
空中飛行体の打ち上げ方法および装置
成層圏内の「永久的な」飛行用に意図された、空気より重い空中飛行体1、特に長航続時間の、太陽エネルギーを動力とする、無人空中飛行体(UAV)が、ヘリウム気球16から繋ぎ綱14で吊り下げられてその機能を果す高度に搬送される。この繋ぎ綱は、UAVが90°傾いた姿勢で効率よく搬送されるように、UAV翼3の先端部に、または先端部に向かって取り付けられる。所望の高度で、UAVの動力装置が始動し、UAVは、繋ぎ綱14が解放されUAVが自由飛行を取ることが許されるときの水平、またはほとんど水平な姿勢に到達するまで、気球に対して相対的な上向きの螺旋状経路でその繋ぎ綱に吊るされて飛行する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は空中飛行体の打ち上げに関し、より詳細には(限定はしないが)、高高度の、長航続時間の、太陽エネルギーを動力とする、翼のある、無人空中飛行体(UAVs)の打ち上げに関する。
【背景技術】
【0002】
太陽エネルギーを動力とするUAVsは、通信中継、地球監視、気象観測、偵察および地図作成などの役割のために、成層圏高度(通常は15000と30000mの間)で飛行する長航続時間の航空プラットフォームとして使用するために提案されてきた。この点でそれらは、従来これらの目的のために使用されている地球の周囲を軌道を描いて回転する人工衛星に対しコスト効率の高い代替品を提供する可能性があり、それらを地球の選択された地域が見えるところに留まらせる、または任意の別の選択された場所に飛行させるように容易に制御できるという追加の利点を有する。そのような飛行体は、少なくとも1つの航空力学的な揚力表面(翼)、1つ又は複数の電気的に駆動される推進力発生モータ、光電池のアレイ、および再充電可能なバッテリーまたは再生式の燃料電池などの電気貯蔵手段を含む軽量な構造を備える。そのような飛行体の一例は、米国特許第5810284号明細書、国際公開第01/58756号パンフレット、国際公開第01/58757号パンフレット、国際公開第01/58758号パンフレットに開示されている。原理的にこの種の飛行体は、日光のある時間中は光電池によって発生する電力が高出力でモータを駆動し、飛行体をベース動作高度からより高い動作高度に上昇させ、かつ、電気貯蔵手段に充電し、暗い時間中はモータが貯蔵手段からのより低い動力で駆動され、飛行体は(依然として成層圏であるが)ベース動作高度に降下する毎日の飛行パターンに従って、無期限に空中に留まることができ、それらの機械的構成部品の信頼性および機体完全性によってのみ制限される。
【0003】
成層圏内の大気状態は一般に温和であり、これは、成層圏内でのみ飛行するように設計される機体は、大気圏の変化する大気状態内で飛行するように設計される機体よりも頑丈でなくすることができ、したがって、より軽くすることができる。さらに、機体重量の最小化は、動力供給が搭載された光電池によって日光のある間に発生させることができる電気に制限される長航続時間飛行体の成功のために特に重要である。
【0004】
米国特許第5810284号明細書他に開示されるなどの、高高度の、太陽エネルギーを動力とするUAVが最初にその動作高度に打ち上げられる従来の方法は、それを地上からそれ自体の動力の下で上がらせるものである。しかしながらこれは、大気圏の乱流領域を通過する飛行によって加えられる追加の負荷に対処するために、機体が十分強く(したがって、重く)なければならない(したがって、それが運搬することができる最大積載重量に望ましくない制限を課す)こと、かつ/または上昇中に機体損傷のリスクがあること、かつ/またはその打ち上げが最も良好な気象条件を待たなければならないことを意味する。
【0005】
米国特許第4697761号明細書は、空気より軽い気球の外皮内に90°傾いた姿勢で吊るされて空中に搬送される、太陽エネルギーを動力とするUAVの打ち上げの代替方法を開示する。所望の高度に到達すると、気球の下端部が繰り広げられ、少し遅れた後UAVが解放され、それ自体の動力で水平飛行を担う以前は気球から自由落下する。自由落下する90°傾いた姿勢から水平飛行に移るために必要な航空力学的制御についての詳細は何も提供されていない。しかしながら、気球からの落下から回復する機体にかなりの力が加えられる可能性が高く、この場合も通常の成層圏飛行に要求される機体より強く(したがって、重く)しなければならないことを意味する。
【発明の開示】
【発明が解決しようとする課題】
【0006】
上記で述べた従来技術の打ち上げ方法の欠点を防止することが、本発明の1つの目的である。
【課題を解決するための手段】
【0007】
したがって、一態様では、本発明は、少なくとも1つの航空力学的揚力表面および推進力発生動力装置を備える、空気より重い空中飛行体を打ち上げる方法にあり、この方法は、空気より重い空中飛行体を空気より軽い飛行体によって所望の高度に上昇させる段階と、前記所望の高度に達したとき、空気より軽い飛行体から前記揚力表面の先端またはその先端に向かって空気より重い飛行体に取り付けられた繋ぎ綱によって吊るされた空気より重い飛行体に推進力を発生させるために動力装置を動作させ、それによって繋ぎ綱で繋がれた空気より重い飛行体に空気より軽い飛行体に対し相対的な上向きの螺旋状の経路を描かせる段階と、空気より重い飛行体が所望の姿勢に到達したとき、空気より重い飛行体の自由飛行を許すために、前記繋ぎ綱を開放する段階とを備える。
【0008】
本発明による方法は、長航続時間の、太陽エネルギーを動力とするUAVの成層圏高度への打ち上げに特に適用可能であり、大気圏を通りそれ自体の動力で飛行するための、または空気より軽い飛行体から解放された自由落下の通常ではない姿勢に耐えるためのUAVの機体の設計の必要性を未然に防ぐ。
【0009】
本発明は、少なくとも1つの航空力学的揚力表面および推進力発生動力装置を備える空気より重い空中飛行体と、空気より重い飛行体を持ち上げるようになされた空気より軽い飛行体と、空気より軽い飛行体から空気より重い飛行体を吊るすために前記揚力表面の先端で、またはその先端に向かって空気より重い飛行体に取り付け可能な繋ぎ綱と、制御手段との組合せであり、すべてが前述の方法を実施できるように構成され配置されている組合せにも在する。
【0010】
本発明は、前記飛行体が少なくとも1つの航空力学的揚力表面および推進力発生動力装置を備え、前記揚力表面の構造はその先端に、またはその先端に向かって上記で述べた飛行体を打ち上げるための繋ぎ綱を取り付けるための手段を組み込んだ、上記で定義される方法によって打ち上げられるようになされた、太陽エネルギーを動力とする、無人の空気より重い空中飛行体にも在する。
【0011】
本発明のこれらのおよび他の態様は次いで、例示として、添付の図面を参照してより詳細に説明する。
【発明を実施するための最良の形態】
【0012】
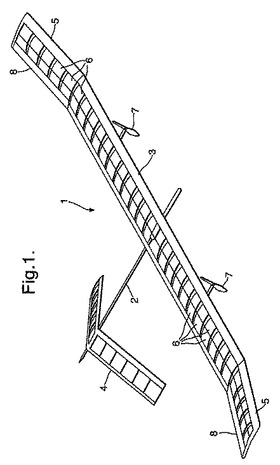
図1を参照すると、図示のUAV1は、主翼3および(別の実施形態では、より従来型の尾翼を使用することができるが)逆V字型の尾部4を有する筒状の胴体2を備える。主翼3は、上反角のついた先端部分5を有し、実質的にその上表面全体が光電池6のアレイを持っている、またはそのような電池は、透明な上面膜の下で主翼構造体内に格納することもできる。その動力装置は、を1対の翼に装着されたブラシレスDC電気モータ(図示せず)で駆動されるプロペラ7を備えるが、別の実施形態では、機体の寸法およびモータの定格に応じて異なる数のそのような動力装置を備えることができる。主翼構造体の内部に、複数の再生可能な燃料電池または再充電可能なバッテリーが格納される。
【0013】
UAVの使用では、所望の成層圏高度に打ち上げられると、日光のある時間中は、動力が光電池アレイ6によってそのモータに供給され、搭載された燃料電池またはバッテリーを充電し、暗い時間中は、燃料電池/バッテリーによって蓄えられた電力がモータに供給される。このように、飛行体は、知られている原理に従って「永久の」飛行を行うことができる。
【0014】
胴体2および翼および尾部の桁およびリブは炭素複合材料、先端はRohacell(登録商標)などの高性能剛体発泡材料、翼および尾部の表面はMaylar(登録商標)膜によって構成され、機体重量は最小限にされる。横揺れ制御は、補助翼8によって行われ、尾部4はピッチおよびヨー制御が可能なようにすべて動く、すなわち、尾部4の各面はそれぞれの桁によって回転可能に胴体2に装着され、それらは昇降舵(ピッチ制御)として機能するように一斉に、方向舵(ヨー制御)として機能するように差動的に回転させることができる。
【0015】
以下で説明する飛行体の飛行制御、動力装置、搭載機器および繋ぎ綱の解放の制御は、地上からの無線中継を介して、または遠く離れた地上基地との人工衛星を介して、および/または搭載コンピュータによって行うことが可能である。その搭載物は、胴体/翼の根元の連結部区域で搬送する、または翼3全体に多数のモジュールで分布させることができ、導入部でその例を述べた動作任務に適切である通信、監視または他の装置などを備えることができる。
【0016】
次いで、図2から図5に移ると、これらは飛行体の打ち上げ手順の連続する段階を示す。
【0017】
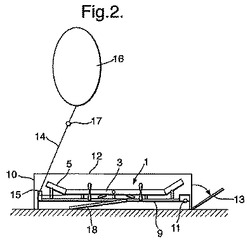
図2を参照すると、UAV1は、コンテナ10内の翼幅方向の梁9上に水平に固定されて打ち上げ場所に輸送される。梁9は、11で示すように一端でコンテナ10に対し枢動する。打ち上げ場所でコンテナの頂部12が取り除かれ、枢動部11に隣接する端部13が開かれる。ヘリウム気球外皮からの繋ぎ綱14が、最初に枢動部11と反対側の梁9の端部15に取り付けられ、それからUAVの主翼3の桁に、その中央部分の最も外側の端部に隣接して、先端部分5の前に取り付けられる。気球が膨らまされ、図の16に示すように上昇する。この気球は一般に、例えば、気象観測または科学的な気球打ち上げに使用されるような従来型とすることができ、搭載物(この場合はUAV1)とともに20000〜30000mの領域の設計浮揚高度を有する。気球は、無線接続および/または搭載のコンピュータによってその解放を制御することができる排気バルブおよび多数のバラスト(図示せず)を備える。塊部17が、後で説明する理由のために繋ぎ綱14に含まれる。図を分かりやすくするため、気球16はUAV1に対する実際の相対的な寸法からずっと縮小した縮尺で示されており、繋ぎ綱14も同様にずっと短く示されていることに注目されたい。実際には、繋ぎ綱14は200〜400mの長さの範囲とすることができる。同様に、気球16への風の影響下での繋ぎ綱14の変位角度は、実際に得られる可能性が高い角度より図2および3で誇張されている。
【0018】
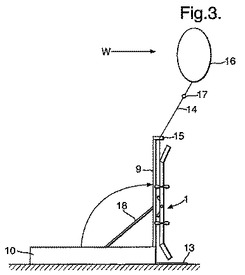
梁の下のジャッキ18により補助され、梁9上の気球16の上昇が梁を図3に示す垂直状態に到達するまでその枢動軸周りに回転させる。この状態で、梁からUAV1への固定が解放され、UAVは、90°傾いた姿勢で、事実上、梁の端部15から繋ぎ綱14に吊るされる。次いで、繋ぎ綱14が梁9から解放され、気球16がUAVを上方に、梁から離れて上昇させる。コンテナ10は、梁の端部を最初に風向き(風の方向は図3に矢印Wによって示されている)に合わせているので、打ち上げ手順のこの部分の間にUAVが梁と衝突する危険はまったくない。
【0019】
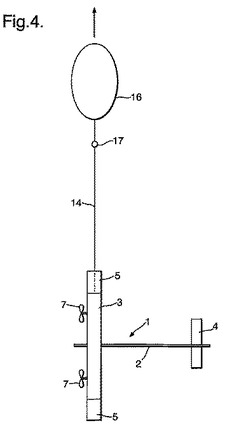
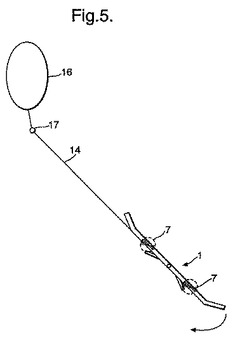
図4に示すように、気球16はその下に、梁9から解放された姿勢と同じ姿勢でUAV1を繋ぎ綱14に吊るして搬送し、所望の成層圏高度まで上昇する。上昇の最上点で、UAVのモータに動力が入れられ、その尾部4が「下降昇降舵(down elevator)」位置に配置される。この組合せの効果は、UAVが、その翼3の上表面を外側に向けて繋ぎ綱14の塊部17に対する接続点の周りの弧状の経路(円錐振り子運動)を描き始めることである。安定した動作が達成されると、昇降舵が中立にセットされ、動力が増加される。UAVの速度が増加するに従って、経路の半径が増大し、UAVが発生させる揚力が増大し、その結果、繋ぎ綱でつながれたUAVは、その傾いた姿勢を相応して減少させながら、気球に対して相対的に上向きの螺旋状経路を描く。図5は、UAVが水平に対してほぼ45°に達したときの、UAV1の気球16に対する上向き飛行中の2つの飛行体の配置を示す。このプロセスは、UAVが繋ぎ綱14から解放され、自由飛行を取ることが許される、水平姿勢、またはその近くに到達するまで続く。
【0020】
繋ぎ綱14内の塊部17の目的は、UAV1が、図4の状態から繋ぎ綱から解放され得る状態になる水平またはほとんど水平な姿勢への移行過程で、その周りを飛行することができる比較的安定した固定位置を画成することである。それにもかかわらず、その繋ぎ綱で気球周りを飛行するUAVは、UAVの経路と比較してずっと小さな径ではあるものの、UAVに数度遅れて気球を弧状経路の周りを引っ張る傾向にあることを理解されたい。UAV自体のこの引っ張る傾向は、繋ぎ綱14のUAVへの取り付け位置を飛行体の重心の少し後ろに配置することによって、かつ/または反対方向の「方向舵」(差動尾翼)の制御によって補正することができるが、この傾向はその弧の中心に向かって内向きにUAVの向きを変えさせる。UAVが気球周りの飛行でその増大する揚力量を進展させ、それ自体の重量のうちの支える割合が増加すると、この効果は気球に吊るされた重量を軽減し、したがって、この傾向は気球を上昇させることになることも理解されたい。そのままにしておくと、解放され得る状態になる水平またはほとんど水平な姿勢にUAVが到達することが妨げられる可能性があるので、この傾向を気球からの制御されたガスの排出によって修正することができる。
【0021】
UAVが繋ぎ綱から解放されるための対気速度および高度の必須条件に到達することを確実にするために、打ち上げ手順のこの局面を通してUAVの姿勢が監視され、要求に応じてその動力、飛行制御および気球の浮力が制御される。この目的のために、UAV1および気球16の両方は、地上との遠隔計測連結を有するGPS受信機を備え、UAVの姿勢が2つの飛行体の相対的高度から求めることができ、かつ/または、気球はUAVを観察することができるビデオカメラを携行することができる。
【0022】
繋ぎ綱14の主要な長さは、Kevlar(登録商標)またはSpectra(登録商標)などの任意の適切な材料から作ることができるが、要求されるときそれを解放させるために、周りに加熱要素が巻かれた少なくとも1つのポリエチレンまたは他の可融性のロープ(例えば、Spectra(登録商標))の連結部をUAVの取り付け部に組み込むことができる。解放のための信号が与えられると、この加熱要素に電圧が加えられ連結部を溶融する。
【0023】
UAVが解放された後、気球16は完全に排気され、回収のために搭載するパラシュートによって安全に地上に戻される。最終的にUAVを回収すべき場合は、それは「脱熱化(dethermalise)」され(翼3が完全に止められ)、尾翼の差動動作によって行われる方向制御によって地上に飛行させることができる。これによって下降中の飛行負荷が減少し、従来の滑空飛行より低い対気速度でのより迅速な制御された下降が可能になり、回収パラシュートを携行することによるUAVの重量の不利益を回避できる。
【0024】
前述の説明から、UAV1をその機能を果す成層圏高度に打ち上げる手順は、それ自身の動力で大気圏を通り飛行して上がることを要せず、大気圏を通る経路内は気球16によって支えられる。一方、気球がそれを高度に搬送した後の自由飛行への移行は、いかなる気球からの自由落下もなしに、漸進的な、かつ制御された方法でそれ自体の動力によって達成される。それによって、機体を大気圏飛行によって、または自由落下からの回復によって加えられる航空力学的負荷に応じるように設計された機体より軽くすることができ、搬送できる最大積載重量がそれに相当して増加することになる。
【0025】
UAVが図4に示す姿勢で気球によって吊るされて上昇させられるのが通常の場合であるが、それが別の姿勢で上昇させられ、その動力付加段階の開始のために図4の姿勢に移行されることは、本発明の範囲内である。またUAVがその自由飛行の移行に必要とされるより短い繋ぎ綱で上昇させられ、その動力付加段階の開始のために要求に応じて繋ぎ綱が繰り出されるのも本発明の範囲内である。
【図面の簡単な説明】
【0026】
【図1】本発明による方法によって打ち上げられることができる、高高度の、長航続時間の、太陽エネルギーを動力とするUAVの一実施形態の絵で表した図である。
【図2】図1のUAVの高高度への打ち上げの連続する段階を示す、ノンスケールの、概略図の1つである。
【図3】図1のUAVの高高度への打ち上げの連続する段階を示す、ノンスケールの、概略図の1つである。
【図4】図1のUAVの高高度への打ち上げの連続する段階を示す、ノンスケールの、概略図の1つである。
【図5】図1のUAVの高高度への打ち上げの連続する段階を示す、ノンスケールの、概略図の1つである。
【技術分野】
【0001】
本発明は空中飛行体の打ち上げに関し、より詳細には(限定はしないが)、高高度の、長航続時間の、太陽エネルギーを動力とする、翼のある、無人空中飛行体(UAVs)の打ち上げに関する。
【背景技術】
【0002】
太陽エネルギーを動力とするUAVsは、通信中継、地球監視、気象観測、偵察および地図作成などの役割のために、成層圏高度(通常は15000と30000mの間)で飛行する長航続時間の航空プラットフォームとして使用するために提案されてきた。この点でそれらは、従来これらの目的のために使用されている地球の周囲を軌道を描いて回転する人工衛星に対しコスト効率の高い代替品を提供する可能性があり、それらを地球の選択された地域が見えるところに留まらせる、または任意の別の選択された場所に飛行させるように容易に制御できるという追加の利点を有する。そのような飛行体は、少なくとも1つの航空力学的な揚力表面(翼)、1つ又は複数の電気的に駆動される推進力発生モータ、光電池のアレイ、および再充電可能なバッテリーまたは再生式の燃料電池などの電気貯蔵手段を含む軽量な構造を備える。そのような飛行体の一例は、米国特許第5810284号明細書、国際公開第01/58756号パンフレット、国際公開第01/58757号パンフレット、国際公開第01/58758号パンフレットに開示されている。原理的にこの種の飛行体は、日光のある時間中は光電池によって発生する電力が高出力でモータを駆動し、飛行体をベース動作高度からより高い動作高度に上昇させ、かつ、電気貯蔵手段に充電し、暗い時間中はモータが貯蔵手段からのより低い動力で駆動され、飛行体は(依然として成層圏であるが)ベース動作高度に降下する毎日の飛行パターンに従って、無期限に空中に留まることができ、それらの機械的構成部品の信頼性および機体完全性によってのみ制限される。
【0003】
成層圏内の大気状態は一般に温和であり、これは、成層圏内でのみ飛行するように設計される機体は、大気圏の変化する大気状態内で飛行するように設計される機体よりも頑丈でなくすることができ、したがって、より軽くすることができる。さらに、機体重量の最小化は、動力供給が搭載された光電池によって日光のある間に発生させることができる電気に制限される長航続時間飛行体の成功のために特に重要である。
【0004】
米国特許第5810284号明細書他に開示されるなどの、高高度の、太陽エネルギーを動力とするUAVが最初にその動作高度に打ち上げられる従来の方法は、それを地上からそれ自体の動力の下で上がらせるものである。しかしながらこれは、大気圏の乱流領域を通過する飛行によって加えられる追加の負荷に対処するために、機体が十分強く(したがって、重く)なければならない(したがって、それが運搬することができる最大積載重量に望ましくない制限を課す)こと、かつ/または上昇中に機体損傷のリスクがあること、かつ/またはその打ち上げが最も良好な気象条件を待たなければならないことを意味する。
【0005】
米国特許第4697761号明細書は、空気より軽い気球の外皮内に90°傾いた姿勢で吊るされて空中に搬送される、太陽エネルギーを動力とするUAVの打ち上げの代替方法を開示する。所望の高度に到達すると、気球の下端部が繰り広げられ、少し遅れた後UAVが解放され、それ自体の動力で水平飛行を担う以前は気球から自由落下する。自由落下する90°傾いた姿勢から水平飛行に移るために必要な航空力学的制御についての詳細は何も提供されていない。しかしながら、気球からの落下から回復する機体にかなりの力が加えられる可能性が高く、この場合も通常の成層圏飛行に要求される機体より強く(したがって、重く)しなければならないことを意味する。
【発明の開示】
【発明が解決しようとする課題】
【0006】
上記で述べた従来技術の打ち上げ方法の欠点を防止することが、本発明の1つの目的である。
【課題を解決するための手段】
【0007】
したがって、一態様では、本発明は、少なくとも1つの航空力学的揚力表面および推進力発生動力装置を備える、空気より重い空中飛行体を打ち上げる方法にあり、この方法は、空気より重い空中飛行体を空気より軽い飛行体によって所望の高度に上昇させる段階と、前記所望の高度に達したとき、空気より軽い飛行体から前記揚力表面の先端またはその先端に向かって空気より重い飛行体に取り付けられた繋ぎ綱によって吊るされた空気より重い飛行体に推進力を発生させるために動力装置を動作させ、それによって繋ぎ綱で繋がれた空気より重い飛行体に空気より軽い飛行体に対し相対的な上向きの螺旋状の経路を描かせる段階と、空気より重い飛行体が所望の姿勢に到達したとき、空気より重い飛行体の自由飛行を許すために、前記繋ぎ綱を開放する段階とを備える。
【0008】
本発明による方法は、長航続時間の、太陽エネルギーを動力とするUAVの成層圏高度への打ち上げに特に適用可能であり、大気圏を通りそれ自体の動力で飛行するための、または空気より軽い飛行体から解放された自由落下の通常ではない姿勢に耐えるためのUAVの機体の設計の必要性を未然に防ぐ。
【0009】
本発明は、少なくとも1つの航空力学的揚力表面および推進力発生動力装置を備える空気より重い空中飛行体と、空気より重い飛行体を持ち上げるようになされた空気より軽い飛行体と、空気より軽い飛行体から空気より重い飛行体を吊るすために前記揚力表面の先端で、またはその先端に向かって空気より重い飛行体に取り付け可能な繋ぎ綱と、制御手段との組合せであり、すべてが前述の方法を実施できるように構成され配置されている組合せにも在する。
【0010】
本発明は、前記飛行体が少なくとも1つの航空力学的揚力表面および推進力発生動力装置を備え、前記揚力表面の構造はその先端に、またはその先端に向かって上記で述べた飛行体を打ち上げるための繋ぎ綱を取り付けるための手段を組み込んだ、上記で定義される方法によって打ち上げられるようになされた、太陽エネルギーを動力とする、無人の空気より重い空中飛行体にも在する。
【0011】
本発明のこれらのおよび他の態様は次いで、例示として、添付の図面を参照してより詳細に説明する。
【発明を実施するための最良の形態】
【0012】
図1を参照すると、図示のUAV1は、主翼3および(別の実施形態では、より従来型の尾翼を使用することができるが)逆V字型の尾部4を有する筒状の胴体2を備える。主翼3は、上反角のついた先端部分5を有し、実質的にその上表面全体が光電池6のアレイを持っている、またはそのような電池は、透明な上面膜の下で主翼構造体内に格納することもできる。その動力装置は、を1対の翼に装着されたブラシレスDC電気モータ(図示せず)で駆動されるプロペラ7を備えるが、別の実施形態では、機体の寸法およびモータの定格に応じて異なる数のそのような動力装置を備えることができる。主翼構造体の内部に、複数の再生可能な燃料電池または再充電可能なバッテリーが格納される。
【0013】
UAVの使用では、所望の成層圏高度に打ち上げられると、日光のある時間中は、動力が光電池アレイ6によってそのモータに供給され、搭載された燃料電池またはバッテリーを充電し、暗い時間中は、燃料電池/バッテリーによって蓄えられた電力がモータに供給される。このように、飛行体は、知られている原理に従って「永久の」飛行を行うことができる。
【0014】
胴体2および翼および尾部の桁およびリブは炭素複合材料、先端はRohacell(登録商標)などの高性能剛体発泡材料、翼および尾部の表面はMaylar(登録商標)膜によって構成され、機体重量は最小限にされる。横揺れ制御は、補助翼8によって行われ、尾部4はピッチおよびヨー制御が可能なようにすべて動く、すなわち、尾部4の各面はそれぞれの桁によって回転可能に胴体2に装着され、それらは昇降舵(ピッチ制御)として機能するように一斉に、方向舵(ヨー制御)として機能するように差動的に回転させることができる。
【0015】
以下で説明する飛行体の飛行制御、動力装置、搭載機器および繋ぎ綱の解放の制御は、地上からの無線中継を介して、または遠く離れた地上基地との人工衛星を介して、および/または搭載コンピュータによって行うことが可能である。その搭載物は、胴体/翼の根元の連結部区域で搬送する、または翼3全体に多数のモジュールで分布させることができ、導入部でその例を述べた動作任務に適切である通信、監視または他の装置などを備えることができる。
【0016】
次いで、図2から図5に移ると、これらは飛行体の打ち上げ手順の連続する段階を示す。
【0017】
図2を参照すると、UAV1は、コンテナ10内の翼幅方向の梁9上に水平に固定されて打ち上げ場所に輸送される。梁9は、11で示すように一端でコンテナ10に対し枢動する。打ち上げ場所でコンテナの頂部12が取り除かれ、枢動部11に隣接する端部13が開かれる。ヘリウム気球外皮からの繋ぎ綱14が、最初に枢動部11と反対側の梁9の端部15に取り付けられ、それからUAVの主翼3の桁に、その中央部分の最も外側の端部に隣接して、先端部分5の前に取り付けられる。気球が膨らまされ、図の16に示すように上昇する。この気球は一般に、例えば、気象観測または科学的な気球打ち上げに使用されるような従来型とすることができ、搭載物(この場合はUAV1)とともに20000〜30000mの領域の設計浮揚高度を有する。気球は、無線接続および/または搭載のコンピュータによってその解放を制御することができる排気バルブおよび多数のバラスト(図示せず)を備える。塊部17が、後で説明する理由のために繋ぎ綱14に含まれる。図を分かりやすくするため、気球16はUAV1に対する実際の相対的な寸法からずっと縮小した縮尺で示されており、繋ぎ綱14も同様にずっと短く示されていることに注目されたい。実際には、繋ぎ綱14は200〜400mの長さの範囲とすることができる。同様に、気球16への風の影響下での繋ぎ綱14の変位角度は、実際に得られる可能性が高い角度より図2および3で誇張されている。
【0018】
梁の下のジャッキ18により補助され、梁9上の気球16の上昇が梁を図3に示す垂直状態に到達するまでその枢動軸周りに回転させる。この状態で、梁からUAV1への固定が解放され、UAVは、90°傾いた姿勢で、事実上、梁の端部15から繋ぎ綱14に吊るされる。次いで、繋ぎ綱14が梁9から解放され、気球16がUAVを上方に、梁から離れて上昇させる。コンテナ10は、梁の端部を最初に風向き(風の方向は図3に矢印Wによって示されている)に合わせているので、打ち上げ手順のこの部分の間にUAVが梁と衝突する危険はまったくない。
【0019】
図4に示すように、気球16はその下に、梁9から解放された姿勢と同じ姿勢でUAV1を繋ぎ綱14に吊るして搬送し、所望の成層圏高度まで上昇する。上昇の最上点で、UAVのモータに動力が入れられ、その尾部4が「下降昇降舵(down elevator)」位置に配置される。この組合せの効果は、UAVが、その翼3の上表面を外側に向けて繋ぎ綱14の塊部17に対する接続点の周りの弧状の経路(円錐振り子運動)を描き始めることである。安定した動作が達成されると、昇降舵が中立にセットされ、動力が増加される。UAVの速度が増加するに従って、経路の半径が増大し、UAVが発生させる揚力が増大し、その結果、繋ぎ綱でつながれたUAVは、その傾いた姿勢を相応して減少させながら、気球に対して相対的に上向きの螺旋状経路を描く。図5は、UAVが水平に対してほぼ45°に達したときの、UAV1の気球16に対する上向き飛行中の2つの飛行体の配置を示す。このプロセスは、UAVが繋ぎ綱14から解放され、自由飛行を取ることが許される、水平姿勢、またはその近くに到達するまで続く。
【0020】
繋ぎ綱14内の塊部17の目的は、UAV1が、図4の状態から繋ぎ綱から解放され得る状態になる水平またはほとんど水平な姿勢への移行過程で、その周りを飛行することができる比較的安定した固定位置を画成することである。それにもかかわらず、その繋ぎ綱で気球周りを飛行するUAVは、UAVの経路と比較してずっと小さな径ではあるものの、UAVに数度遅れて気球を弧状経路の周りを引っ張る傾向にあることを理解されたい。UAV自体のこの引っ張る傾向は、繋ぎ綱14のUAVへの取り付け位置を飛行体の重心の少し後ろに配置することによって、かつ/または反対方向の「方向舵」(差動尾翼)の制御によって補正することができるが、この傾向はその弧の中心に向かって内向きにUAVの向きを変えさせる。UAVが気球周りの飛行でその増大する揚力量を進展させ、それ自体の重量のうちの支える割合が増加すると、この効果は気球に吊るされた重量を軽減し、したがって、この傾向は気球を上昇させることになることも理解されたい。そのままにしておくと、解放され得る状態になる水平またはほとんど水平な姿勢にUAVが到達することが妨げられる可能性があるので、この傾向を気球からの制御されたガスの排出によって修正することができる。
【0021】
UAVが繋ぎ綱から解放されるための対気速度および高度の必須条件に到達することを確実にするために、打ち上げ手順のこの局面を通してUAVの姿勢が監視され、要求に応じてその動力、飛行制御および気球の浮力が制御される。この目的のために、UAV1および気球16の両方は、地上との遠隔計測連結を有するGPS受信機を備え、UAVの姿勢が2つの飛行体の相対的高度から求めることができ、かつ/または、気球はUAVを観察することができるビデオカメラを携行することができる。
【0022】
繋ぎ綱14の主要な長さは、Kevlar(登録商標)またはSpectra(登録商標)などの任意の適切な材料から作ることができるが、要求されるときそれを解放させるために、周りに加熱要素が巻かれた少なくとも1つのポリエチレンまたは他の可融性のロープ(例えば、Spectra(登録商標))の連結部をUAVの取り付け部に組み込むことができる。解放のための信号が与えられると、この加熱要素に電圧が加えられ連結部を溶融する。
【0023】
UAVが解放された後、気球16は完全に排気され、回収のために搭載するパラシュートによって安全に地上に戻される。最終的にUAVを回収すべき場合は、それは「脱熱化(dethermalise)」され(翼3が完全に止められ)、尾翼の差動動作によって行われる方向制御によって地上に飛行させることができる。これによって下降中の飛行負荷が減少し、従来の滑空飛行より低い対気速度でのより迅速な制御された下降が可能になり、回収パラシュートを携行することによるUAVの重量の不利益を回避できる。
【0024】
前述の説明から、UAV1をその機能を果す成層圏高度に打ち上げる手順は、それ自身の動力で大気圏を通り飛行して上がることを要せず、大気圏を通る経路内は気球16によって支えられる。一方、気球がそれを高度に搬送した後の自由飛行への移行は、いかなる気球からの自由落下もなしに、漸進的な、かつ制御された方法でそれ自体の動力によって達成される。それによって、機体を大気圏飛行によって、または自由落下からの回復によって加えられる航空力学的負荷に応じるように設計された機体より軽くすることができ、搬送できる最大積載重量がそれに相当して増加することになる。
【0025】
UAVが図4に示す姿勢で気球によって吊るされて上昇させられるのが通常の場合であるが、それが別の姿勢で上昇させられ、その動力付加段階の開始のために図4の姿勢に移行されることは、本発明の範囲内である。またUAVがその自由飛行の移行に必要とされるより短い繋ぎ綱で上昇させられ、その動力付加段階の開始のために要求に応じて繋ぎ綱が繰り出されるのも本発明の範囲内である。
【図面の簡単な説明】
【0026】
【図1】本発明による方法によって打ち上げられることができる、高高度の、長航続時間の、太陽エネルギーを動力とするUAVの一実施形態の絵で表した図である。
【図2】図1のUAVの高高度への打ち上げの連続する段階を示す、ノンスケールの、概略図の1つである。
【図3】図1のUAVの高高度への打ち上げの連続する段階を示す、ノンスケールの、概略図の1つである。
【図4】図1のUAVの高高度への打ち上げの連続する段階を示す、ノンスケールの、概略図の1つである。
【図5】図1のUAVの高高度への打ち上げの連続する段階を示す、ノンスケールの、概略図の1つである。
【特許請求の範囲】
【請求項1】
空気より重い空中飛行体を空気より軽い飛行体によって所望の高度に上昇させる段階と、前記所望の高度に達したとき、空気より軽い飛行体から揚力表面の先端またはその先端に向かって空気より重い飛行体に取り付けられた繋ぎ綱によって吊るされた空気より重い飛行体に推進力を発生させるために動力装置を動作させ、それによって繋ぎ綱で繋がれた空気より重い飛行体に空気より軽い飛行体に対し相対的な上向きの螺旋状の経路を描かせる段階と、空気より重い飛行体が所望の姿勢に到達したとき、空気より重い飛行体の自由飛行を許すために、前記繋ぎ綱を開放する段階とを備える、少なくとも1つの航空力学的揚力表面および推進力発生動力装置を備える、空気より重い空中飛行体を打ち上げる方法。
【請求項2】
空気より重い飛行体が、空気より軽い飛行体に前述のように吊るされて上昇させられる請求項1に記載の方法。
【請求項3】
空気より重い飛行体が最初に実質的に水平な姿勢で枢動可能な構造体によって支えられ、前記構造体が空気より重い飛行体を実質的に90°傾いた姿勢に配置するように枢動され、空気より重い飛行体が、前述のように上昇させられるために空気より軽い飛行体に繋ぎ綱で繋がれながら前記構造体から解放される請求項1または2に記載の方法。
【請求項4】
空気より軽い飛行体が、前述のように構造体を枢動させる、または枢動させることを補助するように、前記構造体に取り付けられる請求項3に記載の方法。
【請求項5】
空気より重い飛行体が、前記動力装置の前記動作の始動時に下降(pitch down)状態にさせられる、ピッチ制御手段を有する請求項1から4のいずれかに記載の方法。
【請求項6】
空気より重い飛行体が、前記上向きの螺旋状経路を描く過程中、飛行体の前記繋ぎ綱への取り付けと反対方向に飛行体の向きを変えさせるような傾向の状態にさせる、ヨー制御手段を有する請求項1から5のいずれかに記載の方法。
【請求項7】
前記繋ぎ綱の空気より重い飛行体への取り付け位置が、そのような飛行体の重心の後部にある請求項1から6のいずれかに記載の方法。
【請求項8】
空気より重い飛行体が前記上向きの螺旋状経路を描く過程中、空気より軽い飛行体からガスを排気させるようにする請求項1から7のいずれかに記載の方法。
【請求項9】
前記繋ぎ綱内に、その周りを空気より重い飛行体が前記上向きの螺旋状経路を描く位置を画成するために、塊部を組み込む請求項1から8のいずれかに記載の方法。
【請求項10】
前記繋ぎ綱が、空気より重い飛行体への取り付け部に隣接して、ある長さの可融性の材料を含み、空気より重い飛行体が繋ぎ綱を解放するために可融性材料を溶融する加熱手段を含む請求項1から9のいずれかに記載の方法。
【請求項11】
前記所望の高度が成層圏内である請求項1から10のいずれかに記載の方法。
【請求項12】
前記所望の姿勢が水平、またはほとんど水平である請求項1から11のいずれかに記載の方法。
【請求項13】
前記空気より重い飛行体が太陽エネルギーを動力とする、無人飛行体である請求項1から12のいずれかに記載の方法。
【請求項14】
少なくとも1つの航空力学的揚力表面および推進力発生動力装置を備える空気より重い飛行体と、空気より重い飛行体を持ち上げるようになされた空気より軽い飛行体と、空気より軽い飛行体から空気より重い飛行体を吊るすために、前記揚力表面の先端で、またはその先端に向かって空気より重い飛行体に取り付け可能な繋ぎ綱と、制御手段との組合せであり、請求項1から13のいずれかに記載の方法を実施できるようにすべてが構成され、配置されている組合せ。
【請求項15】
空気より重い飛行体を地上で実質的に水平な姿勢で支えるようになされ、飛行体をその打ち上げ開始時に実質的に90°傾いた姿勢に配置するように枢動可能な構造も具える請求項14に記載の組合せ。
【請求項16】
前記飛行体が少なくとも1つの航空力学的揚力表面および推進力発生動力装置を具え、前記揚力表面の構造はその先端に、またはその先端に向かって上記で述べた飛行体を打ち上げるための繋ぎ綱を取り付けるための手段を組み込んだ、請求項1から13のいずれか一項に記載の方法によって打ち上げられるようになされた、太陽エネルギーを動力とする、無人の空気より重い空中飛行体。
【請求項17】
前記繋ぎ綱を選択的に解放するための手段を組み込んだ請求項16に記載の飛行体。
【請求項18】
前記揚力表面が中央部分およびそれぞれの上反角のついた先端部分を備え、取り付けの前記手段が前記中央部分と前記先端部分の接続部に隣接して配設される請求項16または17に記載の飛行体。
【請求項19】
飛行体を実質的に水平な姿勢で支えるようになされ、その打ち上げ開始時に実質的に90°傾いた姿勢に飛行体を配置するように枢動可能である構造体との組合せである請求項16から18のいずれかに記載の飛行体。
【請求項1】
空気より重い空中飛行体を空気より軽い飛行体によって所望の高度に上昇させる段階と、前記所望の高度に達したとき、空気より軽い飛行体から揚力表面の先端またはその先端に向かって空気より重い飛行体に取り付けられた繋ぎ綱によって吊るされた空気より重い飛行体に推進力を発生させるために動力装置を動作させ、それによって繋ぎ綱で繋がれた空気より重い飛行体に空気より軽い飛行体に対し相対的な上向きの螺旋状の経路を描かせる段階と、空気より重い飛行体が所望の姿勢に到達したとき、空気より重い飛行体の自由飛行を許すために、前記繋ぎ綱を開放する段階とを備える、少なくとも1つの航空力学的揚力表面および推進力発生動力装置を備える、空気より重い空中飛行体を打ち上げる方法。
【請求項2】
空気より重い飛行体が、空気より軽い飛行体に前述のように吊るされて上昇させられる請求項1に記載の方法。
【請求項3】
空気より重い飛行体が最初に実質的に水平な姿勢で枢動可能な構造体によって支えられ、前記構造体が空気より重い飛行体を実質的に90°傾いた姿勢に配置するように枢動され、空気より重い飛行体が、前述のように上昇させられるために空気より軽い飛行体に繋ぎ綱で繋がれながら前記構造体から解放される請求項1または2に記載の方法。
【請求項4】
空気より軽い飛行体が、前述のように構造体を枢動させる、または枢動させることを補助するように、前記構造体に取り付けられる請求項3に記載の方法。
【請求項5】
空気より重い飛行体が、前記動力装置の前記動作の始動時に下降(pitch down)状態にさせられる、ピッチ制御手段を有する請求項1から4のいずれかに記載の方法。
【請求項6】
空気より重い飛行体が、前記上向きの螺旋状経路を描く過程中、飛行体の前記繋ぎ綱への取り付けと反対方向に飛行体の向きを変えさせるような傾向の状態にさせる、ヨー制御手段を有する請求項1から5のいずれかに記載の方法。
【請求項7】
前記繋ぎ綱の空気より重い飛行体への取り付け位置が、そのような飛行体の重心の後部にある請求項1から6のいずれかに記載の方法。
【請求項8】
空気より重い飛行体が前記上向きの螺旋状経路を描く過程中、空気より軽い飛行体からガスを排気させるようにする請求項1から7のいずれかに記載の方法。
【請求項9】
前記繋ぎ綱内に、その周りを空気より重い飛行体が前記上向きの螺旋状経路を描く位置を画成するために、塊部を組み込む請求項1から8のいずれかに記載の方法。
【請求項10】
前記繋ぎ綱が、空気より重い飛行体への取り付け部に隣接して、ある長さの可融性の材料を含み、空気より重い飛行体が繋ぎ綱を解放するために可融性材料を溶融する加熱手段を含む請求項1から9のいずれかに記載の方法。
【請求項11】
前記所望の高度が成層圏内である請求項1から10のいずれかに記載の方法。
【請求項12】
前記所望の姿勢が水平、またはほとんど水平である請求項1から11のいずれかに記載の方法。
【請求項13】
前記空気より重い飛行体が太陽エネルギーを動力とする、無人飛行体である請求項1から12のいずれかに記載の方法。
【請求項14】
少なくとも1つの航空力学的揚力表面および推進力発生動力装置を備える空気より重い飛行体と、空気より重い飛行体を持ち上げるようになされた空気より軽い飛行体と、空気より軽い飛行体から空気より重い飛行体を吊るすために、前記揚力表面の先端で、またはその先端に向かって空気より重い飛行体に取り付け可能な繋ぎ綱と、制御手段との組合せであり、請求項1から13のいずれかに記載の方法を実施できるようにすべてが構成され、配置されている組合せ。
【請求項15】
空気より重い飛行体を地上で実質的に水平な姿勢で支えるようになされ、飛行体をその打ち上げ開始時に実質的に90°傾いた姿勢に配置するように枢動可能な構造も具える請求項14に記載の組合せ。
【請求項16】
前記飛行体が少なくとも1つの航空力学的揚力表面および推進力発生動力装置を具え、前記揚力表面の構造はその先端に、またはその先端に向かって上記で述べた飛行体を打ち上げるための繋ぎ綱を取り付けるための手段を組み込んだ、請求項1から13のいずれか一項に記載の方法によって打ち上げられるようになされた、太陽エネルギーを動力とする、無人の空気より重い空中飛行体。
【請求項17】
前記繋ぎ綱を選択的に解放するための手段を組み込んだ請求項16に記載の飛行体。
【請求項18】
前記揚力表面が中央部分およびそれぞれの上反角のついた先端部分を備え、取り付けの前記手段が前記中央部分と前記先端部分の接続部に隣接して配設される請求項16または17に記載の飛行体。
【請求項19】
飛行体を実質的に水平な姿勢で支えるようになされ、その打ち上げ開始時に実質的に90°傾いた姿勢に飛行体を配置するように枢動可能である構造体との組合せである請求項16から18のいずれかに記載の飛行体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2007−500654(P2007−500654A)
【公表日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願番号】特願2006−530528(P2006−530528)
【出願日】平成16年5月20日(2004.5.20)
【国際出願番号】PCT/GB2004/002209
【国際公開番号】WO2004/106156
【国際公開日】平成16年12月9日(2004.12.9)
【出願人】(501352882)キネテイツク・リミテツド (93)
【公表日】平成19年1月18日(2007.1.18)
【国際特許分類】
【出願日】平成16年5月20日(2004.5.20)
【国際出願番号】PCT/GB2004/002209
【国際公開番号】WO2004/106156
【国際公開日】平成16年12月9日(2004.12.9)
【出願人】(501352882)キネテイツク・リミテツド (93)
[ Back to top ]