
検出装置および鉄道車両
【課題】移動体の位置情報を低コストで検出することができる技術を提供する。
【解決手段】鉄道やエレベータかご等の移動体の位置情報を、電磁波の反射強度変化を利用して検出する。第1電波を放射する電波送信機SNDと、放射された第1電波からそれぞれの絶対位置において固有の反射強度およびその時間変化のパターンを生成する位置マーカーMKと、位置マーカーMKにより反射された第2電波を受信し、位置情報を取り出すための信号形式に変換し出力する電波受信機RCVと、電波受信機RCVの出力から位置を求めるマーカー認識装置LCCから構成される。これにより、設備コスト・メンテナンスコストの削減、1センチメートル以下の分解能での高精度な位置特定、車輪の空転・滑走に影響を受けない高信頼な位置特定が可能となる。
【解決手段】鉄道やエレベータかご等の移動体の位置情報を、電磁波の反射強度変化を利用して検出する。第1電波を放射する電波送信機SNDと、放射された第1電波からそれぞれの絶対位置において固有の反射強度およびその時間変化のパターンを生成する位置マーカーMKと、位置マーカーMKにより反射された第2電波を受信し、位置情報を取り出すための信号形式に変換し出力する電波受信機RCVと、電波受信機RCVの出力から位置を求めるマーカー認識装置LCCから構成される。これにより、設備コスト・メンテナンスコストの削減、1センチメートル以下の分解能での高精度な位置特定、車輪の空転・滑走に影響を受けない高信頼な位置特定が可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、検出装置および鉄道車両に関し、特に鉄道やエレベータ等の移動体の位置情報を検出する技術に関する。
【背景技術】
【0002】
本発明者が検討した技術として、移動体の位置情報を検出する技術においては、以下の技術が考えられる。
【0003】
例えば、鉄道輸送の分野では、運転の省力化や設備コストの低減を図る新しい鉄道システムの開発が望まれている。その実現に不可欠なのが、鉄道車両自身が現在走行している位置や速度を高精度に認識するセンサ技術である。各鉄道車両の位置を検知する方法としては、地上側装置で検知する方法と、鉄道車両側装置で検知する方法とが考えられる。現在のシステムでは、地上側装置での位置検出が一般的である。この方法では設備コストおよびメンテナンスコストがかかるため、鉄道車両側で位置を検知する装置が望まれている。
【発明の開示】
【発明が解決しようとする課題】
【0004】
現在の鉄道位置管理は、一般にトランスポンダが用いられている。トランスポンダとは、線路上の任意の地点に設置され、地上−車上間での情報伝送を行う装置である。トランスポンダは固有に付けられたID(識別情報)を発信しており、車上側では、各トランスポンダのIDとそれに対応する絶対位置を記憶しておき、鉄道車両はトランスポンダを通過した際にその位置をIDから判断するという位置確定方法が用いられている。
【0005】
しかし、この方法はコストが高くメンテナンスも必要なため、トランスポンダを数多く設置するのは困難である。また、トランスポンダだけでは鉄道車両位置を常時検知することができないため、必然的に、相対位置検知装置と組み合わせて連続的に位置検知を行うことになる。現在は、速度発電機を用いて車輪回転数を検出することで相対位置を推定しており、この方法では、空転や滑走時に数メートルの誤差が生じてしまうという問題がある。このため、高価なトランスポンダの設置数を減らすことができない状態である。
【0006】
そこで、本発明の1つの目的は、移動体の位置情報を低コストで検出することができる技術を提供することにある。
【0007】
本発明の前記並びにその他の目的と新規な特徴は、本明細書の記述及び添付図面から明らかになるであろう。
【課題を解決するための手段】
【0008】
本願において開示される実施例のうち、代表的なものの概要を簡単に説明すれば、次のとおりである。
【0009】
すなわち、代表的な実施例による検出装置は、鉄道車両・エレベータかご等の移動体に搭載され、その移動体の位置情報を検出するものである。そして、その検出装置は、第1電波を放射する電波送信機と、第1電波が物体に当たりその物体により反射された第2電波を受信する電波受信機と、第2電波の強度の変化パターンに基づいて移動体の位置情報を検出する認識装置とを有するものである。
【0010】
また、代表的な実施例による鉄道車両は、上記の検出装置を搭載したものである。
【発明の効果】
【0011】
代表的な実施例によれば、移動体の位置情報を低コストで検出することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態を図面に基づいて詳細に説明する。なお、実施の形態を説明するための全図において、同一部材には原則として同一の符号を付し、その繰り返しの説明は省略する。また、特にことわらない限り、端子名を表す記号は同時に配線名、信号名も兼ね、電源の場合はその電圧値も兼ねるものとする。
【0013】
以下の実施の形態においては便宜上その必要があるときは、複数のセクションまたは実施の形態に分割して説明するが、特に明示した場合を除き、それらは互いに無関係なものではなく、一方は他方の一部または全部の変形例、詳細、補足説明等の関係にある。また、以下の実施の形態において、要素の数等(個数、数値、量、範囲等を含む)に言及する場合、特に明示した場合および原理的に明らかに特定の数に限定される場合等を除き、その特定の数に限定されるものではなく、特定の数以上でも以下でもよい。
【0014】
(実施の形態1)
本発明は、あらゆる移動体を対象にした位置特定手段を与えるが、鉄道車両においては、例えば、定位置停止制御に対して有効である。そこで、定位置停止制御における本発明の実施形態を以下説明する。
【0015】
図1は本発明の実施の形態1による移動体位置特定システムの構成例を示すブロック図、図2は本実施の形態1の移動体位置特定システムにおいて、電波送信機・電波受信機の構成例を示すブロック図、図3は電波反射材と電波吸収材とを組み合わせた位置マーカーの構成例を示す斜視図、図4は図3の位置マーカーによる電波反射強度の変化を示す図である。
【0016】
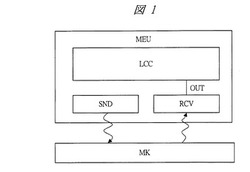
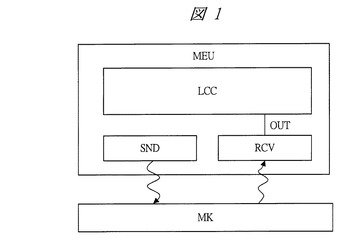
まず、図1により、本実施の形態1による移動体位置特定システムの構成の一例を説明する。本実施の形態1の移動体位置特定システムは、移動体の位置情報を検出する移動体位置検出装置MEUと、位置マーカーMKなどから構成されている。移動体位置検出装置MEUは、例えば、電波送信機SNDと、電波受信機RCVと、マーカー認識装置LCCなどから構成されている。
【0017】
電波送信機SNDは、所望の周波数の電波(第1電波)を生成し放射する。位置マーカーMKは、電波送信機SNDから放射された電波を位置固有の反射強度もしくは反射強度変化で反射する。電波受信機RCVは、位置マーカーMKから反射された電波(第2電波)を受信し、その受信信号を直流信号へ変換する。マーカー認識装置LCCは、電波受信機RCVで変換された直流信号を離散化し、反射強度変化パターンから得られるデータ列をインデックスとして、位置マーカーMKの設置位置が記された位置情報テーブルを参照し、現在位置を特定する。もしくは、マーカー認識装置LCCは、反射強度が一定周期で特定の信号レベルに達する状況において、特定の信号レベルに達した回数をカウントし、そのカウント数をインデックスとして、前記位置情報テーブルを参照し、現在位置を特定する。また、位置マーカーの反射強度変化を単に強弱の繰り返しとし、マーカー認識装置が、信号強度が弱から強となる回数をカウントして現在位置を特定する方法もある。
【0018】
本実施の形態1の移動体位置特定システムにおいて、電波送信機SND、電波受信機RCV、マーカー認識装置LCCを含む移動体位置検出装置MEUを移動体に取り付け、固定体側には、電波反射材や電波吸収材を組み合わせて固有の反射強度変化を作り出す位置マーカーMKを設置する。位置マーカーMKは、鉄道車両の軌道に沿って配置される。より具体的には、位置マーカーMKは線路上もしくは駅ホームの側壁などに固定される。移動体位置検出装置MEUは、位置マーカーMKの設置場所に応じて、適宜、鉄道車両の底面または側壁に設置する。
【0019】
なお、位置マーカーMKの設置場所については、可能であれば駅のホーム側壁が適していると考えられ、これは、地表よりも目的外の反射要因が限定されることや、鉄道車両が駅で停車する際に近接する箇所であることによる。位置マーカーMKは、停止動作の開始地点から停止位置まで側壁に沿って設置する。
【0020】
ここで、電波は1センチメートル以下の位置分解能を達成可能で、かつ環境耐性に優れているミリ波帯を用いることとする。
【0021】
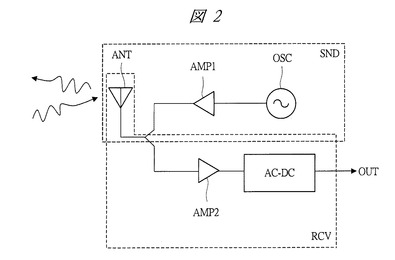
電波送信機SND、電波受信機RCVの構成が図2に示される。電波送信機SNDは、例えば76GHzなどミリ波帯の周波数信号を生成する発振器OSCと、発振器OSCの出力信号を増幅するアンプAMP1、ミリ波信号を放射するためのアンテナANTを持つ。一方、電波受信機RCVは、電波を受信するためのアンテナANT(電波送信機SNDと電波受信機RCVとで共有)、受信信号の振幅を増幅するアンプAMP2、整流平滑回路AC−DCなどから構成される。アンプAMP2で増幅された受信信号は、整流平滑回路AC−DCを通して直流信号に変換されて出力信号OUTが出力される。なお、図2では、アンテナANTは、電波送信機SNDと電波受信機RCVとで共有しているが、別々にしてもよい。
【0022】
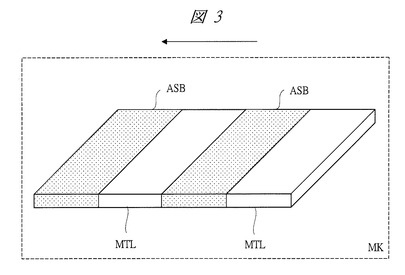
位置マーカーMKは、電波送信機SNDからの放射電波を設置位置に固有の反射強度変化で反射する。このように固有の反射強度変化を作り出すには、いくつかの方法が考えられる。一つは、電波反射材と電波吸収材を交互に組み合わせ、電波反射材を通過するときの信号強度を1と判定、電波吸収材の上を通過するときの信号強度を0と判定するように決めておくことで、反射強度変化を作り出す方法である。この方法はノイズ耐性に勝ている。他に、異なる材質の組み合わせや、異なる反射面積、反射距離など異なる形状の組み合わせなどから反射強度変化を作り出す方法も考えられる。
【0023】
上記手段により、位置マーカーが反射した固有の反射強度変化を有する信号は、電波受信機RCVから取り込まれ直流信号へ変換された後、マーカー認識装置LCCに伝達される。マーカー認識装置LCCでは、電波受信機RCVの出力信号OUTをA/D変換器を用いて数段階の階調に分ける。
【0024】
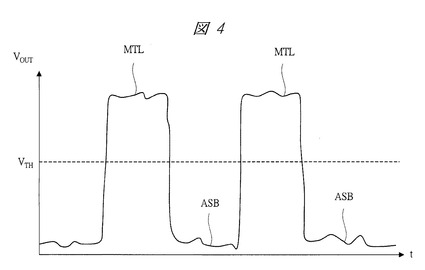
図3に、電波反射材MTLと電波吸収材ASBとを交互に組み合わせた例が示される。移動体位置検出装置MEUを搭載した移動体(鉄道車両等)が、電波を放射しながら図3の位置マーカーMK上を右から左方向へ通過すると、反射信号の強度は強、弱、強、弱、・・・と変化する。図4に、電波受信機RCVの出力信号OUTの電圧VOUTの時間変化が示される。なお、図4において、縦軸は電圧VOUT、横軸は時間tである。しきい値電圧VTHを基準に反射強度の変化を離散化できる。なお、位置マーカーMK以外にノイズとなるような反射物がない状況においては、特に反射吸収材を組み込む必要はなく、反射材のみ設置すれば十分である。
【0025】
(実施の形態2)
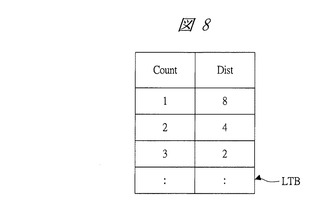
図5は本発明の実施の形態2による移動体位置特定システムの構成例を示す概略図、図6は本実施の形態2による移動体位置特定システムにおいて、電波受信機RCVの出力信号OUTの電圧変化を示す図、図7はマーカー認識装置LCCの処理手順を示すフローチャート、図8は位置情報テーブルLTBの構成例を示す図である。
【0026】
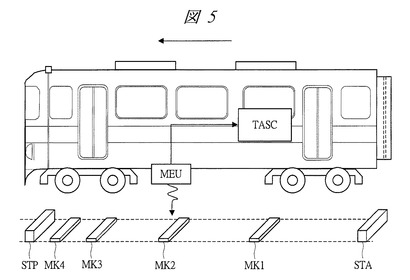
図5に、鉄道車両の定位置停止制御に本発明を適用した場合の位置特定システムの設置状態が示される。本実施の形態2の移動体位置特定システムは、定位置停止制御装置TASCと、移動体位置検出装置MEUと、位置マーカーMK1〜MK4,STA,STPなどから構成されている。定位置停止制御装置TASCと移動体位置検出装置MEUは、鉄道車両に搭載されている。移動体位置検出装置MEUは、前記実施の形態1による移動体位置検出装置MEUと同じものである。位置マーカーMK1〜MK4,STA,STPは、電波反射材で構成されている。位置マーカーMK1〜MK4,STA,STPの間には、砂利などが敷かれており電波吸収材の役目を果たしている。
【0027】
位置マーカーSTAは停止制御の開始地点、位置マーカーSTPは鉄道車両の停止地点にそれぞれ設置されており、その間の途中地点を示す他の位置マーカーMK1〜MK4とは異なる高さを持たせる。こうすることで、マーカー認識装置が位置を特定する際の基準地点を認識できる。なお、図5では位置マーカーは拡大表示しているが、実際は鉄道車両のサイズに対して非常に小さく、例えば、鉄道車両進行方向に数ミリメートルの幅を有していれば十分認識されるものである。このサイズの位置マーカーであれば、反射電波のサンプリングレートを既存のマイクロコンピュータなどで十分実現可能な数十MHz以上に設定すれば、検出を取りこぼすことはない。
【0028】
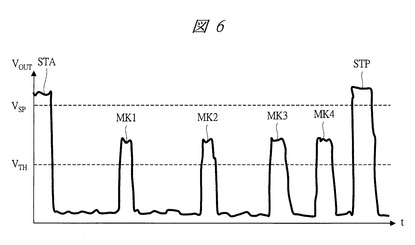
図5の位置マーカーは1種類の反射材からなるもので、移動する鉄道車両から放射された電波を反射した場合、図6に示される反射強度の変化(電波受信機RCVの出力信号OUTの電圧VOUT)が得られるものである。なお、図6において、縦軸は電圧VOUT、横軸は時間tである。この反射強度を示す電圧VOUTを位置マーカーの種類を特定するために事前に設定した図6のしきい値電圧VSP、およびしきい値電圧VTHと比較し、反射強度に従って分類することで、マーカー認識装置は各位置マーカーを認識できる。特定した位置情報は、図5に示すように移動体位置検出装置MEUから定位置停止制御装置TASCへ送られる。
【0029】
なお、図5、図6で説明した例では、各位置マーカーの設置距離は均等でなく、停止位置に近づくにつれて狭くする方法をとっている。これは、停止動作開始時と停止直前とで位置精度の要求は異なるため、本方法によって、設置コストを抑えつつ位置検出精度を向上させることが可能であるためである。
【0030】
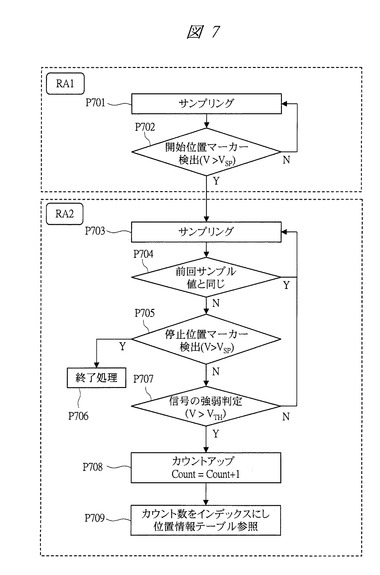
次に、図7を用いてマーカー認識装置LCCの位置特定処理手順について説明する。処理手順は、停止制御開始位置マーカーSTAを検出する処理RA1と、停止位置マーカーSTPまでの各位置マーカーを検出し、残りの距離を求める処理RA2に分けられる。それぞれの処理は、例えば、マイクロコンピュータ内のメモリにプログラムとして格納されCPUで処理される。
【0031】
まず、処理RA1について説明する。マーカー認識装置LCCは、電波受信機RCVの出力信号OUTを一定周期でサンプリングする(ステップP701)。サンプルレートは、信号変化に対して十分高い必要がある。次に、サンプリングした電圧値Vと、停止制御開始位置マーカーSTAを識別するしきい値電圧VSPとを比較し(ステップP702)、しきい値電圧VSPを上回る場合、つまり開始位置マーカーSTAを検出した場合、処理RA2に遷移する。ここで、前記判定(ステップP702)は、1サンプルのみで行わず、複数サンプル期間で継続してしきい値電圧VSPを上回った場合としてもよい。停止制御開始位置マーカーSTAを検出するまで、前記処理RA1を繰り返す。
【0032】
次に、処理RA2を説明する。マーカー認識装置LCCは、電波受信機RCVの出力信号OUTを一定周期でサンプリングし(ステップP703)、サンプル電圧値Vを前回のサンプル電圧値と比較する(ステップP704)。前回のサンプル電圧値と同じ場合は前の処理(ステップP703)に戻り、異なる場合は、サンプル電圧値Vと停止位置マーカーSTPを識別するしきい値電圧VSPと比較する(ステップP705)。そして、しきい値電圧VSPを上回る、つまり、停止位置マーカーSTPを検出して停止位置への到達を認識すると、マーカー認識装置LCCは、定位置停止制御装置TASCへ到達を伝達して、位置特定処理を終了する(ステップP706)。しきい値電圧VSPを下回る場合、今度は、位置マーカーMK1〜MK4を識別できるしきい値電圧VTHとサンプル電圧値Vを比較する(ステップP707)。そして、しきい値電圧VTHを上回る、つまり位置マーカーMK1〜MK4のいずれかが検出された場合、検出済み位置マーカーのカウント数(Count)をカウントアップ(+1)する(ステップP708)。このカウント数に基づき、図8の位置情報テーブル(LTB)を参照し(ステップP709)、停止位置までの残り距離(Dist)を得て、定位置停止制御装置TASCへ伝達する。
【0033】
したがって、本実施の形態2によれば、停止位置までの距離を1センチメートル以下の誤差で検出できるようになり、定位置停止制御の精度向上を安価で高信頼に実現できる。
【0034】
(実施の形態3)
前記実施の形態1,2では、主に停止動作に関わる位置特定方法についての構成例であり、基本的には信号の立ち上り回数をカウントしておくことで、位置を特定する方法であった。
【0035】
本実施の形態3では、鉄道車両の自動運転や駅間の運行管理など既定された走行パターンに沿うための制御に関する実施形態を示す。
【0036】
図9は本発明の実施の形態3による移動体位置特定システムの構成例を示す概略図、図10は本実施の形態3による移動体位置特定システムにおいて、位置マーカーMKの構成例を示す斜視図、図11は電波受信機RCVの出力信号OUTの電圧変化を示す図、図12はマーカー認識装置LCCの処理手順を示すフローチャート、図13は位置情報テーブルLTBの構成例を示す図である。
【0037】
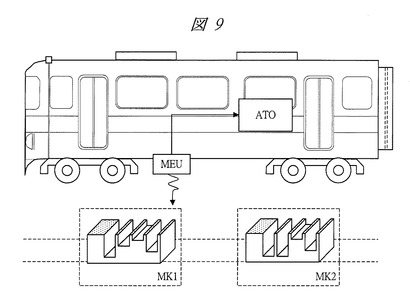
図9に、鉄道車両の自動運転制御に本発明を適用した場合の位置特定システムの設置状態が示される。本実施の形態3の移動体位置特定システムは、自動運転制御装置ATOと、移動体位置検出装置MEUと、位置マーカーMK1,MK2などから構成されている。自動運転制御装置ATOと移動体位置検出装置MEUは、鉄道車両に搭載されている。移動体位置検出装置MEUは、前記実施の形態1,2による移動体位置検出装置MEUと同じものである。
【0038】
位置マーカーMK1,MK2は、それぞれ任意の距離間隔で設置された位置マーカーを示しており、それぞれ固有の反射強度変化を有する。移動体(鉄道車両)側に取り付けられた移動体位置検出装置MEUがこれらの位置マーカーを検出し、ここで特定した位置情報を自動運転制御装置ATOへ伝達する。
【0039】
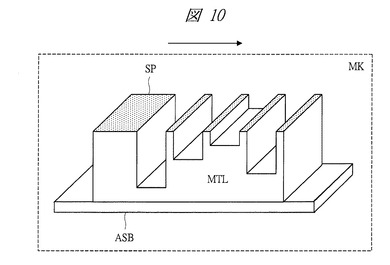
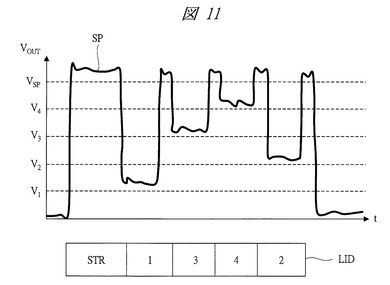
図10は、本実施の形態3で用いる4階調(2bit)4変数の情報を持つ位置マーカーMK(位置マーカーMK1,MK2に相当)の構成例が示され、図11は、位置マーカーMKによる反射強度(電波受信機RCVの出力信号OUTの電圧Vout)の変化が示される。なお、図11において、縦軸は電圧VOUT、横軸は時間tである。
【0040】
図10に示すように、位置マーカーMKは2つの反射部分から構成され、一つは、マーカー認識装置LCCが位置マーカーの開始地点を識別できるように強い反射強度が一定時間継続するよう作られた反射面(SP)、もう一つは、反射面に高低差を設けて4階調(図11のしきい値電圧V1,V2,V3,V4)の反射強度を4変数分設定された反射面である。なお、4つの変数を表すそれぞれの反射面の間には、区切りを明確にするため、反射強度の強い反射面が挿入されている。
【0041】
マーカー認識装置LCCは、図11の位置マーカーの例では、反射強度を示す電圧VOUTを4階調で離散化し、位置マーカー開始信号(STR)と、1,3,4,2の4変数からなる位置ID(LID)を検出する処理を行う。
【0042】
すなわち、マーカー認識装置LCCでは、電波受信機RCVの出力信号OUTをA/D変換器を用いて数段階の階調に分ける。識別が可能な階数は、反射強度のバラツキや周辺環境に起因するノイズの程度で限界が定まるが、4階調程度までは実現可能な範囲である。ここで、例えば4階調4変数を1つの位置マーカーと定めた場合、256地点を識別できることになる。これは、山手線なら150m以下の距離間隔で位置を特定できる計算である。
【0043】
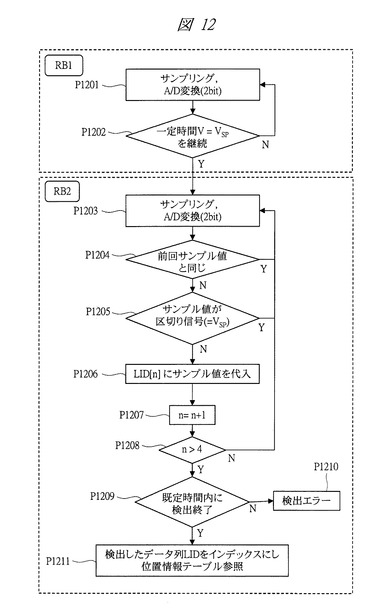
次に、図12を用いてマーカー認識装置LCCの位置特定処理手順について説明する。処理手順は、位置マーカーの存在を検出する処理RB1と、位置マーカーの反射強度変化より固有の位置情報を検出し、位置情報を得る処理RB2に分けられる。それぞれの処理は、例えば、マイクロコンピュータ内のメモリにプログラムとして格納されCPUで処理される。
【0044】
まず、処理RB1について説明する。マーカー認識装置LCCは、電波受信機RCVの出力信号OUTを一定周期でサンプリングし、例えばA/D変換機などで2bitの離散データに変換する(ステップP1201)。そして、得られたサンプル電圧値Vが一定時間継続してVSPの信号レベルが維持されているか否かを判定し(ステップP1202)、これが真、つまり位置マーカーの開始位置を示す信号を検出した場合、処理RB2へ遷移する。そうでない場合、処理RB1を繰り返す。
【0045】
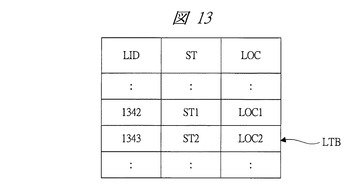
次に、処理RB2を説明する。マーカー認識装置LCCは、電波受信機RCVの出力信号OUTを一定周期でサンプリングし、A/D変換機などで2bitの離散データに変換する(ステップP1203)。前回のサンプル値と同じ場合は前の処理(ステップP1203)に戻り、異なる場合は、次に、サンプル値Vと変数間の区切り部分のしきい値電圧VSPとを比較する(ステップP1204,P1205)。これらが一致、つまり、サンプル電圧値Vが変数間の区切り部分であった場合、前の処理(ステップP1203)に戻る。一致しなかった場合は、サンプル電圧値は有効な変数データであるとして、配列LIDのn番目の変数として格納される(ステップP1206)。なお、nは初期値0で、配列に変数が加わるとカウントアップ(+1)される(ステップP1207)。このnが4を上回るまで、上記処理(ステップP1203〜P1206)が繰り返される。そして、4変数すべてが格納されると、次に、既定時間内に全ての変数データが格納されたか判定し(ステップP1209)、既定の時間を超えていた場合については、検出エラー信号を自動運転制御装置ATOへ伝達する(ステップP1210)。これは、検出漏れや誤検出により二つの位置マーカーをまたいで変数検出している可能性があるためである。既定時間内に検出終了した場合、図13に示す位置情報テーブル(LTB)を参照し(ステップP1211)、検出した変数データ列LIDと登録されているLIDを照合し、位置情報を得る。ここで、位置情報テーブル(LTB)には、次の到着駅(ST)、絶対位置(LOC)などの情報が含まれる。マーカー認識装置LCCは、これらの位置情報を自動運転制御装置ATOへ伝達する。
【0046】
したがって、本実施の形態3によれば、高い位置精度に加えて、速度発電機とトランスポンダから構成される現在の位置管理システムと比べると非常に安価でメンテナンスが容易な構成を実現できる。
【0047】
(実施の形態4)
図14は本発明の実施の形態4による移動体位置特定システムの構成例を示す概略図である。
【0048】
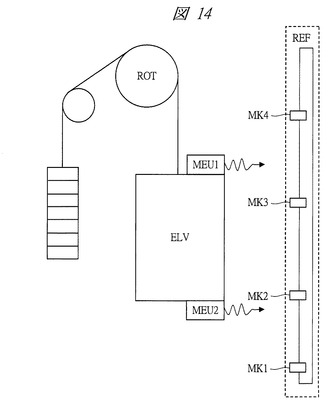
図14は、移動体としてのエレベータに本発明を適用した場合の位置特定システムの設置状態を示している。本実施の形態4の移動体位置特定システムは、エレベータかごELVに取り付けられた移動体位置検出装置MEU1,MEU2と、位置マーカーMK1〜MK4を含む反射ユニットREFなどから構成されている。移動体位置検出装置MEU1,MEU2は、前記実施の形態1〜3による移動体位置検出装置MEUと同様のものである。また、位置マーカーMK1〜MK4は、前記実施の形態1〜3による位置マーカーMKと同様のものであり、それぞれ各階に取り付けられる。
【0049】
本実施の形態4では、エレベータの位置特定を高精度かつ高信頼に行うことができる。
エレベータでは、各階で高い位置精度で停止することが要求されている。現在のエレベータかごELVの位置管理は、ロータリーエンコーダROTが用いられており、エレベータかごELVを吊り下げるロープの機械的変位をロータリーエンコーダROTで電気的なパルス信号へ変換し、そのパルス数をカウントすることで位置を検出している。
【0050】
しかし、近年、エレベータかごELVの移動速度が高速化しており、ロープのたわみによる計測誤差が大きくなる傾向にある。このように、ロータリーエンコーダROTによる間接的な測定方法では、万一ロープが切れた場合には位置が特定できなくなることもあり、エレベータかご自体の位置を直接特定する方法が望まれている。そこで、本発明の電波を利用した非接触な位置検出装置により、エレベータかごELVの位置管理の高信頼化および高精度化が期待できる。
【0051】
図14に示される移動体位置特定システムでは、移動体位置検出装置MEU1,MEU2は、移動体としてのエレベータかごELVの上下に取り付けられる。反射ユニットREFは、移動体の位置特定のために新たに取り付けてもよいが、既に各階に取り付けられているシルと呼ばれるエレベータ用敷居を用いることもできる。シルは、各階に必ず存在する金属突起であり、かつ高い位置精度で取り付けられているため、このシルを検出することで停止位置制御に利用できる。上り時には、エレベータかごELVの上に取り付けられた移動体位置検出装置MEU1で上階のシルをプレビューする。下り時には、エレベータかごELVの下に取り付けられた移動体位置検出装置MEU2で下階のシルをプレビューする。
【0052】
本実施の形態4では、前述のようにロープのたわみの影響がないため、停止位置の直前まで速度をゆるめず高速移動できる。このため、よりスピーディな昇降システムが実現できる。
【0053】
したがって、前記実施の形態1〜4の移動体位置特定システムによれば、以下の効果を得ることができる。
【0054】
(1)現在主流の位置管理方式と比べて設備コストやメンテナンスコストが削減できる。
【0055】
(2)1センチメートル以下の分解能で位置検知が可能となる。
【0056】
(3)車輪の空転・滑走やロープのたわみなどに影響を受けない高信頼な位置特定が可能となる。
【0057】
以上、本発明者によってなされた発明をその実施の形態に基づき具体的に説明したが、本発明は前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることはいうまでもない。また、前記実施の形態1〜4をそれぞれ適宜組み合わせてもよい。
【0058】
例えば、前記実施の形態1〜4においては、設置場所に関しては、移動体側に移動体位置検出装置MEUを設置し、固定体側には位置マーカーMKを設置する方法について説明したが、これに限定されるものではなく、その逆の設置方法も考えられる。
【図面の簡単な説明】
【0059】
【図1】本発明の実施の形態1による移動体位置特定システムの構成例を示すブロック図である。
【図2】本発明の実施の形態1による移動体位置特定システムにおいて、電波送信機・電波受信機の構成例を示すブロック図である。
【図3】本発明の実施の形態1による移動体位置特定システムにおいて、電波反射材と電波吸収材とを組み合わせた位置マーカーの構成例を示す斜視図である。
【図4】図3の位置マーカーによる電波反射強度の変化を示す図である。
【図5】本発明の実施の形態2による移動体位置特定システムの構成例を示す概略図である。
【図6】本発明の実施の形態2による移動体位置特定システムにおいて、電波受信機の出力信号の電圧変化を示す図である。
【図7】本発明の実施の形態2による移動体位置特定システムにおいて、マーカー認識装置の処理手順を示すフローチャートである。
【図8】本発明の実施の形態2による移動体位置特定システムにおいて、位置情報テーブルの構成例を示す図である。
【図9】本発明の実施の形態3による移動体位置特定システムの構成例を示す概略図である。
【図10】本発明の実施の形態3による移動体位置特定システムにおいて、位置マーカーの構成例を示す斜視図である。
【図11】本発明の実施の形態3による移動体位置特定システムにおいて、電波受信機の出力信号の電圧変化を示す図である。
【図12】本発明の実施の形態3による移動体位置特定システムにおいて、マーカー認識装置の処理手順を示すフローチャートである。
【図13】本発明の実施の形態3による移動体位置特定システムにおいて、位置情報テーブルの構成例を示す図である。
【図14】本発明の実施の形態4による移動体位置特定システムの構成例を示す概略図である。
【符号の説明】
【0060】
AC−DC 整流平滑回路
AMP アンプ(増幅器)
ANT アンテナ
ASB 電波吸収材
ATO 自動運転制御装置
ELV エレベータかご
LCC マーカー認識装置
LID 位置ID
LOC 位置情報
LTB 位置情報テーブル
MEU 移動体位置検出装置
MK 位置マーカー
MTL 電波反射材
OSC 発振器
OUT 電波受信機の出力信号
RCV 電波受信機
REF 反射ユニット
ROT ロータリーエンコーダ
SND 電波送信機
SP 反射強度の強い反射材
ST 駅ID
STA 停止動作開始位置の位置マーカー
STP 停止位置の位置マーカー
STR 位置IDの開始信号
TASC 定位置停止制御装置
VTH,VSP,V1,V2,V3,V4 しきい値電圧
VOUT 出力信号の電圧
【技術分野】
【0001】
本発明は、検出装置および鉄道車両に関し、特に鉄道やエレベータ等の移動体の位置情報を検出する技術に関する。
【背景技術】
【0002】
本発明者が検討した技術として、移動体の位置情報を検出する技術においては、以下の技術が考えられる。
【0003】
例えば、鉄道輸送の分野では、運転の省力化や設備コストの低減を図る新しい鉄道システムの開発が望まれている。その実現に不可欠なのが、鉄道車両自身が現在走行している位置や速度を高精度に認識するセンサ技術である。各鉄道車両の位置を検知する方法としては、地上側装置で検知する方法と、鉄道車両側装置で検知する方法とが考えられる。現在のシステムでは、地上側装置での位置検出が一般的である。この方法では設備コストおよびメンテナンスコストがかかるため、鉄道車両側で位置を検知する装置が望まれている。
【発明の開示】
【発明が解決しようとする課題】
【0004】
現在の鉄道位置管理は、一般にトランスポンダが用いられている。トランスポンダとは、線路上の任意の地点に設置され、地上−車上間での情報伝送を行う装置である。トランスポンダは固有に付けられたID(識別情報)を発信しており、車上側では、各トランスポンダのIDとそれに対応する絶対位置を記憶しておき、鉄道車両はトランスポンダを通過した際にその位置をIDから判断するという位置確定方法が用いられている。
【0005】
しかし、この方法はコストが高くメンテナンスも必要なため、トランスポンダを数多く設置するのは困難である。また、トランスポンダだけでは鉄道車両位置を常時検知することができないため、必然的に、相対位置検知装置と組み合わせて連続的に位置検知を行うことになる。現在は、速度発電機を用いて車輪回転数を検出することで相対位置を推定しており、この方法では、空転や滑走時に数メートルの誤差が生じてしまうという問題がある。このため、高価なトランスポンダの設置数を減らすことができない状態である。
【0006】
そこで、本発明の1つの目的は、移動体の位置情報を低コストで検出することができる技術を提供することにある。
【0007】
本発明の前記並びにその他の目的と新規な特徴は、本明細書の記述及び添付図面から明らかになるであろう。
【課題を解決するための手段】
【0008】
本願において開示される実施例のうち、代表的なものの概要を簡単に説明すれば、次のとおりである。
【0009】
すなわち、代表的な実施例による検出装置は、鉄道車両・エレベータかご等の移動体に搭載され、その移動体の位置情報を検出するものである。そして、その検出装置は、第1電波を放射する電波送信機と、第1電波が物体に当たりその物体により反射された第2電波を受信する電波受信機と、第2電波の強度の変化パターンに基づいて移動体の位置情報を検出する認識装置とを有するものである。
【0010】
また、代表的な実施例による鉄道車両は、上記の検出装置を搭載したものである。
【発明の効果】
【0011】
代表的な実施例によれば、移動体の位置情報を低コストで検出することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の実施の形態を図面に基づいて詳細に説明する。なお、実施の形態を説明するための全図において、同一部材には原則として同一の符号を付し、その繰り返しの説明は省略する。また、特にことわらない限り、端子名を表す記号は同時に配線名、信号名も兼ね、電源の場合はその電圧値も兼ねるものとする。
【0013】
以下の実施の形態においては便宜上その必要があるときは、複数のセクションまたは実施の形態に分割して説明するが、特に明示した場合を除き、それらは互いに無関係なものではなく、一方は他方の一部または全部の変形例、詳細、補足説明等の関係にある。また、以下の実施の形態において、要素の数等(個数、数値、量、範囲等を含む)に言及する場合、特に明示した場合および原理的に明らかに特定の数に限定される場合等を除き、その特定の数に限定されるものではなく、特定の数以上でも以下でもよい。
【0014】
(実施の形態1)
本発明は、あらゆる移動体を対象にした位置特定手段を与えるが、鉄道車両においては、例えば、定位置停止制御に対して有効である。そこで、定位置停止制御における本発明の実施形態を以下説明する。
【0015】
図1は本発明の実施の形態1による移動体位置特定システムの構成例を示すブロック図、図2は本実施の形態1の移動体位置特定システムにおいて、電波送信機・電波受信機の構成例を示すブロック図、図3は電波反射材と電波吸収材とを組み合わせた位置マーカーの構成例を示す斜視図、図4は図3の位置マーカーによる電波反射強度の変化を示す図である。
【0016】
まず、図1により、本実施の形態1による移動体位置特定システムの構成の一例を説明する。本実施の形態1の移動体位置特定システムは、移動体の位置情報を検出する移動体位置検出装置MEUと、位置マーカーMKなどから構成されている。移動体位置検出装置MEUは、例えば、電波送信機SNDと、電波受信機RCVと、マーカー認識装置LCCなどから構成されている。
【0017】
電波送信機SNDは、所望の周波数の電波(第1電波)を生成し放射する。位置マーカーMKは、電波送信機SNDから放射された電波を位置固有の反射強度もしくは反射強度変化で反射する。電波受信機RCVは、位置マーカーMKから反射された電波(第2電波)を受信し、その受信信号を直流信号へ変換する。マーカー認識装置LCCは、電波受信機RCVで変換された直流信号を離散化し、反射強度変化パターンから得られるデータ列をインデックスとして、位置マーカーMKの設置位置が記された位置情報テーブルを参照し、現在位置を特定する。もしくは、マーカー認識装置LCCは、反射強度が一定周期で特定の信号レベルに達する状況において、特定の信号レベルに達した回数をカウントし、そのカウント数をインデックスとして、前記位置情報テーブルを参照し、現在位置を特定する。また、位置マーカーの反射強度変化を単に強弱の繰り返しとし、マーカー認識装置が、信号強度が弱から強となる回数をカウントして現在位置を特定する方法もある。
【0018】
本実施の形態1の移動体位置特定システムにおいて、電波送信機SND、電波受信機RCV、マーカー認識装置LCCを含む移動体位置検出装置MEUを移動体に取り付け、固定体側には、電波反射材や電波吸収材を組み合わせて固有の反射強度変化を作り出す位置マーカーMKを設置する。位置マーカーMKは、鉄道車両の軌道に沿って配置される。より具体的には、位置マーカーMKは線路上もしくは駅ホームの側壁などに固定される。移動体位置検出装置MEUは、位置マーカーMKの設置場所に応じて、適宜、鉄道車両の底面または側壁に設置する。
【0019】
なお、位置マーカーMKの設置場所については、可能であれば駅のホーム側壁が適していると考えられ、これは、地表よりも目的外の反射要因が限定されることや、鉄道車両が駅で停車する際に近接する箇所であることによる。位置マーカーMKは、停止動作の開始地点から停止位置まで側壁に沿って設置する。
【0020】
ここで、電波は1センチメートル以下の位置分解能を達成可能で、かつ環境耐性に優れているミリ波帯を用いることとする。
【0021】
電波送信機SND、電波受信機RCVの構成が図2に示される。電波送信機SNDは、例えば76GHzなどミリ波帯の周波数信号を生成する発振器OSCと、発振器OSCの出力信号を増幅するアンプAMP1、ミリ波信号を放射するためのアンテナANTを持つ。一方、電波受信機RCVは、電波を受信するためのアンテナANT(電波送信機SNDと電波受信機RCVとで共有)、受信信号の振幅を増幅するアンプAMP2、整流平滑回路AC−DCなどから構成される。アンプAMP2で増幅された受信信号は、整流平滑回路AC−DCを通して直流信号に変換されて出力信号OUTが出力される。なお、図2では、アンテナANTは、電波送信機SNDと電波受信機RCVとで共有しているが、別々にしてもよい。
【0022】
位置マーカーMKは、電波送信機SNDからの放射電波を設置位置に固有の反射強度変化で反射する。このように固有の反射強度変化を作り出すには、いくつかの方法が考えられる。一つは、電波反射材と電波吸収材を交互に組み合わせ、電波反射材を通過するときの信号強度を1と判定、電波吸収材の上を通過するときの信号強度を0と判定するように決めておくことで、反射強度変化を作り出す方法である。この方法はノイズ耐性に勝ている。他に、異なる材質の組み合わせや、異なる反射面積、反射距離など異なる形状の組み合わせなどから反射強度変化を作り出す方法も考えられる。
【0023】
上記手段により、位置マーカーが反射した固有の反射強度変化を有する信号は、電波受信機RCVから取り込まれ直流信号へ変換された後、マーカー認識装置LCCに伝達される。マーカー認識装置LCCでは、電波受信機RCVの出力信号OUTをA/D変換器を用いて数段階の階調に分ける。
【0024】
図3に、電波反射材MTLと電波吸収材ASBとを交互に組み合わせた例が示される。移動体位置検出装置MEUを搭載した移動体(鉄道車両等)が、電波を放射しながら図3の位置マーカーMK上を右から左方向へ通過すると、反射信号の強度は強、弱、強、弱、・・・と変化する。図4に、電波受信機RCVの出力信号OUTの電圧VOUTの時間変化が示される。なお、図4において、縦軸は電圧VOUT、横軸は時間tである。しきい値電圧VTHを基準に反射強度の変化を離散化できる。なお、位置マーカーMK以外にノイズとなるような反射物がない状況においては、特に反射吸収材を組み込む必要はなく、反射材のみ設置すれば十分である。
【0025】
(実施の形態2)
図5は本発明の実施の形態2による移動体位置特定システムの構成例を示す概略図、図6は本実施の形態2による移動体位置特定システムにおいて、電波受信機RCVの出力信号OUTの電圧変化を示す図、図7はマーカー認識装置LCCの処理手順を示すフローチャート、図8は位置情報テーブルLTBの構成例を示す図である。
【0026】
図5に、鉄道車両の定位置停止制御に本発明を適用した場合の位置特定システムの設置状態が示される。本実施の形態2の移動体位置特定システムは、定位置停止制御装置TASCと、移動体位置検出装置MEUと、位置マーカーMK1〜MK4,STA,STPなどから構成されている。定位置停止制御装置TASCと移動体位置検出装置MEUは、鉄道車両に搭載されている。移動体位置検出装置MEUは、前記実施の形態1による移動体位置検出装置MEUと同じものである。位置マーカーMK1〜MK4,STA,STPは、電波反射材で構成されている。位置マーカーMK1〜MK4,STA,STPの間には、砂利などが敷かれており電波吸収材の役目を果たしている。
【0027】
位置マーカーSTAは停止制御の開始地点、位置マーカーSTPは鉄道車両の停止地点にそれぞれ設置されており、その間の途中地点を示す他の位置マーカーMK1〜MK4とは異なる高さを持たせる。こうすることで、マーカー認識装置が位置を特定する際の基準地点を認識できる。なお、図5では位置マーカーは拡大表示しているが、実際は鉄道車両のサイズに対して非常に小さく、例えば、鉄道車両進行方向に数ミリメートルの幅を有していれば十分認識されるものである。このサイズの位置マーカーであれば、反射電波のサンプリングレートを既存のマイクロコンピュータなどで十分実現可能な数十MHz以上に設定すれば、検出を取りこぼすことはない。
【0028】
図5の位置マーカーは1種類の反射材からなるもので、移動する鉄道車両から放射された電波を反射した場合、図6に示される反射強度の変化(電波受信機RCVの出力信号OUTの電圧VOUT)が得られるものである。なお、図6において、縦軸は電圧VOUT、横軸は時間tである。この反射強度を示す電圧VOUTを位置マーカーの種類を特定するために事前に設定した図6のしきい値電圧VSP、およびしきい値電圧VTHと比較し、反射強度に従って分類することで、マーカー認識装置は各位置マーカーを認識できる。特定した位置情報は、図5に示すように移動体位置検出装置MEUから定位置停止制御装置TASCへ送られる。
【0029】
なお、図5、図6で説明した例では、各位置マーカーの設置距離は均等でなく、停止位置に近づくにつれて狭くする方法をとっている。これは、停止動作開始時と停止直前とで位置精度の要求は異なるため、本方法によって、設置コストを抑えつつ位置検出精度を向上させることが可能であるためである。
【0030】
次に、図7を用いてマーカー認識装置LCCの位置特定処理手順について説明する。処理手順は、停止制御開始位置マーカーSTAを検出する処理RA1と、停止位置マーカーSTPまでの各位置マーカーを検出し、残りの距離を求める処理RA2に分けられる。それぞれの処理は、例えば、マイクロコンピュータ内のメモリにプログラムとして格納されCPUで処理される。
【0031】
まず、処理RA1について説明する。マーカー認識装置LCCは、電波受信機RCVの出力信号OUTを一定周期でサンプリングする(ステップP701)。サンプルレートは、信号変化に対して十分高い必要がある。次に、サンプリングした電圧値Vと、停止制御開始位置マーカーSTAを識別するしきい値電圧VSPとを比較し(ステップP702)、しきい値電圧VSPを上回る場合、つまり開始位置マーカーSTAを検出した場合、処理RA2に遷移する。ここで、前記判定(ステップP702)は、1サンプルのみで行わず、複数サンプル期間で継続してしきい値電圧VSPを上回った場合としてもよい。停止制御開始位置マーカーSTAを検出するまで、前記処理RA1を繰り返す。
【0032】
次に、処理RA2を説明する。マーカー認識装置LCCは、電波受信機RCVの出力信号OUTを一定周期でサンプリングし(ステップP703)、サンプル電圧値Vを前回のサンプル電圧値と比較する(ステップP704)。前回のサンプル電圧値と同じ場合は前の処理(ステップP703)に戻り、異なる場合は、サンプル電圧値Vと停止位置マーカーSTPを識別するしきい値電圧VSPと比較する(ステップP705)。そして、しきい値電圧VSPを上回る、つまり、停止位置マーカーSTPを検出して停止位置への到達を認識すると、マーカー認識装置LCCは、定位置停止制御装置TASCへ到達を伝達して、位置特定処理を終了する(ステップP706)。しきい値電圧VSPを下回る場合、今度は、位置マーカーMK1〜MK4を識別できるしきい値電圧VTHとサンプル電圧値Vを比較する(ステップP707)。そして、しきい値電圧VTHを上回る、つまり位置マーカーMK1〜MK4のいずれかが検出された場合、検出済み位置マーカーのカウント数(Count)をカウントアップ(+1)する(ステップP708)。このカウント数に基づき、図8の位置情報テーブル(LTB)を参照し(ステップP709)、停止位置までの残り距離(Dist)を得て、定位置停止制御装置TASCへ伝達する。
【0033】
したがって、本実施の形態2によれば、停止位置までの距離を1センチメートル以下の誤差で検出できるようになり、定位置停止制御の精度向上を安価で高信頼に実現できる。
【0034】
(実施の形態3)
前記実施の形態1,2では、主に停止動作に関わる位置特定方法についての構成例であり、基本的には信号の立ち上り回数をカウントしておくことで、位置を特定する方法であった。
【0035】
本実施の形態3では、鉄道車両の自動運転や駅間の運行管理など既定された走行パターンに沿うための制御に関する実施形態を示す。
【0036】
図9は本発明の実施の形態3による移動体位置特定システムの構成例を示す概略図、図10は本実施の形態3による移動体位置特定システムにおいて、位置マーカーMKの構成例を示す斜視図、図11は電波受信機RCVの出力信号OUTの電圧変化を示す図、図12はマーカー認識装置LCCの処理手順を示すフローチャート、図13は位置情報テーブルLTBの構成例を示す図である。
【0037】
図9に、鉄道車両の自動運転制御に本発明を適用した場合の位置特定システムの設置状態が示される。本実施の形態3の移動体位置特定システムは、自動運転制御装置ATOと、移動体位置検出装置MEUと、位置マーカーMK1,MK2などから構成されている。自動運転制御装置ATOと移動体位置検出装置MEUは、鉄道車両に搭載されている。移動体位置検出装置MEUは、前記実施の形態1,2による移動体位置検出装置MEUと同じものである。
【0038】
位置マーカーMK1,MK2は、それぞれ任意の距離間隔で設置された位置マーカーを示しており、それぞれ固有の反射強度変化を有する。移動体(鉄道車両)側に取り付けられた移動体位置検出装置MEUがこれらの位置マーカーを検出し、ここで特定した位置情報を自動運転制御装置ATOへ伝達する。
【0039】
図10は、本実施の形態3で用いる4階調(2bit)4変数の情報を持つ位置マーカーMK(位置マーカーMK1,MK2に相当)の構成例が示され、図11は、位置マーカーMKによる反射強度(電波受信機RCVの出力信号OUTの電圧Vout)の変化が示される。なお、図11において、縦軸は電圧VOUT、横軸は時間tである。
【0040】
図10に示すように、位置マーカーMKは2つの反射部分から構成され、一つは、マーカー認識装置LCCが位置マーカーの開始地点を識別できるように強い反射強度が一定時間継続するよう作られた反射面(SP)、もう一つは、反射面に高低差を設けて4階調(図11のしきい値電圧V1,V2,V3,V4)の反射強度を4変数分設定された反射面である。なお、4つの変数を表すそれぞれの反射面の間には、区切りを明確にするため、反射強度の強い反射面が挿入されている。
【0041】
マーカー認識装置LCCは、図11の位置マーカーの例では、反射強度を示す電圧VOUTを4階調で離散化し、位置マーカー開始信号(STR)と、1,3,4,2の4変数からなる位置ID(LID)を検出する処理を行う。
【0042】
すなわち、マーカー認識装置LCCでは、電波受信機RCVの出力信号OUTをA/D変換器を用いて数段階の階調に分ける。識別が可能な階数は、反射強度のバラツキや周辺環境に起因するノイズの程度で限界が定まるが、4階調程度までは実現可能な範囲である。ここで、例えば4階調4変数を1つの位置マーカーと定めた場合、256地点を識別できることになる。これは、山手線なら150m以下の距離間隔で位置を特定できる計算である。
【0043】
次に、図12を用いてマーカー認識装置LCCの位置特定処理手順について説明する。処理手順は、位置マーカーの存在を検出する処理RB1と、位置マーカーの反射強度変化より固有の位置情報を検出し、位置情報を得る処理RB2に分けられる。それぞれの処理は、例えば、マイクロコンピュータ内のメモリにプログラムとして格納されCPUで処理される。
【0044】
まず、処理RB1について説明する。マーカー認識装置LCCは、電波受信機RCVの出力信号OUTを一定周期でサンプリングし、例えばA/D変換機などで2bitの離散データに変換する(ステップP1201)。そして、得られたサンプル電圧値Vが一定時間継続してVSPの信号レベルが維持されているか否かを判定し(ステップP1202)、これが真、つまり位置マーカーの開始位置を示す信号を検出した場合、処理RB2へ遷移する。そうでない場合、処理RB1を繰り返す。
【0045】
次に、処理RB2を説明する。マーカー認識装置LCCは、電波受信機RCVの出力信号OUTを一定周期でサンプリングし、A/D変換機などで2bitの離散データに変換する(ステップP1203)。前回のサンプル値と同じ場合は前の処理(ステップP1203)に戻り、異なる場合は、次に、サンプル値Vと変数間の区切り部分のしきい値電圧VSPとを比較する(ステップP1204,P1205)。これらが一致、つまり、サンプル電圧値Vが変数間の区切り部分であった場合、前の処理(ステップP1203)に戻る。一致しなかった場合は、サンプル電圧値は有効な変数データであるとして、配列LIDのn番目の変数として格納される(ステップP1206)。なお、nは初期値0で、配列に変数が加わるとカウントアップ(+1)される(ステップP1207)。このnが4を上回るまで、上記処理(ステップP1203〜P1206)が繰り返される。そして、4変数すべてが格納されると、次に、既定時間内に全ての変数データが格納されたか判定し(ステップP1209)、既定の時間を超えていた場合については、検出エラー信号を自動運転制御装置ATOへ伝達する(ステップP1210)。これは、検出漏れや誤検出により二つの位置マーカーをまたいで変数検出している可能性があるためである。既定時間内に検出終了した場合、図13に示す位置情報テーブル(LTB)を参照し(ステップP1211)、検出した変数データ列LIDと登録されているLIDを照合し、位置情報を得る。ここで、位置情報テーブル(LTB)には、次の到着駅(ST)、絶対位置(LOC)などの情報が含まれる。マーカー認識装置LCCは、これらの位置情報を自動運転制御装置ATOへ伝達する。
【0046】
したがって、本実施の形態3によれば、高い位置精度に加えて、速度発電機とトランスポンダから構成される現在の位置管理システムと比べると非常に安価でメンテナンスが容易な構成を実現できる。
【0047】
(実施の形態4)
図14は本発明の実施の形態4による移動体位置特定システムの構成例を示す概略図である。
【0048】
図14は、移動体としてのエレベータに本発明を適用した場合の位置特定システムの設置状態を示している。本実施の形態4の移動体位置特定システムは、エレベータかごELVに取り付けられた移動体位置検出装置MEU1,MEU2と、位置マーカーMK1〜MK4を含む反射ユニットREFなどから構成されている。移動体位置検出装置MEU1,MEU2は、前記実施の形態1〜3による移動体位置検出装置MEUと同様のものである。また、位置マーカーMK1〜MK4は、前記実施の形態1〜3による位置マーカーMKと同様のものであり、それぞれ各階に取り付けられる。
【0049】
本実施の形態4では、エレベータの位置特定を高精度かつ高信頼に行うことができる。
エレベータでは、各階で高い位置精度で停止することが要求されている。現在のエレベータかごELVの位置管理は、ロータリーエンコーダROTが用いられており、エレベータかごELVを吊り下げるロープの機械的変位をロータリーエンコーダROTで電気的なパルス信号へ変換し、そのパルス数をカウントすることで位置を検出している。
【0050】
しかし、近年、エレベータかごELVの移動速度が高速化しており、ロープのたわみによる計測誤差が大きくなる傾向にある。このように、ロータリーエンコーダROTによる間接的な測定方法では、万一ロープが切れた場合には位置が特定できなくなることもあり、エレベータかご自体の位置を直接特定する方法が望まれている。そこで、本発明の電波を利用した非接触な位置検出装置により、エレベータかごELVの位置管理の高信頼化および高精度化が期待できる。
【0051】
図14に示される移動体位置特定システムでは、移動体位置検出装置MEU1,MEU2は、移動体としてのエレベータかごELVの上下に取り付けられる。反射ユニットREFは、移動体の位置特定のために新たに取り付けてもよいが、既に各階に取り付けられているシルと呼ばれるエレベータ用敷居を用いることもできる。シルは、各階に必ず存在する金属突起であり、かつ高い位置精度で取り付けられているため、このシルを検出することで停止位置制御に利用できる。上り時には、エレベータかごELVの上に取り付けられた移動体位置検出装置MEU1で上階のシルをプレビューする。下り時には、エレベータかごELVの下に取り付けられた移動体位置検出装置MEU2で下階のシルをプレビューする。
【0052】
本実施の形態4では、前述のようにロープのたわみの影響がないため、停止位置の直前まで速度をゆるめず高速移動できる。このため、よりスピーディな昇降システムが実現できる。
【0053】
したがって、前記実施の形態1〜4の移動体位置特定システムによれば、以下の効果を得ることができる。
【0054】
(1)現在主流の位置管理方式と比べて設備コストやメンテナンスコストが削減できる。
【0055】
(2)1センチメートル以下の分解能で位置検知が可能となる。
【0056】
(3)車輪の空転・滑走やロープのたわみなどに影響を受けない高信頼な位置特定が可能となる。
【0057】
以上、本発明者によってなされた発明をその実施の形態に基づき具体的に説明したが、本発明は前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることはいうまでもない。また、前記実施の形態1〜4をそれぞれ適宜組み合わせてもよい。
【0058】
例えば、前記実施の形態1〜4においては、設置場所に関しては、移動体側に移動体位置検出装置MEUを設置し、固定体側には位置マーカーMKを設置する方法について説明したが、これに限定されるものではなく、その逆の設置方法も考えられる。
【図面の簡単な説明】
【0059】
【図1】本発明の実施の形態1による移動体位置特定システムの構成例を示すブロック図である。
【図2】本発明の実施の形態1による移動体位置特定システムにおいて、電波送信機・電波受信機の構成例を示すブロック図である。
【図3】本発明の実施の形態1による移動体位置特定システムにおいて、電波反射材と電波吸収材とを組み合わせた位置マーカーの構成例を示す斜視図である。
【図4】図3の位置マーカーによる電波反射強度の変化を示す図である。
【図5】本発明の実施の形態2による移動体位置特定システムの構成例を示す概略図である。
【図6】本発明の実施の形態2による移動体位置特定システムにおいて、電波受信機の出力信号の電圧変化を示す図である。
【図7】本発明の実施の形態2による移動体位置特定システムにおいて、マーカー認識装置の処理手順を示すフローチャートである。
【図8】本発明の実施の形態2による移動体位置特定システムにおいて、位置情報テーブルの構成例を示す図である。
【図9】本発明の実施の形態3による移動体位置特定システムの構成例を示す概略図である。
【図10】本発明の実施の形態3による移動体位置特定システムにおいて、位置マーカーの構成例を示す斜視図である。
【図11】本発明の実施の形態3による移動体位置特定システムにおいて、電波受信機の出力信号の電圧変化を示す図である。
【図12】本発明の実施の形態3による移動体位置特定システムにおいて、マーカー認識装置の処理手順を示すフローチャートである。
【図13】本発明の実施の形態3による移動体位置特定システムにおいて、位置情報テーブルの構成例を示す図である。
【図14】本発明の実施の形態4による移動体位置特定システムの構成例を示す概略図である。
【符号の説明】
【0060】
AC−DC 整流平滑回路
AMP アンプ(増幅器)
ANT アンテナ
ASB 電波吸収材
ATO 自動運転制御装置
ELV エレベータかご
LCC マーカー認識装置
LID 位置ID
LOC 位置情報
LTB 位置情報テーブル
MEU 移動体位置検出装置
MK 位置マーカー
MTL 電波反射材
OSC 発振器
OUT 電波受信機の出力信号
RCV 電波受信機
REF 反射ユニット
ROT ロータリーエンコーダ
SND 電波送信機
SP 反射強度の強い反射材
ST 駅ID
STA 停止動作開始位置の位置マーカー
STP 停止位置の位置マーカー
STR 位置IDの開始信号
TASC 定位置停止制御装置
VTH,VSP,V1,V2,V3,V4 しきい値電圧
VOUT 出力信号の電圧
【特許請求の範囲】
【請求項1】
移動体に搭載され、前記移動体の位置情報を検出する検出装置であって、
前記検出装置は、
第1電波を放射する電波送信機と、
前記第1電波が物体に当たり前記物体により反射された第2電波を受信する電波受信機と、
前記第2電波の強度の変化パターンに基づいて前記移動体の位置情報を検出する認識装置とを有することを特徴とする検出装置。
【請求項2】
請求項1記載の検出装置において、
前記第1電波は、ミリ波帯の電磁波であることを特徴とする検出装置。
【請求項3】
請求項1記載の検出装置において、
前記電波受信機は、整流平滑回路を含み、前記整流平滑回路により前記第2電波を直流信号に変換して出力することを特徴とする検出装置。
【請求項4】
請求項1記載の検出装置において、
前記認識装置は、前記物体の設置位置情報を含む位置情報テーブルを有し、前記第2電波の強度の変化パターンと前記位置情報テーブルとを比較し、前記移動体の位置情報を検出することを特徴とする検出装置。
【請求項5】
請求項1記載の検出装置において、
前記認識装置は、前記物体の設置位置情報を含む位置情報テーブルを有し、前記第2電波の強度の変化パターンから得られるデータ列をインデックスとし、前記位置情報テーブルを参照して前記移動体の位置を特定することを特徴とする検出装置。
【請求項6】
請求項1記載の検出装置において、
前記認識装置は、前記物体の設置位置情報を含む位置情報テーブルを有し、前記第2電波の強度の変化パターンを、所定のしきい値を基準に複数の強度レベルに分類し、特定の強度レベルに分類された回数をカウントし、そのカウント数をインデックスとし、前記位置情報テーブルを参照して前記移動体の位置を特定することを特徴とする検出装置。
【請求項7】
請求項1記載の検出装置において、
前記物体は、複数の電波反射材が分離して前記移動体の軌道に沿って配置されているものであることを特徴とする検出装置。
【請求項8】
請求項1記載の検出装置において、
前記物体は、1つ以上の電波反射材と1つ以上の電波吸収材との組み合わせから成ることを特徴とする検出装置。
【請求項9】
請求項8記載の検出装置において、
前記物体は、前記電波反射材と前記電波吸収材の形状が異なる組み合わせから成ることを特徴とする検出装置。
【請求項10】
請求項1記載の検出装置において、
前記移動体は、鉄道車両又はエレベータかごであることを特徴とする検出装置。
【請求項11】
位置情報を検出する検出装置を搭載した鉄道車両であって、
前記検出装置は、
第1電波を放射する電波送信機と、
前記第1電波が物体に当たり前記物体により反射された第2電波を受信する電波受信機と、
前記第2電波の強度の変化パターンに基づいて移動体の位置情報を検出する認識装置とを有することを特徴とする鉄道車両。
【請求項12】
請求項11記載の鉄道車両において、
前記第1電波は、ミリ波帯の電磁波であることを特徴とする鉄道車両。
【請求項13】
請求項11記載の鉄道車両において、
前記電波受信機は、整流平滑回路を含み、前記整流平滑回路により前記第2電波を直流信号に変換して出力することを特徴とする鉄道車両。
【請求項14】
請求項11記載の鉄道車両において、
前記認識装置は、前記物体の設置位置情報を含む位置情報テーブルを有し、前記第2電波の強度の変化パターンと前記位置情報テーブルとを比較し、前記移動体の位置情報を検出することを特徴とする鉄道車両。
【請求項15】
請求項11記載の鉄道車両において、
前記認識装置は、前記物体の設置位置情報を含む位置情報テーブルを有し、前記第2電波の強度の変化パターンから得られるデータ列をインデックスとし、前記位置情報テーブルを参照して前記移動体の位置を特定することを特徴とする鉄道車両。
【請求項16】
請求項11記載の鉄道車両において、
前記認識装置は、前記物体の設置位置情報を含む位置情報テーブルを有し、前記第2電波の強度の変化パターンを、所定のしきい値を基準に複数の強度レベルに分類し、特定の強度レベルに分類された回数をカウントし、そのカウント数をインデックスとし、前記位置情報テーブルを参照して前記移動体の位置を特定することを特徴とする鉄道車両。
【請求項17】
請求項11記載の鉄道車両において、
前記物体は、複数の電波反射材が分離して前記移動体の軌道に沿って配置されているものであることを特徴とする鉄道車両。
【請求項18】
請求項11記載の鉄道車両において、
前記物体は、1つ以上の電波反射材と1つ以上の電波吸収材との組み合わせから成ることを特徴とする鉄道車両。
【請求項19】
請求項18記載の鉄道車両において、
前記物体は、前記電波反射材と前記電波吸収材の形状が異なる組み合わせから成ることを特徴とする鉄道車両。
【請求項1】
移動体に搭載され、前記移動体の位置情報を検出する検出装置であって、
前記検出装置は、
第1電波を放射する電波送信機と、
前記第1電波が物体に当たり前記物体により反射された第2電波を受信する電波受信機と、
前記第2電波の強度の変化パターンに基づいて前記移動体の位置情報を検出する認識装置とを有することを特徴とする検出装置。
【請求項2】
請求項1記載の検出装置において、
前記第1電波は、ミリ波帯の電磁波であることを特徴とする検出装置。
【請求項3】
請求項1記載の検出装置において、
前記電波受信機は、整流平滑回路を含み、前記整流平滑回路により前記第2電波を直流信号に変換して出力することを特徴とする検出装置。
【請求項4】
請求項1記載の検出装置において、
前記認識装置は、前記物体の設置位置情報を含む位置情報テーブルを有し、前記第2電波の強度の変化パターンと前記位置情報テーブルとを比較し、前記移動体の位置情報を検出することを特徴とする検出装置。
【請求項5】
請求項1記載の検出装置において、
前記認識装置は、前記物体の設置位置情報を含む位置情報テーブルを有し、前記第2電波の強度の変化パターンから得られるデータ列をインデックスとし、前記位置情報テーブルを参照して前記移動体の位置を特定することを特徴とする検出装置。
【請求項6】
請求項1記載の検出装置において、
前記認識装置は、前記物体の設置位置情報を含む位置情報テーブルを有し、前記第2電波の強度の変化パターンを、所定のしきい値を基準に複数の強度レベルに分類し、特定の強度レベルに分類された回数をカウントし、そのカウント数をインデックスとし、前記位置情報テーブルを参照して前記移動体の位置を特定することを特徴とする検出装置。
【請求項7】
請求項1記載の検出装置において、
前記物体は、複数の電波反射材が分離して前記移動体の軌道に沿って配置されているものであることを特徴とする検出装置。
【請求項8】
請求項1記載の検出装置において、
前記物体は、1つ以上の電波反射材と1つ以上の電波吸収材との組み合わせから成ることを特徴とする検出装置。
【請求項9】
請求項8記載の検出装置において、
前記物体は、前記電波反射材と前記電波吸収材の形状が異なる組み合わせから成ることを特徴とする検出装置。
【請求項10】
請求項1記載の検出装置において、
前記移動体は、鉄道車両又はエレベータかごであることを特徴とする検出装置。
【請求項11】
位置情報を検出する検出装置を搭載した鉄道車両であって、
前記検出装置は、
第1電波を放射する電波送信機と、
前記第1電波が物体に当たり前記物体により反射された第2電波を受信する電波受信機と、
前記第2電波の強度の変化パターンに基づいて移動体の位置情報を検出する認識装置とを有することを特徴とする鉄道車両。
【請求項12】
請求項11記載の鉄道車両において、
前記第1電波は、ミリ波帯の電磁波であることを特徴とする鉄道車両。
【請求項13】
請求項11記載の鉄道車両において、
前記電波受信機は、整流平滑回路を含み、前記整流平滑回路により前記第2電波を直流信号に変換して出力することを特徴とする鉄道車両。
【請求項14】
請求項11記載の鉄道車両において、
前記認識装置は、前記物体の設置位置情報を含む位置情報テーブルを有し、前記第2電波の強度の変化パターンと前記位置情報テーブルとを比較し、前記移動体の位置情報を検出することを特徴とする鉄道車両。
【請求項15】
請求項11記載の鉄道車両において、
前記認識装置は、前記物体の設置位置情報を含む位置情報テーブルを有し、前記第2電波の強度の変化パターンから得られるデータ列をインデックスとし、前記位置情報テーブルを参照して前記移動体の位置を特定することを特徴とする鉄道車両。
【請求項16】
請求項11記載の鉄道車両において、
前記認識装置は、前記物体の設置位置情報を含む位置情報テーブルを有し、前記第2電波の強度の変化パターンを、所定のしきい値を基準に複数の強度レベルに分類し、特定の強度レベルに分類された回数をカウントし、そのカウント数をインデックスとし、前記位置情報テーブルを参照して前記移動体の位置を特定することを特徴とする鉄道車両。
【請求項17】
請求項11記載の鉄道車両において、
前記物体は、複数の電波反射材が分離して前記移動体の軌道に沿って配置されているものであることを特徴とする鉄道車両。
【請求項18】
請求項11記載の鉄道車両において、
前記物体は、1つ以上の電波反射材と1つ以上の電波吸収材との組み合わせから成ることを特徴とする鉄道車両。
【請求項19】
請求項18記載の鉄道車両において、
前記物体は、前記電波反射材と前記電波吸収材の形状が異なる組み合わせから成ることを特徴とする鉄道車両。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2010−38607(P2010−38607A)
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願番号】特願2008−199398(P2008−199398)
【出願日】平成20年8月1日(2008.8.1)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成22年2月18日(2010.2.18)
【国際特許分類】
【出願日】平成20年8月1日(2008.8.1)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]