
曝気槽の監視方法
【課題】判断の基準となる内生呼吸の酸素消費速度を、汚泥の活性状態の変化を反映した無負荷状態の酸素消費速度として表示することにより、排水処理施設の管理者が曝気槽の処理状態、負荷状態、及び汚泥の活性状態の変化等を視覚的に把握できる曝気槽の監視方法を実現することを目的とする。
【解決手段】曝気槽2内における流れ方向に沿って、複数箇所の汚泥と排水の混合液のRrを測定し、曝気槽2内の汚泥の汚泥容量を測定し、測定したRr分布と汚泥の内生呼吸のRrを比較するとともに、測定した汚泥容量を所定値と比較することにより、汚泥による排水処理状況が適正かどうか判断し、判断した結果を外部に表示する曝気槽の監視方法。
【解決手段】曝気槽2内における流れ方向に沿って、複数箇所の汚泥と排水の混合液のRrを測定し、曝気槽2内の汚泥の汚泥容量を測定し、測定したRr分布と汚泥の内生呼吸のRrを比較するとともに、測定した汚泥容量を所定値と比較することにより、汚泥による排水処理状況が適正かどうか判断し、判断した結果を外部に表示する曝気槽の監視方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、排水処理施設において、下水道や工場などから排出される有機物を含んだ被処理水である排水を微生物によって酸化分解処理する主要処理工程である曝気槽の監視方法に関するものである。
【背景技術】
【0002】
従来、下水処理場や工場・事業所等での有機性排水処理は、微生物を使った活性汚泥法によりなされている。
【0003】
活性汚泥法は、活性汚泥中の好気性微生物(細菌、原生動物など)が排水中の有機物を代謝作用によって二酸化炭素と水に分解するものであり、処理効率が高く、経済的な排水の処理方法として広く普及している。しかし、汚泥中の微生物は様々な要因により有機物の分解特性が変化するため、連続的かつ安定的に排水処理を行うには適正な運転管理を行う必要がある。
【0004】
排水処理における管理対象項目としては、溶存酸素濃度(以下、DOと省略)、pH、酸化還元電位(以下、ORPと省略)、汚泥濃度(以下、MLSSと省略)が代表的であり、これら以外に、水温、流入水量、汚泥容量なども測定され。管理者はこれら複数の計測項目の変化を監視しながら排水処理が適正となるよう曝気風量やMLSS、流入負荷量、薬剤注入量などを調整し曝気槽を運転管理している。
【0005】
ところで、近年は企業や国・地方自治体等の社会的責任がクローズアップされてきており、排水処理においてもコスト削減のみならず、環境負荷低減のさらなる追及が求められている。例えば、公共下水処理分野では同時に測定した複数の管理対象項目に基づいて、最適な運転条件を数学モデルの数値計算によって推定し、曝気槽を自動管理する高度な計測制御技術や、ADSLや光ファイバー等の高速ブロードバンドサービスの普及によって、遠隔地の処理場を一箇所で集中管理する遠方監視技術の導入が進みつつある。しかし、このような計測制御・監視技術が食品工場等の事業系排水処理分野に適用されている例は少ない。その理由は次の3点である。
・事業系排水処理施設では高度な技術を導入する為のコストが捻出できない。
・公共下水処理に比べ工場の操業状況により流入負荷の変動が大きく、計測制御技術の適 用が技術的に困難。
・事業系排水処理施設の管理者は工場の操業状況や季節変動の影響など、長年培ってきた 経験と勘があり、装置による自動運転に対して心理的な抵抗がある。
【0006】
従って、事業系の中・大規模排水処理施設では、ほとんどの処理場において管理者を常時配置し、有人で運転管理が行われている。しかし、近年の少子高齢化の進行により、排水処理施設管理のノウハウが熟練管理者から若手管理者へ伝承されなくなってきているため、排水処理施設の管理に不慣れな管理者を支援するため、上記(1)〜(3)の課題を解決できる曝気槽の監視技術が求められている。
【0007】
そこで、排水処理の形式、制御の目的、処理場の規模、排水の性状等に応じて(1)溶存酸素濃度による監視、(2)酸素消費速度(以下、Rrと省略)による監視、(3)曝気槽の状態による監視、など各種の監視方法が提案・実施されている。以下、これらについて説明する。
(1)溶存酸素濃度による監視
曝気槽の溶存酸素濃度を連続計測して曝気槽の状態を表示する方法である。曝気槽の溶存酸素濃度は、曝気槽への酸素供給速度と曝気槽内の汚泥のRrの比を表しており、酸素供給速度が一定であれば、汚泥のRrにより増減する。また、Rrは負荷の有無大小により変化し、溶存酸素濃度もこれに合わせて変化するので、連続的に溶存酸素濃度の時間変化を計測することにより曝気槽の負荷状態を視覚的に把握することができる。しかし、このような溶存酸素濃度による曝気槽の監視技術は、曝気槽への酸素供給速度が常に一定であるという仮定に基づいており、この仮定が成り立たないと正しく曝気槽の状態を把握できない。曝気槽の酸素供給能力は総括酸素移動容量係数(以下、KLaと省略)で表されるが、この値は汚泥の濃度や散気管の目詰まり等の影響により変化し一定ではない。また、測定もかなりの手間と労力を要するため、曝気槽が稼動中にKLaを計測して補正することは困難である。
(2)Rrによる監視
汚泥のRrを直接測定する方法である。この方法は、汚泥のRrと負荷量に相関があることを利用しており、Rrの計測値から負荷量を推定して表示するものである。この方法によればKLaの変動の影響を除外して、曝気槽に流入する負荷の変化を得ることができる。
しかし、この方法ではRrの良否を判断する基準が明確でない為、相対的な負荷の大小を知るに留まり、曝気槽の状態を判断することまではできない。
(3)曝気槽の状態による監視
曝気槽の流下方向に沿って複数箇所のRrから曝気槽の処理状態を判断して表示する曝気槽の監視方法が提案されている(例えば特許文献1、2参照)。
この方法では、負荷が連続的に流入、流出する押し出し流れ型の活性汚泥法において、Rrは上流から下流にかけて減少していく分布を示すことを利用し、曝気槽における流下方向のRrの分布を測定し、予め設定した標準のRrの分布と計測したRrの分布を表示して比較することにより曝気槽の状態の良否を判断するものである。
【特許文献1】特開昭61−8662号公報
【特許文献2】特開昭63−156596号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上記従来の特許文献1及び2に記載の方法は、あらかじめ設定した標準のRrの分布との比較という方法で曝気槽の状態を表示し、かつ判断するものであるが、汚泥のRrは負荷以外にも水温変化や流入負荷の性状により変化するため、標準のRrの分布を一義的に定義できず、曝気槽の状態を正しく判断し、表示するのは困難であるという課題があった。
【0009】
そこで本発明は、判断の基準となる内生呼吸の酸素消費速度を、汚泥の活性状態の変化を反映した無負荷状態の酸素消費速度として表示することにより、排水処理施設の管理者が曝気槽の処理状態、負荷状態、及び汚泥の活性状態の変化等を視覚的に把握できる曝気槽の監視方法を実現することを目的とする。
【0010】
さらに、曝気槽の状態を判断して表示することにより、不慣れな管理者でも曝気槽の状態を適切に把握することができる曝気槽の監視方法を実現することを目的とする。
【課題を解決するための手段】
【0011】
上記従来の課題を解決するために、本発明の曝気槽の監視方法は、曝気槽内における流れ方向に沿って、複数箇所の汚泥と排水の混合液のRrを測定し、曝気槽内の汚泥の汚泥容量を測定し、測定したRr分布と汚泥の内生呼吸のRrを比較するとともに、測定した汚泥容量を所定値と比較することにより、汚泥による排水処理状況が適正かどうか判断し、判断した結果を外部に表示するものである。
【発明の効果】
【0012】
本発明により、判断の基準となる内生呼吸の酸素消費速度を、汚泥の活性状態の変化を反映した無負荷状態の酸素消費速度として表示することにより、排水処理施設の管理者が曝気槽の処理状態、負荷状態、及び汚泥の活性状態の変化等を視覚的に把握できる曝気槽の監視方法が得られる。
【0013】
さらに、汚泥の活性状態の変化を反映した基準により曝気槽の状態を判断して表示でき、不慣れな管理者でも曝気槽の状態を適切に把握することができる曝気槽の監視方法が得られる。
【発明を実施するための最良の形態】
【0014】
本発明の第1の実施の形態による曝気槽の監視方法は、曝気槽内における流れ方向に沿って、複数箇所の汚泥と排水の混合液の酸素消費速度分布を測定し、曝気槽内の汚泥の汚泥容量を測定し、測定した酸素消費速度分布と汚泥の内生呼吸の酸素消費速度を比較するとともに、測定した汚泥容量を所定値と比較することにより、汚泥による排水処理状況が適正かどうか判断し、判断した結果を外部に表示するものである。
【0015】
本実施の形態によれば、酸素消費速度分布と内生呼吸の酸素消費速度の比較だけではなく、汚泥容量を所定値と比較することで、酸素消費速度分布と内生呼吸の比較だけによるよりも、より正確な排水処理状況の監視を実現することができる。
【0016】
本発明の第2の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、内生呼吸の酸素消費速度は、無負荷状態における混合液の酸素消費速度の測定値とするものである。
【0017】
本実施の形態によれば、内生呼吸の酸素消費速度を曝気槽内の混合液から直接測定することにより、より正確な内生呼吸の酸素消費速度を得ることができる。
【0018】
本発明の第3の実施の形態による曝気槽の監視方法は、第2の実施の形態による曝気槽の監視方法において、無負荷状態は、曝気槽へ流入する負荷がない状態とするものである。
【0019】
本実施の形態によれば、曝気槽に負荷が無い日や時間が予め特定できる場合などにおいて、容易に無負荷状態と判別でき内生呼吸の酸素消費速度を得ることができる。
【0020】
本発明の第4の実施の形態による曝気槽の監視方法は、第2の実施の形態による曝気槽の監視方法において、無負荷状態は、曝気槽の流れ方向に沿って複数箇所で測定した酸素消費速度分布の傾きが水平の状態とするものである。
【0021】
本実施の形態によれば、曝気槽の負荷が無い状態であることを酸素消費速度の分布の傾きから判断できるようになり、曝気槽の負荷が流入しない日や時間を予め特定することが不要となる。
【0022】
本発明の第5の実施の形態による曝気槽の監視方法は、第2の実施の形態による曝気槽の監視方法において、無負荷状態は、曝気槽の流れ方向の最下流部から混合液を採取し、採取した混合液を曝気して残留負荷を全て消費させた状態とするものである。
【0023】
本実施の形態によれば、最も残留負荷が低い最下流部の混合液を強制的に無負荷の状態にすることにより、曝気槽が必ずしも適当な頻度で無負荷の状態にならないような場合においても、確実に内生呼吸の酸素消費速度を得ることができる。
【0024】
本発明の第6の実施の形態による曝気槽の監視方法は、第5の実施の形態による曝気槽の監視方法において、採取した混合液は、曝気する前に上澄みと懸濁物に分離し、上澄みを負荷のない清水で置換するものである。
【0025】
本実施の形態によれば、混合液中に残留した負荷を強制的に取り除くことにより、無負荷状態にするための曝気時間を大幅に短縮することができる。
【0026】
本発明の第7の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、測定した酸素消費速度が内生呼吸の酸素消費速度より低いとき、測定した酸素消費速度を内生呼吸の酸素消費速度とするものである。
【0027】
本実施の形態によれば、微生物の活性度が下がり、測定した酸素消費速度が内生呼吸の酸素消費速度以下となった場合でも、測定した酸素消費速度を内生呼吸の酸素消費速度とすることにより、曝気槽が無負荷の状態にならない場合においても、活性度の変化に追従し、内生呼吸の酸素消費速度を得ることができる。
【0028】
本発明の第8の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、汚泥容量は、曝気槽の流れ方向の最下流部で測定した汚泥容量とするものである。
【0029】
本実施の形態によれば、曝気槽から沈殿槽へ流出する直前の汚泥の汚泥容量に基づいて、排水処理が適正かどうかを判断することができるため、沈殿槽における汚泥と処理水の沈降分離性を正確に把握することが可能となる。
【0030】
本発明の第9の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、曝気槽の流れ方向の最下流部で測定した酸素消費速度が内生呼吸よりも大きく、かつ、汚泥容量が所定値よりも大きい場合に、汚泥による排水処理が不足している、と判断するものである。
【0031】
本実施の形態によれば、内生呼吸遷移点は曝気槽内部に無く、かつ、沈殿槽において汚泥と処理水の沈降分離が不可能になりつつある状態、すなわち排水処理として問題となりつつある状態を把握することが可能となる。
【0032】
本発明の第10の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、曝気槽の流れ方向の最下流部で測定した酸素消費速度が内生呼吸よりも大きく、かつ、汚泥容量が所定値よりも小さい場合に、汚泥による排水処理が適正である、と判断するものである。
【0033】
本実施の形態によれば、内生呼吸遷移点は曝気槽内に無いが、沈殿槽において汚泥と処理水の沈降分離が可能な状態、すなわち排水処理として適正な状態を把握することが可能となる。
【0034】
本発明の第11の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、曝気槽の流れ方向の最下流部で測定した酸素消費速度が内生呼吸の酸素消費速度より低く、かつ、汚泥容量が所定値よりも小さい場合に、測定した酸素消費速度を内生呼吸の酸素消費速度とし、汚泥による排水処理が過剰である、と判断するものである。
【0035】
本実施の形態によれば、活性汚泥の水温変化、排水の水質変化等により内生呼吸が変動する場合においても、曝気槽における排水処理の過不足を精度よく検出することが可能となる。
【0036】
本発明の第12の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、曝気槽の流れ方向の最下流部で測定した酸素消費速度が内生呼吸の酸素消費速度と等しく、かつ、汚泥容量が所定値よりも小さい場合に、汚泥による排水処理が過剰である、と判断するものである。
【0037】
本実施の形態によれば、内生呼吸遷移点は曝気槽内の最下流部にあるが、沈殿槽において汚泥と処理水の沈降分離が可能な状態、すなわち排水処理として適正な状態を把握することが可能となる。
【0038】
本発明の第13の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、汚泥による排水処理が適正かどうかの判断は、酸素消費速度と同時にMLSSを測定して酸素利用速度係数を算出し、酸素利用速度係数を酸素利用速度の代わりに用いて行うものである。
【0039】
本実施の形態によれば、汚泥の濃度変化による酸素消費速度の影響を除去でき、単に酸素消費速度のみを測定するよりも正確に微生物の活性による酸素消費速度を求めることが可能となる。
【0040】
本発明の第14の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、汚泥による排水処理が適正かどうかの判断は、汚泥容量と同時にMLSSを測定して汚泥容量指標を算出し、汚泥容量指標を汚泥容量の代わりに用いて行うものである。
【0041】
本実施の形態によれば、汚泥の濃度変化による汚泥容量の影響を除去でき、単に汚泥容量のみを測定するよりも正確に汚泥と処理水の沈降分離性を把握することが可能となる。
【0042】
本発明の第15の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、排水の処理状況を文字で表示するものである。
【0043】
本実施の形態によれば、施設の管理者が曝気槽の状態が適正かどうか容易に確認することができる。
【0044】
本発明の第16の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、排水の処理状況を図で表示するものである。
【0045】
本実施の形態によれば、施設の管理者が曝気槽の状態が適正かどうか容易に確認することができる。
【0046】
以下、本発明の実施例における曝気槽の監視方法について、図面を参照して説明する。
【0047】
(実施の形態1)
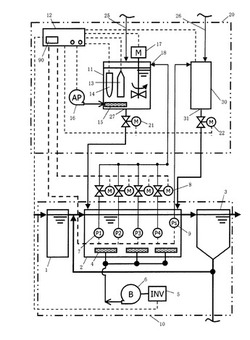
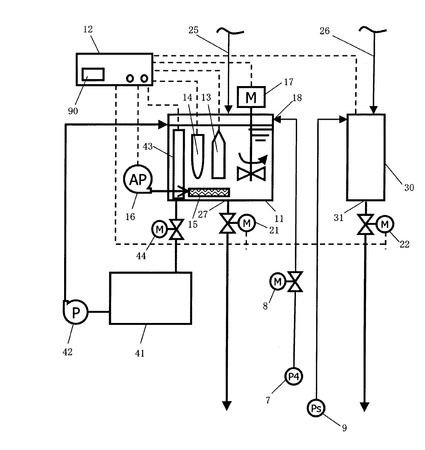
図1は本実施の形態における曝気槽の制御方法の一例を示すシステム図で、制御対象を含んだ排水処理系10と計測制御系20を示している。
【0048】
■排水処理系10の構成と動作
排水処理系10は排水を一時的に貯留する調整槽1と、排水と活性汚泥の混合液を曝気することにより、微生物によって排水中の有機物を酸化分解する曝気槽2と、曝気槽2で処理された混合液を重力によって活性汚泥と処理水とに沈降分離する沈殿槽3で構成されている。ここで、矢印は排水及び混合液の流れの方向を表している。
【0049】
処理対象の有機物を含んだ排水は調整槽1に流入して貯留され、ここである程度の負荷変動は平均化されほぼ一定の流量・負荷となって曝気槽2へと送られる。
【0050】
曝気槽2では排水と汚泥が混合され混合液となると共に曝気ブロア6から空気が散気管4を介して送り込まれ、散気管4から発生した有酸素気泡が酸素を混合液中に供給すると共に混合液を撹拌する。
【0051】
曝気槽2内部では、微生物が酸素を消費しながら有機物を体内に取り込み、続いて有機物を酸化分解して水と二酸化炭素に分解する。微生物による有機物の酸化分解は曝気槽2の最上流部から最下流部へ流れるにつれて進行し、混合液は沈殿槽3へと流入する。
【0052】
沈殿槽3に送り込まれた混合液は重力により汚泥と上澄み液に沈降分離され、上澄み液は処理水として系外へと放流される。沈降分離された汚泥の一部は返送汚泥として曝気槽2の上流部へ戻され生物処理に再利用される。
【0053】
■計測制御系20の構成と動作
計測制御系20は内部にRr計測槽11と汚泥容量(SV)計測槽30と制御部12と制御部12に表示部90とを有している。
【0054】
Rr計測槽11はDOセンサー13、温度センサー14、計測槽散気管15、撹拌機17を備え、計測槽散気管15は空気配管によってエアーポンプ16に接続されている。
【0055】
曝気槽2にはRrサンプリングポンプ7が流れ方向に沿って最上流部と最下流部を含む複数箇所に配置されており、Rrサンプリングポンプ7は混合液採取弁8を介してRr計測槽11の流入口18に接続されている。Rr計測槽11の底部にはRr計測槽流出口27があり、Rr計測槽流出口27はRr計測槽排出弁21を介して曝気槽2の最上流部近傍に接続されている。更に、曝気槽2の最下流部にはSVサンプリングポンプ9が配置されており、SV計測槽30へ混合液を供給するようになっている。SV計測槽30の底部にはSV計測槽流出口31があり、SV計測槽流出口31はSV計測槽排出弁22を介して、曝気槽最下流部に接続されている。
【0056】
制御部12はエアーポンプ16、撹拌機17、インバーター5、Rrサンプリングポンプ7、SVサンプリングポンプ9、Rr計測槽排出弁21、SV計測槽排出弁22と電気的に接続されており(図中、破線で示す)、各機器の運転制御が可能となっている。また、DOセンサー13および温度センサー14の測定信号線(図中、破線で示す)はそれぞれ制御部12に接続されており、測定信号を制御部12へ取り込むことが可能となっている。また、計測データや判断結果は表示部90に文字や図で表示することが可能となっている。尚、図1において、Rrサンプリングポンプ7、混合液採取弁8、Rr計測槽排出弁21、SV計測槽排出弁22の信号線は便宜上1本の破線で示しているが、各機器は個別に制御できるようになっている。
【0057】
なお、Rr計測槽11、SV計測槽30にはセンサー類の洗浄用として、Rr洗浄配管25、SV洗浄配管26が接続されており、水道水や地下水等の清澄な水が供給されるようになっている。
【0058】
まず、酸素消費速度の測定は次のように行う。Rrサンプリングポンプ7のうち1台を作動させ、作動させたRrサンプリングポンプ7に対応した混合液採取弁8を開き(通常、混合液採取弁8は閉じた状態である)、混合液を流入口18からRr計測槽11へ流入させ、混合液をRr計測槽11に一定量貯留する。次に、エアーポンプ16と撹拌機17を作動させ、計測槽散気管15によってRr計測槽11内の混合液を曝気すると同時に、DOセンサー13、温度センサー14による測定も開始する。測定開始後、制御部12へDOセンサー13、温度センサー14の測定値が一定時間ごとに逐次記録され、Rr計測槽11内の混合液のDOが曝気により上昇し、一定となったところで撹拌機17は作動させつつ、エアーポンプ16の作動を停止することにより、Rr計測槽11内の混合液の酸素消費速度をDOの減少曲線から算出する。なお、酸素消費速度は水温による変化が大きいため、制御部12にて温度の変化分を補償することにより、温度の影響を排除することが出来る。
【0059】
DOがほぼ0になったらDOセンサー13、温度センサー14による測定を停止し、Rr計測槽排出弁21を開いて、Rr計測槽11内部の混合液をRr計測槽流出口27より曝気槽2へ返送する。ここで、曝気槽2に返送する位置は処理水への影響を考慮し曝気槽2の最上流部であることが望ましい。混合液を曝気槽2へ返送した後は、Rr洗浄配管25より、水道水や地下水などの洗浄水をRr計測槽11へ流入させ、計測槽散気管15及び撹拌機17を作動させて、DOセンサー13、温度センサー14、Rr計測槽11の洗浄を行うことが望ましい。
【0060】
上記のようにして酸素消費速度を測定するが、この測定を曝気槽2の最上流部から最下流部まで順次に測定していくことにより、曝気槽2内の酸素利用速度分布を得ることが可能となる。
【0061】
次に、汚泥容量の測定は次のように行う。SVサンプリングポンプ9を作動させ、曝気槽2最下流部の混合液をSV計測槽30へ流入させ、汚泥容量を測定し、測定値は制御部12へと送られる。測定終了後、SV計測槽排出弁22を開いて、SV計測槽30内部の混合液をSV計測槽流出口31より曝気槽2へ返送する。混合液を曝気槽2へ返送した後は、SV洗浄配管26より、水道水や地下水などの洗浄水をSV計測槽30へ流入させ、SV計測槽30の洗浄を行うことが望ましい。
【0062】
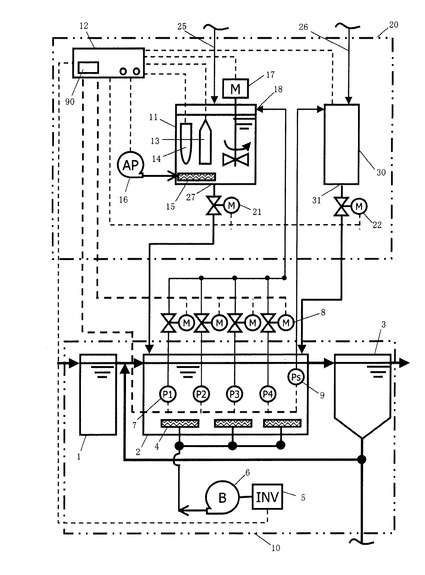
以上が排水処理系10および計測制御系20の構成と動作であるが、ここで、曝気槽2内部での排水の処理状況について図2を用いてさらに詳しく説明する。
【0063】
曝気槽2内部に流入した排水は曝気槽2の最上流部で汚泥と混合され、汚泥中の微生物は、負荷である排水中の有機物を急速に体内に取り込む。この際、微生物は多量に酸素を消費するため酸素消費速度は最上流部で最も高い値を示したあと急激に低下する(図中のA部)。
【0064】
混合液が曝気槽2を流下するにつれて、微生物は体内に取り込んだ有機物を徐々に酸化分解するため、酸素消費速度は下流に行くに従い徐々に低下する。そして、微生物が体内に取り込んだ有機物を全て分解すると、有機物の消費を伴わない呼吸、いわゆる内生呼吸状態となり、酸素消費速度は一定となる。
【0065】
ここで、曝気槽2の状況は大きく(1)処理過剰A、(2)処理過剰B、(3)最適処理、(4)処理不足の4つに分類することができ、(1)〜(4)の各状況を判断する上でのポイントは有機物を分解する呼吸が内生呼吸に遷移する位置(内生呼吸遷移点)が「曝気槽2内のどの位置にあるか」と、「沈殿槽3において処理水と活性汚泥の沈降分離を良好に行えるかどうか」である。次に(1)〜(4)の各状況の判断方法を説明する。
(1)処理過剰A
図2中でbに示すように、内生呼吸遷移点が曝気槽2の最下流部より上流側となり、かつ沈殿槽3において処理水と活性汚泥の沈降分離が良好に行える場合は、内生呼吸遷移点より下流側の汚泥は酸化分解処理を行っていないことになり、流入負荷に対して曝気等の処理が過剰であると判断できる。
(2)処理過剰B
図2中でfに示すように、内生呼吸遷移点が曝気槽2の最下流部にあり、かつ沈殿槽3において処理水と活性汚泥の沈降分離が良好に行える場合は、曝気槽2内で汚泥による酸化分解処理は終わっていないが、排水処理としては余裕があることになり、流入負荷に対して曝気等の処理が過剰であると判断できる。
(3)最適処理
図2中でaに示すように、内生呼吸遷移点が曝気槽2の最下流部より後ろ、すなわち曝気槽2内で内生呼吸遷移点に到達しない場合は、曝気槽2の最下流部でも微生物の体内に有機物が残留している事になる。しかし、沈殿槽3において処理水と活性汚泥の沈降分離が良好に行えるのであれば、流入負荷に対して曝気等の処理は過不足なく、排水処理としては最も効率が良い状況であると判断できる。
(4)処理不足
図2中でcに示すように、内生呼吸遷移点が曝気槽2の最下流部より後ろ、すなわち曝気槽2内で内生呼吸遷移点に到達せず、かつ沈殿槽3において処理水と活性汚泥の沈降分離が行えない状況であれば、排水処理として処理が不足している状況であると判断できる。
【0066】
活性汚泥は曝気を過剰に行って、処理過剰が進行すると菌体外物質の生産不足による汚泥の沈降性の悪化などが生じる恐れがあり、一方、処理不足が進行しても、菌体内に有機物が残存して蓄積し、微生物の有機物の吸収能力が低下し、汚泥の沈降分離性が悪化する。つまり、曝気槽2の運転状況を最適に制御するためには、内生呼吸遷移点が曝気槽内部に無い場合でも、沈殿槽において汚泥と処理水の沈降分離が可能な状態を判断し、表示することが最大のポイントである。
【0067】
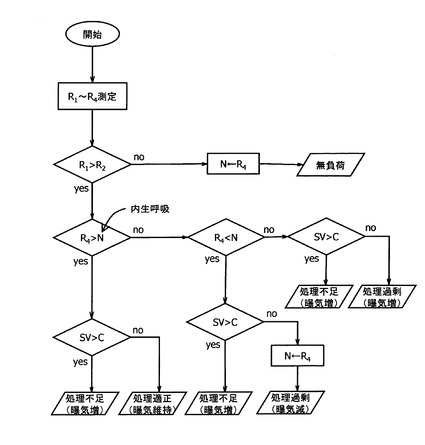
次に本実施の形態における曝気槽の監視方法について図3のフローチャートを用いて説明する。
【0068】
図3においてR1〜R4はRr計測槽11で測定された曝気槽2における流れ方向の酸素消費速度を表し、R1が最上流部における値を、R4が最下流部における値を表す。Nは測定時点の内生呼吸の酸素消費速度を表す。
【0069】
まずR1〜R4を測定する。
【0070】
次に、R1とR2を比較し、R1>R2であれば、曝気槽に流入する負荷があると判断する。一方、R1>R2でなければ、R1=R2=R3=R4とみなすことができ、曝気槽2内で酸素消費速度分布の傾きは無く、曝気槽2は無負荷すなわち内生呼吸状況と判断できるため、R4を内生呼吸の値としてNを更新する。
【0071】
次に負荷があると判断した場合は、現在の内生呼吸の酸素消費速度NとR4を比較し、R4>Nであれば、最下流部の酸素消費速度が内生呼吸の酸素消費速度より大きいことになり、さらにSV>Cであれば、汚泥の沈降性も悪化しつつあるため、処理が不足していると判断でき、曝気風量を増加するよう制御する。一方、R4>NかつSV<Cであれば、流入負荷に対して曝気等の処理は過不足なく、処理は適正と判断できる。尚、Cは所定値としてあらかじめ入力する値であるが、SV30で50%以下とするのが望ましい。Cを大きく設定し過ぎると、汚泥の沈降分離性の悪化が止まらなくなり、汚泥のキャリーオーバーによる環境汚染を引き起こす場合があるので注意が必要である。
【0072】
次に、R4<NかつSV<Cの場合は、水温の変化や排水の水質変化等により、汚泥の活性度が低下したことによる影響と判断でき、R4の値を強制的に内生呼吸の酸素消費速度としてNを更新し、かつ処理が過剰と判断できる。一方、R4<NかつSV>Cの場合は、何らかの原因によって汚泥の活性度が低下し、かつ汚泥の沈降分離性も悪化しつつある状態のため、安全のため処理不足と判断する。
【0073】
次に、R4>NでもなくR4<Nでもない状態、つまりR4=NかつSV<Cの場合は、曝気槽2の最下流部で汚泥の活性度は内生呼吸となっており、かつ汚泥の沈降分離性も良好であるため、処理過剰と判断する。一方、R4=NかつSV>Cの場合は、曝気槽2の最下流部で汚泥の活性度は内生呼吸となっているが、何らかの原因で汚泥の沈降分離性が悪化しつつある状態のため、安全のため処理不足と判断する。
【0074】
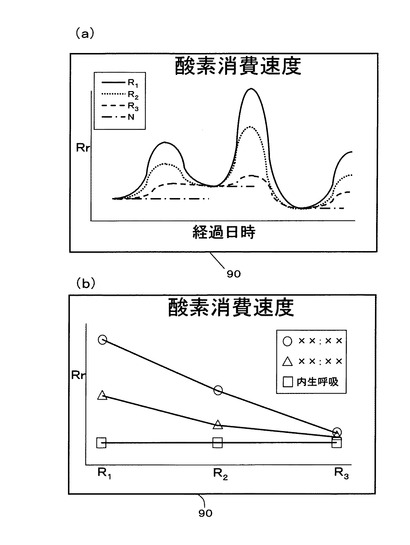
ここで、流下方向における4箇所の酸素消費速度及び内生呼吸の酸素消費速度が得られたので、表示部90にこの結果を表示する。表示部90への表示方法の一例として、図4(a)のように横軸に経過日時、縦軸に各酸素消費速度の測定値及び内生呼吸の酸素消費速度を表示すれば、管理者は内生呼吸の酸素消費速度という基準を目安に、曝気槽2の負荷の有無や内生呼吸の酸素消費速度の変化を視覚的に捉えることができる。また、別の表示方法として、図4(b)のように横軸に曝気槽2の位置をとり、現在の内生呼吸の酸素消費速度と測定時間毎の酸素消費速度の分布を表示することにより、曝気槽2の処理状態をより詳細に把握することもできる。
【0075】
このように、判断の基準を汚泥の活性状態の変化を反映した無負荷状態での酸素消費速度とすることにより、曝気槽2の状態を適切に表示することができる。
【0076】
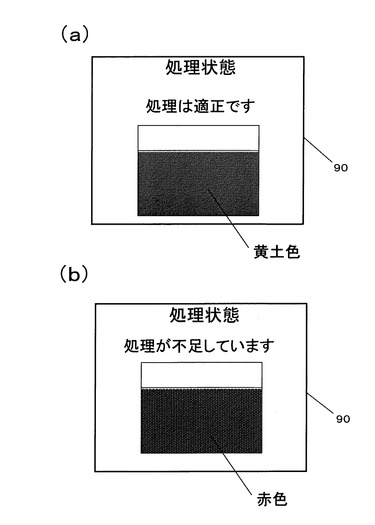
次に、判断結果を管理者が曝気槽2の状態を把握できるように表示部90に表示する。処理状態の判断結果の表示方法としては図5で示した酸素消費速度の経時変化を示すグラフや横軸に曝気槽2の位置を示すグラフを表示し、同時に、現在の処理状況を「処理は適正です」、「処理が過剰です」、「処理が不足しています」のように文字で表示するとわかりやすい。また、図5に示すように、曝気槽2の絵を表示し、例えば(a)のように処理適正の時は曝気槽2の中の汚泥の色が標準的な汚泥の色を示す黄土色を、処理不足のときは(b)のように黒色に近い色にするなど、その状況によって色や絵を変化させるようにすれば、管理者が曝気槽2の状態をより理解しやすい。
【0077】
このように、曝気槽2の状態をグラフにより視覚的に表示するだけでなく、処理状態の判断まで行って結果を表示することにより、熟練した管理者を支援するだけでなく不慣れな管理者でも曝気槽2の状態を適切に把握することができる。
【0078】
ここで、従来の曝気槽の監視方法では酸素消費速度の分布の傾きが変わる変曲点で内生呼吸遷移点の位置が適正かどうか判断するが、あらかじめ事前に調査測定した最適な酸素消費速度の分布との比較を用いる方法によっているため、汚泥の活性が変化した場合は最適な酸素消費速度の分布が変化するので、例えば図2におけるaが変化することになるので、内生呼吸遷移点が適正な位置にあるかどうかの判断を誤る。
【0079】
しかし上記のように、本実施の形態では内生呼吸遷移点が適正な位置にあるかどうかの判断を内生呼吸の酸素消費速度の値と比較しており、内生呼吸の酸素消費速度を常に曝気槽2の混合液を用いて更新することができるため、活性度が変化した場合でも内生呼吸遷移点が適正な位置にあるかどうかの判断を正しく行うことができる。かつ、内生呼吸遷移点が曝気槽2内部に無い場合でも、沈殿槽3において汚泥と処理水の沈降分離が可能な状態を判断し、良好な処理水質を維持しつつ、正確な曝気槽の監視方法を実現することができる。
【0080】
尚、本実施の形態では測定位置を4箇所で説明したが、測定箇所数は処理場の設置状況や処理の要求精度、コスト等により決定すればよく、設置箇所が多い方が緻密な制御が行えるがその分コストが上昇する。
【0081】
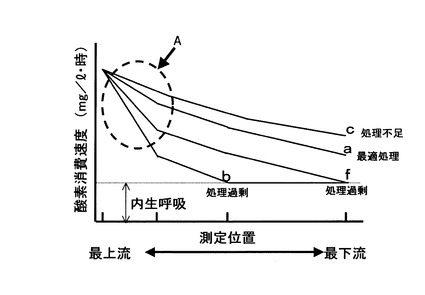
次に、ある事業所の排水処理施設における酸素消費速度分布について説明する。
【0082】
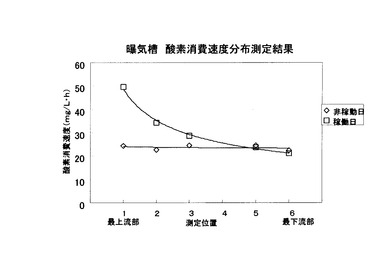
図6は、ある事業所の排水処理施設における酸素消費速度の流れ方向の分布を表している。
【0083】
ここでは、事業所が稼動している日と非稼動日において計測を行い、非稼働日は流入負荷が0であった。
【0084】
図6にあるように稼働日における酸素消費速度は曝気槽2の最上流部が非常に高い値を示し、下流に行くに従い急激に低下し、最下流部の手前でほぼ一定の状況となった。ここではR1>R2であるので稼働日に負荷があることが図から判断できる。
【0085】
また、流入負荷が0の非稼働日における酸素消費速度は、曝気槽の位置によらず一定であり、R1≒R2≒R3≒R4であるので無負荷状態であることが判断でき、この値は内生呼吸の酸素消費速度Nとなる。
【0086】
このNを稼働日の酸素消費速度の分布と比較することにより、内生呼吸遷移点は図4の5の位置であることがわかり、稼働日においては曝気過剰であり曝気量を低減することにより省エネルギーが実現できることがわかった。このように、本発明の曝気槽の監視方法は実際の処理施設に適用可能である。
【0087】
以上のように、本実施の形態によれば、活性汚泥が最適な状況となるように曝気槽を監視し、制御することができるようになり、事業所等での繁忙期や休日、夜間など、負荷量が急激に変動するような場合でも従来のように安全を見て曝気過多で運転する必要が無くなり省エネルギーが図れると同時に、急な負荷の変動に対応するための管理者を常時配置させる必要が無くなり、管理コストの低減にも寄与できる。
【0088】
尚、本実施の形態では酸素消費速度で内生呼吸遷移点を特定する方法で説明したが、通常、曝気槽は汚泥濃度を一定に保つように運転されているのでこの方法で問題は無い。
【0089】
しかし、より正確な検知を行うには計測槽に汚泥濃度計を設置し、酸素消費速度を汚泥濃度で除した単位汚泥重量あたりの酸素消費速度いわゆる酸素利用速度係数(Kr)を用いる方がより正確に内生呼吸遷移点を特定できる。また、汚泥容量についても、汚泥容量を汚泥濃度で除した汚泥容量指標(汚泥の占める容積)を用いる方がより正確に汚泥の沈降分離性を判断することができる。一般に汚泥容量指標は300mg/l以下とするのが望ましい。
【0090】
尚、本実施の形態において、制御対象を曝気風量として説明したが、曝気槽2の制御対象は曝気風量に限定されるものではなく、曝気槽2内の返送汚泥量や、負荷の流入量などを制御対象としてもよい。
【0091】
また、酸素消費速度の測定を別槽のRr計測槽11を用いて測定する方法で説明したが、酸素消費速度の測定方法は曝気槽2内で直接測定する方法を用いてもよい。
【0092】
また、本実施の形態では、無負荷状態の判別を曝気槽2の酸素消費速度の分布の傾きが水平であることで判断すると説明したが、例えば曝気槽2に負荷が流入しない日や時間があらかじめわかっており特定できる場合などにおいては、酸素消費速度の分布の傾きを調べる必要が無く、無負荷状態になる時間の酸素消費速度を内生呼吸の酸素消費速度とすればよい。
【0093】
以上のように、本実施の形態によれば、負荷の変動幅が大きく、急激に変化する事業所等の排水処理施設の曝気槽などにも適用でき、汚泥の活性度の変化にも対応可能な曝気槽の監視方法が得られる。
【0094】
(実施の形態2)
図7は、本発明の曝気槽の制御方法における他の実施形態を示している。なお、実施の形態1と同様の構成や作用を有するものについては同一符号を付し、その説明を省略する。
【0095】
本実施の形態は、実施の形態1のうち無負荷状態における内生呼吸の酸素消費速度を測定する方法として、曝気槽2の流入負荷が無い日に測定するのではなく、無負荷状態を強制的に作り出す方法としたものである。
【0096】
実施の形態1においては、非稼働日や夜間などの無負荷状態が適当な頻度で現れる場合を想定しているが、事業所によっては無負荷状態が長期間得られない場合や、全く得られない場合も考えられる。
【0097】
このような場合は内生呼吸の酸素消費速度が更新できなくなり汚泥の活性度の変化による影響に追随できなくなり内生呼吸遷移点を正確に特定できなくなる。このような場合に対処するため、本実施の形態は強制的に無負荷状態を作り出し、内生呼吸の酸素消費速度を測定するものである。
【0098】
図7において、Rr計測槽11には汚泥界面計43が設置されており、汚泥界面計43の信号線は制御部12に接続されている。計測槽の下方には汚泥受槽41が設置され、Rr計測槽11の底部と配管で接続されており、配管の途中には汚泥受槽流入弁44が設置されている。また、汚泥受槽41の底部とRr計測槽の上部は配管で接続されており、配管の途中には循環ポンプ42が配置されている。
【0099】
次に本実施の形態の処理動作について説明する。
【0100】
内生呼吸の酸素消費速度を測定する場合、最も残留負荷が低いと考えられる最下流部の位置のRrサンプリングポンプ7を動作させ、そのポンプの混合液採取弁8を開いて混合液を流入口18からRr計測槽11へ流入させる。
【0101】
混合液はRr計測槽11に一定量貯留されたのち、一定時間静止させることにより重力沈降により汚泥と上澄み液に分離される。
【0102】
ここで、汚泥界面計43の信号から測定値が安定したことを判断した段階で汚泥界面計43の値がRr計測槽11の底面と一致するまで汚泥を汚泥受槽41に排出する。
【0103】
残りの上澄み液はRr計測槽流出口27から曝気槽2へ返送する。
【0104】
ここで、汚泥受槽41の汚泥は循環ポンプ42でRr計測槽11にもどし、次にRr洗浄配管25からRr計測槽11に元の混合液の量と等量となるように水道水・地下水等を供給する。次に、エアーポンプ16と撹拌機17を作動させ、計測槽散気管15によってRr計測槽11内の混合液を曝気すると同時に、DOセンサー13、温度センサー14による測定も開始する。測定開始後、制御部12へDOセンサー13、温度センサー14の測定値が一定時間ごとに逐次記録され、Rr計測槽11内の混合液のDOが曝気により上昇し、一定となったところで撹拌機17は作動させつつ、エアーポンプ16の作動を停止することにより、Rr計測槽11内の混合液の酸素消費速度をDOの減少曲線から算出する。
【0105】
ここで、上澄みを水道水や地下水等で置換せず、採取した混合液を連続曝気するだけでも無負荷状態にすることができるが、微生物による負荷の消費には長時間を要する場合もあり、上澄みを水道水や地下水等で置換することにより混合液の残留負荷を大幅に低減できるので安定段階までの曝気時間を短縮することが可能となる。
【0106】
尚、水道水や地下水は排水処理系の処理水を利用することもできるが、測定の安定性や処理水の悪化の影響を考慮すると排水処理系とは別の水道水や地下水を用いることが望ましい。
【0107】
このようにして、内生呼吸の酸素消費速度を定期的に更新し、実施の形態1と同様にして、この値を酸素消費速度の分布と比較して内生呼吸遷移点が適正な位置かどうか判断する。
【0108】
以上のように、本実施の形態によれば、負荷が常に高く、適切な頻度で無負荷状態が得られない場合であっても強制的に無負荷状態を作り出すことにより内生呼吸の酸素消費速度を得ることが出来、広く適用可能な曝気槽の制御方法が得られる。
【0109】
(実施の形態3)
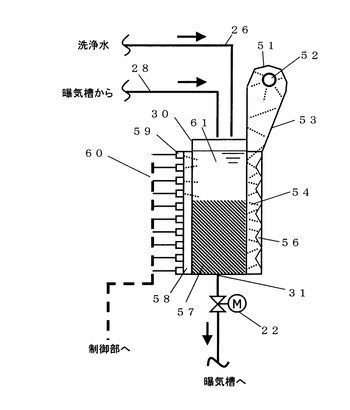
汚泥容量を測定するSV計測槽30は下水試験法に従い容積1リットルで内径約65mmの円筒状の容器で構成されている。SV計測槽30の一方には発光部54が、発光部54に対向する他方には光センサー59が配置されている。
【0110】
光源52は第1の集光手段51内に配置されており、第1の集光手段51は導光手段53へ接続され、導光手段53は発光部54へと接続されている。発光部54には乱反射層56が備えてあり、導光手段53内はアクリル等の導光材料が充填されており、発光部54の発光面はSV計測槽30へ密着するようになっている。
【0111】
光センサー59はSV計測槽30へ密着するように配置された第2の集光手段58へ密着するように配置されている。光センサー59はSV計測槽30の深さ方向へ直列に複数個並べられており、光センサーの信号線60によって制御部12へと接続されている。ここで、光センサー59はフォトトランジスタ、フォトダイオード、フォトICなどである。
【0112】
また、第1の集光手段51はステンレスやメッキを施した鉄板や鏡など、光を反射する材質である。SV計測槽30の上部には曝気槽等から汚泥混合液を導入してくる汚泥混合液導入管28とSV計測槽30内を洗浄するためのSV洗浄配管26が備えてあり、SV計測槽30の下部には測定後に汚泥混合液を排出するためのSV計測槽流出口31と、SV計測槽流出口31に接続する汚泥混合液排出管28およびSV計測槽排出弁22が備えられている。
【0113】
上記構成において、汚泥容量を測定する場合、図示しない曝気槽等から水中ポンプや陸上ポンプやエアリフトポンプ等で曝気槽内の汚泥混合液をSV計測槽30へと導入してくる。SV計測槽30へと導入する汚泥混合液の量はタイマーや図示しない電磁流量計や図示しない液面レベルセンサーによって計測する。汚泥混合液をSV計測槽30へ導入後、30分間静置し、濃縮汚泥57と汚泥上澄61との界面がどの程度の高さに位置するかを測定する。
【0114】
このため、光源52を点灯し、光を第1の集光手段51によって集光し、集めた光を導光手段53によって発光部54へと導き、発光部54の乱反射層56によって光を乱反射させ導光手段53内で光を均一にした上で、発光部54から面発光させてSV計測槽30へと照射するようになっている。
【0115】
SV計測槽30内へ照射された光は濃縮汚泥57では遮られるため、光センサー59は光を検出しない。一方、汚泥上澄61では光は遮られないため、光センサー59は光を検出する。このように、光を検出する光センサー59と光を検出しない光センサー59の個数や予め設定した位置によって汚泥界面を簡単で確実に捉え、汚泥容量を測定することが可能となる。なお、静置時間(30分)は一例であり、必要に応じて数分〜数時間で設定することが可能である。
【0116】
このような構成の測定装置のため測定の精度は光センサー59の個数によって左右される。例えば、図8中では光センサー59の数は10個で等間隔に配置されているので、10%刻みで汚泥容量を測定することが可能である。ここで、光センサー59の数を20個にすると、5%刻みで汚泥容量を測定することが可能となる。活性汚泥処理維持管理の実情からすると5%刻み程度で十分に実用に耐えうる精度であるといえる。
【0117】
光センサー59の信号は信号線60によって制御部12へと伝えられる。
【0118】
汚泥容量を測定した後は、SV計測槽排出弁22を開けて、SV計測槽30内の汚泥混合液を排出し、その後SV計測槽排出弁22を閉め、SV洗浄配管26から洗浄水を導入することで、SV計測槽30内を洗浄するようになっている。ここで、洗浄水は水道水、地下水などの工業用水、排水処理施設の処理水などでよい。
【0119】
以上のような構成とすることで、光源52の光を無駄なくSV計測槽30へ照射することができ、SV計測槽30を透過した光を光センサー59で確実に検知できるようなる。また、光源52の光を発光部54から面発光させてSV計測槽30へと照射できるので、SV計測槽30を透過する光のムラも抑えることができ、光センサー59に到達する光のムラも抑えることができ、安定した光の検出が可能となる。
【0120】
ここで、光源52としては蛍光灯や白熱電球などが一般的であるが、LEDを用いるのが最もよい。LEDは電気エネルギーを直接光へと変換するため、輻射熱の発生がなく、光源52から発生する輻射熱の影響によるSV計測槽30内の汚泥混合液の対流を防ぎ、安定した汚泥容量を測定することが可能となる。
【0121】
また、光源52の発する光は可視光であればよいが、可視光の中でも赤色であるのが望ましい。赤色の光は波長が700nm程度と長いため、水中の懸濁物による光の減衰を受け難い性質を持っており、汚泥混合液中に懸濁物質が多い場合であっても確実に汚泥容量を測定することができる。
【0122】
また、光センサー59は第2の集光手段58によってSV計測槽30内から光を集めるため、汚泥混合液が着色等しており、光を透過しにくい性状のものであっても、確実に汚泥容量を測定することが可能となる。ここで、第2の集光手段58はプラスチック(アクリル等)やガラスによるレンズであり、SV計測槽30内を透過してきた光をできるだけ多く集めるために用いるものである。
【0123】
また、光センサー59は感度が最大となる波長が種類によって異なるため、光源52の光の波長にマッチした光センサー59を選定することが重要である。
【0124】
図9は本発明の図8おける汚泥容量測定装置の光センサー59部での水平断面を上側から見た構成図である。
【0125】
SV計測槽30は空気層71dを挟んで内面と外面から構成されており(簡単のため、図6では説明と共に省略)、外面・内面ともに発光部75側は発光透過部71a、光センサー80側の面は受光透過部71bのように光を透過するように透明な材質となっている。発光透過部71a、受光透過部71b以外は外面に遮光層71c(図2中で太線で示す)が備えてあり、外部からの光を反射するようになっている。
【0126】
ここで、SV計測槽30の材質はプラスチックやガラスが望ましい。また、遮光層71cは簡易的にはアルミホイルでもよいが、黒色などの下塗りをした上でシルバーや白色など光を反射し易い塗料を使用しても良い。
【0127】
このように、SV計測槽30に空気層71dを設けることで、SV計測槽30は断熱効果を有し、またSV計測槽30の外面は光を反射するようになる。このため、SV計測槽30内の汚泥混合液は外気温や輻射熱の影響を受け難く、その結果SV計測槽30内は温度分布が均一となり、SV計測槽30内の汚泥混合液は対流が発生し難くなり、気温の高・低、夜・昼などの外部環境の変化に影響を受けることなく安定して汚泥容量を測定することが可能となる。
【産業上の利用可能性】
【0128】
本発明による曝気槽制御方法は、下水処理場、事業所等における有機性排水の処理施設における曝気槽の監視に対して適用することができる。
【図面の簡単な説明】
【0129】
【図1】本発明の実施の形態1の曝気槽制御システムを示すブロック図
【図2】本発明の実施の形態1の曝気槽内における酸素消費速度の分布を示すグラフ
【図3】本発明の実施の形態1の動作を示すフローチャート
【図4】(a)は本発明の実施の形態1の曝気槽の状態を経過日時と酸素消費速度の関係で示したグラフ、(b)は同曝気槽の状態を酸素消費速度の分布で示したグラフ
【図5】(a)は本発明の実施の形態1の曝気槽の処理状態が適正な場合を示したグラフ、(b)は同曝気槽の処理が不足の場合を示したグラフ
【図6】一般的な排水処理施設における酸素消費速度の分布を示すグラフ
【図7】本発明の実施の形態2の計測制御装置を示すブロック図
【図8】本実施の形態におけるSV計測槽30を示す構成図
【図9】本発明の図6おけるSV計測槽30の断面を示す構成図
【符号の説明】
【0130】
1 調整槽
2 曝気槽
3 沈殿槽
4 散気管
5 インバーター
6 曝気ブロア
7 Rrサンプリングポンプ
8 混合液採取弁
9 SVサンプリングポンプ
10 排水処理系
11 Rr計測槽
12 制御部
13 DOセンサー
14 温度センサー
15 計測槽散気管
16 エアーポンプ
17 撹拌機
18 流入口
20 計測制御系
21 Rr計測槽排出弁
22 SV計測槽排出弁
25 Rr洗浄配管
26 SV洗浄配管
27 Rr計測槽流出口
28 汚泥混合液導入管
30 SV計測槽
31 SV計測槽流出口
41 汚泥受槽
42 循環ポンプ
43 汚泥界面計
44 汚泥受槽流入弁
51 第1の集光手段
52 光源
53 導光手段
54 発光部
56 乱反射層
57 濃縮汚泥
58 第2の集光手段
59 光センサー
60 信号線
61 汚泥上澄
71a 発光透過部
71b 受光透過部
71c 遮光層
71d 空気層
75 発光部
80 光センサー
90 表示部
【技術分野】
【0001】
本発明は、排水処理施設において、下水道や工場などから排出される有機物を含んだ被処理水である排水を微生物によって酸化分解処理する主要処理工程である曝気槽の監視方法に関するものである。
【背景技術】
【0002】
従来、下水処理場や工場・事業所等での有機性排水処理は、微生物を使った活性汚泥法によりなされている。
【0003】
活性汚泥法は、活性汚泥中の好気性微生物(細菌、原生動物など)が排水中の有機物を代謝作用によって二酸化炭素と水に分解するものであり、処理効率が高く、経済的な排水の処理方法として広く普及している。しかし、汚泥中の微生物は様々な要因により有機物の分解特性が変化するため、連続的かつ安定的に排水処理を行うには適正な運転管理を行う必要がある。
【0004】
排水処理における管理対象項目としては、溶存酸素濃度(以下、DOと省略)、pH、酸化還元電位(以下、ORPと省略)、汚泥濃度(以下、MLSSと省略)が代表的であり、これら以外に、水温、流入水量、汚泥容量なども測定され。管理者はこれら複数の計測項目の変化を監視しながら排水処理が適正となるよう曝気風量やMLSS、流入負荷量、薬剤注入量などを調整し曝気槽を運転管理している。
【0005】
ところで、近年は企業や国・地方自治体等の社会的責任がクローズアップされてきており、排水処理においてもコスト削減のみならず、環境負荷低減のさらなる追及が求められている。例えば、公共下水処理分野では同時に測定した複数の管理対象項目に基づいて、最適な運転条件を数学モデルの数値計算によって推定し、曝気槽を自動管理する高度な計測制御技術や、ADSLや光ファイバー等の高速ブロードバンドサービスの普及によって、遠隔地の処理場を一箇所で集中管理する遠方監視技術の導入が進みつつある。しかし、このような計測制御・監視技術が食品工場等の事業系排水処理分野に適用されている例は少ない。その理由は次の3点である。
・事業系排水処理施設では高度な技術を導入する為のコストが捻出できない。
・公共下水処理に比べ工場の操業状況により流入負荷の変動が大きく、計測制御技術の適 用が技術的に困難。
・事業系排水処理施設の管理者は工場の操業状況や季節変動の影響など、長年培ってきた 経験と勘があり、装置による自動運転に対して心理的な抵抗がある。
【0006】
従って、事業系の中・大規模排水処理施設では、ほとんどの処理場において管理者を常時配置し、有人で運転管理が行われている。しかし、近年の少子高齢化の進行により、排水処理施設管理のノウハウが熟練管理者から若手管理者へ伝承されなくなってきているため、排水処理施設の管理に不慣れな管理者を支援するため、上記(1)〜(3)の課題を解決できる曝気槽の監視技術が求められている。
【0007】
そこで、排水処理の形式、制御の目的、処理場の規模、排水の性状等に応じて(1)溶存酸素濃度による監視、(2)酸素消費速度(以下、Rrと省略)による監視、(3)曝気槽の状態による監視、など各種の監視方法が提案・実施されている。以下、これらについて説明する。
(1)溶存酸素濃度による監視
曝気槽の溶存酸素濃度を連続計測して曝気槽の状態を表示する方法である。曝気槽の溶存酸素濃度は、曝気槽への酸素供給速度と曝気槽内の汚泥のRrの比を表しており、酸素供給速度が一定であれば、汚泥のRrにより増減する。また、Rrは負荷の有無大小により変化し、溶存酸素濃度もこれに合わせて変化するので、連続的に溶存酸素濃度の時間変化を計測することにより曝気槽の負荷状態を視覚的に把握することができる。しかし、このような溶存酸素濃度による曝気槽の監視技術は、曝気槽への酸素供給速度が常に一定であるという仮定に基づいており、この仮定が成り立たないと正しく曝気槽の状態を把握できない。曝気槽の酸素供給能力は総括酸素移動容量係数(以下、KLaと省略)で表されるが、この値は汚泥の濃度や散気管の目詰まり等の影響により変化し一定ではない。また、測定もかなりの手間と労力を要するため、曝気槽が稼動中にKLaを計測して補正することは困難である。
(2)Rrによる監視
汚泥のRrを直接測定する方法である。この方法は、汚泥のRrと負荷量に相関があることを利用しており、Rrの計測値から負荷量を推定して表示するものである。この方法によればKLaの変動の影響を除外して、曝気槽に流入する負荷の変化を得ることができる。
しかし、この方法ではRrの良否を判断する基準が明確でない為、相対的な負荷の大小を知るに留まり、曝気槽の状態を判断することまではできない。
(3)曝気槽の状態による監視
曝気槽の流下方向に沿って複数箇所のRrから曝気槽の処理状態を判断して表示する曝気槽の監視方法が提案されている(例えば特許文献1、2参照)。
この方法では、負荷が連続的に流入、流出する押し出し流れ型の活性汚泥法において、Rrは上流から下流にかけて減少していく分布を示すことを利用し、曝気槽における流下方向のRrの分布を測定し、予め設定した標準のRrの分布と計測したRrの分布を表示して比較することにより曝気槽の状態の良否を判断するものである。
【特許文献1】特開昭61−8662号公報
【特許文献2】特開昭63−156596号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、上記従来の特許文献1及び2に記載の方法は、あらかじめ設定した標準のRrの分布との比較という方法で曝気槽の状態を表示し、かつ判断するものであるが、汚泥のRrは負荷以外にも水温変化や流入負荷の性状により変化するため、標準のRrの分布を一義的に定義できず、曝気槽の状態を正しく判断し、表示するのは困難であるという課題があった。
【0009】
そこで本発明は、判断の基準となる内生呼吸の酸素消費速度を、汚泥の活性状態の変化を反映した無負荷状態の酸素消費速度として表示することにより、排水処理施設の管理者が曝気槽の処理状態、負荷状態、及び汚泥の活性状態の変化等を視覚的に把握できる曝気槽の監視方法を実現することを目的とする。
【0010】
さらに、曝気槽の状態を判断して表示することにより、不慣れな管理者でも曝気槽の状態を適切に把握することができる曝気槽の監視方法を実現することを目的とする。
【課題を解決するための手段】
【0011】
上記従来の課題を解決するために、本発明の曝気槽の監視方法は、曝気槽内における流れ方向に沿って、複数箇所の汚泥と排水の混合液のRrを測定し、曝気槽内の汚泥の汚泥容量を測定し、測定したRr分布と汚泥の内生呼吸のRrを比較するとともに、測定した汚泥容量を所定値と比較することにより、汚泥による排水処理状況が適正かどうか判断し、判断した結果を外部に表示するものである。
【発明の効果】
【0012】
本発明により、判断の基準となる内生呼吸の酸素消費速度を、汚泥の活性状態の変化を反映した無負荷状態の酸素消費速度として表示することにより、排水処理施設の管理者が曝気槽の処理状態、負荷状態、及び汚泥の活性状態の変化等を視覚的に把握できる曝気槽の監視方法が得られる。
【0013】
さらに、汚泥の活性状態の変化を反映した基準により曝気槽の状態を判断して表示でき、不慣れな管理者でも曝気槽の状態を適切に把握することができる曝気槽の監視方法が得られる。
【発明を実施するための最良の形態】
【0014】
本発明の第1の実施の形態による曝気槽の監視方法は、曝気槽内における流れ方向に沿って、複数箇所の汚泥と排水の混合液の酸素消費速度分布を測定し、曝気槽内の汚泥の汚泥容量を測定し、測定した酸素消費速度分布と汚泥の内生呼吸の酸素消費速度を比較するとともに、測定した汚泥容量を所定値と比較することにより、汚泥による排水処理状況が適正かどうか判断し、判断した結果を外部に表示するものである。
【0015】
本実施の形態によれば、酸素消費速度分布と内生呼吸の酸素消費速度の比較だけではなく、汚泥容量を所定値と比較することで、酸素消費速度分布と内生呼吸の比較だけによるよりも、より正確な排水処理状況の監視を実現することができる。
【0016】
本発明の第2の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、内生呼吸の酸素消費速度は、無負荷状態における混合液の酸素消費速度の測定値とするものである。
【0017】
本実施の形態によれば、内生呼吸の酸素消費速度を曝気槽内の混合液から直接測定することにより、より正確な内生呼吸の酸素消費速度を得ることができる。
【0018】
本発明の第3の実施の形態による曝気槽の監視方法は、第2の実施の形態による曝気槽の監視方法において、無負荷状態は、曝気槽へ流入する負荷がない状態とするものである。
【0019】
本実施の形態によれば、曝気槽に負荷が無い日や時間が予め特定できる場合などにおいて、容易に無負荷状態と判別でき内生呼吸の酸素消費速度を得ることができる。
【0020】
本発明の第4の実施の形態による曝気槽の監視方法は、第2の実施の形態による曝気槽の監視方法において、無負荷状態は、曝気槽の流れ方向に沿って複数箇所で測定した酸素消費速度分布の傾きが水平の状態とするものである。
【0021】
本実施の形態によれば、曝気槽の負荷が無い状態であることを酸素消費速度の分布の傾きから判断できるようになり、曝気槽の負荷が流入しない日や時間を予め特定することが不要となる。
【0022】
本発明の第5の実施の形態による曝気槽の監視方法は、第2の実施の形態による曝気槽の監視方法において、無負荷状態は、曝気槽の流れ方向の最下流部から混合液を採取し、採取した混合液を曝気して残留負荷を全て消費させた状態とするものである。
【0023】
本実施の形態によれば、最も残留負荷が低い最下流部の混合液を強制的に無負荷の状態にすることにより、曝気槽が必ずしも適当な頻度で無負荷の状態にならないような場合においても、確実に内生呼吸の酸素消費速度を得ることができる。
【0024】
本発明の第6の実施の形態による曝気槽の監視方法は、第5の実施の形態による曝気槽の監視方法において、採取した混合液は、曝気する前に上澄みと懸濁物に分離し、上澄みを負荷のない清水で置換するものである。
【0025】
本実施の形態によれば、混合液中に残留した負荷を強制的に取り除くことにより、無負荷状態にするための曝気時間を大幅に短縮することができる。
【0026】
本発明の第7の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、測定した酸素消費速度が内生呼吸の酸素消費速度より低いとき、測定した酸素消費速度を内生呼吸の酸素消費速度とするものである。
【0027】
本実施の形態によれば、微生物の活性度が下がり、測定した酸素消費速度が内生呼吸の酸素消費速度以下となった場合でも、測定した酸素消費速度を内生呼吸の酸素消費速度とすることにより、曝気槽が無負荷の状態にならない場合においても、活性度の変化に追従し、内生呼吸の酸素消費速度を得ることができる。
【0028】
本発明の第8の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、汚泥容量は、曝気槽の流れ方向の最下流部で測定した汚泥容量とするものである。
【0029】
本実施の形態によれば、曝気槽から沈殿槽へ流出する直前の汚泥の汚泥容量に基づいて、排水処理が適正かどうかを判断することができるため、沈殿槽における汚泥と処理水の沈降分離性を正確に把握することが可能となる。
【0030】
本発明の第9の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、曝気槽の流れ方向の最下流部で測定した酸素消費速度が内生呼吸よりも大きく、かつ、汚泥容量が所定値よりも大きい場合に、汚泥による排水処理が不足している、と判断するものである。
【0031】
本実施の形態によれば、内生呼吸遷移点は曝気槽内部に無く、かつ、沈殿槽において汚泥と処理水の沈降分離が不可能になりつつある状態、すなわち排水処理として問題となりつつある状態を把握することが可能となる。
【0032】
本発明の第10の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、曝気槽の流れ方向の最下流部で測定した酸素消費速度が内生呼吸よりも大きく、かつ、汚泥容量が所定値よりも小さい場合に、汚泥による排水処理が適正である、と判断するものである。
【0033】
本実施の形態によれば、内生呼吸遷移点は曝気槽内に無いが、沈殿槽において汚泥と処理水の沈降分離が可能な状態、すなわち排水処理として適正な状態を把握することが可能となる。
【0034】
本発明の第11の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、曝気槽の流れ方向の最下流部で測定した酸素消費速度が内生呼吸の酸素消費速度より低く、かつ、汚泥容量が所定値よりも小さい場合に、測定した酸素消費速度を内生呼吸の酸素消費速度とし、汚泥による排水処理が過剰である、と判断するものである。
【0035】
本実施の形態によれば、活性汚泥の水温変化、排水の水質変化等により内生呼吸が変動する場合においても、曝気槽における排水処理の過不足を精度よく検出することが可能となる。
【0036】
本発明の第12の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、曝気槽の流れ方向の最下流部で測定した酸素消費速度が内生呼吸の酸素消費速度と等しく、かつ、汚泥容量が所定値よりも小さい場合に、汚泥による排水処理が過剰である、と判断するものである。
【0037】
本実施の形態によれば、内生呼吸遷移点は曝気槽内の最下流部にあるが、沈殿槽において汚泥と処理水の沈降分離が可能な状態、すなわち排水処理として適正な状態を把握することが可能となる。
【0038】
本発明の第13の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、汚泥による排水処理が適正かどうかの判断は、酸素消費速度と同時にMLSSを測定して酸素利用速度係数を算出し、酸素利用速度係数を酸素利用速度の代わりに用いて行うものである。
【0039】
本実施の形態によれば、汚泥の濃度変化による酸素消費速度の影響を除去でき、単に酸素消費速度のみを測定するよりも正確に微生物の活性による酸素消費速度を求めることが可能となる。
【0040】
本発明の第14の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、汚泥による排水処理が適正かどうかの判断は、汚泥容量と同時にMLSSを測定して汚泥容量指標を算出し、汚泥容量指標を汚泥容量の代わりに用いて行うものである。
【0041】
本実施の形態によれば、汚泥の濃度変化による汚泥容量の影響を除去でき、単に汚泥容量のみを測定するよりも正確に汚泥と処理水の沈降分離性を把握することが可能となる。
【0042】
本発明の第15の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、排水の処理状況を文字で表示するものである。
【0043】
本実施の形態によれば、施設の管理者が曝気槽の状態が適正かどうか容易に確認することができる。
【0044】
本発明の第16の実施の形態による曝気槽の監視方法は、第1の実施の形態による曝気槽の監視方法において、排水の処理状況を図で表示するものである。
【0045】
本実施の形態によれば、施設の管理者が曝気槽の状態が適正かどうか容易に確認することができる。
【0046】
以下、本発明の実施例における曝気槽の監視方法について、図面を参照して説明する。
【0047】
(実施の形態1)
図1は本実施の形態における曝気槽の制御方法の一例を示すシステム図で、制御対象を含んだ排水処理系10と計測制御系20を示している。
【0048】
■排水処理系10の構成と動作
排水処理系10は排水を一時的に貯留する調整槽1と、排水と活性汚泥の混合液を曝気することにより、微生物によって排水中の有機物を酸化分解する曝気槽2と、曝気槽2で処理された混合液を重力によって活性汚泥と処理水とに沈降分離する沈殿槽3で構成されている。ここで、矢印は排水及び混合液の流れの方向を表している。
【0049】
処理対象の有機物を含んだ排水は調整槽1に流入して貯留され、ここである程度の負荷変動は平均化されほぼ一定の流量・負荷となって曝気槽2へと送られる。
【0050】
曝気槽2では排水と汚泥が混合され混合液となると共に曝気ブロア6から空気が散気管4を介して送り込まれ、散気管4から発生した有酸素気泡が酸素を混合液中に供給すると共に混合液を撹拌する。
【0051】
曝気槽2内部では、微生物が酸素を消費しながら有機物を体内に取り込み、続いて有機物を酸化分解して水と二酸化炭素に分解する。微生物による有機物の酸化分解は曝気槽2の最上流部から最下流部へ流れるにつれて進行し、混合液は沈殿槽3へと流入する。
【0052】
沈殿槽3に送り込まれた混合液は重力により汚泥と上澄み液に沈降分離され、上澄み液は処理水として系外へと放流される。沈降分離された汚泥の一部は返送汚泥として曝気槽2の上流部へ戻され生物処理に再利用される。
【0053】
■計測制御系20の構成と動作
計測制御系20は内部にRr計測槽11と汚泥容量(SV)計測槽30と制御部12と制御部12に表示部90とを有している。
【0054】
Rr計測槽11はDOセンサー13、温度センサー14、計測槽散気管15、撹拌機17を備え、計測槽散気管15は空気配管によってエアーポンプ16に接続されている。
【0055】
曝気槽2にはRrサンプリングポンプ7が流れ方向に沿って最上流部と最下流部を含む複数箇所に配置されており、Rrサンプリングポンプ7は混合液採取弁8を介してRr計測槽11の流入口18に接続されている。Rr計測槽11の底部にはRr計測槽流出口27があり、Rr計測槽流出口27はRr計測槽排出弁21を介して曝気槽2の最上流部近傍に接続されている。更に、曝気槽2の最下流部にはSVサンプリングポンプ9が配置されており、SV計測槽30へ混合液を供給するようになっている。SV計測槽30の底部にはSV計測槽流出口31があり、SV計測槽流出口31はSV計測槽排出弁22を介して、曝気槽最下流部に接続されている。
【0056】
制御部12はエアーポンプ16、撹拌機17、インバーター5、Rrサンプリングポンプ7、SVサンプリングポンプ9、Rr計測槽排出弁21、SV計測槽排出弁22と電気的に接続されており(図中、破線で示す)、各機器の運転制御が可能となっている。また、DOセンサー13および温度センサー14の測定信号線(図中、破線で示す)はそれぞれ制御部12に接続されており、測定信号を制御部12へ取り込むことが可能となっている。また、計測データや判断結果は表示部90に文字や図で表示することが可能となっている。尚、図1において、Rrサンプリングポンプ7、混合液採取弁8、Rr計測槽排出弁21、SV計測槽排出弁22の信号線は便宜上1本の破線で示しているが、各機器は個別に制御できるようになっている。
【0057】
なお、Rr計測槽11、SV計測槽30にはセンサー類の洗浄用として、Rr洗浄配管25、SV洗浄配管26が接続されており、水道水や地下水等の清澄な水が供給されるようになっている。
【0058】
まず、酸素消費速度の測定は次のように行う。Rrサンプリングポンプ7のうち1台を作動させ、作動させたRrサンプリングポンプ7に対応した混合液採取弁8を開き(通常、混合液採取弁8は閉じた状態である)、混合液を流入口18からRr計測槽11へ流入させ、混合液をRr計測槽11に一定量貯留する。次に、エアーポンプ16と撹拌機17を作動させ、計測槽散気管15によってRr計測槽11内の混合液を曝気すると同時に、DOセンサー13、温度センサー14による測定も開始する。測定開始後、制御部12へDOセンサー13、温度センサー14の測定値が一定時間ごとに逐次記録され、Rr計測槽11内の混合液のDOが曝気により上昇し、一定となったところで撹拌機17は作動させつつ、エアーポンプ16の作動を停止することにより、Rr計測槽11内の混合液の酸素消費速度をDOの減少曲線から算出する。なお、酸素消費速度は水温による変化が大きいため、制御部12にて温度の変化分を補償することにより、温度の影響を排除することが出来る。
【0059】
DOがほぼ0になったらDOセンサー13、温度センサー14による測定を停止し、Rr計測槽排出弁21を開いて、Rr計測槽11内部の混合液をRr計測槽流出口27より曝気槽2へ返送する。ここで、曝気槽2に返送する位置は処理水への影響を考慮し曝気槽2の最上流部であることが望ましい。混合液を曝気槽2へ返送した後は、Rr洗浄配管25より、水道水や地下水などの洗浄水をRr計測槽11へ流入させ、計測槽散気管15及び撹拌機17を作動させて、DOセンサー13、温度センサー14、Rr計測槽11の洗浄を行うことが望ましい。
【0060】
上記のようにして酸素消費速度を測定するが、この測定を曝気槽2の最上流部から最下流部まで順次に測定していくことにより、曝気槽2内の酸素利用速度分布を得ることが可能となる。
【0061】
次に、汚泥容量の測定は次のように行う。SVサンプリングポンプ9を作動させ、曝気槽2最下流部の混合液をSV計測槽30へ流入させ、汚泥容量を測定し、測定値は制御部12へと送られる。測定終了後、SV計測槽排出弁22を開いて、SV計測槽30内部の混合液をSV計測槽流出口31より曝気槽2へ返送する。混合液を曝気槽2へ返送した後は、SV洗浄配管26より、水道水や地下水などの洗浄水をSV計測槽30へ流入させ、SV計測槽30の洗浄を行うことが望ましい。
【0062】
以上が排水処理系10および計測制御系20の構成と動作であるが、ここで、曝気槽2内部での排水の処理状況について図2を用いてさらに詳しく説明する。
【0063】
曝気槽2内部に流入した排水は曝気槽2の最上流部で汚泥と混合され、汚泥中の微生物は、負荷である排水中の有機物を急速に体内に取り込む。この際、微生物は多量に酸素を消費するため酸素消費速度は最上流部で最も高い値を示したあと急激に低下する(図中のA部)。
【0064】
混合液が曝気槽2を流下するにつれて、微生物は体内に取り込んだ有機物を徐々に酸化分解するため、酸素消費速度は下流に行くに従い徐々に低下する。そして、微生物が体内に取り込んだ有機物を全て分解すると、有機物の消費を伴わない呼吸、いわゆる内生呼吸状態となり、酸素消費速度は一定となる。
【0065】
ここで、曝気槽2の状況は大きく(1)処理過剰A、(2)処理過剰B、(3)最適処理、(4)処理不足の4つに分類することができ、(1)〜(4)の各状況を判断する上でのポイントは有機物を分解する呼吸が内生呼吸に遷移する位置(内生呼吸遷移点)が「曝気槽2内のどの位置にあるか」と、「沈殿槽3において処理水と活性汚泥の沈降分離を良好に行えるかどうか」である。次に(1)〜(4)の各状況の判断方法を説明する。
(1)処理過剰A
図2中でbに示すように、内生呼吸遷移点が曝気槽2の最下流部より上流側となり、かつ沈殿槽3において処理水と活性汚泥の沈降分離が良好に行える場合は、内生呼吸遷移点より下流側の汚泥は酸化分解処理を行っていないことになり、流入負荷に対して曝気等の処理が過剰であると判断できる。
(2)処理過剰B
図2中でfに示すように、内生呼吸遷移点が曝気槽2の最下流部にあり、かつ沈殿槽3において処理水と活性汚泥の沈降分離が良好に行える場合は、曝気槽2内で汚泥による酸化分解処理は終わっていないが、排水処理としては余裕があることになり、流入負荷に対して曝気等の処理が過剰であると判断できる。
(3)最適処理
図2中でaに示すように、内生呼吸遷移点が曝気槽2の最下流部より後ろ、すなわち曝気槽2内で内生呼吸遷移点に到達しない場合は、曝気槽2の最下流部でも微生物の体内に有機物が残留している事になる。しかし、沈殿槽3において処理水と活性汚泥の沈降分離が良好に行えるのであれば、流入負荷に対して曝気等の処理は過不足なく、排水処理としては最も効率が良い状況であると判断できる。
(4)処理不足
図2中でcに示すように、内生呼吸遷移点が曝気槽2の最下流部より後ろ、すなわち曝気槽2内で内生呼吸遷移点に到達せず、かつ沈殿槽3において処理水と活性汚泥の沈降分離が行えない状況であれば、排水処理として処理が不足している状況であると判断できる。
【0066】
活性汚泥は曝気を過剰に行って、処理過剰が進行すると菌体外物質の生産不足による汚泥の沈降性の悪化などが生じる恐れがあり、一方、処理不足が進行しても、菌体内に有機物が残存して蓄積し、微生物の有機物の吸収能力が低下し、汚泥の沈降分離性が悪化する。つまり、曝気槽2の運転状況を最適に制御するためには、内生呼吸遷移点が曝気槽内部に無い場合でも、沈殿槽において汚泥と処理水の沈降分離が可能な状態を判断し、表示することが最大のポイントである。
【0067】
次に本実施の形態における曝気槽の監視方法について図3のフローチャートを用いて説明する。
【0068】
図3においてR1〜R4はRr計測槽11で測定された曝気槽2における流れ方向の酸素消費速度を表し、R1が最上流部における値を、R4が最下流部における値を表す。Nは測定時点の内生呼吸の酸素消費速度を表す。
【0069】
まずR1〜R4を測定する。
【0070】
次に、R1とR2を比較し、R1>R2であれば、曝気槽に流入する負荷があると判断する。一方、R1>R2でなければ、R1=R2=R3=R4とみなすことができ、曝気槽2内で酸素消費速度分布の傾きは無く、曝気槽2は無負荷すなわち内生呼吸状況と判断できるため、R4を内生呼吸の値としてNを更新する。
【0071】
次に負荷があると判断した場合は、現在の内生呼吸の酸素消費速度NとR4を比較し、R4>Nであれば、最下流部の酸素消費速度が内生呼吸の酸素消費速度より大きいことになり、さらにSV>Cであれば、汚泥の沈降性も悪化しつつあるため、処理が不足していると判断でき、曝気風量を増加するよう制御する。一方、R4>NかつSV<Cであれば、流入負荷に対して曝気等の処理は過不足なく、処理は適正と判断できる。尚、Cは所定値としてあらかじめ入力する値であるが、SV30で50%以下とするのが望ましい。Cを大きく設定し過ぎると、汚泥の沈降分離性の悪化が止まらなくなり、汚泥のキャリーオーバーによる環境汚染を引き起こす場合があるので注意が必要である。
【0072】
次に、R4<NかつSV<Cの場合は、水温の変化や排水の水質変化等により、汚泥の活性度が低下したことによる影響と判断でき、R4の値を強制的に内生呼吸の酸素消費速度としてNを更新し、かつ処理が過剰と判断できる。一方、R4<NかつSV>Cの場合は、何らかの原因によって汚泥の活性度が低下し、かつ汚泥の沈降分離性も悪化しつつある状態のため、安全のため処理不足と判断する。
【0073】
次に、R4>NでもなくR4<Nでもない状態、つまりR4=NかつSV<Cの場合は、曝気槽2の最下流部で汚泥の活性度は内生呼吸となっており、かつ汚泥の沈降分離性も良好であるため、処理過剰と判断する。一方、R4=NかつSV>Cの場合は、曝気槽2の最下流部で汚泥の活性度は内生呼吸となっているが、何らかの原因で汚泥の沈降分離性が悪化しつつある状態のため、安全のため処理不足と判断する。
【0074】
ここで、流下方向における4箇所の酸素消費速度及び内生呼吸の酸素消費速度が得られたので、表示部90にこの結果を表示する。表示部90への表示方法の一例として、図4(a)のように横軸に経過日時、縦軸に各酸素消費速度の測定値及び内生呼吸の酸素消費速度を表示すれば、管理者は内生呼吸の酸素消費速度という基準を目安に、曝気槽2の負荷の有無や内生呼吸の酸素消費速度の変化を視覚的に捉えることができる。また、別の表示方法として、図4(b)のように横軸に曝気槽2の位置をとり、現在の内生呼吸の酸素消費速度と測定時間毎の酸素消費速度の分布を表示することにより、曝気槽2の処理状態をより詳細に把握することもできる。
【0075】
このように、判断の基準を汚泥の活性状態の変化を反映した無負荷状態での酸素消費速度とすることにより、曝気槽2の状態を適切に表示することができる。
【0076】
次に、判断結果を管理者が曝気槽2の状態を把握できるように表示部90に表示する。処理状態の判断結果の表示方法としては図5で示した酸素消費速度の経時変化を示すグラフや横軸に曝気槽2の位置を示すグラフを表示し、同時に、現在の処理状況を「処理は適正です」、「処理が過剰です」、「処理が不足しています」のように文字で表示するとわかりやすい。また、図5に示すように、曝気槽2の絵を表示し、例えば(a)のように処理適正の時は曝気槽2の中の汚泥の色が標準的な汚泥の色を示す黄土色を、処理不足のときは(b)のように黒色に近い色にするなど、その状況によって色や絵を変化させるようにすれば、管理者が曝気槽2の状態をより理解しやすい。
【0077】
このように、曝気槽2の状態をグラフにより視覚的に表示するだけでなく、処理状態の判断まで行って結果を表示することにより、熟練した管理者を支援するだけでなく不慣れな管理者でも曝気槽2の状態を適切に把握することができる。
【0078】
ここで、従来の曝気槽の監視方法では酸素消費速度の分布の傾きが変わる変曲点で内生呼吸遷移点の位置が適正かどうか判断するが、あらかじめ事前に調査測定した最適な酸素消費速度の分布との比較を用いる方法によっているため、汚泥の活性が変化した場合は最適な酸素消費速度の分布が変化するので、例えば図2におけるaが変化することになるので、内生呼吸遷移点が適正な位置にあるかどうかの判断を誤る。
【0079】
しかし上記のように、本実施の形態では内生呼吸遷移点が適正な位置にあるかどうかの判断を内生呼吸の酸素消費速度の値と比較しており、内生呼吸の酸素消費速度を常に曝気槽2の混合液を用いて更新することができるため、活性度が変化した場合でも内生呼吸遷移点が適正な位置にあるかどうかの判断を正しく行うことができる。かつ、内生呼吸遷移点が曝気槽2内部に無い場合でも、沈殿槽3において汚泥と処理水の沈降分離が可能な状態を判断し、良好な処理水質を維持しつつ、正確な曝気槽の監視方法を実現することができる。
【0080】
尚、本実施の形態では測定位置を4箇所で説明したが、測定箇所数は処理場の設置状況や処理の要求精度、コスト等により決定すればよく、設置箇所が多い方が緻密な制御が行えるがその分コストが上昇する。
【0081】
次に、ある事業所の排水処理施設における酸素消費速度分布について説明する。
【0082】
図6は、ある事業所の排水処理施設における酸素消費速度の流れ方向の分布を表している。
【0083】
ここでは、事業所が稼動している日と非稼動日において計測を行い、非稼働日は流入負荷が0であった。
【0084】
図6にあるように稼働日における酸素消費速度は曝気槽2の最上流部が非常に高い値を示し、下流に行くに従い急激に低下し、最下流部の手前でほぼ一定の状況となった。ここではR1>R2であるので稼働日に負荷があることが図から判断できる。
【0085】
また、流入負荷が0の非稼働日における酸素消費速度は、曝気槽の位置によらず一定であり、R1≒R2≒R3≒R4であるので無負荷状態であることが判断でき、この値は内生呼吸の酸素消費速度Nとなる。
【0086】
このNを稼働日の酸素消費速度の分布と比較することにより、内生呼吸遷移点は図4の5の位置であることがわかり、稼働日においては曝気過剰であり曝気量を低減することにより省エネルギーが実現できることがわかった。このように、本発明の曝気槽の監視方法は実際の処理施設に適用可能である。
【0087】
以上のように、本実施の形態によれば、活性汚泥が最適な状況となるように曝気槽を監視し、制御することができるようになり、事業所等での繁忙期や休日、夜間など、負荷量が急激に変動するような場合でも従来のように安全を見て曝気過多で運転する必要が無くなり省エネルギーが図れると同時に、急な負荷の変動に対応するための管理者を常時配置させる必要が無くなり、管理コストの低減にも寄与できる。
【0088】
尚、本実施の形態では酸素消費速度で内生呼吸遷移点を特定する方法で説明したが、通常、曝気槽は汚泥濃度を一定に保つように運転されているのでこの方法で問題は無い。
【0089】
しかし、より正確な検知を行うには計測槽に汚泥濃度計を設置し、酸素消費速度を汚泥濃度で除した単位汚泥重量あたりの酸素消費速度いわゆる酸素利用速度係数(Kr)を用いる方がより正確に内生呼吸遷移点を特定できる。また、汚泥容量についても、汚泥容量を汚泥濃度で除した汚泥容量指標(汚泥の占める容積)を用いる方がより正確に汚泥の沈降分離性を判断することができる。一般に汚泥容量指標は300mg/l以下とするのが望ましい。
【0090】
尚、本実施の形態において、制御対象を曝気風量として説明したが、曝気槽2の制御対象は曝気風量に限定されるものではなく、曝気槽2内の返送汚泥量や、負荷の流入量などを制御対象としてもよい。
【0091】
また、酸素消費速度の測定を別槽のRr計測槽11を用いて測定する方法で説明したが、酸素消費速度の測定方法は曝気槽2内で直接測定する方法を用いてもよい。
【0092】
また、本実施の形態では、無負荷状態の判別を曝気槽2の酸素消費速度の分布の傾きが水平であることで判断すると説明したが、例えば曝気槽2に負荷が流入しない日や時間があらかじめわかっており特定できる場合などにおいては、酸素消費速度の分布の傾きを調べる必要が無く、無負荷状態になる時間の酸素消費速度を内生呼吸の酸素消費速度とすればよい。
【0093】
以上のように、本実施の形態によれば、負荷の変動幅が大きく、急激に変化する事業所等の排水処理施設の曝気槽などにも適用でき、汚泥の活性度の変化にも対応可能な曝気槽の監視方法が得られる。
【0094】
(実施の形態2)
図7は、本発明の曝気槽の制御方法における他の実施形態を示している。なお、実施の形態1と同様の構成や作用を有するものについては同一符号を付し、その説明を省略する。
【0095】
本実施の形態は、実施の形態1のうち無負荷状態における内生呼吸の酸素消費速度を測定する方法として、曝気槽2の流入負荷が無い日に測定するのではなく、無負荷状態を強制的に作り出す方法としたものである。
【0096】
実施の形態1においては、非稼働日や夜間などの無負荷状態が適当な頻度で現れる場合を想定しているが、事業所によっては無負荷状態が長期間得られない場合や、全く得られない場合も考えられる。
【0097】
このような場合は内生呼吸の酸素消費速度が更新できなくなり汚泥の活性度の変化による影響に追随できなくなり内生呼吸遷移点を正確に特定できなくなる。このような場合に対処するため、本実施の形態は強制的に無負荷状態を作り出し、内生呼吸の酸素消費速度を測定するものである。
【0098】
図7において、Rr計測槽11には汚泥界面計43が設置されており、汚泥界面計43の信号線は制御部12に接続されている。計測槽の下方には汚泥受槽41が設置され、Rr計測槽11の底部と配管で接続されており、配管の途中には汚泥受槽流入弁44が設置されている。また、汚泥受槽41の底部とRr計測槽の上部は配管で接続されており、配管の途中には循環ポンプ42が配置されている。
【0099】
次に本実施の形態の処理動作について説明する。
【0100】
内生呼吸の酸素消費速度を測定する場合、最も残留負荷が低いと考えられる最下流部の位置のRrサンプリングポンプ7を動作させ、そのポンプの混合液採取弁8を開いて混合液を流入口18からRr計測槽11へ流入させる。
【0101】
混合液はRr計測槽11に一定量貯留されたのち、一定時間静止させることにより重力沈降により汚泥と上澄み液に分離される。
【0102】
ここで、汚泥界面計43の信号から測定値が安定したことを判断した段階で汚泥界面計43の値がRr計測槽11の底面と一致するまで汚泥を汚泥受槽41に排出する。
【0103】
残りの上澄み液はRr計測槽流出口27から曝気槽2へ返送する。
【0104】
ここで、汚泥受槽41の汚泥は循環ポンプ42でRr計測槽11にもどし、次にRr洗浄配管25からRr計測槽11に元の混合液の量と等量となるように水道水・地下水等を供給する。次に、エアーポンプ16と撹拌機17を作動させ、計測槽散気管15によってRr計測槽11内の混合液を曝気すると同時に、DOセンサー13、温度センサー14による測定も開始する。測定開始後、制御部12へDOセンサー13、温度センサー14の測定値が一定時間ごとに逐次記録され、Rr計測槽11内の混合液のDOが曝気により上昇し、一定となったところで撹拌機17は作動させつつ、エアーポンプ16の作動を停止することにより、Rr計測槽11内の混合液の酸素消費速度をDOの減少曲線から算出する。
【0105】
ここで、上澄みを水道水や地下水等で置換せず、採取した混合液を連続曝気するだけでも無負荷状態にすることができるが、微生物による負荷の消費には長時間を要する場合もあり、上澄みを水道水や地下水等で置換することにより混合液の残留負荷を大幅に低減できるので安定段階までの曝気時間を短縮することが可能となる。
【0106】
尚、水道水や地下水は排水処理系の処理水を利用することもできるが、測定の安定性や処理水の悪化の影響を考慮すると排水処理系とは別の水道水や地下水を用いることが望ましい。
【0107】
このようにして、内生呼吸の酸素消費速度を定期的に更新し、実施の形態1と同様にして、この値を酸素消費速度の分布と比較して内生呼吸遷移点が適正な位置かどうか判断する。
【0108】
以上のように、本実施の形態によれば、負荷が常に高く、適切な頻度で無負荷状態が得られない場合であっても強制的に無負荷状態を作り出すことにより内生呼吸の酸素消費速度を得ることが出来、広く適用可能な曝気槽の制御方法が得られる。
【0109】
(実施の形態3)
汚泥容量を測定するSV計測槽30は下水試験法に従い容積1リットルで内径約65mmの円筒状の容器で構成されている。SV計測槽30の一方には発光部54が、発光部54に対向する他方には光センサー59が配置されている。
【0110】
光源52は第1の集光手段51内に配置されており、第1の集光手段51は導光手段53へ接続され、導光手段53は発光部54へと接続されている。発光部54には乱反射層56が備えてあり、導光手段53内はアクリル等の導光材料が充填されており、発光部54の発光面はSV計測槽30へ密着するようになっている。
【0111】
光センサー59はSV計測槽30へ密着するように配置された第2の集光手段58へ密着するように配置されている。光センサー59はSV計測槽30の深さ方向へ直列に複数個並べられており、光センサーの信号線60によって制御部12へと接続されている。ここで、光センサー59はフォトトランジスタ、フォトダイオード、フォトICなどである。
【0112】
また、第1の集光手段51はステンレスやメッキを施した鉄板や鏡など、光を反射する材質である。SV計測槽30の上部には曝気槽等から汚泥混合液を導入してくる汚泥混合液導入管28とSV計測槽30内を洗浄するためのSV洗浄配管26が備えてあり、SV計測槽30の下部には測定後に汚泥混合液を排出するためのSV計測槽流出口31と、SV計測槽流出口31に接続する汚泥混合液排出管28およびSV計測槽排出弁22が備えられている。
【0113】
上記構成において、汚泥容量を測定する場合、図示しない曝気槽等から水中ポンプや陸上ポンプやエアリフトポンプ等で曝気槽内の汚泥混合液をSV計測槽30へと導入してくる。SV計測槽30へと導入する汚泥混合液の量はタイマーや図示しない電磁流量計や図示しない液面レベルセンサーによって計測する。汚泥混合液をSV計測槽30へ導入後、30分間静置し、濃縮汚泥57と汚泥上澄61との界面がどの程度の高さに位置するかを測定する。
【0114】
このため、光源52を点灯し、光を第1の集光手段51によって集光し、集めた光を導光手段53によって発光部54へと導き、発光部54の乱反射層56によって光を乱反射させ導光手段53内で光を均一にした上で、発光部54から面発光させてSV計測槽30へと照射するようになっている。
【0115】
SV計測槽30内へ照射された光は濃縮汚泥57では遮られるため、光センサー59は光を検出しない。一方、汚泥上澄61では光は遮られないため、光センサー59は光を検出する。このように、光を検出する光センサー59と光を検出しない光センサー59の個数や予め設定した位置によって汚泥界面を簡単で確実に捉え、汚泥容量を測定することが可能となる。なお、静置時間(30分)は一例であり、必要に応じて数分〜数時間で設定することが可能である。
【0116】
このような構成の測定装置のため測定の精度は光センサー59の個数によって左右される。例えば、図8中では光センサー59の数は10個で等間隔に配置されているので、10%刻みで汚泥容量を測定することが可能である。ここで、光センサー59の数を20個にすると、5%刻みで汚泥容量を測定することが可能となる。活性汚泥処理維持管理の実情からすると5%刻み程度で十分に実用に耐えうる精度であるといえる。
【0117】
光センサー59の信号は信号線60によって制御部12へと伝えられる。
【0118】
汚泥容量を測定した後は、SV計測槽排出弁22を開けて、SV計測槽30内の汚泥混合液を排出し、その後SV計測槽排出弁22を閉め、SV洗浄配管26から洗浄水を導入することで、SV計測槽30内を洗浄するようになっている。ここで、洗浄水は水道水、地下水などの工業用水、排水処理施設の処理水などでよい。
【0119】
以上のような構成とすることで、光源52の光を無駄なくSV計測槽30へ照射することができ、SV計測槽30を透過した光を光センサー59で確実に検知できるようなる。また、光源52の光を発光部54から面発光させてSV計測槽30へと照射できるので、SV計測槽30を透過する光のムラも抑えることができ、光センサー59に到達する光のムラも抑えることができ、安定した光の検出が可能となる。
【0120】
ここで、光源52としては蛍光灯や白熱電球などが一般的であるが、LEDを用いるのが最もよい。LEDは電気エネルギーを直接光へと変換するため、輻射熱の発生がなく、光源52から発生する輻射熱の影響によるSV計測槽30内の汚泥混合液の対流を防ぎ、安定した汚泥容量を測定することが可能となる。
【0121】
また、光源52の発する光は可視光であればよいが、可視光の中でも赤色であるのが望ましい。赤色の光は波長が700nm程度と長いため、水中の懸濁物による光の減衰を受け難い性質を持っており、汚泥混合液中に懸濁物質が多い場合であっても確実に汚泥容量を測定することができる。
【0122】
また、光センサー59は第2の集光手段58によってSV計測槽30内から光を集めるため、汚泥混合液が着色等しており、光を透過しにくい性状のものであっても、確実に汚泥容量を測定することが可能となる。ここで、第2の集光手段58はプラスチック(アクリル等)やガラスによるレンズであり、SV計測槽30内を透過してきた光をできるだけ多く集めるために用いるものである。
【0123】
また、光センサー59は感度が最大となる波長が種類によって異なるため、光源52の光の波長にマッチした光センサー59を選定することが重要である。
【0124】
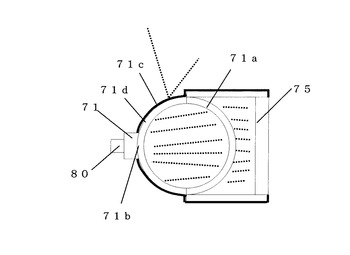
図9は本発明の図8おける汚泥容量測定装置の光センサー59部での水平断面を上側から見た構成図である。
【0125】
SV計測槽30は空気層71dを挟んで内面と外面から構成されており(簡単のため、図6では説明と共に省略)、外面・内面ともに発光部75側は発光透過部71a、光センサー80側の面は受光透過部71bのように光を透過するように透明な材質となっている。発光透過部71a、受光透過部71b以外は外面に遮光層71c(図2中で太線で示す)が備えてあり、外部からの光を反射するようになっている。
【0126】
ここで、SV計測槽30の材質はプラスチックやガラスが望ましい。また、遮光層71cは簡易的にはアルミホイルでもよいが、黒色などの下塗りをした上でシルバーや白色など光を反射し易い塗料を使用しても良い。
【0127】
このように、SV計測槽30に空気層71dを設けることで、SV計測槽30は断熱効果を有し、またSV計測槽30の外面は光を反射するようになる。このため、SV計測槽30内の汚泥混合液は外気温や輻射熱の影響を受け難く、その結果SV計測槽30内は温度分布が均一となり、SV計測槽30内の汚泥混合液は対流が発生し難くなり、気温の高・低、夜・昼などの外部環境の変化に影響を受けることなく安定して汚泥容量を測定することが可能となる。
【産業上の利用可能性】
【0128】
本発明による曝気槽制御方法は、下水処理場、事業所等における有機性排水の処理施設における曝気槽の監視に対して適用することができる。
【図面の簡単な説明】
【0129】
【図1】本発明の実施の形態1の曝気槽制御システムを示すブロック図
【図2】本発明の実施の形態1の曝気槽内における酸素消費速度の分布を示すグラフ
【図3】本発明の実施の形態1の動作を示すフローチャート
【図4】(a)は本発明の実施の形態1の曝気槽の状態を経過日時と酸素消費速度の関係で示したグラフ、(b)は同曝気槽の状態を酸素消費速度の分布で示したグラフ
【図5】(a)は本発明の実施の形態1の曝気槽の処理状態が適正な場合を示したグラフ、(b)は同曝気槽の処理が不足の場合を示したグラフ
【図6】一般的な排水処理施設における酸素消費速度の分布を示すグラフ
【図7】本発明の実施の形態2の計測制御装置を示すブロック図
【図8】本実施の形態におけるSV計測槽30を示す構成図
【図9】本発明の図6おけるSV計測槽30の断面を示す構成図
【符号の説明】
【0130】
1 調整槽
2 曝気槽
3 沈殿槽
4 散気管
5 インバーター
6 曝気ブロア
7 Rrサンプリングポンプ
8 混合液採取弁
9 SVサンプリングポンプ
10 排水処理系
11 Rr計測槽
12 制御部
13 DOセンサー
14 温度センサー
15 計測槽散気管
16 エアーポンプ
17 撹拌機
18 流入口
20 計測制御系
21 Rr計測槽排出弁
22 SV計測槽排出弁
25 Rr洗浄配管
26 SV洗浄配管
27 Rr計測槽流出口
28 汚泥混合液導入管
30 SV計測槽
31 SV計測槽流出口
41 汚泥受槽
42 循環ポンプ
43 汚泥界面計
44 汚泥受槽流入弁
51 第1の集光手段
52 光源
53 導光手段
54 発光部
56 乱反射層
57 濃縮汚泥
58 第2の集光手段
59 光センサー
60 信号線
61 汚泥上澄
71a 発光透過部
71b 受光透過部
71c 遮光層
71d 空気層
75 発光部
80 光センサー
90 表示部
【特許請求の範囲】
【請求項1】
曝気槽内における流れ方向に沿って、複数箇所の汚泥と排水の混合液の酸素消費速度分布を測定し、前記曝気槽内の汚泥の汚泥容量を測定し、測定した酸素消費速度分布と汚泥の内生呼吸の酸素消費速度を比較するとともに、測定した汚泥容量を所定値と比較することにより、汚泥による排水処理状況が適正かどうか判断し、判断した結果を外部に表示する曝気槽の監視方法。
【請求項2】
前記内生呼吸の酸素消費速度は、無負荷状態における混合液の酸素消費速度の測定値とすることを特徴とした請求項1記載の曝気槽の監視方法。
【請求項3】
前記無負荷状態は、前記曝気槽へ流入する負荷がない状態である請求項2記載の曝気槽の監視方法。
【請求項4】
前記無負荷状態は、前記曝気槽の流れ方向に沿って複数箇所で測定した酸素消費速度分布の傾きが水平の状態である請求項2記載の曝気槽の監視方法。
【請求項5】
前記無負荷状態は、前記曝気槽の流れ方向の最下流部から混合液を採取し、採取した混合液を曝気して残留負荷を全て消費させた状態である請求項2記載の曝気槽の監視方法。
【請求項6】
採取した混合液は、曝気する前に上澄みと懸濁物に分離し、上澄みを負荷のない清水で置換する請求項5記載の曝気槽の監視方法。
【請求項7】
測定した酸素消費速度が内生呼吸の酸素消費速度より低いとき、測定した酸素消費速度を内生呼吸の酸素消費速度とする請求項1記載の曝気槽の監視方法。
【請求項8】
前記汚泥容量は、前記曝気槽の流れ方向の最下流部で測定した汚泥容量であることを特徴とする請求項1記載の曝気槽の監視方法。
【請求項9】
曝気槽の流れ方向の最下流部で測定した酸素消費速度が前記内生呼吸よりも大きく、かつ、前記汚泥容量が所定値よりも大きい場合に、汚泥による排水処理が不足している、と判断する請求項1記載の曝気槽の監視方法。
【請求項10】
曝気槽の流れ方向の最下流部で測定した酸素消費速度が前記内生呼吸よりも大きく、かつ、前記汚泥容量が所定値よりも小さい場合に、汚泥による排水処理が適正である、と判断する請求項1記載の曝気槽の監視方法。
【請求項11】
曝気槽の流れ方向の最下流部で測定した酸素消費速度が内生呼吸の酸素消費速度より低く、かつ、前記汚泥容量が所定値よりも小さい場合に、測定した酸素消費速度を内生呼吸の酸素消費速度とし、汚泥による排水処理が過剰である、と判断する請求項1記載の曝気槽の監視方法。
【請求項12】
曝気槽の流れ方向の最下流部で測定した酸素消費速度が内生呼吸の酸素消費速度と等しく、かつ、前記汚泥容量が所定値よりも小さい場合に、汚泥による排水処理が過剰である、と判断する請求項1記載の曝気槽の監視方法。
【請求項13】
汚泥による排水処理状況が適正かどうかの判断は、酸素消費速度と同時にMLSSを測定して酸素利用速度係数を算出し、酸素利用速度係数を酸素利用速度の代わりに用いて行う請求項1記載の曝気槽の監視方法。
【請求項14】
汚泥による排水処理状況が適正かどうかの判断は、汚泥容量と同時にMLSSを測定して汚泥容量指標を算出し、汚泥容量指標を汚泥容量の代わりに用いて行う請求項1記載の曝気槽の監視方法。
【請求項15】
排水の処理状況を文字で表示することを特徴とする請求項1記載の曝気槽の監視方法。
【請求項16】
排水の処理状況を図で表示することを特徴とする請求項1記載の曝気槽の監視方法。
【請求項1】
曝気槽内における流れ方向に沿って、複数箇所の汚泥と排水の混合液の酸素消費速度分布を測定し、前記曝気槽内の汚泥の汚泥容量を測定し、測定した酸素消費速度分布と汚泥の内生呼吸の酸素消費速度を比較するとともに、測定した汚泥容量を所定値と比較することにより、汚泥による排水処理状況が適正かどうか判断し、判断した結果を外部に表示する曝気槽の監視方法。
【請求項2】
前記内生呼吸の酸素消費速度は、無負荷状態における混合液の酸素消費速度の測定値とすることを特徴とした請求項1記載の曝気槽の監視方法。
【請求項3】
前記無負荷状態は、前記曝気槽へ流入する負荷がない状態である請求項2記載の曝気槽の監視方法。
【請求項4】
前記無負荷状態は、前記曝気槽の流れ方向に沿って複数箇所で測定した酸素消費速度分布の傾きが水平の状態である請求項2記載の曝気槽の監視方法。
【請求項5】
前記無負荷状態は、前記曝気槽の流れ方向の最下流部から混合液を採取し、採取した混合液を曝気して残留負荷を全て消費させた状態である請求項2記載の曝気槽の監視方法。
【請求項6】
採取した混合液は、曝気する前に上澄みと懸濁物に分離し、上澄みを負荷のない清水で置換する請求項5記載の曝気槽の監視方法。
【請求項7】
測定した酸素消費速度が内生呼吸の酸素消費速度より低いとき、測定した酸素消費速度を内生呼吸の酸素消費速度とする請求項1記載の曝気槽の監視方法。
【請求項8】
前記汚泥容量は、前記曝気槽の流れ方向の最下流部で測定した汚泥容量であることを特徴とする請求項1記載の曝気槽の監視方法。
【請求項9】
曝気槽の流れ方向の最下流部で測定した酸素消費速度が前記内生呼吸よりも大きく、かつ、前記汚泥容量が所定値よりも大きい場合に、汚泥による排水処理が不足している、と判断する請求項1記載の曝気槽の監視方法。
【請求項10】
曝気槽の流れ方向の最下流部で測定した酸素消費速度が前記内生呼吸よりも大きく、かつ、前記汚泥容量が所定値よりも小さい場合に、汚泥による排水処理が適正である、と判断する請求項1記載の曝気槽の監視方法。
【請求項11】
曝気槽の流れ方向の最下流部で測定した酸素消費速度が内生呼吸の酸素消費速度より低く、かつ、前記汚泥容量が所定値よりも小さい場合に、測定した酸素消費速度を内生呼吸の酸素消費速度とし、汚泥による排水処理が過剰である、と判断する請求項1記載の曝気槽の監視方法。
【請求項12】
曝気槽の流れ方向の最下流部で測定した酸素消費速度が内生呼吸の酸素消費速度と等しく、かつ、前記汚泥容量が所定値よりも小さい場合に、汚泥による排水処理が過剰である、と判断する請求項1記載の曝気槽の監視方法。
【請求項13】
汚泥による排水処理状況が適正かどうかの判断は、酸素消費速度と同時にMLSSを測定して酸素利用速度係数を算出し、酸素利用速度係数を酸素利用速度の代わりに用いて行う請求項1記載の曝気槽の監視方法。
【請求項14】
汚泥による排水処理状況が適正かどうかの判断は、汚泥容量と同時にMLSSを測定して汚泥容量指標を算出し、汚泥容量指標を汚泥容量の代わりに用いて行う請求項1記載の曝気槽の監視方法。
【請求項15】
排水の処理状況を文字で表示することを特徴とする請求項1記載の曝気槽の監視方法。
【請求項16】
排水の処理状況を図で表示することを特徴とする請求項1記載の曝気槽の監視方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−202101(P2009−202101A)
【公開日】平成21年9月10日(2009.9.10)
【国際特許分類】
【出願番号】特願2008−47064(P2008−47064)
【出願日】平成20年2月28日(2008.2.28)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成21年9月10日(2009.9.10)
【国際特許分類】
【出願日】平成20年2月28日(2008.2.28)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]