
映像処理装置及び方法
【課題】 レンダリングのための遠近効果の過程において入力深度映像のホールフィリングを極めて迅速に行いながら信頼できる結果を提供する映像処理装置及び方法を提供する。
【解決手段】 入力深度映像が入力されれば、映像処理装置のアウトライアー除去部は全体ピクセルの深度値を分析して平均的な値に一定の程度以上を離れたピクセルを除去し、単独に処理する。そして、ホールをフィリングして入力深度映像を再生成する。この過程において、プッシュプル方法のホールフィリング処理が行われる。
【解決手段】 入力深度映像が入力されれば、映像処理装置のアウトライアー除去部は全体ピクセルの深度値を分析して平均的な値に一定の程度以上を離れたピクセルを除去し、単独に処理する。そして、ホールをフィリングして入力深度映像を再生成する。この過程において、プッシュプル方法のホールフィリング処理が行われる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は映像処理装置及び方法に関し、より詳細には、深度カメラ(depth camera)によって取得された深度映像を用いて逆透視投影(perspective unprojection)を行う過程で適用される映像処理に関する。
【背景技術】
【0002】
深度映像は、赤外線を用いるTOF(Time Of Flight)方式またはパターン光(Patterned light)方式の深度カメラを用いて取得される。ところが、深度カメラによって取得された深度映像には、深度カメラの視点によって遠近効果(perspective projection)が反映される。
【0003】
例えば、低いところから直六面体のオブジェクトを見上げれば、オブジェクトの上方は遠いため小さく見え、下方は近いため大きく見えるのが遠近効果であると理解される。
【0004】
深度映像を用いて直接3D映像レンダリングを行ったり、3D映像レンダリングのための3Dモデルを生成することができるが、このような過程では前述した遠近効果を除去する遠近効果が必要である。
【0005】
このような遠近効果の過程では、映像における座標であるu、v値が逆転したりもする。したがって、遠近効果の前に深度映像をより信頼することのできる3Dモデルの構築が要求されている。
【0006】
このような3Dモデルの構築過程で優れた技術的な効果を期待できる部分がホールフィリングとポイントクラウドのメッシュ形態マッピングである。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、レンダリングのための遠近効果の過程において入力深度映像のホールフィリングを極めて迅速に行いながら信頼できる結果を提供する映像処理装置及び方法を提供する。
【0008】
また、本発明の目的は、遠近効果の過程においてポイントクラウド形態の3D情報が入力深度映像に関する場合、メッシュ基盤の3D幾何情報を極めて迅速且つ正確に生成する映像処理装置及び方法を提供する。
【課題を解決するための手段】
【0009】
本発明の一実施形態によれば、入力深度映像のアウトライアーを除去するアウトライアー除去部と、アウトライアーの除去された前記入力深度映像にプッシュプル方法によってホールフィリングを行ってホールフィリング処理された深度映像を生成するホールフィリング処理部とを備える映像処理装置が提供される。
【0010】
この場合、前記プッシュプル方法は、前記アウトライアーの除去された前記入力深度映像を複数のブロックに分類し、前記ブロックの深度値平均を回帰的に算出して最終平均値を算出し、前記最終平均値を再び回帰的にトップダウンを適用して前記アウトライアーの除去された前記入力深度映像のホールフィリングを行うものである。
【0011】
本発明の一実施形態によれば、前記アウトライアー除去部は、前記入力深度映像の少なくとも一部領域に対する深度値平均を求め、前記深度値平均に予め指定されたレベル以上の偏差を有する値を単独に処理して前記入力深度映像のアウトライアーを除去する。
【0012】
一方、前記映像処理装置は、前記ホールフィリング処理された深度映像にガウスフィルタリングを行うフィルタ部をさらに備えてもよい。
【0013】
また、前記映像処理装置は、前記ホールフィリング処理された深度映像で隣接のピクセルをメッシュに構成してメッシュ基盤の3D幾何モデルを生成するメッシュ生成部をさらに備えてもよい。
【0014】
この場合、前記映像処理装置は、前記3D幾何モデルに含まれた複数のメッシュに対してそれぞれの法線を算出する法線算出部をさらに備えてもよい。また、前記映像処理装置は、前記入力深度映像に関連する入力カラー映像のカラー値を前記3D幾何モデルに含まれた複数のメッシュに関連づけるテクスチャコーディネート部をさらに備えてもよい。
【0015】
さらに、前記映像処理装置は、前記3D幾何モデルに逆投影マトリックスを適用して前記入力深度映像に関連するカメラ視点におけるパースペクティブプロジェクションを除去する逆投影演算部をさらに備えてもよい。
【0016】
本発明の他の一実施形態によれば、入力深度映像で互いに隣接する少なくとも3つのピクセル当たり1つずつのメッシュを生成して前記入力深度映像に関連する3D幾何モデルを生成するメッシュ生成部と、前記3D幾何モデルに含まれたメッシュそれぞれの法線を算出する法線算出部と、前記入力深度映像に関連する入力カラー映像から前記3D幾何モデルに含まれたメッシュそれぞれのテクスチャ情報を取得して前記入力深度映像及び前記入力カラー映像に対する3Dモデルを生成するテクスチャコーディネート部とを備える映像処理装置が提供される。
【0017】
本発明の一実施形態によれば、前記映像処理装置は、前記3Dモデルに対して前記入力深度映像または前記入力カラー映像のうち少なくとも1つに関連するカメラ視点によるパースペクティブプロジェクションを除去する逆投影演算部をさらに備える。
【0018】
この場合、前記逆投影演算部は、前記3Dモデルに逆投影マトリックスを適用して前記パースペクティブプロジェクションを除去してもよい。
【0019】
本発明の他の一実施形態によれば、入力深度映像のアウトライアーを除去するステップと、アウトライアーの除去された前記入力深度映像にプッシュプル方法を用いてホールフィリングを行ってホールフィリング処理された深度映像を生成するステップとを含む映像処理方法が提供される。
【0020】
この場合、前記プッシュプル方法は、前記アウトライアーの除去された前記入力深度映像を複数のブロックに分類し、前記ブロックの深度値平均を回帰的に算出して最終平均値を算出し、前記最終平均値を再び回帰的にトップダウン適用して前記アウトライアーの除去された前記入力深度映像のホールフィリングを行うものであってもよい。
【0021】
一方、前記アウトライアーを除去するステップは、前記入力深度映像の少なくとも一部領域に対する深度値平均を求め、前記深度値平均に予め指定されたレベル以上の偏差を有する値を単独に処理して前記入力深度映像のアウトライアーを除去してもよい。
【発明の効果】
【0022】
本発明によると、入力深度映像のホールフィリング処理が極めて高速化され、比較的に低い費用で信頼度の高い映像を処理することができる。
【0023】
また、本発明によると、遠近効果の過程以前にポイントクラウド形態をメッシュ基盤に変更する場合、極めて迅速に且つ正確な映像を処理することができる。
【図面の簡単な説明】
【0024】
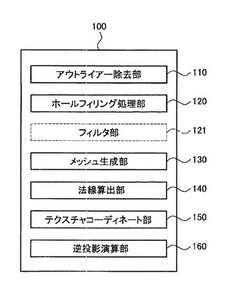
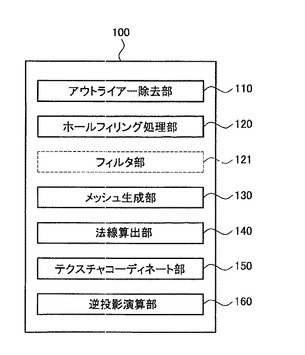
【図1】本発明の一実施形態に係る映像処理装置を示すブロック図である。
【図2】本発明の一実施形態に係る映像処理装置に入力されるカラー映像及び深度映像を示す概念図である。
【図3】本発明の一実施形態に係るプッシュプル方式のホールフィリングを説明するための概念図である。
【図4】本発明の一実施形態に係るプッシュプル方式のホールフィリングを説明するための概念図である。
【図5】本発明の一実施形態に係るホールフィリング処理された深度映像を説明する概念図である。
【図6】本発明の一実施形態に係るポイントクラウド形態の3D情報を用いてメッシュ基盤の3D幾何モデルを生成する過程を説明するための概念図である。
【図7】本発明の一実施形態に係る映像処理方法を示すフローチャートである。
【発明を実施するための形態】
【0025】
以下、本発明の実施形態を添付する図面を参照しながら詳細に説明する。
【0026】
図1は、本発明の一実施形態に係る映像処理装置100を示すブロック図である。
【0027】
本発明の一実施形態によれば、映像処理装置は入力深度映像のノイズを除去するなど、周辺の平均深度値に比べて偏差の大きい深度値をアウトライアー(outlier)と見なして値を除去するアウトライアー除去部110を備える。このような過程で深度映像にホールが発生したり、従来に存在したホールがより大きくなるなどのアーチファクトが発生することがある。
【0028】
これによって、映像処理装置100に含まれ得るホールフィリング処理部120は、このような深度映像のホールを充填する映像処理を行う。
【0029】
本発明の一実施形態によれば、ホールフィリング処理部120は、深度映像内のホールをプッシュプル方法を用いて除去する。このようなプッシュプル方法は、ボトムアップ方式で深度の平均値を回帰的に上位グループに拡張算出して全体の深度映像の平均値を算出した後、これをトップダウン方式で再び下部構造に回帰的に適用して行いながら、一律的且つ迅速にホールを除去する。上記のようにプッシュプル方法については、図3〜図4を参照して詳細に後述する。
【0030】
このようにホールフィリング処理が完了すると、選択的にフィルタ部121がホールフィリング処理の完了した深度映像から完全に除去されないノイズを除去する様々なフィルタリングを行う。このようなフィルタリングは、スムージングフィルタリングであると理解される。本発明の一実施形態によれば、フィルタ部121は、ガウスフィルタリングを行って処理された深度映像の品質を向上させることができる。
【0031】
メッシュ生成部130ないしテクスチャコーディネート部150は、深度映像を用いて3Dモデルを生成する。
【0032】
このような3Dモデル生成過程において、メッシュ生成部130は、深度映像における隣接ピクセルを1つのメッシュでグルーピングする方式により一律的且つ規則的にメッシュを生成する。このような過程によってポイントクラウドをメッシュ基盤の3D幾何情報に生成する過程が極めて高速化され、これに関する詳細な内容は図6を参照して後述する。
【0033】
そして、映像処理装置100の法線算出部140はこのようなメッシュそれぞれの法線を算出し、テクスチャコーディネート部150が入力カラー映像のテクスチャ情報を各幾何情報、例えば、メッシュの頂点に関連づけて3Dモデルを生成する。より詳細な過程は図6を参照して後述する。
【0034】
これによって、映像処理装置100の逆投影演算部160は、逆透視投影のために予め算出された逆投影マトリックスを構築された3Dモデルに適用し、これにより逆透視投影の実行された現実世界のオブジェクトに適する3Dモデルが生成される。この過程についても図6を参照して詳細に後述することにする。
【0035】
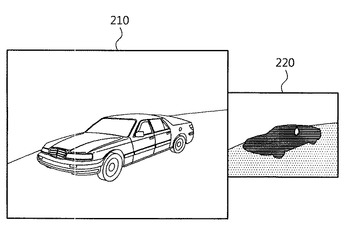
図2は、本発明の一実施形態に係る映像処理装置に入力されるカラー映像210及び入力深度映像220を示す概念図である。
【0036】
入力深度映像220は、入力カラー映像210に比べて解像度が低くてもよい。本明細書では、入力深度映像220の視点は入力カラー映像210の視点とマッチングされていると仮定する。
【0037】
しかし、同一のオブジェクトを撮影しても、カラーカメラ及び深度カメラの実現形態やセンサの構造などによって撮影視点や及び/または撮影を行うカメラ視点の不整合が発生し得る。
【0038】
このような不整合は、カメラ視点差の変換を反映したカラー深度映像マッチングのために様々な方式の映像処理により克服され得る。ただし、上記のようにカメラ視点において入力深度映像210と入力カラー映像がマッチングされていると仮定する。
【0039】
一方、入力深度映像220は、深度カメラのセンサ性能の劣悪さ、深度折り畳み現象、防音過程などで発生するホールを有することがある。
【0040】
本発明の一実施形態によれば、図1に示すアウトライアー除去部110は、入力深度映像220のノイズを除去するなど、周辺の平均深度値に比べて偏差の大きい深度値はアウトライアーと見なして値を除去する。
【0041】
このような過程において、深度映像220にホールが発生したり、従来に存在したホールがより大きくなるなどのアーチファクトが発生することがある。
【0042】
本発明の一実施形態によれば、このような入力深度映像220を用いて3D幾何モデルを形成し、かかる3D幾何モデルとカラー映像210のテクスチャ情報をマッチングさせて3Dモデルを生成する。
【0043】
そして、このような3Dモデルに対して遠近効果の過程などを介してレンダリングを行うことで、3D映像、例えば、立体映像、マルチビュー映像などを生成することができる。
【0044】
本発明の一実施形態によれば、図1に示すホールフィリング処理部120は、深度映像220内のホールをプッシュプル方法を用いて除去する。
【0045】
プッシュプル方法は、図3から図4を参照してより詳細に後述する。
【0046】
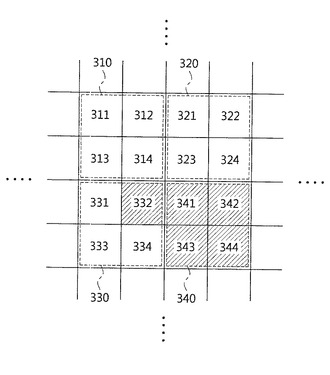
図3は、本発明の一実施形態に係るプッシュプル方式のホールフィリングを説明するための概念図である。
【0047】
深度映像のピクセル311、312、313、314、321、322、323、324、331、332、333、334、341、342、343、344などが示されている。このようなピクセルは全体の深度映像の一部であってもよい。
【0048】
ところが、陰影処理されているピクセル332、341、342、343、344はホールと仮定する。すなわち、このピクセル332、341、342、343、344はアウトライアーと判断してアウトライアー除去部110によって除去されたり、または、他の理由によって深度値が存在しない領域である。
【0049】
本発明の一部他の実施形態において、深度映像に遠近効果を先に行う場合には、このような遠近効果の過程で発生するホールもピクセル332、341、342、343、344に分類されてもよい。
【0050】
以下、単独に取り扱われるピクセル332、341、342、343、344を処理する方法について説明し、具体的なホールが生じた理由については説明しない。本発明の様々な実施形態によってホールの生成原因の差異は本発明の思想を逸脱しない限り本発明の範囲に属すると解釈される。
【0051】
本発明の一実施形態によれば、ホールフィリング処理部120は、まず、ピクセルを4個の単位にグルーピングして平均値を求める。
【0052】
ピクセル311、312、313、314が1つのグループ310にグルーピングされ、ピクセル321、322、323、324が他の1つのグループ320にグルーピングされる。このような方式によってグループ330及びグループ340が生成されていることが確認される。
【0053】
ところが、グループ330には、深度値の存在しないホールに該当するピクセル332が存在する。そして、グループ340はそれに属する各ピクセル341、342、343、344が全てホールに該当する。
【0054】
この場合、本発明の一実施形態によれば、グループ330の深度値平均を求めるときはホールのピクセル332を考慮することなく、深度値が存在するピクセル331、333、334の深度値平均を求め、この平均がグループ330全体の平均と決定する。
【0055】
そして、グループ340のように深度値が存在するピクセルのないグループの場合、そのグループそのもの340が残り、算出された平均値はない。
【0056】
このような方式によって他のグループに対しても回帰的な平均値を算出する。すなわち、グループ310、グループ320、グループ330及びグループ340をグルーピングして、さらに上位のグループにグルーピングする。そして、上位グループの平均深度値はそれぞれのグループ310、320、330及び340の平均に決定する。
【0057】
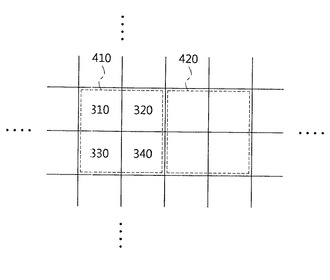
図4は、本発明の一実施形態に係るプッシュプル方式のホールフィリングを説明するための概念図である。
【0058】
しかし、このような回帰的な算出にも全体がホールであるため深度値が存在しないグループ340は依然として残っていることから、上位グループ410の平均算出においてグループ340は反映されず、グループ310、320、330の平均深度値を上位グループ410の深度値と決定する。
【0059】
このような過程が他の上位グループ420などに行われる。そして、再び回帰的に上位グループ410、420などはより大きい上位グループの平均算出に寄与する。
【0060】
このように回帰的に拡張すると、従来には入力された深度映像220の全体を代表する1つの値が生成され得る。その後、この値を再び下位グループに拡張適用してホールを満たす。
【0061】
例えば、図3に示すグループ330の上位グループの値がV_330とすれば、この値をピクセル331、333、334の深度値であるV_331、V_333、V_334に比べて全体平均がV_330になるピクセル332の深度値V_332を算出する。
【0062】
このように映像処理装置100のホールフィリング処理部120は、ボトムアップ方式により平均値を回帰的に拡張算出して全体の深度映像の平均値を算出した後、これをトップダウン方式により下部構造に適用しながら一律的且つ迅速にホールを除去する。
【0063】
このような方式を用いてホールフィリング処理が完了された映像を図5に示す通りである。
【0064】
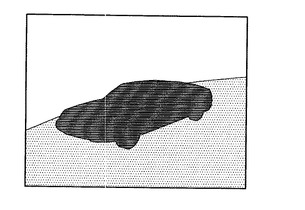
図5は、本発明の一実施形態に係るホールフィリング処理された深度映像を説明する概念図である。
【0065】
入力深度映像220に存在したホールが除去され、より自然な深度映像が生成されたことが確認される。
【0066】
本発明の一実施形態によれば、映像処理装置100は、このようなホールフィリング処理が完了した深度映像から完全に除去されないノイズを除去するためにスムージングフィルタリングを行う。
【0067】
例えば、フィルタ部121は、ガウスフィルタリングを行って処理された深度映像の品質を向上させることができる。
【0068】
このように深度映像のホールフィリング及び選択的なフィルタリングが実行された後には、深度映像を用いた3Dモデルの生成が行われる。
【0069】
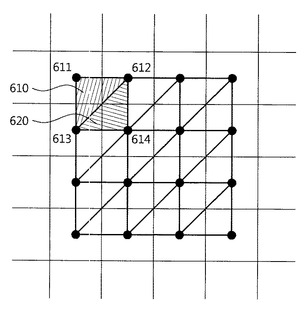
図6は、本発明の一実施形態に係るポイントクラウド形態の3D情報を用いてメッシュ基盤の3D幾何モデルを生成する過程を説明するための概念図である。
【0070】
深度映像によって完成された幾何情報は、ポイントクラウドの形態として理解される。すなわち、深度映像のX軸及びY軸のインデックスであるu、vに深度値zが加えられた3次元ベクトルと理解される。
【0071】
ところが、映像処理やレンダリング過程でメッシュ基盤の3Dモデルがもっと選好されることがある。本発明の一実施形態によれば、映像処理装置100のメッシュ生成部130は、前述の過程によってホールフィリングや選択的なスムージングフィルタリングが実行された深度映像のポイントクラウドを用いてメッシュ基盤3次元幾何情報を構築する。
【0072】
通常、ポイントクラウドは、数多い3次元ベクトルと表現される点の集合である。したがって、メッシュ基盤の3D幾何情報を作るために点を関連づける過程は極めて様々である。
【0073】
どのポイントを1つのメッシュにグルーピングするかに関する内容は様々な研究が施行されている。
【0074】
本発明の一実施形態によれば、深度映像は連続性の保持されるオブジェクトを撮影したものであり、深度映像内で隣接するピクセルは実際オブジェクトでも隣接のポイントに関連される可能性が高いという前提をもって、深度映像で隣接のピクセルを一律的にグルーピングしてメッシュを生成する。
【0075】
例えば、ピクセル611、612、613は深度映像内で互いに隣接する位置にあるが、本発明の一実施形態によれば、このような隣接するピクセル611、612、613を1つにグルーピングしてメッシュ610を生成する。
【0076】
そして、ピクセル612、613、614を1つにグルーピングしてメッシュ620に生成する。このように一律的且つ規則的にメッシュを生成することで、本発明によれば、ポイントクラウドをメッシュ基盤の3D幾何情報で生成する過程が極めて高速化されることができる。
【0077】
これによって、映像処理装置100の法線算出部140は、ピクセル612、613、614それぞれに対応する3つのベクトルu、v、zの外積を求めることによってメッシュ620の法線を簡単に算出することができる。
【0078】
このように法線が算出されて映像処理装置100のテクスチャコーディネート部150は、深度映像とカラー映像との間のテクスチャ情報、例えば、カラー情報などをマッチングしてもよい。
【0079】
深度映像とカラー映像の解像度が異なる場合のアップスケールがこの過程で行なわれる。このような過程によって3D映像のレンダリングのための3Dモデルが構築される。
【0080】
そして、映像処理装置100の逆投影演算部160は、逆透視投影(perspective unprojection)のために予め算出された逆投影マトリックスを前記構築された3Dモデルに適用し、これによって逆透視投影が実行された現実世界のオブジェクトに適する3Dモデルが生成される。
【0081】
その後、高さフィールドに対するレイトレーシングなどのレンダリングによって立体映像を生成することができる。
【0082】
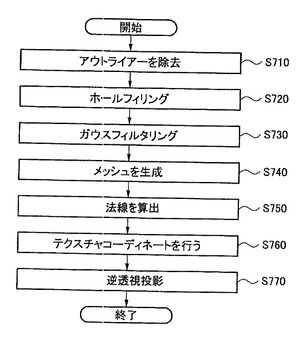
図7は、本発明の一実施形態に係る映像処理方法を示すフローチャートである。
【0083】
本発明の一実施形態によれば、映像処理方法において、入力深度映像内の周辺の平均深度値に比べて偏差の大きい深度値がアウトライアーと見なされて除去される(S710)。
【0084】
そして、このような過程で発生したり大きくなったホールは、ホールフィリング過程を実行して除去される(S720)。
【0085】
ここで、ホールフィリングステップは、図1に示すホールフィリング処理部120が深度映像内のホールをプッシュプル方法を用いて除去する。プッシュプル方法によるホール除去については図2〜図4を参照して上述した通りである。
【0086】
このようにホールフィリング処理の後には、選択的にガウスフィルタリングが実行されて深度映像の品質を向上させる(S730)。
【0087】
そして、本発明の一実施形態によれば、映像処理装置100のメッシュ生成部130が深度映像における隣接ピクセルを1つのメッシュにグルーピングする方式によって一律的且つ規則的にメッシュを生成する(S740)。このような過程は図6を参照して上述した通りである。
【0088】
そして、映像処理装置100の法線算出部140がこのようなメッシュそれぞれの法線を算出し(S750)、テクスチャコーディネート部150が入力カラー映像のテクスチャ情報を各幾何情報、例えば、メッシュの頂点に関連づけて3Dモデルを生成する(S760)。
【0089】
そして、映像処理装置100の逆投影演算部160が逆透視投影のために予め算出された逆投影マトリックスを前記構築された3Dモデルに適用する(S770)。以上の過程は図6を参照して上述した通りである。
【0090】
本発明の一実施形態に係る方法は、多様なコンピュータ手段を介して様々な処理を実行することができるプログラム命令の形態で実現され、コンピュータ読取可能な記録媒体に記録されてもよい。コンピュータ読取可能な媒体は、プログラム命令、データファイル、データ構造などの単独または組み合わせたものを含んでもよい。媒体に記録されるプログラム命令は、本発明の目的のために特別に設計されて構成されたものでもよく、コンピュータソフトウェア分野の技術を有する当業者にとって公知のものであり使用可能なものであってもよい。コンピュータ読取可能な記録媒体の例としては、ハードディスク、フロッピー(登録商標)ディスク及び磁気テープのような磁気媒体、CD−ROM、DVDのような光記録媒体、光ディスクのような光磁気媒体、及びROM、RAM、フラッシュメモリなどのようなプログラム命令を格納して実行するように特別に構成されたハードウェア装置が含まれてもよい。プログラム命令の例としては、コンパイラによって生成されるような機械語コード(machine code)だけでなく、インタプリタなどを用いてコンピュータによって実行され得る高級言語コード(higher level code)を含む。上述したハードウェア装置は、本発明の動作を行うために1つ以上のソフトウェアのレイヤで動作するように構成されてもよい。
【0091】
以上のように本発明を限定された実施形態と図面によって説明したが、本発明は、上記の実施形態に限定されることなく、本発明が属する分野における通常の知識を有する者であれば、このような実施形態から多様な修正及び変形が可能である。
【0092】
したがって、本発明の範囲は、開示された実施形態に限定して定められるものではなく、特許請求の範囲及び特許請求の範囲と均等なものなどによって定められるものである。
【符号の説明】
【0093】
100 映像処理装置
110 アウトライアー除去部
120 ホールフィリング処理部
121 フィルタ部
130 メッシュ生成部
140 法線算出部
150 テクスチャコーディネート部
160 逆投影演算部
【技術分野】
【0001】
本発明の実施形態は映像処理装置及び方法に関し、より詳細には、深度カメラ(depth camera)によって取得された深度映像を用いて逆透視投影(perspective unprojection)を行う過程で適用される映像処理に関する。
【背景技術】
【0002】
深度映像は、赤外線を用いるTOF(Time Of Flight)方式またはパターン光(Patterned light)方式の深度カメラを用いて取得される。ところが、深度カメラによって取得された深度映像には、深度カメラの視点によって遠近効果(perspective projection)が反映される。
【0003】
例えば、低いところから直六面体のオブジェクトを見上げれば、オブジェクトの上方は遠いため小さく見え、下方は近いため大きく見えるのが遠近効果であると理解される。
【0004】
深度映像を用いて直接3D映像レンダリングを行ったり、3D映像レンダリングのための3Dモデルを生成することができるが、このような過程では前述した遠近効果を除去する遠近効果が必要である。
【0005】
このような遠近効果の過程では、映像における座標であるu、v値が逆転したりもする。したがって、遠近効果の前に深度映像をより信頼することのできる3Dモデルの構築が要求されている。
【0006】
このような3Dモデルの構築過程で優れた技術的な効果を期待できる部分がホールフィリングとポイントクラウドのメッシュ形態マッピングである。
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の目的は、レンダリングのための遠近効果の過程において入力深度映像のホールフィリングを極めて迅速に行いながら信頼できる結果を提供する映像処理装置及び方法を提供する。
【0008】
また、本発明の目的は、遠近効果の過程においてポイントクラウド形態の3D情報が入力深度映像に関する場合、メッシュ基盤の3D幾何情報を極めて迅速且つ正確に生成する映像処理装置及び方法を提供する。
【課題を解決するための手段】
【0009】
本発明の一実施形態によれば、入力深度映像のアウトライアーを除去するアウトライアー除去部と、アウトライアーの除去された前記入力深度映像にプッシュプル方法によってホールフィリングを行ってホールフィリング処理された深度映像を生成するホールフィリング処理部とを備える映像処理装置が提供される。
【0010】
この場合、前記プッシュプル方法は、前記アウトライアーの除去された前記入力深度映像を複数のブロックに分類し、前記ブロックの深度値平均を回帰的に算出して最終平均値を算出し、前記最終平均値を再び回帰的にトップダウンを適用して前記アウトライアーの除去された前記入力深度映像のホールフィリングを行うものである。
【0011】
本発明の一実施形態によれば、前記アウトライアー除去部は、前記入力深度映像の少なくとも一部領域に対する深度値平均を求め、前記深度値平均に予め指定されたレベル以上の偏差を有する値を単独に処理して前記入力深度映像のアウトライアーを除去する。
【0012】
一方、前記映像処理装置は、前記ホールフィリング処理された深度映像にガウスフィルタリングを行うフィルタ部をさらに備えてもよい。
【0013】
また、前記映像処理装置は、前記ホールフィリング処理された深度映像で隣接のピクセルをメッシュに構成してメッシュ基盤の3D幾何モデルを生成するメッシュ生成部をさらに備えてもよい。
【0014】
この場合、前記映像処理装置は、前記3D幾何モデルに含まれた複数のメッシュに対してそれぞれの法線を算出する法線算出部をさらに備えてもよい。また、前記映像処理装置は、前記入力深度映像に関連する入力カラー映像のカラー値を前記3D幾何モデルに含まれた複数のメッシュに関連づけるテクスチャコーディネート部をさらに備えてもよい。
【0015】
さらに、前記映像処理装置は、前記3D幾何モデルに逆投影マトリックスを適用して前記入力深度映像に関連するカメラ視点におけるパースペクティブプロジェクションを除去する逆投影演算部をさらに備えてもよい。
【0016】
本発明の他の一実施形態によれば、入力深度映像で互いに隣接する少なくとも3つのピクセル当たり1つずつのメッシュを生成して前記入力深度映像に関連する3D幾何モデルを生成するメッシュ生成部と、前記3D幾何モデルに含まれたメッシュそれぞれの法線を算出する法線算出部と、前記入力深度映像に関連する入力カラー映像から前記3D幾何モデルに含まれたメッシュそれぞれのテクスチャ情報を取得して前記入力深度映像及び前記入力カラー映像に対する3Dモデルを生成するテクスチャコーディネート部とを備える映像処理装置が提供される。
【0017】
本発明の一実施形態によれば、前記映像処理装置は、前記3Dモデルに対して前記入力深度映像または前記入力カラー映像のうち少なくとも1つに関連するカメラ視点によるパースペクティブプロジェクションを除去する逆投影演算部をさらに備える。
【0018】
この場合、前記逆投影演算部は、前記3Dモデルに逆投影マトリックスを適用して前記パースペクティブプロジェクションを除去してもよい。
【0019】
本発明の他の一実施形態によれば、入力深度映像のアウトライアーを除去するステップと、アウトライアーの除去された前記入力深度映像にプッシュプル方法を用いてホールフィリングを行ってホールフィリング処理された深度映像を生成するステップとを含む映像処理方法が提供される。
【0020】
この場合、前記プッシュプル方法は、前記アウトライアーの除去された前記入力深度映像を複数のブロックに分類し、前記ブロックの深度値平均を回帰的に算出して最終平均値を算出し、前記最終平均値を再び回帰的にトップダウン適用して前記アウトライアーの除去された前記入力深度映像のホールフィリングを行うものであってもよい。
【0021】
一方、前記アウトライアーを除去するステップは、前記入力深度映像の少なくとも一部領域に対する深度値平均を求め、前記深度値平均に予め指定されたレベル以上の偏差を有する値を単独に処理して前記入力深度映像のアウトライアーを除去してもよい。
【発明の効果】
【0022】
本発明によると、入力深度映像のホールフィリング処理が極めて高速化され、比較的に低い費用で信頼度の高い映像を処理することができる。
【0023】
また、本発明によると、遠近効果の過程以前にポイントクラウド形態をメッシュ基盤に変更する場合、極めて迅速に且つ正確な映像を処理することができる。
【図面の簡単な説明】
【0024】
【図1】本発明の一実施形態に係る映像処理装置を示すブロック図である。
【図2】本発明の一実施形態に係る映像処理装置に入力されるカラー映像及び深度映像を示す概念図である。
【図3】本発明の一実施形態に係るプッシュプル方式のホールフィリングを説明するための概念図である。
【図4】本発明の一実施形態に係るプッシュプル方式のホールフィリングを説明するための概念図である。
【図5】本発明の一実施形態に係るホールフィリング処理された深度映像を説明する概念図である。
【図6】本発明の一実施形態に係るポイントクラウド形態の3D情報を用いてメッシュ基盤の3D幾何モデルを生成する過程を説明するための概念図である。
【図7】本発明の一実施形態に係る映像処理方法を示すフローチャートである。
【発明を実施するための形態】
【0025】
以下、本発明の実施形態を添付する図面を参照しながら詳細に説明する。
【0026】
図1は、本発明の一実施形態に係る映像処理装置100を示すブロック図である。
【0027】
本発明の一実施形態によれば、映像処理装置は入力深度映像のノイズを除去するなど、周辺の平均深度値に比べて偏差の大きい深度値をアウトライアー(outlier)と見なして値を除去するアウトライアー除去部110を備える。このような過程で深度映像にホールが発生したり、従来に存在したホールがより大きくなるなどのアーチファクトが発生することがある。
【0028】
これによって、映像処理装置100に含まれ得るホールフィリング処理部120は、このような深度映像のホールを充填する映像処理を行う。
【0029】
本発明の一実施形態によれば、ホールフィリング処理部120は、深度映像内のホールをプッシュプル方法を用いて除去する。このようなプッシュプル方法は、ボトムアップ方式で深度の平均値を回帰的に上位グループに拡張算出して全体の深度映像の平均値を算出した後、これをトップダウン方式で再び下部構造に回帰的に適用して行いながら、一律的且つ迅速にホールを除去する。上記のようにプッシュプル方法については、図3〜図4を参照して詳細に後述する。
【0030】
このようにホールフィリング処理が完了すると、選択的にフィルタ部121がホールフィリング処理の完了した深度映像から完全に除去されないノイズを除去する様々なフィルタリングを行う。このようなフィルタリングは、スムージングフィルタリングであると理解される。本発明の一実施形態によれば、フィルタ部121は、ガウスフィルタリングを行って処理された深度映像の品質を向上させることができる。
【0031】
メッシュ生成部130ないしテクスチャコーディネート部150は、深度映像を用いて3Dモデルを生成する。
【0032】
このような3Dモデル生成過程において、メッシュ生成部130は、深度映像における隣接ピクセルを1つのメッシュでグルーピングする方式により一律的且つ規則的にメッシュを生成する。このような過程によってポイントクラウドをメッシュ基盤の3D幾何情報に生成する過程が極めて高速化され、これに関する詳細な内容は図6を参照して後述する。
【0033】
そして、映像処理装置100の法線算出部140はこのようなメッシュそれぞれの法線を算出し、テクスチャコーディネート部150が入力カラー映像のテクスチャ情報を各幾何情報、例えば、メッシュの頂点に関連づけて3Dモデルを生成する。より詳細な過程は図6を参照して後述する。
【0034】
これによって、映像処理装置100の逆投影演算部160は、逆透視投影のために予め算出された逆投影マトリックスを構築された3Dモデルに適用し、これにより逆透視投影の実行された現実世界のオブジェクトに適する3Dモデルが生成される。この過程についても図6を参照して詳細に後述することにする。
【0035】
図2は、本発明の一実施形態に係る映像処理装置に入力されるカラー映像210及び入力深度映像220を示す概念図である。
【0036】
入力深度映像220は、入力カラー映像210に比べて解像度が低くてもよい。本明細書では、入力深度映像220の視点は入力カラー映像210の視点とマッチングされていると仮定する。
【0037】
しかし、同一のオブジェクトを撮影しても、カラーカメラ及び深度カメラの実現形態やセンサの構造などによって撮影視点や及び/または撮影を行うカメラ視点の不整合が発生し得る。
【0038】
このような不整合は、カメラ視点差の変換を反映したカラー深度映像マッチングのために様々な方式の映像処理により克服され得る。ただし、上記のようにカメラ視点において入力深度映像210と入力カラー映像がマッチングされていると仮定する。
【0039】
一方、入力深度映像220は、深度カメラのセンサ性能の劣悪さ、深度折り畳み現象、防音過程などで発生するホールを有することがある。
【0040】
本発明の一実施形態によれば、図1に示すアウトライアー除去部110は、入力深度映像220のノイズを除去するなど、周辺の平均深度値に比べて偏差の大きい深度値はアウトライアーと見なして値を除去する。
【0041】
このような過程において、深度映像220にホールが発生したり、従来に存在したホールがより大きくなるなどのアーチファクトが発生することがある。
【0042】
本発明の一実施形態によれば、このような入力深度映像220を用いて3D幾何モデルを形成し、かかる3D幾何モデルとカラー映像210のテクスチャ情報をマッチングさせて3Dモデルを生成する。
【0043】
そして、このような3Dモデルに対して遠近効果の過程などを介してレンダリングを行うことで、3D映像、例えば、立体映像、マルチビュー映像などを生成することができる。
【0044】
本発明の一実施形態によれば、図1に示すホールフィリング処理部120は、深度映像220内のホールをプッシュプル方法を用いて除去する。
【0045】
プッシュプル方法は、図3から図4を参照してより詳細に後述する。
【0046】
図3は、本発明の一実施形態に係るプッシュプル方式のホールフィリングを説明するための概念図である。
【0047】
深度映像のピクセル311、312、313、314、321、322、323、324、331、332、333、334、341、342、343、344などが示されている。このようなピクセルは全体の深度映像の一部であってもよい。
【0048】
ところが、陰影処理されているピクセル332、341、342、343、344はホールと仮定する。すなわち、このピクセル332、341、342、343、344はアウトライアーと判断してアウトライアー除去部110によって除去されたり、または、他の理由によって深度値が存在しない領域である。
【0049】
本発明の一部他の実施形態において、深度映像に遠近効果を先に行う場合には、このような遠近効果の過程で発生するホールもピクセル332、341、342、343、344に分類されてもよい。
【0050】
以下、単独に取り扱われるピクセル332、341、342、343、344を処理する方法について説明し、具体的なホールが生じた理由については説明しない。本発明の様々な実施形態によってホールの生成原因の差異は本発明の思想を逸脱しない限り本発明の範囲に属すると解釈される。
【0051】
本発明の一実施形態によれば、ホールフィリング処理部120は、まず、ピクセルを4個の単位にグルーピングして平均値を求める。
【0052】
ピクセル311、312、313、314が1つのグループ310にグルーピングされ、ピクセル321、322、323、324が他の1つのグループ320にグルーピングされる。このような方式によってグループ330及びグループ340が生成されていることが確認される。
【0053】
ところが、グループ330には、深度値の存在しないホールに該当するピクセル332が存在する。そして、グループ340はそれに属する各ピクセル341、342、343、344が全てホールに該当する。
【0054】
この場合、本発明の一実施形態によれば、グループ330の深度値平均を求めるときはホールのピクセル332を考慮することなく、深度値が存在するピクセル331、333、334の深度値平均を求め、この平均がグループ330全体の平均と決定する。
【0055】
そして、グループ340のように深度値が存在するピクセルのないグループの場合、そのグループそのもの340が残り、算出された平均値はない。
【0056】
このような方式によって他のグループに対しても回帰的な平均値を算出する。すなわち、グループ310、グループ320、グループ330及びグループ340をグルーピングして、さらに上位のグループにグルーピングする。そして、上位グループの平均深度値はそれぞれのグループ310、320、330及び340の平均に決定する。
【0057】
図4は、本発明の一実施形態に係るプッシュプル方式のホールフィリングを説明するための概念図である。
【0058】
しかし、このような回帰的な算出にも全体がホールであるため深度値が存在しないグループ340は依然として残っていることから、上位グループ410の平均算出においてグループ340は反映されず、グループ310、320、330の平均深度値を上位グループ410の深度値と決定する。
【0059】
このような過程が他の上位グループ420などに行われる。そして、再び回帰的に上位グループ410、420などはより大きい上位グループの平均算出に寄与する。
【0060】
このように回帰的に拡張すると、従来には入力された深度映像220の全体を代表する1つの値が生成され得る。その後、この値を再び下位グループに拡張適用してホールを満たす。
【0061】
例えば、図3に示すグループ330の上位グループの値がV_330とすれば、この値をピクセル331、333、334の深度値であるV_331、V_333、V_334に比べて全体平均がV_330になるピクセル332の深度値V_332を算出する。
【0062】
このように映像処理装置100のホールフィリング処理部120は、ボトムアップ方式により平均値を回帰的に拡張算出して全体の深度映像の平均値を算出した後、これをトップダウン方式により下部構造に適用しながら一律的且つ迅速にホールを除去する。
【0063】
このような方式を用いてホールフィリング処理が完了された映像を図5に示す通りである。
【0064】
図5は、本発明の一実施形態に係るホールフィリング処理された深度映像を説明する概念図である。
【0065】
入力深度映像220に存在したホールが除去され、より自然な深度映像が生成されたことが確認される。
【0066】
本発明の一実施形態によれば、映像処理装置100は、このようなホールフィリング処理が完了した深度映像から完全に除去されないノイズを除去するためにスムージングフィルタリングを行う。
【0067】
例えば、フィルタ部121は、ガウスフィルタリングを行って処理された深度映像の品質を向上させることができる。
【0068】
このように深度映像のホールフィリング及び選択的なフィルタリングが実行された後には、深度映像を用いた3Dモデルの生成が行われる。
【0069】
図6は、本発明の一実施形態に係るポイントクラウド形態の3D情報を用いてメッシュ基盤の3D幾何モデルを生成する過程を説明するための概念図である。
【0070】
深度映像によって完成された幾何情報は、ポイントクラウドの形態として理解される。すなわち、深度映像のX軸及びY軸のインデックスであるu、vに深度値zが加えられた3次元ベクトルと理解される。
【0071】
ところが、映像処理やレンダリング過程でメッシュ基盤の3Dモデルがもっと選好されることがある。本発明の一実施形態によれば、映像処理装置100のメッシュ生成部130は、前述の過程によってホールフィリングや選択的なスムージングフィルタリングが実行された深度映像のポイントクラウドを用いてメッシュ基盤3次元幾何情報を構築する。
【0072】
通常、ポイントクラウドは、数多い3次元ベクトルと表現される点の集合である。したがって、メッシュ基盤の3D幾何情報を作るために点を関連づける過程は極めて様々である。
【0073】
どのポイントを1つのメッシュにグルーピングするかに関する内容は様々な研究が施行されている。
【0074】
本発明の一実施形態によれば、深度映像は連続性の保持されるオブジェクトを撮影したものであり、深度映像内で隣接するピクセルは実際オブジェクトでも隣接のポイントに関連される可能性が高いという前提をもって、深度映像で隣接のピクセルを一律的にグルーピングしてメッシュを生成する。
【0075】
例えば、ピクセル611、612、613は深度映像内で互いに隣接する位置にあるが、本発明の一実施形態によれば、このような隣接するピクセル611、612、613を1つにグルーピングしてメッシュ610を生成する。
【0076】
そして、ピクセル612、613、614を1つにグルーピングしてメッシュ620に生成する。このように一律的且つ規則的にメッシュを生成することで、本発明によれば、ポイントクラウドをメッシュ基盤の3D幾何情報で生成する過程が極めて高速化されることができる。
【0077】
これによって、映像処理装置100の法線算出部140は、ピクセル612、613、614それぞれに対応する3つのベクトルu、v、zの外積を求めることによってメッシュ620の法線を簡単に算出することができる。
【0078】
このように法線が算出されて映像処理装置100のテクスチャコーディネート部150は、深度映像とカラー映像との間のテクスチャ情報、例えば、カラー情報などをマッチングしてもよい。
【0079】
深度映像とカラー映像の解像度が異なる場合のアップスケールがこの過程で行なわれる。このような過程によって3D映像のレンダリングのための3Dモデルが構築される。
【0080】
そして、映像処理装置100の逆投影演算部160は、逆透視投影(perspective unprojection)のために予め算出された逆投影マトリックスを前記構築された3Dモデルに適用し、これによって逆透視投影が実行された現実世界のオブジェクトに適する3Dモデルが生成される。
【0081】
その後、高さフィールドに対するレイトレーシングなどのレンダリングによって立体映像を生成することができる。
【0082】
図7は、本発明の一実施形態に係る映像処理方法を示すフローチャートである。
【0083】
本発明の一実施形態によれば、映像処理方法において、入力深度映像内の周辺の平均深度値に比べて偏差の大きい深度値がアウトライアーと見なされて除去される(S710)。
【0084】
そして、このような過程で発生したり大きくなったホールは、ホールフィリング過程を実行して除去される(S720)。
【0085】
ここで、ホールフィリングステップは、図1に示すホールフィリング処理部120が深度映像内のホールをプッシュプル方法を用いて除去する。プッシュプル方法によるホール除去については図2〜図4を参照して上述した通りである。
【0086】
このようにホールフィリング処理の後には、選択的にガウスフィルタリングが実行されて深度映像の品質を向上させる(S730)。
【0087】
そして、本発明の一実施形態によれば、映像処理装置100のメッシュ生成部130が深度映像における隣接ピクセルを1つのメッシュにグルーピングする方式によって一律的且つ規則的にメッシュを生成する(S740)。このような過程は図6を参照して上述した通りである。
【0088】
そして、映像処理装置100の法線算出部140がこのようなメッシュそれぞれの法線を算出し(S750)、テクスチャコーディネート部150が入力カラー映像のテクスチャ情報を各幾何情報、例えば、メッシュの頂点に関連づけて3Dモデルを生成する(S760)。
【0089】
そして、映像処理装置100の逆投影演算部160が逆透視投影のために予め算出された逆投影マトリックスを前記構築された3Dモデルに適用する(S770)。以上の過程は図6を参照して上述した通りである。
【0090】
本発明の一実施形態に係る方法は、多様なコンピュータ手段を介して様々な処理を実行することができるプログラム命令の形態で実現され、コンピュータ読取可能な記録媒体に記録されてもよい。コンピュータ読取可能な媒体は、プログラム命令、データファイル、データ構造などの単独または組み合わせたものを含んでもよい。媒体に記録されるプログラム命令は、本発明の目的のために特別に設計されて構成されたものでもよく、コンピュータソフトウェア分野の技術を有する当業者にとって公知のものであり使用可能なものであってもよい。コンピュータ読取可能な記録媒体の例としては、ハードディスク、フロッピー(登録商標)ディスク及び磁気テープのような磁気媒体、CD−ROM、DVDのような光記録媒体、光ディスクのような光磁気媒体、及びROM、RAM、フラッシュメモリなどのようなプログラム命令を格納して実行するように特別に構成されたハードウェア装置が含まれてもよい。プログラム命令の例としては、コンパイラによって生成されるような機械語コード(machine code)だけでなく、インタプリタなどを用いてコンピュータによって実行され得る高級言語コード(higher level code)を含む。上述したハードウェア装置は、本発明の動作を行うために1つ以上のソフトウェアのレイヤで動作するように構成されてもよい。
【0091】
以上のように本発明を限定された実施形態と図面によって説明したが、本発明は、上記の実施形態に限定されることなく、本発明が属する分野における通常の知識を有する者であれば、このような実施形態から多様な修正及び変形が可能である。
【0092】
したがって、本発明の範囲は、開示された実施形態に限定して定められるものではなく、特許請求の範囲及び特許請求の範囲と均等なものなどによって定められるものである。
【符号の説明】
【0093】
100 映像処理装置
110 アウトライアー除去部
120 ホールフィリング処理部
121 フィルタ部
130 メッシュ生成部
140 法線算出部
150 テクスチャコーディネート部
160 逆投影演算部
【特許請求の範囲】
【請求項1】
入力深度映像のアウトライアーを除去するアウトライアー除去部と、
アウトライアーの除去された前記入力深度映像にプッシュプル方法によってホールフィリングを行ってホールフィリング処理された深度映像を生成するホールフィリング処理部と、
を備えることを特徴とする映像処理装置。
【請求項2】
前記プッシュプル方法は、前記アウトライアーの除去された前記入力深度映像を複数のブロックに分類し、前記ブロックの深度値平均を回帰的に算出して最終平均値を算出し、前記最終平均値を再び回帰的にトップダウン適用して前記アウトライアーの除去された前記入力深度映像のホールフィリングを行うことを特徴とする請求項1に記載の映像処理装置。
【請求項3】
前記アウトライアー除去部は、前記入力深度映像の少なくとも一部領域に対する深度値平均を求め、前記深度値平均に予め指定されたレベル以上の偏差を有する値を単独に処理して前記入力深度映像のアウトライアーを除去することを特徴とする請求項1に記載の映像処理装置。
【請求項4】
前記ホールフィリング処理された深度映像にガウスフィルタリングを行うフィルタ部をさらに備えることを特徴とする請求項1に記載の映像処理装置。
【請求項5】
前記ホールフィリング処理された深度映像で隣接のピクセルをメッシュに構成してメッシュ基盤の3D幾何モデルを生成するメッシュ生成部をさらに備えることを特徴とする請求項1に記載の映像処理装置。
【請求項6】
前記3D幾何モデルに含まれた複数のメッシュに対してそれぞれの法線を算出する法線算出部をさらに備えることを特徴とする請求項5に記載の映像処理装置。
【請求項7】
前記入力深度映像に関連する入力カラー映像のカラー値を前記3D幾何モデルに含まれた複数のメッシュに関連づけるテクスチャコーディネート部をさらに備えることを特徴とする請求項6に記載の映像処理装置。
【請求項8】
前記3D幾何モデルに逆投影マトリックスを適用して前記入力深度映像に関連するカメラ視点におけるパースペクティブプロジェクションを除去する逆投影演算部をさらに備えることを特徴とする請求項5に記載の映像処理装置。
【請求項9】
入力深度映像で互いに隣接する少なくとも3つのピクセル当たり1つずつのメッシュを生成して前記入力深度映像に関連する3D幾何モデルを生成するメッシュ生成部と、
前記3D幾何モデルに含まれたメッシュそれぞれの法線を算出する法線算出部と、
前記入力深度映像に関連する入力カラー映像から前記3D幾何モデルに含まれたメッシュそれぞれのテクスチャ情報を取得して前記入力深度映像及び前記入力カラー映像に対する3Dモデルを生成するテクスチャコーディネート部と、
を備えることを特徴とする映像処理装置。
【請求項10】
前記3Dモデルに対して前記入力深度映像または前記入力カラー映像のうち少なくとも1つに関連するカメラ視点によるパースペクティブプロジェクションを除去する逆投影演算部をさらに備えることを特徴とする請求項9に記載の映像処理装置。
【請求項11】
前記逆投影演算部は、前記3Dモデルに逆投影マトリックスを適用して前記パースペクティブプロジェクションを除去することを特徴とする請求項10に記載の映像処理装置。
【請求項12】
入力深度映像のアウトライアーを除去するステップと、
アウトライアーの除去された前記入力深度映像にプッシュプル方法を用いてホールフィリングを行ってホールフィリング処理された深度映像を生成するステップと、
を含むことを特徴とする映像処理方法。
【請求項13】
前記プッシュプル方法は、前記アウトライアーの除去された前記入力深度映像を複数のブロックに分類し、前記ブロックの深度値平均を回帰的に算出して最終平均値を算出し、前記最終平均値を再び回帰的にトップダウン適用して前記アウトライアーの除去された前記入力深度映像のホールフィリングを行うことを特徴とする請求項12に記載の映像処理方法。
【請求項14】
前記アウトライアーを除去するステップは、前記入力深度映像の少なくとも一部領域に対する深度値平均を求め、前記深度値平均に予め指定されたレベル以上の偏差を有する値を単独に処理して前記入力深度映像のアウトライアーを除去することを特徴とする請求項12に記載の映像処理方法。
【請求項15】
前記ホールフィリング処理された深度映像にガウスフィルタリングを行うステップをさらに含むことを特徴とする請求項12に記載の映像処理方法。
【請求項16】
前記ホールフィリング処理された深度映像で隣接のピクセルをメッシュに構成してメッシュ基盤の3D幾何モデルを生成するステップをさらに含むことを特徴とする請求項12に記載の映像処理方法。
【請求項17】
前記3D幾何モデルに含まれた複数のメッシュに対してそれぞれの法線を算出するステップをさらに含むことを特徴とする請求項16に記載の映像処理方法。
【請求項18】
前記入力深度映像に関連する入力カラー映像のカラー値を前記3D幾何モデルに含まれた複数のメッシュに関連づけるテクスチャコーディネートステップをさらに含むことを特徴とする請求項17に記載の映像処理方法。
【請求項19】
前記3D幾何モデルに逆投影マトリックスを適用して前記入力深度映像に関連するカメラ視点におけるパースペクティブプロジェクションを除去するステップをさらに含むことを特徴とする請求項16に記載の映像処理方法。
【請求項20】
請求項12〜請求項19のいずれか一項に記載の映像処理方法を行うプログラムを収録したコンピュータで読み出し可能な記録媒体。
【請求項1】
入力深度映像のアウトライアーを除去するアウトライアー除去部と、
アウトライアーの除去された前記入力深度映像にプッシュプル方法によってホールフィリングを行ってホールフィリング処理された深度映像を生成するホールフィリング処理部と、
を備えることを特徴とする映像処理装置。
【請求項2】
前記プッシュプル方法は、前記アウトライアーの除去された前記入力深度映像を複数のブロックに分類し、前記ブロックの深度値平均を回帰的に算出して最終平均値を算出し、前記最終平均値を再び回帰的にトップダウン適用して前記アウトライアーの除去された前記入力深度映像のホールフィリングを行うことを特徴とする請求項1に記載の映像処理装置。
【請求項3】
前記アウトライアー除去部は、前記入力深度映像の少なくとも一部領域に対する深度値平均を求め、前記深度値平均に予め指定されたレベル以上の偏差を有する値を単独に処理して前記入力深度映像のアウトライアーを除去することを特徴とする請求項1に記載の映像処理装置。
【請求項4】
前記ホールフィリング処理された深度映像にガウスフィルタリングを行うフィルタ部をさらに備えることを特徴とする請求項1に記載の映像処理装置。
【請求項5】
前記ホールフィリング処理された深度映像で隣接のピクセルをメッシュに構成してメッシュ基盤の3D幾何モデルを生成するメッシュ生成部をさらに備えることを特徴とする請求項1に記載の映像処理装置。
【請求項6】
前記3D幾何モデルに含まれた複数のメッシュに対してそれぞれの法線を算出する法線算出部をさらに備えることを特徴とする請求項5に記載の映像処理装置。
【請求項7】
前記入力深度映像に関連する入力カラー映像のカラー値を前記3D幾何モデルに含まれた複数のメッシュに関連づけるテクスチャコーディネート部をさらに備えることを特徴とする請求項6に記載の映像処理装置。
【請求項8】
前記3D幾何モデルに逆投影マトリックスを適用して前記入力深度映像に関連するカメラ視点におけるパースペクティブプロジェクションを除去する逆投影演算部をさらに備えることを特徴とする請求項5に記載の映像処理装置。
【請求項9】
入力深度映像で互いに隣接する少なくとも3つのピクセル当たり1つずつのメッシュを生成して前記入力深度映像に関連する3D幾何モデルを生成するメッシュ生成部と、
前記3D幾何モデルに含まれたメッシュそれぞれの法線を算出する法線算出部と、
前記入力深度映像に関連する入力カラー映像から前記3D幾何モデルに含まれたメッシュそれぞれのテクスチャ情報を取得して前記入力深度映像及び前記入力カラー映像に対する3Dモデルを生成するテクスチャコーディネート部と、
を備えることを特徴とする映像処理装置。
【請求項10】
前記3Dモデルに対して前記入力深度映像または前記入力カラー映像のうち少なくとも1つに関連するカメラ視点によるパースペクティブプロジェクションを除去する逆投影演算部をさらに備えることを特徴とする請求項9に記載の映像処理装置。
【請求項11】
前記逆投影演算部は、前記3Dモデルに逆投影マトリックスを適用して前記パースペクティブプロジェクションを除去することを特徴とする請求項10に記載の映像処理装置。
【請求項12】
入力深度映像のアウトライアーを除去するステップと、
アウトライアーの除去された前記入力深度映像にプッシュプル方法を用いてホールフィリングを行ってホールフィリング処理された深度映像を生成するステップと、
を含むことを特徴とする映像処理方法。
【請求項13】
前記プッシュプル方法は、前記アウトライアーの除去された前記入力深度映像を複数のブロックに分類し、前記ブロックの深度値平均を回帰的に算出して最終平均値を算出し、前記最終平均値を再び回帰的にトップダウン適用して前記アウトライアーの除去された前記入力深度映像のホールフィリングを行うことを特徴とする請求項12に記載の映像処理方法。
【請求項14】
前記アウトライアーを除去するステップは、前記入力深度映像の少なくとも一部領域に対する深度値平均を求め、前記深度値平均に予め指定されたレベル以上の偏差を有する値を単独に処理して前記入力深度映像のアウトライアーを除去することを特徴とする請求項12に記載の映像処理方法。
【請求項15】
前記ホールフィリング処理された深度映像にガウスフィルタリングを行うステップをさらに含むことを特徴とする請求項12に記載の映像処理方法。
【請求項16】
前記ホールフィリング処理された深度映像で隣接のピクセルをメッシュに構成してメッシュ基盤の3D幾何モデルを生成するステップをさらに含むことを特徴とする請求項12に記載の映像処理方法。
【請求項17】
前記3D幾何モデルに含まれた複数のメッシュに対してそれぞれの法線を算出するステップをさらに含むことを特徴とする請求項16に記載の映像処理方法。
【請求項18】
前記入力深度映像に関連する入力カラー映像のカラー値を前記3D幾何モデルに含まれた複数のメッシュに関連づけるテクスチャコーディネートステップをさらに含むことを特徴とする請求項17に記載の映像処理方法。
【請求項19】
前記3D幾何モデルに逆投影マトリックスを適用して前記入力深度映像に関連するカメラ視点におけるパースペクティブプロジェクションを除去するステップをさらに含むことを特徴とする請求項16に記載の映像処理方法。
【請求項20】
請求項12〜請求項19のいずれか一項に記載の映像処理方法を行うプログラムを収録したコンピュータで読み出し可能な記録媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−97806(P2013−97806A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2012−240977(P2012−240977)
【出願日】平成24年10月31日(2012.10.31)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】Samsung Electronics Co.,Ltd.
【住所又は居所原語表記】129,Samsung−ro,Yeongtong−gu,Suwon−si,Gyeonggi−do,Republic of Korea
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成24年10月31日(2012.10.31)
【出願人】(390019839)三星電子株式会社 (8,520)
【氏名又は名称原語表記】Samsung Electronics Co.,Ltd.
【住所又は居所原語表記】129,Samsung−ro,Yeongtong−gu,Suwon−si,Gyeonggi−do,Republic of Korea
【Fターム(参考)】
[ Back to top ]