
画像レーダ装置
【課題】目標の相対運動と3次元形状を推定することのできる画像レーダ装置を得る。
【解決手段】目標に対して送信電波を照射するための送信機1及び送受信アンテナ3と、前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用補助アンテナ4,5および受信機6〜8と、前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部9と、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段11とを備える。
【解決手段】目標に対して送信電波を照射するための送信機1及び送受信アンテナ3と、前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用補助アンテナ4,5および受信機6〜8と、前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部9と、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段11とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、送信電波と反射電波からなる受信電波とに基づき遠方の目標を観測して、目標の形状、反射強度分布、種類などを特定する画像レーダ装置に関するものである。
【背景技術】
【0002】
従来の画像レーダ装置においては、異なる時刻に送受信された電波から得られる2枚のレーダ画像(以下、単に「画像」ともいう)を比較して、レーダ画像上の輝点の画像上での速度分布を収集し、適当な方法で画像レーダ装置と目標との相対運動を推定したうえで、相対運動情報を用いて目標上の電波反射点の3次元空間における位置を算出することにより、目標の3次元形状を得ている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−337163号公報(第5−8頁、図1−図5)
【発明の概要】
【発明が解決しようとする課題】
【0004】
レーダ画像は、目標の三次元形状を、レーダの視線方向と目標の相対運動で決まる二次元の投影面に投影したものとして得られる。レーダの観測においては、目標は、電波を反射する複数の孤立反射点の集合と考えることが出来る。レーダ画像においては、これらの孤立反射点の位置を二次元平面に投影した位置に、輝点が現れる。
【0005】
ところで、レーダ画像を用いて目標の三次元形状を推定するためには、レーダ画像の投影面の向きを知る必要がある。前述の通り、レーダ画像の投影面の向きを決定する要素の一つに、レーダと目標の相対運動が含まれるが、三次元形状を推定する従来の画像レーダ装置においては、レーダと目標との相対運動の推定方法が明確に設定されておらず、画像レーダ装置以外の何らかの手段で画像レーダ装置と目標との相対運動を別途推定する必要があった。特に、ISAR(Inverse Synthetic Aperture Radar)方式によるレーダ画像生成の際は、目標運動は一般に未知であり、目標の相対運動を事前に推定するのは困難であった。
【0006】
この発明は、上記課題を解決するためになされたものであり、目標の相対運動と3次元形状を推定することのできる画像レーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る画像レーダ装置は、目標に対して送信電波を照射する送信手段と、前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用アンテナおよび受信機と、前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部と、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段とを備えたものである。
【発明の効果】
【0008】
この発明によれば、複数のレーダ動画像から観測された視線方向の位置およびドップラー周波数に加えて、観測信号の位相差の情報を利用できるように構成したので、目標の運動と三次元形状を同時に推定することが可能となる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態1に係る画像レーダ装置の機能構成を示すブロック図である。
【図2】この発明の実施の形態1に係る画像レーダ装置の動作原理を説明するもので、観測のジオメトリを示す図である。
【図3】この発明の実施の形態1に係る画像レーダ装置の動作原理を説明するもので、各アンテナで受信された信号を用いて得られるISAR動画像の概念図である。
【図4】この発明の実施の形態1に係る画像レーダ装置の動作原理を説明するもので、観測された位相差の値に直線を当てはめて位相差の変化率を求める概念図である。
【図5】この発明の実施の形態2に係る画像レーダ装置の機能構成を示すブロック図である。
【図6】この発明の実施の形態3に係る画像レーダ装置の機能構成を示すブロック図である。
【図7】この発明の実施の形態4に係る画像レーダ装置の機能構成を示すブロック図である。
【図8】この発明の実施の形態5に係る画像レーダ装置の機能構成を示すブロック図である。
【図9】この発明の実施の形態5に係る画像レーダ装置の動作を説明するための説明図である。
【図10】図9のレンジ方向加速度利用型目標形状・角速度算出部17aの内部構成を示すブロック図ある。
【図11】この発明の実施の形態6に係る画像レーダ装置の機能構成を示すブロック図である。
【図12】この発明の実施の形態6に係る画像レーダ装置の動作を説明するための説明図である。
【図13】図11の加速度利用型目標形状・角速度算出部17bの内部構成を示すブロック図ある。
【図14】この発明の実施の形態7に係る画像レーダ装置の機能構成を示すブロック図である。
【図15】図14の時変角速度考慮型目標形状・角速度算出部17cの内部構成を示すブロック図ある。
【発明を実施するための形態】
【0010】
実施の形態1.
図1は、この発明の実施の形態1に係る画像レーダ装置の機能構成を示すブロック図である。また、図2乃至図4はこの発明の実施の形態1に係る画像レーダ装置の動作原理を説明するための説明図である。以下では、まず、図2乃至図4を用いて、本実施の形態1に係る画像レーダ装置の動作原理を説明する。なお、本明細書においては、画像レーダの方式としてISAR方式を対象として記載するが、SAR(Synthetic Aperture Radar)方式や、その他の画像レーダ方式を用いたものについても、同様の原理が成立することは明らかである。
【0011】
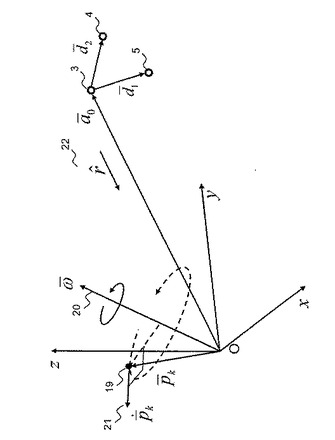
図2は、観測のジオメトリを示す図である。まず、目標は複数の孤立反射点から成る一つの剛体と考える。図2において、19はこの目標を構成する孤立反射点のうちの一つPk(k=1,2,・・・,K;Kは孤立反射点の数)の位置を示す。また、孤立反射点Pkの位置ベクトルを
【0012】
【数1】

【0013】
とする。
【0014】
次に、ここでは、目標が等角速度運動をしていることを前提とし、その角速度ベクトルを
【0015】
【数2】
【0016】
とする。
【0017】
また、図2において、20は目標の回転を表す角速度ベクトル
【0018】
【数3】
【0019】
を表す。一般に、船舶や航空機などの目標が等角速度運動を続けることはないが、短い時間の間、近似的に等角速度運動をしているとみなすことは可能である。また、図2において、21は孤立反射点Pkの速度を表すベクトル
【0020】
【数4】
【0021】
である。目標上の孤立反射点は全て同じ角速度で運動するため、各孤立反射点の速度
【0022】
【数5】
【0023】
は、次式で表される。
【0024】
【数6】
【0025】
また、図2に示すとおり、目標回転軸上の任意の点Oを原点とする直交座標系x、y、z座標を定義する。x、y、z座標の軸の向きは任意であるが、例えばx、y平面が水平面を表し、zが鉛直方向上向きを表すと考えて良い。
【0026】
なお、本明細書において、
【0027】
【数7】
【0028】
のように上線のついた変数は空間内のベクトルを表し、
【0029】
【数8】
【0030】
は変数xの時間微分を表す。また、
【0031】
【数9】
【0032】
のように二重上線のついた変数は行列を表し、
【0033】
【数10】
【0034】
のように
【0035】
【数11】
【0036】
記号のついた変数は長さが1の単位ベクトルを表す。
【0037】
図2において、3、4、5はそれぞれ送受信アンテナと受信用補助アンテナの位置を表している。また、送受信アンテナ3、受信用補助アンテナ4、受信用補助アンテナ5の位置ベクトルを、それぞれ、
【0038】
【数12】
【0039】
とする。さらに、送受信アンテナ3からそれぞれ受信用補助アンテナ4と受信用補助アンテナ5へ向かうベクトルを基線ベクトルと呼び、次式で定義する。
【0040】
【数13】
【0041】
また、図2において、22は、送受信アンテナ3から原点に向かう方向(レーダの視線方向と一致するものとする)を表す単位ベクトルであり、次式で定義される。
【0042】
【数14】
【0043】
なお、以下では、送受信アンテナ3から目標までの距離
【0044】
【数15】
【0045】
が、基線ベクトルの長さと目標のサイズに対して十分に長いものとする。
【0046】
【数16】
【0047】
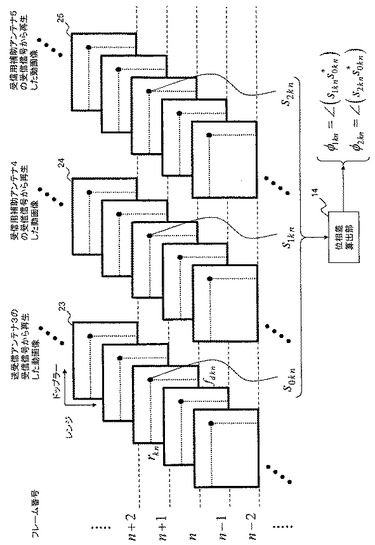
観測において、送受信アンテナ3は、繰り返し周期(PRI:Pulse Repetition Interval)tpriで広帯域パルスの送受信を繰り返す。また、送受信アンテナ3と同時に受信用補助アンテナ4および受信用補助アンテナ5においても信号を受信する。すると、各アンテナで受信された信号を用いてそれぞれISARの動画像を再生することができる。
【0048】
図3は、各アンテナで受信された信号を用いて得られるISAR動画像の概念図である。図3において、23、24、25は送受信アンテナ3、受信用補助アンテナ4、受信用補助アンテナ5の受信信号を用いてそれぞれ再生されたISAR動画像である。ISAR動画像の1枚目のフレームは、1パルス目からHパルス目のデータを用いて生成され、2フレーム目は1+Jパルス目からH+Jパルス目を用いて生成されるものとする。3フレーム目以降も同様で、結局、nフレーム目は1+(n−1)Jパルス目からH+(n−1)Jパルス目のデータを用いて生成される。このとき、動画像のフレーム間の時間間隔tfrは次式で表される。
【0049】
【数17】
【0050】
また、目標の運動および3次元形状を推定するのに用いる動画像のフレーム数をNとすると、全体の観測に必要な送信パルス数はH+(N−1)Jパルスであり、観測時間は{H+(N−1)J}tpriである。
【0051】
上記の観測およびISAR処理の結果、動画像23、24、25のn番目のフレームにおいて、孤立反射点Pkに対応する輝点が現れるものとする。すると、このフレームにおける輝点の座標の読み取り値から孤立反射点Pkのレーダの視線方向の位置rknとドップラー周波数fdkn、および輝点のピーク複素振幅s0kn、s1kn、s2knが観測される(図3参照)。ここで、厳密には各アンテナから孤立反射点Pkまでの距離や、各アンテナで観測されるドップラー周波数は異なるが、式(5)の条件より、rknとfdknは送受信アンテナ3における観測量で代表できるものとする。
【0052】
以下では、これらの観測量と、求めたい未知パラメータ
【0053】
【数18】
【0054】
および
【0055】
【数19】
【0056】
との関係を導く。まず、rknとfdknは次式の関係を満たす。
【0057】
【数20】
【0058】
ただし、ISAR画像上におけるレンジ方向の原点の位置は、空間内に定義した原点Oであるとして定義した。なお、孤立反射点の位置
【0059】
【数21】
【0060】
は当然時変であるが、以下ではn番目のフレームの観測時(より具体的には、
【0061】
【数22】
【0062】
パルス目の送受信時;ただし,
【0063】
【数23】
【0064】
は小数点以下の切り捨てを表す)における位置を
【0065】
【数24】
【0066】
と考える。
【0067】
次に、ピーク複素振幅s0kn、s1kn、s2knについては、これらの観測値の間の位相差と
【0068】
【数25】
【0069】
が次式の関係を満たす。
【0070】
【数26】
【0071】
なお、式(9)と式(10)は、アレイアンテナを用いて遠方からの到来波を受信する際に、その到来角度によって決まるアレイ素子間の位相差の式に他ならない。目標の回転に伴い、
【0072】
【数27】
【0073】
が変化するため、φ1kn、φ2knは変化するが、短い時間の間ではその変化はほぼ線形とみなすことができ、その変化率は次式で表される。
【0074】
【数28】
【0075】
ここで、式(11)、式(12)の導出には以下の関係および近似を用いた。
【0076】
【数29】
【0077】
なお、
【0078】
【数30】
【0079】
のとき、送受信アンテナ3から各孤立反射点への方向はほぼ平行であるため、次式の近似が成り立つ。
【0080】
【数31】
【0081】
また、位相差の変化率
【0082】
【数32】
【0083】
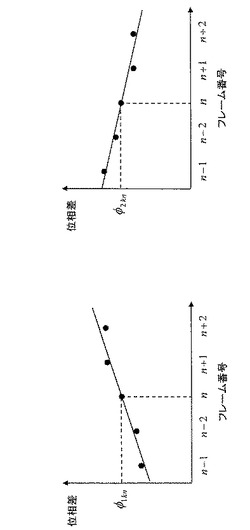
は、n番目のフレームの前後のNフレームにおける位相差の値
【0084】
【数33】
【0085】
を用い、式(15)、(16)で表される最小二乗法による直線あてはめによって推定できる。
【0086】
【数34】
【0087】
なお、ここで、
【0088】
【数35】
【0089】
は小数点以下の切り捨て、
【0090】
【数36】
【0091】
は小数点以下の切り上げをそれぞれ表す。
【0092】
図4は、観測された位相差の値に直線を当てはめて式(15)、(16)に示す位相差の変化率を求める概念図である。
【0093】
原理的には、上記で導いた式(1)、(7)、(8)、(11)、(12)の関係を用いて、目標の運動および三次元形状を推定することが可能である。以下では、図1を用いて、この発明の実施の形態1に係る画像レーダ装置の機能構成および動作について説明する。
【0094】
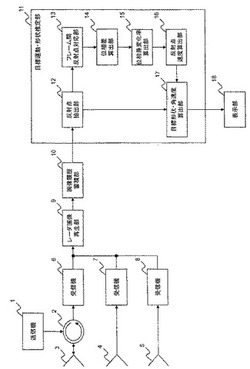
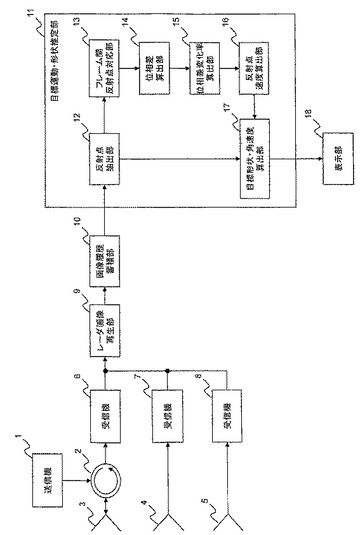
図1に示す画像レーダ装置は、送信機1、送受切換器2、送受信アンテナ3、受信用補助アンテナ4及び5、受信機6〜8、レーダ画像生成部9、画像履歴蓄積部10、目標運動・形状推定部11及び表示部18を備えている。ここで、目標運動・形状推定部11は、反射点抽出部12、フレーム間反射点対応部13、位相差算出部14、位相差変異算出部15、反射点速度算出部16、目標形状・角速度算出部17を有し、目標形状・角速度算出部17で算出された結果は表示部18で表示される。
【0095】
送信機1は、周知の発振器および変調器などを含み、送受切換器2および受信機6〜8とともに、送受信制御部(図示せず)の制御下で駆動される。送受信アンテナ3は、目標に向けて送信パルスを出射するとともに、送信パルスが目標で反射されて戻ってくる反射電波を受信電波として受信する。このとき、受信用補助アンテナ4と5も同時に該反射電波を受信電波として受信する。
【0096】
受信機6〜8は、それぞれ送受信アンテナ3および受信用補助アンテナ4、5で受信された電波を増幅、検波して得られた受信信号をレーダ画像再生部9に送る。そして、前述の通り、本実施の形態1に係る画像レーダ装置においては、以上のようなパルスの送受信を繰返し周期tpriで繰り返す。
【0097】
レーダ画像再生部9では、前述の通り、それぞれ送受信アンテナ3、受信用補助アンテナ4、受信用補助アンテナ5の受信信号を用いてISAR動画像23、24、25を再生する。ここで、nフレーム目を再生するためには1+(n−1)Jパルス目からH+(n−1)Jパルス目のデータを用いる。
【0098】
画像履歴蓄積部10では、レーダ画像再生部9で再生された動画像23、24、25をメモリに蓄積する。目標運動・形状推定部11は、画像履歴蓄積部10に一旦格納された動画像23、24、25の情報を利用して、目標の運動と形状を推定して、推定結果の形状を表示部18に出力する。
【0099】
以下では、目標運動・形状推定部11の構成と動作を説明する。まず、反射点抽出部12では、動画像の各フレームにおいて、輝点(輝度の強い点)を検出し、その位置と複素振幅を計測する。輝点の検出には一般に良く知られたCFAR(Constant False Alarm Rate)処理などを用いればよい。以下では、反射点抽出部12において、動画像の各フレームにおいてK点ずつの点目標が検出されたと仮定して説明を進める。反射点抽出部12は、検出処理の結果として、K点の点目標について、レーダの視線方向の位置rknとドップラー周波数fdkn、および輝点のピーク複素振幅s0kn、s1kn、s2knを出力する(k=1,2,・・・,K)。
【0100】
フレーム間反射点対応部13では、各フレームで検出された輝点同士を対応付ける。ここでは、レーダの目標追尾などに利用される追尾方式などを利用して対応付けを行う。反射点抽出部12の出力結果において、n+1フレーム目におけるk番目の輝点の信号と、nフレーム目におけるk番目の輝点の信号が、同じ孤立反射点からの信号に対応しているとは限らない。フレーム間反射点対応部13における対応付け処理(追尾処理)によって、フレーム間での輝点の対応付けがなされ、その結果、同じ孤立反射点Pkの信号が全てのフレームにおいて、k番目の信号としてラベル付けされる。
【0101】
なお、反射点抽出部12において、全てのフレームにおいて点目標が必ずK点検出されるとは限らない。例えば、n番目のフレームにおいてK点検出されていて、n+1番目のフレームにおいてK−1点しか検出されなければ、n番目で検出された輝点のうち一つは、n+1番目のフレームで検出された輝点と対応付けられないことになる。このような場合は、フレーム間反射点対応部13において対応付けできない旨を判定して記録する。
【0102】
次いで、位相差算出部14では、送受信アンテナ3と、受信用補助アンテナ4,5で得られた信号の位相差を、各フレーム、各検出信号に対して次式によって算出する。
【0103】
【数37】
【0104】
次に、位相差変化率算出部15は、各フレーム、各検出信号に対して次式に示す位相差の変化率を算出する。
【0105】
【数38】
【0106】
なお、位相差変化率算出部15における上記の最小二乗法による変化率の算出の代わりに、各輝点の反射強度(反射電力や振幅など)で重み付けを行い、重み付け最小二乗法によって変化率を算出しても良い。重み付けをすることによって、SNR(Signal to Noise Ratio)の高い信号の情報をより重視することが出来、位相差変化率の推定精度を向上することが可能である。
【0107】
次に、反射点速度算出部16は、各孤立反射点の速度
【0108】
【数39】
【0109】
を求める。反射点速度算出部16の処理を説明するために、まず、式(8)、(11)、(12)を整理してまとめると次式を得る。
【0110】
【数40】
【0111】
ただし、上付きのTは行列の転置を表す。ここで、行列
【0112】
【数41】
【0113】
を構成する要素は、レーダの視線方向ベクトル
【0114】
【数42】
【0115】
と基線ベクトル
【0116】
【数43】
【0117】
であり、これらは既知であると考えることができる。また、左辺を構成する要素はレンジrkn、ドップラー周波数fdknと位相差の変化率
【0118】
【数44】
【0119】
であるが、レンジrkn、ドップラー周波数fdknは、反射点抽出部12の出力(ただし、フレーム間反射点対応部13によってラベル付けされたもの)として得られており、位相差の変化率
【0120】
【数45】
【0121】
は位相差変化率算出部15の出力として得られている。さらに、原点までの距離r0と波長λも含まれるが、これらは既知の値として扱うことができる。
【0122】
以上より、反射点速度算出部16は、各孤立反射点の速度
【0123】
【数46】
【0124】
を次式によって求める。
【0125】
【数47】
【0126】
目標形状・角速度算出部17は、角速度
【0127】
【数48】
【0128】
および各孤立反射点の位置
【0129】
【数49】
【0130】
を算出する。以下に、式(1)、(7)を再度示す。
【0131】
【数50】
【0132】
これらの方程式の左辺において、
【0133】
【数51】
【0134】
は式(18)で得られており、rknは観測値である。また、これらの方程式はK個の孤立反射点についてそれぞれ成り立つので、得られる方程式の数は3K+K本である。一方、未知のパラメータは
【0135】
【数52】
【0136】
と
【0137】
【数53】
【0138】
であり、未知変数の数は3+3K個である。したがって、連立方程式が解を持つための必要条件は、次式で表される。
【0139】
【数54】
【0140】
すなわち、目標上に孤立反射点が3点以上存在して、それが観測できることが条件である。一般に、レーダの観測対象となる目標を構成する孤立反射点の数は3つ以上であるから、この条件は概して成立すると考えてよい。
【0141】
以上を踏まえ、目標形状・角速度算出部17は、式(19)、(20)の連立方程式を解くことによって、角速度
【0142】
【数55】
【0143】
および各孤立反射点の位置
【0144】
【数56】
【0145】
を算出する。なお、K>3の場合は最小二乗法によって解を求める。また、ここでも、位相差変化率算出部15の場合と同様に、各輝点の強度によって重み付けをした重み付け最小二乗法を用いて解を求めても良い。重み付けをすることによって、SNRの高い信号の情報を重視するために、角速度の推定精度および目標形状の推定精度を向上することが可能である。
【0146】
最後に、目標形状・角速度算出部17において算出された孤立反射点の位置
【0147】
【数57】
【0148】
は表示部18に送られ、表示部18は推定された目標の三次元形状を表示する。
【0149】
ところで、反射点速度算出部16の処理において、
【0150】
【数58】
【0151】
の逆行列が存在する条件は、次式で表される。
【0152】
【数59】
【0153】
すなわち、2つの基線ベクトルが互いに平行でなく、かつ、レーダの視線ベクトルが2つの基線ベクトルの張る平面に直交する成分を持っていることが条件となる。したがって、受信用補助アンテナ4、5は上記の条件を満たすように配置する必要がある。なお、受信用補助アンテナ4、5は2つの基線ベクトルが直交するように配置するのが望ましい。
【0154】
また、目標形状・角速度算出部17において、連立方程式(19)、(20)が線形独立である条件は、次式で表される。
【0155】
【数60】
【0156】
つまり、目標の回転軸がレーダの視線方向と一致しないこと、および回転軸がレーダの視線方向と直交しないことを示している。この条件が成立するためには、目標の運動が既知である必要があるため、条件によっては目標の三次元形状が推定できない場合があることを示唆する。この問題に対する対策は実施の形態3に述べる。
【0157】
以上のように、この発明の実施の形態1によれば、送受信アンテナ3に加えて受信用補助アンテナ4、5を具備し、各アンテナに接続された受信機6〜8で受信した信号を用いてそれぞれISAR動画像を生成することにより、これらのISAR動画像から観測された視線方向の位置およびドップラー周波数に加えて、観測信号の位相差の情報を利用できるように構成したので、レーダの観測信号を用いることで、目標の運動と三次元形状を同時に推定することが可能となる効果を奏する。
【0158】
なお、以上においては、受信用補助アンテナの数は2つに限定して説明していたが、2つ以上ある場合も、同様の原理によって、実施が可能である。
【0159】
実施の形態2.
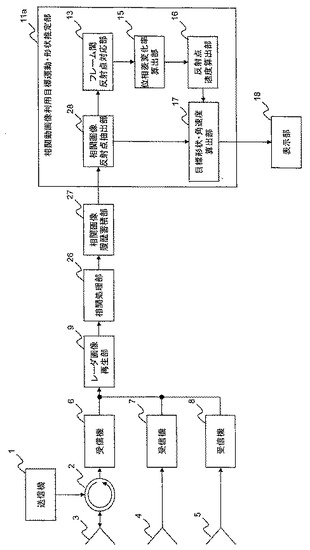
図5は、この発明の実施の形態2に係る画像レーダ装置の機能構成を示すブロック図である。図5において、新たな符号として、26は相関処理部、11aは相関動画像利用目標運動・形状推定部、27は相関画像履歴蓄積部、28は相関画像反射点抽出部であり、その他は図1と同様である。
【0160】
ISAR動画像23、24、25の各フレームの画素数をレンジ軸方向にI個、ドップラー軸方向にJ個とする。動画像23、24、25の(i,j)における画素の観測値をそれぞれs0n(i,j)、s1n(i,j)、s2n(i,j)とすると、相関処理部26では、動画像23と動画像24の相関および動画像23と動画像25の相関を次式によって算出する。
【0161】
【数61】
【0162】
ここで、算出されたc10n(i,j)とc20n(i,j)を、以下では相関動画像と呼ぶ。式(21)、(22)では、簡単のため、画素単位で複素共役を掛け合わせる処理のみを記してあるが、相関処理部26では、相関を計算する画像のうち一方をサブピクセル単位でずらしながら、画素毎の相関値の二乗和が最大となるような計算をして、2つの画像の位置あわせを実施するように構成しても良い。このようにすることによって、送受信アンテナ3および受信用補助アンテナ4,5で観測された動画像23、24、25の位置あわせを実施することが出来る。相関処理部26によって算出されたこれらの相関動画像は、相関画像履歴蓄積部27に送られてメモリに一旦格納される。
【0163】
相関画像反射点抽出部28は、相関動画像の中から、振幅あるいは電力値の大きい輝点を検出する。ここでの処理は、反射点抽出部12と同様にCFAR処理などによって実現できる。相関画像反射点抽出部28は検出処理の結果として、K点の点目標について、レーダの視線方向の位置rknとドップラー周波数fdkn、および輝点のピーク位置における位相差φ1kn,φ2knを出力する(k=1,2,・・・,K)。
【0164】
以下の動作は実施の形態1と同様であるが、相関画像反射点抽出部28においてすでに位相差が算出されているので、実施の形態1で必要であった位相差算出部14は不要となる。
【0165】
以上のように、この発明の実施の形態2によれば、送受信アンテナ3と受信用補助アンテナ4,5に接続された受信機で受信した信号を用いてそれぞれISAR動画像を生成し、最初にこれらのISAR動画像のフレーム毎に相関動画像を算出する際にサブピクセル単位で画像間の位置あわせを実施するため、位相差の推定精度が向上し、ひいては目標運動及び形状の推定精度を向上できる効果を奏する。
【0166】
実施の形態3.
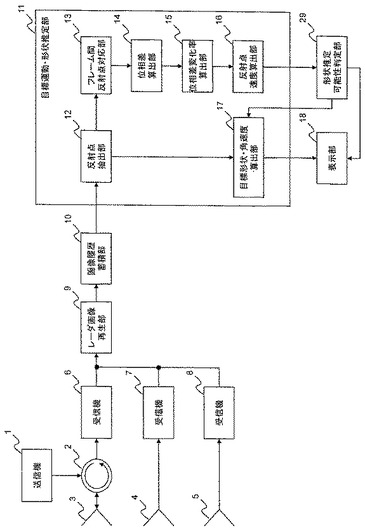
図6は、この発明の実施の形態3に係る画像レーダ装置の機能構成を示すブロック図である。図6において、新たな符号として、29は形状推定可能性判定部であり、その他は図1と同様である。
【0167】
式(23)に示したとおり、目標の回転軸がレーダの視線方向と一致する場合、または、回転軸がレーダの視線方向と直交する場合、目標形状・角速度推定部17においては、連立方程式の線形独立性がくずれるため、孤立反射点の位置ベクトル
【0168】
【数62】
【0169】
及び角速度
【0170】
【数63】
【0171】
を算出することができない。そこで、形状推定可能性判定部29では、反射点速度算出部16で算出された孤立反射点の速度ベクトル
【0172】
【数64】
【0173】
を用いて、まず、回転軸の向きを推定する。
【0174】
図2のジオメトリからも明らかなように、孤立反射点の速度ベクトル
【0175】
【数65】
【0176】
は回転軸と直交する関係にある。したがって、形状推定可能性判定部29においては、反射点速度算出部16で算出された孤立反射点の速度ベクトル
【0177】
【数66】
【0178】
の全てに直交するベクトルを算出することで、回転軸の向きを算出する。ただし、一般的には、速度ベクトル
【0179】
【数67】
【0180】
の推定量には誤差分が含まれているため、速度ベクトル
【0181】
【数68】
【0182】
の全てに直交するベクトルは存在しない場合がある。
【0183】
このような場合にも対応するため、例えば、形状推定可能性判定部29では、以下のような方法で回転軸を推定する。まず、次式によって、速度ベクトル
【0184】
【数69】
【0185】
の共分散行列
【0186】
【数70】
【0187】
を算出する。
【0188】
【数71】
【0189】
次に、この共分散行列
【0190】
【数72】
【0191】
の固有値分解を実施し、最小固有値に対応する固有ベクトル
【0192】
【数73】
【0193】
を得る。この最小固有値に対応する固有ベクトルの向きを回転軸とする。なお、反射点速度算出部16で算出された孤立反射点の速度ベクトル
【0194】
【数74】
【0195】
が誤差を持たなければ、最小固有値の値は0となる。
【0196】
次いで、最小固有値に対応する固有ベクトル
【0197】
【数75】
【0198】
と視線方向ベクトル
【0199】
【数76】
【0200】
を比較する。この2つのベクトルが、平行でもなく、直交もしていなければ、目標形状・角速度算出部17において、孤立反射点の位置ベクトル
【0201】
【数77】
【0202】
及び角速度
【0203】
【数78】
【0204】
を算出する。一方、この2つのベクトルが平行であるか、あるいは直交している場合については、表示部18にその旨を出力し、表示部18においては、現在の位置関係では目標形状を正しく推定できないことをオペレータに伝える。画像レーダ装置が例えばヘリコプタなどの移動体に装備されている場合、オペレータは、この情報に基づいて画像レーダ装置を搭載した移動体の位置を移動させ、再度観測をやり直すことにより、目標の運動及び三次元形状を推定する。
【0205】
以上のように、この発明の実施の形態3によれば、形状推定可能性判定部29を備えるように構成したので、目標の孤立反射点の速度を推定した後に、形状推定の可能性を判定し、可能であれば形状推定を実施し、不可能であれば、プラットフォームを移動することで、形状推定を可能とする効果を奏する。
【0206】
実施の形態4.
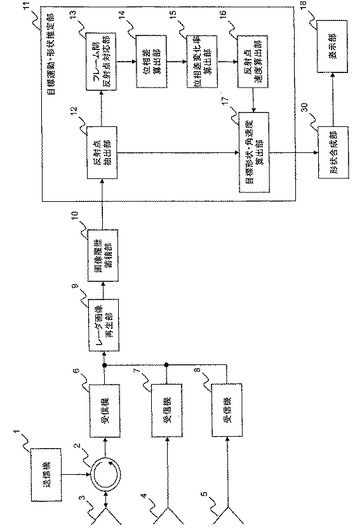
図7は、この発明の実施の形態4に係る画像レーダ装置の機能構成を示すブロック図である。図7において、新たな符号として、30は形状合成部であり、その他は図1と同様である。
【0207】
実施の形態1乃至3においては、ISAR動画像のうちN個のフレームの情報を用いて目標運動及び形状を推定していた。しかし、ISAR動画像は連続的に観測し続けることが可能であるため、連続するN個のフレームを用いて、目標形状を次々と繰り返し推定することが可能である。形状合成部30では、これらの連続して推定された形状を合成して、より精度のよい形状推定結果を得る。
【0208】
形状合成部30は、例えば、連続して得られた推定結果を単に重畳するように構成することが出来る。特に、目標形状が複雑で、一方向からの観測だけでは遮蔽の影響により全体の形状が推定できないような場合、長時間の観測により複数の方向から観測された信号を元に推定された結果を重畳して表示することができ、より正確な三次元形状を得ることが可能となる。
【0209】
または、形状合成部30は、個々の推定結果の平均処理をするような形で、推定精度を向上するように構成しても良い。
【0210】
以上のように、この発明の実施の形態4によれば、形状合成部30を備えるように構成したので、複数回の形状推定結果を合成することができる。そのため、形状推定精度が向上したり、複数の角度から観測された形状を重畳することで、遮蔽の影響を低減する効果を奏する。
【0211】
実施の形態5.
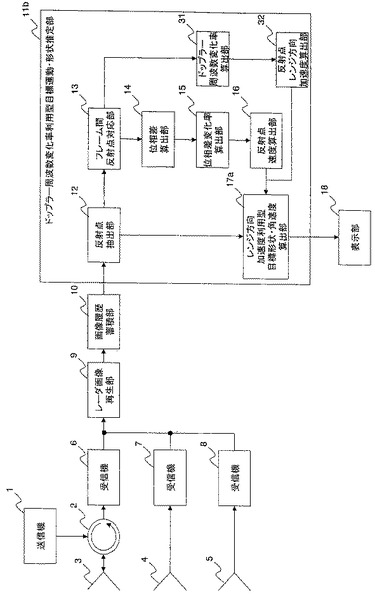
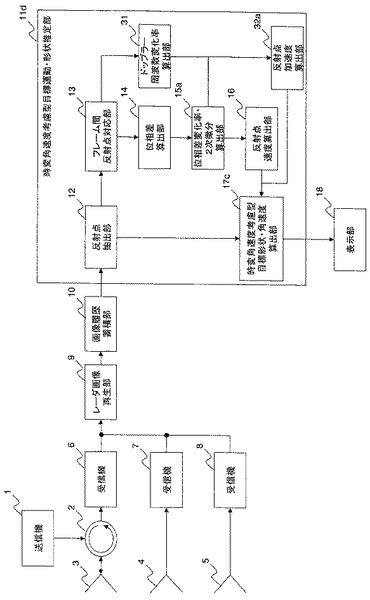
図8は、この発明の実施の形態5に係る画像レーダ装置の機能構成を示すブロック図である。図8において、新たな符号として、11bはドップラー周波数変化率利用型目標運動・形状推定部、17aはレンジ方向加速度利用型目標形状・角速度算出部、31はドップラー周波数変化率算出部、32は反射点レンジ方向加速度算出部であり、その他は図1と同様である。
【0212】
また、図9と図10は、この発明の実施の形態5に係る画像レーダ装置の動作を説明するための説明図である。
【0213】
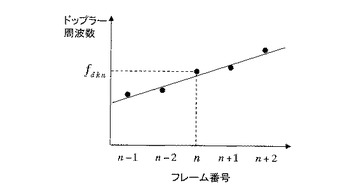
実施の形態1乃至4の目標運動・形状推定部11および相関動画像利用目標運動・形状推定部11aの処理において、ドップラー周波数についてはn番目のフレームにおけるドップラー周波数fdknの情報のみを利用していた。しかし、一般に孤立反射点のドップラー周波数の値は、図9に示すように時間と共に変化する。したがって、ドップラー周波数の変化率の情報も用いたほうが目標形状の推定精度を向上できることが期待される。そこで、ドップラー周波数変化率利用型目標運動・形状推定部11bでは、目標形状および角速度の推定に、ドップラー周波数の変化率
【0214】
【数79】
【0215】
の情報も用いる。
【0216】
以下では、まず、レンジ方向加速度利用型目標形状・角速度算出部17aの動作を説明するため、ドップラー周波数の変化率
【0217】
【数80】
【0218】
が得られたと仮定した場合の形状推定方式について説明し、ドップラー周波数の変化率
【0219】
【数81】
【0220】
の推定方式については後述する。
【0221】
ドップラー周波数の変化率
【0222】
【数82】
【0223】
を観測すると、孤立反射点Pkのレンジ方向の速度の変化率
【0224】
【数83】
【0225】
が次式によって求められる。
【0226】
【数84】
【0227】
一方で、レンジ方向の速度の変化率
【0228】
【数85】
【0229】
と孤立反射点の位置
【0230】
【数86】
【0231】
は、次式の関係を満たす。
【0232】
【数87】
【0233】
なお、ここでは、実施の形態1乃至4と同様に目標が等角速度運動をしていることを前提とし、その角速度ベクトルの変化率はゼロとした。
【0234】
【数88】
【0235】
このように、ドップラー周波数の変化率
【0236】
【数89】
【0237】
から求められたレンジ方向の速度の変化率
【0238】
【数90】
【0239】
は、孤立反射点の位置
【0240】
【数91】
【0241】
と式(24)の関係を満たすので、この関係を目標形状の推定に利用することが出来る。具体的には、式(19)、(20)および式(24)の連立方程式を解くことによって、各孤立反射点の位置
【0242】
【数92】
【0243】
を算出できる。なお、式(19)、(20)および(24)の連立方程式をベクトル表現すると次式で表される。
【0244】
【数93】
【0245】
ここで、上付きのTはベクトルおよび行列の転置を表す。また、
【0246】
【数94】
【0247】
であり、
【0248】
【数95】
【0249】
としたとき、行列
【0250】
【数96】
【0251】
は次式によって定義される。
【0252】
【数97】
【0253】
なお、式(26)において、各孤立反射点の速度については、n番目のフレーム観測時における速度であることを明示するため、
【0254】
【数98】
【0255】
と表記している。
【0256】
以上を踏まえ、レンジ方向加速度利用型目標形状・角速度算出部17aは、式(26)の連立方程式を非線形の最小二乗法で解くことによって、角速度
【0257】
【数99】
【0258】
および各孤立反射点の位置
【0259】
【数100】
【0260】
を算出する。
【0261】
式(26)の解法については如何なる方法を用いてもかまわないが、角速度
【0262】
【数101】
【0263】
について、その向きを表す単位ベクトル
【0264】
【数102】
【0265】
と角速度の大きさを表す
【0266】
【数103】
【0267】
を分離して推定することによって、式(26)をより効率良く解くことが可能となる。
【0268】
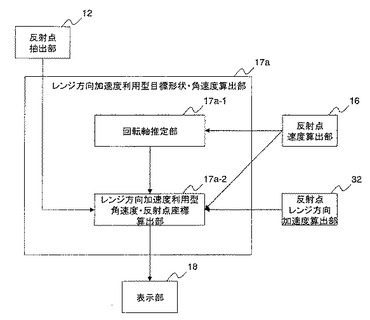
図10は、この考え方に基づいてレンジ方向加速度利用型目標形状・角速度算出部17aを構成した場合の構成図である。図10において、新たな符号として、17a−1は回転軸推定部、17a−2はレンジ方向加速度利用型角速度・反射点座標算出部であり、その他は図8と同様である。
【0269】
回転軸推定部17a−1においては、実施の形態3に示した形状推定可能性判定部29と同様に、反射点速度算出部16で算出された孤立反射点の速度ベクトル
【0270】
【数104】
【0271】
を用いて、回転軸の向きを推定する。すなわち、まず、次式によって、速度ベクトル
【0272】
【数105】
【0273】
の共分散行列
【0274】
【数106】
【0275】
を算出する。
【0276】
【数107】
【0277】
次に、この共分散行列
【0278】
【数108】
【0279】
の固有値分解を実施し、最小固有値に対応する固有ベクトル
【0280】
【数109】
【0281】
を得る。この最小固有値に対応する固有ベクトルの向きを回転軸とみなし、角速度
【0282】
【数110】
【0283】
の向きを表す単位ベクトル
【0284】
【数111】
【0285】
の推定値を
【0286】
【数112】
【0287】
で与える。
【0288】
次いで、レンジ方向加速度利用型角速度・反射点座標算出部17a−2においては、
【0289】
【数113】
【0290】
の値を一つ仮定して、行列
【0291】
【数114】
【0292】
を与えた上で、式(26)を次の線形最小二乗法によって解く。
【0293】
【数115】
【0294】
このとき、孤立反射点の座標
【0295】
【数116】
【0296】
の推定値は仮定した
【0297】
【数117】
【0298】
の値の関数であるから、
【0299】
【数118】
【0300】
と表記している。また、式(29)の最小二乗法による解における二乗誤差は次式で表される。
【0301】
【数119】
【0302】
次いで、レンジ方向加速度利用型角速度・反射点座標算出部17a−2においては、
【0303】
【数120】
【0304】
の値をとりうる値の範囲で様々に仮定して、式(29)を解く。その上で、二乗誤差
【0305】
【数121】
【0306】
を最小にする
【0307】
【数122】
【0308】
と、そのときの孤立反射点の座標の推定値
【0309】
【数123】
【0310】
を最終的な推定値として出力する。このように構成することにより、解の探索は回転の速さ
【0311】
【数124】
【0312】
についてのみ実施すればよく、その他は線形最小二乗法によって求めることが可能である。
【0313】
以上においては、ドップラー周波数の変化率
【0314】
【数125】
【0315】
が得られたものと仮定して議論を進めたが、ドップラー周波数の変化率
【0316】
【数126】
【0317】
は、実施の形態1における位相差変化率算出部15の動作と同様に、n番目のフレームの前後のNフレームにおけるドップラー周波数の値
【0318】
【数127】
【0319】
から推定することが可能である。すなわち、ドップラー周波数変化率算出部31は、次式によってドップラー周波数の変化率
【0320】
【数128】
【0321】
を推定する。これはすなわち、図9に示すようにn番目のフレームの前後のNフレームにおけるドップラー周波数の観測値に当てはめた直線の傾きに相当する。
【0322】
【数129】
【0323】
ここで、
【0324】
【数130】
【0325】
はドップラー周波数の変化率の推定値を表す。なお、ドップラー周波数変化率算出部31における上記の最小二乗法による変化率の算出の代わりに、各輝点の反射強度(反射電力や振幅など)で重み付けを行い、重み付け最小二乗法によって変化率を算出しても良い。重み付けをすることによって、SNR(Signal to Noise Ratio)の高い信号の情報をより重視することが出来、ドップラー周波数変化率の推定精度を向上することが可能である。
【0326】
ドップラー周波数変化率算出部31においてドップラー周波数の変化率の推定値
【0327】
【数131】
【0328】
が算出された後は、反射点レンジ方向加速度算出部32において式(23)によりレンジ方向の加速度が算出される。
【0329】
以上のように、この発明の実施の形態5によれば、ドップラー周波数変化率算出部31および反射点レンジ方向加速度算出部32を備え、さらに、レンジ方向加速度利用型目標形状・角速度算出部17aを備えるように構成したので、孤立反射点のレンジ方向の位置および孤立反射点の速度に加えて、レンジ方向の加速度の情報も用いることができるようになり、目標形状の推定精度を向上する効果を奏する。
【0330】
また、レンジ方向加速度利用型目標形状・角速度算出部17aが、回転軸推定部17a−1と、レンジ方向加速度利用型角速度・反射点座標算出部17a−2を備えるように構成したので、目標の角速度と孤立反射点の座標の推定に用いる非線形最小二乗問題を効率良く解くことができる効果を奏する。
【0331】
実施の形態6.
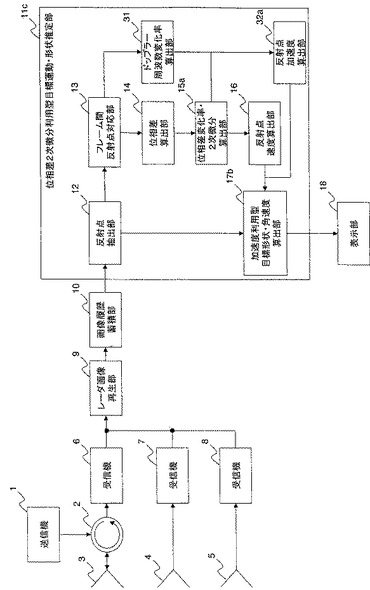
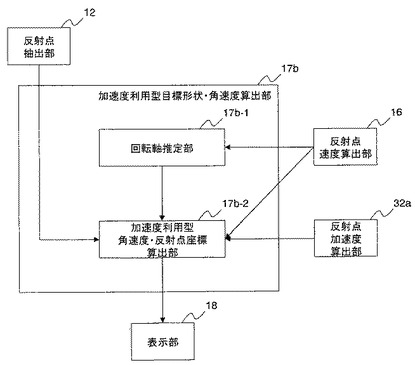
図11は、この発明の実施の形態6に係る画像レーダ装置の機能構成を示すブロック図である。図11において、新たな符号として、11cは位相差2次微分利用型目標運動・形状推定部、15aは位相差変化率・2次微分算出部、17bは加速度利用型目標形状・角速度算出部、32aは反射点加速度算出部であり、その他は図8と同様である。
【0332】
また、図12と図13は、この発明の実施の形態6に係る画像レーダ装置の動作を説明するための説明図である。
【0333】
実施の形態5のレンジ方向加速度利用型目標形状・角速度算出部17aでは、目標形状および角速度の推定に、ドップラー周波数の変化率の推定値から求められるレンジ方向の加速度の情報を利用している。しかし、一般に孤立反射点の加速度はレンジ方向のみならず、レンジに直交する成分も有している。したがって、加速度のレンジ方向に直交する成分を用いることができれば、目標形状の推定精度を向上できると期待される。
【0334】
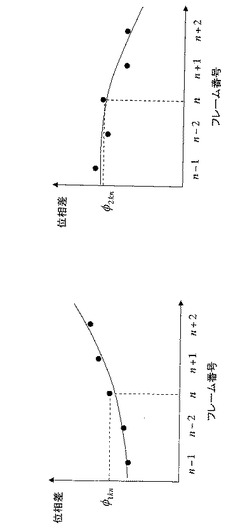
本実施の形態6に係る画像レーダ装置においては、位相差の2次微分成分の推定値から加速度のレンジ方向に直交する成分を推定する。まず、位相差変化率・2次微分算出部15aにおいては、図12に示すように位相差の観測値に最小二乗法によって2次の曲線を当てはめることによって、位相差の変化率と2次微分成分を算出する。すなわち、nフレーム目における位相差、位相差の変化率、位相差の2次微分を次式によって推定する。
【0335】
【数132】
【0336】
ここで、
【0337】
【数133】
【0338】
はそれぞれ、送受信アンテナ3と受信用補助アンテナ4で得られた信号のn番目のフレームにおける位相差、位相差の変化率、位相差の2次微分の推定値を表す。また、
【0339】
【数134】
【0340】
はそれぞれ、送受信アンテナ3と受信用補助アンテナ5で得られた信号のn番目のフレームにおける位相差、位相差の変化率、位相差の2次微分の推定値を表す。位相差変化率・2次微分算出部15aは、以上によって算出された
【0341】
【数135】
【0342】
を出力する。
【0343】
次いで、反射点加速度算出部32aは、ドップラー周波数変化率算出部31によって算出されたドップラー周波数の変化率の推定値
【0344】
【数136】
【0345】
と位相差変化率・2次微分算出部15aにおいて算出された位相差、位相差の変化率、位相差の2次微分の推定値
【0346】
【数137】
【0347】
を利用して、孤立反射点の加速度を算出する。
【0348】
ここで、位相差の2次微分と加速度の関係は次式で表される。
【0349】
【数138】
【0350】
ただし、式(34)、式(35)の導出には以下の関係および近似を用いた。
【0351】
【数139】
【0352】
観測対象の目標のサイズに対して十分に遠方から観測していることを想定しているため、
【0353】
【数140】
としている。なお、
【0354】
【数141】
【0355】
のとき、送受信アンテナ3から各孤立反射点への方向はほぼ平行であるため、次式の近似が成り立つ。
【0356】
【数142】
【0357】
反射点加速度算出部32aは、式(34)、(35)および(23)より、反射点の加速度を算出する。まず、式(34)、(35)および(23)を整理してベクトル表現で表すと次式で表される。
【0358】
【数143】
【0359】
したがって、加速度
【0360】
【数144】
【0361】
は次式によって算出できる。
【0362】
【数145】
【0363】
反射点加速度算出部32aは、式(39)によって算出された加速度
【0364】
【数146】
【0365】
を出力する。
【0366】
次いで、加速度利用型目標形状・角速度算出部17bは、実施の形態5におけるレンジ方向加速度利用型目標形状・角速度算出部17aと同様の操作により、角速度
【0367】
【数147】
【0368】
および各孤立反射点の位置
【0369】
【数148】
【0370】
を算出する。
【0371】
まず、加速度
【0372】
【数149】
【0373】
と孤立反射点の位置
【0374】
【数150】
【0375】
の関係を次式に示す。
【0376】
【数151】
【0377】
なお、ここでは、実施の形態5と同様に目標が等角速度運動をしていることを前提とし、その角速度ベクトルの変化率はゼロとした。
【0378】
このように、加速度
【0379】
【数152】
【0380】
は、孤立反射点の位置
【0381】
【数153】
【0382】
と式(40)の関係を満たすので、この関係を目標形状の推定に利用することが出来る。具体的には、式(19)、(20)および(40)の連立方程式を解くことによって、各孤立反射点の位置
【0383】
【数154】
【0384】
を算出できる。なお、式(19)、(20)および(40)の連立方程式をベクトル表現すると次式で表される。
【0385】
【数155】
【0386】
ここで、行列
【0387】
【数156】
【0388】
は式(27)によって定義されるものである。
【0389】
以上を踏まえ、加速度利用型目標形状・角速度算出部17bは、式(41)の連立方程式を非線形の最小二乗法で解くことによって、角速度
【0390】
【数157】
【0391】
および各孤立反射点の位置
【0392】
【数158】
【0393】
を算出する。なお、実施の形態5で示したレンジ方向加速度利用型目標形状・角速度算出部17aと同様に、角速度
【0394】
【数159】
【0395】
について、その向きを表す単位ベクトル
【0396】
【数160】
【0397】
と回転の速さを表す
【0398】
【数161】
【0399】
を分離して推定することによって、式(41)をより効率良く解くことが可能である。
【0400】
図13は、この考え方に基づいて加速度利用型目標形状・角速度算出部17bを構成した場合の構成図である。図13において、新たな符号として、17b−1は回転軸推定部、17b−2は加速度利用型角速度・反射点座標算出部であり、その他は図11と同様である。なお、回転軸推定部17b−1と加速度利用型角速度・反射点座標算出部17b−2の動作は、それぞれ、実施の形態5における回転軸推定部17a−1とレンジ方向加速度利用型角速度・反射点座標算出部17a−2と同様であり、説明を要さない。
【0401】
以上のように、この発明の実施の形態6によれば、位相差変化率・2次微分算出部15aおよび反射点加速度算出部32aを備え、さらに、加速度利用型目標形状・角速度算出部17bを備えるように構成したので、孤立反射点のレンジ方向の位置および孤立反射点の速度に加えて加速度の情報も用いることができるようになり、目標形状の推定精度をさらに向上する効果を奏する。
【0402】
加えて、加速度利用型目標形状・角速度算出部17bが、回転軸推定部17b−1と、加速度利用型角速度・反射点座標算出部17b−2を備えるように構成したので、目標の角速度と孤立反射点の座標の推定に用いる非線形最小二乗問題を効率良く解くことができる効果を奏する。
【0403】
実施の形態7.
図14は、この発明の実施の形態7に係る画像レーダ装置の機能構成を示すブロック図である。図14において、新たな符号として、11dは時変角速度考慮型目標運動・形状推定部、17cは時変角速度考慮型目標形状・角速度算出部であり、その他は図8と同様である。
【0404】
また、図15は、この発明の実施の形態7に係る画像レーダ装置の動作を説明するための説明図である。
【0405】
実施の形態1乃至6に係る画像レーダ装置においては、目標の運動が等角速度運動であることを前提としていた。目標の運動の変動に対して十分に短い時間の間であれば、この前提は成立するが、フレーム数を増やして動画像の観測時間を増加すると等角速度運動の前提が成立しない可能性がある。そこで、本実施の形態7に係る画像レーダ装置においては、角速度が時間の関数であることを想定して目標運動および形状を推定する。ただし、ここでは角速度の時間変化は次式で示す1次式で表されることを前提とする。
【0406】
【数162】
【0407】
ここで、
【0408】
【数163】
【0409】
は角速度の変化率であり、
【0410】
【数164】
【0411】
はn番目のフレーム観測時における角速度を表す。
【0412】
角速度の時間変化を考慮する場合、加速度
【0413】
【数165】
【0414】
と孤立反射点の位置
【0415】
【数166】
【0416】
の関係は、次式で表される。
【0417】
【数167】
【0418】
このように、加速度
【0419】
【数168】
【0420】
は、孤立反射点の位置
【0421】
【数169】
【0422】
と式(43)の関係を満たすので、この関係を目標形状の推定に利用することが出来る。具体的には、式(19)、(20)および(43)の連立方程式を解くことによって、各孤立反射点の位置
【0423】
【数170】
【0424】
を算出できる。なお、式(19)、(20)および(43)の連立方程式をベクトル表現すると次式で表される。
【0425】
【数171】
【0426】
ここで、行列
【0427】
【数172】
【0428】
は式(27)によって定義されるものである(ただし、
【0429】
【数173】
【0430】
で置き換える)。また、
【0431】
【数174】
【0432】
であり、
【0433】
【数175】
【0434】
としたとき、行列
【0435】
【数176】
【0436】
は次式によって定義される。
【0437】
【数177】
【0438】
以上を踏まえ、時変角速度考慮型目標形状・角速度算出部17cは、式(44)の連立方程式を非線形の最小二乗法で解くことによって、n番目のフレーム観測時における角速度
【0439】
【数178】
【0440】
、角速度の変化率
【0441】
【数179】
【0442】
、および各孤立反射点の位置
【0443】
【数180】
【0444】
を算出する。
【0445】
なお、実施の形態5で示したレンジ方向加速度利用型目標形状・角速度算出部17aと同様に、角速度
【0446】
【数181】
【0447】
について、その向きを表す単位ベクトル
【0448】
【数182】
【0449】
と角速度の大きさを表す
【0450】
【数183】
【0451】
を分離して推定する。また、角速度の変化率
【0452】
【数184】
【0453】
が、次の関係を満たすことに着目する。
【0454】
【数185】
【0455】
ここで、表記の都合上、
【0456】
【数186】
【0457】
と定義した。式(46)より、角速度の変化率
【0458】
【数187】
【0459】
については、向きを表す単位ベクトル
【0460】
【数188】
【0461】
の変化率
【0462】
【数189】
【0463】
と、角速度の大きさの変化率
【0464】
【数190】
【0465】
を分離して推定できることが分かる。
【0466】
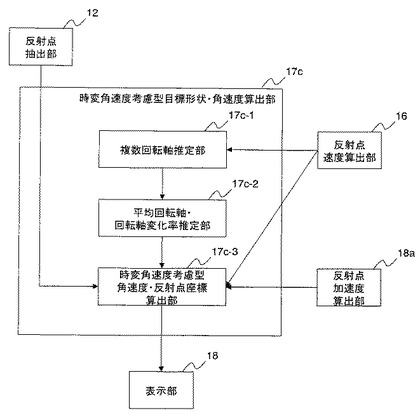
図15は、上記の考え方に基づいて時変角速度考慮型目標形状・角速度算出部17cを構成した場合の構成図である。図15において、新たな符号として、17c−1は複数回転軸推定部、17c−2は平均回転軸・回転軸変化率推定部、17c−3は時変角速度考慮型角速度・反射点座標算出部であり、その他は図14と同様である。
【0467】
まず、複数回転軸推定部17c−1は、実施の形態5に示した回転軸推定部17a−1と同様に、反射点速度算出部16で算出された孤立反射点の速度ベクトル
【0468】
【数191】
【0469】
を用いて、回転軸の向きを複数回推定する。実施の形態5に示した回転軸推定部17a−1においては、n番目のフレームを中心とする近傍Nフレームの観測値を用いて推定した速度ベクトル
【0470】
【数192】
【0471】
を用いて、n番目のフレームの観測時における回転軸を推定していたが、本実施の形態における複数回転軸推定部17c−1は、n番目のフレーム以外にもn+i
【0472】
【数193】
【0473】
番目のフレームを中心としたNフレームの観測値を用いて、n+i番目のフレームの観測時における回転軸もそれぞれ求めるようにする。以下では、このようにして算出された回転軸の推定値を
【0474】
【数194】
【0475】
と表す。
【0476】
次いで、平均回転軸・回転軸変化率推定部17c−2は、
【0477】
【数195】
【0478】
の値を用いて、nフレーム目における回転軸の向きとその変化率を次式によって推定する。
【0479】
【数196】
【0480】
ここで、
【0481】
【数197】
【0482】
はそれぞれ、n番目のフレームにおける回転軸の向きとその変化率の推定値を表す。平均回転軸・回転軸変化率推定部17c−2は、上記のようにして推定された回転軸の向きとその変化率の推定値
【0483】
【数198】
【0484】
を出力する。
【0485】
次に、時変角速度考慮型角速度・反射点座標算出部17c−3においては、角速度の大きさ
【0486】
【数199】
【0487】
の値とその変化率
【0488】
【数200】
【0489】
の組を一つ仮定して、行列
【0490】
【数201】
【0491】
を与えた上で、式(44)を次の線形最小二乗法によって解く。
【0492】
【数202】
【0493】
このとき、孤立反射点の座標
【0494】
【数203】
【0495】
の推定値は仮定した角速度の大きさ
【0496】
【数204】
【0497】
の値とその変化率
【0498】
【数205】
【0499】
の値の関数であるから、
【0500】
【数206】
【0501】
と表記している。また、式(48)の最小二乗法による解における二乗誤差は次式で表される。
【0502】
【数207】
【0503】
次いで、時変角速度考慮型角速度・反射点座標算出部17c−3においては、角速度の大きさ
【0504】
【数208】
【0505】
の値とその変化率
【0506】
【数209】
【0507】
の組を、とりうる値の範囲で様々に仮定して、式(48)を解く。その上で、二乗誤差
【0508】
【数210】
【0509】
を最小にする
【0510】
【数211】
【0511】
の組と、そのときの孤立反射点の座標の推定値
【0512】
【数212】
【0513】
を最終的な推定値として出力する。このように構成することにより、解の探索は
【0514】
【数213】
【0515】
の組についてのみ実施すればよく、その他は線形最小二乗法によって求めることが可能である。
【0516】
以上のように、この発明の実施の形態7によれば、時変角速度考慮型目標形状・角速度算出部17cを備えるように構成したので、目標角速度が時変である場合についても、目標運動と目標形状を推定できる効果を奏する。このことは、観測時間を延長してより多数のフレーム数の動画を利用して目標形状を推定できることを示唆しており、目標形状の推定精度をさらに向上する効果をも奏する。
【0517】
加えて、時変角速度考慮型目標形状・角速度算出部17cが、複数回転軸推定部17c−1、平均回転軸・回転軸変化率推定部17c−2、時変角速度考慮型角速度・反射点座標算出部17c−3を備えるように構成したので、目標の運動と孤立反射点の座標の推定に用いる非線形最小二乗問題を効率良く解くことができる効果を奏する。
【符号の説明】
【0518】
1 送信機、2 送受切換器、3 送受信アンテナ、4,5 受信用補助アンテナ、6〜8 受信機、9 レーダ画像生成部、10 画像履歴蓄積部、11 目標運動・形状推定部、11a 相関動画像利用目標運動・形状推定部、11b ドップラー周波数変化率利用型目標運動・形状推定部、11c 位相差2次微分利用型目標運動・形状推定部、11d 時変角速度考慮型目標運動・形状推定部、12 反射点抽出部、13 フレーム間反射点対応部、14 位相差算出部、15 位相差変異算出部、15a 位相差変化率・2次微分算出部、16 反射点速度算出部、17 目標形状・角速度算出部、17a レンジ方向加速度利用型目標形状・角速度算出部、17a−1 回転軸推定部、17a−2 レンジ方向加速度利用型角速度・反射点座標算出部、17b 加速度利用型目標形状・角速度算出部、17b−1 回転軸推定部、17b−2 加速度利用型角速度・反射点座標算出部、17c 時変角速度考慮型目標形状・角速度算出部、17c−1 複数回転軸推定部、17c−2 平均回転軸・回転軸変化率推定部、17c−3 時変角速度考慮型角速度・反射点座標算出部、26 相関処理部、27 相関画像履歴蓄積部、28 相関画像反射点抽出部、29 形状推定可能性判定部、30 形状合成部、31 ドップラー周波数変化率算出部、32 反射点レンジ方向加速度算出部、32a 反射点加速度算出部。
【技術分野】
【0001】
この発明は、送信電波と反射電波からなる受信電波とに基づき遠方の目標を観測して、目標の形状、反射強度分布、種類などを特定する画像レーダ装置に関するものである。
【背景技術】
【0002】
従来の画像レーダ装置においては、異なる時刻に送受信された電波から得られる2枚のレーダ画像(以下、単に「画像」ともいう)を比較して、レーダ画像上の輝点の画像上での速度分布を収集し、適当な方法で画像レーダ装置と目標との相対運動を推定したうえで、相対運動情報を用いて目標上の電波反射点の3次元空間における位置を算出することにより、目標の3次元形状を得ている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−337163号公報(第5−8頁、図1−図5)
【発明の概要】
【発明が解決しようとする課題】
【0004】
レーダ画像は、目標の三次元形状を、レーダの視線方向と目標の相対運動で決まる二次元の投影面に投影したものとして得られる。レーダの観測においては、目標は、電波を反射する複数の孤立反射点の集合と考えることが出来る。レーダ画像においては、これらの孤立反射点の位置を二次元平面に投影した位置に、輝点が現れる。
【0005】
ところで、レーダ画像を用いて目標の三次元形状を推定するためには、レーダ画像の投影面の向きを知る必要がある。前述の通り、レーダ画像の投影面の向きを決定する要素の一つに、レーダと目標の相対運動が含まれるが、三次元形状を推定する従来の画像レーダ装置においては、レーダと目標との相対運動の推定方法が明確に設定されておらず、画像レーダ装置以外の何らかの手段で画像レーダ装置と目標との相対運動を別途推定する必要があった。特に、ISAR(Inverse Synthetic Aperture Radar)方式によるレーダ画像生成の際は、目標運動は一般に未知であり、目標の相対運動を事前に推定するのは困難であった。
【0006】
この発明は、上記課題を解決するためになされたものであり、目標の相対運動と3次元形状を推定することのできる画像レーダ装置を得ることを目的とする。
【課題を解決するための手段】
【0007】
この発明に係る画像レーダ装置は、目標に対して送信電波を照射する送信手段と、前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用アンテナおよび受信機と、前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部と、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段とを備えたものである。
【発明の効果】
【0008】
この発明によれば、複数のレーダ動画像から観測された視線方向の位置およびドップラー周波数に加えて、観測信号の位相差の情報を利用できるように構成したので、目標の運動と三次元形状を同時に推定することが可能となる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態1に係る画像レーダ装置の機能構成を示すブロック図である。
【図2】この発明の実施の形態1に係る画像レーダ装置の動作原理を説明するもので、観測のジオメトリを示す図である。
【図3】この発明の実施の形態1に係る画像レーダ装置の動作原理を説明するもので、各アンテナで受信された信号を用いて得られるISAR動画像の概念図である。
【図4】この発明の実施の形態1に係る画像レーダ装置の動作原理を説明するもので、観測された位相差の値に直線を当てはめて位相差の変化率を求める概念図である。
【図5】この発明の実施の形態2に係る画像レーダ装置の機能構成を示すブロック図である。
【図6】この発明の実施の形態3に係る画像レーダ装置の機能構成を示すブロック図である。
【図7】この発明の実施の形態4に係る画像レーダ装置の機能構成を示すブロック図である。
【図8】この発明の実施の形態5に係る画像レーダ装置の機能構成を示すブロック図である。
【図9】この発明の実施の形態5に係る画像レーダ装置の動作を説明するための説明図である。
【図10】図9のレンジ方向加速度利用型目標形状・角速度算出部17aの内部構成を示すブロック図ある。
【図11】この発明の実施の形態6に係る画像レーダ装置の機能構成を示すブロック図である。
【図12】この発明の実施の形態6に係る画像レーダ装置の動作を説明するための説明図である。
【図13】図11の加速度利用型目標形状・角速度算出部17bの内部構成を示すブロック図ある。
【図14】この発明の実施の形態7に係る画像レーダ装置の機能構成を示すブロック図である。
【図15】図14の時変角速度考慮型目標形状・角速度算出部17cの内部構成を示すブロック図ある。
【発明を実施するための形態】
【0010】
実施の形態1.
図1は、この発明の実施の形態1に係る画像レーダ装置の機能構成を示すブロック図である。また、図2乃至図4はこの発明の実施の形態1に係る画像レーダ装置の動作原理を説明するための説明図である。以下では、まず、図2乃至図4を用いて、本実施の形態1に係る画像レーダ装置の動作原理を説明する。なお、本明細書においては、画像レーダの方式としてISAR方式を対象として記載するが、SAR(Synthetic Aperture Radar)方式や、その他の画像レーダ方式を用いたものについても、同様の原理が成立することは明らかである。
【0011】
図2は、観測のジオメトリを示す図である。まず、目標は複数の孤立反射点から成る一つの剛体と考える。図2において、19はこの目標を構成する孤立反射点のうちの一つPk(k=1,2,・・・,K;Kは孤立反射点の数)の位置を示す。また、孤立反射点Pkの位置ベクトルを
【0012】
【数1】
【0013】
とする。
【0014】
次に、ここでは、目標が等角速度運動をしていることを前提とし、その角速度ベクトルを
【0015】
【数2】
【0016】
とする。
【0017】
また、図2において、20は目標の回転を表す角速度ベクトル
【0018】
【数3】
【0019】
を表す。一般に、船舶や航空機などの目標が等角速度運動を続けることはないが、短い時間の間、近似的に等角速度運動をしているとみなすことは可能である。また、図2において、21は孤立反射点Pkの速度を表すベクトル
【0020】
【数4】
【0021】
である。目標上の孤立反射点は全て同じ角速度で運動するため、各孤立反射点の速度
【0022】
【数5】
【0023】
は、次式で表される。
【0024】
【数6】
【0025】
また、図2に示すとおり、目標回転軸上の任意の点Oを原点とする直交座標系x、y、z座標を定義する。x、y、z座標の軸の向きは任意であるが、例えばx、y平面が水平面を表し、zが鉛直方向上向きを表すと考えて良い。
【0026】
なお、本明細書において、
【0027】
【数7】
【0028】
のように上線のついた変数は空間内のベクトルを表し、
【0029】
【数8】
【0030】
は変数xの時間微分を表す。また、
【0031】
【数9】
【0032】
のように二重上線のついた変数は行列を表し、
【0033】
【数10】
【0034】
のように
【0035】
【数11】
【0036】
記号のついた変数は長さが1の単位ベクトルを表す。
【0037】
図2において、3、4、5はそれぞれ送受信アンテナと受信用補助アンテナの位置を表している。また、送受信アンテナ3、受信用補助アンテナ4、受信用補助アンテナ5の位置ベクトルを、それぞれ、
【0038】
【数12】
【0039】
とする。さらに、送受信アンテナ3からそれぞれ受信用補助アンテナ4と受信用補助アンテナ5へ向かうベクトルを基線ベクトルと呼び、次式で定義する。
【0040】
【数13】
【0041】
また、図2において、22は、送受信アンテナ3から原点に向かう方向(レーダの視線方向と一致するものとする)を表す単位ベクトルであり、次式で定義される。
【0042】
【数14】
【0043】
なお、以下では、送受信アンテナ3から目標までの距離
【0044】
【数15】
【0045】
が、基線ベクトルの長さと目標のサイズに対して十分に長いものとする。
【0046】
【数16】
【0047】
観測において、送受信アンテナ3は、繰り返し周期(PRI:Pulse Repetition Interval)tpriで広帯域パルスの送受信を繰り返す。また、送受信アンテナ3と同時に受信用補助アンテナ4および受信用補助アンテナ5においても信号を受信する。すると、各アンテナで受信された信号を用いてそれぞれISARの動画像を再生することができる。
【0048】
図3は、各アンテナで受信された信号を用いて得られるISAR動画像の概念図である。図3において、23、24、25は送受信アンテナ3、受信用補助アンテナ4、受信用補助アンテナ5の受信信号を用いてそれぞれ再生されたISAR動画像である。ISAR動画像の1枚目のフレームは、1パルス目からHパルス目のデータを用いて生成され、2フレーム目は1+Jパルス目からH+Jパルス目を用いて生成されるものとする。3フレーム目以降も同様で、結局、nフレーム目は1+(n−1)Jパルス目からH+(n−1)Jパルス目のデータを用いて生成される。このとき、動画像のフレーム間の時間間隔tfrは次式で表される。
【0049】
【数17】
【0050】
また、目標の運動および3次元形状を推定するのに用いる動画像のフレーム数をNとすると、全体の観測に必要な送信パルス数はH+(N−1)Jパルスであり、観測時間は{H+(N−1)J}tpriである。
【0051】
上記の観測およびISAR処理の結果、動画像23、24、25のn番目のフレームにおいて、孤立反射点Pkに対応する輝点が現れるものとする。すると、このフレームにおける輝点の座標の読み取り値から孤立反射点Pkのレーダの視線方向の位置rknとドップラー周波数fdkn、および輝点のピーク複素振幅s0kn、s1kn、s2knが観測される(図3参照)。ここで、厳密には各アンテナから孤立反射点Pkまでの距離や、各アンテナで観測されるドップラー周波数は異なるが、式(5)の条件より、rknとfdknは送受信アンテナ3における観測量で代表できるものとする。
【0052】
以下では、これらの観測量と、求めたい未知パラメータ
【0053】
【数18】
【0054】
および
【0055】
【数19】
【0056】
との関係を導く。まず、rknとfdknは次式の関係を満たす。
【0057】
【数20】
【0058】
ただし、ISAR画像上におけるレンジ方向の原点の位置は、空間内に定義した原点Oであるとして定義した。なお、孤立反射点の位置
【0059】
【数21】
【0060】
は当然時変であるが、以下ではn番目のフレームの観測時(より具体的には、
【0061】
【数22】
【0062】
パルス目の送受信時;ただし,
【0063】
【数23】
【0064】
は小数点以下の切り捨てを表す)における位置を
【0065】
【数24】
【0066】
と考える。
【0067】
次に、ピーク複素振幅s0kn、s1kn、s2knについては、これらの観測値の間の位相差と
【0068】
【数25】
【0069】
が次式の関係を満たす。
【0070】
【数26】
【0071】
なお、式(9)と式(10)は、アレイアンテナを用いて遠方からの到来波を受信する際に、その到来角度によって決まるアレイ素子間の位相差の式に他ならない。目標の回転に伴い、
【0072】
【数27】
【0073】
が変化するため、φ1kn、φ2knは変化するが、短い時間の間ではその変化はほぼ線形とみなすことができ、その変化率は次式で表される。
【0074】
【数28】
【0075】
ここで、式(11)、式(12)の導出には以下の関係および近似を用いた。
【0076】
【数29】
【0077】
なお、
【0078】
【数30】
【0079】
のとき、送受信アンテナ3から各孤立反射点への方向はほぼ平行であるため、次式の近似が成り立つ。
【0080】
【数31】
【0081】
また、位相差の変化率
【0082】
【数32】
【0083】
は、n番目のフレームの前後のNフレームにおける位相差の値
【0084】
【数33】
【0085】
を用い、式(15)、(16)で表される最小二乗法による直線あてはめによって推定できる。
【0086】
【数34】
【0087】
なお、ここで、
【0088】
【数35】
【0089】
は小数点以下の切り捨て、
【0090】
【数36】
【0091】
は小数点以下の切り上げをそれぞれ表す。
【0092】
図4は、観測された位相差の値に直線を当てはめて式(15)、(16)に示す位相差の変化率を求める概念図である。
【0093】
原理的には、上記で導いた式(1)、(7)、(8)、(11)、(12)の関係を用いて、目標の運動および三次元形状を推定することが可能である。以下では、図1を用いて、この発明の実施の形態1に係る画像レーダ装置の機能構成および動作について説明する。
【0094】
図1に示す画像レーダ装置は、送信機1、送受切換器2、送受信アンテナ3、受信用補助アンテナ4及び5、受信機6〜8、レーダ画像生成部9、画像履歴蓄積部10、目標運動・形状推定部11及び表示部18を備えている。ここで、目標運動・形状推定部11は、反射点抽出部12、フレーム間反射点対応部13、位相差算出部14、位相差変異算出部15、反射点速度算出部16、目標形状・角速度算出部17を有し、目標形状・角速度算出部17で算出された結果は表示部18で表示される。
【0095】
送信機1は、周知の発振器および変調器などを含み、送受切換器2および受信機6〜8とともに、送受信制御部(図示せず)の制御下で駆動される。送受信アンテナ3は、目標に向けて送信パルスを出射するとともに、送信パルスが目標で反射されて戻ってくる反射電波を受信電波として受信する。このとき、受信用補助アンテナ4と5も同時に該反射電波を受信電波として受信する。
【0096】
受信機6〜8は、それぞれ送受信アンテナ3および受信用補助アンテナ4、5で受信された電波を増幅、検波して得られた受信信号をレーダ画像再生部9に送る。そして、前述の通り、本実施の形態1に係る画像レーダ装置においては、以上のようなパルスの送受信を繰返し周期tpriで繰り返す。
【0097】
レーダ画像再生部9では、前述の通り、それぞれ送受信アンテナ3、受信用補助アンテナ4、受信用補助アンテナ5の受信信号を用いてISAR動画像23、24、25を再生する。ここで、nフレーム目を再生するためには1+(n−1)Jパルス目からH+(n−1)Jパルス目のデータを用いる。
【0098】
画像履歴蓄積部10では、レーダ画像再生部9で再生された動画像23、24、25をメモリに蓄積する。目標運動・形状推定部11は、画像履歴蓄積部10に一旦格納された動画像23、24、25の情報を利用して、目標の運動と形状を推定して、推定結果の形状を表示部18に出力する。
【0099】
以下では、目標運動・形状推定部11の構成と動作を説明する。まず、反射点抽出部12では、動画像の各フレームにおいて、輝点(輝度の強い点)を検出し、その位置と複素振幅を計測する。輝点の検出には一般に良く知られたCFAR(Constant False Alarm Rate)処理などを用いればよい。以下では、反射点抽出部12において、動画像の各フレームにおいてK点ずつの点目標が検出されたと仮定して説明を進める。反射点抽出部12は、検出処理の結果として、K点の点目標について、レーダの視線方向の位置rknとドップラー周波数fdkn、および輝点のピーク複素振幅s0kn、s1kn、s2knを出力する(k=1,2,・・・,K)。
【0100】
フレーム間反射点対応部13では、各フレームで検出された輝点同士を対応付ける。ここでは、レーダの目標追尾などに利用される追尾方式などを利用して対応付けを行う。反射点抽出部12の出力結果において、n+1フレーム目におけるk番目の輝点の信号と、nフレーム目におけるk番目の輝点の信号が、同じ孤立反射点からの信号に対応しているとは限らない。フレーム間反射点対応部13における対応付け処理(追尾処理)によって、フレーム間での輝点の対応付けがなされ、その結果、同じ孤立反射点Pkの信号が全てのフレームにおいて、k番目の信号としてラベル付けされる。
【0101】
なお、反射点抽出部12において、全てのフレームにおいて点目標が必ずK点検出されるとは限らない。例えば、n番目のフレームにおいてK点検出されていて、n+1番目のフレームにおいてK−1点しか検出されなければ、n番目で検出された輝点のうち一つは、n+1番目のフレームで検出された輝点と対応付けられないことになる。このような場合は、フレーム間反射点対応部13において対応付けできない旨を判定して記録する。
【0102】
次いで、位相差算出部14では、送受信アンテナ3と、受信用補助アンテナ4,5で得られた信号の位相差を、各フレーム、各検出信号に対して次式によって算出する。
【0103】
【数37】
【0104】
次に、位相差変化率算出部15は、各フレーム、各検出信号に対して次式に示す位相差の変化率を算出する。
【0105】
【数38】
【0106】
なお、位相差変化率算出部15における上記の最小二乗法による変化率の算出の代わりに、各輝点の反射強度(反射電力や振幅など)で重み付けを行い、重み付け最小二乗法によって変化率を算出しても良い。重み付けをすることによって、SNR(Signal to Noise Ratio)の高い信号の情報をより重視することが出来、位相差変化率の推定精度を向上することが可能である。
【0107】
次に、反射点速度算出部16は、各孤立反射点の速度
【0108】
【数39】
【0109】
を求める。反射点速度算出部16の処理を説明するために、まず、式(8)、(11)、(12)を整理してまとめると次式を得る。
【0110】
【数40】
【0111】
ただし、上付きのTは行列の転置を表す。ここで、行列
【0112】
【数41】
【0113】
を構成する要素は、レーダの視線方向ベクトル
【0114】
【数42】
【0115】
と基線ベクトル
【0116】
【数43】
【0117】
であり、これらは既知であると考えることができる。また、左辺を構成する要素はレンジrkn、ドップラー周波数fdknと位相差の変化率
【0118】
【数44】
【0119】
であるが、レンジrkn、ドップラー周波数fdknは、反射点抽出部12の出力(ただし、フレーム間反射点対応部13によってラベル付けされたもの)として得られており、位相差の変化率
【0120】
【数45】
【0121】
は位相差変化率算出部15の出力として得られている。さらに、原点までの距離r0と波長λも含まれるが、これらは既知の値として扱うことができる。
【0122】
以上より、反射点速度算出部16は、各孤立反射点の速度
【0123】
【数46】
【0124】
を次式によって求める。
【0125】
【数47】
【0126】
目標形状・角速度算出部17は、角速度
【0127】
【数48】
【0128】
および各孤立反射点の位置
【0129】
【数49】
【0130】
を算出する。以下に、式(1)、(7)を再度示す。
【0131】
【数50】
【0132】
これらの方程式の左辺において、
【0133】
【数51】
【0134】
は式(18)で得られており、rknは観測値である。また、これらの方程式はK個の孤立反射点についてそれぞれ成り立つので、得られる方程式の数は3K+K本である。一方、未知のパラメータは
【0135】
【数52】
【0136】
と
【0137】
【数53】
【0138】
であり、未知変数の数は3+3K個である。したがって、連立方程式が解を持つための必要条件は、次式で表される。
【0139】
【数54】
【0140】
すなわち、目標上に孤立反射点が3点以上存在して、それが観測できることが条件である。一般に、レーダの観測対象となる目標を構成する孤立反射点の数は3つ以上であるから、この条件は概して成立すると考えてよい。
【0141】
以上を踏まえ、目標形状・角速度算出部17は、式(19)、(20)の連立方程式を解くことによって、角速度
【0142】
【数55】
【0143】
および各孤立反射点の位置
【0144】
【数56】
【0145】
を算出する。なお、K>3の場合は最小二乗法によって解を求める。また、ここでも、位相差変化率算出部15の場合と同様に、各輝点の強度によって重み付けをした重み付け最小二乗法を用いて解を求めても良い。重み付けをすることによって、SNRの高い信号の情報を重視するために、角速度の推定精度および目標形状の推定精度を向上することが可能である。
【0146】
最後に、目標形状・角速度算出部17において算出された孤立反射点の位置
【0147】
【数57】
【0148】
は表示部18に送られ、表示部18は推定された目標の三次元形状を表示する。
【0149】
ところで、反射点速度算出部16の処理において、
【0150】
【数58】
【0151】
の逆行列が存在する条件は、次式で表される。
【0152】
【数59】
【0153】
すなわち、2つの基線ベクトルが互いに平行でなく、かつ、レーダの視線ベクトルが2つの基線ベクトルの張る平面に直交する成分を持っていることが条件となる。したがって、受信用補助アンテナ4、5は上記の条件を満たすように配置する必要がある。なお、受信用補助アンテナ4、5は2つの基線ベクトルが直交するように配置するのが望ましい。
【0154】
また、目標形状・角速度算出部17において、連立方程式(19)、(20)が線形独立である条件は、次式で表される。
【0155】
【数60】
【0156】
つまり、目標の回転軸がレーダの視線方向と一致しないこと、および回転軸がレーダの視線方向と直交しないことを示している。この条件が成立するためには、目標の運動が既知である必要があるため、条件によっては目標の三次元形状が推定できない場合があることを示唆する。この問題に対する対策は実施の形態3に述べる。
【0157】
以上のように、この発明の実施の形態1によれば、送受信アンテナ3に加えて受信用補助アンテナ4、5を具備し、各アンテナに接続された受信機6〜8で受信した信号を用いてそれぞれISAR動画像を生成することにより、これらのISAR動画像から観測された視線方向の位置およびドップラー周波数に加えて、観測信号の位相差の情報を利用できるように構成したので、レーダの観測信号を用いることで、目標の運動と三次元形状を同時に推定することが可能となる効果を奏する。
【0158】
なお、以上においては、受信用補助アンテナの数は2つに限定して説明していたが、2つ以上ある場合も、同様の原理によって、実施が可能である。
【0159】
実施の形態2.
図5は、この発明の実施の形態2に係る画像レーダ装置の機能構成を示すブロック図である。図5において、新たな符号として、26は相関処理部、11aは相関動画像利用目標運動・形状推定部、27は相関画像履歴蓄積部、28は相関画像反射点抽出部であり、その他は図1と同様である。
【0160】
ISAR動画像23、24、25の各フレームの画素数をレンジ軸方向にI個、ドップラー軸方向にJ個とする。動画像23、24、25の(i,j)における画素の観測値をそれぞれs0n(i,j)、s1n(i,j)、s2n(i,j)とすると、相関処理部26では、動画像23と動画像24の相関および動画像23と動画像25の相関を次式によって算出する。
【0161】
【数61】
【0162】
ここで、算出されたc10n(i,j)とc20n(i,j)を、以下では相関動画像と呼ぶ。式(21)、(22)では、簡単のため、画素単位で複素共役を掛け合わせる処理のみを記してあるが、相関処理部26では、相関を計算する画像のうち一方をサブピクセル単位でずらしながら、画素毎の相関値の二乗和が最大となるような計算をして、2つの画像の位置あわせを実施するように構成しても良い。このようにすることによって、送受信アンテナ3および受信用補助アンテナ4,5で観測された動画像23、24、25の位置あわせを実施することが出来る。相関処理部26によって算出されたこれらの相関動画像は、相関画像履歴蓄積部27に送られてメモリに一旦格納される。
【0163】
相関画像反射点抽出部28は、相関動画像の中から、振幅あるいは電力値の大きい輝点を検出する。ここでの処理は、反射点抽出部12と同様にCFAR処理などによって実現できる。相関画像反射点抽出部28は検出処理の結果として、K点の点目標について、レーダの視線方向の位置rknとドップラー周波数fdkn、および輝点のピーク位置における位相差φ1kn,φ2knを出力する(k=1,2,・・・,K)。
【0164】
以下の動作は実施の形態1と同様であるが、相関画像反射点抽出部28においてすでに位相差が算出されているので、実施の形態1で必要であった位相差算出部14は不要となる。
【0165】
以上のように、この発明の実施の形態2によれば、送受信アンテナ3と受信用補助アンテナ4,5に接続された受信機で受信した信号を用いてそれぞれISAR動画像を生成し、最初にこれらのISAR動画像のフレーム毎に相関動画像を算出する際にサブピクセル単位で画像間の位置あわせを実施するため、位相差の推定精度が向上し、ひいては目標運動及び形状の推定精度を向上できる効果を奏する。
【0166】
実施の形態3.
図6は、この発明の実施の形態3に係る画像レーダ装置の機能構成を示すブロック図である。図6において、新たな符号として、29は形状推定可能性判定部であり、その他は図1と同様である。
【0167】
式(23)に示したとおり、目標の回転軸がレーダの視線方向と一致する場合、または、回転軸がレーダの視線方向と直交する場合、目標形状・角速度推定部17においては、連立方程式の線形独立性がくずれるため、孤立反射点の位置ベクトル
【0168】
【数62】
【0169】
及び角速度
【0170】
【数63】
【0171】
を算出することができない。そこで、形状推定可能性判定部29では、反射点速度算出部16で算出された孤立反射点の速度ベクトル
【0172】
【数64】
【0173】
を用いて、まず、回転軸の向きを推定する。
【0174】
図2のジオメトリからも明らかなように、孤立反射点の速度ベクトル
【0175】
【数65】
【0176】
は回転軸と直交する関係にある。したがって、形状推定可能性判定部29においては、反射点速度算出部16で算出された孤立反射点の速度ベクトル
【0177】
【数66】
【0178】
の全てに直交するベクトルを算出することで、回転軸の向きを算出する。ただし、一般的には、速度ベクトル
【0179】
【数67】
【0180】
の推定量には誤差分が含まれているため、速度ベクトル
【0181】
【数68】
【0182】
の全てに直交するベクトルは存在しない場合がある。
【0183】
このような場合にも対応するため、例えば、形状推定可能性判定部29では、以下のような方法で回転軸を推定する。まず、次式によって、速度ベクトル
【0184】
【数69】
【0185】
の共分散行列
【0186】
【数70】
【0187】
を算出する。
【0188】
【数71】
【0189】
次に、この共分散行列
【0190】
【数72】
【0191】
の固有値分解を実施し、最小固有値に対応する固有ベクトル
【0192】
【数73】
【0193】
を得る。この最小固有値に対応する固有ベクトルの向きを回転軸とする。なお、反射点速度算出部16で算出された孤立反射点の速度ベクトル
【0194】
【数74】
【0195】
が誤差を持たなければ、最小固有値の値は0となる。
【0196】
次いで、最小固有値に対応する固有ベクトル
【0197】
【数75】
【0198】
と視線方向ベクトル
【0199】
【数76】
【0200】
を比較する。この2つのベクトルが、平行でもなく、直交もしていなければ、目標形状・角速度算出部17において、孤立反射点の位置ベクトル
【0201】
【数77】
【0202】
及び角速度
【0203】
【数78】
【0204】
を算出する。一方、この2つのベクトルが平行であるか、あるいは直交している場合については、表示部18にその旨を出力し、表示部18においては、現在の位置関係では目標形状を正しく推定できないことをオペレータに伝える。画像レーダ装置が例えばヘリコプタなどの移動体に装備されている場合、オペレータは、この情報に基づいて画像レーダ装置を搭載した移動体の位置を移動させ、再度観測をやり直すことにより、目標の運動及び三次元形状を推定する。
【0205】
以上のように、この発明の実施の形態3によれば、形状推定可能性判定部29を備えるように構成したので、目標の孤立反射点の速度を推定した後に、形状推定の可能性を判定し、可能であれば形状推定を実施し、不可能であれば、プラットフォームを移動することで、形状推定を可能とする効果を奏する。
【0206】
実施の形態4.
図7は、この発明の実施の形態4に係る画像レーダ装置の機能構成を示すブロック図である。図7において、新たな符号として、30は形状合成部であり、その他は図1と同様である。
【0207】
実施の形態1乃至3においては、ISAR動画像のうちN個のフレームの情報を用いて目標運動及び形状を推定していた。しかし、ISAR動画像は連続的に観測し続けることが可能であるため、連続するN個のフレームを用いて、目標形状を次々と繰り返し推定することが可能である。形状合成部30では、これらの連続して推定された形状を合成して、より精度のよい形状推定結果を得る。
【0208】
形状合成部30は、例えば、連続して得られた推定結果を単に重畳するように構成することが出来る。特に、目標形状が複雑で、一方向からの観測だけでは遮蔽の影響により全体の形状が推定できないような場合、長時間の観測により複数の方向から観測された信号を元に推定された結果を重畳して表示することができ、より正確な三次元形状を得ることが可能となる。
【0209】
または、形状合成部30は、個々の推定結果の平均処理をするような形で、推定精度を向上するように構成しても良い。
【0210】
以上のように、この発明の実施の形態4によれば、形状合成部30を備えるように構成したので、複数回の形状推定結果を合成することができる。そのため、形状推定精度が向上したり、複数の角度から観測された形状を重畳することで、遮蔽の影響を低減する効果を奏する。
【0211】
実施の形態5.
図8は、この発明の実施の形態5に係る画像レーダ装置の機能構成を示すブロック図である。図8において、新たな符号として、11bはドップラー周波数変化率利用型目標運動・形状推定部、17aはレンジ方向加速度利用型目標形状・角速度算出部、31はドップラー周波数変化率算出部、32は反射点レンジ方向加速度算出部であり、その他は図1と同様である。
【0212】
また、図9と図10は、この発明の実施の形態5に係る画像レーダ装置の動作を説明するための説明図である。
【0213】
実施の形態1乃至4の目標運動・形状推定部11および相関動画像利用目標運動・形状推定部11aの処理において、ドップラー周波数についてはn番目のフレームにおけるドップラー周波数fdknの情報のみを利用していた。しかし、一般に孤立反射点のドップラー周波数の値は、図9に示すように時間と共に変化する。したがって、ドップラー周波数の変化率の情報も用いたほうが目標形状の推定精度を向上できることが期待される。そこで、ドップラー周波数変化率利用型目標運動・形状推定部11bでは、目標形状および角速度の推定に、ドップラー周波数の変化率
【0214】
【数79】
【0215】
の情報も用いる。
【0216】
以下では、まず、レンジ方向加速度利用型目標形状・角速度算出部17aの動作を説明するため、ドップラー周波数の変化率
【0217】
【数80】
【0218】
が得られたと仮定した場合の形状推定方式について説明し、ドップラー周波数の変化率
【0219】
【数81】
【0220】
の推定方式については後述する。
【0221】
ドップラー周波数の変化率
【0222】
【数82】
【0223】
を観測すると、孤立反射点Pkのレンジ方向の速度の変化率
【0224】
【数83】
【0225】
が次式によって求められる。
【0226】
【数84】
【0227】
一方で、レンジ方向の速度の変化率
【0228】
【数85】
【0229】
と孤立反射点の位置
【0230】
【数86】
【0231】
は、次式の関係を満たす。
【0232】
【数87】
【0233】
なお、ここでは、実施の形態1乃至4と同様に目標が等角速度運動をしていることを前提とし、その角速度ベクトルの変化率はゼロとした。
【0234】
【数88】
【0235】
このように、ドップラー周波数の変化率
【0236】
【数89】
【0237】
から求められたレンジ方向の速度の変化率
【0238】
【数90】
【0239】
は、孤立反射点の位置
【0240】
【数91】
【0241】
と式(24)の関係を満たすので、この関係を目標形状の推定に利用することが出来る。具体的には、式(19)、(20)および式(24)の連立方程式を解くことによって、各孤立反射点の位置
【0242】
【数92】
【0243】
を算出できる。なお、式(19)、(20)および(24)の連立方程式をベクトル表現すると次式で表される。
【0244】
【数93】
【0245】
ここで、上付きのTはベクトルおよび行列の転置を表す。また、
【0246】
【数94】
【0247】
であり、
【0248】
【数95】
【0249】
としたとき、行列
【0250】
【数96】
【0251】
は次式によって定義される。
【0252】
【数97】
【0253】
なお、式(26)において、各孤立反射点の速度については、n番目のフレーム観測時における速度であることを明示するため、
【0254】
【数98】
【0255】
と表記している。
【0256】
以上を踏まえ、レンジ方向加速度利用型目標形状・角速度算出部17aは、式(26)の連立方程式を非線形の最小二乗法で解くことによって、角速度
【0257】
【数99】
【0258】
および各孤立反射点の位置
【0259】
【数100】
【0260】
を算出する。
【0261】
式(26)の解法については如何なる方法を用いてもかまわないが、角速度
【0262】
【数101】
【0263】
について、その向きを表す単位ベクトル
【0264】
【数102】
【0265】
と角速度の大きさを表す
【0266】
【数103】
【0267】
を分離して推定することによって、式(26)をより効率良く解くことが可能となる。
【0268】
図10は、この考え方に基づいてレンジ方向加速度利用型目標形状・角速度算出部17aを構成した場合の構成図である。図10において、新たな符号として、17a−1は回転軸推定部、17a−2はレンジ方向加速度利用型角速度・反射点座標算出部であり、その他は図8と同様である。
【0269】
回転軸推定部17a−1においては、実施の形態3に示した形状推定可能性判定部29と同様に、反射点速度算出部16で算出された孤立反射点の速度ベクトル
【0270】
【数104】
【0271】
を用いて、回転軸の向きを推定する。すなわち、まず、次式によって、速度ベクトル
【0272】
【数105】
【0273】
の共分散行列
【0274】
【数106】
【0275】
を算出する。
【0276】
【数107】
【0277】
次に、この共分散行列
【0278】
【数108】
【0279】
の固有値分解を実施し、最小固有値に対応する固有ベクトル
【0280】
【数109】
【0281】
を得る。この最小固有値に対応する固有ベクトルの向きを回転軸とみなし、角速度
【0282】
【数110】
【0283】
の向きを表す単位ベクトル
【0284】
【数111】
【0285】
の推定値を
【0286】
【数112】
【0287】
で与える。
【0288】
次いで、レンジ方向加速度利用型角速度・反射点座標算出部17a−2においては、
【0289】
【数113】
【0290】
の値を一つ仮定して、行列
【0291】
【数114】
【0292】
を与えた上で、式(26)を次の線形最小二乗法によって解く。
【0293】
【数115】
【0294】
このとき、孤立反射点の座標
【0295】
【数116】
【0296】
の推定値は仮定した
【0297】
【数117】
【0298】
の値の関数であるから、
【0299】
【数118】
【0300】
と表記している。また、式(29)の最小二乗法による解における二乗誤差は次式で表される。
【0301】
【数119】
【0302】
次いで、レンジ方向加速度利用型角速度・反射点座標算出部17a−2においては、
【0303】
【数120】
【0304】
の値をとりうる値の範囲で様々に仮定して、式(29)を解く。その上で、二乗誤差
【0305】
【数121】
【0306】
を最小にする
【0307】
【数122】
【0308】
と、そのときの孤立反射点の座標の推定値
【0309】
【数123】
【0310】
を最終的な推定値として出力する。このように構成することにより、解の探索は回転の速さ
【0311】
【数124】
【0312】
についてのみ実施すればよく、その他は線形最小二乗法によって求めることが可能である。
【0313】
以上においては、ドップラー周波数の変化率
【0314】
【数125】
【0315】
が得られたものと仮定して議論を進めたが、ドップラー周波数の変化率
【0316】
【数126】
【0317】
は、実施の形態1における位相差変化率算出部15の動作と同様に、n番目のフレームの前後のNフレームにおけるドップラー周波数の値
【0318】
【数127】
【0319】
から推定することが可能である。すなわち、ドップラー周波数変化率算出部31は、次式によってドップラー周波数の変化率
【0320】
【数128】
【0321】
を推定する。これはすなわち、図9に示すようにn番目のフレームの前後のNフレームにおけるドップラー周波数の観測値に当てはめた直線の傾きに相当する。
【0322】
【数129】
【0323】
ここで、
【0324】
【数130】
【0325】
はドップラー周波数の変化率の推定値を表す。なお、ドップラー周波数変化率算出部31における上記の最小二乗法による変化率の算出の代わりに、各輝点の反射強度(反射電力や振幅など)で重み付けを行い、重み付け最小二乗法によって変化率を算出しても良い。重み付けをすることによって、SNR(Signal to Noise Ratio)の高い信号の情報をより重視することが出来、ドップラー周波数変化率の推定精度を向上することが可能である。
【0326】
ドップラー周波数変化率算出部31においてドップラー周波数の変化率の推定値
【0327】
【数131】
【0328】
が算出された後は、反射点レンジ方向加速度算出部32において式(23)によりレンジ方向の加速度が算出される。
【0329】
以上のように、この発明の実施の形態5によれば、ドップラー周波数変化率算出部31および反射点レンジ方向加速度算出部32を備え、さらに、レンジ方向加速度利用型目標形状・角速度算出部17aを備えるように構成したので、孤立反射点のレンジ方向の位置および孤立反射点の速度に加えて、レンジ方向の加速度の情報も用いることができるようになり、目標形状の推定精度を向上する効果を奏する。
【0330】
また、レンジ方向加速度利用型目標形状・角速度算出部17aが、回転軸推定部17a−1と、レンジ方向加速度利用型角速度・反射点座標算出部17a−2を備えるように構成したので、目標の角速度と孤立反射点の座標の推定に用いる非線形最小二乗問題を効率良く解くことができる効果を奏する。
【0331】
実施の形態6.
図11は、この発明の実施の形態6に係る画像レーダ装置の機能構成を示すブロック図である。図11において、新たな符号として、11cは位相差2次微分利用型目標運動・形状推定部、15aは位相差変化率・2次微分算出部、17bは加速度利用型目標形状・角速度算出部、32aは反射点加速度算出部であり、その他は図8と同様である。
【0332】
また、図12と図13は、この発明の実施の形態6に係る画像レーダ装置の動作を説明するための説明図である。
【0333】
実施の形態5のレンジ方向加速度利用型目標形状・角速度算出部17aでは、目標形状および角速度の推定に、ドップラー周波数の変化率の推定値から求められるレンジ方向の加速度の情報を利用している。しかし、一般に孤立反射点の加速度はレンジ方向のみならず、レンジに直交する成分も有している。したがって、加速度のレンジ方向に直交する成分を用いることができれば、目標形状の推定精度を向上できると期待される。
【0334】
本実施の形態6に係る画像レーダ装置においては、位相差の2次微分成分の推定値から加速度のレンジ方向に直交する成分を推定する。まず、位相差変化率・2次微分算出部15aにおいては、図12に示すように位相差の観測値に最小二乗法によって2次の曲線を当てはめることによって、位相差の変化率と2次微分成分を算出する。すなわち、nフレーム目における位相差、位相差の変化率、位相差の2次微分を次式によって推定する。
【0335】
【数132】
【0336】
ここで、
【0337】
【数133】
【0338】
はそれぞれ、送受信アンテナ3と受信用補助アンテナ4で得られた信号のn番目のフレームにおける位相差、位相差の変化率、位相差の2次微分の推定値を表す。また、
【0339】
【数134】
【0340】
はそれぞれ、送受信アンテナ3と受信用補助アンテナ5で得られた信号のn番目のフレームにおける位相差、位相差の変化率、位相差の2次微分の推定値を表す。位相差変化率・2次微分算出部15aは、以上によって算出された
【0341】
【数135】
【0342】
を出力する。
【0343】
次いで、反射点加速度算出部32aは、ドップラー周波数変化率算出部31によって算出されたドップラー周波数の変化率の推定値
【0344】
【数136】
【0345】
と位相差変化率・2次微分算出部15aにおいて算出された位相差、位相差の変化率、位相差の2次微分の推定値
【0346】
【数137】
【0347】
を利用して、孤立反射点の加速度を算出する。
【0348】
ここで、位相差の2次微分と加速度の関係は次式で表される。
【0349】
【数138】
【0350】
ただし、式(34)、式(35)の導出には以下の関係および近似を用いた。
【0351】
【数139】
【0352】
観測対象の目標のサイズに対して十分に遠方から観測していることを想定しているため、
【0353】
【数140】
としている。なお、
【0354】
【数141】
【0355】
のとき、送受信アンテナ3から各孤立反射点への方向はほぼ平行であるため、次式の近似が成り立つ。
【0356】
【数142】
【0357】
反射点加速度算出部32aは、式(34)、(35)および(23)より、反射点の加速度を算出する。まず、式(34)、(35)および(23)を整理してベクトル表現で表すと次式で表される。
【0358】
【数143】
【0359】
したがって、加速度
【0360】
【数144】
【0361】
は次式によって算出できる。
【0362】
【数145】
【0363】
反射点加速度算出部32aは、式(39)によって算出された加速度
【0364】
【数146】
【0365】
を出力する。
【0366】
次いで、加速度利用型目標形状・角速度算出部17bは、実施の形態5におけるレンジ方向加速度利用型目標形状・角速度算出部17aと同様の操作により、角速度
【0367】
【数147】
【0368】
および各孤立反射点の位置
【0369】
【数148】
【0370】
を算出する。
【0371】
まず、加速度
【0372】
【数149】
【0373】
と孤立反射点の位置
【0374】
【数150】
【0375】
の関係を次式に示す。
【0376】
【数151】
【0377】
なお、ここでは、実施の形態5と同様に目標が等角速度運動をしていることを前提とし、その角速度ベクトルの変化率はゼロとした。
【0378】
このように、加速度
【0379】
【数152】
【0380】
は、孤立反射点の位置
【0381】
【数153】
【0382】
と式(40)の関係を満たすので、この関係を目標形状の推定に利用することが出来る。具体的には、式(19)、(20)および(40)の連立方程式を解くことによって、各孤立反射点の位置
【0383】
【数154】
【0384】
を算出できる。なお、式(19)、(20)および(40)の連立方程式をベクトル表現すると次式で表される。
【0385】
【数155】
【0386】
ここで、行列
【0387】
【数156】
【0388】
は式(27)によって定義されるものである。
【0389】
以上を踏まえ、加速度利用型目標形状・角速度算出部17bは、式(41)の連立方程式を非線形の最小二乗法で解くことによって、角速度
【0390】
【数157】
【0391】
および各孤立反射点の位置
【0392】
【数158】
【0393】
を算出する。なお、実施の形態5で示したレンジ方向加速度利用型目標形状・角速度算出部17aと同様に、角速度
【0394】
【数159】
【0395】
について、その向きを表す単位ベクトル
【0396】
【数160】
【0397】
と回転の速さを表す
【0398】
【数161】
【0399】
を分離して推定することによって、式(41)をより効率良く解くことが可能である。
【0400】
図13は、この考え方に基づいて加速度利用型目標形状・角速度算出部17bを構成した場合の構成図である。図13において、新たな符号として、17b−1は回転軸推定部、17b−2は加速度利用型角速度・反射点座標算出部であり、その他は図11と同様である。なお、回転軸推定部17b−1と加速度利用型角速度・反射点座標算出部17b−2の動作は、それぞれ、実施の形態5における回転軸推定部17a−1とレンジ方向加速度利用型角速度・反射点座標算出部17a−2と同様であり、説明を要さない。
【0401】
以上のように、この発明の実施の形態6によれば、位相差変化率・2次微分算出部15aおよび反射点加速度算出部32aを備え、さらに、加速度利用型目標形状・角速度算出部17bを備えるように構成したので、孤立反射点のレンジ方向の位置および孤立反射点の速度に加えて加速度の情報も用いることができるようになり、目標形状の推定精度をさらに向上する効果を奏する。
【0402】
加えて、加速度利用型目標形状・角速度算出部17bが、回転軸推定部17b−1と、加速度利用型角速度・反射点座標算出部17b−2を備えるように構成したので、目標の角速度と孤立反射点の座標の推定に用いる非線形最小二乗問題を効率良く解くことができる効果を奏する。
【0403】
実施の形態7.
図14は、この発明の実施の形態7に係る画像レーダ装置の機能構成を示すブロック図である。図14において、新たな符号として、11dは時変角速度考慮型目標運動・形状推定部、17cは時変角速度考慮型目標形状・角速度算出部であり、その他は図8と同様である。
【0404】
また、図15は、この発明の実施の形態7に係る画像レーダ装置の動作を説明するための説明図である。
【0405】
実施の形態1乃至6に係る画像レーダ装置においては、目標の運動が等角速度運動であることを前提としていた。目標の運動の変動に対して十分に短い時間の間であれば、この前提は成立するが、フレーム数を増やして動画像の観測時間を増加すると等角速度運動の前提が成立しない可能性がある。そこで、本実施の形態7に係る画像レーダ装置においては、角速度が時間の関数であることを想定して目標運動および形状を推定する。ただし、ここでは角速度の時間変化は次式で示す1次式で表されることを前提とする。
【0406】
【数162】
【0407】
ここで、
【0408】
【数163】
【0409】
は角速度の変化率であり、
【0410】
【数164】
【0411】
はn番目のフレーム観測時における角速度を表す。
【0412】
角速度の時間変化を考慮する場合、加速度
【0413】
【数165】
【0414】
と孤立反射点の位置
【0415】
【数166】
【0416】
の関係は、次式で表される。
【0417】
【数167】
【0418】
このように、加速度
【0419】
【数168】
【0420】
は、孤立反射点の位置
【0421】
【数169】
【0422】
と式(43)の関係を満たすので、この関係を目標形状の推定に利用することが出来る。具体的には、式(19)、(20)および(43)の連立方程式を解くことによって、各孤立反射点の位置
【0423】
【数170】
【0424】
を算出できる。なお、式(19)、(20)および(43)の連立方程式をベクトル表現すると次式で表される。
【0425】
【数171】
【0426】
ここで、行列
【0427】
【数172】
【0428】
は式(27)によって定義されるものである(ただし、
【0429】
【数173】
【0430】
で置き換える)。また、
【0431】
【数174】
【0432】
であり、
【0433】
【数175】
【0434】
としたとき、行列
【0435】
【数176】
【0436】
は次式によって定義される。
【0437】
【数177】
【0438】
以上を踏まえ、時変角速度考慮型目標形状・角速度算出部17cは、式(44)の連立方程式を非線形の最小二乗法で解くことによって、n番目のフレーム観測時における角速度
【0439】
【数178】
【0440】
、角速度の変化率
【0441】
【数179】
【0442】
、および各孤立反射点の位置
【0443】
【数180】
【0444】
を算出する。
【0445】
なお、実施の形態5で示したレンジ方向加速度利用型目標形状・角速度算出部17aと同様に、角速度
【0446】
【数181】
【0447】
について、その向きを表す単位ベクトル
【0448】
【数182】
【0449】
と角速度の大きさを表す
【0450】
【数183】
【0451】
を分離して推定する。また、角速度の変化率
【0452】
【数184】
【0453】
が、次の関係を満たすことに着目する。
【0454】
【数185】
【0455】
ここで、表記の都合上、
【0456】
【数186】
【0457】
と定義した。式(46)より、角速度の変化率
【0458】
【数187】
【0459】
については、向きを表す単位ベクトル
【0460】
【数188】
【0461】
の変化率
【0462】
【数189】
【0463】
と、角速度の大きさの変化率
【0464】
【数190】
【0465】
を分離して推定できることが分かる。
【0466】
図15は、上記の考え方に基づいて時変角速度考慮型目標形状・角速度算出部17cを構成した場合の構成図である。図15において、新たな符号として、17c−1は複数回転軸推定部、17c−2は平均回転軸・回転軸変化率推定部、17c−3は時変角速度考慮型角速度・反射点座標算出部であり、その他は図14と同様である。
【0467】
まず、複数回転軸推定部17c−1は、実施の形態5に示した回転軸推定部17a−1と同様に、反射点速度算出部16で算出された孤立反射点の速度ベクトル
【0468】
【数191】
【0469】
を用いて、回転軸の向きを複数回推定する。実施の形態5に示した回転軸推定部17a−1においては、n番目のフレームを中心とする近傍Nフレームの観測値を用いて推定した速度ベクトル
【0470】
【数192】
【0471】
を用いて、n番目のフレームの観測時における回転軸を推定していたが、本実施の形態における複数回転軸推定部17c−1は、n番目のフレーム以外にもn+i
【0472】
【数193】
【0473】
番目のフレームを中心としたNフレームの観測値を用いて、n+i番目のフレームの観測時における回転軸もそれぞれ求めるようにする。以下では、このようにして算出された回転軸の推定値を
【0474】
【数194】
【0475】
と表す。
【0476】
次いで、平均回転軸・回転軸変化率推定部17c−2は、
【0477】
【数195】
【0478】
の値を用いて、nフレーム目における回転軸の向きとその変化率を次式によって推定する。
【0479】
【数196】
【0480】
ここで、
【0481】
【数197】
【0482】
はそれぞれ、n番目のフレームにおける回転軸の向きとその変化率の推定値を表す。平均回転軸・回転軸変化率推定部17c−2は、上記のようにして推定された回転軸の向きとその変化率の推定値
【0483】
【数198】
【0484】
を出力する。
【0485】
次に、時変角速度考慮型角速度・反射点座標算出部17c−3においては、角速度の大きさ
【0486】
【数199】
【0487】
の値とその変化率
【0488】
【数200】
【0489】
の組を一つ仮定して、行列
【0490】
【数201】
【0491】
を与えた上で、式(44)を次の線形最小二乗法によって解く。
【0492】
【数202】
【0493】
このとき、孤立反射点の座標
【0494】
【数203】
【0495】
の推定値は仮定した角速度の大きさ
【0496】
【数204】
【0497】
の値とその変化率
【0498】
【数205】
【0499】
の値の関数であるから、
【0500】
【数206】
【0501】
と表記している。また、式(48)の最小二乗法による解における二乗誤差は次式で表される。
【0502】
【数207】
【0503】
次いで、時変角速度考慮型角速度・反射点座標算出部17c−3においては、角速度の大きさ
【0504】
【数208】
【0505】
の値とその変化率
【0506】
【数209】
【0507】
の組を、とりうる値の範囲で様々に仮定して、式(48)を解く。その上で、二乗誤差
【0508】
【数210】
【0509】
を最小にする
【0510】
【数211】
【0511】
の組と、そのときの孤立反射点の座標の推定値
【0512】
【数212】
【0513】
を最終的な推定値として出力する。このように構成することにより、解の探索は
【0514】
【数213】
【0515】
の組についてのみ実施すればよく、その他は線形最小二乗法によって求めることが可能である。
【0516】
以上のように、この発明の実施の形態7によれば、時変角速度考慮型目標形状・角速度算出部17cを備えるように構成したので、目標角速度が時変である場合についても、目標運動と目標形状を推定できる効果を奏する。このことは、観測時間を延長してより多数のフレーム数の動画を利用して目標形状を推定できることを示唆しており、目標形状の推定精度をさらに向上する効果をも奏する。
【0517】
加えて、時変角速度考慮型目標形状・角速度算出部17cが、複数回転軸推定部17c−1、平均回転軸・回転軸変化率推定部17c−2、時変角速度考慮型角速度・反射点座標算出部17c−3を備えるように構成したので、目標の運動と孤立反射点の座標の推定に用いる非線形最小二乗問題を効率良く解くことができる効果を奏する。
【符号の説明】
【0518】
1 送信機、2 送受切換器、3 送受信アンテナ、4,5 受信用補助アンテナ、6〜8 受信機、9 レーダ画像生成部、10 画像履歴蓄積部、11 目標運動・形状推定部、11a 相関動画像利用目標運動・形状推定部、11b ドップラー周波数変化率利用型目標運動・形状推定部、11c 位相差2次微分利用型目標運動・形状推定部、11d 時変角速度考慮型目標運動・形状推定部、12 反射点抽出部、13 フレーム間反射点対応部、14 位相差算出部、15 位相差変異算出部、15a 位相差変化率・2次微分算出部、16 反射点速度算出部、17 目標形状・角速度算出部、17a レンジ方向加速度利用型目標形状・角速度算出部、17a−1 回転軸推定部、17a−2 レンジ方向加速度利用型角速度・反射点座標算出部、17b 加速度利用型目標形状・角速度算出部、17b−1 回転軸推定部、17b−2 加速度利用型角速度・反射点座標算出部、17c 時変角速度考慮型目標形状・角速度算出部、17c−1 複数回転軸推定部、17c−2 平均回転軸・回転軸変化率推定部、17c−3 時変角速度考慮型角速度・反射点座標算出部、26 相関処理部、27 相関画像履歴蓄積部、28 相関画像反射点抽出部、29 形状推定可能性判定部、30 形状合成部、31 ドップラー周波数変化率算出部、32 反射点レンジ方向加速度算出部、32a 反射点加速度算出部。
【特許請求の範囲】
【請求項1】
目標に対して送信電波を照射する送信手段と、
前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用アンテナおよび受信機と、
前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部と、
前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段と
を備えた画像レーダ装置。
【請求項2】
請求項1に記載の画像レーダ装置において、
前記目標運動・形状推定手段は、
前記レーダ画像再生部において再生されたレーダ動画像の各フレームから、輝度の強い点の視線方向の位置とドップラー周波数および複素振幅の情報を抽出する反射点抽出手段と、
各フレームにおいて前記反射点抽出手段で抽出された点をフレーム間で対応付けるフレーム間反射点対応手段と、
異なる受信機で受信された信号に基づく動画像で観測された対応する点同士の前記複素振幅の位相差を算出する位相差算出手段と、
前記位相差算出手段において算出された位相差の変化率を算出する位相差変化率算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数および前記位相差変化率算出手段において算出された位相差の変化率を利用して、対応する反射点の速度を算出する反射点速度算出手段と、
前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度を利用して、目標の角速度および反射点の三次元の座標を算出する目標形状・角速度算出手段と
を有することを特徴とする画像レーダ装置。
【請求項3】
請求項1に記載の画像レーダ装置において、
前記レーダ画像再生部で連続的に再生された異なる受信機で受信された信号に基づき生成されたレーダ動画像間の画素ごとの相関を算出して相関動画像を得る相関処理部をさらに備え、
前記目標形状・角速度算出手段は、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像に対して、前記相関処理部で算出された相関動画像を用いて目標の運動及び形状を推定する相関動画像利用目標運動・形状推定手段でなる
ことを特徴とする画像レーダ装置。
【請求項4】
請求項3に記載の画像レーダ装置において、
前記相関動画像利用目標運動・形状推定手段は、
相関動画像の各フレームから、相関値の大きい点の視線方向の位置とドップラー周波数および複素振幅の情報を抽出する反射点抽出手段と、
各フレームにおいて前記反射点抽出手段で抽出された点をフレーム間で対応付けるフレーム間反射点対応手段と、
前記相関動画像における位相値として得られている位相差の変化率を算出する位相差変化率算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数および、前記位相差変化率算出手段において算出された位相差の変化率を利用して、対応する反射点の速度を算出する反射点速度算出手段と、
前記反射点抽出手段で抽出された点の視線方向の位置および、前記反射点速度算出手段において算出された反射点の速度を利用して、目標の角速度および反射点の三次元の座標を算出する目標形状・角速度算出手段と
を有することを特徴とする画像レーダ装置。
【請求項5】
請求項1から4までのいずれか1項に記載の画像レーダ装置において、
前記受信用アンテナは、送受信を兼ねる送受信用アンテナを1つ、受信用補助アンテナを2つ有し、送受信用アンテナと受信用補助アンテナのうち一つをつなぐ2本の基線ベクトルが互いに直交するようにして、3つのアンテナが配置されている
ことを特徴とする画像レーダ装置。
【請求項6】
請求項1から5までのいずれか1項に記載の画像レーダ装置において、
前記反射点速度算出手段において算出された各反射点の速度から、目標運動の回転軸の向きを推定することにより、現在の観測のジオメトリの条件で目標の三次元形状を推定できるか否かを判定する形状推定可能性判定手段をさらに備えた
ことを特徴とする画像レーダ装置。
【請求項7】
請求項6に記載の画像レーダ装置において、
前記形状推定可能性判定手段は、前記反射点速度算出手段において算出された各反射点の速度ベクトルの共分散行列を算出し、前記共分散行列を固有値展開した後、その最小固有値に対応する固有ベクトルの向きを目標運動の回転軸の向きと推定する
ことを特徴とする画像レーダ装置。
【請求項8】
請求項1から7までのいずれか1項に記載の画像レーダ装置において、
前記目標運動・形状推定部から出力される複数回の観測の実施に基づく複数の目標形状の推定結果を合成する形状合成手段をさらに備えた
ことを特徴とする画像レーダ装置。
【請求項9】
請求項8に記載の画像レーダ装置において、
前記形状合成手段は、遮蔽による形状の欠損を補うために、異なる方向からの観測結果から推定された形状を重畳する
ことを特徴とする画像レーダ装置。
【請求項10】
請求項8に記載の画像レーダ装置において、
前記形状合成手段は、形状の推定精度を向上するために、複数の観測結果の平均処理を実施する
ことを特徴とする画像レーダ装置。
【請求項11】
請求項1から10までのいずれか1項に記載の画像レーダ装置において、
前記位相差変化率算出手段は、複数フレームにおいて算出された位相差の値に対して最小二乗法によって直線あてはめを行うことによって、位相差変化率を算出する
ことを特徴とする画像レーダ装置。
【請求項12】
請求項1から10までのいずれか1項に記載の画像レーダ装置において、
前記位相差変化率算出手段は、複数フレームにおいて算出された位相差の値に対して、前記反射点抽出手段で抽出された、対応する点の複素振幅から算出された反射強度の情報を用いて重み付けを行うことにより、重み付け最小二乗法によって直線あてはめを行うことによって位相差変化率を算出する
ことを特徴とする画像レーダ装置。
【請求項13】
請求項1から12までのいずれか1項に記載の画像レーダ装置において、
前記目標形状・角速度算出部は、前記反射点抽出手段で抽出された3個以上の点のドップラー周波数および前記位相差変化率算出手段において算出された位相差の変化率を利用して、最小二乗法によって目標の角速度および反射点の三次元の座標を算出する
ことを特徴とする画像レーダ装置。
【請求項14】
請求項1から12までのいずれか1項に記載の画像レーダ装置において、
前記目標形状・角速度算出部は、前記反射点抽出手段で抽出された3個以上の点のドップラー周波数および前記位相差変化率算出手段において算出された位相差の変化率を利用して、さらに、前記反射点抽出手段で抽出された、対応する点の複素振幅から算出された反射強度の情報を用いて重み付けを行うことにより、重み付け最小二乗法によって目標の角速度および反射点の三次元の座標を算出する
ことを特徴とする画像レーダ装置。
【請求項15】
請求項1に記載の画像レーダ装置において、
前記目標運動・形状推定手段は、目標形状および角速度の推定に、ドップラー周波数の変化率の情報を用いるドップラー周波数変化率利用型目標運動・形状推定手段でなり、
前記ドップラー周波数変化率利用型目標運動・形状推定手段は、
前記レーダ画像再生部において再生されたレーダ動画像の各フレームから、輝度の強い点の視線方向の位置とドップラー周波数および複素振幅の情報を抽出する反射点抽出手段と、
各フレームにおいて前記反射点抽出手段で抽出された点をフレーム間で対応付けるフレーム間反射点対応手段と、
異なる受信機で受信された信号に基づく動画像で観測された対応する点同士の前記複素振幅の位相差を算出する位相差算出手段と、
前記位相差算出手段において算出された位相差の変化率を算出する位相差変化率算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数および前記位相差変化率算出手段において算出された位相差の変化率を利用して、対応する反射点の速度を算出する反射点速度算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数の変化率を算出するドップラー周波数変化率算出手段と、
前記ドップラー周波数変化率算出手段で算出されたドップラー周波数の変化率を、レンジ方向の加速度に換算する反射点レンジ方向加速度算出手段と、
前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度および前記反射点レンジ方向加速度算出手段において算出された反射点のレンジ方向の加速度を利用して、目標の角速度および反射点の三次元の座標を算出するレンジ方向加速度利用型目標形状・角速度算出手段と
を有することを特徴とする画像レーダ装置。
【請求項16】
請求項15に記載の画像レーダ装置において、
前記レンジ方向加速度利用型目標形状・角速度算出手段は、
前記反射点速度算出部において算出された反射点の速度の集合の共分散行列を固有値分解して、最小固有値に対応する固有ベクトルを算出し、同固有ベクトルの向きを目標回転運動の回転軸方向の推定値として出力する回転軸推定手段と、
前記回転軸推定手段によって算出された回転軸方向の推定値と、前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度および前記反射点レンジ方向加速度算出手段において算出された反射点のレンジ方向の加速度とを利用して、角速度の大きさをパラメ−タとしつつ線形最小二乗法によって反射点の三次元の座標の推定値を算出することを繰り返し、推定誤差を最小とする角速度の大きさと、反射点の三次元の座標の推定値を出力するレンジ方向加速度利用型角速度・反射点座標算出部と
を有することを特徴とする画像レーダ装置。
【請求項17】
請求項1に記載の画像レーダ装置において、
前記目標運動・形状推定手段は、目標形状および角速度の推定に、位相差の2次微分成分の情報を用いる位相差2次微分利用型目標運動・形状推定手段でなり、
前記位相差2次微分利用型目標運動・形状推定手段は、
前記レーダ画像再生部において再生されたレーダ動画像の各フレームから、輝度の強い点の視線方向の位置とドップラー周波数および複素振幅の情報を抽出する反射点抽出手段と、
各フレームにおいて前記反射点抽出手段で抽出された点をフレーム間で対応付けるフレーム間反射点対応手段と、
異なる受信機で受信された信号に基づく動画像で観測された対応する点同士の前記複素振幅の位相差を算出する位相差算出手段と、
前記位相差算出手段において算出された位相差の変化率および2次微分成分を算出する位相差変化率・2次微分算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数および前記位相差変化率・2次微分算出手段において算出された位相差の変化率を利用して、対応する反射点の速度を算出する反射点速度算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数の変化率を算出するドップラー周波数変化率算出手段と、
前記ドップラー周波数変化率算出手段で算出されたドップラー周波数の変化率と、前記位相差変化率・2次微分算出手段において算出された位相差の2次微分成分を利用して反射点の加速度を推定する反射点加速度算出手段と、
前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度および前記反射点加速度算出手段において算出された反射点の加速度を利用して、目標の角速度および反射点の三次元の座標を算出する加速度利用型目標形状・角速度算出手段と
を有することを特徴とする画像レーダ装置。
【請求項18】
請求項17に記載の画像レーダ装置において、
前記加速度利用型目標形状・角速度算出手段は、
前記反射点速度算出部において算出された反射点の速度の集合の共分散行列を固有値分解して、最小固有値に対応する固有ベクトルを算出し、同固有ベクトルの向きを目標回転運動の回転軸方向の推定値として出力する回転軸推定手段と、
前記回転軸推定手段によって算出された回転軸方向の推定値と、前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度および前記反射点加速度算出手段において算出された反射点の加速度とを利用して、角速度の大きさをパラメ−タとしつつ線形最小二乗法によって反射点の三次元の座標の推定値を算出することを繰り返し、推定誤差を最小とする角速度の大きさと、反射点の三次元の座標の推定値を出力する加速度利用型角速度・反射点座標算出部と
を有することを特徴とする画像レーダ装置。
【請求項19】
請求項1に記載の画像レーダ装置において、
前記目標運動・形状推定手段は、目標形状および角速度の推定に、角速度が時間の関数であることを想定する時変角速度考慮型目標運動・形状推定手段でなり、
前記時変角速度考慮型目標運動・形状推定手段は、
前記レーダ画像再生部において再生されたレーダ動画像の各フレームから、輝度の強い点の視線方向の位置とドップラー周波数および複素振幅の情報を抽出する反射点抽出手段と、
各フレームにおいて前記反射点抽出手段で抽出された点をフレーム間で対応付けるフレーム間反射点対応手段と、
異なる受信機で受信された信号に基づく動画像で観測された対応する点同士の前記複素振幅の位相差を算出する位相差算出手段と、
前記位相差算出手段において算出された位相差の変化率および2次微分成分を算出する位相差変化率・2次微分算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数および前記位相差変化率・2次微分算出手段において算出された位相差の変化率を利用して、対応する反射点の速度を算出する反射点速度算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数の変化率を算出するドップラー周波数変化率算出手段と、
前記ドップラー周波数変化率算出手段で算出されたドップラー周波数の変化率と、前記位相差変化率・2次微分算出手段において算出された位相差の2次微分成分を利用して反射点の加速度を推定する反射点加速度算出手段と、
前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度および前記反射点加速度算出手段において算出された反射点の加速度を利用して、目標の角速度および反射点の三次元の座標を算出する時変角速度考慮型目標形状・角速度算出手段と
を有することを特徴とする画像レーダ装置。
【請求項20】
請求項19に記載の画像レーダ装置において、
前記時変角速度考慮型目標形状・角速度算出手段は、
前記反射点速度算出部において算出された反射点の速度の集合の共分散行列を固有値分解して、最小固有値に対応する固有ベクトルを算出し、同固有ベクトルの向きを目標回転運動の回転軸方向の推定値として出力することを複数回繰り返す複数回転軸推定手段と、
前記複数回転軸推定手段によって算出された複数の回転軸方向の推定値から、中心時刻における回転軸方向および回転軸変化率を推定する平均回転軸・回転軸変化率推定手段と、
前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度および前記反射点加速度算出手段において算出された反射点の加速度と前記平均回転軸・回転軸変化率推定手段において算出された回転軸方向および回転軸変化率を利用して、角速度の大きさおよび角速度の大きさの変化率をパラメ−タとしつつ線形最小二乗法によって反射点の三次元の座標の推定値を算出することを繰り返し、このときの推定誤差を最小とする角速度の大きさと角速度の大きさの変化率と、そのときの反射点の三次元の座標の推定値を出力する時変角速度考慮型角速度・反射点座標算出部と
を有することを特徴とする画像レーダ装置。
【請求項1】
目標に対して送信電波を照射する送信手段と、
前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用アンテナおよび受信機と、
前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部と、
前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段と
を備えた画像レーダ装置。
【請求項2】
請求項1に記載の画像レーダ装置において、
前記目標運動・形状推定手段は、
前記レーダ画像再生部において再生されたレーダ動画像の各フレームから、輝度の強い点の視線方向の位置とドップラー周波数および複素振幅の情報を抽出する反射点抽出手段と、
各フレームにおいて前記反射点抽出手段で抽出された点をフレーム間で対応付けるフレーム間反射点対応手段と、
異なる受信機で受信された信号に基づく動画像で観測された対応する点同士の前記複素振幅の位相差を算出する位相差算出手段と、
前記位相差算出手段において算出された位相差の変化率を算出する位相差変化率算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数および前記位相差変化率算出手段において算出された位相差の変化率を利用して、対応する反射点の速度を算出する反射点速度算出手段と、
前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度を利用して、目標の角速度および反射点の三次元の座標を算出する目標形状・角速度算出手段と
を有することを特徴とする画像レーダ装置。
【請求項3】
請求項1に記載の画像レーダ装置において、
前記レーダ画像再生部で連続的に再生された異なる受信機で受信された信号に基づき生成されたレーダ動画像間の画素ごとの相関を算出して相関動画像を得る相関処理部をさらに備え、
前記目標形状・角速度算出手段は、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像に対して、前記相関処理部で算出された相関動画像を用いて目標の運動及び形状を推定する相関動画像利用目標運動・形状推定手段でなる
ことを特徴とする画像レーダ装置。
【請求項4】
請求項3に記載の画像レーダ装置において、
前記相関動画像利用目標運動・形状推定手段は、
相関動画像の各フレームから、相関値の大きい点の視線方向の位置とドップラー周波数および複素振幅の情報を抽出する反射点抽出手段と、
各フレームにおいて前記反射点抽出手段で抽出された点をフレーム間で対応付けるフレーム間反射点対応手段と、
前記相関動画像における位相値として得られている位相差の変化率を算出する位相差変化率算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数および、前記位相差変化率算出手段において算出された位相差の変化率を利用して、対応する反射点の速度を算出する反射点速度算出手段と、
前記反射点抽出手段で抽出された点の視線方向の位置および、前記反射点速度算出手段において算出された反射点の速度を利用して、目標の角速度および反射点の三次元の座標を算出する目標形状・角速度算出手段と
を有することを特徴とする画像レーダ装置。
【請求項5】
請求項1から4までのいずれか1項に記載の画像レーダ装置において、
前記受信用アンテナは、送受信を兼ねる送受信用アンテナを1つ、受信用補助アンテナを2つ有し、送受信用アンテナと受信用補助アンテナのうち一つをつなぐ2本の基線ベクトルが互いに直交するようにして、3つのアンテナが配置されている
ことを特徴とする画像レーダ装置。
【請求項6】
請求項1から5までのいずれか1項に記載の画像レーダ装置において、
前記反射点速度算出手段において算出された各反射点の速度から、目標運動の回転軸の向きを推定することにより、現在の観測のジオメトリの条件で目標の三次元形状を推定できるか否かを判定する形状推定可能性判定手段をさらに備えた
ことを特徴とする画像レーダ装置。
【請求項7】
請求項6に記載の画像レーダ装置において、
前記形状推定可能性判定手段は、前記反射点速度算出手段において算出された各反射点の速度ベクトルの共分散行列を算出し、前記共分散行列を固有値展開した後、その最小固有値に対応する固有ベクトルの向きを目標運動の回転軸の向きと推定する
ことを特徴とする画像レーダ装置。
【請求項8】
請求項1から7までのいずれか1項に記載の画像レーダ装置において、
前記目標運動・形状推定部から出力される複数回の観測の実施に基づく複数の目標形状の推定結果を合成する形状合成手段をさらに備えた
ことを特徴とする画像レーダ装置。
【請求項9】
請求項8に記載の画像レーダ装置において、
前記形状合成手段は、遮蔽による形状の欠損を補うために、異なる方向からの観測結果から推定された形状を重畳する
ことを特徴とする画像レーダ装置。
【請求項10】
請求項8に記載の画像レーダ装置において、
前記形状合成手段は、形状の推定精度を向上するために、複数の観測結果の平均処理を実施する
ことを特徴とする画像レーダ装置。
【請求項11】
請求項1から10までのいずれか1項に記載の画像レーダ装置において、
前記位相差変化率算出手段は、複数フレームにおいて算出された位相差の値に対して最小二乗法によって直線あてはめを行うことによって、位相差変化率を算出する
ことを特徴とする画像レーダ装置。
【請求項12】
請求項1から10までのいずれか1項に記載の画像レーダ装置において、
前記位相差変化率算出手段は、複数フレームにおいて算出された位相差の値に対して、前記反射点抽出手段で抽出された、対応する点の複素振幅から算出された反射強度の情報を用いて重み付けを行うことにより、重み付け最小二乗法によって直線あてはめを行うことによって位相差変化率を算出する
ことを特徴とする画像レーダ装置。
【請求項13】
請求項1から12までのいずれか1項に記載の画像レーダ装置において、
前記目標形状・角速度算出部は、前記反射点抽出手段で抽出された3個以上の点のドップラー周波数および前記位相差変化率算出手段において算出された位相差の変化率を利用して、最小二乗法によって目標の角速度および反射点の三次元の座標を算出する
ことを特徴とする画像レーダ装置。
【請求項14】
請求項1から12までのいずれか1項に記載の画像レーダ装置において、
前記目標形状・角速度算出部は、前記反射点抽出手段で抽出された3個以上の点のドップラー周波数および前記位相差変化率算出手段において算出された位相差の変化率を利用して、さらに、前記反射点抽出手段で抽出された、対応する点の複素振幅から算出された反射強度の情報を用いて重み付けを行うことにより、重み付け最小二乗法によって目標の角速度および反射点の三次元の座標を算出する
ことを特徴とする画像レーダ装置。
【請求項15】
請求項1に記載の画像レーダ装置において、
前記目標運動・形状推定手段は、目標形状および角速度の推定に、ドップラー周波数の変化率の情報を用いるドップラー周波数変化率利用型目標運動・形状推定手段でなり、
前記ドップラー周波数変化率利用型目標運動・形状推定手段は、
前記レーダ画像再生部において再生されたレーダ動画像の各フレームから、輝度の強い点の視線方向の位置とドップラー周波数および複素振幅の情報を抽出する反射点抽出手段と、
各フレームにおいて前記反射点抽出手段で抽出された点をフレーム間で対応付けるフレーム間反射点対応手段と、
異なる受信機で受信された信号に基づく動画像で観測された対応する点同士の前記複素振幅の位相差を算出する位相差算出手段と、
前記位相差算出手段において算出された位相差の変化率を算出する位相差変化率算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数および前記位相差変化率算出手段において算出された位相差の変化率を利用して、対応する反射点の速度を算出する反射点速度算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数の変化率を算出するドップラー周波数変化率算出手段と、
前記ドップラー周波数変化率算出手段で算出されたドップラー周波数の変化率を、レンジ方向の加速度に換算する反射点レンジ方向加速度算出手段と、
前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度および前記反射点レンジ方向加速度算出手段において算出された反射点のレンジ方向の加速度を利用して、目標の角速度および反射点の三次元の座標を算出するレンジ方向加速度利用型目標形状・角速度算出手段と
を有することを特徴とする画像レーダ装置。
【請求項16】
請求項15に記載の画像レーダ装置において、
前記レンジ方向加速度利用型目標形状・角速度算出手段は、
前記反射点速度算出部において算出された反射点の速度の集合の共分散行列を固有値分解して、最小固有値に対応する固有ベクトルを算出し、同固有ベクトルの向きを目標回転運動の回転軸方向の推定値として出力する回転軸推定手段と、
前記回転軸推定手段によって算出された回転軸方向の推定値と、前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度および前記反射点レンジ方向加速度算出手段において算出された反射点のレンジ方向の加速度とを利用して、角速度の大きさをパラメ−タとしつつ線形最小二乗法によって反射点の三次元の座標の推定値を算出することを繰り返し、推定誤差を最小とする角速度の大きさと、反射点の三次元の座標の推定値を出力するレンジ方向加速度利用型角速度・反射点座標算出部と
を有することを特徴とする画像レーダ装置。
【請求項17】
請求項1に記載の画像レーダ装置において、
前記目標運動・形状推定手段は、目標形状および角速度の推定に、位相差の2次微分成分の情報を用いる位相差2次微分利用型目標運動・形状推定手段でなり、
前記位相差2次微分利用型目標運動・形状推定手段は、
前記レーダ画像再生部において再生されたレーダ動画像の各フレームから、輝度の強い点の視線方向の位置とドップラー周波数および複素振幅の情報を抽出する反射点抽出手段と、
各フレームにおいて前記反射点抽出手段で抽出された点をフレーム間で対応付けるフレーム間反射点対応手段と、
異なる受信機で受信された信号に基づく動画像で観測された対応する点同士の前記複素振幅の位相差を算出する位相差算出手段と、
前記位相差算出手段において算出された位相差の変化率および2次微分成分を算出する位相差変化率・2次微分算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数および前記位相差変化率・2次微分算出手段において算出された位相差の変化率を利用して、対応する反射点の速度を算出する反射点速度算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数の変化率を算出するドップラー周波数変化率算出手段と、
前記ドップラー周波数変化率算出手段で算出されたドップラー周波数の変化率と、前記位相差変化率・2次微分算出手段において算出された位相差の2次微分成分を利用して反射点の加速度を推定する反射点加速度算出手段と、
前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度および前記反射点加速度算出手段において算出された反射点の加速度を利用して、目標の角速度および反射点の三次元の座標を算出する加速度利用型目標形状・角速度算出手段と
を有することを特徴とする画像レーダ装置。
【請求項18】
請求項17に記載の画像レーダ装置において、
前記加速度利用型目標形状・角速度算出手段は、
前記反射点速度算出部において算出された反射点の速度の集合の共分散行列を固有値分解して、最小固有値に対応する固有ベクトルを算出し、同固有ベクトルの向きを目標回転運動の回転軸方向の推定値として出力する回転軸推定手段と、
前記回転軸推定手段によって算出された回転軸方向の推定値と、前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度および前記反射点加速度算出手段において算出された反射点の加速度とを利用して、角速度の大きさをパラメ−タとしつつ線形最小二乗法によって反射点の三次元の座標の推定値を算出することを繰り返し、推定誤差を最小とする角速度の大きさと、反射点の三次元の座標の推定値を出力する加速度利用型角速度・反射点座標算出部と
を有することを特徴とする画像レーダ装置。
【請求項19】
請求項1に記載の画像レーダ装置において、
前記目標運動・形状推定手段は、目標形状および角速度の推定に、角速度が時間の関数であることを想定する時変角速度考慮型目標運動・形状推定手段でなり、
前記時変角速度考慮型目標運動・形状推定手段は、
前記レーダ画像再生部において再生されたレーダ動画像の各フレームから、輝度の強い点の視線方向の位置とドップラー周波数および複素振幅の情報を抽出する反射点抽出手段と、
各フレームにおいて前記反射点抽出手段で抽出された点をフレーム間で対応付けるフレーム間反射点対応手段と、
異なる受信機で受信された信号に基づく動画像で観測された対応する点同士の前記複素振幅の位相差を算出する位相差算出手段と、
前記位相差算出手段において算出された位相差の変化率および2次微分成分を算出する位相差変化率・2次微分算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数および前記位相差変化率・2次微分算出手段において算出された位相差の変化率を利用して、対応する反射点の速度を算出する反射点速度算出手段と、
前記反射点抽出手段で抽出された点のドップラー周波数の変化率を算出するドップラー周波数変化率算出手段と、
前記ドップラー周波数変化率算出手段で算出されたドップラー周波数の変化率と、前記位相差変化率・2次微分算出手段において算出された位相差の2次微分成分を利用して反射点の加速度を推定する反射点加速度算出手段と、
前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度および前記反射点加速度算出手段において算出された反射点の加速度を利用して、目標の角速度および反射点の三次元の座標を算出する時変角速度考慮型目標形状・角速度算出手段と
を有することを特徴とする画像レーダ装置。
【請求項20】
請求項19に記載の画像レーダ装置において、
前記時変角速度考慮型目標形状・角速度算出手段は、
前記反射点速度算出部において算出された反射点の速度の集合の共分散行列を固有値分解して、最小固有値に対応する固有ベクトルを算出し、同固有ベクトルの向きを目標回転運動の回転軸方向の推定値として出力することを複数回繰り返す複数回転軸推定手段と、
前記複数回転軸推定手段によって算出された複数の回転軸方向の推定値から、中心時刻における回転軸方向および回転軸変化率を推定する平均回転軸・回転軸変化率推定手段と、
前記反射点抽出手段で抽出された点の視線方向の位置および前記反射点速度算出手段において算出された反射点の速度および前記反射点加速度算出手段において算出された反射点の加速度と前記平均回転軸・回転軸変化率推定手段において算出された回転軸方向および回転軸変化率を利用して、角速度の大きさおよび角速度の大きさの変化率をパラメ−タとしつつ線形最小二乗法によって反射点の三次元の座標の推定値を算出することを繰り返し、このときの推定誤差を最小とする角速度の大きさと角速度の大きさの変化率と、そのときの反射点の三次元の座標の推定値を出力する時変角速度考慮型角速度・反射点座標算出部と
を有することを特徴とする画像レーダ装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2010−14700(P2010−14700A)
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願番号】特願2009−35619(P2009−35619)
【出願日】平成21年2月18日(2009.2.18)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年1月21日(2010.1.21)
【国際特許分類】
【出願日】平成21年2月18日(2009.2.18)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]