
数値解析装置、数値解析方法、プログラム、および試験方法
【課題】駆動力の伝達経路を複数有する摺動式等速ジョイントについて、解析モデルの編集労力の低減と計算時間の短縮が可能な数値解析装置等を提供することができる。また、駆動力の伝達経路を複数有する摺動式等速ジョイントの実機試験において、試験装置の小規模化が可能な試験方法を提供することができる。
【解決手段】局所解析モデル定義手段21は、一つの伝達経路を構成する部品である局所部品と、局所部品間の連結と、局所部品同士の相対運動とを含む局所解析モデルを定義する。局所スラスト力算出手段22は、局所解析モデルから導かれる運動方程式を解くことで、一つの伝達経路のスラスト力である局所スラスト力を算出する。全体スラスト力算出手段23は、局所スラスト力の位相をずらして足し合わせることで、摺動式等速ジョイント全体のスラスト力である全体スラスト力を算出する。
【解決手段】局所解析モデル定義手段21は、一つの伝達経路を構成する部品である局所部品と、局所部品間の連結と、局所部品同士の相対運動とを含む局所解析モデルを定義する。局所スラスト力算出手段22は、局所解析モデルから導かれる運動方程式を解くことで、一つの伝達経路のスラスト力である局所スラスト力を算出する。全体スラスト力算出手段23は、局所スラスト力の位相をずらして足し合わせることで、摺動式等速ジョイント全体のスラスト力である全体スラスト力を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駆動力の伝達経路を複数有する摺動式等速ジョイントの数値解析を行う数値解析装置等、および駆動力の伝達経路を複数有する摺動式等速ジョイントを試験する試験方法に関するものである。
【背景技術】
【0002】
駆動力の伝達経路を複数有する摺動式等速ジョイントとしては、トリポード型等速ジョイントがある。トリポード型等速ジョイントは、例えば前輪駆動車のドライブシャフトに用いられる。トリポード型等速ジョイントは、駆動力伝達時に車両の横揺れ振動をもたらすスラスト力を誘起することが知られている。近年、スラスト力が低減されたトリポード型等速ジョイントを開発するため、ジョイント全体の解析モデルを作成し、機構運動解析ソフトウェアによる数値解析が行われている。機構運動解析ソフトウェアによる数値解析では、部品間の接触や摩擦を考慮し、入力軸に回転を与え、出力側に負荷トルクを与えた状態で接触力や摩擦力を計算する。解析モデルの作成方法の従来技術としては、本発明者らによる特許文献1がある。
【0003】
一方、実機の等速ジョイントを試験する場合、等速ジョイント用に市販されている汎用の試験装置を用いて、接触力や摩擦力を計測する。等速ジョイントの試験方法の従来技術としては、精度良く品質の検査を行うことを目的とした特許文献2がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特願2008−219027号公報
【特許文献2】特開平08−210949号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来技術における解析モデルの作成方法では、トリポード型等速ジョイントを構成する全ての部品間について接触と摩擦を模擬する必要があるため、解析モデルが詳細かつ大規模となり、解析モデルの編集作業に多大な労力がかかる。また、このような大規模な解析モデルに対しては、多大な計算時間を要する。
【0006】
また、従来技術における試験方法では、等速ジョイント単体あるいは等速ジョイントを含めたドライブシャフト全体としての試験しか行うことができず、試験装置も大掛かりなものとなる。また、等速ジョイントの内部挙動を可視化するためには、回転体から信号を取り出す必要があることから、スリップリングや無線テレメータなどを用いることになる。この場合、出力結果にはノイズが混入することやチャネル数が制限される等の問題がある。
【0007】
本発明は、前述した問題点に鑑みてなされたもので、その目的とすることは、駆動力の伝達経路を複数有する摺動式等速ジョイントについて、解析モデルの編集労力の低減と計算時間の短縮が可能な数値解析装置等を提供することである。また、別の目的は、駆動力の伝達経路を複数有する摺動式等速ジョイントの実機試験において、試験装置の小規模化が可能な試験方法を提供することである。
【課題を解決するための手段】
【0008】
前述した目的を達成するために第1の発明は、駆動力の伝達経路を複数有する摺動式等速ジョイントの数値解析を行う数値解析装置であって、一つの伝達経路を構成する部品である局所部品と、前記局所部品間の連結と、前記局所部品同士の相対運動とを含む局所解析モデルを定義する手段と、前記局所解析モデルから導かれる運動方程式を解くことで、一つの伝達経路のスラスト力である局所スラスト力を算出する手段と、前記局所スラスト力の位相をずらして足し合わせることで、前記摺動式等速ジョイント全体のスラスト力である全体スラスト力を算出する手段と、を具備することを特徴とする数値解析装置である。第1の発明によって、解析モデルの編集労力の低減と計算時間の短縮が可能な数値解析装置を提供することができる。
【0009】
第1の発明では、前記局所部品として、少なくとも、入力側となるハウジング内部に入力軸と平行に設けられるローラ溝、前記ローラ溝を摺動するローラ、前記ローラの回転軸であるローラ軸が含まれ、前記局所解析モデルは、前記局所部品が剛体として定義され、前記ローラと前記ローラ軸の連結、および前記ローラと前記ローラ溝の連結が接触と摩擦を模擬した非線形ばね要素として定義され、前記ローラ溝に対する前記ローラ軸の相対運動が拘束条件として定義される。
【0010】
第1の発明では、入力軸の座標系において、入力軸の方向をZ軸、入力軸と出力軸の交差角が0度のときの前記ローラ軸の方向をY軸、Z軸とY軸に直交する方向をX軸とすると、拘束条件として定義される前記ローラ溝に対する前記ローラ軸の相対運動は、少なくとも前記ローラ軸がX軸回りに回転する運動であることが望ましい。これによって、実機に対する実験結果との比較が可能であって、かつ十分な精度の解析結果を得ることができる。
【0011】
また、第1の発明では、拘束条件として定義される前記ローラ溝に対する前記ローラ軸の相対運動は、前記ローラ軸がX軸回りに回転する運動に加えて、更に、前記ローラ軸がZ軸回りに回転する運動を含むようにしても良い。これによって、全ての相対運動を考慮した実働時想定と同等の結果を得ることができる。
【0012】
第2の発明は、駆動力の伝達経路を複数有する摺動式等速ジョイントの数値解析を行う数値解析方法であって、一つの伝達経路を構成する部品である局所部品と、前記局所部品間の連結と、前記局所部品同士の相対運動とを含む局所解析モデルを定義するステップと、前記局所解析モデルから導かれる運動方程式を解くことで、一つの伝達経路のスラスト力である局所スラスト力を算出するステップと、前記局所スラスト力の位相をずらして足し合わせることで、前記摺動式等速ジョイント全体のスラスト力である全体スラスト力を算出するステップと、を含むことを特徴とする数値解析方法である。
【0013】
第3の発明は、コンピュータを第1の発明として機能させるプログラムである。
【0014】
第4の発明は、駆動力の伝達経路を複数有する摺動式等速ジョイントを試験する試験方法であって、一つの伝達経路を構成する部品である局所部品として、少なくとも、入力側となるハウジング内部に入力軸と平行に設けられるローラ溝、前記ローラ溝を摺動するローラ、前記ローラの回転軸であるローラ軸を供試体とし、前記ローラ溝に連結される中間軸を回転と摺動が可能な軸受で支持し、前記中間軸の一端に負荷ジャッキによって荷重を付加することで前記ローラ溝に前記ローラを押し付け、前記中間軸に取り付けたアームを加振することで回転を与え、前記ローラ溝を3軸荷重計に固定することで、一つの伝達経路のスラスト力である局所スラスト力を計測するステップと、前記局所スラスト力の位相をずらして足し合わせることで、前記摺動式等速ジョイント全体のスラスト力である全体スラスト力を計測するステップと、を含むことを特徴とする試験方法である。第4の発明によって、駆動力の伝達経路を複数有する摺動式等速ジョイントの実機試験において、試験装置の小規模化が可能な試験方法を提供することができる。
【発明の効果】
【0015】
本発明により、駆動力の伝達経路を複数有する摺動式等速ジョイントについて、解析モデルの編集労力の低減と計算時間の短縮が可能な数値解析装置等を提供することができる。また、駆動力の伝達経路を複数有する摺動式等速ジョイントの実機試験において、試験装置の小規模化が可能な試験方法を提供することができる。
【図面の簡単な説明】
【0016】
【図1】数値解析装置1を実現するコンピュータのハードウェア構成図
【図2】数値解析装置1の機能の概要を示すブロック図
【図3】トリポード型等速ジョイント30の一例を示す図
【図4】局所解析モデルの概念図
【図5】接触と摩擦のモデルの概念図
【図6】摩擦係数の関数を示す図
【図7】転がり摩擦の抵抗モーメントの算出を説明するための模式図
【図8】式(2)における指数mと係数Cを示す図
【図9】針状ころ37の接触モデルを説明するための模式図
【図10】入力軸38の座標系における相対運動を示す図
【図11】ピッチ角φを説明する図
【図12】ヨー角ψを説明する図
【図13】ロール角ξとローラ軸中心の変位を説明する図
【図14】試験装置の概要を示すブロック図
【図15】押付力Fxの押付荷重初期値からの変動分ΔFxと横力Fyの解析結果を示す図
【図16】局所スラスト力Fzと修正した局所スラスト力Fz’の解析結果を示す図
【図17】押付力Fxの押付荷重初期値からの変動分ΔFxと横力Fyの実験結果を示す図
【図18】修正した局所スラスト力Fz’の実験結果を示す図
【図19】設定する相対運動が異なる2種類のFz’を示す図
【図20】図19の2種類の波形の次数比分析を示す図
【図21】ヨーイングの影響度合いを示す図
【図22】ローリングの影響度合いを示す図
【図23】ローラ軸中心の変位の影響度合いを示す図
【発明を実施するための形態】
【0017】
以下図面に基づいて、本発明の実施形態を詳細に説明する。本発明の実施形態では、駆動力の伝達経路を複数有する摺動式等速ジョイントとして、トリポード型等速ジョイントを例に説明する。
【0018】
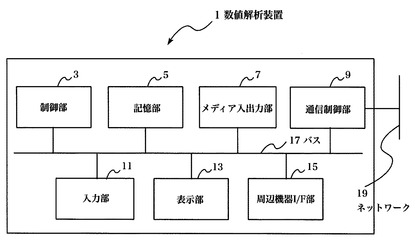
図1は、数値解析装置1を実現するコンピュータのハードウェア構成図である。尚、図1のハードウェア構成は一例であり、用途、目的に応じて様々な構成を採ることが可能である。
【0019】
数値解析装置1は、制御部3、記憶部5、メディア入出力部7、通信制御部9、入力部11、表示部13、周辺機器I/F部15等が、バス17を介して接続される。
【0020】
制御部3は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等で構成される。
【0021】
CPUは、記憶部5、ROM、記録媒体等に格納されるプログラムをRAM上のワークメモリ領域に呼び出して実行し、バス17を介して接続された各装置を駆動制御し、数値解析装置1が行う後述する処理を実現する。
ROMは、不揮発性メモリであり、コンピュータのブートプログラムやBIOS等のプログラム、データ等を恒久的に保持している。
RAMは、揮発性メモリであり、記憶部5、ROM、記録媒体等からロードしたプログラム、データ等を一時的に保持するとともに、制御部3が各種処理を行う為に使用するワークエリアを備える。
【0022】
記憶部5は、HDD(ハードディスクドライブ)であり、制御部3が実行するプログラム、プログラム実行に必要なデータ、OS(オペレーティングシステム)等が格納される。プログラムに関しては、OS(オペレーティングシステム)に相当する制御プログラムや、後述する処理をコンピュータに実行させるためのアプリケーションプログラムが格納されている。
これらの各プログラムコードは、制御部3により必要に応じて読み出されてRAMに移され、CPUに読み出されて各種の手段として実行される。
【0023】
メディア入出力部7(ドライブ装置)は、データの入出力を行い、例えば、CDドライブ(−ROM、−R、−RW等)、DVDドライブ(−ROM、−R、−RW等)、MOドライブ等のメディア入出力装置を有する。
【0024】
通信制御部9は、通信制御装置、通信ポート等を有し、コンピュータとネットワーク19間の通信を媒介する通信インタフェースであり、ネットワーク19を介して、他のコンピュータ間との通信制御を行う。
【0025】
入力部11は、データの入力を行い、例えば、キーボード、マウス等のポインティングデバイス、テンキー等の入力装置を有する。
入力部11を介して、コンピュータに対して、操作指示、動作指示、データ入力等を行うことができる。
【0026】
表示部13は、CRTモニタ、液晶パネル等のディスプレイ装置、ディスプレイ装置と連携してコンピュータのビデオ機能を実現するための論理回路等(ビデオアダプタ等)を有する。
【0027】
周辺機器I/F(インタフェース)部15は、コンピュータに周辺機器を接続させるためのポートであり、周辺機器I/F部15を介してコンピュータは周辺機器とのデータの送受信を行う。周辺機器I/F部15は、USBやIEEE1394やRS−232C等で構成されており、通常複数の周辺機器I/Fを有する。周辺機器との接続形態は有線、無線を問わない。
【0028】
バス17は、各装置間の制御信号、データ信号等の授受を媒介する経路である。
【0029】
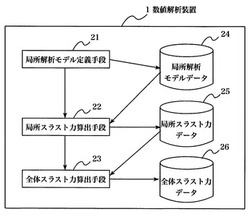
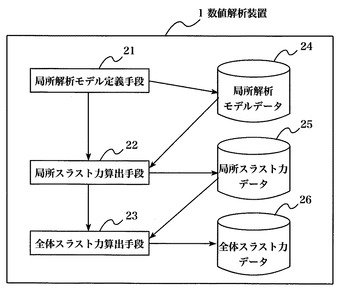
図2は、数値解析装置1の機能の概要を示すブロック図である。図2に示すように、数値解析装置1は、局所解析モデル定義手段21、局所スラスト力算出手段22、全体スラスト力算出手段23、局所解析モデルデータ24、局所スラスト力データ25、全体スラスト力データ26等を備える。
【0030】
局所解析モデル定義手段21は、トリポード型等速ジョイントにおける複数の駆動力の伝達経路のうち一つの伝達経路だけを切り出したモデル(局所解析モデル)を定義し、局所解析モデルデータ24を作成する。以下、トリポード型等速ジョイントの部品であって、一つの伝達経路を構成する部品を局所部品と呼ぶこととする。局所解析モデルは、局所部品、局所部品間の連結、局所部品同士の相対運動が定式化されたモデルである。
【0031】
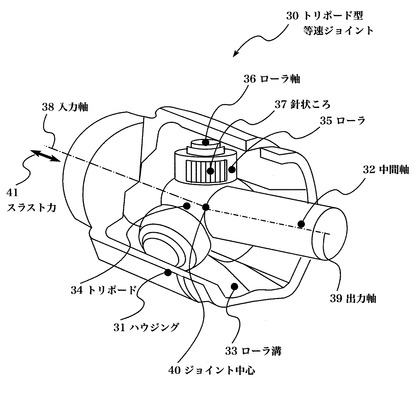
図3は、トリポード型等速ジョイント30の一例を示す図である。トリポード型等速ジョイント30は、入力側であるハウジング31、出力側である中間軸32を有する。ハウジング31には、入力軸38の円周方向に沿って互いに略等間隔となる位置に、入力軸38と略平行な3つのローラ溝33が設けられる。ローラ溝33は、ローラ35と接触する面が半円筒形状である。出力軸39となる中間軸32の一端には、3つのローラ軸36をもつトリポード34が取り付けられる。1つのローラ軸36には、数十本の針状ころ37からなる軸受を介してローラ35が配置される。車両を駆動する駆動力は、ローラ35とローラ溝33との間で入力側から出力側に伝達される。ローラ溝33には、スラスト力41が作用する。
尚、図3に示すトリポード型等速ジョイント30は一例であり、例えば、針状ころ37の代わりに、球状ころを備えるものであっても本発明を適用できる。
また、ローラ溝33とローラ35は、周方向に互いに略等間隔となる位置に配置されるとしたが、実用的な範囲で不等間隔に配置されるものであっても本発明を適用できる。
また、トリポード型等速ジョイント30はローラ35が3つであるが、実用的な範囲でローラ35が2つまたは4つなどであっても本発明を適用できる。
【0032】
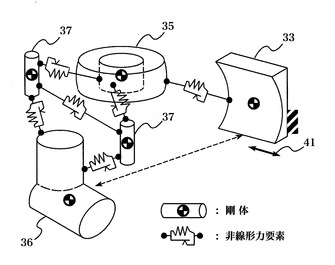
図4は、局所解析モデルの概念図である。図4は、トリポード型等速ジョイント30の一つの伝達経路をモデル化した局所解析モデルを示している。図4に示す局所解析モデルは、ローラ溝33、ローラ35、ローラ軸36、針状ころ37が剛体として定義される。また、ローラ35とローラ軸36の連結、およびローラ35とローラ溝33の連結が、接触と摩擦を模擬した非線形力要素(非線形ばね要素)として定義される。また、ローラ溝33に対するローラ軸36の相対運動が、拘束条件として定義される。
【0033】
各剛体の位置関係と接触面の形状は、実機寸法通りに与えて局所部品間の隙間を考慮する。更に、ハウジング31を全体座標系に対して完全拘束し、これと中間軸32の間に、ローラ溝33に対するローラ軸36の相対運動を駆動拘束条件として与える。
このモデルから拘束を含む多剛体系の運動方程式を導く。簡略化して2次元で記述すると、次式となる。尚、多自由度の運動方程式を精度良く取り扱う為、マルチボディダイナミクスを適用する。
【数1】

【0034】
次に、図5から図9を参照しながら、ローラ35とローラ軸36、およびローラ35とローラ溝33の接触と摩擦のモデルを詳細に説明する。
【0035】
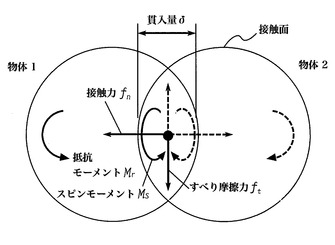
図5は、接触と摩擦のモデルの概念図である。図5に示すように、二つの剛体(物体1、物体2)に接触面の形状を定義し、それぞれの面形状が重なり合った場合に、貫入量から導かれる接触力を双方の剛体の接触点に作用させる。接触点において、接触方向の相対速度がある場合にすべり摩擦力を、接触点まわりの相対速度がある場合にスピンモーメントを作用させる。更に、接触点で二つの剛体間に転動が生じる場合に、転がり摩擦による抵抗モーメントを働かせる。以下でそれぞれの定義式について述べる。
【0036】
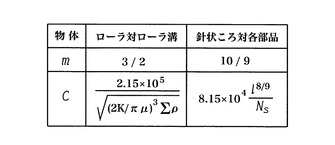
接触力fnは、次式に示す貫入量δ[mm]のべき乗関数として定義し、接触形状に合わせて指数m、係数Cを設定する。
【数2】
すべり摩擦力ftは、すべり摩擦係数μsに接触力を乗じた次式とする。
【数3】
【0037】
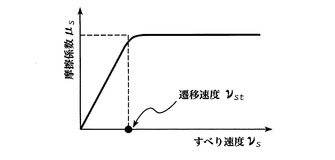
図6は、摩擦係数の関数を示す図である。横軸はすべり速度νsである。縦軸は摩擦係数μsである。式(3)において、μsには動摩擦係数のみを考慮し、相対速度0の状態から滑らかに摩擦力を作用させる。そのため、μsは、図6に示す双曲線正接関数を含んだ関数とする。
【0038】
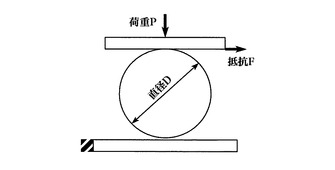
図7は、転がり摩擦の抵抗モーメントの算出を説明するための模式図である。図7に示すように、直径Dのころを2枚の平板で挟み、荷重Pをかけた状態で片側の平板を動かすときの抵抗力をFとすると、転がり摩擦係数μrはμr=F/Pとなる。このときの抵抗モーメントは、FとDとの積であるが、二つの剛体間で考えると接触点が一点になるため、抵抗力をF/2とおいてからFを消去すると、Mrは次式となる。
【数4】
尚、転がり摩擦係数μrも、μsと同様に双曲線正接関数を利用した相対的な転動速度の関数として扱う。
【0039】
次に、ローラ35対ローラ溝33の接触モデルについて述べる。ローラ35の面形状を球とし、ローラ溝33の面形状を半円筒として定義する。このときの弾性接近量δro[mm]は、鋼材の場合、ヘルツの理論によって次式となる。
【数5】
ここで、ρ[1/mm]は面形状の曲率、2K/πμは曲率より定まる係数である。
【0040】
図8は、式(2)における指数mと係数Cを示す図である。式(5)を式(2)の形に変形すると、指数mと係数Cは、図8に示すローラ35対ローラ溝33の値となる。
【0041】
ローラ35の面形状を球、ローラ溝33の面形状を半円筒と定義したことから、球と半円筒との接触であるため、短径に対する長径の比が20程度の細長い接触楕円となる。このとき、長径を2a[mm]とし、スピンモーメントMsを次式にて近似する。
【数6】
ヘルツの理論によって、鋼材の場合、面形状の曲率より定まる係数μを用いて、長径2aは次式となる。
【数7】
最終的に、スピンモーメントMsは、次式とおける。
【数8】
【0042】
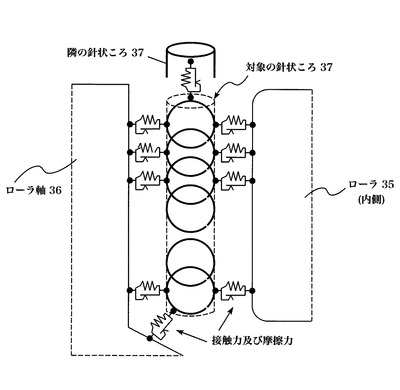
次に、針状ころ37と各部品の接触モデルについて述べる。図9は、針状ころ37の接触モデルを説明するための模式図である。
円筒形状の一つの針状ころ37は、いずれも円筒形状のローラ軸36、ローラ35の内周面、両隣の針状ころ37と接触する。隙間が考慮され、針状ころ37自体が自由度を持つため、2軸が平行な場合の線接触、2軸が同一平面内で傾く場合の一様でない線接触、2軸がねじれの位置にある場合の点接触など、様々な接触が発生する。
こうした現象を効率的に模擬するため、線接触を離散的に扱い、複数の点接触によって近似するモデル化手法である特許文献1に記載の技術を用いる。
【0043】
図9に示すように、針状ころ37の径と同じ径のNs個の球を並べた面形状を、円筒形の慣性特性を有する1個の剛体に対して設定し、個々の球と円筒との接触を定義する。接触先の円筒は、ローラ軸36、ローラ35の内周面、隣の針状ころ37である。また、ローラ軸36のフランジおよびリテーナと、両端の球との接触も考慮し、針状ころ37の飛び出しを防ぐ。尚、1軸の軸受を構成するには、1本のローラ軸36に使われる針状ころ37の本数Nnと同数のモデルが必要となる。
次に、個々の球の接触力を定式化する。平行な2円筒間の弾性接近量δne[mm]は、両円筒の曲率と無関係であり、荷重と線接触長さに関係する。これより、鋼材の場合、球1個の接触力fn、接触部の長さl[mm]について次式となる。
【数9】
これを式(2)の形にすると、図8に示すm、Cとなる。
【0044】
次に、図10から図13を参照しながら、ローラ溝33に対するローラ軸36の相対運動を詳細に説明する。
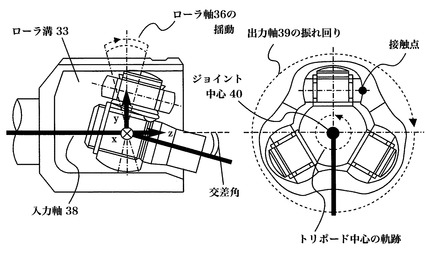
スラスト力41による横揺れ振動が起こる実働時(加速時)のジョイントを想定すると、ハウジング31は、交差角が付いた状態の出力軸39に対し、回転と同方向にトルクを伝達する。
【0045】
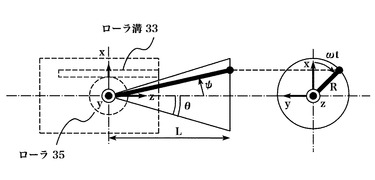
図10は、入力軸38の座標系における相対運動を示す図である。図10に示すように、入力軸38の座標系で考えると、回転が反時計回りのとき、出力軸39は時計回りに振れ回ることになる。更に、出力軸39が1回振れ回る間に、ローラ軸36およびローラ35がローラ溝33内を1往復するとともに、ジョイント中心40に対して偏心した位置にあるトリポード中心が2回公転することが知られている。出力軸39から見ると、トリポード中心の軌跡は円形となり、公転方向は回転方向と同じく反時計回りである。これらの知見を基に、ローラ軸36の挙動を定式化すると以下のようになる。
尚、図10では、入力軸38の方向をZ軸、入力軸38と出力軸39の交差角が0度のときのローラ軸36の方向をY軸、Z軸とY軸に直交する方向をX軸とする。また、ローラ軸36のx軸回りの回転をピッチング、y軸回りの回転をヨーイング、z軸回りの回転をローリングとする。
【0046】
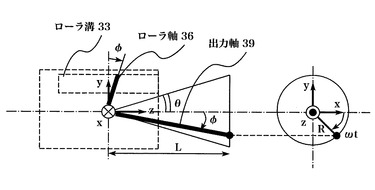
図11は、ピッチ角φを説明する図である。出力軸39の振れ回りに伴うローラ軸36のピッチ角φは、図11から分かる通り次式となる。
【数10】
ここで、θは交差角、ωは出力軸39の振れ回り角速度、tは時間である。RとLはθに関係する変数であり、出力軸39端の公転半径とz方向長である。φ、θが小さい場合、次式で近似できる。
【数11】
【0047】
図12は、ヨー角ψを説明する図である。出力軸39の振れ回りにより、ヨーイングも生じる。図12から分かる通り、ヨー角ψは次式となる。
【数12】
ピッチ角φと同様に、ψ、θが小さい場合、次式で近似できる。
【数13】
【0048】
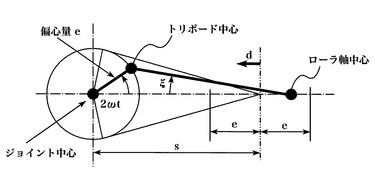
図13は、ロール角ξとローラ軸中心の変位を説明する図である。偏心したトリポード中心が公転することにより、ローラ軸36の挙動はローリングと各方向の変位を複合したものとなる。図13は、トリポード中心とローラ軸中心の挙動を出力軸39基準で示している。荷重伝達状態におけるローラ軸中心の変位はローラ軸方向のみと仮定すると、ロール角ξは次式となる。
【数14】
ここでeはトリポード中心の偏心量、sはトリポード中心からローラ軸中心までの距離である。ξが微小角であること、及び従来からの知見より、e=s(1−cosθ)/(2cosθ)となることから、式(14)は次式で近似できる。
【数15】
次に、ローラ軸方向の変位dを次式で示す。
【数16】
ξが微小角の場合、cosξ≒1であることから、次式となる。
【数17】
【0049】
図2の説明に戻る。局所スラスト力算出手段22は、局所解析モデルから導かれる運動方程式を解くことで、一つの伝達経路のスラスト力である局所スラスト力を算出し、局所スラスト力データ25を作成する。
ローラ35からローラ溝33に作用する力を入力軸38の座標系に従って定義したとき、x軸方向の力が押付力Fx、y軸方向の力が横力Fy、z軸方向の力が局所スラスト力Fzである。
局所スラスト力算出手段22は、汎用の機構運動解析ソフトウェアの機能を用いても良いし、解析対象ごとに専用のプログラムを組んでも良い。但し、本発明は、特定のソフトウェアに限定されるものではない。
【0050】
全体スラスト力算出手段23は、局所スラスト力の位相をずらして足し合わせることで、摺動式等速ジョイント30全体のスラスト力である全体スラスト力を算出し、全体スラスト力データ26を作成する。
【0051】
数値解析装置1の制御部3は、局所解析モデル定義手段21によって、局所解析モデルデータ24を作成し、作成した局所解析モデルデータ24を記憶部5に記憶する。局所解析モデルデータ24の作成に必要なデータは、入力部11等を介して入力する。次に、制御部3は、局所解析モデルデータ24に基づいて、局所スラスト力算出手段22によって、運動方程式を解くことで、局所スラスト力データ25を作成し、作成した局所スラスト力データ25を記憶部5に記憶する。次に、制御部3は、局所スラスト力データ25に基づいて、全体スラスト力算出手段23によって、全体スラスト力データ26を作成し、作成した全体スラスト力データ26を記憶部5に記憶する。作成したデータは、表示部13等に表示するなど、所望の方法で出力可能である。
【0052】
一つの伝達経路のスラスト力である局所スラスト力の位相をずらして足し合わせることで全体スラスト力を算出できる理由は、本発明者らの研究で得られた知見によるものである。尚、これらの知見は特許文献1に記載されている為、以下では概要を説明する。
まず、全体スラスト力の波形において、1回転に3回変動する回転3次成分が顕著に現れることが分かった。また、回転3次成分はそれぞれのローラ溝33で発生することが分かった。更に、3つの溝が略等間隔に配置されることに伴い、3つのローラ溝33で発生する回転3次成分の波形の位相差は、それぞれ120度であることが分かった。これらの知見によって、一つの伝達経路のスラスト力である局所スラスト力の波形のみを算出し、算出した波形の位相を120度ずつずらして足し合わせることで、全体スラスト力を算出することができる。
【0053】
本実施形態における数値解析方法では、解析結果の精度を保ちながら、トリポード型等速ジョイント30であれば、モデルの編集作業が1/3程度に軽減される。また、計算時間も同様に1/3程度に短縮される。
【0054】
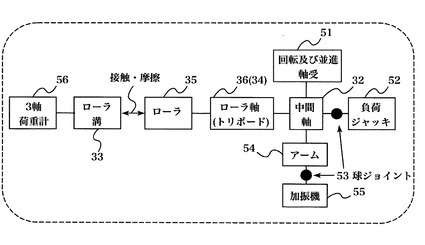
次に、図14を参照しながら、実機の試験方法について説明する。図14は、試験装置の概要を示すブロック図である。本実施の形態では、ドライブシャフト全体としての試験を行う特許文献2と異なり、トリポード型等速ジョイント30のみを対象として試験を行うものである。特に、トリポード型等速ジョイント30の一つの伝達経路を構成する部品である局所部品のみを供試体とするものである。供試体とする局所部品は、少なくとも、入力側となるハウジング31内部に入力軸38と平行に設けられるローラ溝33、ローラ溝33を摺動するローラ35、ローラ35の回転軸であるローラ軸36である。
【0055】
図14に示すように、中間軸32には一つのローラ軸36を有するトリポード34が連結される。ローラ軸36には、針状ころ(不図示)等を介してローラ35が配置される。ローラ溝33は、圧電型の3軸荷重計56に固定される。
中間軸32は、回転と摺動が可能な回転及び並進軸受51で支持される。また、中間軸32の一端には、球ジョイント53を介して負荷ジャッキ52が配置される。また、中間軸32にはアーム54が取り付けられる。アーム54には、球ジョイント53を介して加振機55が配置される。
【0056】
図14において、紙面の左右方向をX軸、紙面の前後方向をY軸、紙面の上下方向をZ軸とする。
試験方法は、まず、負荷ジャッキ52によって中間軸32に荷重を付加し、ローラ溝33にローラ35を押し付ける。次に、中間軸32に取り付けたアーム54を加振することで回転を与える。これにより、中間軸32の振れ回りが発生し、これに伴いローラ軸36のX軸回りの回転であるピッチングが発生する。そして、3軸荷重計56によって、x軸方向の力を押付力Fx、y軸方向の力を横力Fy、z軸方向の力を局所スラスト力Fzとして分離計測する。
更に、計測された局所スラスト力Fzの位相をずらして足し合わせることで、摺動式等速ジョイント30全体のスラスト力である全体スラスト力を計測する。
【0057】
スラスト力は交差角θに依存して変化するので、特許文献2などに記載の従来技術による試験方法では、試験装置によって交差角θを変えながら試験を行う必要があった。従って、従来技術による試験方法では、交差角を変えるための試験装置が必要であった。一方、本実施形態の試験方法では、図14に示す通り、交差角を変えるための試験装置が不要である。これは、式(11)を見れば分かる通り、ピッチ角φは交差角θで表されることから、ピッチングを考慮してピッチ角φを変えることによって、交差角θを変えることと同等の結果を得ることができるからである。ピッチ角φは、加振機55による加振力を変えることで、所望の値に変えることができる。従って、本試験方法では、大がかりな装置を必要とせず、容易にスラスト力の試験を行うことができる。
【実施例】
【0058】
以下では、数値解析による解析結果と実機に対する実験結果を比較しながら、本発明の実施例について説明する。
【0059】
<数値解析による解析条件>
数値解析による解析条件としては、ローラ軸36の強制変位により、所定の荷重にてローラ35をローラ溝33に押し付け、ローラ溝33に対するローラ軸36の相対運動をローラ軸36とハウジング31の間に与える。尚、実機に対する実験結果との比較が可能なピッチングのみを拘束条件とする。
【0060】
本実施例では、押付荷重の初期値を1000N、出力軸39の振れ回り角速度ωを20πrad/s(角周波数10Hz)、軸交差角θを10度とした。各部品の位置と形状については、1軸の針状ころ数Nnが46である市販ジョイントの寸法(公差中央値)を用いた。針状ころモデルの球の数Nsは7とした。摩擦係数の値として、ローラ35とローラ溝33の間のすべり摩擦は0.055、針状ころ37と各部品の間のすべり摩擦では0.050、転がり摩擦は全て0.002とした。これらはグリースを付けた試験片による実測値である。また、低い相対速度でも摩擦力を作用させるため、摩擦係数が一定となる速度νst(図6参照)を解析中の最大すべり速度の1/4となるように設定した。転がり摩擦でも同様とした。
【0061】
<数値解析による解析結果>
ローラ35からローラ溝33に作用する力を入力軸38の座標系に従って定義し、押付力Fx、横力Fy、局所スラスト力Fzとする。
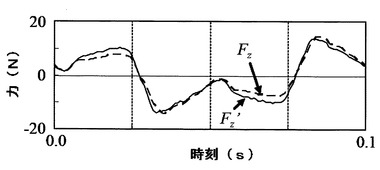
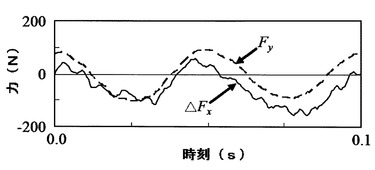
図15は、押付力Fxの押付荷重初期値からの変動分ΔFxと横力Fyの解析結果を示す図である。また、図16は、局所スラスト力Fzと修正した局所スラスト力Fz’の解析結果を示す図である。図15と図16に示す結果は、両方とも解析開始から2往復目の結果である。修正した局所スラスト力Fz’は、押付荷重初期値からの変動分ΔFxの影響を排除する為、各解析出力時間においてFzをFxで除した後に押付荷重初期値を乗じて換算したものである。図16に示すように、修正によって波形の特徴に変化はないことから、以下では、Fz’を用いて解析結果を説明する。
【0062】
<実機に対する実験結果と検証>
実機に対する実験方法は、図14を参照して説明した通りである。本実施例では、数値解析と同じ条件でローラ溝33に対する作用力を測定する。
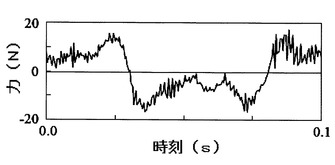
図17は、押付力Fxの押付荷重初期値からの変動分ΔFxと横力Fyの実験結果を示す図である。図15の解析結果と比較すると、ΔFxとFyの両方とも、変動する位相はほぼ一致するが、変動の幅は異なった。特に、図15の解析結果によるΔFxは、図17の実験結果の2倍となった。この理由は、実験装置の弾性変形の影響である。数値解析による局所解析モデルでは、梁要素により中間軸32の剛性を考慮しているが、実験装置を構成する負荷ジャッキ52や、各種装置を支持する鋼性ブロック(不図示)等の剛性まで模擬できていない。従って、各支持部が剛であり、変動が大きくなったと考えられる。
【0063】
図18は、修正した局所スラスト力Fz’の実験結果を示す図である。図16の解析結果と比較すると、Fz’の位相、振幅ともに良く一致しており、概形もほぼ一致した。このように、数値解析において、拘束条件として定義されるローラ溝33に対するローラ軸36の相対運動としてピッチングのみを考慮しても、十分な精度の解析結果を得ることができる。
【0064】
<数値解析による実働時の解析結果>
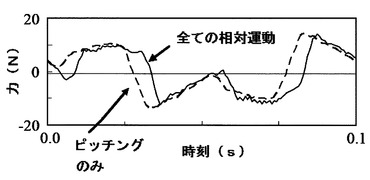
図19は、設定する相対運動が異なる2種類のFz’を示す図である。図19の実線は、ジョイント実働時を想定して全ての相対運動を考慮した波形である。図19の破線は、ピッチングのみを考慮した波形であり、図16のFz’に相当する。図19の実線と破線を比較すると、波形の振幅はほぼ同じであり、位相が異なる。図19から、全ての相対運動(ピッチング、ヨーイング、ローリング、ローラ軸中心の変位)の中で、ピッチングが支配的であると考えられる。
【0065】
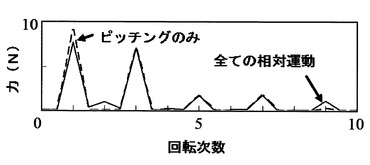
図20は、図19の2種類の波形の次数比分析を示す図である。図20に示す通り、全ての相対運動を考慮した波形とピッチングのみを考慮した波形の両方とも、回転1次と回転3次の成分が顕著に現れた。実働時のジョイントでは、ローラ35とローラ溝33が略等間隔に3組配置されることで1/3周期ずつ位相がずれるため、回転3次成分の位相は重なり合って3倍の振幅となる。一方、回転1次成分はほぼ打ち消される。従って、スラスト力は回転3次が主成分となる。
【0066】
<ローラ35のすべり摩擦力の発生要因>
スラスト力の回転3次成分の主要因は、ローラ35とローラ溝33のすべり摩擦力である(特許文献1参照)。本実施例の数値解析においても、各接触部の摩擦係数に関するパラメータスタディにより確認したところ、実働時想定の解析結果では、回転3次成分の実効値のうち92%がローラ35のすべり摩擦力によるものであった。そこで、考慮する摩擦をローラ35とローラ溝33のすべり摩擦力のみに絞り込み、各相対運動の影響度合いを検討する。
【0067】
図21は、ヨーイングの影響度合いを示す図である。図21では、図19と同様、実線が全ての相対運動を考慮した波形、破線がピッチングのみを考慮した波形である。また、太線がピッチングとヨーイングを考慮した波形である。図21に示す通り、ピッチングとヨーイングを考慮した波形(太線)は、ピッチングのみの波形(破線)と位相が一致するが、全ての相対運動を考慮した波形(実線)とは位相が一致しない。
【0068】
図22は、ローリングの影響度合いを示す図である。図22では、図19と同様、実線が全ての相対運動を考慮した波形、破線がピッチングのみを考慮した波形である。また、太線がピッチングとローリングを考慮した波形である。図22に示す通り、ピッチングとローリングを考慮した波形(太線)は、ピッチングのみの波形(破線)と位相が一致しないが、全ての相対運動を考慮した波形(実線)とは位相が一致する。
【0069】
図23は、ローラ軸中心の変位の影響度合いを示す図である。図23では、図19と同様、実線が全ての相対運動を考慮した波形、破線がピッチングのみを考慮した波形である。また、太線がピッチングとローラ軸中心の変位を考慮した波形である。図23に示す通り、ピッチングとローラ軸中心の変位を考慮した波形(太線)は、ピッチングのみの波形(破線)と位相が一致するが、全ての相対運動を考慮した波形(実線)とは位相が一致しない。
【0070】
図21から図23に示す通り、ピッチングに加えてローリングを考慮することで、実働時想定の波形(全ての相対運動を考慮した波形)と位相が一致することが分かった。すなわち、数値解析では、拘束条件として定義されるローラ溝33に対するローラ軸36の相対運動として、ピッチングとローリングを考慮することで、実働時想定と同等の結果を得ることができる。
【0071】
本発明における数値解析方法、および実機による試験方法は、トリポード型等速ジョイント30の開発・設計段階において、スラスト力を解析するために有用である。また、トリポード型等速ジョイント30の耐久試験などにも用いることができる。
【0072】
以上、添付図面を参照しながら、本発明に係る数値解析装置等の好適な実施形態について説明したが、本発明はかかる例に限定されない。当業者であれば、本願で開示した技術的思想の範疇内において、各種の変更例又は修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【符号の説明】
【0073】
21………局所解析モデル定義手段
22………局所スラスト力算出手段
23………全体スラスト力算出手段
24………局所解析モデルデータ
25………局所スラスト力データ
26………全体スラスト力データ
30………トリポード型等速ジョイント
31………ハウジング
32………中間軸
33………ローラ溝
34………トリポード
35………ローラ
36………ローラ軸
37………針状ころ
38………入力軸
39………出力軸
40………ジョイント中心
41………スラスト力
51………回転及び並進軸受
52………負荷ジャッキ
53………球ジョイント
54………アーム
55………加振機
56………3軸荷重計
【技術分野】
【0001】
本発明は、駆動力の伝達経路を複数有する摺動式等速ジョイントの数値解析を行う数値解析装置等、および駆動力の伝達経路を複数有する摺動式等速ジョイントを試験する試験方法に関するものである。
【背景技術】
【0002】
駆動力の伝達経路を複数有する摺動式等速ジョイントとしては、トリポード型等速ジョイントがある。トリポード型等速ジョイントは、例えば前輪駆動車のドライブシャフトに用いられる。トリポード型等速ジョイントは、駆動力伝達時に車両の横揺れ振動をもたらすスラスト力を誘起することが知られている。近年、スラスト力が低減されたトリポード型等速ジョイントを開発するため、ジョイント全体の解析モデルを作成し、機構運動解析ソフトウェアによる数値解析が行われている。機構運動解析ソフトウェアによる数値解析では、部品間の接触や摩擦を考慮し、入力軸に回転を与え、出力側に負荷トルクを与えた状態で接触力や摩擦力を計算する。解析モデルの作成方法の従来技術としては、本発明者らによる特許文献1がある。
【0003】
一方、実機の等速ジョイントを試験する場合、等速ジョイント用に市販されている汎用の試験装置を用いて、接触力や摩擦力を計測する。等速ジョイントの試験方法の従来技術としては、精度良く品質の検査を行うことを目的とした特許文献2がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特願2008−219027号公報
【特許文献2】特開平08−210949号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来技術における解析モデルの作成方法では、トリポード型等速ジョイントを構成する全ての部品間について接触と摩擦を模擬する必要があるため、解析モデルが詳細かつ大規模となり、解析モデルの編集作業に多大な労力がかかる。また、このような大規模な解析モデルに対しては、多大な計算時間を要する。
【0006】
また、従来技術における試験方法では、等速ジョイント単体あるいは等速ジョイントを含めたドライブシャフト全体としての試験しか行うことができず、試験装置も大掛かりなものとなる。また、等速ジョイントの内部挙動を可視化するためには、回転体から信号を取り出す必要があることから、スリップリングや無線テレメータなどを用いることになる。この場合、出力結果にはノイズが混入することやチャネル数が制限される等の問題がある。
【0007】
本発明は、前述した問題点に鑑みてなされたもので、その目的とすることは、駆動力の伝達経路を複数有する摺動式等速ジョイントについて、解析モデルの編集労力の低減と計算時間の短縮が可能な数値解析装置等を提供することである。また、別の目的は、駆動力の伝達経路を複数有する摺動式等速ジョイントの実機試験において、試験装置の小規模化が可能な試験方法を提供することである。
【課題を解決するための手段】
【0008】
前述した目的を達成するために第1の発明は、駆動力の伝達経路を複数有する摺動式等速ジョイントの数値解析を行う数値解析装置であって、一つの伝達経路を構成する部品である局所部品と、前記局所部品間の連結と、前記局所部品同士の相対運動とを含む局所解析モデルを定義する手段と、前記局所解析モデルから導かれる運動方程式を解くことで、一つの伝達経路のスラスト力である局所スラスト力を算出する手段と、前記局所スラスト力の位相をずらして足し合わせることで、前記摺動式等速ジョイント全体のスラスト力である全体スラスト力を算出する手段と、を具備することを特徴とする数値解析装置である。第1の発明によって、解析モデルの編集労力の低減と計算時間の短縮が可能な数値解析装置を提供することができる。
【0009】
第1の発明では、前記局所部品として、少なくとも、入力側となるハウジング内部に入力軸と平行に設けられるローラ溝、前記ローラ溝を摺動するローラ、前記ローラの回転軸であるローラ軸が含まれ、前記局所解析モデルは、前記局所部品が剛体として定義され、前記ローラと前記ローラ軸の連結、および前記ローラと前記ローラ溝の連結が接触と摩擦を模擬した非線形ばね要素として定義され、前記ローラ溝に対する前記ローラ軸の相対運動が拘束条件として定義される。
【0010】
第1の発明では、入力軸の座標系において、入力軸の方向をZ軸、入力軸と出力軸の交差角が0度のときの前記ローラ軸の方向をY軸、Z軸とY軸に直交する方向をX軸とすると、拘束条件として定義される前記ローラ溝に対する前記ローラ軸の相対運動は、少なくとも前記ローラ軸がX軸回りに回転する運動であることが望ましい。これによって、実機に対する実験結果との比較が可能であって、かつ十分な精度の解析結果を得ることができる。
【0011】
また、第1の発明では、拘束条件として定義される前記ローラ溝に対する前記ローラ軸の相対運動は、前記ローラ軸がX軸回りに回転する運動に加えて、更に、前記ローラ軸がZ軸回りに回転する運動を含むようにしても良い。これによって、全ての相対運動を考慮した実働時想定と同等の結果を得ることができる。
【0012】
第2の発明は、駆動力の伝達経路を複数有する摺動式等速ジョイントの数値解析を行う数値解析方法であって、一つの伝達経路を構成する部品である局所部品と、前記局所部品間の連結と、前記局所部品同士の相対運動とを含む局所解析モデルを定義するステップと、前記局所解析モデルから導かれる運動方程式を解くことで、一つの伝達経路のスラスト力である局所スラスト力を算出するステップと、前記局所スラスト力の位相をずらして足し合わせることで、前記摺動式等速ジョイント全体のスラスト力である全体スラスト力を算出するステップと、を含むことを特徴とする数値解析方法である。
【0013】
第3の発明は、コンピュータを第1の発明として機能させるプログラムである。
【0014】
第4の発明は、駆動力の伝達経路を複数有する摺動式等速ジョイントを試験する試験方法であって、一つの伝達経路を構成する部品である局所部品として、少なくとも、入力側となるハウジング内部に入力軸と平行に設けられるローラ溝、前記ローラ溝を摺動するローラ、前記ローラの回転軸であるローラ軸を供試体とし、前記ローラ溝に連結される中間軸を回転と摺動が可能な軸受で支持し、前記中間軸の一端に負荷ジャッキによって荷重を付加することで前記ローラ溝に前記ローラを押し付け、前記中間軸に取り付けたアームを加振することで回転を与え、前記ローラ溝を3軸荷重計に固定することで、一つの伝達経路のスラスト力である局所スラスト力を計測するステップと、前記局所スラスト力の位相をずらして足し合わせることで、前記摺動式等速ジョイント全体のスラスト力である全体スラスト力を計測するステップと、を含むことを特徴とする試験方法である。第4の発明によって、駆動力の伝達経路を複数有する摺動式等速ジョイントの実機試験において、試験装置の小規模化が可能な試験方法を提供することができる。
【発明の効果】
【0015】
本発明により、駆動力の伝達経路を複数有する摺動式等速ジョイントについて、解析モデルの編集労力の低減と計算時間の短縮が可能な数値解析装置等を提供することができる。また、駆動力の伝達経路を複数有する摺動式等速ジョイントの実機試験において、試験装置の小規模化が可能な試験方法を提供することができる。
【図面の簡単な説明】
【0016】
【図1】数値解析装置1を実現するコンピュータのハードウェア構成図
【図2】数値解析装置1の機能の概要を示すブロック図
【図3】トリポード型等速ジョイント30の一例を示す図
【図4】局所解析モデルの概念図
【図5】接触と摩擦のモデルの概念図
【図6】摩擦係数の関数を示す図
【図7】転がり摩擦の抵抗モーメントの算出を説明するための模式図
【図8】式(2)における指数mと係数Cを示す図
【図9】針状ころ37の接触モデルを説明するための模式図
【図10】入力軸38の座標系における相対運動を示す図
【図11】ピッチ角φを説明する図
【図12】ヨー角ψを説明する図
【図13】ロール角ξとローラ軸中心の変位を説明する図
【図14】試験装置の概要を示すブロック図
【図15】押付力Fxの押付荷重初期値からの変動分ΔFxと横力Fyの解析結果を示す図
【図16】局所スラスト力Fzと修正した局所スラスト力Fz’の解析結果を示す図
【図17】押付力Fxの押付荷重初期値からの変動分ΔFxと横力Fyの実験結果を示す図
【図18】修正した局所スラスト力Fz’の実験結果を示す図
【図19】設定する相対運動が異なる2種類のFz’を示す図
【図20】図19の2種類の波形の次数比分析を示す図
【図21】ヨーイングの影響度合いを示す図
【図22】ローリングの影響度合いを示す図
【図23】ローラ軸中心の変位の影響度合いを示す図
【発明を実施するための形態】
【0017】
以下図面に基づいて、本発明の実施形態を詳細に説明する。本発明の実施形態では、駆動力の伝達経路を複数有する摺動式等速ジョイントとして、トリポード型等速ジョイントを例に説明する。
【0018】
図1は、数値解析装置1を実現するコンピュータのハードウェア構成図である。尚、図1のハードウェア構成は一例であり、用途、目的に応じて様々な構成を採ることが可能である。
【0019】
数値解析装置1は、制御部3、記憶部5、メディア入出力部7、通信制御部9、入力部11、表示部13、周辺機器I/F部15等が、バス17を介して接続される。
【0020】
制御部3は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等で構成される。
【0021】
CPUは、記憶部5、ROM、記録媒体等に格納されるプログラムをRAM上のワークメモリ領域に呼び出して実行し、バス17を介して接続された各装置を駆動制御し、数値解析装置1が行う後述する処理を実現する。
ROMは、不揮発性メモリであり、コンピュータのブートプログラムやBIOS等のプログラム、データ等を恒久的に保持している。
RAMは、揮発性メモリであり、記憶部5、ROM、記録媒体等からロードしたプログラム、データ等を一時的に保持するとともに、制御部3が各種処理を行う為に使用するワークエリアを備える。
【0022】
記憶部5は、HDD(ハードディスクドライブ)であり、制御部3が実行するプログラム、プログラム実行に必要なデータ、OS(オペレーティングシステム)等が格納される。プログラムに関しては、OS(オペレーティングシステム)に相当する制御プログラムや、後述する処理をコンピュータに実行させるためのアプリケーションプログラムが格納されている。
これらの各プログラムコードは、制御部3により必要に応じて読み出されてRAMに移され、CPUに読み出されて各種の手段として実行される。
【0023】
メディア入出力部7(ドライブ装置)は、データの入出力を行い、例えば、CDドライブ(−ROM、−R、−RW等)、DVDドライブ(−ROM、−R、−RW等)、MOドライブ等のメディア入出力装置を有する。
【0024】
通信制御部9は、通信制御装置、通信ポート等を有し、コンピュータとネットワーク19間の通信を媒介する通信インタフェースであり、ネットワーク19を介して、他のコンピュータ間との通信制御を行う。
【0025】
入力部11は、データの入力を行い、例えば、キーボード、マウス等のポインティングデバイス、テンキー等の入力装置を有する。
入力部11を介して、コンピュータに対して、操作指示、動作指示、データ入力等を行うことができる。
【0026】
表示部13は、CRTモニタ、液晶パネル等のディスプレイ装置、ディスプレイ装置と連携してコンピュータのビデオ機能を実現するための論理回路等(ビデオアダプタ等)を有する。
【0027】
周辺機器I/F(インタフェース)部15は、コンピュータに周辺機器を接続させるためのポートであり、周辺機器I/F部15を介してコンピュータは周辺機器とのデータの送受信を行う。周辺機器I/F部15は、USBやIEEE1394やRS−232C等で構成されており、通常複数の周辺機器I/Fを有する。周辺機器との接続形態は有線、無線を問わない。
【0028】
バス17は、各装置間の制御信号、データ信号等の授受を媒介する経路である。
【0029】
図2は、数値解析装置1の機能の概要を示すブロック図である。図2に示すように、数値解析装置1は、局所解析モデル定義手段21、局所スラスト力算出手段22、全体スラスト力算出手段23、局所解析モデルデータ24、局所スラスト力データ25、全体スラスト力データ26等を備える。
【0030】
局所解析モデル定義手段21は、トリポード型等速ジョイントにおける複数の駆動力の伝達経路のうち一つの伝達経路だけを切り出したモデル(局所解析モデル)を定義し、局所解析モデルデータ24を作成する。以下、トリポード型等速ジョイントの部品であって、一つの伝達経路を構成する部品を局所部品と呼ぶこととする。局所解析モデルは、局所部品、局所部品間の連結、局所部品同士の相対運動が定式化されたモデルである。
【0031】
図3は、トリポード型等速ジョイント30の一例を示す図である。トリポード型等速ジョイント30は、入力側であるハウジング31、出力側である中間軸32を有する。ハウジング31には、入力軸38の円周方向に沿って互いに略等間隔となる位置に、入力軸38と略平行な3つのローラ溝33が設けられる。ローラ溝33は、ローラ35と接触する面が半円筒形状である。出力軸39となる中間軸32の一端には、3つのローラ軸36をもつトリポード34が取り付けられる。1つのローラ軸36には、数十本の針状ころ37からなる軸受を介してローラ35が配置される。車両を駆動する駆動力は、ローラ35とローラ溝33との間で入力側から出力側に伝達される。ローラ溝33には、スラスト力41が作用する。
尚、図3に示すトリポード型等速ジョイント30は一例であり、例えば、針状ころ37の代わりに、球状ころを備えるものであっても本発明を適用できる。
また、ローラ溝33とローラ35は、周方向に互いに略等間隔となる位置に配置されるとしたが、実用的な範囲で不等間隔に配置されるものであっても本発明を適用できる。
また、トリポード型等速ジョイント30はローラ35が3つであるが、実用的な範囲でローラ35が2つまたは4つなどであっても本発明を適用できる。
【0032】
図4は、局所解析モデルの概念図である。図4は、トリポード型等速ジョイント30の一つの伝達経路をモデル化した局所解析モデルを示している。図4に示す局所解析モデルは、ローラ溝33、ローラ35、ローラ軸36、針状ころ37が剛体として定義される。また、ローラ35とローラ軸36の連結、およびローラ35とローラ溝33の連結が、接触と摩擦を模擬した非線形力要素(非線形ばね要素)として定義される。また、ローラ溝33に対するローラ軸36の相対運動が、拘束条件として定義される。
【0033】
各剛体の位置関係と接触面の形状は、実機寸法通りに与えて局所部品間の隙間を考慮する。更に、ハウジング31を全体座標系に対して完全拘束し、これと中間軸32の間に、ローラ溝33に対するローラ軸36の相対運動を駆動拘束条件として与える。
このモデルから拘束を含む多剛体系の運動方程式を導く。簡略化して2次元で記述すると、次式となる。尚、多自由度の運動方程式を精度良く取り扱う為、マルチボディダイナミクスを適用する。
【数1】
【0034】
次に、図5から図9を参照しながら、ローラ35とローラ軸36、およびローラ35とローラ溝33の接触と摩擦のモデルを詳細に説明する。
【0035】
図5は、接触と摩擦のモデルの概念図である。図5に示すように、二つの剛体(物体1、物体2)に接触面の形状を定義し、それぞれの面形状が重なり合った場合に、貫入量から導かれる接触力を双方の剛体の接触点に作用させる。接触点において、接触方向の相対速度がある場合にすべり摩擦力を、接触点まわりの相対速度がある場合にスピンモーメントを作用させる。更に、接触点で二つの剛体間に転動が生じる場合に、転がり摩擦による抵抗モーメントを働かせる。以下でそれぞれの定義式について述べる。
【0036】
接触力fnは、次式に示す貫入量δ[mm]のべき乗関数として定義し、接触形状に合わせて指数m、係数Cを設定する。
【数2】
すべり摩擦力ftは、すべり摩擦係数μsに接触力を乗じた次式とする。
【数3】
【0037】
図6は、摩擦係数の関数を示す図である。横軸はすべり速度νsである。縦軸は摩擦係数μsである。式(3)において、μsには動摩擦係数のみを考慮し、相対速度0の状態から滑らかに摩擦力を作用させる。そのため、μsは、図6に示す双曲線正接関数を含んだ関数とする。
【0038】
図7は、転がり摩擦の抵抗モーメントの算出を説明するための模式図である。図7に示すように、直径Dのころを2枚の平板で挟み、荷重Pをかけた状態で片側の平板を動かすときの抵抗力をFとすると、転がり摩擦係数μrはμr=F/Pとなる。このときの抵抗モーメントは、FとDとの積であるが、二つの剛体間で考えると接触点が一点になるため、抵抗力をF/2とおいてからFを消去すると、Mrは次式となる。
【数4】
尚、転がり摩擦係数μrも、μsと同様に双曲線正接関数を利用した相対的な転動速度の関数として扱う。
【0039】
次に、ローラ35対ローラ溝33の接触モデルについて述べる。ローラ35の面形状を球とし、ローラ溝33の面形状を半円筒として定義する。このときの弾性接近量δro[mm]は、鋼材の場合、ヘルツの理論によって次式となる。
【数5】
ここで、ρ[1/mm]は面形状の曲率、2K/πμは曲率より定まる係数である。
【0040】
図8は、式(2)における指数mと係数Cを示す図である。式(5)を式(2)の形に変形すると、指数mと係数Cは、図8に示すローラ35対ローラ溝33の値となる。
【0041】
ローラ35の面形状を球、ローラ溝33の面形状を半円筒と定義したことから、球と半円筒との接触であるため、短径に対する長径の比が20程度の細長い接触楕円となる。このとき、長径を2a[mm]とし、スピンモーメントMsを次式にて近似する。
【数6】
ヘルツの理論によって、鋼材の場合、面形状の曲率より定まる係数μを用いて、長径2aは次式となる。
【数7】
最終的に、スピンモーメントMsは、次式とおける。
【数8】
【0042】
次に、針状ころ37と各部品の接触モデルについて述べる。図9は、針状ころ37の接触モデルを説明するための模式図である。
円筒形状の一つの針状ころ37は、いずれも円筒形状のローラ軸36、ローラ35の内周面、両隣の針状ころ37と接触する。隙間が考慮され、針状ころ37自体が自由度を持つため、2軸が平行な場合の線接触、2軸が同一平面内で傾く場合の一様でない線接触、2軸がねじれの位置にある場合の点接触など、様々な接触が発生する。
こうした現象を効率的に模擬するため、線接触を離散的に扱い、複数の点接触によって近似するモデル化手法である特許文献1に記載の技術を用いる。
【0043】
図9に示すように、針状ころ37の径と同じ径のNs個の球を並べた面形状を、円筒形の慣性特性を有する1個の剛体に対して設定し、個々の球と円筒との接触を定義する。接触先の円筒は、ローラ軸36、ローラ35の内周面、隣の針状ころ37である。また、ローラ軸36のフランジおよびリテーナと、両端の球との接触も考慮し、針状ころ37の飛び出しを防ぐ。尚、1軸の軸受を構成するには、1本のローラ軸36に使われる針状ころ37の本数Nnと同数のモデルが必要となる。
次に、個々の球の接触力を定式化する。平行な2円筒間の弾性接近量δne[mm]は、両円筒の曲率と無関係であり、荷重と線接触長さに関係する。これより、鋼材の場合、球1個の接触力fn、接触部の長さl[mm]について次式となる。
【数9】
これを式(2)の形にすると、図8に示すm、Cとなる。
【0044】
次に、図10から図13を参照しながら、ローラ溝33に対するローラ軸36の相対運動を詳細に説明する。
スラスト力41による横揺れ振動が起こる実働時(加速時)のジョイントを想定すると、ハウジング31は、交差角が付いた状態の出力軸39に対し、回転と同方向にトルクを伝達する。
【0045】
図10は、入力軸38の座標系における相対運動を示す図である。図10に示すように、入力軸38の座標系で考えると、回転が反時計回りのとき、出力軸39は時計回りに振れ回ることになる。更に、出力軸39が1回振れ回る間に、ローラ軸36およびローラ35がローラ溝33内を1往復するとともに、ジョイント中心40に対して偏心した位置にあるトリポード中心が2回公転することが知られている。出力軸39から見ると、トリポード中心の軌跡は円形となり、公転方向は回転方向と同じく反時計回りである。これらの知見を基に、ローラ軸36の挙動を定式化すると以下のようになる。
尚、図10では、入力軸38の方向をZ軸、入力軸38と出力軸39の交差角が0度のときのローラ軸36の方向をY軸、Z軸とY軸に直交する方向をX軸とする。また、ローラ軸36のx軸回りの回転をピッチング、y軸回りの回転をヨーイング、z軸回りの回転をローリングとする。
【0046】
図11は、ピッチ角φを説明する図である。出力軸39の振れ回りに伴うローラ軸36のピッチ角φは、図11から分かる通り次式となる。
【数10】
ここで、θは交差角、ωは出力軸39の振れ回り角速度、tは時間である。RとLはθに関係する変数であり、出力軸39端の公転半径とz方向長である。φ、θが小さい場合、次式で近似できる。
【数11】
【0047】
図12は、ヨー角ψを説明する図である。出力軸39の振れ回りにより、ヨーイングも生じる。図12から分かる通り、ヨー角ψは次式となる。
【数12】
ピッチ角φと同様に、ψ、θが小さい場合、次式で近似できる。
【数13】
【0048】
図13は、ロール角ξとローラ軸中心の変位を説明する図である。偏心したトリポード中心が公転することにより、ローラ軸36の挙動はローリングと各方向の変位を複合したものとなる。図13は、トリポード中心とローラ軸中心の挙動を出力軸39基準で示している。荷重伝達状態におけるローラ軸中心の変位はローラ軸方向のみと仮定すると、ロール角ξは次式となる。
【数14】
ここでeはトリポード中心の偏心量、sはトリポード中心からローラ軸中心までの距離である。ξが微小角であること、及び従来からの知見より、e=s(1−cosθ)/(2cosθ)となることから、式(14)は次式で近似できる。
【数15】
次に、ローラ軸方向の変位dを次式で示す。
【数16】
ξが微小角の場合、cosξ≒1であることから、次式となる。
【数17】
【0049】
図2の説明に戻る。局所スラスト力算出手段22は、局所解析モデルから導かれる運動方程式を解くことで、一つの伝達経路のスラスト力である局所スラスト力を算出し、局所スラスト力データ25を作成する。
ローラ35からローラ溝33に作用する力を入力軸38の座標系に従って定義したとき、x軸方向の力が押付力Fx、y軸方向の力が横力Fy、z軸方向の力が局所スラスト力Fzである。
局所スラスト力算出手段22は、汎用の機構運動解析ソフトウェアの機能を用いても良いし、解析対象ごとに専用のプログラムを組んでも良い。但し、本発明は、特定のソフトウェアに限定されるものではない。
【0050】
全体スラスト力算出手段23は、局所スラスト力の位相をずらして足し合わせることで、摺動式等速ジョイント30全体のスラスト力である全体スラスト力を算出し、全体スラスト力データ26を作成する。
【0051】
数値解析装置1の制御部3は、局所解析モデル定義手段21によって、局所解析モデルデータ24を作成し、作成した局所解析モデルデータ24を記憶部5に記憶する。局所解析モデルデータ24の作成に必要なデータは、入力部11等を介して入力する。次に、制御部3は、局所解析モデルデータ24に基づいて、局所スラスト力算出手段22によって、運動方程式を解くことで、局所スラスト力データ25を作成し、作成した局所スラスト力データ25を記憶部5に記憶する。次に、制御部3は、局所スラスト力データ25に基づいて、全体スラスト力算出手段23によって、全体スラスト力データ26を作成し、作成した全体スラスト力データ26を記憶部5に記憶する。作成したデータは、表示部13等に表示するなど、所望の方法で出力可能である。
【0052】
一つの伝達経路のスラスト力である局所スラスト力の位相をずらして足し合わせることで全体スラスト力を算出できる理由は、本発明者らの研究で得られた知見によるものである。尚、これらの知見は特許文献1に記載されている為、以下では概要を説明する。
まず、全体スラスト力の波形において、1回転に3回変動する回転3次成分が顕著に現れることが分かった。また、回転3次成分はそれぞれのローラ溝33で発生することが分かった。更に、3つの溝が略等間隔に配置されることに伴い、3つのローラ溝33で発生する回転3次成分の波形の位相差は、それぞれ120度であることが分かった。これらの知見によって、一つの伝達経路のスラスト力である局所スラスト力の波形のみを算出し、算出した波形の位相を120度ずつずらして足し合わせることで、全体スラスト力を算出することができる。
【0053】
本実施形態における数値解析方法では、解析結果の精度を保ちながら、トリポード型等速ジョイント30であれば、モデルの編集作業が1/3程度に軽減される。また、計算時間も同様に1/3程度に短縮される。
【0054】
次に、図14を参照しながら、実機の試験方法について説明する。図14は、試験装置の概要を示すブロック図である。本実施の形態では、ドライブシャフト全体としての試験を行う特許文献2と異なり、トリポード型等速ジョイント30のみを対象として試験を行うものである。特に、トリポード型等速ジョイント30の一つの伝達経路を構成する部品である局所部品のみを供試体とするものである。供試体とする局所部品は、少なくとも、入力側となるハウジング31内部に入力軸38と平行に設けられるローラ溝33、ローラ溝33を摺動するローラ35、ローラ35の回転軸であるローラ軸36である。
【0055】
図14に示すように、中間軸32には一つのローラ軸36を有するトリポード34が連結される。ローラ軸36には、針状ころ(不図示)等を介してローラ35が配置される。ローラ溝33は、圧電型の3軸荷重計56に固定される。
中間軸32は、回転と摺動が可能な回転及び並進軸受51で支持される。また、中間軸32の一端には、球ジョイント53を介して負荷ジャッキ52が配置される。また、中間軸32にはアーム54が取り付けられる。アーム54には、球ジョイント53を介して加振機55が配置される。
【0056】
図14において、紙面の左右方向をX軸、紙面の前後方向をY軸、紙面の上下方向をZ軸とする。
試験方法は、まず、負荷ジャッキ52によって中間軸32に荷重を付加し、ローラ溝33にローラ35を押し付ける。次に、中間軸32に取り付けたアーム54を加振することで回転を与える。これにより、中間軸32の振れ回りが発生し、これに伴いローラ軸36のX軸回りの回転であるピッチングが発生する。そして、3軸荷重計56によって、x軸方向の力を押付力Fx、y軸方向の力を横力Fy、z軸方向の力を局所スラスト力Fzとして分離計測する。
更に、計測された局所スラスト力Fzの位相をずらして足し合わせることで、摺動式等速ジョイント30全体のスラスト力である全体スラスト力を計測する。
【0057】
スラスト力は交差角θに依存して変化するので、特許文献2などに記載の従来技術による試験方法では、試験装置によって交差角θを変えながら試験を行う必要があった。従って、従来技術による試験方法では、交差角を変えるための試験装置が必要であった。一方、本実施形態の試験方法では、図14に示す通り、交差角を変えるための試験装置が不要である。これは、式(11)を見れば分かる通り、ピッチ角φは交差角θで表されることから、ピッチングを考慮してピッチ角φを変えることによって、交差角θを変えることと同等の結果を得ることができるからである。ピッチ角φは、加振機55による加振力を変えることで、所望の値に変えることができる。従って、本試験方法では、大がかりな装置を必要とせず、容易にスラスト力の試験を行うことができる。
【実施例】
【0058】
以下では、数値解析による解析結果と実機に対する実験結果を比較しながら、本発明の実施例について説明する。
【0059】
<数値解析による解析条件>
数値解析による解析条件としては、ローラ軸36の強制変位により、所定の荷重にてローラ35をローラ溝33に押し付け、ローラ溝33に対するローラ軸36の相対運動をローラ軸36とハウジング31の間に与える。尚、実機に対する実験結果との比較が可能なピッチングのみを拘束条件とする。
【0060】
本実施例では、押付荷重の初期値を1000N、出力軸39の振れ回り角速度ωを20πrad/s(角周波数10Hz)、軸交差角θを10度とした。各部品の位置と形状については、1軸の針状ころ数Nnが46である市販ジョイントの寸法(公差中央値)を用いた。針状ころモデルの球の数Nsは7とした。摩擦係数の値として、ローラ35とローラ溝33の間のすべり摩擦は0.055、針状ころ37と各部品の間のすべり摩擦では0.050、転がり摩擦は全て0.002とした。これらはグリースを付けた試験片による実測値である。また、低い相対速度でも摩擦力を作用させるため、摩擦係数が一定となる速度νst(図6参照)を解析中の最大すべり速度の1/4となるように設定した。転がり摩擦でも同様とした。
【0061】
<数値解析による解析結果>
ローラ35からローラ溝33に作用する力を入力軸38の座標系に従って定義し、押付力Fx、横力Fy、局所スラスト力Fzとする。
図15は、押付力Fxの押付荷重初期値からの変動分ΔFxと横力Fyの解析結果を示す図である。また、図16は、局所スラスト力Fzと修正した局所スラスト力Fz’の解析結果を示す図である。図15と図16に示す結果は、両方とも解析開始から2往復目の結果である。修正した局所スラスト力Fz’は、押付荷重初期値からの変動分ΔFxの影響を排除する為、各解析出力時間においてFzをFxで除した後に押付荷重初期値を乗じて換算したものである。図16に示すように、修正によって波形の特徴に変化はないことから、以下では、Fz’を用いて解析結果を説明する。
【0062】
<実機に対する実験結果と検証>
実機に対する実験方法は、図14を参照して説明した通りである。本実施例では、数値解析と同じ条件でローラ溝33に対する作用力を測定する。
図17は、押付力Fxの押付荷重初期値からの変動分ΔFxと横力Fyの実験結果を示す図である。図15の解析結果と比較すると、ΔFxとFyの両方とも、変動する位相はほぼ一致するが、変動の幅は異なった。特に、図15の解析結果によるΔFxは、図17の実験結果の2倍となった。この理由は、実験装置の弾性変形の影響である。数値解析による局所解析モデルでは、梁要素により中間軸32の剛性を考慮しているが、実験装置を構成する負荷ジャッキ52や、各種装置を支持する鋼性ブロック(不図示)等の剛性まで模擬できていない。従って、各支持部が剛であり、変動が大きくなったと考えられる。
【0063】
図18は、修正した局所スラスト力Fz’の実験結果を示す図である。図16の解析結果と比較すると、Fz’の位相、振幅ともに良く一致しており、概形もほぼ一致した。このように、数値解析において、拘束条件として定義されるローラ溝33に対するローラ軸36の相対運動としてピッチングのみを考慮しても、十分な精度の解析結果を得ることができる。
【0064】
<数値解析による実働時の解析結果>
図19は、設定する相対運動が異なる2種類のFz’を示す図である。図19の実線は、ジョイント実働時を想定して全ての相対運動を考慮した波形である。図19の破線は、ピッチングのみを考慮した波形であり、図16のFz’に相当する。図19の実線と破線を比較すると、波形の振幅はほぼ同じであり、位相が異なる。図19から、全ての相対運動(ピッチング、ヨーイング、ローリング、ローラ軸中心の変位)の中で、ピッチングが支配的であると考えられる。
【0065】
図20は、図19の2種類の波形の次数比分析を示す図である。図20に示す通り、全ての相対運動を考慮した波形とピッチングのみを考慮した波形の両方とも、回転1次と回転3次の成分が顕著に現れた。実働時のジョイントでは、ローラ35とローラ溝33が略等間隔に3組配置されることで1/3周期ずつ位相がずれるため、回転3次成分の位相は重なり合って3倍の振幅となる。一方、回転1次成分はほぼ打ち消される。従って、スラスト力は回転3次が主成分となる。
【0066】
<ローラ35のすべり摩擦力の発生要因>
スラスト力の回転3次成分の主要因は、ローラ35とローラ溝33のすべり摩擦力である(特許文献1参照)。本実施例の数値解析においても、各接触部の摩擦係数に関するパラメータスタディにより確認したところ、実働時想定の解析結果では、回転3次成分の実効値のうち92%がローラ35のすべり摩擦力によるものであった。そこで、考慮する摩擦をローラ35とローラ溝33のすべり摩擦力のみに絞り込み、各相対運動の影響度合いを検討する。
【0067】
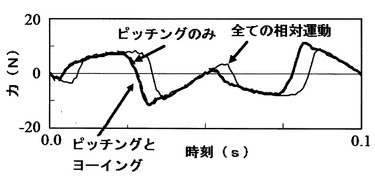
図21は、ヨーイングの影響度合いを示す図である。図21では、図19と同様、実線が全ての相対運動を考慮した波形、破線がピッチングのみを考慮した波形である。また、太線がピッチングとヨーイングを考慮した波形である。図21に示す通り、ピッチングとヨーイングを考慮した波形(太線)は、ピッチングのみの波形(破線)と位相が一致するが、全ての相対運動を考慮した波形(実線)とは位相が一致しない。
【0068】
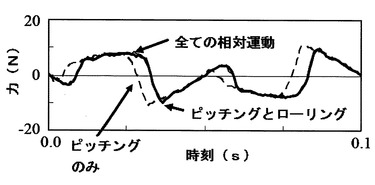
図22は、ローリングの影響度合いを示す図である。図22では、図19と同様、実線が全ての相対運動を考慮した波形、破線がピッチングのみを考慮した波形である。また、太線がピッチングとローリングを考慮した波形である。図22に示す通り、ピッチングとローリングを考慮した波形(太線)は、ピッチングのみの波形(破線)と位相が一致しないが、全ての相対運動を考慮した波形(実線)とは位相が一致する。
【0069】
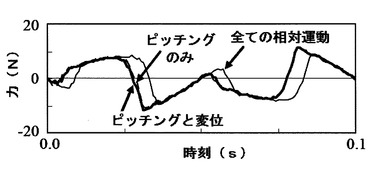
図23は、ローラ軸中心の変位の影響度合いを示す図である。図23では、図19と同様、実線が全ての相対運動を考慮した波形、破線がピッチングのみを考慮した波形である。また、太線がピッチングとローラ軸中心の変位を考慮した波形である。図23に示す通り、ピッチングとローラ軸中心の変位を考慮した波形(太線)は、ピッチングのみの波形(破線)と位相が一致するが、全ての相対運動を考慮した波形(実線)とは位相が一致しない。
【0070】
図21から図23に示す通り、ピッチングに加えてローリングを考慮することで、実働時想定の波形(全ての相対運動を考慮した波形)と位相が一致することが分かった。すなわち、数値解析では、拘束条件として定義されるローラ溝33に対するローラ軸36の相対運動として、ピッチングとローリングを考慮することで、実働時想定と同等の結果を得ることができる。
【0071】
本発明における数値解析方法、および実機による試験方法は、トリポード型等速ジョイント30の開発・設計段階において、スラスト力を解析するために有用である。また、トリポード型等速ジョイント30の耐久試験などにも用いることができる。
【0072】
以上、添付図面を参照しながら、本発明に係る数値解析装置等の好適な実施形態について説明したが、本発明はかかる例に限定されない。当業者であれば、本願で開示した技術的思想の範疇内において、各種の変更例又は修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【符号の説明】
【0073】
21………局所解析モデル定義手段
22………局所スラスト力算出手段
23………全体スラスト力算出手段
24………局所解析モデルデータ
25………局所スラスト力データ
26………全体スラスト力データ
30………トリポード型等速ジョイント
31………ハウジング
32………中間軸
33………ローラ溝
34………トリポード
35………ローラ
36………ローラ軸
37………針状ころ
38………入力軸
39………出力軸
40………ジョイント中心
41………スラスト力
51………回転及び並進軸受
52………負荷ジャッキ
53………球ジョイント
54………アーム
55………加振機
56………3軸荷重計
【特許請求の範囲】
【請求項1】
駆動力の伝達経路を複数有する摺動式等速ジョイントの数値解析を行う数値解析装置であって、
一つの伝達経路を構成する部品である局所部品と、前記局所部品間の連結と、前記局所部品同士の相対運動とを含む局所解析モデルを定義する手段と、
前記局所解析モデルから導かれる運動方程式を解くことで、一つの伝達経路のスラスト力である局所スラスト力を算出する手段と、
前記局所スラスト力の位相をずらして足し合わせることで、前記摺動式等速ジョイント全体のスラスト力である全体スラスト力を算出する手段と、
を具備することを特徴とする数値解析装置。
【請求項2】
前記局所部品として、少なくとも、入力側となるハウジング内部に入力軸と平行に設けられるローラ溝、前記ローラ溝を摺動するローラ、前記ローラの回転軸であるローラ軸が含まれ、
前記局所解析モデルは、前記局所部品が剛体として定義され、前記ローラと前記ローラ軸の連結、および前記ローラと前記ローラ溝の連結が接触と摩擦を模擬した非線形ばね要素として定義され、前記ローラ溝に対する前記ローラ軸の相対運動が拘束条件として定義されるものであることを特徴とする請求項1に記載の数値解析装置。
【請求項3】
入力軸の座標系において、入力軸の方向をZ軸、入力軸と出力軸の交差角が0度のときの前記ローラ軸の方向をY軸、Z軸とY軸に直交する方向をX軸とすると、
拘束条件として定義される前記ローラ溝に対する前記ローラ軸の相対運動は、少なくとも前記ローラ軸がX軸回りに回転する運動であることを特徴とする請求項2に記載の数値解析装置。
【請求項4】
拘束条件として定義される前記ローラ溝に対する前記ローラ軸の相対運動は、更に、前記ローラ軸がZ軸回りに回転する運動を含むことを特徴とする請求項3に記載の数値解析装置。
【請求項5】
駆動力の伝達経路を複数有する摺動式等速ジョイントの数値解析を行う数値解析方法であって、
一つの伝達経路を構成する部品である局所部品と、前記局所部品間の連結と、前記局所部品同士の相対運動とを含む局所解析モデルを定義するステップと、
前記局所解析モデルから導かれる運動方程式を解くことで、一つの伝達経路のスラスト力である局所スラスト力を算出するステップと、
前記局所スラスト力の位相をずらして足し合わせることで、前記摺動式等速ジョイント全体のスラスト力である全体スラスト力を算出するステップと、
を含むことを特徴とする数値解析方法。
【請求項6】
コンピュータを請求項1から請求項4のいずれかに記載の数値解析装置として機能させるプログラム。
【請求項7】
駆動力の伝達経路を複数有する摺動式等速ジョイントを試験する試験方法であって、
一つの伝達経路を構成する部品である局所部品として、少なくとも、入力側となるハウジング内部に入力軸と平行に設けられるローラ溝、前記ローラ溝を摺動するローラ、前記ローラの回転軸であるローラ軸を供試体とし、
前記ローラ溝に連結される中間軸を回転と摺動が可能な軸受で支持し、前記中間軸の一端に負荷ジャッキによって荷重を付加することで前記ローラ溝に前記ローラを押し付け、前記中間軸に取り付けたアームを加振することで回転を与え、前記ローラ溝を3軸荷重計に固定することで、一つの伝達経路のスラスト力である局所スラスト力を計測するステップと、
前記局所スラスト力の位相をずらして足し合わせることで、前記摺動式等速ジョイント全体のスラスト力である全体スラスト力を計測するステップと、
を含むことを特徴とする試験方法。
【請求項1】
駆動力の伝達経路を複数有する摺動式等速ジョイントの数値解析を行う数値解析装置であって、
一つの伝達経路を構成する部品である局所部品と、前記局所部品間の連結と、前記局所部品同士の相対運動とを含む局所解析モデルを定義する手段と、
前記局所解析モデルから導かれる運動方程式を解くことで、一つの伝達経路のスラスト力である局所スラスト力を算出する手段と、
前記局所スラスト力の位相をずらして足し合わせることで、前記摺動式等速ジョイント全体のスラスト力である全体スラスト力を算出する手段と、
を具備することを特徴とする数値解析装置。
【請求項2】
前記局所部品として、少なくとも、入力側となるハウジング内部に入力軸と平行に設けられるローラ溝、前記ローラ溝を摺動するローラ、前記ローラの回転軸であるローラ軸が含まれ、
前記局所解析モデルは、前記局所部品が剛体として定義され、前記ローラと前記ローラ軸の連結、および前記ローラと前記ローラ溝の連結が接触と摩擦を模擬した非線形ばね要素として定義され、前記ローラ溝に対する前記ローラ軸の相対運動が拘束条件として定義されるものであることを特徴とする請求項1に記載の数値解析装置。
【請求項3】
入力軸の座標系において、入力軸の方向をZ軸、入力軸と出力軸の交差角が0度のときの前記ローラ軸の方向をY軸、Z軸とY軸に直交する方向をX軸とすると、
拘束条件として定義される前記ローラ溝に対する前記ローラ軸の相対運動は、少なくとも前記ローラ軸がX軸回りに回転する運動であることを特徴とする請求項2に記載の数値解析装置。
【請求項4】
拘束条件として定義される前記ローラ溝に対する前記ローラ軸の相対運動は、更に、前記ローラ軸がZ軸回りに回転する運動を含むことを特徴とする請求項3に記載の数値解析装置。
【請求項5】
駆動力の伝達経路を複数有する摺動式等速ジョイントの数値解析を行う数値解析方法であって、
一つの伝達経路を構成する部品である局所部品と、前記局所部品間の連結と、前記局所部品同士の相対運動とを含む局所解析モデルを定義するステップと、
前記局所解析モデルから導かれる運動方程式を解くことで、一つの伝達経路のスラスト力である局所スラスト力を算出するステップと、
前記局所スラスト力の位相をずらして足し合わせることで、前記摺動式等速ジョイント全体のスラスト力である全体スラスト力を算出するステップと、
を含むことを特徴とする数値解析方法。
【請求項6】
コンピュータを請求項1から請求項4のいずれかに記載の数値解析装置として機能させるプログラム。
【請求項7】
駆動力の伝達経路を複数有する摺動式等速ジョイントを試験する試験方法であって、
一つの伝達経路を構成する部品である局所部品として、少なくとも、入力側となるハウジング内部に入力軸と平行に設けられるローラ溝、前記ローラ溝を摺動するローラ、前記ローラの回転軸であるローラ軸を供試体とし、
前記ローラ溝に連結される中間軸を回転と摺動が可能な軸受で支持し、前記中間軸の一端に負荷ジャッキによって荷重を付加することで前記ローラ溝に前記ローラを押し付け、前記中間軸に取り付けたアームを加振することで回転を与え、前記ローラ溝を3軸荷重計に固定することで、一つの伝達経路のスラスト力である局所スラスト力を計測するステップと、
前記局所スラスト力の位相をずらして足し合わせることで、前記摺動式等速ジョイント全体のスラスト力である全体スラスト力を計測するステップと、
を含むことを特徴とする試験方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】

【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2011−33432(P2011−33432A)
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願番号】特願2009−178701(P2009−178701)
【出願日】平成21年7月31日(2009.7.31)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【出願人】(000001247)株式会社ジェイテクト (7,053)
【Fターム(参考)】
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願日】平成21年7月31日(2009.7.31)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【出願人】(000001247)株式会社ジェイテクト (7,053)
【Fターム(参考)】
[ Back to top ]