
歯当り測定装置
【課題】相互に噛合される一対の歯車の歯当りを客観的に且つ安定した精度で測定することが可能な歯当り測定装置を提供する。
【解決手段】リングギアに作用する反力のX方向の分力成分およびY方向の分力成分を3分力計によって測定して、測定部(演算手段)は、3分力計の測定結果を演算処理して、その結果、歯車対の歯当りを数値化して出力するので、測定部によって得られた歯当りの測定結果は、画像処理された画像に基づく測定等の作業者の主観が入る測定と比較した場合、極めて客観性が高く、且つ測定結果が安定していることから信頼性も高い。したがって、客観性が高く、且つ測定結果が安定した歯当り測定装置を提供することができる。
【解決手段】リングギアに作用する反力のX方向の分力成分およびY方向の分力成分を3分力計によって測定して、測定部(演算手段)は、3分力計の測定結果を演算処理して、その結果、歯車対の歯当りを数値化して出力するので、測定部によって得られた歯当りの測定結果は、画像処理された画像に基づく測定等の作業者の主観が入る測定と比較した場合、極めて客観性が高く、且つ測定結果が安定していることから信頼性も高い。したがって、客観性が高く、且つ測定結果が安定した歯当り測定装置を提供することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、相互に噛合される一対の歯車の歯当りを測定する装置に関する。
【背景技術】
【0002】
例えば、自動車の動力伝達系に使用される歯車対(例えば、リングギアおよびドライブピニオンギア)の歯当りを管理することは、ギアノイズの抑止、延いては、自動車の快適性を確保する上で極めて有効である。一般に、リングギアとドライブピニオンギアとの歯当り(以下、必要に応じて単に歯当りという)は、作業者の目視により検査されているのが現状である。このように、歯当りは、作業者の主観に基づき検査されていたため、後工程で歯車対にギアノイズが生じた場合、ギアノイズと歯当りとの因果関係を明らかにすることができなかった。
【0003】
そこで、特許文献1に記載の発明では、リングギアにコンパウンドを塗布した後、該リングギアとドライブピニオンギアとを噛合させることで、ドライブピニオンギアと接触した部分のコンパウンドを削り取し、コンパウンドが削り取られた部分をCCDカメラで撮像するとともにその撮像データに画像処理を施して、得られた画像データに基づいて負荷変動に伴う縦横の長さ等の大きさの変化を記録することで、歯当りの変化を数値化した。特許文献1に記載の発明では、画像処理により歯当りを数値化することが試みられたが、得られた画像データに基づき歯当りを記録して、その変化に基づき歯当りを検出するので、依然として作業者の主観が入る余地があり、その判定結果は必ずしも客観性を有しているとは言えない。また、コンパウンドの塗布状態(例えば、塗布厚)のばらつき、画像処理の精度等の問題があり、歯当りの判定の精度(信頼性)を向上させる必要がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3561902号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで本発明は、上記事情に鑑みてなされたもので、相互に噛合される一対の歯車の歯当りを客観的に且つ安定した精度で測定することが可能な歯当り測定装置を提供することを課題としてなされたものである。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の歯当り測定装置は、相互に噛合される一対の歯車の歯当りを測定する装置であって、第1歯車を回転駆動する駆動手段と、第2歯車に回転負荷を付与する負荷付与手段と、第2歯車に作用する力の分力を測定する分力計と、前記分力計によって測定された各分力の測定値を演算処理して、その演算処理結果を前記歯当りの測定値として出力する演算手段と、を含むことを特徴とする。
【発明の効果】
【0007】
本発明によれば、相互に噛合される一対の歯車の歯当りを客観的に且つ安定した精度で測定することが可能な歯当り測定装置を提供することができる。
【図面の簡単な説明】
【0008】
【図1】歯当り検査装置の概略構造を示す正面図である。
【図2】歯当り検査装置の概略構造を示す平面図である。
【図3】(a)、(b)、(c)は、歯車対の接触位置(接触点)を含むXY平面における噛合状態を概略的に示す説明図である。
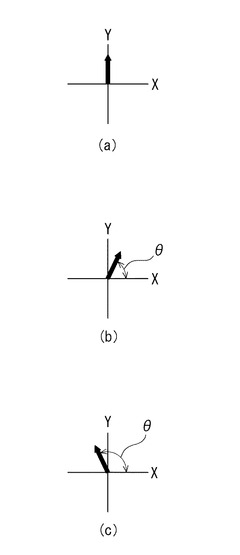
【図4】(a)、(b)、(c)は、それぞれ図3(a)、図3(b)、図3(c)の各噛合状態に対応する測定部の測定結果としての単位ベクトルを示す図である。
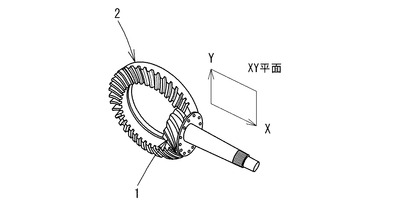
【図5】ドライブピニオンギアとリングギアとが噛合された状態を示す斜視図である。
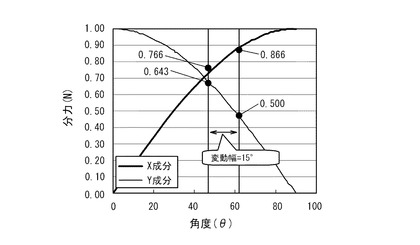
【図6】制御装置のデータテーブルに格納されたマップを示す図である。
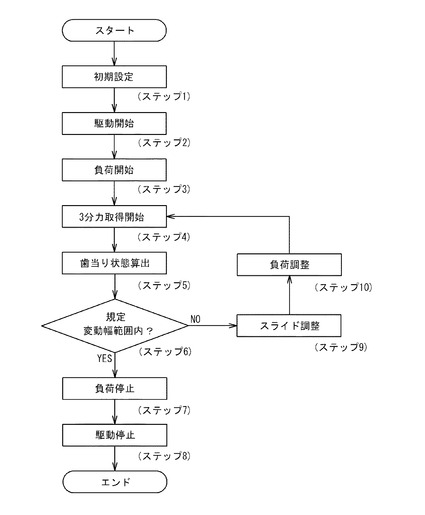
【図7】歯当り検査装置の処理を説明するフローチャートである。
【発明を実施するための形態】
【0009】
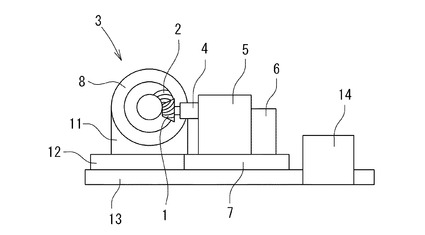
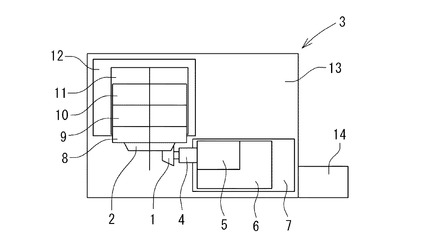
本発明の一実施形態を添付した図を参照して説明する。なお、本実施形態では、図1および図2に示されるように、歯当り測定装置が、ドライブピニオンギア1(第1歯車)とリングギア2(第2歯車)との歯当り(以下、必要に応じて単に歯当りという)を検査する歯当り検査装置3に組み込まれた態様を説明する。この態様では、後述する制御装置14(演算手段)は、歯当り測定装置の測定結果に基づいて歯当りを評価する処理を含む。また、以下の説明において、便宜上、図1における左右方向をX方向、図1における上下方向をY方向および図2における上下方向をZ方向と各方向を規定する。また、噛合された状態のドライブピニオンギア1とリングギア2とを適宜、歯車対1、2という。
【0010】
図1および図2に示されるように、歯当り検査装置3は、ドライブピニオンギア1を保持する第1保持部4と、該第1保持部4に保持されたドライブピニオンギア1をその軸線回りに回転駆動させる駆動部5(駆動手段)と、該駆動部5をY方向へ移動可能(位置決め可能)に支持する第1コラム6と、該第1コラム6を支持する第1テーブル7と、を有する。
【0011】
また、歯当り検査装置3は、リングギア2を保持する第2保持部8と、該第2保持部8に保持されたリングギア2がその軸線回りに回転可能なように第2保持部8を支持する軸受部9と、作用ロッドが第2保持部9に連結される3分力計10(分力計)と、第2保持部8、軸受部9および3分力計10をY方向へ移動可能(位置決め可能)に支持する第2コラム11と、該第2コラム11を支持する第2テーブル12と、を有する。なお、軸受部9は、例えば、電動モータとブレーキとによって構成されてリングギア2に回転負荷を付与する、すなわち、駆動部5の回転駆動力に対する負荷となる負荷部(負荷付与手段)を含む。
【0012】
歯当り検査装置3は、第1テーブル7をX方向へ移動可能(位置決め可能)に支持するとともに第2テーブル12をZ方向へ移動可能(位置決め可能)に支持するベース13を有する。なお、第1コラム6、第2コラム11、第1テーブル7ならびに第2テーブル12を駆動する機構については、従来技術を適宜適用するものとし、ここではその詳細な説明を省略する。
【0013】
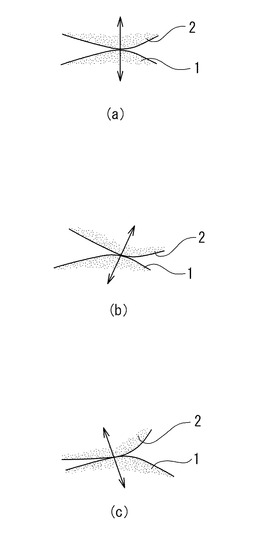
歯当り検査装置3は、3分力計10の測定結果、すなわち、3分力計10から出力された各分力の測定データを演算処理して、その結果、歯車対1、2の歯当りを数値化して測定結果として出力する測定部(演算手段)と、該測定部の測定結果に基づいて歯当りの合否を判定する判定部と、を含む制御装置14を有する。まず、測定部における処理を説明する。ここで、図5は、歯車対1、2の噛合状態を示す斜視図である。また、図3は、歯車対1、2の接触位置(接触点)を含むXY平面(図5参照)における噛合状態を概略的に示す説明図である。
【0014】
歯当り検査装置3に装着されたドライブピニオンギア1とリングギア2とを規定の状態に噛合させて、負荷部によって歯車対1、2の接触位置に一定の負荷を作用させた状態で、駆動部5によってドライブピニオンギア1を回転駆動させると、図3に示されるように、歯車対1、2の噛合状態に応じて、歯車対1、2に相互に作用する反力の方向が変化する。ここで、負荷部によって歯車対1、2の接触位置に作用させる負荷を1Nに設定すると、3分力計10の測定結果に基づいて、XY平面上に、歯車対1、2の接触位置を始点とする単位ベクトル(リングギア2に作用する反力)を作成することができる。
【0015】
そして、図4に示されるように、測定部は、このXY平面上に作成された単位ベクトルの基本ベクトル(本実施形態ではX座標軸上の単位ベクトル)に対する角度θ(以下適宜、単位ベクトルの角度θという)を測定結果として数値化して出力する。なお、図4(a)、図4(b)、図4(c)の各単位ベクトルは、それぞれ図3(a)、図3(b)、図3(c)の各噛合状態に対応する。また、単位ベクトルの角度θは、3分力計10によって測定されたX方向の分力成分をFX、Y方向の分力成分をFYとすると、以下の数式(1)により算出することができる。
θ=tan-1 ( FX / FY ) (数式1)
なお、3分力計10によってZ方向の分力成分も測定されるが、本実施形態では、測定部は、Z方向の分力成分を使用しない。
【0016】
図6は、X方向およびY方向の分力成分と単位ベクトルの角度θとの関係を表すマップである。該マップは、制御装置14のデータテーブルに記憶されている。そして、測定部は、3分力計10の測定結果、すなわち、単位ベクトルのX方向の分力成分とY方向の分力成分とを、歯車対1、2の測定対象となる歯と歯が噛み合う時点から離れる時点まで、一定の間隔(時間)でプロットするように構成されている。なお、図6において、単位ベクトルのX方向の分力成分(FX)が0.866、Y方向の分力成分(FY)が0.500である時の単位ベクトルの角度θは、59.999°である。また、図6において、単位ベクトルのX方向の分力成分(FX)が0.766、Y方向の分力成分(FY)が0.643である時の単位ベクトルの角度θは、49.989°である。
【0017】
次に、判定部における処理を説明する。判定部は、図6に示される上記マップに、各歯車1、2の諸元に応じて単位ベクトルの角度θの変動幅(図6においては15°)を設定する。そして、判定部は、判定対象となる歯車対1、2における測定部の測定結果の変動幅に基づいて歯車対1、2の歯当りを評価する。より詳細には、判定部は、測定部によって測定された単位ベクトルの角度θの変動幅が、設定された上記変動幅の範囲内であるか否かを判定して、その判定結果に基づいて歯車対1、2の歯当りを評価するように構成されている。
【0018】
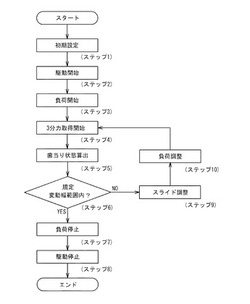
次に、本実施形態の測定部(演算手段)を含む歯当り検査装置3の処理を、図7に示されるフローチャートに基づいて説明する。
まず、ドライブピニオンギア1(第1歯車)を第1保持部4に取り付けるとともにリングギア2(第2歯車)を第2保持部8に取り付ける。次に、第1テーブル7および第2テーブル12をそれぞれX方向およびZ方向へ移動させてドライブピニオンギア1およびリングギア2を位置調整して、歯車対1、2を相対的に位置決めさせる(図7におけるステップ1)。歯車対1、2の位置決め完了後、駆動部5(駆動手段)を作動させてドライブピニオンギア1を回転駆動させる(図7におけるステップ2)。
【0019】
次に、軸受部9に組み付けられた負荷部(負荷付与手段)を作動させてリングギア2に回転負荷を付与する(図7におけるステップ3)。この状態で、検査対象(測定対象)となる歯と歯が噛み合う時点(開始位置)から離れる時点(終了位置)までのリングギア2に作用する反力のX方向の分力成分(FX)とY方向の分力成分(FY)とを、3分力計10によって一定の間隔(時間)で測定する(図7におけるステップ4)。次に、制御装置14の測定部は、3分力計10の測定結果、すなわち、X方向の分力成分(FX)およびY方向の分力成分(FY)を図6に示されるマップにプロットするとともにそれらを演算処理して、その結果、XY平面上に作成された単位ベクトルの角度θを測定結果として数値化して出力する(図7におけるステップ5)。
【0020】
一方、制御装置14の判定部は、図6に示されるマップに、各歯車1、2の諸元に応じて単位ベクトルの角度θの変動幅(図6においては15°)を設定して、測定部の測定結果の変動幅に基づいて歯車対1、2の歯当りの判定を実施する(図7におけるステップ6)。そして、測定部の測定結果の変動幅が、判定部が設定した変動幅の範囲内であった場合(ステップ6のYES)、負荷部を停止させた後(図7におけるステップ7)、駆動部5を停止させて(図7におけるステップ8)、歯当りの検査を終了する。
【0021】
なお、図7におけるステップ6において、測定部の測定結果の変動幅が、判定部が設定した変動幅の範囲外であった場合(ステップ6のNO)、スライド調整、すなわち、第1テーブル7および第2テーブル12を適宜X方向およびZ方向へ移動させてドライブピニオンギア1とリングギア2とを再度位置調整するか(図7におけるステップ9)、または負荷部が発生する負荷を調整して(図7におけるステップ10)、図7におけるステップ4の処理に戻る。
【0022】
この実施形態では以下の効果を奏する。
本実施形態によれば、リングギア2(第2歯車)に作用する反力のX方向の分力成分(FX)およびY方向の分力成分(FY)を3分力計10によって測定して、測定部(演算手段)は、3分力計10の測定結果を演算処理して、その結果、歯車対1、2の歯当りを数値化して出力するので、測定部によって得られた歯当りの測定結果は、画像処理された画像に基づく測定等の作業者の主観が入る測定と比較した場合、極めて客観性が高く、且つ測定結果が安定していることから信頼性も高い。したがって、客観性が高く、且つ測定結果が安定した歯当り測定装置を提供することができる。
【0023】
なお、実施形態は上記に限定されるものではなく、例えば、次のように構成することができる。
図7に示されるフローチャートにおいて、ステップ2とステップ3、ステップ7とステップ8は、それぞれ順序を逆にすることができる。
本実施形態では、測定部を歯当り検査装置に作用した場合について説明したが、例えば、歯車対の伝達誤差測定装置等、他の歯車対検査装置に採用することができる。
本実施形態の歯当り検査装置による検査後の工程で、例えば、研削の追加工を実施する場合、測定部の測定データを使用して、研削代の調整を実施することができる。
また、測定部の測定データを使用して、歯車対の組み合わせを選択することが可能になる。
さらに、測定部の測定データを使用して、歯車対が発生する振動を制御することが可能になる。
測定部の測定データと歯面形状との間に因果関係が発見された場合、いずれか一方の測定を省略することができる。
【符号の説明】
【0024】
1 ドライブピニオンギア(第1歯車)、2 リングギア(第2歯車)、5 駆動部(駆動手段)、10 3分力計(分力計)、14 制御装置(測定部)
【技術分野】
【0001】
本発明は、相互に噛合される一対の歯車の歯当りを測定する装置に関する。
【背景技術】
【0002】
例えば、自動車の動力伝達系に使用される歯車対(例えば、リングギアおよびドライブピニオンギア)の歯当りを管理することは、ギアノイズの抑止、延いては、自動車の快適性を確保する上で極めて有効である。一般に、リングギアとドライブピニオンギアとの歯当り(以下、必要に応じて単に歯当りという)は、作業者の目視により検査されているのが現状である。このように、歯当りは、作業者の主観に基づき検査されていたため、後工程で歯車対にギアノイズが生じた場合、ギアノイズと歯当りとの因果関係を明らかにすることができなかった。
【0003】
そこで、特許文献1に記載の発明では、リングギアにコンパウンドを塗布した後、該リングギアとドライブピニオンギアとを噛合させることで、ドライブピニオンギアと接触した部分のコンパウンドを削り取し、コンパウンドが削り取られた部分をCCDカメラで撮像するとともにその撮像データに画像処理を施して、得られた画像データに基づいて負荷変動に伴う縦横の長さ等の大きさの変化を記録することで、歯当りの変化を数値化した。特許文献1に記載の発明では、画像処理により歯当りを数値化することが試みられたが、得られた画像データに基づき歯当りを記録して、その変化に基づき歯当りを検出するので、依然として作業者の主観が入る余地があり、その判定結果は必ずしも客観性を有しているとは言えない。また、コンパウンドの塗布状態(例えば、塗布厚)のばらつき、画像処理の精度等の問題があり、歯当りの判定の精度(信頼性)を向上させる必要がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3561902号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで本発明は、上記事情に鑑みてなされたもので、相互に噛合される一対の歯車の歯当りを客観的に且つ安定した精度で測定することが可能な歯当り測定装置を提供することを課題としてなされたものである。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明の歯当り測定装置は、相互に噛合される一対の歯車の歯当りを測定する装置であって、第1歯車を回転駆動する駆動手段と、第2歯車に回転負荷を付与する負荷付与手段と、第2歯車に作用する力の分力を測定する分力計と、前記分力計によって測定された各分力の測定値を演算処理して、その演算処理結果を前記歯当りの測定値として出力する演算手段と、を含むことを特徴とする。
【発明の効果】
【0007】
本発明によれば、相互に噛合される一対の歯車の歯当りを客観的に且つ安定した精度で測定することが可能な歯当り測定装置を提供することができる。
【図面の簡単な説明】
【0008】
【図1】歯当り検査装置の概略構造を示す正面図である。
【図2】歯当り検査装置の概略構造を示す平面図である。
【図3】(a)、(b)、(c)は、歯車対の接触位置(接触点)を含むXY平面における噛合状態を概略的に示す説明図である。
【図4】(a)、(b)、(c)は、それぞれ図3(a)、図3(b)、図3(c)の各噛合状態に対応する測定部の測定結果としての単位ベクトルを示す図である。
【図5】ドライブピニオンギアとリングギアとが噛合された状態を示す斜視図である。
【図6】制御装置のデータテーブルに格納されたマップを示す図である。
【図7】歯当り検査装置の処理を説明するフローチャートである。
【発明を実施するための形態】
【0009】
本発明の一実施形態を添付した図を参照して説明する。なお、本実施形態では、図1および図2に示されるように、歯当り測定装置が、ドライブピニオンギア1(第1歯車)とリングギア2(第2歯車)との歯当り(以下、必要に応じて単に歯当りという)を検査する歯当り検査装置3に組み込まれた態様を説明する。この態様では、後述する制御装置14(演算手段)は、歯当り測定装置の測定結果に基づいて歯当りを評価する処理を含む。また、以下の説明において、便宜上、図1における左右方向をX方向、図1における上下方向をY方向および図2における上下方向をZ方向と各方向を規定する。また、噛合された状態のドライブピニオンギア1とリングギア2とを適宜、歯車対1、2という。
【0010】
図1および図2に示されるように、歯当り検査装置3は、ドライブピニオンギア1を保持する第1保持部4と、該第1保持部4に保持されたドライブピニオンギア1をその軸線回りに回転駆動させる駆動部5(駆動手段)と、該駆動部5をY方向へ移動可能(位置決め可能)に支持する第1コラム6と、該第1コラム6を支持する第1テーブル7と、を有する。
【0011】
また、歯当り検査装置3は、リングギア2を保持する第2保持部8と、該第2保持部8に保持されたリングギア2がその軸線回りに回転可能なように第2保持部8を支持する軸受部9と、作用ロッドが第2保持部9に連結される3分力計10(分力計)と、第2保持部8、軸受部9および3分力計10をY方向へ移動可能(位置決め可能)に支持する第2コラム11と、該第2コラム11を支持する第2テーブル12と、を有する。なお、軸受部9は、例えば、電動モータとブレーキとによって構成されてリングギア2に回転負荷を付与する、すなわち、駆動部5の回転駆動力に対する負荷となる負荷部(負荷付与手段)を含む。
【0012】
歯当り検査装置3は、第1テーブル7をX方向へ移動可能(位置決め可能)に支持するとともに第2テーブル12をZ方向へ移動可能(位置決め可能)に支持するベース13を有する。なお、第1コラム6、第2コラム11、第1テーブル7ならびに第2テーブル12を駆動する機構については、従来技術を適宜適用するものとし、ここではその詳細な説明を省略する。
【0013】
歯当り検査装置3は、3分力計10の測定結果、すなわち、3分力計10から出力された各分力の測定データを演算処理して、その結果、歯車対1、2の歯当りを数値化して測定結果として出力する測定部(演算手段)と、該測定部の測定結果に基づいて歯当りの合否を判定する判定部と、を含む制御装置14を有する。まず、測定部における処理を説明する。ここで、図5は、歯車対1、2の噛合状態を示す斜視図である。また、図3は、歯車対1、2の接触位置(接触点)を含むXY平面(図5参照)における噛合状態を概略的に示す説明図である。
【0014】
歯当り検査装置3に装着されたドライブピニオンギア1とリングギア2とを規定の状態に噛合させて、負荷部によって歯車対1、2の接触位置に一定の負荷を作用させた状態で、駆動部5によってドライブピニオンギア1を回転駆動させると、図3に示されるように、歯車対1、2の噛合状態に応じて、歯車対1、2に相互に作用する反力の方向が変化する。ここで、負荷部によって歯車対1、2の接触位置に作用させる負荷を1Nに設定すると、3分力計10の測定結果に基づいて、XY平面上に、歯車対1、2の接触位置を始点とする単位ベクトル(リングギア2に作用する反力)を作成することができる。
【0015】
そして、図4に示されるように、測定部は、このXY平面上に作成された単位ベクトルの基本ベクトル(本実施形態ではX座標軸上の単位ベクトル)に対する角度θ(以下適宜、単位ベクトルの角度θという)を測定結果として数値化して出力する。なお、図4(a)、図4(b)、図4(c)の各単位ベクトルは、それぞれ図3(a)、図3(b)、図3(c)の各噛合状態に対応する。また、単位ベクトルの角度θは、3分力計10によって測定されたX方向の分力成分をFX、Y方向の分力成分をFYとすると、以下の数式(1)により算出することができる。
θ=tan-1 ( FX / FY ) (数式1)
なお、3分力計10によってZ方向の分力成分も測定されるが、本実施形態では、測定部は、Z方向の分力成分を使用しない。
【0016】
図6は、X方向およびY方向の分力成分と単位ベクトルの角度θとの関係を表すマップである。該マップは、制御装置14のデータテーブルに記憶されている。そして、測定部は、3分力計10の測定結果、すなわち、単位ベクトルのX方向の分力成分とY方向の分力成分とを、歯車対1、2の測定対象となる歯と歯が噛み合う時点から離れる時点まで、一定の間隔(時間)でプロットするように構成されている。なお、図6において、単位ベクトルのX方向の分力成分(FX)が0.866、Y方向の分力成分(FY)が0.500である時の単位ベクトルの角度θは、59.999°である。また、図6において、単位ベクトルのX方向の分力成分(FX)が0.766、Y方向の分力成分(FY)が0.643である時の単位ベクトルの角度θは、49.989°である。
【0017】
次に、判定部における処理を説明する。判定部は、図6に示される上記マップに、各歯車1、2の諸元に応じて単位ベクトルの角度θの変動幅(図6においては15°)を設定する。そして、判定部は、判定対象となる歯車対1、2における測定部の測定結果の変動幅に基づいて歯車対1、2の歯当りを評価する。より詳細には、判定部は、測定部によって測定された単位ベクトルの角度θの変動幅が、設定された上記変動幅の範囲内であるか否かを判定して、その判定結果に基づいて歯車対1、2の歯当りを評価するように構成されている。
【0018】
次に、本実施形態の測定部(演算手段)を含む歯当り検査装置3の処理を、図7に示されるフローチャートに基づいて説明する。
まず、ドライブピニオンギア1(第1歯車)を第1保持部4に取り付けるとともにリングギア2(第2歯車)を第2保持部8に取り付ける。次に、第1テーブル7および第2テーブル12をそれぞれX方向およびZ方向へ移動させてドライブピニオンギア1およびリングギア2を位置調整して、歯車対1、2を相対的に位置決めさせる(図7におけるステップ1)。歯車対1、2の位置決め完了後、駆動部5(駆動手段)を作動させてドライブピニオンギア1を回転駆動させる(図7におけるステップ2)。
【0019】
次に、軸受部9に組み付けられた負荷部(負荷付与手段)を作動させてリングギア2に回転負荷を付与する(図7におけるステップ3)。この状態で、検査対象(測定対象)となる歯と歯が噛み合う時点(開始位置)から離れる時点(終了位置)までのリングギア2に作用する反力のX方向の分力成分(FX)とY方向の分力成分(FY)とを、3分力計10によって一定の間隔(時間)で測定する(図7におけるステップ4)。次に、制御装置14の測定部は、3分力計10の測定結果、すなわち、X方向の分力成分(FX)およびY方向の分力成分(FY)を図6に示されるマップにプロットするとともにそれらを演算処理して、その結果、XY平面上に作成された単位ベクトルの角度θを測定結果として数値化して出力する(図7におけるステップ5)。
【0020】
一方、制御装置14の判定部は、図6に示されるマップに、各歯車1、2の諸元に応じて単位ベクトルの角度θの変動幅(図6においては15°)を設定して、測定部の測定結果の変動幅に基づいて歯車対1、2の歯当りの判定を実施する(図7におけるステップ6)。そして、測定部の測定結果の変動幅が、判定部が設定した変動幅の範囲内であった場合(ステップ6のYES)、負荷部を停止させた後(図7におけるステップ7)、駆動部5を停止させて(図7におけるステップ8)、歯当りの検査を終了する。
【0021】
なお、図7におけるステップ6において、測定部の測定結果の変動幅が、判定部が設定した変動幅の範囲外であった場合(ステップ6のNO)、スライド調整、すなわち、第1テーブル7および第2テーブル12を適宜X方向およびZ方向へ移動させてドライブピニオンギア1とリングギア2とを再度位置調整するか(図7におけるステップ9)、または負荷部が発生する負荷を調整して(図7におけるステップ10)、図7におけるステップ4の処理に戻る。
【0022】
この実施形態では以下の効果を奏する。
本実施形態によれば、リングギア2(第2歯車)に作用する反力のX方向の分力成分(FX)およびY方向の分力成分(FY)を3分力計10によって測定して、測定部(演算手段)は、3分力計10の測定結果を演算処理して、その結果、歯車対1、2の歯当りを数値化して出力するので、測定部によって得られた歯当りの測定結果は、画像処理された画像に基づく測定等の作業者の主観が入る測定と比較した場合、極めて客観性が高く、且つ測定結果が安定していることから信頼性も高い。したがって、客観性が高く、且つ測定結果が安定した歯当り測定装置を提供することができる。
【0023】
なお、実施形態は上記に限定されるものではなく、例えば、次のように構成することができる。
図7に示されるフローチャートにおいて、ステップ2とステップ3、ステップ7とステップ8は、それぞれ順序を逆にすることができる。
本実施形態では、測定部を歯当り検査装置に作用した場合について説明したが、例えば、歯車対の伝達誤差測定装置等、他の歯車対検査装置に採用することができる。
本実施形態の歯当り検査装置による検査後の工程で、例えば、研削の追加工を実施する場合、測定部の測定データを使用して、研削代の調整を実施することができる。
また、測定部の測定データを使用して、歯車対の組み合わせを選択することが可能になる。
さらに、測定部の測定データを使用して、歯車対が発生する振動を制御することが可能になる。
測定部の測定データと歯面形状との間に因果関係が発見された場合、いずれか一方の測定を省略することができる。
【符号の説明】
【0024】
1 ドライブピニオンギア(第1歯車)、2 リングギア(第2歯車)、5 駆動部(駆動手段)、10 3分力計(分力計)、14 制御装置(測定部)
【特許請求の範囲】
【請求項1】
相互に噛合される一対の歯車の歯当りを測定する装置であって、
第1歯車を回転駆動する駆動手段と、
第2歯車に回転負荷を付与する負荷付与手段と、
第2歯車に作用する力の分力を測定する分力計と、
前記分力計によって測定された各分力の測定値を演算処理して、その演算処理結果を前記歯当りの測定値として出力する演算手段と、
を含むことを特徴とする歯当り測定装置。
【請求項2】
前記演算手段は、
前記第2歯車の軸線が直交する平面上にあって前記第1歯車と前記第2歯車との接触位置を始点とする単位ベクトルを導出して、該単位ベクトルが基本ベクトルに対してなす角度を前記歯当りの測定値として出力することを特徴とする請求項1に記載の歯当り測定装置。
【請求項1】
相互に噛合される一対の歯車の歯当りを測定する装置であって、
第1歯車を回転駆動する駆動手段と、
第2歯車に回転負荷を付与する負荷付与手段と、
第2歯車に作用する力の分力を測定する分力計と、
前記分力計によって測定された各分力の測定値を演算処理して、その演算処理結果を前記歯当りの測定値として出力する演算手段と、
を含むことを特徴とする歯当り測定装置。
【請求項2】
前記演算手段は、
前記第2歯車の軸線が直交する平面上にあって前記第1歯車と前記第2歯車との接触位置を始点とする単位ベクトルを導出して、該単位ベクトルが基本ベクトルに対してなす角度を前記歯当りの測定値として出力することを特徴とする請求項1に記載の歯当り測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−88079(P2012−88079A)
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願番号】特願2010−232852(P2010−232852)
【出願日】平成22年10月15日(2010.10.15)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願日】平成22年10月15日(2010.10.15)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]