
線形引張/剪断モデルを用いる衣服のシミュレーションの方法
衣服内において生じる変形は、2つの成分、面内及び面外の変形に分解される。引張及び剪断は、面内変形であり、曲げは、面外変形である。この方法において、数値シミュレーションは、リアルタイムで実行可能であり、そして、モデルは、従来のリアルタイムモデルに存在する、アーチファクトの著しい減少につながる、いくつかの欠陥を解消する。エネルギ関数におけるは、力の関数行列式が一定になるように、全てのタイムステップで線形方程式の大きな系を解くことを取り除く、一定なベクトルについてに置換される。その方法は、エッジベースの及び三角形ベースの両方の系に関する単純化された物理モデルを使用する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、線形引張/剪断モデルを用いる衣服のシミュレーションの方法に関し、より詳細には、線形化されたエネルギ関数を用いる衣服のシミュレーションの方法に関する。
【発明の概要】
【発明が解決しようとする課題】
【0002】
細部及びリアリズムを伴う十分なレベルの人間のアニメ化されたイメージを創り出すことが必要とされるとき、映画、アニメーション、ビデオゲーム、又はバーチャルリアリティ(VR)の別にかかわらず、衣服の動態的移動をシミュレートする問題が生じる。
不運にも、服飾のアニメーションは、未だにアニメータにとってストレスのたまる仕事のままである。フラストレーションに関する大きな理由の1つは、10000のポリゴンの衣服一式の1分の長いアニメーションを創るために2、3日のシミュレーション時間がかかるということを含む、服飾のシミュレーションの計算の量についてである。品質を徹底的にあきらめない限り、シミュレーションの時間はリアルタイムからほど遠い。
【課題を解決するための手段】
【0003】

【0004】
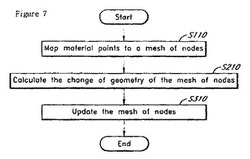
マテリアルポイントの配列の情報をマッピングすることは、衣服の複数のマテリアルポイントを選択すること、及び、複数のマテリアルポイントをノードのメッシュにマッピングすることを含む。メッシュは、標準三角形メッシュ及び標準矩形メッシュを含み得る。
【0005】
【0006】
【0007】
【0008】
【0009】
三角形は、異なる引張及び剪断歪みを有するが、歪みは各三角形内で一定である。
【0010】
【0011】
【0012】
【0013】
【0014】
方法は、さらに、メッシュの各ノード、位置制約、方向制約、混合制約、及び静的な位置制約、について操作することをさらに含む。アップデートすること及び操作することは、リアルタイムで実行され得る。
【図面の簡単な説明】
【0015】
本発明の種々の態様及び有利性が、以下の添付の図面と併せて、以下の実施形態の記載から明確になり、容易に理解されるであろう。
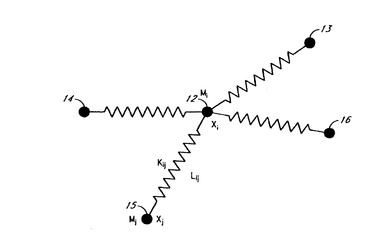
【図1】図1は、本発明による衣服のシミュレーティングのための質量ばねモデルを例示する図である。
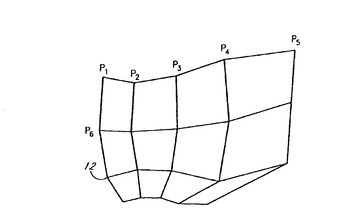
【図2】図2は、衣服のマテリアルポイントを表示するノードに関する矩形メッシュを例示する図であり、矩形メッシュは、四角形状を構成するためにそれぞれが近接するノードを伴う結合を有するノードを含む。
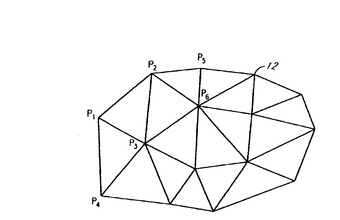
【図3】図3は、衣服のマテリアルポイントを表示するノードに関する三角形メッシュを例示する図であり、三角形メッシュは、三角形状を構成するためにそれぞれが近接するノードを伴う結合を有するノードを含む。
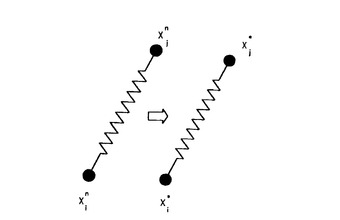
【図4】図4は、従来技術による変位の方向変化の概算のための方法を例示する概略図である。
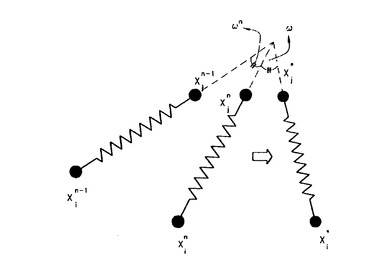
【図5】図5は、本発明の一実施形態による変位の方向変化を予測するための一次慣性エッジ回転法を例示する概略図である。
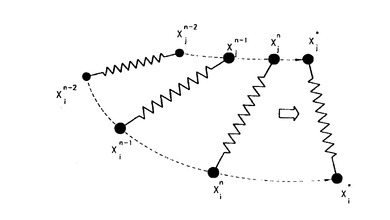
【図6】図6は、本発明のもう1つの実施形態による二次慣性頂点移動法を例示する概略図である。
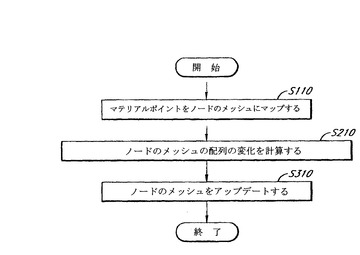
【図7】図7は、本発明による一実施形態のプロセスを例示するフローチャートである。
【発明を実施するための形態】
【0016】
本発明の様々な態様は、衣服のシミュレーションの新たな技術を提供する。開示される技術は、以前のリアルタイムモデルにおいて存在するいくつかの欠陥を改善する。また、新たな技術は、いくつかの質と速度の二律背反を可能にし、拡張性の幅広い範囲を与える。それ故、本発明の技術は、ビデオゲームやVRシミュレーションのようなリアルタイムアプリケーションにおける即時の使用を提供する。また、これらの技術は、衣服のより正確なバージョンを作る前に、衣服アニメーションを下見するためのオフラインシステムにも組み入れられ得る。
【0017】
衣服を表示するための物理モデルは、エッジベースの系及びエリア(面積)ベースの系の2つに分類される。三角形ベースの系、エリアベースの系が、3つのノードによって定義される各三角形の面積変形に基づく面内変形を単位とするのに対して、エッジベースの系は、エッジの現在の長さに基づく面内変形を単位とする。本発明の実施形態は、エッジベースの系及びエリアベースの系における引張/剪断変形に関する線形化された物理モデルを提供する。
【0018】
シミュレーションにおいて、図1に示すように、衣服の一片は、N個の粒子(P1,P2,…,PN)12,13,14,15,16で表示される。各粒子の位置及び質量は、それぞれxi及びmiとして示される。ベクトルx、3N次元ベクトルは、x1,x2,…,xNを結合することによって構成される。xi(i=1〜N)は、時間tによって変化する。位置及びベクトルが時間で変化していることから、それらは、xi(t)及びx(t)として記述され得る。及びxnは、n番目の離散タイムステップでのxi及びxの値である。また、表記法xij=xj−xiは、xi及びxjによって表示される位置を相互連結させるベクトルを表示するために使用される。xi及びxjによって表示される2つのノードで定義されるエッジは、xijによって表示され得る。
【0019】
引張エネルギ及び引張力のエッジベースのフォーミュレーション
変形したエッジxijで保たれる引張エネルギは、以下の式でモデル化され得る。
【0020】
ここで、Lij及びkijは、それぞれ、エッジの静止長及び剛性である。一旦エネルギポテンシャルが定義されると、その後、エッジxijから起因するPiに作用する復元力は、エネルギポテンシャルの空間導関数によって以下のように与えられる。
【0021】
上記は、マテリアルの復元傾向に起因し、そして、慣性力を呼ばれる。全ての近接するエッジからPiに作用する復元力fiは、その総和によって以下のように与えられる。
【0022】
ここで、N(i)は、Piが結合される粒子のインデックスの組である。
【0023】
【0024】
方程式4は、全ての(拘束されない)粒子について公式化され、それは、以下の微分方程式の系に組み入れられ得る。
【0025】
ここで、M及びFは、それぞれ、3N×3Nの質量行列及び3N×1の力のベクトルである。上記の方程式を解くことは、時間で変化する粒子の軌道を与える。
【0026】
インプリシットフォーミュレーション
エクスプリシットフォーミュレーションは、直感的に思われる。さらに、それは、線形方程式の系を解くことを求めるものではなく、それ故、実行するために直接的なものである。しかしながら、エクスプリシットフォーミュレーションは、数値的不安定となる傾向がある。非常に小さなタイムステップが使用されない限り、系はしばしば発散する。以下に記載されるインプリシットフォーミュレーションは、より安定的なものとして知られている。
【0027】
方程式5において示すエクスプリシットオイラー法との比較において、インプリシットオイラー法は、tn+1での導関数をサンプリングする。つまり、インプリシットオイラー法は、系の状態を以下の式によってアップデートする。
【0028】
正確には、これにおける時間積分は、セミインプリシットオイラー法と呼ばれる。しかし、それは、インプリシット法として簡単に参照される。
【0029】
【0030】
上記を方程式6に代入してΔxを消去すると、以下の式ができる。
【0031】
今、その方程式は、Δvについて解かれ、そしてその結果は、Δx=vn+Δvを計算するために使用され得る。上記の方程式において、以下の方程式となる。
【0032】
それは、方程式7が以下の式として記載されるようにするためである。
【0033】
【0034】
上記のスピードアップは、単純化された(精度の低い)物理モデルを採用することの結果であり、詳細は後で記載されるであろう。インプリシットフォーミュレーションとの関係で行列Aが一定になるということを生じる引張モデルは、以下に記載されるDesbrun et al.参照文献[11]によって既に開示されている。それらの単純化は、明らかにアーチファクト(artifacts)となる回転運動を見逃すことに基づいていた。それらからのモデルの相違は、単純化が、回転運動のせいであるということである。結果として、開示されるその方法は、顕著に改良された結果をつくり出すことができる。
【0035】
過去数十年にわたる様々なグループの先駆的な研究、以下にまた記載される[4]、[2]、[13]、[8]、[1]、[5]、[3]のおかげで、衣服は、今、驚異的なリアリズムでシミュレートされ得る。例えば、自然な皺は、今、粒子モデルを使用して創り出されることが可能であり、そして、衣服のシミュレーションにおける衝突処理の構造安定性は、かなり改善された。アニメーションの質において行われた改良にしたがって、全体のシミュレーションアルゴリズムは、相応な速度で作動するように改善された。例えば、約10000個の粒子で表示される衣服一式の30秒の長いアニメーションを創り出すことは、従来技術において、レンダリングのための時間を除いて2、3日かかる。
【0036】
しかしながら、シミュレーション速度がより速くなるべきいくつかのアプリケーション分野が存在する。例えば、ビデオゲームにおいて、衣服のアニメーションは、リアルタイムで生成されるべきである。Desbrun、 Schroder、及び Barr参照文献[11]は、衣服のような対象物のリアルタイムシミュレーションの問題を先駆的に解決した。セミインプリシット法を加速するために、彼らは、非線形の力の成分を省略し、そして、一定の系の行列に起因する力の関数行列式を計算することにおいて、線形成分だけを使用した。それ故、一旦、反転された系の行列が初期段階で事前計算されると、線形系は、全てのタイムステップで解かれる必要がなくなった。非線形成分の省略は、不自然な結果(アーチファクト)に導かれ得る。無視された非線形の力からの可能性のあるエラーを補償するために、角運動量補正ステップが、各タイムステップのシミュレーションの終わりで採用される。しかし、それらのステップは、完全に問題を解決できるわけではない。補正ステップが広範囲の角運動量を維持することができたとしても、それらは、局所の角運動量を維持することはできなかった。物理モデルはまた、系の行列を一定にする。しかし、非線形の力は、関数行列式の計算において、全く見落とされていない。
【0037】
Kang、 Choi、及びCho参照文献[10]、[9]はまた、反転されたヘッシアン行列を事前計算する、又は、大きな線形の系を解くことを回避するセミインプリシット法の単純化を開示した。O(n)時間コストを達成するために、各衣服粒子の速度変化が、結合される近くの粒子の明確に概算された将来の速度を使用して直接アップデートされる。
【0038】
最近、Cordiner及びThalmannは、参照文献[7]において、リアルタイムの衣服のアニメーションシステムを示した。彼らは、衣服の運動パターンに基づいて、衣服を3つのカテゴリ(タイト、ルース、フローティング)に分類し、そして、それらを各カテゴリにおいてアニメートするための異なるアプローチを採用した。タイト/ルース範囲の運動は、体の動きに高く依存し、そしてそれ故、そのような範囲が、フル3D(3次元)シミュレーションを必要とし得ない。幾何学的技術が、タイト及びルースな範囲のために使用された。一方で、セミインプリシット法を伴う粒子系は、フローティング範囲に使用された。フローティング範囲が、普通の衣服における小さな部分だけを持ち上げるということから、上記の技術は、リアルタイムアニメーションを達成できた。
【0039】
エッジベースの線形引張モデル
エッジベースの系は、面内変形が、エッジに沿う引張によって現実化する衣服の質量ばね表示(図1参照)を参照する。基本の変形可能な単位はエッジである。引張エネルギ関数は、復元力及び力の関数行列式が導き出されるように、2つの粒子Pi及びPjの間のエッジに関して開示される。それは、メッシュの限られた部分だけ(すなわちエッジだけ)に着目することによって変形を判断することから、位相結合性が全てのエッジで同じに維持されるときに、エッジベースの系は、より意味のあるものになる。それ故、エッジベースの系は、図2に示されるように、標準のメッシュに関してほとんど採用される。衣服のシミュレーションについて考えられる2種類の標準のメッシュ、図3に示すような標準三角形メッシュ、及び、図2に示されるような標準矩形メッシュがある。矩形メッシュが使用されるとき、剪断変形が、対角(斜め)結合を行うことによって、上記のエッジベースの引張モデルを使用してシミュレートされ得る。
【0040】
従来の引張モデル
引張力及びその関数行列式は、エネルギ関数から導かれる。そのため、一定な系を導く物理モデルを開発する手間が、そのような単純化する特性を有する新たなエネルギ関数を見つけるということに対して軽減される。従来のエネルギ関数の導関数は以下の通りである。
【0041】
これは以下の式をつくる。
【0042】
この式はxi又はxjに関して線形ではない。それ故、力の関数行列式∂f/∂xは、時間について一定ではない。それから、方程式10において与えられる線形の系は、全ての時間ステップで解かれるべきである。
【0043】
もし、標準の演算子|・|がなかった場合、fiは線形となるであろう。そのため、問題は、「標準演算子であるがその値が方程式11のそれに近い使用を取り除くエネルギ関数を見つけることができるか?」として換言される。
【0044】
引張モデル
使用されるエネルギ関数は以下の通りである。
【0045】
【0046】
【0047】
【0048】
【0049】
【0050】
【0051】
【0052】
【0053】
【0054】
同様に、tn-1での角速度ωn-1は、以下の式で近似される。
【0055】
今、tn+1での角速度ωが推定される。一次予測を使用して、ωが以下の式によって計算される。
【0056】
二次予測を使用して、ωは以下の式によって計算される。
【0057】
または、より一般的な二次予測を使用して、ωは以下の式によって計算される。
【0058】
ここで、αとβは、適合される定数である。ωの一般的な高次のエクスプリシット予測は、以下の式で行われ得る。
【0059】
ここで、αm(m=0,…,M)は適合される定数である。
【0060】
【0061】
【0062】
【0063】
【0064】
【0065】
ここで、α及びβは適合される定数である。二次推定が以下のように行われ得る。
【0066】
しかし、より一般的な二次推定は以下のように行われ得る。
【0067】
ここで、γ、δ及びλは、適合される定数である。一般的な高次の推定は以下の式で行われ得る。
【0068】
ここで、αm(m=0,…,M)は適合される定数である。
【0069】
IVT法(IER法と比較される)の原理的な考えは、新たな頂点位置を推定するための特定のスキーム内になく、しかし、頂点を自由に移動する粒子として取り扱うということにある。
【0070】
【0071】
IVT法が使用されるとき、振動を生じるアーチファクトは、IER法と比較して軽減される。その現象は、二次推定が使用されるときに、より重要である。
【0072】
剪断及び曲げ変形の表示
エッジベースの系についての線形引張モデルが使用された。衣服を表示することにおいて、他の2種類の変形、剪断と曲げもまた考えられる。
【0073】
矩形メッシュにおいて、剪断変形は、上記において、対角結合をつくることによって表されるモデルで表示され得る。矩形メッシュにおいて剪断変形を表示するために、開示されるモデルは、特に適切なものではない。しかしながら、三角形メッシュは、本質的に、メッシュ構造それ自体によって剪断変形から戻る傾向を有している。これは、モデルがオリジナルに生まれる傾向ではないという副作用である。三角形メッシュにおいて、剪断変形を明確に表示するために、三角形ベースの線形引張/剪断モデルにおいて表される技術が使用され得る。
【0074】
曲げは、そのモデルで明確に表示されない。しかしながら、不規則な三角形メッシュが使用されるとき、どのような特定の曲げモデルを導入することなしでさえ、シミュレートされた結果は、曲げ変形からの復元の傾向を示すであろう。それは、衣服一式の曲げ剛性による(参照文献[12])。再び、それは、そのモデルがオリジナルに生じる傾向ではないという副作用である。この副作用は、曲げ変形が明確にシミュレートできないときのような場合に、有益に取り扱われ得る(リアルタイムアプリケーションにおいて、衣服のシミュレーションのために割り当てられる計算が通常制限される)。この副作用を有益に取り扱うということにおける興味深い態様は、メッシュの不規則性が有益であるということである。
【0075】
衣服のシミュレーションに割り当てられ得る計算が極めて不十分であるとき、その後、エッジベースの線形引張モデルは、剪断又は曲げ変形を明確にモデリングすることなく、不規則な三角形メッシュに採用され得る。モデルにおいてばねだけがエッジで、線形ばねである。エッジベースの線形引張モデルにおけるモデルの副作用は、剪断/曲げ変形を表示するために信頼され得る。その三角形のネットワークはその本質から、剪断変形から復元するための傾向を生じる。メッシュの不規則性は、曲げ変形から復元するための傾向を生じるであろう。そのため、線形引張モデルを不規則な三角形メッシュに適用することによって、剪断及び曲げ挙動は、副産物として得られる。その結果は、物理的に正確ではないが、速度が最大の問題であるときに、リアルタイムシステムを実行することにおいて有用となり得る。オフラインシステム内でも、もう1つの拡張可能なオプションを加える。エッジベースの線形引張モデルを上記に使用することは、単純であるが、衣服の非常に高速な表示となる。
【0076】
三角形ベースの線形引張/剪断モデル
三角形ベースの系は、面内変形が3つ頂点の配置によって実現する衣服の相互粒子表示を参照する。基本の変形単位は三角形である。Pi、Pj及びPkによって構成される三角形についての引張及び剪断エネルギ関数は、復元力及び力の関数行列式がそれから導かれるように開示される。それは、エッジにただ着目するのではなく、その(三角形の)エリアに着目することによって変形を判断することから、三角形ベースの系は、メッシュの不規則性に対して感受性が低い。エッジベースの線形引張モデルとの顕著な相違は、三角形ベースのモデルにおいて、剪断変形に起因し得るということである。
【0077】
【0078】
【0079】
ここで、a,b,c,p,q及びrは、マテリアル空間内における(変形していない)トライアンギュライゼーション(triangulization)から決定される。
【0080】
従来の引張及び剪断モデル
前に開示された三角形ベースのモデルにおいて、引張エネルギを表示するために一般に使用された式は参照文献[1]であり、以下の通りである。
【0081】
【0082】
そして、グループ[6]は以下の式を使用した。
【0083】
【0084】
引張及び剪断モデル
エネルギ関数は以下の通りである。
【0085】
【0086】
【0087】
【0088】
【0089】
【0090】
【0091】
ωの推定は、エッジベースの線形引張モデルにその手順を導入することによって行われ得る。
【0092】
2)慣性頂点移動:衣服の移動についての以前の情報がなにもないときに、実行すべきもう1つの妥当な仮定は、頂点が慣性移動をつくるであろうということである。エッジベースの線形引張モデルに導入される同じ手順が、の予測される位置を得るために適用され得る。その後、それらの線形結合が方程式29及び30によって以下の推定をつくるために採用される。
【0093】
本発明の実施形態は、以下を与える。
【0094】
【0095】
【0096】
3)ωのエクスプリシット予測:予測のために方程式18〜21を使用することが開示される。
【0097】
【0098】
【0099】
6)剪断変形又は曲げ変形又はその両方が明確にモデル化されないままで、衣服を表示するために、エッジベースの線形引張モデルを使用すること:それは、純粋な質量−ばねモデルである。その副作用は、剪断及び/又は曲げ変形からの復元について依存する。この単純なモデルを使用することの主要な利益は、そのスピードアップである。
【0100】
7)三角形ベースの系についての線形化可能なエネルギ関数:三角形の面内の引張及び剪断エネルギ関数を形式化するために、方程式34及び35を使用することが開示される。
【0101】
【0102】
【0103】
【0104】
【0105】
本発明の様々な実施形態が示されそして記述されたが、この実施形態において、本発明の原理及び思想、請求項及びその等価物において定義される範囲を逸脱することなく変更が行われ得るということが当業者に理解されるであろう。
【0106】
この出願は、ここで、参照によって以下の書類及び刊行物をその全体において組み入れる。
【0107】
[1]David Baraff 及びAndrew Witkin。「Large steps in cloth simulation. In Proceedings of SIGGRAPH 98, Computer Graphics Proceedings, Annual Conference Series, pages 43-54. ACM, ACM Press / ACM SIGGRAPH, 1998」
【0108】
[2]David E、Breen, Donald H、House, 及び Michael J、Wozny。「Predicting the drape of woven cloth using interacting particles. In Proceedings of SIGGRAPH 94, Computer Graphics Proceedings, Annual Conference Series, pages 365-372. ACM, ACM Press / ACM SIGGRAPH, July 1994」
【0109】
[3]Robert Bridson, Ronald P. Fedkiw, 及びJohn Anderson。「Robust treatment of collisions, contact, and friction for cloth animation. In John Hughes, editor, SIGGRAPH 2002 Conference Proceedings, Annual Conference Series, pages 594-603. ACM Press/ACM SIGGRAPH, 2002」
【0110】
[4]Michel Carignan、Ying Yang、Nadia Magnenat-Thalmann、及びDaniel Thalmann。「Dressing animated synthetic actors with complex deformable clothes. In Computer Graphics (Proceedings of ACM SIGGRAPH 92), pages 99-104. ACM, July 1992」
【0111】
[5]Kwang-Jin Choi及びHyeong-Seok Ko。「Stable but resposive cloth. In John Hughes, editor, SIGGRAPH 2002 Conference Proceedings, Annual Conference Series, pages 604-611. ACM Press/ACM SIGGRAPH, 2002」
【0112】
[6]Kwang-Jin Choi及びHyeong-Seok Ko。「Extending the immediate buckling model to triangular meshes for simulating complex clothes. In Eurographics 2003, short paper, 2003」
【0113】
[7]Frederic Cordiner及びNadia Magnenat-Thalmann。「Real-time animation of dressed virtual humans. In Eurographics 2002, 2002」
【0114】
[8]Frederic Cordiner及びNadia Magnenat-Thalmann。「Real-time animation of dressed virtual humans. In Eurographics 2002, 2002」
【0115】
[9]Young-Min Kang及びHwan-Gue Cho。「Bilayered approach for efficient animation of cloth with realistic wrinkles. In Computer Animation 2002, 2002」
【0116】
[10]Young-Min Kang、Jeong-Hyeon Choi、Hwan-Gue Cho、及びChan-Jong Park。「Fast and stable animation of cloth with an approximated implicit method. In Computer Graphics International, pages 247-256, 2000」
【0117】
[11]Mark Meyer、Gilles Debunne、Mathieu Desbrun、及びAlan H. Barr。「Interactive animation of cloth-like objects in virtual reality. Journal of Visualization and Computer Animation (JVCA), 2000l」
【0118】
[12]P. Volino及びN. Magnenat-Thalmann。「Implementing fast cloth simulation with collision response. In Proceedings of the Conference on Computer Graphics International (CGI-00), pages 257-268, June 19-24 2000」
【0119】
[13]Pascal Volino、Martin Courshesnes、及びNadia Magnenat Thalmann。「Versatile and efficient techniques for simulating cloth and other deformable objects. In Proceedings of SIGGRAPH 95, Computer Graphics Proceedings, Annual Conference Series, pages 137-144. ACM, ACM Press / ACM SIGGRAPH, August 1995」
【技術分野】
【0001】
本発明は、線形引張/剪断モデルを用いる衣服のシミュレーションの方法に関し、より詳細には、線形化されたエネルギ関数を用いる衣服のシミュレーションの方法に関する。
【発明の概要】
【発明が解決しようとする課題】
【0002】
細部及びリアリズムを伴う十分なレベルの人間のアニメ化されたイメージを創り出すことが必要とされるとき、映画、アニメーション、ビデオゲーム、又はバーチャルリアリティ(VR)の別にかかわらず、衣服の動態的移動をシミュレートする問題が生じる。
不運にも、服飾のアニメーションは、未だにアニメータにとってストレスのたまる仕事のままである。フラストレーションに関する大きな理由の1つは、10000のポリゴンの衣服一式の1分の長いアニメーションを創るために2、3日のシミュレーション時間がかかるということを含む、服飾のシミュレーションの計算の量についてである。品質を徹底的にあきらめない限り、シミュレーションの時間はリアルタイムからほど遠い。
【課題を解決するための手段】
【0003】
【0004】
マテリアルポイントの配列の情報をマッピングすることは、衣服の複数のマテリアルポイントを選択すること、及び、複数のマテリアルポイントをノードのメッシュにマッピングすることを含む。メッシュは、標準三角形メッシュ及び標準矩形メッシュを含み得る。
【0005】
【0006】
【0007】
【0008】
【0009】
三角形は、異なる引張及び剪断歪みを有するが、歪みは各三角形内で一定である。
【0010】
【0011】
【0012】
【0013】
【0014】
方法は、さらに、メッシュの各ノード、位置制約、方向制約、混合制約、及び静的な位置制約、について操作することをさらに含む。アップデートすること及び操作することは、リアルタイムで実行され得る。
【図面の簡単な説明】
【0015】
本発明の種々の態様及び有利性が、以下の添付の図面と併せて、以下の実施形態の記載から明確になり、容易に理解されるであろう。
【図1】図1は、本発明による衣服のシミュレーティングのための質量ばねモデルを例示する図である。
【図2】図2は、衣服のマテリアルポイントを表示するノードに関する矩形メッシュを例示する図であり、矩形メッシュは、四角形状を構成するためにそれぞれが近接するノードを伴う結合を有するノードを含む。
【図3】図3は、衣服のマテリアルポイントを表示するノードに関する三角形メッシュを例示する図であり、三角形メッシュは、三角形状を構成するためにそれぞれが近接するノードを伴う結合を有するノードを含む。
【図4】図4は、従来技術による変位の方向変化の概算のための方法を例示する概略図である。
【図5】図5は、本発明の一実施形態による変位の方向変化を予測するための一次慣性エッジ回転法を例示する概略図である。
【図6】図6は、本発明のもう1つの実施形態による二次慣性頂点移動法を例示する概略図である。
【図7】図7は、本発明による一実施形態のプロセスを例示するフローチャートである。
【発明を実施するための形態】
【0016】
本発明の様々な態様は、衣服のシミュレーションの新たな技術を提供する。開示される技術は、以前のリアルタイムモデルにおいて存在するいくつかの欠陥を改善する。また、新たな技術は、いくつかの質と速度の二律背反を可能にし、拡張性の幅広い範囲を与える。それ故、本発明の技術は、ビデオゲームやVRシミュレーションのようなリアルタイムアプリケーションにおける即時の使用を提供する。また、これらの技術は、衣服のより正確なバージョンを作る前に、衣服アニメーションを下見するためのオフラインシステムにも組み入れられ得る。
【0017】
衣服を表示するための物理モデルは、エッジベースの系及びエリア(面積)ベースの系の2つに分類される。三角形ベースの系、エリアベースの系が、3つのノードによって定義される各三角形の面積変形に基づく面内変形を単位とするのに対して、エッジベースの系は、エッジの現在の長さに基づく面内変形を単位とする。本発明の実施形態は、エッジベースの系及びエリアベースの系における引張/剪断変形に関する線形化された物理モデルを提供する。
【0018】
シミュレーションにおいて、図1に示すように、衣服の一片は、N個の粒子(P1,P2,…,PN)12,13,14,15,16で表示される。各粒子の位置及び質量は、それぞれxi及びmiとして示される。ベクトルx、3N次元ベクトルは、x1,x2,…,xNを結合することによって構成される。xi(i=1〜N)は、時間tによって変化する。位置及びベクトルが時間で変化していることから、それらは、xi(t)及びx(t)として記述され得る。及びxnは、n番目の離散タイムステップでのxi及びxの値である。また、表記法xij=xj−xiは、xi及びxjによって表示される位置を相互連結させるベクトルを表示するために使用される。xi及びxjによって表示される2つのノードで定義されるエッジは、xijによって表示され得る。
【0019】
引張エネルギ及び引張力のエッジベースのフォーミュレーション
変形したエッジxijで保たれる引張エネルギは、以下の式でモデル化され得る。
【0020】
ここで、Lij及びkijは、それぞれ、エッジの静止長及び剛性である。一旦エネルギポテンシャルが定義されると、その後、エッジxijから起因するPiに作用する復元力は、エネルギポテンシャルの空間導関数によって以下のように与えられる。
【0021】
上記は、マテリアルの復元傾向に起因し、そして、慣性力を呼ばれる。全ての近接するエッジからPiに作用する復元力fiは、その総和によって以下のように与えられる。
【0022】
ここで、N(i)は、Piが結合される粒子のインデックスの組である。
【0023】
【0024】
方程式4は、全ての(拘束されない)粒子について公式化され、それは、以下の微分方程式の系に組み入れられ得る。
【0025】
ここで、M及びFは、それぞれ、3N×3Nの質量行列及び3N×1の力のベクトルである。上記の方程式を解くことは、時間で変化する粒子の軌道を与える。
【0026】
インプリシットフォーミュレーション
エクスプリシットフォーミュレーションは、直感的に思われる。さらに、それは、線形方程式の系を解くことを求めるものではなく、それ故、実行するために直接的なものである。しかしながら、エクスプリシットフォーミュレーションは、数値的不安定となる傾向がある。非常に小さなタイムステップが使用されない限り、系はしばしば発散する。以下に記載されるインプリシットフォーミュレーションは、より安定的なものとして知られている。
【0027】
方程式5において示すエクスプリシットオイラー法との比較において、インプリシットオイラー法は、tn+1での導関数をサンプリングする。つまり、インプリシットオイラー法は、系の状態を以下の式によってアップデートする。
【0028】
正確には、これにおける時間積分は、セミインプリシットオイラー法と呼ばれる。しかし、それは、インプリシット法として簡単に参照される。
【0029】
【0030】
上記を方程式6に代入してΔxを消去すると、以下の式ができる。
【0031】
今、その方程式は、Δvについて解かれ、そしてその結果は、Δx=vn+Δvを計算するために使用され得る。上記の方程式において、以下の方程式となる。
【0032】
それは、方程式7が以下の式として記載されるようにするためである。
【0033】
【0034】
上記のスピードアップは、単純化された(精度の低い)物理モデルを採用することの結果であり、詳細は後で記載されるであろう。インプリシットフォーミュレーションとの関係で行列Aが一定になるということを生じる引張モデルは、以下に記載されるDesbrun et al.参照文献[11]によって既に開示されている。それらの単純化は、明らかにアーチファクト(artifacts)となる回転運動を見逃すことに基づいていた。それらからのモデルの相違は、単純化が、回転運動のせいであるということである。結果として、開示されるその方法は、顕著に改良された結果をつくり出すことができる。
【0035】
過去数十年にわたる様々なグループの先駆的な研究、以下にまた記載される[4]、[2]、[13]、[8]、[1]、[5]、[3]のおかげで、衣服は、今、驚異的なリアリズムでシミュレートされ得る。例えば、自然な皺は、今、粒子モデルを使用して創り出されることが可能であり、そして、衣服のシミュレーションにおける衝突処理の構造安定性は、かなり改善された。アニメーションの質において行われた改良にしたがって、全体のシミュレーションアルゴリズムは、相応な速度で作動するように改善された。例えば、約10000個の粒子で表示される衣服一式の30秒の長いアニメーションを創り出すことは、従来技術において、レンダリングのための時間を除いて2、3日かかる。
【0036】
しかしながら、シミュレーション速度がより速くなるべきいくつかのアプリケーション分野が存在する。例えば、ビデオゲームにおいて、衣服のアニメーションは、リアルタイムで生成されるべきである。Desbrun、 Schroder、及び Barr参照文献[11]は、衣服のような対象物のリアルタイムシミュレーションの問題を先駆的に解決した。セミインプリシット法を加速するために、彼らは、非線形の力の成分を省略し、そして、一定の系の行列に起因する力の関数行列式を計算することにおいて、線形成分だけを使用した。それ故、一旦、反転された系の行列が初期段階で事前計算されると、線形系は、全てのタイムステップで解かれる必要がなくなった。非線形成分の省略は、不自然な結果(アーチファクト)に導かれ得る。無視された非線形の力からの可能性のあるエラーを補償するために、角運動量補正ステップが、各タイムステップのシミュレーションの終わりで採用される。しかし、それらのステップは、完全に問題を解決できるわけではない。補正ステップが広範囲の角運動量を維持することができたとしても、それらは、局所の角運動量を維持することはできなかった。物理モデルはまた、系の行列を一定にする。しかし、非線形の力は、関数行列式の計算において、全く見落とされていない。
【0037】
Kang、 Choi、及びCho参照文献[10]、[9]はまた、反転されたヘッシアン行列を事前計算する、又は、大きな線形の系を解くことを回避するセミインプリシット法の単純化を開示した。O(n)時間コストを達成するために、各衣服粒子の速度変化が、結合される近くの粒子の明確に概算された将来の速度を使用して直接アップデートされる。
【0038】
最近、Cordiner及びThalmannは、参照文献[7]において、リアルタイムの衣服のアニメーションシステムを示した。彼らは、衣服の運動パターンに基づいて、衣服を3つのカテゴリ(タイト、ルース、フローティング)に分類し、そして、それらを各カテゴリにおいてアニメートするための異なるアプローチを採用した。タイト/ルース範囲の運動は、体の動きに高く依存し、そしてそれ故、そのような範囲が、フル3D(3次元)シミュレーションを必要とし得ない。幾何学的技術が、タイト及びルースな範囲のために使用された。一方で、セミインプリシット法を伴う粒子系は、フローティング範囲に使用された。フローティング範囲が、普通の衣服における小さな部分だけを持ち上げるということから、上記の技術は、リアルタイムアニメーションを達成できた。
【0039】
エッジベースの線形引張モデル
エッジベースの系は、面内変形が、エッジに沿う引張によって現実化する衣服の質量ばね表示(図1参照)を参照する。基本の変形可能な単位はエッジである。引張エネルギ関数は、復元力及び力の関数行列式が導き出されるように、2つの粒子Pi及びPjの間のエッジに関して開示される。それは、メッシュの限られた部分だけ(すなわちエッジだけ)に着目することによって変形を判断することから、位相結合性が全てのエッジで同じに維持されるときに、エッジベースの系は、より意味のあるものになる。それ故、エッジベースの系は、図2に示されるように、標準のメッシュに関してほとんど採用される。衣服のシミュレーションについて考えられる2種類の標準のメッシュ、図3に示すような標準三角形メッシュ、及び、図2に示されるような標準矩形メッシュがある。矩形メッシュが使用されるとき、剪断変形が、対角(斜め)結合を行うことによって、上記のエッジベースの引張モデルを使用してシミュレートされ得る。
【0040】
従来の引張モデル
引張力及びその関数行列式は、エネルギ関数から導かれる。そのため、一定な系を導く物理モデルを開発する手間が、そのような単純化する特性を有する新たなエネルギ関数を見つけるということに対して軽減される。従来のエネルギ関数の導関数は以下の通りである。
【0041】
これは以下の式をつくる。
【0042】
この式はxi又はxjに関して線形ではない。それ故、力の関数行列式∂f/∂xは、時間について一定ではない。それから、方程式10において与えられる線形の系は、全ての時間ステップで解かれるべきである。
【0043】
もし、標準の演算子|・|がなかった場合、fiは線形となるであろう。そのため、問題は、「標準演算子であるがその値が方程式11のそれに近い使用を取り除くエネルギ関数を見つけることができるか?」として換言される。
【0044】
引張モデル
使用されるエネルギ関数は以下の通りである。
【0045】
【0046】
【0047】
【0048】
【0049】
【0050】
【0051】
【0052】
【0053】
【0054】
同様に、tn-1での角速度ωn-1は、以下の式で近似される。
【0055】
今、tn+1での角速度ωが推定される。一次予測を使用して、ωが以下の式によって計算される。
【0056】
二次予測を使用して、ωは以下の式によって計算される。
【0057】
または、より一般的な二次予測を使用して、ωは以下の式によって計算される。
【0058】
ここで、αとβは、適合される定数である。ωの一般的な高次のエクスプリシット予測は、以下の式で行われ得る。
【0059】
ここで、αm(m=0,…,M)は適合される定数である。
【0060】
【0061】
【0062】
【0063】
【0064】
【0065】
ここで、α及びβは適合される定数である。二次推定が以下のように行われ得る。
【0066】
しかし、より一般的な二次推定は以下のように行われ得る。
【0067】
ここで、γ、δ及びλは、適合される定数である。一般的な高次の推定は以下の式で行われ得る。
【0068】
ここで、αm(m=0,…,M)は適合される定数である。
【0069】
IVT法(IER法と比較される)の原理的な考えは、新たな頂点位置を推定するための特定のスキーム内になく、しかし、頂点を自由に移動する粒子として取り扱うということにある。
【0070】
【0071】
IVT法が使用されるとき、振動を生じるアーチファクトは、IER法と比較して軽減される。その現象は、二次推定が使用されるときに、より重要である。
【0072】
剪断及び曲げ変形の表示
エッジベースの系についての線形引張モデルが使用された。衣服を表示することにおいて、他の2種類の変形、剪断と曲げもまた考えられる。
【0073】
矩形メッシュにおいて、剪断変形は、上記において、対角結合をつくることによって表されるモデルで表示され得る。矩形メッシュにおいて剪断変形を表示するために、開示されるモデルは、特に適切なものではない。しかしながら、三角形メッシュは、本質的に、メッシュ構造それ自体によって剪断変形から戻る傾向を有している。これは、モデルがオリジナルに生まれる傾向ではないという副作用である。三角形メッシュにおいて、剪断変形を明確に表示するために、三角形ベースの線形引張/剪断モデルにおいて表される技術が使用され得る。
【0074】
曲げは、そのモデルで明確に表示されない。しかしながら、不規則な三角形メッシュが使用されるとき、どのような特定の曲げモデルを導入することなしでさえ、シミュレートされた結果は、曲げ変形からの復元の傾向を示すであろう。それは、衣服一式の曲げ剛性による(参照文献[12])。再び、それは、そのモデルがオリジナルに生じる傾向ではないという副作用である。この副作用は、曲げ変形が明確にシミュレートできないときのような場合に、有益に取り扱われ得る(リアルタイムアプリケーションにおいて、衣服のシミュレーションのために割り当てられる計算が通常制限される)。この副作用を有益に取り扱うということにおける興味深い態様は、メッシュの不規則性が有益であるということである。
【0075】
衣服のシミュレーションに割り当てられ得る計算が極めて不十分であるとき、その後、エッジベースの線形引張モデルは、剪断又は曲げ変形を明確にモデリングすることなく、不規則な三角形メッシュに採用され得る。モデルにおいてばねだけがエッジで、線形ばねである。エッジベースの線形引張モデルにおけるモデルの副作用は、剪断/曲げ変形を表示するために信頼され得る。その三角形のネットワークはその本質から、剪断変形から復元するための傾向を生じる。メッシュの不規則性は、曲げ変形から復元するための傾向を生じるであろう。そのため、線形引張モデルを不規則な三角形メッシュに適用することによって、剪断及び曲げ挙動は、副産物として得られる。その結果は、物理的に正確ではないが、速度が最大の問題であるときに、リアルタイムシステムを実行することにおいて有用となり得る。オフラインシステム内でも、もう1つの拡張可能なオプションを加える。エッジベースの線形引張モデルを上記に使用することは、単純であるが、衣服の非常に高速な表示となる。
【0076】
三角形ベースの線形引張/剪断モデル
三角形ベースの系は、面内変形が3つ頂点の配置によって実現する衣服の相互粒子表示を参照する。基本の変形単位は三角形である。Pi、Pj及びPkによって構成される三角形についての引張及び剪断エネルギ関数は、復元力及び力の関数行列式がそれから導かれるように開示される。それは、エッジにただ着目するのではなく、その(三角形の)エリアに着目することによって変形を判断することから、三角形ベースの系は、メッシュの不規則性に対して感受性が低い。エッジベースの線形引張モデルとの顕著な相違は、三角形ベースのモデルにおいて、剪断変形に起因し得るということである。
【0077】
【0078】
【0079】
ここで、a,b,c,p,q及びrは、マテリアル空間内における(変形していない)トライアンギュライゼーション(triangulization)から決定される。
【0080】
従来の引張及び剪断モデル
前に開示された三角形ベースのモデルにおいて、引張エネルギを表示するために一般に使用された式は参照文献[1]であり、以下の通りである。
【0081】
【0082】
そして、グループ[6]は以下の式を使用した。
【0083】
【0084】
引張及び剪断モデル
エネルギ関数は以下の通りである。
【0085】
【0086】
【0087】
【0088】
【0089】
【0090】
【0091】
ωの推定は、エッジベースの線形引張モデルにその手順を導入することによって行われ得る。
【0092】
2)慣性頂点移動:衣服の移動についての以前の情報がなにもないときに、実行すべきもう1つの妥当な仮定は、頂点が慣性移動をつくるであろうということである。エッジベースの線形引張モデルに導入される同じ手順が、の予測される位置を得るために適用され得る。その後、それらの線形結合が方程式29及び30によって以下の推定をつくるために採用される。
【0093】
本発明の実施形態は、以下を与える。
【0094】
【0095】
【0096】
3)ωのエクスプリシット予測:予測のために方程式18〜21を使用することが開示される。
【0097】
【0098】
【0099】
6)剪断変形又は曲げ変形又はその両方が明確にモデル化されないままで、衣服を表示するために、エッジベースの線形引張モデルを使用すること:それは、純粋な質量−ばねモデルである。その副作用は、剪断及び/又は曲げ変形からの復元について依存する。この単純なモデルを使用することの主要な利益は、そのスピードアップである。
【0100】
7)三角形ベースの系についての線形化可能なエネルギ関数:三角形の面内の引張及び剪断エネルギ関数を形式化するために、方程式34及び35を使用することが開示される。
【0101】
【0102】
【0103】
【0104】
【0105】
本発明の様々な実施形態が示されそして記述されたが、この実施形態において、本発明の原理及び思想、請求項及びその等価物において定義される範囲を逸脱することなく変更が行われ得るということが当業者に理解されるであろう。
【0106】
この出願は、ここで、参照によって以下の書類及び刊行物をその全体において組み入れる。
【0107】
[1]David Baraff 及びAndrew Witkin。「Large steps in cloth simulation. In Proceedings of SIGGRAPH 98, Computer Graphics Proceedings, Annual Conference Series, pages 43-54. ACM, ACM Press / ACM SIGGRAPH, 1998」
【0108】
[2]David E、Breen, Donald H、House, 及び Michael J、Wozny。「Predicting the drape of woven cloth using interacting particles. In Proceedings of SIGGRAPH 94, Computer Graphics Proceedings, Annual Conference Series, pages 365-372. ACM, ACM Press / ACM SIGGRAPH, July 1994」
【0109】
[3]Robert Bridson, Ronald P. Fedkiw, 及びJohn Anderson。「Robust treatment of collisions, contact, and friction for cloth animation. In John Hughes, editor, SIGGRAPH 2002 Conference Proceedings, Annual Conference Series, pages 594-603. ACM Press/ACM SIGGRAPH, 2002」
【0110】
[4]Michel Carignan、Ying Yang、Nadia Magnenat-Thalmann、及びDaniel Thalmann。「Dressing animated synthetic actors with complex deformable clothes. In Computer Graphics (Proceedings of ACM SIGGRAPH 92), pages 99-104. ACM, July 1992」
【0111】
[5]Kwang-Jin Choi及びHyeong-Seok Ko。「Stable but resposive cloth. In John Hughes, editor, SIGGRAPH 2002 Conference Proceedings, Annual Conference Series, pages 604-611. ACM Press/ACM SIGGRAPH, 2002」
【0112】
[6]Kwang-Jin Choi及びHyeong-Seok Ko。「Extending the immediate buckling model to triangular meshes for simulating complex clothes. In Eurographics 2003, short paper, 2003」
【0113】
[7]Frederic Cordiner及びNadia Magnenat-Thalmann。「Real-time animation of dressed virtual humans. In Eurographics 2002, 2002」
【0114】
[8]Frederic Cordiner及びNadia Magnenat-Thalmann。「Real-time animation of dressed virtual humans. In Eurographics 2002, 2002」
【0115】
[9]Young-Min Kang及びHwan-Gue Cho。「Bilayered approach for efficient animation of cloth with realistic wrinkles. In Computer Animation 2002, 2002」
【0116】
[10]Young-Min Kang、Jeong-Hyeon Choi、Hwan-Gue Cho、及びChan-Jong Park。「Fast and stable animation of cloth with an approximated implicit method. In Computer Graphics International, pages 247-256, 2000」
【0117】
[11]Mark Meyer、Gilles Debunne、Mathieu Desbrun、及びAlan H. Barr。「Interactive animation of cloth-like objects in virtual reality. Journal of Visualization and Computer Animation (JVCA), 2000l」
【0118】
[12]P. Volino及びN. Magnenat-Thalmann。「Implementing fast cloth simulation with collision response. In Proceedings of the Conference on Computer Graphics International (CGI-00), pages 257-268, June 19-24 2000」
【0119】
[13]Pascal Volino、Martin Courshesnes、及びNadia Magnenat Thalmann。「Versatile and efficient techniques for simulating cloth and other deformable objects. In Proceedings of SIGGRAPH 95, Computer Graphics Proceedings, Annual Conference Series, pages 137-144. ACM, ACM Press / ACM SIGGRAPH, August 1995」
【特許請求の範囲】
【請求項1】
【請求項2】
マテリアルポイントの配列の情報をマッピングすることは、
衣服上の複数のマテリアルポイントを選択すること、及び
複数のマテリアルポイントをノードのメッシュにマッピングすること、
を含む請求項1に記載の方法。
【請求項3】
メッシュは、標準三角形メッシュ及び標準矩形メッシュを含む請求項2に記載の方法。
【請求項4】
各タイムステップで、ノードのメッシュの配列の変化を計算することは、インプリシットオイラー法を使用する請求項1に記載の方法。
【請求項5】
【請求項6】
【請求項7】
引張力がエネルギ関数の微分によって得られる請求項1に記載の方法。
【請求項8】
【請求項9】
【請求項10】
【請求項11】
【請求項12】
【請求項13】
三角形が異なる引張及び剪断歪みを有していても歪みが各三角形で一定である請求項12に記載の方法。
【請求項14】
【請求項15】
【請求項16】
【請求項17】
【請求項18】
【請求項19】
メッシュのノードについて、
位置制約、
方向制約、
混合制約、
静的な位置制約、
を操作することをさらに含む請求項12に記載の方法。
【請求項20】
【請求項1】
【請求項2】
マテリアルポイントの配列の情報をマッピングすることは、
衣服上の複数のマテリアルポイントを選択すること、及び
複数のマテリアルポイントをノードのメッシュにマッピングすること、
を含む請求項1に記載の方法。
【請求項3】
メッシュは、標準三角形メッシュ及び標準矩形メッシュを含む請求項2に記載の方法。
【請求項4】
各タイムステップで、ノードのメッシュの配列の変化を計算することは、インプリシットオイラー法を使用する請求項1に記載の方法。
【請求項5】
【請求項6】
【請求項7】
引張力がエネルギ関数の微分によって得られる請求項1に記載の方法。
【請求項8】
【請求項9】
【請求項10】
【請求項11】
【請求項12】
【請求項13】
三角形が異なる引張及び剪断歪みを有していても歪みが各三角形で一定である請求項12に記載の方法。
【請求項14】
【請求項15】
【請求項16】
【請求項17】
【請求項18】
【請求項19】
メッシュのノードについて、
位置制約、
方向制約、
混合制約、
静的な位置制約、
を操作することをさらに含む請求項12に記載の方法。
【請求項20】
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2010−533335(P2010−533335A)
【公表日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願番号】特願2010−515980(P2010−515980)
【出願日】平成20年7月11日(2008.7.11)
【国際出願番号】PCT/KR2008/004114
【国際公開番号】WO2009/011527
【国際公開日】平成21年1月22日(2009.1.22)
【出願人】(507171856)ソウル ナショナル ユニバーシティー インダストリー ファンデーション (14)
【公表日】平成22年10月21日(2010.10.21)
【国際特許分類】
【出願日】平成20年7月11日(2008.7.11)
【国際出願番号】PCT/KR2008/004114
【国際公開番号】WO2009/011527
【国際公開日】平成21年1月22日(2009.1.22)
【出願人】(507171856)ソウル ナショナル ユニバーシティー インダストリー ファンデーション (14)
[ Back to top ]