
昇降装置および搬送システム
【課題】タクトタイムが短縮された昇降装置を提供する。
【解決手段】上下に配された第1搬送部20と第2搬送部30との間で、昇降により搬送対象物Wを受け渡す昇降装置であって、第1搬送部20との間で搬送対象物Wの受け渡しを行う第1移載エリア7と、第2搬送部30との間で搬送対象物Wの受け渡しを行い、第1移載エリア7に対して下方に設けられた第2移載エリア8と、双方の移載エリア間を往復して搬送対象物Wを昇降させる昇降台13とを備え、第1移載エリア7には、第1搬送部20から昇降台13へ、または昇降台13から第1搬送部20へと搬送対象物Wを移載する移載部41が設けられており、移載部41は、搬送対象物Wが載置された状態の昇降台13の第1移載エリア7への侵入時および第1移載エリア7からの退出時には、昇降台13の昇降により搬送対象物Wが搬送される際に通過する通過領域Pの外側へと退避自在に設けられている。
【解決手段】上下に配された第1搬送部20と第2搬送部30との間で、昇降により搬送対象物Wを受け渡す昇降装置であって、第1搬送部20との間で搬送対象物Wの受け渡しを行う第1移載エリア7と、第2搬送部30との間で搬送対象物Wの受け渡しを行い、第1移載エリア7に対して下方に設けられた第2移載エリア8と、双方の移載エリア間を往復して搬送対象物Wを昇降させる昇降台13とを備え、第1移載エリア7には、第1搬送部20から昇降台13へ、または昇降台13から第1搬送部20へと搬送対象物Wを移載する移載部41が設けられており、移載部41は、搬送対象物Wが載置された状態の昇降台13の第1移載エリア7への侵入時および第1移載エリア7からの退出時には、昇降台13の昇降により搬送対象物Wが搬送される際に通過する通過領域Pの外側へと退避自在に設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、昇降装置および昇降装置を備えた搬送システムに関し、特に、タクトタイムを短縮する技術に関する。
【背景技術】
【0002】
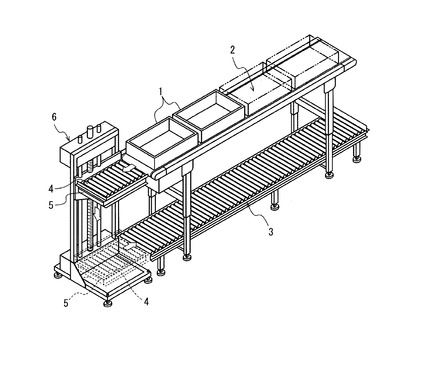
工場の生産ラインなどでは、ベルトコンベアやローラコンベアを利用して、製造された製品をコンテナ等に収容して搬出する装置が多く用いられている。このとき、製品が収容されたコンテナ(搬送対象物、ワーク)を搬出するラインと共に、次の製品を収容するための空のコンテナを搬入するラインが必要であるが、例えば、図9に示す特許文献1の搬送システムのように、空のコンテナ1を搬入するベルトコンベア装置2と製品が収容されたコンテナ1を搬出するローラコンベア装置3を鉛直方向に配置して上下2段とし、その間を可動床4を備えたリフター5を昇降させるコンテナ昇降装置6で連絡する構成を備えた搬送システムが、従来から用いられている。このような構成を備えた搬送システムの場合、リフターによって1つのコンテナが搬送された後、リフターが元の位置に戻ってくるまで次のコンテナは待っていなくてはならず、1つコンテナを搬送するのに少なくともリフターが一往復する時間を要する。そのため、タクトタイムの短縮には昇降装置における作業効率の向上が重要である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3216086号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、昇降装置における作業効率を上げるためにリフターの昇降速度を速くすると、リフターの停止制御が難しくなり、停止する際の衝撃が大きくなったり、ワークの載置安定性が損なわれて落下等の危険性が増したりする恐れがある。そのため、昇降速度の単純な高速化による作業効率の向上には限界がある。
そこで、本発明は、昇降速度を高速化することなく、昇降装置におけるタクトタイムが短縮された昇降装置および搬送システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明に係る昇降装置は、上下に配された第1搬送部と第2搬送部との間で、昇降により搬送対象物を受け渡す昇降装置であって、前記第1搬送部との間で前記搬送対象物の受け渡しを行う第1移載エリアと、前記第2搬送部との間で前記搬送対象物の受け渡しを行い、前記第1移載エリアに対して下方に設けられた第2移載エリアと、前記第1移載エリアと前記第2移載エリアとの間を往復して、当該間で前記搬送対象物を昇降させる昇降台と、を備え、前記第1移載エリアには、前記第1搬送部から前記搬送対象物を受け取り前記昇降台へと移載するか、または前記昇降台から前記搬送対象物を受け取り前記第1搬送部へと移載する移載部が設けられており、前記移載部は、前記搬送対象物が載置された状態の前記昇降台の前記第1移載エリアへの侵入時および前記第1移載エリアからの退出時には、前記昇降台の昇降により前記搬送対象物が搬送される際に通過する通過領域の外側へと退避自在に設けられていることを特徴とする。
【0006】
また、本発明に係る搬送システムは、上記昇降装置を備えることを特徴とする。
【発明の効果】
【0007】
本発明に係る昇降装置の構成によれば、搬送対象物が載置された状態の昇降台の第1移載エリアへの侵入および第1移載エリアからの退出が完了すると、移載部は、退避を解除して元の位置に戻り、第1搬送部との間で搬送対象物の受け渡し作業を行うことが可能である。従って、搬送対象物が載置された状態の昇降台が第1移載エリアへと侵入する場合、即ち、昇降台が第2移載エリアから第1移載エリアへと搬送対象物を搬送する場合には、移載部は昇降台から搬送対象物を受け取って第1搬送部へと渡す作業を行うことができ、移載部が上記作業を行っている間に、昇降台は、第2移載エリアへと降下して、次の搬送対象物を第2移載エリアから第1移載エリアへと搬送する作業を開始することができる。また、搬送対象物が載置された状態の昇降台が第1移載エリアから退出する場合、即ち、昇降台が第1移載エリアから第2移載エリアへと搬送対象物を搬送する場合には、搬送対象物が載置された昇降台が第1移載エリアから退出して第2移載エリアへと搬送対象物を搬送し、搬送対象物を第2搬送部に渡した後、次の搬送対象物を搬送するために再び第1移載エリアへと戻って来る間に、移載部は、次の搬送対象物を第1搬送部から受け取り、第1移載エリアにおいて昇降台へと搬送対象物を移載する準備を整えることができる。即ち、移載部による移載作業と昇降台による昇降搬送作業を同時に並行して行う構成とすることができ、これによりタクトタイムを短縮することができる。
【図面の簡単な説明】
【0008】
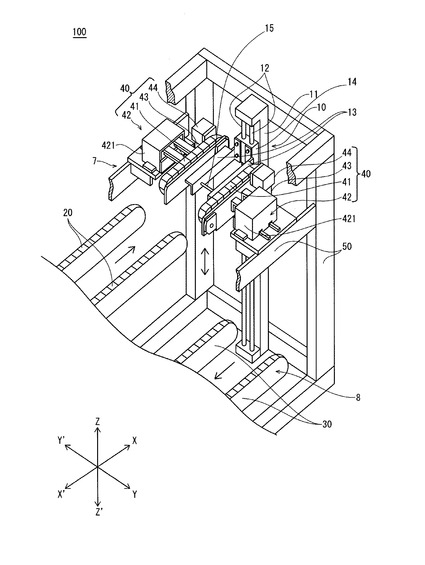
【図1】本発明の実施形態に係る昇降装置および当該昇降装置を備えた搬送システムの概略構成を示す一部破断外観斜視図である。
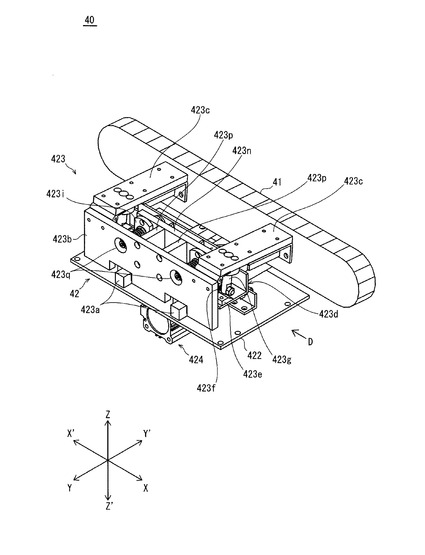
【図2】移載ユニットの概略構成を示す外観斜視図である。
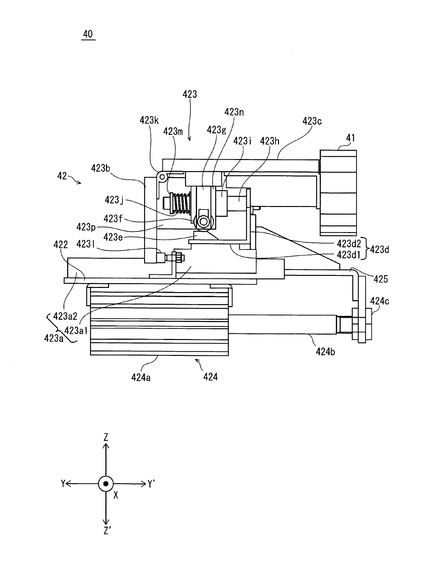
【図3】図2の矢印Dから見た移載ユニットの側面図である。
【図4】移載ユニットの動作を模式的に示す図であって、(a)は、ピストンが伸びている状態を示す側面図であり、(b)は、ピストンが収縮する移載部が下降した状態を示す図であり、(c)は、退避プロセス完了時の移載ユニットの状態を示す図である。
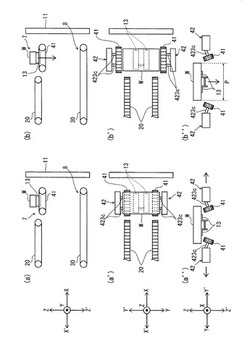
【図5】本発明の実施形態に係る昇降装置の降下搬送プロセスの一部を模式的に示す図である。(a)は、昇降装置にワークが搬入される前の状態における搬送システムの正面図であり、(a’)は、平面図であり、(a’’)は、ワークの搬入方向から見た側面図である。(b)は、昇降装置の移載部にワークが搬入された直後の状態における搬送システムの正面図であり、(b’)は、平面図であり、(b’’)は、ワークの搬入方向から見た側面図である。
【図6】図5の続きを示す図である。(a)は、移載部から昇降台にワークが移載された状態における搬送システムの正面図であり、(a’)は、平面図であり、(a’’)は、ワークの搬入方向から見た側面図である。(b)は、昇降台が降下開始する直前の状態における搬送システムの正面図であり、(b’)は、平面図であり、(b’’)は、ワークの搬入方向から見た側面図である。
【図7】変形例1に係る昇降装置の移載部の退避プロセスを模式的に示す図であって、(a)は、退避プロセス開始前の移載部および昇降台の状態を示す側面図であり、(b)は、退避プロセス完了時の移載部および昇降台の状態を示す側面図である。
【図8】変形例2に係る昇降装置の移載部の退避プロセスを模式的に示す図である。(a)は、退避プロセス開始前の移載部および昇降台の状態を示す平面図であり、(a’)は、そのワークの搬入方向から見た側面図である。(b)は、移載部が下降した状態を示す平面図であり、(b’)は、そのワークの搬入方向から見た側面図である。(c)は、退避プロセス完了時の状態を示す平面図であり、(c’)は、そのワークの搬入方向から見た側面図である。
【図9】特許文献1に示された従来の昇降装置および搬送システムを示す外観斜視図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態に係る昇降装置および搬送システムについて、図面を参照しながら説明する。
<実施形態>
[搬送システムの概略構成]
図1は、本発明の実施形態に係る昇降装置および搬送システムの構成を示す一部破断外観斜視図である。図1に示すように、本実施形態に係る昇降装置10を備える搬送システム100は、鉛直方向(Z軸方向)の上下に配されたベルトコンベア20(第1搬送部)およびベルトコンベア30(第2搬送部)を有し、ベルトコンベア20と30との間を昇降装置10が連絡している。ベルトコンベア20および30は、不図示の駆動源により回転駆動される。昇降装置10は、ベルトコンベア20および30のX方向(ベルトコンベア20の搬送方向)における端部間を連絡するように配設されており、鉛直方向に長尺なフレーム11上に直立した昇降軸12に沿って昇降する昇降台13を備える。昇降台13は、L字形の断面形状を有する長尺な部材が一対互いに所定の間隔を空けて平行に並べられて構成されている。昇降台13の前記長尺な部材の一端は、昇降軸12に沿って昇降する昇降ベース14に固定されており、昇降ベース14が昇降軸12に沿って昇降することにより、昇降台13が昇降される。以下、昇降ベース14の昇降により昇降台13が昇降されることを、簡略化して、単に昇降台13が昇降すると表現する。昇降台13の長尺な部材同士は、昇降台13の形状維持のために上記所定の間隔と同じ長さの補強部材15により連結され補強されている。
【0010】
なお、図1においては図示を省略したが、昇降台13の上昇限位置と下降限位置のフレーム側面には、停止用センサおよびスローダウン用センサが配設されており、フレーム11上部にはワーク確認用センサが配設されている。昇降手段としては、エアシリンダやチェーン等が用いられる。また、図1では、昇降台13が上昇限位置にある状態を示している。
【0011】
ベルトコンベア20のX方向側であって、上昇限位置にある昇降台13の両脇(Y方向およびY’方向)には、一対の移載ユニット40がそれぞれひとつずつ配設されている。移載ユニット40は、移載部41、移動部42、モータ43、ギアボックス44等を備える。移載部41は、ベルトコンベアから成り、ベルトコンベア20および昇降台13との間で、直接ワークの受け渡しを行う。移動部42は、詳しくは後述するが、移載部41を垂直方向および水平方向に移動させる。モータ43は、移載部41を回転駆動させる駆動源であり、モータ43の回転駆動力がギアボックス44内の一連のギア(不図示)を介して移載部41に伝達される。
【0012】
本実施形態においては、ベルトコンベア20は、上段に配されたワーク(搬送対象物)供給用のベルトコンベアであり、一対のベルトコンベアが互いに所定の間隔(ここでは、一対の移載部41間の間隔と略同じ)を空けて平行に配設されている。また、ベルトコンベア30は、下段に配されたワーク搬出用のベルトコンベアであり、ベルトコンベア20と同様に一対のベルトコンベアが互いに所定の間隔を空けて平行に配設されて成り、昇降台13が下降限位置にあるとき、双方のベルトコンベアのX方向端部間に昇降台13が位置するように配置されている。
【0013】
ベルトコンベア20によりX方向に搬送され、第1移載エリア7へと搬入されたワークは、第1移載エリア7においてベルトコンベア20のX方向端部から移載部41へと移載され、さらに移載部41から昇降台13へと移載される。そして昇降台13が第1移載エリアから下段の第2移載エリア8へと降下することによりワークは第2移載エリア8へと搬送され、第2移載エリア8において昇降台13からベルトコンベア30へと移載された後、ベルトコンベア30により搬出される。
【0014】
本実施形態においては、上段に配されたワーク供給用のベルトコンベア20から供給されたワークを、昇降装置10により下降させて下段に配されたワーク搬出用のベルトコンベア30へと受け渡す場合(以下、「降下搬送プロセス」という。)について主に説明するが、これに限定されるものではない。下段のベルトコンベア30から上段のベルトコンベア20へとワークを搬送する場合(以下、「上昇搬送プロセス」という。)については、後から述べる。
【0015】
[移載部の構成]
図2は、移載ユニット40の外観斜視図であり、図3は、図2の矢印D方向から見た側面図である。なお、図2,図3においては、一対の移載ユニット40のうち、Y方向側に配された移載ユニット40について図示しており、移載ユニット40の内部構造を示すために、カバー421(図1参照)を取り除いた状態で示している。また、モータ43およびギアボックス44(図1参照)については、図示を省略している。
【0016】
移載ユニット40は、上述のように、移載部41、移動部42、モータ43、およびギアボックス44から成る。移動部42は、基板422と、基板422の上側(Z方向)に設けられた垂直移動ユニット423と、基板422の下側(Z’方向)に設けられた水平移動ユニット424と、垂直移動ユニット423と水平移動ユニット424とを連結する連結部材425と、を備える。
【0017】
[垂直移動ユニット]
垂直移動ユニット423は、一対のリニアガイド423a、外板423b、一対のアーム423c、一対の内部フレーム423d、一対のカム423e、一対のカムフォロア423f、一対のカムフォロア支持部材423g、一対のリニアシャフト423h、一対のリニアブシュ423i、一対の圧縮コイルばね423j、一対の蝶番423k、一対のストッパ423l、一対のばねストッパ423m、内板423n、一対の連結板423p等を備える。
【0018】
リニアガイド423aは、リニアブロック423a1およびリニアレール423a2から成り、リニアブロック423a1は、基板422上にY軸方向に固設されたリニアレール423a2に沿って移動自在に設けられている。リニアブロック423a1には、X軸と直交する平面による断面がL字形の形状を有する内部フレーム423dが固定されており、内部フレーム423dのL字の底辺にあたる底板部分423d1には、X軸と直交する平面による断面形状が台形のカム423eが設けられている。
【0019】
内板423nには、貫通孔(不図示)が形成されている。当該貫通孔には、リニアブシュ423iが挿通された状態で固定されている。リニアブシュ423iにはリニアシャフト423hが軸方向に移動可能に挿通されており、リニアシャフト423hの一端は、内部フレーム423dのL字の縦の辺にあたる縦板部分423d2に固定されている。リニアシャフト423hの他端には、圧縮コイルばね423jが巻着されている。圧縮コイルばね423jのY側端部は、ばねストッパ423mにより係止されており、Y’側端部は、リニアブシュ423iにより係止されている。内板423nと外板423bとは、一対の連結板423pにより連結され、互いに固定されている。
【0020】
アーム423cの一端には移載部41が固定されており、他端は蝶番423kを介して外板423bに連結されている。これにより、移載部41は、外板423bに対して蝶番423kを中心に(X軸を中心に)回動可能となっている。また、アーム423cにはカムフォロア支持部材423gの一端が取着されており、カムフォロア支持部材423gの他端には、ローラから成るカムフォロア423fが回転可能に設けられ、カムフォロア423fは、カム423eの上面に接触している。
【0021】
[水平移動ユニット]
図2および図3に示すように、水平移動ユニット424は、シリンダチューブ424aやピストンロッド424bから成るエアシリンダであり、基板422の下面において、一対のリニアガイド423aの間に相当する位置に、Y側にシリンダチューブ424aが、Y’側にピストンロッド424bの外部に露出している方の端部424cが位置するように、Y軸に平行な方向に沿って配設されている。ピストンロッド424bの端部424cには、連結部材425が固定されており、連結部材425は、内部フレーム423dの縦板部分423d2に固定されている。これにより、ピストンロッド424bのY軸に平行な方向の運動が連結部材425を介して内部フレーム423dに伝達され、内部フレーム423dは、リニアブロック423a1と一体的にリニアガイド423aに沿って移動する。
【0022】
[移載ユニットの動作]
次に、水平移動ユニット424および垂直移動ユニット423が連動してどのように動作するのかについて説明する。
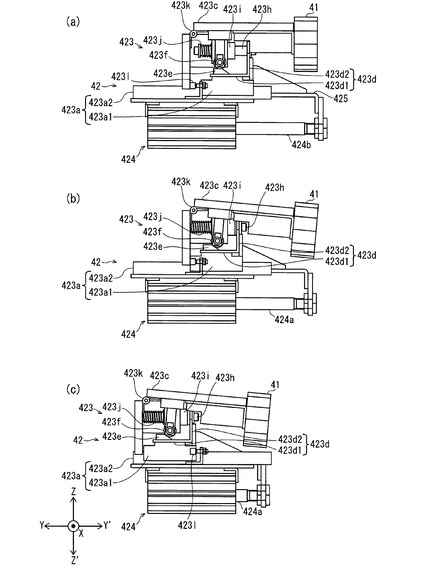
図4は、移載ユニット40の動作を示す図である。図4(a)は、ピストンロッド424bが最も伸びている状態(以下、これを「第1状態」という。)における移載ユニット40を示す側面図である。図4(b)は、ピストンロッド424bが縮む途中の状態(以下、これを「第2状態」という。)における移載ユニット40を示す側面図である。図4(c)は、ピストンロッド424bが最も縮んでいる状態(以下、これを「第3状態」という。)における移載ユニット40を示す側面図である。
【0023】
第1状態においては、カムフォロア423fはカム423eの上面上に位置しており、アーム423cは移載部41を略水平に支持している。このとき、圧縮コイルばね423jは、圧縮された状態である。
第2状態においては、ピストンロッド424bがY方向に収縮するにつれて連結部材425がリニアブロック423a1をY方向に移動させ、内部フレーム423dおよびカム423eがY方向に移動される。このとき、内部フレーム423dのY方向への移動と共にリニアシャフト423hもY方向へと移動されるが、リニアシャフト423hの移動の分だけ圧縮コイルばね423jは圧縮が解放される方向に伸びるため、リニアブシュ423iはY方向には移動せずに留まる。従って、リニアブシュ423iが固定されている内板423n、および連結板423p、外板423b、アーム423c、移載部41、カムフォロア支持部材423g、カムフォロア423fもY方向には移動しない。すると、カム423eはY方向に移動するが、カムフォロア423fはY方向に移動しないため、カムフォロア423fは相対的にカム423eの上面から斜面へとずり落ちるように移動し、カム423eの斜面に対して当接するようになる。これにより、アーム423cは蝶番423kを中心に垂直下方(Z’方向)に回動し、移載部41を第1状態よりも低い位置において支持する。なお、第1状態から第2状態に移行する際に、移載部41が下降する距離は、具体的には、例えば、10〜15〔mm〕程度である。
【0024】
そして、ピストンロッド424bがY方向にさらに収縮すると、リニアブロック423a1がさらにY方向へと移動する。これに伴い、縦板部分423d2がリニアブシュ423iと当接し、リニアブシュ423iを介して内板423nをY方向へと移動させる。これにより、外板423b、連結板423p、アーム423c、移載部41、カムフォロア支持部材423g、カムフォロア423f等が、リニアブロック423a1のY方向への移動と共にY方向に移動され、第3状態へと至る。なお、このとき、リニアシャフト423hのY方向側端部が外板423bと衝突しないように、外板423bには逃がし穴423qが設けられている。
【0025】
第3状態から第1状態へと戻る際には、上述とは逆のプロセスを経て元に戻る。第3状態から第2状態へと移行する際には、内部フレーム423dと共にリニアシャフト423hがY’方向に移動されると、圧縮コイルばね423jの弾性力により押されてリニアブシュ423iがY’方向に移動される。これに伴って内板423n、連結板423p、外板423b、アーム423c、移載部41、カムフォロア支持部材423g、カムフォロア423f等がY’方向に移動され、外板423bがストッパ423lと当接する。第2状態から第1状態へと移行する際には、外板423bがストッパ423lにより係止されているので、外板423b、内板423n、連結板423p、アーム423c、移載部41、カムフォロア支持部材423g、カムフォロア423f等はそれ以上Y’方向へと移動できないが、リニアブロック423a1、内部フレーム423d、カム423e、およびリニアシャフト423hはさらにY’方向へと移動される。このとき、リニアシャフト423hのY’方向への移動に伴い、圧縮コイルばね423jは圧縮される。また、カムフォロア423fは移動しないが、カム423eはY’方向へと移動するため、カムフォロア423fは、相対的にカム423eの斜面から上面へと乗り上げるように移動し、その結果、アーム423cが蝶番423kを中心に垂直上方(Z方向)に回動して移載部41を略水平に支持する状態となる。
【0026】
[移載部の退避プロセス]
続いて、ベルトコンベア20とベルトコンベア30との間でワークを受け渡すプロセスについて、図5および図6を参照して以下に説明する。なお、以下の説明においては、降下搬送プロセスについて先ず説明する。
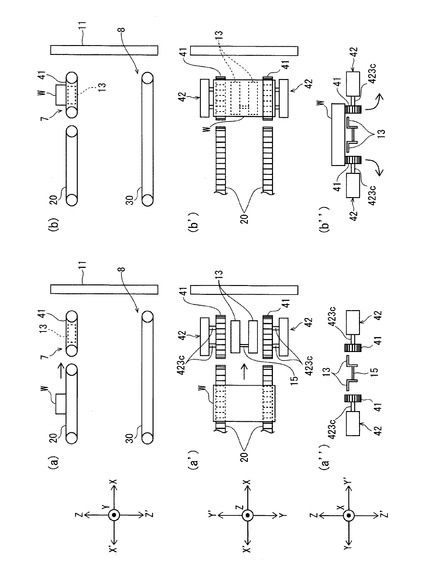
図5および図6は、本実施形態における降下搬送プロセスを模式的に示す図である。図5(a)は、第1移載エリア7にワークWが搬入される前の状態を示す正面図であって、図5(a’)は、それを真上から見た平面図であり、図5(a’’)は、そのときの第1移載エリア7の様子をX方向側から見た側面図である。ワークWが第1移載エリア7に搬入される前の状態においては、移載ユニット40は第1状態であり、昇降台13は、一対の移載部41に挟まれる形でその間に位置し、昇降台13の最上面(ワークWが載置される載置面)は、移載部41の最上部よりも鉛直方向において若干低い位置に保持されている。
【0027】
図5(b)は、ベルトコンベア20から移載部41へとワークWが移載された状態を示す正面図であり、図5(b’)は、それを真上から(Z方向側から)見た平面図であり、図5(b’’)は、そのときの第1移載エリア7の様子をX方向側から見た側面図である。ワークWが移載部41へと受け渡された状態においては、ワークWは、上昇限位置にある昇降台13の載置面よりも若干高い位置に移載部41により支持されており、昇降台13にはまだ載置されていない。
【0028】
図5各図に示す移載部41の位置において、移載部41は、ベルトコンベア20との間でワークWの受け渡しを行う。この移載部41の位置を第1位置とする。
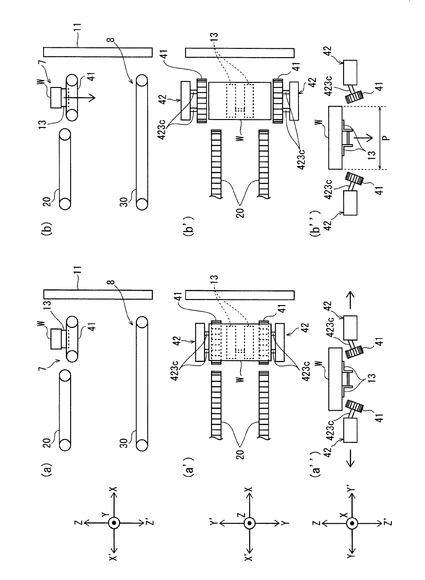
図6(a)は、ワークWが移載部41から昇降台13へと受け渡されたときの状態を示す正面図であって、図6(a’)は、それを真上から(Z方向側から)見た平面図であり、図6(a’’)は、そのときの第1移載エリア7の様子をX方向側から見た側面図である。このとき、移載ユニット40は第1状態から第2状態へと移行しており、アーム423cがZ’方向に回動して移載部41がZ’方向に移動される。これにより、移載部41の最上部は昇降台13の載置面よりも低い位置まで移動され、ワークWが昇降台13の載置面上に載置される。
【0029】
図6(b)は、昇降台13が第1移載エリア7から第2移載エリア8へと移動開始する直前の状態を示す正面図であり、図6(b’)は、それを真上から見た平面図であり、図6(b’’)は、そのときの第1移載エリア7の様子をX方向側から見た側面図である。このとき、移載ユニット40は第2態から第3態へと移行しており、移載部41は、図6(b)において破線で示すワークWの通過領域PのY軸方向における外側にまで退避した状態となっている。従って、昇降台13が下降する際に、ワークWと移載部41とがぶつかることがない。このときの移載部41の位置を第2位置とする。
【0030】
ここで、ベルトコンベア30のX方向側端部は、フレーム11に近接する位置まで延設されており、また、ベルトコンベア30のX方向側端部は、下降限位置にあるときの昇降台13よりも外側であってワークWの通過領域Pの内側に相当する位置に配設されている。さらに、第2移載エリア8において、昇降台13が下降限位置にあるとき、昇降台13は、一対のベルトコンベア30の間の位置であって、ベルトコンベア30の最上部よりも若干低い位置にある。これにより、昇降台13が下降して第2移載エリア8へとワークWを搬送する際に、昇降台13が下降限位置まで下降すると、ワークWが昇降台13からベルトコンベア30へと移載される。そして、ベルトコンベア30によりワークWが第2移載エリアの外に搬出されると、昇降台13は第1移載エリア7へと上昇して戻って来る。そして、昇降台13が下降して第2移載エリア8へとワークWを搬送し、ベルトコンベア30へとワークを受け渡して第1移載エリア7へと戻って来る間に、移載ユニット40は、第3状態から第2状態を経て第1状態へと移行し、次のワークWを受け入れる準備が整った状態となる。
【0031】
このとき、本実施形態の構成によると、昇降台13が第1移載エリア7まで戻って来るのを待たずに、次のワークWをベルトコンベア20から移載部41へと移載することができる。即ち、移載部41に次のワークWが移載完了された状態であっても、昇降台13が第1移載エリア7に戻って来るときに、昇降台13は一対の移載部41に支持されたワークWの下側から移載部41の間の位置に戻って来るため、また、昇降台13の上昇限位置は、移載部41に支持された状態のワークWの最下部よりも低い位置にあるため、昇降台13は移載部41にもワークWにも接触することなく上昇限位置まで戻って来ることができる。
【0032】
以上説明したように、本実施形態の構成によると、昇降台13がワークWを第1移載エリア7から第2移載エリア8へと搬送し、第2移載エリア8においてワークWをベルトコンベア30へと受け渡して再び第1移載エリア7へと戻って来るのを待たずして、次のワークWを第1移載エリア7の移載部41へと運び込むことができるため、昇降台13が第1移載エリアへと戻ってきたときには、すぐに次のワークWを第2移載エリア8へと搬送することができ、これにより、タクトタイムの短縮を図ることができる。
【0033】
また、移載部41がワークWの通過領域Pの外側に退避する際に、第1状態から第2状態へと移行して昇降台13の載置面、即ちワークWの下面よりも低い位置まで下がった後、第3状態へと移行して通過領域Pの外側へと退避するため、退避する際にワークWの下面を摺擦することがないため、移載部41およびワークWが受けるダメージを抑制することができるとともに、移載部41に引きずられてワークWがバランスを崩し落下する等の虞を減じることができる。
【0034】
さらに、移載部41がベルトコンベアから成り、ベルトコンベア30が下降限位置における昇降台13の両脇まで延設されていることにより、昇降台13が可動床を備える必要がないため、昇降中のワークの安定性が増し、途中で落下する危険性を減ずることができる。
加えて、第1移載エリア7においても第2移載エリア8においても昇降台13とベルトコンベア20および30との間のワークWの受け渡しにプッシャー等を用いなくてもよいため、プッシャーによるワークの損傷を減じることができる。
【0035】
また、移載部41の垂直移動および水平移動を、ひとつのエアシリンダ(水平移動ユニット424)で行うことができるため、複数の駆動源を備える必要がなく、コスト抑制および省スペース化に資することができる。
上記説明においては、上段の第1移載エリア7から下段の第2移載エリア8へとワークを搬送する降下搬送プロセスについて述べたが、第2移載エリア8から第1移載エリア7へとワークを搬送する場合においても、上記と同様の効果が期待できる。
【0036】
この場合、昇降台13が第2移載エリア8から第1移載エリア7へとワークを搬送するために上昇している間、移載ユニット40は第3状態にあり、移載部41は移動部42により第2位置に移動されている。従って、ワークWは、昇降台13の上昇により搬送される際に、移載部41と衝突することなく、第1移載エリア7へと移動することができる。そして、ワークWが第1移載エリア7に移動されたら、即ち、昇降台13が上昇限位置に到達すると、移動部42は移載部41を第1位置へと移動させ、移載部41により、ワークWが昇降台13からピックアップされる。そして、モータ43を駆動して移載部41を駆動させ、ワークWを移載部41からベルトコンベア20へと移載する。このとき、ワークWの移載部41からベルトコンベア20への移載完了を待たずに、昇降台13は第2移載エリア8へと降下して次のワークWをピックアップすることができるため、タクトタイムを短縮することができる。
【0037】
なお、昇降台13が第2移載エリア8において次のワークWをピックアップして、第1移載エリア7へと移動開始するまでの間に、移載部41はワークWをベルトコンベア20へと移載完了させ、移動部42によって再び第2位置へと移動されている。
<変形例>
以上、本発明の構成を実施形態に基づいて説明したが、本発明は上記実施形態に限られず、以下のような変形例を実施することができる。なお、説明の重複を避けるため、上記実施形態と同じ構成要素については、同符号を付して、その説明を省略する。
【0038】
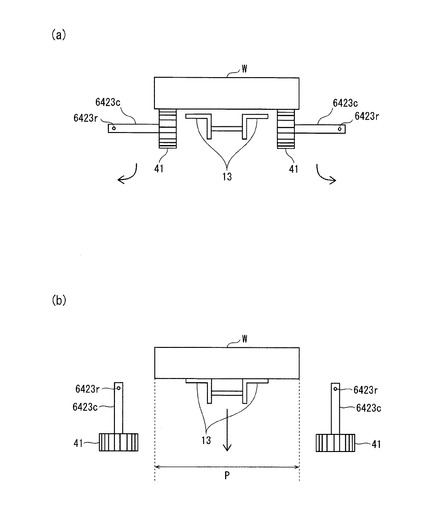
(1)図7は、変形例1に係る昇降装置の移載ユニットにおける移載部41の退避プロセスを説明する図であって、第1移載エリア7の様子をX方向側から見た側面図である。図7(a)は、ワークWがベルトコンベア20から移載部41に移載された直後の状態を示す図であり、実施形態における図5(b’’)に相当する状態を示す。図7(b)は、移載部41がワークWの通過領域Pの外側に退避した状態を示す図であり、図6(b’’)に相当する状態を示す。図7(a),(b)に示すように、アーム6423cを支点6423rを中心に略90度回動させることによっても、ワークWを移載部41から昇降台13へと移載させた後、移載部41をワークWの通過領域Pの外側へと退避させることができる。なお、本変形例においては、図7(a)の移載部41の位置が第1位置であり、図7(b)の移載部41の位置が第2位置である。また、アーム6423cの長さおよび支点6423rの位置は、Z’方向に90度回動した時に、移載部41が通過領域Pの外側に位置するような長さおよび位置に設定されている。アーム6423cを回動させる駆動源としては、実施形態のようにエアシリンダを用いてもよいし、モータ等を用いてもよい。
【0039】
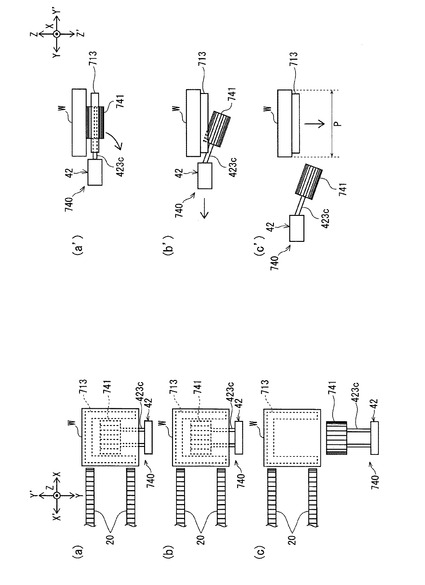
(2)上記実施形態および変形例1においては、一対の移載ユニット40が上昇限位置における昇降台13の両脇に配置されている場合について説明したが、これに限定されるものではない。例えば、移載ユニットを1つのみ備える構成であってもよい。
図8は、本変形例の昇降装置の移載ユニット740における移載部41の退避プロセスを説明する図である。図8(a)は、ワークWがベルトコンベア20から移載部741へと移載されたときの第1移載エリア7の様子を真上から(Z方向側から)見た平面図であり、図8(a’)は、それをX方向側から見た側面図である。図8(a),(a’)に示すように、1つの移載部41が、ワークWの重心である中央部近傍を支持するように、一対のベルトコンベア20の間に相当する位置の搬送方向X側に配設されている。なお、本変形例においても、移載部741は、ベルトコンベアから成るが、1つの移載部741でワークWを支持するため、上記実施形態および変形例1における移載部41よりも幅広のベルトコンベアを採用すると、ワークWの安定性がよい。昇降台713は、平面視した場合の形状がコの字状であり、このとき、コの字の内部に移載部741が位置し、コの字の開口部分にアーム423cが位置するように配置されている。また、このときの昇降台713の最上部(ワークWが載置される載置面)は、移載部741の最上部よりも若干低い位置にあり、ワークWと昇降台713とは接触していない。
【0040】
図8(b)は、ワークWが移載部741から昇降台713へと受け渡されたときの第1移載エリア7の様子を真上から(Z方向側から)見た平面図であり、図8(b’)は、それをX方向側から見た側面図である。このとき、アーム423cは、鉛直下方(Z’方向)に下がるように回動され、これにより、ワークWが昇降台713の載置面上に載置される。なお、昇降台713がコの字形状をしており、コの字の開口部分にアーム423cが位置しているため、アーム423cが回動する際に、昇降台713とぶつかることがない。
【0041】
図8(c)は、昇降台713が第1移載エリア7から第2移載エリア8へと移動開始する直前の状態の第1移載エリア7の様子を真上から(Z方向側から)見た平面図であり、図8(c’)は、それをX方向側から見た側面図である。本変形例の構成によっても、実施の形態と同様にして、移載部741を移動部42によりワークWが搬送される際に通過する通過領域P(図8(c’)において、破線で示す。)のY軸方向における外側にまで退避させることができる。
【0042】
なお、変形例2における移載ユニット740を1つのみ備える構成において、変形例1と同様に、アーム423cを略90度回動させて通過領域の外側まで移載部741を退避させる構成としてもよい。この場合においても、アーム423cがコの字形状の昇降台713の開口部分に配されているため、回動の際に昇降台713とぶつかる虞がない。
また、変形例2においては、移載ユニット740は1つのみ備えられており、移載ユニット740の退避方向は1方向のみでよいため、昇降装置10のフレーム11および昇降軸12の設置位置は、昇降台713よりもベルトコンベア20の搬送方向側(X方向側)に限られず、昇降台713を挟んで移動部42の反対側(Y’方向側)に設置されてもよい。さらには、昇降装置10のフレーム11および昇降軸12の設置位置が昇降台713のY’方向側である場合には、移動部42を昇降台713のX方向側に設けてもよい。
【0043】
なお、上記説明においては、変形例2に係る昇降台713の平面視形状がコの字状であるとしたが、これに限定されるものではない。例えば、昇降台713は、間に移載部741を挟んでその両脇に長尺な部材がアーム423cと平行な方向(図8においては、Y軸に平行な方向)に配列された形状であってもよい。
(3)上記実施形態および各変形例においては、ベルトコンベア20は、一対のベルトコンベアが平行に配設されて構成されていたが、これに限定されるものではない。例えば、一本のベルトコンベアから成ってもよい。この場合、一対のベルトコンベアにより構成されている場合よりも幅広のベルトコンベアを用いると、ワーク搬送の安定性が向上する。
【0044】
(4)上記実施形態および変形例1においては、昇降台13は、断面形状がL字形で長尺な形状を有する部材が一対互いに所定の間隔を空けて平行に並べられた状態で連結された構成であったが、これに限定されるものではない。例えば、昇降台13は、第1移載エリア7にあるときに、一対の移載部41間に収まる形状であれば、平板な板状部材から成ってもよいし、ブロック状の形状を有していてもよい。なお、実施形態および変形例1における昇降台13のように隙間を有する構成であれば、ワークを搬送していないときの昇降の際に受ける空気抵抗を小さくすることができる。
【0045】
(5)上記実施形態および各変形例においては、ベルトコンベア20,30および、移載部41は、ベルトコンベアから成っていたが、これに限定されるものではない。例えば、ローラコンベアやその他の搬送装置から成ってもよい。ワークを移載するための駆動力を備えない搬送装置を用いる場合には、プッシャー等を併用してもよい。
(6)上記実施形態および各変形例においては、移動部42の構成は、垂直移動ユニット423が基板422の上側に、水平移動ユニット424が基板422の下側に配設されていたが、これに限られない。例えば、基板422の下側に垂直移動ユニット423が、上側に水平移動ユニット424が配設される構成であってもよい。
【0046】
なお、上記実施形態に係る昇降装置および搬送システムの部分的な構成、および各変形例に係る構成を、適宜組み合わせてなる昇降装置および搬送システムであっても良い。また、上記実施形態および各変形例における説明に記載した数値は好ましいものを例示しているだけであり、それに限定されることはない。また、各図面における各部材の寸法および比は、一例として挙げたものであり、必ずしも実在の昇降装置および搬送システムの寸法および比と一致するとは限らない。さらに、本発明の技術的思想の範囲を逸脱しない範囲で、昇降装置および搬送システムの構成に適宜変更を加えることは可能である。
【産業上の利用可能性】
【0047】
本発明は、昇降装置および搬送システムのタクトタイムを短縮する技術として利用可能である。
【符号の説明】
【0048】
1 コンテナ
2 ベルトコンベア装置
3 ローラコンベア装置
4 可動床
5 リフター
6 コンテナ昇降装置
7 第1移載エリア
8 第2移載エリア
10 昇降装置
11,50 フレーム
13 昇降台
20,30 ベルトコンベア
40 移載ユニット
41 移載部
42 移動部
422 基板
423 垂直移動ユニット
423a リニアガイド
423a1 リニアブロック
423a2 リニアレール
423b 外板
423c アーム
423d 内部フレーム
423d1 底板部分
423d2 縦板部分
423e カム
423f カムフォロア
423g カムフォロア支持部材
423h リニアシャフト
423i リニアブシュ
423j 圧縮コイルばね
423k 蝶番
423l ストッパ
423n 内板
423p 連結板
423r 支点
424 水平移動ユニット
424a シリンダチューブ
424b ピストンロッド
425 連結部材
【技術分野】
【0001】
本発明は、昇降装置および昇降装置を備えた搬送システムに関し、特に、タクトタイムを短縮する技術に関する。
【背景技術】
【0002】
工場の生産ラインなどでは、ベルトコンベアやローラコンベアを利用して、製造された製品をコンテナ等に収容して搬出する装置が多く用いられている。このとき、製品が収容されたコンテナ(搬送対象物、ワーク)を搬出するラインと共に、次の製品を収容するための空のコンテナを搬入するラインが必要であるが、例えば、図9に示す特許文献1の搬送システムのように、空のコンテナ1を搬入するベルトコンベア装置2と製品が収容されたコンテナ1を搬出するローラコンベア装置3を鉛直方向に配置して上下2段とし、その間を可動床4を備えたリフター5を昇降させるコンテナ昇降装置6で連絡する構成を備えた搬送システムが、従来から用いられている。このような構成を備えた搬送システムの場合、リフターによって1つのコンテナが搬送された後、リフターが元の位置に戻ってくるまで次のコンテナは待っていなくてはならず、1つコンテナを搬送するのに少なくともリフターが一往復する時間を要する。そのため、タクトタイムの短縮には昇降装置における作業効率の向上が重要である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3216086号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、昇降装置における作業効率を上げるためにリフターの昇降速度を速くすると、リフターの停止制御が難しくなり、停止する際の衝撃が大きくなったり、ワークの載置安定性が損なわれて落下等の危険性が増したりする恐れがある。そのため、昇降速度の単純な高速化による作業効率の向上には限界がある。
そこで、本発明は、昇降速度を高速化することなく、昇降装置におけるタクトタイムが短縮された昇降装置および搬送システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明に係る昇降装置は、上下に配された第1搬送部と第2搬送部との間で、昇降により搬送対象物を受け渡す昇降装置であって、前記第1搬送部との間で前記搬送対象物の受け渡しを行う第1移載エリアと、前記第2搬送部との間で前記搬送対象物の受け渡しを行い、前記第1移載エリアに対して下方に設けられた第2移載エリアと、前記第1移載エリアと前記第2移載エリアとの間を往復して、当該間で前記搬送対象物を昇降させる昇降台と、を備え、前記第1移載エリアには、前記第1搬送部から前記搬送対象物を受け取り前記昇降台へと移載するか、または前記昇降台から前記搬送対象物を受け取り前記第1搬送部へと移載する移載部が設けられており、前記移載部は、前記搬送対象物が載置された状態の前記昇降台の前記第1移載エリアへの侵入時および前記第1移載エリアからの退出時には、前記昇降台の昇降により前記搬送対象物が搬送される際に通過する通過領域の外側へと退避自在に設けられていることを特徴とする。
【0006】
また、本発明に係る搬送システムは、上記昇降装置を備えることを特徴とする。
【発明の効果】
【0007】
本発明に係る昇降装置の構成によれば、搬送対象物が載置された状態の昇降台の第1移載エリアへの侵入および第1移載エリアからの退出が完了すると、移載部は、退避を解除して元の位置に戻り、第1搬送部との間で搬送対象物の受け渡し作業を行うことが可能である。従って、搬送対象物が載置された状態の昇降台が第1移載エリアへと侵入する場合、即ち、昇降台が第2移載エリアから第1移載エリアへと搬送対象物を搬送する場合には、移載部は昇降台から搬送対象物を受け取って第1搬送部へと渡す作業を行うことができ、移載部が上記作業を行っている間に、昇降台は、第2移載エリアへと降下して、次の搬送対象物を第2移載エリアから第1移載エリアへと搬送する作業を開始することができる。また、搬送対象物が載置された状態の昇降台が第1移載エリアから退出する場合、即ち、昇降台が第1移載エリアから第2移載エリアへと搬送対象物を搬送する場合には、搬送対象物が載置された昇降台が第1移載エリアから退出して第2移載エリアへと搬送対象物を搬送し、搬送対象物を第2搬送部に渡した後、次の搬送対象物を搬送するために再び第1移載エリアへと戻って来る間に、移載部は、次の搬送対象物を第1搬送部から受け取り、第1移載エリアにおいて昇降台へと搬送対象物を移載する準備を整えることができる。即ち、移載部による移載作業と昇降台による昇降搬送作業を同時に並行して行う構成とすることができ、これによりタクトタイムを短縮することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態に係る昇降装置および当該昇降装置を備えた搬送システムの概略構成を示す一部破断外観斜視図である。
【図2】移載ユニットの概略構成を示す外観斜視図である。
【図3】図2の矢印Dから見た移載ユニットの側面図である。
【図4】移載ユニットの動作を模式的に示す図であって、(a)は、ピストンが伸びている状態を示す側面図であり、(b)は、ピストンが収縮する移載部が下降した状態を示す図であり、(c)は、退避プロセス完了時の移載ユニットの状態を示す図である。
【図5】本発明の実施形態に係る昇降装置の降下搬送プロセスの一部を模式的に示す図である。(a)は、昇降装置にワークが搬入される前の状態における搬送システムの正面図であり、(a’)は、平面図であり、(a’’)は、ワークの搬入方向から見た側面図である。(b)は、昇降装置の移載部にワークが搬入された直後の状態における搬送システムの正面図であり、(b’)は、平面図であり、(b’’)は、ワークの搬入方向から見た側面図である。
【図6】図5の続きを示す図である。(a)は、移載部から昇降台にワークが移載された状態における搬送システムの正面図であり、(a’)は、平面図であり、(a’’)は、ワークの搬入方向から見た側面図である。(b)は、昇降台が降下開始する直前の状態における搬送システムの正面図であり、(b’)は、平面図であり、(b’’)は、ワークの搬入方向から見た側面図である。
【図7】変形例1に係る昇降装置の移載部の退避プロセスを模式的に示す図であって、(a)は、退避プロセス開始前の移載部および昇降台の状態を示す側面図であり、(b)は、退避プロセス完了時の移載部および昇降台の状態を示す側面図である。
【図8】変形例2に係る昇降装置の移載部の退避プロセスを模式的に示す図である。(a)は、退避プロセス開始前の移載部および昇降台の状態を示す平面図であり、(a’)は、そのワークの搬入方向から見た側面図である。(b)は、移載部が下降した状態を示す平面図であり、(b’)は、そのワークの搬入方向から見た側面図である。(c)は、退避プロセス完了時の状態を示す平面図であり、(c’)は、そのワークの搬入方向から見た側面図である。
【図9】特許文献1に示された従来の昇降装置および搬送システムを示す外観斜視図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態に係る昇降装置および搬送システムについて、図面を参照しながら説明する。
<実施形態>
[搬送システムの概略構成]
図1は、本発明の実施形態に係る昇降装置および搬送システムの構成を示す一部破断外観斜視図である。図1に示すように、本実施形態に係る昇降装置10を備える搬送システム100は、鉛直方向(Z軸方向)の上下に配されたベルトコンベア20(第1搬送部)およびベルトコンベア30(第2搬送部)を有し、ベルトコンベア20と30との間を昇降装置10が連絡している。ベルトコンベア20および30は、不図示の駆動源により回転駆動される。昇降装置10は、ベルトコンベア20および30のX方向(ベルトコンベア20の搬送方向)における端部間を連絡するように配設されており、鉛直方向に長尺なフレーム11上に直立した昇降軸12に沿って昇降する昇降台13を備える。昇降台13は、L字形の断面形状を有する長尺な部材が一対互いに所定の間隔を空けて平行に並べられて構成されている。昇降台13の前記長尺な部材の一端は、昇降軸12に沿って昇降する昇降ベース14に固定されており、昇降ベース14が昇降軸12に沿って昇降することにより、昇降台13が昇降される。以下、昇降ベース14の昇降により昇降台13が昇降されることを、簡略化して、単に昇降台13が昇降すると表現する。昇降台13の長尺な部材同士は、昇降台13の形状維持のために上記所定の間隔と同じ長さの補強部材15により連結され補強されている。
【0010】
なお、図1においては図示を省略したが、昇降台13の上昇限位置と下降限位置のフレーム側面には、停止用センサおよびスローダウン用センサが配設されており、フレーム11上部にはワーク確認用センサが配設されている。昇降手段としては、エアシリンダやチェーン等が用いられる。また、図1では、昇降台13が上昇限位置にある状態を示している。
【0011】
ベルトコンベア20のX方向側であって、上昇限位置にある昇降台13の両脇(Y方向およびY’方向)には、一対の移載ユニット40がそれぞれひとつずつ配設されている。移載ユニット40は、移載部41、移動部42、モータ43、ギアボックス44等を備える。移載部41は、ベルトコンベアから成り、ベルトコンベア20および昇降台13との間で、直接ワークの受け渡しを行う。移動部42は、詳しくは後述するが、移載部41を垂直方向および水平方向に移動させる。モータ43は、移載部41を回転駆動させる駆動源であり、モータ43の回転駆動力がギアボックス44内の一連のギア(不図示)を介して移載部41に伝達される。
【0012】
本実施形態においては、ベルトコンベア20は、上段に配されたワーク(搬送対象物)供給用のベルトコンベアであり、一対のベルトコンベアが互いに所定の間隔(ここでは、一対の移載部41間の間隔と略同じ)を空けて平行に配設されている。また、ベルトコンベア30は、下段に配されたワーク搬出用のベルトコンベアであり、ベルトコンベア20と同様に一対のベルトコンベアが互いに所定の間隔を空けて平行に配設されて成り、昇降台13が下降限位置にあるとき、双方のベルトコンベアのX方向端部間に昇降台13が位置するように配置されている。
【0013】
ベルトコンベア20によりX方向に搬送され、第1移載エリア7へと搬入されたワークは、第1移載エリア7においてベルトコンベア20のX方向端部から移載部41へと移載され、さらに移載部41から昇降台13へと移載される。そして昇降台13が第1移載エリアから下段の第2移載エリア8へと降下することによりワークは第2移載エリア8へと搬送され、第2移載エリア8において昇降台13からベルトコンベア30へと移載された後、ベルトコンベア30により搬出される。
【0014】
本実施形態においては、上段に配されたワーク供給用のベルトコンベア20から供給されたワークを、昇降装置10により下降させて下段に配されたワーク搬出用のベルトコンベア30へと受け渡す場合(以下、「降下搬送プロセス」という。)について主に説明するが、これに限定されるものではない。下段のベルトコンベア30から上段のベルトコンベア20へとワークを搬送する場合(以下、「上昇搬送プロセス」という。)については、後から述べる。
【0015】
[移載部の構成]
図2は、移載ユニット40の外観斜視図であり、図3は、図2の矢印D方向から見た側面図である。なお、図2,図3においては、一対の移載ユニット40のうち、Y方向側に配された移載ユニット40について図示しており、移載ユニット40の内部構造を示すために、カバー421(図1参照)を取り除いた状態で示している。また、モータ43およびギアボックス44(図1参照)については、図示を省略している。
【0016】
移載ユニット40は、上述のように、移載部41、移動部42、モータ43、およびギアボックス44から成る。移動部42は、基板422と、基板422の上側(Z方向)に設けられた垂直移動ユニット423と、基板422の下側(Z’方向)に設けられた水平移動ユニット424と、垂直移動ユニット423と水平移動ユニット424とを連結する連結部材425と、を備える。
【0017】
[垂直移動ユニット]
垂直移動ユニット423は、一対のリニアガイド423a、外板423b、一対のアーム423c、一対の内部フレーム423d、一対のカム423e、一対のカムフォロア423f、一対のカムフォロア支持部材423g、一対のリニアシャフト423h、一対のリニアブシュ423i、一対の圧縮コイルばね423j、一対の蝶番423k、一対のストッパ423l、一対のばねストッパ423m、内板423n、一対の連結板423p等を備える。
【0018】
リニアガイド423aは、リニアブロック423a1およびリニアレール423a2から成り、リニアブロック423a1は、基板422上にY軸方向に固設されたリニアレール423a2に沿って移動自在に設けられている。リニアブロック423a1には、X軸と直交する平面による断面がL字形の形状を有する内部フレーム423dが固定されており、内部フレーム423dのL字の底辺にあたる底板部分423d1には、X軸と直交する平面による断面形状が台形のカム423eが設けられている。
【0019】
内板423nには、貫通孔(不図示)が形成されている。当該貫通孔には、リニアブシュ423iが挿通された状態で固定されている。リニアブシュ423iにはリニアシャフト423hが軸方向に移動可能に挿通されており、リニアシャフト423hの一端は、内部フレーム423dのL字の縦の辺にあたる縦板部分423d2に固定されている。リニアシャフト423hの他端には、圧縮コイルばね423jが巻着されている。圧縮コイルばね423jのY側端部は、ばねストッパ423mにより係止されており、Y’側端部は、リニアブシュ423iにより係止されている。内板423nと外板423bとは、一対の連結板423pにより連結され、互いに固定されている。
【0020】
アーム423cの一端には移載部41が固定されており、他端は蝶番423kを介して外板423bに連結されている。これにより、移載部41は、外板423bに対して蝶番423kを中心に(X軸を中心に)回動可能となっている。また、アーム423cにはカムフォロア支持部材423gの一端が取着されており、カムフォロア支持部材423gの他端には、ローラから成るカムフォロア423fが回転可能に設けられ、カムフォロア423fは、カム423eの上面に接触している。
【0021】
[水平移動ユニット]
図2および図3に示すように、水平移動ユニット424は、シリンダチューブ424aやピストンロッド424bから成るエアシリンダであり、基板422の下面において、一対のリニアガイド423aの間に相当する位置に、Y側にシリンダチューブ424aが、Y’側にピストンロッド424bの外部に露出している方の端部424cが位置するように、Y軸に平行な方向に沿って配設されている。ピストンロッド424bの端部424cには、連結部材425が固定されており、連結部材425は、内部フレーム423dの縦板部分423d2に固定されている。これにより、ピストンロッド424bのY軸に平行な方向の運動が連結部材425を介して内部フレーム423dに伝達され、内部フレーム423dは、リニアブロック423a1と一体的にリニアガイド423aに沿って移動する。
【0022】
[移載ユニットの動作]
次に、水平移動ユニット424および垂直移動ユニット423が連動してどのように動作するのかについて説明する。
図4は、移載ユニット40の動作を示す図である。図4(a)は、ピストンロッド424bが最も伸びている状態(以下、これを「第1状態」という。)における移載ユニット40を示す側面図である。図4(b)は、ピストンロッド424bが縮む途中の状態(以下、これを「第2状態」という。)における移載ユニット40を示す側面図である。図4(c)は、ピストンロッド424bが最も縮んでいる状態(以下、これを「第3状態」という。)における移載ユニット40を示す側面図である。
【0023】
第1状態においては、カムフォロア423fはカム423eの上面上に位置しており、アーム423cは移載部41を略水平に支持している。このとき、圧縮コイルばね423jは、圧縮された状態である。
第2状態においては、ピストンロッド424bがY方向に収縮するにつれて連結部材425がリニアブロック423a1をY方向に移動させ、内部フレーム423dおよびカム423eがY方向に移動される。このとき、内部フレーム423dのY方向への移動と共にリニアシャフト423hもY方向へと移動されるが、リニアシャフト423hの移動の分だけ圧縮コイルばね423jは圧縮が解放される方向に伸びるため、リニアブシュ423iはY方向には移動せずに留まる。従って、リニアブシュ423iが固定されている内板423n、および連結板423p、外板423b、アーム423c、移載部41、カムフォロア支持部材423g、カムフォロア423fもY方向には移動しない。すると、カム423eはY方向に移動するが、カムフォロア423fはY方向に移動しないため、カムフォロア423fは相対的にカム423eの上面から斜面へとずり落ちるように移動し、カム423eの斜面に対して当接するようになる。これにより、アーム423cは蝶番423kを中心に垂直下方(Z’方向)に回動し、移載部41を第1状態よりも低い位置において支持する。なお、第1状態から第2状態に移行する際に、移載部41が下降する距離は、具体的には、例えば、10〜15〔mm〕程度である。
【0024】
そして、ピストンロッド424bがY方向にさらに収縮すると、リニアブロック423a1がさらにY方向へと移動する。これに伴い、縦板部分423d2がリニアブシュ423iと当接し、リニアブシュ423iを介して内板423nをY方向へと移動させる。これにより、外板423b、連結板423p、アーム423c、移載部41、カムフォロア支持部材423g、カムフォロア423f等が、リニアブロック423a1のY方向への移動と共にY方向に移動され、第3状態へと至る。なお、このとき、リニアシャフト423hのY方向側端部が外板423bと衝突しないように、外板423bには逃がし穴423qが設けられている。
【0025】
第3状態から第1状態へと戻る際には、上述とは逆のプロセスを経て元に戻る。第3状態から第2状態へと移行する際には、内部フレーム423dと共にリニアシャフト423hがY’方向に移動されると、圧縮コイルばね423jの弾性力により押されてリニアブシュ423iがY’方向に移動される。これに伴って内板423n、連結板423p、外板423b、アーム423c、移載部41、カムフォロア支持部材423g、カムフォロア423f等がY’方向に移動され、外板423bがストッパ423lと当接する。第2状態から第1状態へと移行する際には、外板423bがストッパ423lにより係止されているので、外板423b、内板423n、連結板423p、アーム423c、移載部41、カムフォロア支持部材423g、カムフォロア423f等はそれ以上Y’方向へと移動できないが、リニアブロック423a1、内部フレーム423d、カム423e、およびリニアシャフト423hはさらにY’方向へと移動される。このとき、リニアシャフト423hのY’方向への移動に伴い、圧縮コイルばね423jは圧縮される。また、カムフォロア423fは移動しないが、カム423eはY’方向へと移動するため、カムフォロア423fは、相対的にカム423eの斜面から上面へと乗り上げるように移動し、その結果、アーム423cが蝶番423kを中心に垂直上方(Z方向)に回動して移載部41を略水平に支持する状態となる。
【0026】
[移載部の退避プロセス]
続いて、ベルトコンベア20とベルトコンベア30との間でワークを受け渡すプロセスについて、図5および図6を参照して以下に説明する。なお、以下の説明においては、降下搬送プロセスについて先ず説明する。
図5および図6は、本実施形態における降下搬送プロセスを模式的に示す図である。図5(a)は、第1移載エリア7にワークWが搬入される前の状態を示す正面図であって、図5(a’)は、それを真上から見た平面図であり、図5(a’’)は、そのときの第1移載エリア7の様子をX方向側から見た側面図である。ワークWが第1移載エリア7に搬入される前の状態においては、移載ユニット40は第1状態であり、昇降台13は、一対の移載部41に挟まれる形でその間に位置し、昇降台13の最上面(ワークWが載置される載置面)は、移載部41の最上部よりも鉛直方向において若干低い位置に保持されている。
【0027】
図5(b)は、ベルトコンベア20から移載部41へとワークWが移載された状態を示す正面図であり、図5(b’)は、それを真上から(Z方向側から)見た平面図であり、図5(b’’)は、そのときの第1移載エリア7の様子をX方向側から見た側面図である。ワークWが移載部41へと受け渡された状態においては、ワークWは、上昇限位置にある昇降台13の載置面よりも若干高い位置に移載部41により支持されており、昇降台13にはまだ載置されていない。
【0028】
図5各図に示す移載部41の位置において、移載部41は、ベルトコンベア20との間でワークWの受け渡しを行う。この移載部41の位置を第1位置とする。
図6(a)は、ワークWが移載部41から昇降台13へと受け渡されたときの状態を示す正面図であって、図6(a’)は、それを真上から(Z方向側から)見た平面図であり、図6(a’’)は、そのときの第1移載エリア7の様子をX方向側から見た側面図である。このとき、移載ユニット40は第1状態から第2状態へと移行しており、アーム423cがZ’方向に回動して移載部41がZ’方向に移動される。これにより、移載部41の最上部は昇降台13の載置面よりも低い位置まで移動され、ワークWが昇降台13の載置面上に載置される。
【0029】
図6(b)は、昇降台13が第1移載エリア7から第2移載エリア8へと移動開始する直前の状態を示す正面図であり、図6(b’)は、それを真上から見た平面図であり、図6(b’’)は、そのときの第1移載エリア7の様子をX方向側から見た側面図である。このとき、移載ユニット40は第2態から第3態へと移行しており、移載部41は、図6(b)において破線で示すワークWの通過領域PのY軸方向における外側にまで退避した状態となっている。従って、昇降台13が下降する際に、ワークWと移載部41とがぶつかることがない。このときの移載部41の位置を第2位置とする。
【0030】
ここで、ベルトコンベア30のX方向側端部は、フレーム11に近接する位置まで延設されており、また、ベルトコンベア30のX方向側端部は、下降限位置にあるときの昇降台13よりも外側であってワークWの通過領域Pの内側に相当する位置に配設されている。さらに、第2移載エリア8において、昇降台13が下降限位置にあるとき、昇降台13は、一対のベルトコンベア30の間の位置であって、ベルトコンベア30の最上部よりも若干低い位置にある。これにより、昇降台13が下降して第2移載エリア8へとワークWを搬送する際に、昇降台13が下降限位置まで下降すると、ワークWが昇降台13からベルトコンベア30へと移載される。そして、ベルトコンベア30によりワークWが第2移載エリアの外に搬出されると、昇降台13は第1移載エリア7へと上昇して戻って来る。そして、昇降台13が下降して第2移載エリア8へとワークWを搬送し、ベルトコンベア30へとワークを受け渡して第1移載エリア7へと戻って来る間に、移載ユニット40は、第3状態から第2状態を経て第1状態へと移行し、次のワークWを受け入れる準備が整った状態となる。
【0031】
このとき、本実施形態の構成によると、昇降台13が第1移載エリア7まで戻って来るのを待たずに、次のワークWをベルトコンベア20から移載部41へと移載することができる。即ち、移載部41に次のワークWが移載完了された状態であっても、昇降台13が第1移載エリア7に戻って来るときに、昇降台13は一対の移載部41に支持されたワークWの下側から移載部41の間の位置に戻って来るため、また、昇降台13の上昇限位置は、移載部41に支持された状態のワークWの最下部よりも低い位置にあるため、昇降台13は移載部41にもワークWにも接触することなく上昇限位置まで戻って来ることができる。
【0032】
以上説明したように、本実施形態の構成によると、昇降台13がワークWを第1移載エリア7から第2移載エリア8へと搬送し、第2移載エリア8においてワークWをベルトコンベア30へと受け渡して再び第1移載エリア7へと戻って来るのを待たずして、次のワークWを第1移載エリア7の移載部41へと運び込むことができるため、昇降台13が第1移載エリアへと戻ってきたときには、すぐに次のワークWを第2移載エリア8へと搬送することができ、これにより、タクトタイムの短縮を図ることができる。
【0033】
また、移載部41がワークWの通過領域Pの外側に退避する際に、第1状態から第2状態へと移行して昇降台13の載置面、即ちワークWの下面よりも低い位置まで下がった後、第3状態へと移行して通過領域Pの外側へと退避するため、退避する際にワークWの下面を摺擦することがないため、移載部41およびワークWが受けるダメージを抑制することができるとともに、移載部41に引きずられてワークWがバランスを崩し落下する等の虞を減じることができる。
【0034】
さらに、移載部41がベルトコンベアから成り、ベルトコンベア30が下降限位置における昇降台13の両脇まで延設されていることにより、昇降台13が可動床を備える必要がないため、昇降中のワークの安定性が増し、途中で落下する危険性を減ずることができる。
加えて、第1移載エリア7においても第2移載エリア8においても昇降台13とベルトコンベア20および30との間のワークWの受け渡しにプッシャー等を用いなくてもよいため、プッシャーによるワークの損傷を減じることができる。
【0035】
また、移載部41の垂直移動および水平移動を、ひとつのエアシリンダ(水平移動ユニット424)で行うことができるため、複数の駆動源を備える必要がなく、コスト抑制および省スペース化に資することができる。
上記説明においては、上段の第1移載エリア7から下段の第2移載エリア8へとワークを搬送する降下搬送プロセスについて述べたが、第2移載エリア8から第1移載エリア7へとワークを搬送する場合においても、上記と同様の効果が期待できる。
【0036】
この場合、昇降台13が第2移載エリア8から第1移載エリア7へとワークを搬送するために上昇している間、移載ユニット40は第3状態にあり、移載部41は移動部42により第2位置に移動されている。従って、ワークWは、昇降台13の上昇により搬送される際に、移載部41と衝突することなく、第1移載エリア7へと移動することができる。そして、ワークWが第1移載エリア7に移動されたら、即ち、昇降台13が上昇限位置に到達すると、移動部42は移載部41を第1位置へと移動させ、移載部41により、ワークWが昇降台13からピックアップされる。そして、モータ43を駆動して移載部41を駆動させ、ワークWを移載部41からベルトコンベア20へと移載する。このとき、ワークWの移載部41からベルトコンベア20への移載完了を待たずに、昇降台13は第2移載エリア8へと降下して次のワークWをピックアップすることができるため、タクトタイムを短縮することができる。
【0037】
なお、昇降台13が第2移載エリア8において次のワークWをピックアップして、第1移載エリア7へと移動開始するまでの間に、移載部41はワークWをベルトコンベア20へと移載完了させ、移動部42によって再び第2位置へと移動されている。
<変形例>
以上、本発明の構成を実施形態に基づいて説明したが、本発明は上記実施形態に限られず、以下のような変形例を実施することができる。なお、説明の重複を避けるため、上記実施形態と同じ構成要素については、同符号を付して、その説明を省略する。
【0038】
(1)図7は、変形例1に係る昇降装置の移載ユニットにおける移載部41の退避プロセスを説明する図であって、第1移載エリア7の様子をX方向側から見た側面図である。図7(a)は、ワークWがベルトコンベア20から移載部41に移載された直後の状態を示す図であり、実施形態における図5(b’’)に相当する状態を示す。図7(b)は、移載部41がワークWの通過領域Pの外側に退避した状態を示す図であり、図6(b’’)に相当する状態を示す。図7(a),(b)に示すように、アーム6423cを支点6423rを中心に略90度回動させることによっても、ワークWを移載部41から昇降台13へと移載させた後、移載部41をワークWの通過領域Pの外側へと退避させることができる。なお、本変形例においては、図7(a)の移載部41の位置が第1位置であり、図7(b)の移載部41の位置が第2位置である。また、アーム6423cの長さおよび支点6423rの位置は、Z’方向に90度回動した時に、移載部41が通過領域Pの外側に位置するような長さおよび位置に設定されている。アーム6423cを回動させる駆動源としては、実施形態のようにエアシリンダを用いてもよいし、モータ等を用いてもよい。
【0039】
(2)上記実施形態および変形例1においては、一対の移載ユニット40が上昇限位置における昇降台13の両脇に配置されている場合について説明したが、これに限定されるものではない。例えば、移載ユニットを1つのみ備える構成であってもよい。
図8は、本変形例の昇降装置の移載ユニット740における移載部41の退避プロセスを説明する図である。図8(a)は、ワークWがベルトコンベア20から移載部741へと移載されたときの第1移載エリア7の様子を真上から(Z方向側から)見た平面図であり、図8(a’)は、それをX方向側から見た側面図である。図8(a),(a’)に示すように、1つの移載部41が、ワークWの重心である中央部近傍を支持するように、一対のベルトコンベア20の間に相当する位置の搬送方向X側に配設されている。なお、本変形例においても、移載部741は、ベルトコンベアから成るが、1つの移載部741でワークWを支持するため、上記実施形態および変形例1における移載部41よりも幅広のベルトコンベアを採用すると、ワークWの安定性がよい。昇降台713は、平面視した場合の形状がコの字状であり、このとき、コの字の内部に移載部741が位置し、コの字の開口部分にアーム423cが位置するように配置されている。また、このときの昇降台713の最上部(ワークWが載置される載置面)は、移載部741の最上部よりも若干低い位置にあり、ワークWと昇降台713とは接触していない。
【0040】
図8(b)は、ワークWが移載部741から昇降台713へと受け渡されたときの第1移載エリア7の様子を真上から(Z方向側から)見た平面図であり、図8(b’)は、それをX方向側から見た側面図である。このとき、アーム423cは、鉛直下方(Z’方向)に下がるように回動され、これにより、ワークWが昇降台713の載置面上に載置される。なお、昇降台713がコの字形状をしており、コの字の開口部分にアーム423cが位置しているため、アーム423cが回動する際に、昇降台713とぶつかることがない。
【0041】
図8(c)は、昇降台713が第1移載エリア7から第2移載エリア8へと移動開始する直前の状態の第1移載エリア7の様子を真上から(Z方向側から)見た平面図であり、図8(c’)は、それをX方向側から見た側面図である。本変形例の構成によっても、実施の形態と同様にして、移載部741を移動部42によりワークWが搬送される際に通過する通過領域P(図8(c’)において、破線で示す。)のY軸方向における外側にまで退避させることができる。
【0042】
なお、変形例2における移載ユニット740を1つのみ備える構成において、変形例1と同様に、アーム423cを略90度回動させて通過領域の外側まで移載部741を退避させる構成としてもよい。この場合においても、アーム423cがコの字形状の昇降台713の開口部分に配されているため、回動の際に昇降台713とぶつかる虞がない。
また、変形例2においては、移載ユニット740は1つのみ備えられており、移載ユニット740の退避方向は1方向のみでよいため、昇降装置10のフレーム11および昇降軸12の設置位置は、昇降台713よりもベルトコンベア20の搬送方向側(X方向側)に限られず、昇降台713を挟んで移動部42の反対側(Y’方向側)に設置されてもよい。さらには、昇降装置10のフレーム11および昇降軸12の設置位置が昇降台713のY’方向側である場合には、移動部42を昇降台713のX方向側に設けてもよい。
【0043】
なお、上記説明においては、変形例2に係る昇降台713の平面視形状がコの字状であるとしたが、これに限定されるものではない。例えば、昇降台713は、間に移載部741を挟んでその両脇に長尺な部材がアーム423cと平行な方向(図8においては、Y軸に平行な方向)に配列された形状であってもよい。
(3)上記実施形態および各変形例においては、ベルトコンベア20は、一対のベルトコンベアが平行に配設されて構成されていたが、これに限定されるものではない。例えば、一本のベルトコンベアから成ってもよい。この場合、一対のベルトコンベアにより構成されている場合よりも幅広のベルトコンベアを用いると、ワーク搬送の安定性が向上する。
【0044】
(4)上記実施形態および変形例1においては、昇降台13は、断面形状がL字形で長尺な形状を有する部材が一対互いに所定の間隔を空けて平行に並べられた状態で連結された構成であったが、これに限定されるものではない。例えば、昇降台13は、第1移載エリア7にあるときに、一対の移載部41間に収まる形状であれば、平板な板状部材から成ってもよいし、ブロック状の形状を有していてもよい。なお、実施形態および変形例1における昇降台13のように隙間を有する構成であれば、ワークを搬送していないときの昇降の際に受ける空気抵抗を小さくすることができる。
【0045】
(5)上記実施形態および各変形例においては、ベルトコンベア20,30および、移載部41は、ベルトコンベアから成っていたが、これに限定されるものではない。例えば、ローラコンベアやその他の搬送装置から成ってもよい。ワークを移載するための駆動力を備えない搬送装置を用いる場合には、プッシャー等を併用してもよい。
(6)上記実施形態および各変形例においては、移動部42の構成は、垂直移動ユニット423が基板422の上側に、水平移動ユニット424が基板422の下側に配設されていたが、これに限られない。例えば、基板422の下側に垂直移動ユニット423が、上側に水平移動ユニット424が配設される構成であってもよい。
【0046】
なお、上記実施形態に係る昇降装置および搬送システムの部分的な構成、および各変形例に係る構成を、適宜組み合わせてなる昇降装置および搬送システムであっても良い。また、上記実施形態および各変形例における説明に記載した数値は好ましいものを例示しているだけであり、それに限定されることはない。また、各図面における各部材の寸法および比は、一例として挙げたものであり、必ずしも実在の昇降装置および搬送システムの寸法および比と一致するとは限らない。さらに、本発明の技術的思想の範囲を逸脱しない範囲で、昇降装置および搬送システムの構成に適宜変更を加えることは可能である。
【産業上の利用可能性】
【0047】
本発明は、昇降装置および搬送システムのタクトタイムを短縮する技術として利用可能である。
【符号の説明】
【0048】
1 コンテナ
2 ベルトコンベア装置
3 ローラコンベア装置
4 可動床
5 リフター
6 コンテナ昇降装置
7 第1移載エリア
8 第2移載エリア
10 昇降装置
11,50 フレーム
13 昇降台
20,30 ベルトコンベア
40 移載ユニット
41 移載部
42 移動部
422 基板
423 垂直移動ユニット
423a リニアガイド
423a1 リニアブロック
423a2 リニアレール
423b 外板
423c アーム
423d 内部フレーム
423d1 底板部分
423d2 縦板部分
423e カム
423f カムフォロア
423g カムフォロア支持部材
423h リニアシャフト
423i リニアブシュ
423j 圧縮コイルばね
423k 蝶番
423l ストッパ
423n 内板
423p 連結板
423r 支点
424 水平移動ユニット
424a シリンダチューブ
424b ピストンロッド
425 連結部材
【特許請求の範囲】
【請求項1】
上下に配された第1搬送部と第2搬送部との間で、昇降により搬送対象物を受け渡す昇降装置であって、
前記第1搬送部との間で前記搬送対象物の受け渡しを行う第1移載エリアと、
前記第2搬送部との間で前記搬送対象物の受け渡しを行い、前記第1移載エリアに対して下方に設けられた第2移載エリアと、
前記第1移載エリアと前記第2移載エリアとの間を往復して、当該間で前記搬送対象物を昇降させる昇降台と、
を備え、
前記第1移載エリアには、前記第1搬送部から前記搬送対象物を受け取り前記昇降台へと移載するか、または前記昇降台から前記搬送対象物を受け取り前記第1搬送部へと移載する移載部が設けられており、
前記移載部は、前記搬送対象物が載置された状態の前記昇降台の前記第1移載エリアへの侵入時および前記第1移載エリアからの退出時には、前記昇降台の昇降により前記搬送対象物が搬送される際に通過する通過領域の外側へと退避自在に設けられている
ことを特徴とする昇降装置。
【請求項2】
前記移載部を、前記第1搬送部との間で前記搬送対象物の受け渡しを行う第1位置と、前記通過領域の外側に退避した第2位置との間で移動させる移動部をさらに備える
ことを特徴とする請求項1に記載の昇降装置。
【請求項3】
前記第2位置における前記移載部は、前記第1移載エリアに停留している時の前記昇降台の前記搬送対象物が積載される載置面よりも低い
ことを特徴とする請求項2に記載の昇降装置。
【請求項4】
前記昇降台が、前記搬送対象物を前記第1移載エリアから前記第2移載エリアへと搬送する場合において、前記移動部は、前記移載部を、前記載置面よりも低い位置まで下降させた後に水平方向に移動させて、前記第2位置に移動させる
ことを特徴とする請求項2に記載の昇降装置。
【請求項5】
前記昇降台が、前記搬送対象物を前記第2移載エリアから前記第1移載エリアへと搬送する場合において、前記移動部は、前記移載部を、前記載置面よりも低い位置において前記昇降台の外側であって前記通過領域の内側の位置まで水平方向に移動させた後に上昇させて、前記第1位置に移動させる
ことを特徴とする請求項2に記載の昇降装置。
【請求項6】
前記移動部は、前記移載部を水平方向に移動させるための駆動源と、前記駆動源による水平方向の運動エネルギーを垂直方向の運動エネルギーに変換する変換部と、を備える
ことを特徴とする請求項4に記載の昇降装置。
【請求項7】
前記移載部は、ベルトコンベアである
ことを特徴とする請求項1に記載の昇降装置。
【請求項8】
前記変換部は、カムにより運動エネルギーの変換を行う
ことを特徴とする請求項6に記載の昇降装置。
【請求項9】
前記駆動源は、エアシリンダである
ことを特徴とする請求項6に記載の昇降装置。
【請求項10】
前記第1移載エリアには、前記移載部が一対設けられており、前記一対の移載部は、前記昇降台を間に挟んで前記第1搬送部の搬送方向に沿って互いに平行に配されている
ことを特徴とする請求項1に記載の昇降装置。
【請求項11】
前記移動部は、前記移載部を、前記通過領域の外側に位置する支点を中心に回動させて、前記第1の位置と前記第2の位置との間で移動させる
ことを特徴とする請求項2に記載の昇降装置。
【請求項12】
上下に配された第1搬送部と第2搬送部と、請求項1に記載の昇降装置と、を備える
ことを特徴とする搬送システム。
【請求項1】
上下に配された第1搬送部と第2搬送部との間で、昇降により搬送対象物を受け渡す昇降装置であって、
前記第1搬送部との間で前記搬送対象物の受け渡しを行う第1移載エリアと、
前記第2搬送部との間で前記搬送対象物の受け渡しを行い、前記第1移載エリアに対して下方に設けられた第2移載エリアと、
前記第1移載エリアと前記第2移載エリアとの間を往復して、当該間で前記搬送対象物を昇降させる昇降台と、
を備え、
前記第1移載エリアには、前記第1搬送部から前記搬送対象物を受け取り前記昇降台へと移載するか、または前記昇降台から前記搬送対象物を受け取り前記第1搬送部へと移載する移載部が設けられており、
前記移載部は、前記搬送対象物が載置された状態の前記昇降台の前記第1移載エリアへの侵入時および前記第1移載エリアからの退出時には、前記昇降台の昇降により前記搬送対象物が搬送される際に通過する通過領域の外側へと退避自在に設けられている
ことを特徴とする昇降装置。
【請求項2】
前記移載部を、前記第1搬送部との間で前記搬送対象物の受け渡しを行う第1位置と、前記通過領域の外側に退避した第2位置との間で移動させる移動部をさらに備える
ことを特徴とする請求項1に記載の昇降装置。
【請求項3】
前記第2位置における前記移載部は、前記第1移載エリアに停留している時の前記昇降台の前記搬送対象物が積載される載置面よりも低い
ことを特徴とする請求項2に記載の昇降装置。
【請求項4】
前記昇降台が、前記搬送対象物を前記第1移載エリアから前記第2移載エリアへと搬送する場合において、前記移動部は、前記移載部を、前記載置面よりも低い位置まで下降させた後に水平方向に移動させて、前記第2位置に移動させる
ことを特徴とする請求項2に記載の昇降装置。
【請求項5】
前記昇降台が、前記搬送対象物を前記第2移載エリアから前記第1移載エリアへと搬送する場合において、前記移動部は、前記移載部を、前記載置面よりも低い位置において前記昇降台の外側であって前記通過領域の内側の位置まで水平方向に移動させた後に上昇させて、前記第1位置に移動させる
ことを特徴とする請求項2に記載の昇降装置。
【請求項6】
前記移動部は、前記移載部を水平方向に移動させるための駆動源と、前記駆動源による水平方向の運動エネルギーを垂直方向の運動エネルギーに変換する変換部と、を備える
ことを特徴とする請求項4に記載の昇降装置。
【請求項7】
前記移載部は、ベルトコンベアである
ことを特徴とする請求項1に記載の昇降装置。
【請求項8】
前記変換部は、カムにより運動エネルギーの変換を行う
ことを特徴とする請求項6に記載の昇降装置。
【請求項9】
前記駆動源は、エアシリンダである
ことを特徴とする請求項6に記載の昇降装置。
【請求項10】
前記第1移載エリアには、前記移載部が一対設けられており、前記一対の移載部は、前記昇降台を間に挟んで前記第1搬送部の搬送方向に沿って互いに平行に配されている
ことを特徴とする請求項1に記載の昇降装置。
【請求項11】
前記移動部は、前記移載部を、前記通過領域の外側に位置する支点を中心に回動させて、前記第1の位置と前記第2の位置との間で移動させる
ことを特徴とする請求項2に記載の昇降装置。
【請求項12】
上下に配された第1搬送部と第2搬送部と、請求項1に記載の昇降装置と、を備える
ことを特徴とする搬送システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−56763(P2013−56763A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−197422(P2011−197422)
【出願日】平成23年9月9日(2011.9.9)
【出願人】(592127965)NKE株式会社 (28)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月9日(2011.9.9)
【出願人】(592127965)NKE株式会社 (28)
【Fターム(参考)】
[ Back to top ]