
玩具装置
【課題】他の形態変化玩具と組み合わせて遊ぶことができ、新規な印象を与える玩具装置を提供する。
【解決手段】複数の回動部材20を回動させることで可逆的に形態が変化する形態変化玩具10と、前記形態変化玩具10を設置可能な基台50と、を有し、前記形態変化玩具10は、前記複数の回動部材20を回動させるための回動機構と、前記回動機構を作動させるための操作子14と、を備え、前記基台50は、前記操作子14が連結される作動部64と、前記作動部64を外部から操作させるための操作部68と、を備え、前記操作部68が操作されると、前記操作子14が前記作動部64を介して応動し、前記回動機構が作動するようにした。
【解決手段】複数の回動部材20を回動させることで可逆的に形態が変化する形態変化玩具10と、前記形態変化玩具10を設置可能な基台50と、を有し、前記形態変化玩具10は、前記複数の回動部材20を回動させるための回動機構と、前記回動機構を作動させるための操作子14と、を備え、前記基台50は、前記操作子14が連結される作動部64と、前記作動部64を外部から操作させるための操作部68と、を備え、前記操作部68が操作されると、前記操作子14が前記作動部64を介して応動し、前記回動機構が作動するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、可逆的に形態が変化する形態変化玩具と、この形態変化玩具を設置可能な基台とを有する玩具装置に関し、特に、基台に設けられた操作部を操作することによって形態変化玩具の形態を変化させる玩具装置に関するものである。
【背景技術】
【0002】
従来、乗物や動物等の一つの形態からロボット等の他の形態に可逆的に形態が変化する形態変化玩具が知られている。こうした形態変化玩具は、基本的に構成部品を順次手動で操作して形態を変化させて遊ぶものであったため、操作の手順が煩雑であった。そこで、簡単な操作で玩具の形態を変化させることができる形態変化玩具も提案されている。
【0003】
例えば、特許文献1には、操作体を操作してスライド部材を前方にスライドさせると形態が変化する形態変化玩具が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−10442号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記した特許文献1記載の形態変化玩具は、単に操作体を操作して形態を変化させるものであり、他の形態変化玩具と組み合わせて遊ぶものではなかった。
【0006】
そこで、本発明は、他の形態変化玩具と組み合わせて遊ぶことができ、新規な印象を与える玩具装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明は、上記した課題を解決するためになされたものであり、以下を特徴とする。
【0008】
(請求項1)
請求項1に記載の発明は、以下の点を特徴とする。
【0009】
すなわち、請求項1に記載の玩具装置は、複数の回動部材を回動させることで可逆的に形態が変化する形態変化玩具と、前記形態変化玩具を設置可能な基台と、を有し、前記形態変化玩具は、前記複数の回動部材を回動させるための回動機構と、前記回動機構を作動させるための操作子と、を備え、前記基台は、前記操作子が連結される作動部と、前記作動部を外部から操作させるための操作部と、を備え、前記操作部が操作されると、前記操作子が前記作動部を介して応動し、前記回動機構が作動することを特徴とする。
【0010】
(請求項2)
請求項2に記載の発明は、上記した請求項1記載の発明の特徴点に加え、以下の点を特徴とする。
【0011】
すなわち、前記形態変化玩具は、第1の形態から第2の形態へと形態が変化するものであって、前記操作子は、前記第1の形態及び前記第2の形態のいずれにおいても底面となる面に設けられていることを特徴とする。
【0012】
(請求項3)
請求項3に記載の発明は、上記した請求項1又は2記載の発明の特徴点に加え、以下の点を特徴とする。
【0013】
すなわち、前記基台は、ベース体と、前記ベース体に対して相対的に摺動可能な玩具取付部と、を備えるとともに、前記作動部は前記玩具取付部に形成されており、前記操作部が操作されたときに、前記作動部が作動するとともに、前記玩具取付部が摺動することを特徴とする。
【0014】
(請求項4)
請求項4に記載の発明は、上記した請求項3記載の発明の特徴点に加え、以下の点を特徴とする。
【0015】
すなわち、前記基台は、外部から操作可能な補助操作部を更に備え、前記補助操作部と前記操作部との相対的位置が変化したときに前記作動部が作動することを特徴とする。
【0016】
(請求項5)
請求項5に記載の発明は、上記した請求項3又は4に記載の発明の特徴点に加え、以下の点を特徴とする。
【0017】
すなわち、前記基台の先端部には、他の基台と連結するための連結部が設けられ、前記玩具取付部は、前記基台の先端部方向に向かって摺動可能であることを特徴とする。
【発明の効果】
【0018】
請求項1に記載の発明は上記の通りであり、形態変化玩具を設置可能な基台を備え、基台の操作部が操作されると形態変化玩具の操作子が応動し、回動機構が作動して形態変化玩具の形態が変化するように形成されている。すなわち、形態変化専用の基台を操作することで形態を変化させることができるので、形態変化の態様にかかわらず、違う形態変化玩具を基台に装着した場合でも同じ操作で形態変化を実行することができる。
【0019】
また、請求項2に記載の発明は上記の通りであり、前記形態変化玩具は、第1の形態から第2の形態へと形態が変化するものであって、前記操作子は、前記第1の形態及び前記第2の形態のいずれにおいても底面となる面に設けられている。このため、形態変化玩具を基台に設置する場合には、底面を有する部材が基台に固定されることとなり、この固定された部材をベースとして複数の回動部材が回動して形態が変化する。このため、例えば基部の上に立ち上がるように形態変化させることができ、新規な印象を与える玩具装置を提供できる。
【0020】
また、請求項3に記載の発明は上記の通りであり、操作部が操作されたときに、作動部が作動するとともに、作動部が形成された玩具取付部が摺動するように形成されている。このため、形態変化玩具は、基台上で形態変化しつつ、摺動するように形成されており、新規な印象を与える玩具装置を提供できる。
【0021】
また、請求項4に記載の発明は上記の通りであり、基台は、外部から操作可能な補助操作部を更に備え、補助操作部と操作部との相対的位置が変化したときに作動部が作動するように形成されている。このため、補助操作部と操作部とを同時に操作した場合には、作動部を作動させずに玩具取付部を摺動させることができる。また、操作部を操作した状態で補助操作部を操作した場合には、玩具取付部を摺動後の状態に留まらせた状態で玩具取付部を作動させることができる。このように、形態変化と摺動動作とのバリエーションを持たせることができ、新規な印象を与える玩具装置を提供できる。
【0022】
また、請求項5に記載の発明は上記の通りであり、基台の先端部には、他の基台と連結するための連結部が設けられ、前記玩具取付部は、基台の先端部方向に向かって摺動可能に形成されている。このため、複数の基台を連結することにより、他の形態変化玩具と相対させて遊ぶことができる。
【0023】
この場合において、形態変化玩具が上記したような形態変化や摺動動作を行うようにして、これらの動作により他の形態変化玩具と対戦させるように形成することもできる。例えば、形態変化や摺動動作で形態変化玩具を互いにぶつけ合い、その衝撃で相手の形態変化玩具を基台から外すなどして転倒させることで勝敗を決することとしてもよい。このようにすれば、単に形態変化を楽しむだけでなく、対戦ゲームとして楽しむことができる玩具装置を提供できる。
【図面の簡単な説明】
【0024】
【図1】第1の形態変化玩具の外観図である。
【図2】第1の形態変化玩具の底面図である。
【図3】第1の形態変化玩具の形態変化の過程を示す説明図である。
【図4】第1の形態変化玩具の回動機構を示す説明図である。
【図5】第1の形態変化玩具の腕部材が移動する様子を示す説明図である。
【図6】第1の形態変化玩具の形態変化後の外観図である。
【図7】第2の形態変化玩具の外観図である。
【図8】第2の形態変化玩具の底面図である。
【図9】第2の形態変化玩具の形態変化の過程を示す説明図である。
【図10】第2の形態変化玩具の回動機構を示す説明図である。
【図11】第2の形態変化玩具の形態変化後の外観図である。
【図12】基台の外観図である。
【図13】基台の分解斜視図である。
【図14】基台が作動する様子を示す説明図である。
【図15】基台に第1の形態変化玩具を取り付けた状態を示す図である。
【図16】基台で第1の形態変化玩具を形態変化させた状態を示す図である。
【図17】第1の形態変化玩具を補助操作部で作動させた状態を示す図である。
【図18】基台に第2の形態変化玩具を取り付けた状態を示す図である。
【図19】基台で第2の形態変化玩具を形態変化させた状態を示す図である。
【図20】第2の形態変化玩具を補助操作部で作動させた状態を示す図である。
【図21】基台を連結した状態を示す図である。
【図22】基台を連結した状態を示す図(連結部を揺動させた状態)である。
【図23】基台を連結した状態を示す図(第1の形態変化玩具を形態変化させた状態)である。
【図24】基台を連結した状態を示す図(第2の形態変化玩具を形態変化させた状態)である。
【図25】基台を連結した状態を示す図(対向させた形態変化玩具を形態変化させた状態)である。
【発明を実施するための形態】
【0025】
以下、本発明の実施形態について、図を参照しながら説明する。
【0026】
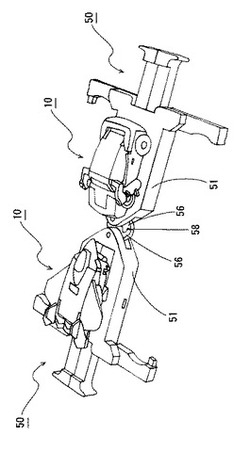
本実施形態は、第1の形態変化玩具10と、第2の形態変化玩具10と、の2つの形態変化玩具10を備え、これら形態変化玩具10を単独で形態変化させて遊ぶことができるのみならず、2つの形態変化玩具10を組み合わせて遊ぶこともできるものである。
【0027】
(第1の形態変化玩具10)
まず、第1の形態変化玩具10について説明する。
【0028】
第1の形態変化玩具10は、図1〜6に示すように、複数の回動部材20を回動させることで第1の形態から第2の形態へと可逆的に形態が変化するものである。この第1の形態変化玩具10は、前記第1の形態として輸送機器(具体的には、自動車)の形態をとり(図1参照)、前記第2の形態としてロボットの形態をとる(図6参照)ように形成されている。
【0029】
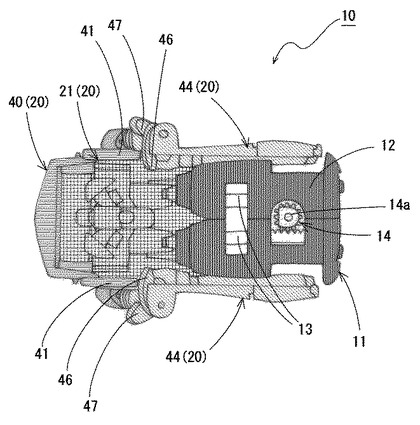
この第1の形態変化玩具10は、図1及び図2に示すように、後輪側で接地する底面12を有するベース部材11と、このベース部材11に回動可能に連結された複数の回動部材20と、を備えている。
【0030】
前記ベース部材11の内部には、水平ギア14(操作子)が設けられており、この水平ギア14を回転させることにより、前記複数の回動部材20が回動して形態が変化するように形成されている。この水平ギア14の下端部は、図1及び図2に示すように、底面12からベース部材11の外部へと突出しており、これにより、外部から操作可能な突出部14aを形成している。すなわち、この突出部14aを操作することで水平ギア14が回転し、この水平ギア14の回転によって、後述する回動機構を作動させ、複数の回動部材20を回動させるようになっている。
【0031】
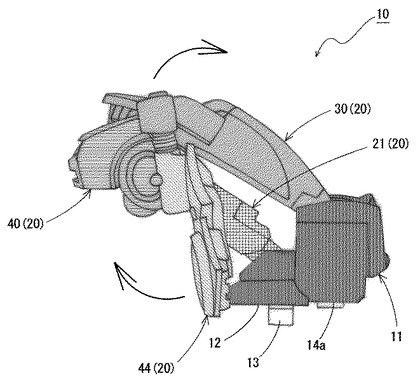
ここで、第1の形態変化玩具10は、図1及び図2に示すように、以下の回動部材20を備えている。すなわち、ベース部材11に連結されて自動車形態の上部を覆うように設けられる後部材30と、この後部材30と連結されて自動車形態の両側を覆う2つの腕部材44と、ベース部材11に連結されて自動車形態の内部に収容される前部材21と、後部材30と前部材21とを連結して自動車形態のフロント部分を形成するリンク部材40と、を備えている。
【0032】
これらの回動部材20は、水平ギア14の回転によって回動するものであり、おおよそ以下のように第1の形態から第2の形態へと変化する。すなわち、図3に示すように、水平ギア14の回転力を駆動力として後部材30が立ち上げられるとともに、この後部材30と連動して前部材21が立ち上げられる。また、リンク部材40が接触することによって2つの腕部材44が軸回転し、この2つの腕部材44が前方に突き出される。
【0033】
以下、この形態変化について詳しく説明する。
【0034】
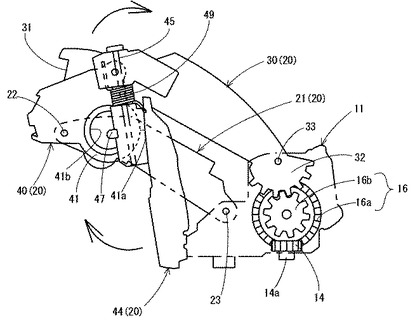
図4は、第1の形態変化玩具10に係る回動機構を示す説明図であり、この図4が示すように、ベース部材11の内部には冠歯車部16aと平歯車部16bとが一体形成された一体形成ギア16が設けられている。そして、この一体形成ギア16の冠歯車部16aが、前述した水平ギア14と噛み合うように配置されている。このため、水平ギア14の突出部14aを回転させると、水平ギア14と噛み合った一体形成ギア16が回転する。
【0035】
更に、後部材30の基部(自動車形態における後端部)には、前述した一体形成ギア16の平歯車部16bと噛み合う基部ギア32が形成されているため、一体形成ギア16が回転すると、基部ギア32の中心に設けられた軸部33を中心として、後部材30が立ち上がる方向へと回動する。
【0036】
ここで、前部材21は、一端側が下軸支部23を介してベース部材11に回動可能に連結され、他端側が上軸支部22を介してリンク部材40に回動可能に連結されている。しかも、このリンク部材40は、前部材21と後部材30とを連結しているため、これらベース部材11、前部材21、後部材30、リンク部材40、の4つの部材によって、4節を連結したリンク機構が形成されている。このリンク機構においては、ベース部材11が固定節であり、後部材30が原動節となっているため、上述したように後部材30が立ち上がる方向へと回動すると、これに従属して前部材21も作動し、下軸支部23を回転中心として立ち上がる方向へと回動する。
【0037】
そして、前部材21及び後部材30がほぼ垂直にまで立ち上がると、前部材21の内側面と後部材30の内側面とが当接して、それ以上回動しないようになっている。このため、前部材21と後部材30とがちょうどベース部材11上に立ち上がる位置で回動がストップし、第2の形態への形態変化が完了する。
【0038】
なお、図4に示すように、このリンク機構が作動する過程でリンク部材40の内部に収容されていた後部材30の先端が外部に露出するが、この後部材30の先端部は形態変化後のロボット形態において頭部31となるものである。
【0039】
ところで、上記のように前部材21及び後部材30が立ち上げられて形態が変化しているとき、両側の腕部材44は、リンク機構の作動によって移動したリンク部材40と接触することにより、前方に突き出されるように回動する。
【0040】
すなわち、腕部材44は、図4に示すように、回転軸45を軸として後部材30に回動可能に取り付けられており、通常時においては、リングバネ49によって自動車の形態に適した位置へと付勢されている。しかしながら、図5に示すように、水平ギア14が回転することによりリンク部材40が移動すると、腕部材44はこのリンク部材40に押動されて、リングバネ49の付勢力に反して回転する。
【0041】
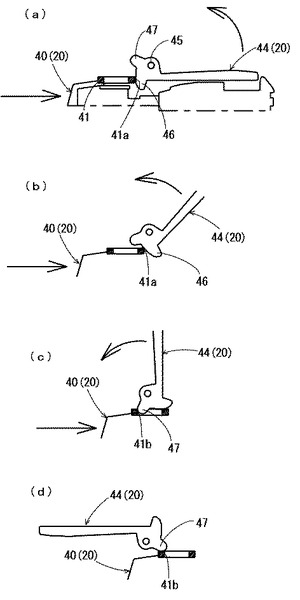
ここで、図5は、上記したリンク機構が作動してリンク部材40と腕部材44とが接触する様子を示す図であり、この接触部を底面側から見た図である(図2参照)。この図5(a)に示すように、リンク機構が作動すると、リンク部材40の前輪部41は腕部材44の方向へと移動する。すると、図5(b)に示すように、前輪部41の外周縁41aが腕部材44の第1接触部46と当接し、リングバネ49の付勢力に反して腕部材44を約90度回転させる。
【0042】
このとき、腕部材44の第2接触部47が前輪部41の内側に入り込むため、更に前輪部41が腕部材44の方向へと移動すると、図5(c)に示すように、前輪部41の内周縁41bが腕部材44の第2接触部47と当接し、更に腕部材44を約90度回転させる。このようにして、図5(d)に示すように、腕部材44は回転軸45を中心に約180度回転して停止する。
【0043】
ここで、腕部材44は、図6に示すように、回転軸45に対して約45度の方向に延びているため、上記したように平面視において約180度回転したときに、側面視においては約90度回転することになる。このため、形態変化完了時においては、腕部材44は、図6に示すような前方に突き出した状態となる。
【0044】
上記したように、水平ギア14の突出部14aを回転させると、後部材30が回動するとともにリンク機構が作動し、更に腕部材44が回転させられて、図6に示すように、形態変化玩具10が第2の形態であるロボットの形態に変化する。
【0045】
すなわち、この第2の形態においては、図6に示すように、ベース部材11が膝下脚部を形成し、後部材30が背中及び頭部31を形成し、腕部材44が腕を形成し、前部材21が前面の胴体部を形成し、リンク部材40が胸部を形成することにより、両手を前に突き出して起立した姿勢のロボットの形態が構成される。
【0046】
なお、上記では自動車の形態からロボットの形態へと変化する態様について説明したが、水平ギア14の突出部14aを逆回転させれば、ロボットの形態から自動車の形態へと変化することは言うまでもない。すなわち、水平ギア14の突出部14aを逆回転させると、前記したリンク機構が逆に作動し、前部材21、後部材30、及びリンク部材40が、第1の形態を構成する位置へと回動する。そして、リンク部材40が回動したことにより、腕部材44と前輪部41との係合が外れるため、リングバネ49の不勢力に従い、腕部材44が第1の形態を構成する位置へと回動し、第1の形態への形態変化が完了する。
【0047】
以上のように、本実施形態に係る形態変化玩具10は、外部から操作可能に形成された水平ギア14を回転させることにより、回動機構が作動して形態が変化する。このため、外表面に形成されるのは水平ギア14のみであり、玩具のデザインや機能を制限することなく、簡単な操作で形態を変化させることができる。
【0048】
また、水平ギア14は回転式であるため、スライド式や押下式などとは異なり、操作範囲が制限されない。すなわち、幅などの制限がなく回転数に応じて回動機構に駆動力を与えることができるため、回動機構の構成が制限されず、形態変化にバリエーションを持たせることができる。
【0049】
水平ギア14は、前記第1の形態及び前記第2の形態のいずれにおいても底面12に形成されているため、玩具のデザインや機能に与える影響を最小限とすることができる。
【0050】
(第2の形態変化玩具10)
次に、第2の形態変化玩具10について説明する。
【0051】
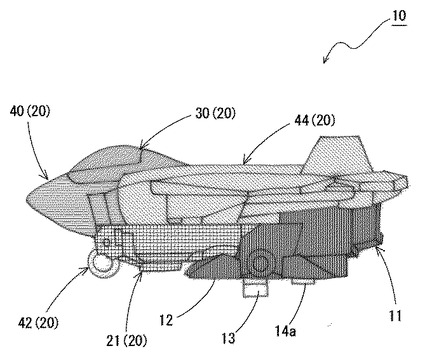
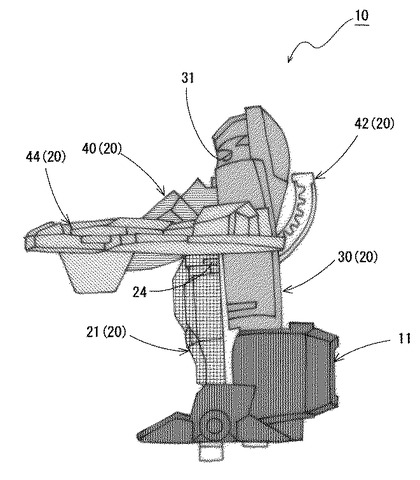
第2の形態変化玩具10は、図7〜11に示すように、複数の回動部材20を回動させることで第1の形態から第2の形態へと可逆的に形態が変化するものである。この第2の形態変化玩具10は、前記第1の形態として輸送機器(具体的には、飛行機)の形態をとり(図7参照)、前記第2の形態としてロボットの形態をとる(図11参照)ように形成されている。
【0052】
この第2の形態変化玩具10は、図1及び図2に示すように、後部側で接地する底面12を有するベース部材11と、このベース部材11に回動可能に連結された複数の回動部材20と、を備えている。
【0053】
前記ベース部材11の内部には、第1の形態変化玩具10と同様に、水平ギア14(操作子)が設けられており、この水平ギア14を回転させることにより、前記複数の回動部材20が回動して形態が変化するように形成されている。また、第1の形態変化玩具10と同様に、この水平ギア14の下端部は、図7及び図8に示すように、底面12からベース部材11の外部へと突出しており、これにより、外部から操作可能な突出部14aを形成している。すなわち、この突出部14aを操作することで水平ギア14が回転し、この水平ギア14の回転によって、後述する回動機構を作動させ、複数の回動部材20を回動させるようになっている。
【0054】
ここで、第2の形態変化玩具10は、図7及び図8に示すように、以下の回動部材20を備えている。すなわち、ベース部材11に連結されて飛行機形態の上部を覆うように設けられる後部材30と、この後部材30と連結されて飛行機形態の両翼を形成する2つの腕部材44と、ベース部材11に連結されて飛行機形態の下部に設けられる前部材21と、後部材30と前部材21とを連結して飛行機形態のノーズ部分を形成するリンク部材40と、を備えている。
【0055】
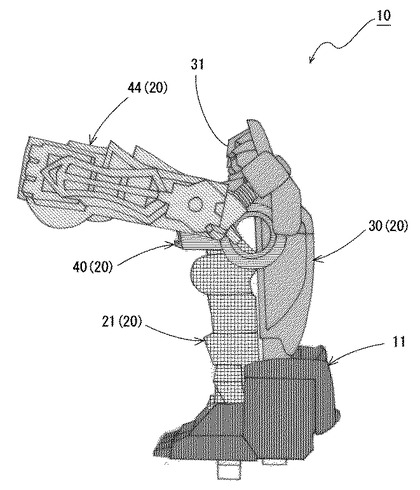
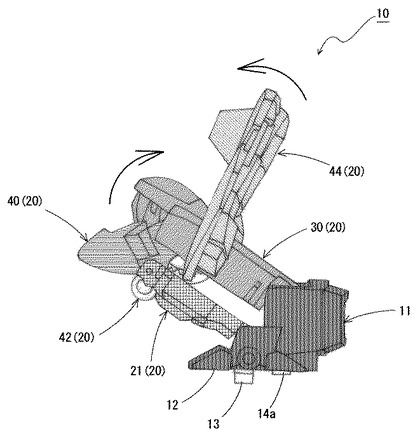
これらの回動部材20は、水平ギア14の回転によって回動するものであり、おおよそ以下のように第1の形態から第2の形態へと変化する。すなわち、図9に示すように、水平ギア14の回転力を駆動力として後部材30が立ち上げられるとともに、この後部材30と連動して前部材21が立ち上げられる。また、第2の形態変化玩具10の内部に設けられた回動機構によって、2つの腕部材44が前方に突き出されるように回動する。
【0056】
以下、この形態変化について詳しく説明する。
【0057】
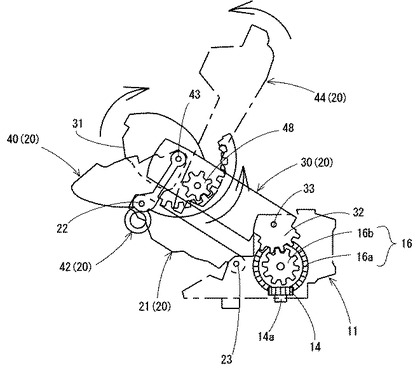
図10は、第2の形態変化玩具10に係る回動機構を示す説明図であり、この図10が示すように、ベース部材11の内部には冠歯車部16aと平歯車部16bとが一体形成された一体形成ギア16が設けられている。そして、この一体形成ギア16の冠歯車部16aが、前述した水平ギア14と噛み合うように配置されている。このため、水平ギア14の突出部14aを回転させると、水平ギア14と噛み合った一体形成ギア16が回転する。
【0058】
更に、後部材30の基部(飛行機形態における後端部)には、前述した一体形成ギア16の平歯車部16bと噛み合う基部ギア32が形成されているため、一体形成ギア16が回転すると、基部ギア32の中心に設けられた軸部33を中心として、後部材30が立ち上がる方向へと回動する。
【0059】
ここで、前部材21は、一端側が下軸支部23を介してベース部材11に回動可能に連結され、他端側が上軸支部22を介してリンク部材40に回動可能に連結されている。しかも、このリンク部材40は、前部材21と後部材30とを連結しているため、これらベース部材11、前部材21、後部材30、リンク部材40、の4つの部材によって、4節を連結したリンク機構が形成されている。このリンク機構においては、ベース部材11が固定節であり、後部材30が原動節となっているため、上述したように後部材30が立ち上がる方向へと回動すると、これに従属して前部材21も作動し、下軸支部23を回転中心として立ち上がる方向へと回動する。
【0060】
そして、前部材21及び後部材30がほぼ垂直にまで立ち上がると、前部材21の内側面と後部材30の内側面とが当接して、それ以上回動しないようになっている。このため、前部材21と後部材30とがちょうどベース部材11上に立ち上がる位置で回動がストップし、第2の形態への形態変化が完了する。
【0061】
なお、図10に示すように、このリンク機構が作動する過程でリンク部材40の内部に収容されていた後部材30の先端が外部に露出するが、この後部材30の先端部は形態変化後のロボット形態において頭部31となるものである。
【0062】
ところで、上記のように前部材21及び後部材30が立ち上げられて形態が変化しているとき、両側の腕部材44は、形態変化玩具10の内部に配置された回動機構によって、前方に突き出されるように回動する。
【0063】
すなわち、形態変化玩具10の内部には、図10に示すように、内歯を有する半円弧状のギアプレート42が設けられており、このギアプレート42は、上軸支部22及び回動軸43によって、前部材21と後部材30とに連結されている。このため、水平ギア14の突出部14aが回転して前部材21と後部材30との相対位置が変化すると、これに応動してギアプレート42も回動軸43を中心として回動する。なお、後部材30の背面側には図示しない貫通孔が形成されており、回動することにより形態変化玩具10の内部に収まりきらなくなったギアプレート42の一部は、この貫通孔から突出するようになっている。
【0064】
そして、このギアプレート42の内歯には、図10に示すように、腕部材44の基端部付近に設けられた腕部ギア48が噛み合っているため、ギアプレート42が移動すると腕部ギア48が回転し、腕部材44が回動する。すなわち、図10に示すように、前部材21及び後部材30が立ち上がる方向に回動した場合、ギアプレート42は背面側に突出するように移動するため、腕部材44は上方及び前方へと回動する。そして、図11に示すように、最終的には腕部材44は約270度回転し、形態変化完了時においては前方へ突き出されるようになっている。なお、約270度回転した腕部材44は係止部24に下方を支持されるため、それ以上回動しない。
【0065】
上記したように、水平ギア14の突出部14aを回転させると、後部材30が回動するとともにリンク機構が作動し、更に腕部材44が回転させられて、図11に示すように、形態変化玩具10が第2の形態であるロボットの形態に変化する。
【0066】
すなわち、この第2の形態においては、図11に示すように、ベース部材11が脚部を形成し、後部材30が背中及び頭部31を形成し、腕部材44が腕を形成し、前部材21が前面の胴体部を形成し、リンク部材40が胸部を形成することにより、両手を前に突き出して起立した姿勢のロボットの形態が構成される。
【0067】
なお、上記では飛行機の形態からロボットの形態へと変化する態様について説明したが、水平ギア14の突出部14aを逆回転させれば、ロボットの形態から飛行機の形態へと変化することは言うまでもない。すなわち、水平ギア14の突出部14aを逆回転させると、前記したリンク機構が逆に作動し、前部材21、後部材30、及びリンク部材40が、第1の形態を構成する位置へと回動する。そして、ギアプレート42は形態変化玩具10の内部へと収容される方向に移動するため、腕部材44が第1の形態を構成する方向へと回動し、第1の形態への形態変化が完了する。
【0068】
以上のように、本実施形態に係る形態変化玩具10は、外部から操作可能に形成された水平ギア14を回転させることにより、回動機構が作動して形態が変化する。このため、外表面に形成されるのは水平ギア14のみであり、玩具のデザインや機能を制限することなく、簡単な操作で形態を変化させることができる。
【0069】
また、水平ギア14は回転式であるため、スライド式や押下式などとは異なり、操作範囲が制限されない。すなわち、幅などの制限がなく回転数に応じて回動機構に駆動力を与えることができるため、回動機構の構成が制限されず、形態変化にバリエーションを持たせることができる。
【0070】
水平ギア14は、前記第1の形態及び前記第2の形態のいずれにおいても底面12に形成されているため、玩具のデザインや機能に与える影響を最小限とすることができる。
【0071】
(基台50を使用した形態変化)
上記したように、本実施形態に係る形態変化玩具10は、第1の形態及び第2の形態のいずれにおいても底面12に水平ギア14の突出部14aが形成されている。このため、この底面12を固定する基台50を設け、この基台50によって水平ギア14の突出部14aを操作することができる。すなわち、基台50を使用することにより、簡単な操作で形態変化玩具10の形態を変化させることができる。
【0072】
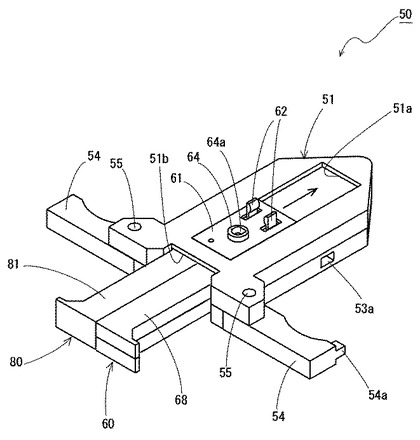
基台50は、図12に示すように、板状のベース体51と、前記ベース体51の内部に押し込み操作可能に形成された第1摺動体60及び第2摺動体80と、前記ベース体51の基部両側に設けられたハンドル54と、を備えている。
【0073】
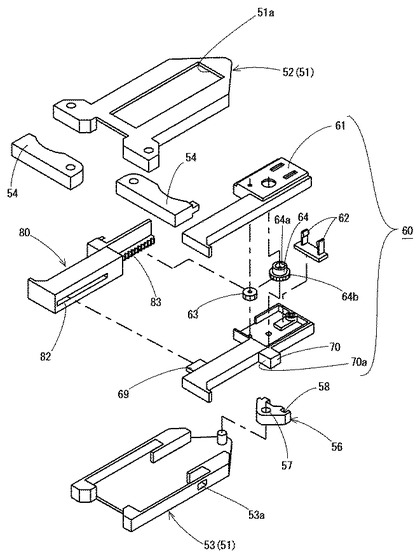
ベース体51は、図13に示すように、上カバー52と下カバー53とを上下に接合して構成され、上カバー52の上面中央には開口51aが設けられている。このベース体51の内部には第1摺動体60及び第2摺動体80が収容され、前述した開口51aからは、後述する玩具取付部61の上面が露出している。また、反先端側の側面には、図12に示すように、操作部突出口51bが設けられており、この操作部突出口51bからは、第1摺動体60の操作部68及び第2摺動体80の補助操作部81が突出している。
【0074】
第1摺動体60は、図12に示すように、操作部突出口51bから突出した操作部68と、この操作部68の先端部に設けられた玩具取付部61と、を備えている。玩具取付部61は形態変化玩具10を取り付けるためのものであり、操作部68を押し込み操作することによって、ベース体51に対して相対的に摺動可能に形成されている。
【0075】
前述したように、この玩具取付部61の上面はベース体51の開口51aから露出しており、図12が示すように、形態変化玩具10を取り付けるための差込固定部62と、軸方向に嵌合孔64aを有する回転筒64(作動部)と、が玩具取付部61の内部から突出するように設けられている。この差込固定部62及び回転筒64は、いずれも形態変化玩具10に連結される。すなわち、差込固定部62は、形態変化玩具10の差込爪13に係合され、回転筒64は、形態変化玩具10の水平ギア14に連結される。なお、回転筒64と水平ギア14との連結は、回転筒64の嵌合孔64aに水平ギア14の突出部14aを差し込むことで行われる。この嵌合孔64a及び突出部14aは、いずれも蹄状に形成されているため、連結後に回転筒64が回転されると、その回転力が水平ギア14に伝達可能となっている。
【0076】
この玩具取付部61を摺動させるための操作部68は、図12に示すように、ベース体51の操作部突出口51bから突出した棒状部であり、外部から操作可能に形成されている。すなわち、この操作部68をベース体51の内部へ押し込むと、前記した玩具取付部61が基台50の先端方向に向かって摺動する。このため、玩具取付部61に形態変化玩具10を取り付けた上で操作部68を押し込み操作すると、形態変化玩具10も一緒に基台50の先端方向へ移動するようになっている。
【0077】
一方、第2摺動体80は、第1摺動体60と並列的にベース体51の内部に収容されるものであり、第1摺動体60の操作部68と同様に、棒状の補助操作部81を有している。この補助操作部81も、図12に示すように、ベース体51の操作部突出口51bから突出しており、外部から操作可能である。
【0078】
第2摺動体80は、図13に示すように、ベース体51の内部において第1摺動体60と対向する面にラック83が形成されており、第1摺動体60の内部に配置されたピニオン63と噛み合うようになっている。これにより、操作部68と補助操作部81との相対的位置が変化したときに回転筒64が回転するように形成されている。
【0079】
すなわち、操作部68又は補助操作部81のいずれかが操作されたことにより、操作部68と補助操作部81との相対的位置が変化すると、第2摺動体80のラック83により第1摺動体60のピニオン63に回転力が与えられる。このピニオン63は、図13に示すように、玩具取付部61の内部において回転筒64の下部に一体形成されたギア部64bと噛合している。このため、ピニオン63が回転すると回転筒64が回転するようになっている。
【0080】
このため、玩具取付部61に形態変化玩具10を取り付けた状態で操作部68と補助操作部81との相対的位置が変化すると、回転筒64に連結された水平ギア14が回転して、形態変化玩具10の形態が変化する。
【0081】
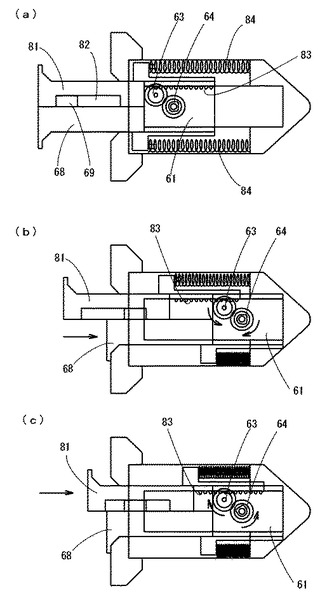
以下、玩具取付部61の摺動動作及び回転筒64の回転動作を図示した図14を参照しつつ、詳しく説明する。
【0082】
まず、図14(a)が示すように、通常時においては、操作部68及び補助操作部81は、いずれもバネ84によって後方へ付勢されており、言い換えると、ベース体51の操作部突出口51bから突出する方向へと付勢されている。
【0083】
この状態で操作部68のみを押し込み操作すると、図14(b)に示すように、玩具取付部61が先端方向へと摺動するとともに、ラック83上をピニオン63が回転し、これにより回転筒64が平面視で時計周りに回転する。このため、回転筒64に形態変化玩具10の水平ギア14が連結されている場合、形態変化玩具10の水平ギア14が第1の形態から第2の形態へと変化する方向へ回転するようになっている。
【0084】
また、図14(b)の状態から更に補助操作部81を押し込み操作すると、図14(c)に示すように、玩具取付部61の位置は先端方向に留まったままで、ラック83上をピニオン63が回転し、これにより回転筒64が平面視で反時計周りに回転する。すなわち、操作部68のみを押し込み操作した場合の回転方向とは逆の方向へと回転する。このため、回転筒64に形態変化玩具10の水平ギア14が連結されている場合、形態変化玩具10の水平ギア14が第2の形態から第1の形態へと変化する方向へ回転するようになっている。
【0085】
なお、図14(a)に示すように、操作部68の側面にはガイド突起69が形成されるとともに、補助操作部81の側面にはスリット82が形成されており、このスリット82に沿ってガイド突起69を有する操作部68が摺動するように形成されている。ここで、図14(a)の状態において、スリット82の端部がガイド突起69に当接しているため、この図14(a)の状態から補助操作部81を押し込み操作した場合、操作部68も一緒に押し込まれるように形成されている。このため、図14(a)の状態から補助操作部81を押し込み操作すると、玩具取付部61が先端方向へと摺動するが、操作部68と補助操作部81との相対的位置が変化しないため、回転筒64は回転せず、形態変化玩具10の形態は変化しない。このように、補助操作部81を押し込み操作することによって、形態変化玩具10の形態は変化させずに、玩具取付部61を摺動させることもできる。
【0086】
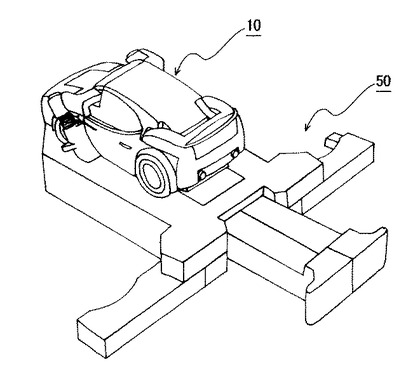
ここで、図15〜20は、実際に基台50に形態変化玩具10を取り付けた様子を示す図であり、図15〜17は第1の形態変化玩具10、図18〜20は第2の形態変化玩具10に係るものである。
【0087】
図15及び図18が示すように、操作部68及び補助操作部81が操作されていない場合には、形態変化玩具10は第1の形態をとっている。
【0088】
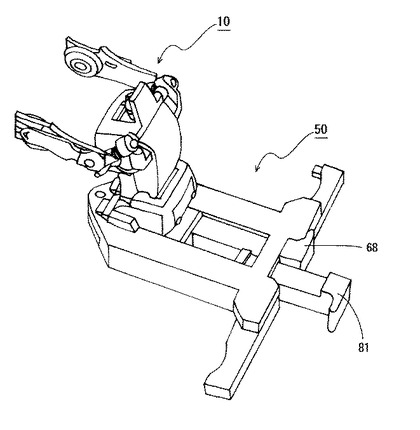
図16及び図19が示すように、操作部68を可能な限り奥まで押し込み操作した場合には、玩具取付部61(すなわち、形態変化玩具10)が先端方向に摺動するとともに、形態変化玩具10は第2の形態に変化する。
【0089】
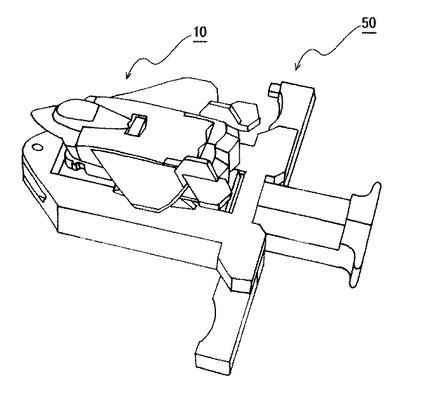
図17及び図20が示すように、操作部68を可能な限り奥まで押し込み操作した状態で、補助操作部81を押し込み操作すると、形態変化玩具10は第1の形態と第2の形態との間の形態変化途中の形態に変化する。この補助操作部81の操作を行うことで、形態変化玩具10が動いている状態を表現することができる。すなわち、補助操作部81を押し操作することで、図17及び図20が示すような前方に倒れ込んだ状態とするとともに、補助操作部81の操作を解除すれば、図16及び図19が示すような直立姿勢に戻る。このとき、腕部材44は前後に回動するため、ロボットが腕を前に打ちつける動作をさせることができる。
【0090】
なお、図12に示すように、ハンドル54の先端部にはロック突起54aが設けられており、このロック突起54aをベース体51のロック挿入口53aに差し込むことで、操作部68を操作した状態に保つことができる。すなわち、ハンドル54は、ハンドル回転軸55を中心に回動可能に形成されているため、操作部68を奥まで押し込み操作した状態でハンドル54を回動させ、ロック突起54aをロック挿入口53aに差し込むと、このロック突起54aが操作部68の側面に設けられたロック係合部70の反先端方向側面70aに係合し、操作部68がバネ84の付勢力によって押し戻されるのをロックするようになっている。このように操作部68をロックすれば、補助操作部81のみを押し操作すればよいため、玩具取付部61を先端方向に位置させたままで、上記したような形態変化玩具10の動きを表現させることができる。
【0091】
以上のように、本実施形態に係る形態変化玩具10は、基台50を操作することで形態変化玩具10の形態を変化可能に形成されているため、異なる形態変化玩具10を基台50に装着した場合でも同じ操作で形態変化を実行できる。
【0092】
また、形態変化玩具10は底面12が基台に設置されてベース部材11の上に立ち上がるように形態変化する。しかも、玩具取付部61を基台50上で摺動させたり、ベース体51を回動操作したりできるため、これらの操作を単独又は組み合わせておこなうことにより、従来にないバリエーションに富んだ操作が可能である。
【0093】
(対戦玩具としての遊び方)
上記したように、本実施形態によれば、形態変化専用の基台50を操作することで形態変化玩具10の形態を変化させることができるため、簡単な操作で形態変化玩具10の形態を変化させることができる。しかも、単に形態変化玩具10の形態を変化させるのみならず、形態変化玩具10を前後に摺動させることもできる。また、操作部68を操作した状態で更に補助操作部81を操作することによって、形態変化玩具10の動きを表現することもできる。このような特徴を利用すれば、本実施形態の複数の形態変化玩具10を組み合わせることによって対戦型の玩具として使用できる。
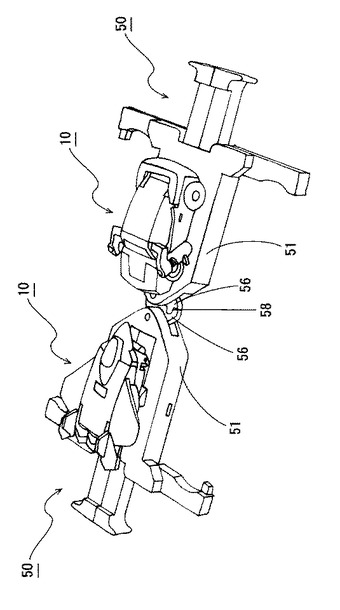
【0094】
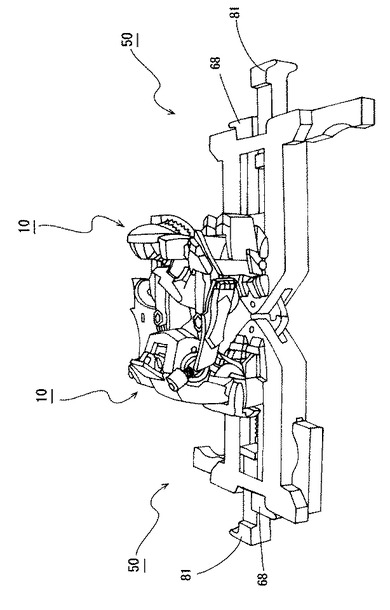
すなわち、基台50の先端には、図13に示すように、他の基台50と連結するための連結部56が設けられている。この連結部56の突端面には、図13や図21に示すように、他の連結部56と対向させたときに互いに噛み合うように嵌合溝58が形成されている。この嵌合溝58を噛み合わせれば、図21に示すように、2つの基台50の先端が連結され、この2つの基台50それぞれに取り付けられた2つの形態変化玩具10が対向して配置されることになる。
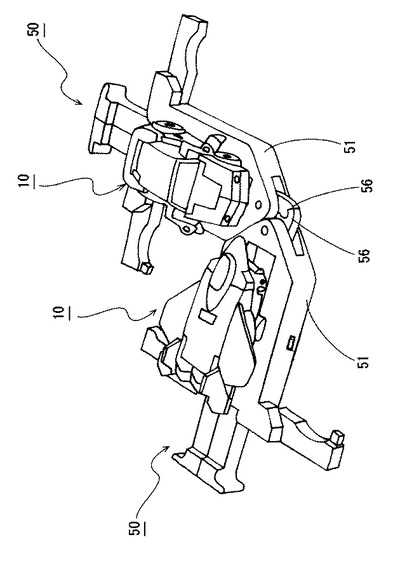
【0095】
なお、この連結部56は、軸孔57を回転中心として水平方向に回動可能にベース体51に取り付けられている。このため、基台50同士が連結されている場合であっても、図21及び図22に示すように、ベース体51はこの軸孔57を中心として水平方向へ回動可能である。
【0096】
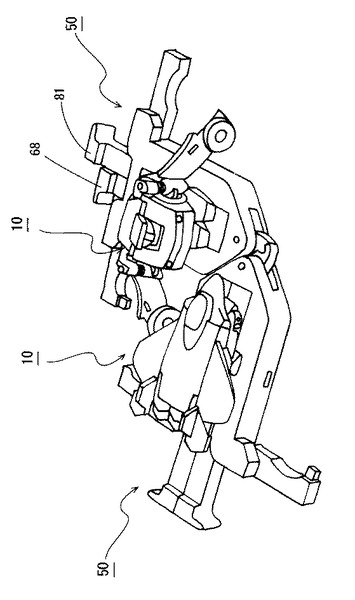
このように2つの基台50の先端を連結した状態で、操作部68を操作すると、図23及び図24に示すように、形態変化玩具10は先端方向へ移動しつつロボットの形態へと変化する。
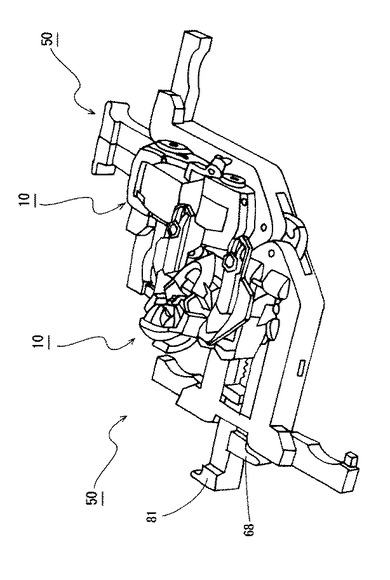
【0097】
連結した基台50上の2つの形態変化玩具10を対向させてロボットの形態へと変化させると、図25に示すように、互いに組み合った状態となる。この状態で補助操作部81を操作すると、前述したように腕部材44が前後に回動するため、2つのロボットが互いに腕を打ちつける動作をする。
【0098】
このように、操作部68を操作して形態変化玩具10を前後に移動させたり、補助操作部81を操作して相手の形態変化玩具10に腕を打ちつける動作をさせたり、ベース体51を水平方向に回動させたりすることにより、形態変化玩具10同士を衝突させたり、衝突を回避したりして、形態変化玩具10を対戦させて遊ぶことができる。このような対戦玩具としての遊び方としては、例えば、相手の形態変化玩具10を基台50から弾き飛ばすことにより勝敗を決することとしてもよい。
【0099】
以上説明したように、本実施形態に係る形態変化玩具10は、複数の基台50を連結して遊べるため、他の形態変化玩具10と相対させて遊ぶこともでき、単に形態変化を楽しむだけでなく、対戦ゲームとして楽しむことができる。
【符号の説明】
【0100】
10 形態変化玩具 11 ベース部材
12 底面 13 差込爪
14 水平ギア(操作子) 14a 突出部
16 一体形成ギア 16a 冠歯車部
16b 平歯車部 20 回動部材
21 前部材 22 上軸支部
23 下軸支部 24 係止部
30 後部材 31 頭部
32 基部ギア 33 軸部
40 リンク部材 41 前輪部
41a 外周縁 41b 内周縁
42 ギアプレート 43 回動軸
44 腕部材 45 回転軸
46 第1接触部 47 第2接触部
48 腕部ギア 49 リングバネ
50 基台 51 ベース体
51a 開口 51b 操作部突出口
52 上カバー 53 下カバー
53a ロック挿入口 54 ハンドル
54a ロック突起 55 ハンドル回転軸
56 連結部 57 軸孔
58 嵌合溝 60 第1摺動体
61 玩具取付部 62 差込固定部
63 ピニオン 64 回転筒(作動部)
64a 嵌合孔 64b ギア部
68 操作部 69 ガイド突起
70 ロック係合部 70a 反先端方向側面
80 第2摺動体 81 補助操作部
82 スリット 83 ラック
84 バネ
【技術分野】
【0001】
この発明は、可逆的に形態が変化する形態変化玩具と、この形態変化玩具を設置可能な基台とを有する玩具装置に関し、特に、基台に設けられた操作部を操作することによって形態変化玩具の形態を変化させる玩具装置に関するものである。
【背景技術】
【0002】
従来、乗物や動物等の一つの形態からロボット等の他の形態に可逆的に形態が変化する形態変化玩具が知られている。こうした形態変化玩具は、基本的に構成部品を順次手動で操作して形態を変化させて遊ぶものであったため、操作の手順が煩雑であった。そこで、簡単な操作で玩具の形態を変化させることができる形態変化玩具も提案されている。
【0003】
例えば、特許文献1には、操作体を操作してスライド部材を前方にスライドさせると形態が変化する形態変化玩具が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平9−10442号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記した特許文献1記載の形態変化玩具は、単に操作体を操作して形態を変化させるものであり、他の形態変化玩具と組み合わせて遊ぶものではなかった。
【0006】
そこで、本発明は、他の形態変化玩具と組み合わせて遊ぶことができ、新規な印象を与える玩具装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明は、上記した課題を解決するためになされたものであり、以下を特徴とする。
【0008】
(請求項1)
請求項1に記載の発明は、以下の点を特徴とする。
【0009】
すなわち、請求項1に記載の玩具装置は、複数の回動部材を回動させることで可逆的に形態が変化する形態変化玩具と、前記形態変化玩具を設置可能な基台と、を有し、前記形態変化玩具は、前記複数の回動部材を回動させるための回動機構と、前記回動機構を作動させるための操作子と、を備え、前記基台は、前記操作子が連結される作動部と、前記作動部を外部から操作させるための操作部と、を備え、前記操作部が操作されると、前記操作子が前記作動部を介して応動し、前記回動機構が作動することを特徴とする。
【0010】
(請求項2)
請求項2に記載の発明は、上記した請求項1記載の発明の特徴点に加え、以下の点を特徴とする。
【0011】
すなわち、前記形態変化玩具は、第1の形態から第2の形態へと形態が変化するものであって、前記操作子は、前記第1の形態及び前記第2の形態のいずれにおいても底面となる面に設けられていることを特徴とする。
【0012】
(請求項3)
請求項3に記載の発明は、上記した請求項1又は2記載の発明の特徴点に加え、以下の点を特徴とする。
【0013】
すなわち、前記基台は、ベース体と、前記ベース体に対して相対的に摺動可能な玩具取付部と、を備えるとともに、前記作動部は前記玩具取付部に形成されており、前記操作部が操作されたときに、前記作動部が作動するとともに、前記玩具取付部が摺動することを特徴とする。
【0014】
(請求項4)
請求項4に記載の発明は、上記した請求項3記載の発明の特徴点に加え、以下の点を特徴とする。
【0015】
すなわち、前記基台は、外部から操作可能な補助操作部を更に備え、前記補助操作部と前記操作部との相対的位置が変化したときに前記作動部が作動することを特徴とする。
【0016】
(請求項5)
請求項5に記載の発明は、上記した請求項3又は4に記載の発明の特徴点に加え、以下の点を特徴とする。
【0017】
すなわち、前記基台の先端部には、他の基台と連結するための連結部が設けられ、前記玩具取付部は、前記基台の先端部方向に向かって摺動可能であることを特徴とする。
【発明の効果】
【0018】
請求項1に記載の発明は上記の通りであり、形態変化玩具を設置可能な基台を備え、基台の操作部が操作されると形態変化玩具の操作子が応動し、回動機構が作動して形態変化玩具の形態が変化するように形成されている。すなわち、形態変化専用の基台を操作することで形態を変化させることができるので、形態変化の態様にかかわらず、違う形態変化玩具を基台に装着した場合でも同じ操作で形態変化を実行することができる。
【0019】
また、請求項2に記載の発明は上記の通りであり、前記形態変化玩具は、第1の形態から第2の形態へと形態が変化するものであって、前記操作子は、前記第1の形態及び前記第2の形態のいずれにおいても底面となる面に設けられている。このため、形態変化玩具を基台に設置する場合には、底面を有する部材が基台に固定されることとなり、この固定された部材をベースとして複数の回動部材が回動して形態が変化する。このため、例えば基部の上に立ち上がるように形態変化させることができ、新規な印象を与える玩具装置を提供できる。
【0020】
また、請求項3に記載の発明は上記の通りであり、操作部が操作されたときに、作動部が作動するとともに、作動部が形成された玩具取付部が摺動するように形成されている。このため、形態変化玩具は、基台上で形態変化しつつ、摺動するように形成されており、新規な印象を与える玩具装置を提供できる。
【0021】
また、請求項4に記載の発明は上記の通りであり、基台は、外部から操作可能な補助操作部を更に備え、補助操作部と操作部との相対的位置が変化したときに作動部が作動するように形成されている。このため、補助操作部と操作部とを同時に操作した場合には、作動部を作動させずに玩具取付部を摺動させることができる。また、操作部を操作した状態で補助操作部を操作した場合には、玩具取付部を摺動後の状態に留まらせた状態で玩具取付部を作動させることができる。このように、形態変化と摺動動作とのバリエーションを持たせることができ、新規な印象を与える玩具装置を提供できる。
【0022】
また、請求項5に記載の発明は上記の通りであり、基台の先端部には、他の基台と連結するための連結部が設けられ、前記玩具取付部は、基台の先端部方向に向かって摺動可能に形成されている。このため、複数の基台を連結することにより、他の形態変化玩具と相対させて遊ぶことができる。
【0023】
この場合において、形態変化玩具が上記したような形態変化や摺動動作を行うようにして、これらの動作により他の形態変化玩具と対戦させるように形成することもできる。例えば、形態変化や摺動動作で形態変化玩具を互いにぶつけ合い、その衝撃で相手の形態変化玩具を基台から外すなどして転倒させることで勝敗を決することとしてもよい。このようにすれば、単に形態変化を楽しむだけでなく、対戦ゲームとして楽しむことができる玩具装置を提供できる。
【図面の簡単な説明】
【0024】
【図1】第1の形態変化玩具の外観図である。
【図2】第1の形態変化玩具の底面図である。
【図3】第1の形態変化玩具の形態変化の過程を示す説明図である。
【図4】第1の形態変化玩具の回動機構を示す説明図である。
【図5】第1の形態変化玩具の腕部材が移動する様子を示す説明図である。
【図6】第1の形態変化玩具の形態変化後の外観図である。
【図7】第2の形態変化玩具の外観図である。
【図8】第2の形態変化玩具の底面図である。
【図9】第2の形態変化玩具の形態変化の過程を示す説明図である。
【図10】第2の形態変化玩具の回動機構を示す説明図である。
【図11】第2の形態変化玩具の形態変化後の外観図である。
【図12】基台の外観図である。
【図13】基台の分解斜視図である。
【図14】基台が作動する様子を示す説明図である。
【図15】基台に第1の形態変化玩具を取り付けた状態を示す図である。
【図16】基台で第1の形態変化玩具を形態変化させた状態を示す図である。
【図17】第1の形態変化玩具を補助操作部で作動させた状態を示す図である。
【図18】基台に第2の形態変化玩具を取り付けた状態を示す図である。
【図19】基台で第2の形態変化玩具を形態変化させた状態を示す図である。
【図20】第2の形態変化玩具を補助操作部で作動させた状態を示す図である。
【図21】基台を連結した状態を示す図である。
【図22】基台を連結した状態を示す図(連結部を揺動させた状態)である。
【図23】基台を連結した状態を示す図(第1の形態変化玩具を形態変化させた状態)である。
【図24】基台を連結した状態を示す図(第2の形態変化玩具を形態変化させた状態)である。
【図25】基台を連結した状態を示す図(対向させた形態変化玩具を形態変化させた状態)である。
【発明を実施するための形態】
【0025】
以下、本発明の実施形態について、図を参照しながら説明する。
【0026】
本実施形態は、第1の形態変化玩具10と、第2の形態変化玩具10と、の2つの形態変化玩具10を備え、これら形態変化玩具10を単独で形態変化させて遊ぶことができるのみならず、2つの形態変化玩具10を組み合わせて遊ぶこともできるものである。
【0027】
(第1の形態変化玩具10)
まず、第1の形態変化玩具10について説明する。
【0028】
第1の形態変化玩具10は、図1〜6に示すように、複数の回動部材20を回動させることで第1の形態から第2の形態へと可逆的に形態が変化するものである。この第1の形態変化玩具10は、前記第1の形態として輸送機器(具体的には、自動車)の形態をとり(図1参照)、前記第2の形態としてロボットの形態をとる(図6参照)ように形成されている。
【0029】
この第1の形態変化玩具10は、図1及び図2に示すように、後輪側で接地する底面12を有するベース部材11と、このベース部材11に回動可能に連結された複数の回動部材20と、を備えている。
【0030】
前記ベース部材11の内部には、水平ギア14(操作子)が設けられており、この水平ギア14を回転させることにより、前記複数の回動部材20が回動して形態が変化するように形成されている。この水平ギア14の下端部は、図1及び図2に示すように、底面12からベース部材11の外部へと突出しており、これにより、外部から操作可能な突出部14aを形成している。すなわち、この突出部14aを操作することで水平ギア14が回転し、この水平ギア14の回転によって、後述する回動機構を作動させ、複数の回動部材20を回動させるようになっている。
【0031】
ここで、第1の形態変化玩具10は、図1及び図2に示すように、以下の回動部材20を備えている。すなわち、ベース部材11に連結されて自動車形態の上部を覆うように設けられる後部材30と、この後部材30と連結されて自動車形態の両側を覆う2つの腕部材44と、ベース部材11に連結されて自動車形態の内部に収容される前部材21と、後部材30と前部材21とを連結して自動車形態のフロント部分を形成するリンク部材40と、を備えている。
【0032】
これらの回動部材20は、水平ギア14の回転によって回動するものであり、おおよそ以下のように第1の形態から第2の形態へと変化する。すなわち、図3に示すように、水平ギア14の回転力を駆動力として後部材30が立ち上げられるとともに、この後部材30と連動して前部材21が立ち上げられる。また、リンク部材40が接触することによって2つの腕部材44が軸回転し、この2つの腕部材44が前方に突き出される。
【0033】
以下、この形態変化について詳しく説明する。
【0034】
図4は、第1の形態変化玩具10に係る回動機構を示す説明図であり、この図4が示すように、ベース部材11の内部には冠歯車部16aと平歯車部16bとが一体形成された一体形成ギア16が設けられている。そして、この一体形成ギア16の冠歯車部16aが、前述した水平ギア14と噛み合うように配置されている。このため、水平ギア14の突出部14aを回転させると、水平ギア14と噛み合った一体形成ギア16が回転する。
【0035】
更に、後部材30の基部(自動車形態における後端部)には、前述した一体形成ギア16の平歯車部16bと噛み合う基部ギア32が形成されているため、一体形成ギア16が回転すると、基部ギア32の中心に設けられた軸部33を中心として、後部材30が立ち上がる方向へと回動する。
【0036】
ここで、前部材21は、一端側が下軸支部23を介してベース部材11に回動可能に連結され、他端側が上軸支部22を介してリンク部材40に回動可能に連結されている。しかも、このリンク部材40は、前部材21と後部材30とを連結しているため、これらベース部材11、前部材21、後部材30、リンク部材40、の4つの部材によって、4節を連結したリンク機構が形成されている。このリンク機構においては、ベース部材11が固定節であり、後部材30が原動節となっているため、上述したように後部材30が立ち上がる方向へと回動すると、これに従属して前部材21も作動し、下軸支部23を回転中心として立ち上がる方向へと回動する。
【0037】
そして、前部材21及び後部材30がほぼ垂直にまで立ち上がると、前部材21の内側面と後部材30の内側面とが当接して、それ以上回動しないようになっている。このため、前部材21と後部材30とがちょうどベース部材11上に立ち上がる位置で回動がストップし、第2の形態への形態変化が完了する。
【0038】
なお、図4に示すように、このリンク機構が作動する過程でリンク部材40の内部に収容されていた後部材30の先端が外部に露出するが、この後部材30の先端部は形態変化後のロボット形態において頭部31となるものである。
【0039】
ところで、上記のように前部材21及び後部材30が立ち上げられて形態が変化しているとき、両側の腕部材44は、リンク機構の作動によって移動したリンク部材40と接触することにより、前方に突き出されるように回動する。
【0040】
すなわち、腕部材44は、図4に示すように、回転軸45を軸として後部材30に回動可能に取り付けられており、通常時においては、リングバネ49によって自動車の形態に適した位置へと付勢されている。しかしながら、図5に示すように、水平ギア14が回転することによりリンク部材40が移動すると、腕部材44はこのリンク部材40に押動されて、リングバネ49の付勢力に反して回転する。
【0041】
ここで、図5は、上記したリンク機構が作動してリンク部材40と腕部材44とが接触する様子を示す図であり、この接触部を底面側から見た図である(図2参照)。この図5(a)に示すように、リンク機構が作動すると、リンク部材40の前輪部41は腕部材44の方向へと移動する。すると、図5(b)に示すように、前輪部41の外周縁41aが腕部材44の第1接触部46と当接し、リングバネ49の付勢力に反して腕部材44を約90度回転させる。
【0042】
このとき、腕部材44の第2接触部47が前輪部41の内側に入り込むため、更に前輪部41が腕部材44の方向へと移動すると、図5(c)に示すように、前輪部41の内周縁41bが腕部材44の第2接触部47と当接し、更に腕部材44を約90度回転させる。このようにして、図5(d)に示すように、腕部材44は回転軸45を中心に約180度回転して停止する。
【0043】
ここで、腕部材44は、図6に示すように、回転軸45に対して約45度の方向に延びているため、上記したように平面視において約180度回転したときに、側面視においては約90度回転することになる。このため、形態変化完了時においては、腕部材44は、図6に示すような前方に突き出した状態となる。
【0044】
上記したように、水平ギア14の突出部14aを回転させると、後部材30が回動するとともにリンク機構が作動し、更に腕部材44が回転させられて、図6に示すように、形態変化玩具10が第2の形態であるロボットの形態に変化する。
【0045】
すなわち、この第2の形態においては、図6に示すように、ベース部材11が膝下脚部を形成し、後部材30が背中及び頭部31を形成し、腕部材44が腕を形成し、前部材21が前面の胴体部を形成し、リンク部材40が胸部を形成することにより、両手を前に突き出して起立した姿勢のロボットの形態が構成される。
【0046】
なお、上記では自動車の形態からロボットの形態へと変化する態様について説明したが、水平ギア14の突出部14aを逆回転させれば、ロボットの形態から自動車の形態へと変化することは言うまでもない。すなわち、水平ギア14の突出部14aを逆回転させると、前記したリンク機構が逆に作動し、前部材21、後部材30、及びリンク部材40が、第1の形態を構成する位置へと回動する。そして、リンク部材40が回動したことにより、腕部材44と前輪部41との係合が外れるため、リングバネ49の不勢力に従い、腕部材44が第1の形態を構成する位置へと回動し、第1の形態への形態変化が完了する。
【0047】
以上のように、本実施形態に係る形態変化玩具10は、外部から操作可能に形成された水平ギア14を回転させることにより、回動機構が作動して形態が変化する。このため、外表面に形成されるのは水平ギア14のみであり、玩具のデザインや機能を制限することなく、簡単な操作で形態を変化させることができる。
【0048】
また、水平ギア14は回転式であるため、スライド式や押下式などとは異なり、操作範囲が制限されない。すなわち、幅などの制限がなく回転数に応じて回動機構に駆動力を与えることができるため、回動機構の構成が制限されず、形態変化にバリエーションを持たせることができる。
【0049】
水平ギア14は、前記第1の形態及び前記第2の形態のいずれにおいても底面12に形成されているため、玩具のデザインや機能に与える影響を最小限とすることができる。
【0050】
(第2の形態変化玩具10)
次に、第2の形態変化玩具10について説明する。
【0051】
第2の形態変化玩具10は、図7〜11に示すように、複数の回動部材20を回動させることで第1の形態から第2の形態へと可逆的に形態が変化するものである。この第2の形態変化玩具10は、前記第1の形態として輸送機器(具体的には、飛行機)の形態をとり(図7参照)、前記第2の形態としてロボットの形態をとる(図11参照)ように形成されている。
【0052】
この第2の形態変化玩具10は、図1及び図2に示すように、後部側で接地する底面12を有するベース部材11と、このベース部材11に回動可能に連結された複数の回動部材20と、を備えている。
【0053】
前記ベース部材11の内部には、第1の形態変化玩具10と同様に、水平ギア14(操作子)が設けられており、この水平ギア14を回転させることにより、前記複数の回動部材20が回動して形態が変化するように形成されている。また、第1の形態変化玩具10と同様に、この水平ギア14の下端部は、図7及び図8に示すように、底面12からベース部材11の外部へと突出しており、これにより、外部から操作可能な突出部14aを形成している。すなわち、この突出部14aを操作することで水平ギア14が回転し、この水平ギア14の回転によって、後述する回動機構を作動させ、複数の回動部材20を回動させるようになっている。
【0054】
ここで、第2の形態変化玩具10は、図7及び図8に示すように、以下の回動部材20を備えている。すなわち、ベース部材11に連結されて飛行機形態の上部を覆うように設けられる後部材30と、この後部材30と連結されて飛行機形態の両翼を形成する2つの腕部材44と、ベース部材11に連結されて飛行機形態の下部に設けられる前部材21と、後部材30と前部材21とを連結して飛行機形態のノーズ部分を形成するリンク部材40と、を備えている。
【0055】
これらの回動部材20は、水平ギア14の回転によって回動するものであり、おおよそ以下のように第1の形態から第2の形態へと変化する。すなわち、図9に示すように、水平ギア14の回転力を駆動力として後部材30が立ち上げられるとともに、この後部材30と連動して前部材21が立ち上げられる。また、第2の形態変化玩具10の内部に設けられた回動機構によって、2つの腕部材44が前方に突き出されるように回動する。
【0056】
以下、この形態変化について詳しく説明する。
【0057】
図10は、第2の形態変化玩具10に係る回動機構を示す説明図であり、この図10が示すように、ベース部材11の内部には冠歯車部16aと平歯車部16bとが一体形成された一体形成ギア16が設けられている。そして、この一体形成ギア16の冠歯車部16aが、前述した水平ギア14と噛み合うように配置されている。このため、水平ギア14の突出部14aを回転させると、水平ギア14と噛み合った一体形成ギア16が回転する。
【0058】
更に、後部材30の基部(飛行機形態における後端部)には、前述した一体形成ギア16の平歯車部16bと噛み合う基部ギア32が形成されているため、一体形成ギア16が回転すると、基部ギア32の中心に設けられた軸部33を中心として、後部材30が立ち上がる方向へと回動する。
【0059】
ここで、前部材21は、一端側が下軸支部23を介してベース部材11に回動可能に連結され、他端側が上軸支部22を介してリンク部材40に回動可能に連結されている。しかも、このリンク部材40は、前部材21と後部材30とを連結しているため、これらベース部材11、前部材21、後部材30、リンク部材40、の4つの部材によって、4節を連結したリンク機構が形成されている。このリンク機構においては、ベース部材11が固定節であり、後部材30が原動節となっているため、上述したように後部材30が立ち上がる方向へと回動すると、これに従属して前部材21も作動し、下軸支部23を回転中心として立ち上がる方向へと回動する。
【0060】
そして、前部材21及び後部材30がほぼ垂直にまで立ち上がると、前部材21の内側面と後部材30の内側面とが当接して、それ以上回動しないようになっている。このため、前部材21と後部材30とがちょうどベース部材11上に立ち上がる位置で回動がストップし、第2の形態への形態変化が完了する。
【0061】
なお、図10に示すように、このリンク機構が作動する過程でリンク部材40の内部に収容されていた後部材30の先端が外部に露出するが、この後部材30の先端部は形態変化後のロボット形態において頭部31となるものである。
【0062】
ところで、上記のように前部材21及び後部材30が立ち上げられて形態が変化しているとき、両側の腕部材44は、形態変化玩具10の内部に配置された回動機構によって、前方に突き出されるように回動する。
【0063】
すなわち、形態変化玩具10の内部には、図10に示すように、内歯を有する半円弧状のギアプレート42が設けられており、このギアプレート42は、上軸支部22及び回動軸43によって、前部材21と後部材30とに連結されている。このため、水平ギア14の突出部14aが回転して前部材21と後部材30との相対位置が変化すると、これに応動してギアプレート42も回動軸43を中心として回動する。なお、後部材30の背面側には図示しない貫通孔が形成されており、回動することにより形態変化玩具10の内部に収まりきらなくなったギアプレート42の一部は、この貫通孔から突出するようになっている。
【0064】
そして、このギアプレート42の内歯には、図10に示すように、腕部材44の基端部付近に設けられた腕部ギア48が噛み合っているため、ギアプレート42が移動すると腕部ギア48が回転し、腕部材44が回動する。すなわち、図10に示すように、前部材21及び後部材30が立ち上がる方向に回動した場合、ギアプレート42は背面側に突出するように移動するため、腕部材44は上方及び前方へと回動する。そして、図11に示すように、最終的には腕部材44は約270度回転し、形態変化完了時においては前方へ突き出されるようになっている。なお、約270度回転した腕部材44は係止部24に下方を支持されるため、それ以上回動しない。
【0065】
上記したように、水平ギア14の突出部14aを回転させると、後部材30が回動するとともにリンク機構が作動し、更に腕部材44が回転させられて、図11に示すように、形態変化玩具10が第2の形態であるロボットの形態に変化する。
【0066】
すなわち、この第2の形態においては、図11に示すように、ベース部材11が脚部を形成し、後部材30が背中及び頭部31を形成し、腕部材44が腕を形成し、前部材21が前面の胴体部を形成し、リンク部材40が胸部を形成することにより、両手を前に突き出して起立した姿勢のロボットの形態が構成される。
【0067】
なお、上記では飛行機の形態からロボットの形態へと変化する態様について説明したが、水平ギア14の突出部14aを逆回転させれば、ロボットの形態から飛行機の形態へと変化することは言うまでもない。すなわち、水平ギア14の突出部14aを逆回転させると、前記したリンク機構が逆に作動し、前部材21、後部材30、及びリンク部材40が、第1の形態を構成する位置へと回動する。そして、ギアプレート42は形態変化玩具10の内部へと収容される方向に移動するため、腕部材44が第1の形態を構成する方向へと回動し、第1の形態への形態変化が完了する。
【0068】
以上のように、本実施形態に係る形態変化玩具10は、外部から操作可能に形成された水平ギア14を回転させることにより、回動機構が作動して形態が変化する。このため、外表面に形成されるのは水平ギア14のみであり、玩具のデザインや機能を制限することなく、簡単な操作で形態を変化させることができる。
【0069】
また、水平ギア14は回転式であるため、スライド式や押下式などとは異なり、操作範囲が制限されない。すなわち、幅などの制限がなく回転数に応じて回動機構に駆動力を与えることができるため、回動機構の構成が制限されず、形態変化にバリエーションを持たせることができる。
【0070】
水平ギア14は、前記第1の形態及び前記第2の形態のいずれにおいても底面12に形成されているため、玩具のデザインや機能に与える影響を最小限とすることができる。
【0071】
(基台50を使用した形態変化)
上記したように、本実施形態に係る形態変化玩具10は、第1の形態及び第2の形態のいずれにおいても底面12に水平ギア14の突出部14aが形成されている。このため、この底面12を固定する基台50を設け、この基台50によって水平ギア14の突出部14aを操作することができる。すなわち、基台50を使用することにより、簡単な操作で形態変化玩具10の形態を変化させることができる。
【0072】
基台50は、図12に示すように、板状のベース体51と、前記ベース体51の内部に押し込み操作可能に形成された第1摺動体60及び第2摺動体80と、前記ベース体51の基部両側に設けられたハンドル54と、を備えている。
【0073】
ベース体51は、図13に示すように、上カバー52と下カバー53とを上下に接合して構成され、上カバー52の上面中央には開口51aが設けられている。このベース体51の内部には第1摺動体60及び第2摺動体80が収容され、前述した開口51aからは、後述する玩具取付部61の上面が露出している。また、反先端側の側面には、図12に示すように、操作部突出口51bが設けられており、この操作部突出口51bからは、第1摺動体60の操作部68及び第2摺動体80の補助操作部81が突出している。
【0074】
第1摺動体60は、図12に示すように、操作部突出口51bから突出した操作部68と、この操作部68の先端部に設けられた玩具取付部61と、を備えている。玩具取付部61は形態変化玩具10を取り付けるためのものであり、操作部68を押し込み操作することによって、ベース体51に対して相対的に摺動可能に形成されている。
【0075】
前述したように、この玩具取付部61の上面はベース体51の開口51aから露出しており、図12が示すように、形態変化玩具10を取り付けるための差込固定部62と、軸方向に嵌合孔64aを有する回転筒64(作動部)と、が玩具取付部61の内部から突出するように設けられている。この差込固定部62及び回転筒64は、いずれも形態変化玩具10に連結される。すなわち、差込固定部62は、形態変化玩具10の差込爪13に係合され、回転筒64は、形態変化玩具10の水平ギア14に連結される。なお、回転筒64と水平ギア14との連結は、回転筒64の嵌合孔64aに水平ギア14の突出部14aを差し込むことで行われる。この嵌合孔64a及び突出部14aは、いずれも蹄状に形成されているため、連結後に回転筒64が回転されると、その回転力が水平ギア14に伝達可能となっている。
【0076】
この玩具取付部61を摺動させるための操作部68は、図12に示すように、ベース体51の操作部突出口51bから突出した棒状部であり、外部から操作可能に形成されている。すなわち、この操作部68をベース体51の内部へ押し込むと、前記した玩具取付部61が基台50の先端方向に向かって摺動する。このため、玩具取付部61に形態変化玩具10を取り付けた上で操作部68を押し込み操作すると、形態変化玩具10も一緒に基台50の先端方向へ移動するようになっている。
【0077】
一方、第2摺動体80は、第1摺動体60と並列的にベース体51の内部に収容されるものであり、第1摺動体60の操作部68と同様に、棒状の補助操作部81を有している。この補助操作部81も、図12に示すように、ベース体51の操作部突出口51bから突出しており、外部から操作可能である。
【0078】
第2摺動体80は、図13に示すように、ベース体51の内部において第1摺動体60と対向する面にラック83が形成されており、第1摺動体60の内部に配置されたピニオン63と噛み合うようになっている。これにより、操作部68と補助操作部81との相対的位置が変化したときに回転筒64が回転するように形成されている。
【0079】
すなわち、操作部68又は補助操作部81のいずれかが操作されたことにより、操作部68と補助操作部81との相対的位置が変化すると、第2摺動体80のラック83により第1摺動体60のピニオン63に回転力が与えられる。このピニオン63は、図13に示すように、玩具取付部61の内部において回転筒64の下部に一体形成されたギア部64bと噛合している。このため、ピニオン63が回転すると回転筒64が回転するようになっている。
【0080】
このため、玩具取付部61に形態変化玩具10を取り付けた状態で操作部68と補助操作部81との相対的位置が変化すると、回転筒64に連結された水平ギア14が回転して、形態変化玩具10の形態が変化する。
【0081】
以下、玩具取付部61の摺動動作及び回転筒64の回転動作を図示した図14を参照しつつ、詳しく説明する。
【0082】
まず、図14(a)が示すように、通常時においては、操作部68及び補助操作部81は、いずれもバネ84によって後方へ付勢されており、言い換えると、ベース体51の操作部突出口51bから突出する方向へと付勢されている。
【0083】
この状態で操作部68のみを押し込み操作すると、図14(b)に示すように、玩具取付部61が先端方向へと摺動するとともに、ラック83上をピニオン63が回転し、これにより回転筒64が平面視で時計周りに回転する。このため、回転筒64に形態変化玩具10の水平ギア14が連結されている場合、形態変化玩具10の水平ギア14が第1の形態から第2の形態へと変化する方向へ回転するようになっている。
【0084】
また、図14(b)の状態から更に補助操作部81を押し込み操作すると、図14(c)に示すように、玩具取付部61の位置は先端方向に留まったままで、ラック83上をピニオン63が回転し、これにより回転筒64が平面視で反時計周りに回転する。すなわち、操作部68のみを押し込み操作した場合の回転方向とは逆の方向へと回転する。このため、回転筒64に形態変化玩具10の水平ギア14が連結されている場合、形態変化玩具10の水平ギア14が第2の形態から第1の形態へと変化する方向へ回転するようになっている。
【0085】
なお、図14(a)に示すように、操作部68の側面にはガイド突起69が形成されるとともに、補助操作部81の側面にはスリット82が形成されており、このスリット82に沿ってガイド突起69を有する操作部68が摺動するように形成されている。ここで、図14(a)の状態において、スリット82の端部がガイド突起69に当接しているため、この図14(a)の状態から補助操作部81を押し込み操作した場合、操作部68も一緒に押し込まれるように形成されている。このため、図14(a)の状態から補助操作部81を押し込み操作すると、玩具取付部61が先端方向へと摺動するが、操作部68と補助操作部81との相対的位置が変化しないため、回転筒64は回転せず、形態変化玩具10の形態は変化しない。このように、補助操作部81を押し込み操作することによって、形態変化玩具10の形態は変化させずに、玩具取付部61を摺動させることもできる。
【0086】
ここで、図15〜20は、実際に基台50に形態変化玩具10を取り付けた様子を示す図であり、図15〜17は第1の形態変化玩具10、図18〜20は第2の形態変化玩具10に係るものである。
【0087】
図15及び図18が示すように、操作部68及び補助操作部81が操作されていない場合には、形態変化玩具10は第1の形態をとっている。
【0088】
図16及び図19が示すように、操作部68を可能な限り奥まで押し込み操作した場合には、玩具取付部61(すなわち、形態変化玩具10)が先端方向に摺動するとともに、形態変化玩具10は第2の形態に変化する。
【0089】
図17及び図20が示すように、操作部68を可能な限り奥まで押し込み操作した状態で、補助操作部81を押し込み操作すると、形態変化玩具10は第1の形態と第2の形態との間の形態変化途中の形態に変化する。この補助操作部81の操作を行うことで、形態変化玩具10が動いている状態を表現することができる。すなわち、補助操作部81を押し操作することで、図17及び図20が示すような前方に倒れ込んだ状態とするとともに、補助操作部81の操作を解除すれば、図16及び図19が示すような直立姿勢に戻る。このとき、腕部材44は前後に回動するため、ロボットが腕を前に打ちつける動作をさせることができる。
【0090】
なお、図12に示すように、ハンドル54の先端部にはロック突起54aが設けられており、このロック突起54aをベース体51のロック挿入口53aに差し込むことで、操作部68を操作した状態に保つことができる。すなわち、ハンドル54は、ハンドル回転軸55を中心に回動可能に形成されているため、操作部68を奥まで押し込み操作した状態でハンドル54を回動させ、ロック突起54aをロック挿入口53aに差し込むと、このロック突起54aが操作部68の側面に設けられたロック係合部70の反先端方向側面70aに係合し、操作部68がバネ84の付勢力によって押し戻されるのをロックするようになっている。このように操作部68をロックすれば、補助操作部81のみを押し操作すればよいため、玩具取付部61を先端方向に位置させたままで、上記したような形態変化玩具10の動きを表現させることができる。
【0091】
以上のように、本実施形態に係る形態変化玩具10は、基台50を操作することで形態変化玩具10の形態を変化可能に形成されているため、異なる形態変化玩具10を基台50に装着した場合でも同じ操作で形態変化を実行できる。
【0092】
また、形態変化玩具10は底面12が基台に設置されてベース部材11の上に立ち上がるように形態変化する。しかも、玩具取付部61を基台50上で摺動させたり、ベース体51を回動操作したりできるため、これらの操作を単独又は組み合わせておこなうことにより、従来にないバリエーションに富んだ操作が可能である。
【0093】
(対戦玩具としての遊び方)
上記したように、本実施形態によれば、形態変化専用の基台50を操作することで形態変化玩具10の形態を変化させることができるため、簡単な操作で形態変化玩具10の形態を変化させることができる。しかも、単に形態変化玩具10の形態を変化させるのみならず、形態変化玩具10を前後に摺動させることもできる。また、操作部68を操作した状態で更に補助操作部81を操作することによって、形態変化玩具10の動きを表現することもできる。このような特徴を利用すれば、本実施形態の複数の形態変化玩具10を組み合わせることによって対戦型の玩具として使用できる。
【0094】
すなわち、基台50の先端には、図13に示すように、他の基台50と連結するための連結部56が設けられている。この連結部56の突端面には、図13や図21に示すように、他の連結部56と対向させたときに互いに噛み合うように嵌合溝58が形成されている。この嵌合溝58を噛み合わせれば、図21に示すように、2つの基台50の先端が連結され、この2つの基台50それぞれに取り付けられた2つの形態変化玩具10が対向して配置されることになる。
【0095】
なお、この連結部56は、軸孔57を回転中心として水平方向に回動可能にベース体51に取り付けられている。このため、基台50同士が連結されている場合であっても、図21及び図22に示すように、ベース体51はこの軸孔57を中心として水平方向へ回動可能である。
【0096】
このように2つの基台50の先端を連結した状態で、操作部68を操作すると、図23及び図24に示すように、形態変化玩具10は先端方向へ移動しつつロボットの形態へと変化する。
【0097】
連結した基台50上の2つの形態変化玩具10を対向させてロボットの形態へと変化させると、図25に示すように、互いに組み合った状態となる。この状態で補助操作部81を操作すると、前述したように腕部材44が前後に回動するため、2つのロボットが互いに腕を打ちつける動作をする。
【0098】
このように、操作部68を操作して形態変化玩具10を前後に移動させたり、補助操作部81を操作して相手の形態変化玩具10に腕を打ちつける動作をさせたり、ベース体51を水平方向に回動させたりすることにより、形態変化玩具10同士を衝突させたり、衝突を回避したりして、形態変化玩具10を対戦させて遊ぶことができる。このような対戦玩具としての遊び方としては、例えば、相手の形態変化玩具10を基台50から弾き飛ばすことにより勝敗を決することとしてもよい。
【0099】
以上説明したように、本実施形態に係る形態変化玩具10は、複数の基台50を連結して遊べるため、他の形態変化玩具10と相対させて遊ぶこともでき、単に形態変化を楽しむだけでなく、対戦ゲームとして楽しむことができる。
【符号の説明】
【0100】
10 形態変化玩具 11 ベース部材
12 底面 13 差込爪
14 水平ギア(操作子) 14a 突出部
16 一体形成ギア 16a 冠歯車部
16b 平歯車部 20 回動部材
21 前部材 22 上軸支部
23 下軸支部 24 係止部
30 後部材 31 頭部
32 基部ギア 33 軸部
40 リンク部材 41 前輪部
41a 外周縁 41b 内周縁
42 ギアプレート 43 回動軸
44 腕部材 45 回転軸
46 第1接触部 47 第2接触部
48 腕部ギア 49 リングバネ
50 基台 51 ベース体
51a 開口 51b 操作部突出口
52 上カバー 53 下カバー
53a ロック挿入口 54 ハンドル
54a ロック突起 55 ハンドル回転軸
56 連結部 57 軸孔
58 嵌合溝 60 第1摺動体
61 玩具取付部 62 差込固定部
63 ピニオン 64 回転筒(作動部)
64a 嵌合孔 64b ギア部
68 操作部 69 ガイド突起
70 ロック係合部 70a 反先端方向側面
80 第2摺動体 81 補助操作部
82 スリット 83 ラック
84 バネ
【特許請求の範囲】
【請求項1】
複数の回動部材を回動させることで可逆的に形態が変化する形態変化玩具と、
前記形態変化玩具を設置可能な基台と、
を有し、
前記形態変化玩具は、前記複数の回動部材を回動させるための回動機構と、前記回動機構を作動させるための操作子と、を備え、
前記基台は、前記操作子が連結される作動部と、前記作動部を外部から操作させるための操作部と、を備え、
前記操作部が操作されると、前記操作子が前記作動部を介して応動し、前記回動機構が作動することを特徴とする、玩具装置。
【請求項2】
前記形態変化玩具は、第1の形態から第2の形態へと形態が変化するものであって、
前記操作子は、前記第1の形態及び前記第2の形態のいずれにおいても底面となる面に設けられていることを特徴とする、請求項1記載の玩具装置。
【請求項3】
前記基台は、ベース体と、前記ベース体に対して相対的に摺動可能な玩具取付部と、を備えるとともに、前記作動部は前記玩具取付部に形成されており、
前記操作部が操作されたときに、前記作動部が作動するとともに、前記玩具取付部が摺動することを特徴とする、請求項1又は2記載の玩具装置。
【請求項4】
前記基台は、外部から操作可能な補助操作部を更に備え、
前記補助操作部と前記操作部との相対的位置が変化したときに前記作動部が作動することを特徴とする、請求項3記載の玩具装置。
【請求項5】
前記基台の先端には、他の基台と連結するための連結部が設けられ、
前記玩具取付部は、前記基台の先端方向に向かって摺動可能であることを特徴とする、請求項3又は4記載の玩具装置。
【請求項1】
複数の回動部材を回動させることで可逆的に形態が変化する形態変化玩具と、
前記形態変化玩具を設置可能な基台と、
を有し、
前記形態変化玩具は、前記複数の回動部材を回動させるための回動機構と、前記回動機構を作動させるための操作子と、を備え、
前記基台は、前記操作子が連結される作動部と、前記作動部を外部から操作させるための操作部と、を備え、
前記操作部が操作されると、前記操作子が前記作動部を介して応動し、前記回動機構が作動することを特徴とする、玩具装置。
【請求項2】
前記形態変化玩具は、第1の形態から第2の形態へと形態が変化するものであって、
前記操作子は、前記第1の形態及び前記第2の形態のいずれにおいても底面となる面に設けられていることを特徴とする、請求項1記載の玩具装置。
【請求項3】
前記基台は、ベース体と、前記ベース体に対して相対的に摺動可能な玩具取付部と、を備えるとともに、前記作動部は前記玩具取付部に形成されており、
前記操作部が操作されたときに、前記作動部が作動するとともに、前記玩具取付部が摺動することを特徴とする、請求項1又は2記載の玩具装置。
【請求項4】
前記基台は、外部から操作可能な補助操作部を更に備え、
前記補助操作部と前記操作部との相対的位置が変化したときに前記作動部が作動することを特徴とする、請求項3記載の玩具装置。
【請求項5】
前記基台の先端には、他の基台と連結するための連結部が設けられ、
前記玩具取付部は、前記基台の先端方向に向かって摺動可能であることを特徴とする、請求項3又は4記載の玩具装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】

【図18】
【図19】

【図20】

【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2011−254988(P2011−254988A)
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2010−132032(P2010−132032)
【出願日】平成22年6月9日(2010.6.9)
【出願人】(000003584)株式会社タカラトミー (248)
【Fターム(参考)】
【公開日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成22年6月9日(2010.6.9)
【出願人】(000003584)株式会社タカラトミー (248)
【Fターム(参考)】
[ Back to top ]