
荷電粒子ビーム照射システム
【課題】スポットスキャン法による粒子線治療において、照射時間を短縮可能な荷電粒子ビーム照射システムを提供する。
【解決手段】荷電粒子ビーム照射システム100は荷電粒子発生装置200とビーム輸送系300と照射装置500から構成される。制御装置600は、照射装置500内のビーム位置計測装置53から得られた出力から照射区画の照射完了毎にビーム位置・幅を演算する。制御装置600はその演算中にも次の照射区画への照射を続行する。
【解決手段】荷電粒子ビーム照射システム100は荷電粒子発生装置200とビーム輸送系300と照射装置500から構成される。制御装置600は、照射装置500内のビーム位置計測装置53から得られた出力から照射区画の照射完了毎にビーム位置・幅を演算する。制御装置600はその演算中にも次の照射区画への照射を続行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、粒子線照射システムに係り、特に荷電粒子ビームを腫瘍等の患部に照射して治療する荷電粒子ビーム照射システムに関する。
【背景技術】
【0002】
癌などの患者の患部に陽子及び炭素イオン等のいずれかの荷電粒子ビーム(イオンビーム)を照射する治療方法が知られている。この治療に用いる粒子線照射システムは、荷電粒子ビーム発生装置、ビーム輸送系、及び照射装置を備えている。
【0003】
照射装置の照射方式としては、散乱体によってビームを広げた後に患部形状に合わせて切り出す散乱体方式や、細いビームを患部領域内に走査させるビーム走査方式が知られている(例えば、非特許文献1、2084〜2089頁参照)。
【0004】
ビーム走査方式を用いた粒子線照射システムにおいて、荷電粒子ビーム発生装置の加速器で加速された荷電粒子ビームは、ビーム輸送系を経て照射装置に達し、照射装置に備えられた走査用電磁石でビーム進行方向に垂直な面で走査され、照射装置から患者の患部に照射される。
【0005】
ビーム走査方式において一様な照射野分布を形成する方法としては、上記の細いビーム適切に散乱させた後に円形、らせん状、あるいはジグザグ状に走査するワブラー法が知られている(特許文献1参照)。この場合には形成された一様分布を患部形状に合わせて切り出す必要がある。
【0006】
一方、細いビームを患部形状に合致させる、また一様ではなく任意の線量分布を形成する方法としてはスポットスキャン法が知られている(例えば、非特許文献1、2089〜2090頁参照)。これは患部形状を微小な標的区画(照射スポット)に分割しその区画ごとに所望の照射線量を予め設定して照射するものである。
【0007】
スポットスキャン方式の照射装置では、走査電磁石の励磁電流を変化させてビームの走査面上位置(照射位置)を制御するが、荷電粒子発生装置全体のビーム位置再現性、安定性等の様々な要因によりビームの位置がずれる可能性がある。そこで、これに対応するために照射線量を測定する以外にビーム位置を検出するビーム位置モニタを設け、ビームが正しい位置に照射されているかを判定し、その誤差が所定の許容値範囲を大きい場合は異常と判定し、インターロック信号を出力し荷電粒子ビームの発生を停止する制御手段が提唱されている(例えば、特許文献2)。また、ビーム位置のより正確な把握のため照射装置内に複数のビーム位置モニタを設けて、ビームの位置だけではなくその角度まで算出し判定に用いる制御手段も提唱されている(例えば、特許文献3)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許4158931号
【特許文献2】2005−296162号公報(段落[0049]等)
【特許文献3】2009−347号公報(段落[0056]等)
【非特許文献】
【0009】
【非特許文献1】「レビュー・オブ・サイエンティフィック・インスルメンツ(REVIEW OF SCIENTIFIC INSTRUMENTS)」,1993年8月,第64巻,p.2084〜2089
【非特許文献2】A. Smith, et al, “The M. D. Anderson proton therapy system”Med. Phys. Volume 36, Issue 9, pp. 4068-4083 2009
【発明の概要】
【発明が解決しようとする課題】
【0010】
スポットスキャン法において、将来ニーズとしてさらなる高精度な照射を目指し照射位置でのビーム径をより小さくする要求がある(例えば、非特許文献2)。一方、治療可能な患者数をなるべく増加させるための高線量率化の要求もある。ビーム径を小さくするとビーム位置の測定に要するモニタの高分解能化が必要となり、その演算のための時間がより長くなることが想定される。このように照射位置精度を担保し安全性を保つために実施されているビーム位置の測定及びその演算と判定の手段が複雑になるに従い、その時間が長期化し、スポットスキャン方式において必要な線量を照射するまでの時間内に占める増加して、照射時間が長くなる可能性がある。またその演算・判定時間の短縮化のためには演算用の回路や制御動作の高速化などが必要となる可能性がある。
【0011】
本発明の目的は、スポットスキャン法によるビーム照射に際して、照射位置精度を担保し安全性を保つためのビーム照射位置・幅の演算と判定に要する時間が長くなった場合でも、照射位置精度を維持したまま照射時間を短縮できる荷電粒子ビーム照射システムを提供することにある。
【課題を解決するための手段】
【0012】
上記目的を達成するために、本発明は、荷電粒子ビーム発生装置と、走査電磁石を有する照射装置と、照射線量計測装置と、ビーム位置計測装置とを備え、1つのスポットに照射される荷電粒子ビームの照射線量が目標線量に達したときに、走査電磁石の励磁電流を制御して荷電粒子ビームを走査し照射位置を次のスポットに変更する荷電粒子ビーム照射システムにおいて、荷電粒子ビーム位置検出装置からの信号に基づき、荷電粒子ビームの位置・幅を算出しかつこの荷電粒子ビームの位置・幅の演算値が許容値を逸脱しているかどうかの判定を行い、演算値が許容値を逸脱している場合にインターロック信号を出力し、荷電粒子ビーム発生装置からの荷電粒子ビームの出射を停止する制御装置を備え、この制御装置は、荷電粒子ビームの位置・幅を算出する演算中にも荷電粒子ビームを照射するよう前記荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御する。
【0013】
かかる構成により、照射位置精度を担保し安全性を保つためのビーム照射位置・幅の演算と判定を次のスポット(線量区画)の照射間にも実施できるため、その演算と判定に要する時間が長くなった場合でも照射時間を長くすることを避け、照射時間を短縮できる。
【0014】
また、本発明においては、制御装置は、荷電粒子ビームの位置・幅の演算値が許容値を逸脱していると判定した時点で、あるスポットに荷電粒子ビームが照射されている場合は、そのスポットへの照射完了を待って荷電粒子ビーム発生装置からの荷電粒子ビームの出射を停止する。これは照射中のスポットに対する照射を途中で中断した場合、その照射により生じる照射線量計測装置やビーム位置計測装置での信号出力が不足し、計測が不正確となるのを防止するためである。そして、本発明の制御装置は、1つのスポットへの荷電粒子ビームの照射開始以降、その後の荷電粒子ビームの走査完了の時点までの照射線量と、そのビーム走査完了の時点での次のスポットの照射線量の和が既定量未満であるときは、荷電粒子ビームの走査完了とともに次のスポットの照射を開始するが、照射線量の和が規定量を超えているときは、荷電粒子ビームの位置・幅を算出する演算が完了するまで、次のスポットの照射を開始しないよう荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御する。
【0015】
かかる構成により、ビーム位置・幅の判定によるビーム出射を停止させるインターロック信号が既定の照射線量内にて完了し、照射の精度を向上させ正常組織への照射を低減することができる。
【発明の効果】
【0016】
本発明によれば、スポットスキャン法によるビーム照射に際して、照射位置精度を担保し安全性を保つためのビーム照射位置・幅の演算と判定に要する時間が長くなった場合でも、ビーム位置演算のための非常に高速な装置を用いずに、照射位置精度を維持したまま照射時間を短縮することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の好適な一実施形態(第1の実施形態)である荷電粒子ビーム照射システムの全体概略構成を表す図である。
【図2】本発明の好適な一実施形態である荷電粒子ビーム照射システムに用いる照射装置の構成を示す図である。
【図3】照射対象である患部の深さ方向の特定層を示す図である。
【図4】本発明の好適な一実施形態である荷電粒子ビーム照射システムによるスポットスキャン法の第1の例の動作を示すタイミングチャートである。
【図5】荷電粒子ビーム照射システムによるスポットスキャン法において走査時間を短縮化した状態で本発明を適用しない場合の動作を示すタイミングチャートである。
【図6】本発明の好適な一実施形態である荷電粒子ビーム照射システムによるスポットスキャン法において走査時間を短縮化した状態の第1の例の動作を示すタイミングチャートである。
【図7】本発明の好適な一実施形態である荷電粒子ビーム照射システムによるスポットスキャン法において走査時間を短縮化した状態でスポット照射線量を変えた場合の第1の例の動作を示すタイミングチャートである。
【図8】本発明を適用しない場合の図4と図5のタイムチャートの動作を実現するフローチャートである。
【図9】本発明の好適な一実施形態を適用した図4、図6及び図7のタイムチャートの動作を実現するフローチャートである。
【図10】本発明の好適な他の実施形態である荷電粒子ビーム照射システムによるスポットスキャン法の第2の例としてラスタースキャン法を適用した場合の動作を示すタイミングチャートである。
【図11】本発明の好適な他の実施形態を適用した図10のタイムチャートの動作を実現するフローチャートである。
【発明を実施するための形態】
【0018】
以下、本発明の好適な実施形態である荷電粒子ビーム照射システムについて、図面を参照して説明する。
<第1の実施形態>
図1は、本発明の第1の実施形態における荷電粒子ビーム照射システムの全体構成を示す概略図である。
【0019】
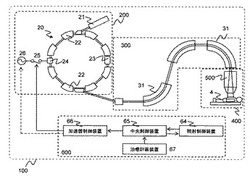
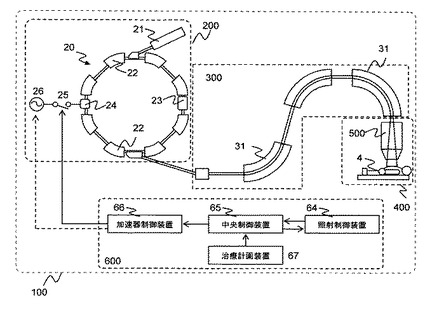
荷電粒子ビーム照射システム100は、荷電粒子ビーム発生装置200と、発生した荷電粒子ビームを治療室400まで導くビーム輸送系300と、治療室400で患者4の患部41(図2に記載)の形状に合わせて荷電粒子ビームを照射する照射装置500と、制御装置600とから構成される。
【0020】
荷電粒子ビーム発生装置200は、前段加速器21と、前段加速器21で予め加速した荷電粒子を所定のエネルギーまで加速したのち出射するシンクロトロン20とを有する。(なお、このシンクロトロンに代えて、例えばサイクロトロン等のような前段加速器を有しない加速器を用いてもよい。)
シンクロトロン20は、荷電粒子ビームを周回させるための複数の偏向電磁石22及び複数の四極電磁石(図示せず)と、周回する荷電粒子ビームを加速させる加速装置23と所定のエネルギーまで加速した荷電粒子ビームを出射する出射装置24を有する。
【0021】
出射装置24は、出射用高周波印加電極(図示せず)を有し、この高周波印加電極が出射用スイッチ25を介して高周波電源26に接続されており、出射用スイッチ25の開閉により荷電粒子ビームの出射をON/OFFする。
【0022】
ビーム輸送系300は、複数の偏向電磁石31と複数の四極電磁石(図示せず)を有し、シンクロトロン20から出射された荷電粒子ビームを照射装置500に輸送するようになっている。
【0023】
ここで、図2を用いて本実施形態による荷電粒子ビーム照射システムに用いる照射装置500の構成について説明する。
【0024】
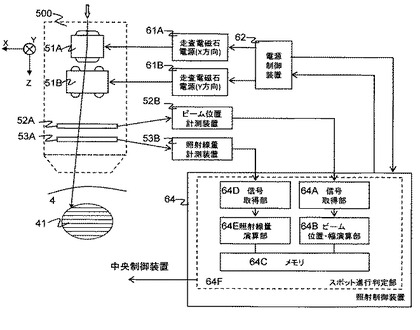
照射装置500は、ビーム輸送系300で導かれた荷電粒子ビームを水平(図中X方向)、垂直(紙面に垂直方向)に走査し患者4の患部41の形状に合致させるためのX方向走査電磁石51AとY方向走査電磁石51Bを有し、これらの走査電磁石51A,51Bは走査電磁石用電源61A,61Bとそれぞれ接続される。走査電磁石電源61A,61Bは電源制御装置62により制御される。走査電磁石51A,51Bにより偏向された荷電粒子ビームは、ビーム位置モニタ52A及び線量モニタ53Aを通過し、照射標的である患部41に照射される。ビーム位置モニタ52Aはビーム位置計測装置52Bに接続され、ビーム位置計測装置52Bは荷電粒子ビームの位置及び幅(広がり)を計測し、線量モニタ53Aは照射線量計測装置53Bに接続され、照射線量計測装置53Bは荷電粒子ビームの照射量を計測する。
【0025】
ビーム位置モニタ52AはX方向、Y方向それぞれに一定間隔ごとに並行にワイヤーが張られた電離箱構造となっている。ワイヤーには高電圧が印加されており、荷電粒子ビームがビーム位置モニタ52Aを通過するとビーム位置モニタ52A内の空気が電離されその電荷量は最も近いワイヤーに集められる。ビーム位置計測装置52Bは、各ワイヤー付近を通過して荷電粒子ビームの量に比例する信号をワイヤーより読みだすことで荷電粒子ビームの分布データを得ることが出来、ビーム位置すなわち分布の重心位置とビーム幅すなわち分布の標準偏差を算出することができる。なお、ビーム位置モニタ52Aにはワイヤーを張り信号を得るタイプ以外にも複数の電離箱を平面内に2次元に配置するタイプもありうる。
【0026】
図2は、照射制御装置64の処理機能も示しており、照射制御装置64は、信号取得部64A、ビーム位置・幅演算部64B、メモリ64C、信号取得部64D、照射線量演算部64Eからなるスポット進行判定部64Fを備えている。
【0027】
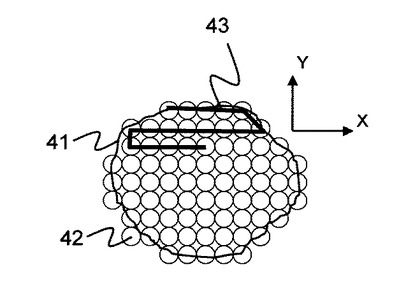
ここで、図2及び図3を用いてスポットスキャン法について説明する。図3は、荷電粒子ビームの上流側から患部41を見た説明図である。
【0028】
図2に示したように患者4の患部41に対して、その患部形状を3次元的な複数の深さ方向(図中Z方向)の層に分割し、各層をさらに図3に示すように、荷電粒子ビームの進行方向を横切る方向である水平方向(図中X−Y方向)に2次元的に分割して複数の線量区画42(以下照射スポット)を設定する。深さ方向は荷電粒子ビームの到達進度に対応しシンクロトロンから出射される荷電粒子ビームのエネルギー変更、あるいは照射装置500より上流でのエネルギー吸収体挿入などによる荷電粒子ビームのエネルギー変更により変更されて各層を選択的に照射する。各層内では図3に示す例えば43のような経路に沿って走査電磁石51A,51Bで荷電粒子ビームを2次元的に走査して各照射スポットに所定の線量を与える。各照射スポットに照射される荷電粒子ビームの量は線量モニタ53A及び照射線量計測装置53Bで計測され、荷電粒子ビームの位置やその広がり(幅)はビーム位置モニタ52A及びビーム位置計測装置52Bで計測される。
【0029】
上述したスポットスキャン照射制御は照射制御装置64によって行う。照射制御装置64は、複数の照射スポットのうちの1つのスポットに照射される荷電粒子ビームの照射線量が目標線量に達したときに、走査電磁石51A又は51Bの励磁電流を制御して荷電粒子ビームを走査し照射位置を次の照射スポットに変更する。また、本実施形態はいわゆるディスクリートスポットスキャン方式によるものであり、照射制御装置64は、1つのスポットに照射される荷電粒子ビームの照射線量が目標線量に達したときに、荷電粒子ビーム発生装置200からの荷電粒子ビームの出射を停止し、このビーム出射の停止状態で、走査電磁石51A又は51Bの励磁電流を制御して荷電粒子ビームを走査し照射位置を次の照射スポットに変更し、この変更後に、荷電粒子ビーム発生装置200からの荷電粒子ビームの出射を開始するよう制御する。
【0030】
また、照射制御装置64は、ビーム位置モニタ52A及びビーム位置計測装置52Bから得られた信号を照射制御装置64内の信号取得部64Aより読み出した後、ビーム位置・幅演算部64Bにてビーム位置とその幅を演算し、この荷電粒子ビームの位置・幅の演算値が許容値を逸脱しているかどうかを判定する。そして、荷電粒子ビームの位置・幅の演算値が許容値を逸脱している場合は中央制御装置65を介して加速器制御装置66にインターロック信号を出力し、荷電粒子ビーム発生装置200からの荷電粒子ビームの出射を停止する。
【0031】
ここで、より正確な位置や幅の測定のためにはビーム位置モニタ52Aは荷電粒子ビームの幅に対して十分小さい間隔のワイヤーを備えている必要があり、高精度な照射を目指して照射位置でのビーム径をより小さくした場合は、ビーム位置モニタ52Aに到達する荷電粒子ビームの幅が小さければ小さいほどそのワイヤー間間隔を小さくせざるを得ない。また照射可能な患部の大きさ、すなわち照射装置としての最大照射野サイズを大きくすればビーム位置モニタ52Aの測定可能な領域を大きくせざるを得ず、演算に用いる信号の数が大きくなる。このように演算に用いる信号の数が大きくなると、ビーム照射位置・幅の演算と判定に要する時間が長くなることが想定される。本実施の形態は、ビーム照射位置・幅の演算と判定に要する時間が長くなった場合でも、ビーム位置演算のための非常に高速な装置を用いずに、照射位置精度を維持したまま照射時間を短縮することができるようにしたものである。以下にその詳細を説明する。
【0032】
まず、図4のタイムチャートを用いて本実施形態の荷電粒子ビーム照射システムによるスポットスキャン法の第1の例の動作について説明する。この実施形態は、上述したように、照射スポットへ荷電粒子ビームを照射した後の照射スポット位置を変更する間には荷電粒子ビーム照射を照射しない、いわゆるディスクリートスポットスキャン方式によるものである。
【0033】
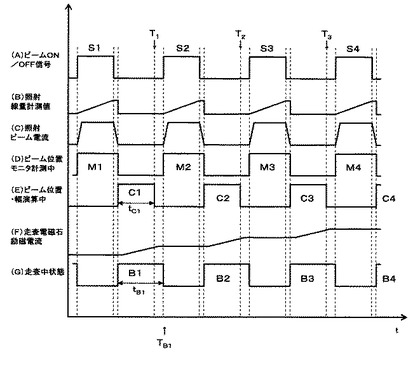
図4のタイムチャートは図3に示した患部内のある層を照射している間の動作を示す。
【0034】
図4において、横軸は時間tを示している。図4(A)の縦軸は照射制御装置64から中央制御装置65、加速器制御装置66を介し出射用スイッチ25に出力する開閉信号、すなわち荷電粒子ビームの出射を制御するビームON/OFF信号である。図4(A)に4つのON状態、すなわち4つの照射スポットがあるので、これらをそれぞれS1、S2、S3、S4とする。ここで、最初のビームON信号は、医師やセラピストが照射開始を指示した後、例えばシンクロトロン20のビーム入射、加速等のプロセスを経て、荷電粒子ビーム発生装置200のを含むシステム全体の動作準備が完了し、荷電粒子ビームが照射可能な状態になった時点で発生する。
【0035】
図4(B)の縦軸は照射された荷電粒子ビームの照射量を線量モニタ53A及び照射線量計測装置53Bで測定したもので、ビームONと同時に照射量が積算されていき、その計測信号は照射制御装置64の信号取得部64Dを介して照射線量演算部64Eに取り込まれる。照射線量演算部64Eは、積算線量が予め定められた量に達したところでビームOFFし、測定量を照射制御装置64のメモリ64Cにて記憶後、照射線量計測装置53Bはリセットされる。なおここでは線量モニタ53A及び照射線量計測装置53Bで計測される照射量を照射スポット毎にリセットするよう図示しているが、常に積算しその差分で照射量を判定してもよい。
【0036】
図4(C)は実際の荷電粒子ビームの照射電流を示しており、図4(B)で示した通り所定の線量に達してビームOFFとなった後にもOFFの反応時間があるため、微小な量の荷電粒子ビームが照射されることを示している。
【0037】
図4(D)の縦軸は図4(C)で示した照射ビームの位置・幅を測定するビーム位置モニタ52A及びビーム位置計測装置52Bの測定状態を示し、例えば照射スポットS1の計測、すなわちM1の区間での信号収集を照射制御装置64の信号取得部64Aが行う。図4(D)に示したビーム位置計測装置の信号収集が完了した後、ビーム位置・幅演算部64Bは、その取得した信号を基にビーム位置や幅(標準偏差)を演算し、予め照射制御装置64のメモリ64Cに設定されている許容値と比較しビーム位置・幅の値が所望の誤差範囲内にあるかどうかを判定する。図4(E)の縦軸はそのビーム位置・幅の演算実施状態を示しており、例えば照射スポットS1に対応した区間M1の測定信号を用いた演算を区間C1にてビーム位置・幅演算部64Bが実施する。
【0038】
ビーム位置・幅の演算結果が許容値を逸脱した場合には照射制御装置64がインターロック信号を発生し、次の照射スポットへの進行を停止させる。例えば照射スポットS1のビーム位置・幅演算結果が許容値を逸脱した場合には区間C1終了後、図4中のタイミングT1にて進行が停止する。
【0039】
図4(F)の縦軸は、図3に示したように荷電粒子を2次元的に走査する場合の走査電磁石電源61Aあるいは61Bの電流パターンを示している。このパターンは照射制御装置64において予め定められたパターンとなっており、各照射スポットでの照射線量が既定値に達し照射ビームが停止した後に順次励磁量を変更し、照射位置を変更する動作を示している。
【0040】
図4(G)の縦軸は走査電磁石電源61A又は61Bの状態を示し、励磁電流を変更して電流偏差が所望の範囲から逸脱している間は走査電磁石電源61A又は61BをON(以下走査中状態ONという)、例示電流の変更が完了し電流偏差が所望の範囲内に入ったことを判定した後に走査電磁石電源61A又は61BをOFF(以下走査中状態OFFという)する。すなわち、照射スポットS1に荷電粒子ビームを照射後に区間B1にて次の照射スポットへの照射位置変更を実施している。
【0041】
図4において、照射スポットS2の照射開始は照射スポットS1照射後の照射位置変更、すなわち図4(G)の走査中状態ONが完了したタイミングとなる。照射スポットS1完了後の流れが照射スポットS2照射後も繰り返され、図3に示したような2次元の走査が進行する。
【0042】
図4(A)から(F)までの一連の動作を繰り返し、図3に示した患部41のある深さ方向の層について荷電粒子ビームを照射する。各照射スポットの照射線量、照射位置、それに対応した走査電磁石電源61A,61Bの励磁量は予め定められた治療計画に従い、その内容は治療開始前に治療計画装置67から中央制御装置65に送信され、照射制御装置64内のメモリ64Cに保存される。その内容に従い照射制御装置64は走査電磁石電源61A,61Bの励磁パターンを定め、また中央制御装置65では患部41を深さ方向に層状に分割した深さに対応するエネルギーを加速器制御装置66に送信し、該当するエネルギーでの運転を実施する。患部41の1層を照射完了した場合には、別の層に相当するエネルギーでの運転を実施するようエネルギー切り替え指示を送信する。これらを繰り返すことによって患部4全体の照射を完了する。
【0043】
ここで、図4(E)の区間C1の時間をtC1、図4(G)の区間B1の時間をtC2とすると、図4の場合にはtC1<tB1となっているため、照射スポットS1のOFFから次の照射スポットS2のONに至るまでの時間は区間B1の長さで決まっている。
【0044】
また、ビーム位置・幅の演算後の許容値判定するタイミングT1は走査中状態ONを示す区間B1内で生じているため、判定の結果許容値外となった場合には次の照射スポットS2の照射開始前にビーム停止となる。以降照射スポットS2、S3についても同様である。
【0045】
次に、ビーム位置・幅判定時間tC1と走査中時間tB1の時間の大小が逆転する、すなわちtC1>tB1となる場合を考える。こういったケースは図3に示した照射スポットの間隔を狭めてより高精細な照射を実施する場合、走査電磁石電源の性能を向上させより短時間で大きな励磁量を変更できるようにした場合、あるいはより高精度なビーム位置・幅の計測を実施するためにビーム位置計測装置のワイヤーすなわち測定チャンネルを増やし演算に用いるチャンネル数が増加、もしくは計算が複雑化したりする場合に、発生し得る。
【0046】
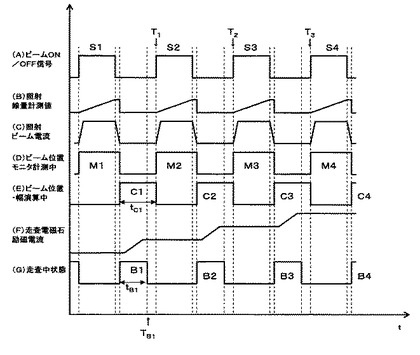
従来のディスクリートスポットスキャン方式による図4と同様なタイミングチャートを、ビーム位置・幅判定時間tC1が走査中時間tB1の時間よりも大きくなった場合について図5に示す。図5(A)から(G)までの縦軸は図4と同様である。従来のディスクリートスポットスキャン方式では、照射スポットへの荷電粒子ビーム照射後には図5(E)に示すビーム位置・演算がOFFする、すなわち判定が完了するまで次の照射スポットの照射には移行しない。したがって、照射スポットS1の照射後図5のタイミングT1まで経過してから次の照射スポットS2に移行していた。
【0047】
この場合、高精細な照射のために照射スポットの間隔を狭めても、あるいは走査電磁石用電源の性能を向上させて走査速度を向上させても、全体の照射時間が短縮できない。またビーム位置・幅の演算速度を向上させて図4の状況に戻すためには、その向上のための高価かつ複雑な演算装置が必要となる。
【0048】
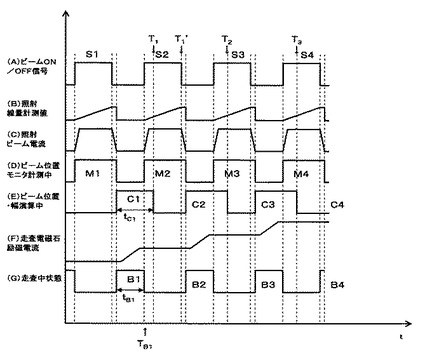
これを解決する本実施形態の動作を図6のタイミングチャートを用いて説明する。図6(A)から(G)までの縦軸は図4と同様である。
【0049】
図6に示した通り、図5と同様にビーム位置・幅判定時間tC1が走査中時間tB1の時間よりも大きくなっている。しかしながら図6(E)のビーム位置・幅の判定中に次の照射スポットの照射を開始している。以下図6を用いて動作を説明する。
【0050】
図6(A),(B),(C),(D)の動作は図4と同様で、図6(D)の区間C1で測定した信号を基に図6(E)の区間C1でビーム位置・幅の演算を実施する。
【0051】
一方、図6(F),(G)に示す通り走査電磁石の走査中状態ONを表す区間B1が判定完了より前にOFFしている。図5に示した動作では区間C1のOFF後に次の照射スポットS2の照射を開始しているが、本発明では走査中状態ONが完了するとともに次照射スポットS2の照射を開始する。
【0052】
したがって、図6(E)に示すビーム位置・幅演算に対応する区間C1の完了判定タイミングT1は次の照射スポットS2の照射中に発生する。ここで、好ましくは、ビーム位置・幅の演算結果が予め定められた許容値を逸脱しビームを停止する要求が発生しても、直ちにはビームの照射を停止せず照射スポットS2の照射完了を待ってタイミングT1‘にて照射スポットに対する照射の進行を停止する動作とする。これは照射スポットS2に対する照射を途中で中断した場合、その照射により生じる線量モニタ53A及び照射線量計測装置53Bやビーム位置モニタ52A及びビーム位置計測装置52Bでの信号出力が不足し、計測が不正確となるのを防止するためである。この場合、照射スポットS1と照射スポットS2の照射量の和が、照射スポットS1の判定結果が万が一異常があった場合にはビーム停止に至るまでの照射となるため、その和が予め定められた既定量未満となるようにする。例えばその照射線量(規定量)は、その照射が及ぼす線量分布全体への寄与が軽微となる基準から定めておくとよい。
【0053】
あるいは、図6(E)に示すビーム位置・幅演算に対応する区間C1の完了判定タイミングT1が照射スポットS2照射中に発生した場合に直ちにビーム停止信号を発生させてビーム停止してもよい。
【0054】
この動作により、高精細な照射のために照射スポットの間隔を狭める、あるいは走査電磁石用電点の性能を向上させて走査速度を向上させたことによる照射スポット間走査時間の短縮によってビーム位置・幅判定時間tC1が走査中時間tB1の時間よりも大きくなったtC1>tB1となる場合についても、照射時間の短縮が実現可能となる。
【0055】
またより高精度なビーム位置・幅の計測を実施するためにビーム位置モニタ52Aのワイヤーすなわち測定チャンネルを増やし演算に用いるチャンネル数が増加、もしくは計算が複雑化した場合でも、その演算時間が長くなることによる照射時間の伸長を抑制可能となる。
【0056】
また本発明の動作では、図3に示したような照射スポットにおいてそれらの間隔が飛び飛びになり距離が長くなった場合には走査中時間が延びる。その場合ビーム位置・幅判定時間tC1が走査中時間tB1の時間よりも小さい、すなわちtC1<tB1となる場合には、図4と同様の動作となる。
【0057】
次に図7には、本発明において照射スポットの照射線量が小さくスポットへの照射時間が短い場合のタイムチャートを示す。図7(A),(B),(C),(D)の動作は図4と同様で、図6(D)の区間M1で測定した信号を基に図6(E)の区間C1でビーム位置・幅の演算を実施する。図7では照射スポットS2の照射量が小さく照射時間が短いため、演算時間tC1が照射スポットS1からS2までの走査中時間tB1、スポットS2の照射に対応したビーム位置計測時間tM2、スポットS2からS3への走査中時間tB2の合計よりも長くなっている。図7の例は、照射スポットS1の判定終了までに照射してよい照射線量として予め定められた既定値が照射スポットS1とS2の照射量の和よりは大きく照射スポットS1、S2とS3の照射量の和よりも小さい場合で、図7(E)の判定区間C1完了後のタイミングT1まで照射スポットS3の照射を開始しない。
【0058】
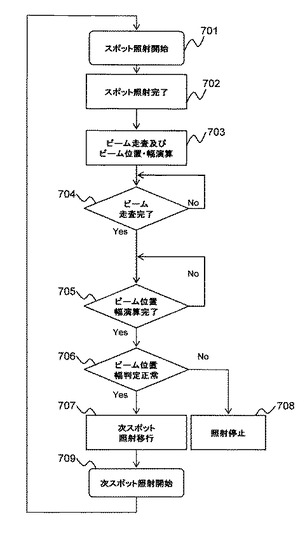
図8は、図4及び図5のタイムチャートに示した本発明を適用しない場合の比較例の動作を実現するフローチャートであり、図4は前述の通りビーム位置・幅判定時間tC1と走査中時間tB1の時間の関係がtC1<tB1となる場合、図5はtC1>tB1となる場合である。
【0059】
図8のフローチャートでは、ステップ701で照射開始し、ビームOFFの時間まで含めてステップ702で照射完了後ビーム走査及びビーム位置・幅の演算ステップ703に移行する。ステップ704でビーム走査完了になった時点でステップ705のビーム位置・幅の演算完了となっていればステップ706に移行する。ステップ706でビーム位置・幅の判定を行い正常であればステップ707の次スポット照射移行に進み、ステップ709の次スポット照射を開始し、異常であればステップ708に進み、照射停止となる。
【0060】
図8のフローチャートでは、ビーム走査完了ステップ704とビーム位置・幅演算完了ステップ705の両者が成立しない限り次のスポットへ移行しないため、図5のtC1>tB1となる場合、すなわちビーム位置・幅判定時間が走査中時間よりも大きい場合には、スポット進行はビーム位置・幅判定時間経過後となる。
【0061】
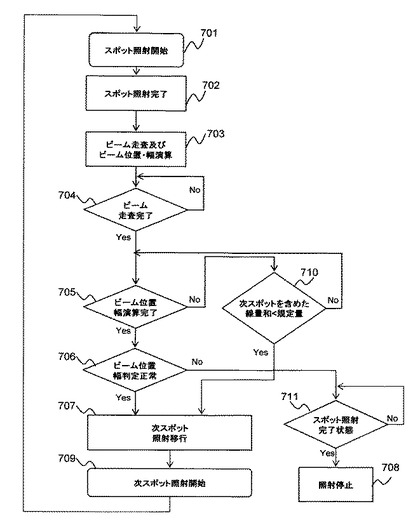
図9は、図4、図6及び図7のタイムチャートに示した、そのような問題を解決する本実施形態の動作を実現するフローチャートである。照射制御装置64には図9のフローチャートに対応するプログラムが格納されており、スポット進行判定部64Fがそのプログラムに基づいて図9のフローチャートの処理を実行する。
【0062】
図9のフローチャートでは、ビーム位置幅演算完了を判定するステップ705までは図8と同様に進行した後、ビーム走査完了の条件下でビーム位置幅演算が完了していない場合にステップ710に進む。
【0063】
ステップ710では、スポット照射開始以降、ステップ704のビーム走査完了の時点までの照射線量と、ビーム走査完了の時点での次のスポットの照射線量の和(次スポットを含めた線量和)が予め定められた既定量に達していない(次スポットを含めた線量和<規定量)かどうかを判定する。そして、この判定が肯定されればステップ707の次スポット照射移行に進み、ステップ709の次スポット照射開始へ進む。
【0064】
ここで、各スポットの目標線量は治療計画で予め設定され、治療開始前に治療計画装置67から中央制御装置65に送信され、照射制御装置64内のメモリ64Cに保存されている。スポットS1の照射線量は治療計画で予め設定されメモリ64Cに保存された目標線量であってもよい。スポットS2の線量は治療計画で予め設定されメモリ64Cに保存された目標線量である。
【0065】
ステップ710の判定における線量の関係を図6を用いて説明する。
【0066】
スポット照射開始以降ビーム走査完了の時点TB1までの照射線量であるスポットS1の照射線量(計測値)と、ビーム走査完了の時点TB1での次のスポットであるスポットS2の線量の和が既定量を超えているかどうかを判定し、超えていなければ、ステップ710の判定が肯定され、次スポット照射、すなわちスポットS2の照射に移行する。
【0067】
スポットS2の照射中にビーム位置・幅演算完了ステップ705が成立した後、ステップ706でビーム位置幅判定が異常となった場合には、ステップ711にてスポット照射が完了している状態かどうかを判定し、完了状態であれば照射停止ステップ708に移行、照射中の状態であれば照射完了を待つ。これにより、図6(E)のビーム位置幅演算中C1が終了するタイミングT1で異常が発生した場合であってもスポットS2を照射完了してからビーム停止する動作となる。
【0068】
図7は、スポットS1の判定中に複数スポットを照射する場合である。スポットS2の照射と2度目のビーム走査を完了し、ステップ710まで進行後、スポット照射開始以降、2度目のビーム走査完了の時点TB2までの照射線量である、図7中のスポットS1、S2の線量と、2度目のビーム走査完了の時点TB2での次のスポットであるスポットS3の線量の和が既定量を超えているかどうかを判定し、超えているとステップ710にて判定した場合にステップ710の判定が否定され、ステップ705に戻る。そして、ステップ705のビーム位置演算完了とステップ706の位置・幅演算完了までスポットS3の照射開始を待つ動作となる。
【0069】
ここで、ステップ705でビーム位置・幅の演算が完了しておらず、ステップ710で次スポットを含めた線量和が予め定められた既定量に達している場合にステップ707の次スポット照射移行に進み、ステップ709の次スポット照射開始へ進むことは、各照射スポット照射後そのスポットに照射されたビームについてその位置や幅の判定のための演算を実施している間にも既定の照射線量を許容することを意味する。
【0070】
なお、図9のフローチャートで示す本実施形態を適用すれば、図4のようにビーム位置・幅判定時間tC1と走査中時間tB1の時間の関係がtC1<tB1となる場合はステップ704のビーム走査完了時点でステップ705のビーム位置・幅演算も完了しているので、図4の動作も実現可能である。
【0071】
以上のように本実施形態においては、照射制御装置64は、荷電粒子ビームの位置・幅を算出する演算中にも荷電粒子ビームを照射するよう荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御する。また、照射制御装置64は、1つのスポットに照射される荷電粒子ビームの位置・幅を算出する演算が完了する前であっても、荷電粒子ビームの走査が完了した場合は、そのビーム走査完了とともに次のスポットの照射を開始するよう荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御する。これによりディスクリートスポットスキャン方式によるビーム照射に際して、照射位置精度を担保し安全性を保つためのビーム照射位置・幅の演算と判定に要する時間が長くなった場合でも、ビーム位置演算のための非常に高速な装置を用いずに、照射位置精度を維持したまま照射時間を短縮することができる。
【0072】
また、照射制御装置64は、荷電粒子ビームの位置・幅の演算値が許容値を逸脱していると判定した時点で、あるスポットに荷電粒子ビームが照射されている場合は、そのスポットへの照射完了を待ってインターロック信号を出力し、荷電粒子ビーム発生装置200からの荷電粒子ビームの出射を停止するよう制御する。そして、1つのスポットへの荷電粒子ビームの照射開始以降、その後の荷電粒子ビームの走査完了の時点までの照射線量と、そのビーム走査完了の時点での次のスポットの照射線量の和が既定量未満であるときは、荷電粒子ビームの走査完了とともに次のスポットの照射を開始するが、照射線量の和が規定量を超えているときは、荷電粒子ビームの位置・幅を算出する演算が完了するまで、次のスポットの照射を開始しないよう荷電粒子ビーム発生装置200からの荷電粒子ビームの出射を制御する。これによりビーム位置・幅の判定によるビーム出射を停止させるインターロック信号が既定の照射線量内にて完了し、照射の精度を向上させ正常組織への照射を低減することができる。
【0073】
以上の通り本実施形態では、各照射スポット照射後そのスポットに照射されたビームについてその位置や幅の判定のための演算を実施している間にも荷電粒子ビームの照射を許容することで照射スポット間のビーム停止時間を短縮化可能となる。
【0074】
この効果を数値の例を示して図5及び図6を用いて示す。本発明を適用していない図5において図5(C)の照射電流がONとなっている各照射スポットのビームON時間tON(=ビーム位置計測時間)を4ms、図5(E)のビーム位置幅の演算時間tC1を3ms、図5(G)の走査中時間tB1を1.5msとすると、1つの照射スポットが進行するのに要する時間はtON+tC1で決まり7msとなる。一方、本発明を適用した図6では同じく1つの照射スポットが進行するのに要する時間はtON+tB1で決まり5.5ms7となって、1スポットあたり1.5msの時間短縮となる。例えば10cm四方の体積1リットルの立方体を照射するために必要な照射スポット数を10,000とすれば、本発明を適用していない図5では7ms×10,000スポットの70秒の照射時間に対し、本発明を適用した図6では5.5msx10,000スポットの55秒の照射時間となり、15秒の照射時間短縮化が見込まれる。本発明を用いずに同じ効果を得るには、ビーム位置幅の演算時間tC1を短縮するために照射制御装置の演算能力を向上させる必要があるが、本発明ではその必要はない。
<第2の実施の形態>
次に、図10及び図11を用いて本発明の第2の実施の形態による荷電粒子ビーム照射システムについて説明する。本実施形態のスポットスキャン法は、各照射スポットへ荷電粒子ビームを目標線量だけ照射した後、荷電粒子ビームを走査して照射スポットを変更する間にも荷電粒子ビームを照射する、いわゆるラスタースキャン方式によるものである。なお、本実施形態における荷電粒子ビーム照射システムの全体構成と照射制御装置の構成は図1及び図2に示したものと同様である。
【0075】
本実施の形態において、上述したラスタースキャン方式によるスポットスキャン照射制御は照射制御装置64が荷電粒子ビーム発生装置200からのビーム出射を制御することによって行う。
【0076】
ラスタースキャン方式では、ビームの照射を停止するのは図3に示した患部のある一層を照射中に照射スポット間の間隔が大きくなりその間に照射する線量が無視できなくなるような場合や、同じく図3に示したある1層を照射完了し別の深さの層に変更する、すなわち照射装置500に入射する荷電粒子ビームのエネルギーを変更する場合、また許容できないビーム停止要因が発生した場合となる。
【0077】
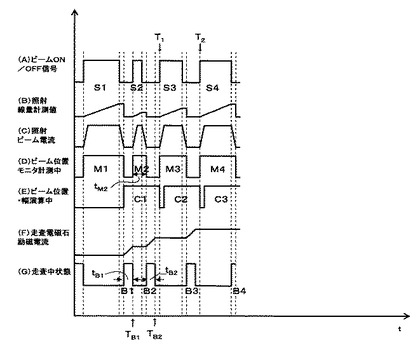
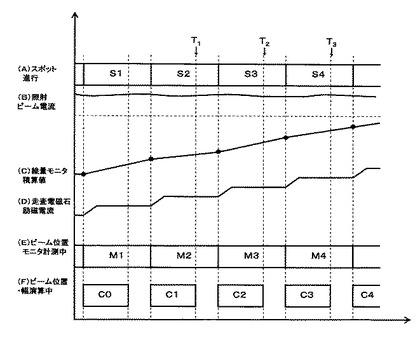
図10のタイムチャートは本実施形態による図3に示した患部内のある層を照射している間の動作を示す。
【0078】
図10において、横軸は時間tを示している。図10(A)の照射スポットの進行を示し、各区間S1、S2、S3、S4が各照射スポットへの照射区間を示す。
【0079】
図10(B)の縦軸は荷電粒子ビーム発生装置200から出射されビーム輸送系300を通じ照射装置500に入射する荷電粒子ビーム電流を示す。
図10(C)の縦軸は照射装置500内の線量モニタ53A及び照射線量計測装置53Bの計測線量の積算値を示す。
【0080】
図10(D)の縦軸は走査電磁石電源61Aあるいは61Bの励磁電流を示す。図10(C)に示した照射積算量が各スポットに予め定められた、計画線量に達すると同時にその照射スポットの照射を完了したこととし、次の照射スポットへの移動を開始する。したがって、照射スポットへの照射はまず走査電磁石励磁量変更中に行われ、その励磁量変更が終了した後計画された線量に達するまで走査電磁石51A又は51Bの励磁量変更を停止し、線量が計画値に達したと同時に次のスポットへ移行するための走査電磁石51A又は51Bの励磁電流を変更する、という動作を繰り返す。そして、それらの間にも荷電粒子ビームは照射され続ける。
【0081】
図10(E)の縦軸は各照射スポットでのビーム位置モニタ52A及びビーム位置計測装置52Bの計測状態を示し、上記の通り、走査中及び走査停止中の線量が既定値に達するまでの区間M1にビーム位置モニタ52A及びビーム位置計測装置52Bにて各照射スポットでのビーム位置の計測を行う。
【0082】
図10(F)の縦軸は各照射スポット照射完了後のビーム位置・幅の演算状態を示す。図10(E)に示したビーム位置計測装置の信号収集が完了した後、ビーム位置・幅演算部64Bは、その取得した信号を基にビーム位置や幅(標準偏差)を演算し、予め照射制御装置64のメモリ64Cに設定されている許容値と比較しビーム位置・幅の値が所望の誤差範囲内にあるかどうかを判定する。図10(F)の縦軸はそのビーム位置・幅の演算実施状態を示しており、例えば照射スポットS1に対応した区間S1の測定信号を用いた演算を区間C1にてビーム位置・幅演算部64Bが実施する。
【0083】
ここで、本実施形態では、図10に示す通り、各スポットの照射時間が(F)のビーム位置・幅演算時間より長い、すなわち例えば区間S2の時間が区間C1の時間より長い状態である必要があるため、スポット毎の照射量を照射電流で除すことによって得られる照射時間がビーム位置・幅演算時間よりも長くなるように各スポットの荷電粒子ビームの照射電流を予め定めておく必要がある。この照射ビーム電流の制御は、図1に点線で示すように、高周波電源26の出射用高周波の出力を調整することで可能となる。
【0084】
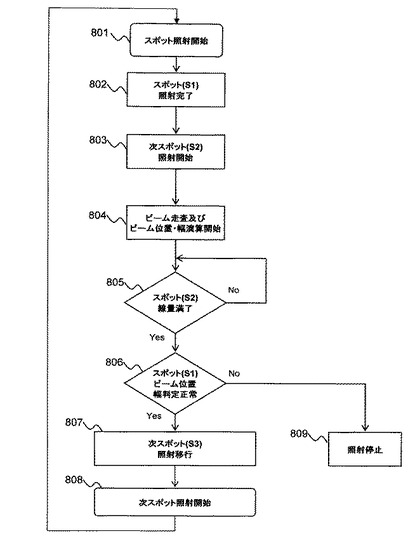
図11は、図10のタイムチャートに示した本実施形態の動作を実現するフローチャートである。図2に示した照射制御装置64には図11のフローチャートに対応するプログラムが格納されており、スポット進行判定部64Fがそのプログラムに基づいて図9のフローチャートの処理を実行する。図11のフローチャートを用いて、図10のタイムチャートに示したスポットS1の照射完了後の動作を代表して説明する。
【0085】
ステップ801で照射開始後のステップ802、スポットS1の照射完了後、前述の通り照射スポットを変更する間にも荷電粒子ビーム照射を続行するラスタースキャン方式のため、ステップ803の通り次スポットS2の照射を開始する。照射開始とともにステップ804のビーム走査、及びビーム位置・幅演算を開始する。
【0086】
スポットS2の線量満了まで照射を続け、ステップ805の線量満了判定が正となった時点でスポットS1のビーム位置幅判定806が正常であればステップ807次スポット(S3)照射に移行する。ステップ806のビーム位置判定が異常となった場合にはステップ809の照射停止に移行する。
【0087】
ここで、ステップ805の線量満了時点でステップ806のビーム位置・幅判定を可能とするためには、スポットの照射時間、フローチャートの例で示せばスポットS2の照射時間がビーム位置・幅の演算時間(図8のC1に相当)よりも長くなることが必要である。そのために上述したように、スポットS2の計画照射量に対しスポット照射時間が長くなるように各スポットの荷電粒子ビーム照射電流が設定されている。この照射電流は事前に計算され、照射制御装置64のメモリ64Cに記憶されている。
【0088】
以上のように本実施形態では、照射制御装置64は、複数の照射スポットの各スポットにおける照射時間がビーム位置検出装置53Bからの信号に基づくビームの位置・幅の演算時間よりも長くなるように設定し、照射線量計測装置53Bで計測する1つのスポットの照射線量が目標線量に到達した後、次のスポットへの照射を開始するとともにビーム位置検出装置53Bからの信号に基づく荷電粒子ビームの位置・幅を算出する演算を開始する。また、照射制御装置64は、複数の照射スポットの各スポットにおける照射時間がビーム位置検出装置53Bからの信号に基づくビームの位置・幅の演算時間よりも長くなるように各スポットの荷電粒子ビームの照射電流を制御する。
【0089】
これにより本実施形態では、各照射スポット照射終了後にそのスポットに照射されたビームについて、そのビーム位置や幅の判定のための演算を実施している間にも荷電粒子ビームの照射を許容するため、ラスタースキャン方式であっても各照射スポットのビーム位置や幅の判定を実施可能となる。
【符号の説明】
【0090】
20 シンクロトロン
21 前段加速器
22 偏向電磁石
23 加速装置
24 出射装置
25 出射用スイッチ
26 高周波電源
31 偏向電磁石
4 患者
41 患部
42 線量区画(照射スポット)
43 照射経路
51A,51B 走査電磁石
52A ビーム位置モニタ
52B ビーム位置計測装置
53A 線量モニタ
53B 照射線量計測装置
61A,61B 走査電磁石電源
62 走査電磁石電源制御装置
64 照射制御装置
64A モニタ信号取得部
64B ビーム位置・幅演算部
64C メモリ
64D モニタ信号取得部
64E 照射線量演算部
64F スポット進行判定部
65 中央制御装置
66 加速器制御装置
67 治療計画装置
100 荷電粒子ビーム照射システム
200 荷電粒子ビーム発生装置
300 ビーム輸送系
400 治療室
500 照射装置
600 制御装置
【技術分野】
【0001】
本発明は、粒子線照射システムに係り、特に荷電粒子ビームを腫瘍等の患部に照射して治療する荷電粒子ビーム照射システムに関する。
【背景技術】
【0002】
癌などの患者の患部に陽子及び炭素イオン等のいずれかの荷電粒子ビーム(イオンビーム)を照射する治療方法が知られている。この治療に用いる粒子線照射システムは、荷電粒子ビーム発生装置、ビーム輸送系、及び照射装置を備えている。
【0003】
照射装置の照射方式としては、散乱体によってビームを広げた後に患部形状に合わせて切り出す散乱体方式や、細いビームを患部領域内に走査させるビーム走査方式が知られている(例えば、非特許文献1、2084〜2089頁参照)。
【0004】
ビーム走査方式を用いた粒子線照射システムにおいて、荷電粒子ビーム発生装置の加速器で加速された荷電粒子ビームは、ビーム輸送系を経て照射装置に達し、照射装置に備えられた走査用電磁石でビーム進行方向に垂直な面で走査され、照射装置から患者の患部に照射される。
【0005】
ビーム走査方式において一様な照射野分布を形成する方法としては、上記の細いビーム適切に散乱させた後に円形、らせん状、あるいはジグザグ状に走査するワブラー法が知られている(特許文献1参照)。この場合には形成された一様分布を患部形状に合わせて切り出す必要がある。
【0006】
一方、細いビームを患部形状に合致させる、また一様ではなく任意の線量分布を形成する方法としてはスポットスキャン法が知られている(例えば、非特許文献1、2089〜2090頁参照)。これは患部形状を微小な標的区画(照射スポット)に分割しその区画ごとに所望の照射線量を予め設定して照射するものである。
【0007】
スポットスキャン方式の照射装置では、走査電磁石の励磁電流を変化させてビームの走査面上位置(照射位置)を制御するが、荷電粒子発生装置全体のビーム位置再現性、安定性等の様々な要因によりビームの位置がずれる可能性がある。そこで、これに対応するために照射線量を測定する以外にビーム位置を検出するビーム位置モニタを設け、ビームが正しい位置に照射されているかを判定し、その誤差が所定の許容値範囲を大きい場合は異常と判定し、インターロック信号を出力し荷電粒子ビームの発生を停止する制御手段が提唱されている(例えば、特許文献2)。また、ビーム位置のより正確な把握のため照射装置内に複数のビーム位置モニタを設けて、ビームの位置だけではなくその角度まで算出し判定に用いる制御手段も提唱されている(例えば、特許文献3)。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許4158931号
【特許文献2】2005−296162号公報(段落[0049]等)
【特許文献3】2009−347号公報(段落[0056]等)
【非特許文献】
【0009】
【非特許文献1】「レビュー・オブ・サイエンティフィック・インスルメンツ(REVIEW OF SCIENTIFIC INSTRUMENTS)」,1993年8月,第64巻,p.2084〜2089
【非特許文献2】A. Smith, et al, “The M. D. Anderson proton therapy system”Med. Phys. Volume 36, Issue 9, pp. 4068-4083 2009
【発明の概要】
【発明が解決しようとする課題】
【0010】
スポットスキャン法において、将来ニーズとしてさらなる高精度な照射を目指し照射位置でのビーム径をより小さくする要求がある(例えば、非特許文献2)。一方、治療可能な患者数をなるべく増加させるための高線量率化の要求もある。ビーム径を小さくするとビーム位置の測定に要するモニタの高分解能化が必要となり、その演算のための時間がより長くなることが想定される。このように照射位置精度を担保し安全性を保つために実施されているビーム位置の測定及びその演算と判定の手段が複雑になるに従い、その時間が長期化し、スポットスキャン方式において必要な線量を照射するまでの時間内に占める増加して、照射時間が長くなる可能性がある。またその演算・判定時間の短縮化のためには演算用の回路や制御動作の高速化などが必要となる可能性がある。
【0011】
本発明の目的は、スポットスキャン法によるビーム照射に際して、照射位置精度を担保し安全性を保つためのビーム照射位置・幅の演算と判定に要する時間が長くなった場合でも、照射位置精度を維持したまま照射時間を短縮できる荷電粒子ビーム照射システムを提供することにある。
【課題を解決するための手段】
【0012】
上記目的を達成するために、本発明は、荷電粒子ビーム発生装置と、走査電磁石を有する照射装置と、照射線量計測装置と、ビーム位置計測装置とを備え、1つのスポットに照射される荷電粒子ビームの照射線量が目標線量に達したときに、走査電磁石の励磁電流を制御して荷電粒子ビームを走査し照射位置を次のスポットに変更する荷電粒子ビーム照射システムにおいて、荷電粒子ビーム位置検出装置からの信号に基づき、荷電粒子ビームの位置・幅を算出しかつこの荷電粒子ビームの位置・幅の演算値が許容値を逸脱しているかどうかの判定を行い、演算値が許容値を逸脱している場合にインターロック信号を出力し、荷電粒子ビーム発生装置からの荷電粒子ビームの出射を停止する制御装置を備え、この制御装置は、荷電粒子ビームの位置・幅を算出する演算中にも荷電粒子ビームを照射するよう前記荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御する。
【0013】
かかる構成により、照射位置精度を担保し安全性を保つためのビーム照射位置・幅の演算と判定を次のスポット(線量区画)の照射間にも実施できるため、その演算と判定に要する時間が長くなった場合でも照射時間を長くすることを避け、照射時間を短縮できる。
【0014】
また、本発明においては、制御装置は、荷電粒子ビームの位置・幅の演算値が許容値を逸脱していると判定した時点で、あるスポットに荷電粒子ビームが照射されている場合は、そのスポットへの照射完了を待って荷電粒子ビーム発生装置からの荷電粒子ビームの出射を停止する。これは照射中のスポットに対する照射を途中で中断した場合、その照射により生じる照射線量計測装置やビーム位置計測装置での信号出力が不足し、計測が不正確となるのを防止するためである。そして、本発明の制御装置は、1つのスポットへの荷電粒子ビームの照射開始以降、その後の荷電粒子ビームの走査完了の時点までの照射線量と、そのビーム走査完了の時点での次のスポットの照射線量の和が既定量未満であるときは、荷電粒子ビームの走査完了とともに次のスポットの照射を開始するが、照射線量の和が規定量を超えているときは、荷電粒子ビームの位置・幅を算出する演算が完了するまで、次のスポットの照射を開始しないよう荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御する。
【0015】
かかる構成により、ビーム位置・幅の判定によるビーム出射を停止させるインターロック信号が既定の照射線量内にて完了し、照射の精度を向上させ正常組織への照射を低減することができる。
【発明の効果】
【0016】
本発明によれば、スポットスキャン法によるビーム照射に際して、照射位置精度を担保し安全性を保つためのビーム照射位置・幅の演算と判定に要する時間が長くなった場合でも、ビーム位置演算のための非常に高速な装置を用いずに、照射位置精度を維持したまま照射時間を短縮することができる。
【図面の簡単な説明】
【0017】
【図1】本発明の好適な一実施形態(第1の実施形態)である荷電粒子ビーム照射システムの全体概略構成を表す図である。
【図2】本発明の好適な一実施形態である荷電粒子ビーム照射システムに用いる照射装置の構成を示す図である。
【図3】照射対象である患部の深さ方向の特定層を示す図である。
【図4】本発明の好適な一実施形態である荷電粒子ビーム照射システムによるスポットスキャン法の第1の例の動作を示すタイミングチャートである。
【図5】荷電粒子ビーム照射システムによるスポットスキャン法において走査時間を短縮化した状態で本発明を適用しない場合の動作を示すタイミングチャートである。
【図6】本発明の好適な一実施形態である荷電粒子ビーム照射システムによるスポットスキャン法において走査時間を短縮化した状態の第1の例の動作を示すタイミングチャートである。
【図7】本発明の好適な一実施形態である荷電粒子ビーム照射システムによるスポットスキャン法において走査時間を短縮化した状態でスポット照射線量を変えた場合の第1の例の動作を示すタイミングチャートである。
【図8】本発明を適用しない場合の図4と図5のタイムチャートの動作を実現するフローチャートである。
【図9】本発明の好適な一実施形態を適用した図4、図6及び図7のタイムチャートの動作を実現するフローチャートである。
【図10】本発明の好適な他の実施形態である荷電粒子ビーム照射システムによるスポットスキャン法の第2の例としてラスタースキャン法を適用した場合の動作を示すタイミングチャートである。
【図11】本発明の好適な他の実施形態を適用した図10のタイムチャートの動作を実現するフローチャートである。
【発明を実施するための形態】
【0018】
以下、本発明の好適な実施形態である荷電粒子ビーム照射システムについて、図面を参照して説明する。
<第1の実施形態>
図1は、本発明の第1の実施形態における荷電粒子ビーム照射システムの全体構成を示す概略図である。
【0019】
荷電粒子ビーム照射システム100は、荷電粒子ビーム発生装置200と、発生した荷電粒子ビームを治療室400まで導くビーム輸送系300と、治療室400で患者4の患部41(図2に記載)の形状に合わせて荷電粒子ビームを照射する照射装置500と、制御装置600とから構成される。
【0020】
荷電粒子ビーム発生装置200は、前段加速器21と、前段加速器21で予め加速した荷電粒子を所定のエネルギーまで加速したのち出射するシンクロトロン20とを有する。(なお、このシンクロトロンに代えて、例えばサイクロトロン等のような前段加速器を有しない加速器を用いてもよい。)
シンクロトロン20は、荷電粒子ビームを周回させるための複数の偏向電磁石22及び複数の四極電磁石(図示せず)と、周回する荷電粒子ビームを加速させる加速装置23と所定のエネルギーまで加速した荷電粒子ビームを出射する出射装置24を有する。
【0021】
出射装置24は、出射用高周波印加電極(図示せず)を有し、この高周波印加電極が出射用スイッチ25を介して高周波電源26に接続されており、出射用スイッチ25の開閉により荷電粒子ビームの出射をON/OFFする。
【0022】
ビーム輸送系300は、複数の偏向電磁石31と複数の四極電磁石(図示せず)を有し、シンクロトロン20から出射された荷電粒子ビームを照射装置500に輸送するようになっている。
【0023】
ここで、図2を用いて本実施形態による荷電粒子ビーム照射システムに用いる照射装置500の構成について説明する。
【0024】
照射装置500は、ビーム輸送系300で導かれた荷電粒子ビームを水平(図中X方向)、垂直(紙面に垂直方向)に走査し患者4の患部41の形状に合致させるためのX方向走査電磁石51AとY方向走査電磁石51Bを有し、これらの走査電磁石51A,51Bは走査電磁石用電源61A,61Bとそれぞれ接続される。走査電磁石電源61A,61Bは電源制御装置62により制御される。走査電磁石51A,51Bにより偏向された荷電粒子ビームは、ビーム位置モニタ52A及び線量モニタ53Aを通過し、照射標的である患部41に照射される。ビーム位置モニタ52Aはビーム位置計測装置52Bに接続され、ビーム位置計測装置52Bは荷電粒子ビームの位置及び幅(広がり)を計測し、線量モニタ53Aは照射線量計測装置53Bに接続され、照射線量計測装置53Bは荷電粒子ビームの照射量を計測する。
【0025】
ビーム位置モニタ52AはX方向、Y方向それぞれに一定間隔ごとに並行にワイヤーが張られた電離箱構造となっている。ワイヤーには高電圧が印加されており、荷電粒子ビームがビーム位置モニタ52Aを通過するとビーム位置モニタ52A内の空気が電離されその電荷量は最も近いワイヤーに集められる。ビーム位置計測装置52Bは、各ワイヤー付近を通過して荷電粒子ビームの量に比例する信号をワイヤーより読みだすことで荷電粒子ビームの分布データを得ることが出来、ビーム位置すなわち分布の重心位置とビーム幅すなわち分布の標準偏差を算出することができる。なお、ビーム位置モニタ52Aにはワイヤーを張り信号を得るタイプ以外にも複数の電離箱を平面内に2次元に配置するタイプもありうる。
【0026】
図2は、照射制御装置64の処理機能も示しており、照射制御装置64は、信号取得部64A、ビーム位置・幅演算部64B、メモリ64C、信号取得部64D、照射線量演算部64Eからなるスポット進行判定部64Fを備えている。
【0027】
ここで、図2及び図3を用いてスポットスキャン法について説明する。図3は、荷電粒子ビームの上流側から患部41を見た説明図である。
【0028】
図2に示したように患者4の患部41に対して、その患部形状を3次元的な複数の深さ方向(図中Z方向)の層に分割し、各層をさらに図3に示すように、荷電粒子ビームの進行方向を横切る方向である水平方向(図中X−Y方向)に2次元的に分割して複数の線量区画42(以下照射スポット)を設定する。深さ方向は荷電粒子ビームの到達進度に対応しシンクロトロンから出射される荷電粒子ビームのエネルギー変更、あるいは照射装置500より上流でのエネルギー吸収体挿入などによる荷電粒子ビームのエネルギー変更により変更されて各層を選択的に照射する。各層内では図3に示す例えば43のような経路に沿って走査電磁石51A,51Bで荷電粒子ビームを2次元的に走査して各照射スポットに所定の線量を与える。各照射スポットに照射される荷電粒子ビームの量は線量モニタ53A及び照射線量計測装置53Bで計測され、荷電粒子ビームの位置やその広がり(幅)はビーム位置モニタ52A及びビーム位置計測装置52Bで計測される。
【0029】
上述したスポットスキャン照射制御は照射制御装置64によって行う。照射制御装置64は、複数の照射スポットのうちの1つのスポットに照射される荷電粒子ビームの照射線量が目標線量に達したときに、走査電磁石51A又は51Bの励磁電流を制御して荷電粒子ビームを走査し照射位置を次の照射スポットに変更する。また、本実施形態はいわゆるディスクリートスポットスキャン方式によるものであり、照射制御装置64は、1つのスポットに照射される荷電粒子ビームの照射線量が目標線量に達したときに、荷電粒子ビーム発生装置200からの荷電粒子ビームの出射を停止し、このビーム出射の停止状態で、走査電磁石51A又は51Bの励磁電流を制御して荷電粒子ビームを走査し照射位置を次の照射スポットに変更し、この変更後に、荷電粒子ビーム発生装置200からの荷電粒子ビームの出射を開始するよう制御する。
【0030】
また、照射制御装置64は、ビーム位置モニタ52A及びビーム位置計測装置52Bから得られた信号を照射制御装置64内の信号取得部64Aより読み出した後、ビーム位置・幅演算部64Bにてビーム位置とその幅を演算し、この荷電粒子ビームの位置・幅の演算値が許容値を逸脱しているかどうかを判定する。そして、荷電粒子ビームの位置・幅の演算値が許容値を逸脱している場合は中央制御装置65を介して加速器制御装置66にインターロック信号を出力し、荷電粒子ビーム発生装置200からの荷電粒子ビームの出射を停止する。
【0031】
ここで、より正確な位置や幅の測定のためにはビーム位置モニタ52Aは荷電粒子ビームの幅に対して十分小さい間隔のワイヤーを備えている必要があり、高精度な照射を目指して照射位置でのビーム径をより小さくした場合は、ビーム位置モニタ52Aに到達する荷電粒子ビームの幅が小さければ小さいほどそのワイヤー間間隔を小さくせざるを得ない。また照射可能な患部の大きさ、すなわち照射装置としての最大照射野サイズを大きくすればビーム位置モニタ52Aの測定可能な領域を大きくせざるを得ず、演算に用いる信号の数が大きくなる。このように演算に用いる信号の数が大きくなると、ビーム照射位置・幅の演算と判定に要する時間が長くなることが想定される。本実施の形態は、ビーム照射位置・幅の演算と判定に要する時間が長くなった場合でも、ビーム位置演算のための非常に高速な装置を用いずに、照射位置精度を維持したまま照射時間を短縮することができるようにしたものである。以下にその詳細を説明する。
【0032】
まず、図4のタイムチャートを用いて本実施形態の荷電粒子ビーム照射システムによるスポットスキャン法の第1の例の動作について説明する。この実施形態は、上述したように、照射スポットへ荷電粒子ビームを照射した後の照射スポット位置を変更する間には荷電粒子ビーム照射を照射しない、いわゆるディスクリートスポットスキャン方式によるものである。
【0033】
図4のタイムチャートは図3に示した患部内のある層を照射している間の動作を示す。
【0034】
図4において、横軸は時間tを示している。図4(A)の縦軸は照射制御装置64から中央制御装置65、加速器制御装置66を介し出射用スイッチ25に出力する開閉信号、すなわち荷電粒子ビームの出射を制御するビームON/OFF信号である。図4(A)に4つのON状態、すなわち4つの照射スポットがあるので、これらをそれぞれS1、S2、S3、S4とする。ここで、最初のビームON信号は、医師やセラピストが照射開始を指示した後、例えばシンクロトロン20のビーム入射、加速等のプロセスを経て、荷電粒子ビーム発生装置200のを含むシステム全体の動作準備が完了し、荷電粒子ビームが照射可能な状態になった時点で発生する。
【0035】
図4(B)の縦軸は照射された荷電粒子ビームの照射量を線量モニタ53A及び照射線量計測装置53Bで測定したもので、ビームONと同時に照射量が積算されていき、その計測信号は照射制御装置64の信号取得部64Dを介して照射線量演算部64Eに取り込まれる。照射線量演算部64Eは、積算線量が予め定められた量に達したところでビームOFFし、測定量を照射制御装置64のメモリ64Cにて記憶後、照射線量計測装置53Bはリセットされる。なおここでは線量モニタ53A及び照射線量計測装置53Bで計測される照射量を照射スポット毎にリセットするよう図示しているが、常に積算しその差分で照射量を判定してもよい。
【0036】
図4(C)は実際の荷電粒子ビームの照射電流を示しており、図4(B)で示した通り所定の線量に達してビームOFFとなった後にもOFFの反応時間があるため、微小な量の荷電粒子ビームが照射されることを示している。
【0037】
図4(D)の縦軸は図4(C)で示した照射ビームの位置・幅を測定するビーム位置モニタ52A及びビーム位置計測装置52Bの測定状態を示し、例えば照射スポットS1の計測、すなわちM1の区間での信号収集を照射制御装置64の信号取得部64Aが行う。図4(D)に示したビーム位置計測装置の信号収集が完了した後、ビーム位置・幅演算部64Bは、その取得した信号を基にビーム位置や幅(標準偏差)を演算し、予め照射制御装置64のメモリ64Cに設定されている許容値と比較しビーム位置・幅の値が所望の誤差範囲内にあるかどうかを判定する。図4(E)の縦軸はそのビーム位置・幅の演算実施状態を示しており、例えば照射スポットS1に対応した区間M1の測定信号を用いた演算を区間C1にてビーム位置・幅演算部64Bが実施する。
【0038】
ビーム位置・幅の演算結果が許容値を逸脱した場合には照射制御装置64がインターロック信号を発生し、次の照射スポットへの進行を停止させる。例えば照射スポットS1のビーム位置・幅演算結果が許容値を逸脱した場合には区間C1終了後、図4中のタイミングT1にて進行が停止する。
【0039】
図4(F)の縦軸は、図3に示したように荷電粒子を2次元的に走査する場合の走査電磁石電源61Aあるいは61Bの電流パターンを示している。このパターンは照射制御装置64において予め定められたパターンとなっており、各照射スポットでの照射線量が既定値に達し照射ビームが停止した後に順次励磁量を変更し、照射位置を変更する動作を示している。
【0040】
図4(G)の縦軸は走査電磁石電源61A又は61Bの状態を示し、励磁電流を変更して電流偏差が所望の範囲から逸脱している間は走査電磁石電源61A又は61BをON(以下走査中状態ONという)、例示電流の変更が完了し電流偏差が所望の範囲内に入ったことを判定した後に走査電磁石電源61A又は61BをOFF(以下走査中状態OFFという)する。すなわち、照射スポットS1に荷電粒子ビームを照射後に区間B1にて次の照射スポットへの照射位置変更を実施している。
【0041】
図4において、照射スポットS2の照射開始は照射スポットS1照射後の照射位置変更、すなわち図4(G)の走査中状態ONが完了したタイミングとなる。照射スポットS1完了後の流れが照射スポットS2照射後も繰り返され、図3に示したような2次元の走査が進行する。
【0042】
図4(A)から(F)までの一連の動作を繰り返し、図3に示した患部41のある深さ方向の層について荷電粒子ビームを照射する。各照射スポットの照射線量、照射位置、それに対応した走査電磁石電源61A,61Bの励磁量は予め定められた治療計画に従い、その内容は治療開始前に治療計画装置67から中央制御装置65に送信され、照射制御装置64内のメモリ64Cに保存される。その内容に従い照射制御装置64は走査電磁石電源61A,61Bの励磁パターンを定め、また中央制御装置65では患部41を深さ方向に層状に分割した深さに対応するエネルギーを加速器制御装置66に送信し、該当するエネルギーでの運転を実施する。患部41の1層を照射完了した場合には、別の層に相当するエネルギーでの運転を実施するようエネルギー切り替え指示を送信する。これらを繰り返すことによって患部4全体の照射を完了する。
【0043】
ここで、図4(E)の区間C1の時間をtC1、図4(G)の区間B1の時間をtC2とすると、図4の場合にはtC1<tB1となっているため、照射スポットS1のOFFから次の照射スポットS2のONに至るまでの時間は区間B1の長さで決まっている。
【0044】
また、ビーム位置・幅の演算後の許容値判定するタイミングT1は走査中状態ONを示す区間B1内で生じているため、判定の結果許容値外となった場合には次の照射スポットS2の照射開始前にビーム停止となる。以降照射スポットS2、S3についても同様である。
【0045】
次に、ビーム位置・幅判定時間tC1と走査中時間tB1の時間の大小が逆転する、すなわちtC1>tB1となる場合を考える。こういったケースは図3に示した照射スポットの間隔を狭めてより高精細な照射を実施する場合、走査電磁石電源の性能を向上させより短時間で大きな励磁量を変更できるようにした場合、あるいはより高精度なビーム位置・幅の計測を実施するためにビーム位置計測装置のワイヤーすなわち測定チャンネルを増やし演算に用いるチャンネル数が増加、もしくは計算が複雑化したりする場合に、発生し得る。
【0046】
従来のディスクリートスポットスキャン方式による図4と同様なタイミングチャートを、ビーム位置・幅判定時間tC1が走査中時間tB1の時間よりも大きくなった場合について図5に示す。図5(A)から(G)までの縦軸は図4と同様である。従来のディスクリートスポットスキャン方式では、照射スポットへの荷電粒子ビーム照射後には図5(E)に示すビーム位置・演算がOFFする、すなわち判定が完了するまで次の照射スポットの照射には移行しない。したがって、照射スポットS1の照射後図5のタイミングT1まで経過してから次の照射スポットS2に移行していた。
【0047】
この場合、高精細な照射のために照射スポットの間隔を狭めても、あるいは走査電磁石用電源の性能を向上させて走査速度を向上させても、全体の照射時間が短縮できない。またビーム位置・幅の演算速度を向上させて図4の状況に戻すためには、その向上のための高価かつ複雑な演算装置が必要となる。
【0048】
これを解決する本実施形態の動作を図6のタイミングチャートを用いて説明する。図6(A)から(G)までの縦軸は図4と同様である。
【0049】
図6に示した通り、図5と同様にビーム位置・幅判定時間tC1が走査中時間tB1の時間よりも大きくなっている。しかしながら図6(E)のビーム位置・幅の判定中に次の照射スポットの照射を開始している。以下図6を用いて動作を説明する。
【0050】
図6(A),(B),(C),(D)の動作は図4と同様で、図6(D)の区間C1で測定した信号を基に図6(E)の区間C1でビーム位置・幅の演算を実施する。
【0051】
一方、図6(F),(G)に示す通り走査電磁石の走査中状態ONを表す区間B1が判定完了より前にOFFしている。図5に示した動作では区間C1のOFF後に次の照射スポットS2の照射を開始しているが、本発明では走査中状態ONが完了するとともに次照射スポットS2の照射を開始する。
【0052】
したがって、図6(E)に示すビーム位置・幅演算に対応する区間C1の完了判定タイミングT1は次の照射スポットS2の照射中に発生する。ここで、好ましくは、ビーム位置・幅の演算結果が予め定められた許容値を逸脱しビームを停止する要求が発生しても、直ちにはビームの照射を停止せず照射スポットS2の照射完了を待ってタイミングT1‘にて照射スポットに対する照射の進行を停止する動作とする。これは照射スポットS2に対する照射を途中で中断した場合、その照射により生じる線量モニタ53A及び照射線量計測装置53Bやビーム位置モニタ52A及びビーム位置計測装置52Bでの信号出力が不足し、計測が不正確となるのを防止するためである。この場合、照射スポットS1と照射スポットS2の照射量の和が、照射スポットS1の判定結果が万が一異常があった場合にはビーム停止に至るまでの照射となるため、その和が予め定められた既定量未満となるようにする。例えばその照射線量(規定量)は、その照射が及ぼす線量分布全体への寄与が軽微となる基準から定めておくとよい。
【0053】
あるいは、図6(E)に示すビーム位置・幅演算に対応する区間C1の完了判定タイミングT1が照射スポットS2照射中に発生した場合に直ちにビーム停止信号を発生させてビーム停止してもよい。
【0054】
この動作により、高精細な照射のために照射スポットの間隔を狭める、あるいは走査電磁石用電点の性能を向上させて走査速度を向上させたことによる照射スポット間走査時間の短縮によってビーム位置・幅判定時間tC1が走査中時間tB1の時間よりも大きくなったtC1>tB1となる場合についても、照射時間の短縮が実現可能となる。
【0055】
またより高精度なビーム位置・幅の計測を実施するためにビーム位置モニタ52Aのワイヤーすなわち測定チャンネルを増やし演算に用いるチャンネル数が増加、もしくは計算が複雑化した場合でも、その演算時間が長くなることによる照射時間の伸長を抑制可能となる。
【0056】
また本発明の動作では、図3に示したような照射スポットにおいてそれらの間隔が飛び飛びになり距離が長くなった場合には走査中時間が延びる。その場合ビーム位置・幅判定時間tC1が走査中時間tB1の時間よりも小さい、すなわちtC1<tB1となる場合には、図4と同様の動作となる。
【0057】
次に図7には、本発明において照射スポットの照射線量が小さくスポットへの照射時間が短い場合のタイムチャートを示す。図7(A),(B),(C),(D)の動作は図4と同様で、図6(D)の区間M1で測定した信号を基に図6(E)の区間C1でビーム位置・幅の演算を実施する。図7では照射スポットS2の照射量が小さく照射時間が短いため、演算時間tC1が照射スポットS1からS2までの走査中時間tB1、スポットS2の照射に対応したビーム位置計測時間tM2、スポットS2からS3への走査中時間tB2の合計よりも長くなっている。図7の例は、照射スポットS1の判定終了までに照射してよい照射線量として予め定められた既定値が照射スポットS1とS2の照射量の和よりは大きく照射スポットS1、S2とS3の照射量の和よりも小さい場合で、図7(E)の判定区間C1完了後のタイミングT1まで照射スポットS3の照射を開始しない。
【0058】
図8は、図4及び図5のタイムチャートに示した本発明を適用しない場合の比較例の動作を実現するフローチャートであり、図4は前述の通りビーム位置・幅判定時間tC1と走査中時間tB1の時間の関係がtC1<tB1となる場合、図5はtC1>tB1となる場合である。
【0059】
図8のフローチャートでは、ステップ701で照射開始し、ビームOFFの時間まで含めてステップ702で照射完了後ビーム走査及びビーム位置・幅の演算ステップ703に移行する。ステップ704でビーム走査完了になった時点でステップ705のビーム位置・幅の演算完了となっていればステップ706に移行する。ステップ706でビーム位置・幅の判定を行い正常であればステップ707の次スポット照射移行に進み、ステップ709の次スポット照射を開始し、異常であればステップ708に進み、照射停止となる。
【0060】
図8のフローチャートでは、ビーム走査完了ステップ704とビーム位置・幅演算完了ステップ705の両者が成立しない限り次のスポットへ移行しないため、図5のtC1>tB1となる場合、すなわちビーム位置・幅判定時間が走査中時間よりも大きい場合には、スポット進行はビーム位置・幅判定時間経過後となる。
【0061】
図9は、図4、図6及び図7のタイムチャートに示した、そのような問題を解決する本実施形態の動作を実現するフローチャートである。照射制御装置64には図9のフローチャートに対応するプログラムが格納されており、スポット進行判定部64Fがそのプログラムに基づいて図9のフローチャートの処理を実行する。
【0062】
図9のフローチャートでは、ビーム位置幅演算完了を判定するステップ705までは図8と同様に進行した後、ビーム走査完了の条件下でビーム位置幅演算が完了していない場合にステップ710に進む。
【0063】
ステップ710では、スポット照射開始以降、ステップ704のビーム走査完了の時点までの照射線量と、ビーム走査完了の時点での次のスポットの照射線量の和(次スポットを含めた線量和)が予め定められた既定量に達していない(次スポットを含めた線量和<規定量)かどうかを判定する。そして、この判定が肯定されればステップ707の次スポット照射移行に進み、ステップ709の次スポット照射開始へ進む。
【0064】
ここで、各スポットの目標線量は治療計画で予め設定され、治療開始前に治療計画装置67から中央制御装置65に送信され、照射制御装置64内のメモリ64Cに保存されている。スポットS1の照射線量は治療計画で予め設定されメモリ64Cに保存された目標線量であってもよい。スポットS2の線量は治療計画で予め設定されメモリ64Cに保存された目標線量である。
【0065】
ステップ710の判定における線量の関係を図6を用いて説明する。
【0066】
スポット照射開始以降ビーム走査完了の時点TB1までの照射線量であるスポットS1の照射線量(計測値)と、ビーム走査完了の時点TB1での次のスポットであるスポットS2の線量の和が既定量を超えているかどうかを判定し、超えていなければ、ステップ710の判定が肯定され、次スポット照射、すなわちスポットS2の照射に移行する。
【0067】
スポットS2の照射中にビーム位置・幅演算完了ステップ705が成立した後、ステップ706でビーム位置幅判定が異常となった場合には、ステップ711にてスポット照射が完了している状態かどうかを判定し、完了状態であれば照射停止ステップ708に移行、照射中の状態であれば照射完了を待つ。これにより、図6(E)のビーム位置幅演算中C1が終了するタイミングT1で異常が発生した場合であってもスポットS2を照射完了してからビーム停止する動作となる。
【0068】
図7は、スポットS1の判定中に複数スポットを照射する場合である。スポットS2の照射と2度目のビーム走査を完了し、ステップ710まで進行後、スポット照射開始以降、2度目のビーム走査完了の時点TB2までの照射線量である、図7中のスポットS1、S2の線量と、2度目のビーム走査完了の時点TB2での次のスポットであるスポットS3の線量の和が既定量を超えているかどうかを判定し、超えているとステップ710にて判定した場合にステップ710の判定が否定され、ステップ705に戻る。そして、ステップ705のビーム位置演算完了とステップ706の位置・幅演算完了までスポットS3の照射開始を待つ動作となる。
【0069】
ここで、ステップ705でビーム位置・幅の演算が完了しておらず、ステップ710で次スポットを含めた線量和が予め定められた既定量に達している場合にステップ707の次スポット照射移行に進み、ステップ709の次スポット照射開始へ進むことは、各照射スポット照射後そのスポットに照射されたビームについてその位置や幅の判定のための演算を実施している間にも既定の照射線量を許容することを意味する。
【0070】
なお、図9のフローチャートで示す本実施形態を適用すれば、図4のようにビーム位置・幅判定時間tC1と走査中時間tB1の時間の関係がtC1<tB1となる場合はステップ704のビーム走査完了時点でステップ705のビーム位置・幅演算も完了しているので、図4の動作も実現可能である。
【0071】
以上のように本実施形態においては、照射制御装置64は、荷電粒子ビームの位置・幅を算出する演算中にも荷電粒子ビームを照射するよう荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御する。また、照射制御装置64は、1つのスポットに照射される荷電粒子ビームの位置・幅を算出する演算が完了する前であっても、荷電粒子ビームの走査が完了した場合は、そのビーム走査完了とともに次のスポットの照射を開始するよう荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御する。これによりディスクリートスポットスキャン方式によるビーム照射に際して、照射位置精度を担保し安全性を保つためのビーム照射位置・幅の演算と判定に要する時間が長くなった場合でも、ビーム位置演算のための非常に高速な装置を用いずに、照射位置精度を維持したまま照射時間を短縮することができる。
【0072】
また、照射制御装置64は、荷電粒子ビームの位置・幅の演算値が許容値を逸脱していると判定した時点で、あるスポットに荷電粒子ビームが照射されている場合は、そのスポットへの照射完了を待ってインターロック信号を出力し、荷電粒子ビーム発生装置200からの荷電粒子ビームの出射を停止するよう制御する。そして、1つのスポットへの荷電粒子ビームの照射開始以降、その後の荷電粒子ビームの走査完了の時点までの照射線量と、そのビーム走査完了の時点での次のスポットの照射線量の和が既定量未満であるときは、荷電粒子ビームの走査完了とともに次のスポットの照射を開始するが、照射線量の和が規定量を超えているときは、荷電粒子ビームの位置・幅を算出する演算が完了するまで、次のスポットの照射を開始しないよう荷電粒子ビーム発生装置200からの荷電粒子ビームの出射を制御する。これによりビーム位置・幅の判定によるビーム出射を停止させるインターロック信号が既定の照射線量内にて完了し、照射の精度を向上させ正常組織への照射を低減することができる。
【0073】
以上の通り本実施形態では、各照射スポット照射後そのスポットに照射されたビームについてその位置や幅の判定のための演算を実施している間にも荷電粒子ビームの照射を許容することで照射スポット間のビーム停止時間を短縮化可能となる。
【0074】
この効果を数値の例を示して図5及び図6を用いて示す。本発明を適用していない図5において図5(C)の照射電流がONとなっている各照射スポットのビームON時間tON(=ビーム位置計測時間)を4ms、図5(E)のビーム位置幅の演算時間tC1を3ms、図5(G)の走査中時間tB1を1.5msとすると、1つの照射スポットが進行するのに要する時間はtON+tC1で決まり7msとなる。一方、本発明を適用した図6では同じく1つの照射スポットが進行するのに要する時間はtON+tB1で決まり5.5ms7となって、1スポットあたり1.5msの時間短縮となる。例えば10cm四方の体積1リットルの立方体を照射するために必要な照射スポット数を10,000とすれば、本発明を適用していない図5では7ms×10,000スポットの70秒の照射時間に対し、本発明を適用した図6では5.5msx10,000スポットの55秒の照射時間となり、15秒の照射時間短縮化が見込まれる。本発明を用いずに同じ効果を得るには、ビーム位置幅の演算時間tC1を短縮するために照射制御装置の演算能力を向上させる必要があるが、本発明ではその必要はない。
<第2の実施の形態>
次に、図10及び図11を用いて本発明の第2の実施の形態による荷電粒子ビーム照射システムについて説明する。本実施形態のスポットスキャン法は、各照射スポットへ荷電粒子ビームを目標線量だけ照射した後、荷電粒子ビームを走査して照射スポットを変更する間にも荷電粒子ビームを照射する、いわゆるラスタースキャン方式によるものである。なお、本実施形態における荷電粒子ビーム照射システムの全体構成と照射制御装置の構成は図1及び図2に示したものと同様である。
【0075】
本実施の形態において、上述したラスタースキャン方式によるスポットスキャン照射制御は照射制御装置64が荷電粒子ビーム発生装置200からのビーム出射を制御することによって行う。
【0076】
ラスタースキャン方式では、ビームの照射を停止するのは図3に示した患部のある一層を照射中に照射スポット間の間隔が大きくなりその間に照射する線量が無視できなくなるような場合や、同じく図3に示したある1層を照射完了し別の深さの層に変更する、すなわち照射装置500に入射する荷電粒子ビームのエネルギーを変更する場合、また許容できないビーム停止要因が発生した場合となる。
【0077】
図10のタイムチャートは本実施形態による図3に示した患部内のある層を照射している間の動作を示す。
【0078】
図10において、横軸は時間tを示している。図10(A)の照射スポットの進行を示し、各区間S1、S2、S3、S4が各照射スポットへの照射区間を示す。
【0079】
図10(B)の縦軸は荷電粒子ビーム発生装置200から出射されビーム輸送系300を通じ照射装置500に入射する荷電粒子ビーム電流を示す。
図10(C)の縦軸は照射装置500内の線量モニタ53A及び照射線量計測装置53Bの計測線量の積算値を示す。
【0080】
図10(D)の縦軸は走査電磁石電源61Aあるいは61Bの励磁電流を示す。図10(C)に示した照射積算量が各スポットに予め定められた、計画線量に達すると同時にその照射スポットの照射を完了したこととし、次の照射スポットへの移動を開始する。したがって、照射スポットへの照射はまず走査電磁石励磁量変更中に行われ、その励磁量変更が終了した後計画された線量に達するまで走査電磁石51A又は51Bの励磁量変更を停止し、線量が計画値に達したと同時に次のスポットへ移行するための走査電磁石51A又は51Bの励磁電流を変更する、という動作を繰り返す。そして、それらの間にも荷電粒子ビームは照射され続ける。
【0081】
図10(E)の縦軸は各照射スポットでのビーム位置モニタ52A及びビーム位置計測装置52Bの計測状態を示し、上記の通り、走査中及び走査停止中の線量が既定値に達するまでの区間M1にビーム位置モニタ52A及びビーム位置計測装置52Bにて各照射スポットでのビーム位置の計測を行う。
【0082】
図10(F)の縦軸は各照射スポット照射完了後のビーム位置・幅の演算状態を示す。図10(E)に示したビーム位置計測装置の信号収集が完了した後、ビーム位置・幅演算部64Bは、その取得した信号を基にビーム位置や幅(標準偏差)を演算し、予め照射制御装置64のメモリ64Cに設定されている許容値と比較しビーム位置・幅の値が所望の誤差範囲内にあるかどうかを判定する。図10(F)の縦軸はそのビーム位置・幅の演算実施状態を示しており、例えば照射スポットS1に対応した区間S1の測定信号を用いた演算を区間C1にてビーム位置・幅演算部64Bが実施する。
【0083】
ここで、本実施形態では、図10に示す通り、各スポットの照射時間が(F)のビーム位置・幅演算時間より長い、すなわち例えば区間S2の時間が区間C1の時間より長い状態である必要があるため、スポット毎の照射量を照射電流で除すことによって得られる照射時間がビーム位置・幅演算時間よりも長くなるように各スポットの荷電粒子ビームの照射電流を予め定めておく必要がある。この照射ビーム電流の制御は、図1に点線で示すように、高周波電源26の出射用高周波の出力を調整することで可能となる。
【0084】
図11は、図10のタイムチャートに示した本実施形態の動作を実現するフローチャートである。図2に示した照射制御装置64には図11のフローチャートに対応するプログラムが格納されており、スポット進行判定部64Fがそのプログラムに基づいて図9のフローチャートの処理を実行する。図11のフローチャートを用いて、図10のタイムチャートに示したスポットS1の照射完了後の動作を代表して説明する。
【0085】
ステップ801で照射開始後のステップ802、スポットS1の照射完了後、前述の通り照射スポットを変更する間にも荷電粒子ビーム照射を続行するラスタースキャン方式のため、ステップ803の通り次スポットS2の照射を開始する。照射開始とともにステップ804のビーム走査、及びビーム位置・幅演算を開始する。
【0086】
スポットS2の線量満了まで照射を続け、ステップ805の線量満了判定が正となった時点でスポットS1のビーム位置幅判定806が正常であればステップ807次スポット(S3)照射に移行する。ステップ806のビーム位置判定が異常となった場合にはステップ809の照射停止に移行する。
【0087】
ここで、ステップ805の線量満了時点でステップ806のビーム位置・幅判定を可能とするためには、スポットの照射時間、フローチャートの例で示せばスポットS2の照射時間がビーム位置・幅の演算時間(図8のC1に相当)よりも長くなることが必要である。そのために上述したように、スポットS2の計画照射量に対しスポット照射時間が長くなるように各スポットの荷電粒子ビーム照射電流が設定されている。この照射電流は事前に計算され、照射制御装置64のメモリ64Cに記憶されている。
【0088】
以上のように本実施形態では、照射制御装置64は、複数の照射スポットの各スポットにおける照射時間がビーム位置検出装置53Bからの信号に基づくビームの位置・幅の演算時間よりも長くなるように設定し、照射線量計測装置53Bで計測する1つのスポットの照射線量が目標線量に到達した後、次のスポットへの照射を開始するとともにビーム位置検出装置53Bからの信号に基づく荷電粒子ビームの位置・幅を算出する演算を開始する。また、照射制御装置64は、複数の照射スポットの各スポットにおける照射時間がビーム位置検出装置53Bからの信号に基づくビームの位置・幅の演算時間よりも長くなるように各スポットの荷電粒子ビームの照射電流を制御する。
【0089】
これにより本実施形態では、各照射スポット照射終了後にそのスポットに照射されたビームについて、そのビーム位置や幅の判定のための演算を実施している間にも荷電粒子ビームの照射を許容するため、ラスタースキャン方式であっても各照射スポットのビーム位置や幅の判定を実施可能となる。
【符号の説明】
【0090】
20 シンクロトロン
21 前段加速器
22 偏向電磁石
23 加速装置
24 出射装置
25 出射用スイッチ
26 高周波電源
31 偏向電磁石
4 患者
41 患部
42 線量区画(照射スポット)
43 照射経路
51A,51B 走査電磁石
52A ビーム位置モニタ
52B ビーム位置計測装置
53A 線量モニタ
53B 照射線量計測装置
61A,61B 走査電磁石電源
62 走査電磁石電源制御装置
64 照射制御装置
64A モニタ信号取得部
64B ビーム位置・幅演算部
64C メモリ
64D モニタ信号取得部
64E 照射線量演算部
64F スポット進行判定部
65 中央制御装置
66 加速器制御装置
67 治療計画装置
100 荷電粒子ビーム照射システム
200 荷電粒子ビーム発生装置
300 ビーム輸送系
400 治療室
500 照射装置
600 制御装置
【特許請求の範囲】
【請求項1】
荷電粒子ビームを加速して出射する荷電粒子ビーム発生装置と、
前記荷電粒子ビーム発生装置から出射された荷電粒子ビームを偏向して走査面上で走査する走査電磁石を有する照射装置とを備え、
前記荷電粒子ビームの照射標的を前記荷電粒子ビームの進行方向を横切る方向に2次元的に分割してなる複数の照射スポットが設定され、
前記複数の照射スポットのうちの1つのスポットに照射される荷電粒子ビームの照射線量が目標線量に達したときに、前記走査電磁石の励磁電流を制御して前記荷電粒子ビームを走査し照射位置を次の照射スポットに変更する荷電粒子ビーム照射システムにおいて、
前記複数の照射スポットの各々に照射される荷電粒子ビームの線量を検出する照射線量計測装置と、
前記複数の照射スポットの各々に照射される荷電粒子ビームの位置・幅を検出するビーム位置計測装置と、
前記荷電粒子ビーム位置検出装置からの信号に基づき、前記荷電粒子ビームの位置・幅を算出し、この荷電粒子ビームの位置・幅の演算値が許容値を逸脱しているかどうかを判定し、前記荷電粒子ビームの位置・幅の演算値が許容値を逸脱している場合に前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射を停止する制御装置とを備え、
前記制御装置は、
前記荷電粒子ビームの位置・幅を算出する演算中にも前記荷電粒子ビームを照射するよう前記荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御することを特徴とする荷電粒子ビーム照射システム。
【請求項2】
請求項1記載の荷電粒子ビーム照射システムにおいて、
前記制御装置は、
前記1つのスポットに照射される荷電粒子ビームの照射線量が目標線量に達したときに、前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射を停止し、このビーム出射の停止状態で、前記走査電磁石の励磁電流を制御して前記荷電粒子ビームを走査し照射位置を次の照射スポットに変更し、この変更後に、前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射を開始するよう制御し、かつ
前記1つのスポットに照射される前記荷電粒子ビームの位置・幅を算出する演算が完了する前であっても、前記荷電粒子ビームの走査が完了した場合は、そのビーム走査完了とともに次のスポットの照射を開始するよう前記荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御することを特徴とする荷電粒子ビーム照射システム。
【請求項3】
請求項1記載の荷電粒子ビーム照射システムにおいて、
前記制御装置は、
前記1つのスポットに照射される荷電粒子ビームの照射線量が目標線量に達したときに、前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射を停止し、このビーム出射の停止状態で、前記走査電磁石の励磁電流を制御して前記荷電粒子ビームを走査し照射位置を次の照射スポットに変更し、この変更後に、前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射を開始するよう制御し、かつ
前記荷電粒子ビームの位置・幅の演算値が許容値を逸脱していると判定した時点で、あるスポットに前記荷電粒子ビームが照射されている場合は、そのスポットへの照射完了を待って前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射を停止し、かつ
前記1つのスポットへの前記荷電粒子ビームの照射開始以降、その後の前記荷電粒子ビームの走査完了の時点までの照射線量と、そのビーム走査完了の時点での次のスポットの照射線量の和が既定量未満であるときは、前記荷電粒子ビームの走査完了とともに次のスポットの照射を開始し、前記照射線量の和が前記規定量を超えているときは、前記荷電粒子ビームの位置・幅を算出する演算が完了するまで、次のスポットの照射を開始しないよう前記荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御することを特徴とする荷電粒子ビーム照射システム。
【請求項4】
請求項1記載の荷電粒子ビーム照射システムにおいて、
前記制御装置は、
前記1つのスポットに照射する前記荷電粒子ビームの線量が目標線量に達した後、前記荷電粒子ビームを走査して照射位置を次のスポットに変更する間にも前記荷電粒子ビームを照射するよう前記荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御し、
前記複数の照射スポットの各スポットにおける照射時間が前記ビーム位置検出装置からの信号に基づく前記ビームの位置・幅の演算時間よりも長くなるように設定し、
前記照射線量計測装置で計測する前記1つのスポットの照射線量が目標線量に到達した後、次のスポットへの照射を開始するとともに前記ビーム位置検出装置からの信号に基づく前記荷電粒子ビームの位置・幅を算出する演算を開始することを特徴とする荷電粒子ビーム照射システム。
【請求項5】
請求項1記載の荷電粒子ビーム照射システムにおいて、
前記制御装置は、
前記1つのスポットに照射する前記荷電粒子ビームの線量が目標線量に達した後、前記荷電粒子ビームを走査して照射位置を次のスポットに変更する間にも前記荷電粒子ビームを照射するよう前記荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御し、
前記複数の照射スポットの各スポットにおける照射時間が前記ビーム位置検出装置からの信号に基づく前記ビームの位置・幅の演算時間よりも長くなるように前記各スポットにおける荷電粒子ビームの照射電流を制御することを特徴とする荷電粒子ビーム照射システム。
【請求項1】
荷電粒子ビームを加速して出射する荷電粒子ビーム発生装置と、
前記荷電粒子ビーム発生装置から出射された荷電粒子ビームを偏向して走査面上で走査する走査電磁石を有する照射装置とを備え、
前記荷電粒子ビームの照射標的を前記荷電粒子ビームの進行方向を横切る方向に2次元的に分割してなる複数の照射スポットが設定され、
前記複数の照射スポットのうちの1つのスポットに照射される荷電粒子ビームの照射線量が目標線量に達したときに、前記走査電磁石の励磁電流を制御して前記荷電粒子ビームを走査し照射位置を次の照射スポットに変更する荷電粒子ビーム照射システムにおいて、
前記複数の照射スポットの各々に照射される荷電粒子ビームの線量を検出する照射線量計測装置と、
前記複数の照射スポットの各々に照射される荷電粒子ビームの位置・幅を検出するビーム位置計測装置と、
前記荷電粒子ビーム位置検出装置からの信号に基づき、前記荷電粒子ビームの位置・幅を算出し、この荷電粒子ビームの位置・幅の演算値が許容値を逸脱しているかどうかを判定し、前記荷電粒子ビームの位置・幅の演算値が許容値を逸脱している場合に前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射を停止する制御装置とを備え、
前記制御装置は、
前記荷電粒子ビームの位置・幅を算出する演算中にも前記荷電粒子ビームを照射するよう前記荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御することを特徴とする荷電粒子ビーム照射システム。
【請求項2】
請求項1記載の荷電粒子ビーム照射システムにおいて、
前記制御装置は、
前記1つのスポットに照射される荷電粒子ビームの照射線量が目標線量に達したときに、前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射を停止し、このビーム出射の停止状態で、前記走査電磁石の励磁電流を制御して前記荷電粒子ビームを走査し照射位置を次の照射スポットに変更し、この変更後に、前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射を開始するよう制御し、かつ
前記1つのスポットに照射される前記荷電粒子ビームの位置・幅を算出する演算が完了する前であっても、前記荷電粒子ビームの走査が完了した場合は、そのビーム走査完了とともに次のスポットの照射を開始するよう前記荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御することを特徴とする荷電粒子ビーム照射システム。
【請求項3】
請求項1記載の荷電粒子ビーム照射システムにおいて、
前記制御装置は、
前記1つのスポットに照射される荷電粒子ビームの照射線量が目標線量に達したときに、前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射を停止し、このビーム出射の停止状態で、前記走査電磁石の励磁電流を制御して前記荷電粒子ビームを走査し照射位置を次の照射スポットに変更し、この変更後に、前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射を開始するよう制御し、かつ
前記荷電粒子ビームの位置・幅の演算値が許容値を逸脱していると判定した時点で、あるスポットに前記荷電粒子ビームが照射されている場合は、そのスポットへの照射完了を待って前記荷電粒子ビーム発生装置からの前記荷電粒子ビームの出射を停止し、かつ
前記1つのスポットへの前記荷電粒子ビームの照射開始以降、その後の前記荷電粒子ビームの走査完了の時点までの照射線量と、そのビーム走査完了の時点での次のスポットの照射線量の和が既定量未満であるときは、前記荷電粒子ビームの走査完了とともに次のスポットの照射を開始し、前記照射線量の和が前記規定量を超えているときは、前記荷電粒子ビームの位置・幅を算出する演算が完了するまで、次のスポットの照射を開始しないよう前記荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御することを特徴とする荷電粒子ビーム照射システム。
【請求項4】
請求項1記載の荷電粒子ビーム照射システムにおいて、
前記制御装置は、
前記1つのスポットに照射する前記荷電粒子ビームの線量が目標線量に達した後、前記荷電粒子ビームを走査して照射位置を次のスポットに変更する間にも前記荷電粒子ビームを照射するよう前記荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御し、
前記複数の照射スポットの各スポットにおける照射時間が前記ビーム位置検出装置からの信号に基づく前記ビームの位置・幅の演算時間よりも長くなるように設定し、
前記照射線量計測装置で計測する前記1つのスポットの照射線量が目標線量に到達した後、次のスポットへの照射を開始するとともに前記ビーム位置検出装置からの信号に基づく前記荷電粒子ビームの位置・幅を算出する演算を開始することを特徴とする荷電粒子ビーム照射システム。
【請求項5】
請求項1記載の荷電粒子ビーム照射システムにおいて、
前記制御装置は、
前記1つのスポットに照射する前記荷電粒子ビームの線量が目標線量に達した後、前記荷電粒子ビームを走査して照射位置を次のスポットに変更する間にも前記荷電粒子ビームを照射するよう前記荷電粒子ビーム発生装置からの荷電粒子ビームの出射を制御し、
前記複数の照射スポットの各スポットにおける照射時間が前記ビーム位置検出装置からの信号に基づく前記ビームの位置・幅の演算時間よりも長くなるように前記各スポットにおける荷電粒子ビームの照射電流を制御することを特徴とする荷電粒子ビーム照射システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−177374(P2011−177374A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−45396(P2010−45396)
【出願日】平成22年3月2日(2010.3.2)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年3月2日(2010.3.2)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]