
無線ナビゲーション信号を処理する方法
【課題】未処理コードおよび位相の測定からスタートし、(地上のまたは軌道内の)受信機によって行われる微分されていない測定値の位相の不確定性を解くこと
【解決手段】衛星コンステレーションのうちの衛星の各々は、別々の周波数にて、第1無線ナビゲーション信号および第2無線ナビゲーション信号を送信する。衛星を見ることができる基準ネットワークのうちの各局は、衛星から発信された2つの信号の各々に対するコードおよび位相の非微分測定を実行し、これらの測定値から、ワイドレーンの不確定性の未処理値を推定する。この未処理値に基づき、ネットワークにおいて、衛星の内部遅延およびワイドレーンの不確定性の全値を決定する。この方法は、前記基準受信機のレベルにおいて、前記第1および第2無線ナビゲーション信号を受信するステップと、前記基準受信機により、前記第1および第2の受信された信号の各々に対し、非微分コード測定および非微分位相測定を実行するステップと、非微分コード測定値および非微分位相測定値から前記ワイドレーンの位相不確定性の未処理値を計算するステップと、前記基準受信機に対する前記未処理値に基づき、ワイドレーンの位相不確定性の整数値と共に衛星内部遅延を固定するステップとを備える。
【解決手段】衛星コンステレーションのうちの衛星の各々は、別々の周波数にて、第1無線ナビゲーション信号および第2無線ナビゲーション信号を送信する。衛星を見ることができる基準ネットワークのうちの各局は、衛星から発信された2つの信号の各々に対するコードおよび位相の非微分測定を実行し、これらの測定値から、ワイドレーンの不確定性の未処理値を推定する。この未処理値に基づき、ネットワークにおいて、衛星の内部遅延およびワイドレーンの不確定性の全値を決定する。この方法は、前記基準受信機のレベルにおいて、前記第1および第2無線ナビゲーション信号を受信するステップと、前記基準受信機により、前記第1および第2の受信された信号の各々に対し、非微分コード測定および非微分位相測定を実行するステップと、非微分コード測定値および非微分位相測定値から前記ワイドレーンの位相不確定性の未処理値を計算するステップと、前記基準受信機に対する前記未処理値に基づき、ワイドレーンの位相不確定性の整数値と共に衛星内部遅延を固定するステップとを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、衛星による無線ナビゲーションシステムまたは測位の技術に関し、特に、かかるシステムの衛星が送信した無線ナビゲーション信号を処理する方法に関する。
【背景技術】
【0002】
衛星測位システム、例えばGPS(全地球測位システム)、ガリレオ、GLONASS、QZSS、コンパス、IRNSSおよびその他のシステムは、「拡散スペクトラム変調」と称される変調された無線ナビゲーション信号を使用している。これら信号は、基本的には、周期的に繰り返される数値シーケンスから形成された疑似ランダムコードを搬送しており、このランダムコードの主な機能は、コード分割多重アクセス(CDMA)を可能にし、衛星が送信する信号の伝搬時間の測定値を供給することにある。ちなみに無線ナビゲーション信号は、ペイロードを搬送することもできる。
【0003】
無線ナビゲーション信号は、(搬送波の)中心周波数を変調することによって生成される。GPSの場合、無線ナビゲーション信号は、1575.42MHzを中心とする周波数バンドL1、および1227.6MHzを中心とする周波数バンドL2で送信される。GPSが更新されたときに、1176.45MHzを中心とするバンドL5が追加された。ガリレオコンステレーションの衛星は、バンドE2−L1−E1(中間バンドL1の部分は、GPSのバンドと同一である)、E5a(このバンドはガリレオ用語に従えば、GPS向けのバンドL5を示す)、(1207.14MHzを中心とする)E5bおよび(1278.75MHzを中心とする)E6で送信を行う。
【発明の概要】
【発明が解決しようとする課題】
【0004】
受信機で実行できる基本的測定として、コードの測定と、搬送波の位相の測定とを挙げることができる。これら基本的測定は、当然ながら相互に組み合わせることができる。コード測定は、1mまで正確であるが、他方、位相測定は数mmまで正確である。しかしながら位相の測定には衛星による送信と受信機との間の搬送波の位相差の実数部分しか提供できないという欠点がある。従って、位相の測定は衛星と受信機との間の完全サイクルの数が当初未知であるという点で不確定である。位相測定の精度からの利益を享受できるようにするには、受信機でこれら位相測定固有の不確定性を解かなければならない。
【0005】
位相の不確定性は、通常、位相測定値を微分(1回の微分または2回の微分)をすることによって解かれる。例えばM.J.GaborおよびR.S.Nerem共著論文「衛星−衛星間の1回の差分を使ったGPS搬送波の位相の不確定性の解法方法」(ION GPS、’99、1999年9月14〜17日、テネシー州ナッシュビル)に、衛星間の1回差分を利用する方法が記載されている。この微分は、複数の測定に共通する誤差の(モデル化されていない)原因を除くことができるようにし、よって完全な情報を明らかにし、これによってこの情報を考慮すると性能を更に改善できる。しかしながら、この完全情報は位相の1つの基本的不明確さまたは複数の基本的な不確定性の差から成り、一般に位相の基本的不確定性をトレースできるようにするものではない。
【0006】
本発明の目的は、未処理コードおよび位相の測定からスタートし、(地上のまたは軌道内の)受信機によって行われる微分されていない測定値の位相の不確定性を解くための方法を提案することにある。本発明によってローカルネットワークまたはグローバルネットワーク上で測定値の1回または複数回の微分を必ずしも使用しないで、位相の無不確定性の値(単数または複数)を受信機が独立して見つけることを可能にするものである。
【課題を解決するための手段】
【0007】
一般に、本発明は、2つの要素を含む。第1に、本発明は基準局のネットワークのレベルで作動する方法を含み、この方法の間、追加情報を決定し、ネットワークに属していないユーザーの受信機は、この追加情報を用いて位相の不確定性を解くことができる。第2に、本発明は基準局のネットワークによって発生され、任意のタイプの通信経路によって提供される追加情報を使用するネットワークの一部ではない受信機のレベルで作動する方法を含む。
【0008】
第1の様相によれば、本発明は、少なくとも1つの局を含む局(基準受信機)のレベルでは無線ナビゲーション信号のコードと位相の間の時間遅れおよび/または周波数間バイアスおよび/または補償されていないそれぞれの周波数の位相中心の差に対応する衛星の遅延を決定することに関する。次の記載では、衛星の各々が2つの異なる周波数バンドで少なくとも2つの無線ナビゲーション信号を送信する無線ナビゲーション衛星のコンステレーションのケースを仮定する。従って、各衛星は第1の周波数で少なくとも1つの第1の無線ナビゲーション信号を送信し、更に第1の周波数と異なる第2の周波数で第2の無線ナビゲーション信号を送信する。1つの衛星を見ることができる(すなわち衛星は水平線よりも上に位置する)各局は、対応する衛星から到達する2つの信号の各々に対してコードおよび位相測定を実行でき、ワイドレーンの不確定性に関する未処理の値を推定できる。このワイドレーンの不確定性に関する未処理の値に基づき、基準ネットワークに対する衛星内部の遅延およびワイドレーンの不確定性の完全値を決定する。このケースにおけるコードおよび位相の測定値は、非微分測定値(局間でも、または衛星間でも微分されていない値)となっている。衛星内部の遅延は複数の受信機の測定値に同じように影響を与え、従って2つの受信機の間の測定値を微分することによって、衛星内部の遅延が解消されることは明らかである。従って、測定値の微分に基づく方法は、衛星内部の遅延(単数または複数)を知らなくてもよい。これと対照的に、本発明に係わる方法は、微分されていない測定値を使用し、衛星内部の遅延を正確に決定することを提案するものである。
【0009】
本発明は、特に次のステップ、すなわち
- 前記基準受信機のレベルにおいて、前記第1および第2無線ナビゲーション信号を受信するステップと、
- 前記基準受信機により、前記第1および第2の受信された信号の各々に対し、非微分コード測定および非微分位相測定を実行するステップと、
- 非微分コード測定値および非微分位相測定値から前記ワイドレーンの位相の不確定性の未処理値を計算するステップと、
- 前記基準受信機に対する前記未処理値に基づき、ワイドレーンの位相の不確定性の整数値と共に衛星内部遅延を固定するステップとを備える。
【0010】
それぞれの衛星から発信される第1および第2信号の各々に対して、それぞれの基準受信機により実行されたコードおよび位相測定から、利用できる衛星と局の各組み合わせ(特定の日に各局から、すべての衛星のうちの一部しか見えないことがある)に対してワイドレーンの位相の不確定性の整数値と共に、衛星内部の遅延時間を決定することが好ましい。この決定は、自己コヒーレントな衛星の遅延時間と局の遅延時間との一組が得られるように、基準ネットワークのレベルでコヒーレントに行われる。
【0011】
本発明の第2の特徴は、基準ネットワークのレベルにて、精密衛星クロックを決定することに関する。この方法では、前記単数または複数の基準受信機のレベルで、前記第1および第2無線ナビゲーション信号を受信し、前記単数または複数の基準受信機により、前記受信した第1および第2信号の各々に対し、非微分コード測定および非微分位相測定を実行し、前記非微分コード測定値、前記非微分位相測定値、前記ワイドレーンの不確定性の1つまたは複数の整数値、および前記衛星と前記単数または複数の基準受信機との間の伝搬距離のモデルから、前記衛星の衛星クロック値を決定する。
ワイドレーンの不確定性の整数値を得るには、衛星内部遅延を得るか、またはこれら遅延を上記のように計算し、衛星内部遅延の助けにより、ワイドレーンの不確定性の未処理測定値から整数値を推定する。伝搬距離のモデルは、特に衛星の精密軌道、対流圏遅延、潮汐を考慮した局の位置などを生じさせることができる。かかる軌道が入手できる場合、入力として精密軌道を提供できる。これとは異なり、フィルタリング中に精密軌道を推定してもよい。
【0012】
局のグループ(一般に50局)でのコードおよび位相の測定値の組からフィルタリングによって衛星クロック値、必要によりコンステレーションの衛星の精密軌道を推定することが好ましい。このタイプのフィルタリング中に調節されるモデルパラメータは、各エポックでの放送クロックおよび受信機、局ごとに1日のうちでゆっくり変化する対流圏バイアス、およびナローレーンの不確定性(各通過時に識別されるパラメータ)である。前記クロック値を決定する前記ステップは、好ましくは非微分コード測定値、非微分位相測定値およびワイドレーンの不確定性の1つまたは複数の整数値により、前記伝搬距離に対するモデルパラメータを推定し、その後、前記推定されたパラメータから前記クロック値を推定することを含む。
【0013】
以下、詳細に説明する簡単なフィルタリングアルゴリズムによれば、まずモデルのパラメータ、例えば対流圏遅延および/または精密軌道などを充分な精度で識別するように、浮動する不確定性を有する一連の問題を解く。次に、ナローレーンの不確実性は位相測定値、識別されたモデルおよび衛星のクロック、並びに受信機のクロックの関数として表わされる。
【0014】
衛星遅延を決定する際に、以前ワイドレーンの不確定性を識別したという事実は、衛星クロックを決定する際に解くべき問題は、従来のアプローチのように2つではなく、通過ごとに1つの不確定性しか含まないということを意味する。整数値を生成するのに必要なモデルの精度は、前に不確定性が分かっていないケースよりもかなり低い。特に、対流圏遅延は、二周波数の測定値を組み合わせることによって解消できるので、対流圏遅延に対するモデルは不要である。電離層遅延はモデルの一部でないという事実は、従来の方法と比較して推定すべきパラメータの数を少なくする。このことは、本発明のこの特徴に係わる方法のかなりの利点を提供できる。
【0015】
適当な手段、例えば地上放送、(例えばSBASタイプの衛星からの、またはシステムがデータを含む信号を有する場合には無線ナビゲーション衛星自体からの)衛星放送、(例えば電話中継局からの)携帯電話により、インターネットを通し、シュードライトにより、WiFiにより、ブルートゥースなどにより、ユーザーに対し、衛星の遅延およびクロック、並びに可能な場合には衛星の精密軌道を(暗号化された状態または暗号化されていない状態で)放送できる。衛星遅延は、基本的には時間に対して一定のままであることに留意すべきである。したがって、この衛星遅延は受信機内部のデータベース内にセーブでき、受信機は必要なときにこのデータベースから衛星遅延を得ることができる。他方、精密軌道および衛星のクロックは、エポックごとに変化するデータであり、したがってリアルタイムで放送することが好ましい。
【0016】
更に本発明は、任意のタイプの受信機(例えばエンドユーザーの受信機またはネットワーク局の受信機)のレベルで行われる方法に関する。受信機は、第1および第2無線ナビゲーション信号を受信し、受信した第1および第2信号の各々に対し、非微分コード測定および非微分位相測定を実行し、次に、非微分コード測定値および非微分位相測定値から位相のワイドレーンの不確定性の未処理値を計算し、当該衛星内部遅延を得る。未処理値および内部衛星遅延を使って、ワイドレーンの不確定性の整数値を決定する。
【0017】
受信機のレベルで行われる方法の好ましい実施形態によれば、受信機は、当該衛星に対する精密輝度値および衛星クロック値を得て、非微分コード測定値、非微分位相測定値、ワイドレーンの不確定性の前記整数値、前記軌道値、前記衛星クロック値および前記衛星と前記受信機との間の伝搬距離のモデルからフィルタリングにより、ナローレーンの不確定性の整数値を計算する。
【発明の効果】
【0018】
受信機の内部または外部データベースから得てもよいし、またはSBAS衛星によって放送されるかまたは無線電話ネットワークによって送られた、または地上放送によって放送された、または通信の他の任意の適当な手段、例えば上記の手段によって放送された(暗号化されたもしくは暗号化されていない)メッセージから、衛星内部遅延を得ることができると理解すべきである。これら精密衛星軌道および衛星クロックは、SBAS衛星によって放送された、または無線電話ネットワークにより送られた、または地上放送もしくは他の任意の適当な通信手段によって放送されたメッセージから抽出することが好ましい。
添付図面を参照し、以下に示す好ましい説明のための実施形態の好ましい詳細な記載から、本発明の上記以外の特徴および利点が明らかとなろう。
【図面の簡単な説明】
【0019】
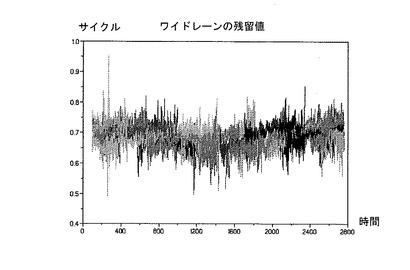
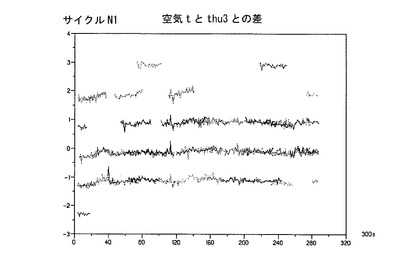
【図1】コードおよび位相の測定値から計算されたワイドレーンな不確定性の未処理の値を示す。
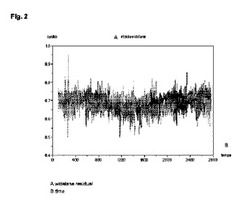
【図2】衛星内部の遅延時間により、ワイドレーンな不確定性の未処理の値を補正した後に得られる残留値を示す。
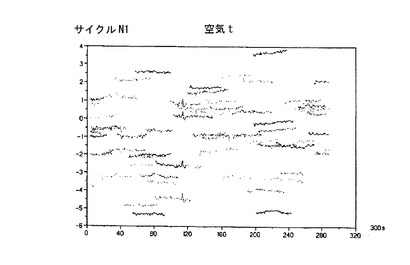
【図3】従来のフィルタリングによって得られるナローレーンの不確定性の残留値を示す。
【図4】ネットワークでの不確定性をフィルタリングし、解くことによって得られるナローレーンの不確定性の残留値を示す。
【発明を実施するための形態】
【0020】
受信機から見ることができる各衛星に対し、衛星のレベルでは、周波数f1およびf2に対し、それぞれ以下P1およびP2と称す微分されていない(不確定でない)2つのコード測定値およびL1およびL2と称す位相の微分されていない(不確定な)2つの測定値が存在する。
【0021】
以下、次の表示を使用する。
【数1】

ここで、cは光速を示す。GPSシステムのバンドL1およびL2に対し、例えばf1=154f0であり、f2=120f0である(ここでf0=10.23MHzである)。コード測定値P1、P2を長さの単位で表記し、位相測定値L1、L2をサイクルで表記することにする。
【0022】
微分されていないコードおよび位相の測定値は、次の式を満たす。
【数2】
ここで、
- Dは、幾何学的伝搬距離、対流圏効果、位相中心からの差の効果、位相の幾何学的回転の効果(位相のワインドアップ)、相対性効果などを含む量を示し、
- eは、周波数の二乗の関数として変化し、位相観測値とコード観測値の電離圏フリーの組み合わせによって除去される電離層遅延項を含み、
- Δτ=τrec−τemeは、送信機と受信機との間の周波数間バイアス(TGD)の微分を含み、
- Δc=crec−cemeは、送信機と受信機との間のそれぞれの周波数の位相の中心/位相の無電離中心からの偏差値の微分を含み、
- Δh=hrec−hemeは、受信機のクロックhrecと送信機のクロックhemeとの間の差を示し、
- Δb=brec−bemeは、受信機のバイアスbrecと送信機のバイアスbemeとの差を示し(これらバイアスbrecおよびbemeは、コードと位相との間のクロック差に対応する)、
- N1、N2は、2つの搬送波の(整数の)位相の不確定性を示す。
【0023】
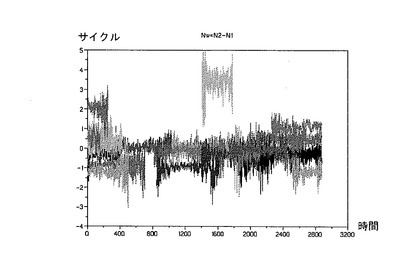
衛星による信号の送信と、受信機による受信との間の(不確定でない)位相差は、L1+N1およびL2+N2と記載され、ここでN1およびN2は、必要な(整数)不確定性を示し、Nw=N2−N1(Nwは(整数の)ワイドレーンの不確定性である)である。
【0024】
コードの対流圏遅延は、次の式によって計算される。
【数3】
【0025】
【数4】
これら値は、測定値のみによって決まる。
【0026】
【0027】
【数5】
【0028】
【数6】
ここで、λwは、1/λw=1/λ1−1/λ2によって定められ、ワイドレーンの波長(バンドL1およびL2の場合、約87cm)に対応する。図1は、受信機の(非微分)コードおよび位相測定の結果得られたワイドレーンの不確定性の未処理値の曲線の一例を示す。Nwに対し、次のフォームの式を見つけることができる。
【数7】
ルの何分の1より小さい)ノイズを示す。
【0029】
基準ネットワークのレベルにおける衛生内部遅延時間の決定
少なくとも1つの局(1台の基準受信機)を含む基準ネットワークのレベルにおいて、
は、次のように、整数値と、測定から独立しており、衛星内部遅延時間および受信機に固有の2つの別の低速で変化し得る値とに分解できる。
【数8】
【0030】
【0031】
【0032】
に分解される。コンステレーションのすべての衛星および基準ネットワークのすべての局に対して、これらステップが繰り返される。すべての基準ネットワークにわたってコヒーレントである値μemeが最終的に得られる。これら値μemeは、少なくとも1日の間、一定であると見なすことができる。
基準ネットワークのレベルにおける衛星クロックの決定
【0033】
ワイドレーンの不確定性を決定した後、少なくとも1つの不確定性(N1またはN2)が未知のままである。
【0034】
ワイドレーンの不確定性は、既知であるので、特に必要なモデルの精度に関して位相の不確定性N1またはN2を大幅に、より容易に解くことができる。
【0035】
コードの測定値P1およびP2は、送信ポイントと受信ポイントとの間の幾何学的距離、電離層効果、対流圏効果、放送クロックおよび受信クロックを含む複数のパラメータによって決まる。残りの不確定性を識別するには、これら変動値に対して充分精密なモデルが必要とされ、クロックは処理すべき受信機のネットワークに対して、グローバルな解が必要となる。
【0036】
次のような式が成り立つ。
【数9】
とによりまたはコードおよび位相によって推定される量N1の、通過時または通過の一部で起こり得る異常値を排除するロバストな推定子により得られるN1の丸められた、浮動推定値である。
【数10】
【0037】
にある。
【0038】
コードおよび位相の測定された量を、次の式によりモデル化された幾何学的距離Dにリンクできる。
【数11】
よって識別される。
【0039】
量Dは、次の要素に関係する伝搬距離の完全モデルに対応する。
- 二周波数位相の中心の組み合わせ:この組み合わせは、アンテナの位相中心(L1およびL2)の受信機と送信機の電離層フリーな組み合わせである。
- 衛星の精密な軌道
- 衛星の高度の法則(ヨーイング時の公称高度の法則)
- 衛星の偏心率に起因する相対性効果
- (地上の潮汐のモデルによる)受信機の位置の精密モデル
- 対流圏遅延のモデル(シュタナーグ(Stanag)により定義されるようなサイトに依存する折りたたみ関数による局ごとの垂直遅延)
- ワインドアップのモデル(位相の幾何学的回転)
【0040】
フィルタによって推定されるパラメータとして次のパラメータがある。
- エポックごとの衛星および局のクロックhemeおよびhrec
- 各通過に対する(整数であるとする制限を有しない)一定の位相の不確定性δN1
- 時間に対する低速変動(一般に4時間ごとに一定のセグメント)を有する、各局に対する垂直対流圏遅延
- (入力データとして精密軌道が提供されない場合の)衛星の精密軌道
【0041】
フィルタを最小二乗のフォームにしてもよいし、またはリアルタイムの処理に、よりコンパーチブルなカルマンフォームとすることができる。フィルタリングのための入力値は、それぞれのノイズを有する電離層フリーなコードおよび電離層フリーな位相の非微分値であり、これら値は、コードに対しては1mのオーダーであり、位相に対しては1cmのオーダーである。
【0042】
の推定値を計算する。図1には、これら残留値δN1の数例が示されている。(フィルタリング中に整数に対する仮定を行わないときにはこれらδN1は、整数ではない。)
【0043】
これらフィルタリングステップは、D項(幾何学的モデル)を特にクリーンに計算するように働く。その後、このステップで識別されるクロックは、初期値として使用され、よってクロックのわずかな変動に対する作業を行うことが可能となるが、このことは不可欠なものではない。
【0044】
フィルタリングによって値Dを得た後に、基準ネットワークのレベルでδN1の整数値を探す。再び次の式を使用する。
【数12】
【0045】
ここで、Dはフィルタリングによって発見された値をとる。この式は、グローバルな非観察可能性を有することに注目する。実際に、次の有効式を保つことにより、所定の送信機に関する値δN1およびそれに対応するhemeおよび/またはhrecをシフトできる。
【数13】
【0046】
このステップでは、クロックを基準クロックとして見なす第1局(第1基準受信機)からスタートし、その後、ネットワークの全体を計算するように局を順次追加する繰り返しプロセスによって、値hemeを計算する。
【0047】
第1局に対し、δN1=0およびhrec=0と設定する。この選択は任意であり、この結果、式(*)が証明されるように、第1の局から見える衛星に対するhemeの組が得られる。
【0048】
局の追加は次のように実行する。局を追加する前にhemeの組が既知である場合、通過ごとの整数値(δN1)および(追加された局のクロックhrecに対応する)各エポックにおける実数値の形態で表記しなければならない残留値δN1+hrec/λcを計算する。図2は、新しく追加された局に対する残留値δN1+hrec/λcを示す。
残留値は整数値だけ分離しており、最も近い整数値に対するそれらのシフトが同一であることが理解できよう。したがって、残留値と最も近い整数値との間のシフトはhrec/λcに対応し、整数値自体はδN1に対応することを確定できる。
【0049】
新しい局に対し、衛星のクロック、したがって残留値N1+hrec/λcは、通過の一部の間でしかアプリオリに既知でないと理解すべきである。しかしながらδN1が通過ごとに一定であるとき、このことを通過全体に拡張できる。ある局から所定の衛星を見ることができるエポックは、隣接局に対し、同じ衛星を見ることができるエポックに部分的にしか対応しない。局がより離間すればするほど、共通する観察時間も短くなる。このことは、後続局の少なくとも1つに、隣接局を常に加えることを意味する。
【0050】
最後に、ネットワーク局のすべてに対する通過のグループに関して、整数δN1の一組を識別する。次に、通過のグループおよび単独未知数としてhemeおよびhrecを有するネットワーク局のすべてに対して、式(*)を解くことができる。
【0051】
この章で記載したhemeに対する識別方法はオフラインで作動するが、当業者であれば、リアルタイムで作動する等価的な方法を実現する方法について知っているであろう。例えば新しい通過の到来ごとに整数の不確定性を識別し、この通過の充分な測定値を収集し、生成クロックに対する現在の解自体が整数であると仮定すると、測定残留値内に直接不確定性の整数値が生じる。
【0052】
(アイソレートされた)受信機のレベルでの位相の不確定性の解法
任意の受信機が、見ることのできる衛星のμemeを知れば、受信機はワイドレーンの不確定性を解くことができる。受信機は、非微分コードおよび位相測定を行い、よって(図1に示されている)ワイドレーンの不確定性の未処理値を探す。1回の通過(1回の通過の一部)の間で、ワイドレーンの不確定性の平均未処理値を計算し、次の式を解くことにより、整数のワイドレーンの不確定性Nwを推定する。
【数14】
ここで、μemeは、既知のパラメータである。受信機は利用できる任意の手段によりμemeの値を得ることができる。例えば外部データベース(例えばインターネットサイト)からこれら値をダウンロードできる。これら値は時間に対して極めてわずかにしか変化しないので、一旦入手できれば、これらを受信機内部に記憶することを条件に、極めて長い時間にわたって使用できる。図2は、それぞれ既知の衛星内部遅延μemeにより、図1のワイドレーンの不確定性の未処理値を補正した後に得られた残留値
の通過に共通する同じ値(必ずしも整数でない)(図示されているケースでは0.7)のまわりに発見されることが理解できよう。したがって、この共通値の端数部分はμrecを与え、他方、整数部分は整数のワイドレーンの不確定性Nwを与える。
【0053】
(アイソレートされた)受信機のレベルでのナローレーンの不確定性に対する解は、次の式に基づく。
【数15】
δN1を決定するには、受信機は衛星のクロックだけでなく、所定の観察時案の間の精密な軌道(これら精密な軌道はDに対するモデルの一部である)も知らなければならない。これら衛星のクロックおよび/または精密な軌道は、地上放送またはSBAS(衛星をベースとする補強システム)衛星から放送することが望ましい。
【0054】
第1に、受信機は上記のようなモデルに類似するモデルに基づき、フィルタリングによりDの値を決定する。Dに対するこの計算ステップの間、受信機は一般に静止状態に留まっていなければならない。第2に、受信機は受信機のクロックおよびδN1を推定する。
N2に対する値に到達する。
【技術分野】
【0001】
本発明は、衛星による無線ナビゲーションシステムまたは測位の技術に関し、特に、かかるシステムの衛星が送信した無線ナビゲーション信号を処理する方法に関する。
【背景技術】
【0002】
衛星測位システム、例えばGPS(全地球測位システム)、ガリレオ、GLONASS、QZSS、コンパス、IRNSSおよびその他のシステムは、「拡散スペクトラム変調」と称される変調された無線ナビゲーション信号を使用している。これら信号は、基本的には、周期的に繰り返される数値シーケンスから形成された疑似ランダムコードを搬送しており、このランダムコードの主な機能は、コード分割多重アクセス(CDMA)を可能にし、衛星が送信する信号の伝搬時間の測定値を供給することにある。ちなみに無線ナビゲーション信号は、ペイロードを搬送することもできる。
【0003】
無線ナビゲーション信号は、(搬送波の)中心周波数を変調することによって生成される。GPSの場合、無線ナビゲーション信号は、1575.42MHzを中心とする周波数バンドL1、および1227.6MHzを中心とする周波数バンドL2で送信される。GPSが更新されたときに、1176.45MHzを中心とするバンドL5が追加された。ガリレオコンステレーションの衛星は、バンドE2−L1−E1(中間バンドL1の部分は、GPSのバンドと同一である)、E5a(このバンドはガリレオ用語に従えば、GPS向けのバンドL5を示す)、(1207.14MHzを中心とする)E5bおよび(1278.75MHzを中心とする)E6で送信を行う。
【発明の概要】
【発明が解決しようとする課題】
【0004】
受信機で実行できる基本的測定として、コードの測定と、搬送波の位相の測定とを挙げることができる。これら基本的測定は、当然ながら相互に組み合わせることができる。コード測定は、1mまで正確であるが、他方、位相測定は数mmまで正確である。しかしながら位相の測定には衛星による送信と受信機との間の搬送波の位相差の実数部分しか提供できないという欠点がある。従って、位相の測定は衛星と受信機との間の完全サイクルの数が当初未知であるという点で不確定である。位相測定の精度からの利益を享受できるようにするには、受信機でこれら位相測定固有の不確定性を解かなければならない。
【0005】
位相の不確定性は、通常、位相測定値を微分(1回の微分または2回の微分)をすることによって解かれる。例えばM.J.GaborおよびR.S.Nerem共著論文「衛星−衛星間の1回の差分を使ったGPS搬送波の位相の不確定性の解法方法」(ION GPS、’99、1999年9月14〜17日、テネシー州ナッシュビル)に、衛星間の1回差分を利用する方法が記載されている。この微分は、複数の測定に共通する誤差の(モデル化されていない)原因を除くことができるようにし、よって完全な情報を明らかにし、これによってこの情報を考慮すると性能を更に改善できる。しかしながら、この完全情報は位相の1つの基本的不明確さまたは複数の基本的な不確定性の差から成り、一般に位相の基本的不確定性をトレースできるようにするものではない。
【0006】
本発明の目的は、未処理コードおよび位相の測定からスタートし、(地上のまたは軌道内の)受信機によって行われる微分されていない測定値の位相の不確定性を解くための方法を提案することにある。本発明によってローカルネットワークまたはグローバルネットワーク上で測定値の1回または複数回の微分を必ずしも使用しないで、位相の無不確定性の値(単数または複数)を受信機が独立して見つけることを可能にするものである。
【課題を解決するための手段】
【0007】
一般に、本発明は、2つの要素を含む。第1に、本発明は基準局のネットワークのレベルで作動する方法を含み、この方法の間、追加情報を決定し、ネットワークに属していないユーザーの受信機は、この追加情報を用いて位相の不確定性を解くことができる。第2に、本発明は基準局のネットワークによって発生され、任意のタイプの通信経路によって提供される追加情報を使用するネットワークの一部ではない受信機のレベルで作動する方法を含む。
【0008】
第1の様相によれば、本発明は、少なくとも1つの局を含む局(基準受信機)のレベルでは無線ナビゲーション信号のコードと位相の間の時間遅れおよび/または周波数間バイアスおよび/または補償されていないそれぞれの周波数の位相中心の差に対応する衛星の遅延を決定することに関する。次の記載では、衛星の各々が2つの異なる周波数バンドで少なくとも2つの無線ナビゲーション信号を送信する無線ナビゲーション衛星のコンステレーションのケースを仮定する。従って、各衛星は第1の周波数で少なくとも1つの第1の無線ナビゲーション信号を送信し、更に第1の周波数と異なる第2の周波数で第2の無線ナビゲーション信号を送信する。1つの衛星を見ることができる(すなわち衛星は水平線よりも上に位置する)各局は、対応する衛星から到達する2つの信号の各々に対してコードおよび位相測定を実行でき、ワイドレーンの不確定性に関する未処理の値を推定できる。このワイドレーンの不確定性に関する未処理の値に基づき、基準ネットワークに対する衛星内部の遅延およびワイドレーンの不確定性の完全値を決定する。このケースにおけるコードおよび位相の測定値は、非微分測定値(局間でも、または衛星間でも微分されていない値)となっている。衛星内部の遅延は複数の受信機の測定値に同じように影響を与え、従って2つの受信機の間の測定値を微分することによって、衛星内部の遅延が解消されることは明らかである。従って、測定値の微分に基づく方法は、衛星内部の遅延(単数または複数)を知らなくてもよい。これと対照的に、本発明に係わる方法は、微分されていない測定値を使用し、衛星内部の遅延を正確に決定することを提案するものである。
【0009】
本発明は、特に次のステップ、すなわち
- 前記基準受信機のレベルにおいて、前記第1および第2無線ナビゲーション信号を受信するステップと、
- 前記基準受信機により、前記第1および第2の受信された信号の各々に対し、非微分コード測定および非微分位相測定を実行するステップと、
- 非微分コード測定値および非微分位相測定値から前記ワイドレーンの位相の不確定性の未処理値を計算するステップと、
- 前記基準受信機に対する前記未処理値に基づき、ワイドレーンの位相の不確定性の整数値と共に衛星内部遅延を固定するステップとを備える。
【0010】
それぞれの衛星から発信される第1および第2信号の各々に対して、それぞれの基準受信機により実行されたコードおよび位相測定から、利用できる衛星と局の各組み合わせ(特定の日に各局から、すべての衛星のうちの一部しか見えないことがある)に対してワイドレーンの位相の不確定性の整数値と共に、衛星内部の遅延時間を決定することが好ましい。この決定は、自己コヒーレントな衛星の遅延時間と局の遅延時間との一組が得られるように、基準ネットワークのレベルでコヒーレントに行われる。
【0011】
本発明の第2の特徴は、基準ネットワークのレベルにて、精密衛星クロックを決定することに関する。この方法では、前記単数または複数の基準受信機のレベルで、前記第1および第2無線ナビゲーション信号を受信し、前記単数または複数の基準受信機により、前記受信した第1および第2信号の各々に対し、非微分コード測定および非微分位相測定を実行し、前記非微分コード測定値、前記非微分位相測定値、前記ワイドレーンの不確定性の1つまたは複数の整数値、および前記衛星と前記単数または複数の基準受信機との間の伝搬距離のモデルから、前記衛星の衛星クロック値を決定する。
ワイドレーンの不確定性の整数値を得るには、衛星内部遅延を得るか、またはこれら遅延を上記のように計算し、衛星内部遅延の助けにより、ワイドレーンの不確定性の未処理測定値から整数値を推定する。伝搬距離のモデルは、特に衛星の精密軌道、対流圏遅延、潮汐を考慮した局の位置などを生じさせることができる。かかる軌道が入手できる場合、入力として精密軌道を提供できる。これとは異なり、フィルタリング中に精密軌道を推定してもよい。
【0012】
局のグループ(一般に50局)でのコードおよび位相の測定値の組からフィルタリングによって衛星クロック値、必要によりコンステレーションの衛星の精密軌道を推定することが好ましい。このタイプのフィルタリング中に調節されるモデルパラメータは、各エポックでの放送クロックおよび受信機、局ごとに1日のうちでゆっくり変化する対流圏バイアス、およびナローレーンの不確定性(各通過時に識別されるパラメータ)である。前記クロック値を決定する前記ステップは、好ましくは非微分コード測定値、非微分位相測定値およびワイドレーンの不確定性の1つまたは複数の整数値により、前記伝搬距離に対するモデルパラメータを推定し、その後、前記推定されたパラメータから前記クロック値を推定することを含む。
【0013】
以下、詳細に説明する簡単なフィルタリングアルゴリズムによれば、まずモデルのパラメータ、例えば対流圏遅延および/または精密軌道などを充分な精度で識別するように、浮動する不確定性を有する一連の問題を解く。次に、ナローレーンの不確実性は位相測定値、識別されたモデルおよび衛星のクロック、並びに受信機のクロックの関数として表わされる。
【0014】
衛星遅延を決定する際に、以前ワイドレーンの不確定性を識別したという事実は、衛星クロックを決定する際に解くべき問題は、従来のアプローチのように2つではなく、通過ごとに1つの不確定性しか含まないということを意味する。整数値を生成するのに必要なモデルの精度は、前に不確定性が分かっていないケースよりもかなり低い。特に、対流圏遅延は、二周波数の測定値を組み合わせることによって解消できるので、対流圏遅延に対するモデルは不要である。電離層遅延はモデルの一部でないという事実は、従来の方法と比較して推定すべきパラメータの数を少なくする。このことは、本発明のこの特徴に係わる方法のかなりの利点を提供できる。
【0015】
適当な手段、例えば地上放送、(例えばSBASタイプの衛星からの、またはシステムがデータを含む信号を有する場合には無線ナビゲーション衛星自体からの)衛星放送、(例えば電話中継局からの)携帯電話により、インターネットを通し、シュードライトにより、WiFiにより、ブルートゥースなどにより、ユーザーに対し、衛星の遅延およびクロック、並びに可能な場合には衛星の精密軌道を(暗号化された状態または暗号化されていない状態で)放送できる。衛星遅延は、基本的には時間に対して一定のままであることに留意すべきである。したがって、この衛星遅延は受信機内部のデータベース内にセーブでき、受信機は必要なときにこのデータベースから衛星遅延を得ることができる。他方、精密軌道および衛星のクロックは、エポックごとに変化するデータであり、したがってリアルタイムで放送することが好ましい。
【0016】
更に本発明は、任意のタイプの受信機(例えばエンドユーザーの受信機またはネットワーク局の受信機)のレベルで行われる方法に関する。受信機は、第1および第2無線ナビゲーション信号を受信し、受信した第1および第2信号の各々に対し、非微分コード測定および非微分位相測定を実行し、次に、非微分コード測定値および非微分位相測定値から位相のワイドレーンの不確定性の未処理値を計算し、当該衛星内部遅延を得る。未処理値および内部衛星遅延を使って、ワイドレーンの不確定性の整数値を決定する。
【0017】
受信機のレベルで行われる方法の好ましい実施形態によれば、受信機は、当該衛星に対する精密輝度値および衛星クロック値を得て、非微分コード測定値、非微分位相測定値、ワイドレーンの不確定性の前記整数値、前記軌道値、前記衛星クロック値および前記衛星と前記受信機との間の伝搬距離のモデルからフィルタリングにより、ナローレーンの不確定性の整数値を計算する。
【発明の効果】
【0018】
受信機の内部または外部データベースから得てもよいし、またはSBAS衛星によって放送されるかまたは無線電話ネットワークによって送られた、または地上放送によって放送された、または通信の他の任意の適当な手段、例えば上記の手段によって放送された(暗号化されたもしくは暗号化されていない)メッセージから、衛星内部遅延を得ることができると理解すべきである。これら精密衛星軌道および衛星クロックは、SBAS衛星によって放送された、または無線電話ネットワークにより送られた、または地上放送もしくは他の任意の適当な通信手段によって放送されたメッセージから抽出することが好ましい。
添付図面を参照し、以下に示す好ましい説明のための実施形態の好ましい詳細な記載から、本発明の上記以外の特徴および利点が明らかとなろう。
【図面の簡単な説明】
【0019】
【図1】コードおよび位相の測定値から計算されたワイドレーンな不確定性の未処理の値を示す。
【図2】衛星内部の遅延時間により、ワイドレーンな不確定性の未処理の値を補正した後に得られる残留値を示す。
【図3】従来のフィルタリングによって得られるナローレーンの不確定性の残留値を示す。
【図4】ネットワークでの不確定性をフィルタリングし、解くことによって得られるナローレーンの不確定性の残留値を示す。
【発明を実施するための形態】
【0020】
受信機から見ることができる各衛星に対し、衛星のレベルでは、周波数f1およびf2に対し、それぞれ以下P1およびP2と称す微分されていない(不確定でない)2つのコード測定値およびL1およびL2と称す位相の微分されていない(不確定な)2つの測定値が存在する。
【0021】
以下、次の表示を使用する。
【数1】
ここで、cは光速を示す。GPSシステムのバンドL1およびL2に対し、例えばf1=154f0であり、f2=120f0である(ここでf0=10.23MHzである)。コード測定値P1、P2を長さの単位で表記し、位相測定値L1、L2をサイクルで表記することにする。
【0022】
微分されていないコードおよび位相の測定値は、次の式を満たす。
【数2】
ここで、
- Dは、幾何学的伝搬距離、対流圏効果、位相中心からの差の効果、位相の幾何学的回転の効果(位相のワインドアップ)、相対性効果などを含む量を示し、
- eは、周波数の二乗の関数として変化し、位相観測値とコード観測値の電離圏フリーの組み合わせによって除去される電離層遅延項を含み、
- Δτ=τrec−τemeは、送信機と受信機との間の周波数間バイアス(TGD)の微分を含み、
- Δc=crec−cemeは、送信機と受信機との間のそれぞれの周波数の位相の中心/位相の無電離中心からの偏差値の微分を含み、
- Δh=hrec−hemeは、受信機のクロックhrecと送信機のクロックhemeとの間の差を示し、
- Δb=brec−bemeは、受信機のバイアスbrecと送信機のバイアスbemeとの差を示し(これらバイアスbrecおよびbemeは、コードと位相との間のクロック差に対応する)、
- N1、N2は、2つの搬送波の(整数の)位相の不確定性を示す。
【0023】
衛星による信号の送信と、受信機による受信との間の(不確定でない)位相差は、L1+N1およびL2+N2と記載され、ここでN1およびN2は、必要な(整数)不確定性を示し、Nw=N2−N1(Nwは(整数の)ワイドレーンの不確定性である)である。
【0024】
コードの対流圏遅延は、次の式によって計算される。
【数3】
【0025】
【数4】
これら値は、測定値のみによって決まる。
【0026】
【0027】
【数5】
【0028】
【数6】
ここで、λwは、1/λw=1/λ1−1/λ2によって定められ、ワイドレーンの波長(バンドL1およびL2の場合、約87cm)に対応する。図1は、受信機の(非微分)コードおよび位相測定の結果得られたワイドレーンの不確定性の未処理値の曲線の一例を示す。Nwに対し、次のフォームの式を見つけることができる。
【数7】
ルの何分の1より小さい)ノイズを示す。
【0029】
基準ネットワークのレベルにおける衛生内部遅延時間の決定
少なくとも1つの局(1台の基準受信機)を含む基準ネットワークのレベルにおいて、
は、次のように、整数値と、測定から独立しており、衛星内部遅延時間および受信機に固有の2つの別の低速で変化し得る値とに分解できる。
【数8】
【0030】
【0031】
【0032】
に分解される。コンステレーションのすべての衛星および基準ネットワークのすべての局に対して、これらステップが繰り返される。すべての基準ネットワークにわたってコヒーレントである値μemeが最終的に得られる。これら値μemeは、少なくとも1日の間、一定であると見なすことができる。
基準ネットワークのレベルにおける衛星クロックの決定
【0033】
ワイドレーンの不確定性を決定した後、少なくとも1つの不確定性(N1またはN2)が未知のままである。
【0034】
ワイドレーンの不確定性は、既知であるので、特に必要なモデルの精度に関して位相の不確定性N1またはN2を大幅に、より容易に解くことができる。
【0035】
コードの測定値P1およびP2は、送信ポイントと受信ポイントとの間の幾何学的距離、電離層効果、対流圏効果、放送クロックおよび受信クロックを含む複数のパラメータによって決まる。残りの不確定性を識別するには、これら変動値に対して充分精密なモデルが必要とされ、クロックは処理すべき受信機のネットワークに対して、グローバルな解が必要となる。
【0036】
次のような式が成り立つ。
【数9】
とによりまたはコードおよび位相によって推定される量N1の、通過時または通過の一部で起こり得る異常値を排除するロバストな推定子により得られるN1の丸められた、浮動推定値である。
【数10】
【0037】
にある。
【0038】
コードおよび位相の測定された量を、次の式によりモデル化された幾何学的距離Dにリンクできる。
【数11】
よって識別される。
【0039】
量Dは、次の要素に関係する伝搬距離の完全モデルに対応する。
- 二周波数位相の中心の組み合わせ:この組み合わせは、アンテナの位相中心(L1およびL2)の受信機と送信機の電離層フリーな組み合わせである。
- 衛星の精密な軌道
- 衛星の高度の法則(ヨーイング時の公称高度の法則)
- 衛星の偏心率に起因する相対性効果
- (地上の潮汐のモデルによる)受信機の位置の精密モデル
- 対流圏遅延のモデル(シュタナーグ(Stanag)により定義されるようなサイトに依存する折りたたみ関数による局ごとの垂直遅延)
- ワインドアップのモデル(位相の幾何学的回転)
【0040】
フィルタによって推定されるパラメータとして次のパラメータがある。
- エポックごとの衛星および局のクロックhemeおよびhrec
- 各通過に対する(整数であるとする制限を有しない)一定の位相の不確定性δN1
- 時間に対する低速変動(一般に4時間ごとに一定のセグメント)を有する、各局に対する垂直対流圏遅延
- (入力データとして精密軌道が提供されない場合の)衛星の精密軌道
【0041】
フィルタを最小二乗のフォームにしてもよいし、またはリアルタイムの処理に、よりコンパーチブルなカルマンフォームとすることができる。フィルタリングのための入力値は、それぞれのノイズを有する電離層フリーなコードおよび電離層フリーな位相の非微分値であり、これら値は、コードに対しては1mのオーダーであり、位相に対しては1cmのオーダーである。
【0042】
の推定値を計算する。図1には、これら残留値δN1の数例が示されている。(フィルタリング中に整数に対する仮定を行わないときにはこれらδN1は、整数ではない。)
【0043】
これらフィルタリングステップは、D項(幾何学的モデル)を特にクリーンに計算するように働く。その後、このステップで識別されるクロックは、初期値として使用され、よってクロックのわずかな変動に対する作業を行うことが可能となるが、このことは不可欠なものではない。
【0044】
フィルタリングによって値Dを得た後に、基準ネットワークのレベルでδN1の整数値を探す。再び次の式を使用する。
【数12】
【0045】
ここで、Dはフィルタリングによって発見された値をとる。この式は、グローバルな非観察可能性を有することに注目する。実際に、次の有効式を保つことにより、所定の送信機に関する値δN1およびそれに対応するhemeおよび/またはhrecをシフトできる。
【数13】
【0046】
このステップでは、クロックを基準クロックとして見なす第1局(第1基準受信機)からスタートし、その後、ネットワークの全体を計算するように局を順次追加する繰り返しプロセスによって、値hemeを計算する。
【0047】
第1局に対し、δN1=0およびhrec=0と設定する。この選択は任意であり、この結果、式(*)が証明されるように、第1の局から見える衛星に対するhemeの組が得られる。
【0048】
局の追加は次のように実行する。局を追加する前にhemeの組が既知である場合、通過ごとの整数値(δN1)および(追加された局のクロックhrecに対応する)各エポックにおける実数値の形態で表記しなければならない残留値δN1+hrec/λcを計算する。図2は、新しく追加された局に対する残留値δN1+hrec/λcを示す。
残留値は整数値だけ分離しており、最も近い整数値に対するそれらのシフトが同一であることが理解できよう。したがって、残留値と最も近い整数値との間のシフトはhrec/λcに対応し、整数値自体はδN1に対応することを確定できる。
【0049】
新しい局に対し、衛星のクロック、したがって残留値N1+hrec/λcは、通過の一部の間でしかアプリオリに既知でないと理解すべきである。しかしながらδN1が通過ごとに一定であるとき、このことを通過全体に拡張できる。ある局から所定の衛星を見ることができるエポックは、隣接局に対し、同じ衛星を見ることができるエポックに部分的にしか対応しない。局がより離間すればするほど、共通する観察時間も短くなる。このことは、後続局の少なくとも1つに、隣接局を常に加えることを意味する。
【0050】
最後に、ネットワーク局のすべてに対する通過のグループに関して、整数δN1の一組を識別する。次に、通過のグループおよび単独未知数としてhemeおよびhrecを有するネットワーク局のすべてに対して、式(*)を解くことができる。
【0051】
この章で記載したhemeに対する識別方法はオフラインで作動するが、当業者であれば、リアルタイムで作動する等価的な方法を実現する方法について知っているであろう。例えば新しい通過の到来ごとに整数の不確定性を識別し、この通過の充分な測定値を収集し、生成クロックに対する現在の解自体が整数であると仮定すると、測定残留値内に直接不確定性の整数値が生じる。
【0052】
(アイソレートされた)受信機のレベルでの位相の不確定性の解法
任意の受信機が、見ることのできる衛星のμemeを知れば、受信機はワイドレーンの不確定性を解くことができる。受信機は、非微分コードおよび位相測定を行い、よって(図1に示されている)ワイドレーンの不確定性の未処理値を探す。1回の通過(1回の通過の一部)の間で、ワイドレーンの不確定性の平均未処理値を計算し、次の式を解くことにより、整数のワイドレーンの不確定性Nwを推定する。
【数14】
ここで、μemeは、既知のパラメータである。受信機は利用できる任意の手段によりμemeの値を得ることができる。例えば外部データベース(例えばインターネットサイト)からこれら値をダウンロードできる。これら値は時間に対して極めてわずかにしか変化しないので、一旦入手できれば、これらを受信機内部に記憶することを条件に、極めて長い時間にわたって使用できる。図2は、それぞれ既知の衛星内部遅延μemeにより、図1のワイドレーンの不確定性の未処理値を補正した後に得られた残留値
の通過に共通する同じ値(必ずしも整数でない)(図示されているケースでは0.7)のまわりに発見されることが理解できよう。したがって、この共通値の端数部分はμrecを与え、他方、整数部分は整数のワイドレーンの不確定性Nwを与える。
【0053】
(アイソレートされた)受信機のレベルでのナローレーンの不確定性に対する解は、次の式に基づく。
【数15】
δN1を決定するには、受信機は衛星のクロックだけでなく、所定の観察時案の間の精密な軌道(これら精密な軌道はDに対するモデルの一部である)も知らなければならない。これら衛星のクロックおよび/または精密な軌道は、地上放送またはSBAS(衛星をベースとする補強システム)衛星から放送することが望ましい。
【0054】
第1に、受信機は上記のようなモデルに類似するモデルに基づき、フィルタリングによりDの値を決定する。Dに対するこの計算ステップの間、受信機は一般に静止状態に留まっていなければならない。第2に、受信機は受信機のクロックおよびδN1を推定する。
N2に対する値に到達する。
【特許請求の範囲】
【請求項1】
無線ナビゲーション衛星のコンステレーションのうちの1つの衛星から発信される無線ナビゲーション信号を処理するための方法であって、前記衛星は、第1の周波数の少なくとも1つの第1無線ナビゲーション信号および第1の周波数と異なる第2の周波数の第2無線ナビゲーション信号を放送し、前記衛星を見ることができる少なくとも1つの基準衛星を含む基準ネットワークのレベルにおいて、前記基準受信機に対する衛星内部遅延およびワイドレーンの不確定性の整数値を決定する方法において、この内部衛星遅延およびワイドレーンの不確定性の整数値のこの決定は、
前記基準受信機のレベルにおいて、前記第1および第2無線ナビゲーション信号を受信するステップと、
前記基準受信機により、前記第1および第2の受信された信号の各々に対し、非微分コード測定および非微分位相測定を実行するステップと、
非微分コード測定値および非微分位相測定値から前記ワイドレーンの位相不確定性の未処理値を計算するステップと、
前記基準受信機に対する前記未処理値に基づき、ワイドレーンの位相不確定性の整数値と共に衛星内部遅延を固定するステップとを備える、無線ナビゲーション信号を処理するための方法。
【請求項2】
前記基準ネットワークは、複数の基準受信機を含み、これら基準受信機からその都度前記コンステレーションのうちの複数の衛星を見ることができ、これら衛星の各々は、前記第1周波数の少なくとも1つの第1ナビゲーション信号および前記第2周波数の無線ナビゲーション信号を送信し、この方法では、衛星と基準受信機との利用できる各組み合わせに対し、前記それぞれの基準受信機の助けにより、前記それぞれの衛星から発信された前記第1および第2信号の各々に対して行われたコードおよび位相測定から計算されたワイドレーンの不確定性の未処理値に基づき、衛星内部遅延および前記ワイドレーンの不確定性の整数値を前記基準ネットワークのレベルでコヒーレントな態様で決定する、請求項1に記載の方法。
【請求項3】
前記決定された衛星内部遅延を放送するステップを備える、請求項1または2に記載の方法。
【請求項4】
無線ナビゲーション衛星のコンステレーションのうちの1つの衛星から発信される無線ナビゲーション信号を処理するための方法であって、前記衛星は、第1の周波数の少なくとも1つの第1無線ナビゲーション信号および第1の周波数と異なる第2の周波数の第2無線ナビゲーション信号を放送し、前記方法は、前記衛星を見ることができる1つのまたは複数の基準衛星を含む基準ネットワークのレベルにおいて、
前記単数または複数の基準受信機のレベルにおいて、前記第1および第2無線ナビゲーション信号を受信するステップと、
前記単数または複数の基準受信機により、前記受信した第1および第2信号の各々に対し、非微分コード測定および非微分位相測定を実行するステップと、
前記非微分コード測定値、前記非微分位相測定値、前記ワイドレーンの不確定性の1つまたは複数の整数値、および前記衛星と前記単数または複数の基準受信機との間の伝搬距離のモデルから、前記衛星の衛星クロック値を決定するステップとを備える、無線ナビゲーション信号を処理するための方法。
【請求項5】
前記クロック値を決定する前記ステップは、
前記衛星に関する衛星内部遅延を得るステップと、
前記未処理値および前記衛星内部遅延に基づくワイドレーンの不確定性の整数値を決定するステップとを含む、請求項4に記載の方法。
【請求項6】
前記クロック値を決定する前記ステップは、コード測定値、位相測定値およびワイドレーンの不確定性の1つまたは複数の整数値の助けにより、前記伝搬距離に対するモデルパラメータを推定し、その後、前記推定されたパラメータから前記クロック値を推定することを含む、請求項4または5に記載の方法。
【請求項7】
前記伝搬距離に対する前記モデルパラメータの前記推定は、前記衛星に対する精密軌道の決定を含む、請求項6に記載の方法。
【請求項8】
前記決定された衛星のクロック値を放送するステップを含む、請求項4〜7のいずれか1項に記載の方法。
【請求項9】
前記決定された精密軌道を放送するステップを含む、請求項7に記載の方法。
【請求項10】
無線ナビゲーション衛星のコンステレーションのうちの1つの衛星から発信される無線ナビゲーション信号を処理するための方法であって、前記衛星は、第1の周波数の少なくとも1つの第1無線ナビゲーション信号および第1の周波数と異なる第2の周波数の第2無線ナビゲーション信号を放送する方法であって、前記方法は、前記衛星を見ることができる受信機のレベルにおいて、
前記第1および第2無線ナビゲーション信号を受信するステップと、
前記受信した第1および第2信号の各々に対し、非微分コード測定および非微分位相測定を実行するステップと、
前記非微分コード測定値および前記非微分位相測定値から前記ワイドレーンな位相の不確定性の未処理値を計算するステップと、
前記衛星に関する衛星内部遅延を得るステップと、
前記未処理値および前記衛星内部遅延に基づき、前記ワイドレーンの不確定性の整数値を決定するステップとを備える、無線ナビゲーション信号を処理するための方法。
【請求項11】
前記衛星内部遅延をデータベースから得る、請求項10に記載の方法。
【請求項12】
SBAS衛星によって放送されたか、または無線電話ネットワークによって送信されたか、または地上放送により放送されたメッセージから、前記内部遅延を抽出する、請求項10に記載の方法。
【請求項13】
前記衛星に関する軌道値および衛星クロック値を得るステップと、
前記非微分コード測定値、前記非微分位相測定値、ワイドレーンの不確定性の前記整数値、前記軌道値、前記衛星クロック値および前記衛星と前記受信機との間の伝搬距離のモデルからフィルタリングにより、ナローレーンの不確定性の整数値を推定するステップを含む、請求項10〜12のいずれか1項に記載の方法。
【請求項14】
データベースから前記軌道値および前記クロック値を得る、請求項13に記載の方法。
【請求項15】
SBAS衛星によって放送されたか、または無線電話ネットワークによって送信されたか、または地上放送により放送されたメッセージから、前記軌道値および前記クロック値を抽出する、請求項13記載の方法。
【請求項1】
無線ナビゲーション衛星のコンステレーションのうちの1つの衛星から発信される無線ナビゲーション信号を処理するための方法であって、前記衛星は、第1の周波数の少なくとも1つの第1無線ナビゲーション信号および第1の周波数と異なる第2の周波数の第2無線ナビゲーション信号を放送し、前記衛星を見ることができる少なくとも1つの基準衛星を含む基準ネットワークのレベルにおいて、前記基準受信機に対する衛星内部遅延およびワイドレーンの不確定性の整数値を決定する方法において、この内部衛星遅延およびワイドレーンの不確定性の整数値のこの決定は、
前記基準受信機のレベルにおいて、前記第1および第2無線ナビゲーション信号を受信するステップと、
前記基準受信機により、前記第1および第2の受信された信号の各々に対し、非微分コード測定および非微分位相測定を実行するステップと、
非微分コード測定値および非微分位相測定値から前記ワイドレーンの位相不確定性の未処理値を計算するステップと、
前記基準受信機に対する前記未処理値に基づき、ワイドレーンの位相不確定性の整数値と共に衛星内部遅延を固定するステップとを備える、無線ナビゲーション信号を処理するための方法。
【請求項2】
前記基準ネットワークは、複数の基準受信機を含み、これら基準受信機からその都度前記コンステレーションのうちの複数の衛星を見ることができ、これら衛星の各々は、前記第1周波数の少なくとも1つの第1ナビゲーション信号および前記第2周波数の無線ナビゲーション信号を送信し、この方法では、衛星と基準受信機との利用できる各組み合わせに対し、前記それぞれの基準受信機の助けにより、前記それぞれの衛星から発信された前記第1および第2信号の各々に対して行われたコードおよび位相測定から計算されたワイドレーンの不確定性の未処理値に基づき、衛星内部遅延および前記ワイドレーンの不確定性の整数値を前記基準ネットワークのレベルでコヒーレントな態様で決定する、請求項1に記載の方法。
【請求項3】
前記決定された衛星内部遅延を放送するステップを備える、請求項1または2に記載の方法。
【請求項4】
無線ナビゲーション衛星のコンステレーションのうちの1つの衛星から発信される無線ナビゲーション信号を処理するための方法であって、前記衛星は、第1の周波数の少なくとも1つの第1無線ナビゲーション信号および第1の周波数と異なる第2の周波数の第2無線ナビゲーション信号を放送し、前記方法は、前記衛星を見ることができる1つのまたは複数の基準衛星を含む基準ネットワークのレベルにおいて、
前記単数または複数の基準受信機のレベルにおいて、前記第1および第2無線ナビゲーション信号を受信するステップと、
前記単数または複数の基準受信機により、前記受信した第1および第2信号の各々に対し、非微分コード測定および非微分位相測定を実行するステップと、
前記非微分コード測定値、前記非微分位相測定値、前記ワイドレーンの不確定性の1つまたは複数の整数値、および前記衛星と前記単数または複数の基準受信機との間の伝搬距離のモデルから、前記衛星の衛星クロック値を決定するステップとを備える、無線ナビゲーション信号を処理するための方法。
【請求項5】
前記クロック値を決定する前記ステップは、
前記衛星に関する衛星内部遅延を得るステップと、
前記未処理値および前記衛星内部遅延に基づくワイドレーンの不確定性の整数値を決定するステップとを含む、請求項4に記載の方法。
【請求項6】
前記クロック値を決定する前記ステップは、コード測定値、位相測定値およびワイドレーンの不確定性の1つまたは複数の整数値の助けにより、前記伝搬距離に対するモデルパラメータを推定し、その後、前記推定されたパラメータから前記クロック値を推定することを含む、請求項4または5に記載の方法。
【請求項7】
前記伝搬距離に対する前記モデルパラメータの前記推定は、前記衛星に対する精密軌道の決定を含む、請求項6に記載の方法。
【請求項8】
前記決定された衛星のクロック値を放送するステップを含む、請求項4〜7のいずれか1項に記載の方法。
【請求項9】
前記決定された精密軌道を放送するステップを含む、請求項7に記載の方法。
【請求項10】
無線ナビゲーション衛星のコンステレーションのうちの1つの衛星から発信される無線ナビゲーション信号を処理するための方法であって、前記衛星は、第1の周波数の少なくとも1つの第1無線ナビゲーション信号および第1の周波数と異なる第2の周波数の第2無線ナビゲーション信号を放送する方法であって、前記方法は、前記衛星を見ることができる受信機のレベルにおいて、
前記第1および第2無線ナビゲーション信号を受信するステップと、
前記受信した第1および第2信号の各々に対し、非微分コード測定および非微分位相測定を実行するステップと、
前記非微分コード測定値および前記非微分位相測定値から前記ワイドレーンな位相の不確定性の未処理値を計算するステップと、
前記衛星に関する衛星内部遅延を得るステップと、
前記未処理値および前記衛星内部遅延に基づき、前記ワイドレーンの不確定性の整数値を決定するステップとを備える、無線ナビゲーション信号を処理するための方法。
【請求項11】
前記衛星内部遅延をデータベースから得る、請求項10に記載の方法。
【請求項12】
SBAS衛星によって放送されたか、または無線電話ネットワークによって送信されたか、または地上放送により放送されたメッセージから、前記内部遅延を抽出する、請求項10に記載の方法。
【請求項13】
前記衛星に関する軌道値および衛星クロック値を得るステップと、
前記非微分コード測定値、前記非微分位相測定値、ワイドレーンの不確定性の前記整数値、前記軌道値、前記衛星クロック値および前記衛星と前記受信機との間の伝搬距離のモデルからフィルタリングにより、ナローレーンの不確定性の整数値を推定するステップを含む、請求項10〜12のいずれか1項に記載の方法。
【請求項14】
データベースから前記軌道値および前記クロック値を得る、請求項13に記載の方法。
【請求項15】
SBAS衛星によって放送されたか、または無線電話ネットワークによって送信されたか、または地上放送により放送されたメッセージから、前記軌道値および前記クロック値を抽出する、請求項13記載の方法。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2010−522874(P2010−522874A)
【公表日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願番号】特願2010−500294(P2010−500294)
【出願日】平成20年3月28日(2008.3.28)
【国際出願番号】PCT/EP2008/053745
【国際公開番号】WO2008/125458
【国際公開日】平成20年10月23日(2008.10.23)
【出願人】(507233361)セントル・ナショナル・デチュード・スパシアル (7)
【Fターム(参考)】
【公表日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願日】平成20年3月28日(2008.3.28)
【国際出願番号】PCT/EP2008/053745
【国際公開番号】WO2008/125458
【国際公開日】平成20年10月23日(2008.10.23)
【出願人】(507233361)セントル・ナショナル・デチュード・スパシアル (7)
【Fターム(参考)】
[ Back to top ]