
撹拌装置及び撹拌装置制御方法
【課題】撹拌装置において回転する撹拌子の停止位置を正確に検知して制御する。
【解決手段】第1方向に回転する第1方向回転磁界を発生させて撹拌子を第1方向に回転させ、第1方向に回転する撹拌子内部の磁石の磁界を検知部で検知した第1方向接近検知位置から、第1方向と反対の第2方向に回転する第2方向回転磁界を発生させて撹拌子を第2方向に回転させ、第2方向に回転する撹拌子内部の磁石について第1方向接近検知位置と同一の磁極の磁界を検知部で検知した第2方向接近検知位置に関して、第1方向接近検知位置から第2方向接近検知位置までの撹拌子の第2方向の回転角度から補正角度を算出し、第1方向接近検知位置から補正角度分を第1方向、もしくは、第2方向接近検知位置から補正角度分を第2方向に撹拌子を回転させる回転磁界を回転磁界発生部に発生させて、撹拌子を所定方向で停止するよう回転させる。
【解決手段】第1方向に回転する第1方向回転磁界を発生させて撹拌子を第1方向に回転させ、第1方向に回転する撹拌子内部の磁石の磁界を検知部で検知した第1方向接近検知位置から、第1方向と反対の第2方向に回転する第2方向回転磁界を発生させて撹拌子を第2方向に回転させ、第2方向に回転する撹拌子内部の磁石について第1方向接近検知位置と同一の磁極の磁界を検知部で検知した第2方向接近検知位置に関して、第1方向接近検知位置から第2方向接近検知位置までの撹拌子の第2方向の回転角度から補正角度を算出し、第1方向接近検知位置から補正角度分を第1方向、もしくは、第2方向接近検知位置から補正角度分を第2方向に撹拌子を回転させる回転磁界を回転磁界発生部に発生させて、撹拌子を所定方向で停止するよう回転させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は生化学自動分析装置において使用され、撹拌が行われる容器内で試料と試薬等を撹拌子の回転により撹拌する撹拌装置及び撹拌装置制御方法に関する。
【背景技術】
【0002】
生化学自動分析装置においては、複数の試料の分析作業が行われる。ここで、その分析作業時、スターラーと呼ばれる撹拌装置によって、例えば、反応容器内で試料と試薬等の液体の撹拌が行われる。
【0003】
この撹拌装置の仕組みとしては、撹拌すべき液の撹拌を行う容器内に、回動自在であって内部に棒磁石を備えた棒状の撹拌子が配備される。
【0004】
そして、前記容器外であって撹拌子近傍位置で回転磁場を発生させることで、容器内の撹拌子を非接触により回転させ、撹拌すべき液を十分に撹拌するような仕組みに構成されている。なお、回転磁場の発生は、撹拌子の棒状磁石に対応する磁極を備えた棒状磁石をモータで回転させるようにしている。
【0005】
この種の撹拌装置については、以下の特許文献にも記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−52986号公報
【特許文献2】特開2000−42393号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
生化学自動分析装置では、試料と試薬等を反応容器に導入して撹拌し、該試料と試薬の反応液を分析(測定)した後に該反応液を反応容器から排出している。
【0008】
しかし、発明者らが検討したところ、停止状態の撹拌子の向きにより、撹拌子に残液が付着し、次の分析に影響を与えることが判明した。
【0009】
ここで、撹拌子には棒状磁石が内蔵されているため、その磁極をホール素子で検知することで、撹拌子の停止時の位置や向きを検知することは可能である。
【0010】
このようなホール素子による位置検知については、特開2001−190054号公報に記載されているように、検知したい位置でN極とS極を密着させた磁石を配置し、ホール素子の検知結果の正負反転タイミング(ゼロクロスポイント)により、N極とS極とが密着して磁極の向きが切り替わる位置を正確に見極める手法が存在している。
【0011】
しかし、撹拌装置に用いられる撹拌子には、一端がS極であり他端がN極の棒状磁石が内蔵されているため、上述したゼロクロスポイントを用いた位置検知が適用できず、一定距離以下の接近/一定距離以上の離反といった大まかな検知しかできない。このため、停止状態の撹拌子の向きを正確に検知して制御することもできず、上述した撹拌子付着残液による分析精度低下の問題も解消できないことが判明した。
【0012】
本発明は以上の課題に鑑みてなされたものであって、その目的は、回転する撹拌子の停止位置を正確に検知して制御することが可能な撹拌装置と撹拌装置制御方法とを実現することである。
【課題を解決するための手段】
【0013】
すなわち、上記の課題を解決する本願発明は、以下のそれぞれに述べるようなものである。
【0014】
本発明は、内部に導入された液体が撹拌される容器と、前記容器内で鉛直方向を含む平面内で回動自在に設けられる棒状の撹拌子と、前記撹拌子の内部に配置される磁石と、前記撹拌子の回動方向に回転磁界を発生させる回転磁界発生部と、前記撹拌子が所定方向になる位置において前記磁石の磁界を検知する検知部と、前記回転磁界発生部が発生する回転磁界の発生と停止とを制御する制御部と、を備え、前記制御部は、第1方向に回転する第1方向回転磁界を発生させて前記撹拌子を第1方向に回転させ、前記第1方向に回転する前記撹拌子内部の前記磁石の磁界を前記検知部で検知した第1方向接近検知位置から、前記第1方向と反対向きの第2方向に回転する第2方向回転磁界を発生させて前記撹拌子を第2方向に回転させ、前記第2方向に回転する前記撹拌子内部の前記磁石について前記第1方向接近検知位置と同一の磁極の磁界を前記検知部で検知した第2方向接近検知位置に関して、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度を参照して補正角度を算出し、前記第1方向接近検知位置から前記補正角度分を前記第1方向、もしくは、前記第2方向接近検知位置から前記補正角度分を前記第2方向に前記撹拌子を回転させる回転磁界を前記回転磁界発生部に発生させることにより、前記撹拌子を前記所定方向で停止するように回転させる、ことを特徴とする。
【0015】
ここで、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度をA°、前記補正角度をB°とした場合、B=(360−A)/2、として前記補正角度を算出する、ことを特徴とする。
【0016】
また、ここで、駆動パルスに応じて回転する磁界を発生するものであり、前記補正角度および前記回転角度を駆動パルスのカウントにより行い、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転時のカウント値をa、前記補正角度B°に対応するパルス数をb、前記撹拌子の1回転360°分のカウント値をxとした場合、b=(x−a)/2、として前記補正角度を算出する、ことを特徴とする。
【0017】
また、前記所定方向は、前記撹拌子の長手方向が鉛直方向に一致する方向である、ことを特徴とする。
【発明の効果】
【0018】
これらの発明によると、以下のような効果を得ることができる。
【0019】
この撹拌装置は、内部に導入された液体が撹拌される容器と、容器内で鉛直方向を含む平面内で回動自在に設けられる棒状の撹拌子と、撹拌子の内部に配置される磁石と、撹拌子の回動方向に回転磁界を発生させる回転磁界発生部と、撹拌子が所定方向になる位置において磁石の磁界を検知する検知部と、回転磁界発生部が発生する回転磁界の発生と停止とを制御する制御部と、を備える。
【0020】
ここで、制御部は、第1方向に回転する第1方向回転磁界を発生させて撹拌子を第1方向に回転させ、第1方向に回転する撹拌子内部の磁石の磁界を検知部で検知した第1方向接近検知位置から、第1方向と反対向きの第2方向に回転する第2方向回転磁界を発生させて撹拌子を第2方向に回転させ、第2方向に回転する撹拌子内部の磁石について第1方向接近検知位置と同一の磁極の磁界を検知部で検知した第2方向接近検知位置に関して、第1方向接近検知位置から第2方向接近検知位置までの撹拌子の第2方向の回転角度を参照して補正角度を算出する。
【0021】
なお、第1方向接近検知位置から第2方向接近検知位置までの撹拌子の第2方向の回転角度をA°、補正角度をB°とした場合、B=(360−A)/2、として補正角度を算出する。または、補正角度および回転角度を駆動パルスのカウントにより行う場合、第1方向接近検知位置から第2方向接近検知位置までの撹拌子の第2方向の回転時のカウント値をa、補正角度B°に対応するパルス数をb、撹拌子の1回転360°分のカウント値をxとした場合、b=(x−a)/2、として補正角度を算出する。
【0022】
そして、第1方向接近検知位置から補正角度分を第1方向、もしくは、第2方向接近検知位置から補正角度分を第2方向に撹拌子を回転させる回転磁界を回転磁界発生部に発生させることにより、撹拌子の長手方向が鉛直方向に一致する方向である所定方向に、撹拌子を停止するように回転させる。
【0023】
これにより、回転する撹拌子の停止位置を正確に検知して制御することが可能になり、撹拌子の向きを正確に検知して鉛直方向に停止させることができる。この結果、撹拌子に残液が付着することがなくなり、残液によって次の分析精度が低下するといった事態を防止できる。
【図面の簡単な説明】
【0024】
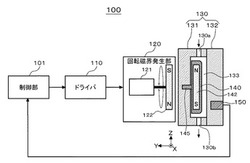
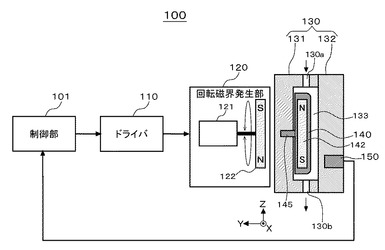
【図1】本発明の実施形態を適用した撹拌装置の構成を示す構成図である。
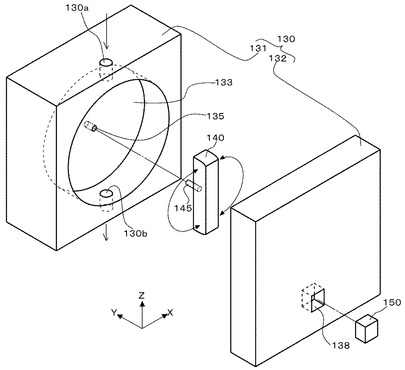
【図2】本発明の実施形態を適用した撹拌装置の主要部の構成を示す斜視図である。
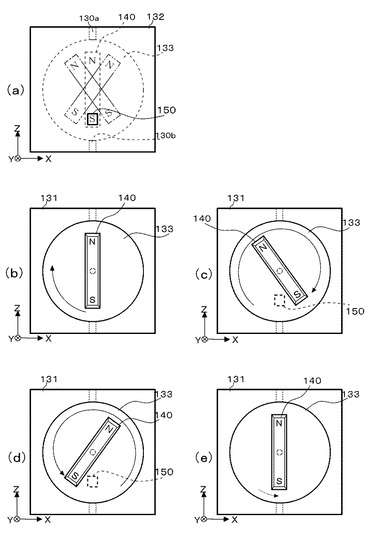
【図3】本発明の実施形態を適用した撹拌装置の動作例を示す説明図である。
【図4】本発明の実施形態を適用した撹拌装置の動作を示すフローチャートである。
【図5】本発明の実施形態を適用した撹拌装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0025】
以下、図面を参照して本発明の撹拌装置および撹拌装置制御方法を実施するための形態(実施形態)を詳細に説明する。
【0026】
〈第1実施形態〉
まず図1−図3を参照して第1実施形態の撹拌装置の構成を説明する。
【0027】
なお、この図1においては、撹拌装置100や周辺の各部を保持するための既知の基本的部材、液体を供給する配管やバルブなどについては省略し、実施形態の特徴部分の配置を中心に示した状態で撹拌装置を示している。
【0028】
また、図2では、撹拌装置の主要部として、内部に導入された液体が撹拌される容器と撹拌子とを分解斜視図として示している。
【0029】
さらに、図3では、前記容器内における撹拌子の回転の様子を示している。ここで、図1−図3において、X軸,Y軸,Z軸は対応しており、Z軸は鉛直方向であり、X軸とY軸とは水平面内の任意の方向である。
【0030】
制御部101は撹拌装置100の各部を制御するためCPUなどにより構成された制御手段であり、後述する回転磁界発生部120が発生する回転磁界の発生と停止とを制御する機能を有する。
【0031】
なお、生化学自動分析装置に含まれる撹拌装置の場合には、この図1の制御部101を、生化学自動分析装置全体の制御部と、撹拌装置100のコントローラとに、分けて構成することも可能である。
【0032】
ドライバ110は制御部101の制御に基づいて、回転磁界発生部120に駆動パルスを与える駆動手段である。
【0033】
回転磁界発生部120はドライバ110から供給される駆動パルスに基づいて撹拌子140を非接触で回転させるための回転磁界を発生させる回転磁界発生手段である。そして、回転磁界発生部120による回転磁界は、撹拌子140と同じXZ平面内で回転するものである。たとえば、回転磁界発生部120は、駆動パルスにより駆動されるパルスモータ121と該パルスモータによって回転させられる棒状磁石122、あるいは、駆動パルスによって回転磁界を発生させるステータコイル(図示せず)により構成される。なお、この棒状磁石122は、撹拌子140内部の磁石142と、近い大きさを有するものが望ましい。
【0034】
撹拌が行われる容器130は例えば試料や試薬などの各種液体の撹拌や反応等が行われる空間133を内部に備えた反応容器である。
【0035】
なお、この容器130は、空間133の凹部と撹拌子140用の軸受け凹部135とを備えるバックパネル131と、容器130の蓋部を構成すると共にホール素子150の取り付け部138を備えるフロントパネル132により構成される。なお、軸受け凹部135は、軸受けの長手方向をXY平面内に有するように構成される。
【0036】
また、容器130は、撹拌前の各種液体を外部から容器内(空間133)に導入するための導入部130aと、空間133で撹拌後の各種液体を外部に排出するための排出部130bとを備える。なお、導入部130a近傍と排出部130b近傍には、制御部101により開閉制御されるバルブ(図示せず)が設けられ、導入側バルブ開放による液体の導入、導入側バルブと排出側バルブ閉鎖による液体の撹拌、排出側バルブ開放による液体の排出、の制御が行われる。
【0037】
撹拌子140は軸部145が軸受け凹部135に嵌め込まれて、容器130内(前記空間133)で鉛直方向を含む平面内で回動自在に設けられる棒状の撹拌手段であり、内部には一端にS極・他端にN極の棒状の磁石142が埋め込まれて構成されている。なお、軸部145と軸受け凹部135とは摩擦が小さくなるように構成される。そして、磁石142と回転磁界発生部120からの回転磁界との間に働く磁力により、撹拌子140は容器130内(前記空間133)で回転磁界に応じて回転する。
【0038】
ホール素子150は容器130の取り付け部138に設けられ、撹拌子140が所定方向になる位置において、撹拌子140内部の磁石142の磁界を検知する検知部である。なお、ここで所定方向とは、撹拌子140の長手方向が鉛直方向に一致する方向である。また、ホール素子150の取り付け部138は、図1および図2に示される位置以外であっても、フロントパネル132側のZ軸上方、バックパネル131側のZ軸上方もしくは下方のいずれであっても、撹拌子140が所定方向(鉛直方向)になる位置を検知できれば良い。但し、回転磁界発生部120からの回転磁界ではなく、磁石142の磁界を検知できることが望ましい。
【0039】
ここで、図3(a)はフロントパネル132側から容器130を見た正面図であり、ホール素子150と、容器130内部の空間133と撹拌子140付近を破線もしくは鎖線で示している。
【0040】
また、図3(b)以降はフロントパネル132を外してバックパネル131と空間133と撹拌子140を、図3(a)と同じ観察位置から見た状態で示している。なお、この図3において、X軸,Y軸,Z軸は図1−2と対応しており、Z軸は鉛直方向であり、X軸とY軸とは水平面内で直交する任意の方向である。
【0041】
この実施形態において、ホール素子150は磁石142のS極の磁界を検知し、アクティブな信号を出力するものである場合、図3(a)の破線で示す撹拌子140の状態だけでなく、図3(a)の1点鎖線で示す撹拌子140の状態から図3(a)の2点鎖線で示す撹拌子140の状態の範囲でも、ホール素子150は磁石142のS極の磁界を検知してアクティブ信号を出力する。すなわち、単純にホール素子150のアクティブ信号を検知したのでは、正確な撹拌子140の位置検知ができない。これは、回転磁界による撹拌子140の駆動のために、従来の技術として説明したゼロクロスポイントを採用していないことに起因する。
【0042】
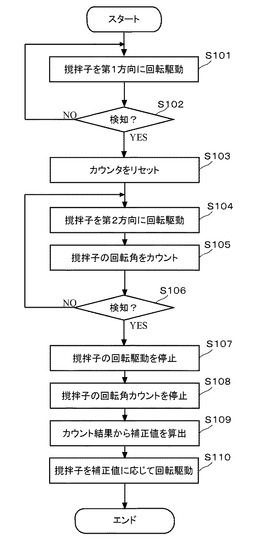
以下、図4のフローチャートを参照して本実施形態の各装置の動作、撹拌装置制御方法について説明する。なお、ここでは、撹拌子140の回転および停止の制御を中心に説明するため、導入側バルブや排出側バルブの開閉制御などの既知の制御についての説明は省略している。
【0043】
まず、制御部101は、ドライバ110から回転磁界発生部120に対して駆動パルスを供給して第1方向回転磁界を発生させる。すなわち、回転磁界発生部120では、ドライバ110から供給される駆動パルスに基づいてパルスモータ121が所定ステップ毎に駆動され、このパルスモータ121の回転軸に取り付けられた棒状磁石122が回転する。ここで、棒状磁石122のN極に撹拌子140内部の磁石142のS極が引き寄せられ、棒状磁石122のS極に撹拌子140内部の磁石142のN極が引き寄せられ、棒状磁石122の第1方向の回転に合わせて、撹拌子140がXZ平面内で第1方向に回転する(図4中のステップS101)。
【0044】
なお、ここでの第1方向と後述する第2方向とは反対向きの回転方向であり、図3では時計回転方向を第1方向としているが、反時計方向を第1方向としても良く、任意に定めることができる。
【0045】
ここでは、制御部101は、撹拌子140内部の磁石142のS極の磁界がホール素子150によって検知されるまで、以上のようにして回転磁界発生部120から第1方向に回転する回転磁界を発生させて撹拌子140を第1方向に回転させる(図3(b)、図4中のステップS101〜S102)。
【0046】
そして、撹拌子140内部の磁石142のS極の磁界がホール素子150によって検知されてアクティブ信号が出力されると(図3(c)、図4中のステップS102でYES)、この撹拌子140の位置を第1方向接近検知位置として、制御部101はカウンタのカウント値をリセットする(図4中のステップS103)。なお、カウンタ(図示せず)は制御部101内部であるか外部でるかを問わず、ソフトウェアで実現してもハードウェアで実現しても良い。
【0047】
そして、制御部101は、ドライバ110から回転磁界発生部120に対して駆動パルスを供給して第2方向回転磁界を発生させて撹拌子140を第2方向に回転させ(図4中のステップS104)、この第1方向接近検知位置から第2方向の回転における駆動パルスのカウントを開始する(図4中のステップS105)。
【0048】
ここで、制御部101は、第2方向に回転する撹拌子140内部の磁石142のS極の磁界がホール素子150によって検知されるまで、以上のようにして回転磁界発生部120から第2方向に回転する回転磁界を発生させて撹拌子140を第2方向に回転させる(図4中のステップS104〜S105)。
【0049】
そして、撹拌子140内部の磁石142のS極の磁界がホール素子150によって検知されてアクティブ信号が出力されると(図3(d)、図4中のステップS106でYES)、制御部101は、ドライバ110から回転磁界発生部120への駆動パルスを停止させることで第2方向回転磁界を停止させて、撹拌子140の第2方向の回転を停止させる(図4中のステップS107)。また、制御部101は、この撹拌子140の位置を第2方向接近検知位置として、第2方向の回転における駆動パルスのカウントを停止する(図4中のステップS108)。
【0050】
ここで、第1接近検知位置でホール素子150が検知した磁石142のS極と異なるN極についてもアクティブ信号を出力する場合には、制御部101はN極についてのアクティブ信号を無効として扱い、第1接近検知位置でホール素子150が検知した磁石142のS極と同じS極についてのアクティブ信号を有効として扱う。なお、第1接近検知位置でホール素子150がN極を検知しているカウントを開始している場合には、制御部101はS極についてのアクティブ信号を無効として扱い、第1接近検知位置でホール素子150が検知した磁石142のN極と同じN極についてのアクティブ信号を有効として扱えば良い。
【0051】
そして、制御部101は、第2方向に回転する撹拌子140内部の磁石142について第1方向接近検知位置と同一の磁極の磁界をホール素子150で検知した第2方向接近検知位置に関して、第1方向接近検知位置から第2方向接近検知位置までの駆動パルスのカウント値を参照して補正角度を算出する(図4中のステップS109)。
【0052】
ここで、第1方向接近検知位置から第2方向接近検知位置までの撹拌子140の第2回転方向の回転時の駆動パルスのカウント値をa、補正角度B°に対応する駆動パルスのパルス数をb、撹拌子140の1回転360°分の駆動パルスのカウント値をxとした場合、制御部101は、b=(x−a)/2、として補正角度を算出する。
【0053】
また、制御部101が駆動パルスではなく角度を検知できる場合には、第1方向接近検知位置から第2方向接近検知位置までの撹拌子140の第2回転方向の回転角度をA°、補正角度をB°とした場合、B=(360−A)/2、として補正角度を算出する。
【0054】
そして、制御部101は、ドライバ110から回転磁界発生部120に対して以上の補正角度Bに対応するパルス数bの駆動パルスを供給して、第2方向回転磁界を発生させる(図4中のステップS110)。これにより、第2方向接近検知位置で停止している撹拌子140は、鉛直方向に一致する所定方向まで回転駆動(図3(e))されて停止する。
【0055】
以上のような制御により、回転する撹拌子140の停止位置を正確に検知して制御することが可能になり、撹拌子140の向きを正確に検知して鉛直方向に停止させることができる。このような鉛直方向に停止させることで、撹拌子140に残液が付着することがなくなり、残液によって次の分析精度が低下するといった事態を防止できる。
【0056】
なお、ホール素子150や磁石142の性能劣化、部品交換により生じる感度変化、などによって生じる誤差を軽減するためには、一定期間ごと、望ましくは、各動作毎に以上の制御を行うことが望ましい。
【0057】
〈第2実施形態〉
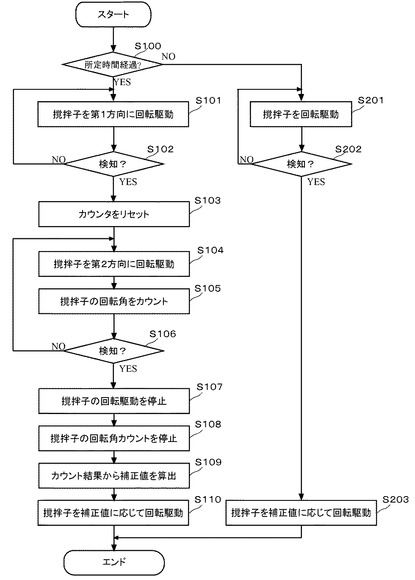
以上の第1実施形態に示したように各動作毎に以上の制御を行うことが望ましいが、補正角度を求めてから所定時間が経過する前であれば、既に求めた補正角度を使用することも可能である。
【0058】
この場合、制御部101は、前回補正角度を算出してからの経過時間が所定時間未満であれば(図5中のステップS100でNO)、撹拌子140を第2方向に回転させて(図5中のステップS201)、第2方向接近検知位置に達したら(図5中のステップS202でYES)、求めておいた補正角度B(駆動パルスb)を用いて第2方向に回転駆動して所定の鉛直方向に撹拌子140を停止させるように制御する。なお、制御部101は、第1方向に回転させて(図5中のステップS201)、第1方向接近検知位置に達したら(図5中のステップS202でYES)、求めておいた補正角度B(駆動パルスb)を用いて第1方向に回転駆動して所定の鉛直方向に撹拌子140を停止させるように制御しても良い。
【0059】
また、前回補正角度を算出してからの経過時間が所定時間以上であれば(図5中のステップS100でYES)、第1実施形態と同様な処理を実行する(図5中のステップS101〜S110)。この処理は第1実施形態と同じ内容であるため、重複した説明を省略する。
【0060】
このような第2実施形態によれば、連続して撹拌を実行する際の処理効率を向上させることが可能になる。
【0061】
〈その他の実施形態〉
なお、以上の実施形態では鉛直方向に撹拌子140を停止させるように制御していたが、本実施形態を適用することで撹拌子140を異なる停止位置となるように制御することも可能である。
【0062】
また、撹拌子140全体ではなく、撹拌子140の特に残液が付着しやすい部分を鉛直方向に停止させるように制御し、残液の付着をなくすようにして、残液によって次の分析精度が低下する事態を防止することも可能である。
【0063】
また、以上の実施形態の撹拌装置100は、生化学自動分析装置に組み込むことも可能であるが、単独で撹拌装置として使用することも可能である。
【0064】
また、以上の実施形態の撹拌装置100は、生化学自動分析装置の反応容器内で試料と試薬等を撹拌するものを具体例に示したが、生化学自動分析装置の希釈容器内で試料と希釈液とを撹拌する場合に適用できることは言うまでもない。
【符号の説明】
【0065】
100 撹拌装置
101 制御部
110 ドライバ
120 回転磁界発生部
130 容器(反応容器)
131 バックパネル
132 フロントパネル
133 空間
140 撹拌子
142 磁石
145 軸
150 ホール素子
【技術分野】
【0001】
本発明は生化学自動分析装置において使用され、撹拌が行われる容器内で試料と試薬等を撹拌子の回転により撹拌する撹拌装置及び撹拌装置制御方法に関する。
【背景技術】
【0002】
生化学自動分析装置においては、複数の試料の分析作業が行われる。ここで、その分析作業時、スターラーと呼ばれる撹拌装置によって、例えば、反応容器内で試料と試薬等の液体の撹拌が行われる。
【0003】
この撹拌装置の仕組みとしては、撹拌すべき液の撹拌を行う容器内に、回動自在であって内部に棒磁石を備えた棒状の撹拌子が配備される。
【0004】
そして、前記容器外であって撹拌子近傍位置で回転磁場を発生させることで、容器内の撹拌子を非接触により回転させ、撹拌すべき液を十分に撹拌するような仕組みに構成されている。なお、回転磁場の発生は、撹拌子の棒状磁石に対応する磁極を備えた棒状磁石をモータで回転させるようにしている。
【0005】
この種の撹拌装置については、以下の特許文献にも記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2009−52986号公報
【特許文献2】特開2000−42393号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
生化学自動分析装置では、試料と試薬等を反応容器に導入して撹拌し、該試料と試薬の反応液を分析(測定)した後に該反応液を反応容器から排出している。
【0008】
しかし、発明者らが検討したところ、停止状態の撹拌子の向きにより、撹拌子に残液が付着し、次の分析に影響を与えることが判明した。
【0009】
ここで、撹拌子には棒状磁石が内蔵されているため、その磁極をホール素子で検知することで、撹拌子の停止時の位置や向きを検知することは可能である。
【0010】
このようなホール素子による位置検知については、特開2001−190054号公報に記載されているように、検知したい位置でN極とS極を密着させた磁石を配置し、ホール素子の検知結果の正負反転タイミング(ゼロクロスポイント)により、N極とS極とが密着して磁極の向きが切り替わる位置を正確に見極める手法が存在している。
【0011】
しかし、撹拌装置に用いられる撹拌子には、一端がS極であり他端がN極の棒状磁石が内蔵されているため、上述したゼロクロスポイントを用いた位置検知が適用できず、一定距離以下の接近/一定距離以上の離反といった大まかな検知しかできない。このため、停止状態の撹拌子の向きを正確に検知して制御することもできず、上述した撹拌子付着残液による分析精度低下の問題も解消できないことが判明した。
【0012】
本発明は以上の課題に鑑みてなされたものであって、その目的は、回転する撹拌子の停止位置を正確に検知して制御することが可能な撹拌装置と撹拌装置制御方法とを実現することである。
【課題を解決するための手段】
【0013】
すなわち、上記の課題を解決する本願発明は、以下のそれぞれに述べるようなものである。
【0014】
本発明は、内部に導入された液体が撹拌される容器と、前記容器内で鉛直方向を含む平面内で回動自在に設けられる棒状の撹拌子と、前記撹拌子の内部に配置される磁石と、前記撹拌子の回動方向に回転磁界を発生させる回転磁界発生部と、前記撹拌子が所定方向になる位置において前記磁石の磁界を検知する検知部と、前記回転磁界発生部が発生する回転磁界の発生と停止とを制御する制御部と、を備え、前記制御部は、第1方向に回転する第1方向回転磁界を発生させて前記撹拌子を第1方向に回転させ、前記第1方向に回転する前記撹拌子内部の前記磁石の磁界を前記検知部で検知した第1方向接近検知位置から、前記第1方向と反対向きの第2方向に回転する第2方向回転磁界を発生させて前記撹拌子を第2方向に回転させ、前記第2方向に回転する前記撹拌子内部の前記磁石について前記第1方向接近検知位置と同一の磁極の磁界を前記検知部で検知した第2方向接近検知位置に関して、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度を参照して補正角度を算出し、前記第1方向接近検知位置から前記補正角度分を前記第1方向、もしくは、前記第2方向接近検知位置から前記補正角度分を前記第2方向に前記撹拌子を回転させる回転磁界を前記回転磁界発生部に発生させることにより、前記撹拌子を前記所定方向で停止するように回転させる、ことを特徴とする。
【0015】
ここで、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度をA°、前記補正角度をB°とした場合、B=(360−A)/2、として前記補正角度を算出する、ことを特徴とする。
【0016】
また、ここで、駆動パルスに応じて回転する磁界を発生するものであり、前記補正角度および前記回転角度を駆動パルスのカウントにより行い、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転時のカウント値をa、前記補正角度B°に対応するパルス数をb、前記撹拌子の1回転360°分のカウント値をxとした場合、b=(x−a)/2、として前記補正角度を算出する、ことを特徴とする。
【0017】
また、前記所定方向は、前記撹拌子の長手方向が鉛直方向に一致する方向である、ことを特徴とする。
【発明の効果】
【0018】
これらの発明によると、以下のような効果を得ることができる。
【0019】
この撹拌装置は、内部に導入された液体が撹拌される容器と、容器内で鉛直方向を含む平面内で回動自在に設けられる棒状の撹拌子と、撹拌子の内部に配置される磁石と、撹拌子の回動方向に回転磁界を発生させる回転磁界発生部と、撹拌子が所定方向になる位置において磁石の磁界を検知する検知部と、回転磁界発生部が発生する回転磁界の発生と停止とを制御する制御部と、を備える。
【0020】
ここで、制御部は、第1方向に回転する第1方向回転磁界を発生させて撹拌子を第1方向に回転させ、第1方向に回転する撹拌子内部の磁石の磁界を検知部で検知した第1方向接近検知位置から、第1方向と反対向きの第2方向に回転する第2方向回転磁界を発生させて撹拌子を第2方向に回転させ、第2方向に回転する撹拌子内部の磁石について第1方向接近検知位置と同一の磁極の磁界を検知部で検知した第2方向接近検知位置に関して、第1方向接近検知位置から第2方向接近検知位置までの撹拌子の第2方向の回転角度を参照して補正角度を算出する。
【0021】
なお、第1方向接近検知位置から第2方向接近検知位置までの撹拌子の第2方向の回転角度をA°、補正角度をB°とした場合、B=(360−A)/2、として補正角度を算出する。または、補正角度および回転角度を駆動パルスのカウントにより行う場合、第1方向接近検知位置から第2方向接近検知位置までの撹拌子の第2方向の回転時のカウント値をa、補正角度B°に対応するパルス数をb、撹拌子の1回転360°分のカウント値をxとした場合、b=(x−a)/2、として補正角度を算出する。
【0022】
そして、第1方向接近検知位置から補正角度分を第1方向、もしくは、第2方向接近検知位置から補正角度分を第2方向に撹拌子を回転させる回転磁界を回転磁界発生部に発生させることにより、撹拌子の長手方向が鉛直方向に一致する方向である所定方向に、撹拌子を停止するように回転させる。
【0023】
これにより、回転する撹拌子の停止位置を正確に検知して制御することが可能になり、撹拌子の向きを正確に検知して鉛直方向に停止させることができる。この結果、撹拌子に残液が付着することがなくなり、残液によって次の分析精度が低下するといった事態を防止できる。
【図面の簡単な説明】
【0024】
【図1】本発明の実施形態を適用した撹拌装置の構成を示す構成図である。
【図2】本発明の実施形態を適用した撹拌装置の主要部の構成を示す斜視図である。
【図3】本発明の実施形態を適用した撹拌装置の動作例を示す説明図である。
【図4】本発明の実施形態を適用した撹拌装置の動作を示すフローチャートである。
【図5】本発明の実施形態を適用した撹拌装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0025】
以下、図面を参照して本発明の撹拌装置および撹拌装置制御方法を実施するための形態(実施形態)を詳細に説明する。
【0026】
〈第1実施形態〉
まず図1−図3を参照して第1実施形態の撹拌装置の構成を説明する。
【0027】
なお、この図1においては、撹拌装置100や周辺の各部を保持するための既知の基本的部材、液体を供給する配管やバルブなどについては省略し、実施形態の特徴部分の配置を中心に示した状態で撹拌装置を示している。
【0028】
また、図2では、撹拌装置の主要部として、内部に導入された液体が撹拌される容器と撹拌子とを分解斜視図として示している。
【0029】
さらに、図3では、前記容器内における撹拌子の回転の様子を示している。ここで、図1−図3において、X軸,Y軸,Z軸は対応しており、Z軸は鉛直方向であり、X軸とY軸とは水平面内の任意の方向である。
【0030】
制御部101は撹拌装置100の各部を制御するためCPUなどにより構成された制御手段であり、後述する回転磁界発生部120が発生する回転磁界の発生と停止とを制御する機能を有する。
【0031】
なお、生化学自動分析装置に含まれる撹拌装置の場合には、この図1の制御部101を、生化学自動分析装置全体の制御部と、撹拌装置100のコントローラとに、分けて構成することも可能である。
【0032】
ドライバ110は制御部101の制御に基づいて、回転磁界発生部120に駆動パルスを与える駆動手段である。
【0033】
回転磁界発生部120はドライバ110から供給される駆動パルスに基づいて撹拌子140を非接触で回転させるための回転磁界を発生させる回転磁界発生手段である。そして、回転磁界発生部120による回転磁界は、撹拌子140と同じXZ平面内で回転するものである。たとえば、回転磁界発生部120は、駆動パルスにより駆動されるパルスモータ121と該パルスモータによって回転させられる棒状磁石122、あるいは、駆動パルスによって回転磁界を発生させるステータコイル(図示せず)により構成される。なお、この棒状磁石122は、撹拌子140内部の磁石142と、近い大きさを有するものが望ましい。
【0034】
撹拌が行われる容器130は例えば試料や試薬などの各種液体の撹拌や反応等が行われる空間133を内部に備えた反応容器である。
【0035】
なお、この容器130は、空間133の凹部と撹拌子140用の軸受け凹部135とを備えるバックパネル131と、容器130の蓋部を構成すると共にホール素子150の取り付け部138を備えるフロントパネル132により構成される。なお、軸受け凹部135は、軸受けの長手方向をXY平面内に有するように構成される。
【0036】
また、容器130は、撹拌前の各種液体を外部から容器内(空間133)に導入するための導入部130aと、空間133で撹拌後の各種液体を外部に排出するための排出部130bとを備える。なお、導入部130a近傍と排出部130b近傍には、制御部101により開閉制御されるバルブ(図示せず)が設けられ、導入側バルブ開放による液体の導入、導入側バルブと排出側バルブ閉鎖による液体の撹拌、排出側バルブ開放による液体の排出、の制御が行われる。
【0037】
撹拌子140は軸部145が軸受け凹部135に嵌め込まれて、容器130内(前記空間133)で鉛直方向を含む平面内で回動自在に設けられる棒状の撹拌手段であり、内部には一端にS極・他端にN極の棒状の磁石142が埋め込まれて構成されている。なお、軸部145と軸受け凹部135とは摩擦が小さくなるように構成される。そして、磁石142と回転磁界発生部120からの回転磁界との間に働く磁力により、撹拌子140は容器130内(前記空間133)で回転磁界に応じて回転する。
【0038】
ホール素子150は容器130の取り付け部138に設けられ、撹拌子140が所定方向になる位置において、撹拌子140内部の磁石142の磁界を検知する検知部である。なお、ここで所定方向とは、撹拌子140の長手方向が鉛直方向に一致する方向である。また、ホール素子150の取り付け部138は、図1および図2に示される位置以外であっても、フロントパネル132側のZ軸上方、バックパネル131側のZ軸上方もしくは下方のいずれであっても、撹拌子140が所定方向(鉛直方向)になる位置を検知できれば良い。但し、回転磁界発生部120からの回転磁界ではなく、磁石142の磁界を検知できることが望ましい。
【0039】
ここで、図3(a)はフロントパネル132側から容器130を見た正面図であり、ホール素子150と、容器130内部の空間133と撹拌子140付近を破線もしくは鎖線で示している。
【0040】
また、図3(b)以降はフロントパネル132を外してバックパネル131と空間133と撹拌子140を、図3(a)と同じ観察位置から見た状態で示している。なお、この図3において、X軸,Y軸,Z軸は図1−2と対応しており、Z軸は鉛直方向であり、X軸とY軸とは水平面内で直交する任意の方向である。
【0041】
この実施形態において、ホール素子150は磁石142のS極の磁界を検知し、アクティブな信号を出力するものである場合、図3(a)の破線で示す撹拌子140の状態だけでなく、図3(a)の1点鎖線で示す撹拌子140の状態から図3(a)の2点鎖線で示す撹拌子140の状態の範囲でも、ホール素子150は磁石142のS極の磁界を検知してアクティブ信号を出力する。すなわち、単純にホール素子150のアクティブ信号を検知したのでは、正確な撹拌子140の位置検知ができない。これは、回転磁界による撹拌子140の駆動のために、従来の技術として説明したゼロクロスポイントを採用していないことに起因する。
【0042】
以下、図4のフローチャートを参照して本実施形態の各装置の動作、撹拌装置制御方法について説明する。なお、ここでは、撹拌子140の回転および停止の制御を中心に説明するため、導入側バルブや排出側バルブの開閉制御などの既知の制御についての説明は省略している。
【0043】
まず、制御部101は、ドライバ110から回転磁界発生部120に対して駆動パルスを供給して第1方向回転磁界を発生させる。すなわち、回転磁界発生部120では、ドライバ110から供給される駆動パルスに基づいてパルスモータ121が所定ステップ毎に駆動され、このパルスモータ121の回転軸に取り付けられた棒状磁石122が回転する。ここで、棒状磁石122のN極に撹拌子140内部の磁石142のS極が引き寄せられ、棒状磁石122のS極に撹拌子140内部の磁石142のN極が引き寄せられ、棒状磁石122の第1方向の回転に合わせて、撹拌子140がXZ平面内で第1方向に回転する(図4中のステップS101)。
【0044】
なお、ここでの第1方向と後述する第2方向とは反対向きの回転方向であり、図3では時計回転方向を第1方向としているが、反時計方向を第1方向としても良く、任意に定めることができる。
【0045】
ここでは、制御部101は、撹拌子140内部の磁石142のS極の磁界がホール素子150によって検知されるまで、以上のようにして回転磁界発生部120から第1方向に回転する回転磁界を発生させて撹拌子140を第1方向に回転させる(図3(b)、図4中のステップS101〜S102)。
【0046】
そして、撹拌子140内部の磁石142のS極の磁界がホール素子150によって検知されてアクティブ信号が出力されると(図3(c)、図4中のステップS102でYES)、この撹拌子140の位置を第1方向接近検知位置として、制御部101はカウンタのカウント値をリセットする(図4中のステップS103)。なお、カウンタ(図示せず)は制御部101内部であるか外部でるかを問わず、ソフトウェアで実現してもハードウェアで実現しても良い。
【0047】
そして、制御部101は、ドライバ110から回転磁界発生部120に対して駆動パルスを供給して第2方向回転磁界を発生させて撹拌子140を第2方向に回転させ(図4中のステップS104)、この第1方向接近検知位置から第2方向の回転における駆動パルスのカウントを開始する(図4中のステップS105)。
【0048】
ここで、制御部101は、第2方向に回転する撹拌子140内部の磁石142のS極の磁界がホール素子150によって検知されるまで、以上のようにして回転磁界発生部120から第2方向に回転する回転磁界を発生させて撹拌子140を第2方向に回転させる(図4中のステップS104〜S105)。
【0049】
そして、撹拌子140内部の磁石142のS極の磁界がホール素子150によって検知されてアクティブ信号が出力されると(図3(d)、図4中のステップS106でYES)、制御部101は、ドライバ110から回転磁界発生部120への駆動パルスを停止させることで第2方向回転磁界を停止させて、撹拌子140の第2方向の回転を停止させる(図4中のステップS107)。また、制御部101は、この撹拌子140の位置を第2方向接近検知位置として、第2方向の回転における駆動パルスのカウントを停止する(図4中のステップS108)。
【0050】
ここで、第1接近検知位置でホール素子150が検知した磁石142のS極と異なるN極についてもアクティブ信号を出力する場合には、制御部101はN極についてのアクティブ信号を無効として扱い、第1接近検知位置でホール素子150が検知した磁石142のS極と同じS極についてのアクティブ信号を有効として扱う。なお、第1接近検知位置でホール素子150がN極を検知しているカウントを開始している場合には、制御部101はS極についてのアクティブ信号を無効として扱い、第1接近検知位置でホール素子150が検知した磁石142のN極と同じN極についてのアクティブ信号を有効として扱えば良い。
【0051】
そして、制御部101は、第2方向に回転する撹拌子140内部の磁石142について第1方向接近検知位置と同一の磁極の磁界をホール素子150で検知した第2方向接近検知位置に関して、第1方向接近検知位置から第2方向接近検知位置までの駆動パルスのカウント値を参照して補正角度を算出する(図4中のステップS109)。
【0052】
ここで、第1方向接近検知位置から第2方向接近検知位置までの撹拌子140の第2回転方向の回転時の駆動パルスのカウント値をa、補正角度B°に対応する駆動パルスのパルス数をb、撹拌子140の1回転360°分の駆動パルスのカウント値をxとした場合、制御部101は、b=(x−a)/2、として補正角度を算出する。
【0053】
また、制御部101が駆動パルスではなく角度を検知できる場合には、第1方向接近検知位置から第2方向接近検知位置までの撹拌子140の第2回転方向の回転角度をA°、補正角度をB°とした場合、B=(360−A)/2、として補正角度を算出する。
【0054】
そして、制御部101は、ドライバ110から回転磁界発生部120に対して以上の補正角度Bに対応するパルス数bの駆動パルスを供給して、第2方向回転磁界を発生させる(図4中のステップS110)。これにより、第2方向接近検知位置で停止している撹拌子140は、鉛直方向に一致する所定方向まで回転駆動(図3(e))されて停止する。
【0055】
以上のような制御により、回転する撹拌子140の停止位置を正確に検知して制御することが可能になり、撹拌子140の向きを正確に検知して鉛直方向に停止させることができる。このような鉛直方向に停止させることで、撹拌子140に残液が付着することがなくなり、残液によって次の分析精度が低下するといった事態を防止できる。
【0056】
なお、ホール素子150や磁石142の性能劣化、部品交換により生じる感度変化、などによって生じる誤差を軽減するためには、一定期間ごと、望ましくは、各動作毎に以上の制御を行うことが望ましい。
【0057】
〈第2実施形態〉
以上の第1実施形態に示したように各動作毎に以上の制御を行うことが望ましいが、補正角度を求めてから所定時間が経過する前であれば、既に求めた補正角度を使用することも可能である。
【0058】
この場合、制御部101は、前回補正角度を算出してからの経過時間が所定時間未満であれば(図5中のステップS100でNO)、撹拌子140を第2方向に回転させて(図5中のステップS201)、第2方向接近検知位置に達したら(図5中のステップS202でYES)、求めておいた補正角度B(駆動パルスb)を用いて第2方向に回転駆動して所定の鉛直方向に撹拌子140を停止させるように制御する。なお、制御部101は、第1方向に回転させて(図5中のステップS201)、第1方向接近検知位置に達したら(図5中のステップS202でYES)、求めておいた補正角度B(駆動パルスb)を用いて第1方向に回転駆動して所定の鉛直方向に撹拌子140を停止させるように制御しても良い。
【0059】
また、前回補正角度を算出してからの経過時間が所定時間以上であれば(図5中のステップS100でYES)、第1実施形態と同様な処理を実行する(図5中のステップS101〜S110)。この処理は第1実施形態と同じ内容であるため、重複した説明を省略する。
【0060】
このような第2実施形態によれば、連続して撹拌を実行する際の処理効率を向上させることが可能になる。
【0061】
〈その他の実施形態〉
なお、以上の実施形態では鉛直方向に撹拌子140を停止させるように制御していたが、本実施形態を適用することで撹拌子140を異なる停止位置となるように制御することも可能である。
【0062】
また、撹拌子140全体ではなく、撹拌子140の特に残液が付着しやすい部分を鉛直方向に停止させるように制御し、残液の付着をなくすようにして、残液によって次の分析精度が低下する事態を防止することも可能である。
【0063】
また、以上の実施形態の撹拌装置100は、生化学自動分析装置に組み込むことも可能であるが、単独で撹拌装置として使用することも可能である。
【0064】
また、以上の実施形態の撹拌装置100は、生化学自動分析装置の反応容器内で試料と試薬等を撹拌するものを具体例に示したが、生化学自動分析装置の希釈容器内で試料と希釈液とを撹拌する場合に適用できることは言うまでもない。
【符号の説明】
【0065】
100 撹拌装置
101 制御部
110 ドライバ
120 回転磁界発生部
130 容器(反応容器)
131 バックパネル
132 フロントパネル
133 空間
140 撹拌子
142 磁石
145 軸
150 ホール素子
【特許請求の範囲】
【請求項1】
内部に導入された液体が撹拌される容器と、
前記容器内で鉛直方向を含む平面内で回動自在に設けられる撹拌子と、
前記撹拌子の内部に配置される磁石と、
前記撹拌子の回動方向に回転磁界を発生させる回転磁界発生部と、
前記撹拌子が所定方向になる位置において前記磁石の磁界を検知する検知部と、
前記回転磁界発生部が発生する回転磁界の発生と停止とを制御する制御部と、
を備え、
前記制御部は、
第1方向に回転する第1方向回転磁界を発生させて前記撹拌子を第1方向に回転させ、
前記第1方向に回転する前記撹拌子内部の前記磁石の磁界を前記検知部で検知した第1方向接近検知位置から、前記第1方向と反対向きの第2方向に回転する第2方向回転磁界を発生させて前記撹拌子を第2方向に回転させ、
前記第2方向に回転する前記撹拌子内部の前記磁石について前記第1方向接近検知位置と同一の磁極の磁界を前記検知部で検知した第2方向接近検知位置に関して、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度を参照して補正角度を算出し、
前記第2方向接近検知位置から前記補正角度分を前記第2方向に前記撹拌子を回転させる回転磁界を前記回転磁界発生部に発生させることにより、前記撹拌子を前記所定方向で停止するように回転させる、
ことを特徴とする撹拌装置。
【請求項2】
前記制御部は、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度をA°、前記補正角度をB°とした場合、B=(360−A)/2、として前記補正角度を算出する、
ことを特徴とする請求項1に記載の撹拌装置。
【請求項3】
前記回転磁界発生部は、前記制御部からの駆動パルスに応じて回転する磁界を発生するものであり、
前記制御部は、前記補正角度および前記回転角度を前記駆動パルスのカウントにより行い、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転時のカウント値をa、前記補正角度B°に対応するパルス数をb、前記撹拌子の1回転360°分のカウント値をxとした場合
b=(x−a)/2、
として前記補正角度を算出する、
ことを特徴とする請求項1に記載の撹拌装置。
【請求項4】
前記所定方向は、前記撹拌子の長手方向が鉛直方向に一致する方向である、
ことを特徴とする請求項1−3のいずれか一項に記載の撹拌装置。
【請求項5】
内部に導入された液体が撹拌される容器と、前記容器内で鉛直方向を含む平面内で回動自在に設けられる撹拌子と、前記撹拌子の内部に配置される磁石と、前記撹拌子の回動方向に回転磁界を発生させる回転磁界発生部と、前記撹拌子が鉛直方向になる位置において前記磁石の磁界を検知する検知部と、前記回転磁界発生部が発生する回転磁界の発生と停止とを制御する制御部と、を備えた撹拌装置を制御する撹拌装置制御方法であって、
第1方向に回転する第1方向回転磁界を発生させて前記撹拌子を第1方向に回転させ、
前記第1方向に回転する前記撹拌子内部の前記磁石の磁界を前記検知部で検知した第1方向接近検知位置から、前記第1方向と反対向きの第2方向に回転する第2方向回転磁界を発生させて前記撹拌子を第2方向に回転させ、
前記第2方向に回転する前記撹拌子内部の前記磁石について前記第1方向接近検知位置と同一の磁極の磁界を前記検知部で検知した第2方向接近検知位置に関して、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度を参照して補正角度を算出し、
前記第2方向接近検知位置から前記補正角度分を前記第2方向に前記撹拌子を回転させる回転磁界を前記回転磁界発生部に発生させることにより、前記撹拌子を前記所定方向で停止するように回転させる、
ことを特徴とする撹拌装置制御方法。
【請求項1】
内部に導入された液体が撹拌される容器と、
前記容器内で鉛直方向を含む平面内で回動自在に設けられる撹拌子と、
前記撹拌子の内部に配置される磁石と、
前記撹拌子の回動方向に回転磁界を発生させる回転磁界発生部と、
前記撹拌子が所定方向になる位置において前記磁石の磁界を検知する検知部と、
前記回転磁界発生部が発生する回転磁界の発生と停止とを制御する制御部と、
を備え、
前記制御部は、
第1方向に回転する第1方向回転磁界を発生させて前記撹拌子を第1方向に回転させ、
前記第1方向に回転する前記撹拌子内部の前記磁石の磁界を前記検知部で検知した第1方向接近検知位置から、前記第1方向と反対向きの第2方向に回転する第2方向回転磁界を発生させて前記撹拌子を第2方向に回転させ、
前記第2方向に回転する前記撹拌子内部の前記磁石について前記第1方向接近検知位置と同一の磁極の磁界を前記検知部で検知した第2方向接近検知位置に関して、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度を参照して補正角度を算出し、
前記第2方向接近検知位置から前記補正角度分を前記第2方向に前記撹拌子を回転させる回転磁界を前記回転磁界発生部に発生させることにより、前記撹拌子を前記所定方向で停止するように回転させる、
ことを特徴とする撹拌装置。
【請求項2】
前記制御部は、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度をA°、前記補正角度をB°とした場合、B=(360−A)/2、として前記補正角度を算出する、
ことを特徴とする請求項1に記載の撹拌装置。
【請求項3】
前記回転磁界発生部は、前記制御部からの駆動パルスに応じて回転する磁界を発生するものであり、
前記制御部は、前記補正角度および前記回転角度を前記駆動パルスのカウントにより行い、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転時のカウント値をa、前記補正角度B°に対応するパルス数をb、前記撹拌子の1回転360°分のカウント値をxとした場合
b=(x−a)/2、
として前記補正角度を算出する、
ことを特徴とする請求項1に記載の撹拌装置。
【請求項4】
前記所定方向は、前記撹拌子の長手方向が鉛直方向に一致する方向である、
ことを特徴とする請求項1−3のいずれか一項に記載の撹拌装置。
【請求項5】
内部に導入された液体が撹拌される容器と、前記容器内で鉛直方向を含む平面内で回動自在に設けられる撹拌子と、前記撹拌子の内部に配置される磁石と、前記撹拌子の回動方向に回転磁界を発生させる回転磁界発生部と、前記撹拌子が鉛直方向になる位置において前記磁石の磁界を検知する検知部と、前記回転磁界発生部が発生する回転磁界の発生と停止とを制御する制御部と、を備えた撹拌装置を制御する撹拌装置制御方法であって、
第1方向に回転する第1方向回転磁界を発生させて前記撹拌子を第1方向に回転させ、
前記第1方向に回転する前記撹拌子内部の前記磁石の磁界を前記検知部で検知した第1方向接近検知位置から、前記第1方向と反対向きの第2方向に回転する第2方向回転磁界を発生させて前記撹拌子を第2方向に回転させ、
前記第2方向に回転する前記撹拌子内部の前記磁石について前記第1方向接近検知位置と同一の磁極の磁界を前記検知部で検知した第2方向接近検知位置に関して、前記第1方向接近検知位置から前記第2方向接近検知位置までの前記撹拌子の前記第2方向の回転角度を参照して補正角度を算出し、
前記第2方向接近検知位置から前記補正角度分を前記第2方向に前記撹拌子を回転させる回転磁界を前記回転磁界発生部に発生させることにより、前記撹拌子を前記所定方向で停止するように回転させる、
ことを特徴とする撹拌装置制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−166162(P2012−166162A)
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願番号】特願2011−30419(P2011−30419)
【出願日】平成23年2月16日(2011.2.16)
【出願人】(000004271)日本電子株式会社 (811)
【Fターム(参考)】
【公開日】平成24年9月6日(2012.9.6)
【国際特許分類】
【出願日】平成23年2月16日(2011.2.16)
【出願人】(000004271)日本電子株式会社 (811)
【Fターム(参考)】
[ Back to top ]