
眼科装置
【課題】 患者眼に対してレーザ光を適切に照射する。
【解決手段】 患者眼に向けて角膜手術用のレーザ光を照射するレーザ照射光学系を備え、レーザ照射光学系が持つ基準軸を患者眼に対して所期する位置関係にアライメントしてレーザ照射する眼科装置において、患者眼に対するレーザ照射光学系の傾き及び位置を変化させる移動手段と、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段と、眼検出手段による検出結果に基づいてレーザ照射光学系の基準軸が患者眼に対して所期するアライメント状態となるように移動手段を制御する制御手段と、を備える。
【解決手段】 患者眼に向けて角膜手術用のレーザ光を照射するレーザ照射光学系を備え、レーザ照射光学系が持つ基準軸を患者眼に対して所期する位置関係にアライメントしてレーザ照射する眼科装置において、患者眼に対するレーザ照射光学系の傾き及び位置を変化させる移動手段と、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段と、眼検出手段による検出結果に基づいてレーザ照射光学系の基準軸が患者眼に対して所期するアライメント状態となるように移動手段を制御する制御手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、眼を観察する顕微鏡を備える眼科装置及び患者眼にレーザ照射する眼科装置に関する。
【背景技術】
【0002】
従来、眼を観察するための顕微鏡を3次元で任意の位置及び方向に向けることが可能な手術顕微鏡は、それぞれの移動や向きを変更するための専用の軸を備える構成であった(例えば、特許文献1参照)。
また、屈折矯正手術のために角膜切除用のレーザ照射光学系を組み込んだ眼科装置においては、眼を観察しながらレーザ照射することが必要なため、レーザ照射端を顕微鏡下に設けている(例えば、特許文献2参照)。この装置においては、レーザ照射端を移動するために、水平移動可能なスライドアームと、上下移動可能なアーム先端部を備え、アーム先端部に顕微鏡が配置されている。この装置においては、顕微鏡及びレーザ照射端の自由度は水平方向と上下方向の3軸方向である。
【特許文献1】特開2003−111776号公報
【特許文献2】特開平9−149914号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、従来装置には次のような問題があった。特許文献2のようにレーザ照射光学系を組み込んだ装置では、眼の傾き方向に合わせて顕微鏡やレーザ照射光学系の向きを変えることができず、角膜の一定位置を基準にしたレーザ照射が難しい問題があった。また、手術に際して、初めに患者の顔の位置を正して、観察位置や手術状態を決めたとしても、手術中に顔の姿勢を維持できず、顔が動いてしまう患者も少なくない。顔が傾くと、眼も傾く。手術中に眼が動くと、手術を中断して顕微鏡を動かすか、患者の顔をもう一度動かす等の処置が必要で、スムーズな手術が行えない。また、視線が定まらずに眼転を起こす患者も少なくない。
観察に必要な患部を常に目標に捕らえて、顕微鏡及びレーザ照射端を遠隔操作により追従させるためには、特許文献1のように1軸ずつ直列に顕微鏡を固定する機構では剛性確保が難しい。遠隔操作で各軸を移動制御するための駆動源をそれぞれの軸近辺に配置する必要があり、軸数が増えるに従い機構が複雑になり、重量も重くなる。このため、顕微鏡やレーザ照射端の位置決めが難しい問題があった。
【0004】
本発明は、上記従来技術の問題点に鑑み、患者眼に対してレーザ光を適切に照射できる眼科装置を提供することを技術課題とする。また、患者眼を適切に観察するための顕微鏡の位置決めが容易に行える眼科装置を提供することを技術課題とする。
【課題を解決するための手段】
【0005】
本発明は、上記課題を解決するために、次のような構成を備えることを特徴とする。
【0006】
(1) 患者眼に向けて角膜手術用のレーザ光を照射するレーザ照射光学系を備え、レーザ照射光学系が持つ基準軸を患者眼に対して所期する位置関係にアライメントしてレーザ照射する眼科装置において、患者眼に対する前記レーザ照射光学系の傾き及び位置を変化させる移動手段と、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、該第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段と、該眼検出手段による検出結果に基づいて前記レーザ照射光学系の基準軸が患者眼に対して所期するアライメント状態となるように前記移動手段を制御する制御手段と、を備えることを特徴とする。
(2) (1)の眼科装置において、前記眼検出手段は前記第1撮像手段及び第2撮像手段によりそれぞれ撮像された前眼部画像を処理して瞳孔形状を求め、所期するアライメント状態に対する瞳孔形状の変形に基づいて患者眼の傾きを検出することを特徴とする。
(3) (2)の眼科装置において、前記眼検出手段は、それぞれ得られた瞳孔形状の瞳孔中心を基準にした少なくとも2方向の瞳孔形状の寸法比を基に患者眼の傾きを検出することを特徴とする。
(4) (2)の眼科装置において、前記第1撮像手段及び第2撮像手段のそれぞれの撮像光軸は、前記基準軸に対して異なる方向に傾斜して配置され、前記眼検出手段は、それぞれ得られた瞳孔形状の変形方向を基に患者眼の傾きを検出することを特徴とする。
(5) (4)の眼科装置において、前記眼検出手段は、それぞれ得られた瞳孔形状について、複数ラインの水平走査又は複数ラインの垂直走査で得られる瞳孔エッジの中点位置に基づいて瞳孔形状の変形方向を求めることを特徴とする。
(6) (1)の眼科装置において、前記制御手段は、所期するアライメント状態で前記眼検出手段により得られた患者眼の傾き及び位置に対して、レーザ照射時に前記眼検出手段により得られる患者眼の傾き及び位置の変化に基づいて前記移動手段を制御することを特徴とする。
(7) (1)の眼科装置において、前記移動手段は、前記レーザ照射光学系を支持すると共に各支持位置を個別に変えられる少なくとも6本の制御棒と、各制御棒を駆動する駆動源と、を持つパラレルリンク機構を備えることを特徴とする。
(8) 患者眼に向けて角膜手術用のレーザ光を照射するレーザ照射光学系を備え、レーザ照射光学系が持つ基準軸を患者眼に対して所期する位置関係にアライメントしてレーザ照射する眼科装置において、患者眼に対する前記レーザ照射光学系の傾き及び位置を変化させる移動手段と、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、該第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段と、該眼検出手段により検出された患者眼の傾き及び位置の情報を表示する表示手段と、を備えることを特徴とする。
(9) 患者眼を観察するための顕微鏡と、該顕微鏡が配置された移動部を支持すると共に各支持位置を個別に変えられる少なくとも6本の制御棒と各制御棒を駆動する駆動源とを持ち,前記顕微鏡の傾き及び位置を変化させるパラレルリンク機構と、前記顕微鏡の位置及び傾きを変化させるための信号を入力する入力手段と、該入力信号に基づいて前記パラレルリンク機構の動作を制御する制御手段と、を備えることを特徴とする。
(10) (9)の眼科装置において、前記パラレルリンク機構が持つ少なくとも6本の制御棒は、屈曲角度又は伸縮を変えられる制御棒であることを特徴とする。
(11) (9)の制御手段は、前記入力手段により傾き角を変更する信号が入力された場合、前記顕微鏡が持つ対物レンズの光軸上の所定位置を基準点として前記顕微鏡を傾けると共に、前記基準点と対物レンズとの距離を保持するように前記パラレルリンク機構の動作を制御することを特徴とする。
(12) (9)の眼科装置において、患者眼を撮像するために前記移動部に配置された撮像手段を持ち,該撮像手段による眼画像を処理して患者眼の傾きを含むアライメント状態を検出する眼検出手段をさらに備え、前記制御手段は前記眼検出手段の検出結果に基づいて、前記顕微鏡が患者眼に対して所期する位置関係となるように前記パラレルリンク機構の動作を制御することを特徴とする。
(13) (12)の制御手段は、前記眼検出手段の検出結果に基づいて、前記顕微鏡の傾き及び位置きが患者眼の動きに追尾するように前記パラレルリンク機構の動作を制御することを特徴とする。
(14) (9)の眼科装置において、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、該第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段とを備え、前記制御手段は前記眼検出手段の検出結果に基づいて、前記顕微鏡が患者眼に対して所期するアライメント状態となるように前記パラレルリンク機構の動作を制御することを特徴とする。
【発明の効果】
【0007】
本発明によれば、患者眼に対してレーザ光を適切に照射できる。また、患者眼を適切に観察するための顕微鏡の位置決めが容易に行える。
【発明を実施するための最良の形態】
【0008】
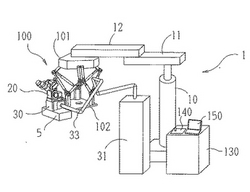
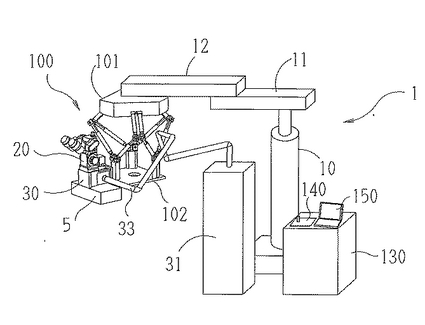
以下、本発明の実施の形態を図面に基づいて説明する。図1は、手術顕微鏡及びレーザ照射ユニットを備える眼科装置の全体の概略構成図である。
【0009】
図1において、手術顕微鏡1は支柱脚10の上部に設けられた第1水平関節アーム11及び第2水平関節アーム12を備え、第2水平関節アームはパラレルリンク機構100の固定部101を保持する。この例ではパラレルリンク機構100を粗く移動するために2つの水平関節アームとしているが、垂直関節アームやその複合タイプであっても良い。パラレルリンク機構100は、6本の制御棒111〜116(図2参照)より移動部102を固定部101に対して移動可能に支持している。移動部102には、顕微鏡20とレーザ照射端ユニット30が配置されている。パラレルリンク機構100により移動部102に設けられた顕微鏡20,ユニット30の位置及び傾きが任意に変えられる。130はパラレルリンク機構100等を制御する制御ユニットである。140はパラレルリンク機構100を動作させるための操作信号を入力する遠隔操作用の操作パネルである。
【0010】
また、この眼科装置では、顕微鏡20の下にレーザ照射端ユニット30が配置され、レーザ装置本体31から角膜切除用の治療レーザ光(例えば、エキシマレーザ光)が多間接アーム33を介してレーザ照射端ユニット30に導光される。多間接アーム33の各関節部には治療レーザ光を反射させるミラーが配置されており、多間接アーム33の先端部は任意の動きに追従可能となっている。レーザ装置本体31からレーザ照射端ユニット30までのレーザ光の導光は、移動部102の任意の動きに追従できる導光体であれば良く、光ファイバを用いても良い。レーザ照射端ユニット30の下には、照明ユニット5が配置されている。
【0011】
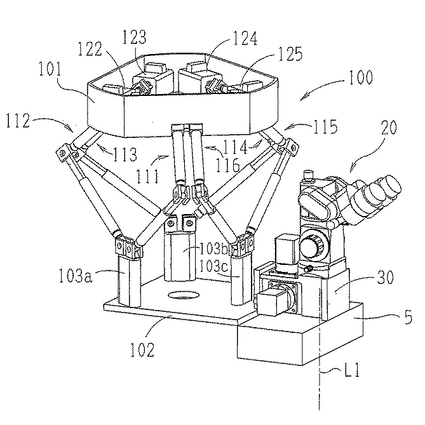
次に、パラレルリンク機構100の構成を、図2及ぶ図3により説明する。図2はパラレルリンク機構100の全体及び顕微鏡20等の配置状態を示す斜視図である。図2において、パラレルリンク機構100は、固定部101に対して移動部102の位置及び傾きを変えるための6本の制御棒111,112,113,114,115,116を備える。この制御棒111〜116をそれぞれ駆動するための駆動源であるモータ121〜126は、固定部101に配置されている(図1では、モータ121、126の図示を略している)。
【0012】
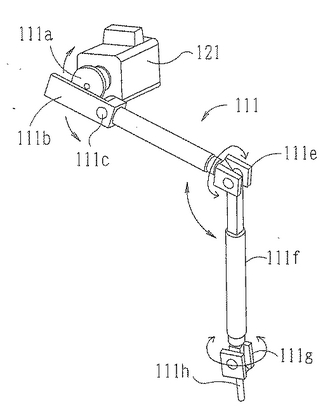
図3は、1本の制御棒111の構成を説明する図である。モータ121の回転軸には偏心カム111aが取り付けられている。この偏心カム111aの回転により、制御棒111の基部111bは、固定部101に保持されている中心軸111cを中心に垂直面で回転可能となっている。基部111bには第1駆動軸111dが取り付けられ、第1駆動軸111dの先端には、その軸周りに回転可能な第1軸受け111eが取り付けられている。第1軸受け111eには、第1駆動軸111dに対して屈曲角度を変更可能に第2駆動軸111fが設けられている。さらに、第2駆動軸111fの先端には、その軸周りに回転可能な第2軸受け111gが取り付けられている。第2軸受け111gには、第2駆動軸111fに対して角度を変更可能に軸111hが取り付けられている。そして、軸111hは移動部102に固定された支持ブロック103aに取り付けられている。
【0013】
他の制御棒112〜116についても、制御棒111と同様な構成である。制御棒112は支持ブロック103aに取り付けられ、制御棒113及び114は支持ブロック103bに取り付けられ、制御棒115及び116は支持ブロック103cに取り付けられている。制御棒111〜116にそれぞれ対応して固定部101に設けられたモータ121〜126を同時に制御することにより、移動部102に配置された顕微鏡20の位置及び傾きが任意に変更可能とされる。なお、顕微鏡20は、レーザ照射端ユニット30を介して移動部102に取り付けられている。
【0014】
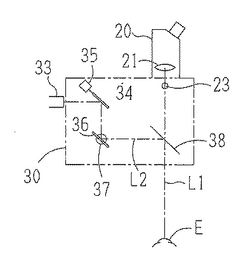
図4は、レーザ照射端ユニット30に配置されるレーザ照射光学系の概略構成図である。多間接アーム33から出力されたレーザ光は、スキャニングミラーとしての第1ガルバノミラー34、第2ガルバノミラー36によって2次元的にスキャニングされる。顕微鏡20の対物レンズ21と患者眼Eの間には、角膜切除用のレーザ光を反射し、可視の観察光を透過するダイクロイックミラー38が配置されている。ダイクロイックミラー38により、照射光学系の基準光軸L2は対物レンズ21の光軸L1と同軸にされる。また、対物レンズ21の光軸L1上には、固視灯23が配置されており、手術時には固視灯23を患者眼Eに固視させる。
【0015】
多間接アーム33から出射した小径スポットのレーザ光は、ガルバノミラー34,36により患者眼Eの角膜上で2次元的にスキャンされる。角膜上に照射されるレーザ光のスポット径は、好ましくは0.1〜1mm程である。レーザ光は中心部から周辺部に行くに従って徐々にエネルギ密度が低くなるビームである。この小スポットのレーザ光を角膜上で2次元的にスキャニングし、レーザ光を重ね合わせることにより角膜形状を任意の形状に切除できる。屈折矯正手術では、小スポットのレーザ光の重ね合わせにより、角膜曲率を変化させる。
【0016】
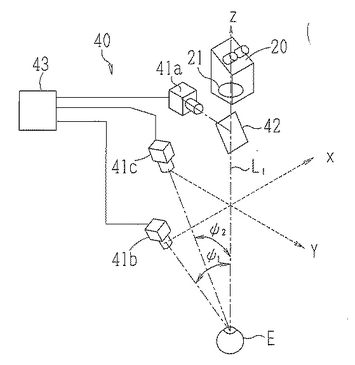
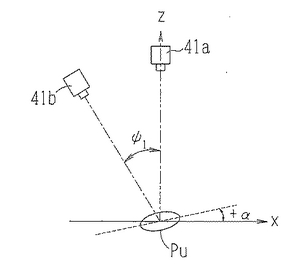
また、手術顕微鏡1は患者眼の傾きを含む眼のアライメント状態を検出する眼検出機構40が設けられている。眼検出機構40は、眼の動きの検出も兼ねる。眼検出機構40は、図5のように、患者眼の前眼部を撮像する撮像手段としての3つの撮像カメラ41a,41b,41cを持つ。このカメラ41a〜41cは移動部102に配置され、顕微鏡20と一体となって移動する。カメラ41aは、顕微鏡20の光軸L1上に配置されたハーフミラー等の光分割部材42を介して、患者眼Eの前眼部を光軸L1方向から撮像する位置に配置されている。カメラ41b及びカメラ41cは、光軸L1に直交するX軸方向及びY軸方向の直交する位置関係で、各カメラの撮像光軸が光軸L1に対して斜めになる方向から患者眼Eの前眼部を撮像する位置に配置されている。また、対物レンズ21の光軸L1上のピント位置に各カメラ41a〜41cのピントが合うように配置されている。カメラ41a〜41cの撮像信号は、画像処理部43に入力される。カメラ41a〜41cのサンプリング周波数は、200Hz以上が好ましい。画像処理部43は、光軸L1に直交する平面での患者眼Eの位置ずれ(X―Y位置)、対物レンズ21に対する距離(Z位置)、及び光軸L1に対する患者眼Eの傾き(傾きの角度及び方向)を検出する。
【0017】
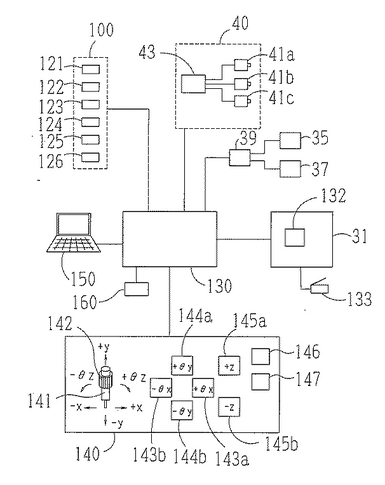
図6は、眼科装置の制御系ブロック図である。制御ユニット130には、パレルリンク機構100を動作させて移動部102と共に顕微鏡3の位置及び姿勢を変えるための操作信号等を入力する信号入力手段としての操作パネル140、画像処理部43、ガルバノミラーの駆動部35及び37を制御するスキャニング制御部39、レーザ装置本体1、データ入力装置150等が接続されている。レーザ装置本体31の内部には、角膜をアブレーション可能なレーザ光を出射する紫外レーザ光源132が配置されている。
【0018】
操作パネル140には移動部102に配置された顕微鏡20を水平方向(XY方向)に移動させる信号を入力するレバー141、顕微鏡20を所定の軸回りに回転させる信号を入力する回転ノブ142、顕微鏡20をX方向で傾ける信号(傾き角を変更する信号)を入力するスイッチ143a,143b、顕微鏡20をY方向で傾ける信号(傾き角を変更する信号)を入力するスイッチ144a,144b、顕微鏡20を上下に移動す信号を入力するスイッチ145a,145bが配置されている。また、146はオートアライメントを開始させるスイッチ、147は顕微鏡20を患者眼に対して所期する位置関係に置いた後に自動追尾を開始させるスイッチである。
【0019】
次に、上記のような構成の装置において、パレルリンク機構100による顕微鏡20の位置合わせとレーザ照射の動作を説明する。
【0020】
患者は図示を略すベッドで仰向けの状態で手術を受ける。術者は、手術顕微鏡1の第1水平関節アーム11及び第2水平関節アーム12を手で動かし、患者の手術する方の眼(患者眼E)の上に顕微鏡20を粗く位置させる。患者眼Eには固視灯23を固視させ、視線を固視灯23の方向に導く。患者眼Eに対する精密な位置合わせは、顕微鏡20で患者眼Eを観察しながら、操作パネル140の各スイッチを操作してパラレルリンク機構100を動作させることで行える。制御ユニット130は、各スイッチの操作信号によりモータ121〜126を同時に制御して移動部102に配置された顕微鏡20及びレーザ照射端ユニット30の位置や傾きを変える。
【0021】
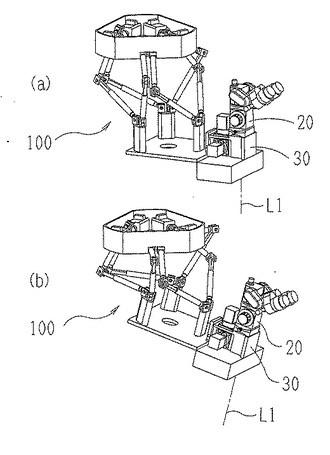
例えば、図2の状態において、6本の制御棒111〜116の屈曲量を同時に増加/減少させると、顕微鏡20の位置を上昇/下降させることができる。また、図7(a)のように、制御棒115,116の屈曲量を減少させ、制御棒112,113の屈曲量を増大させつつ制御棒111,114の屈曲量を変えると、顕微鏡20を図7(a)上の右方(検者の手前側)に移動させることができる。また、図7(b)のように、各制御棒111〜116の屈曲量を変えることにより、顕微鏡20を傾けることができる。
【0022】
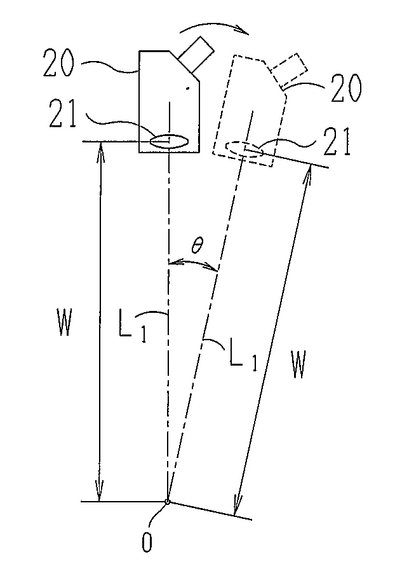
ここで、顕微鏡20の傾き角の変更に際して、制御ユニット130は顕微鏡20での観察位置を保持しつつ、その観察方向の向きだけを変えるようにパラレルリンク機構100の動作を制御する。図8に示すように、顕微鏡20が持つ対物レンズ21の光軸L1上で、対物レンズ21から距離Wだけ離れた位置を観察すべき基準点Oとする。スイッチ143a,143b,144a,144bにより傾き角を変更する信号が入力された場合、制御ユニット130は基準点Oを固定して傾きの変更角θだけ顕微鏡20を傾けると共に、基準点Oと対物レンズ21との距離Wを保持して顕微鏡20の水平位置及び高さ位置を変更すべく、パラレルリンク機構100の動作を制御する。つまり、基準点Oを中心に傾きの変更角θだけ顕微鏡20を円弧状に移動させる。これにより、傾き角を変更するスイッチ操作では、顕微鏡20による患者眼の観察位置を変えることなく、その観察方向のみを変更することができ、都合がよい。なお、距離Wは対物レンズ21のピント距離とするが、これはモニタを持つデータ入力装置150の設定で任意の距離とすることできる。
【0023】
また、顕微鏡20は予め設定した垂直基準軸を中心に回転させることも可能である。この垂直基準軸は、データ入力装置150により、図2の状態における顕微鏡20の対物レンズ21の光軸L1と同軸に設定したり、任意に変更できる。
【0024】
このように、6本の制御棒111〜116の屈曲量をそれぞれ変化させることにより、左右方向(X)、前後(Y)、上下(Z)、前後の傾斜角(θy)、左右の傾斜角(θx)、及び回転(θz)の6つの自由度が与えられる。これにより、患者眼Eに対して顕微鏡20の位置及び姿勢を適切に位置決めできる。この位置決めに際して、顕微鏡20を配置した移動部102が6本の支持軸である制御棒111〜116により支持されているため、簡単な構成でありながら、剛性が高く、自在に精密な位置決めが可能となる。
【0025】
また、顕微鏡20の位置や姿勢を決めた後、スイッチ147を押すことにより眼検出機構40を作動させ、自動追尾モードを開始することができる。カメラ41a,41b,41cに撮像された患者眼Eの前眼部像は画像処理部43に入力される。制御ユニット130は、スイッチ147の信号をトリガとして、このときに撮像された前眼部像の位置を基準状態(所期する状態)とする。患者眼Eの位置は、例えば、前眼部像の瞳孔エッジや瞳孔中心を画像処理して検出できる。患者眼Eが左右前後方向(XY方向)で動いた場合、カメラ41a〜41cにより撮像される瞳孔が移動する。患者眼Eが上下方向(Z方向)に動いた場合、カメラ41b及び41cにより撮像される瞳孔の位置が変化する。制御ユニット130は、各カメラ41a〜41cにより撮像される前眼部像が基準状態になるようにパレルリンク機構100を駆動制御して顕微鏡20の位置を患者眼Eの動きに合わせて移動する。
【0026】
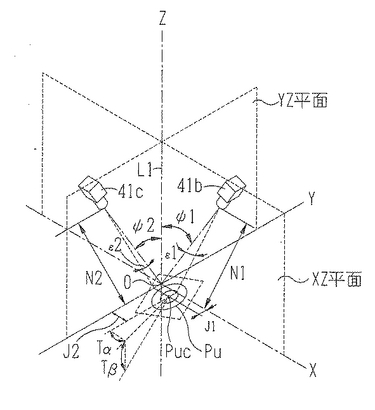
患者眼Eの傾き状態は、XY方向に配置されたカメラ41b,41cにより取得された像から検出できる。例えば、図9のように、基準状態のときに円形の瞳孔エッジPuが、X方向で角度+αだけ傾いたとする。第1カメラ41aで撮像される瞳孔エッジPuの形状は、円形形状からX方向に角度αだけ傾いた楕円形状になる。一方、第1カメラ41aに対してX軸方向に角度ψ1だけ傾けて配置された第2カメラ41bで撮像される瞳孔エッジPuの形状は、角度ψ1での楕円形状に対して角度(ψ1−α)だけ傾いた形状に変化する。これにより、X方向における傾き角度と傾き方向(+方向と−方向の何れであるか)が検出される。同様に、第1カメラ41aに対してY方向に角度ψ2だけ傾けて配置された第3カメラ41cにより、Y方向における傾き角度と傾き方向(+方向と−方向の何れであるか)が検出される。制御ユニット130は、これらの検出情報のフィードバックに基づいてパレルリンク機構100を駆動制御し、患者眼に対する顕微鏡20の位置関係が初めの基準状態となるように、顕微鏡20の傾き角を変更すると共に顕微鏡20の水平位置及び高さ位置を変更する。これにより、術者はXYZ方向の位置変化に加えて、患者眼Eの傾きを含む眼の動きに合わせた適切な状態で患者眼Eを観察できる。
【0027】
さらに、患者眼Eの視軸回りの回転については、カメラ41aで撮像される虹彩模様等の前眼部像の特徴点を処理することで、検出するこができる。この検出情報に基づいて顕微鏡20の回転を変えることにより適切に患者眼Eを観察できる。
【0028】
上記は、初めの基準状態の位置合わせを術者が操作パネル140の操作で行うものとしたが、予め設定された基準状態となるようにオートアライメントも可能である。アライメントの基準状態は、例えば、瞳孔中心に光軸L1を一致させると共に、虹彩面に対して光軸L1が垂直になる状態とする。スイッチ146を押してオートアライメントに設定した後、顕微鏡20を粗く患者眼Eに位置合わせすることで、患者眼Eがカメラ41a〜41cの検出可能範囲に入ると、オートアライメントが作動する。制御ユニット130は、3つのカメラ41a〜41cにより検出された情報を基に、顕微鏡20の観察状態が基準状態となるようにパレルリンク機構100を駆動制御する。
【0029】
顕微鏡20の位置が適切な状態となれば、治療レーザ光の照射が可能になる。術者がフットスイッチ133を踏んでレーザ照射のトリガ信号を入力すると、レーザ装置本体1の内部に配置された紫外レーザ光源132が駆動される。レーザ装置本体1からのレーザ光は、多間接アーム33によりレーザ照射端ユニット30まで導光される。ガルバノ制御部39は、予めデータ入力装置150により入力された角膜矯正データに従ってガルバノミラー34,36の駆動を制御する。ガルバノミラー34,36の駆動により、ダイクロイックミラー38で反射された小径スポットのレーザ光は患者眼Eの角膜上で走査され、レーザ光を重ね合わせることにより角膜形状が所期する形状にアブレーションされる。
【0030】
このレーザ照射時においても、患者眼Eが動くと眼検出機構40による検出情報を基にパラレルリンク機構100が駆動され、患者眼Eの動きに合わせて顕微鏡20と共にレーザ照射端ユニット30が移動される。これにより、患者眼Eの傾きを含む眼の動きに合わせて、レーザ照射位置が角膜上の適正位置に照射される。
【0031】
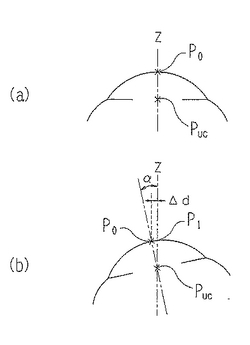
例えば、図10(a)のように、患者眼Eが水平方向にあるときの状態から、顔の姿勢の変化や眼転(眼のひき運動)により、図10(b)のように、眼が角度αだけ傾いたとする。レーザ光は、瞳孔中心Pucを基準に照射するものとする。図10(a)の状態で、瞳孔中心Pucを垂直方向(Z方向)から見たときの角膜上の位置はP0である。しかし、眼が傾いた図10(b)の状態で垂直方向から瞳孔中心Pucを見ると、角膜上の対応点は位置P0からΔdだけずれた位置P1となっている。眼の傾きを考慮せずに、瞳孔中心Pucのみを基準に水平方向に追尾する機構であると、眼が傾いた状態では角膜上の一定位置P0を基準にレーザ照射できず、結果的に精度の高い適切な角膜切除が行えなくなる。
【0032】
これに対して、本装置では眼の傾きを含む眼の動きを検出し、レーザ照射の基準軸を眼の傾きαに合わせて変化させることが可能であるので、角膜上の一定位置P0を基準にしたレーザ照射が可能となる。これにより、精度の高い角膜切除が行える。
【0033】
ここで、患者眼Eの動きが速く、パラレルリンク機構100による移動では追尾が追いつかずに許容範囲を超えた場合、制御部ユニット130はレーザ装置本体31にレーザ照射の停止信号を出力する。その後、移動部102と共に移動する照射端ユニット30の追尾が追いつき、レーザ照射の許容範囲に入ったことが眼検出機構40により検出されれば、制御部ユニット130はレーザ照射の許可信号を出力してレーザ照射を再開させる。
【0034】
なお、ガルバノミラー34,36のスキャニングミラーの動きはパラレルリンク機構100の動きよりも遥かに高速動作が可能である。そのため、光軸L1に対して眼の傾きが無く、光軸L1に対する直交面での位置のみが変化した場合には、眼検出機構40の検出情報を基に、ガルバノミラー34,36によるレーザ照射の位置を眼の動きに追尾するように移動させることが可能である。この場合、スキャニング制御部39は、パラレルリンク機構100による照射端ユニット30及び顕微鏡20の移動と平行してガルバノミラー34,36のスキャニング動作を制御する。これにより、レーザ照射を中断することなく、スムーズな手術が可能となる。眼検出機構40により眼の傾きが許容範囲を超えたことが検出された場合には、前述の理由によりレーザ照射が停止される。
【0035】
レーザ照射端ユニット30に配置される角膜切除用の照射光学系は、小スポットビームをスキャニングする光学系とする他、大ビームを開口径可変のアパーチャを用いて、角膜曲率を変化させる光学系とすることも可能である。また、6つの自由度を持つパラレルリンク機構100としては、屈曲角度が可変の制御棒111〜116に代えて、伸縮を自在に変えられる6本の制御棒で構成しても良い。パラレルリンク機構100としては、レーザ照射光学系や顕微鏡20を支持する位置を個別に変えられる少なくとも6本の制御棒11〜116と、各制御棒を駆動する駆動源を持てば良く、屈曲角度や伸縮を変えられる制御棒の等価な構造としては、制御棒111〜116の基部を直線レール上でスライド移動させる機構も含まれる。
【0036】
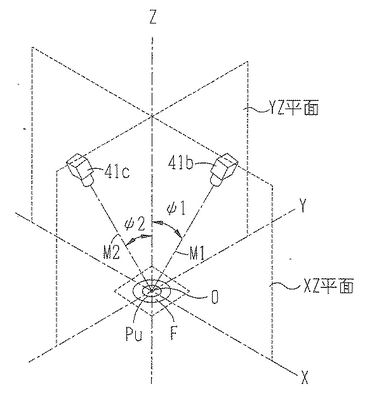
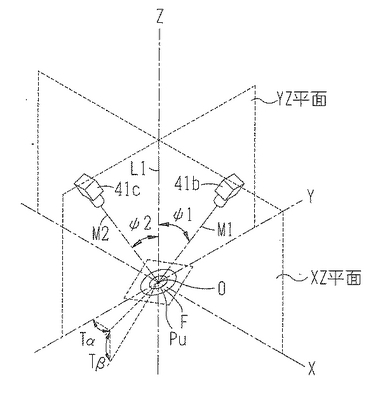
眼検出機構40が持つカメラ41b,41cにより取得された前眼部像を基に眼の傾きを検出する方法の例を説明する。図11において、レーザ照射光学系及び顕微鏡20の基準軸である光軸L1の方向をZ軸方向とし、図5と同じく、カメラ41bの撮像光軸M1及びカメラ41cの撮像光軸M2がZ軸(光軸L1)に直交するX軸方向及びY軸方向に位置するものとする。また、カメラ41bの撮像光軸M1がZ軸に対してX軸方向に角度ψ1だけ傾けて配置され、カメラ41cの撮像光軸M2がY軸方向に角度ψ2だけ傾けて配置されているものとする。例えば、ψ1=ψ2=35°とする。また、撮像光軸M1及びM2はZ軸上の所定点Oで交差するように配置されている。説明を簡単にするために、所期するアライメント状態は、虹彩面FがZ軸に対して垂直になる場合とする。この場合、瞳孔エッジPu及び虹彩面FはZ軸方向から見たときに円形であり、瞳孔中心PucがZ軸上の点Oに一致しているものとする。また、カメラ41b及びカメラ41cで得られる像は、光学歪の無い撮像素子面への投影像として考える。
【0037】
眼の傾きの検出は、瞳孔形状の変形方向を基に検出する方法と、瞳孔形状の2方向の寸法比を基に検出する方法がある。まず、瞳孔形状の変形方向を基に眼の傾斜を検出する方法を説明する。
【0038】
虹彩面FがZ軸に対して垂直である場合、カメラ41b及びカメラ41cでそれぞれ得られる瞳孔エッジPuの形状は、図12のように、長軸が水平状態の楕円形状として検出される。図12(a)は、X軸方向のカメラ41bで撮像された瞳孔エッジPu及び虹彩面Fが楕円形状となっている状態を示し、瞳孔エッジPuの楕円長軸KL1が水平方向Hとなっている。同様に、図12(b)は、Y軸方向のカメラ41cで撮像された瞳孔エッジPu及び虹彩面Fが楕円となっている状態を示し、瞳孔エッジPuの楕円長軸KL2も水平方向Hとなっている。なお、瞳孔エッジPuの楕円形状は、撮像された画像の瞳孔エッジPuを楕円近似処理(最小二乗法により楕円にフィットさせる処理)を行って検出することができる。
【0039】
次に、虹彩面Fが水平状態から傾斜した場合(眼が回転した場合)を考える。眼がX軸方向のみに傾いた場合、X軸方向のカメラ41bで撮像された瞳孔エッジPuの楕円形状については、楕円の離心率は変わるが、長軸KL1の方向は水平方向のままで変化は無い(図13(a)参照)。一方、Y軸方向のカメラ41cで撮像された瞳孔エッジPuの楕円形状については、長軸KLの方向が水平方向Hに対して右又は左に傾いて検出される(図13(b)参照)。眼がY軸方向のみに傾いた場合は、カメラ41bとカメラ41cでそれぞれ得られる楕円形状は、図13(a),(b)と逆の関係となる。したがって、この検出方法では、Y軸方向のカメラ41cによりX軸方向成分の眼の傾き情報を検出でき、X軸方向のカメラ41bによりY軸方向成分の眼の傾き情報を検出できる。
【0040】
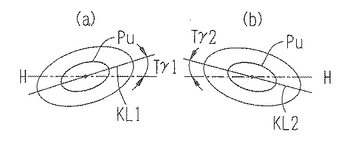
さらに、眼がX軸方向及びY軸方向に傾いた場合を考える。図14のように、虹彩面Fが水平状態から、XY平面のY軸から角度Tαの方向で、且つXY平面に対して角度Tβだけ傾いたとする。このとき、X軸方向のカメラ41bで撮像された瞳孔エッジPuの楕円形状について、水平方向Hに対する楕円長軸KL1の角度をTγ1とし(図15(a)参照)、Y軸方向のカメラ41cで撮像された瞳孔エッジPuの楕円形状について、水平方向Hに対する楕円長軸KL2の角度をTγ2(図15(b)参照)とすると、次の関係式が成り立つ。
【0041】
【数1】

上記の2つの式において、角度ψ1,ψ2は設計的に既知であり、Tγ1,Tγ2はカメラ41b及び41cで得られる瞳孔エッジPuを画像処理して検出できるので、眼の傾きである角度Tα及びTβが求められる。眼の傾き検出においては、瞳孔エッジPuの楕円の長軸方向の代わりに短軸方向を使用することも可能である。
【0042】
なお、上記のように楕円形状を検出する方法においては、Z軸(光軸L1=レーザ照射光学系の基準軸)と各カメラ41b,41cの撮像光軸とが成す角度(ψ1,ψ2)だけ眼が傾斜した場合には、撮像された瞳孔エッジPuの形状が円形となり、長軸方向が無くなってしまう。逆に、眼の傾斜により、虹彩面Fと各カメラ41b,41cの成す角度が90度以上になると、瞳孔が検出できなくなる。角度ψ1,ψ2は大きくなるほど楕円の離心率が大きくなり、楕円として検出しやすくなるが、角度45度を越えた場合は傾きの検出範囲のバランスが悪くなる。この場合、さらに、鼻や頬等により撮像の影になりやすくなる。一方、角度ψ1,ψ2が小さくなると、楕円の離心率が小さくなるので楕円としての検出が難しくなり、また検出範囲も狭くなる。したがって、角度ψ1,ψ2としては、30度以上、45度以下の値が好ましい。
【0043】
また、カメラ41b,41cの両者の撮像光軸が成す角度は、好ましくは70度〜110度の範囲である。両者の撮像光軸が成す角度を上記実施形態のように90度(直交関係)にすると、異なる方向で撮像される瞳孔エッジの楕円形状の傾きが検出し易く、特に好ましい。
【0044】
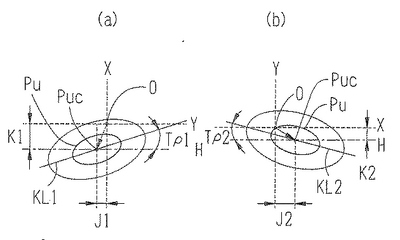
図16は、図14に示す眼がXY方向で位置ずれを起した場合を説明する図である。眼の位置ずれについて、カメラ41bから見た縦方向の角度の変化をε1(縦方向の位置ずれを表す)とし、カメラ41bから瞳孔中心Pucまでの縦方向の距離をN1、横方向の位置ずれをJ1とする。このとき、カメラ41bで撮像された瞳孔エッジPuの楕円形状について、水平方向Hに対する楕円長軸KL1の角度をTρ1とすると(図17(a)参照)、
【0045】
【数2】
となる。眼のY軸方向への位置ずれであるJ1は、カメラ41bの撮像光軸から瞳孔中心Pucの横方向のずれ量から検出できる。ε1及びN1は、撮像光軸から瞳孔中心Pucの縦方向のずれ量が分かれば、カメラ41bの配置条件から演算できる。
【0046】
また、カメラ41cから見た縦方向の角度の変化をε2(縦方向の位置ずれを表す)とし、カメラ41cから瞳孔中心Pucまでの縦方向の距離をN2、横方向の位置ずれをJ2とする。このとき、カメラ41cで撮像された瞳孔エッジPuの楕円形状について、水平方向Hに対する楕円長軸KL2の角度をTρ2とすると(図17(b)参照)、
【0047】
【数3】
となる。眼のX軸方向への位置ずれであるJ2は、カメラ41cの撮像光軸から瞳孔中心Pucの横方向のずれ量から検出できる。ε2及びN2は、撮像光軸から瞳孔中心Pucの縦方向のずれ量が分かれば、カメラ41cの配置条件から演算できる。
【0048】
なお、眼のX軸方向への位置ずれは、図17(a)のように、カメラ41bで検出される瞳孔中心Pucの縦方向のずれであるK1としても検出できる。眼のY軸方向への位置ずれは、図17(b)のように、カメラ41cで検出される瞳孔中心Pucの縦方向のずれであるK2としても検出できる。
【0049】
ここで、さらに眼がZ軸方向にδZだけ位置ずれを起こした場合を考える。この場合、カメラ41bで検出される眼のX軸方向への位置ずれK1からの変化をKδZ1とすると、
【0050】
【数4】
となる。一方、カメラ41bで検出される眼のY軸方向への位置ずれは、J1のまま変化しない。同様に、眼がZ軸方向にδZだけ位置ずれを起こした場合、カメラ41cで検出される眼のY軸方向への位置ずれK2からの変化をKδZ2とすると、
【0051】
【数5】
となる。一方、カメラ41cで検出される眼のX軸方向への位置ずれは、J2のまま変化しない。したがって、2つのカメラ41b,41cの瞳孔位置の検出情報からXY方向の位置ずれ情報及びZ方向の位置ずれ情報が分かる。眼がZ方向に位置ずれを起こした場合の眼の傾斜情報は、Z方向の位置ずれ分をオフセットして計算すれば良い。
【0052】
上記の基準軸に対する患者眼の位置ずれ及び傾きの検出は、斜め方向から撮像した瞳孔エッジPuの形状を楕円近似して求め、楕円の長軸(又は短軸)を基に傾斜情報を算出している。この方法は、精度が高い反面、演算処理に時間を要する。そこで、眼の位置及び傾き情報の簡素化した検出方法を、図18を使用して説明する。
【0053】
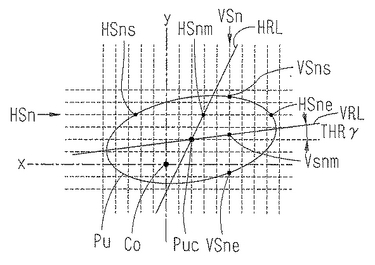
図18は、カメラ41b又は41cにより撮像された前眼部像の瞳孔エッジPuの像を示す。図18において、撮像された前眼部画像における撮像中心をCoとし、中心Coを通る水平軸をx、中心Coを通る垂直軸をyとする。撮像された前眼部画像における瞳孔部分を水平走査及び垂直走査し、各走査線上の瞳孔エッジPuの位置を検出する。ある水平走査線HSn上において、瞳孔エッジPuの開始点HSns及び終了点HSneが検出されたら、この開始点HSns及び終了点HSneの中点HSnmを得る。同様に、他の水平走査線HSnについても、瞳孔エッジPuの開始点HSns及び終了点HSneが検出されたら、その中点HSnmを得る。そして、水平走査線上の各中点HSnmについて、その回帰直線HRLを求める。
【0054】
垂直方向の走査においても、ある垂直走査線VSn上の瞳孔エッジPuの開始点VSns及び終了点VSneが検出されたら、この開始点VSns及び終了点VSneの中点VSnmを得る。他の垂直走査線についても瞳孔エッジPuの開始点VSns及び終了点VSneを検出した後、その中点VSnmを得る。そして、垂直走査線上の各中点VSnmについて、その回帰直線VRLを求める。
【0055】
瞳孔中心Pucは、水平走査の回帰直線HRLと垂直走査の回帰直線VRLとの交点として得ることができる。眼の位置ずれ情報は、撮像中心Coに対する瞳孔中心Pucのxy方向の位置ずれとして得ることができる。眼の傾き情報は、水平走査方向に対する回帰直線HRLの傾斜角度THRγ(又は垂直走査方向に対する回帰直線VRLの傾斜角度としても良い)として得ることができる。この傾き情報は、先の説明の傾き情報ほど厳密でないが、少なくとも眼の傾きの程度は検出できる。この方法によれば、眼の傾斜情報の検出に際して、瞳孔エッジPuを楕円形状にフィットさせる処理の必要がなく、演算処理時間の簡素化を図ることができる。なお、水平方向及び垂直方向の走査線の数は、精度と演算時間を考慮して増減させれば良い。
【0056】
患者眼の位置検出は、瞳孔エッジPuに囲まれた領域の重心位置として求めても良い。眼の傾き情報の検出についても、上記は一例であり、2つのカメラ41b,41cでそれぞれ得られる瞳孔や虹彩の前眼部画像を利用することにより、他の方法によっても得ることができる。
【0057】
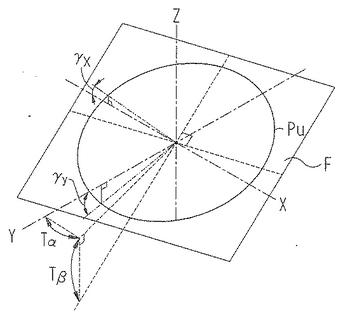
次に、瞳孔形状の瞳孔中心を基準にした2方向の瞳孔形状の寸法比を基に眼の傾斜を検出する方法を説明する。図19は、図14と同じく、虹彩面F上の瞳孔エッジPuがXY平面のY軸から角度Tαの方向で、且つXY平面に対して角度Tβだけ傾いた場合を説明する図である。図19において、虹彩面FがXZ平面を横切ったときのX軸との角度をγx、虹彩面FがYZ平面を横切ったときのY軸との角度をγyとする。このとき、傾き角度Tα,Tβと角度γx,γyの間には、数学的に次のような関係が成り立つ。
【0058】
【数6】
また、図20は、傾いた瞳孔エッジPuにおいて、X軸カメラ41bの検出面に投影される瞳孔形状の変化を説明する図である(図19に対して見る方向を変えている)。このときカメラ41bの検出面に投影される瞳孔形状について、図21(a)に示すように、瞳孔エッジPuの瞳孔中心Pucからの垂直方向(x軸方向)の寸法及び水平方向(y軸方向)の寸法をrv1,rh1とする。同様に、Y軸カメラ41cの検出面に投影される瞳孔形状について、図21(b)に示すように、瞳孔エッジPuの瞳孔中心Pucからの垂直方向(x軸方向)の寸法及び水平方向(y軸方向)の寸法をrv2、rh2とする。瞳孔エッジPuの半径=rとすると、垂直方向の寸法rv1,rv2はそれぞれ次のように表すことができる。
【0059】
【数7】
次に、カメラ41bの検出面に投影される水平方向の寸法rh1について、図22により説明する。図22は図20の部分拡大図である。図22において、カメラ41bの瞳孔中心を原点としたy軸上に投影される瞳孔エッジを点Aとし、点Aからカメラ41bの投影方向(角度ψ1方向)に延ばした線とY軸との交点を点Bとし、点Bから角度γyで傾斜した虹彩面FまでZ方向に下ろした線の交点を点Cとする。線分ABの長さをa、線分BCの長さをb、線分CAの長さをcとする。図22より、線分OB=rh1、線分OA=rであるので、
【0060】
【数8】
また、三角形ABCを考えたとき、線分BCと線分ACの成す角度=(90−γx )であり、線分ABと線分ACの成す角度={180−ψ1−(90−γx)}であるので、正弦定理より、a/sin(90−γx )=b/sin{180−ψ1−(90−γx)}の関係がある。sin{180−ψ1−(90−γx)}=sin(ψ1+90−γx)である。したがって、線分ABの長さaは、数学的に次のように求めることができる。
【0061】
【数9】
上記の式11、式12、式13より、rh1は以下の式で求められる。
【0062】
【数10】
同様に、rh2は以下となる。
【0063】
【数11】
上記の式9、式14より、カメラ41bにより得られた瞳孔エッジPuの縦/横の寸法比Q1=rv1/rh1は、瞳孔エッジPuの半径rが消去された以下の式となる。
【0064】
【数12】
同様に、カメラ41cにより得られた瞳孔エッジPuの縦/横の寸法比Q2=rv2/rh2は、瞳孔エッジPuの半径rが消去された以下の式となる。
【0065】
【数13】
上記の式16、式17において、Q1,Q2は、それぞれカメラ41b及び41cで得られた前眼部像を画像処理して瞳孔エッジPuを検出することにより求めることができる。角度ψ1及びψ2は設計的に既知である。従って、2つの式16及び式17より、γx及びγyが求められる。γx及びγyが分かれば、これを前述の式7及び式8に代入することにより、眼の傾きである傾き角度Tα,Tβが求められる。
【0066】
また、図16に示したように、眼の瞳孔中心PucがX軸方向にJ2、Y軸方向にJ1だけずれた場合は、カメラ41b及び41cで得られる瞳孔中心Pucをそれぞれ画像処理して求めることにより得ることができる。そして、瞳孔中心Pucを基準にして式15のQ1及び式16のQ2を求めることにより、このときの角度Tα,Tβが求められる。さらに、眼がZ軸方向にδZだけ位置ずれを起こした場合についても、前述の式5及び式6から求める位置ずれを求めることができる。したがって、2つのカメラ41b及び41cの前眼部像を基に3次元的な眼の位置ずれを求めることができる。
【0067】
なお、2つのカメラ41b及び41cにより2方向の瞳孔形状の寸法比を基に眼の傾斜を検出する方法においては、瞳孔エッジの寸法比を得る上での縦長さ及び横長さは単に例示に過ぎず、各画像上で直交したx軸、y軸であれば検出処理がし易いためであり、少なくとも2方向で寸法比を得ることができれば良い。さらに好ましくは、3方向以上での寸法比を平均化処理する。瞳孔エッジPuが円形でない場合にも近似的に処理できる。
【0068】
また、2方向の瞳孔形状の寸法比を基に眼の傾斜を検出する方法においては、カメラ41b及び41cのそれぞれの撮像光軸は、異なる方向で且つ光軸L1に対して所定の位置関係で配置されていれば良く、例えば、一方の撮像光軸が光軸Lと同軸であっても可能である。また、眼の傾きを検出においては、瞳孔形状の変形方向を検出する方法と2方向の瞳孔形状の寸法比を検出する方法の両方を使用することも可能である。
【0069】
上記のように眼の位置ずれ及び眼の傾き情報(Tα及びTβ)が検出できれば、制御ユニット130はその検出情報を基にパラレルリンク機構100の駆動を制御する。例えば、スイッチ146によりオートアライメントを作動させると、制御ユニット130は、眼の位置ずれ及び傾き情報に基づきパラレルリンク機構100の駆動を制御し、瞳孔中心に基準軸である光軸L1が一致する(所定の許容範囲内)と共に、虹彩面Fに対して光軸L1が垂直(所定の傾斜範囲内)になるように、顕微鏡20及びレーザ照射光学系を移動させる。眼のZ方向の位置ずれが検出された場合、制御ユニット130はZ方向の位置ずれが許容範囲となるように顕微鏡20及びレーザ照射光学系を移動させる。
【0070】
また、顕微鏡20及びレーザ照射光学系を所定の基準状態に位置決めした後、スイッチ147により自動追尾開始の信号を入力すると、制御ユニット130は、この基準状態のときに検出された光軸L1に対する眼の位置及び傾き情報を制御ユニット130が持つメモリに記憶する。メモリに記憶した眼の位置及び傾きに対して、レーザ照射時に眼の位置及び傾きの変化が検出されると、制御ユニット130はパラレルリンク機構100の駆動を制御し、眼の位置及び傾きが基準状態となるように顕微鏡20及びレーザ照射光学系を移動させる。光軸L1方向(Z方向)の位置ずれが検出された場合も、制御ユニット130は基準状態となるように顕微鏡20及びレーザ照射光学系を移動させる。これにより、患者眼の傾きを含む眼の動きに合わせて、角膜上の適正位置にレーザ光を照射することができる。
【0071】
なお、レーザ照射時に眼の傾きが大きい場合、レーザ照射光学系や顕微鏡を大きく移動する場合がある。眼の傾きが許容範囲を超えて検出されたときには、制御ユニット130はレーザ装置本体31にレーザ照射の停止信号を出力し、レーザ照射を一旦停止する。術者は、再びオートアライメントを作動させることにより、レーザ照射光学系及び顕微鏡20をレーザ照射開始時のアライメント状態に移動させることができる。
【0072】
また、制御ユニット130に接続された表示器160には、眼の傾き情報及び位置ずれ情報が表示される。術者は表示器160の表示を確認し、操作パネル140に配置されたレバー141やスイッチ等を操作することによって、顕微鏡20及びレーザ照射光学系を患者眼に対して所期する位置関係にアライメントすることができる。あるいは、表示器160に表示される眼の傾き情報を確認しながら患者の顔を動かすことにより、顕微鏡20及びレーザ照射光学系と患者眼とを所期する位置関係とすることができる。そして、レーザ照射時に眼の傾きが許容範囲を超えて検出されたときには、制御ユニット130によりレーザ照射が停止されるので、術者は再び表示器160に表示される眼の傾き情報を確認しながら患者の顔を正せば良い。表示器160に表示される眼の傾き情報及び位置ずれ情報は、例えば、光軸L1に対して虹彩面Fが垂直となるアライメント状態を基準とする。
【図面の簡単な説明】
【0073】
【図1】手術顕微鏡及びレーザ照射ユニットを備える眼科装置の全体の概略構成図である。
【図2】パラレルリンク機構の構成を説明する図である。
【図3】パラレルリンク機構の制御棒の構成を説明する図である。
【図4】レーザ照射端ユニットに配置される光学系の概略構成図である。
【図5】眼検出機構の構成を説明する図である。
【図6】眼科装置の制御系ブロック図である。
【図7】パラレルリンク機構による顕微鏡の位置、傾きの変更状態を示す図である。
【図8】傾き角を変更する信号が入力された場合に、顕微鏡20による観察位置を保持してその傾き角を変更する動作を説明する図である。
【図9】患者眼の傾き状態の検出を説明する図である。
【図10】患者眼が傾きに合わせてレーザ照射位置を角膜上の適正位置に照射するための動作を説明する図である。
【図11】眼の傾きを検出する別の方法を説明する図である。
【図12】眼が水平状態にある場合に、2つのカメラにより撮像された瞳孔エッジの楕円形状を示す図である。
【図13】眼がX軸方向のみに傾いた場合に、2つのカメラにより撮像された瞳孔エッジの楕円形状を示す図である。
【図14】眼がX及びY軸方向に傾いた場合を説明する図である。
【図15】眼がX及びY軸方向に傾いた場合に、2つのカメラにより撮像された瞳孔エッジの楕円形状の傾きを説明する図である。
【図16】図14に示す眼がXY方向で位置ずれを起した場合を説明する図である。
【図17】眼がX及びY軸方向に傾き、且つ眼がXY方向で位置ずれを起した場合に、2つのカメラにより撮像された瞳孔エッジの楕円形状の傾きを説明する図である。
【図18】眼の位置及び傾き情報の簡素化した検出方法を説明する図である。
【図19】眼の瞳孔エッジが傾いた場合を説明する図である。
【図20】X軸カメラの検出面に投影される瞳孔形状の変化を説明する図である
【図21】X軸カメラ及びY軸カメラの検出面に投影される瞳孔エッジの垂直方向、水平方向の寸法の図示である。
【図22】図20の部分拡大図である。
【符号の説明】
【0074】
1 手術顕微鏡
20 顕微鏡
21 対物レンズ
30 レーザ照射端ユニット
31 レーザ装置本体
34 第1ガルバノミラー
36 第2ガルバノミラー
40 眼検出機構
41a,41b,41c 撮像カメラ
100 パラレルリンク機構
101 固定部
102 移動部
111,112,113,114,115,116 制御棒
121,122,123,124,125,126 モータ
130 制御ユニット
140 操作パネル
【技術分野】
【0001】
本発明は、眼を観察する顕微鏡を備える眼科装置及び患者眼にレーザ照射する眼科装置に関する。
【背景技術】
【0002】
従来、眼を観察するための顕微鏡を3次元で任意の位置及び方向に向けることが可能な手術顕微鏡は、それぞれの移動や向きを変更するための専用の軸を備える構成であった(例えば、特許文献1参照)。
また、屈折矯正手術のために角膜切除用のレーザ照射光学系を組み込んだ眼科装置においては、眼を観察しながらレーザ照射することが必要なため、レーザ照射端を顕微鏡下に設けている(例えば、特許文献2参照)。この装置においては、レーザ照射端を移動するために、水平移動可能なスライドアームと、上下移動可能なアーム先端部を備え、アーム先端部に顕微鏡が配置されている。この装置においては、顕微鏡及びレーザ照射端の自由度は水平方向と上下方向の3軸方向である。
【特許文献1】特開2003−111776号公報
【特許文献2】特開平9−149914号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、従来装置には次のような問題があった。特許文献2のようにレーザ照射光学系を組み込んだ装置では、眼の傾き方向に合わせて顕微鏡やレーザ照射光学系の向きを変えることができず、角膜の一定位置を基準にしたレーザ照射が難しい問題があった。また、手術に際して、初めに患者の顔の位置を正して、観察位置や手術状態を決めたとしても、手術中に顔の姿勢を維持できず、顔が動いてしまう患者も少なくない。顔が傾くと、眼も傾く。手術中に眼が動くと、手術を中断して顕微鏡を動かすか、患者の顔をもう一度動かす等の処置が必要で、スムーズな手術が行えない。また、視線が定まらずに眼転を起こす患者も少なくない。
観察に必要な患部を常に目標に捕らえて、顕微鏡及びレーザ照射端を遠隔操作により追従させるためには、特許文献1のように1軸ずつ直列に顕微鏡を固定する機構では剛性確保が難しい。遠隔操作で各軸を移動制御するための駆動源をそれぞれの軸近辺に配置する必要があり、軸数が増えるに従い機構が複雑になり、重量も重くなる。このため、顕微鏡やレーザ照射端の位置決めが難しい問題があった。
【0004】
本発明は、上記従来技術の問題点に鑑み、患者眼に対してレーザ光を適切に照射できる眼科装置を提供することを技術課題とする。また、患者眼を適切に観察するための顕微鏡の位置決めが容易に行える眼科装置を提供することを技術課題とする。
【課題を解決するための手段】
【0005】
本発明は、上記課題を解決するために、次のような構成を備えることを特徴とする。
【0006】
(1) 患者眼に向けて角膜手術用のレーザ光を照射するレーザ照射光学系を備え、レーザ照射光学系が持つ基準軸を患者眼に対して所期する位置関係にアライメントしてレーザ照射する眼科装置において、患者眼に対する前記レーザ照射光学系の傾き及び位置を変化させる移動手段と、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、該第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段と、該眼検出手段による検出結果に基づいて前記レーザ照射光学系の基準軸が患者眼に対して所期するアライメント状態となるように前記移動手段を制御する制御手段と、を備えることを特徴とする。
(2) (1)の眼科装置において、前記眼検出手段は前記第1撮像手段及び第2撮像手段によりそれぞれ撮像された前眼部画像を処理して瞳孔形状を求め、所期するアライメント状態に対する瞳孔形状の変形に基づいて患者眼の傾きを検出することを特徴とする。
(3) (2)の眼科装置において、前記眼検出手段は、それぞれ得られた瞳孔形状の瞳孔中心を基準にした少なくとも2方向の瞳孔形状の寸法比を基に患者眼の傾きを検出することを特徴とする。
(4) (2)の眼科装置において、前記第1撮像手段及び第2撮像手段のそれぞれの撮像光軸は、前記基準軸に対して異なる方向に傾斜して配置され、前記眼検出手段は、それぞれ得られた瞳孔形状の変形方向を基に患者眼の傾きを検出することを特徴とする。
(5) (4)の眼科装置において、前記眼検出手段は、それぞれ得られた瞳孔形状について、複数ラインの水平走査又は複数ラインの垂直走査で得られる瞳孔エッジの中点位置に基づいて瞳孔形状の変形方向を求めることを特徴とする。
(6) (1)の眼科装置において、前記制御手段は、所期するアライメント状態で前記眼検出手段により得られた患者眼の傾き及び位置に対して、レーザ照射時に前記眼検出手段により得られる患者眼の傾き及び位置の変化に基づいて前記移動手段を制御することを特徴とする。
(7) (1)の眼科装置において、前記移動手段は、前記レーザ照射光学系を支持すると共に各支持位置を個別に変えられる少なくとも6本の制御棒と、各制御棒を駆動する駆動源と、を持つパラレルリンク機構を備えることを特徴とする。
(8) 患者眼に向けて角膜手術用のレーザ光を照射するレーザ照射光学系を備え、レーザ照射光学系が持つ基準軸を患者眼に対して所期する位置関係にアライメントしてレーザ照射する眼科装置において、患者眼に対する前記レーザ照射光学系の傾き及び位置を変化させる移動手段と、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、該第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段と、該眼検出手段により検出された患者眼の傾き及び位置の情報を表示する表示手段と、を備えることを特徴とする。
(9) 患者眼を観察するための顕微鏡と、該顕微鏡が配置された移動部を支持すると共に各支持位置を個別に変えられる少なくとも6本の制御棒と各制御棒を駆動する駆動源とを持ち,前記顕微鏡の傾き及び位置を変化させるパラレルリンク機構と、前記顕微鏡の位置及び傾きを変化させるための信号を入力する入力手段と、該入力信号に基づいて前記パラレルリンク機構の動作を制御する制御手段と、を備えることを特徴とする。
(10) (9)の眼科装置において、前記パラレルリンク機構が持つ少なくとも6本の制御棒は、屈曲角度又は伸縮を変えられる制御棒であることを特徴とする。
(11) (9)の制御手段は、前記入力手段により傾き角を変更する信号が入力された場合、前記顕微鏡が持つ対物レンズの光軸上の所定位置を基準点として前記顕微鏡を傾けると共に、前記基準点と対物レンズとの距離を保持するように前記パラレルリンク機構の動作を制御することを特徴とする。
(12) (9)の眼科装置において、患者眼を撮像するために前記移動部に配置された撮像手段を持ち,該撮像手段による眼画像を処理して患者眼の傾きを含むアライメント状態を検出する眼検出手段をさらに備え、前記制御手段は前記眼検出手段の検出結果に基づいて、前記顕微鏡が患者眼に対して所期する位置関係となるように前記パラレルリンク機構の動作を制御することを特徴とする。
(13) (12)の制御手段は、前記眼検出手段の検出結果に基づいて、前記顕微鏡の傾き及び位置きが患者眼の動きに追尾するように前記パラレルリンク機構の動作を制御することを特徴とする。
(14) (9)の眼科装置において、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、該第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段とを備え、前記制御手段は前記眼検出手段の検出結果に基づいて、前記顕微鏡が患者眼に対して所期するアライメント状態となるように前記パラレルリンク機構の動作を制御することを特徴とする。
【発明の効果】
【0007】
本発明によれば、患者眼に対してレーザ光を適切に照射できる。また、患者眼を適切に観察するための顕微鏡の位置決めが容易に行える。
【発明を実施するための最良の形態】
【0008】
以下、本発明の実施の形態を図面に基づいて説明する。図1は、手術顕微鏡及びレーザ照射ユニットを備える眼科装置の全体の概略構成図である。
【0009】
図1において、手術顕微鏡1は支柱脚10の上部に設けられた第1水平関節アーム11及び第2水平関節アーム12を備え、第2水平関節アームはパラレルリンク機構100の固定部101を保持する。この例ではパラレルリンク機構100を粗く移動するために2つの水平関節アームとしているが、垂直関節アームやその複合タイプであっても良い。パラレルリンク機構100は、6本の制御棒111〜116(図2参照)より移動部102を固定部101に対して移動可能に支持している。移動部102には、顕微鏡20とレーザ照射端ユニット30が配置されている。パラレルリンク機構100により移動部102に設けられた顕微鏡20,ユニット30の位置及び傾きが任意に変えられる。130はパラレルリンク機構100等を制御する制御ユニットである。140はパラレルリンク機構100を動作させるための操作信号を入力する遠隔操作用の操作パネルである。
【0010】
また、この眼科装置では、顕微鏡20の下にレーザ照射端ユニット30が配置され、レーザ装置本体31から角膜切除用の治療レーザ光(例えば、エキシマレーザ光)が多間接アーム33を介してレーザ照射端ユニット30に導光される。多間接アーム33の各関節部には治療レーザ光を反射させるミラーが配置されており、多間接アーム33の先端部は任意の動きに追従可能となっている。レーザ装置本体31からレーザ照射端ユニット30までのレーザ光の導光は、移動部102の任意の動きに追従できる導光体であれば良く、光ファイバを用いても良い。レーザ照射端ユニット30の下には、照明ユニット5が配置されている。
【0011】
次に、パラレルリンク機構100の構成を、図2及ぶ図3により説明する。図2はパラレルリンク機構100の全体及び顕微鏡20等の配置状態を示す斜視図である。図2において、パラレルリンク機構100は、固定部101に対して移動部102の位置及び傾きを変えるための6本の制御棒111,112,113,114,115,116を備える。この制御棒111〜116をそれぞれ駆動するための駆動源であるモータ121〜126は、固定部101に配置されている(図1では、モータ121、126の図示を略している)。
【0012】
図3は、1本の制御棒111の構成を説明する図である。モータ121の回転軸には偏心カム111aが取り付けられている。この偏心カム111aの回転により、制御棒111の基部111bは、固定部101に保持されている中心軸111cを中心に垂直面で回転可能となっている。基部111bには第1駆動軸111dが取り付けられ、第1駆動軸111dの先端には、その軸周りに回転可能な第1軸受け111eが取り付けられている。第1軸受け111eには、第1駆動軸111dに対して屈曲角度を変更可能に第2駆動軸111fが設けられている。さらに、第2駆動軸111fの先端には、その軸周りに回転可能な第2軸受け111gが取り付けられている。第2軸受け111gには、第2駆動軸111fに対して角度を変更可能に軸111hが取り付けられている。そして、軸111hは移動部102に固定された支持ブロック103aに取り付けられている。
【0013】
他の制御棒112〜116についても、制御棒111と同様な構成である。制御棒112は支持ブロック103aに取り付けられ、制御棒113及び114は支持ブロック103bに取り付けられ、制御棒115及び116は支持ブロック103cに取り付けられている。制御棒111〜116にそれぞれ対応して固定部101に設けられたモータ121〜126を同時に制御することにより、移動部102に配置された顕微鏡20の位置及び傾きが任意に変更可能とされる。なお、顕微鏡20は、レーザ照射端ユニット30を介して移動部102に取り付けられている。
【0014】
図4は、レーザ照射端ユニット30に配置されるレーザ照射光学系の概略構成図である。多間接アーム33から出力されたレーザ光は、スキャニングミラーとしての第1ガルバノミラー34、第2ガルバノミラー36によって2次元的にスキャニングされる。顕微鏡20の対物レンズ21と患者眼Eの間には、角膜切除用のレーザ光を反射し、可視の観察光を透過するダイクロイックミラー38が配置されている。ダイクロイックミラー38により、照射光学系の基準光軸L2は対物レンズ21の光軸L1と同軸にされる。また、対物レンズ21の光軸L1上には、固視灯23が配置されており、手術時には固視灯23を患者眼Eに固視させる。
【0015】
多間接アーム33から出射した小径スポットのレーザ光は、ガルバノミラー34,36により患者眼Eの角膜上で2次元的にスキャンされる。角膜上に照射されるレーザ光のスポット径は、好ましくは0.1〜1mm程である。レーザ光は中心部から周辺部に行くに従って徐々にエネルギ密度が低くなるビームである。この小スポットのレーザ光を角膜上で2次元的にスキャニングし、レーザ光を重ね合わせることにより角膜形状を任意の形状に切除できる。屈折矯正手術では、小スポットのレーザ光の重ね合わせにより、角膜曲率を変化させる。
【0016】
また、手術顕微鏡1は患者眼の傾きを含む眼のアライメント状態を検出する眼検出機構40が設けられている。眼検出機構40は、眼の動きの検出も兼ねる。眼検出機構40は、図5のように、患者眼の前眼部を撮像する撮像手段としての3つの撮像カメラ41a,41b,41cを持つ。このカメラ41a〜41cは移動部102に配置され、顕微鏡20と一体となって移動する。カメラ41aは、顕微鏡20の光軸L1上に配置されたハーフミラー等の光分割部材42を介して、患者眼Eの前眼部を光軸L1方向から撮像する位置に配置されている。カメラ41b及びカメラ41cは、光軸L1に直交するX軸方向及びY軸方向の直交する位置関係で、各カメラの撮像光軸が光軸L1に対して斜めになる方向から患者眼Eの前眼部を撮像する位置に配置されている。また、対物レンズ21の光軸L1上のピント位置に各カメラ41a〜41cのピントが合うように配置されている。カメラ41a〜41cの撮像信号は、画像処理部43に入力される。カメラ41a〜41cのサンプリング周波数は、200Hz以上が好ましい。画像処理部43は、光軸L1に直交する平面での患者眼Eの位置ずれ(X―Y位置)、対物レンズ21に対する距離(Z位置)、及び光軸L1に対する患者眼Eの傾き(傾きの角度及び方向)を検出する。
【0017】
図6は、眼科装置の制御系ブロック図である。制御ユニット130には、パレルリンク機構100を動作させて移動部102と共に顕微鏡3の位置及び姿勢を変えるための操作信号等を入力する信号入力手段としての操作パネル140、画像処理部43、ガルバノミラーの駆動部35及び37を制御するスキャニング制御部39、レーザ装置本体1、データ入力装置150等が接続されている。レーザ装置本体31の内部には、角膜をアブレーション可能なレーザ光を出射する紫外レーザ光源132が配置されている。
【0018】
操作パネル140には移動部102に配置された顕微鏡20を水平方向(XY方向)に移動させる信号を入力するレバー141、顕微鏡20を所定の軸回りに回転させる信号を入力する回転ノブ142、顕微鏡20をX方向で傾ける信号(傾き角を変更する信号)を入力するスイッチ143a,143b、顕微鏡20をY方向で傾ける信号(傾き角を変更する信号)を入力するスイッチ144a,144b、顕微鏡20を上下に移動す信号を入力するスイッチ145a,145bが配置されている。また、146はオートアライメントを開始させるスイッチ、147は顕微鏡20を患者眼に対して所期する位置関係に置いた後に自動追尾を開始させるスイッチである。
【0019】
次に、上記のような構成の装置において、パレルリンク機構100による顕微鏡20の位置合わせとレーザ照射の動作を説明する。
【0020】
患者は図示を略すベッドで仰向けの状態で手術を受ける。術者は、手術顕微鏡1の第1水平関節アーム11及び第2水平関節アーム12を手で動かし、患者の手術する方の眼(患者眼E)の上に顕微鏡20を粗く位置させる。患者眼Eには固視灯23を固視させ、視線を固視灯23の方向に導く。患者眼Eに対する精密な位置合わせは、顕微鏡20で患者眼Eを観察しながら、操作パネル140の各スイッチを操作してパラレルリンク機構100を動作させることで行える。制御ユニット130は、各スイッチの操作信号によりモータ121〜126を同時に制御して移動部102に配置された顕微鏡20及びレーザ照射端ユニット30の位置や傾きを変える。
【0021】
例えば、図2の状態において、6本の制御棒111〜116の屈曲量を同時に増加/減少させると、顕微鏡20の位置を上昇/下降させることができる。また、図7(a)のように、制御棒115,116の屈曲量を減少させ、制御棒112,113の屈曲量を増大させつつ制御棒111,114の屈曲量を変えると、顕微鏡20を図7(a)上の右方(検者の手前側)に移動させることができる。また、図7(b)のように、各制御棒111〜116の屈曲量を変えることにより、顕微鏡20を傾けることができる。
【0022】
ここで、顕微鏡20の傾き角の変更に際して、制御ユニット130は顕微鏡20での観察位置を保持しつつ、その観察方向の向きだけを変えるようにパラレルリンク機構100の動作を制御する。図8に示すように、顕微鏡20が持つ対物レンズ21の光軸L1上で、対物レンズ21から距離Wだけ離れた位置を観察すべき基準点Oとする。スイッチ143a,143b,144a,144bにより傾き角を変更する信号が入力された場合、制御ユニット130は基準点Oを固定して傾きの変更角θだけ顕微鏡20を傾けると共に、基準点Oと対物レンズ21との距離Wを保持して顕微鏡20の水平位置及び高さ位置を変更すべく、パラレルリンク機構100の動作を制御する。つまり、基準点Oを中心に傾きの変更角θだけ顕微鏡20を円弧状に移動させる。これにより、傾き角を変更するスイッチ操作では、顕微鏡20による患者眼の観察位置を変えることなく、その観察方向のみを変更することができ、都合がよい。なお、距離Wは対物レンズ21のピント距離とするが、これはモニタを持つデータ入力装置150の設定で任意の距離とすることできる。
【0023】
また、顕微鏡20は予め設定した垂直基準軸を中心に回転させることも可能である。この垂直基準軸は、データ入力装置150により、図2の状態における顕微鏡20の対物レンズ21の光軸L1と同軸に設定したり、任意に変更できる。
【0024】
このように、6本の制御棒111〜116の屈曲量をそれぞれ変化させることにより、左右方向(X)、前後(Y)、上下(Z)、前後の傾斜角(θy)、左右の傾斜角(θx)、及び回転(θz)の6つの自由度が与えられる。これにより、患者眼Eに対して顕微鏡20の位置及び姿勢を適切に位置決めできる。この位置決めに際して、顕微鏡20を配置した移動部102が6本の支持軸である制御棒111〜116により支持されているため、簡単な構成でありながら、剛性が高く、自在に精密な位置決めが可能となる。
【0025】
また、顕微鏡20の位置や姿勢を決めた後、スイッチ147を押すことにより眼検出機構40を作動させ、自動追尾モードを開始することができる。カメラ41a,41b,41cに撮像された患者眼Eの前眼部像は画像処理部43に入力される。制御ユニット130は、スイッチ147の信号をトリガとして、このときに撮像された前眼部像の位置を基準状態(所期する状態)とする。患者眼Eの位置は、例えば、前眼部像の瞳孔エッジや瞳孔中心を画像処理して検出できる。患者眼Eが左右前後方向(XY方向)で動いた場合、カメラ41a〜41cにより撮像される瞳孔が移動する。患者眼Eが上下方向(Z方向)に動いた場合、カメラ41b及び41cにより撮像される瞳孔の位置が変化する。制御ユニット130は、各カメラ41a〜41cにより撮像される前眼部像が基準状態になるようにパレルリンク機構100を駆動制御して顕微鏡20の位置を患者眼Eの動きに合わせて移動する。
【0026】
患者眼Eの傾き状態は、XY方向に配置されたカメラ41b,41cにより取得された像から検出できる。例えば、図9のように、基準状態のときに円形の瞳孔エッジPuが、X方向で角度+αだけ傾いたとする。第1カメラ41aで撮像される瞳孔エッジPuの形状は、円形形状からX方向に角度αだけ傾いた楕円形状になる。一方、第1カメラ41aに対してX軸方向に角度ψ1だけ傾けて配置された第2カメラ41bで撮像される瞳孔エッジPuの形状は、角度ψ1での楕円形状に対して角度(ψ1−α)だけ傾いた形状に変化する。これにより、X方向における傾き角度と傾き方向(+方向と−方向の何れであるか)が検出される。同様に、第1カメラ41aに対してY方向に角度ψ2だけ傾けて配置された第3カメラ41cにより、Y方向における傾き角度と傾き方向(+方向と−方向の何れであるか)が検出される。制御ユニット130は、これらの検出情報のフィードバックに基づいてパレルリンク機構100を駆動制御し、患者眼に対する顕微鏡20の位置関係が初めの基準状態となるように、顕微鏡20の傾き角を変更すると共に顕微鏡20の水平位置及び高さ位置を変更する。これにより、術者はXYZ方向の位置変化に加えて、患者眼Eの傾きを含む眼の動きに合わせた適切な状態で患者眼Eを観察できる。
【0027】
さらに、患者眼Eの視軸回りの回転については、カメラ41aで撮像される虹彩模様等の前眼部像の特徴点を処理することで、検出するこができる。この検出情報に基づいて顕微鏡20の回転を変えることにより適切に患者眼Eを観察できる。
【0028】
上記は、初めの基準状態の位置合わせを術者が操作パネル140の操作で行うものとしたが、予め設定された基準状態となるようにオートアライメントも可能である。アライメントの基準状態は、例えば、瞳孔中心に光軸L1を一致させると共に、虹彩面に対して光軸L1が垂直になる状態とする。スイッチ146を押してオートアライメントに設定した後、顕微鏡20を粗く患者眼Eに位置合わせすることで、患者眼Eがカメラ41a〜41cの検出可能範囲に入ると、オートアライメントが作動する。制御ユニット130は、3つのカメラ41a〜41cにより検出された情報を基に、顕微鏡20の観察状態が基準状態となるようにパレルリンク機構100を駆動制御する。
【0029】
顕微鏡20の位置が適切な状態となれば、治療レーザ光の照射が可能になる。術者がフットスイッチ133を踏んでレーザ照射のトリガ信号を入力すると、レーザ装置本体1の内部に配置された紫外レーザ光源132が駆動される。レーザ装置本体1からのレーザ光は、多間接アーム33によりレーザ照射端ユニット30まで導光される。ガルバノ制御部39は、予めデータ入力装置150により入力された角膜矯正データに従ってガルバノミラー34,36の駆動を制御する。ガルバノミラー34,36の駆動により、ダイクロイックミラー38で反射された小径スポットのレーザ光は患者眼Eの角膜上で走査され、レーザ光を重ね合わせることにより角膜形状が所期する形状にアブレーションされる。
【0030】
このレーザ照射時においても、患者眼Eが動くと眼検出機構40による検出情報を基にパラレルリンク機構100が駆動され、患者眼Eの動きに合わせて顕微鏡20と共にレーザ照射端ユニット30が移動される。これにより、患者眼Eの傾きを含む眼の動きに合わせて、レーザ照射位置が角膜上の適正位置に照射される。
【0031】
例えば、図10(a)のように、患者眼Eが水平方向にあるときの状態から、顔の姿勢の変化や眼転(眼のひき運動)により、図10(b)のように、眼が角度αだけ傾いたとする。レーザ光は、瞳孔中心Pucを基準に照射するものとする。図10(a)の状態で、瞳孔中心Pucを垂直方向(Z方向)から見たときの角膜上の位置はP0である。しかし、眼が傾いた図10(b)の状態で垂直方向から瞳孔中心Pucを見ると、角膜上の対応点は位置P0からΔdだけずれた位置P1となっている。眼の傾きを考慮せずに、瞳孔中心Pucのみを基準に水平方向に追尾する機構であると、眼が傾いた状態では角膜上の一定位置P0を基準にレーザ照射できず、結果的に精度の高い適切な角膜切除が行えなくなる。
【0032】
これに対して、本装置では眼の傾きを含む眼の動きを検出し、レーザ照射の基準軸を眼の傾きαに合わせて変化させることが可能であるので、角膜上の一定位置P0を基準にしたレーザ照射が可能となる。これにより、精度の高い角膜切除が行える。
【0033】
ここで、患者眼Eの動きが速く、パラレルリンク機構100による移動では追尾が追いつかずに許容範囲を超えた場合、制御部ユニット130はレーザ装置本体31にレーザ照射の停止信号を出力する。その後、移動部102と共に移動する照射端ユニット30の追尾が追いつき、レーザ照射の許容範囲に入ったことが眼検出機構40により検出されれば、制御部ユニット130はレーザ照射の許可信号を出力してレーザ照射を再開させる。
【0034】
なお、ガルバノミラー34,36のスキャニングミラーの動きはパラレルリンク機構100の動きよりも遥かに高速動作が可能である。そのため、光軸L1に対して眼の傾きが無く、光軸L1に対する直交面での位置のみが変化した場合には、眼検出機構40の検出情報を基に、ガルバノミラー34,36によるレーザ照射の位置を眼の動きに追尾するように移動させることが可能である。この場合、スキャニング制御部39は、パラレルリンク機構100による照射端ユニット30及び顕微鏡20の移動と平行してガルバノミラー34,36のスキャニング動作を制御する。これにより、レーザ照射を中断することなく、スムーズな手術が可能となる。眼検出機構40により眼の傾きが許容範囲を超えたことが検出された場合には、前述の理由によりレーザ照射が停止される。
【0035】
レーザ照射端ユニット30に配置される角膜切除用の照射光学系は、小スポットビームをスキャニングする光学系とする他、大ビームを開口径可変のアパーチャを用いて、角膜曲率を変化させる光学系とすることも可能である。また、6つの自由度を持つパラレルリンク機構100としては、屈曲角度が可変の制御棒111〜116に代えて、伸縮を自在に変えられる6本の制御棒で構成しても良い。パラレルリンク機構100としては、レーザ照射光学系や顕微鏡20を支持する位置を個別に変えられる少なくとも6本の制御棒11〜116と、各制御棒を駆動する駆動源を持てば良く、屈曲角度や伸縮を変えられる制御棒の等価な構造としては、制御棒111〜116の基部を直線レール上でスライド移動させる機構も含まれる。
【0036】
眼検出機構40が持つカメラ41b,41cにより取得された前眼部像を基に眼の傾きを検出する方法の例を説明する。図11において、レーザ照射光学系及び顕微鏡20の基準軸である光軸L1の方向をZ軸方向とし、図5と同じく、カメラ41bの撮像光軸M1及びカメラ41cの撮像光軸M2がZ軸(光軸L1)に直交するX軸方向及びY軸方向に位置するものとする。また、カメラ41bの撮像光軸M1がZ軸に対してX軸方向に角度ψ1だけ傾けて配置され、カメラ41cの撮像光軸M2がY軸方向に角度ψ2だけ傾けて配置されているものとする。例えば、ψ1=ψ2=35°とする。また、撮像光軸M1及びM2はZ軸上の所定点Oで交差するように配置されている。説明を簡単にするために、所期するアライメント状態は、虹彩面FがZ軸に対して垂直になる場合とする。この場合、瞳孔エッジPu及び虹彩面FはZ軸方向から見たときに円形であり、瞳孔中心PucがZ軸上の点Oに一致しているものとする。また、カメラ41b及びカメラ41cで得られる像は、光学歪の無い撮像素子面への投影像として考える。
【0037】
眼の傾きの検出は、瞳孔形状の変形方向を基に検出する方法と、瞳孔形状の2方向の寸法比を基に検出する方法がある。まず、瞳孔形状の変形方向を基に眼の傾斜を検出する方法を説明する。
【0038】
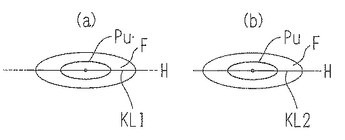
虹彩面FがZ軸に対して垂直である場合、カメラ41b及びカメラ41cでそれぞれ得られる瞳孔エッジPuの形状は、図12のように、長軸が水平状態の楕円形状として検出される。図12(a)は、X軸方向のカメラ41bで撮像された瞳孔エッジPu及び虹彩面Fが楕円形状となっている状態を示し、瞳孔エッジPuの楕円長軸KL1が水平方向Hとなっている。同様に、図12(b)は、Y軸方向のカメラ41cで撮像された瞳孔エッジPu及び虹彩面Fが楕円となっている状態を示し、瞳孔エッジPuの楕円長軸KL2も水平方向Hとなっている。なお、瞳孔エッジPuの楕円形状は、撮像された画像の瞳孔エッジPuを楕円近似処理(最小二乗法により楕円にフィットさせる処理)を行って検出することができる。
【0039】
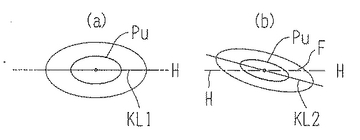
次に、虹彩面Fが水平状態から傾斜した場合(眼が回転した場合)を考える。眼がX軸方向のみに傾いた場合、X軸方向のカメラ41bで撮像された瞳孔エッジPuの楕円形状については、楕円の離心率は変わるが、長軸KL1の方向は水平方向のままで変化は無い(図13(a)参照)。一方、Y軸方向のカメラ41cで撮像された瞳孔エッジPuの楕円形状については、長軸KLの方向が水平方向Hに対して右又は左に傾いて検出される(図13(b)参照)。眼がY軸方向のみに傾いた場合は、カメラ41bとカメラ41cでそれぞれ得られる楕円形状は、図13(a),(b)と逆の関係となる。したがって、この検出方法では、Y軸方向のカメラ41cによりX軸方向成分の眼の傾き情報を検出でき、X軸方向のカメラ41bによりY軸方向成分の眼の傾き情報を検出できる。
【0040】
さらに、眼がX軸方向及びY軸方向に傾いた場合を考える。図14のように、虹彩面Fが水平状態から、XY平面のY軸から角度Tαの方向で、且つXY平面に対して角度Tβだけ傾いたとする。このとき、X軸方向のカメラ41bで撮像された瞳孔エッジPuの楕円形状について、水平方向Hに対する楕円長軸KL1の角度をTγ1とし(図15(a)参照)、Y軸方向のカメラ41cで撮像された瞳孔エッジPuの楕円形状について、水平方向Hに対する楕円長軸KL2の角度をTγ2(図15(b)参照)とすると、次の関係式が成り立つ。
【0041】
【数1】
上記の2つの式において、角度ψ1,ψ2は設計的に既知であり、Tγ1,Tγ2はカメラ41b及び41cで得られる瞳孔エッジPuを画像処理して検出できるので、眼の傾きである角度Tα及びTβが求められる。眼の傾き検出においては、瞳孔エッジPuの楕円の長軸方向の代わりに短軸方向を使用することも可能である。
【0042】
なお、上記のように楕円形状を検出する方法においては、Z軸(光軸L1=レーザ照射光学系の基準軸)と各カメラ41b,41cの撮像光軸とが成す角度(ψ1,ψ2)だけ眼が傾斜した場合には、撮像された瞳孔エッジPuの形状が円形となり、長軸方向が無くなってしまう。逆に、眼の傾斜により、虹彩面Fと各カメラ41b,41cの成す角度が90度以上になると、瞳孔が検出できなくなる。角度ψ1,ψ2は大きくなるほど楕円の離心率が大きくなり、楕円として検出しやすくなるが、角度45度を越えた場合は傾きの検出範囲のバランスが悪くなる。この場合、さらに、鼻や頬等により撮像の影になりやすくなる。一方、角度ψ1,ψ2が小さくなると、楕円の離心率が小さくなるので楕円としての検出が難しくなり、また検出範囲も狭くなる。したがって、角度ψ1,ψ2としては、30度以上、45度以下の値が好ましい。
【0043】
また、カメラ41b,41cの両者の撮像光軸が成す角度は、好ましくは70度〜110度の範囲である。両者の撮像光軸が成す角度を上記実施形態のように90度(直交関係)にすると、異なる方向で撮像される瞳孔エッジの楕円形状の傾きが検出し易く、特に好ましい。
【0044】
図16は、図14に示す眼がXY方向で位置ずれを起した場合を説明する図である。眼の位置ずれについて、カメラ41bから見た縦方向の角度の変化をε1(縦方向の位置ずれを表す)とし、カメラ41bから瞳孔中心Pucまでの縦方向の距離をN1、横方向の位置ずれをJ1とする。このとき、カメラ41bで撮像された瞳孔エッジPuの楕円形状について、水平方向Hに対する楕円長軸KL1の角度をTρ1とすると(図17(a)参照)、
【0045】
【数2】
となる。眼のY軸方向への位置ずれであるJ1は、カメラ41bの撮像光軸から瞳孔中心Pucの横方向のずれ量から検出できる。ε1及びN1は、撮像光軸から瞳孔中心Pucの縦方向のずれ量が分かれば、カメラ41bの配置条件から演算できる。
【0046】
また、カメラ41cから見た縦方向の角度の変化をε2(縦方向の位置ずれを表す)とし、カメラ41cから瞳孔中心Pucまでの縦方向の距離をN2、横方向の位置ずれをJ2とする。このとき、カメラ41cで撮像された瞳孔エッジPuの楕円形状について、水平方向Hに対する楕円長軸KL2の角度をTρ2とすると(図17(b)参照)、
【0047】
【数3】
となる。眼のX軸方向への位置ずれであるJ2は、カメラ41cの撮像光軸から瞳孔中心Pucの横方向のずれ量から検出できる。ε2及びN2は、撮像光軸から瞳孔中心Pucの縦方向のずれ量が分かれば、カメラ41cの配置条件から演算できる。
【0048】
なお、眼のX軸方向への位置ずれは、図17(a)のように、カメラ41bで検出される瞳孔中心Pucの縦方向のずれであるK1としても検出できる。眼のY軸方向への位置ずれは、図17(b)のように、カメラ41cで検出される瞳孔中心Pucの縦方向のずれであるK2としても検出できる。
【0049】
ここで、さらに眼がZ軸方向にδZだけ位置ずれを起こした場合を考える。この場合、カメラ41bで検出される眼のX軸方向への位置ずれK1からの変化をKδZ1とすると、
【0050】
【数4】
となる。一方、カメラ41bで検出される眼のY軸方向への位置ずれは、J1のまま変化しない。同様に、眼がZ軸方向にδZだけ位置ずれを起こした場合、カメラ41cで検出される眼のY軸方向への位置ずれK2からの変化をKδZ2とすると、
【0051】
【数5】
となる。一方、カメラ41cで検出される眼のX軸方向への位置ずれは、J2のまま変化しない。したがって、2つのカメラ41b,41cの瞳孔位置の検出情報からXY方向の位置ずれ情報及びZ方向の位置ずれ情報が分かる。眼がZ方向に位置ずれを起こした場合の眼の傾斜情報は、Z方向の位置ずれ分をオフセットして計算すれば良い。
【0052】
上記の基準軸に対する患者眼の位置ずれ及び傾きの検出は、斜め方向から撮像した瞳孔エッジPuの形状を楕円近似して求め、楕円の長軸(又は短軸)を基に傾斜情報を算出している。この方法は、精度が高い反面、演算処理に時間を要する。そこで、眼の位置及び傾き情報の簡素化した検出方法を、図18を使用して説明する。
【0053】
図18は、カメラ41b又は41cにより撮像された前眼部像の瞳孔エッジPuの像を示す。図18において、撮像された前眼部画像における撮像中心をCoとし、中心Coを通る水平軸をx、中心Coを通る垂直軸をyとする。撮像された前眼部画像における瞳孔部分を水平走査及び垂直走査し、各走査線上の瞳孔エッジPuの位置を検出する。ある水平走査線HSn上において、瞳孔エッジPuの開始点HSns及び終了点HSneが検出されたら、この開始点HSns及び終了点HSneの中点HSnmを得る。同様に、他の水平走査線HSnについても、瞳孔エッジPuの開始点HSns及び終了点HSneが検出されたら、その中点HSnmを得る。そして、水平走査線上の各中点HSnmについて、その回帰直線HRLを求める。
【0054】
垂直方向の走査においても、ある垂直走査線VSn上の瞳孔エッジPuの開始点VSns及び終了点VSneが検出されたら、この開始点VSns及び終了点VSneの中点VSnmを得る。他の垂直走査線についても瞳孔エッジPuの開始点VSns及び終了点VSneを検出した後、その中点VSnmを得る。そして、垂直走査線上の各中点VSnmについて、その回帰直線VRLを求める。
【0055】
瞳孔中心Pucは、水平走査の回帰直線HRLと垂直走査の回帰直線VRLとの交点として得ることができる。眼の位置ずれ情報は、撮像中心Coに対する瞳孔中心Pucのxy方向の位置ずれとして得ることができる。眼の傾き情報は、水平走査方向に対する回帰直線HRLの傾斜角度THRγ(又は垂直走査方向に対する回帰直線VRLの傾斜角度としても良い)として得ることができる。この傾き情報は、先の説明の傾き情報ほど厳密でないが、少なくとも眼の傾きの程度は検出できる。この方法によれば、眼の傾斜情報の検出に際して、瞳孔エッジPuを楕円形状にフィットさせる処理の必要がなく、演算処理時間の簡素化を図ることができる。なお、水平方向及び垂直方向の走査線の数は、精度と演算時間を考慮して増減させれば良い。
【0056】
患者眼の位置検出は、瞳孔エッジPuに囲まれた領域の重心位置として求めても良い。眼の傾き情報の検出についても、上記は一例であり、2つのカメラ41b,41cでそれぞれ得られる瞳孔や虹彩の前眼部画像を利用することにより、他の方法によっても得ることができる。
【0057】
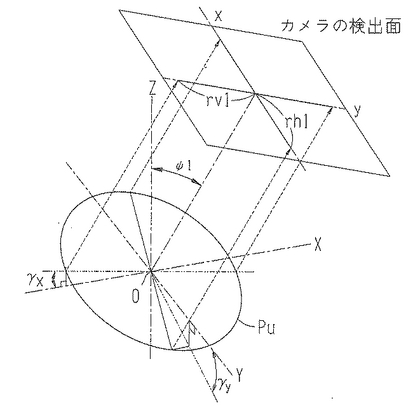
次に、瞳孔形状の瞳孔中心を基準にした2方向の瞳孔形状の寸法比を基に眼の傾斜を検出する方法を説明する。図19は、図14と同じく、虹彩面F上の瞳孔エッジPuがXY平面のY軸から角度Tαの方向で、且つXY平面に対して角度Tβだけ傾いた場合を説明する図である。図19において、虹彩面FがXZ平面を横切ったときのX軸との角度をγx、虹彩面FがYZ平面を横切ったときのY軸との角度をγyとする。このとき、傾き角度Tα,Tβと角度γx,γyの間には、数学的に次のような関係が成り立つ。
【0058】
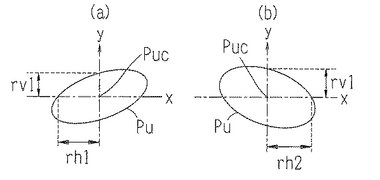
【数6】
また、図20は、傾いた瞳孔エッジPuにおいて、X軸カメラ41bの検出面に投影される瞳孔形状の変化を説明する図である(図19に対して見る方向を変えている)。このときカメラ41bの検出面に投影される瞳孔形状について、図21(a)に示すように、瞳孔エッジPuの瞳孔中心Pucからの垂直方向(x軸方向)の寸法及び水平方向(y軸方向)の寸法をrv1,rh1とする。同様に、Y軸カメラ41cの検出面に投影される瞳孔形状について、図21(b)に示すように、瞳孔エッジPuの瞳孔中心Pucからの垂直方向(x軸方向)の寸法及び水平方向(y軸方向)の寸法をrv2、rh2とする。瞳孔エッジPuの半径=rとすると、垂直方向の寸法rv1,rv2はそれぞれ次のように表すことができる。
【0059】
【数7】
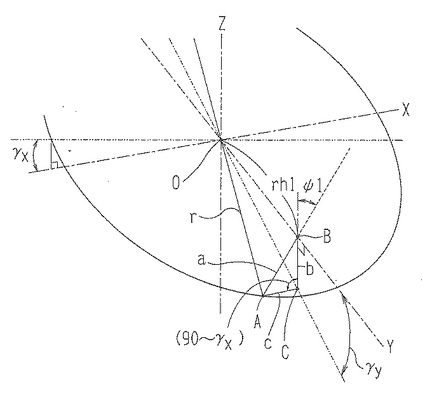
次に、カメラ41bの検出面に投影される水平方向の寸法rh1について、図22により説明する。図22は図20の部分拡大図である。図22において、カメラ41bの瞳孔中心を原点としたy軸上に投影される瞳孔エッジを点Aとし、点Aからカメラ41bの投影方向(角度ψ1方向)に延ばした線とY軸との交点を点Bとし、点Bから角度γyで傾斜した虹彩面FまでZ方向に下ろした線の交点を点Cとする。線分ABの長さをa、線分BCの長さをb、線分CAの長さをcとする。図22より、線分OB=rh1、線分OA=rであるので、
【0060】
【数8】
また、三角形ABCを考えたとき、線分BCと線分ACの成す角度=(90−γx )であり、線分ABと線分ACの成す角度={180−ψ1−(90−γx)}であるので、正弦定理より、a/sin(90−γx )=b/sin{180−ψ1−(90−γx)}の関係がある。sin{180−ψ1−(90−γx)}=sin(ψ1+90−γx)である。したがって、線分ABの長さaは、数学的に次のように求めることができる。
【0061】
【数9】
上記の式11、式12、式13より、rh1は以下の式で求められる。
【0062】
【数10】
同様に、rh2は以下となる。
【0063】
【数11】
上記の式9、式14より、カメラ41bにより得られた瞳孔エッジPuの縦/横の寸法比Q1=rv1/rh1は、瞳孔エッジPuの半径rが消去された以下の式となる。
【0064】
【数12】
同様に、カメラ41cにより得られた瞳孔エッジPuの縦/横の寸法比Q2=rv2/rh2は、瞳孔エッジPuの半径rが消去された以下の式となる。
【0065】
【数13】
上記の式16、式17において、Q1,Q2は、それぞれカメラ41b及び41cで得られた前眼部像を画像処理して瞳孔エッジPuを検出することにより求めることができる。角度ψ1及びψ2は設計的に既知である。従って、2つの式16及び式17より、γx及びγyが求められる。γx及びγyが分かれば、これを前述の式7及び式8に代入することにより、眼の傾きである傾き角度Tα,Tβが求められる。
【0066】
また、図16に示したように、眼の瞳孔中心PucがX軸方向にJ2、Y軸方向にJ1だけずれた場合は、カメラ41b及び41cで得られる瞳孔中心Pucをそれぞれ画像処理して求めることにより得ることができる。そして、瞳孔中心Pucを基準にして式15のQ1及び式16のQ2を求めることにより、このときの角度Tα,Tβが求められる。さらに、眼がZ軸方向にδZだけ位置ずれを起こした場合についても、前述の式5及び式6から求める位置ずれを求めることができる。したがって、2つのカメラ41b及び41cの前眼部像を基に3次元的な眼の位置ずれを求めることができる。
【0067】
なお、2つのカメラ41b及び41cにより2方向の瞳孔形状の寸法比を基に眼の傾斜を検出する方法においては、瞳孔エッジの寸法比を得る上での縦長さ及び横長さは単に例示に過ぎず、各画像上で直交したx軸、y軸であれば検出処理がし易いためであり、少なくとも2方向で寸法比を得ることができれば良い。さらに好ましくは、3方向以上での寸法比を平均化処理する。瞳孔エッジPuが円形でない場合にも近似的に処理できる。
【0068】
また、2方向の瞳孔形状の寸法比を基に眼の傾斜を検出する方法においては、カメラ41b及び41cのそれぞれの撮像光軸は、異なる方向で且つ光軸L1に対して所定の位置関係で配置されていれば良く、例えば、一方の撮像光軸が光軸Lと同軸であっても可能である。また、眼の傾きを検出においては、瞳孔形状の変形方向を検出する方法と2方向の瞳孔形状の寸法比を検出する方法の両方を使用することも可能である。
【0069】
上記のように眼の位置ずれ及び眼の傾き情報(Tα及びTβ)が検出できれば、制御ユニット130はその検出情報を基にパラレルリンク機構100の駆動を制御する。例えば、スイッチ146によりオートアライメントを作動させると、制御ユニット130は、眼の位置ずれ及び傾き情報に基づきパラレルリンク機構100の駆動を制御し、瞳孔中心に基準軸である光軸L1が一致する(所定の許容範囲内)と共に、虹彩面Fに対して光軸L1が垂直(所定の傾斜範囲内)になるように、顕微鏡20及びレーザ照射光学系を移動させる。眼のZ方向の位置ずれが検出された場合、制御ユニット130はZ方向の位置ずれが許容範囲となるように顕微鏡20及びレーザ照射光学系を移動させる。
【0070】
また、顕微鏡20及びレーザ照射光学系を所定の基準状態に位置決めした後、スイッチ147により自動追尾開始の信号を入力すると、制御ユニット130は、この基準状態のときに検出された光軸L1に対する眼の位置及び傾き情報を制御ユニット130が持つメモリに記憶する。メモリに記憶した眼の位置及び傾きに対して、レーザ照射時に眼の位置及び傾きの変化が検出されると、制御ユニット130はパラレルリンク機構100の駆動を制御し、眼の位置及び傾きが基準状態となるように顕微鏡20及びレーザ照射光学系を移動させる。光軸L1方向(Z方向)の位置ずれが検出された場合も、制御ユニット130は基準状態となるように顕微鏡20及びレーザ照射光学系を移動させる。これにより、患者眼の傾きを含む眼の動きに合わせて、角膜上の適正位置にレーザ光を照射することができる。
【0071】
なお、レーザ照射時に眼の傾きが大きい場合、レーザ照射光学系や顕微鏡を大きく移動する場合がある。眼の傾きが許容範囲を超えて検出されたときには、制御ユニット130はレーザ装置本体31にレーザ照射の停止信号を出力し、レーザ照射を一旦停止する。術者は、再びオートアライメントを作動させることにより、レーザ照射光学系及び顕微鏡20をレーザ照射開始時のアライメント状態に移動させることができる。
【0072】
また、制御ユニット130に接続された表示器160には、眼の傾き情報及び位置ずれ情報が表示される。術者は表示器160の表示を確認し、操作パネル140に配置されたレバー141やスイッチ等を操作することによって、顕微鏡20及びレーザ照射光学系を患者眼に対して所期する位置関係にアライメントすることができる。あるいは、表示器160に表示される眼の傾き情報を確認しながら患者の顔を動かすことにより、顕微鏡20及びレーザ照射光学系と患者眼とを所期する位置関係とすることができる。そして、レーザ照射時に眼の傾きが許容範囲を超えて検出されたときには、制御ユニット130によりレーザ照射が停止されるので、術者は再び表示器160に表示される眼の傾き情報を確認しながら患者の顔を正せば良い。表示器160に表示される眼の傾き情報及び位置ずれ情報は、例えば、光軸L1に対して虹彩面Fが垂直となるアライメント状態を基準とする。
【図面の簡単な説明】
【0073】
【図1】手術顕微鏡及びレーザ照射ユニットを備える眼科装置の全体の概略構成図である。
【図2】パラレルリンク機構の構成を説明する図である。
【図3】パラレルリンク機構の制御棒の構成を説明する図である。
【図4】レーザ照射端ユニットに配置される光学系の概略構成図である。
【図5】眼検出機構の構成を説明する図である。
【図6】眼科装置の制御系ブロック図である。
【図7】パラレルリンク機構による顕微鏡の位置、傾きの変更状態を示す図である。
【図8】傾き角を変更する信号が入力された場合に、顕微鏡20による観察位置を保持してその傾き角を変更する動作を説明する図である。
【図9】患者眼の傾き状態の検出を説明する図である。
【図10】患者眼が傾きに合わせてレーザ照射位置を角膜上の適正位置に照射するための動作を説明する図である。
【図11】眼の傾きを検出する別の方法を説明する図である。
【図12】眼が水平状態にある場合に、2つのカメラにより撮像された瞳孔エッジの楕円形状を示す図である。
【図13】眼がX軸方向のみに傾いた場合に、2つのカメラにより撮像された瞳孔エッジの楕円形状を示す図である。
【図14】眼がX及びY軸方向に傾いた場合を説明する図である。
【図15】眼がX及びY軸方向に傾いた場合に、2つのカメラにより撮像された瞳孔エッジの楕円形状の傾きを説明する図である。
【図16】図14に示す眼がXY方向で位置ずれを起した場合を説明する図である。
【図17】眼がX及びY軸方向に傾き、且つ眼がXY方向で位置ずれを起した場合に、2つのカメラにより撮像された瞳孔エッジの楕円形状の傾きを説明する図である。
【図18】眼の位置及び傾き情報の簡素化した検出方法を説明する図である。
【図19】眼の瞳孔エッジが傾いた場合を説明する図である。
【図20】X軸カメラの検出面に投影される瞳孔形状の変化を説明する図である
【図21】X軸カメラ及びY軸カメラの検出面に投影される瞳孔エッジの垂直方向、水平方向の寸法の図示である。
【図22】図20の部分拡大図である。
【符号の説明】
【0074】
1 手術顕微鏡
20 顕微鏡
21 対物レンズ
30 レーザ照射端ユニット
31 レーザ装置本体
34 第1ガルバノミラー
36 第2ガルバノミラー
40 眼検出機構
41a,41b,41c 撮像カメラ
100 パラレルリンク機構
101 固定部
102 移動部
111,112,113,114,115,116 制御棒
121,122,123,124,125,126 モータ
130 制御ユニット
140 操作パネル
【特許請求の範囲】
【請求項1】
患者眼に向けて角膜手術用のレーザ光を照射するレーザ照射光学系を備え、レーザ照射光学系が持つ基準軸を患者眼に対して所期する位置関係にアライメントしてレーザ照射する眼科装置において、
患者眼に対する前記レーザ照射光学系の傾き及び位置を変化させる移動手段と、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、該第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段と、該眼検出手段による検出結果に基づいて前記レーザ照射光学系の基準軸が患者眼に対して所期するアライメント状態となるように前記移動手段を制御する制御手段と、を備えることを特徴とする眼科装置。
【請求項2】
請求項1の眼科装置において、前記眼検出手段は前記第1撮像手段及び第2撮像手段によりそれぞれ撮像された前眼部画像を処理して瞳孔形状を求め、所期するアライメント状態に対する瞳孔形状の変形に基づいて患者眼の傾きを検出することを特徴とする眼科装置。
【請求項3】
請求項2の眼科装置において、前記眼検出手段は、それぞれ得られた瞳孔形状の瞳孔中心を基準にした少なくとも2方向の瞳孔形状の寸法比を基に患者眼の傾きを検出することを特徴とする眼科装置。
【請求項4】
請求項2の眼科装置において、前記第1撮像手段及び第2撮像手段のそれぞれの撮像光軸は、前記基準軸に対して異なる方向に傾斜して配置され、前記眼検出手段は、それぞれ得られた瞳孔形状の変形方向を基に患者眼の傾きを検出することを特徴とする眼科装置。
【請求項5】
請求項4の眼科装置において、前記眼検出手段は、それぞれ得られた瞳孔形状について、複数ラインの水平走査又は複数ラインの垂直走査で得られる瞳孔エッジの中点位置に基づいて瞳孔形状の変形方向を求めることを特徴とする眼科装置。
【請求項6】
請求項1の眼科装置において、前記制御手段は、所期するアライメント状態で前記眼検出手段により得られた患者眼の傾き及び位置に対して、レーザ照射時に前記眼検出手段により得られる患者眼の傾き及び位置の変化に基づいて前記移動手段を制御することを特徴とする眼科装置。
【請求項7】
請求項1の眼科装置において、前記移動手段は、前記レーザ照射光学系を支持すると共に各支持位置を個別に変えられる少なくとも6本の制御棒と、各制御棒を駆動する駆動源と、を持つパラレルリンク機構を備えることを特徴とする眼科装置。
【請求項8】
患者眼に向けて角膜手術用のレーザ光を照射するレーザ照射光学系を備え、レーザ照射光学系が持つ基準軸を患者眼に対して所期する位置関係にアライメントしてレーザ照射する眼科装置において、患者眼に対する前記レーザ照射光学系の傾き及び位置を変化させる移動手段と、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、該第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段と、該眼検出手段により検出された患者眼の傾き及び位置の情報を表示する表示手段と、を備えることを特徴とする眼科装置。
【請求項9】
患者眼を観察するための顕微鏡と、該顕微鏡が配置された移動部を支持すると共に各支持位置を個別に変えられる少なくとも6本の制御棒と各制御棒を駆動する駆動源とを持ち,前記顕微鏡の傾き及び位置を変化させるパラレルリンク機構と、前記顕微鏡の位置及び傾きを変化させるための信号を入力する入力手段と、該入力信号に基づいて前記パラレルリンク機構の動作を制御する制御手段と、を備えることを特徴とする眼科装置。
【請求項10】
請求項9の眼科装置において、前記パラレルリンク機構が持つ少なくとも6本の制御棒は、屈曲角度又は伸縮を変えられる制御棒であることを特徴とする眼科装置。
【請求項11】
請求項9の制御手段は、前記入力手段により傾き角を変更する信号が入力された場合、前記顕微鏡が持つ対物レンズの光軸上の所定位置を基準点として前記顕微鏡を傾けると共に、前記基準点と対物レンズとの距離を保持するように前記パラレルリンク機構の動作を制御することを特徴とする眼科装置。
【請求項12】
請求項9の眼科装置において、患者眼を撮像するために前記移動部に配置された撮像手段を持ち,該撮像手段による眼画像を処理して患者眼の傾きを含むアライメント状態を検出する眼検出手段をさらに備え、前記制御手段は前記眼検出手段の検出結果に基づいて、前記顕微鏡が患者眼に対して所期する位置関係となるように前記パラレルリンク機構の動作を制御することを特徴とする眼科装置。
【請求項13】
請求項12の制御手段は、前記眼検出手段の検出結果に基づいて、前記顕微鏡の傾き及び位置きが患者眼の動きに追尾するように前記パラレルリンク機構の動作を制御することを特徴とする眼科装置。
【請求項14】
請求項9の眼科装置において、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、該第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段とを備え、前記制御手段は前記眼検出手段の検出結果に基づいて、前記顕微鏡が患者眼に対して所期するアライメント状態となるように前記パラレルリンク機構の動作を制御することを特徴とする眼科装置。
【請求項1】
患者眼に向けて角膜手術用のレーザ光を照射するレーザ照射光学系を備え、レーザ照射光学系が持つ基準軸を患者眼に対して所期する位置関係にアライメントしてレーザ照射する眼科装置において、
患者眼に対する前記レーザ照射光学系の傾き及び位置を変化させる移動手段と、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、該第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段と、該眼検出手段による検出結果に基づいて前記レーザ照射光学系の基準軸が患者眼に対して所期するアライメント状態となるように前記移動手段を制御する制御手段と、を備えることを特徴とする眼科装置。
【請求項2】
請求項1の眼科装置において、前記眼検出手段は前記第1撮像手段及び第2撮像手段によりそれぞれ撮像された前眼部画像を処理して瞳孔形状を求め、所期するアライメント状態に対する瞳孔形状の変形に基づいて患者眼の傾きを検出することを特徴とする眼科装置。
【請求項3】
請求項2の眼科装置において、前記眼検出手段は、それぞれ得られた瞳孔形状の瞳孔中心を基準にした少なくとも2方向の瞳孔形状の寸法比を基に患者眼の傾きを検出することを特徴とする眼科装置。
【請求項4】
請求項2の眼科装置において、前記第1撮像手段及び第2撮像手段のそれぞれの撮像光軸は、前記基準軸に対して異なる方向に傾斜して配置され、前記眼検出手段は、それぞれ得られた瞳孔形状の変形方向を基に患者眼の傾きを検出することを特徴とする眼科装置。
【請求項5】
請求項4の眼科装置において、前記眼検出手段は、それぞれ得られた瞳孔形状について、複数ラインの水平走査又は複数ラインの垂直走査で得られる瞳孔エッジの中点位置に基づいて瞳孔形状の変形方向を求めることを特徴とする眼科装置。
【請求項6】
請求項1の眼科装置において、前記制御手段は、所期するアライメント状態で前記眼検出手段により得られた患者眼の傾き及び位置に対して、レーザ照射時に前記眼検出手段により得られる患者眼の傾き及び位置の変化に基づいて前記移動手段を制御することを特徴とする眼科装置。
【請求項7】
請求項1の眼科装置において、前記移動手段は、前記レーザ照射光学系を支持すると共に各支持位置を個別に変えられる少なくとも6本の制御棒と、各制御棒を駆動する駆動源と、を持つパラレルリンク機構を備えることを特徴とする眼科装置。
【請求項8】
患者眼に向けて角膜手術用のレーザ光を照射するレーザ照射光学系を備え、レーザ照射光学系が持つ基準軸を患者眼に対して所期する位置関係にアライメントしてレーザ照射する眼科装置において、患者眼に対する前記レーザ照射光学系の傾き及び位置を変化させる移動手段と、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、該第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段と、該眼検出手段により検出された患者眼の傾き及び位置の情報を表示する表示手段と、を備えることを特徴とする眼科装置。
【請求項9】
患者眼を観察するための顕微鏡と、該顕微鏡が配置された移動部を支持すると共に各支持位置を個別に変えられる少なくとも6本の制御棒と各制御棒を駆動する駆動源とを持ち,前記顕微鏡の傾き及び位置を変化させるパラレルリンク機構と、前記顕微鏡の位置及び傾きを変化させるための信号を入力する入力手段と、該入力信号に基づいて前記パラレルリンク機構の動作を制御する制御手段と、を備えることを特徴とする眼科装置。
【請求項10】
請求項9の眼科装置において、前記パラレルリンク機構が持つ少なくとも6本の制御棒は、屈曲角度又は伸縮を変えられる制御棒であることを特徴とする眼科装置。
【請求項11】
請求項9の制御手段は、前記入力手段により傾き角を変更する信号が入力された場合、前記顕微鏡が持つ対物レンズの光軸上の所定位置を基準点として前記顕微鏡を傾けると共に、前記基準点と対物レンズとの距離を保持するように前記パラレルリンク機構の動作を制御することを特徴とする眼科装置。
【請求項12】
請求項9の眼科装置において、患者眼を撮像するために前記移動部に配置された撮像手段を持ち,該撮像手段による眼画像を処理して患者眼の傾きを含むアライメント状態を検出する眼検出手段をさらに備え、前記制御手段は前記眼検出手段の検出結果に基づいて、前記顕微鏡が患者眼に対して所期する位置関係となるように前記パラレルリンク機構の動作を制御することを特徴とする眼科装置。
【請求項13】
請求項12の制御手段は、前記眼検出手段の検出結果に基づいて、前記顕微鏡の傾き及び位置きが患者眼の動きに追尾するように前記パラレルリンク機構の動作を制御することを特徴とする眼科装置。
【請求項14】
請求項9の眼科装置において、患者眼の前眼部を撮像する第1撮像手段及び第2撮像手段であって、それぞれの撮像光軸が異なる方向で且つ前記基準軸に対して所定の位置関係で配置された第1撮像手段及び第2撮像手段と、該第1撮像手段及び第2撮像手段によりそれぞれ得られた前眼部画像を処理して前記基準軸に対する患者眼の傾き及び位置を検出する眼検出手段とを備え、前記制御手段は前記眼検出手段の検出結果に基づいて、前記顕微鏡が患者眼に対して所期するアライメント状態となるように前記パラレルリンク機構の動作を制御することを特徴とする眼科装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2006−181358(P2006−181358A)
【公開日】平成18年7月13日(2006.7.13)
【国際特許分類】
【出願番号】特願2005−344782(P2005−344782)
【出願日】平成17年11月29日(2005.11.29)
【出願人】(000135184)株式会社ニデック (745)
【Fターム(参考)】
【公開日】平成18年7月13日(2006.7.13)
【国際特許分類】
【出願日】平成17年11月29日(2005.11.29)
【出願人】(000135184)株式会社ニデック (745)
【Fターム(参考)】
[ Back to top ]