
測位装置及びプログラム
【課題】一周波数GPS受信機を用いた場合でも、精度良く測位解を得る。
【解決手段】エポック毎にGPS受信機12で受信したGPS情報及びINS装置14で取得したINS情報を、Mエポックデータ記憶部22に記憶する。方程式導出部24は、M(3以上)エポック分のGPS情報及びINS情報を観測値とし、かつ複数のGPS衛星各々と自車両間におけるGPS情報の搬送波の波数Nのフロート解を、GPS衛星毎に求めるための観測方程式であって、波数Nのフロート解の範囲が、Mエポック分のINS情報に基づいて推定された自車両の走行軌跡で拘束された観測方程式を導出する。フロート解計算部26では、観測方程式を解いて、GPS衛星毎の波数N及び自車両の位置のフロート解を計算し、フィックス解計算部30では、GPS衛星毎の波数N及び自車両の位置のフロート解各々に基づいて、最も整合性が高いフィックス解を計算し、測位結果として出力する。
【解決手段】エポック毎にGPS受信機12で受信したGPS情報及びINS装置14で取得したINS情報を、Mエポックデータ記憶部22に記憶する。方程式導出部24は、M(3以上)エポック分のGPS情報及びINS情報を観測値とし、かつ複数のGPS衛星各々と自車両間におけるGPS情報の搬送波の波数Nのフロート解を、GPS衛星毎に求めるための観測方程式であって、波数Nのフロート解の範囲が、Mエポック分のINS情報に基づいて推定された自車両の走行軌跡で拘束された観測方程式を導出する。フロート解計算部26では、観測方程式を解いて、GPS衛星毎の波数N及び自車両の位置のフロート解を計算し、フィックス解計算部30では、GPS衛星毎の波数N及び自車両の位置のフロート解各々に基づいて、最も整合性が高いフィックス解を計算し、測位結果として出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測位装置及びプログラムに関する。
【背景技術】
【0002】
従来、搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナとを有する自律陸上車両(AGV)のための水平航法システムが提案されている(例えば、特許文献1参照)。特許文献1のシステムでは、航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定し、EKFの測定値として、二周波数GPS受信機からの二重差分型符号と搬送波位相およびレーザスキャナ測定から生じる相対位置を用いている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−138834号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
GPS情報を用いた測位において、一周波数GPS受信機を用いた場合では、現時刻のデータと直前の時刻のデータとの状態量を元に位置を推定するため、局所解に陥り易く、ノイズに弱いという問題がある。特許文献1に記載のシステムのように、二周波数GPS受信機を用いた場合には、周波数ダイバーシティの効果で測位精度を改善することができる。しかし、二周波数GPS受信機は、一周波数GPS受信機と比較して大変高価であるため、汎用性に欠ける、という問題がある。
【0005】
本発明は、上記の問題点を解決するためになされたもので、一周波数GPS受信機を用いた場合でも、精度良く測位解を得ることができる測位装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の測位装置は、複数のGPS衛星各々から送信された擬似距離及び位相を含むGPS情報各々と、自装置が搭載された移動体の移動量を含むINS情報とを、エポック毎に取得する取得手段と、前記取得手段により取得したGPS情報及びINS情報を観測値とし、かつ前記複数のGPS衛星各々と前記移動体間における前記GPS情報の搬送波の波数のフロート解を該GPS衛星毎に求めるための観測方程式であって、前記波数のフロート解の範囲が、3エポック以上の前記INS情報に基づいて推定された前記移動体の移動軌跡で拘束された観測方程式を導出する導出手段と、前記導出手段により導出された観測方程式を解いて、前記GPS衛星毎の波数のフロート解を計算する計算手段と、前記計算手段で計算されたGPS衛星毎の波数のフロート解各々に基づいて、最も整合性が高い波数のフィックス解を計算し、該波数のフィックス解から得られる前記複数のGPS衛星各々と前記移動体との距離に基づいて、前記移動体の位置を測位する測位手段と、を含んで構成されている。
【0007】
本発明の測位装置によれば、取得手段が、複数のGPS衛星各々から送信された擬似距離及び位相を含むGPS情報各々と、自装置が搭載された移動体の移動量を含むINS(Inertial Navigation System、慣性航法システム)情報とを、エポック毎に取得する。導出手段では、取得手段により取得したGPS情報及びINS情報を観測値とし、かつ複数のGPS衛星各々と移動体間におけるGPS情報の搬送波の波数のフロート解を、GPS衛星毎に求めるための観測方程式であって、波数のフロート解の範囲が、3エポック以上のINS情報に基づいて推定された移動体の移動軌跡で拘束された観測方程式を導出する。そして、計算手段が、導出手段により導出された観測方程式を解いて、GPS衛星毎の波数のフロート解を計算する。そして、測位手段が、計算手段で計算されたGPS衛星毎の波数のフロート解各々に基づいて、最も整合性が高い波数のフィックス解を計算し、波数のフィックス解から得られる複数のGPS衛星各々と移動体との距離に基づいて、移動体の位置を測位する。
【0008】
このように、波数のフロート解を3エポック以上のINS情報に基づいて推定された移動体の移動軌跡で拘束することにより、フロート解の精度が向上し、フィックス解の探索範囲が狭まる。これにより、一周波数GPS受信機を用いた場合でも、精度良く測位解を得ることができる。
【0009】
また、本発明の測位装置は、前記導出手段により導出された観測方程式に基づいて、前記移動軌跡との残差が予め定めた閾値以上となる擬似距離を含むGPS情報、または該GPS情報を送信したGPS衛星から送信された全てのGPS情報を、前記取得手段により取得したGPS情報から排除して、前記導出手段により、再度観測方程式が導出されるように制御する制御手段を含んで構成することができる。これにより、マルチパス等の影響を受けたつじつまの合わないGPS情報を排除することができるため、測位精度がより向上する。
【0010】
また、本発明の測位プログラムは、コンピュータを、複数のGPS衛星各々から送信された擬似距離及び位相を含むGPS情報各々と、自装置が搭載された移動体の移動量を含むINS情報とを、エポック毎に取得する取得手段、前記取得手段により取得されたGPS情報及びINS情報を観測値とし、かつ前記複数のGPS衛星各々と前記移動体間における前記GPS情報の搬送波の波数のフロート解を、該GPS衛星毎に求めるための観測方程式であって、前記波数のフロート解の範囲が、3エポック以上の前記INS情報に基づいて推定された前記移動体の移動軌跡で拘束された観測方程式を導出する導出手段、前記導出手段により導出された観測方程式を解いて、前記GPS衛星毎の波数のフロート解を計算する計算手段、及び前記計算手段で計算されたGPS衛星毎の波数のフロート解各々に基づいて、最も整合性が高い波数のフィックス解を計算し、該波数のフィックス解から得られる前記複数のGPS衛星各々と前記移動体との距離に基づいて、前記移動体の位置を測位する測位手段として機能させるためのプログラムである。
【0011】
なお、本発明のプログラムを記憶する記憶媒体は、特に限定されず、ハードディスクであってもよいし、ROMであってもよい。また、CD−ROMやDVDディスク、光磁気ディスクやICカードであってもよい。更にまた、該プログラムを、ネットワークに接続されたサーバ等からダウンロードするようにしてもよい。
【発明の効果】
【0012】
以上説明したように、本発明の測位装置及びプログラムによれば、波数のフロート解を3エポック以上のINS情報に基づいて推定された移動体の移動軌跡で拘束することにより、フロート解の精度が向上し、フィックス解の探索範囲が狭まる。これにより、一周波数GPS受信機を用いた場合でも、精度良く測位解を得ることができる、という効果が得られる。
【図面の簡単な説明】
【0013】
【図1】本実施の形態に係る測位装置の機能的構成を示すブロック図である。
【図2】波数を用いた距離推定のイメージ図である。
【図3】フロート解からフィックス解を求めるイメージ図である。
【図4】2周波数の場合のフィックス解探索空間を説明するための図である。
【図5】本実施の形態の原理を説明するための図である。
【図6】従来例として、カルマンフィルタを用いる場合の問題点を説明するための図である。
【図7】GPS衛星、移動局、及び基準局の関係を示すイメージ図である。
【図8】つじつまの合わないGPS衛星を示すイメージ図である。
【図9】Mエポック分の走行軌跡による拘束により、フィックス解の探索範囲が狭まったフロート解を示すイメージ図である。
【図10】本実施の形態における測位処理ルーチンの内容を示すフローチャートである。
【図11】(a)1エポック分のデータを用いた測位結果(比較例)、(b)カルマンフィルタを用いた測位結果(比較例)、及び(c)本実施の形態の測位装置による測位結果を示す図である。
【発明を実施するための形態】
【0014】
以下、図面を参照して本発明の実施の形態を詳細に説明する。本実施の形態では、車両に搭載され、自車両の位置を測位する測位装置に本発明を適用した例について説明する。
【0015】
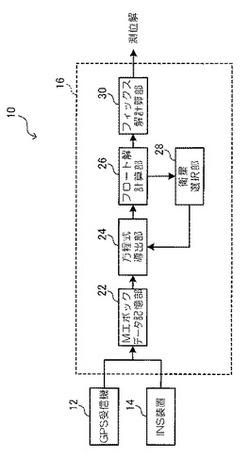
図1に示すように、本実施の形態の測位装置10は、GPS衛星及び基地局から送信されたGPS情報を受信する一周波のGPS受信機12と、自車両の移動量を含むINS情報を取得するINS装置14と、GPS情報及びINS情報に基づいて測位解を計算するコンピュータ16とを含んで構成されている。
【0016】
GPS受信機12で受信されるGPS情報は、擬似距離、位相、及びエフェメリスを含む。また、INS装置14は、速度センサ、ヨーレイトセンサ、及びジャイロセンサを備え、各センサにより検出された検出値に基づいて、自車両の移動量を算出する。
【0017】
コンピュータ16は、CPU、後述する測位処理ルーチンを実現するためのプログラムを記憶したROM、データを一時的に記憶するRAM、及びHDD等の記憶装置を含んで構成されている。
【0018】
このコンピュータ16を以下で説明する測位処理ルーチンに従って機能ブロックで表すと、図1に示すように、エポック毎にGPS受信機12で受信したGPS情報及びINS装置14で取得したINS情報を記憶するMエポックデータ記憶部22と、Mエポックデータ記憶部22からMエポック分のGPS情報及びINS情報を取得し、GPS情報とINS情報とを統合した観測方程式を導出する方程式導出部24と、観測方程式からフロート解を計算するフロート解計算部26と、残差に基づいて整合性のないGPS衛星を選択する衛星選択部28と、フロート解からフィックス解を計算するフィックス解計算部30とを含んだ構成で表すことができる。
【0019】
ここで、本実施の形態の原理について説明する。
【0020】
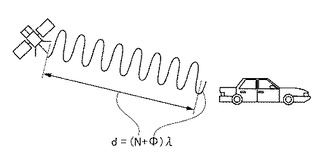
図2に示すように、自車両と複数のGPS衛星各々との距離dが分かれば、自車両の位置を測位することができる。ここで、GPS衛星から送信された搬送波の波長をλ、距離d間の搬送波の波数をN、位相をφとすると、距離dは、下記(1)式で求まる。
【0021】
d=(N+φ)λ ・・・(1)
λは既知の値であり、位相φはGPS受信機12で受信するGPS情報から取得可能であるが、波数Nは観測することができない。この波数Nを高精度に推定することができれば、距離dも高精度に推定することができ、高精度の測位解が得られる。
【0022】
波数Nの推定には、GPS情報として取得される擬似距離を用いる。GPS情報として取得される位相φは比較的高精度であるが、擬似距離ρは精度が低いことが知られている。そこで、まず、上記(1)式のdを擬似距離ρとして、下記(2)式により、大雑把な波数N(少数、フロート解)を求める。
【0023】
N=ρ/λ−φ ・・・(2)
【0024】
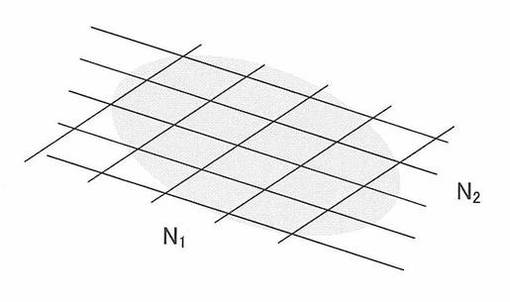
上記のようにして、各GPS衛星から受信した擬似距離を用いて、GPS情報を受信した全GPS衛星について波数Nを求め、例えば、図3に示すように、格子点探索などにより、全GPS衛星についてつじつまの合う整数解(フィックス解)を探索する。
【0025】
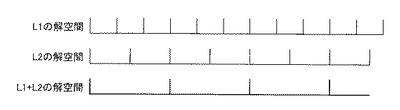
フィックス解を探索する際に、2周波数GPS受信機を用いた場合であれば、図4に示すように、2つの周波数の両方につじつまの合うフィックス解を求めることで、探索空間が小さくなり、精度良くフィックス解を得ることができる。しかし、この手法は、1周波数GPS受信機を用いた場合には適用することができない。
【0026】
また、波数Nは時間を通して一定であることを利用して、複数時刻において求められた波数Nを平均する手法も考えられる。この場合、推定される波数Nが収束するまでに長時間を要したり、ノイズの影響で間違った解に収束したりする問題がある。
【0027】
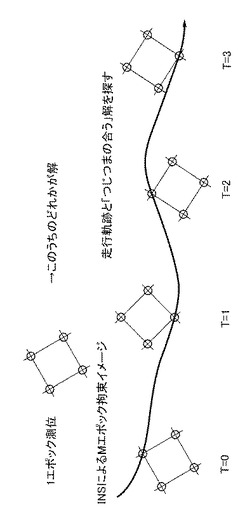
そこで、本実施の形態では、図5に示すように、GPS情報に基づいて波数Nのフロート解及びその波数Nを用いて得られる自車両位置xのフロート解を求める際に、Mエポック分のINS情報に基づいて推定される自車両の走行軌跡で拘束する。すなわち、Mエポック分の走行軌跡とつじつまの合う波数Nのフロート解を求めることにより、フロート解の精度を向上させ、フィックス解の探索範囲を狭める。
【0028】
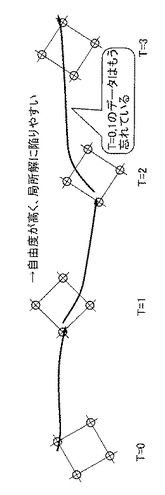
なお、GPS情報とINS情報とを統合する手法として、従来手法の1つであるカルマンフィルタを用いた場合には、図6に示すように、2エポックずつの拘束となり、フロート解の自由度が高く、局所解に陥りやすい。そこで、フロート解を求める際の拘束条件となる走行軌跡を推定するためのエポック数Mは3以上とする。
【0029】
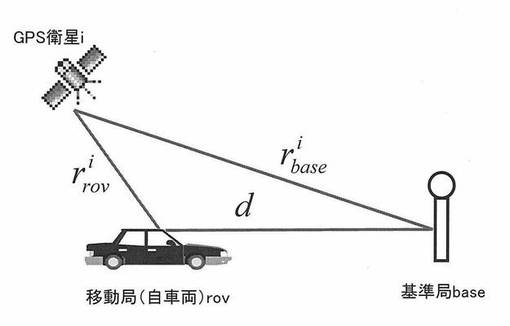
方程式導出部24は、上記の本実施の形態の原理に従って、GPS情報及びINS情報を観測値として、Mエポック分の拘束条件の下、波数N及び位置xのフロート解を推定する観測方程式を導出する。具体的には、まず、Mエポックデータ記憶部22に記憶されたMエポック分のGPS情報を取得する。図7に示すように、移動局(自車両)rovにおいて、位置が既知の基準局base及びGPS衛星i各々から受信したGPS情報、並びにINS装置14で取得したINS情報に基づいて、各パラメータを以下のように定める。なお、iはGPS衛星番号(1〜n)、jはエポック番号(1〜M)を表す。
【0030】
【数1】

【0031】
そして、これらのパラメータを用いて、下記(3)式に示すGPS観測値の観測方程式を導出する。また、このときのGPS観測値の共分散は下記(4)式となる。
【0032】
【数2】
【0033】
次に、Mエポックデータ記憶部22に記憶されたMエポック分のINS情報を取得し、下記(5)式に示すINS観測値の観測方程式を導出する。また、このときのINS観測値の共分散は下記(6)式となる。なお、E、N、Uはそれぞれ自車両位置xの東、北、上方向成分を表す。
【0034】
【数3】
【0035】
そして、(3)式のGPS観測値の観測方程式、及び(5)式のINS観測値の観測方程式を統合して、下記(7)式に示すGPS−INS観測方程式を導出する。また、(4)式のGPS観測値の共分散、及び(6)式のINS観測値の共分散を統合して、下記(8)式に示すGPS−INS観測値の共分散を得る。
【0036】
【数4】
【0037】
フロート解計算部26は、方程式導出部24で導出されたGPS−INS観測方程式を解いて、下記(9)式により自車両の状態(位置,N,θ)xのフロート解を計算する。また、その共分散Qxを下記(10)により計算する。
【0038】
【数5】
【0039】
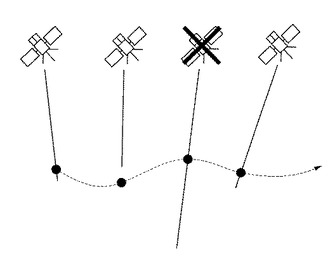
衛星選択部28は、INS情報により推定された自車両の走行軌跡とのつじつまが合わない擬似距離ρを送信したGPS衛星からのGPS情報を排除する。つじつまが合わないとは、図8に示すように、各エポックでの走行軌跡上の点とそのエポックでの衛星位置との距離と、そのエポックでの擬似距離との差が大きいことをいう。具体的には、(7)式のGPS−INS観測方程式で推定される状態と、実際の観測値(位相φ、擬似距離ρ、自車両の速度v)との残差を、下記(11)式により計算する。
【0040】
【数6】
【0041】
ここで、rφは位相の残差、rρは擬似距離の残差、rvはINS速度の残差である。この残差rの大きいGPS衛星からのGPS情報は、マルチパスやサイクルスリップ等の影響を受けたつじつまの合わないGPS情報であると判定することができる。従って、残差rが所定の閾値以上となるGPS衛星をつじつまの合わないGPS衛星として排除し、その衛星番号を方程式導出部24に出力する。方程式導出部24では、衛星選択部28から出力された衛星番号のGPS衛星から受信したGPS情報を排除して、再度、GPS−INS観測方程式を導出し、フロート解計算部26で、再度、フロート解を計算する。
【0042】
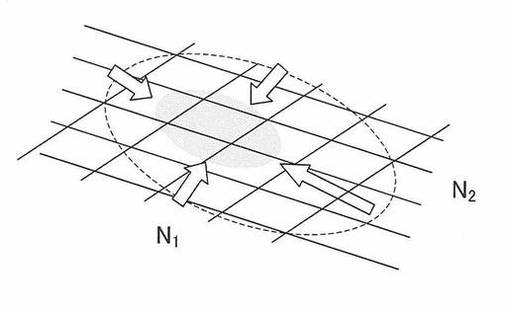
フィックス解計算部30は、衛星選択部28によるつじつまの合わないGPS衛星の排除後に、フロート解計算部26で計算された自車両の位置xのフロート解からフィックス解を計算する。フィックス解の計算は、従来既知の方法を用いることができ、例えば、Lambda法(XW Chang, 2005, MLAMBDA: A Modified LAMBDA Method for Integer Ambiguily Determination http://www.cs.mcgill.ca/~chang/pub/F2-3-Chang.pdf)に、(9)式及び(10)式のx及びQxを入力して、フィックス解を求めることができる。このとき、ratio testと呼ばれる方法でフィックス解の精度をチェックし、精度の悪いフィックス解を排除することができる。本実施の形態では、方程式導出部24で導出したGPS−INS観測方程式は、上記本実施の形態の原理で述べたように、Mエポック分の走行軌跡を拘束条件としている。そのため、図9に示すように、フロート解計算部26で計算されるフロート解の精度が向上しており、フィックス解計算部30での探索範囲が狭まるため、フィックス解計算部30においても、高精度にフィックス解を計算することができる。フィックス解計算部30は、計算されたフィックス解を測位解として出力する。
【0043】
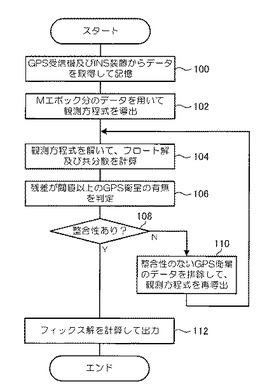
次に、図10を参照して、本実施の形態の測位装置10において実行される測位処理ルーチンについて説明する。
【0044】
ステップ100で、エポック毎にGPS受信機12で受信したGPS情報及びINS装置14で取得したINS情報を取得して、Mエポックデータ記憶部22記憶する。
【0045】
次に、ステップ102で、Mエポックデータ記憶部22に記憶されたMエポック分のGPS情報及びINS情報を取得し、(3)式に示すGPS観測値の観測方程式、及び(5)式に示すINS観測値の観測方程式を導出する。また、このときのGPS観測値の共分散及びINS観測値の共分散も(4)式及び(6)式により求める。そして、(3)式と(5)式とを統合して、(7)式に示すGPS−INS観測方程式を導出する。また、(4)式のGPS観測値の共分散、及び(6)式のINS観測値の共分散を統合して、(8)式に示すGPS−INS観測値の共分散を得る。
【0046】
次に、ステップ104で、上記ステップ102で導出されたGPS−INS観測方程式を解いて、(9)式により自車両の状態(位置,N,θ)xのフロート解を計算し、その共分散Qxを(10)により計算する。
【0047】
次に、ステップ106で、(11)式により残差rを計算し、残差rが所定の閾値以上となるGPS衛星、すなわち、つじつまの合わないGPS衛星の有無を判定する。次に、ステップ108で、上記ステップ106での判定結果に基づいて、上記ステップ104で計算されたフロート解に整合性があるか否かを判定する。上記ステップ106で、つじつまの合わないGPS衛星が存在すると判定された場合には、本ステップで整合性なしと判定されて、ステップ110へ移行する。
【0048】
ステップ110では、上記ステップ102で取得したMエポック分のGPS情報のうち、上記ステップ106でつじつまが合わないと判定されたGPS衛星から受信したGPS情報を排除して、再度、(7)式のGPS−INS観測方程式を導出して、ステップ104へ戻る。
【0049】
上記ステップ108で、フロート解に整合性あり、すなわち、つじつまの合わないGPS衛星が存在しないと判定された場合には、ステップ112へ移行し、上記ステップ104で計算された自車両の位置xのフロート解から、従来既知の手法を用いてフィックス解を計算する。計算されたフィックス解を測位解として出力して、測位処理ルーチンを終了する。
【0050】
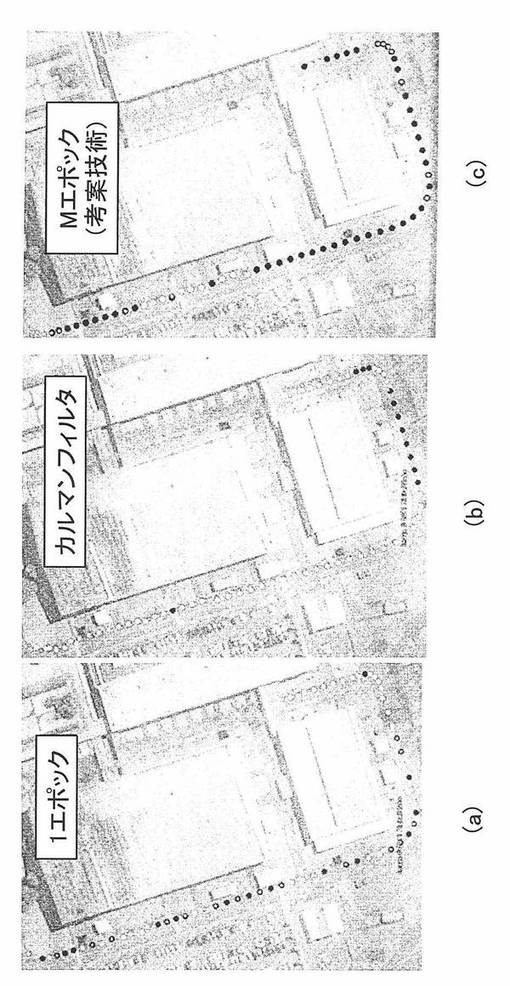
図11(a)に、1エポック分のデータを用いた測位結果(比較例)、(b)に、カルマンフィルタを用いた測位結果(比較例)、及び(c)に、本実施の形態の測位装置による測位結果の一例を示す。白丸が各エポックでの車両位置のフロート解であり、黒丸がフィックス解である。ratio testで除かれたフィックス解は表示していない。本実施の形態の測位装置では、他の比較例と比較して、より多くの場所で高精度なフィックス解を測位できていることがわかる。
【0051】
以上説明したように、本実施の形態の測位装置によれば、GPS情報に基づいて波数Nのフロート解及びその波数Nを用いて得られる自車両位置xのフロート解を求める際に、Mエポック分のINS情報に基づいて推定される自車両の走行軌跡で拘束する。すなわち、Mエポック分の走行軌跡とつじつまの合うフロート解を求めることにより、フロート解の精度を向上させ、フィックス解の探索範囲を狭める。これにより、一周波数GPS受信機を用いた場合でも、精度良く測位解を得ることができる。
【0052】
なお、上記実施の形態では、波数のフロート解とそのフロート解から得られる自車両の位置とが同時に計算できる観測方程式を導出する場合について説明したが、波数のフロート解のみを求める観測方程式を導出し、波数のフィックス解を求めた後に、この波数のフィックス解を用いて自車両の位置を計算するようにしてもよい。
【0053】
また、上記実施の形態では、衛星選択部でつじつまの合わないGPS衛星を選択し、そのGPS衛星からのGPS情報を排除する場合について説明したが、そのGPS衛星からの全てのGPS情報を排除するのではなく、つじつまの合わないGPS情報のみを排除するようにしてもよい。
【符号の説明】
【0054】
10 測位装置
12 GPS受信機
14 INS装置
16 コンピュータ
22 Mエポックデータ記憶部
24 方程式導出部
26 フロート解計算部
28 衛星選択部
30 フィックス解計算部
【技術分野】
【0001】
本発明は、測位装置及びプログラムに関する。
【背景技術】
【0002】
従来、搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナとを有する自律陸上車両(AGV)のための水平航法システムが提案されている(例えば、特許文献1参照)。特許文献1のシステムでは、航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定し、EKFの測定値として、二周波数GPS受信機からの二重差分型符号と搬送波位相およびレーザスキャナ測定から生じる相対位置を用いている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−138834号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
GPS情報を用いた測位において、一周波数GPS受信機を用いた場合では、現時刻のデータと直前の時刻のデータとの状態量を元に位置を推定するため、局所解に陥り易く、ノイズに弱いという問題がある。特許文献1に記載のシステムのように、二周波数GPS受信機を用いた場合には、周波数ダイバーシティの効果で測位精度を改善することができる。しかし、二周波数GPS受信機は、一周波数GPS受信機と比較して大変高価であるため、汎用性に欠ける、という問題がある。
【0005】
本発明は、上記の問題点を解決するためになされたもので、一周波数GPS受信機を用いた場合でも、精度良く測位解を得ることができる測位装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の測位装置は、複数のGPS衛星各々から送信された擬似距離及び位相を含むGPS情報各々と、自装置が搭載された移動体の移動量を含むINS情報とを、エポック毎に取得する取得手段と、前記取得手段により取得したGPS情報及びINS情報を観測値とし、かつ前記複数のGPS衛星各々と前記移動体間における前記GPS情報の搬送波の波数のフロート解を該GPS衛星毎に求めるための観測方程式であって、前記波数のフロート解の範囲が、3エポック以上の前記INS情報に基づいて推定された前記移動体の移動軌跡で拘束された観測方程式を導出する導出手段と、前記導出手段により導出された観測方程式を解いて、前記GPS衛星毎の波数のフロート解を計算する計算手段と、前記計算手段で計算されたGPS衛星毎の波数のフロート解各々に基づいて、最も整合性が高い波数のフィックス解を計算し、該波数のフィックス解から得られる前記複数のGPS衛星各々と前記移動体との距離に基づいて、前記移動体の位置を測位する測位手段と、を含んで構成されている。
【0007】
本発明の測位装置によれば、取得手段が、複数のGPS衛星各々から送信された擬似距離及び位相を含むGPS情報各々と、自装置が搭載された移動体の移動量を含むINS(Inertial Navigation System、慣性航法システム)情報とを、エポック毎に取得する。導出手段では、取得手段により取得したGPS情報及びINS情報を観測値とし、かつ複数のGPS衛星各々と移動体間におけるGPS情報の搬送波の波数のフロート解を、GPS衛星毎に求めるための観測方程式であって、波数のフロート解の範囲が、3エポック以上のINS情報に基づいて推定された移動体の移動軌跡で拘束された観測方程式を導出する。そして、計算手段が、導出手段により導出された観測方程式を解いて、GPS衛星毎の波数のフロート解を計算する。そして、測位手段が、計算手段で計算されたGPS衛星毎の波数のフロート解各々に基づいて、最も整合性が高い波数のフィックス解を計算し、波数のフィックス解から得られる複数のGPS衛星各々と移動体との距離に基づいて、移動体の位置を測位する。
【0008】
このように、波数のフロート解を3エポック以上のINS情報に基づいて推定された移動体の移動軌跡で拘束することにより、フロート解の精度が向上し、フィックス解の探索範囲が狭まる。これにより、一周波数GPS受信機を用いた場合でも、精度良く測位解を得ることができる。
【0009】
また、本発明の測位装置は、前記導出手段により導出された観測方程式に基づいて、前記移動軌跡との残差が予め定めた閾値以上となる擬似距離を含むGPS情報、または該GPS情報を送信したGPS衛星から送信された全てのGPS情報を、前記取得手段により取得したGPS情報から排除して、前記導出手段により、再度観測方程式が導出されるように制御する制御手段を含んで構成することができる。これにより、マルチパス等の影響を受けたつじつまの合わないGPS情報を排除することができるため、測位精度がより向上する。
【0010】
また、本発明の測位プログラムは、コンピュータを、複数のGPS衛星各々から送信された擬似距離及び位相を含むGPS情報各々と、自装置が搭載された移動体の移動量を含むINS情報とを、エポック毎に取得する取得手段、前記取得手段により取得されたGPS情報及びINS情報を観測値とし、かつ前記複数のGPS衛星各々と前記移動体間における前記GPS情報の搬送波の波数のフロート解を、該GPS衛星毎に求めるための観測方程式であって、前記波数のフロート解の範囲が、3エポック以上の前記INS情報に基づいて推定された前記移動体の移動軌跡で拘束された観測方程式を導出する導出手段、前記導出手段により導出された観測方程式を解いて、前記GPS衛星毎の波数のフロート解を計算する計算手段、及び前記計算手段で計算されたGPS衛星毎の波数のフロート解各々に基づいて、最も整合性が高い波数のフィックス解を計算し、該波数のフィックス解から得られる前記複数のGPS衛星各々と前記移動体との距離に基づいて、前記移動体の位置を測位する測位手段として機能させるためのプログラムである。
【0011】
なお、本発明のプログラムを記憶する記憶媒体は、特に限定されず、ハードディスクであってもよいし、ROMであってもよい。また、CD−ROMやDVDディスク、光磁気ディスクやICカードであってもよい。更にまた、該プログラムを、ネットワークに接続されたサーバ等からダウンロードするようにしてもよい。
【発明の効果】
【0012】
以上説明したように、本発明の測位装置及びプログラムによれば、波数のフロート解を3エポック以上のINS情報に基づいて推定された移動体の移動軌跡で拘束することにより、フロート解の精度が向上し、フィックス解の探索範囲が狭まる。これにより、一周波数GPS受信機を用いた場合でも、精度良く測位解を得ることができる、という効果が得られる。
【図面の簡単な説明】
【0013】
【図1】本実施の形態に係る測位装置の機能的構成を示すブロック図である。
【図2】波数を用いた距離推定のイメージ図である。
【図3】フロート解からフィックス解を求めるイメージ図である。
【図4】2周波数の場合のフィックス解探索空間を説明するための図である。
【図5】本実施の形態の原理を説明するための図である。
【図6】従来例として、カルマンフィルタを用いる場合の問題点を説明するための図である。
【図7】GPS衛星、移動局、及び基準局の関係を示すイメージ図である。
【図8】つじつまの合わないGPS衛星を示すイメージ図である。
【図9】Mエポック分の走行軌跡による拘束により、フィックス解の探索範囲が狭まったフロート解を示すイメージ図である。
【図10】本実施の形態における測位処理ルーチンの内容を示すフローチャートである。
【図11】(a)1エポック分のデータを用いた測位結果(比較例)、(b)カルマンフィルタを用いた測位結果(比較例)、及び(c)本実施の形態の測位装置による測位結果を示す図である。
【発明を実施するための形態】
【0014】
以下、図面を参照して本発明の実施の形態を詳細に説明する。本実施の形態では、車両に搭載され、自車両の位置を測位する測位装置に本発明を適用した例について説明する。
【0015】
図1に示すように、本実施の形態の測位装置10は、GPS衛星及び基地局から送信されたGPS情報を受信する一周波のGPS受信機12と、自車両の移動量を含むINS情報を取得するINS装置14と、GPS情報及びINS情報に基づいて測位解を計算するコンピュータ16とを含んで構成されている。
【0016】
GPS受信機12で受信されるGPS情報は、擬似距離、位相、及びエフェメリスを含む。また、INS装置14は、速度センサ、ヨーレイトセンサ、及びジャイロセンサを備え、各センサにより検出された検出値に基づいて、自車両の移動量を算出する。
【0017】
コンピュータ16は、CPU、後述する測位処理ルーチンを実現するためのプログラムを記憶したROM、データを一時的に記憶するRAM、及びHDD等の記憶装置を含んで構成されている。
【0018】
このコンピュータ16を以下で説明する測位処理ルーチンに従って機能ブロックで表すと、図1に示すように、エポック毎にGPS受信機12で受信したGPS情報及びINS装置14で取得したINS情報を記憶するMエポックデータ記憶部22と、Mエポックデータ記憶部22からMエポック分のGPS情報及びINS情報を取得し、GPS情報とINS情報とを統合した観測方程式を導出する方程式導出部24と、観測方程式からフロート解を計算するフロート解計算部26と、残差に基づいて整合性のないGPS衛星を選択する衛星選択部28と、フロート解からフィックス解を計算するフィックス解計算部30とを含んだ構成で表すことができる。
【0019】
ここで、本実施の形態の原理について説明する。
【0020】
図2に示すように、自車両と複数のGPS衛星各々との距離dが分かれば、自車両の位置を測位することができる。ここで、GPS衛星から送信された搬送波の波長をλ、距離d間の搬送波の波数をN、位相をφとすると、距離dは、下記(1)式で求まる。
【0021】
d=(N+φ)λ ・・・(1)
λは既知の値であり、位相φはGPS受信機12で受信するGPS情報から取得可能であるが、波数Nは観測することができない。この波数Nを高精度に推定することができれば、距離dも高精度に推定することができ、高精度の測位解が得られる。
【0022】
波数Nの推定には、GPS情報として取得される擬似距離を用いる。GPS情報として取得される位相φは比較的高精度であるが、擬似距離ρは精度が低いことが知られている。そこで、まず、上記(1)式のdを擬似距離ρとして、下記(2)式により、大雑把な波数N(少数、フロート解)を求める。
【0023】
N=ρ/λ−φ ・・・(2)
【0024】
上記のようにして、各GPS衛星から受信した擬似距離を用いて、GPS情報を受信した全GPS衛星について波数Nを求め、例えば、図3に示すように、格子点探索などにより、全GPS衛星についてつじつまの合う整数解(フィックス解)を探索する。
【0025】
フィックス解を探索する際に、2周波数GPS受信機を用いた場合であれば、図4に示すように、2つの周波数の両方につじつまの合うフィックス解を求めることで、探索空間が小さくなり、精度良くフィックス解を得ることができる。しかし、この手法は、1周波数GPS受信機を用いた場合には適用することができない。
【0026】
また、波数Nは時間を通して一定であることを利用して、複数時刻において求められた波数Nを平均する手法も考えられる。この場合、推定される波数Nが収束するまでに長時間を要したり、ノイズの影響で間違った解に収束したりする問題がある。
【0027】
そこで、本実施の形態では、図5に示すように、GPS情報に基づいて波数Nのフロート解及びその波数Nを用いて得られる自車両位置xのフロート解を求める際に、Mエポック分のINS情報に基づいて推定される自車両の走行軌跡で拘束する。すなわち、Mエポック分の走行軌跡とつじつまの合う波数Nのフロート解を求めることにより、フロート解の精度を向上させ、フィックス解の探索範囲を狭める。
【0028】
なお、GPS情報とINS情報とを統合する手法として、従来手法の1つであるカルマンフィルタを用いた場合には、図6に示すように、2エポックずつの拘束となり、フロート解の自由度が高く、局所解に陥りやすい。そこで、フロート解を求める際の拘束条件となる走行軌跡を推定するためのエポック数Mは3以上とする。
【0029】
方程式導出部24は、上記の本実施の形態の原理に従って、GPS情報及びINS情報を観測値として、Mエポック分の拘束条件の下、波数N及び位置xのフロート解を推定する観測方程式を導出する。具体的には、まず、Mエポックデータ記憶部22に記憶されたMエポック分のGPS情報を取得する。図7に示すように、移動局(自車両)rovにおいて、位置が既知の基準局base及びGPS衛星i各々から受信したGPS情報、並びにINS装置14で取得したINS情報に基づいて、各パラメータを以下のように定める。なお、iはGPS衛星番号(1〜n)、jはエポック番号(1〜M)を表す。
【0030】
【数1】
【0031】
そして、これらのパラメータを用いて、下記(3)式に示すGPS観測値の観測方程式を導出する。また、このときのGPS観測値の共分散は下記(4)式となる。
【0032】
【数2】
【0033】
次に、Mエポックデータ記憶部22に記憶されたMエポック分のINS情報を取得し、下記(5)式に示すINS観測値の観測方程式を導出する。また、このときのINS観測値の共分散は下記(6)式となる。なお、E、N、Uはそれぞれ自車両位置xの東、北、上方向成分を表す。
【0034】
【数3】
【0035】
そして、(3)式のGPS観測値の観測方程式、及び(5)式のINS観測値の観測方程式を統合して、下記(7)式に示すGPS−INS観測方程式を導出する。また、(4)式のGPS観測値の共分散、及び(6)式のINS観測値の共分散を統合して、下記(8)式に示すGPS−INS観測値の共分散を得る。
【0036】
【数4】
【0037】
フロート解計算部26は、方程式導出部24で導出されたGPS−INS観測方程式を解いて、下記(9)式により自車両の状態(位置,N,θ)xのフロート解を計算する。また、その共分散Qxを下記(10)により計算する。
【0038】
【数5】
【0039】
衛星選択部28は、INS情報により推定された自車両の走行軌跡とのつじつまが合わない擬似距離ρを送信したGPS衛星からのGPS情報を排除する。つじつまが合わないとは、図8に示すように、各エポックでの走行軌跡上の点とそのエポックでの衛星位置との距離と、そのエポックでの擬似距離との差が大きいことをいう。具体的には、(7)式のGPS−INS観測方程式で推定される状態と、実際の観測値(位相φ、擬似距離ρ、自車両の速度v)との残差を、下記(11)式により計算する。
【0040】
【数6】
【0041】
ここで、rφは位相の残差、rρは擬似距離の残差、rvはINS速度の残差である。この残差rの大きいGPS衛星からのGPS情報は、マルチパスやサイクルスリップ等の影響を受けたつじつまの合わないGPS情報であると判定することができる。従って、残差rが所定の閾値以上となるGPS衛星をつじつまの合わないGPS衛星として排除し、その衛星番号を方程式導出部24に出力する。方程式導出部24では、衛星選択部28から出力された衛星番号のGPS衛星から受信したGPS情報を排除して、再度、GPS−INS観測方程式を導出し、フロート解計算部26で、再度、フロート解を計算する。
【0042】
フィックス解計算部30は、衛星選択部28によるつじつまの合わないGPS衛星の排除後に、フロート解計算部26で計算された自車両の位置xのフロート解からフィックス解を計算する。フィックス解の計算は、従来既知の方法を用いることができ、例えば、Lambda法(XW Chang, 2005, MLAMBDA: A Modified LAMBDA Method for Integer Ambiguily Determination http://www.cs.mcgill.ca/~chang/pub/F2-3-Chang.pdf)に、(9)式及び(10)式のx及びQxを入力して、フィックス解を求めることができる。このとき、ratio testと呼ばれる方法でフィックス解の精度をチェックし、精度の悪いフィックス解を排除することができる。本実施の形態では、方程式導出部24で導出したGPS−INS観測方程式は、上記本実施の形態の原理で述べたように、Mエポック分の走行軌跡を拘束条件としている。そのため、図9に示すように、フロート解計算部26で計算されるフロート解の精度が向上しており、フィックス解計算部30での探索範囲が狭まるため、フィックス解計算部30においても、高精度にフィックス解を計算することができる。フィックス解計算部30は、計算されたフィックス解を測位解として出力する。
【0043】
次に、図10を参照して、本実施の形態の測位装置10において実行される測位処理ルーチンについて説明する。
【0044】
ステップ100で、エポック毎にGPS受信機12で受信したGPS情報及びINS装置14で取得したINS情報を取得して、Mエポックデータ記憶部22記憶する。
【0045】
次に、ステップ102で、Mエポックデータ記憶部22に記憶されたMエポック分のGPS情報及びINS情報を取得し、(3)式に示すGPS観測値の観測方程式、及び(5)式に示すINS観測値の観測方程式を導出する。また、このときのGPS観測値の共分散及びINS観測値の共分散も(4)式及び(6)式により求める。そして、(3)式と(5)式とを統合して、(7)式に示すGPS−INS観測方程式を導出する。また、(4)式のGPS観測値の共分散、及び(6)式のINS観測値の共分散を統合して、(8)式に示すGPS−INS観測値の共分散を得る。
【0046】
次に、ステップ104で、上記ステップ102で導出されたGPS−INS観測方程式を解いて、(9)式により自車両の状態(位置,N,θ)xのフロート解を計算し、その共分散Qxを(10)により計算する。
【0047】
次に、ステップ106で、(11)式により残差rを計算し、残差rが所定の閾値以上となるGPS衛星、すなわち、つじつまの合わないGPS衛星の有無を判定する。次に、ステップ108で、上記ステップ106での判定結果に基づいて、上記ステップ104で計算されたフロート解に整合性があるか否かを判定する。上記ステップ106で、つじつまの合わないGPS衛星が存在すると判定された場合には、本ステップで整合性なしと判定されて、ステップ110へ移行する。
【0048】
ステップ110では、上記ステップ102で取得したMエポック分のGPS情報のうち、上記ステップ106でつじつまが合わないと判定されたGPS衛星から受信したGPS情報を排除して、再度、(7)式のGPS−INS観測方程式を導出して、ステップ104へ戻る。
【0049】
上記ステップ108で、フロート解に整合性あり、すなわち、つじつまの合わないGPS衛星が存在しないと判定された場合には、ステップ112へ移行し、上記ステップ104で計算された自車両の位置xのフロート解から、従来既知の手法を用いてフィックス解を計算する。計算されたフィックス解を測位解として出力して、測位処理ルーチンを終了する。
【0050】
図11(a)に、1エポック分のデータを用いた測位結果(比較例)、(b)に、カルマンフィルタを用いた測位結果(比較例)、及び(c)に、本実施の形態の測位装置による測位結果の一例を示す。白丸が各エポックでの車両位置のフロート解であり、黒丸がフィックス解である。ratio testで除かれたフィックス解は表示していない。本実施の形態の測位装置では、他の比較例と比較して、より多くの場所で高精度なフィックス解を測位できていることがわかる。
【0051】
以上説明したように、本実施の形態の測位装置によれば、GPS情報に基づいて波数Nのフロート解及びその波数Nを用いて得られる自車両位置xのフロート解を求める際に、Mエポック分のINS情報に基づいて推定される自車両の走行軌跡で拘束する。すなわち、Mエポック分の走行軌跡とつじつまの合うフロート解を求めることにより、フロート解の精度を向上させ、フィックス解の探索範囲を狭める。これにより、一周波数GPS受信機を用いた場合でも、精度良く測位解を得ることができる。
【0052】
なお、上記実施の形態では、波数のフロート解とそのフロート解から得られる自車両の位置とが同時に計算できる観測方程式を導出する場合について説明したが、波数のフロート解のみを求める観測方程式を導出し、波数のフィックス解を求めた後に、この波数のフィックス解を用いて自車両の位置を計算するようにしてもよい。
【0053】
また、上記実施の形態では、衛星選択部でつじつまの合わないGPS衛星を選択し、そのGPS衛星からのGPS情報を排除する場合について説明したが、そのGPS衛星からの全てのGPS情報を排除するのではなく、つじつまの合わないGPS情報のみを排除するようにしてもよい。
【符号の説明】
【0054】
10 測位装置
12 GPS受信機
14 INS装置
16 コンピュータ
22 Mエポックデータ記憶部
24 方程式導出部
26 フロート解計算部
28 衛星選択部
30 フィックス解計算部
【特許請求の範囲】
【請求項1】
複数のGPS衛星各々から送信された擬似距離及び位相を含むGPS情報各々と、自装置が搭載された移動体の移動量を含むINS情報とを、エポック毎に取得する取得手段と、
前記取得手段により取得したGPS情報及びINS情報を観測値とし、かつ前記複数のGPS衛星各々と前記移動体間における前記GPS情報の搬送波の波数のフロート解を該GPS衛星毎に求めるための観測方程式であって、前記波数のフロート解の範囲が、3エポック以上の前記INS情報に基づいて推定された前記移動体の移動軌跡で拘束された観測方程式を導出する導出手段と、
前記導出手段により導出された観測方程式を解いて、前記GPS衛星毎の波数のフロート解を計算する計算手段と、
前記計算手段で計算されたGPS衛星毎の波数のフロート解各々に基づいて、最も整合性が高い波数のフィックス解を計算し、該波数のフィックス解から得られる前記複数のGPS衛星各々と前記移動体との距離に基づいて、前記移動体の位置を測位する測位手段と、
を含む測位装置。
【請求項2】
前記導出手段により導出された観測方程式に基づいて、前記移動軌跡との残差が予め定めた閾値以上となる擬似距離を含むGPS情報、または該GPS情報を送信したGPS衛星から送信された全てのGPS情報を、前記取得手段により取得したGPS情報から排除して、前記導出手段により、再度観測方程式が導出されるように制御する制御手段を含む請求項1記載の測位装置。
【請求項3】
コンピュータを、
複数のGPS衛星各々から送信された擬似距離及び位相を含むGPS情報各々と、自装置が搭載された移動体の移動量を含むINS情報とを、エポック毎に取得する取得手段、
前記取得手段により取得したGPS情報及びINS情報を観測値とし、かつ前記複数のGPS衛星各々と前記移動体間における前記GPS情報の搬送波の波数のフロート解を該GPS衛星毎に求めるための観測方程式であって、前記波数のフロート解の範囲が、3エポック以上の前記INS情報に基づいて推定された前記移動体の移動軌跡で拘束された観測方程式を導出する導出手段、
前記導出手段により導出された観測方程式を解いて、前記GPS衛星毎の波数のフロート解を計算する計算手段、及び
前記計算手段で計算されたGPS衛星毎の波数のフロート解各々に基づいて、最も整合性が高い波数のフィックス解を計算し、該波数のフィックス解から得られる前記複数のGPS衛星各々と前記移動体との距離に基づいて、前記移動体の位置を測位する測位手段
として機能させるための測位プログラム。
【請求項1】
複数のGPS衛星各々から送信された擬似距離及び位相を含むGPS情報各々と、自装置が搭載された移動体の移動量を含むINS情報とを、エポック毎に取得する取得手段と、
前記取得手段により取得したGPS情報及びINS情報を観測値とし、かつ前記複数のGPS衛星各々と前記移動体間における前記GPS情報の搬送波の波数のフロート解を該GPS衛星毎に求めるための観測方程式であって、前記波数のフロート解の範囲が、3エポック以上の前記INS情報に基づいて推定された前記移動体の移動軌跡で拘束された観測方程式を導出する導出手段と、
前記導出手段により導出された観測方程式を解いて、前記GPS衛星毎の波数のフロート解を計算する計算手段と、
前記計算手段で計算されたGPS衛星毎の波数のフロート解各々に基づいて、最も整合性が高い波数のフィックス解を計算し、該波数のフィックス解から得られる前記複数のGPS衛星各々と前記移動体との距離に基づいて、前記移動体の位置を測位する測位手段と、
を含む測位装置。
【請求項2】
前記導出手段により導出された観測方程式に基づいて、前記移動軌跡との残差が予め定めた閾値以上となる擬似距離を含むGPS情報、または該GPS情報を送信したGPS衛星から送信された全てのGPS情報を、前記取得手段により取得したGPS情報から排除して、前記導出手段により、再度観測方程式が導出されるように制御する制御手段を含む請求項1記載の測位装置。
【請求項3】
コンピュータを、
複数のGPS衛星各々から送信された擬似距離及び位相を含むGPS情報各々と、自装置が搭載された移動体の移動量を含むINS情報とを、エポック毎に取得する取得手段、
前記取得手段により取得したGPS情報及びINS情報を観測値とし、かつ前記複数のGPS衛星各々と前記移動体間における前記GPS情報の搬送波の波数のフロート解を該GPS衛星毎に求めるための観測方程式であって、前記波数のフロート解の範囲が、3エポック以上の前記INS情報に基づいて推定された前記移動体の移動軌跡で拘束された観測方程式を導出する導出手段、
前記導出手段により導出された観測方程式を解いて、前記GPS衛星毎の波数のフロート解を計算する計算手段、及び
前記計算手段で計算されたGPS衛星毎の波数のフロート解各々に基づいて、最も整合性が高い波数のフィックス解を計算し、該波数のフィックス解から得られる前記複数のGPS衛星各々と前記移動体との距離に基づいて、前記移動体の位置を測位する測位手段
として機能させるための測位プログラム。
【図1】

【図2】
【図4】
【図5】
【図6】
【図8】
【図10】
【図3】
【図7】
【図9】
【図11】
【図2】
【図4】
【図5】
【図6】
【図8】
【図10】
【図3】
【図7】
【図9】
【図11】
【公開番号】特開2013−108960(P2013−108960A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−256648(P2011−256648)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
[ Back to top ]