
粒子線治療装置、及び粒子線治療装置制御方法
【課題】任意の方向から粒子線を照射可能な被検体から発生されるγ線を検出するPET検出器を備えた粒子線治療装置を提供する。
【解決手段】天板110を回転させる天板回転部106と、天板110を体軸方向を含む平面と平行もしくは直交方向に並進移動させる天板移動部108と、被検体に向けて粒子線を照射する粒子線照射部103と、粒子線照射部103を回転移動させる照射ノズル回転部104と、粒子線照射部103と被検体との間に、略筒型の形状で被検体を囲うように配置され、粒子線照射部103からの粒子線を通過させる開口を有し、被検体から発生するγ線を検出するPET検出部201と、粒子線の照射方向の軸に回転可能に保持する第1支持アーム203と、PET検出部201を体軸の周囲に回転可能に保持する第2支持アーム205と、PET検出部201で検出されたγ線を基に画像を生成する画像形成部202とを備える。
【解決手段】天板110を回転させる天板回転部106と、天板110を体軸方向を含む平面と平行もしくは直交方向に並進移動させる天板移動部108と、被検体に向けて粒子線を照射する粒子線照射部103と、粒子線照射部103を回転移動させる照射ノズル回転部104と、粒子線照射部103と被検体との間に、略筒型の形状で被検体を囲うように配置され、粒子線照射部103からの粒子線を通過させる開口を有し、被検体から発生するγ線を検出するPET検出部201と、粒子線の照射方向の軸に回転可能に保持する第1支持アーム203と、PET検出部201を体軸の周囲に回転可能に保持する第2支持アーム205と、PET検出部201で検出されたγ線を基に画像を生成する画像形成部202とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、加速させた粒子線を利用して例えば癌などの治療を行う粒子線治療装置及びその制御方法に関する。さらに詳しくは、粒子線が照射された患部から放射されるγ線を検知するPET(Positron Emission Tomography)装置を備えた粒子線治療装置及びその制御方法に関する。
【背景技術】
【0002】
近年、加速された荷電粒子線(以下、単に「粒子線」という)は停止直前に最大のエネルギーを放出する現象(このエネルギー・ピークは「ブラッグ・ピーク(Bragg Peak」と呼ばれる)が生じることを利用して、粒子線を患部に照射することで癌細胞を破壊する粒子線治療が行われ始めている。X線を含む放射線は体内を単調減衰しながら患部の前後を通過していくため、患部以外の正常組織にもダメージを与えてしまう。これに対し、加速された荷電粒子(例えば、陽子、炭素原子核など)が物質内を通過するとき、前述のようにブラッグ・ピークが生じるため、荷電粒子の停止位置を精密に制御することにより、被検体における患部までに通過する部分および患部の背後部分へのダメージを抑えることができる。
【0003】
この粒子線治療において被検体に対し粒子線を照射する装置が粒子線治療装置である。この粒子線治療装置において、照射された粒子線は、体内にある原子と衝突し陽電子放射核を生成する。この放射核から放出された陽電子は、その近傍に多数ある電子と結合してγ線を放射する。この現象は「自己放射化」と呼ばれている。そして、この放射されたγ線は、例えばシンチレータと光電子増倍管が組み合わされたシンチレーション検出器により検出することができる。この体内から放出されるγ線をシンチレーション検出器により検出する装置はPET(Positron Emission Tomografhy)装置と呼ばれる。近年、粒子線治療装置から照射された荷電粒子がどの深さまで到達したかを癌細胞の破壊と同時に観察するために上述の自己放射化の現象を利用する技術が提案されている。この様な理由から、最近、粒子線治療装置にPET装置を付加することが検討され始めている。
【0004】
粒子線治療装置では粒子線はノズルから照射されるが、この粒子線の侵入位置、及び照射方向は正常組織へのダメージなどを考慮して治療の見地から決められる。すなわち、「患部の位置」、「正常組織への照射回避」、及び「重要な臓器への影響の回避」を考慮してその照射方向が決められる。具体的には、正常組織への照射を抑えるため、粒子線が被検体の体表から患部に到達するまでの経路が極力最短経路となるようにしたり、重要な臓器に粒子線が当たらないように配慮したりするという条件の下で粒子線の照射方向が決定される。このため、粒子線治療装置には任意の照射方向から粒子線を照射できる性能が要求される。そこで、粒子線治療装置では、任意の照射方向を実現するために回転稼働する回転ガントリー及び回転機能を備えた寝台が使用される。磁場で偏向させやすい陽子を使用する「陽子線治療装置」には、粒子線を照射するノズルの向きが被検体が寝ている平面に直交する平面内で照射中心(アイソセンター)の周りに回転することで、照射角度を任意に設定することができる回転ガントリーが装備されていることが多い。この回転ガントリーでは、加速器で加速されて水平方向に飛来する荷電粒子ビームを任意の方向に曲げて最終的に振り下ろすといった偏向動作が行われる。最近では、炭素原子核を利用する重粒子線治療装置においても、超電導磁石を使用した回転ガントリーを装備することが検討されて始めている。さらに、寝台の基部は被検体が寝ている平面内をアイソセンターを中心に回転する円盤上に固定されており、寝台の天板はその基部に対して並進移動が可能なように作られている。これにより、被検体に対し任意の方向から粒子線を照射できるようになっている。
【0005】
従来の粒子線治療装置では、「直前に行った装置の校正・チェック」、「患者の位置決めとその補正」、及び「患者の固定」により、治療計画(照射計画)通りに照射されたとみなすことで、期待通りの照射が行われたと判断るものであった。そのため、作業途中で入ってくる照射ミスや照射誤差などが見過ごされる危険性があった。これらの問題を解決するため、PET装置を付加し、自己放射化を利用することで、照射された荷電粒子が停止した位置を直接画像として観察する技術(例えば、特許文献1参照。)が提案及び検討されている。
【0006】
【特許文献1】特開平9−189769号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
医師や放射線治療技師などの操作者(以下では、単に「操作者」という)は、患部の位置、PET装置、及び寝台の配置を考慮して、それぞれが総合に接触しないように照射ノズルの方向、寝台の位置、及び寝台の回転角度を設定する必要がある。従来は操作者の経験による目分量でそれらを粗調し、その後マーカー位置などで微調するという方法をとっていた。しかし、従来のPET装置を備えた粒子線治療装置では、PET装置がガントリーに対して固定されているため、患部位置やPET装置の配置などを優先して照射ノズルの回転角度と寝台の回転角度を調整しながら照射方向を決定する必要があり、最適な位置及び方向から粒子線を照射することが困難であるという場合が少なくなかった。
【0008】
PET装置は検出器が並べられた範囲しか検出領域を持たず、かつ寝台を患者の体軸方向に移動させながら全身の断層像を得る動作を前提としていたため。PET検出器は円筒状に配置されていることが多い。また、粒子線治療装置は、荷電粒子を照射ノズルから照射し患部に到達させるものなので、荷電粒子が侵入した体表面から患部までの正常組織に軽微であってもダメージを与えてしまう。そのため、患部及びダメージを受ける可能性がある部位をリアルタイムにできるだけ正確に観察・確認しながら照射したいという理由から、PET装置で観察する断層面は、粒子線の照射方向(すなわち、照射ノズルの方向)を表す軸を含む断層面であることが最も望ましい。またPET装置の視野は検出器の並べられた範囲の広さで決まり、その範囲が狭いとγ線の同時計測においてその信号を取り逃してしまう確率が増加してしまう。しかし、モニタリング用のPET装置が固定された粒子線治療装置では、粒子線の照射方向に自由度を持たせるため多数の検出器を略円筒状に並べることは困難であった。さらに、任意の位置から照射された粒子線の照射方向を示す軸を含む断層面にPETを配置することも困難であった。
【0009】
この発明は、このような事情に鑑みてなされたもので、任意の方向から粒子線を照射可能であって、かつ被検体から発生されるγ線を検出するPET検出器を備えた粒子線治療装置及びその制御方法を提供することを目的としている。
【課題を解決するための手段】
【0010】
上記目的を達成するために、請求項1に記載の粒子線治療装置は、被検体を載置する天板と、前記天板を載置平面内で回転させる天板回転手段と、前記天板を前記被検体の体軸方向に並進移動させる天板移動手段と、前記天板に載置された前記被検体に向けて粒子線を照射する粒子線照射手段と、前記粒子線照射手段を前記載置平面と直交する特定の平面内で被検体の周りを回転移動させる照射ノズル回転手段と、前記粒子線照射手段と前記被検体との間に、略筒型の形状で該筒内に前記被検体を囲うように配置され、かつ粒子線照射手段からの前記粒子線を通過させる開口を有し、前記粒子線が前記被検体に照射されたときに発生するγ線を検出するPET検出器と、前記PET検出器を前記粒子線の照射方向の軸の周りに回転可能に保持する第1支持アームと、前記第1支持アームを前記体軸の周囲に回転可能に(より詳しくは、前記照射ノズル回転手段の回転軸の周りに)保持する第2支持アームと、前記PET検出器で検出されたγ線を基に画像を生成する画像生成手段と、を備えたことを特徴とするものである。
【0011】
請求項7に記載の粒子線治療装置制御方法は、被検体を載置する天板と、前記天板を載置平面内で回転させる天板回転手段と、前記天板を前記被検体の体軸方向に並進移動させる天板移動手段と、前記天板に載置された前記被検体に向けて粒子線を照射する粒子線照射手段と、前記粒子線照射手段を前記載置平面と直交する特定の平面内で被検体の周りを回転移動させる照射ノズル回転手段と、前記粒子線照射手段と前記被検体との間に、略筒型の形状で該筒内に前記被検体を囲うように配置され、かつ粒子線照射手段からの前記粒子線を通過させる開口を有し、前記粒子線が前記被検体に照射されたときに発生するγ線を検出するPET検出器と、前記PET検出器を前記粒子線の照射方向の軸に回転可能に保持する第1支持アームと、前記第1支持アームを前記体軸の周りに(より詳しくは、前記照射ノズル回転手段の回転軸の周りに)回転可能に保持する第2支持アームと、前記PET検出器で検出されたγ線に基づいて画像を生成する画像生成手段と、を備えた粒子線治療装置を制御する粒子線治療装置制御方法であって、前記粒子線照射手段の回転の角度にかかわらず照射された粒子線が常に通過する点である照射中心を原点とする座標空間のベクトルで表される前記被検体への粒子線の照射方向の条件を入力として受ける段階と、前記ベクトルに基づいて、前記粒子線照射手段の回転角度θを算出し、前記粒子線照射手段を該角度θ回転させる段階と、前記ベクトルに基づいて、前記天板の回転角度ψを算出し、前記天板を該角度ψ回転させる段階と、前記角度θ及び前記角度ψに基づいて、前記粒子線の照射方向が前記被検体の照射対象部位を通過するよう前記天板を前記体軸方向に並進移動させる段階と、前記第2支持アームにより前記PET検出器を保持する前記第1支持アームを前記θとほぼ同じ角度で回転させる段階と、前記第1支持アームによる前記PET検出器の回転角度φを算出し、前記第1支持アームにより前記PET検出器を該角度φ回転させる段階と、を有することを特徴とするものである。
【発明の効果】
【0012】
請求項1に記載の粒子線治療装置及び請求項7に記載の粒子線治療装置制御方法は、被検体と粒子線照射手段との間に一部に開口を有する略筒型のPET検出器を配置し、それを支持するアーム部分に2つの回転自由度を備えた構成である。また、粒子線の被検体への照射により発生するγ線をPET検出器で検出することで被検体における粒子線によって破壊された部位を確認することができる構成となっている。これにより、機械的干渉(すなわち、機械同士の衝突)を発生させずに任意の方向から被検体に向けて粒子線を照射できるとともに、PET検出器の視野を最大限に確保することが可能となる。したがって、効果的かつ安全な方向から被検体に向けて粒子線が照射できるとともに、患部に向けて的確な粒子線の照射をおこなうことが可能となる。
【発明を実施するための最良の形態】
【0013】
〔第1の実施形態〕
以下、この発明の第1の実施形態に係る粒子治療装置について図1〜図3を参照して説明する。図1は本発明に係る粒子線治療装置における機能を表すブロック図である。図2(A)は本発明に係る粒子線治療装置を回転ガントリーの回転軸方向から見込んだ模式的な正面図である。図2(B)は本発明に係る粒子線治療装置の模式的な側面図である。図3は本発明に係る粒子線治療装置の模式的な上面図である。
【0014】
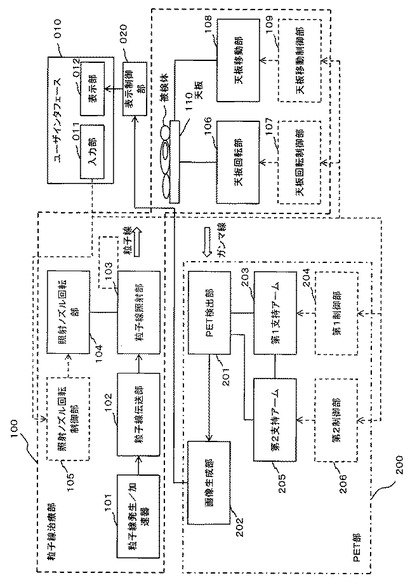
図1に示すように、本実施形態に係る粒子線治療装置は、粒子線治療部100、PET部200、表示制御部020、及び入力部011と表示部012を有するユーザインタフェース010を備えている。この粒子線治療装置は、本来は粒子線治療部100から照射される粒子線を被検体の患部に照射し、患部の細胞を破壊することで治療を行う装置である(以下では、粒子線を照射する対象とする患部を「照射対象部位」という)。ただし、粒子線が被検体のどの部分にあたっているかを把握するために補助的にPET部200を有している。すなわち、PET部200を用いて把握される粒子線の照射位置に基づいて、正確に照射対象部位に向けて粒子線の照射を行い効果的な治療を行うことができる。そのため、本実施形態に係る収支線治療装置では、まず粒子線の照射方向を最適な位置に設定するように粒子線照射部103及び天板110を移動させることに主とし、その粒子線の照射を妨げないように、すなわち、粒子線の照射野を妨げないこと、及び接触などの機械的な干渉を起こさないことを目的としてPET検出部201を移動させることになる。ただし、実際には、粒子線照射部103、天板110、及びPET検出部201の移動は連動して行われる。以下では、まず粒子線治療部100について説明し、その後PET部200について説明する。
【0015】
粒子線治療部100は、粒子線発生/加速器101、粒子線伝送部102、粒子線照射部103(照射ノズル)、照射ノズル回転部104(回転ガントリー)、及び照射ノズル回転制御部105から構成されている。
【0016】
粒子線発生/加速器101は、イオン源と、直線加速器、サイクロトロン、シンクロトロンなどの加速器(いずれも図示しない)で構成されている。粒子線発生/加速器101は、イオン源で陽イオン(例えば、水素イオン、ヘリウムイオン、炭素イオン、ネオンイオン等)を発生させる。次に、粒子線発生/加速器101は発生させた陽イオンを加速器で所定のエネルギーまで加速する。具体的には、例えば、発生した陽イオンを直線加速器で加速し、その直線加速器から射出された陽イオンをさらにシンクロトロンなどでさらに加速することで所定のエネルギーまでの加速が行われる。そして、粒子線発生/加速器101は、所定のエネルギーを有する陽イオンを粒子線伝送部102に射出する。
【0017】
粒子線伝送部102は、粒子線発生/加速器101から粒子線照射部103へと繋がるビーム経路(不図示)を有している。粒子線伝送部102は、粒子線発生/加速器101から射出された陽イオンをビーム経路を経由させて粒子線照射部103へと伝送する。
【0018】
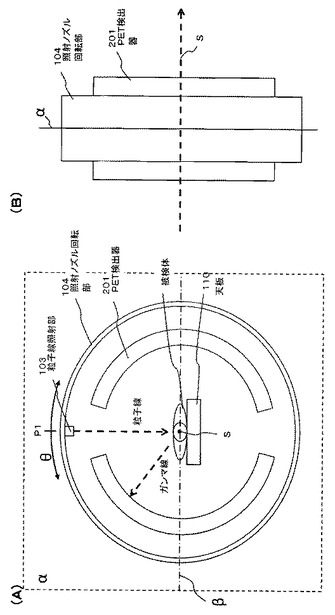
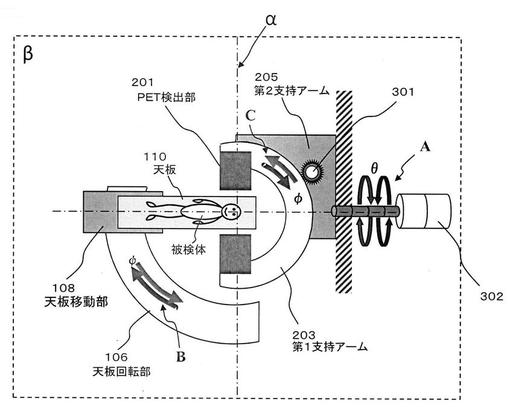
粒子線照射部103は、図2(A)に示すように照射ノズル回転部104の一部に設置されている。そして、粒子線照射部103は照射ノズル回転部104の回転とともに被検体の周りを回転可能となっている。粒子線照射部103は、粒子線伝送部102から伝送された陽イオンを被検体に向けて照射する。ただし、実際には粒子線照射部103は常に照射中心(アイソセンター)に向けて粒子線の照射を行う。粒子線照射部103の回転の基準位置を図2(A)のように位置P1に位置している状態とする。すなわち、被検体を真下に見る位置に粒子線照射部103が位置している状態を粒子線照射部103の角度θ=0の状態とする。この粒子線照射部103が本発明における「粒子線照射手段」にあたる。
【0019】
照射ノズル回転部104は、図2(A)に示すように側面から見ると中心軸Sを中心に円形をしているガントリー及び該ガントリーを回転させるモータ(不図示)で構成されている。ここで、図2(B)に示すように図2(A)の中心軸Sは照射中心を通過する軸で、図2(A)の紙面正面から裏面に向けて貫通している軸を表している。また以下の説明では、中心軸Sに直交し照射中心を貫通する平面を平面αとする。照射ノズル回転部104のガントリーは平面α内を回転移動するため平面αは固定平面である。そして、照射ノズル回転部104のガントリーは、図2(B)に示すように中心軸Sに沿う方向に厚みを有した略筒型の形状を有している。さらに、照射ノズル回転部104のガントリーは、中心軸Sを中心に回転を行う。これにより、粒子線照射部103も中心軸Sを中心に回転を行うことになる。本実施形態では、図2(A)における点P1を基準位置として点P1からの粒子線照射部103までの角度を平面αにおける照射角度とする。具体的には、中心軸Sに向けて照射角度θで粒子線を照射する場合には、照射ノズル回転部104のガントリーは照射角度θ分回転することになる。この照射ノズル回転部104が本発明における「照射ノズル回転手段」にあたる。
【0020】
天板110は床に平行で人が寝られる大きさの板状の形状を有している。天板110の上には、粒子線治療を行う対象である被検体(以下では、単に「被検体」と呼ぶ。)を載置する。この被検体が載置されている平面を「載置平面」と呼ぶことにする。天板110は、天板移動部108により載置した被検体の体軸方向またはその直交方向に並進移動が行われる。また、天板110は、天板回転部106により載置平面(天板110と平行な平面)内で回転移動が行われる。
【0021】
天板移動部108は、天板110を被検体の体軸方向またはその直交方向への並進移動を可能とする機構と、該並進移動を可能とする機構を動かすモータを有している。天板移動部108は、自己が有するモータを駆動することで天板110を被検体の体軸方向またはその直交方向に移動させる。具体的には、例えばモータによりギアなどの回転部材を回転させて、ギアとかみ合う水平移動部材が移動することで天板110が並進移動する構成になっている。この天板移動部108が本発明における「天板移動手段」にあたる。
【0022】
天板回転部106は、天板移動部108及び天板110を天板110と平行な平面内で回転可能とするための円盤、該円盤を動かすモータを有している。天板回転部106は、自己が有するモータを駆動することで天板110と平行な平面内で天板110及び天板移動部108をアイソセンターを中心に回転させることができる。すなわち、天板回転部106は、図3で示す矢印Bのように天板110及び天板移動部108を回転移動させる。この天板110と平行な平面でかつ被検体の体軸を含む平面を平面βとする。この天板回転部106が本発明における「天板回転手段」にあたる。
【0023】
PET部200は、図1に示すように、PET検出部201、画像生成部202、第1支持アーム203、第1制御部204、第2支持アーム205、及び第2制御部206から構成されている。
【0024】
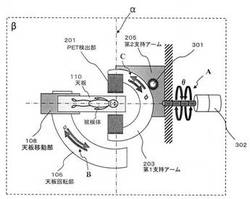
PET検出部201は、図2(A)に示すように、照射ノズル回転部104及び粒子線照射部103の内側に天板110及び天板110に載置された被検体を囲むように配置されている。そして、PET検出部201は、図2(B)に示すように中心軸Sに沿う方向に厚みを有し、さらに粒子線照射部103と照射中心との間に粒子線を通過させるための第1の開口部、及び被検体から見て粒子線照射部103と反対側の部分(第1の開口部と反対側の部分)に第2の開口部を有した略筒型の形状を有している。ここで、略筒型の形状とは被検体から一定距離の周囲の一定範囲を覆う形状であればよい。それぞれの開口部は小さいほどよく、後に説明するように粒子線の照射野が通過できる範囲の大きさがあればよい。第1の開口部及び第2の開口部によってPET検出部201の筒型は2つの部分(図2における紙面に対し左右対称のC字型の部分)に分割されている。そして、PET検出部201は、図3に示すように、第2支持アーム205の円弧部分に沿って動くようになっており、第2支持アーム205が水平の場合には第1支持アーム203で天板110と平行な平面βと平行な方向に回転可能に保持される。すなわち、PET検出部201は矢印Cで示すように平面βと平行な方向に回転移動する。さらに、PET検出部201は、図3に示すように、第2支持アーム205で図3における被検体の体軸方向の周りに回転可能に保持されている。すなわち、図3の状態(すなわち、未だいずれの方向にも回転を行っていない状態)ではPET検出部201は矢印Aで示すように平面αと平行な平面内で回転移動する。このPET検出部201が本発明における「PET検出器」にあたる。
【0025】
ここで、本実施形態では、被検体に照射された粒子線のうち被検体を通過した粒子線がPET検出部201あたることで障害が発生したり故障したりすることの回避、及び天板110へのPET検出部201の接触の回避のために第2の開口部を設けている。ただし、粒子線が被検体を通過する量は極めて少ないと考えられるため、PET検出部201に微小の粒子線があたることを許容でき、低い角度(天板110とPET検出部201が接触するような角度)からの粒子線の照射を行わない場合には第2の開口部を有さない構成にしてもよい。この点、PET検出部201の形状をより大きな筒形にすれば天板110との接触が避けられるとも考えられるが、この場合PET検出部201が被検体から離れた位置に配置されることになり、γ線の検出効率が低下するため好ましくない。
【0026】
PET検出部201は、最も一般的な構成では、前述の筒型の部分の内側の全面に多数のシンチレータアレイが配置されている。シンチレータアレイは、γ線を検出するシンチレータ結晶と微弱光パルスを高速かつ高感度に検出する光電子倍増管から構成されている。そして、PET検出部201は、粒子線照射部103から照射された粒子線が被検体の体内にあたることで発生したγ線をシンチレータアレイで検出する。さらに、PET検出部201は、検出したγ線に基づく電気信号を画像生成部202へ出力する。
【0027】
画像生成部202は、PET検出部201から電気信号の入力を受信する。画像生成部202は、受信した電気信号に対し同時計測などの信号処理を行った後、画像処理によりPET画像を生成する。画像生成部202は生成したPET画像を表示制御部020へ出力する。この画像生成部202が本発明における「画像生成手段」にあたる。
【0028】
表示制御部020は、画像生成部202から入力されたPET画像をユーザインタフェース010の表示部012に表示させる。この様に、被検体に粒子線が当たった際に放出されるγ線の発生した位置を表したPET画像が表示部012に表示されることで、操作者は被検体における粒子線があたった位置を把握することができ、その画像を基に粒子線の照射位置を調整できる。これにより、より正確に照射対象部位に粒子線の照射を行うことが可能となる。
【0029】
第1支持アーム203は、本実施形態では図3に示すように天板110と逆方向から被検体を見下ろした状態でC字型の形状をしている。さらに、第1支持アーム203は該C字型の部材を回転させるためのモータを有している。そして、第1支持アーム203のC字型の部材の両端にはPET検出部201の2分割された筒型の各部分がそれぞれ固定されている。第1支持アーム203は矢印Cの方向にPET検出部201を保持した状態でモータを駆動させることで、PET検出部201の2つの開口部を通過する軸を中心にPET検出部201を回転させる。例えば、第1支持アーム203が図3の状態からモータによりC字型の部材を角度φ回転することで、PET検出部201は平面βと平行な方向に粒子線の放射方向の軸を中心に角度φ回転する。ここで、本実施形態では第1支持アーム203はC字型としたが、これはPET検出部201の2つの部材を向き合う形で固定できる形状で回転可能な形状あれば他の形状でもよい。
【0030】
第2支持アーム205は、図3に示すように第1支持アーム203を保持することでPET検出部201を保持する保持部材と、該保持部材を回転させるモータで構成されている。第2支持アーム205は、第1支持アーム203及びPET検出部201を被検体の体軸方向の周りに回転可能となるように保持している。第2支持アーム205はモータを駆動することで保持部材を回転させ、それにより第1支持アーム203を矢印Aの方向に回転させる。そして、第2支持アーム205に保持された第1支持アーム203が被検体の体軸方向の周りに回転することで、第1支持アーム203に保持されたPET検出部201が被検体の体軸方向の周りに回転移動を行うことになる。例えば、図3に示されている初期の状態では、第1支持アーム203によるPET検出部201の回転が行われていないため、PET検出部201と照射ノズル回転部104とは同じ回転平面を有する。すなわち、第2支持アーム205が角度θ回転することより、PET検出部201は平面α内を図3における被検体の体軸を中心に角度θ回転する。
【0031】
本実施形態に係る粒子線治療装置では、治療計画に含まれる粒子線の照射方向に基づいて、適切な方向から粒子線の照射が行えるように、操作者が粒子線照射部103、天板110、及びPET検出部201を手動で各部材が接触しないように移動させる。すなわち、操作者は、粒子線照射部103の回転及び天板110の回転/並進移動を調整することにより粒子線の適切な照射方向を決定し、さらに、その粒子線の照射野をPET検出部201が遮らないように、且つPET検出部201の開口部を照射方向の中心軸が通過するようにPET検出部201を移動させる。これにより、適切な方向からの被検体への粒子線の照射と、その時に発生するγ線の検出及びPET画像の生成並びに表示を行うことが可能となる。
【0032】
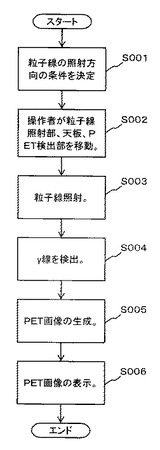
次に、図4を参照して本実施形態に係る粒子線治療装置の粒子線照射及びPET画像の作成の流れを説明する。図4は本実施形態に係る粒子線治療装置の粒子線照射及びPET画像の作成のフローチャート図である。
【0033】
ステップS001:操作者は、粒子線の照射の方向の条件を含む治療計画を作成する。
【0034】
ステップS002:操作者は、治療計画における粒子線の照射の方向の条件を基に、粒子線照射部103、天板110、PET検出部201を移動させる。
【0035】
ステップS003:粒子線照射部103は、粒子線を被検体の照射対象部位に向けて照射する。
【0036】
ステップS004:PET検出部201は、粒子線が照射され被検体で発生したγ線をシンチレータアレイで検出し、検出したγ線に基づく電気信号を同時計測などの信号処理を行った後、画像生成部202に送信する。
【0037】
ステップS005:画像生成部202は、PET検出部201より入力された電気信号を処理しPET画像を生成して表示制御部020に送信する。
【0038】
ステップS006:表示制御部020は、画像生成部202から入力されたPET画像を表示部012に表示させる。
【0039】
以上で説明したように、本実施形態に係る粒子線治療装置は、任意の方向に開口部を向けることができる被検体の周囲のほぼ全域を囲うPET検出部を備えた構成である。これにより、PET検出部に遮られることなく任意の方向から粒子線を被検体に向けて照射できるとともに、PET装置の視野を最大限にして精度よくγ線の検出を行うことが可能となる。したがって、本実施形態に係る粒子線治療装置は、粒子線治療の効果の向上に利用することができる。
【0040】
〔第2の実施形態〕
以下、この発明の第2の実施形態に係る粒子治療装置について図1〜図6を参照して説明する。本実施形態にかかる粒子線治療装置は、入力された粒子線の照射の方向の条件に基づいて、粒子線照射部(照射ノズル)、天板、PET検出部を自動的に移動させる構成であることが第1の実施形態と異なるものである。本実施形態に係る粒子線治療装置の機能ブロック図は第1の実施形態に係る図1の機能ブロック図に点線で示す機能部を加えた構成である。図5は本実施形態に係る粒子線治療装置における、入力された照射条件に基づく、天板、粒子線照射部、及びPET検出部の回転移動を説明するための図である。図6は、回転移動の角度を算出するため、図5を局所直交座標系で表わした図である。以下の説明では、第1の実施形態と同じ符号を有する機能部は、特に説明のない限り同じ機能を有するものとする。
【0041】
図1の点線で示すように、本実施形態に係る粒子線治療装置は、照射ノズル回転部104による粒子線照射部の回転を制御する照射ノズル回転制御部105、天板回転部106による天板110の回転を制御する天板回転制御部107、天板移動部108による天板110の並進移動を制御する天板移動制御部109、第1支持アーム203によるPET検出部201の回転を制御する第1制御部204、及び第2支持アーム205によるPET検出部201の回転を制御する第2制御部206を有する。
【0042】
粒子線発生/加速器101で発生・加速された陽イオンは、粒子線伝送部102に射出される。 粒子線伝送部102は、陽イオンをビーム経路を経て粒子線照射部103へと伝送する。粒子線照射部103は被検体に向けてこの荷電粒子を照射する。
【0043】
粒子線照射部103及び照射ノズル回転部104の構造は図2(A)及び図2(B)で示す第1の実施形態と同様である。照射ノズル回転部104は、アイソセンター(回転軸S上にある)に向けて照射角度θで粒子線を照射する場合には、粒子線照射部103を照射角度θ回転させる。
【0044】
照射ノズル回転制御部105は、CPU及びエンコーダを有している。該エンコーダは照射ノズル回転部104のガントリーの回転移動した量を求めるためのエンコーダである。照射ノズル回転制御部105は入力部011から入力された照射方向の条件に基づいて、粒子線照射部103の回転を制御する。具体的には、照射ノズル回転制御部105は、入力部011から入力された照射条件を基に照射ノズル回転部104を回転させる角度θを算出する。この入力された照射条件に基づく照射ノズル回転部104の回転角度θの算出方法は後で詳細に説明する。次に、照射ノズル回転制御部105は、照射ノズル回転部104に回転の命令を送信し照射ノズル回転部104の回転を開始させる。そして、照射ノズル回転制御部105は、自己が有するエンコーダを用いて照射ノズル回転部104の回転した量を取得し、該角度が算出した角度θに達したときに照射ノズル回転部104に対し停止命令を送信し照射ノズル回転部104の回転を停止させる。ここで、照射ノズル回転制御部105は本発明に係る「照射ノズル回転制御手段」にあたる。
【0045】
天板110、天板移動部108、及び天板回転部106の構造は第1の実施形態と同様である。
【0046】
天板移動制御部109は、CPU及びエンコーダを有している。該エンコーダは天板110の並進移動した距離を求めるためのエンコーダである。例えばモータによりギアなどの回転部材を回転させ、ギアとかみ合う並進移動部材を移動させることで天板110が並進移動する構成では、エンコーダが回転部材の回転量を取得することで天板110の並進移動した距離を求めることができる。天板移動制御部109は、入力部から入力された照射条件を基に天板110を体軸方向に並進移動させるそれぞれの距離Lを算出する。この距離Lが並進移動させる目標とする距離となる。この入力された照射条件に基づく天板110の並進移動距離Lの算出方法は後で詳細に説明する。次に、天板移動制御部109は、天板移動部108に天板110の並進移動の命令を送信してモータの駆動を開始させ、天板110の並進移動を開始させる。そして、天板移動制御部109は、自己が有するエンコーダを用いて天板移動部108が有する回転部材の回転量を取得し、その回転量から天板110の並進移動した距離を算出する。そして、天板移動制御部109は、天板110の並進移動した距離が目標とする並進移動距離Lに達したときに天板移動部108に対し停止命令を送信して天板移動部108のモータを停止させ、天板110の並進移動を停止させる。ここで、天板移動制御部109は本発明に係る「天板移動制御手段」にあたる。
【0047】
天板回転制御部107は、CPU及びエンコーダを有している。該エンコーダは天板110と平行な平面β内での天板110の回転量を求めるためのエンコーダである。天板回転制御部107は、入力部011から入力された照射条件に基づいて天板110と平行な平面βでの天板110の回転させる回転角度ψを算出する。この入力された照射条件に基づく天板110の回転角度ψの算出方法は後で詳細に説明する。次に、天板回転制御部107は、天板回転部106に天板110の回転の命令を送信してモータの駆動を開始させ、平面βと平行な面内で天板110の回転を開始させる。そして、天板回転部106は、自己が有するエンコーダを用いて天板回転部106の回転した回転量を取得する。そして、天板回転制御部107は、天板110の回転量が目標とする回転角度ψに達したときに天板回転部106に対し停止命令を送信して天板回転部106のモータを停止させ、天板110の回転を停止させる。ここで、天板回転制御部107は本発明に係る「天板回転制御手段」にあたる。
【0048】
PET検出部201、第1支持アーム203、及び第2支持アーム205は、図3に示す第1の実施形態と同様の構造を有している。
【0049】
本実施形態に係るPET検出部201も被検体の周りを囲うように配置され、且つ2分割された略筒型をしている。PET検出部201は第1支持アーム203に取り付けられ、第1支持アーム203は矢印Cで示すように第2支持アーム205の円弧部分に沿って(平面βと平行な方向)に回転移動する。さらに、第2支持アーム205は、図3に示されている矢印Aの方向(平面αと平行な方向)に回転移動する。
【0050】
第1支持アーム203は、PET検出部201の2つの開口部を通過する軸の周りにPET検出部201の回転移動を行う。例えば、第1支持アーム203が図3の状態からモータによりC字型の部材を角度φ回転することで、PET検出部201は粒子線の放射方向の軸の周りに角度φだけ回転する。
【0051】
第1制御部204は、CPU及び図3に示すエンコーダ301を備えている。エンコーダ301は第1支持アーム203のC字型の部材が回転した回転量を検出する。第1制御部204は、入力部011から入力された照射方向の条件を基に、第1支持アーム203のC字型の部材を回転させる角度φを算出する。次に、第1制御部204は第1支持アーム203に対し回転の命令を送信してモータの駆動を開始させ、第1支持アーム203のC字型の部材の回転を開始させる。そして、第1制御部204は、自己が有するエンコーダ301を用いて第1支持アーム203のC字型の部材が回転した回転量を取得する。そして、第1制御部204は、第1支持アーム203の回転した回転量が目標とする回転角度φに達したときに第1支持アーム203に対し停止命令を送信して第1支持アーム203のモータを停止させ、第1支持アーム203のC字型の部材の回転を停止させる。このとき、第1支持アーム203が回転することで第1支持アーム203に固定されたPET検出部201も同様の回転移動を行う。ここで、第1制御部204は本発明に係る「第1制御手段」にあたる。
【0052】
第2支持アーム205は、PET検出部201を搭載した第1支持アーム203を照射ノズル回転部104(回転ガントリー)の回転軸の周りに回転させる。例えば、図3の状態では第2支持アーム205が角度θ回転することより、PET検出部201は平面α内を図3における被検体の体軸の周りに角度θ回転することになる。
【0053】
第2制御部206は、CPU及び図3に示すエンコーダ302を備えている。エンコーダ302は第2支持アーム205の保持部材が回転した回転量を検出する。第2制御部206は、入力部011から入力された照射方向の条件に基づいて、第2支持アーム205の保持部材を回転させる角度θを算出する。次に、第2制御部206は第2支持アーム205に対し回転の命令を送信してモータの駆動を開始させ、第2支持アーム205のC字型の部材の回転を開始させる。そして、第2制御部206は、自己が有するエンコーダ302を用いて第2支持アーム205の保持部材が回転した回転量を取得する。そして、第2制御部206は、第2支持アーム205の回転した回転量が目標とする回転角度θに達したときに第2支持アーム205に対し停止命令を送信して第2支持アーム205のモータを停止させ、第2支持アーム205の保持部材の回転を停止させる。このとき、第2支持アーム205の保持部材が回転することで第1支持アーム203のC字型の部材が回転し、さらに第1支持アーム203のC字型の部材に固定されたPET検出部201も同様の回転移動を行う。ここで、第2制御部206は本発明に係る「第2制御手段」にあたる。
【0054】
また、以上の照射ノズル回転制御部105、天板回転制御部107、天板移動制御部109、第1制御部204、及び第2制御部206を合わせたものが本発明における「制御手段」にあたる。
【0055】
(各部材の回転角度の算出方法)
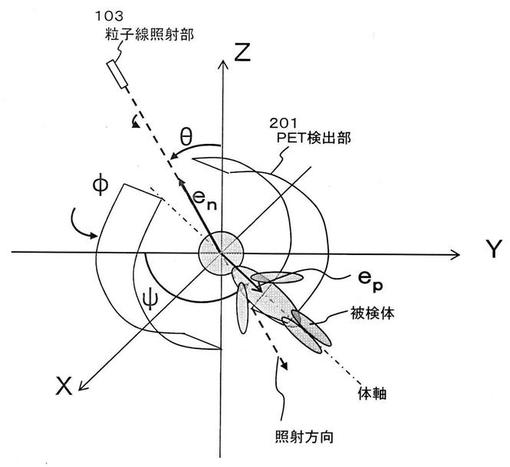
次に、図5及び図6を参照して、治療計画に基づく、照射ノズル回転部104による粒子線照射部103の回転角度θ、天板回転部106による天板110の回転角度ψ、第1支持アーム203によるPET検出部201の回転角度φ、及び第2支持アーム205によるPET検出部201の回転角度ηを算出する方法を詳細に説明する。図5は被検体への粒子線の照射方向を表すベクトルを表した図である。ここで、図5の座標系は被検体が寝ている平面βをXY平面とし、粒子線照射部103及び照射ノズル回転部104が動く平面αをYZ平面にした直交座標空間である。この図5の直交座標系を0−XYZと呼ぶことにする。
【0056】
操作者は、予めX線診断装置などで撮像した被検体の患部の画像を基に、その患部を粒子線の照射対象部位とする治療計画を立てる。この治療計画には、粒子線の照射侵入位置及び方向の条件、粒子線の照射量などが含まれる。そして、操作者は、粒子線の照射方向をベクトルとして入力する。この入力は、操作者が、ユーザインタフェース010に表示された被検体の照射対象部位が原点に配置された三次元座標空間を参照し、その照射対象部位、すなわち原点に向けて照射したい始点を指定することで、その座標の原点から指定された始点へのベクトルが指定され、そのベクトルが照射方向の条件として入力される。ここで、ベクトルとはあくまでも方向を表すだけの意味で用いており、その大きさは問題にはしない。そこで、ここでは、便宜上入力されるベクトルは大きさ1の単位ベクトルとする。以下、このベクトルをenとする。enは単位ベクトルであるので|en|=1となっている。
【0057】
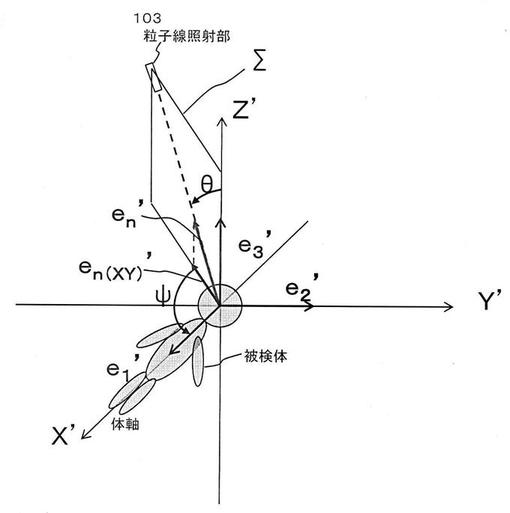
ここで、操作者にとって照射方向は照射対象の中心を通り且つ体軸を基準とした直交座標系で表すことがわかりやすいことから、被検体の体軸が一つの軸と一致する局所直交座標系を考える。そこで、この局所直交座標系のそれぞれの軸をX’Y’Z’軸とし、0’−X’Y’Z’の座標系とする。そして、X’軸、Y’軸、Z’軸方向の単位ベクトルをそれぞれ、e1’、e2’、e3’とおく。被検体を載置した天板110は水平に保たれたまま、平行移動や回転移動が行われるため、Z軸とZ’軸は同じ方向を向いているものとする。すなわち、e3’=e3である。そして、入力された粒子線の照射の条件であるenは0’−X’Y’Z’の座標系ではen’で表わされるものとする。この局所直交座標系における模式図が図6である。
【0058】
まず、照射ノズル回転部104による粒子線照射部103の回転量θを算出する。図5における粒子線照射部103が回転する0−XYZにおけるYZ平面は、図6で示されるen’とe3’が張る平面Σに対応している必要がある。そのため、en’とe3’がなす角度がθになる。したがって、粒子線照射部103の回転角度、すなわち、照射ノズル回転部104の回転角度θは、
cosθ=(en’・e3’)/|en’|・|e3’|=(en’・e3’)
と表わされる。
(ここで、(A・B)は、ベクトルAとベクトルBとの内積を表す。また、(A×B)はベクトルAとベクトルBとの外積を表す。以下同じ。)
したがって、
θ=cos−1((en’・e3’))
と求められる。
【0059】
次に、天板回転部106による天板110の回転量ψを算出する。図5に示されるように、天板回転部106の回転角度ψは、en’のX’Y’平面の正射影成分en(XY)’と、e1’とがなす角度となることから、
cosψ=[{en’−(en’・e3’)e3’}・e1’]/|en’−(en’・e3’)e3’|・|e1’|=[{en’−(en’・e3’)e3’}・e1’]/|en’−(en’・e3’)e3’|
したがって、
ψ=cos−1[{en’−(en’・e3’)e3’}・e1’]/|en’−(en’・e3’)e3’|
と求められる。
【0060】
ここで、被検体の体軸方向の単位ベクトルe1’(X’軸方向の単位ベクトル)は、直交座標系0−XYZ上における被検体の体軸方向の単位ベクトルepに対応する。したがって、先に求めた天板回転部106による天板110の回転量ψを用いて表すと、
ep=(sinψ,−cosψ,0)
と表わされる。
【0061】
また、直交座標系0−XYZ上における粒子線の照射の方向の中心軸の単位ベクトルenを先に求めた照射ノズル回転部104による粒子線照射部103の回転量θを用いて表すと、
en=(0,−sinθ,cosθ)
と表わされる。
【0062】
次に、PET検出部201を回転移動させる第1支持アーム203の回転角度φ、及び第2支持アーム205の回転角度ηを算出する。ここで、本実施形態では図3の状態(第1支持アーム203及び第2支持アーム205の何れも回転を行っていない状態)から、先ず第2支持アーム205によりPET検出部201を平面α内で回転させ、粒子線照射部103から粒子線の照射方向の中心軸がPET検出部201の開口部を通過するように回転角度ηを求め、次に、回転角ηの第2支持アーム205による回転を行った状態を想定し、その状態で第1支持アーム203を粒子線照射部103から粒子線の照射方向の中心軸の周りに回転させて、PET検出部201が天板110に直交する角度になるように回転角度φを求める。ここで、PET検出部201を天板110に直交する角度にする理由は、PET検出部201を含む平面Π(以下、単に「平面Π」という)が粒子線の照射方向の単位ベクトルenと被検体の体軸方向の単位ベクトルepが張る平面と直交していれば、PET検出部201と被検体を載置した天板110との干渉が防止できるからである。
【0063】
そこで、第2支持アーム205によるPET検出部201の回転角度ηを考える。粒子線照射部103は先に求めた回転量θの回転を行っている。そして、図3の状態ではPET検出部201は照射ノズル回転部104と同じ平面αに位置している。したがって、PET検出部201は平面α内を回転量θ分移動することで、PET検出部201の開口部が粒子線照射部103からの粒子線の照射方向に一致することになる。すなわち、回転量θの回転を行うことで粒子線の照射方向の中心軸は開口部を通過するようになる。したがって、理想的には第2支持アーム205の回転角度ηは照射ノズル回転部104による粒子線照射部103の回転角度θと一致すればよい。すなわち、η=θとなる。
【0064】
ここで、上記の制御では、第2支持アーム205によるPET検出部201の回転角度ηと照射ノズル回転部104による粒子線照射部103の回転角度θを一致させていたが、実用上は正確に一致する必要はなく、粒子線の照射野がPET検出部201の開口部を通過する位置ならば多少のずれは許容される。PET検出部201と天板110が機械的に干渉しなければ、例えば±10度のずれが許容されるといったこともありうる。
【0065】
次に、第2支持アーム205によってPET検出部201が平面α内を回転角度θ回転させられた状態での、第1支持アーム203によるPET検出部201の粒子線の照射方向の中心軸周りの回転角度φを求める。図3の状態から第2支持アーム205によってPET検出部201が平面α内で角度θ回転させられた状態を第1支持アーム203の回転の基準、すなわちφ=0と決める。そしてφ=0の場合、平面Πと平面α(YZ平面)は一致しており、平面Πの法線はX軸と平行になる。このとき、「enとepの外積」と「X軸(=e1)」のなす角度がφになる。ここで、enとepは、前述したようにすでに求められていることに注意されたい。
そこで、
cosφ=(en×ep)・e1/|en×ep|・|e1|=(en×ep)・e1/|en×ep|
が成り立ち、
φ=cos−1{cosθ・cosψ/(1−sin2θ・cos2ψ)1/2}
としてφが求められる。
【0066】
ここで、特殊なケースとして、上述のφの分母が0になる場合、すなわちθ=π/2(rad)で且つθ=0(rad)の場合は、上述のφは不定になってしまう。この場合、便宜的にφ=0(rad)(X軸が平面Πに含まれている状態、すなわち被検体の左右にPET検出部201が配置された状態)、又はφ=π/2(rad)(X軸が平面Πと直交している場合、すなわち被検体の腹部と背面にPET検出部201が配置された状態)に第1支持アーム203の制御を行うように決めておけばよい。
【0067】
そして、算出した回転角度を基に、それぞれの部材の回転を実行することで被検体の体軸の方向は入力された照射方向の条件に適合するように移動される。そこで、最後に天板移動部108は、体軸が適切に移動させられた状態での天板の位置に載置した被検体の照射対象部位を照射方向の中心軸が通過するように天板を並進移動させる距離Lを求める。
【0068】
以上のように、被検体の体軸方向と粒子線照射部103からの粒子線の照射方向が決定されると、照射ノズル回転部104による粒子線照射部103の回転角度θ、天板回転部106による天板110の回転角度ψ、第1支持アーム203によるPET検出部201の回転角度φ、及び第2支持アーム205によるPET検出部201の回転角度ηを一意的に決定できる。この求めた回転角度により照射ノズル回転部104、天板回転部106、第1支持アーム203、及び第2支持アーム205をそれぞれ制御することで、被検体に対し適切な方向から粒子線の照射の方向の中心軸がPET検出部201の開口部を通過するように、粒子線の照射を行うことができ、また、天板110及びPET検出部201が接触するなどの機械的な干渉を防止することが可能となる。以上では、説明の都合上それぞれの回転角度の算出を順番に説明したが、それぞれの角度の算出の順番はどのような順序でもよい。また、それぞれの部材の回転移動の順番はどのような順序でもよく、本実施形態における制御はそれぞれの回転角度を求めた後に、その回転角度を基に照射ノズル回転部104、天板回転部106、第1支持アーム203、及び第2支持アーム205による粒子線照射部103、天板110、及びPET検出部201の回転移動をそれぞれが接触しないように連動して行うものである。
【0069】
次に、図7を参照して本実施形態に係る粒子線治療装置の粒子線照射及びPET画像の作成の流れを説明する。図7は本実施形態に係る粒子線治療装置の粒子線照射及びPET画像の作成のフローチャート図である。
【0070】
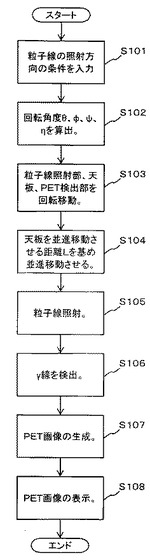
ステップS101:操作者は、ユーザインタフェース010を用いて粒子線の照射の方向の条件を入力する。
【0071】
ステップS102:入力された照射の方向の条件を基に、照射ノズル回転制御部105、天板回転制御部107、第1制御部203、及び第2制御部206はそれぞれ、照射ノズル回転部104による粒子線照射部103の回転角度θ、天板回転部106による天板110の回転角度ψ、第1支持アーム203によるPET検出部201の回転角度φ、及び第2支持アーム205によるPET検出部201の回転角度ηを算出する。
【0072】
ステップS103:算出した回転角度を基に、照射ノズル回転制御部105は照射ノズル回転部104を制御して粒子線照射部103を回転させ、天板回転制御部107は天板回転部106を制御して天板110を回転させ、第1制御部204は第1支持アーム203を制御してPET検出部201を回転させ、第2制御部206は第2支持アーム205を制御してPET検出部201を回転させる。
【0073】
ステップS104:天板移動制御部109は、入力された照射の方向の条件に基づいて並進移動する距離Lを求め、天板110を距離Lだけ並進移動させる。
【0074】
ステップS105:粒子線照射部103は、粒子線を被検体の照射対象部位に向けて照射する。
【0075】
ステップS106:PET検出部201は、粒子線が照射され被検体で発生したγ線をシンチレータアレイで検出し、検出したγ線に基づく電気信号を同時計測などの信号処理を行った後、画像生成部202に送信する。
【0076】
ステップS107:画像生成部202は、PET検出部201より入力された電気信号を処理しPET画像を生成して表示制御部020に送信する。
【0077】
ステップS108:表示制御部020は、画像生成部202から入力されたPET画像を表示部012に表示させる。
【0078】
以上で説明したように、本実施形態に係る粒子線治療装置は、粒子線の照射の方向の条件を入力することで、その照射の方向の条件に対応した位置に粒子線照射部、天板、及びPET検出部を相互に機械的な干渉を起こさないように、自動的に移動させる構成となっている。これにより、操作者による各部の移動の負荷を軽減できるとともに、被検体の照射対象部位への任意の角度からの正確で効果的な粒子線の照射を行うことが可能となる。また、PET検出部の視野を最大限にしてγ線の検出の精度を向上させることができる。さらに、各部材同士が接触して破壊されるといった事故も防止可能である。
【図面の簡単な説明】
【0079】
【図1】本発明に係る粒子線治療装置のブロック図
【図2】(A)本発明に係る粒子線治療装置の模式的な正面図、(B)本発明に係る粒子線治療装置の模式的な側面図
【図3】本発明に係る粒子線治療装置の模式的な上面図
【図4】第1の実施形態に係る粒子線治療装置の粒子線照射及びPET画像の作成のフローチャート図
【図5】本実施形態に係る粒子線治療装置における入力された照射条件に基づく天板、粒子線照射部、及びPET検出部の回転移動を説明するための図
【図6】回転移動の角度を算出するため、図5を局所直交座標系で表した図
【図7】第2の実施形態に係る粒子線治療装置の粒子線照射、及びPET画像の作成のフローチャートの図
【符号の説明】
【0080】
010 ユーザインタフェース
011 入力部
012 表示部
020 表示制御部
100 粒子線治療部
101 粒子線発生/加速器
102 粒子線伝送部
103 粒子線照射部
104 照射ノズル回転部
105 照射ノズル回転制御部
106 天板回転部
107 天板回転制御部
108 天板移動部
109 天板移動制御部
200 PET部
201 PET検出部
202 画像生成部
203 第1支持アーム
204 第1制御部
205 第2支持アーム
206 第2制御部
【技術分野】
【0001】
本発明は、加速させた粒子線を利用して例えば癌などの治療を行う粒子線治療装置及びその制御方法に関する。さらに詳しくは、粒子線が照射された患部から放射されるγ線を検知するPET(Positron Emission Tomography)装置を備えた粒子線治療装置及びその制御方法に関する。
【背景技術】
【0002】
近年、加速された荷電粒子線(以下、単に「粒子線」という)は停止直前に最大のエネルギーを放出する現象(このエネルギー・ピークは「ブラッグ・ピーク(Bragg Peak」と呼ばれる)が生じることを利用して、粒子線を患部に照射することで癌細胞を破壊する粒子線治療が行われ始めている。X線を含む放射線は体内を単調減衰しながら患部の前後を通過していくため、患部以外の正常組織にもダメージを与えてしまう。これに対し、加速された荷電粒子(例えば、陽子、炭素原子核など)が物質内を通過するとき、前述のようにブラッグ・ピークが生じるため、荷電粒子の停止位置を精密に制御することにより、被検体における患部までに通過する部分および患部の背後部分へのダメージを抑えることができる。
【0003】
この粒子線治療において被検体に対し粒子線を照射する装置が粒子線治療装置である。この粒子線治療装置において、照射された粒子線は、体内にある原子と衝突し陽電子放射核を生成する。この放射核から放出された陽電子は、その近傍に多数ある電子と結合してγ線を放射する。この現象は「自己放射化」と呼ばれている。そして、この放射されたγ線は、例えばシンチレータと光電子増倍管が組み合わされたシンチレーション検出器により検出することができる。この体内から放出されるγ線をシンチレーション検出器により検出する装置はPET(Positron Emission Tomografhy)装置と呼ばれる。近年、粒子線治療装置から照射された荷電粒子がどの深さまで到達したかを癌細胞の破壊と同時に観察するために上述の自己放射化の現象を利用する技術が提案されている。この様な理由から、最近、粒子線治療装置にPET装置を付加することが検討され始めている。
【0004】
粒子線治療装置では粒子線はノズルから照射されるが、この粒子線の侵入位置、及び照射方向は正常組織へのダメージなどを考慮して治療の見地から決められる。すなわち、「患部の位置」、「正常組織への照射回避」、及び「重要な臓器への影響の回避」を考慮してその照射方向が決められる。具体的には、正常組織への照射を抑えるため、粒子線が被検体の体表から患部に到達するまでの経路が極力最短経路となるようにしたり、重要な臓器に粒子線が当たらないように配慮したりするという条件の下で粒子線の照射方向が決定される。このため、粒子線治療装置には任意の照射方向から粒子線を照射できる性能が要求される。そこで、粒子線治療装置では、任意の照射方向を実現するために回転稼働する回転ガントリー及び回転機能を備えた寝台が使用される。磁場で偏向させやすい陽子を使用する「陽子線治療装置」には、粒子線を照射するノズルの向きが被検体が寝ている平面に直交する平面内で照射中心(アイソセンター)の周りに回転することで、照射角度を任意に設定することができる回転ガントリーが装備されていることが多い。この回転ガントリーでは、加速器で加速されて水平方向に飛来する荷電粒子ビームを任意の方向に曲げて最終的に振り下ろすといった偏向動作が行われる。最近では、炭素原子核を利用する重粒子線治療装置においても、超電導磁石を使用した回転ガントリーを装備することが検討されて始めている。さらに、寝台の基部は被検体が寝ている平面内をアイソセンターを中心に回転する円盤上に固定されており、寝台の天板はその基部に対して並進移動が可能なように作られている。これにより、被検体に対し任意の方向から粒子線を照射できるようになっている。
【0005】
従来の粒子線治療装置では、「直前に行った装置の校正・チェック」、「患者の位置決めとその補正」、及び「患者の固定」により、治療計画(照射計画)通りに照射されたとみなすことで、期待通りの照射が行われたと判断るものであった。そのため、作業途中で入ってくる照射ミスや照射誤差などが見過ごされる危険性があった。これらの問題を解決するため、PET装置を付加し、自己放射化を利用することで、照射された荷電粒子が停止した位置を直接画像として観察する技術(例えば、特許文献1参照。)が提案及び検討されている。
【0006】
【特許文献1】特開平9−189769号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
医師や放射線治療技師などの操作者(以下では、単に「操作者」という)は、患部の位置、PET装置、及び寝台の配置を考慮して、それぞれが総合に接触しないように照射ノズルの方向、寝台の位置、及び寝台の回転角度を設定する必要がある。従来は操作者の経験による目分量でそれらを粗調し、その後マーカー位置などで微調するという方法をとっていた。しかし、従来のPET装置を備えた粒子線治療装置では、PET装置がガントリーに対して固定されているため、患部位置やPET装置の配置などを優先して照射ノズルの回転角度と寝台の回転角度を調整しながら照射方向を決定する必要があり、最適な位置及び方向から粒子線を照射することが困難であるという場合が少なくなかった。
【0008】
PET装置は検出器が並べられた範囲しか検出領域を持たず、かつ寝台を患者の体軸方向に移動させながら全身の断層像を得る動作を前提としていたため。PET検出器は円筒状に配置されていることが多い。また、粒子線治療装置は、荷電粒子を照射ノズルから照射し患部に到達させるものなので、荷電粒子が侵入した体表面から患部までの正常組織に軽微であってもダメージを与えてしまう。そのため、患部及びダメージを受ける可能性がある部位をリアルタイムにできるだけ正確に観察・確認しながら照射したいという理由から、PET装置で観察する断層面は、粒子線の照射方向(すなわち、照射ノズルの方向)を表す軸を含む断層面であることが最も望ましい。またPET装置の視野は検出器の並べられた範囲の広さで決まり、その範囲が狭いとγ線の同時計測においてその信号を取り逃してしまう確率が増加してしまう。しかし、モニタリング用のPET装置が固定された粒子線治療装置では、粒子線の照射方向に自由度を持たせるため多数の検出器を略円筒状に並べることは困難であった。さらに、任意の位置から照射された粒子線の照射方向を示す軸を含む断層面にPETを配置することも困難であった。
【0009】
この発明は、このような事情に鑑みてなされたもので、任意の方向から粒子線を照射可能であって、かつ被検体から発生されるγ線を検出するPET検出器を備えた粒子線治療装置及びその制御方法を提供することを目的としている。
【課題を解決するための手段】
【0010】
上記目的を達成するために、請求項1に記載の粒子線治療装置は、被検体を載置する天板と、前記天板を載置平面内で回転させる天板回転手段と、前記天板を前記被検体の体軸方向に並進移動させる天板移動手段と、前記天板に載置された前記被検体に向けて粒子線を照射する粒子線照射手段と、前記粒子線照射手段を前記載置平面と直交する特定の平面内で被検体の周りを回転移動させる照射ノズル回転手段と、前記粒子線照射手段と前記被検体との間に、略筒型の形状で該筒内に前記被検体を囲うように配置され、かつ粒子線照射手段からの前記粒子線を通過させる開口を有し、前記粒子線が前記被検体に照射されたときに発生するγ線を検出するPET検出器と、前記PET検出器を前記粒子線の照射方向の軸の周りに回転可能に保持する第1支持アームと、前記第1支持アームを前記体軸の周囲に回転可能に(より詳しくは、前記照射ノズル回転手段の回転軸の周りに)保持する第2支持アームと、前記PET検出器で検出されたγ線を基に画像を生成する画像生成手段と、を備えたことを特徴とするものである。
【0011】
請求項7に記載の粒子線治療装置制御方法は、被検体を載置する天板と、前記天板を載置平面内で回転させる天板回転手段と、前記天板を前記被検体の体軸方向に並進移動させる天板移動手段と、前記天板に載置された前記被検体に向けて粒子線を照射する粒子線照射手段と、前記粒子線照射手段を前記載置平面と直交する特定の平面内で被検体の周りを回転移動させる照射ノズル回転手段と、前記粒子線照射手段と前記被検体との間に、略筒型の形状で該筒内に前記被検体を囲うように配置され、かつ粒子線照射手段からの前記粒子線を通過させる開口を有し、前記粒子線が前記被検体に照射されたときに発生するγ線を検出するPET検出器と、前記PET検出器を前記粒子線の照射方向の軸に回転可能に保持する第1支持アームと、前記第1支持アームを前記体軸の周りに(より詳しくは、前記照射ノズル回転手段の回転軸の周りに)回転可能に保持する第2支持アームと、前記PET検出器で検出されたγ線に基づいて画像を生成する画像生成手段と、を備えた粒子線治療装置を制御する粒子線治療装置制御方法であって、前記粒子線照射手段の回転の角度にかかわらず照射された粒子線が常に通過する点である照射中心を原点とする座標空間のベクトルで表される前記被検体への粒子線の照射方向の条件を入力として受ける段階と、前記ベクトルに基づいて、前記粒子線照射手段の回転角度θを算出し、前記粒子線照射手段を該角度θ回転させる段階と、前記ベクトルに基づいて、前記天板の回転角度ψを算出し、前記天板を該角度ψ回転させる段階と、前記角度θ及び前記角度ψに基づいて、前記粒子線の照射方向が前記被検体の照射対象部位を通過するよう前記天板を前記体軸方向に並進移動させる段階と、前記第2支持アームにより前記PET検出器を保持する前記第1支持アームを前記θとほぼ同じ角度で回転させる段階と、前記第1支持アームによる前記PET検出器の回転角度φを算出し、前記第1支持アームにより前記PET検出器を該角度φ回転させる段階と、を有することを特徴とするものである。
【発明の効果】
【0012】
請求項1に記載の粒子線治療装置及び請求項7に記載の粒子線治療装置制御方法は、被検体と粒子線照射手段との間に一部に開口を有する略筒型のPET検出器を配置し、それを支持するアーム部分に2つの回転自由度を備えた構成である。また、粒子線の被検体への照射により発生するγ線をPET検出器で検出することで被検体における粒子線によって破壊された部位を確認することができる構成となっている。これにより、機械的干渉(すなわち、機械同士の衝突)を発生させずに任意の方向から被検体に向けて粒子線を照射できるとともに、PET検出器の視野を最大限に確保することが可能となる。したがって、効果的かつ安全な方向から被検体に向けて粒子線が照射できるとともに、患部に向けて的確な粒子線の照射をおこなうことが可能となる。
【発明を実施するための最良の形態】
【0013】
〔第1の実施形態〕
以下、この発明の第1の実施形態に係る粒子治療装置について図1〜図3を参照して説明する。図1は本発明に係る粒子線治療装置における機能を表すブロック図である。図2(A)は本発明に係る粒子線治療装置を回転ガントリーの回転軸方向から見込んだ模式的な正面図である。図2(B)は本発明に係る粒子線治療装置の模式的な側面図である。図3は本発明に係る粒子線治療装置の模式的な上面図である。
【0014】
図1に示すように、本実施形態に係る粒子線治療装置は、粒子線治療部100、PET部200、表示制御部020、及び入力部011と表示部012を有するユーザインタフェース010を備えている。この粒子線治療装置は、本来は粒子線治療部100から照射される粒子線を被検体の患部に照射し、患部の細胞を破壊することで治療を行う装置である(以下では、粒子線を照射する対象とする患部を「照射対象部位」という)。ただし、粒子線が被検体のどの部分にあたっているかを把握するために補助的にPET部200を有している。すなわち、PET部200を用いて把握される粒子線の照射位置に基づいて、正確に照射対象部位に向けて粒子線の照射を行い効果的な治療を行うことができる。そのため、本実施形態に係る収支線治療装置では、まず粒子線の照射方向を最適な位置に設定するように粒子線照射部103及び天板110を移動させることに主とし、その粒子線の照射を妨げないように、すなわち、粒子線の照射野を妨げないこと、及び接触などの機械的な干渉を起こさないことを目的としてPET検出部201を移動させることになる。ただし、実際には、粒子線照射部103、天板110、及びPET検出部201の移動は連動して行われる。以下では、まず粒子線治療部100について説明し、その後PET部200について説明する。
【0015】
粒子線治療部100は、粒子線発生/加速器101、粒子線伝送部102、粒子線照射部103(照射ノズル)、照射ノズル回転部104(回転ガントリー)、及び照射ノズル回転制御部105から構成されている。
【0016】
粒子線発生/加速器101は、イオン源と、直線加速器、サイクロトロン、シンクロトロンなどの加速器(いずれも図示しない)で構成されている。粒子線発生/加速器101は、イオン源で陽イオン(例えば、水素イオン、ヘリウムイオン、炭素イオン、ネオンイオン等)を発生させる。次に、粒子線発生/加速器101は発生させた陽イオンを加速器で所定のエネルギーまで加速する。具体的には、例えば、発生した陽イオンを直線加速器で加速し、その直線加速器から射出された陽イオンをさらにシンクロトロンなどでさらに加速することで所定のエネルギーまでの加速が行われる。そして、粒子線発生/加速器101は、所定のエネルギーを有する陽イオンを粒子線伝送部102に射出する。
【0017】
粒子線伝送部102は、粒子線発生/加速器101から粒子線照射部103へと繋がるビーム経路(不図示)を有している。粒子線伝送部102は、粒子線発生/加速器101から射出された陽イオンをビーム経路を経由させて粒子線照射部103へと伝送する。
【0018】
粒子線照射部103は、図2(A)に示すように照射ノズル回転部104の一部に設置されている。そして、粒子線照射部103は照射ノズル回転部104の回転とともに被検体の周りを回転可能となっている。粒子線照射部103は、粒子線伝送部102から伝送された陽イオンを被検体に向けて照射する。ただし、実際には粒子線照射部103は常に照射中心(アイソセンター)に向けて粒子線の照射を行う。粒子線照射部103の回転の基準位置を図2(A)のように位置P1に位置している状態とする。すなわち、被検体を真下に見る位置に粒子線照射部103が位置している状態を粒子線照射部103の角度θ=0の状態とする。この粒子線照射部103が本発明における「粒子線照射手段」にあたる。
【0019】
照射ノズル回転部104は、図2(A)に示すように側面から見ると中心軸Sを中心に円形をしているガントリー及び該ガントリーを回転させるモータ(不図示)で構成されている。ここで、図2(B)に示すように図2(A)の中心軸Sは照射中心を通過する軸で、図2(A)の紙面正面から裏面に向けて貫通している軸を表している。また以下の説明では、中心軸Sに直交し照射中心を貫通する平面を平面αとする。照射ノズル回転部104のガントリーは平面α内を回転移動するため平面αは固定平面である。そして、照射ノズル回転部104のガントリーは、図2(B)に示すように中心軸Sに沿う方向に厚みを有した略筒型の形状を有している。さらに、照射ノズル回転部104のガントリーは、中心軸Sを中心に回転を行う。これにより、粒子線照射部103も中心軸Sを中心に回転を行うことになる。本実施形態では、図2(A)における点P1を基準位置として点P1からの粒子線照射部103までの角度を平面αにおける照射角度とする。具体的には、中心軸Sに向けて照射角度θで粒子線を照射する場合には、照射ノズル回転部104のガントリーは照射角度θ分回転することになる。この照射ノズル回転部104が本発明における「照射ノズル回転手段」にあたる。
【0020】
天板110は床に平行で人が寝られる大きさの板状の形状を有している。天板110の上には、粒子線治療を行う対象である被検体(以下では、単に「被検体」と呼ぶ。)を載置する。この被検体が載置されている平面を「載置平面」と呼ぶことにする。天板110は、天板移動部108により載置した被検体の体軸方向またはその直交方向に並進移動が行われる。また、天板110は、天板回転部106により載置平面(天板110と平行な平面)内で回転移動が行われる。
【0021】
天板移動部108は、天板110を被検体の体軸方向またはその直交方向への並進移動を可能とする機構と、該並進移動を可能とする機構を動かすモータを有している。天板移動部108は、自己が有するモータを駆動することで天板110を被検体の体軸方向またはその直交方向に移動させる。具体的には、例えばモータによりギアなどの回転部材を回転させて、ギアとかみ合う水平移動部材が移動することで天板110が並進移動する構成になっている。この天板移動部108が本発明における「天板移動手段」にあたる。
【0022】
天板回転部106は、天板移動部108及び天板110を天板110と平行な平面内で回転可能とするための円盤、該円盤を動かすモータを有している。天板回転部106は、自己が有するモータを駆動することで天板110と平行な平面内で天板110及び天板移動部108をアイソセンターを中心に回転させることができる。すなわち、天板回転部106は、図3で示す矢印Bのように天板110及び天板移動部108を回転移動させる。この天板110と平行な平面でかつ被検体の体軸を含む平面を平面βとする。この天板回転部106が本発明における「天板回転手段」にあたる。
【0023】
PET部200は、図1に示すように、PET検出部201、画像生成部202、第1支持アーム203、第1制御部204、第2支持アーム205、及び第2制御部206から構成されている。
【0024】
PET検出部201は、図2(A)に示すように、照射ノズル回転部104及び粒子線照射部103の内側に天板110及び天板110に載置された被検体を囲むように配置されている。そして、PET検出部201は、図2(B)に示すように中心軸Sに沿う方向に厚みを有し、さらに粒子線照射部103と照射中心との間に粒子線を通過させるための第1の開口部、及び被検体から見て粒子線照射部103と反対側の部分(第1の開口部と反対側の部分)に第2の開口部を有した略筒型の形状を有している。ここで、略筒型の形状とは被検体から一定距離の周囲の一定範囲を覆う形状であればよい。それぞれの開口部は小さいほどよく、後に説明するように粒子線の照射野が通過できる範囲の大きさがあればよい。第1の開口部及び第2の開口部によってPET検出部201の筒型は2つの部分(図2における紙面に対し左右対称のC字型の部分)に分割されている。そして、PET検出部201は、図3に示すように、第2支持アーム205の円弧部分に沿って動くようになっており、第2支持アーム205が水平の場合には第1支持アーム203で天板110と平行な平面βと平行な方向に回転可能に保持される。すなわち、PET検出部201は矢印Cで示すように平面βと平行な方向に回転移動する。さらに、PET検出部201は、図3に示すように、第2支持アーム205で図3における被検体の体軸方向の周りに回転可能に保持されている。すなわち、図3の状態(すなわち、未だいずれの方向にも回転を行っていない状態)ではPET検出部201は矢印Aで示すように平面αと平行な平面内で回転移動する。このPET検出部201が本発明における「PET検出器」にあたる。
【0025】
ここで、本実施形態では、被検体に照射された粒子線のうち被検体を通過した粒子線がPET検出部201あたることで障害が発生したり故障したりすることの回避、及び天板110へのPET検出部201の接触の回避のために第2の開口部を設けている。ただし、粒子線が被検体を通過する量は極めて少ないと考えられるため、PET検出部201に微小の粒子線があたることを許容でき、低い角度(天板110とPET検出部201が接触するような角度)からの粒子線の照射を行わない場合には第2の開口部を有さない構成にしてもよい。この点、PET検出部201の形状をより大きな筒形にすれば天板110との接触が避けられるとも考えられるが、この場合PET検出部201が被検体から離れた位置に配置されることになり、γ線の検出効率が低下するため好ましくない。
【0026】
PET検出部201は、最も一般的な構成では、前述の筒型の部分の内側の全面に多数のシンチレータアレイが配置されている。シンチレータアレイは、γ線を検出するシンチレータ結晶と微弱光パルスを高速かつ高感度に検出する光電子倍増管から構成されている。そして、PET検出部201は、粒子線照射部103から照射された粒子線が被検体の体内にあたることで発生したγ線をシンチレータアレイで検出する。さらに、PET検出部201は、検出したγ線に基づく電気信号を画像生成部202へ出力する。
【0027】
画像生成部202は、PET検出部201から電気信号の入力を受信する。画像生成部202は、受信した電気信号に対し同時計測などの信号処理を行った後、画像処理によりPET画像を生成する。画像生成部202は生成したPET画像を表示制御部020へ出力する。この画像生成部202が本発明における「画像生成手段」にあたる。
【0028】
表示制御部020は、画像生成部202から入力されたPET画像をユーザインタフェース010の表示部012に表示させる。この様に、被検体に粒子線が当たった際に放出されるγ線の発生した位置を表したPET画像が表示部012に表示されることで、操作者は被検体における粒子線があたった位置を把握することができ、その画像を基に粒子線の照射位置を調整できる。これにより、より正確に照射対象部位に粒子線の照射を行うことが可能となる。
【0029】
第1支持アーム203は、本実施形態では図3に示すように天板110と逆方向から被検体を見下ろした状態でC字型の形状をしている。さらに、第1支持アーム203は該C字型の部材を回転させるためのモータを有している。そして、第1支持アーム203のC字型の部材の両端にはPET検出部201の2分割された筒型の各部分がそれぞれ固定されている。第1支持アーム203は矢印Cの方向にPET検出部201を保持した状態でモータを駆動させることで、PET検出部201の2つの開口部を通過する軸を中心にPET検出部201を回転させる。例えば、第1支持アーム203が図3の状態からモータによりC字型の部材を角度φ回転することで、PET検出部201は平面βと平行な方向に粒子線の放射方向の軸を中心に角度φ回転する。ここで、本実施形態では第1支持アーム203はC字型としたが、これはPET検出部201の2つの部材を向き合う形で固定できる形状で回転可能な形状あれば他の形状でもよい。
【0030】
第2支持アーム205は、図3に示すように第1支持アーム203を保持することでPET検出部201を保持する保持部材と、該保持部材を回転させるモータで構成されている。第2支持アーム205は、第1支持アーム203及びPET検出部201を被検体の体軸方向の周りに回転可能となるように保持している。第2支持アーム205はモータを駆動することで保持部材を回転させ、それにより第1支持アーム203を矢印Aの方向に回転させる。そして、第2支持アーム205に保持された第1支持アーム203が被検体の体軸方向の周りに回転することで、第1支持アーム203に保持されたPET検出部201が被検体の体軸方向の周りに回転移動を行うことになる。例えば、図3に示されている初期の状態では、第1支持アーム203によるPET検出部201の回転が行われていないため、PET検出部201と照射ノズル回転部104とは同じ回転平面を有する。すなわち、第2支持アーム205が角度θ回転することより、PET検出部201は平面α内を図3における被検体の体軸を中心に角度θ回転する。
【0031】
本実施形態に係る粒子線治療装置では、治療計画に含まれる粒子線の照射方向に基づいて、適切な方向から粒子線の照射が行えるように、操作者が粒子線照射部103、天板110、及びPET検出部201を手動で各部材が接触しないように移動させる。すなわち、操作者は、粒子線照射部103の回転及び天板110の回転/並進移動を調整することにより粒子線の適切な照射方向を決定し、さらに、その粒子線の照射野をPET検出部201が遮らないように、且つPET検出部201の開口部を照射方向の中心軸が通過するようにPET検出部201を移動させる。これにより、適切な方向からの被検体への粒子線の照射と、その時に発生するγ線の検出及びPET画像の生成並びに表示を行うことが可能となる。
【0032】
次に、図4を参照して本実施形態に係る粒子線治療装置の粒子線照射及びPET画像の作成の流れを説明する。図4は本実施形態に係る粒子線治療装置の粒子線照射及びPET画像の作成のフローチャート図である。
【0033】
ステップS001:操作者は、粒子線の照射の方向の条件を含む治療計画を作成する。
【0034】
ステップS002:操作者は、治療計画における粒子線の照射の方向の条件を基に、粒子線照射部103、天板110、PET検出部201を移動させる。
【0035】
ステップS003:粒子線照射部103は、粒子線を被検体の照射対象部位に向けて照射する。
【0036】
ステップS004:PET検出部201は、粒子線が照射され被検体で発生したγ線をシンチレータアレイで検出し、検出したγ線に基づく電気信号を同時計測などの信号処理を行った後、画像生成部202に送信する。
【0037】
ステップS005:画像生成部202は、PET検出部201より入力された電気信号を処理しPET画像を生成して表示制御部020に送信する。
【0038】
ステップS006:表示制御部020は、画像生成部202から入力されたPET画像を表示部012に表示させる。
【0039】
以上で説明したように、本実施形態に係る粒子線治療装置は、任意の方向に開口部を向けることができる被検体の周囲のほぼ全域を囲うPET検出部を備えた構成である。これにより、PET検出部に遮られることなく任意の方向から粒子線を被検体に向けて照射できるとともに、PET装置の視野を最大限にして精度よくγ線の検出を行うことが可能となる。したがって、本実施形態に係る粒子線治療装置は、粒子線治療の効果の向上に利用することができる。
【0040】
〔第2の実施形態〕
以下、この発明の第2の実施形態に係る粒子治療装置について図1〜図6を参照して説明する。本実施形態にかかる粒子線治療装置は、入力された粒子線の照射の方向の条件に基づいて、粒子線照射部(照射ノズル)、天板、PET検出部を自動的に移動させる構成であることが第1の実施形態と異なるものである。本実施形態に係る粒子線治療装置の機能ブロック図は第1の実施形態に係る図1の機能ブロック図に点線で示す機能部を加えた構成である。図5は本実施形態に係る粒子線治療装置における、入力された照射条件に基づく、天板、粒子線照射部、及びPET検出部の回転移動を説明するための図である。図6は、回転移動の角度を算出するため、図5を局所直交座標系で表わした図である。以下の説明では、第1の実施形態と同じ符号を有する機能部は、特に説明のない限り同じ機能を有するものとする。
【0041】
図1の点線で示すように、本実施形態に係る粒子線治療装置は、照射ノズル回転部104による粒子線照射部の回転を制御する照射ノズル回転制御部105、天板回転部106による天板110の回転を制御する天板回転制御部107、天板移動部108による天板110の並進移動を制御する天板移動制御部109、第1支持アーム203によるPET検出部201の回転を制御する第1制御部204、及び第2支持アーム205によるPET検出部201の回転を制御する第2制御部206を有する。
【0042】
粒子線発生/加速器101で発生・加速された陽イオンは、粒子線伝送部102に射出される。 粒子線伝送部102は、陽イオンをビーム経路を経て粒子線照射部103へと伝送する。粒子線照射部103は被検体に向けてこの荷電粒子を照射する。
【0043】
粒子線照射部103及び照射ノズル回転部104の構造は図2(A)及び図2(B)で示す第1の実施形態と同様である。照射ノズル回転部104は、アイソセンター(回転軸S上にある)に向けて照射角度θで粒子線を照射する場合には、粒子線照射部103を照射角度θ回転させる。
【0044】
照射ノズル回転制御部105は、CPU及びエンコーダを有している。該エンコーダは照射ノズル回転部104のガントリーの回転移動した量を求めるためのエンコーダである。照射ノズル回転制御部105は入力部011から入力された照射方向の条件に基づいて、粒子線照射部103の回転を制御する。具体的には、照射ノズル回転制御部105は、入力部011から入力された照射条件を基に照射ノズル回転部104を回転させる角度θを算出する。この入力された照射条件に基づく照射ノズル回転部104の回転角度θの算出方法は後で詳細に説明する。次に、照射ノズル回転制御部105は、照射ノズル回転部104に回転の命令を送信し照射ノズル回転部104の回転を開始させる。そして、照射ノズル回転制御部105は、自己が有するエンコーダを用いて照射ノズル回転部104の回転した量を取得し、該角度が算出した角度θに達したときに照射ノズル回転部104に対し停止命令を送信し照射ノズル回転部104の回転を停止させる。ここで、照射ノズル回転制御部105は本発明に係る「照射ノズル回転制御手段」にあたる。
【0045】
天板110、天板移動部108、及び天板回転部106の構造は第1の実施形態と同様である。
【0046】
天板移動制御部109は、CPU及びエンコーダを有している。該エンコーダは天板110の並進移動した距離を求めるためのエンコーダである。例えばモータによりギアなどの回転部材を回転させ、ギアとかみ合う並進移動部材を移動させることで天板110が並進移動する構成では、エンコーダが回転部材の回転量を取得することで天板110の並進移動した距離を求めることができる。天板移動制御部109は、入力部から入力された照射条件を基に天板110を体軸方向に並進移動させるそれぞれの距離Lを算出する。この距離Lが並進移動させる目標とする距離となる。この入力された照射条件に基づく天板110の並進移動距離Lの算出方法は後で詳細に説明する。次に、天板移動制御部109は、天板移動部108に天板110の並進移動の命令を送信してモータの駆動を開始させ、天板110の並進移動を開始させる。そして、天板移動制御部109は、自己が有するエンコーダを用いて天板移動部108が有する回転部材の回転量を取得し、その回転量から天板110の並進移動した距離を算出する。そして、天板移動制御部109は、天板110の並進移動した距離が目標とする並進移動距離Lに達したときに天板移動部108に対し停止命令を送信して天板移動部108のモータを停止させ、天板110の並進移動を停止させる。ここで、天板移動制御部109は本発明に係る「天板移動制御手段」にあたる。
【0047】
天板回転制御部107は、CPU及びエンコーダを有している。該エンコーダは天板110と平行な平面β内での天板110の回転量を求めるためのエンコーダである。天板回転制御部107は、入力部011から入力された照射条件に基づいて天板110と平行な平面βでの天板110の回転させる回転角度ψを算出する。この入力された照射条件に基づく天板110の回転角度ψの算出方法は後で詳細に説明する。次に、天板回転制御部107は、天板回転部106に天板110の回転の命令を送信してモータの駆動を開始させ、平面βと平行な面内で天板110の回転を開始させる。そして、天板回転部106は、自己が有するエンコーダを用いて天板回転部106の回転した回転量を取得する。そして、天板回転制御部107は、天板110の回転量が目標とする回転角度ψに達したときに天板回転部106に対し停止命令を送信して天板回転部106のモータを停止させ、天板110の回転を停止させる。ここで、天板回転制御部107は本発明に係る「天板回転制御手段」にあたる。
【0048】
PET検出部201、第1支持アーム203、及び第2支持アーム205は、図3に示す第1の実施形態と同様の構造を有している。
【0049】
本実施形態に係るPET検出部201も被検体の周りを囲うように配置され、且つ2分割された略筒型をしている。PET検出部201は第1支持アーム203に取り付けられ、第1支持アーム203は矢印Cで示すように第2支持アーム205の円弧部分に沿って(平面βと平行な方向)に回転移動する。さらに、第2支持アーム205は、図3に示されている矢印Aの方向(平面αと平行な方向)に回転移動する。
【0050】
第1支持アーム203は、PET検出部201の2つの開口部を通過する軸の周りにPET検出部201の回転移動を行う。例えば、第1支持アーム203が図3の状態からモータによりC字型の部材を角度φ回転することで、PET検出部201は粒子線の放射方向の軸の周りに角度φだけ回転する。
【0051】
第1制御部204は、CPU及び図3に示すエンコーダ301を備えている。エンコーダ301は第1支持アーム203のC字型の部材が回転した回転量を検出する。第1制御部204は、入力部011から入力された照射方向の条件を基に、第1支持アーム203のC字型の部材を回転させる角度φを算出する。次に、第1制御部204は第1支持アーム203に対し回転の命令を送信してモータの駆動を開始させ、第1支持アーム203のC字型の部材の回転を開始させる。そして、第1制御部204は、自己が有するエンコーダ301を用いて第1支持アーム203のC字型の部材が回転した回転量を取得する。そして、第1制御部204は、第1支持アーム203の回転した回転量が目標とする回転角度φに達したときに第1支持アーム203に対し停止命令を送信して第1支持アーム203のモータを停止させ、第1支持アーム203のC字型の部材の回転を停止させる。このとき、第1支持アーム203が回転することで第1支持アーム203に固定されたPET検出部201も同様の回転移動を行う。ここで、第1制御部204は本発明に係る「第1制御手段」にあたる。
【0052】
第2支持アーム205は、PET検出部201を搭載した第1支持アーム203を照射ノズル回転部104(回転ガントリー)の回転軸の周りに回転させる。例えば、図3の状態では第2支持アーム205が角度θ回転することより、PET検出部201は平面α内を図3における被検体の体軸の周りに角度θ回転することになる。
【0053】
第2制御部206は、CPU及び図3に示すエンコーダ302を備えている。エンコーダ302は第2支持アーム205の保持部材が回転した回転量を検出する。第2制御部206は、入力部011から入力された照射方向の条件に基づいて、第2支持アーム205の保持部材を回転させる角度θを算出する。次に、第2制御部206は第2支持アーム205に対し回転の命令を送信してモータの駆動を開始させ、第2支持アーム205のC字型の部材の回転を開始させる。そして、第2制御部206は、自己が有するエンコーダ302を用いて第2支持アーム205の保持部材が回転した回転量を取得する。そして、第2制御部206は、第2支持アーム205の回転した回転量が目標とする回転角度θに達したときに第2支持アーム205に対し停止命令を送信して第2支持アーム205のモータを停止させ、第2支持アーム205の保持部材の回転を停止させる。このとき、第2支持アーム205の保持部材が回転することで第1支持アーム203のC字型の部材が回転し、さらに第1支持アーム203のC字型の部材に固定されたPET検出部201も同様の回転移動を行う。ここで、第2制御部206は本発明に係る「第2制御手段」にあたる。
【0054】
また、以上の照射ノズル回転制御部105、天板回転制御部107、天板移動制御部109、第1制御部204、及び第2制御部206を合わせたものが本発明における「制御手段」にあたる。
【0055】
(各部材の回転角度の算出方法)
次に、図5及び図6を参照して、治療計画に基づく、照射ノズル回転部104による粒子線照射部103の回転角度θ、天板回転部106による天板110の回転角度ψ、第1支持アーム203によるPET検出部201の回転角度φ、及び第2支持アーム205によるPET検出部201の回転角度ηを算出する方法を詳細に説明する。図5は被検体への粒子線の照射方向を表すベクトルを表した図である。ここで、図5の座標系は被検体が寝ている平面βをXY平面とし、粒子線照射部103及び照射ノズル回転部104が動く平面αをYZ平面にした直交座標空間である。この図5の直交座標系を0−XYZと呼ぶことにする。
【0056】
操作者は、予めX線診断装置などで撮像した被検体の患部の画像を基に、その患部を粒子線の照射対象部位とする治療計画を立てる。この治療計画には、粒子線の照射侵入位置及び方向の条件、粒子線の照射量などが含まれる。そして、操作者は、粒子線の照射方向をベクトルとして入力する。この入力は、操作者が、ユーザインタフェース010に表示された被検体の照射対象部位が原点に配置された三次元座標空間を参照し、その照射対象部位、すなわち原点に向けて照射したい始点を指定することで、その座標の原点から指定された始点へのベクトルが指定され、そのベクトルが照射方向の条件として入力される。ここで、ベクトルとはあくまでも方向を表すだけの意味で用いており、その大きさは問題にはしない。そこで、ここでは、便宜上入力されるベクトルは大きさ1の単位ベクトルとする。以下、このベクトルをenとする。enは単位ベクトルであるので|en|=1となっている。
【0057】
ここで、操作者にとって照射方向は照射対象の中心を通り且つ体軸を基準とした直交座標系で表すことがわかりやすいことから、被検体の体軸が一つの軸と一致する局所直交座標系を考える。そこで、この局所直交座標系のそれぞれの軸をX’Y’Z’軸とし、0’−X’Y’Z’の座標系とする。そして、X’軸、Y’軸、Z’軸方向の単位ベクトルをそれぞれ、e1’、e2’、e3’とおく。被検体を載置した天板110は水平に保たれたまま、平行移動や回転移動が行われるため、Z軸とZ’軸は同じ方向を向いているものとする。すなわち、e3’=e3である。そして、入力された粒子線の照射の条件であるenは0’−X’Y’Z’の座標系ではen’で表わされるものとする。この局所直交座標系における模式図が図6である。
【0058】
まず、照射ノズル回転部104による粒子線照射部103の回転量θを算出する。図5における粒子線照射部103が回転する0−XYZにおけるYZ平面は、図6で示されるen’とe3’が張る平面Σに対応している必要がある。そのため、en’とe3’がなす角度がθになる。したがって、粒子線照射部103の回転角度、すなわち、照射ノズル回転部104の回転角度θは、
cosθ=(en’・e3’)/|en’|・|e3’|=(en’・e3’)
と表わされる。
(ここで、(A・B)は、ベクトルAとベクトルBとの内積を表す。また、(A×B)はベクトルAとベクトルBとの外積を表す。以下同じ。)
したがって、
θ=cos−1((en’・e3’))
と求められる。
【0059】
次に、天板回転部106による天板110の回転量ψを算出する。図5に示されるように、天板回転部106の回転角度ψは、en’のX’Y’平面の正射影成分en(XY)’と、e1’とがなす角度となることから、
cosψ=[{en’−(en’・e3’)e3’}・e1’]/|en’−(en’・e3’)e3’|・|e1’|=[{en’−(en’・e3’)e3’}・e1’]/|en’−(en’・e3’)e3’|
したがって、
ψ=cos−1[{en’−(en’・e3’)e3’}・e1’]/|en’−(en’・e3’)e3’|
と求められる。
【0060】
ここで、被検体の体軸方向の単位ベクトルe1’(X’軸方向の単位ベクトル)は、直交座標系0−XYZ上における被検体の体軸方向の単位ベクトルepに対応する。したがって、先に求めた天板回転部106による天板110の回転量ψを用いて表すと、
ep=(sinψ,−cosψ,0)
と表わされる。
【0061】
また、直交座標系0−XYZ上における粒子線の照射の方向の中心軸の単位ベクトルenを先に求めた照射ノズル回転部104による粒子線照射部103の回転量θを用いて表すと、
en=(0,−sinθ,cosθ)
と表わされる。
【0062】
次に、PET検出部201を回転移動させる第1支持アーム203の回転角度φ、及び第2支持アーム205の回転角度ηを算出する。ここで、本実施形態では図3の状態(第1支持アーム203及び第2支持アーム205の何れも回転を行っていない状態)から、先ず第2支持アーム205によりPET検出部201を平面α内で回転させ、粒子線照射部103から粒子線の照射方向の中心軸がPET検出部201の開口部を通過するように回転角度ηを求め、次に、回転角ηの第2支持アーム205による回転を行った状態を想定し、その状態で第1支持アーム203を粒子線照射部103から粒子線の照射方向の中心軸の周りに回転させて、PET検出部201が天板110に直交する角度になるように回転角度φを求める。ここで、PET検出部201を天板110に直交する角度にする理由は、PET検出部201を含む平面Π(以下、単に「平面Π」という)が粒子線の照射方向の単位ベクトルenと被検体の体軸方向の単位ベクトルepが張る平面と直交していれば、PET検出部201と被検体を載置した天板110との干渉が防止できるからである。
【0063】
そこで、第2支持アーム205によるPET検出部201の回転角度ηを考える。粒子線照射部103は先に求めた回転量θの回転を行っている。そして、図3の状態ではPET検出部201は照射ノズル回転部104と同じ平面αに位置している。したがって、PET検出部201は平面α内を回転量θ分移動することで、PET検出部201の開口部が粒子線照射部103からの粒子線の照射方向に一致することになる。すなわち、回転量θの回転を行うことで粒子線の照射方向の中心軸は開口部を通過するようになる。したがって、理想的には第2支持アーム205の回転角度ηは照射ノズル回転部104による粒子線照射部103の回転角度θと一致すればよい。すなわち、η=θとなる。
【0064】
ここで、上記の制御では、第2支持アーム205によるPET検出部201の回転角度ηと照射ノズル回転部104による粒子線照射部103の回転角度θを一致させていたが、実用上は正確に一致する必要はなく、粒子線の照射野がPET検出部201の開口部を通過する位置ならば多少のずれは許容される。PET検出部201と天板110が機械的に干渉しなければ、例えば±10度のずれが許容されるといったこともありうる。
【0065】
次に、第2支持アーム205によってPET検出部201が平面α内を回転角度θ回転させられた状態での、第1支持アーム203によるPET検出部201の粒子線の照射方向の中心軸周りの回転角度φを求める。図3の状態から第2支持アーム205によってPET検出部201が平面α内で角度θ回転させられた状態を第1支持アーム203の回転の基準、すなわちφ=0と決める。そしてφ=0の場合、平面Πと平面α(YZ平面)は一致しており、平面Πの法線はX軸と平行になる。このとき、「enとepの外積」と「X軸(=e1)」のなす角度がφになる。ここで、enとepは、前述したようにすでに求められていることに注意されたい。
そこで、
cosφ=(en×ep)・e1/|en×ep|・|e1|=(en×ep)・e1/|en×ep|
が成り立ち、
φ=cos−1{cosθ・cosψ/(1−sin2θ・cos2ψ)1/2}
としてφが求められる。
【0066】
ここで、特殊なケースとして、上述のφの分母が0になる場合、すなわちθ=π/2(rad)で且つθ=0(rad)の場合は、上述のφは不定になってしまう。この場合、便宜的にφ=0(rad)(X軸が平面Πに含まれている状態、すなわち被検体の左右にPET検出部201が配置された状態)、又はφ=π/2(rad)(X軸が平面Πと直交している場合、すなわち被検体の腹部と背面にPET検出部201が配置された状態)に第1支持アーム203の制御を行うように決めておけばよい。
【0067】
そして、算出した回転角度を基に、それぞれの部材の回転を実行することで被検体の体軸の方向は入力された照射方向の条件に適合するように移動される。そこで、最後に天板移動部108は、体軸が適切に移動させられた状態での天板の位置に載置した被検体の照射対象部位を照射方向の中心軸が通過するように天板を並進移動させる距離Lを求める。
【0068】
以上のように、被検体の体軸方向と粒子線照射部103からの粒子線の照射方向が決定されると、照射ノズル回転部104による粒子線照射部103の回転角度θ、天板回転部106による天板110の回転角度ψ、第1支持アーム203によるPET検出部201の回転角度φ、及び第2支持アーム205によるPET検出部201の回転角度ηを一意的に決定できる。この求めた回転角度により照射ノズル回転部104、天板回転部106、第1支持アーム203、及び第2支持アーム205をそれぞれ制御することで、被検体に対し適切な方向から粒子線の照射の方向の中心軸がPET検出部201の開口部を通過するように、粒子線の照射を行うことができ、また、天板110及びPET検出部201が接触するなどの機械的な干渉を防止することが可能となる。以上では、説明の都合上それぞれの回転角度の算出を順番に説明したが、それぞれの角度の算出の順番はどのような順序でもよい。また、それぞれの部材の回転移動の順番はどのような順序でもよく、本実施形態における制御はそれぞれの回転角度を求めた後に、その回転角度を基に照射ノズル回転部104、天板回転部106、第1支持アーム203、及び第2支持アーム205による粒子線照射部103、天板110、及びPET検出部201の回転移動をそれぞれが接触しないように連動して行うものである。
【0069】
次に、図7を参照して本実施形態に係る粒子線治療装置の粒子線照射及びPET画像の作成の流れを説明する。図7は本実施形態に係る粒子線治療装置の粒子線照射及びPET画像の作成のフローチャート図である。
【0070】
ステップS101:操作者は、ユーザインタフェース010を用いて粒子線の照射の方向の条件を入力する。
【0071】
ステップS102:入力された照射の方向の条件を基に、照射ノズル回転制御部105、天板回転制御部107、第1制御部203、及び第2制御部206はそれぞれ、照射ノズル回転部104による粒子線照射部103の回転角度θ、天板回転部106による天板110の回転角度ψ、第1支持アーム203によるPET検出部201の回転角度φ、及び第2支持アーム205によるPET検出部201の回転角度ηを算出する。
【0072】
ステップS103:算出した回転角度を基に、照射ノズル回転制御部105は照射ノズル回転部104を制御して粒子線照射部103を回転させ、天板回転制御部107は天板回転部106を制御して天板110を回転させ、第1制御部204は第1支持アーム203を制御してPET検出部201を回転させ、第2制御部206は第2支持アーム205を制御してPET検出部201を回転させる。
【0073】
ステップS104:天板移動制御部109は、入力された照射の方向の条件に基づいて並進移動する距離Lを求め、天板110を距離Lだけ並進移動させる。
【0074】
ステップS105:粒子線照射部103は、粒子線を被検体の照射対象部位に向けて照射する。
【0075】
ステップS106:PET検出部201は、粒子線が照射され被検体で発生したγ線をシンチレータアレイで検出し、検出したγ線に基づく電気信号を同時計測などの信号処理を行った後、画像生成部202に送信する。
【0076】
ステップS107:画像生成部202は、PET検出部201より入力された電気信号を処理しPET画像を生成して表示制御部020に送信する。
【0077】
ステップS108:表示制御部020は、画像生成部202から入力されたPET画像を表示部012に表示させる。
【0078】
以上で説明したように、本実施形態に係る粒子線治療装置は、粒子線の照射の方向の条件を入力することで、その照射の方向の条件に対応した位置に粒子線照射部、天板、及びPET検出部を相互に機械的な干渉を起こさないように、自動的に移動させる構成となっている。これにより、操作者による各部の移動の負荷を軽減できるとともに、被検体の照射対象部位への任意の角度からの正確で効果的な粒子線の照射を行うことが可能となる。また、PET検出部の視野を最大限にしてγ線の検出の精度を向上させることができる。さらに、各部材同士が接触して破壊されるといった事故も防止可能である。
【図面の簡単な説明】
【0079】
【図1】本発明に係る粒子線治療装置のブロック図
【図2】(A)本発明に係る粒子線治療装置の模式的な正面図、(B)本発明に係る粒子線治療装置の模式的な側面図
【図3】本発明に係る粒子線治療装置の模式的な上面図
【図4】第1の実施形態に係る粒子線治療装置の粒子線照射及びPET画像の作成のフローチャート図
【図5】本実施形態に係る粒子線治療装置における入力された照射条件に基づく天板、粒子線照射部、及びPET検出部の回転移動を説明するための図
【図6】回転移動の角度を算出するため、図5を局所直交座標系で表した図
【図7】第2の実施形態に係る粒子線治療装置の粒子線照射、及びPET画像の作成のフローチャートの図
【符号の説明】
【0080】
010 ユーザインタフェース
011 入力部
012 表示部
020 表示制御部
100 粒子線治療部
101 粒子線発生/加速器
102 粒子線伝送部
103 粒子線照射部
104 照射ノズル回転部
105 照射ノズル回転制御部
106 天板回転部
107 天板回転制御部
108 天板移動部
109 天板移動制御部
200 PET部
201 PET検出部
202 画像生成部
203 第1支持アーム
204 第1制御部
205 第2支持アーム
206 第2制御部
【特許請求の範囲】
【請求項1】
被検体を載置する天板と、
前記天板を載置平面内で回転させる天板回転手段と、
前記天板を前記被検体の体軸方向に並進移動させる天板移動手段と、
前記天板に載置された前記被検体に向けて粒子線を照射する粒子線照射手段と、
前記粒子線照射手段を前記載置平面と直交する特定の平面内で被検体の周りを回転移動させる照射ノズル回転手段と、
前記粒子線照射手段と前記被検体との間に、略筒型の形状で該筒内に前記被検体を囲うように配置され、かつ粒子線照射手段からの前記粒子線を通過させる開口を有し、前記粒子線が前記被検体に照射されたときに発生するγ線を検出するPET検出器と、
前記PET検出器を前記粒子線の照射方向の軸の周りに回転可能に保持する第1支持アームと、
前記第1支持アームを前記体軸の周囲に回転可能に保持する第2支持アームと、
前記PET検出器で検出されたγ線を基に画像を生成する画像生成手段と、
を備えたことを特徴とする粒子線治療装置。
【請求項2】
前記PET検出器は、前記開口と反対の方向にさらに開口を有することを特徴とする請求項1に記載の粒子線治療装置。
【請求項3】
前記被検体への前記粒子線の照射方向の条件の入力を受けて、前記入力された照射方向から粒子線が被検体に向けて照射されるように前記天板及び前記粒子線照射手段を制御し、前記粒子線の照射野が前記PET検出器の前記開口を通過するように制御する制御手段をさらに備えたことを特徴とする請求項1又は請求項2に記載の粒子線治療装置。
【請求項4】
前記制御手段は、
前記天板の回転を制御する天板回転制御手段と、
前記天板の並進移動を制御する天板移動制御手段と、
前記粒子線照射手段の回転移動を制御する照射ノズル回転制御手段と、
前記照射方向の軸を含む平面と直交する方向の前記PET検出器の回転を制御する第1制御手段と、
前記載置平面と直交する方向の前記第1アームの回転を制御する第2制御手段と、
を備え、
前記被検体への前記粒子線の照射方向の条件の入力を受けて、
前記天板回転制御手段、前記天板移動制御手段、及び前記照射ノズル回転制御手段は、入力された照射方向から粒子線が被検体に向けて照射されるようにそれぞれ、前記天板及び前記粒子線照射手段を制御し、
前記第1制御手段及び前記第2制御手段は、前記粒子線の照射野が前記PET検出器の前記開口を通過するように制御する、
ことを特徴とする請求項3に記載の粒子線治療装置。
【請求項5】
前記入力される照射方向の条件は、前記粒子線照射手段の回転の角度にかかわらず照射された粒子線が常に通過する点である照射中心を原点とする座標空間に対するベクトル情報として表され、
前記照射ノズル回転制御手段は、前記ベクトルに基づいて前記粒子線照射手段の回転角度θを算出し、前記照射ノズル移動手段により前記粒子線照射手段を該角度θ回転させ、
前記天板回転制御手段は、前記ベクトルを基に前記天板の回転角度ψを算出し、前記天板回転手段により前記天板を該角度ψ回転させ、
前記天板移動制御手段は前記角度θ及び前記角度ψに基づいて前記粒子線の照射方向が前記被検体の照射対象部位を通過するように、前記天板移動手段により前記天板を並進移動させ、
前記第1制御手段は前記ベクトルを基に前記PET検出器の回転角度φを算出し、前記第1支持アームにより前記PET検出器を該角度φ回転させ、
前記第2制御手段は、前記第2支持アームにより前記第1支持アームを前記θとほぼ同じ角度回転させる、
ことを特徴とする請求項4に記載の粒子線治療装置。
【請求項6】
前記座標空間のX軸を前記照射ノズル回転手段の回転軸と一致させ、前記天板と平行な水平面内で該X軸に直交する軸をY軸とし、該X軸及び該Y軸の双方に直交する鉛直方向をZ軸とし、さらに、該X軸、該Y軸、及び該Z軸の各単位ベクトルをそれぞれe1、e2、e3とし、前記入力された照射方向を表すベクトルをenとする。
また、前記被検体の体軸が一つの軸と一致する座標系でかつ、各座標軸が前記被検体の体軸方向をX’軸、該X’軸に直交する軸をY’軸、及び鉛直方向をZ’軸であり、さらに該座標系の原点0’を前記照射中心とする局所直交座標系において、該X’軸 、該Y’軸、 及び該Z’軸方向の各単位ベクトルをそれぞれe1’、e2’、e3’とする。さらに前記照射方向の前記局所直交座標系における単位ベクトルをen’とする。
このとき、
前記θはθ=cos−1(en’・e3’)
前記ψはψ=cos−1[{en’―(en’・e3’)e3’}・en’/|en’―(en’・e3’)e3’|]
前記φはφ=cos−1{cosθ・cosψ/(1−sin2θ・cos2ψ)1/2}
(ここで(en’・e3’)は内積を表す)
と表わされることを特徴とする請求項5に記載の粒子線治療装置。
【請求項7】
被検体を載置する天板と、
前記天板を載置平面内で回転させる天板回転手段と、
前記天板を前記被検体の体軸方向に並進移動させる天板移動手段と、
前記天板に載置された前記被検体に向けて粒子線を照射する粒子線照射手段と、
前記粒子線照射手段を前記載置平面と直交する特定の平面内で被検体の周りを回転移動させる照射ノズル回転手段と、
前記粒子線照射手段と前記被検体との間に、略筒型の形状で該筒内に前記被検体を囲うように配置され、かつ粒子線照射手段からの前記粒子線を通過させる開口を有し、前記粒子線が前記被検体に照射されたときに発生するγ線を検出するPET検出器と、
前記PET検出器を前記粒子線の照射方向の軸に回転可能に保持する第1支持アームと、
前記第1支持アームを体軸の周囲に回転可能に保持する第2支持アームと、
前記PET検出器で検出されたγ線を基に画像を生成する画像生成手段と、
を備えた粒子線治療装置を制御する粒子線治療装置制御方法であって、
前記粒子線照射手段の回転の角度にかかわらず照射された粒子線が常に通過する点である照射中心を原点とする座標空間のベクトルで表される前記被検体への粒子線の照射方向の条件を入力として受ける段階と、
前記ベクトルを基に、前記粒子線照射手段の回転角度θを算出し、前記粒子線照射手段を該角度θ回転させる段階と、
前記ベクトルを基に、前記天板の回転角度ψを算出し、前記天板を該角度ψ回転させる段階と、
前記角度θ及び前記角度ψを基に、前記粒子線の照射方向が前記被検体の照射対象部位を通過するよう前記天板を前記体軸方向に並進移動させる段階と、
前記第2支持アームにより前記PET検出器を保持する前記第1支持アームを前記θとほぼ同じ角度で回転させる段階と、
前記第1支持アームによる前記PET検出器の回転角度φを算出し、前記第1支持アームにより前記PET検出器を該角度φ回転させる段階と、
を有することを特徴とする粒子線治療装置制御方法。
【請求項1】
被検体を載置する天板と、
前記天板を載置平面内で回転させる天板回転手段と、
前記天板を前記被検体の体軸方向に並進移動させる天板移動手段と、
前記天板に載置された前記被検体に向けて粒子線を照射する粒子線照射手段と、
前記粒子線照射手段を前記載置平面と直交する特定の平面内で被検体の周りを回転移動させる照射ノズル回転手段と、
前記粒子線照射手段と前記被検体との間に、略筒型の形状で該筒内に前記被検体を囲うように配置され、かつ粒子線照射手段からの前記粒子線を通過させる開口を有し、前記粒子線が前記被検体に照射されたときに発生するγ線を検出するPET検出器と、
前記PET検出器を前記粒子線の照射方向の軸の周りに回転可能に保持する第1支持アームと、
前記第1支持アームを前記体軸の周囲に回転可能に保持する第2支持アームと、
前記PET検出器で検出されたγ線を基に画像を生成する画像生成手段と、
を備えたことを特徴とする粒子線治療装置。
【請求項2】
前記PET検出器は、前記開口と反対の方向にさらに開口を有することを特徴とする請求項1に記載の粒子線治療装置。
【請求項3】
前記被検体への前記粒子線の照射方向の条件の入力を受けて、前記入力された照射方向から粒子線が被検体に向けて照射されるように前記天板及び前記粒子線照射手段を制御し、前記粒子線の照射野が前記PET検出器の前記開口を通過するように制御する制御手段をさらに備えたことを特徴とする請求項1又は請求項2に記載の粒子線治療装置。
【請求項4】
前記制御手段は、
前記天板の回転を制御する天板回転制御手段と、
前記天板の並進移動を制御する天板移動制御手段と、
前記粒子線照射手段の回転移動を制御する照射ノズル回転制御手段と、
前記照射方向の軸を含む平面と直交する方向の前記PET検出器の回転を制御する第1制御手段と、
前記載置平面と直交する方向の前記第1アームの回転を制御する第2制御手段と、
を備え、
前記被検体への前記粒子線の照射方向の条件の入力を受けて、
前記天板回転制御手段、前記天板移動制御手段、及び前記照射ノズル回転制御手段は、入力された照射方向から粒子線が被検体に向けて照射されるようにそれぞれ、前記天板及び前記粒子線照射手段を制御し、
前記第1制御手段及び前記第2制御手段は、前記粒子線の照射野が前記PET検出器の前記開口を通過するように制御する、
ことを特徴とする請求項3に記載の粒子線治療装置。
【請求項5】
前記入力される照射方向の条件は、前記粒子線照射手段の回転の角度にかかわらず照射された粒子線が常に通過する点である照射中心を原点とする座標空間に対するベクトル情報として表され、
前記照射ノズル回転制御手段は、前記ベクトルに基づいて前記粒子線照射手段の回転角度θを算出し、前記照射ノズル移動手段により前記粒子線照射手段を該角度θ回転させ、
前記天板回転制御手段は、前記ベクトルを基に前記天板の回転角度ψを算出し、前記天板回転手段により前記天板を該角度ψ回転させ、
前記天板移動制御手段は前記角度θ及び前記角度ψに基づいて前記粒子線の照射方向が前記被検体の照射対象部位を通過するように、前記天板移動手段により前記天板を並進移動させ、
前記第1制御手段は前記ベクトルを基に前記PET検出器の回転角度φを算出し、前記第1支持アームにより前記PET検出器を該角度φ回転させ、
前記第2制御手段は、前記第2支持アームにより前記第1支持アームを前記θとほぼ同じ角度回転させる、
ことを特徴とする請求項4に記載の粒子線治療装置。
【請求項6】
前記座標空間のX軸を前記照射ノズル回転手段の回転軸と一致させ、前記天板と平行な水平面内で該X軸に直交する軸をY軸とし、該X軸及び該Y軸の双方に直交する鉛直方向をZ軸とし、さらに、該X軸、該Y軸、及び該Z軸の各単位ベクトルをそれぞれe1、e2、e3とし、前記入力された照射方向を表すベクトルをenとする。
また、前記被検体の体軸が一つの軸と一致する座標系でかつ、各座標軸が前記被検体の体軸方向をX’軸、該X’軸に直交する軸をY’軸、及び鉛直方向をZ’軸であり、さらに該座標系の原点0’を前記照射中心とする局所直交座標系において、該X’軸 、該Y’軸、 及び該Z’軸方向の各単位ベクトルをそれぞれe1’、e2’、e3’とする。さらに前記照射方向の前記局所直交座標系における単位ベクトルをen’とする。
このとき、
前記θはθ=cos−1(en’・e3’)
前記ψはψ=cos−1[{en’―(en’・e3’)e3’}・en’/|en’―(en’・e3’)e3’|]
前記φはφ=cos−1{cosθ・cosψ/(1−sin2θ・cos2ψ)1/2}
(ここで(en’・e3’)は内積を表す)
と表わされることを特徴とする請求項5に記載の粒子線治療装置。
【請求項7】
被検体を載置する天板と、
前記天板を載置平面内で回転させる天板回転手段と、
前記天板を前記被検体の体軸方向に並進移動させる天板移動手段と、
前記天板に載置された前記被検体に向けて粒子線を照射する粒子線照射手段と、
前記粒子線照射手段を前記載置平面と直交する特定の平面内で被検体の周りを回転移動させる照射ノズル回転手段と、
前記粒子線照射手段と前記被検体との間に、略筒型の形状で該筒内に前記被検体を囲うように配置され、かつ粒子線照射手段からの前記粒子線を通過させる開口を有し、前記粒子線が前記被検体に照射されたときに発生するγ線を検出するPET検出器と、
前記PET検出器を前記粒子線の照射方向の軸に回転可能に保持する第1支持アームと、
前記第1支持アームを体軸の周囲に回転可能に保持する第2支持アームと、
前記PET検出器で検出されたγ線を基に画像を生成する画像生成手段と、
を備えた粒子線治療装置を制御する粒子線治療装置制御方法であって、
前記粒子線照射手段の回転の角度にかかわらず照射された粒子線が常に通過する点である照射中心を原点とする座標空間のベクトルで表される前記被検体への粒子線の照射方向の条件を入力として受ける段階と、
前記ベクトルを基に、前記粒子線照射手段の回転角度θを算出し、前記粒子線照射手段を該角度θ回転させる段階と、
前記ベクトルを基に、前記天板の回転角度ψを算出し、前記天板を該角度ψ回転させる段階と、
前記角度θ及び前記角度ψを基に、前記粒子線の照射方向が前記被検体の照射対象部位を通過するよう前記天板を前記体軸方向に並進移動させる段階と、
前記第2支持アームにより前記PET検出器を保持する前記第1支持アームを前記θとほぼ同じ角度で回転させる段階と、
前記第1支持アームによる前記PET検出器の回転角度φを算出し、前記第1支持アームにより前記PET検出器を該角度φ回転させる段階と、
を有することを特徴とする粒子線治療装置制御方法。
【図1】


【図2】
【図4】
【図7】
【図3】
【図5】
【図6】
【図2】
【図4】
【図7】
【図3】
【図5】
【図6】
【公開番号】特開2010−94421(P2010−94421A)
【公開日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願番号】特願2008−269816(P2008−269816)
【出願日】平成20年10月20日(2008.10.20)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願日】平成20年10月20日(2008.10.20)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]