができ、ST1119によっても同じ振動体518の位置が振動したかのようにユーザに感じさせることができ、ST1120によっても振動体518の位置が振動したかのようにユーザに感じさせることができ、ST1121によって振動体518を振動させることができる。
【0103】
このように本実施形態によれば、制御部16の判定結果(なす角度)に応じて、振動体503、振動体513、振動体508、又は振動体518が振動したようにユーザに感じさせることができる。
【0104】
また、本実施形態によれば、携帯端末装置500の周縁部に沿うように1周にわたって複数の振動体501〜520が内蔵されている。このため、ユーザの携帯端末装置500の持ち方や持つ位置に依存することなく、ユーザに目標位置への方位を確実に提示することができる。
【0105】
また、本実施形態では、複数の振動体を同時に振動させる例を示した。しかし、図10に示すように配設された複数の振動体501〜520の駆動制御の方法を変更するようにしてもよい。具体的には、Y方向プラス向きをユーザに提示するときには、制御部が振動体511、510、509・・・505をこの順に所定の時間間隔で駆動するようにしてもよい。X方向プラス向きをユーザに提示するときには、制御部が振動体515〜511をこの順に所定の時間間隔で駆動するようにしてもよい。このような制御によっても、直感的にユーザに方位を提示することができる。
【0106】
以上、本技術の実施形態について説明したが、本技術は上述の実施形態にのみ限定されるものではなく、本技術の要旨を逸脱しない範囲内において種々変更を加え得ることは勿論である。
【0107】
上記各実施形態では、例えばユーザにより予めキー入力部14から地図上の特定の目標位置が設定されている例を示した。しかし、例えばユーザがGPS機能を備えた別の携帯端末装置を目標として設定する場合にも適用可能である。この場合、位置取得部11は、ユーザによりキー入力部14から設定された目標の携帯端末装置の位置情報を取得し、位置情報に応じた出力信号を制御部16に出力する。この出力信号には、ユーザにより設定された目標の携帯端末装置の位置を示す経度、緯度等の位置情報が含まれている。また、制御部16は、携帯端末装置1の方位を基準として携帯端末装置1の位置から目標の携帯端末装置の位置への方位を判定し、判定結果に基づき振動部19の振動を制御するための駆動信号S5を生成する。具体的には、この判定は、携帯端末装置1の方位と、携帯端末装置1の位置から目標の携帯端末装置の位置への方位とのなす角度を判定する。この動作例では、携帯端末装置1は、この判定結果に基づき所定の振動体を駆動し、ユーザに対して目標の携帯端末装置の方位を直感的に提示することができる。
【0108】
上記各実施形態では、特定の個数の振動体を用いる例を示したが、個数は特に限定されない。例えば振動体を3個用いてもよいし、5個用いてもよい。これらの場合にも、同様に目標位置への方位(なす角度)を判定し、複数の振動体の少なくとも1個を駆動することで、方位を提示することができる。また、複数の振動体を順に所定の時間間隔で駆動することで、手の異なる位置に連続的に振動を与え、方位を提示することができる。
【0109】
上記第1の実施形態では、図3に示す振動体101〜104のうち1個を駆動する例を示した。しかし、目標位置のへ方位を提示するために、振動体101と振動体102とを同時に振動させたり、振動体101と振動体103とを同時に振動させたり、振動体102と振動体104とを同時に振動させたり、振動体103と振動体104とを同時に振動させたりするようにしてもよい。これにより、より細かい方位をユーザに直感的に提示することができる。
【0110】
第2の実施の形態では、筐体200A内に十字状に複数の振動体201〜211が内蔵されている例を示した。複数の振動体201〜211の個数、配設位置等はこれに限定されず、適宜変更可能である。
【0111】
第4の実施形態では、図10に示すように複数の振動体がX方向に5個、Y方向に7個配設されている例を示したが、複数の振動体の配設された個数はこれらに限定されない。
【0112】
なお、本技術は以下のような構成も採ることができる。
(1)筐体と、
前記筐体の内部に設けられた複数の振動体と、
前記筐体の位置から目標位置への方位を判定し、判定結果に基づいて前記複数の振動体のうち少なくとも1つの振動体を駆動することで、前記方位を提示する振動を前記筐体に発生させるように構成された制御部と
を具備する携帯端末装置。
(2)上記(1)に記載の携帯端末装置であって、
前記制御部は、前記判定結果に基づいて、前記複数の振動体のうち所定の複数の振動体を順に所定の時間間隔で振動させる携帯端末装置。
(3)上記(1)又は(2)に記載の携帯端末装置であって、
前記筐体は、前記筐体の長手方向に平行な2辺と前記長手方向に直交する2辺とを有する直方体形状を有し、
前記複数の振動体は、前記4辺の各中央位置に対応するように配設されている
携帯端末装置。
(4)上記(1)〜(3)の何れか1つに記載の携帯端末装置であって、
前記筐体は、前記筐体の長手方向に平行な第1の方向及び前記第1の方向に直交する第2の方向を有する直方体形状を有し、
前記複数の振動体は、前記筐体の中心に交点が位置するように前記第1の方向及び前記第2の方向にそれぞれ複数配設されている
携帯端末装置。
(5)上記(1)〜(4)の何れか1つに記載の携帯端末装置であって、
前記制御部は、前記判定結果に基づいて、前記複数の振動体のうち少なくとも2個の振動体を同時に振動させる携帯端末装置。
(6)上記(1)〜(5)の何れか1つに記載の携帯端末装置であって、
前記筐体は、直方体形状を有し、
前記複数の振動体は、前記筐体の4つの角に対応するように配設されている
携帯端末装置。
(7)上記(1)〜(6)の何れか1つに記載の携帯端末装置であって、
前記筐体は、直方体形状を有し、
前記複数の振動体は、前記筐体の周縁に沿うように配設されている
携帯端末装置。
(8)上記(1)〜(7)の何れか1つに記載の携帯端末装置であって、
前記複数の振動体は、隣接するように配設されており、
前記制御部は、前記判定結果に基づいて、前記複数の振動体のうち隣り合う振動体を順に所定の時間間隔で振動させる携帯端末装置。
(9)上記(1)〜(8)の何れか1つに記載の携帯端末装置であって、
前記筐体の位置の情報である第1の位置情報を取得し出力する第1の位置情報取得ユニットと、
前記目標位置の位置の情報である第2の位置情報を取得し出力する第2の位置情報取得ユニットと、
前記筐体の方位の情報である方位情報を取得し出力する方位情報取得ユニットと
を更に具備し、
前記制御部は、前記第1の位置情報、前記方位情報及び前記第2の位置情報に基づき、前記筐体の位置から目標位置への方位を判定する
携帯端末装置。
(10)上記(1)〜(9)の何れか1つに記載の携帯端末装置であって、
前記複数の振動体は、振動の波形が正弦波である携帯端末装置。
(11)筐体の位置の情報である第1の位置情報を取得し、
目標位置の位置の情報である第2の位置情報を取得し、
前記筐体の方位の情報である方位情報を取得し、
前記第1の位置情報、前記方位情報及び前記第2の位置情報に基づき、前記筐体の位置から前記目標位置への方位を判定し、
判定結果に基づいて、前記複数の振動体のうち少なくとも1つの振動体を駆動することで、前記方位を提示する振動を前記筐体に発生させる
方位提示方法。
【符号の説明】
【0113】
1,200,400,500…携帯端末装置
10,200A,410,500A…筐体
101〜104,201〜211,401〜404,501〜520…振動体
16…制御部
X…X方向
Y…Y方向
11…位置取得部(第1の位置情報取得ユニット,第2の位置情報取得ユニット)
12…方位取得部(方位情報取得ユニット)
13…目標位置取得部(第2の位置情報取得ユニット)
【特許請求の範囲】
【請求項1】
筐体と、
前記筐体の内部に設けられた複数の振動体と、
前記筐体の位置から目標位置への方位を判定し、判定結果に基づいて前記複数の振動体のうち少なくとも1つの振動体を駆動することで、前記方位を提示する振動を前記筐体に発生させるように構成された制御部と
を具備する携帯端末装置。
【請求項2】
請求項1に記載の携帯端末装置であって、
前記制御部は、前記判定結果に基づいて、前記複数の振動体のうち所定の複数の振動体を順に所定の時間間隔で振動させる携帯端末装置。
【請求項3】
請求項2に記載の携帯端末装置であって、
前記筐体は、前記筐体の長手方向に平行な2辺と前記長手方向に直交する2辺とを有する直方体形状を有し、
前記複数の振動体は、前記4辺の各中央位置に対応するように配設されている
携帯端末装置。
【請求項4】
請求項2に記載の携帯端末装置であって、
前記筐体は、前記筐体の長手方向に平行な第1の方向及び前記第1の方向に直交する第2の方向を有する直方体形状を有し、
前記複数の振動体は、前記筐体の中心に交点が位置するように前記第1の方向及び前記第2の方向にそれぞれ複数配設されている
携帯端末装置。
【請求項5】
請求項1に記載の携帯端末装置であって、
前記制御部は、前記判定結果に基づいて、前記複数の振動体のうち少なくとも2個の振動体を同時に振動させる携帯端末装置。
【請求項6】
請求項5に記載の携帯端末装置であって、
前記筐体は、直方体形状を有し、
前記複数の振動体は、前記筐体の4つの角に対応するように配設されている
携帯端末装置。
【請求項7】
請求項5に記載の携帯端末装置であって、
前記筐体は、直方体形状を有し、
前記複数の振動体は、前記筐体の周縁に沿うように配設されている
携帯端末装置。
【請求項8】
請求項1に記載の携帯端末装置であって、
前記複数の振動体は、隣接するように配設されており、
前記制御部は、前記判定結果に基づいて、前記複数の振動体のうち隣り合う振動体を順に所定の時間間隔で振動させる携帯端末装置。
【請求項9】
請求項1に記載の携帯端末装置であって、
前記筐体の位置の情報である第1の位置情報を取得し出力する第1の位置情報取得ユニットと、
前記目標位置の位置の情報である第2の位置情報を取得し出力する第2の位置情報取得ユニットと、
前記筐体の方位の情報である方位情報を取得し出力する方位情報取得ユニットと
を更に具備し、
前記制御部は、前記第1の位置情報、前記方位情報及び前記第2の位置情報に基づき、前記筐体の位置から目標位置への方位を判定する
携帯端末装置。
【請求項10】
請求項1に記載の携帯端末装置であって、
前記複数の振動体は、振動の波形が正弦波である携帯端末装置。
【請求項11】
筐体の位置の情報である第1の位置情報を取得し、
目標位置の位置の情報である第2の位置情報を取得し、
前記筐体の方位の情報である方位情報を取得し、
前記第1の位置情報、前記方位情報及び前記第2の位置情報に基づき、前記筐体の位置から前記目標位置への方位を判定し、
判定結果に基づいて、前記複数の振動体のうち少なくとも1つの振動体を駆動することで、前記方位を提示する振動を前記筐体に発生させる
方位提示方法。
【請求項1】
筐体と、
前記筐体の内部に設けられた複数の振動体と、
前記筐体の位置から目標位置への方位を判定し、判定結果に基づいて前記複数の振動体のうち少なくとも1つの振動体を駆動することで、前記方位を提示する振動を前記筐体に発生させるように構成された制御部と
を具備する携帯端末装置。
【請求項2】
請求項1に記載の携帯端末装置であって、
前記制御部は、前記判定結果に基づいて、前記複数の振動体のうち所定の複数の振動体を順に所定の時間間隔で振動させる携帯端末装置。
【請求項3】
請求項2に記載の携帯端末装置であって、
前記筐体は、前記筐体の長手方向に平行な2辺と前記長手方向に直交する2辺とを有する直方体形状を有し、
前記複数の振動体は、前記4辺の各中央位置に対応するように配設されている
携帯端末装置。
【請求項4】
請求項2に記載の携帯端末装置であって、
前記筐体は、前記筐体の長手方向に平行な第1の方向及び前記第1の方向に直交する第2の方向を有する直方体形状を有し、
前記複数の振動体は、前記筐体の中心に交点が位置するように前記第1の方向及び前記第2の方向にそれぞれ複数配設されている
携帯端末装置。
【請求項5】
請求項1に記載の携帯端末装置であって、
前記制御部は、前記判定結果に基づいて、前記複数の振動体のうち少なくとも2個の振動体を同時に振動させる携帯端末装置。
【請求項6】
請求項5に記載の携帯端末装置であって、
前記筐体は、直方体形状を有し、
前記複数の振動体は、前記筐体の4つの角に対応するように配設されている
携帯端末装置。
【請求項7】
請求項5に記載の携帯端末装置であって、
前記筐体は、直方体形状を有し、
前記複数の振動体は、前記筐体の周縁に沿うように配設されている
携帯端末装置。
【請求項8】
請求項1に記載の携帯端末装置であって、
前記複数の振動体は、隣接するように配設されており、
前記制御部は、前記判定結果に基づいて、前記複数の振動体のうち隣り合う振動体を順に所定の時間間隔で振動させる携帯端末装置。
【請求項9】
請求項1に記載の携帯端末装置であって、
前記筐体の位置の情報である第1の位置情報を取得し出力する第1の位置情報取得ユニットと、
前記目標位置の位置の情報である第2の位置情報を取得し出力する第2の位置情報取得ユニットと、
前記筐体の方位の情報である方位情報を取得し出力する方位情報取得ユニットと
を更に具備し、
前記制御部は、前記第1の位置情報、前記方位情報及び前記第2の位置情報に基づき、前記筐体の位置から目標位置への方位を判定する
携帯端末装置。
【請求項10】
請求項1に記載の携帯端末装置であって、
前記複数の振動体は、振動の波形が正弦波である携帯端末装置。
【請求項11】
筐体の位置の情報である第1の位置情報を取得し、
目標位置の位置の情報である第2の位置情報を取得し、
前記筐体の方位の情報である方位情報を取得し、
前記第1の位置情報、前記方位情報及び前記第2の位置情報に基づき、前記筐体の位置から前記目標位置への方位を判定し、
判定結果に基づいて、前記複数の振動体のうち少なくとも1つの振動体を駆動することで、前記方位を提示する振動を前記筐体に発生させる
方位提示方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−44706(P2013−44706A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−184691(P2011−184691)
【出願日】平成23年8月26日(2011.8.26)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月26日(2011.8.26)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]