
操作感触付与型入力装置
【課題】より少ない電力で大きな回転抵抗を発生させることができ、合わせて自立的な回転力を発生させることができる操作感触付与型入力装置を提供する。
【解決手段】操作感触付与型入力装置10は、回転操作される操作部12と、操作部12の回転状態を検出するフォトインタラプタ18,19と、操作部12とともに回転するアーマチュアロータ22と、アーマチュアロータ22を介して操作部12に回転抵抗を付与する電磁ブレーキ24と、電磁ブレーキ24とは別に回転軸14を通じて操作部12に自立回転力を付与する電動モータ30とを備える。制御部28は、回転抵抗を付与する場合は電磁ブレーキ24のみを駆動して電力の消費を抑えるとともに、電動モータ30を駆動して操作部12を自立回転させることもできる。
【解決手段】操作感触付与型入力装置10は、回転操作される操作部12と、操作部12の回転状態を検出するフォトインタラプタ18,19と、操作部12とともに回転するアーマチュアロータ22と、アーマチュアロータ22を介して操作部12に回転抵抗を付与する電磁ブレーキ24と、電磁ブレーキ24とは別に回転軸14を通じて操作部12に自立回転力を付与する電動モータ30とを備える。制御部28は、回転抵抗を付与する場合は電磁ブレーキ24のみを駆動して電力の消費を抑えるとともに、電動モータ30を駆動して操作部12を自立回転させることもできる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、各種の電子機器や車載電装品等の入力デバイスとして利用することができ、その際、操作者に力学的な操作感触を付与することができる操作感触付与型入力装置に関する。
【背景技術】
【0002】
この種の操作感触付与型入力装置に関して、操作部に操作感触を付与するアクチュエータとして回転モータを用いるものや(例えば、特許文献1参照。)、電磁ブレーキを用いるもの(例えば、特許文献2参照。)が先行技術として知られている。
【0003】
前者の先行技術は、回転モータの出力によって操作部を自立的に回転させることができるため、その回転力の方向を適宜切り替えることで、例えば操作者の回転操作と反対方向に回転抵抗を発生させることもできるし、回転操作と同じ方向に自立回転力を発生させることもできる。また、操作者が操作を止めた(操作部から手を離した)状態でも、自立回転力によって操作部を所望の回転位置(原点位置等)まで復帰させることもできる。
【0004】
一方で後者の先行技術は、電磁ブレーキによる摩擦で回転抵抗を発生させることはできるものの、その動作はあくまで受動的であり、操作部を自立的に回転させることはできない。ただし電磁ブレーキは、摩擦を利用して大きな回転抵抗を発生させることができるため、回転モータに比べて電力の変換効率に優れるという利点がある。例えば、操作部の回転をある特定の位置で規制しようとする場合(いわゆる壁感触を付与する場合)、電磁ブレーキは回転モータに比較して電力の消費が少ないという利点がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−251845号公報
【特許文献2】特開2005−28510号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記のように、操作部を自立的に回転させるためには、アクチュエータに回転モータを使用する必要がある。この場合、操作部に回転抵抗を発生させることもできるし、自立的に回転させることもできるが、より少ない電力で大きな回転抵抗を発生させることには向かない。これに対し、電磁ブレーキを用いた場合はより少ない電力で大きな回転抵抗を発生することができるものの、操作部を自立的に回転させることはできなくなる。
【0007】
そこで本発明は、より少ない電力で大きな回転抵抗を発生させることができ、合わせて自立的な回転力を発生させることができる操作感触付与型入力装置を提供しようとするものである。
【課題を解決するための手段】
【0008】
解決手段1:本発明は、操作者により回転操作される操作部と、操作部の回転状態を検出して出力する回転状態検出手段と、操作部への回転操作に対する回転抵抗又は操作部を自立的に回転させる自立回転力の少なくとも一方を操作部に与えるアクチュエータと、回転状態検出手段からの出力に基づき算出した操作部の回転位置とその回転方向に基づきアクチュエータの作動状態を制御する制御手段とを備えた操作感触付与型入力装置である。
【0009】
その上で本発明におけるアクチュエータは、操作部とともに回転するロータ部材を操作部とともに回転しない状態に固定されたステータ部材に圧着させて回転抵抗を発生させるブレーキ手段と、操作部を回転させて自立回転力を発生させるモータ手段とから構成されている。
【0010】
上記のように本発明では、アクチュエータをブレーキ手段とモータ手段の2つの駆動源から構成することができる。このため、アクチュエータは操作部に回転抵抗を発生させる場合、ブレーキ手段又はモータ手段のいずれを用いてもよい(両方を用いてもよい)が、特に大きな回転抵抗を発生させる場合は主にブレーキ手段を活用することで、全体として消費電力を少なく抑えることができる。またモータ手段を活用すれば、所望の回転位置まで操作部を自立的に回転させることができる。
【0011】
またアクチュエータは、ブレーキ手段だけで回転抵抗を発生させることもできるし、あるいは、モータ手段だけで回転抵抗を発生させることもできる。さらに、モータ手段とブレーキ手段とを協働させて(パラレルに)回転抵抗を発生させることもできるので、必要に応じてより強力な回転抵抗を発生することができる。
【0012】
さらにアクチュエータは、ブレーキ手段により回転抵抗を発生させながら、同時にモータ手段によって自立回転力を発生させることもできる。この場合、操作者には自分の操作に対する適度な抵抗感触を付与しつつ、その間に操作部があたかも自立的に回転していくことがあるかのような感触を与えることができる。これにより、回転抵抗の発生を主にブレーキ手段で賄うことで消費電力を少なく抑えながら、自立回転力を発生可能なモータ手段を合わせて使用することで、より多様な操作感触の付与を実現することができる。
【0013】
解決手段2:解決手段1の操作感触付与型入力装置において、制御手段は、操作部に対する回転操作の方向と反対方向の回転抵抗を発生させる場合はブレーキ手段を作動させ、操作部に対する回転操作の方向と同じ方向の自立回転力を発生させる場合はモータ手段を作動させることができる。
【0014】
この場合、回転抵抗の発生をブレーキ手段だけで賄えるので、より少ない電力で大きな回転抵抗を発生させることができるし、操作部を自立回転力によって回転させることもできるので、ある一方向への回転操作中に操作部の回転が加速した(軽くなった)かのような操作感触を付与することができる。
【0015】
解決手段3:解決手段1の操作感触付与型入力装置において、制御手段は、操作部に対する回転操作が一方向に連続して行われる場合、回転状態検出手段からの出力に基づいて算出した回転位置が所定位置に達するまでの間はモータ手段のみを作動させて操作部に対する回転操作の方向と反対方向への回転抵抗又は操作部に対する回転操作の方向と同じ方向への自立回転力のいずれかを発生させ、算出した回転位置が所定位置に達するとブレーキ手段のみを作動させて操作部に対する回転操作の方向と反対方向への回転抵抗を発生させることもできる。
【0016】
この場合、操作部の回転位置が所定位置に達するまでの間、モータ手段だけを作動させて操作感触を付与することができるので、それだけ制御を容易に行うことができる。一方、操作部が所定位置まで回転すると、そこから一気にブレーキ手段を作動させて回転抵抗を付与することができるので、より少ない電力で大きな抵抗感触を与えることができる。
【0017】
解決手段4:あるいは、解決手段1の操作感触付与型入力装置において、アクチュエータは、操作部とともに回転しつつ、その回転軸線に沿う方向に移動可能に配置された磁性金属からなるアーマチュアロータと、アーマチュアロータを回転軸線に沿う方向へ吸着する電磁コイルと、アーマチュアロータと電磁コイルとの間に配置され、回転軸線に沿う方向でみてアーマチュアロータに対向する摩擦部材と電磁コイルに対向する圧電素子とを重ね合わせて構成されたステータとからなる態様であってもよい。
【0018】
この場合、制御手段は、電磁コイルにのみ通電した状態でアクチュエータをブレーキ手段(電磁的なブレーキ)として機能させる一方、電磁コイル及び圧電素子の両方に通電した状態ではアクチュエータを超音波モータとして機能させることができる。
【0019】
上記の構成であれば、ブレーキ手段のアーマチュアロータを超音波モータのロータとしても利用できる上、超音波モータのステータをブレーキ手段のステータ(特に摩擦部材)としても利用することができる。このため、アクチュエータをモータ手段とブレーキ手段とで構成する場合でも、それぞれの部品点数を少なくすることができる。
【0020】
また一般的な超音波モータは、ステータの表面に生じる進行波を利用してロータを回転させるものであるから、その構造上、ロータをステータに対して常時強く密着させておく必要がある。このため、単純にブレーキ手段(電磁的なブレーキ)と超音波モータとを2つ併用しただけでは、超音波モータの非作動時にもロータとステータとの間には強い摩擦が存在するため、操作部に回転抵抗を付与したくない場合でも回転抵抗が生じてしまう。これを取り除くには、さらに別の機構的手段(例えばクラッチ機構等)を設ける必要があり、それだけ構造が複雑化してしまう。
【0021】
この点、解決手段4の構成では、ブレーキ手段のロータをアーマチュアロータとし、これをブレーキ手段の作動時にのみ生じる吸着力でステータに圧着させるため、ブレーキ手段を作動させない限り、アーマチュアロータとステータとの間に摩擦は発生しない。したがって、ブレーキ手段を非作動にすれば超音波モータも作動可能な状態にならないので、特に別の機構的手段を設けなくても、必要な場合にだけ回転抵抗を発生させることができる。
【0022】
解決手段5:また本発明は、以下の構成であってもよい。すなわち本発明の操作感触付与型入力装置は、操作者により移動操作される操作部と、操作部の移動状態を検出して出力する移動状態検出手段と、操作部への移動操作に対する移動抵抗又は操作部を自立的に移動させる自立移動力の少なくとも一方を操作部に与えるアクチュエータと、移動状態検出手段からの出力に基づき算出した操作部の移動位置とその移動方向に基づきアクチュエータの作動状態を制御する制御手段とを備える。そしてアクチュエータは、操作部とともに移動する移動部材を操作部とともに移動しない状態に固定されたステータ部材に圧着させて移動抵抗を発生させるブレーキ手段と、操作部を移動させて自立移動力を発生させるモータ手段とから構成される。
【0023】
この場合でも、アクチュエータは操作部に移動抵抗を発生させる場合、ブレーキ手段又はモータ手段のいずれを用いてもよい(両方を用いてもよい)が、特に大きな移動抵抗を発生させる場合は主にブレーキ手段を活用することで、全体として消費電力を少なく抑えることができる。またモータ手段を活用すれば、所望の位置まで操作部を自立的に移動させることができる。
【0024】
またアクチュエータは、ブレーキ手段だけで移動抵抗を発生させることもできるし、あるいは、モータ手段だけで移動抵抗を発生させることもできる。さらに、モータ手段とブレーキ手段とを協働させて(パラレルに)移動抵抗を発生させることもできるので、必要に応じてより強力な移動抵抗を発生することができる。
【0025】
さらにアクチュエータは、ブレーキ手段により移動抵抗を発生させながら、同時にモータ手段によって自立移動力を発生させることもできる。この場合、操作者には自分の操作に対する適度な抵抗感触を付与しつつ、その間に操作部があたかも自立的に移動していくことがあるかのような感触を与えることができる。これにより、移動抵抗の発生を主にブレーキ手段で賄うことで消費電力を少なく抑えながら、自立移動力を発生可能なモータ手段を合わせて使用することで、より多様な操作感触の付与を実現することができる。
【0026】
解決手段6:解決手段5において、制御手段は、操作部に対する移動操作の方向と反対方向の移動抵抗を発生させる場合はブレーキ手段を作動させ、操作部に対する移動操作の方向と同じ方向の自立移動力を発生させる場合はモータ手段を作動させる。
【0027】
この場合、移動抵抗の発生をブレーキ手段だけで賄えるので、より少ない電力で大きな移動抵抗を発生させることができるし、操作部を自立移動力によって移動させることもできるので、ある方向への移動操作中に操作部の移動が加速した(軽くなった)かのような操作感触を付与することができる。
【0028】
解決手段7:あるいは解決手段5において、制御手段は、操作部に対する移動操作が一方向に連続して行われる場合、移動状態検出手段からの出力に基づいて算出した移動位置が所定位置に達するまでの間はモータ手段のみを作動させて操作部に対する移動操作の方向と反対方向への移動抵抗又は操作部に対する移動操作の方向と同じ方向への自立移動力のいずれかを発生させ、算出した移動位置が所定位置に達するとブレーキ手段のみを作動させて操作部に対する移動操作の方向と反対方向への移動抵抗を発生させてもよい。
【0029】
この場合、操作部の移動位置が所定位置に達するまでの間、モータ手段だけを作動させて操作感触を付与することができるので、それだけ制御を容易に行うことができる。一方、操作部が所定位置まで移動すると、そこから一気にブレーキ手段を作動させて移動抵抗を付与することができるので、より少ない電力で大きな抵抗感触を与えることができる。
【発明の効果】
【0030】
本発明の操作感触付与型入力装置は、より少ない消費電力で大きな回転抵抗を付与することができる上、操作部を自立回転させることができる。また、アクチュエータが回転抵抗と自立回転力を同時に発生させることができるので、より多様な操作感触を付与することができる。
【0031】
また本発明の操作感触付与型入力装置は、より少ない消費電力で大きな移動抵抗を付与することができる上、操作部を自立移動させることができる。また、アクチュエータが移動抵抗と自立移動力を同時に発生させることができるので、より多様な操作感触を付与することができる。
【図面の簡単な説明】
【0032】
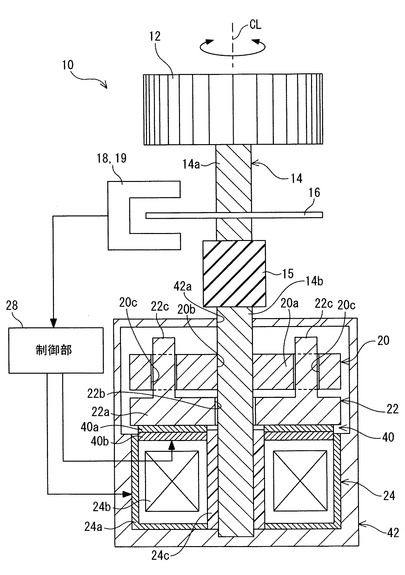
【図1】第1実施形態の操作感触付与型入力装置の全体的な構成を示す概略図である。
【図2】回転部材と摩擦板との連結関係を示す平面図(図1中のII−II断面を含む)である。
【図3】操作感触付与型入力装置の制御系の構成を概略的に示すブロック図である。
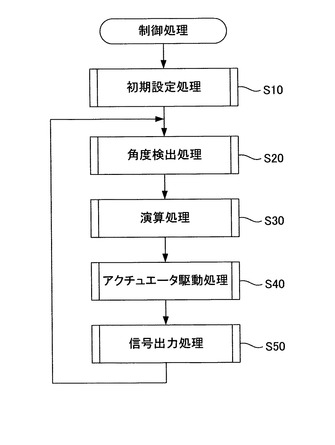
【図4】制御部(演算部)が実行する制御処理の手順例を示すフローチャートである。
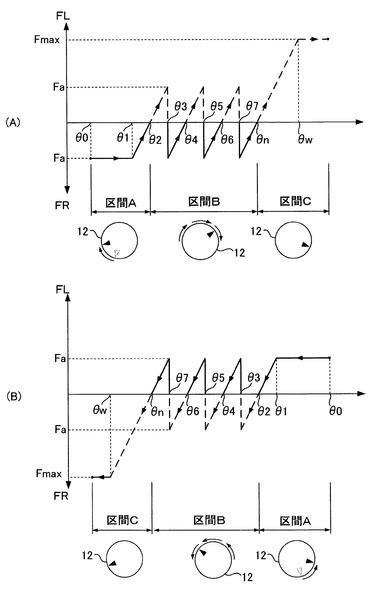
【図5】演算処理において演算に用いることができるフォースカーブの第1例及び第2例を示した図である。
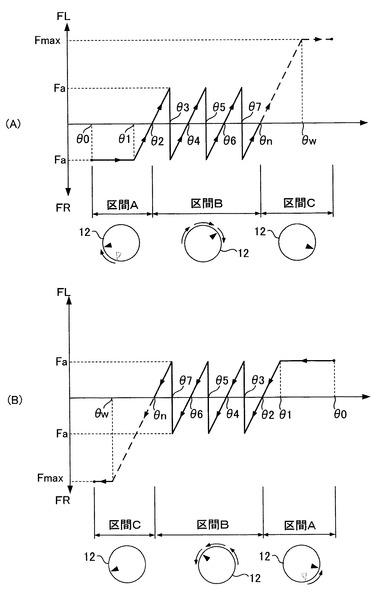
【図6】演算処理において演算に用いることができるフォースカーブの第3例及び第4例を示した図である。
【図7】第2実施形態の操作感触付与型入力装置の全体的な構成を示す概略図である。
【図8】超音波モータを駆動する際に出力される駆動用信号と電磁ブレーキの駆動電圧のパターンとともに、操作部に付与される回転抵抗のフォースカーブを合わせて示した図である。
【図9】主に超音波モータによって自立回転力を付与する場合の駆動用信号と電磁ブレーキ24の駆動電圧のパターンとを示した図である。
【発明を実施するための形態】
【0033】
以下、本発明の実施形態について図面を参照しながら説明する。本発明の操作感触付与型入力装置は、例えば、各種の電子機器(コンピュータ機器、オーディオ機器、ビデオ機器)をはじめ、カーナビゲーション装置等の車載電装品用の入力デバイス(ユーザインタフェース)として利用することができる。
【0034】
〔第1実施形態〕
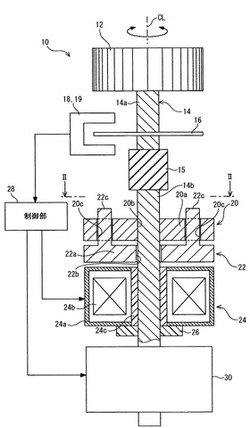
図1は、第1実施形態の操作感触付与型入力装置10の全体的な構成を示す概略図である。図1中、操作感触付与型入力装置10の機械的な構成は、その大部分が縦断面により示されている。また図1中、操作感触付与型入力装置10の電気的な構成はブロック要素として示されている。
【0035】
〔操作部〕
操作感触付与型入力装置10は操作部12を備えており、この操作部12は、例えば回転式のつまみ形状(ダイヤル形状)をなしている。操作者は操作部12をつまんだ状態で回転操作することができ、このとき操作部12は図中に一点鎖線で示される回転軸線CLの回りに回転する。
【0036】
操作部12は、例えば回転軸14の一端に連結されている。この回転軸14は上記の回転軸線CLに沿って操作部12から一方向(図1中の下方向)に延びており、回転軸14は操作部12とともに回転軸線CLの回りに回転する。
【0037】
なお回転軸14には、その軸方向の途中に弾性部材15が介挿して設けられている。このため回転軸14は、弾性部材15を挟んで軸方向に第1パーツ14aと第2パーツ14bとに分割された構造を有している。なお、弾性部材15と第1パーツ14a、第2パーツ14bとは、それぞれの接合部で強固に接合されている。また弾性部材15には、例えば材料としてゴムを使用することができる。
【0038】
〔回転状態の検出〕
回転軸14(第1パーツ14a)の外周には、被検出体であるコード板16が取り付けられている。このコード板16は回転軸14を中心とした薄板の円盤形状をなしており、その周方向には一定ピッチで図示しないスリットが形成されている。またコード板16の外周部には、回転方向の原点位置を基点として周方向に図示しないインデックス(遮光部)が形成されている。
【0039】
回転軸14の近傍位置には、検出部として例えば2つのフォトインタラプタ18,19が設置されており、これらフォトインタラプタ18,19は、それぞれ検出光が互いに異なる位置でコード板16のスリットを透過する関係に調整されている。操作部12が回転操作されると、これに伴って回転軸14とともにコード板16が回転し、2つのフォトインタラプタ18,19から互いに位相差を持った回転角信号(エンコーダパルス)が出力される。なおフォトインタラプタ18,19は、これらが一体化されたパルスエンコーダでもよい。
【0040】
また回転軸14には、例えば第2パーツ14bの軸方向でみた中央付近に回転部材20が取り付けられている。回転部材20は、例えば円盤形状の本体部20aを有しており、この本体部20aは回転軸14(第2パーツ14b)を中心としてラジアル方向に拡がっている。本体部20aの中央位置には貫通孔20bが形成されており、この貫通孔20bは本体部20aを厚み方向に貫通して形成されている。そして回転部材20は、貫通孔20bの内部に回転軸14(第2パーツ14b)を挿通させた状態で回転軸14に固定されている。このため回転部材20は、操作部12が操作されると回転軸14とともに回転軸線CLの回りに回転する。
【0041】
〔アーマチュアロータ〕
また回転軸14には、回転軸線CLに沿う方向でみて回転部材20に隣接する位置にアーマチュアロータ22が取り付けられている。このアーマチュアロータ22もまた、例えば円盤形状の本体部22aを有するとともに、その中央位置には挿通孔22bが形成されている。アーマチュアロータ22の挿通孔22bもまた本体部22aを厚み方向に貫通しているが、その内径は回転軸14の外径よりもわずかに大きい。このためアーマチュアロータ22は回転軸14(第2パーツ14b)に対して固定されておらず、回転軸14や回転部材20に対しては回転軸線CLの回りに相対回転が可能な状態で支持されている。
【0042】
またアーマチュアロータ22は、挿通孔22b内に回転軸14(第2パーツ14b)を挿通させた状態で、中心軸線CLに沿う方向へ僅かに変位可能である。なお回転軸14の外周面と挿通孔22bの内周面との間には、例えば回転軸14に沿ってスライド自在な軸受(図示していない)が設けられていてもよい。またアーマチュアロータ22は、その全体が磁性金属(例えば鉄)で構成されている。
【0043】
〔電磁ブレーキ(ブレーキ手段)〕
第1実施形態の操作感触付与型入力装置10は、アクチュエータの構成要素として電磁ブレーキ24を備えている。この電磁ブレーキ24は、例えば中空の円柱形状をなすケース型コア24aを有しており、このケース型コア24aの内部にフープ状の巻線24b(電磁コイル)を配置した構造である。ケース型コア24aの中央には例えば樹脂製の軸受24cが設けられており、回転軸14の他端部(図1でみて下端部)はこの軸受24cを介してケース型コア24aに回転自在に支持されている。電磁ブレーキ24は、巻線24bに通電された状態でケース型コア24aに電磁力を発生させ、上記のアーマチュアロータ22をスラスト方向に吸着することができる。
【0044】
なお、回転軸14の他端(第2パーツ14b)はケース型コア24aを貫通して回転部材20やアーマチュアロータ22と反対方向(図1でみて下方向)へ突出しており、この突出位置で回転軸14(第2パーツ14b)にはフランジ形状のストッパ26が取り付けられている。このストッパ26は、ケース型コア24aに対して回転軸14がその軸方向(図1で上方向)へずれるのを防止している。
【0045】
〔電動モータ(モータ手段)〕
また第1実施形態の操作感触付与型入力装置10は、アクチュエータの構成要素として上記の電磁ブレーキ24とは別に電動モータ30を備えている。第1実施形態において、電動モータ30は例えばDCモータである。電動モータ30は、その出力軸が回転軸14(第2パーツ14b)と一体化されているか、もしくは回転軸14と同軸に連結されている。
【0046】
ここでは特に図示していないが、電磁ブレーキ24及び電動モータ30は、それぞれ別の装置本体や、操作感触付与型入力装置10を収容する筐体に固定されている。このため操作部12が回転操作されても、それによって電磁ブレーキ24や電動モータ30が連れ回りすることはない。
【0047】
また操作感触付与型入力装置10は制御部28を備えており、この制御部28にはフォトインタラプタ18,19や電磁ブレーキ24、電動モータ30が接続されている。なお、制御部28を中心とした制御系の構成についてはさらに後述する。
【0048】
〔自立回転力の付与〕
操作感触付与型入力装置10は、アクチュエータを構成する電動モータ30に通電することで、その駆動力により回転軸14を回転させ、操作部12に自立的な回転力(自立回転力)を付与することができる。
【0049】
〔回転抵抗の付与〕
また操作感触付与型入力装置10は、上記の電磁ブレーキ24に通電することでアーマチュアロータ22を引き付け、アーマチュアロータ22を介して回転部材20に摩擦抵抗を付与し、それによって操作部12に回転抵抗を付与することができる。このため第1実施形態では、アーマチュアロータ22と回転部材20との間で相互に回転が伝達される構造を採用している。
【0050】
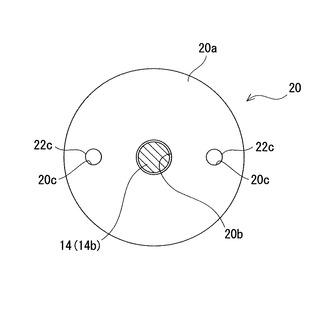
すなわちアーマチュアロータ22には、その表面(図1では上面)から突出する2つの連結突起22cが設けられている。これら連結突起22cは、いずれもアーマチュアロータ22(本体部22a)の表面から回転部材20に向けて延びている。一方、回転部材20には、2つの連結突起22cにそれぞれ対応する位置に連結孔20cが形成されている。これら連結孔20cは本体部20aをその厚み方向に貫通して延びており、それぞれ内部に連結突起22cが挿通されている。また各連結突起22cは連結孔20c内に挿通された状態で、回転部材20(本体部20a)の表面(図1では上面)からある程度突出するだけの全長を有している。
【0051】
図2は、回転部材20とアーマチュアロータ22との連結関係を示す平面図(図1中のII−II断面を含む)である。図2に示されているように、2本の連結突起22cは回転部材20の各連結孔20c内に挿通された状態にあり、この状態で回転部材20とアーマチュアロータ22との相対回転は規制されている。このため、電磁ブレーキ24によってアーマチュアロータ22を引き付けると、アーマチュアロータ22を介して回転部材20に回転方向への摩擦抵抗が付与された状態となる。ただし、上記のように連結突起22cは連結孔20c内で軸方向への移動は規制されていないため、回転軸14全体に軸方向への力が及ぶことはない。
【0052】
〔電動モータによる回転抵抗の付与〕
また第1実施形態では、電動モータ30によって回転抵抗を付与することもできる。すなわち、操作者による操作部12の回転操作の方向と反対方向に電動モータ30を駆動することで、操作部12に回転抵抗を付与することが可能である。ただしこの場合、電磁ブレーキ24に比較して消費電力は多くなる。
【0053】
上記の弾性部材15は、操作部12に回転抵抗が付与された状態で操作部12が操作されると、その回転方向にねじり変形(弾性変形)を生じる。ただし弾性部材15には、付与される回転抵抗が最大の状態で操作部12が操作されたとしても、そのときのトルクに対して充分な剛性を有する材料を用いるため、そこで弾性部材15が降伏したり、破断したりすることはない。したがって弾性部材15は、通常の弾性範囲内で変形しつつ、操作部12が受ける操作力を第1パーツ14aから第2パーツ14b及び回転部材20に伝達することができる。
【0054】
これにより、操作者がある程度の操作力を操作部12に加えると、電磁ブレーキ24に対してアーマチュアロータ22をスリップさせながら操作部12を引き続き回転させることができる。あるいは、電動モータ30により回転抵抗を付与している状態であっても、操作者がある程度の操作力を操作部12に加えると、その回転抵抗(操作方向と反対方向への自立回転力)に抗して電動モータ30を逆回転させながら、引き続き操作部12を回転させることができる。
【0055】
一方で弾性部材15は、上記のように弾性変形を生じた状態で操作者が操作部12から手を離したり、操作力を緩めたりすると、それまでの変形状態から復帰することができる。この復帰に伴い、弾性部材15は第1パーツ14aとともに操作部12及びコード板16をそれまでと逆方向へ僅かに回転させる。したがって、回転抵抗が付与された状態で操作部12が操作力を受けなくなると、操作部12の回転角度はそれまでの回転方向と逆方向へ僅かに変化する。
【0056】
〔制御系の構成〕
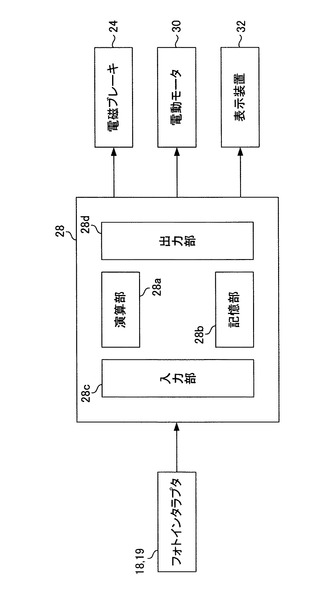
図3は、操作感触付与型入力装置10の制御系の構成を概略的に示すブロック図である。制御部28は、例えばプロセッサ(CPU)を用いた演算部28aを有する他、RAM、ROM等のメモリデバイスを用いた記憶部28b、そして入力部28c及び出力部28dを有したマイクロコンピュータとして構成されている。
【0057】
上記のフォトインタラプタ18,19から出力される回転角信号は、それぞれ入力部28cでA/D変換されて演算部28aに入力される。演算部28aは、この入力信号に基づいて回転軸14(操作部12)の回転角度及び回転方向を演算する。また演算部28aは、回転角度及び回転方向の演算結果に基づいて制御信号を出力し、電磁ブレーキ24や電動モータ30の作動状態を制御する。このとき電磁ブレーキ24に対する制御信号は、出力部28dを通じて電磁ブレーキ24に供給される駆動電流又は駆動電圧に変換される。また電動モータ30に対する制御信号は、そのときの回転方向(CCW/CW)別に出力部28dを通じて駆動電流又は駆動電圧に変換される。
【0058】
〔外部システムとの接続〕
なお第1実施形態の操作感触付与型入力装置10は、例えば外部システムとしての表示装置32に接続して利用することができる。この場合、操作感触付与型入力装置10は、その制御部28から表示装置32に対して、表示制御に関する外部出力信号を出力することができる。
【0059】
例えば、表示装置32が有する表示画面(図示していない)上に操作部12の回転位置(座標上でみた回転角度)と連動させてポインタ等を表示させる場合、制御部28はポインタの表示位置を指示するための回転角座標を外部出力信号として出力する。表示装置32は、制御部28から受け取った回転角座標に基づいて表示画面上にポインタを表示する。これにより表示装置32は、操作部12の回転角度の変化に連動してリアルタイムに表示画面上でポインタを移動させることができる。ただし、このような構成は特に必須ではなく、特に操作感触付与型入力装置10が表示装置32に接続されていなくてもよい。
【0060】
〔制御処理〕
次に図4は、制御部28(主に演算部28a)が実行する制御処理の手順例を示すフローチャートである。なお制御処理の手順は、例えば記憶部28bに制御プログラムとして記憶されている。以下、各手順に沿って説明する。
【0061】
ステップS10:先ず演算部28aは、初期設定処理を実行する。この処理では、例えばフォトインタラプタ18,19から入力された現時点での検出信号を記憶し、この状態を操作部12の初期位置に設定する。また演算部28aは、記憶部28bに予め記憶されている座標軸のデータを読み込み、この座標軸上で操作部12の初期位置を初期の回転角座標に設定する。なお座標軸は、操作部12の回転位置を回転角度(θ)で表したものである。
【0062】
ステップS20:次に演算部28aは、角度検出処理を実行する。この処理は、現在の操作部12の回転角度(回転位置)を検出するためのものである。例えば、演算部28aは各フォトインタラプタ18,19からの検出信号に基づき、先の初期設定処理で設定した初期位置から操作部12がいずれの方向へどれだけの角度だけ回転したかを検出する。そして演算部28aは、検出した回転方向及び回転角度に基づき、上記の座標軸上でみた操作部12の回転角度に対応する現在の回転角座標(θ)を演算する。
【0063】
ステップS30:次に演算部28aは、演算処理を実行する。この処理は、先の角度検出処理で演算した現在の回転角座標(θ)と予め用意されたフォースカーブとに基づき、アクチュエータ(電磁ブレーキ24、電動モータ30)により発生させる回転抵抗又は自立回転力の大きさ(自立回転力については方向も)を演算するためのものである。なおフォースカーブのプロファイルデータは、例えば予め記憶部28bに記憶させておくことができる。なおフォースカーブについては、具体例を挙げてさらに後述する。
【0064】
ステップS40:続いて演算部28aは、アクチュエータ駆動処理を実行する。この処理は、先の演算処理での演算結果に基づいてアクチュエータ(電磁ブレーキ24、電動モータ30)を作動させることにより、操作部12に回転抵抗を付与したり、自立回転力を付与したりするものである。これにより、実際に操作者が行う操作部12の操作に対して操作感触を付与することができる。
【0065】
ステップS50:そして演算部28aは、信号出力処理を実行する。この処理は、上述した外部の表示装置32に対して外部出力信号を出力するためのものである。具体的には、演算部28aは、現在の操作部12の回転角度に対応する回転角座標(θ)を外部出力信号として表示装置32に出力する。表示装置32は、この外部出力信号に基づいて表示画面32上におけるポインタ等の表示位置を制御することができる。なお、操作感触付与形入力装置10を表示装置32に接続していない場合、この信号出力処理(ステップS50)を実行する必要はない。
【0066】
電源投入後、演算部28aが上記の各処理(ステップS20〜ステップS50)を定常的に実行することにより、現在の操作部12の回転角度に対応する回転角座標(θ)がリアルタイムで演算される。また演算部28aがそのときの回転角座標(θ)に基づいてアクチュエータ(電磁ブレーキ24、電動モータ30)を駆動することにより、回転角度の変化に応じて操作部12に付与される回転抵抗や自立回転力(大きさと方向)も変化する。
【0067】
〔フォースカーブの例〕
図5は、上記の演算処理(ステップS30)において演算に用いることができるフォースカーブの第1例(図5中(A))及び第2例(図5中(B))を示した図である。以下、それぞれについて説明する。
【0068】
〔第1例:右回転時〕
図5中(A):第1例のフォースカーブは、例えば操作部12が右方向(回転軸14の上方からみて右方向)に回転する場合の制御に適用可能なプロファイルデータとして記憶部28bに記憶されている。フォースカーブが破線で示されている部分は、そこでの回転抵抗を電磁ブレーキ24により発生させることを表しており、フォースカーブが実線で示されている部分は、そこでの自立回転力を電動モータ30により発生させることを表している。また縦軸の上側は左方向への回転抵抗(FL)の大きさを表し、縦軸の下側は右方向への自立回転力(FR)の大きさを表している。
【0069】
〔区間A:θ0≦θ≦θ2〕
先ず、検出された操作部12の回転角度(θ)が座標軸上でθ0〜θ1までの間にある場合、演算部28aはフォースカーブに基づき、右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30を駆動する。これにより、操作者が特に操作しなくても、操作部12が自立的に右方向へ回転する。
【0070】
操作部12の回転角度(θ)が座標軸上でθ1の右側へ移動すると、操作部12に与えられる右方向への自立回転力は次第に減少していく。そして回転角度(θ)が座標軸上でθ2に達すると、操作部12に与えられる自立回転力は0になる。このため特に操作者が操作部12を操作しなければ、そこで操作部12は回転を停止する。なお、この区間Aにおいて操作者が操作部12を操作した場合でも同様の動作となる。
【0071】
〔区間B:θ2≦θ≦θn〕
次に、検出された操作部12の回転角度(θ)が座標軸上でθ2〜θn(ただしθn>θ2)までの間にある場合、演算部28aはフォースカーブの破線部分と実線部分のそれぞれに基づき、左方向への回転抵抗(極大値Fa)と右方向への自立回転力(極大値Fa)を操作部12に与えるべく電磁ブレーキ24と電動モータ30とを交互に駆動する。
【0072】
具体的には、先ず回転角度(θ)が座標軸上でθ2〜θ3までの間にある場合、演算部28aはフォースカーブ(破線部分)に基づき、電磁ブレーキ24により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。これにより、操作者が操作部12を回転させていくにつれて、次第に抵抗力が高まっていくような操作感触が付与されることになる。そして回転角度(θ)が座標軸上でθ3に達すると、演算部28aはそこで一気に回転抵抗の付与を解除する。これにより、操作者に対してクリック感触を付与することができる。
【0073】
さらに演算部28aはフォースカーブ(実線部分)に基づき、その瞬間から右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動を開始する。これにより、クリック感触を付与した直後にあたかも操作部12の回転が急に加速された(軽くなった)かのような操作感触が付与されることになる。なお、このとき付与される自立回転力は、検出される操作部12の回転角度(θ)が座標軸上で右方向に移動するにつれて次第に減少していく。
【0074】
この後も同様に、操作部12の回転角度(θ)が座標軸上でθ4〜θ5までの間にある場合、演算部28aはフォースカーブ(破線部分)に基づき電磁ブレーキ24により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。そして回転角度(θ)が座標軸上でθ5に達すると、演算部28aはそこで一気に回転抵抗の付与を解除し、回転角度(θ)が座標軸上でθ6に達するまでの間、フォースカーブ(実線部分)に基づいて右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動を開始する(座標軸上でθ6〜θ7,θ7〜θnまでの間も同様。)。
【0075】
〔区間C:θn≦θ≦θw〕
操作部12の回転角度(θ)が座標軸上でθnの右側へ移動すると、演算部28aはフォースカーブ(破線部分)に基づき、そこから最大値Fmaxに向けて回転抵抗を増大させるべく電磁ブレーキ24を駆動する。これにより、操作者に対して次第に操作部12の回転操作が重くなっていくかのような操作感触を付与することができる。
【0076】
そして、操作部12の回転角度(θ)が座標軸上でθwに達すると、そこで演算部28aは最大値Fmaxの回転抵抗を付与するべく電磁ブレーキ24を最大電圧(電流)で駆動する。これにより操作者に対して、あたかも操作部12の回転操作が規制されたかのような操作感触(壁に突き当たった感触)を付与することができる。
【0077】
〔第2例:左回転時〕
次に、左回転時に適用できる第2例のフォースカーブについて説明する。
図5中(B):第2例のフォースカーブは、例えば操作部12が左方向(回転軸14の上方からみて左方向)に回転する場合の制御に適用可能なプロファイルデータとして記憶部28bに記憶されている。第2例においても同様に、フォースカーブが破線で示されている部分は、そこでの回転抵抗を電磁ブレーキ24により発生させることを表しており、フォースカーブが実線で示されている部分は、そこでの自立回転力を電動モータ30により発生させることを表している。
【0078】
この場合、縦軸の上側は左方向への自立回転力(FL)の大きさを表し、縦軸の下側は右方向への回転抵抗(FR)の大きさを表している。また操作部12の回転操作に伴い、回転角度(θ)は座標軸上で左方向へ移動するものとする。
【0079】
〔区間A:θ2≦θ≦θ0〕
先ず、検出された操作部12の回転角度(θ)が座標軸上でθ0〜θ1(右から左への移動)までの間にある場合、演算部28aはフォースカーブに基づき、左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30を駆動する。これにより、操作者が特に操作しなくても、操作部12が自立的に左方向へ回転する。
【0080】
操作部12の回転角度(θ)が座標軸上でθ1の左側へ移動すると、操作部12に与えられる左方向への自立回転力は次第に減少していく。そして回転角度(θ)が座標軸上でθ2に達すると、操作部12に与えられる自立回転力は0になる。このため特に操作者が操作部12を操作しなければ、そこで操作部12は回転を停止する。なお、この区間Aにおいて操作者が操作部12を操作した場合でも同様の動作となる。
【0081】
〔区間B:θn≦θ≦θ2〕
次に、検出された操作部12の回転角度(θ)が座標軸上でθ2〜θn(ただしθ2>θn)までの間にある場合は以下となる。すなわち、演算部28aはフォースカーブの破線部分と実線部分のそれぞれに基づき、右方向への回転抵抗(極大値Fa)と左方向への自立回転力(極大値Fa)を操作部12に与えるべく電磁ブレーキ24と電動モータ30とを交互に駆動する。
【0082】
具体的には、先ず回転角度(θ)が座標軸上でθ2〜θ3までの間にある場合、演算部28aはフォースカーブ(破線部分)に基づき、電磁ブレーキ24により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。これにより、操作者が操作部12を回転させていくにつれて、次第に抵抗力が高まっていくような操作感触が付与されることになる。そして回転角度(θ)が座標軸上でθ3に達すると、演算部28aはそこで一気に回転抵抗の付与を解除する。これにより、操作者に対してクリック感触を付与することができる。
【0083】
さらに演算部28aはフォースカーブ(実線部分)に基づき、その瞬間から左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動を開始する。これにより、クリック感触を付与した直後にあたかも操作部12の回転が急に加速された(軽くなった)かのような操作感触が付与されることになる。ここでも同様に、付与される自立回転力は、検出される操作部12の回転角度(θ)が座標軸上で左方向に移動するにつれて次第に減少していく。
【0084】
この後も同様に、操作部12の回転角度(θ)が座標軸上でθ4〜θ5までの間にある場合、演算部28aはフォースカーブ(破線部分)に基づき電磁ブレーキ24により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。そして回転角度(θ)が座標軸上でθ5に達すると、演算部28aはそこで一気に回転抵抗の付与を解除し、回転角度(θ)が座標軸上でθ6に達するまでの間、フォースカーブ(実線部分)に基づいて左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動を開始する(座標軸上でθ6〜θ7,θ7〜θnまでの間も同様。)。
【0085】
〔区間C:θw≦θ≦θn〕
操作部12の回転角度(θ)が座標軸上でθnの左側へ移動すると、演算部28aはフォースカーブ(破線部分)に基づき、そこから最大値Fmaxに向けて回転抵抗を増大させるべく電磁ブレーキ24を駆動する。これにより、操作者に対して次第に操作部12の回転操作が重くなっていくかのような操作感触を付与することができる。
【0086】
そして、操作部12の回転角度(θ)が座標軸上でθwに達すると、そこで演算部28aは最大値Fmaxの回転抵抗を付与するべく電磁ブレーキ24を最大電圧(電流)で駆動する。これにより操作者に対して、あたかも操作部12の回転操作が規制された(壁に突き当たった)かのような操作感触(壁感触)を付与することができる。
【0087】
〔第1例及び第2例のまとめ〕
上述した第1例及び第2例のフォースカーブを用いてアクチュエータ(電磁ブレーキ24、電動モータ30)の作動状態を制御した場合、右回転又は左回転のいずれについても、操作部12に回転抵抗を付与する場合は電磁ブレーキ24だけが駆動されることになる。このため、電動モータ30の動力で回転抵抗を発生させる場合に比較して、より少ない電力で大きな回転抵抗を発生させることができる。特に操作部12の回転を規制する場合(壁パターン)は大きな回転抵抗を必要とするが、電磁ブレーキ24は電動モータ30に比べて変換効率がよいため、それだけ消費電力を少なくすることができる。
【0088】
一方で、アクチュエータとして電磁ブレーキ24だけでなく、電動モータ30も使用することにより、操作部12を所望の回転位置(座標軸上のθ2)まで自立的に回転させることができるし、回転操作の途中で操作部12の回転を加速するような自立回転力を付与することもできる。
【0089】
〔フォースカーブの第3例〕
次に図6は、上記の演算処理(ステップS30)において演算に用いることができるフォースカーブの第3例(図6中(A))及び第4例(図6中(B))を示した図である。これら第3,第4例は、操作部12の回転を大きく規制する場合(壁パターン時)にのみ電磁ブレーキ24を駆動し、それ以外の場合は電磁ブレーキ24を駆動せず、電動モータ30だけを駆動するものである。以下、それぞれについて説明する。
【0090】
〔第3例:右回転時〕
図6中(A):第3例のフォースカーブは、操作部12が右方向に回転する場合の制御に適用可能なプロファイルデータである。
【0091】
〔区間A:θ0≦θ≦θ2〕
先ず、検出された操作部12の回転角度(θ)が座標軸上でθ0〜θ1までの間にある場合、演算部28aはフォースカーブに基づき、右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30を駆動する。これにより、操作者が特に操作しなくても、操作部12が自立的に右方向へ回転する。
【0092】
操作部12の回転角度(θ)が座標軸上でθ1の右側へ移動すると、操作部12に与えられる右方向への自立回転力は次第に減少していく。そして回転角度(θ)が座標軸上でθ2に達すると、操作部12に与えられる自立回転力は0になる。このため特に操作者が操作部12を操作しなければ、そこで操作部12は回転を停止する。なお、この区間Aにおいて操作者が操作部12を操作した場合でも同様の動作となる。
【0093】
〔区間B:θ2≦θ≦θn〕
次に、検出された操作部12の回転角度(θ)が座標軸上でθ2〜θn(ただしθn>θ2)までの間にある場合、演算部28aはフォースカーブに基づき、左方向への回転抵抗(極大値Fa)と右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の作動状態だけを制御する。
【0094】
具体的には、先ず回転角度(θ)が座標軸上でθ2〜θ3までの間にある場合、演算部28aはフォースカーブ(上側の登り区間)に基づき、電動モータ30により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。これにより、操作者が操作部12を回転させていくにつれて、次第に抵抗力が高まっていくような操作感触が付与されることになる。そして回転角度(θ)が座標軸上でθ3に達すると、演算部28aはそこで一気に回転抵抗の付与を解除する。これにより、操作者に対してクリック感触を付与することができる。
【0095】
さらに演算部28aはフォースカーブに基づき、その瞬間から右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動力を制御する。このとき電動モータ30の回転方向は、それまでの左方向(CCW)から右方向(CW)に反転することになる。これにより、クリック感触を付与した直後にあたかも操作部12の回転が急に加速された(軽くなった)かのような操作感触が付与されることになる。また、このとき付与される自立回転力は、検出される操作部12の回転角度(θ)が座標軸上で右方向に移動するにつれて次第に減少していく。
【0096】
この後も同様に、操作部12の回転角度(θ)が座標軸上でθ4〜θ5までの間にある場合、演算部28aはフォースカーブ(次の登り区間)に基づき電動モータ30により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。そして回転角度(θ)が座標軸上でθ5に達すると、演算部28aはそこで一気に回転抵抗の付与を解除し、回転角度(θ)が座標軸上でθ6に達するまでの間、フォースカーブに基づいて右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動力を制御する(座標軸上でθ6〜θ7,θ7〜θnまでの間も同様。)。
【0097】
〔区間C:θn≦θ≦θw〕
操作部12の回転角度(θ)が座標軸上でθnの右側へ移動すると、演算部28aは電動モータ30の駆動を停止する。そして演算部28aはフォースカーブ(破線部分)に基づき、そこから最大値Fmaxに向けて回転抵抗を増大させるべく、今度は電磁ブレーキ24を駆動する。これにより、操作者に対して次第に操作部12の回転操作が重くなっていくかのような操作感触を付与することができる。
【0098】
そして、操作部12の回転角度(θ)が座標軸上でθwに達すると、そこで演算部28aは最大値Fmaxの回転抵抗を付与するべく電磁ブレーキ24を最大電圧(電流)で駆動する。これにより操作者に対して、あたかも操作部12の回転操作が規制された(壁に突き当たった)かのような操作感触(壁感触)を付与することができる。
【0099】
〔第4例:左回転時〕
図6中(B):第4例のフォースカーブは、操作部12が左方向(回転軸14の上方からみて左方向)に回転する場合の制御に適用可能なプロファイルデータである。ここでも同様に、縦軸の上側は左方向への自立回転力(FL)の大きさを表し、縦軸の下側は右方向への回転抵抗(FR)の大きさを表している。また操作部12の回転操作に伴い、回転角度(θ)は座標軸上で左方向へ移動するものとする。
【0100】
〔区間A:θ2≦θ≦θ0〕
先ず、検出された操作部12の回転角度(θ)が座標軸上でθ0〜θ1(右から左への移動)までの間にある場合、演算部28aはフォースカーブに基づき、左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30を駆動する。これにより、操作者が特に操作しなくても、操作部12が自立的に左方向へ回転する。
【0101】
操作部12の回転角度(θ)が座標軸上でθ1の左側へ移動すると、操作部12に与えられる左方向への自立回転力は次第に減少していく。そして回転角度(θ)が座標軸上でθ2に達すると、操作部12に与えられる自立回転力は0になる。このため特に操作者が操作部12を操作しなければ、そこで操作部12は回転を停止する。なお、この区間Aにおいて操作者が操作部12を操作した場合でも同様の動作となる。
【0102】
〔区間B:θn≦θ≦θ2〕
次に、検出された操作部12の回転角度(θ)が座標軸上でθ2〜θn(ただしθ2>θn)までの間にある場合、演算部28aはフォースカーブに基づき、右方向への回転抵抗(極大値Fa)と左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の作動状態だけを制御する。
【0103】
具体的には、先ず回転角度(θ)が座標軸上でθ2〜θ3までの間にある場合、演算部28aはフォースカーブ(下側の下り区間)に基づき、電動モータ30により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。これにより、操作者が操作部12を回転させていくにつれて、次第に抵抗力が高まっていくような操作感触が付与されることになる。そして回転角度(θ)が座標軸上でθ3に達すると、演算部28aはそこで一気に回転抵抗の付与を解除する。これにより、操作者に対してクリック感触を付与することができる。
【0104】
さらに演算部28aはフォースカーブに基づき、その瞬間から左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動力を制御する。このとき電動モータ30の回転方向は、それまでの右方向(CW)から左方向(CCW)に反転することになる。これにより、クリック感触を付与した直後にあたかも操作部12の回転が急に加速された(軽くなった)かのような操作感触が付与されることになる。また、このとき付与される自立回転力は、検出される操作部12の回転角度(θ)が座標軸上で左方向に移動するにつれて次第に減少していく。
【0105】
この後も同様に、操作部12の回転角度(θ)が座標軸上でθ4〜θ5までの間にある場合、演算部28aはフォースカーブ(次の下り区間)に基づき電動モータ30により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。そして回転角度(θ)が座標軸上でθ5に達すると、演算部28aはそこで一気に回転抵抗の付与を解除し、回転角度(θ)が座標軸上でθ6に達するまでの間、フォースカーブに基づいて左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動力を制御する(座標軸上でθ6〜θ7,θ7〜θnまでの間も同様。)。
【0106】
〔区間C:θw≦θ≦θn〕
操作部12の回転角度(θ)が座標軸上でθnの左側へ移動すると、演算部28aは電動モータ30の駆動を停止する。そして演算部28aはフォースカーブ(破線部分)に基づき、そこから最大値Fmaxに向けて回転抵抗を増大させるべく、今度は電磁ブレーキ24を駆動する。これにより、操作者に対して次第に操作部12の回転操作が重くなっていくかのような操作感触を付与することができる。
【0107】
そして、操作部12の回転角度(θ)が座標軸上でθwに達すると、そこで演算部28aは最大値Fmaxの回転抵抗を付与するべく電磁ブレーキ24を最大電圧(電流)で駆動する。これにより操作者に対して、あたかも操作部12の回転操作が規制された(壁に突き当たった)かのような操作感触(壁感触)を付与することができる。
【0108】
〔第4例及び第5例のまとめ〕
上述した第4例及び第5例のフォースカーブを用いてアクチュエータ(電磁ブレーキ24、電動モータ30)の作動状態を制御した場合、右回転又は左回転のいずれについても、操作部12の回転を大きく規制する場合(壁パターン)は電磁ブレーキ24だけが駆動されることになる。このため、電動モータ30の動力で回転抵抗を発生させる場合に比較して、より少ない電力で大きな回転抵抗を発生させることができる。
【0109】
なお、上記の第1〜第4では、最大値Fmaxの回転抵抗を電磁ブレーキ24のみで発生させているが、電磁ブレーキ24と合わせて電動モータ30を駆動することにより、さらに強力な回転抵抗を付与することもできる。これにより、操作部12の回転操作をより強固に規制することで、極めて明快な壁感触を付与することができる。
【0110】
〔第2実施形態〕
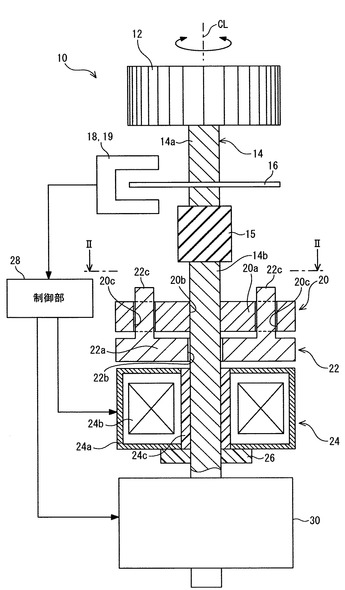
次に、第2実施形態の操作感触付与形入力装置10について説明する。図7は、第2実施形態の操作感触付与型入力装置10の全体的な構成を示す概略図である。第2実施形態では、上記の電動モータ30を超音波モータ40で構成した点が第1実施形態と大きく異なっている。その他の構成については第1実施形態と共通であり、ここでは共通の構成には図示とともに同じ符号を付し、重複した説明を省略するものとする。
【0111】
〔超音波モータの構成〕
一般的な超音波モータは、そのステータにロータを強く圧着させた状態で保持する必要があるが、第2実施形態においては、超音波モータ40のステータを摩擦部材40aと圧電素子40bとで構成している。これら摩擦部材40a及び圧電素子40bは、回転軸線CLに沿う方向に積層された状態でアーマチュアロータ22と電磁コイル24bとの間に配置されている。また、この状態で摩擦部材40aがアーマチュアロータ22に対向しており、圧電素子40bが電磁コイル24bに対向している。
【0112】
上記の超音波モータ40において、特に摩擦部材40aは、圧電素子40bの駆動時に進行波を発生させるステータとして機能するものであるが、電磁コイル24bの通電時にはアーマチュアロータ22を強く密着させることで、電磁ブレーキ24による摩擦力を発生させる部材(「摩擦部材」そのもの)としても機能する。このため第2実施形態では、超音波モータ40のステータ(特に摩擦部材40a)を電磁ブレーキ24のステータとしても利用することができ、それだけ使用する部品を少なくすることができる。
【0113】
なお第2実施形態では、回転部材20やアーマチュアロータ22を含めて電磁ブレーキ24及び超音波モータ40が1つのケース体42内に収容されている。ケース体42は、例えば中空の円柱形状をなしており、その上面には挿通孔42aが形成されており、この挿通孔42aに回転軸14(第2パーツ14b)が挿通された状態にある。なお、挿通孔42aの内径は回転軸14の外径よりも僅かに大きく、このため回転軸14はケース体42に対して回転自在である。これに対し、電磁ブレーキ24(ケース型コア24a)はケース体42に固定されているので、第2実施形態の操作感触付与型入力装置10は、ケース体42をベースとして図示しない他の装置本体等に取り付けることができる。
【0114】
次に、第2実施形態の操作感触付与型入力装置10の制御例について説明する。第2実施形態においても、そのアクチュエータ(電磁ブレーキ24及び超音波モータ40)の制御に関して制御部28を適用することができる。具体的には、図3に示される制御系の構成中、電動モータ30を超音波モータ40として制御系を構築すればよい。
【0115】
なお、フォトインタラプタ18,19を用いた操作部12の回転位置(回転角度)の検出については第1実施形態と同様である。また、演算部28aが実行する制御処理についても図4に示されるフローチャートを適用することができる。
【0116】
〔第2実施形態の特徴〕
第2実施形態では、電動モータ30に代えて超音波モータ40を用いているが、そのステータ(摩擦部材40a)が電磁ブレーキ24のステータと兼用されているため、電磁ブレーキ24を駆動してアーマチュアロータ22を摩擦部材40aに圧着させた状態でなければ、超音波モータ40を駆動することができない。そこで、以下に電磁ブレーキ24との併用時に適用可能な制御例を挙げて説明する。
【0117】
〔制御例1〕
図8は、超音波モータ40を駆動する際に出力される駆動用信号(図8中(A))と電磁ブレーキ24の駆動電圧(図8中(B))のパターンとともに、操作部12に付与される回転抵抗のフォースカーブ(図8中(C))を合わせて示した図である。なお図8中、横軸は検出された操作部12の回転角度(θ)の座標を表している。また制御例1では、操作者が操作部12を右方向に回転操作する場合を想定している。
【0118】
〔超音波モータ駆動用信号〕
図8中(A):超音波モータ40の作動状態は、圧電素子40bに印加される駆動用信号の波形に基づいて制御することができる。ここで、縦軸の上側は左方向への回転トルク(TL)の大きさを表し、縦軸の下側は右方向への回転トルク(TR)の大きさを表している。駆動用信号が縦軸の上下いずれかに変化すると、そのときの振幅と時間に応じて摩擦部材40aに進行波が発生し、このとき進行波の回転方向と逆向きにアーマチュアロータ22を回転させようとするトルクが発生する。
【0119】
制御例1の波形パターンでは、検出された操作部12の回転角度(θ)が座標軸上で所定角度P3に達するまでの間、特に駆動用信号が出力されていない。このため、この間は特に超音波モータ40は回転しない。
【0120】
〔区間S:P3≦θ≦θ4〕
この後、操作部12の回転角度(θ)が座標軸上でP3より右側に移動すると、所定角度θ4に達するまでの間に駆動用信号が上下に周期的に変化している。この場合、駆動用信号の波形に応じて超音波モータ40が左右方向への回転トルクを周期的に発生させる。
【0121】
〔電磁ブレーキ駆動電圧〕
図8中(B):電磁ブレーキ24の作動状態は、上記のように電磁コイル24bに印加される駆動電圧(電流)に基づいて制御することができるので、駆動電圧の波形は電磁ブレーキ24により発生する回転抵抗のフォースカーブに相当する。なお、縦軸の上側は、左方向への回転抵抗の大きさを表している。
【0122】
この制御例1では、操作部12の回転角度(θ)が座標軸上でθ1〜P1までの間にある場合、演算部28aは次第に電磁コイル24bに対する駆動電圧を増加させている。そして、回転角度(θ)が座標軸上でP1に達すると、駆動電圧は極大値Vaに達する。そこからさらに回転角度(θ)が座標軸上で右側へ移動すると、演算部28aは駆動電圧を次第に減少させていき、回転角度(θ)がP2に達すると、駆動電圧は0Vになる。
【0123】
続いて、操作部12の回転角度(θ)が座標軸上でθ2〜P2までの間にある場合、再び演算部28aは次第に電磁コイル24bに対する駆動電圧を増加させる。そして、回転角度(θ)が座標軸上でP2に達すると、駆動電圧は極大値Vaに達する。そこからさらに回転角度(θ)が座標軸上で右側へ移動すると、演算部28aは駆動電圧を次第に減少させていき、回転角度(θ)がP3に達すると駆動電圧は0Vになる。以下、θ3〜P3、P3〜θ4の間でも同様である。
【0124】
〔操作部の回転抵抗〕
図8中(C):アクチュエータとして電磁ブレーキ24と超音波モータ40とを併用した場合、実際に操作部12に付与される操作感触は、両者の出力を合成したものとなる。
【0125】
〔θ1〜P3までの間〕
操作者が操作部12を連続をして右方向へ回転させていくとき、回転角度(θ)が座標軸上でP3に達するまでの間は超音波モータ40が作動していないので、この間は電磁ブレーキ24による回転抵抗だけが付与される。この場合、回転角度(θ)が座標軸上でθ1に達すると、そこから次第に回転抵抗が大きくなっていき、やがて回転角度(θ)がP1に達すると、そこで回転抵抗は極大となる。そして、回転角度(θ)がP1を超えると回転抵抗が減少していくので、このとき操作者に対してクリック感触を付与することができる。
【0126】
なお、以上の操作感触は回転角度(θ)が座標軸上でθ2〜θ3までの間を移動する場合についても同様であり、回転角度(θ)が座標軸上でP2を超えたところでクリック感触を発生させることができる。
【0127】
〔区間S:でこぼこ感触〕
上記の区間S(P3〜θ4)では、電磁ブレーキ24とともに超音波モータ40が作動するため、この間の操作感触は、両者の出力を重ね合わせたものとなる。具体的には、電磁ブレーキ24による回転抵抗のフォースカーブに超音波モータ40によるトルク波形が重畳されたような形となって現れる。ただし、超音波モータ40のトルクは単純に駆動用信号の波形だけでなく、電磁ブレーキ24に対する駆動電圧にも依存する。なぜなら、電磁ブレーキ24の吸着力が弱くなると、それに伴ってステータ(摩擦部材40a)とアーマチュアロータ22との圧着力が低下するため、その分、トルクが目減りするからである。
【0128】
ただし、電磁ブレーキ24とともに超音波モータ40を駆動することで、区間Sでは操作部12に回転抵抗を付与するだけでなく、その間に操作部12が回転方向(ここでは右方向)へ自立的に回転する力を発生しているかのような感触を付与することができる。また、回転抵抗は電磁ブレーキ24によるフォースカーブだけのようになだらかに変化せず、周期的に細かくエッジが立ったかのような引っかかり感触となって現れる。その結果、自動車のステアリングホイールに喩えると、自動車がでこぼこ道を走行中に路面からの反力であたかもステアリングホイールが細かく揺さぶられているかのような操作感触を発生させることができる。
【0129】
〔制御例2〕
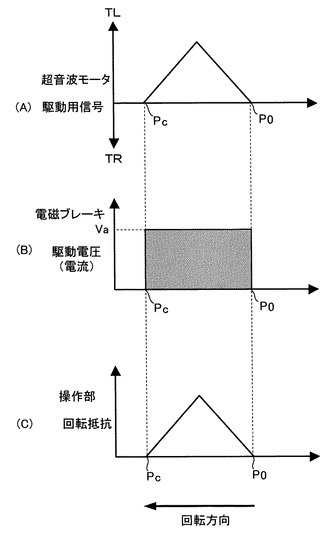
図9は、主に超音波モータ40によって自立回転力を付与する場合の駆動用信号と電磁ブレーキ24の駆動電圧のパターンとを示した図である。なお、図9では操作部12を左方向(座標軸上のP0からPcへ左方向)に自立回転させる場合を想定している。
【0130】
図9中(A):例えば、操作部12の現在の回転角度(θ)が座標軸上のP0より僅かに左側にある場合、超音波モータ40の駆動用信号が0より僅かに大きくなる。
【0131】
図9中(B):このとき、電磁ブレーキ24には最大駆動電圧Vaが印加されている。なお、電磁ブレーキ24には超音波モータ40による自立回転中(座標軸上でP0〜Pcの区間)、継続して最大駆動電圧Vaが印加される。
【0132】
図9中(C):その結果、操作部12には超音波モータ40の駆動用信号の波形に応じた自立回転力が付与される。これにより、操作部12は座標軸上の所定位置P0から基準位置Pcに向けて自立的に回転する。この間、操作部12は始め低速で回転し、その後に回転速度を増すと中間点から減速し、最後は極低速で基準位置Pcに停止する。これにより、例えば操作者が操作部12を所定位置P0で手を離した場合であっても、操作部12を基準位置Pcへ強制的に復帰させることができる。
【0133】
第2実施形態の操作感触付与型入力装置10によれば、アクチュエータとして超音波モータ40を使用しても、アーマチュアロータ22とステータ(摩擦部材40a)との圧着力を電磁ブレーキ24によって得ているため、非作動時にまでアーマチュアロータ22をステータに圧着させておく必要がない。また、電磁ブレーキ24を非作動にすれば超音波モータ40も作動可能な状態にならず、アーマチュアロータ22とステータとの間に摩擦が働かないので、超音波モータ40を用いていてもスムーズな操作部12の回転操作を実現することができる。
【0134】
上述した各実施形態に操作感触付与型入力装置10によれば、電磁ブレーキ24と電動モータ30又は超音波モータ40とを併用することにより、より大きな回転抵抗を少ない電力で得ることができる上、自立的に操作部12を回転させることができる。また、回転抵抗の付与と合わせて自立回転力を付与することができるため、単純にいずれか一方だけを付与する場合と比較して、より多様性に富んだ操作感触の付与パターンを実現することができる。
【0135】
なお、第1実施形態で挙げたフォースカーブは、第2実施形態の構造においても適用することができる。また、各実施形態で挙げたフォースカーブや波形パターンは図示とともに挙げた例に限らず、その他のパターンを採用してもよい。
【0136】
また、回転状態の検出はコード板16とフォトインタラプタ18,19との組み合わせだけでなく、例えば反射板とフォトスイッチとの組み合わせで実現してもよい。
【0137】
なお、上述した実施形態では、操作部が回転操作されるものを例示したが、例えば操作部としてスライド操作等の他の移動形態を有するものにも本発明を適用することが可能である。この場合、例えば往復移動式のアクチュエータ(リニアアクチュエータ等)を用いて操作部を自立的にスライド移動させるとともに、操作部の移動状態(座標)をエンコーダ等で検出し、その検出結果に基づきアクチュエータの作動状態を制御すればよい。
【0138】
また、上述した実施形態では、アクチュエータとして電気を動力源とした電動モータおよび電磁ブレーキを例示したが、例えば油圧や空圧等の他のエネルギーを動力源としたモータやブレーキを用いてもよい。
【0139】
その他、図示とともに示した各種部材の形状や配置はいずれも好ましい例であり、本発明の実施に際してこれらを適宜変更可能であることはいうまでもない。
【符号の説明】
【0140】
10 操作感触付与型入力装置
12 操作部
14 回転軸
16 コード板
18,19 フォトインタラプタ
20 回転部材
22 アーマチュアロータ
24 電磁ブレーキ
28 制御部
28a 演算部
28d 出力部
30 電動モータ
40 超音波モータ
40a 摩擦部材
40b 圧電素子
【技術分野】
【0001】
本発明は、各種の電子機器や車載電装品等の入力デバイスとして利用することができ、その際、操作者に力学的な操作感触を付与することができる操作感触付与型入力装置に関する。
【背景技術】
【0002】
この種の操作感触付与型入力装置に関して、操作部に操作感触を付与するアクチュエータとして回転モータを用いるものや(例えば、特許文献1参照。)、電磁ブレーキを用いるもの(例えば、特許文献2参照。)が先行技術として知られている。
【0003】
前者の先行技術は、回転モータの出力によって操作部を自立的に回転させることができるため、その回転力の方向を適宜切り替えることで、例えば操作者の回転操作と反対方向に回転抵抗を発生させることもできるし、回転操作と同じ方向に自立回転力を発生させることもできる。また、操作者が操作を止めた(操作部から手を離した)状態でも、自立回転力によって操作部を所望の回転位置(原点位置等)まで復帰させることもできる。
【0004】
一方で後者の先行技術は、電磁ブレーキによる摩擦で回転抵抗を発生させることはできるものの、その動作はあくまで受動的であり、操作部を自立的に回転させることはできない。ただし電磁ブレーキは、摩擦を利用して大きな回転抵抗を発生させることができるため、回転モータに比べて電力の変換効率に優れるという利点がある。例えば、操作部の回転をある特定の位置で規制しようとする場合(いわゆる壁感触を付与する場合)、電磁ブレーキは回転モータに比較して電力の消費が少ないという利点がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−251845号公報
【特許文献2】特開2005−28510号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記のように、操作部を自立的に回転させるためには、アクチュエータに回転モータを使用する必要がある。この場合、操作部に回転抵抗を発生させることもできるし、自立的に回転させることもできるが、より少ない電力で大きな回転抵抗を発生させることには向かない。これに対し、電磁ブレーキを用いた場合はより少ない電力で大きな回転抵抗を発生することができるものの、操作部を自立的に回転させることはできなくなる。
【0007】
そこで本発明は、より少ない電力で大きな回転抵抗を発生させることができ、合わせて自立的な回転力を発生させることができる操作感触付与型入力装置を提供しようとするものである。
【課題を解決するための手段】
【0008】
解決手段1:本発明は、操作者により回転操作される操作部と、操作部の回転状態を検出して出力する回転状態検出手段と、操作部への回転操作に対する回転抵抗又は操作部を自立的に回転させる自立回転力の少なくとも一方を操作部に与えるアクチュエータと、回転状態検出手段からの出力に基づき算出した操作部の回転位置とその回転方向に基づきアクチュエータの作動状態を制御する制御手段とを備えた操作感触付与型入力装置である。
【0009】
その上で本発明におけるアクチュエータは、操作部とともに回転するロータ部材を操作部とともに回転しない状態に固定されたステータ部材に圧着させて回転抵抗を発生させるブレーキ手段と、操作部を回転させて自立回転力を発生させるモータ手段とから構成されている。
【0010】
上記のように本発明では、アクチュエータをブレーキ手段とモータ手段の2つの駆動源から構成することができる。このため、アクチュエータは操作部に回転抵抗を発生させる場合、ブレーキ手段又はモータ手段のいずれを用いてもよい(両方を用いてもよい)が、特に大きな回転抵抗を発生させる場合は主にブレーキ手段を活用することで、全体として消費電力を少なく抑えることができる。またモータ手段を活用すれば、所望の回転位置まで操作部を自立的に回転させることができる。
【0011】
またアクチュエータは、ブレーキ手段だけで回転抵抗を発生させることもできるし、あるいは、モータ手段だけで回転抵抗を発生させることもできる。さらに、モータ手段とブレーキ手段とを協働させて(パラレルに)回転抵抗を発生させることもできるので、必要に応じてより強力な回転抵抗を発生することができる。
【0012】
さらにアクチュエータは、ブレーキ手段により回転抵抗を発生させながら、同時にモータ手段によって自立回転力を発生させることもできる。この場合、操作者には自分の操作に対する適度な抵抗感触を付与しつつ、その間に操作部があたかも自立的に回転していくことがあるかのような感触を与えることができる。これにより、回転抵抗の発生を主にブレーキ手段で賄うことで消費電力を少なく抑えながら、自立回転力を発生可能なモータ手段を合わせて使用することで、より多様な操作感触の付与を実現することができる。
【0013】
解決手段2:解決手段1の操作感触付与型入力装置において、制御手段は、操作部に対する回転操作の方向と反対方向の回転抵抗を発生させる場合はブレーキ手段を作動させ、操作部に対する回転操作の方向と同じ方向の自立回転力を発生させる場合はモータ手段を作動させることができる。
【0014】
この場合、回転抵抗の発生をブレーキ手段だけで賄えるので、より少ない電力で大きな回転抵抗を発生させることができるし、操作部を自立回転力によって回転させることもできるので、ある一方向への回転操作中に操作部の回転が加速した(軽くなった)かのような操作感触を付与することができる。
【0015】
解決手段3:解決手段1の操作感触付与型入力装置において、制御手段は、操作部に対する回転操作が一方向に連続して行われる場合、回転状態検出手段からの出力に基づいて算出した回転位置が所定位置に達するまでの間はモータ手段のみを作動させて操作部に対する回転操作の方向と反対方向への回転抵抗又は操作部に対する回転操作の方向と同じ方向への自立回転力のいずれかを発生させ、算出した回転位置が所定位置に達するとブレーキ手段のみを作動させて操作部に対する回転操作の方向と反対方向への回転抵抗を発生させることもできる。
【0016】
この場合、操作部の回転位置が所定位置に達するまでの間、モータ手段だけを作動させて操作感触を付与することができるので、それだけ制御を容易に行うことができる。一方、操作部が所定位置まで回転すると、そこから一気にブレーキ手段を作動させて回転抵抗を付与することができるので、より少ない電力で大きな抵抗感触を与えることができる。
【0017】
解決手段4:あるいは、解決手段1の操作感触付与型入力装置において、アクチュエータは、操作部とともに回転しつつ、その回転軸線に沿う方向に移動可能に配置された磁性金属からなるアーマチュアロータと、アーマチュアロータを回転軸線に沿う方向へ吸着する電磁コイルと、アーマチュアロータと電磁コイルとの間に配置され、回転軸線に沿う方向でみてアーマチュアロータに対向する摩擦部材と電磁コイルに対向する圧電素子とを重ね合わせて構成されたステータとからなる態様であってもよい。
【0018】
この場合、制御手段は、電磁コイルにのみ通電した状態でアクチュエータをブレーキ手段(電磁的なブレーキ)として機能させる一方、電磁コイル及び圧電素子の両方に通電した状態ではアクチュエータを超音波モータとして機能させることができる。
【0019】
上記の構成であれば、ブレーキ手段のアーマチュアロータを超音波モータのロータとしても利用できる上、超音波モータのステータをブレーキ手段のステータ(特に摩擦部材)としても利用することができる。このため、アクチュエータをモータ手段とブレーキ手段とで構成する場合でも、それぞれの部品点数を少なくすることができる。
【0020】
また一般的な超音波モータは、ステータの表面に生じる進行波を利用してロータを回転させるものであるから、その構造上、ロータをステータに対して常時強く密着させておく必要がある。このため、単純にブレーキ手段(電磁的なブレーキ)と超音波モータとを2つ併用しただけでは、超音波モータの非作動時にもロータとステータとの間には強い摩擦が存在するため、操作部に回転抵抗を付与したくない場合でも回転抵抗が生じてしまう。これを取り除くには、さらに別の機構的手段(例えばクラッチ機構等)を設ける必要があり、それだけ構造が複雑化してしまう。
【0021】
この点、解決手段4の構成では、ブレーキ手段のロータをアーマチュアロータとし、これをブレーキ手段の作動時にのみ生じる吸着力でステータに圧着させるため、ブレーキ手段を作動させない限り、アーマチュアロータとステータとの間に摩擦は発生しない。したがって、ブレーキ手段を非作動にすれば超音波モータも作動可能な状態にならないので、特に別の機構的手段を設けなくても、必要な場合にだけ回転抵抗を発生させることができる。
【0022】
解決手段5:また本発明は、以下の構成であってもよい。すなわち本発明の操作感触付与型入力装置は、操作者により移動操作される操作部と、操作部の移動状態を検出して出力する移動状態検出手段と、操作部への移動操作に対する移動抵抗又は操作部を自立的に移動させる自立移動力の少なくとも一方を操作部に与えるアクチュエータと、移動状態検出手段からの出力に基づき算出した操作部の移動位置とその移動方向に基づきアクチュエータの作動状態を制御する制御手段とを備える。そしてアクチュエータは、操作部とともに移動する移動部材を操作部とともに移動しない状態に固定されたステータ部材に圧着させて移動抵抗を発生させるブレーキ手段と、操作部を移動させて自立移動力を発生させるモータ手段とから構成される。
【0023】
この場合でも、アクチュエータは操作部に移動抵抗を発生させる場合、ブレーキ手段又はモータ手段のいずれを用いてもよい(両方を用いてもよい)が、特に大きな移動抵抗を発生させる場合は主にブレーキ手段を活用することで、全体として消費電力を少なく抑えることができる。またモータ手段を活用すれば、所望の位置まで操作部を自立的に移動させることができる。
【0024】
またアクチュエータは、ブレーキ手段だけで移動抵抗を発生させることもできるし、あるいは、モータ手段だけで移動抵抗を発生させることもできる。さらに、モータ手段とブレーキ手段とを協働させて(パラレルに)移動抵抗を発生させることもできるので、必要に応じてより強力な移動抵抗を発生することができる。
【0025】
さらにアクチュエータは、ブレーキ手段により移動抵抗を発生させながら、同時にモータ手段によって自立移動力を発生させることもできる。この場合、操作者には自分の操作に対する適度な抵抗感触を付与しつつ、その間に操作部があたかも自立的に移動していくことがあるかのような感触を与えることができる。これにより、移動抵抗の発生を主にブレーキ手段で賄うことで消費電力を少なく抑えながら、自立移動力を発生可能なモータ手段を合わせて使用することで、より多様な操作感触の付与を実現することができる。
【0026】
解決手段6:解決手段5において、制御手段は、操作部に対する移動操作の方向と反対方向の移動抵抗を発生させる場合はブレーキ手段を作動させ、操作部に対する移動操作の方向と同じ方向の自立移動力を発生させる場合はモータ手段を作動させる。
【0027】
この場合、移動抵抗の発生をブレーキ手段だけで賄えるので、より少ない電力で大きな移動抵抗を発生させることができるし、操作部を自立移動力によって移動させることもできるので、ある方向への移動操作中に操作部の移動が加速した(軽くなった)かのような操作感触を付与することができる。
【0028】
解決手段7:あるいは解決手段5において、制御手段は、操作部に対する移動操作が一方向に連続して行われる場合、移動状態検出手段からの出力に基づいて算出した移動位置が所定位置に達するまでの間はモータ手段のみを作動させて操作部に対する移動操作の方向と反対方向への移動抵抗又は操作部に対する移動操作の方向と同じ方向への自立移動力のいずれかを発生させ、算出した移動位置が所定位置に達するとブレーキ手段のみを作動させて操作部に対する移動操作の方向と反対方向への移動抵抗を発生させてもよい。
【0029】
この場合、操作部の移動位置が所定位置に達するまでの間、モータ手段だけを作動させて操作感触を付与することができるので、それだけ制御を容易に行うことができる。一方、操作部が所定位置まで移動すると、そこから一気にブレーキ手段を作動させて移動抵抗を付与することができるので、より少ない電力で大きな抵抗感触を与えることができる。
【発明の効果】
【0030】
本発明の操作感触付与型入力装置は、より少ない消費電力で大きな回転抵抗を付与することができる上、操作部を自立回転させることができる。また、アクチュエータが回転抵抗と自立回転力を同時に発生させることができるので、より多様な操作感触を付与することができる。
【0031】
また本発明の操作感触付与型入力装置は、より少ない消費電力で大きな移動抵抗を付与することができる上、操作部を自立移動させることができる。また、アクチュエータが移動抵抗と自立移動力を同時に発生させることができるので、より多様な操作感触を付与することができる。
【図面の簡単な説明】
【0032】
【図1】第1実施形態の操作感触付与型入力装置の全体的な構成を示す概略図である。
【図2】回転部材と摩擦板との連結関係を示す平面図(図1中のII−II断面を含む)である。
【図3】操作感触付与型入力装置の制御系の構成を概略的に示すブロック図である。
【図4】制御部(演算部)が実行する制御処理の手順例を示すフローチャートである。
【図5】演算処理において演算に用いることができるフォースカーブの第1例及び第2例を示した図である。
【図6】演算処理において演算に用いることができるフォースカーブの第3例及び第4例を示した図である。
【図7】第2実施形態の操作感触付与型入力装置の全体的な構成を示す概略図である。
【図8】超音波モータを駆動する際に出力される駆動用信号と電磁ブレーキの駆動電圧のパターンとともに、操作部に付与される回転抵抗のフォースカーブを合わせて示した図である。
【図9】主に超音波モータによって自立回転力を付与する場合の駆動用信号と電磁ブレーキ24の駆動電圧のパターンとを示した図である。
【発明を実施するための形態】
【0033】
以下、本発明の実施形態について図面を参照しながら説明する。本発明の操作感触付与型入力装置は、例えば、各種の電子機器(コンピュータ機器、オーディオ機器、ビデオ機器)をはじめ、カーナビゲーション装置等の車載電装品用の入力デバイス(ユーザインタフェース)として利用することができる。
【0034】
〔第1実施形態〕
図1は、第1実施形態の操作感触付与型入力装置10の全体的な構成を示す概略図である。図1中、操作感触付与型入力装置10の機械的な構成は、その大部分が縦断面により示されている。また図1中、操作感触付与型入力装置10の電気的な構成はブロック要素として示されている。
【0035】
〔操作部〕
操作感触付与型入力装置10は操作部12を備えており、この操作部12は、例えば回転式のつまみ形状(ダイヤル形状)をなしている。操作者は操作部12をつまんだ状態で回転操作することができ、このとき操作部12は図中に一点鎖線で示される回転軸線CLの回りに回転する。
【0036】
操作部12は、例えば回転軸14の一端に連結されている。この回転軸14は上記の回転軸線CLに沿って操作部12から一方向(図1中の下方向)に延びており、回転軸14は操作部12とともに回転軸線CLの回りに回転する。
【0037】
なお回転軸14には、その軸方向の途中に弾性部材15が介挿して設けられている。このため回転軸14は、弾性部材15を挟んで軸方向に第1パーツ14aと第2パーツ14bとに分割された構造を有している。なお、弾性部材15と第1パーツ14a、第2パーツ14bとは、それぞれの接合部で強固に接合されている。また弾性部材15には、例えば材料としてゴムを使用することができる。
【0038】
〔回転状態の検出〕
回転軸14(第1パーツ14a)の外周には、被検出体であるコード板16が取り付けられている。このコード板16は回転軸14を中心とした薄板の円盤形状をなしており、その周方向には一定ピッチで図示しないスリットが形成されている。またコード板16の外周部には、回転方向の原点位置を基点として周方向に図示しないインデックス(遮光部)が形成されている。
【0039】
回転軸14の近傍位置には、検出部として例えば2つのフォトインタラプタ18,19が設置されており、これらフォトインタラプタ18,19は、それぞれ検出光が互いに異なる位置でコード板16のスリットを透過する関係に調整されている。操作部12が回転操作されると、これに伴って回転軸14とともにコード板16が回転し、2つのフォトインタラプタ18,19から互いに位相差を持った回転角信号(エンコーダパルス)が出力される。なおフォトインタラプタ18,19は、これらが一体化されたパルスエンコーダでもよい。
【0040】
また回転軸14には、例えば第2パーツ14bの軸方向でみた中央付近に回転部材20が取り付けられている。回転部材20は、例えば円盤形状の本体部20aを有しており、この本体部20aは回転軸14(第2パーツ14b)を中心としてラジアル方向に拡がっている。本体部20aの中央位置には貫通孔20bが形成されており、この貫通孔20bは本体部20aを厚み方向に貫通して形成されている。そして回転部材20は、貫通孔20bの内部に回転軸14(第2パーツ14b)を挿通させた状態で回転軸14に固定されている。このため回転部材20は、操作部12が操作されると回転軸14とともに回転軸線CLの回りに回転する。
【0041】
〔アーマチュアロータ〕
また回転軸14には、回転軸線CLに沿う方向でみて回転部材20に隣接する位置にアーマチュアロータ22が取り付けられている。このアーマチュアロータ22もまた、例えば円盤形状の本体部22aを有するとともに、その中央位置には挿通孔22bが形成されている。アーマチュアロータ22の挿通孔22bもまた本体部22aを厚み方向に貫通しているが、その内径は回転軸14の外径よりもわずかに大きい。このためアーマチュアロータ22は回転軸14(第2パーツ14b)に対して固定されておらず、回転軸14や回転部材20に対しては回転軸線CLの回りに相対回転が可能な状態で支持されている。
【0042】
またアーマチュアロータ22は、挿通孔22b内に回転軸14(第2パーツ14b)を挿通させた状態で、中心軸線CLに沿う方向へ僅かに変位可能である。なお回転軸14の外周面と挿通孔22bの内周面との間には、例えば回転軸14に沿ってスライド自在な軸受(図示していない)が設けられていてもよい。またアーマチュアロータ22は、その全体が磁性金属(例えば鉄)で構成されている。
【0043】
〔電磁ブレーキ(ブレーキ手段)〕
第1実施形態の操作感触付与型入力装置10は、アクチュエータの構成要素として電磁ブレーキ24を備えている。この電磁ブレーキ24は、例えば中空の円柱形状をなすケース型コア24aを有しており、このケース型コア24aの内部にフープ状の巻線24b(電磁コイル)を配置した構造である。ケース型コア24aの中央には例えば樹脂製の軸受24cが設けられており、回転軸14の他端部(図1でみて下端部)はこの軸受24cを介してケース型コア24aに回転自在に支持されている。電磁ブレーキ24は、巻線24bに通電された状態でケース型コア24aに電磁力を発生させ、上記のアーマチュアロータ22をスラスト方向に吸着することができる。
【0044】
なお、回転軸14の他端(第2パーツ14b)はケース型コア24aを貫通して回転部材20やアーマチュアロータ22と反対方向(図1でみて下方向)へ突出しており、この突出位置で回転軸14(第2パーツ14b)にはフランジ形状のストッパ26が取り付けられている。このストッパ26は、ケース型コア24aに対して回転軸14がその軸方向(図1で上方向)へずれるのを防止している。
【0045】
〔電動モータ(モータ手段)〕
また第1実施形態の操作感触付与型入力装置10は、アクチュエータの構成要素として上記の電磁ブレーキ24とは別に電動モータ30を備えている。第1実施形態において、電動モータ30は例えばDCモータである。電動モータ30は、その出力軸が回転軸14(第2パーツ14b)と一体化されているか、もしくは回転軸14と同軸に連結されている。
【0046】
ここでは特に図示していないが、電磁ブレーキ24及び電動モータ30は、それぞれ別の装置本体や、操作感触付与型入力装置10を収容する筐体に固定されている。このため操作部12が回転操作されても、それによって電磁ブレーキ24や電動モータ30が連れ回りすることはない。
【0047】
また操作感触付与型入力装置10は制御部28を備えており、この制御部28にはフォトインタラプタ18,19や電磁ブレーキ24、電動モータ30が接続されている。なお、制御部28を中心とした制御系の構成についてはさらに後述する。
【0048】
〔自立回転力の付与〕
操作感触付与型入力装置10は、アクチュエータを構成する電動モータ30に通電することで、その駆動力により回転軸14を回転させ、操作部12に自立的な回転力(自立回転力)を付与することができる。
【0049】
〔回転抵抗の付与〕
また操作感触付与型入力装置10は、上記の電磁ブレーキ24に通電することでアーマチュアロータ22を引き付け、アーマチュアロータ22を介して回転部材20に摩擦抵抗を付与し、それによって操作部12に回転抵抗を付与することができる。このため第1実施形態では、アーマチュアロータ22と回転部材20との間で相互に回転が伝達される構造を採用している。
【0050】
すなわちアーマチュアロータ22には、その表面(図1では上面)から突出する2つの連結突起22cが設けられている。これら連結突起22cは、いずれもアーマチュアロータ22(本体部22a)の表面から回転部材20に向けて延びている。一方、回転部材20には、2つの連結突起22cにそれぞれ対応する位置に連結孔20cが形成されている。これら連結孔20cは本体部20aをその厚み方向に貫通して延びており、それぞれ内部に連結突起22cが挿通されている。また各連結突起22cは連結孔20c内に挿通された状態で、回転部材20(本体部20a)の表面(図1では上面)からある程度突出するだけの全長を有している。
【0051】
図2は、回転部材20とアーマチュアロータ22との連結関係を示す平面図(図1中のII−II断面を含む)である。図2に示されているように、2本の連結突起22cは回転部材20の各連結孔20c内に挿通された状態にあり、この状態で回転部材20とアーマチュアロータ22との相対回転は規制されている。このため、電磁ブレーキ24によってアーマチュアロータ22を引き付けると、アーマチュアロータ22を介して回転部材20に回転方向への摩擦抵抗が付与された状態となる。ただし、上記のように連結突起22cは連結孔20c内で軸方向への移動は規制されていないため、回転軸14全体に軸方向への力が及ぶことはない。
【0052】
〔電動モータによる回転抵抗の付与〕
また第1実施形態では、電動モータ30によって回転抵抗を付与することもできる。すなわち、操作者による操作部12の回転操作の方向と反対方向に電動モータ30を駆動することで、操作部12に回転抵抗を付与することが可能である。ただしこの場合、電磁ブレーキ24に比較して消費電力は多くなる。
【0053】
上記の弾性部材15は、操作部12に回転抵抗が付与された状態で操作部12が操作されると、その回転方向にねじり変形(弾性変形)を生じる。ただし弾性部材15には、付与される回転抵抗が最大の状態で操作部12が操作されたとしても、そのときのトルクに対して充分な剛性を有する材料を用いるため、そこで弾性部材15が降伏したり、破断したりすることはない。したがって弾性部材15は、通常の弾性範囲内で変形しつつ、操作部12が受ける操作力を第1パーツ14aから第2パーツ14b及び回転部材20に伝達することができる。
【0054】
これにより、操作者がある程度の操作力を操作部12に加えると、電磁ブレーキ24に対してアーマチュアロータ22をスリップさせながら操作部12を引き続き回転させることができる。あるいは、電動モータ30により回転抵抗を付与している状態であっても、操作者がある程度の操作力を操作部12に加えると、その回転抵抗(操作方向と反対方向への自立回転力)に抗して電動モータ30を逆回転させながら、引き続き操作部12を回転させることができる。
【0055】
一方で弾性部材15は、上記のように弾性変形を生じた状態で操作者が操作部12から手を離したり、操作力を緩めたりすると、それまでの変形状態から復帰することができる。この復帰に伴い、弾性部材15は第1パーツ14aとともに操作部12及びコード板16をそれまでと逆方向へ僅かに回転させる。したがって、回転抵抗が付与された状態で操作部12が操作力を受けなくなると、操作部12の回転角度はそれまでの回転方向と逆方向へ僅かに変化する。
【0056】
〔制御系の構成〕
図3は、操作感触付与型入力装置10の制御系の構成を概略的に示すブロック図である。制御部28は、例えばプロセッサ(CPU)を用いた演算部28aを有する他、RAM、ROM等のメモリデバイスを用いた記憶部28b、そして入力部28c及び出力部28dを有したマイクロコンピュータとして構成されている。
【0057】
上記のフォトインタラプタ18,19から出力される回転角信号は、それぞれ入力部28cでA/D変換されて演算部28aに入力される。演算部28aは、この入力信号に基づいて回転軸14(操作部12)の回転角度及び回転方向を演算する。また演算部28aは、回転角度及び回転方向の演算結果に基づいて制御信号を出力し、電磁ブレーキ24や電動モータ30の作動状態を制御する。このとき電磁ブレーキ24に対する制御信号は、出力部28dを通じて電磁ブレーキ24に供給される駆動電流又は駆動電圧に変換される。また電動モータ30に対する制御信号は、そのときの回転方向(CCW/CW)別に出力部28dを通じて駆動電流又は駆動電圧に変換される。
【0058】
〔外部システムとの接続〕
なお第1実施形態の操作感触付与型入力装置10は、例えば外部システムとしての表示装置32に接続して利用することができる。この場合、操作感触付与型入力装置10は、その制御部28から表示装置32に対して、表示制御に関する外部出力信号を出力することができる。
【0059】
例えば、表示装置32が有する表示画面(図示していない)上に操作部12の回転位置(座標上でみた回転角度)と連動させてポインタ等を表示させる場合、制御部28はポインタの表示位置を指示するための回転角座標を外部出力信号として出力する。表示装置32は、制御部28から受け取った回転角座標に基づいて表示画面上にポインタを表示する。これにより表示装置32は、操作部12の回転角度の変化に連動してリアルタイムに表示画面上でポインタを移動させることができる。ただし、このような構成は特に必須ではなく、特に操作感触付与型入力装置10が表示装置32に接続されていなくてもよい。
【0060】
〔制御処理〕
次に図4は、制御部28(主に演算部28a)が実行する制御処理の手順例を示すフローチャートである。なお制御処理の手順は、例えば記憶部28bに制御プログラムとして記憶されている。以下、各手順に沿って説明する。
【0061】
ステップS10:先ず演算部28aは、初期設定処理を実行する。この処理では、例えばフォトインタラプタ18,19から入力された現時点での検出信号を記憶し、この状態を操作部12の初期位置に設定する。また演算部28aは、記憶部28bに予め記憶されている座標軸のデータを読み込み、この座標軸上で操作部12の初期位置を初期の回転角座標に設定する。なお座標軸は、操作部12の回転位置を回転角度(θ)で表したものである。
【0062】
ステップS20:次に演算部28aは、角度検出処理を実行する。この処理は、現在の操作部12の回転角度(回転位置)を検出するためのものである。例えば、演算部28aは各フォトインタラプタ18,19からの検出信号に基づき、先の初期設定処理で設定した初期位置から操作部12がいずれの方向へどれだけの角度だけ回転したかを検出する。そして演算部28aは、検出した回転方向及び回転角度に基づき、上記の座標軸上でみた操作部12の回転角度に対応する現在の回転角座標(θ)を演算する。
【0063】
ステップS30:次に演算部28aは、演算処理を実行する。この処理は、先の角度検出処理で演算した現在の回転角座標(θ)と予め用意されたフォースカーブとに基づき、アクチュエータ(電磁ブレーキ24、電動モータ30)により発生させる回転抵抗又は自立回転力の大きさ(自立回転力については方向も)を演算するためのものである。なおフォースカーブのプロファイルデータは、例えば予め記憶部28bに記憶させておくことができる。なおフォースカーブについては、具体例を挙げてさらに後述する。
【0064】
ステップS40:続いて演算部28aは、アクチュエータ駆動処理を実行する。この処理は、先の演算処理での演算結果に基づいてアクチュエータ(電磁ブレーキ24、電動モータ30)を作動させることにより、操作部12に回転抵抗を付与したり、自立回転力を付与したりするものである。これにより、実際に操作者が行う操作部12の操作に対して操作感触を付与することができる。
【0065】
ステップS50:そして演算部28aは、信号出力処理を実行する。この処理は、上述した外部の表示装置32に対して外部出力信号を出力するためのものである。具体的には、演算部28aは、現在の操作部12の回転角度に対応する回転角座標(θ)を外部出力信号として表示装置32に出力する。表示装置32は、この外部出力信号に基づいて表示画面32上におけるポインタ等の表示位置を制御することができる。なお、操作感触付与形入力装置10を表示装置32に接続していない場合、この信号出力処理(ステップS50)を実行する必要はない。
【0066】
電源投入後、演算部28aが上記の各処理(ステップS20〜ステップS50)を定常的に実行することにより、現在の操作部12の回転角度に対応する回転角座標(θ)がリアルタイムで演算される。また演算部28aがそのときの回転角座標(θ)に基づいてアクチュエータ(電磁ブレーキ24、電動モータ30)を駆動することにより、回転角度の変化に応じて操作部12に付与される回転抵抗や自立回転力(大きさと方向)も変化する。
【0067】
〔フォースカーブの例〕
図5は、上記の演算処理(ステップS30)において演算に用いることができるフォースカーブの第1例(図5中(A))及び第2例(図5中(B))を示した図である。以下、それぞれについて説明する。
【0068】
〔第1例:右回転時〕
図5中(A):第1例のフォースカーブは、例えば操作部12が右方向(回転軸14の上方からみて右方向)に回転する場合の制御に適用可能なプロファイルデータとして記憶部28bに記憶されている。フォースカーブが破線で示されている部分は、そこでの回転抵抗を電磁ブレーキ24により発生させることを表しており、フォースカーブが実線で示されている部分は、そこでの自立回転力を電動モータ30により発生させることを表している。また縦軸の上側は左方向への回転抵抗(FL)の大きさを表し、縦軸の下側は右方向への自立回転力(FR)の大きさを表している。
【0069】
〔区間A:θ0≦θ≦θ2〕
先ず、検出された操作部12の回転角度(θ)が座標軸上でθ0〜θ1までの間にある場合、演算部28aはフォースカーブに基づき、右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30を駆動する。これにより、操作者が特に操作しなくても、操作部12が自立的に右方向へ回転する。
【0070】
操作部12の回転角度(θ)が座標軸上でθ1の右側へ移動すると、操作部12に与えられる右方向への自立回転力は次第に減少していく。そして回転角度(θ)が座標軸上でθ2に達すると、操作部12に与えられる自立回転力は0になる。このため特に操作者が操作部12を操作しなければ、そこで操作部12は回転を停止する。なお、この区間Aにおいて操作者が操作部12を操作した場合でも同様の動作となる。
【0071】
〔区間B:θ2≦θ≦θn〕
次に、検出された操作部12の回転角度(θ)が座標軸上でθ2〜θn(ただしθn>θ2)までの間にある場合、演算部28aはフォースカーブの破線部分と実線部分のそれぞれに基づき、左方向への回転抵抗(極大値Fa)と右方向への自立回転力(極大値Fa)を操作部12に与えるべく電磁ブレーキ24と電動モータ30とを交互に駆動する。
【0072】
具体的には、先ず回転角度(θ)が座標軸上でθ2〜θ3までの間にある場合、演算部28aはフォースカーブ(破線部分)に基づき、電磁ブレーキ24により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。これにより、操作者が操作部12を回転させていくにつれて、次第に抵抗力が高まっていくような操作感触が付与されることになる。そして回転角度(θ)が座標軸上でθ3に達すると、演算部28aはそこで一気に回転抵抗の付与を解除する。これにより、操作者に対してクリック感触を付与することができる。
【0073】
さらに演算部28aはフォースカーブ(実線部分)に基づき、その瞬間から右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動を開始する。これにより、クリック感触を付与した直後にあたかも操作部12の回転が急に加速された(軽くなった)かのような操作感触が付与されることになる。なお、このとき付与される自立回転力は、検出される操作部12の回転角度(θ)が座標軸上で右方向に移動するにつれて次第に減少していく。
【0074】
この後も同様に、操作部12の回転角度(θ)が座標軸上でθ4〜θ5までの間にある場合、演算部28aはフォースカーブ(破線部分)に基づき電磁ブレーキ24により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。そして回転角度(θ)が座標軸上でθ5に達すると、演算部28aはそこで一気に回転抵抗の付与を解除し、回転角度(θ)が座標軸上でθ6に達するまでの間、フォースカーブ(実線部分)に基づいて右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動を開始する(座標軸上でθ6〜θ7,θ7〜θnまでの間も同様。)。
【0075】
〔区間C:θn≦θ≦θw〕
操作部12の回転角度(θ)が座標軸上でθnの右側へ移動すると、演算部28aはフォースカーブ(破線部分)に基づき、そこから最大値Fmaxに向けて回転抵抗を増大させるべく電磁ブレーキ24を駆動する。これにより、操作者に対して次第に操作部12の回転操作が重くなっていくかのような操作感触を付与することができる。
【0076】
そして、操作部12の回転角度(θ)が座標軸上でθwに達すると、そこで演算部28aは最大値Fmaxの回転抵抗を付与するべく電磁ブレーキ24を最大電圧(電流)で駆動する。これにより操作者に対して、あたかも操作部12の回転操作が規制されたかのような操作感触(壁に突き当たった感触)を付与することができる。
【0077】
〔第2例:左回転時〕
次に、左回転時に適用できる第2例のフォースカーブについて説明する。
図5中(B):第2例のフォースカーブは、例えば操作部12が左方向(回転軸14の上方からみて左方向)に回転する場合の制御に適用可能なプロファイルデータとして記憶部28bに記憶されている。第2例においても同様に、フォースカーブが破線で示されている部分は、そこでの回転抵抗を電磁ブレーキ24により発生させることを表しており、フォースカーブが実線で示されている部分は、そこでの自立回転力を電動モータ30により発生させることを表している。
【0078】
この場合、縦軸の上側は左方向への自立回転力(FL)の大きさを表し、縦軸の下側は右方向への回転抵抗(FR)の大きさを表している。また操作部12の回転操作に伴い、回転角度(θ)は座標軸上で左方向へ移動するものとする。
【0079】
〔区間A:θ2≦θ≦θ0〕
先ず、検出された操作部12の回転角度(θ)が座標軸上でθ0〜θ1(右から左への移動)までの間にある場合、演算部28aはフォースカーブに基づき、左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30を駆動する。これにより、操作者が特に操作しなくても、操作部12が自立的に左方向へ回転する。
【0080】
操作部12の回転角度(θ)が座標軸上でθ1の左側へ移動すると、操作部12に与えられる左方向への自立回転力は次第に減少していく。そして回転角度(θ)が座標軸上でθ2に達すると、操作部12に与えられる自立回転力は0になる。このため特に操作者が操作部12を操作しなければ、そこで操作部12は回転を停止する。なお、この区間Aにおいて操作者が操作部12を操作した場合でも同様の動作となる。
【0081】
〔区間B:θn≦θ≦θ2〕
次に、検出された操作部12の回転角度(θ)が座標軸上でθ2〜θn(ただしθ2>θn)までの間にある場合は以下となる。すなわち、演算部28aはフォースカーブの破線部分と実線部分のそれぞれに基づき、右方向への回転抵抗(極大値Fa)と左方向への自立回転力(極大値Fa)を操作部12に与えるべく電磁ブレーキ24と電動モータ30とを交互に駆動する。
【0082】
具体的には、先ず回転角度(θ)が座標軸上でθ2〜θ3までの間にある場合、演算部28aはフォースカーブ(破線部分)に基づき、電磁ブレーキ24により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。これにより、操作者が操作部12を回転させていくにつれて、次第に抵抗力が高まっていくような操作感触が付与されることになる。そして回転角度(θ)が座標軸上でθ3に達すると、演算部28aはそこで一気に回転抵抗の付与を解除する。これにより、操作者に対してクリック感触を付与することができる。
【0083】
さらに演算部28aはフォースカーブ(実線部分)に基づき、その瞬間から左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動を開始する。これにより、クリック感触を付与した直後にあたかも操作部12の回転が急に加速された(軽くなった)かのような操作感触が付与されることになる。ここでも同様に、付与される自立回転力は、検出される操作部12の回転角度(θ)が座標軸上で左方向に移動するにつれて次第に減少していく。
【0084】
この後も同様に、操作部12の回転角度(θ)が座標軸上でθ4〜θ5までの間にある場合、演算部28aはフォースカーブ(破線部分)に基づき電磁ブレーキ24により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。そして回転角度(θ)が座標軸上でθ5に達すると、演算部28aはそこで一気に回転抵抗の付与を解除し、回転角度(θ)が座標軸上でθ6に達するまでの間、フォースカーブ(実線部分)に基づいて左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動を開始する(座標軸上でθ6〜θ7,θ7〜θnまでの間も同様。)。
【0085】
〔区間C:θw≦θ≦θn〕
操作部12の回転角度(θ)が座標軸上でθnの左側へ移動すると、演算部28aはフォースカーブ(破線部分)に基づき、そこから最大値Fmaxに向けて回転抵抗を増大させるべく電磁ブレーキ24を駆動する。これにより、操作者に対して次第に操作部12の回転操作が重くなっていくかのような操作感触を付与することができる。
【0086】
そして、操作部12の回転角度(θ)が座標軸上でθwに達すると、そこで演算部28aは最大値Fmaxの回転抵抗を付与するべく電磁ブレーキ24を最大電圧(電流)で駆動する。これにより操作者に対して、あたかも操作部12の回転操作が規制された(壁に突き当たった)かのような操作感触(壁感触)を付与することができる。
【0087】
〔第1例及び第2例のまとめ〕
上述した第1例及び第2例のフォースカーブを用いてアクチュエータ(電磁ブレーキ24、電動モータ30)の作動状態を制御した場合、右回転又は左回転のいずれについても、操作部12に回転抵抗を付与する場合は電磁ブレーキ24だけが駆動されることになる。このため、電動モータ30の動力で回転抵抗を発生させる場合に比較して、より少ない電力で大きな回転抵抗を発生させることができる。特に操作部12の回転を規制する場合(壁パターン)は大きな回転抵抗を必要とするが、電磁ブレーキ24は電動モータ30に比べて変換効率がよいため、それだけ消費電力を少なくすることができる。
【0088】
一方で、アクチュエータとして電磁ブレーキ24だけでなく、電動モータ30も使用することにより、操作部12を所望の回転位置(座標軸上のθ2)まで自立的に回転させることができるし、回転操作の途中で操作部12の回転を加速するような自立回転力を付与することもできる。
【0089】
〔フォースカーブの第3例〕
次に図6は、上記の演算処理(ステップS30)において演算に用いることができるフォースカーブの第3例(図6中(A))及び第4例(図6中(B))を示した図である。これら第3,第4例は、操作部12の回転を大きく規制する場合(壁パターン時)にのみ電磁ブレーキ24を駆動し、それ以外の場合は電磁ブレーキ24を駆動せず、電動モータ30だけを駆動するものである。以下、それぞれについて説明する。
【0090】
〔第3例:右回転時〕
図6中(A):第3例のフォースカーブは、操作部12が右方向に回転する場合の制御に適用可能なプロファイルデータである。
【0091】
〔区間A:θ0≦θ≦θ2〕
先ず、検出された操作部12の回転角度(θ)が座標軸上でθ0〜θ1までの間にある場合、演算部28aはフォースカーブに基づき、右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30を駆動する。これにより、操作者が特に操作しなくても、操作部12が自立的に右方向へ回転する。
【0092】
操作部12の回転角度(θ)が座標軸上でθ1の右側へ移動すると、操作部12に与えられる右方向への自立回転力は次第に減少していく。そして回転角度(θ)が座標軸上でθ2に達すると、操作部12に与えられる自立回転力は0になる。このため特に操作者が操作部12を操作しなければ、そこで操作部12は回転を停止する。なお、この区間Aにおいて操作者が操作部12を操作した場合でも同様の動作となる。
【0093】
〔区間B:θ2≦θ≦θn〕
次に、検出された操作部12の回転角度(θ)が座標軸上でθ2〜θn(ただしθn>θ2)までの間にある場合、演算部28aはフォースカーブに基づき、左方向への回転抵抗(極大値Fa)と右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の作動状態だけを制御する。
【0094】
具体的には、先ず回転角度(θ)が座標軸上でθ2〜θ3までの間にある場合、演算部28aはフォースカーブ(上側の登り区間)に基づき、電動モータ30により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。これにより、操作者が操作部12を回転させていくにつれて、次第に抵抗力が高まっていくような操作感触が付与されることになる。そして回転角度(θ)が座標軸上でθ3に達すると、演算部28aはそこで一気に回転抵抗の付与を解除する。これにより、操作者に対してクリック感触を付与することができる。
【0095】
さらに演算部28aはフォースカーブに基づき、その瞬間から右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動力を制御する。このとき電動モータ30の回転方向は、それまでの左方向(CCW)から右方向(CW)に反転することになる。これにより、クリック感触を付与した直後にあたかも操作部12の回転が急に加速された(軽くなった)かのような操作感触が付与されることになる。また、このとき付与される自立回転力は、検出される操作部12の回転角度(θ)が座標軸上で右方向に移動するにつれて次第に減少していく。
【0096】
この後も同様に、操作部12の回転角度(θ)が座標軸上でθ4〜θ5までの間にある場合、演算部28aはフォースカーブ(次の登り区間)に基づき電動モータ30により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。そして回転角度(θ)が座標軸上でθ5に達すると、演算部28aはそこで一気に回転抵抗の付与を解除し、回転角度(θ)が座標軸上でθ6に達するまでの間、フォースカーブに基づいて右方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動力を制御する(座標軸上でθ6〜θ7,θ7〜θnまでの間も同様。)。
【0097】
〔区間C:θn≦θ≦θw〕
操作部12の回転角度(θ)が座標軸上でθnの右側へ移動すると、演算部28aは電動モータ30の駆動を停止する。そして演算部28aはフォースカーブ(破線部分)に基づき、そこから最大値Fmaxに向けて回転抵抗を増大させるべく、今度は電磁ブレーキ24を駆動する。これにより、操作者に対して次第に操作部12の回転操作が重くなっていくかのような操作感触を付与することができる。
【0098】
そして、操作部12の回転角度(θ)が座標軸上でθwに達すると、そこで演算部28aは最大値Fmaxの回転抵抗を付与するべく電磁ブレーキ24を最大電圧(電流)で駆動する。これにより操作者に対して、あたかも操作部12の回転操作が規制された(壁に突き当たった)かのような操作感触(壁感触)を付与することができる。
【0099】
〔第4例:左回転時〕
図6中(B):第4例のフォースカーブは、操作部12が左方向(回転軸14の上方からみて左方向)に回転する場合の制御に適用可能なプロファイルデータである。ここでも同様に、縦軸の上側は左方向への自立回転力(FL)の大きさを表し、縦軸の下側は右方向への回転抵抗(FR)の大きさを表している。また操作部12の回転操作に伴い、回転角度(θ)は座標軸上で左方向へ移動するものとする。
【0100】
〔区間A:θ2≦θ≦θ0〕
先ず、検出された操作部12の回転角度(θ)が座標軸上でθ0〜θ1(右から左への移動)までの間にある場合、演算部28aはフォースカーブに基づき、左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30を駆動する。これにより、操作者が特に操作しなくても、操作部12が自立的に左方向へ回転する。
【0101】
操作部12の回転角度(θ)が座標軸上でθ1の左側へ移動すると、操作部12に与えられる左方向への自立回転力は次第に減少していく。そして回転角度(θ)が座標軸上でθ2に達すると、操作部12に与えられる自立回転力は0になる。このため特に操作者が操作部12を操作しなければ、そこで操作部12は回転を停止する。なお、この区間Aにおいて操作者が操作部12を操作した場合でも同様の動作となる。
【0102】
〔区間B:θn≦θ≦θ2〕
次に、検出された操作部12の回転角度(θ)が座標軸上でθ2〜θn(ただしθ2>θn)までの間にある場合、演算部28aはフォースカーブに基づき、右方向への回転抵抗(極大値Fa)と左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の作動状態だけを制御する。
【0103】
具体的には、先ず回転角度(θ)が座標軸上でθ2〜θ3までの間にある場合、演算部28aはフォースカーブ(下側の下り区間)に基づき、電動モータ30により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。これにより、操作者が操作部12を回転させていくにつれて、次第に抵抗力が高まっていくような操作感触が付与されることになる。そして回転角度(θ)が座標軸上でθ3に達すると、演算部28aはそこで一気に回転抵抗の付与を解除する。これにより、操作者に対してクリック感触を付与することができる。
【0104】
さらに演算部28aはフォースカーブに基づき、その瞬間から左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動力を制御する。このとき電動モータ30の回転方向は、それまでの右方向(CW)から左方向(CCW)に反転することになる。これにより、クリック感触を付与した直後にあたかも操作部12の回転が急に加速された(軽くなった)かのような操作感触が付与されることになる。また、このとき付与される自立回転力は、検出される操作部12の回転角度(θ)が座標軸上で左方向に移動するにつれて次第に減少していく。
【0105】
この後も同様に、操作部12の回転角度(θ)が座標軸上でθ4〜θ5までの間にある場合、演算部28aはフォースカーブ(次の下り区間)に基づき電動モータ30により付与するべき回転抵抗の大きさを極大値Faに向けて次第に増加させていく。そして回転角度(θ)が座標軸上でθ5に達すると、演算部28aはそこで一気に回転抵抗の付与を解除し、回転角度(θ)が座標軸上でθ6に達するまでの間、フォースカーブに基づいて左方向への自立回転力(極大値Fa)を操作部12に与えるべく電動モータ30の駆動力を制御する(座標軸上でθ6〜θ7,θ7〜θnまでの間も同様。)。
【0106】
〔区間C:θw≦θ≦θn〕
操作部12の回転角度(θ)が座標軸上でθnの左側へ移動すると、演算部28aは電動モータ30の駆動を停止する。そして演算部28aはフォースカーブ(破線部分)に基づき、そこから最大値Fmaxに向けて回転抵抗を増大させるべく、今度は電磁ブレーキ24を駆動する。これにより、操作者に対して次第に操作部12の回転操作が重くなっていくかのような操作感触を付与することができる。
【0107】
そして、操作部12の回転角度(θ)が座標軸上でθwに達すると、そこで演算部28aは最大値Fmaxの回転抵抗を付与するべく電磁ブレーキ24を最大電圧(電流)で駆動する。これにより操作者に対して、あたかも操作部12の回転操作が規制された(壁に突き当たった)かのような操作感触(壁感触)を付与することができる。
【0108】
〔第4例及び第5例のまとめ〕
上述した第4例及び第5例のフォースカーブを用いてアクチュエータ(電磁ブレーキ24、電動モータ30)の作動状態を制御した場合、右回転又は左回転のいずれについても、操作部12の回転を大きく規制する場合(壁パターン)は電磁ブレーキ24だけが駆動されることになる。このため、電動モータ30の動力で回転抵抗を発生させる場合に比較して、より少ない電力で大きな回転抵抗を発生させることができる。
【0109】
なお、上記の第1〜第4では、最大値Fmaxの回転抵抗を電磁ブレーキ24のみで発生させているが、電磁ブレーキ24と合わせて電動モータ30を駆動することにより、さらに強力な回転抵抗を付与することもできる。これにより、操作部12の回転操作をより強固に規制することで、極めて明快な壁感触を付与することができる。
【0110】
〔第2実施形態〕
次に、第2実施形態の操作感触付与形入力装置10について説明する。図7は、第2実施形態の操作感触付与型入力装置10の全体的な構成を示す概略図である。第2実施形態では、上記の電動モータ30を超音波モータ40で構成した点が第1実施形態と大きく異なっている。その他の構成については第1実施形態と共通であり、ここでは共通の構成には図示とともに同じ符号を付し、重複した説明を省略するものとする。
【0111】
〔超音波モータの構成〕
一般的な超音波モータは、そのステータにロータを強く圧着させた状態で保持する必要があるが、第2実施形態においては、超音波モータ40のステータを摩擦部材40aと圧電素子40bとで構成している。これら摩擦部材40a及び圧電素子40bは、回転軸線CLに沿う方向に積層された状態でアーマチュアロータ22と電磁コイル24bとの間に配置されている。また、この状態で摩擦部材40aがアーマチュアロータ22に対向しており、圧電素子40bが電磁コイル24bに対向している。
【0112】
上記の超音波モータ40において、特に摩擦部材40aは、圧電素子40bの駆動時に進行波を発生させるステータとして機能するものであるが、電磁コイル24bの通電時にはアーマチュアロータ22を強く密着させることで、電磁ブレーキ24による摩擦力を発生させる部材(「摩擦部材」そのもの)としても機能する。このため第2実施形態では、超音波モータ40のステータ(特に摩擦部材40a)を電磁ブレーキ24のステータとしても利用することができ、それだけ使用する部品を少なくすることができる。
【0113】
なお第2実施形態では、回転部材20やアーマチュアロータ22を含めて電磁ブレーキ24及び超音波モータ40が1つのケース体42内に収容されている。ケース体42は、例えば中空の円柱形状をなしており、その上面には挿通孔42aが形成されており、この挿通孔42aに回転軸14(第2パーツ14b)が挿通された状態にある。なお、挿通孔42aの内径は回転軸14の外径よりも僅かに大きく、このため回転軸14はケース体42に対して回転自在である。これに対し、電磁ブレーキ24(ケース型コア24a)はケース体42に固定されているので、第2実施形態の操作感触付与型入力装置10は、ケース体42をベースとして図示しない他の装置本体等に取り付けることができる。
【0114】
次に、第2実施形態の操作感触付与型入力装置10の制御例について説明する。第2実施形態においても、そのアクチュエータ(電磁ブレーキ24及び超音波モータ40)の制御に関して制御部28を適用することができる。具体的には、図3に示される制御系の構成中、電動モータ30を超音波モータ40として制御系を構築すればよい。
【0115】
なお、フォトインタラプタ18,19を用いた操作部12の回転位置(回転角度)の検出については第1実施形態と同様である。また、演算部28aが実行する制御処理についても図4に示されるフローチャートを適用することができる。
【0116】
〔第2実施形態の特徴〕
第2実施形態では、電動モータ30に代えて超音波モータ40を用いているが、そのステータ(摩擦部材40a)が電磁ブレーキ24のステータと兼用されているため、電磁ブレーキ24を駆動してアーマチュアロータ22を摩擦部材40aに圧着させた状態でなければ、超音波モータ40を駆動することができない。そこで、以下に電磁ブレーキ24との併用時に適用可能な制御例を挙げて説明する。
【0117】
〔制御例1〕
図8は、超音波モータ40を駆動する際に出力される駆動用信号(図8中(A))と電磁ブレーキ24の駆動電圧(図8中(B))のパターンとともに、操作部12に付与される回転抵抗のフォースカーブ(図8中(C))を合わせて示した図である。なお図8中、横軸は検出された操作部12の回転角度(θ)の座標を表している。また制御例1では、操作者が操作部12を右方向に回転操作する場合を想定している。
【0118】
〔超音波モータ駆動用信号〕
図8中(A):超音波モータ40の作動状態は、圧電素子40bに印加される駆動用信号の波形に基づいて制御することができる。ここで、縦軸の上側は左方向への回転トルク(TL)の大きさを表し、縦軸の下側は右方向への回転トルク(TR)の大きさを表している。駆動用信号が縦軸の上下いずれかに変化すると、そのときの振幅と時間に応じて摩擦部材40aに進行波が発生し、このとき進行波の回転方向と逆向きにアーマチュアロータ22を回転させようとするトルクが発生する。
【0119】
制御例1の波形パターンでは、検出された操作部12の回転角度(θ)が座標軸上で所定角度P3に達するまでの間、特に駆動用信号が出力されていない。このため、この間は特に超音波モータ40は回転しない。
【0120】
〔区間S:P3≦θ≦θ4〕
この後、操作部12の回転角度(θ)が座標軸上でP3より右側に移動すると、所定角度θ4に達するまでの間に駆動用信号が上下に周期的に変化している。この場合、駆動用信号の波形に応じて超音波モータ40が左右方向への回転トルクを周期的に発生させる。
【0121】
〔電磁ブレーキ駆動電圧〕
図8中(B):電磁ブレーキ24の作動状態は、上記のように電磁コイル24bに印加される駆動電圧(電流)に基づいて制御することができるので、駆動電圧の波形は電磁ブレーキ24により発生する回転抵抗のフォースカーブに相当する。なお、縦軸の上側は、左方向への回転抵抗の大きさを表している。
【0122】
この制御例1では、操作部12の回転角度(θ)が座標軸上でθ1〜P1までの間にある場合、演算部28aは次第に電磁コイル24bに対する駆動電圧を増加させている。そして、回転角度(θ)が座標軸上でP1に達すると、駆動電圧は極大値Vaに達する。そこからさらに回転角度(θ)が座標軸上で右側へ移動すると、演算部28aは駆動電圧を次第に減少させていき、回転角度(θ)がP2に達すると、駆動電圧は0Vになる。
【0123】
続いて、操作部12の回転角度(θ)が座標軸上でθ2〜P2までの間にある場合、再び演算部28aは次第に電磁コイル24bに対する駆動電圧を増加させる。そして、回転角度(θ)が座標軸上でP2に達すると、駆動電圧は極大値Vaに達する。そこからさらに回転角度(θ)が座標軸上で右側へ移動すると、演算部28aは駆動電圧を次第に減少させていき、回転角度(θ)がP3に達すると駆動電圧は0Vになる。以下、θ3〜P3、P3〜θ4の間でも同様である。
【0124】
〔操作部の回転抵抗〕
図8中(C):アクチュエータとして電磁ブレーキ24と超音波モータ40とを併用した場合、実際に操作部12に付与される操作感触は、両者の出力を合成したものとなる。
【0125】
〔θ1〜P3までの間〕
操作者が操作部12を連続をして右方向へ回転させていくとき、回転角度(θ)が座標軸上でP3に達するまでの間は超音波モータ40が作動していないので、この間は電磁ブレーキ24による回転抵抗だけが付与される。この場合、回転角度(θ)が座標軸上でθ1に達すると、そこから次第に回転抵抗が大きくなっていき、やがて回転角度(θ)がP1に達すると、そこで回転抵抗は極大となる。そして、回転角度(θ)がP1を超えると回転抵抗が減少していくので、このとき操作者に対してクリック感触を付与することができる。
【0126】
なお、以上の操作感触は回転角度(θ)が座標軸上でθ2〜θ3までの間を移動する場合についても同様であり、回転角度(θ)が座標軸上でP2を超えたところでクリック感触を発生させることができる。
【0127】
〔区間S:でこぼこ感触〕
上記の区間S(P3〜θ4)では、電磁ブレーキ24とともに超音波モータ40が作動するため、この間の操作感触は、両者の出力を重ね合わせたものとなる。具体的には、電磁ブレーキ24による回転抵抗のフォースカーブに超音波モータ40によるトルク波形が重畳されたような形となって現れる。ただし、超音波モータ40のトルクは単純に駆動用信号の波形だけでなく、電磁ブレーキ24に対する駆動電圧にも依存する。なぜなら、電磁ブレーキ24の吸着力が弱くなると、それに伴ってステータ(摩擦部材40a)とアーマチュアロータ22との圧着力が低下するため、その分、トルクが目減りするからである。
【0128】
ただし、電磁ブレーキ24とともに超音波モータ40を駆動することで、区間Sでは操作部12に回転抵抗を付与するだけでなく、その間に操作部12が回転方向(ここでは右方向)へ自立的に回転する力を発生しているかのような感触を付与することができる。また、回転抵抗は電磁ブレーキ24によるフォースカーブだけのようになだらかに変化せず、周期的に細かくエッジが立ったかのような引っかかり感触となって現れる。その結果、自動車のステアリングホイールに喩えると、自動車がでこぼこ道を走行中に路面からの反力であたかもステアリングホイールが細かく揺さぶられているかのような操作感触を発生させることができる。
【0129】
〔制御例2〕
図9は、主に超音波モータ40によって自立回転力を付与する場合の駆動用信号と電磁ブレーキ24の駆動電圧のパターンとを示した図である。なお、図9では操作部12を左方向(座標軸上のP0からPcへ左方向)に自立回転させる場合を想定している。
【0130】
図9中(A):例えば、操作部12の現在の回転角度(θ)が座標軸上のP0より僅かに左側にある場合、超音波モータ40の駆動用信号が0より僅かに大きくなる。
【0131】
図9中(B):このとき、電磁ブレーキ24には最大駆動電圧Vaが印加されている。なお、電磁ブレーキ24には超音波モータ40による自立回転中(座標軸上でP0〜Pcの区間)、継続して最大駆動電圧Vaが印加される。
【0132】
図9中(C):その結果、操作部12には超音波モータ40の駆動用信号の波形に応じた自立回転力が付与される。これにより、操作部12は座標軸上の所定位置P0から基準位置Pcに向けて自立的に回転する。この間、操作部12は始め低速で回転し、その後に回転速度を増すと中間点から減速し、最後は極低速で基準位置Pcに停止する。これにより、例えば操作者が操作部12を所定位置P0で手を離した場合であっても、操作部12を基準位置Pcへ強制的に復帰させることができる。
【0133】
第2実施形態の操作感触付与型入力装置10によれば、アクチュエータとして超音波モータ40を使用しても、アーマチュアロータ22とステータ(摩擦部材40a)との圧着力を電磁ブレーキ24によって得ているため、非作動時にまでアーマチュアロータ22をステータに圧着させておく必要がない。また、電磁ブレーキ24を非作動にすれば超音波モータ40も作動可能な状態にならず、アーマチュアロータ22とステータとの間に摩擦が働かないので、超音波モータ40を用いていてもスムーズな操作部12の回転操作を実現することができる。
【0134】
上述した各実施形態に操作感触付与型入力装置10によれば、電磁ブレーキ24と電動モータ30又は超音波モータ40とを併用することにより、より大きな回転抵抗を少ない電力で得ることができる上、自立的に操作部12を回転させることができる。また、回転抵抗の付与と合わせて自立回転力を付与することができるため、単純にいずれか一方だけを付与する場合と比較して、より多様性に富んだ操作感触の付与パターンを実現することができる。
【0135】
なお、第1実施形態で挙げたフォースカーブは、第2実施形態の構造においても適用することができる。また、各実施形態で挙げたフォースカーブや波形パターンは図示とともに挙げた例に限らず、その他のパターンを採用してもよい。
【0136】
また、回転状態の検出はコード板16とフォトインタラプタ18,19との組み合わせだけでなく、例えば反射板とフォトスイッチとの組み合わせで実現してもよい。
【0137】
なお、上述した実施形態では、操作部が回転操作されるものを例示したが、例えば操作部としてスライド操作等の他の移動形態を有するものにも本発明を適用することが可能である。この場合、例えば往復移動式のアクチュエータ(リニアアクチュエータ等)を用いて操作部を自立的にスライド移動させるとともに、操作部の移動状態(座標)をエンコーダ等で検出し、その検出結果に基づきアクチュエータの作動状態を制御すればよい。
【0138】
また、上述した実施形態では、アクチュエータとして電気を動力源とした電動モータおよび電磁ブレーキを例示したが、例えば油圧や空圧等の他のエネルギーを動力源としたモータやブレーキを用いてもよい。
【0139】
その他、図示とともに示した各種部材の形状や配置はいずれも好ましい例であり、本発明の実施に際してこれらを適宜変更可能であることはいうまでもない。
【符号の説明】
【0140】
10 操作感触付与型入力装置
12 操作部
14 回転軸
16 コード板
18,19 フォトインタラプタ
20 回転部材
22 アーマチュアロータ
24 電磁ブレーキ
28 制御部
28a 演算部
28d 出力部
30 電動モータ
40 超音波モータ
40a 摩擦部材
40b 圧電素子
【特許請求の範囲】
【請求項1】
操作者により回転操作される操作部と、
前記操作部の回転状態を検出して出力する回転状態検出手段と、
前記操作部への回転操作に対する回転抵抗又は前記操作部を自立的に回転させる自立回転力の少なくとも一方を前記操作部に与えるアクチュエータと、
前記回転状態検出手段からの出力に基づき算出した前記操作部の回転位置とその回転方向に基づき前記アクチュエータの作動状態を制御する制御手段とを備えた操作感触付与型入力装置であって、
前記アクチュエータは、
前記操作部とともに回転するロータ部材を前記操作部とともに回転しない状態に固定されたステータ部材に圧着させて前記回転抵抗を発生させるブレーキ手段と、前記操作部を回転させて前記自立回転力を発生させるモータ手段とから構成されることを特徴とする操作感触付与型入力装置。
【請求項2】
請求項1に記載の操作感触付与型入力装置において、
前記制御手段は、
前記操作部に対する回転操作の方向と反対方向の前記回転抵抗を発生させる場合は前記ブレーキ手段を作動させ、前記操作部に対する回転操作の方向と同じ方向の前記自立回転力を発生させる場合は前記モータ手段を作動させることを特徴とする操作感触付与型入力装置。
【請求項3】
請求項1に記載の操作感触付与型入力装置において、
前記制御手段は、
前記操作部に対する回転操作が一方向に連続して行われる場合、前記回転状態検出手段からの出力に基づいて算出した回転位置が所定位置に達するまでの間は前記モータ手段のみを作動させて前記操作部に対する回転操作の方向と反対方向への前記回転抵抗又は前記操作部に対する回転操作の方向と同じ方向への前記自立回転力のいずれかを発生させ、算出した回転位置が前記所定位置に達すると前記ブレーキ手段のみを作動させて前記操作部に対する回転操作の方向と反対方向への前記回転抵抗を発生させることを特徴とする操作感触付与型入力装置。
【請求項4】
請求項1に記載の操作感触付与型入力装置において、
前記アクチュエータは、
前記操作部とともに回転しつつ、その回転軸線に沿う方向に移動可能に配置された磁性金属からなるアーマチュアロータと、
前記アーマチュアロータを前記回転軸線に沿う方向へ吸着する電磁コイルと、
前記アーマチュアロータと前記電磁コイルとの間に配置され、前記回転軸線に沿う方向でみて前記アーマチュアロータに対向する摩擦部材と前記電磁コイルに対向する圧電素子とを重ね合わせて構成されたステータとからなり、
前記制御手段は、
前記電磁コイルにのみ通電した状態で前記アクチュエータを前記電磁ブレーキとして機能させる一方、前記電磁コイル及び前記圧電素子の両方に通電した状態では前記アクチュエータを超音波モータとして機能させることを特徴とする操作感触付与型入力装置。
【請求項5】
操作者により移動操作される操作部と、
前記操作部の移動状態を検出して出力する移動状態検出手段と、
前記操作部への移動操作に対する移動抵抗又は前記操作部を自立的に移動させる自立移動力の少なくとも一方を前記操作部に与えるアクチュエータと、
前記移動状態検出手段からの出力に基づき算出した前記操作部の移動位置とその移動方向に基づき前記アクチュエータの作動状態を制御する制御手段とを備えた操作感触付与型入力装置であって、
前記アクチュエータは、
前記操作部とともに移動する移動部材を前記操作部とともに移動しない状態に固定されたステータ部材に圧着させて前記移動抵抗を発生させるブレーキ手段と、前記操作部を移動させて前記自立移動力を発生させるモータ手段とから構成されることを特徴とする操作感触付与型入力装置。
【請求項6】
請求項5に記載の操作感触付与型入力装置において、
前記制御手段は、
前記操作部に対する移動操作の方向と反対方向の前記移動抵抗を発生させる場合は前記ブレーキ手段を作動させ、前記操作部に対する移動操作の方向と同じ方向の前記自立移動力を発生させる場合は前記モータ手段を作動させることを特徴とする操作感触付与型入力装置。
【請求項7】
請求項5に記載の操作感触付与型入力装置において、
前記制御手段は、
前記操作部に対する移動操作が一方向に連続して行われる場合、前記移動状態検出手段からの出力に基づいて算出した移動位置が所定位置に達するまでの間は前記モータ手段のみを作動させて前記操作部に対する移動操作の方向と反対方向への前記移動抵抗又は前記操作部に対する移動操作の方向と同じ方向への前記自立移動力のいずれかを発生させ、算出した移動位置が前記所定位置に達すると前記ブレーキ手段のみを作動させて前記操作部に対する移動操作の方向と反対方向への前記移動抵抗を発生させることを特徴とする操作感触付与型入力装置。
【請求項1】
操作者により回転操作される操作部と、
前記操作部の回転状態を検出して出力する回転状態検出手段と、
前記操作部への回転操作に対する回転抵抗又は前記操作部を自立的に回転させる自立回転力の少なくとも一方を前記操作部に与えるアクチュエータと、
前記回転状態検出手段からの出力に基づき算出した前記操作部の回転位置とその回転方向に基づき前記アクチュエータの作動状態を制御する制御手段とを備えた操作感触付与型入力装置であって、
前記アクチュエータは、
前記操作部とともに回転するロータ部材を前記操作部とともに回転しない状態に固定されたステータ部材に圧着させて前記回転抵抗を発生させるブレーキ手段と、前記操作部を回転させて前記自立回転力を発生させるモータ手段とから構成されることを特徴とする操作感触付与型入力装置。
【請求項2】
請求項1に記載の操作感触付与型入力装置において、
前記制御手段は、
前記操作部に対する回転操作の方向と反対方向の前記回転抵抗を発生させる場合は前記ブレーキ手段を作動させ、前記操作部に対する回転操作の方向と同じ方向の前記自立回転力を発生させる場合は前記モータ手段を作動させることを特徴とする操作感触付与型入力装置。
【請求項3】
請求項1に記載の操作感触付与型入力装置において、
前記制御手段は、
前記操作部に対する回転操作が一方向に連続して行われる場合、前記回転状態検出手段からの出力に基づいて算出した回転位置が所定位置に達するまでの間は前記モータ手段のみを作動させて前記操作部に対する回転操作の方向と反対方向への前記回転抵抗又は前記操作部に対する回転操作の方向と同じ方向への前記自立回転力のいずれかを発生させ、算出した回転位置が前記所定位置に達すると前記ブレーキ手段のみを作動させて前記操作部に対する回転操作の方向と反対方向への前記回転抵抗を発生させることを特徴とする操作感触付与型入力装置。
【請求項4】
請求項1に記載の操作感触付与型入力装置において、
前記アクチュエータは、
前記操作部とともに回転しつつ、その回転軸線に沿う方向に移動可能に配置された磁性金属からなるアーマチュアロータと、
前記アーマチュアロータを前記回転軸線に沿う方向へ吸着する電磁コイルと、
前記アーマチュアロータと前記電磁コイルとの間に配置され、前記回転軸線に沿う方向でみて前記アーマチュアロータに対向する摩擦部材と前記電磁コイルに対向する圧電素子とを重ね合わせて構成されたステータとからなり、
前記制御手段は、
前記電磁コイルにのみ通電した状態で前記アクチュエータを前記電磁ブレーキとして機能させる一方、前記電磁コイル及び前記圧電素子の両方に通電した状態では前記アクチュエータを超音波モータとして機能させることを特徴とする操作感触付与型入力装置。
【請求項5】
操作者により移動操作される操作部と、
前記操作部の移動状態を検出して出力する移動状態検出手段と、
前記操作部への移動操作に対する移動抵抗又は前記操作部を自立的に移動させる自立移動力の少なくとも一方を前記操作部に与えるアクチュエータと、
前記移動状態検出手段からの出力に基づき算出した前記操作部の移動位置とその移動方向に基づき前記アクチュエータの作動状態を制御する制御手段とを備えた操作感触付与型入力装置であって、
前記アクチュエータは、
前記操作部とともに移動する移動部材を前記操作部とともに移動しない状態に固定されたステータ部材に圧着させて前記移動抵抗を発生させるブレーキ手段と、前記操作部を移動させて前記自立移動力を発生させるモータ手段とから構成されることを特徴とする操作感触付与型入力装置。
【請求項6】
請求項5に記載の操作感触付与型入力装置において、
前記制御手段は、
前記操作部に対する移動操作の方向と反対方向の前記移動抵抗を発生させる場合は前記ブレーキ手段を作動させ、前記操作部に対する移動操作の方向と同じ方向の前記自立移動力を発生させる場合は前記モータ手段を作動させることを特徴とする操作感触付与型入力装置。
【請求項7】
請求項5に記載の操作感触付与型入力装置において、
前記制御手段は、
前記操作部に対する移動操作が一方向に連続して行われる場合、前記移動状態検出手段からの出力に基づいて算出した移動位置が所定位置に達するまでの間は前記モータ手段のみを作動させて前記操作部に対する移動操作の方向と反対方向への前記移動抵抗又は前記操作部に対する移動操作の方向と同じ方向への前記自立移動力のいずれかを発生させ、算出した移動位置が前記所定位置に達すると前記ブレーキ手段のみを作動させて前記操作部に対する移動操作の方向と反対方向への前記移動抵抗を発生させることを特徴とする操作感触付与型入力装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−165281(P2010−165281A)
【公開日】平成22年7月29日(2010.7.29)
【国際特許分類】
【出願番号】特願2009−8691(P2009−8691)
【出願日】平成21年1月19日(2009.1.19)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成22年7月29日(2010.7.29)
【国際特許分類】
【出願日】平成21年1月19日(2009.1.19)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]