
移動体通信装置及び追突防止支援方法
【課題】感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故を未然に防ぐ追突防止支援を行う移動体通信装置及び追突防止支援方法を提供すること。
【解決手段】移動体に備えられ、感知器が検出した感知エリアに存在する他の移動体の情報を含む情報を受信する通信部と、前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行う制御部と、を備える移動体通信装置であって、前記制御部は前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判断し、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置及び/又は前記減速目標速度を変更することとする。
【解決手段】移動体に備えられ、感知器が検出した感知エリアに存在する他の移動体の情報を含む情報を受信する通信部と、前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行う制御部と、を備える移動体通信装置であって、前記制御部は前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判断し、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置及び/又は前記減速目標速度を変更することとする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、追突(衝突)する事故を防止するように支援を行う移動体通信装置及び追突防止支援方法に関する。
【背景技術】
【0002】
近年、情報通信技術を用いて人と道路と車両とを情報でネットワークすることにより、交通事故や渋滞などといった道路交通問題の解決を目的とした高度道路通信システム(Intelligent Transport Systems、以下「ITS」という。)が研究、開発されている。ITSの中でも特に安全運転支援システム(DSSS)を扱う分野における自動車向け無線通信の形態は路車間通信と車車間通信とに大別できる。車車間通信は車両(車載装置)同士が直接情報の通信を行うのに対し、路車間通信は路側機や光ビーコン等の道路上や道路脇に設置されている機器と車両(車載装置)とが情報の通信を行う。
【0003】
路車間通信により路側機や光ビーコン等の機器から車両に発信される情報には、提供サービスの内容を示す情報を含むシステム情報と、サービスに必要な情報が含まれるものと考えられる。例えば提供サービスとして、追突防止支援システムが含まれている場合には、車載装置が追突防止支援システムを行う(追突防止支援を運転者に提供する)ために必要な情報(例えば追突する可能性がある車両の現在位置や移動速度等を示す情報)が車載装置に提供される。
【0004】
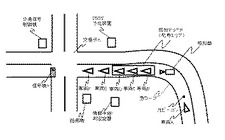
図5は、追突防止支援システムの概念図である。図5において、車両Aは車両Bの方向に向かって進行(走行)しており、車両B〜車両Fは信号待ち(交差点Xの車両B〜車両Fに対する信号機Yの信号表示が赤信号であること)により停車しているものとする。また、車両Aが図5に示す位置に存在するときは、急カーブにより車両Aの運転者が車両Bを直接視認することができない。このような状況において、車両Aの運転者が車両Bを直接視認できる位置まで車両Aが移動したときには、車両Aと車両Bとの車間距離が短く、車両Aを停車しようとしても停車しきれずに車両Bに追突してしまうことが考えられる。
【0005】
そこで追突防止支援システムでは、例えば、カーブやクレスト(例えば坂道の頂上)によって、道路における制限速度に基づいて定められる停止視距(ドライバーが道路上の物体を認めてから停止するまでに必要な距離、詳細は後述)を確保できないエリア(死角エリア)に存在する車両の情報を提供することで、車両Aの運転者が死角エリア(感知エリアP)に存在する車両を視認することができない場合であっても、死角エリア(感知エリアP)に車両が存在することを車両Aの運転者に知らせ、減速を促す等の支援を行うことによって追突事故を防止することが考えられている。
【0006】
感知エリアに存在する車両の情報は感知器情報に含まれ、感知器情報(感知エリアの位置(範囲)を示す情報や、感知エリアに存在する車両の数、種別、速度等の情報を含む情報)は感知器から出力される。感知器から出力された感知器情報は、情報中継・判定装置と、路側機及び/又は光ビーコンとを介して車載装置に提供される。なお、交通信号制御機から出力される情報(交差点情報や信号機情報を含む情報)や、DSSS下位装置から出力される情報(道路線形情報や規制情報を含む情報)も、情報中継・判定装置と、路側機及び/又は光ビーコンとを介して車載装置に提供される。すなわち情報中継・判定装置は、情報源(DSSS下位装置、交通信号制御機、感知器)から出力された情報(受信した情報)を集約・編集して提供ダウンリンク情報(路側機や光ビーコンから車載装置に送信される情報)を路側機や光ビーコンに登録する。
【0007】
ところで上述した追突防止支援システムによれば、感知エリアで停車している車両の存在を自車の運転者に知らせることで、自車と感知エリアに存在する車両とが追突する事故を未然に防ぐことはできるが、渋滞が感知エリアだけに留まらず、感知エリア外であって、且つ自車側に続いているときには、感知器が当該感知エリア外の車両の存在を感知できないので、自車の運転者に感知エリア外に停車している車両(図6における車両H)が存在することを知らせることはできない。
【0008】
従って、車載装置が感知エリアに存在する車両のみに基づいて追突防止支援を行った場合に、運転者がその追突防止支援に従って運転すると、感知エリア外に存在する車両との間で追突事故が発生する恐れが高くなる。
【0009】
そこで特許文献1に記載されている車載情報提供装置では、自車両の遠方の領域内で交通渋滞が発生しているが、自車両周辺の領域で交通渋滞が発生していないときに、自車両の遠方の領域内に停車車両が存在していること及び自車両と自車両の遠方の領域内に存在する停車車両との距離を運転者に提供せずに、前方に停車車両が存在することのみを知らせることとしている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特許第4059151号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、上記特許文献1に記載されている車載情報提供装置は、検出領域外に停車車両が存在する可能性があるときに具体的な追突防止支援を行わないことで、当該追突防止支援に基づく事故が発生することを防ぐものであって、検出領域外に存在する可能性がある停車車両に追突しないようにするための追突防止支援を行うものではないため、追突防止支援としては不十分である。
【0012】
本発明は、上述した問題点に鑑み、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故を未然に防ぐ追突防止支援を行う移動体通信装置及び追突防止支援方法を提供することを目的とする。
【課題を解決するための手段】
【0013】
上記目的を達成するために本発明の移動体通信装置は、移動体に備えられ、感知エリアに存在する他の移動体の情報を含む情報を受信する通信部と、前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行う制御部と、を備える移動体通信装置であって、前記制御部は、前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判断し、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置及び/又は前記減速目標速度を変更することを特徴としている。
【0014】
また本発明は、上記構成の移動体通信装置において、前記感知エリア外は、前記感知エリア以外の領域であって、且つ、前記移動体の現在位置と前記感知エリアの始点との間の領域であり、前記制御部は、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置を前記移動体の現在位置に近い位置に変更し、及び/又は前記減速目標速度を引き下げることが望ましい。
【0015】
また本発明は、上記構成の移動体通信装置において、前記制御部は、前記移動体の移動速度が前記減速目標速度よりも速いときに前記報知を行うことが望ましい。
【0016】
また本発明は、上記構成の移動体通信装置において、前記制御部は、前記移動体が減速中であれば前記報知を行わないことが望ましい。
【0017】
また本発明は、上記構成の移動体通信装置において、前記制御部は、空走距離と制動距離とに基づいて報知タイミングを決定し、決定された報知タイミングで報知を行うことが望ましい。
【0018】
上記目的を達成するために本発明の追突防止支援方法は、感知エリアに存在する他の移動体の情報を含む情報を取得するステップと、前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行うステップと、を有する追突防止支援方法であって、前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判定するステップと、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときに、前記減速目標位置及び/又は前記減速目標速度を変更するステップと、を有することを特徴としている。
【発明の効果】
【0019】
本発明によれば、感知エリアに存在する車両との事故(追突事故)を未然に防ぐ追突防止支援を行うことが可能な移動体通信装置であって、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故(追突事故)についても未然に防ぐように追突防止支援を行うことができる。より具体的には、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があると判断した時と、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在しないと判断した時とで、減速目標位置及び/又は減速目標速度を異ならせることで、状況に応じた適切な追突防止支援を行うことができる。
【図面の簡単な説明】
【0020】
【図1】は、本発明のナビゲーション装置の構成を示すブロック図である。
【図2】は、本発明のナビゲーション装置の制御部が実行する処理の流れを示す第1のフローチャートである。
【図3】は、本発明のナビゲーション装置の制御部が実行する処理の流れを示す第2のフローチャートである。
【図4】は、本発明のナビゲーション装置の制御部が実行する処理の流れを示す第3のフローチャートである。
【図5】は、追突防止支援システムの概念図である。
【図6】は、視距ラインと感知エリアとの関係を示す模式図である。
【発明を実施するための形態】
【0021】
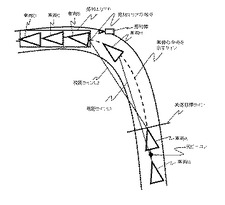
本発明の実施形態について説明するにあたって、まず、感知器情報について図6を参照して説明する。感知器情報とは上述したように感知器から出力される情報であり、感知エリアの範囲を示す情報、感知エリアに存在する車両に関する情報などが含まれる。感知エリアの範囲は設計速度(制限速度を基準に算出される)に基づいて定められる停止視距に基づいて定められる。停止視距は、道路構造令第119条に規定されており、例えば設計速度40kmにおける停止視距は40mと定められている。
【0022】
感知エリアの範囲について具体的に説明すると、本実施形態において感知エリアの始点は、車線の中央線(図6に示す車線の中央を示すライン)上の地点であって、中央線上の1の地点から直線距離で40m(停止視距)先にある同一中央線上の他の地点との間に障害物(曲がり角など)があって、停止視距を確保できなくなった場合における当該他の地点である。また、感知エリアの終点は、感知エリアの始点以後の地点であって、停止視距を確保できるようになった地点である。従って、感知エリアの範囲は、道路形状や対象道路の制限速度に応じて異なることになる。
【0023】
感知エリアの始点/終点を示す情報は、光ビーコンの位置座標(光ビーコンからの情報受信時の現在位置でもよい)及び光ビーコンの位置座標からの道程距離(対象地点までの距離で、道路の道なりに沿って計測される距離)、交差点の位置座標及び交差点の位置座標からの道程距離、緯度・経度(感知エリアの始点/終点自体の位置座標)などで示される。すなわち、図6において、車両Gから車両Hに対しては視距ラインL1上に障害物が存在せず停止視距が確保されているのに対して、車両Aから車両Bに対しては視距ラインL2上に障害物が存在しており停止視距が確保されていない。従って、車両Bは感知器によってその存在が検出されるが、車両Hは感知器によってその存在が検出されない。
【0024】
なお、設計速度は道路のおける制限速度としてもよいが、制限速度以上で走っていることを想定し、例えば制限速度+10km/hを設計速度としてもよいし、道路形状に応じて定めることとしてもよい(例えば自車の現在位置が急カーブであれば制限速度よりも遅い速度で走行していると想定されるので制限速度−10km/hを設計速度とする)。
【0025】
次に、感知エリアに存在する車両に関する情報について説明する。感知エリアに存在する車両の情報としては、感知エリアに存在する車両の種別(大型車、中型車又は普通車、自動二輪車など)を示す情報、車両の数を示す情報、車両の現在位置を示す情報、車両の移動速度を示す情報などが含まれている。本発明においては、感知器情報に基づいて後述するように感知エリア外に追突する可能性がある他の移動体が存在するか否か(感知エリア及び感知エリア外で渋滞が発生しているか否か)を判定する。なお、感知器が感知エリアに存在する歩行者などを感知できる場合、歩行者に関する情報(歩行者の数、現在位置、移動速度を示す情報)も含まれてもよい。
【0026】
以下に本発明の実施形態について図面を参照して説明する。但し、以下に示す実施形態は、本発明の技術的思想を具体化するために本発明の移動体通信装置の一例であるナビゲーション装置を示すものであって、本発明をこのナビゲーション装置に特定することを意図するものではなく、特許請求の範囲に含まれるその他の実施形態の装置にも等しく適応し得るものである。例えば、ナビゲーション機能を有しない装置や携帯電話等の移動通信端末であってもよい。なお、以下の説明では、ナビゲーション装置が自動車に取付けられた場合を例示するが、バイク等がナビゲーション装置を備えていてもよい。
【0027】
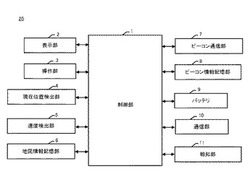
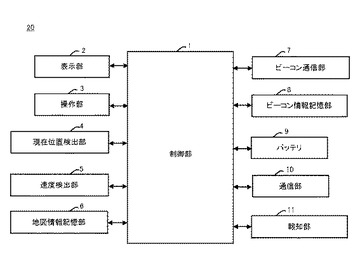
図1は本発明のナビゲーション装置の構成を示すブロック図である。ナビゲーション装置20は制御部1と、表示部2と、操作部3と、現在位置検出部4と、速度検出部5と、地図情報記憶部6と、ビーコン通信部7と、ビーコン情報記憶部8と、バッテリ9と、通信部10と、報知部11とを備えている。
【0028】
制御部1はナビゲーション装置20全体を総括的に制御する制御手段である。制御部1はCPUとROMとRAM(いずれも不図示)とを含んでいる。ROMには制御部1が実行するプログラム、プログラムの実行に必要なパラメータやデータが記憶されている。CPUはROMに記憶されている各種プログラムを実行する。RAMは各種処理の過程で得られるデータや各種処理の結果得られるデータを一時的に格納する。これらCPU、RAM、ROM等は、バスを介して接続されている。なお、CPU、ROM及びRAMはこれらの一部または全部を1チップに集積化しても構わない。
【0029】
表示部2は地図画面(目的地への経路、ナビゲーション装置20が搭載された車両(以下、「ナビゲーション装置20が搭載された車両」を「自車」ということもある。)の現在位置を示すマークなどを含む地図画像を表示する画面)やメニュー画面を表示するための表示手段である。
【0030】
操作部3はユーザが目的地を入力したり、メニューを操作したりするための入力操作手段である。なお、操作部3としては、ナビゲーション装置20本体に各種のキーやボタンを設けてもよいし、表示部2にタッチパネル機能を付加してもよい。また、操作部3としてナビゲーション装置20本体を遠隔操作するためのリモートコントローラを操作部3として用いても構わない。
【0031】
現在位置検出部4は自車の現在位置を検出するものであり、GPS受信機、自立航法手段、位置計算用CPU等を含んで構成される。自立航法手段は操角センサ、加速度センサ、距離センサや方位センサなどからなり、自車の走行距離と進行方向とをそれぞれ検出し、これらの値に基づいて現在位置を求める。また、GPS受信機は複数のGPS衛星から送られてくる電波をGPSアンテナで受信して3次元測位処理又は2次元測位処理を行って自車の絶対位置及び進行方向を計算する。ここで進行方向は現時点の自車位置と直前の自車位置とに基づいて計算される。なお、進行方向の検出方法は特に限定されず、例えばタイヤの回転方向から検出することとしてもよいし、方位センサを用いて検出してもよい。また、現在位置検出部4とは別に進行方向検出部を設けて自車の進行方向を検出するものとしてもよい。
【0032】
速度検出部5は自車の移動速度を検出する。移動速度は車速センサや加速度センサの出力から算出してもよいし、GPS履歴間の走行距離とGPS受信時刻の差から算出してもよい。なお、自車の移動速度は現在位置検出部4が検出することとしてもよい。現在位置検出部4が自車の現在位置に加えて移動速度を検出することができる場合には速度検出部5を別途設けない構成とすることができる。その場合、現在位置検出部4に速度検出部5が含まれる構成となる。
【0033】
なお、操角センサ、加速度センサ、速度センサや方位センサなどは、ナビゲーション装置20が備えていてもよいし、車両(自車)が上記各種センサを備えており、ナビゲーション装置20は、上記各種センサの出力を取得するインターフェースを備える構成としてもよい。
【0034】
地図情報記憶部6は目的地への経路探索や誘導を行う際に参照される地図情報が記憶されている。地図情報には、ネットワークデータ(ノードデータ、リンクデータ)が含まれる。また、地図情報には、地図画像が含まれていてもよいし、地図情報に含まれるネットワークデータ(ノードデータ、リンクデータ)に基づき地図画像を表示部2に描画してもよい。また、地図情報は予め地図情報記憶部6に記憶される以外にも、後述する通信部10が路側機などから地図情報を受信し、受信された地図情報が地図情報記憶部6に記憶されてもよい。
【0035】
なお、地図情報記憶部6及び後述するビーコン情報記憶部8としてはNANDフラッシュやSDメモリカードなどの記憶媒体を好適に用いることができる。各記憶部は一つの記憶媒体を共用することとしてもよいし、それぞれが記憶媒体を有することとしてもよい。また、各記憶部はナビゲーション装置20に内蔵しても構わないし、ナビゲーション装置20に着脱可能な構成としても構わない。
【0036】
本発明においては、ネットワークデータに、道路のノードデータ・リンクデータが含まれる。自車が現在走行している道路を特定する際には、制御部1が現在位置検出部4によって検出される自車の現在位置(進行方向や移動速度も加えてもよい)と地図情報とに基づき、マップマッチング処理を行うことで特定することができる。
【0037】
なお、マップマッチング処理については、制御部1が行なってもよいが、現在位置検出部4が行なってもよい。すなわち、GPS受信機及び/又は自律航法手段を用いて検出した現在位置と地図情報とに基づき、マップマッチング処理を行い、マップマッチング処理を行なった現在位置を現在位置として制御部1へ出力してもよい。或いは、制御部1のマップマッチング処理までを含めて現在位置検出部4としてもよい。
【0038】
ビーコン通信部7は道路上に設置された光ビーコンから電波、光、または赤外線を利用して様々な情報を受信する。道路上に設置されたビーコンはその通信範囲を1つの車線幅以内と限定することが可能であり、車線毎にビーコンを設置することによって、特定の車線を走行している車両に対してのみビーコン情報を送信することが可能である。
【0039】
ビーコン通信部7が光ビーコンから受信する情報は、上述したように情報中継・判定装置によって登録された提供ダウンリンク情報であり、システム情報、感知器情報、交差点情報、信号機情報、道路線形情報、規制情報等を含む。なお、これらの情報はビーコン通信部7が光ビーコンから受信する以外にも後述する通信部10がITSを介して路側機等から受信することが可能である。
【0040】
ここで各情報について簡潔に説明する。システム情報は上述したように提供サービスの内容を示す情報を含み、その他に、サービスの提供時間、サービスの稼働状態等を示す情報を含む。制御部1はシステム情報を取得することによって、どのような運転支援サービスを運転者に提供することができるかを判断することができる。本発明においてはシステム情報に提供サービスとして少なくとも追突防止支援システムが含まれるものとし、また、ナビゲーション装置20は運転者に対して追突防止支援を行う機能を備えているものとする。
【0041】
感知器情報は上述したように感知エリアの位置(範囲)を示す情報や、感知エリアに存在する車両の種別、車両・歩行者の数、現在位置、移動速度を示す情報を含む情報である。制御部1は感知器情報を取得することによって、感知エリアの状態(渋滞している、停車車両が存在する、歩行者が存在する等)を判断することができる。
【0042】
また、提供ダウンリンク情報には、減速目標速度及び減速目標位置(減速目標ライン)を示す情報が含まれる。
【0043】
以下の実施形態において、減速目標速度とは、インフラシステム設計の前提に用いる減速支援サービスにおける目標速度のことをいう。減速目標速度はサービスの内容、交差点の大きさやカーブの曲率といった道路形状等、システム適用地点の特性などに基づいて設計されるものであり、本発明の追突防止支援サービスにおいて減速目標速度は「規制速度−10km/h」を標準とし、道路形状に応じて多少変動させるものである(例えばカーブの曲率が大きい、すなわち急カーブでは減速目標速度を「規制速度−20km/h」とする。)。
【0044】
また、減速目標位置とは、車線の中央線上の地点であって、当該地点から同一中央線上の他の地点までの視距が停止視距を確保できなくなる視距未確保始点に基づいて定められる位置である。言い換えれば、上述した感知エリアの始点に対応する地点(感知エリアの始点から停止視距隔てた地点)に基づいて定められる位置である。以下、減速目標位置として、視距未確保始点を基準点として道路の横幅方向に延びるライン(減速目標ライン)を例に説明する。
【0045】
減速目標位置(減速目標ライン)までに減速目標速度とすることで、感知エリア内の車両を視認してから減速しても安全に停止でき、感知エリア内の車両に衝突する可能性を低くすることが可能である。また、減速目標速度及び/又は減速目標位置(減速目標ライン)は、感知エリア内の車両の現在位置に応じて可変されて送信されてもよい。
【0046】
交差点情報は、交差点の中心位置座標(緯度・経度)、交差点への進入方向(方路)に対応付けられた信号機の識別番号(信号機番号)、路側機(交差点)を識別するための情報、停止線の位置座標(交差点への進入方向(方路)に対応付けられた停止線の位置(緯度・経度))、交差点の始点や終点となるべき地点(交差点のノード位置座標)のノードデータ等の情報が含まれる。
【0047】
信号機情報は、信号機を識別するための識別情報(信号機番号)、信号機の現在の信号表示情報(信号機の表示色を示す情報)、現在の信号表示が次の信号表示に変更されるまでの時間を示す情報、信号表示の表示順序(信号表示のサイクルを示す情報)等の情報が含まれ、これらの情報は夫々対応付けられている。つまり、信号機情報には信号機の所定時点(現時点又は現時点以降の任意の時点)における信号表示及び/又は所定時点における信号表示が次の信号表示に変更されるまでの時間を特定可能な情報が含まれるということができる。
【0048】
道路線形情報は、対象道路区間(交差点・単路)の道路構造を示す情報であり、例えば光ビーコンから停止線までの道程距離や道路の接続角度等を示す情報が含まれる。
【0049】
規制情報は、対象区間・交差点の交通規制を示す情報であり、規制種別、規制対象車種及び規制時間等を示す情報が含まれる。
【0050】
ビーコン情報記憶部8はビーコン通信部7で受信したビーコン情報を格納する。
【0051】
バッテリ9はナビゲーション装置20の携帯使用時における電源供給手段であり、リチウムイオン電池やニッケル水素電池などの二次電池を好適に用いることが可能である。もちろん、バッテリ9として、アルカリマンガン乾電池やマンガン乾電池などの一次電池を用いても構わないし、燃料電池を用いても構わない。
【0052】
通信部10はナビゲーション装置20と通信可能な他の通信装置(以下、「他の通信装置」という。)に情報を送信する送信部(図示せず)と他の通信装置から送信される情報を受信する受信部(図示せず)とを有する。通信方法は無線通信や赤外線通信などの非接触通信とすることが好ましい。他の通信装置としては他の車両に搭載されたナビゲーション装置等の車載通信装置(他の車両に歩行者が乗車している場合において、該歩行者が保持する携帯電話等の移動通信端末でもよい)、路側機、歩行者等(歩行者や自転車の運転者など)が所持する携帯電話等の移動通信端末などを挙げることができる。
【0053】
通信部10が路側機から受信する情報は上述したように情報中継・判定装置によって登録された提供ダウンリンク情報であり、システム情報、感知器情報、交差点情報、信号機情報、道路線形情報、規制情報等を含む。
【0054】
なお、本実施例においては、通信部10は700MHz帯で送信される提供ダウンリンク情報を受信する。送信範囲はおよそ半径300m程度が考えられ、ナビゲーション装置20は、光ビーコンを通過した後(光ビーコンから提供ダウンリンク情報を受信した後)も最新の提供ダウンリンク情報を取得することが可能である。
【0055】
報知部11は各種情報を報知する報知手段である。報知手段は特に制限されないが、例えばスピーカ(不図示)を介して行われる音声案内(音声出力)、表示部2を介して行われる文字や画像等の画面表示が例として挙げられる。なお、音声出力と画面表示を同時に行うこととしてもよい。
【0056】
[第1実施形態]
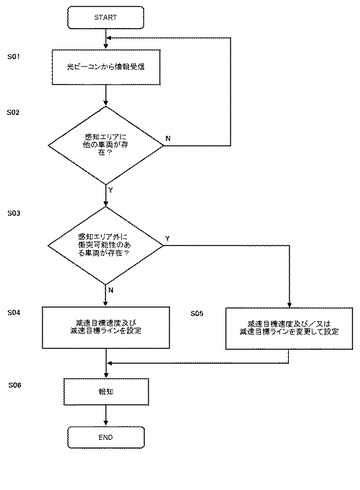
本発明のナビゲーション装置20の第1実施形態について図2を用いて説明する。図2は本発明のナビゲーション装置20の制御部1が実行する処理の流れを示す第1のフローチャートである。
【0057】
ステップS01において制御部1は通信部10を介して光ビーコンから情報を取得する。光ビーコンから取得する情報は、上述したように情報中継・判定装置によって登録された提供ダウンリンク情報であって、感知器から出力される感知器情報、DSSS下位装置から出力される道路線形情報等の情報、交通信号制御機から出力される交差点情報・信号機情報等が含まれている。
【0058】
なお、本実施形態及び以下の実施形態において制御部1は光ビーコンから情報を取得することとしているが、光ビーコンに限られるものではなく、情報中継・判定装置によって提供ダウンリンク情報を登録されるものであればよい。例えば路側機から取得することとしてもよいし、路側機及び光ビーコンの双方から取得することとしてもよい。
【0059】
なお、路側機から提供ダウンリンク情報を受信してもよいが、この場合、路側機からは広域(例えば半径300m)に提供ダウンリンク情報が送信されることが考えられるため、受信した提供ダウンリンク情報が自車に関するものか否かを判定する必要がある。
【0060】
これは、例えば、現在位置検出部4によって検出された現在位置や進行方向、及び地図情報などに基づいて、自車が走行している道路(車線)の進行方向前方に感知エリアが存在する場合に、自車に関するものとして、ステップS02以降の処理を行なうものとしてもよい。
【0061】
また、光ビーコンから受信する情報に、通信部10で受信する情報のうち自車に関する情報を特定可能な情報が含まれており、当該情報に基づいて、提供ダウンリンク情報が自車に関するものか否かを判定してもよい。
【0062】
ステップS02において制御部1は感知エリア(感知エリア内)に他の車両が存在するか否かを判定する。感知エリアに他の車両が存在するか否かは、ステップS01において取得した感知器情報に基づいて判断される。すなわち、感知器情報には感知エリアに関する情報及び感知エリアに存在する車両の情報が含まれており、例えば感知エリアに存在する車両の数を示す情報に基づいて感知エリアに他の車両が存在するか否かを判定する。
【0063】
感知エリアに他の車両が存在するときは(ステップS02のY)ステップS03に進み、感知エリアに他の車両が存在しないときは(ステップS02のN)ステップS01に戻る。
【0064】
なお、感知エリアに他の車両が存在しないときであっても、システム情報に提供サービスとして追突防止支援システムが含まれている場合、前方に死角があるカーブがあるため、ステップS04へ進み、制御部1は報知部11を介して減速目標ラインに到達するまでに自車の移動速度を減速目標速度以下にするよう促す報知を行ってもよい。
【0065】
ステップS03において制御部1は感知エリア外に追突する可能性がある他の車両(停車車両又は低速走行車両)が存在する(存在する可能性が高い)か否かを判定する。感知エリア外に追突する可能性がある他の車両が存在する(存在する可能性が高い)場合とは、感知エリア(感知エリア内)で渋滞が発生しており、その結果、その渋滞が感知エリア外にまで続いている可能性が高いと考えられる状況である。感知エリア外に追突する可能性がある他の車両が存在するか否かはステップS01において取得した感知器情報に基づいて判断される。
【0066】
感知エリア外に追突する可能性がある他の車両が存在しないと判断したときは(ステップS03のN)ステップS04に進み、感知エリア外に追突する可能性がある他の車両が存在すると判断したときは(ステップS03のY)ステップS05に進む。
【0067】
以下に感知エリア外に追突する可能性がある他の車両が存在するか否かを判定する方法について以下に例示する。
【0068】
感知エリア外に追突する可能性がある他の車両が存在するか否かを判定する第1の方法は、感知エリアの最後尾(例えば、感知エリアの始点付近)に位置する車両の移動速度に基づく方法である。すなわち、感知エリアの範囲において最後尾に位置する車両の移動速度が所定速度以下(例えば10km/h以下)である場合には、感知エリアで渋滞が発生していると考えられ、且つ、当該感知エリア最後尾の車両の後方(すなわち感知エリア外)に渋滞が続いている可能性が高いと考えられる。
【0069】
感知エリア外に追突する可能性がある他の車両が存在するか否かを判定する第2の方法は、感知エリアの範囲と感知エリアに存在する車両の種類(車種)と各車種車両の台数に基づいて感知エリアにおける車両が占める割合に基づく方法である。すなわち、車種に応じて予め定められる車両占有面積(長さでもよい)と各車種の台数とを乗じて足した車両占有総面積(長さでもよい)が感知エリア面積に対して所定割合(例えば70%以上)である場合には、感知エリアで渋滞が発生していると考えられ、且つ、当該感知エリア最後尾の車両の後方(すなわち感知エリア外)に渋滞が続いている可能性が高いと考えられる。
【0070】
感知エリア外に追突する可能性がある他の車両が存在するか否かを判定する第3の方法は、感知エリアに存在する車両数に基づく方法である。すなわち、感知エリアにおいて車両の台数が、正常に走行していれば(渋滞でなければ)感知エリアに存在することが考えにくい台数以上(所定台数以上)であれば、各車両の車間距離が近い、すなわち感知エリアで渋滞が発生していると考えられ、且つ、当該感知エリア最後尾の車両の後方(すなわち感知エリア外)に渋滞が続いている可能性が高いと考えられる。
【0071】
なお、感知エリア外に追突する可能性がある他の車両が存在するか否かを判定するための基準となる所定台数、感知エリア面積に対する車両総面積の割合(所定割合)や、所定台数は固有の値としてもよいし、感知エリアの面積、形状等に基づいて選択或いは算出することとしてもよい。
【0072】
ステップS04において制御部1は、減速目標速度及び減速目標位置(減速目標ライン)を設定する。ステップS04では、提供ダウンリンク情報に含まれる減速目標速度及び減速目標位置(減速目標ライン)が設定される。
【0073】
一方ステップS05において制御部1は、提供ダウンリンク情報に含まれる減速目標速度及び/又は減速目標ラインを変更して設定する。すなわち、ステップS05はステップS03において感知エリア外に追突する可能性がある他の車両が存在すると判断された場合の処理であることから、上述したステップS04と同様の減速目標速度及び減速目標ラインでは、感知エリア外に例えば停車車両が存在する場合にその停車車両と追突してしまうおそれがある。そこで、本ステップでは、算出された減速目標速度及び/又は減速目標ラインを変更することで、感知エリア外に追突する可能性がある他の車両が存在しているときの追突事故を未然に防ぐこととしている。
【0074】
感知エリア外(特に感知エリアよりも自車側)に追突する可能性がある他の車両が存在する場合において、減速目標速度を変更する場合には、減速目標速度をより遅い速度(例えば、急ブレーキで即座に停車ができる程度の速度)に変更し設定する。また、感知エリア外(特に感知エリアよりも自車側)に追突する可能性がある他の車両が存在する場合において、減速目標ラインを変更する場合には、減速目標ラインをより自車の現在位置に近い位置に変更し設定する。また、減速目標ラインをより自車の現在位置に近い位置に変更し、且つ、減速目標速度をより遅い速度に変更し設定する。
【0075】
ステップS06において制御部1は報知部11を介して減速目標ラインに到達するまでに自車の移動速度を減速目標速度以下にするよう促す報知を行う。音声による報知であれば例えば「前方に車両がいます。安全のため200メートル先までに速度を時速30km/h以下にしてください」と報知を行う。また、表示による報知であれば、例えば、減速目標ラインを地図画像上に表示し、且つ、画面に減速目標速度を表示する。また、音声及び表示による報知を併用する場合には、例えば、「前方に車両がいます。安全のため減速目標ラインまでに速度を時速30km/h以下にしてください」と音声報知しつつ、地図画像上に減速目標ラインを表示する。
【0076】
本実施形態によれば、感知エリアに存在する車両との事故(追突事故)を未然に防ぐ追突防止支援を行うことが可能な移動体通信装置であって、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故(追突事故)についても未然に防ぐように追突防止支援を行うことができる。より具体的には、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があると判断した時と、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在しないと判断した時とで、減速目標ライン及び/又は減速目標速度を異ならせることで、状況に応じた適切な追突防止支援を行うことができる。
[第2実施形態]
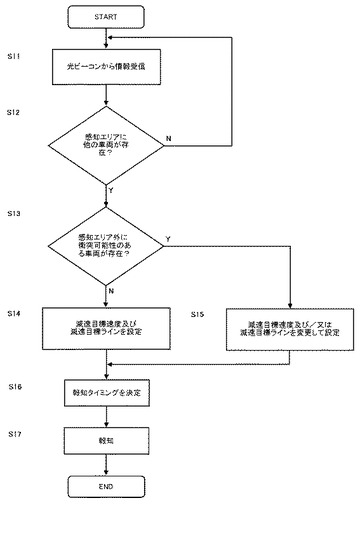
本発明のナビゲーション装置20の第2実施形態について図3を用いて説明する。図3は本発明のナビゲーション装置20の制御部1が実行する処理の流れを示す第2のフローチャートである。なお、本実施形態のステップS11〜S15、ステップS17はそれぞれ第1実施形態のステップS01〜S05、ステップS06と同様であるため説明を省略する。
【0077】
ステップS16において制御部1は報知タイミングを決定する。本実施形態においてステップS16は、報知のタイミングが遅くなることによって、減速目標ラインまでに減速目標速度とすることが困難になることを防ぐことを目的とし、適切なタイミングで報知を行うための報知タイミングを決定するものである。
【0078】
本実施形態において報知タイミングを決定するとは、どの地点(位置座標)で報知を行うかを決定することであり、到達したときに報知を行う報知ラインを決定することと言い換えることができる。報知タイミングは、減速目標速度と自車の移動速度と減速目標ラインに基づいて算出される。具体的には、自車の移動速度を減速目標速度まで落とすために必要な停止距離を算出し、減速目標ラインから道程距離で停止距離を隔てた位置を報知ラインとして、自車が当該報知ラインに到達したときに報知を行うこととして決定する。
【0079】
なお、停止距離とは、空動距離(運転者がブレーキを踏もうと考えてから、実際にブレーキを踏み、その後実際にブレーキが効き始めるまでの間に車が走る距離)と制動距離(ブレーキが効き始めてから車両を所望の速度にするまでの間に車が走る距離)とを足した距離である。
【0080】
なお、本実施形態では報知ラインを決定し、自車が報知ラインに到達したときに報知すると決定することとしたが、自車が報知ラインに到達する時間を算出し、当該時刻になったときに報知すると決定することとしてもよい。
【0081】
本実施形態によれば、第1実施形態と同様の効果を奏することができる。加えて、報知タイミングを決定するので、報知タイミングが早すぎたり、遅すぎたりすることを防止することができる。特に報知タイミングが遅れすぎることを防ぐことによって、運転者に無理な減速を強いることを防ぐことができ、交通の安全を確保しつつ、追突防止支援を行うことができる。
[第3実施形態]
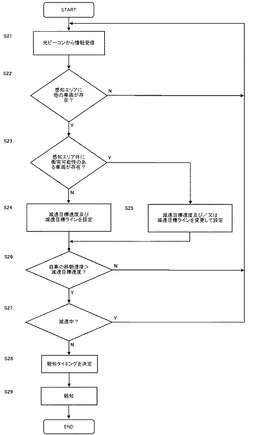
本発明のナビゲーション装置20の第3実施形態について図4を用いて説明する。図4は本発明のナビゲーション装置20の制御部1が実行する処理の流れを示す第3のフローチャートである。なお、本実施形態のステップS21〜S25、ステップS28〜S29はそれぞれ第2実施形態のステップS11〜S15、ステップS16〜17と同様であるため説明を省略する。
【0082】
ステップS26において制御部1は自車の移動速度が減速目標速度より速い否かを判定する。自車の移動速度が減速目標速度より速ければ(ステップS26のY)、ステップS27に進み、自車の移動速度が減速目標速度以下であれば(ステップS26のN)、ステップS21に戻る。
【0083】
すなわち、追突防止支援を行うにあたって、自車の移動速度が減速目標速度以下であれば、減速目標ラインに到達するまでに自車の移動速度を減速目標速度以下にするよう促す報知は過度の報知となってしまう。そこで、本実施形態においては報知前において既に自車の移動速度が減速目標速度以下であれば報知を行う必要がないものとしてステップS21に戻る。
【0084】
ステップS27において制御部1は自車が減速中であるか否かを判定する。自車が減速中であれば(ステップS27のY)、ステップS28に進み、自車が減速中でなければ(ステップS27のN)、ステップS21に戻る。
【0085】
すなわち、自車の移動速度が減速目標速度よりも速い場合であっても、自車が減速中であればその後に自車の移動速度が減速目標速度以下となると考えられるため、自車の移動速度が減速目標速度以下であれば、減速目標ラインに到達するまでに自車の移動速度を減速目標速度以下にするよう促す報知は過度の報知となってしまう。そこで、本実施形態においては報知前において、自車が減速中であれば報知を行う必要がないものとしてステップS21に戻る。
【0086】
なお、本実施形態においてステップS26のN及びステップS27のYはいずれもステップS21に戻ることとしたが、ステップS29において報知する内容を変更するこことしてもよい。すなわち、自車の移動速度が減速目標速度以下であるとき(ステップS26のN)は、報知内容を「前方に車両がいます。安全のため時速30km/h以下の速度を維持してください。」と報知することとしてもよい。また、自車が減速中のとき(ステップS27のN)は、報知内容を「前方に車両がいます。安全のため時速30km/h以下となるまで減速を継続してください。」と報知することとしてもよい。
【0087】
また、本実施形態ではステップS26及びステップS27のいずれの処理を行うこととしたが、いずれか一方の処理のみ行うこととしてもよい。また、ステップS26及びステップS27の処理を行うタイミングは本フローチャートに示すタイミングでなくてもよく、例えば報知タイミングを決定した後(ステップS28の後)であってもよい。
【0088】
本実施形態によれば第1実施形態及び第2実施形態と同様の効果を奏する。加えて、自車の移動速度が現在目標速度以下のとき及び/又は自車が減速中のときには報知が行われないので過度な報知を防ぐことができる。
[その他の実施形態]
上述した各実施形態では、感知エリアとしてカーブによって発生する死角を例に説明したが、停止視距を確保することができなくなる原因についてはなんら限定されるものではなく。すなわち、カーブによって発生するものに限られず例えばクレストによって発生する感知エリアも当然に含まれる。
【0089】
上述した各実施形態では、感知エリア外として、感知エリアよりも自車側を例に説明しているが、感知エリア外は、感知エリアから自車の反対側(自車の進行方向側)の領域であることとしてもよい。
【0090】
すなわち、(次に到達する)感知エリアが渋滞していなくても、自車の進行方向側の(次の次に到達する)感知エリア外が渋滞しているときには、その後(次に到達する)感知エリアも渋滞することとなり、その渋滞が(次に到達する)感知エリアの自車側に延びると考えられるからである。自車の進行方向側の(次の次に到達する)感知エリア外で渋滞が発生しているか否かは、さらに前方の感知器情報や車車通信等によって得られる当該領域の車両の移動速度等に基づいて判定することができる。
【0091】
なお、(次に到達する)感知エリアが渋滞しておらず、自車の進行方向側の(次の次に到達する)感知エリア外で渋滞が発生している場合には、(次に到達する)感知エリアに対応した減速目標位置(減速目標ライン)をより自車の現在位置に遠い位置に変更して報知することで、過度の減速をすることなく、(次の次に到達する)感知エリアの始点から(次に到達する)感知エリアに至るまでに存在する可能性のある車両に対して追突(衝突)を防止することができる。
【産業上の利用可能性】
【0092】
本発明は、死角となる地点に存在する車両に追突する事故を防止するように支援を行う移動体通信装置及び追突防止方法に利用することができる。
【符号の説明】
【0093】
1 制御部
2 表示部
3 操作部
4 現在位置検出部
5 速度検出部
6 地図情報記憶部
7 ビーコン受信部
8 ビーコン情報記憶部
9 バッテリ
10 通信部
11 報知部
20 ナビゲーション装置
【技術分野】
【0001】
本発明は、追突(衝突)する事故を防止するように支援を行う移動体通信装置及び追突防止支援方法に関する。
【背景技術】
【0002】
近年、情報通信技術を用いて人と道路と車両とを情報でネットワークすることにより、交通事故や渋滞などといった道路交通問題の解決を目的とした高度道路通信システム(Intelligent Transport Systems、以下「ITS」という。)が研究、開発されている。ITSの中でも特に安全運転支援システム(DSSS)を扱う分野における自動車向け無線通信の形態は路車間通信と車車間通信とに大別できる。車車間通信は車両(車載装置)同士が直接情報の通信を行うのに対し、路車間通信は路側機や光ビーコン等の道路上や道路脇に設置されている機器と車両(車載装置)とが情報の通信を行う。
【0003】
路車間通信により路側機や光ビーコン等の機器から車両に発信される情報には、提供サービスの内容を示す情報を含むシステム情報と、サービスに必要な情報が含まれるものと考えられる。例えば提供サービスとして、追突防止支援システムが含まれている場合には、車載装置が追突防止支援システムを行う(追突防止支援を運転者に提供する)ために必要な情報(例えば追突する可能性がある車両の現在位置や移動速度等を示す情報)が車載装置に提供される。
【0004】
図5は、追突防止支援システムの概念図である。図5において、車両Aは車両Bの方向に向かって進行(走行)しており、車両B〜車両Fは信号待ち(交差点Xの車両B〜車両Fに対する信号機Yの信号表示が赤信号であること)により停車しているものとする。また、車両Aが図5に示す位置に存在するときは、急カーブにより車両Aの運転者が車両Bを直接視認することができない。このような状況において、車両Aの運転者が車両Bを直接視認できる位置まで車両Aが移動したときには、車両Aと車両Bとの車間距離が短く、車両Aを停車しようとしても停車しきれずに車両Bに追突してしまうことが考えられる。
【0005】
そこで追突防止支援システムでは、例えば、カーブやクレスト(例えば坂道の頂上)によって、道路における制限速度に基づいて定められる停止視距(ドライバーが道路上の物体を認めてから停止するまでに必要な距離、詳細は後述)を確保できないエリア(死角エリア)に存在する車両の情報を提供することで、車両Aの運転者が死角エリア(感知エリアP)に存在する車両を視認することができない場合であっても、死角エリア(感知エリアP)に車両が存在することを車両Aの運転者に知らせ、減速を促す等の支援を行うことによって追突事故を防止することが考えられている。
【0006】
感知エリアに存在する車両の情報は感知器情報に含まれ、感知器情報(感知エリアの位置(範囲)を示す情報や、感知エリアに存在する車両の数、種別、速度等の情報を含む情報)は感知器から出力される。感知器から出力された感知器情報は、情報中継・判定装置と、路側機及び/又は光ビーコンとを介して車載装置に提供される。なお、交通信号制御機から出力される情報(交差点情報や信号機情報を含む情報)や、DSSS下位装置から出力される情報(道路線形情報や規制情報を含む情報)も、情報中継・判定装置と、路側機及び/又は光ビーコンとを介して車載装置に提供される。すなわち情報中継・判定装置は、情報源(DSSS下位装置、交通信号制御機、感知器)から出力された情報(受信した情報)を集約・編集して提供ダウンリンク情報(路側機や光ビーコンから車載装置に送信される情報)を路側機や光ビーコンに登録する。
【0007】
ところで上述した追突防止支援システムによれば、感知エリアで停車している車両の存在を自車の運転者に知らせることで、自車と感知エリアに存在する車両とが追突する事故を未然に防ぐことはできるが、渋滞が感知エリアだけに留まらず、感知エリア外であって、且つ自車側に続いているときには、感知器が当該感知エリア外の車両の存在を感知できないので、自車の運転者に感知エリア外に停車している車両(図6における車両H)が存在することを知らせることはできない。
【0008】
従って、車載装置が感知エリアに存在する車両のみに基づいて追突防止支援を行った場合に、運転者がその追突防止支援に従って運転すると、感知エリア外に存在する車両との間で追突事故が発生する恐れが高くなる。
【0009】
そこで特許文献1に記載されている車載情報提供装置では、自車両の遠方の領域内で交通渋滞が発生しているが、自車両周辺の領域で交通渋滞が発生していないときに、自車両の遠方の領域内に停車車両が存在していること及び自車両と自車両の遠方の領域内に存在する停車車両との距離を運転者に提供せずに、前方に停車車両が存在することのみを知らせることとしている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特許第4059151号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
しかしながら、上記特許文献1に記載されている車載情報提供装置は、検出領域外に停車車両が存在する可能性があるときに具体的な追突防止支援を行わないことで、当該追突防止支援に基づく事故が発生することを防ぐものであって、検出領域外に存在する可能性がある停車車両に追突しないようにするための追突防止支援を行うものではないため、追突防止支援としては不十分である。
【0012】
本発明は、上述した問題点に鑑み、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故を未然に防ぐ追突防止支援を行う移動体通信装置及び追突防止支援方法を提供することを目的とする。
【課題を解決するための手段】
【0013】
上記目的を達成するために本発明の移動体通信装置は、移動体に備えられ、感知エリアに存在する他の移動体の情報を含む情報を受信する通信部と、前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行う制御部と、を備える移動体通信装置であって、前記制御部は、前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判断し、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置及び/又は前記減速目標速度を変更することを特徴としている。
【0014】
また本発明は、上記構成の移動体通信装置において、前記感知エリア外は、前記感知エリア以外の領域であって、且つ、前記移動体の現在位置と前記感知エリアの始点との間の領域であり、前記制御部は、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置を前記移動体の現在位置に近い位置に変更し、及び/又は前記減速目標速度を引き下げることが望ましい。
【0015】
また本発明は、上記構成の移動体通信装置において、前記制御部は、前記移動体の移動速度が前記減速目標速度よりも速いときに前記報知を行うことが望ましい。
【0016】
また本発明は、上記構成の移動体通信装置において、前記制御部は、前記移動体が減速中であれば前記報知を行わないことが望ましい。
【0017】
また本発明は、上記構成の移動体通信装置において、前記制御部は、空走距離と制動距離とに基づいて報知タイミングを決定し、決定された報知タイミングで報知を行うことが望ましい。
【0018】
上記目的を達成するために本発明の追突防止支援方法は、感知エリアに存在する他の移動体の情報を含む情報を取得するステップと、前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行うステップと、を有する追突防止支援方法であって、前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判定するステップと、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときに、前記減速目標位置及び/又は前記減速目標速度を変更するステップと、を有することを特徴としている。
【発明の効果】
【0019】
本発明によれば、感知エリアに存在する車両との事故(追突事故)を未然に防ぐ追突防止支援を行うことが可能な移動体通信装置であって、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故(追突事故)についても未然に防ぐように追突防止支援を行うことができる。より具体的には、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があると判断した時と、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在しないと判断した時とで、減速目標位置及び/又は減速目標速度を異ならせることで、状況に応じた適切な追突防止支援を行うことができる。
【図面の簡単な説明】
【0020】
【図1】は、本発明のナビゲーション装置の構成を示すブロック図である。
【図2】は、本発明のナビゲーション装置の制御部が実行する処理の流れを示す第1のフローチャートである。
【図3】は、本発明のナビゲーション装置の制御部が実行する処理の流れを示す第2のフローチャートである。
【図4】は、本発明のナビゲーション装置の制御部が実行する処理の流れを示す第3のフローチャートである。
【図5】は、追突防止支援システムの概念図である。
【図6】は、視距ラインと感知エリアとの関係を示す模式図である。
【発明を実施するための形態】
【0021】
本発明の実施形態について説明するにあたって、まず、感知器情報について図6を参照して説明する。感知器情報とは上述したように感知器から出力される情報であり、感知エリアの範囲を示す情報、感知エリアに存在する車両に関する情報などが含まれる。感知エリアの範囲は設計速度(制限速度を基準に算出される)に基づいて定められる停止視距に基づいて定められる。停止視距は、道路構造令第119条に規定されており、例えば設計速度40kmにおける停止視距は40mと定められている。
【0022】
感知エリアの範囲について具体的に説明すると、本実施形態において感知エリアの始点は、車線の中央線(図6に示す車線の中央を示すライン)上の地点であって、中央線上の1の地点から直線距離で40m(停止視距)先にある同一中央線上の他の地点との間に障害物(曲がり角など)があって、停止視距を確保できなくなった場合における当該他の地点である。また、感知エリアの終点は、感知エリアの始点以後の地点であって、停止視距を確保できるようになった地点である。従って、感知エリアの範囲は、道路形状や対象道路の制限速度に応じて異なることになる。
【0023】
感知エリアの始点/終点を示す情報は、光ビーコンの位置座標(光ビーコンからの情報受信時の現在位置でもよい)及び光ビーコンの位置座標からの道程距離(対象地点までの距離で、道路の道なりに沿って計測される距離)、交差点の位置座標及び交差点の位置座標からの道程距離、緯度・経度(感知エリアの始点/終点自体の位置座標)などで示される。すなわち、図6において、車両Gから車両Hに対しては視距ラインL1上に障害物が存在せず停止視距が確保されているのに対して、車両Aから車両Bに対しては視距ラインL2上に障害物が存在しており停止視距が確保されていない。従って、車両Bは感知器によってその存在が検出されるが、車両Hは感知器によってその存在が検出されない。
【0024】
なお、設計速度は道路のおける制限速度としてもよいが、制限速度以上で走っていることを想定し、例えば制限速度+10km/hを設計速度としてもよいし、道路形状に応じて定めることとしてもよい(例えば自車の現在位置が急カーブであれば制限速度よりも遅い速度で走行していると想定されるので制限速度−10km/hを設計速度とする)。
【0025】
次に、感知エリアに存在する車両に関する情報について説明する。感知エリアに存在する車両の情報としては、感知エリアに存在する車両の種別(大型車、中型車又は普通車、自動二輪車など)を示す情報、車両の数を示す情報、車両の現在位置を示す情報、車両の移動速度を示す情報などが含まれている。本発明においては、感知器情報に基づいて後述するように感知エリア外に追突する可能性がある他の移動体が存在するか否か(感知エリア及び感知エリア外で渋滞が発生しているか否か)を判定する。なお、感知器が感知エリアに存在する歩行者などを感知できる場合、歩行者に関する情報(歩行者の数、現在位置、移動速度を示す情報)も含まれてもよい。
【0026】
以下に本発明の実施形態について図面を参照して説明する。但し、以下に示す実施形態は、本発明の技術的思想を具体化するために本発明の移動体通信装置の一例であるナビゲーション装置を示すものであって、本発明をこのナビゲーション装置に特定することを意図するものではなく、特許請求の範囲に含まれるその他の実施形態の装置にも等しく適応し得るものである。例えば、ナビゲーション機能を有しない装置や携帯電話等の移動通信端末であってもよい。なお、以下の説明では、ナビゲーション装置が自動車に取付けられた場合を例示するが、バイク等がナビゲーション装置を備えていてもよい。
【0027】
図1は本発明のナビゲーション装置の構成を示すブロック図である。ナビゲーション装置20は制御部1と、表示部2と、操作部3と、現在位置検出部4と、速度検出部5と、地図情報記憶部6と、ビーコン通信部7と、ビーコン情報記憶部8と、バッテリ9と、通信部10と、報知部11とを備えている。
【0028】
制御部1はナビゲーション装置20全体を総括的に制御する制御手段である。制御部1はCPUとROMとRAM(いずれも不図示)とを含んでいる。ROMには制御部1が実行するプログラム、プログラムの実行に必要なパラメータやデータが記憶されている。CPUはROMに記憶されている各種プログラムを実行する。RAMは各種処理の過程で得られるデータや各種処理の結果得られるデータを一時的に格納する。これらCPU、RAM、ROM等は、バスを介して接続されている。なお、CPU、ROM及びRAMはこれらの一部または全部を1チップに集積化しても構わない。
【0029】
表示部2は地図画面(目的地への経路、ナビゲーション装置20が搭載された車両(以下、「ナビゲーション装置20が搭載された車両」を「自車」ということもある。)の現在位置を示すマークなどを含む地図画像を表示する画面)やメニュー画面を表示するための表示手段である。
【0030】
操作部3はユーザが目的地を入力したり、メニューを操作したりするための入力操作手段である。なお、操作部3としては、ナビゲーション装置20本体に各種のキーやボタンを設けてもよいし、表示部2にタッチパネル機能を付加してもよい。また、操作部3としてナビゲーション装置20本体を遠隔操作するためのリモートコントローラを操作部3として用いても構わない。
【0031】
現在位置検出部4は自車の現在位置を検出するものであり、GPS受信機、自立航法手段、位置計算用CPU等を含んで構成される。自立航法手段は操角センサ、加速度センサ、距離センサや方位センサなどからなり、自車の走行距離と進行方向とをそれぞれ検出し、これらの値に基づいて現在位置を求める。また、GPS受信機は複数のGPS衛星から送られてくる電波をGPSアンテナで受信して3次元測位処理又は2次元測位処理を行って自車の絶対位置及び進行方向を計算する。ここで進行方向は現時点の自車位置と直前の自車位置とに基づいて計算される。なお、進行方向の検出方法は特に限定されず、例えばタイヤの回転方向から検出することとしてもよいし、方位センサを用いて検出してもよい。また、現在位置検出部4とは別に進行方向検出部を設けて自車の進行方向を検出するものとしてもよい。
【0032】
速度検出部5は自車の移動速度を検出する。移動速度は車速センサや加速度センサの出力から算出してもよいし、GPS履歴間の走行距離とGPS受信時刻の差から算出してもよい。なお、自車の移動速度は現在位置検出部4が検出することとしてもよい。現在位置検出部4が自車の現在位置に加えて移動速度を検出することができる場合には速度検出部5を別途設けない構成とすることができる。その場合、現在位置検出部4に速度検出部5が含まれる構成となる。
【0033】
なお、操角センサ、加速度センサ、速度センサや方位センサなどは、ナビゲーション装置20が備えていてもよいし、車両(自車)が上記各種センサを備えており、ナビゲーション装置20は、上記各種センサの出力を取得するインターフェースを備える構成としてもよい。
【0034】
地図情報記憶部6は目的地への経路探索や誘導を行う際に参照される地図情報が記憶されている。地図情報には、ネットワークデータ(ノードデータ、リンクデータ)が含まれる。また、地図情報には、地図画像が含まれていてもよいし、地図情報に含まれるネットワークデータ(ノードデータ、リンクデータ)に基づき地図画像を表示部2に描画してもよい。また、地図情報は予め地図情報記憶部6に記憶される以外にも、後述する通信部10が路側機などから地図情報を受信し、受信された地図情報が地図情報記憶部6に記憶されてもよい。
【0035】
なお、地図情報記憶部6及び後述するビーコン情報記憶部8としてはNANDフラッシュやSDメモリカードなどの記憶媒体を好適に用いることができる。各記憶部は一つの記憶媒体を共用することとしてもよいし、それぞれが記憶媒体を有することとしてもよい。また、各記憶部はナビゲーション装置20に内蔵しても構わないし、ナビゲーション装置20に着脱可能な構成としても構わない。
【0036】
本発明においては、ネットワークデータに、道路のノードデータ・リンクデータが含まれる。自車が現在走行している道路を特定する際には、制御部1が現在位置検出部4によって検出される自車の現在位置(進行方向や移動速度も加えてもよい)と地図情報とに基づき、マップマッチング処理を行うことで特定することができる。
【0037】
なお、マップマッチング処理については、制御部1が行なってもよいが、現在位置検出部4が行なってもよい。すなわち、GPS受信機及び/又は自律航法手段を用いて検出した現在位置と地図情報とに基づき、マップマッチング処理を行い、マップマッチング処理を行なった現在位置を現在位置として制御部1へ出力してもよい。或いは、制御部1のマップマッチング処理までを含めて現在位置検出部4としてもよい。
【0038】
ビーコン通信部7は道路上に設置された光ビーコンから電波、光、または赤外線を利用して様々な情報を受信する。道路上に設置されたビーコンはその通信範囲を1つの車線幅以内と限定することが可能であり、車線毎にビーコンを設置することによって、特定の車線を走行している車両に対してのみビーコン情報を送信することが可能である。
【0039】
ビーコン通信部7が光ビーコンから受信する情報は、上述したように情報中継・判定装置によって登録された提供ダウンリンク情報であり、システム情報、感知器情報、交差点情報、信号機情報、道路線形情報、規制情報等を含む。なお、これらの情報はビーコン通信部7が光ビーコンから受信する以外にも後述する通信部10がITSを介して路側機等から受信することが可能である。
【0040】
ここで各情報について簡潔に説明する。システム情報は上述したように提供サービスの内容を示す情報を含み、その他に、サービスの提供時間、サービスの稼働状態等を示す情報を含む。制御部1はシステム情報を取得することによって、どのような運転支援サービスを運転者に提供することができるかを判断することができる。本発明においてはシステム情報に提供サービスとして少なくとも追突防止支援システムが含まれるものとし、また、ナビゲーション装置20は運転者に対して追突防止支援を行う機能を備えているものとする。
【0041】
感知器情報は上述したように感知エリアの位置(範囲)を示す情報や、感知エリアに存在する車両の種別、車両・歩行者の数、現在位置、移動速度を示す情報を含む情報である。制御部1は感知器情報を取得することによって、感知エリアの状態(渋滞している、停車車両が存在する、歩行者が存在する等)を判断することができる。
【0042】
また、提供ダウンリンク情報には、減速目標速度及び減速目標位置(減速目標ライン)を示す情報が含まれる。
【0043】
以下の実施形態において、減速目標速度とは、インフラシステム設計の前提に用いる減速支援サービスにおける目標速度のことをいう。減速目標速度はサービスの内容、交差点の大きさやカーブの曲率といった道路形状等、システム適用地点の特性などに基づいて設計されるものであり、本発明の追突防止支援サービスにおいて減速目標速度は「規制速度−10km/h」を標準とし、道路形状に応じて多少変動させるものである(例えばカーブの曲率が大きい、すなわち急カーブでは減速目標速度を「規制速度−20km/h」とする。)。
【0044】
また、減速目標位置とは、車線の中央線上の地点であって、当該地点から同一中央線上の他の地点までの視距が停止視距を確保できなくなる視距未確保始点に基づいて定められる位置である。言い換えれば、上述した感知エリアの始点に対応する地点(感知エリアの始点から停止視距隔てた地点)に基づいて定められる位置である。以下、減速目標位置として、視距未確保始点を基準点として道路の横幅方向に延びるライン(減速目標ライン)を例に説明する。
【0045】
減速目標位置(減速目標ライン)までに減速目標速度とすることで、感知エリア内の車両を視認してから減速しても安全に停止でき、感知エリア内の車両に衝突する可能性を低くすることが可能である。また、減速目標速度及び/又は減速目標位置(減速目標ライン)は、感知エリア内の車両の現在位置に応じて可変されて送信されてもよい。
【0046】
交差点情報は、交差点の中心位置座標(緯度・経度)、交差点への進入方向(方路)に対応付けられた信号機の識別番号(信号機番号)、路側機(交差点)を識別するための情報、停止線の位置座標(交差点への進入方向(方路)に対応付けられた停止線の位置(緯度・経度))、交差点の始点や終点となるべき地点(交差点のノード位置座標)のノードデータ等の情報が含まれる。
【0047】
信号機情報は、信号機を識別するための識別情報(信号機番号)、信号機の現在の信号表示情報(信号機の表示色を示す情報)、現在の信号表示が次の信号表示に変更されるまでの時間を示す情報、信号表示の表示順序(信号表示のサイクルを示す情報)等の情報が含まれ、これらの情報は夫々対応付けられている。つまり、信号機情報には信号機の所定時点(現時点又は現時点以降の任意の時点)における信号表示及び/又は所定時点における信号表示が次の信号表示に変更されるまでの時間を特定可能な情報が含まれるということができる。
【0048】
道路線形情報は、対象道路区間(交差点・単路)の道路構造を示す情報であり、例えば光ビーコンから停止線までの道程距離や道路の接続角度等を示す情報が含まれる。
【0049】
規制情報は、対象区間・交差点の交通規制を示す情報であり、規制種別、規制対象車種及び規制時間等を示す情報が含まれる。
【0050】
ビーコン情報記憶部8はビーコン通信部7で受信したビーコン情報を格納する。
【0051】
バッテリ9はナビゲーション装置20の携帯使用時における電源供給手段であり、リチウムイオン電池やニッケル水素電池などの二次電池を好適に用いることが可能である。もちろん、バッテリ9として、アルカリマンガン乾電池やマンガン乾電池などの一次電池を用いても構わないし、燃料電池を用いても構わない。
【0052】
通信部10はナビゲーション装置20と通信可能な他の通信装置(以下、「他の通信装置」という。)に情報を送信する送信部(図示せず)と他の通信装置から送信される情報を受信する受信部(図示せず)とを有する。通信方法は無線通信や赤外線通信などの非接触通信とすることが好ましい。他の通信装置としては他の車両に搭載されたナビゲーション装置等の車載通信装置(他の車両に歩行者が乗車している場合において、該歩行者が保持する携帯電話等の移動通信端末でもよい)、路側機、歩行者等(歩行者や自転車の運転者など)が所持する携帯電話等の移動通信端末などを挙げることができる。
【0053】
通信部10が路側機から受信する情報は上述したように情報中継・判定装置によって登録された提供ダウンリンク情報であり、システム情報、感知器情報、交差点情報、信号機情報、道路線形情報、規制情報等を含む。
【0054】
なお、本実施例においては、通信部10は700MHz帯で送信される提供ダウンリンク情報を受信する。送信範囲はおよそ半径300m程度が考えられ、ナビゲーション装置20は、光ビーコンを通過した後(光ビーコンから提供ダウンリンク情報を受信した後)も最新の提供ダウンリンク情報を取得することが可能である。
【0055】
報知部11は各種情報を報知する報知手段である。報知手段は特に制限されないが、例えばスピーカ(不図示)を介して行われる音声案内(音声出力)、表示部2を介して行われる文字や画像等の画面表示が例として挙げられる。なお、音声出力と画面表示を同時に行うこととしてもよい。
【0056】
[第1実施形態]
本発明のナビゲーション装置20の第1実施形態について図2を用いて説明する。図2は本発明のナビゲーション装置20の制御部1が実行する処理の流れを示す第1のフローチャートである。
【0057】
ステップS01において制御部1は通信部10を介して光ビーコンから情報を取得する。光ビーコンから取得する情報は、上述したように情報中継・判定装置によって登録された提供ダウンリンク情報であって、感知器から出力される感知器情報、DSSS下位装置から出力される道路線形情報等の情報、交通信号制御機から出力される交差点情報・信号機情報等が含まれている。
【0058】
なお、本実施形態及び以下の実施形態において制御部1は光ビーコンから情報を取得することとしているが、光ビーコンに限られるものではなく、情報中継・判定装置によって提供ダウンリンク情報を登録されるものであればよい。例えば路側機から取得することとしてもよいし、路側機及び光ビーコンの双方から取得することとしてもよい。
【0059】
なお、路側機から提供ダウンリンク情報を受信してもよいが、この場合、路側機からは広域(例えば半径300m)に提供ダウンリンク情報が送信されることが考えられるため、受信した提供ダウンリンク情報が自車に関するものか否かを判定する必要がある。
【0060】
これは、例えば、現在位置検出部4によって検出された現在位置や進行方向、及び地図情報などに基づいて、自車が走行している道路(車線)の進行方向前方に感知エリアが存在する場合に、自車に関するものとして、ステップS02以降の処理を行なうものとしてもよい。
【0061】
また、光ビーコンから受信する情報に、通信部10で受信する情報のうち自車に関する情報を特定可能な情報が含まれており、当該情報に基づいて、提供ダウンリンク情報が自車に関するものか否かを判定してもよい。
【0062】
ステップS02において制御部1は感知エリア(感知エリア内)に他の車両が存在するか否かを判定する。感知エリアに他の車両が存在するか否かは、ステップS01において取得した感知器情報に基づいて判断される。すなわち、感知器情報には感知エリアに関する情報及び感知エリアに存在する車両の情報が含まれており、例えば感知エリアに存在する車両の数を示す情報に基づいて感知エリアに他の車両が存在するか否かを判定する。
【0063】
感知エリアに他の車両が存在するときは(ステップS02のY)ステップS03に進み、感知エリアに他の車両が存在しないときは(ステップS02のN)ステップS01に戻る。
【0064】
なお、感知エリアに他の車両が存在しないときであっても、システム情報に提供サービスとして追突防止支援システムが含まれている場合、前方に死角があるカーブがあるため、ステップS04へ進み、制御部1は報知部11を介して減速目標ラインに到達するまでに自車の移動速度を減速目標速度以下にするよう促す報知を行ってもよい。
【0065】
ステップS03において制御部1は感知エリア外に追突する可能性がある他の車両(停車車両又は低速走行車両)が存在する(存在する可能性が高い)か否かを判定する。感知エリア外に追突する可能性がある他の車両が存在する(存在する可能性が高い)場合とは、感知エリア(感知エリア内)で渋滞が発生しており、その結果、その渋滞が感知エリア外にまで続いている可能性が高いと考えられる状況である。感知エリア外に追突する可能性がある他の車両が存在するか否かはステップS01において取得した感知器情報に基づいて判断される。
【0066】
感知エリア外に追突する可能性がある他の車両が存在しないと判断したときは(ステップS03のN)ステップS04に進み、感知エリア外に追突する可能性がある他の車両が存在すると判断したときは(ステップS03のY)ステップS05に進む。
【0067】
以下に感知エリア外に追突する可能性がある他の車両が存在するか否かを判定する方法について以下に例示する。
【0068】
感知エリア外に追突する可能性がある他の車両が存在するか否かを判定する第1の方法は、感知エリアの最後尾(例えば、感知エリアの始点付近)に位置する車両の移動速度に基づく方法である。すなわち、感知エリアの範囲において最後尾に位置する車両の移動速度が所定速度以下(例えば10km/h以下)である場合には、感知エリアで渋滞が発生していると考えられ、且つ、当該感知エリア最後尾の車両の後方(すなわち感知エリア外)に渋滞が続いている可能性が高いと考えられる。
【0069】
感知エリア外に追突する可能性がある他の車両が存在するか否かを判定する第2の方法は、感知エリアの範囲と感知エリアに存在する車両の種類(車種)と各車種車両の台数に基づいて感知エリアにおける車両が占める割合に基づく方法である。すなわち、車種に応じて予め定められる車両占有面積(長さでもよい)と各車種の台数とを乗じて足した車両占有総面積(長さでもよい)が感知エリア面積に対して所定割合(例えば70%以上)である場合には、感知エリアで渋滞が発生していると考えられ、且つ、当該感知エリア最後尾の車両の後方(すなわち感知エリア外)に渋滞が続いている可能性が高いと考えられる。
【0070】
感知エリア外に追突する可能性がある他の車両が存在するか否かを判定する第3の方法は、感知エリアに存在する車両数に基づく方法である。すなわち、感知エリアにおいて車両の台数が、正常に走行していれば(渋滞でなければ)感知エリアに存在することが考えにくい台数以上(所定台数以上)であれば、各車両の車間距離が近い、すなわち感知エリアで渋滞が発生していると考えられ、且つ、当該感知エリア最後尾の車両の後方(すなわち感知エリア外)に渋滞が続いている可能性が高いと考えられる。
【0071】
なお、感知エリア外に追突する可能性がある他の車両が存在するか否かを判定するための基準となる所定台数、感知エリア面積に対する車両総面積の割合(所定割合)や、所定台数は固有の値としてもよいし、感知エリアの面積、形状等に基づいて選択或いは算出することとしてもよい。
【0072】
ステップS04において制御部1は、減速目標速度及び減速目標位置(減速目標ライン)を設定する。ステップS04では、提供ダウンリンク情報に含まれる減速目標速度及び減速目標位置(減速目標ライン)が設定される。
【0073】
一方ステップS05において制御部1は、提供ダウンリンク情報に含まれる減速目標速度及び/又は減速目標ラインを変更して設定する。すなわち、ステップS05はステップS03において感知エリア外に追突する可能性がある他の車両が存在すると判断された場合の処理であることから、上述したステップS04と同様の減速目標速度及び減速目標ラインでは、感知エリア外に例えば停車車両が存在する場合にその停車車両と追突してしまうおそれがある。そこで、本ステップでは、算出された減速目標速度及び/又は減速目標ラインを変更することで、感知エリア外に追突する可能性がある他の車両が存在しているときの追突事故を未然に防ぐこととしている。
【0074】
感知エリア外(特に感知エリアよりも自車側)に追突する可能性がある他の車両が存在する場合において、減速目標速度を変更する場合には、減速目標速度をより遅い速度(例えば、急ブレーキで即座に停車ができる程度の速度)に変更し設定する。また、感知エリア外(特に感知エリアよりも自車側)に追突する可能性がある他の車両が存在する場合において、減速目標ラインを変更する場合には、減速目標ラインをより自車の現在位置に近い位置に変更し設定する。また、減速目標ラインをより自車の現在位置に近い位置に変更し、且つ、減速目標速度をより遅い速度に変更し設定する。
【0075】
ステップS06において制御部1は報知部11を介して減速目標ラインに到達するまでに自車の移動速度を減速目標速度以下にするよう促す報知を行う。音声による報知であれば例えば「前方に車両がいます。安全のため200メートル先までに速度を時速30km/h以下にしてください」と報知を行う。また、表示による報知であれば、例えば、減速目標ラインを地図画像上に表示し、且つ、画面に減速目標速度を表示する。また、音声及び表示による報知を併用する場合には、例えば、「前方に車両がいます。安全のため減速目標ラインまでに速度を時速30km/h以下にしてください」と音声報知しつつ、地図画像上に減速目標ラインを表示する。
【0076】
本実施形態によれば、感知エリアに存在する車両との事故(追突事故)を未然に防ぐ追突防止支援を行うことが可能な移動体通信装置であって、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があるときに、当該追突する可能性がある他の移動体(他の車両)との事故(追突事故)についても未然に防ぐように追突防止支援を行うことができる。より具体的には、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在する可能性があると判断した時と、感知エリア外に追突する可能性がある他の移動体(他の車両)が存在しないと判断した時とで、減速目標ライン及び/又は減速目標速度を異ならせることで、状況に応じた適切な追突防止支援を行うことができる。
[第2実施形態]
本発明のナビゲーション装置20の第2実施形態について図3を用いて説明する。図3は本発明のナビゲーション装置20の制御部1が実行する処理の流れを示す第2のフローチャートである。なお、本実施形態のステップS11〜S15、ステップS17はそれぞれ第1実施形態のステップS01〜S05、ステップS06と同様であるため説明を省略する。
【0077】
ステップS16において制御部1は報知タイミングを決定する。本実施形態においてステップS16は、報知のタイミングが遅くなることによって、減速目標ラインまでに減速目標速度とすることが困難になることを防ぐことを目的とし、適切なタイミングで報知を行うための報知タイミングを決定するものである。
【0078】
本実施形態において報知タイミングを決定するとは、どの地点(位置座標)で報知を行うかを決定することであり、到達したときに報知を行う報知ラインを決定することと言い換えることができる。報知タイミングは、減速目標速度と自車の移動速度と減速目標ラインに基づいて算出される。具体的には、自車の移動速度を減速目標速度まで落とすために必要な停止距離を算出し、減速目標ラインから道程距離で停止距離を隔てた位置を報知ラインとして、自車が当該報知ラインに到達したときに報知を行うこととして決定する。
【0079】
なお、停止距離とは、空動距離(運転者がブレーキを踏もうと考えてから、実際にブレーキを踏み、その後実際にブレーキが効き始めるまでの間に車が走る距離)と制動距離(ブレーキが効き始めてから車両を所望の速度にするまでの間に車が走る距離)とを足した距離である。
【0080】
なお、本実施形態では報知ラインを決定し、自車が報知ラインに到達したときに報知すると決定することとしたが、自車が報知ラインに到達する時間を算出し、当該時刻になったときに報知すると決定することとしてもよい。
【0081】
本実施形態によれば、第1実施形態と同様の効果を奏することができる。加えて、報知タイミングを決定するので、報知タイミングが早すぎたり、遅すぎたりすることを防止することができる。特に報知タイミングが遅れすぎることを防ぐことによって、運転者に無理な減速を強いることを防ぐことができ、交通の安全を確保しつつ、追突防止支援を行うことができる。
[第3実施形態]
本発明のナビゲーション装置20の第3実施形態について図4を用いて説明する。図4は本発明のナビゲーション装置20の制御部1が実行する処理の流れを示す第3のフローチャートである。なお、本実施形態のステップS21〜S25、ステップS28〜S29はそれぞれ第2実施形態のステップS11〜S15、ステップS16〜17と同様であるため説明を省略する。
【0082】
ステップS26において制御部1は自車の移動速度が減速目標速度より速い否かを判定する。自車の移動速度が減速目標速度より速ければ(ステップS26のY)、ステップS27に進み、自車の移動速度が減速目標速度以下であれば(ステップS26のN)、ステップS21に戻る。
【0083】
すなわち、追突防止支援を行うにあたって、自車の移動速度が減速目標速度以下であれば、減速目標ラインに到達するまでに自車の移動速度を減速目標速度以下にするよう促す報知は過度の報知となってしまう。そこで、本実施形態においては報知前において既に自車の移動速度が減速目標速度以下であれば報知を行う必要がないものとしてステップS21に戻る。
【0084】
ステップS27において制御部1は自車が減速中であるか否かを判定する。自車が減速中であれば(ステップS27のY)、ステップS28に進み、自車が減速中でなければ(ステップS27のN)、ステップS21に戻る。
【0085】
すなわち、自車の移動速度が減速目標速度よりも速い場合であっても、自車が減速中であればその後に自車の移動速度が減速目標速度以下となると考えられるため、自車の移動速度が減速目標速度以下であれば、減速目標ラインに到達するまでに自車の移動速度を減速目標速度以下にするよう促す報知は過度の報知となってしまう。そこで、本実施形態においては報知前において、自車が減速中であれば報知を行う必要がないものとしてステップS21に戻る。
【0086】
なお、本実施形態においてステップS26のN及びステップS27のYはいずれもステップS21に戻ることとしたが、ステップS29において報知する内容を変更するこことしてもよい。すなわち、自車の移動速度が減速目標速度以下であるとき(ステップS26のN)は、報知内容を「前方に車両がいます。安全のため時速30km/h以下の速度を維持してください。」と報知することとしてもよい。また、自車が減速中のとき(ステップS27のN)は、報知内容を「前方に車両がいます。安全のため時速30km/h以下となるまで減速を継続してください。」と報知することとしてもよい。
【0087】
また、本実施形態ではステップS26及びステップS27のいずれの処理を行うこととしたが、いずれか一方の処理のみ行うこととしてもよい。また、ステップS26及びステップS27の処理を行うタイミングは本フローチャートに示すタイミングでなくてもよく、例えば報知タイミングを決定した後(ステップS28の後)であってもよい。
【0088】
本実施形態によれば第1実施形態及び第2実施形態と同様の効果を奏する。加えて、自車の移動速度が現在目標速度以下のとき及び/又は自車が減速中のときには報知が行われないので過度な報知を防ぐことができる。
[その他の実施形態]
上述した各実施形態では、感知エリアとしてカーブによって発生する死角を例に説明したが、停止視距を確保することができなくなる原因についてはなんら限定されるものではなく。すなわち、カーブによって発生するものに限られず例えばクレストによって発生する感知エリアも当然に含まれる。
【0089】
上述した各実施形態では、感知エリア外として、感知エリアよりも自車側を例に説明しているが、感知エリア外は、感知エリアから自車の反対側(自車の進行方向側)の領域であることとしてもよい。
【0090】
すなわち、(次に到達する)感知エリアが渋滞していなくても、自車の進行方向側の(次の次に到達する)感知エリア外が渋滞しているときには、その後(次に到達する)感知エリアも渋滞することとなり、その渋滞が(次に到達する)感知エリアの自車側に延びると考えられるからである。自車の進行方向側の(次の次に到達する)感知エリア外で渋滞が発生しているか否かは、さらに前方の感知器情報や車車通信等によって得られる当該領域の車両の移動速度等に基づいて判定することができる。
【0091】
なお、(次に到達する)感知エリアが渋滞しておらず、自車の進行方向側の(次の次に到達する)感知エリア外で渋滞が発生している場合には、(次に到達する)感知エリアに対応した減速目標位置(減速目標ライン)をより自車の現在位置に遠い位置に変更して報知することで、過度の減速をすることなく、(次の次に到達する)感知エリアの始点から(次に到達する)感知エリアに至るまでに存在する可能性のある車両に対して追突(衝突)を防止することができる。
【産業上の利用可能性】
【0092】
本発明は、死角となる地点に存在する車両に追突する事故を防止するように支援を行う移動体通信装置及び追突防止方法に利用することができる。
【符号の説明】
【0093】
1 制御部
2 表示部
3 操作部
4 現在位置検出部
5 速度検出部
6 地図情報記憶部
7 ビーコン受信部
8 ビーコン情報記憶部
9 バッテリ
10 通信部
11 報知部
20 ナビゲーション装置
【特許請求の範囲】
【請求項1】
移動体に備えられ、
感知エリアに存在する他の移動体の情報を含む情報を受信する通信部と、
前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行う制御部と、
を備える移動体通信装置であって、
前記制御部は、前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判断し、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置及び/又は前記減速目標速度を変更することを特徴とする移動体通信装置。
【請求項2】
前記感知エリア外は、前記感知エリア以外の領域であって、且つ、前記移動体の現在位置と前記感知エリアの始点との間の領域であり、
前記制御部は、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置を前記移動体の現在位置に近い位置に変更し、及び/又は前記減速目標速度を引き下げることを特徴とする請求項1に記載の移動体通信装置。
【請求項3】
前記制御部は、前記移動体の移動速度が前記減速目標速度よりも速いときに前記報知を行うことを特徴とする請求項1又は請求項2に記載の移動体通信装置。
【請求項4】
前記制御部は、前記移動体が減速中であれば前記報知を行わないことを特徴とする請求項1〜請求項3のいずれか1項に記載の移動体通信装置。
【請求項5】
前記制御部は、空走距離と制動距離とに基づいて報知タイミングを決定し、決定された報知タイミングで報知を行うことを特徴とする請求項1〜請求項4のいずれか1項に記載の移動体通信装置。
【請求項6】
感知エリアに存在する他の移動体の情報を含む情報を取得するステップと、
前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行うステップと、
を有する追突防止支援方法であって、
前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判定するステップと、
前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときに、前記減速目標位置及び/又は前記減速目標速度を変更するステップと、
を有することを特徴とする追突防止支援方法。
【請求項1】
移動体に備えられ、
感知エリアに存在する他の移動体の情報を含む情報を受信する通信部と、
前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行う制御部と、
を備える移動体通信装置であって、
前記制御部は、前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判断し、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置及び/又は前記減速目標速度を変更することを特徴とする移動体通信装置。
【請求項2】
前記感知エリア外は、前記感知エリア以外の領域であって、且つ、前記移動体の現在位置と前記感知エリアの始点との間の領域であり、
前記制御部は、前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときは、前記減速目標位置を前記移動体の現在位置に近い位置に変更し、及び/又は前記減速目標速度を引き下げることを特徴とする請求項1に記載の移動体通信装置。
【請求項3】
前記制御部は、前記移動体の移動速度が前記減速目標速度よりも速いときに前記報知を行うことを特徴とする請求項1又は請求項2に記載の移動体通信装置。
【請求項4】
前記制御部は、前記移動体が減速中であれば前記報知を行わないことを特徴とする請求項1〜請求項3のいずれか1項に記載の移動体通信装置。
【請求項5】
前記制御部は、空走距離と制動距離とに基づいて報知タイミングを決定し、決定された報知タイミングで報知を行うことを特徴とする請求項1〜請求項4のいずれか1項に記載の移動体通信装置。
【請求項6】
感知エリアに存在する他の移動体の情報を含む情報を取得するステップと、
前記感知エリアに他の移動体が存在するときに、報知部を介して減速目標位置に到達するまでに前記移動体の移動速度を減速目標速度にするよう報知を行うステップと、
を有する追突防止支援方法であって、
前記感知エリアに存在する他の移動体の情報に基づいて、前記感知エリア外に追突する可能性がある他の移動体が存在するか否かを判定するステップと、
前記感知エリア外に追突する可能性がある他の移動体が存在すると判断したときに、前記減速目標位置及び/又は前記減速目標速度を変更するステップと、
を有することを特徴とする追突防止支援方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−50803(P2013−50803A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2011−187613(P2011−187613)
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成23年8月30日(2011.8.30)
【出願人】(000001889)三洋電機株式会社 (18,308)
【Fターム(参考)】
[ Back to top ]