
歯車振動強制力評価装置
【課題】歯車の回転方向の振動強制力を効率的に且つ高い精度で評価することが可能な歯車振動強制力評価装置を提供する。
【解決手段】伝達トルクの変動成分を計測する系(計測系B)を、回転負荷を発生させる系(機械制御系A)と分離して構成した。これにより、計測用トルクメータ9による計測のS/N比が高められ、評価の精度を向上させることができる。また、計測系Bによって計測された歯車対2,3の伝達トルクの変動成分に基づき歯車対2,3の回転方向の振動強制力が評価されるため、歯車対2,3の噛合い伝達誤差に基づき振動強制力を評価する従来の装置と比較して、当該歯車対2,3の回転方向の振動強制力の評価を効率化することができる。
【解決手段】伝達トルクの変動成分を計測する系(計測系B)を、回転負荷を発生させる系(機械制御系A)と分離して構成した。これにより、計測用トルクメータ9による計測のS/N比が高められ、評価の精度を向上させることができる。また、計測系Bによって計測された歯車対2,3の伝達トルクの変動成分に基づき歯車対2,3の回転方向の振動強制力が評価されるため、歯車対2,3の噛合い伝達誤差に基づき振動強制力を評価する従来の装置と比較して、当該歯車対2,3の回転方向の振動強制力の評価を効率化することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、歯車振動強制力評価装置に関するもので、自動車のトランスミッション等に用いられる歯車の回転方向の振動強制力を評価する装置に関する。
【背景技術】
【0002】
一般に、自動車のトランスミッションの騒音(振動)は、トランスミッションケース(ギヤボックス)に収容された歯車の振動強制力が主原因とされている。そこで、従来、歯車の振動強制力の主成分とされる歯車対の噛合い伝達誤差を測定し、該歯車対の噛合い伝達誤差に基づき歯車の振動強制力が評価されていた。この歯車対の噛合い伝達誤差は、各歯車の回転角度変動となって表れることから、2つの回転角度検出装置(ロータリーエンコーダ)によって測定された各歯車の回転角度変動成分に基づき導出されていた。例えば、特許文献1の噛合い伝達誤差測定装置は、各歯車の回転角度変動成分を相対する各回転角度検出装置によって測定し、各回転角度検出装置の出力信号を歯車のギヤ比によって補正することで歯車対の相対的な遅角/進角が演算処理されていた。このように、従来の噛合い伝達誤差測定装置は、2つの回転角度検出装置と複雑な演算処理とを必要とするため、設備が大型化される。また、噛合い伝達誤差を高い精度で測定するには、設備の共振領域を越えた高い回転速度領域の周波数帯での試験条件に限定される。
【0003】
また、従来、各歯車の各回転軸に錘やプーリを用いてトルクを負荷した状態で、一方(駆動側)の歯車を極めて低い回転数で回転させた場合の他方(従動側)の歯車の回転角度変動を検出し、検出された回転角度変動成分に基づき歯車対の噛合い伝達誤差を測定することが行われていた。この手法では、1つの回転角度検出装置にて歯車対の噛合い伝達誤差を測定することが可能になり、複雑な演算処理を廃止することができるが、連続的な回転を再現することができないため、動特性を含めた歯車の振動強制力を評価することができない。このように、従来の歯車振動強制力評価装置は、歯車の振動強制力の主成分とされる噛合い伝達誤差を回転角度変動成分に基づき測定することに主眼が置かれており、2つの回転角度検出装置の位相差を相対的に捉える必要がある。したがって、歯車の振動強制力を効率的に且つ高い精度で評価することが困難であった。
【0004】
そこで、特許文献2には、駆動軸に装着された駆動側歯車と従動軸に装着された従動側歯車とを相互に噛合わせ、駆動軸に駆動用モータを連結すると共に従動軸にブレーキ用モータを連結しておいて、駆動用モータの駆動によって歯車対を回転させた時の従動側歯車の側面における並進方向の振動を計測し、計測された振動量から算出した噛合い時のトルクムラに基づき歯車の振動強制力を評価するトルクムラ評価装置の開示がある。このトルクムラ評価装置では、噛合い伝達誤差を噛合い周期のトルク変動として捉えることで、装置を簡素化することができると共に実機上の負荷を付与した状態における評価が可能である。しかしながら、このトルクムラ評価装置は、歯車の振動を振動測定装置によって直接計測する構造であるため、計測結果が装置全体の振動系を含んだものになり、トルク変動の計測精度に問題がある。また、このトルクムラ評価装置は、従動側歯車の並進振動量に基づきトルクムラを評価するものであり、歯車の伝達トルクの変動成分に基づき歯車の回転方向の振動強制力を評価するものではない。
【特許文献1】特開平6−74868号公報
【特許文献2】特開2005−156326号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
そこで本発明は、上記事情に鑑みてなされたもので、歯車の回転方向の振動強制力を効率的に且つ高い精度で評価することが可能な歯車振動強制力評価装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明のうち請求項1に記載の発明は、駆動側歯車と従動側歯車とが噛合わされて構成される歯車対の振動強制力を評価する装置であって、駆動側歯車に駆動用モータを接続し、従動側歯車に吸収用モータを接続し、従動側歯車と同軸上の吸収用モータ側に制御用トルクメータを設けてなる機械制御系と、従動側歯車と同軸上の吸収用モータとは反対側に、回転角度検出手段、フライホイール、及び計測用トルクメータを設けてなる計測系と、によって構成されることを特徴とする。
【0007】
請求項2に記載の発明は、請求項1に記載の歯車振動強制力評価装置において、機械制御系の従動側歯車と制御用トルクメータとの間にカップリングを設けたことを特徴とする。
【0008】
請求項3に記載の発明は、請求項1又は2に記載の歯車振動強制力評価装置において、機械制御系の駆動側歯車と同軸上の駆動用モータとは反対側にフライホイールを設けたことを特徴とする。
【0009】
請求項4に記載の発明は、請求項1又は2に記載の歯車振動強制力評価装置において、駆動側歯車と同軸上の駆動用モータとは反対側に、回転角度検出手段、フライホイール、及び駆動側計測用トルクメータを設けてなる駆動側計測系を構成したことを特徴とする。
【0010】
したがって、請求項1に記載の歯車振動強制力評価装置では、計測された伝達トルクの変動成分に基づき歯車の回転方向の振動強制力を評価することができる。また、機械制御系と計測系とを分離したことで、装置の共振や振動が計測用トルクメータの計測値に影響するのを防ぐことができる。さらに、負荷トルクに相当する静的なトルク変動が機械制御系にて完結されるため、計測系には動的な伝達トルクの変動のみが発生し、計測用トルクメータによる計測のS/N比を高めることができる。
請求項2に記載の歯車振動強制力評価装置では、歯車の振動強制力が制御用トルクメータに伝達されるのを防ぐことができる。また、吸収用モータのトルクリップル等による外乱(振動)をカップリングにより遮断することができる。
請求項3に記載の歯車振動強制力評価装置では、歯車の振動強制力が従動側歯車に集約され、計測用トルクメータによって計測される伝達トルクの変動を増幅させることができる。
請求項4に記載の歯車振動強制力評価装置では、歯車の振動強制力を2つの伝達トルクの変動成分に基づき評価することが可能になり、ケーシングの伝達感度を含めた複合的な解析を実施することができる。
【発明の効果】
【0011】
歯車の回転方向の振動強制力を効率的に且つ高い精度で評価することが可能な歯車振動強制力評価装置を提供することができる。
【発明を実施するための最良の形態】
【0012】
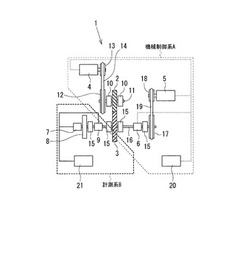
本発明の一実施形態を図1に基づいて説明する。本歯車振動強制力評価装置1は、噛合わされた歯車対2,3の回転方向の振動強制力を評価するものであって、機械制御系Aと計測系Bとに分離されて構成される。そして、機械制御系Aは、駆動側歯車2に駆動用モータ4を接続し、従動側歯車3に吸収用モータ5を接続し、従動側歯車3と同軸上の吸収用モータ5側に制御用トルクメータ6を設けて構成される。また、計測系Bは、従動側歯車3と同軸上の吸収用モータ5とは反対側に、ロータリーエンコーダ7(回転角度検出手段)、フライホイール8、及び計測用トルクメータ9を設けて構成される。これにより、本歯車振動強制力評価装置1は、計測系Bによって計測された歯車対2,3の伝達トルクの変動成分に基づき歯車対2,3の回転方向の振動強制力が評価される。また、本歯車振動強制力評価装置1は、伝達トルクの変動成分を計測する系(計測系B)を回転負荷を発生させる系(機械制御系A)と分離したことで、計測用トルクメータ9による計測のS/N比が高められる。
【0013】
機械制御系Aは、一対の軸受け10,10によって軸支された入力軸11の一端にプーリ12が装着され、該プーリ12と駆動用モータ4の回転軸に装着されたプーリ13とにプーリベルト14が巻回される。また、機械制御系Aは、4つの軸受け15によって軸支された出力軸16の一端にプーリ17が装着され、該プーリ17と吸収用モータ5の回転軸に装着されたプーリ18とにプーリベルト19が巻回される。また、機械制御系Aは、入力軸11の一対の軸受け10,10間に駆動歯車2が取り付けられると共に、出力軸16の中央の軸受け15,15間に従動歯車3が取り付けられる。さらに、機械制御系Aは、出力軸16と同軸上の吸収用モータ5側、即ち出力軸16の従動歯車3とプーリ17との間に、歯車対2,3にかかる負荷トルクが計測される制御用トルクメータ6が設けられる。
【0014】
そして、吸収用モータ5は、制御装置20によって、制御用トルクメータ6の出力信号(負荷トルクデータ)に基づきフィードバック制御される。駆動用モータ4は、制御装置20によって制御され、吸収用モータ5は、制御用トルクメータ6の出力信号(計測値)に基づき制御装置20によって制御される。なお、駆動用モータ4、吸収用モータ5、及び各軸受け10,15は、所定の防振対策がなされて(例えば、防振プレートを介して)ベースプレート上に固定される。計測系Bは、出力軸16の吸収用モータ5と反対側、即ち図1における従動歯車3の左側に構成され、出力軸16の他端にロータリーエンコーダ7が接続される。また、計測系Bは、ロータリーエンコーダ7と4つの軸受け15のうちの図1において最も左側に配置された軸受け15との間にフライホイール8が装着される。さらに、出力軸16と同軸上の従動歯車3とフライホイール8との間には計測用トルクメータ9が設けられる。
【0015】
そして、計測系Bは、ロータリーエンコーダ7によって検出された出力軸16の回転数(従動歯車3の回転数)及び計測用トルクメータ9によって計測された出力軸16のトルク変動(歯車対2,3における伝達トルク変動)に基づき、演算装置21によって歯車対2,3の伝達トルクの変動成分が算出される構造になっている。なお、演算装置21では、記憶部(マイクロコンピュータのメモリ)に記憶された歯車2,3の歯数データ、ロータリーエンコーダ7から出力された出力軸16の回転数検出データ、及び計測用トルクメータ9から出力された出力軸16のトルク変動計測データが回転次数分析処理(FFT処理)されることにより歯車対2,3の伝達トルクの変動成分が算出される。
【0016】
次に、本歯車振動強制力評価装置1の作用を説明する。まず、駆動側歯車2を入力軸11の所定位置に取り付けると共に従動側歯車3を出力軸16の所定位置に取り付ける。これにより、駆動側歯車2と従動側歯車3とが噛合わされた歯車対2,3が形成される。次に、吸収用モータ5によって出力軸16に回転負荷(負荷トルク)をかけつつ、駆動用モータ4によって入力軸11を軸心回りに回転させる。これにより、歯車対2,3がそれぞれ軸心回りに回転し、駆動側歯車2から従動側歯車3へ所定の回転トルクが伝達される。なお、本歯車振動強制力評価装置1では、制御装置20によって制御用トルクメータ6の出力信号(負荷トルクデータ)に基づき吸収用モータ5をフィードバック制御することで、歯車対2,3に一定の伝達トルクを発生させる。
【0017】
そして、トルク伝達時における出力軸16の回転数をロータリーエンコーダ7(回転角度検出手段)によって検出すると共に、歯車対2,3の伝達トルク変動を計測用トルクメータ9によって計測する。また、記憶部(マイクロコンピュータのメモリ)に記憶された歯車2,3の歯数データ、ロータリーエンコーダ7から出力された出力軸16の回転数検出データ、及び計測用トルクメータ9から出力された出力軸16のトルク変動計測データを、演算装置21によって回転次数分析処理(FFT処理)し、歯車対2,3の伝達トルクの変動成分を算出する。そして、得られた歯車対2,3の伝達トルクの変動成分に基づき当該歯車対2,3の回転方向の振動強制力を評価する。
【0018】
ここで、本歯車振動強制力評価装置1では、歯車対2,3によって発生した振動強制力が計測用トルクメータ9を介してフライホイール8に伝達される。そして、本歯車振動強制力評価装置1では、当該振動強制力に対して十分大きい慣性を有するフライホイール8を用いることにより、振動強制力はフライホイール8に入力されず、図1における従動側歯車3の左側(吸収用モータ5と反対側)の出力軸16にねじれとなって現れる。そして、本歯車振動強制力評価装置1は、該出力軸16のねじれを計測用トルクメータ9によって伝達トルク変動として計測することで、歯車対2,3の回転方向の伝達トルクの変動成分が得られる。
【0019】
この実施形態では以下の効果を奏する。
本歯車振動強制力評価装置1は、駆動側歯車2に駆動用モータ4を接続し、従動側歯車3に吸収用モータ5を接続し、従動側歯車3と同軸上の吸収用モータ5側に制御用トルクメータ6を設けてなる機械制御系Aと、従動側歯車3と同軸上の吸収用モータ5とは反対側に構成され、ロータリーエンコーダ7(回転角度検出手段)、フライホイール8、及び計測用トルクメータ9を設けてなる計測系Bと、が分離されて構成される。
したがって、本歯車振動強制力評価装置1は、伝達トルクの変動成分を計測する系(計測系B)を、回転負荷を発生させる系(機械制御系A)と分離したことで、当該装置1の共振や振動(駆動用モータ4及び吸収用モータ5のトルクリップル等)の計測用トルクメータ9への影響が排除される。これにより、計測用トルクメータ9による計測のS/N比が高められ、評価の精度を向上させることができる。
また、本歯車振動強制力評価装置1は、負荷トルクに相当する静的なトルク変動が機械制御系Aにて完結されるため、計測系Bには動的な伝達トルクの変動のみを発生させることが可能になる。これにより、計測用トルクメータ9におけるフルスケールを計測したい動的な伝達トルク変動の最大値に設定することができ、計測用トルクメータ9による計測のS/N比が高められ、評価の精度を向上させることができる。
さらに、本歯車振動強制力評価装置1は、計測系Bによって計測された歯車対2,3の伝達トルクの変動成分に基づき歯車対2,3の回転方向の振動強制力が評価されるため、歯車対2,3の噛合い伝達誤差に基づき振動強制力が評価される従来の装置と比較して、当該歯車対2,3の回転方向の振動強制力の評価を効率化することができる。
【0020】
なお、実施形態は上記に限定されるものではなく、例えば次のように構成してもよい。また、以下に示す実施形態の構成要素には、図1に示した構成要素と同じの際は同一符号を付与して詳細な説明を省略する。
(他の実施形態1)
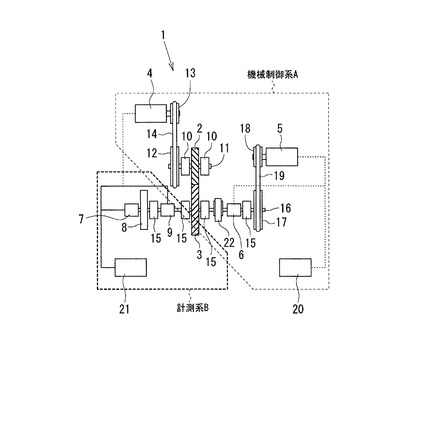
図2に示されるように、機械制御系Aにおける出力軸16の従動側歯車3と制御用トルクメータ6との間(出力軸16と同軸上の吸収用モータ5側)にカップリング22を設けて歯車振動強制力評価装置1を構成してもよい。
この場合、歯車対2,3の振動強制力が制御用トルクメータ6に伝達されるのを防ぐことができる。また、吸収用モータ5のトルクリップル等による外乱(振動)が歯車対2,3側に伝達されるのを防ぐことができる。
【0021】
(他の実施形態2)
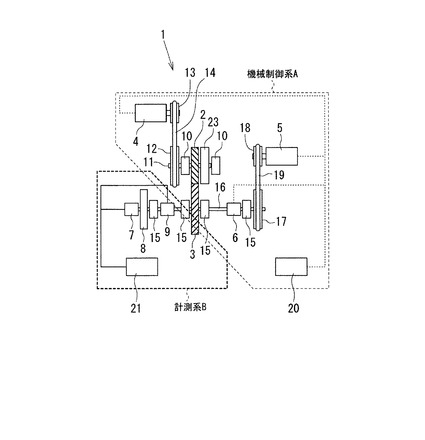
図3に示されるように、機械制御系Aにおける入力軸11の駆動用モータ4とは反対側(駆動側歯車2と同軸上の駆動用モータ4とは反対側)にフライホイール23を設けて歯車振動強制力評価装置1を構成してもよい。
この場合、歯車対2,3の振動強制力に対して十分大きい慣性を有するフライホイール23を用いることにより、振動強制力はフライホイール23に入力されず、従動側歯車3に集約され、図3における従動側歯車3の左側(吸収用モータ5と反対側)の出力軸16にねじれとなって現れる。これにより、計測用トルクメータ9によって計測される伝達トルク変動が増幅され、計測用トルクメータ9による計測のS/N比が高められ、評価の精度を向上させることができる。
また、この実施形態では、駆動側歯車2のマスター部品を入力軸11に固定することで、従動側歯車3に起因する振動強制力のみを評価することが可能になり、従動側歯車3の単体での品質保証を実現する評価装置としても用いることができる。
【0022】
(他の実施形態3)
図4に示されるように、駆動側歯車2と同軸上の駆動側歯車2に対して駆動用モータ4とは反対側(図4における右側)に、ロータリーエンコーダ24(回転角度検出手段)、フライホイール23、及び駆動側計測用トルクメータ25を設けてなる駆動側計測系Cを構成して歯車振動強制力評価装置1を構成してもよい。
この場合、歯車対2,3の振動強制力を、計測系B及び計測系Cによって得られた2つの伝達トルクの変動成分に基づき評価することが可能になり、ケーシング(例えば、歯車対2,3が収容されるトランスミッションケース)の伝達感度を含めた複合的な解析を実施することができる。
【図面の簡単な説明】
【0023】
【図1】本実施形態の歯車振動強制力評価装置の説明図である。
【図2】他の実施形態1の歯車振動強制力評価装置の説明図であって、出力軸と同軸上の吸収用モータ側にカップリングを設けてなる歯車振動強制力評価装置の図である。
【図3】他の実施形態2の歯車振動強制力評価装置の説明図であって、駆動側歯車と同軸上の駆動用モータとは反対側にフライホイールを設けてなる歯車振動強制力評価装置の図である。
【図4】他の実施形態3の歯車振動強制力評価装置の説明図であって、駆動側歯車と同軸上の駆動用モータとは反対側に計測系Cを設けてなる歯車振動強制力評価装置の図である。
【符号の説明】
【0024】
1 歯車振動強制力評価装置、2 駆動側歯車、3 従動側歯車、4 駆動用モータ、5 吸収用モータ、6 制御用トルクメータ、7 ロータリーエンコーダ(回転角度検出手段)、8 フライホイール、9 計測用トルクメータ
【技術分野】
【0001】
本発明は、歯車振動強制力評価装置に関するもので、自動車のトランスミッション等に用いられる歯車の回転方向の振動強制力を評価する装置に関する。
【背景技術】
【0002】
一般に、自動車のトランスミッションの騒音(振動)は、トランスミッションケース(ギヤボックス)に収容された歯車の振動強制力が主原因とされている。そこで、従来、歯車の振動強制力の主成分とされる歯車対の噛合い伝達誤差を測定し、該歯車対の噛合い伝達誤差に基づき歯車の振動強制力が評価されていた。この歯車対の噛合い伝達誤差は、各歯車の回転角度変動となって表れることから、2つの回転角度検出装置(ロータリーエンコーダ)によって測定された各歯車の回転角度変動成分に基づき導出されていた。例えば、特許文献1の噛合い伝達誤差測定装置は、各歯車の回転角度変動成分を相対する各回転角度検出装置によって測定し、各回転角度検出装置の出力信号を歯車のギヤ比によって補正することで歯車対の相対的な遅角/進角が演算処理されていた。このように、従来の噛合い伝達誤差測定装置は、2つの回転角度検出装置と複雑な演算処理とを必要とするため、設備が大型化される。また、噛合い伝達誤差を高い精度で測定するには、設備の共振領域を越えた高い回転速度領域の周波数帯での試験条件に限定される。
【0003】
また、従来、各歯車の各回転軸に錘やプーリを用いてトルクを負荷した状態で、一方(駆動側)の歯車を極めて低い回転数で回転させた場合の他方(従動側)の歯車の回転角度変動を検出し、検出された回転角度変動成分に基づき歯車対の噛合い伝達誤差を測定することが行われていた。この手法では、1つの回転角度検出装置にて歯車対の噛合い伝達誤差を測定することが可能になり、複雑な演算処理を廃止することができるが、連続的な回転を再現することができないため、動特性を含めた歯車の振動強制力を評価することができない。このように、従来の歯車振動強制力評価装置は、歯車の振動強制力の主成分とされる噛合い伝達誤差を回転角度変動成分に基づき測定することに主眼が置かれており、2つの回転角度検出装置の位相差を相対的に捉える必要がある。したがって、歯車の振動強制力を効率的に且つ高い精度で評価することが困難であった。
【0004】
そこで、特許文献2には、駆動軸に装着された駆動側歯車と従動軸に装着された従動側歯車とを相互に噛合わせ、駆動軸に駆動用モータを連結すると共に従動軸にブレーキ用モータを連結しておいて、駆動用モータの駆動によって歯車対を回転させた時の従動側歯車の側面における並進方向の振動を計測し、計測された振動量から算出した噛合い時のトルクムラに基づき歯車の振動強制力を評価するトルクムラ評価装置の開示がある。このトルクムラ評価装置では、噛合い伝達誤差を噛合い周期のトルク変動として捉えることで、装置を簡素化することができると共に実機上の負荷を付与した状態における評価が可能である。しかしながら、このトルクムラ評価装置は、歯車の振動を振動測定装置によって直接計測する構造であるため、計測結果が装置全体の振動系を含んだものになり、トルク変動の計測精度に問題がある。また、このトルクムラ評価装置は、従動側歯車の並進振動量に基づきトルクムラを評価するものであり、歯車の伝達トルクの変動成分に基づき歯車の回転方向の振動強制力を評価するものではない。
【特許文献1】特開平6−74868号公報
【特許文献2】特開2005−156326号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
そこで本発明は、上記事情に鑑みてなされたもので、歯車の回転方向の振動強制力を効率的に且つ高い精度で評価することが可能な歯車振動強制力評価装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明のうち請求項1に記載の発明は、駆動側歯車と従動側歯車とが噛合わされて構成される歯車対の振動強制力を評価する装置であって、駆動側歯車に駆動用モータを接続し、従動側歯車に吸収用モータを接続し、従動側歯車と同軸上の吸収用モータ側に制御用トルクメータを設けてなる機械制御系と、従動側歯車と同軸上の吸収用モータとは反対側に、回転角度検出手段、フライホイール、及び計測用トルクメータを設けてなる計測系と、によって構成されることを特徴とする。
【0007】
請求項2に記載の発明は、請求項1に記載の歯車振動強制力評価装置において、機械制御系の従動側歯車と制御用トルクメータとの間にカップリングを設けたことを特徴とする。
【0008】
請求項3に記載の発明は、請求項1又は2に記載の歯車振動強制力評価装置において、機械制御系の駆動側歯車と同軸上の駆動用モータとは反対側にフライホイールを設けたことを特徴とする。
【0009】
請求項4に記載の発明は、請求項1又は2に記載の歯車振動強制力評価装置において、駆動側歯車と同軸上の駆動用モータとは反対側に、回転角度検出手段、フライホイール、及び駆動側計測用トルクメータを設けてなる駆動側計測系を構成したことを特徴とする。
【0010】
したがって、請求項1に記載の歯車振動強制力評価装置では、計測された伝達トルクの変動成分に基づき歯車の回転方向の振動強制力を評価することができる。また、機械制御系と計測系とを分離したことで、装置の共振や振動が計測用トルクメータの計測値に影響するのを防ぐことができる。さらに、負荷トルクに相当する静的なトルク変動が機械制御系にて完結されるため、計測系には動的な伝達トルクの変動のみが発生し、計測用トルクメータによる計測のS/N比を高めることができる。
請求項2に記載の歯車振動強制力評価装置では、歯車の振動強制力が制御用トルクメータに伝達されるのを防ぐことができる。また、吸収用モータのトルクリップル等による外乱(振動)をカップリングにより遮断することができる。
請求項3に記載の歯車振動強制力評価装置では、歯車の振動強制力が従動側歯車に集約され、計測用トルクメータによって計測される伝達トルクの変動を増幅させることができる。
請求項4に記載の歯車振動強制力評価装置では、歯車の振動強制力を2つの伝達トルクの変動成分に基づき評価することが可能になり、ケーシングの伝達感度を含めた複合的な解析を実施することができる。
【発明の効果】
【0011】
歯車の回転方向の振動強制力を効率的に且つ高い精度で評価することが可能な歯車振動強制力評価装置を提供することができる。
【発明を実施するための最良の形態】
【0012】
本発明の一実施形態を図1に基づいて説明する。本歯車振動強制力評価装置1は、噛合わされた歯車対2,3の回転方向の振動強制力を評価するものであって、機械制御系Aと計測系Bとに分離されて構成される。そして、機械制御系Aは、駆動側歯車2に駆動用モータ4を接続し、従動側歯車3に吸収用モータ5を接続し、従動側歯車3と同軸上の吸収用モータ5側に制御用トルクメータ6を設けて構成される。また、計測系Bは、従動側歯車3と同軸上の吸収用モータ5とは反対側に、ロータリーエンコーダ7(回転角度検出手段)、フライホイール8、及び計測用トルクメータ9を設けて構成される。これにより、本歯車振動強制力評価装置1は、計測系Bによって計測された歯車対2,3の伝達トルクの変動成分に基づき歯車対2,3の回転方向の振動強制力が評価される。また、本歯車振動強制力評価装置1は、伝達トルクの変動成分を計測する系(計測系B)を回転負荷を発生させる系(機械制御系A)と分離したことで、計測用トルクメータ9による計測のS/N比が高められる。
【0013】
機械制御系Aは、一対の軸受け10,10によって軸支された入力軸11の一端にプーリ12が装着され、該プーリ12と駆動用モータ4の回転軸に装着されたプーリ13とにプーリベルト14が巻回される。また、機械制御系Aは、4つの軸受け15によって軸支された出力軸16の一端にプーリ17が装着され、該プーリ17と吸収用モータ5の回転軸に装着されたプーリ18とにプーリベルト19が巻回される。また、機械制御系Aは、入力軸11の一対の軸受け10,10間に駆動歯車2が取り付けられると共に、出力軸16の中央の軸受け15,15間に従動歯車3が取り付けられる。さらに、機械制御系Aは、出力軸16と同軸上の吸収用モータ5側、即ち出力軸16の従動歯車3とプーリ17との間に、歯車対2,3にかかる負荷トルクが計測される制御用トルクメータ6が設けられる。
【0014】
そして、吸収用モータ5は、制御装置20によって、制御用トルクメータ6の出力信号(負荷トルクデータ)に基づきフィードバック制御される。駆動用モータ4は、制御装置20によって制御され、吸収用モータ5は、制御用トルクメータ6の出力信号(計測値)に基づき制御装置20によって制御される。なお、駆動用モータ4、吸収用モータ5、及び各軸受け10,15は、所定の防振対策がなされて(例えば、防振プレートを介して)ベースプレート上に固定される。計測系Bは、出力軸16の吸収用モータ5と反対側、即ち図1における従動歯車3の左側に構成され、出力軸16の他端にロータリーエンコーダ7が接続される。また、計測系Bは、ロータリーエンコーダ7と4つの軸受け15のうちの図1において最も左側に配置された軸受け15との間にフライホイール8が装着される。さらに、出力軸16と同軸上の従動歯車3とフライホイール8との間には計測用トルクメータ9が設けられる。
【0015】
そして、計測系Bは、ロータリーエンコーダ7によって検出された出力軸16の回転数(従動歯車3の回転数)及び計測用トルクメータ9によって計測された出力軸16のトルク変動(歯車対2,3における伝達トルク変動)に基づき、演算装置21によって歯車対2,3の伝達トルクの変動成分が算出される構造になっている。なお、演算装置21では、記憶部(マイクロコンピュータのメモリ)に記憶された歯車2,3の歯数データ、ロータリーエンコーダ7から出力された出力軸16の回転数検出データ、及び計測用トルクメータ9から出力された出力軸16のトルク変動計測データが回転次数分析処理(FFT処理)されることにより歯車対2,3の伝達トルクの変動成分が算出される。
【0016】
次に、本歯車振動強制力評価装置1の作用を説明する。まず、駆動側歯車2を入力軸11の所定位置に取り付けると共に従動側歯車3を出力軸16の所定位置に取り付ける。これにより、駆動側歯車2と従動側歯車3とが噛合わされた歯車対2,3が形成される。次に、吸収用モータ5によって出力軸16に回転負荷(負荷トルク)をかけつつ、駆動用モータ4によって入力軸11を軸心回りに回転させる。これにより、歯車対2,3がそれぞれ軸心回りに回転し、駆動側歯車2から従動側歯車3へ所定の回転トルクが伝達される。なお、本歯車振動強制力評価装置1では、制御装置20によって制御用トルクメータ6の出力信号(負荷トルクデータ)に基づき吸収用モータ5をフィードバック制御することで、歯車対2,3に一定の伝達トルクを発生させる。
【0017】
そして、トルク伝達時における出力軸16の回転数をロータリーエンコーダ7(回転角度検出手段)によって検出すると共に、歯車対2,3の伝達トルク変動を計測用トルクメータ9によって計測する。また、記憶部(マイクロコンピュータのメモリ)に記憶された歯車2,3の歯数データ、ロータリーエンコーダ7から出力された出力軸16の回転数検出データ、及び計測用トルクメータ9から出力された出力軸16のトルク変動計測データを、演算装置21によって回転次数分析処理(FFT処理)し、歯車対2,3の伝達トルクの変動成分を算出する。そして、得られた歯車対2,3の伝達トルクの変動成分に基づき当該歯車対2,3の回転方向の振動強制力を評価する。
【0018】
ここで、本歯車振動強制力評価装置1では、歯車対2,3によって発生した振動強制力が計測用トルクメータ9を介してフライホイール8に伝達される。そして、本歯車振動強制力評価装置1では、当該振動強制力に対して十分大きい慣性を有するフライホイール8を用いることにより、振動強制力はフライホイール8に入力されず、図1における従動側歯車3の左側(吸収用モータ5と反対側)の出力軸16にねじれとなって現れる。そして、本歯車振動強制力評価装置1は、該出力軸16のねじれを計測用トルクメータ9によって伝達トルク変動として計測することで、歯車対2,3の回転方向の伝達トルクの変動成分が得られる。
【0019】
この実施形態では以下の効果を奏する。
本歯車振動強制力評価装置1は、駆動側歯車2に駆動用モータ4を接続し、従動側歯車3に吸収用モータ5を接続し、従動側歯車3と同軸上の吸収用モータ5側に制御用トルクメータ6を設けてなる機械制御系Aと、従動側歯車3と同軸上の吸収用モータ5とは反対側に構成され、ロータリーエンコーダ7(回転角度検出手段)、フライホイール8、及び計測用トルクメータ9を設けてなる計測系Bと、が分離されて構成される。
したがって、本歯車振動強制力評価装置1は、伝達トルクの変動成分を計測する系(計測系B)を、回転負荷を発生させる系(機械制御系A)と分離したことで、当該装置1の共振や振動(駆動用モータ4及び吸収用モータ5のトルクリップル等)の計測用トルクメータ9への影響が排除される。これにより、計測用トルクメータ9による計測のS/N比が高められ、評価の精度を向上させることができる。
また、本歯車振動強制力評価装置1は、負荷トルクに相当する静的なトルク変動が機械制御系Aにて完結されるため、計測系Bには動的な伝達トルクの変動のみを発生させることが可能になる。これにより、計測用トルクメータ9におけるフルスケールを計測したい動的な伝達トルク変動の最大値に設定することができ、計測用トルクメータ9による計測のS/N比が高められ、評価の精度を向上させることができる。
さらに、本歯車振動強制力評価装置1は、計測系Bによって計測された歯車対2,3の伝達トルクの変動成分に基づき歯車対2,3の回転方向の振動強制力が評価されるため、歯車対2,3の噛合い伝達誤差に基づき振動強制力が評価される従来の装置と比較して、当該歯車対2,3の回転方向の振動強制力の評価を効率化することができる。
【0020】
なお、実施形態は上記に限定されるものではなく、例えば次のように構成してもよい。また、以下に示す実施形態の構成要素には、図1に示した構成要素と同じの際は同一符号を付与して詳細な説明を省略する。
(他の実施形態1)
図2に示されるように、機械制御系Aにおける出力軸16の従動側歯車3と制御用トルクメータ6との間(出力軸16と同軸上の吸収用モータ5側)にカップリング22を設けて歯車振動強制力評価装置1を構成してもよい。
この場合、歯車対2,3の振動強制力が制御用トルクメータ6に伝達されるのを防ぐことができる。また、吸収用モータ5のトルクリップル等による外乱(振動)が歯車対2,3側に伝達されるのを防ぐことができる。
【0021】
(他の実施形態2)
図3に示されるように、機械制御系Aにおける入力軸11の駆動用モータ4とは反対側(駆動側歯車2と同軸上の駆動用モータ4とは反対側)にフライホイール23を設けて歯車振動強制力評価装置1を構成してもよい。
この場合、歯車対2,3の振動強制力に対して十分大きい慣性を有するフライホイール23を用いることにより、振動強制力はフライホイール23に入力されず、従動側歯車3に集約され、図3における従動側歯車3の左側(吸収用モータ5と反対側)の出力軸16にねじれとなって現れる。これにより、計測用トルクメータ9によって計測される伝達トルク変動が増幅され、計測用トルクメータ9による計測のS/N比が高められ、評価の精度を向上させることができる。
また、この実施形態では、駆動側歯車2のマスター部品を入力軸11に固定することで、従動側歯車3に起因する振動強制力のみを評価することが可能になり、従動側歯車3の単体での品質保証を実現する評価装置としても用いることができる。
【0022】
(他の実施形態3)
図4に示されるように、駆動側歯車2と同軸上の駆動側歯車2に対して駆動用モータ4とは反対側(図4における右側)に、ロータリーエンコーダ24(回転角度検出手段)、フライホイール23、及び駆動側計測用トルクメータ25を設けてなる駆動側計測系Cを構成して歯車振動強制力評価装置1を構成してもよい。
この場合、歯車対2,3の振動強制力を、計測系B及び計測系Cによって得られた2つの伝達トルクの変動成分に基づき評価することが可能になり、ケーシング(例えば、歯車対2,3が収容されるトランスミッションケース)の伝達感度を含めた複合的な解析を実施することができる。
【図面の簡単な説明】
【0023】
【図1】本実施形態の歯車振動強制力評価装置の説明図である。
【図2】他の実施形態1の歯車振動強制力評価装置の説明図であって、出力軸と同軸上の吸収用モータ側にカップリングを設けてなる歯車振動強制力評価装置の図である。
【図3】他の実施形態2の歯車振動強制力評価装置の説明図であって、駆動側歯車と同軸上の駆動用モータとは反対側にフライホイールを設けてなる歯車振動強制力評価装置の図である。
【図4】他の実施形態3の歯車振動強制力評価装置の説明図であって、駆動側歯車と同軸上の駆動用モータとは反対側に計測系Cを設けてなる歯車振動強制力評価装置の図である。
【符号の説明】
【0024】
1 歯車振動強制力評価装置、2 駆動側歯車、3 従動側歯車、4 駆動用モータ、5 吸収用モータ、6 制御用トルクメータ、7 ロータリーエンコーダ(回転角度検出手段)、8 フライホイール、9 計測用トルクメータ
【特許請求の範囲】
【請求項1】
駆動側歯車と従動側歯車とが噛合わされて構成される歯車対の振動強制力を評価する装置であって、
前記駆動側歯車に駆動用モータを接続し、前記従動側歯車に吸収用モータを接続し、前記従動側歯車と同軸上の前記吸収用モータ側に制御用トルクメータを設けてなる機械制御系と、
前記従動側歯車と同軸上の前記吸収用モータとは反対側に、回転角度検出手段、フライホイール、及び計測用トルクメータを設けてなる計測系と、
によって構成されることを特徴とする歯車振動強制力評価装置。
【請求項2】
前記機械制御系の前記従動側歯車と前記制御用トルクメータとの間にカップリングを設けたことを特徴とする請求項1に記載の歯車振動強制力評価装置。
【請求項3】
前記機械制御系の前記駆動側歯車と同軸上の前記駆動用モータとは反対側にフライホイールを設けたことを特徴とする請求項1又は2に記載の歯車振動強制力評価装置。
【請求項4】
前記駆動側歯車と同軸上の前記駆動用モータとは反対側に、回転角度検出手段、フライホイール、及び駆動側計測用トルクメータを設けてなる駆動側計測系を構成したことを特徴とする請求項1又は2に記載の歯車振動強制力評価装置。
【請求項1】
駆動側歯車と従動側歯車とが噛合わされて構成される歯車対の振動強制力を評価する装置であって、
前記駆動側歯車に駆動用モータを接続し、前記従動側歯車に吸収用モータを接続し、前記従動側歯車と同軸上の前記吸収用モータ側に制御用トルクメータを設けてなる機械制御系と、
前記従動側歯車と同軸上の前記吸収用モータとは反対側に、回転角度検出手段、フライホイール、及び計測用トルクメータを設けてなる計測系と、
によって構成されることを特徴とする歯車振動強制力評価装置。
【請求項2】
前記機械制御系の前記従動側歯車と前記制御用トルクメータとの間にカップリングを設けたことを特徴とする請求項1に記載の歯車振動強制力評価装置。
【請求項3】
前記機械制御系の前記駆動側歯車と同軸上の前記駆動用モータとは反対側にフライホイールを設けたことを特徴とする請求項1又は2に記載の歯車振動強制力評価装置。
【請求項4】
前記駆動側歯車と同軸上の前記駆動用モータとは反対側に、回転角度検出手段、フライホイール、及び駆動側計測用トルクメータを設けてなる駆動側計測系を構成したことを特徴とする請求項1又は2に記載の歯車振動強制力評価装置。
【図1】



【図2】
【図3】
【図4】

【図2】
【図3】
【図4】
【公開番号】特開2008−32416(P2008−32416A)
【公開日】平成20年2月14日(2008.2.14)
【国際特許分類】
【出願番号】特願2006−203163(P2006−203163)
【出願日】平成18年7月26日(2006.7.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成20年2月14日(2008.2.14)
【国際特許分類】
【出願日】平成18年7月26日(2006.7.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]