
記録装置、記録装置の制御方法、及び、プログラム
【課題】記録に係る動作を終了した後、次の記録に係る動作を実行させる制御コマンドの受信が開始されるまでの待機時間の実態に即して、休止動作移行時間を設定可能とする。
【解決手段】プリンター12は、記録処理が終了した後、制御コマンドの受信が開始される前に、休止動作移行時間が経過した場合、記録に係る動作を並行して実行できない休止動作を実行する休止動作実行部41と、記録が終了した後、制御コマンドの受信が開始されるまでの待機時間を計測して待機時間履歴データ50として記憶する計測時間記憶部42と、待機時間履歴データ50に基づいて、休止動作移行時間を設定する休止動作移行時間設定部43と、を備える。
【解決手段】プリンター12は、記録処理が終了した後、制御コマンドの受信が開始される前に、休止動作移行時間が経過した場合、記録に係る動作を並行して実行できない休止動作を実行する休止動作実行部41と、記録が終了した後、制御コマンドの受信が開始されるまでの待機時間を計測して待機時間履歴データ50として記憶する計測時間記憶部42と、待機時間履歴データ50に基づいて、休止動作移行時間を設定する休止動作移行時間設定部43と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、制御装置に接続可能な記録装置、当該記録装置の制御方法、及び、当該記録装置を制御するためのプログラムに関する。
【背景技術】
【0002】
従来、記録装置(画像形成装置)において、記録に係る動作の終了後、予め設定された休止動作移行時間の間、記録に係る動作が開始されなかった場合、所定の休止動作(例えば、スリープモードへ移行する動作)を実行するものが知られている(例えば、特許文献1参照)。
また、この種の記録装置と、ホストコンピューター等の制御装置とを備え、制御装置は記録装置に制御コマンドを出力し、記録装置は入力された制御コマンドに基づいて、記録に係る動作を行うシステムがある。当該システムでは、記録装置は、記録に係る動作を終了した後、次の記録に係る動作を実行させる制御コマンドの受信が開始される前に、休止動作移行時間が経過した場合、所定の休止動作を実行する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−145884号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上述したシステムにおいて、記録に係る動作を終了した後、次の記録に係る動作を実行させる制御コマンドの受信が開始されるまでの待機時間に比して、休止動作移行時間が短い傾向にあると、頻繁に休止動作に移行してしまい、これに起因してスループットが低下する可能性があるという問題がある。この問題を解決するため、待機時間に比して、休止動作移行時間を非常に長い値に設定すると、適切に休止動作に移行しない結果を招く可能性があるという問題があった。
本発明は、上述した事情に鑑みてなされたものであり記録に係る動作を終了した後、次の記録に係る動作を実行させる制御コマンドの受信が開始されるまでの待機時間の実態に即して、休止動作移行時間を設定可能とすることを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明は、制御装置に接続可能な記録装置であって、前記制御装置から、制御コマンドを受信する受信部と、前記受信部により受信した前記制御コマンドに基づいて記録を実行する記録実行部と、前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信される前に、休止動作移行時間が経過した場合、前記記録実行部による記録を行うための準備に係る動作を含む所定の動作を実行する休止動作へ移行する休止動作実行部と、前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信されるまでの待機時間を計測して記憶する計測時間記憶部と、前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、前記休止動作移行時間を設定する休止動作移行時間設定部と、を備えることを特徴とする。
この構成によれば、記録装置における過去の待機時間(記録が終了した後、制御コマンドが受信されるまでの時間)を反映して、休止動作移行時間が設定されることとなるため、記録装置における待機時間の実態に即して、休止動作移行時間を設定することが可能となる。
記録を行うための準備に係る動作を含む所定の動作には、例えば、記録ヘッドを記録可能とするためのメンテナンス等の動作や、記録媒体に適切に記録できる状態にするための動作、記録ヘッドや記録媒体、カッター、記録媒体の搬送手段などの状態の検査等がある。これら動作の実行中は、並行して記録媒体への記録を行うことができず、また、これら動作の中には、一旦開始すると、停止するまでに相当の時間を要するものがある。従って、休止動作移行時間が実態と乖離して極端に短い場合、休止動作へ頻繁に移行してしまい、連続して記録を行うことができなくなり、スループットの著しい低下を招く可能性がある。これを踏まえ、上記構成によれば、待機時間の実態に即して、休止動作移行時間が設定され、休止動作移行時間が実態と乖離して極端に短くなることを抑制でき、上記のようなスループットの著しい低下を効果的に抑制できる。
また、所定の動作には、一旦動作を停止すると、再開し、元の状態へ復帰するのに時間を要する動作を停止すること、が含まれている。ここで、記録を行わない待機時間の間、必要がない動作を停止させることにより、動作に係る構成要素の磨耗等を避けて長寿命化を図ることや、エネルギーの消費を抑えることができる。しかし、一旦停止すると元の状態に戻すのに時間の掛かる動作については、不必要に停止してしまうとスループットの低下の要因となり得る。そこで、次の制御コマンドが来る間隔を履歴により推測し、所定時間内であれば、一旦停止するなどの休止動作をすると元の状態に戻すのに時間の掛かる動作については停止させず、一方、停止しても元の状態に戻すのに時間が掛からない動作については停止している。このようにすれば、長寿命化と省エネルギーを図る一方、スループットの向上も図ることができる。
【0006】
また、上記発明の記録装置であって、本発明は、複数のノズルが形成された記録ヘッドを備え、前記所定の動作には、時間の経過に伴う前記ノズルにおけるインクの粘度の上昇を抑制する動作が含まれ、前記休止動作移行時間設定部は、前記休止動作移行時間を、少なくとも、前記記録実行部による記録が終了した後、前記ノズルにおけるインクの粘度の上昇を抑制する動作を実行しない時間として許容される時間とほぼ同じか、短い時間とすることを特徴とする。
この構成によれば、休止動作移行時間が、少なくとも、記録が終了した後、ノズルの乾きを抑制する動作を実行しない時間として許容される時間とほぼ同じか、短い時間となるため、記録が終了した後、ノズルの乾きを抑制する動作を実行しない時間として許容される時間を超えて、休止動作が開始されない、といった事態が生じることを防止できる。
すなわち、上記構成によれば、休止動作移行時間について、ノズルが記録に支障を与えるに至ることを回避できる範囲で、できるだけ長い時間を設定することができる。ノズルにおけるインクの粘度の上昇を抑制する動作とは、例えば、ノズルからのインクのフラッシングやノズルからのインクの吸引、ノズルへキャップを被せる動作などがある。これらの動作は、吐出したインクの処理が可能な特定の位置で実施するため、ヘッドを移動することなどが必要であり、また、ポンプなどは再起動するのに時間が掛かる。このため、頻繁に停止するとスループットが低下するが、上記構成によれば、スループットの低下が抑制できる。
【0007】
また、上記発明の記録装置であって、本発明は、記録媒体を搬送する搬送経路上に、前記記録媒体を吸引する吸引部を備え、前記所定の動作には、前記吸引部が前記記録媒体を吸引する動作が含まれることを特徴とする。
上記構成によれば、記録ヘッドと記録媒体の間の距離を一定に規定するため、搬送経路上に設けた吸引部(例えば、吸引プラテン)により記録媒体を吸引し、これにより、当該距離を調整する。吸引部に負圧を与えるポンプは、駆動すると元の負圧に戻るまで時間がかかり、再度記録できる状態に戻すのに時間が掛かる。このため、頻繁に停止するとスループットが低下するが、上記構成によれば、スループットの低下が抑制できる。
【0008】
また、上記発明の記録装置であって、本発明は、前記休止動作移行時間設定部は、前記休止動作移行時間の設定に際し、前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、直近の前記待機時間と、現時点で設定されている前記休止動作移行時間とを比較し、直近の前記待機時間の方が、現在設定されている前記休止動作移行時間よりも長い場合は、前記休止動作移行時間の値を、直近の前記待機時間の値に対応した値とすることを特徴とする。
ここで、次に発生すると考えられる待機時間は、直近の待機時間とある程度一致する傾向にあると考えられる。
これを踏まえ、上記構成によれば、直近の待機時間が、休止動作移行時間よりも長い場合は、休止動作移行時間の値が、直近の待機時間の値に対応した値となるため、休止動作移行時間が、次に発生する待機時間よりも短くなることを効果的に抑制することが可能となり、これにより、不必要に休止動作が実行されることを防止可能となる。
【0009】
また、上記発明の記録装置であって、本発明は、前記休止動作移行時間設定部は、前記休止動作移行時間の設定に際し、前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、以後の前記待機時間を予測し、予測した前記待機時間よりも、現時点で設定されている前記休止動作移行時間が長い場合は、予測した前記待機時間を下回らない範囲で、前記休止動作移行時間の値を短く設定することを特徴とする。
この構成によれば、予測した待機時間よりも、現時点で設定されている休止動作移行時間が長い場合は、予測した待機時間を下回らない範囲で、休止動作移行時間の値が短く設定されるため、休止動作移行時間が、今後発生する待機時間よりも極端に長くなるということを効果的に抑制することが可能となる。
【0010】
また、上記目的を達成するために、本発明は、制御装置に接続可能な記録装置の制御方法であって、前記制御装置から制御コマンドを受信して記録を実行し、当該記録が終了した後、次の前記制御コマンドが受信されるまでの待機時間を計測し、当該記録が終了した後、次の前記制御コマンドが受信される前に、休止動作移行時間が経過した場合、記録を行うための準備に係る動作を含む所定の動作を実行する休止動作へ移行し、前記待機時間の履歴に基づいて、休止動作移行時間を設定することを特徴とする。
この制御方法によれば、記録装置における過去の待機時間(記録が終了した後、制御コマンドが受信されるまでの時間)を反映して、休止動作移行時間が設定されることとなるため、記録装置における待機時間の実態に即して、休止動作移行時間を設定することが可能となる。
【0011】
また、上記目的を達成するために、本発明は、制御装置に接続可能であり、前記制御装置から、制御コマンドを受信する受信部を備える記録装置の各部を制御する制御部により実行されるプログラムであって、前記制御部を、前記受信部により受信した前記制御コマンドに基づいて記録を実行する記録実行部と、前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信される前に、休止動作移行時間が経過した場合、前記記録実行部による記録を行うための準備に係る動作を含む所定の動作を実行する休止動作へ移行する休止動作実行部と、前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信されるまでの待機時間を計測して記憶する計測時間記憶部と、前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、前記休止動作移行時間を設定する休止動作移行時間設定部と、として機能させることを特徴とする。
このプログラムを実行すれば、記録装置における過去の待機時間(記録が終了した後、制御コマンドが受信されるまでの時間)を反映して、休止動作移行時間が設定されることとなるため、記録装置における待機時間の実態に即して、休止動作移行時間を設定することが可能となる。
【発明の効果】
【0012】
本発明によれば、記録装置における待機時間の実態に即して、休止動作移行時間を設定可能となる。
【図面の簡単な説明】
【0013】
【図1】記録システムの機能的構成を示すブロック図である。
【図2】プリンターとホストコンピューターの処理のタイミングを示す図である。
【図3】プリンターの動作を示すフローチャートである。
【図4】プリンターとホストコンピューターの処理のタイミングを示す図である。
【図5】プリンターの動作を示すフローチャートである。
【発明を実施するための形態】
【0014】
以下、図面を参照して本発明の実施形態について説明する。
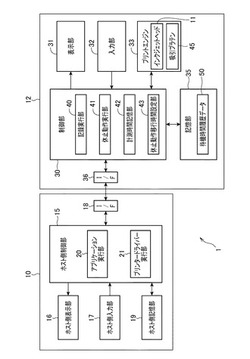
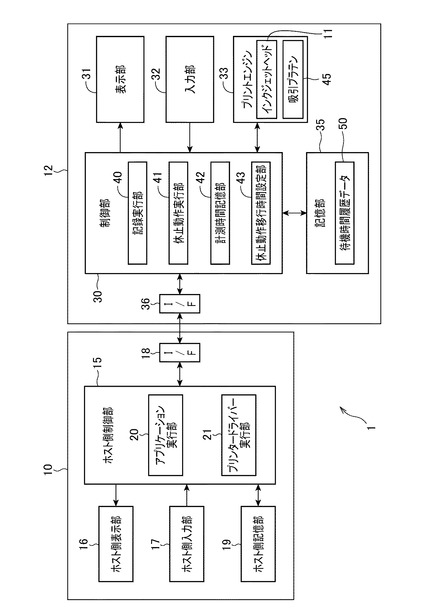
図1は、本実施形態に係る記録システム1の機能的構成を示すブロック図である。
記録システム1は、ホストコンピューター10(制御装置)と、プリンター12(記録装置)とを備え、ホストコンピューター10の制御の下、プリンター12により記録媒体に記録するシステムである。
【0015】
ホストコンピューター10は、ホスト側制御部15と、ホスト側表示部16と、ホスト側入力部17と、インターフェイス部18と、ホスト側記憶部19と、を備えている。
ホスト側制御部15は、ホストコンピューター10の各部を中枢的に制御するものであり、演算実行部としてのCPUや、このCPUに実行される基本制御プログラムや、この基本制御プログラムに係るデータ等を不揮発的に記憶するROM、CPUに実行されるプログラムやこのプログラムに係るデータ等を一時的に記憶するRAM、その他の周辺回路等を備えている。
図1に示すように、ホスト側制御部15は、アプリケーション実行部20と、プリンタードライバー実行部21と、を備えているが、これらについては後述する。
【0016】
ホスト側表示部16は、液晶ディスプレーパネルや、有機ELパネル等の表示パネルを備え、ホスト側制御部15の制御の下、表示パネルに各種情報を表示する。
ホスト側入力部17は、各種入力デバイスに接続され、これら入力デバイスに対する操作を検出し、ホスト側制御部15に出力する。
インターフェイス部18(I/F)は、ホスト側制御部15の制御の下、プリンター12との間で通信規格に準拠した通信を行う。
ホスト側記憶部19は、各種データを書き換え可能に記憶する部位であり、ハードディスクや、EEPROM等の記憶装置を備えている。ホスト側記憶部19には、少なくとも、プリンター12制御用のプリンタードライバーが記憶されている。
【0017】
一方、プリンター12は、インクジェットヘッド11(記録ヘッド)を備え、ホストコンピューター10の制御の下、このインクジェットヘッド11に形成されたノズルからインクを吐出して、記録媒体にドットを形成することにより、記録媒体に画像を記録するインクジェット式プリンターであり、制御部30と、表示部31と、入力部32と、プリントエンジン33と、記憶部35と、インターフェイス部36(I/F)を備えている。
制御部30は、上述したホスト側制御部15と同様、CPUや、ROM、RAM、その他の周辺回路を備え、プリンター12の各部を中枢的に制御する。制御部30は、日時(日付、時刻)を計時可能であると共に、経過時間の計測等、各種計時動作を実行可能である。
表示部31は、プリンター12の動作状態等の各種情報を表示する液晶パネルや有機ELパネル等の表示パネルや、LED等を備え、制御部30の制御の下、当該表示パネルに各種情報を表示し、又は、LEDの点灯/消灯する。
入力部32は、プリンター12に設けられた各種操作スイッチに接続され、操作スイッチに対する操作を検出し操作信号として制御部30に出力する。
プリントエンジン33は、制御部30の制御の下、各種センサーの検出値を監視しながら、上述したインクジェットヘッド11のほか、インクジェットヘッド11を走査方向に走査するためのキャリッジを駆動するためのキャリッジ駆動モーターや、記録媒体を搬送する搬送ローラーを駆動するための搬送モーター等を駆動して、記録媒体に画像を記録する。
プリントエンジン33は、吸引プラテン45(吸引部)を備えている。吸引プラテン45は、記録媒体の搬送経路上に設けられ、インクジェットヘッド11と、記録媒体との距離を一定に規定するため、記録媒体を吸引する。吸引プラテン45は、記録媒体に負圧を与えるためのポンプに接続されており、制御部30は、適宜、ポンプを駆動して吸引プラテン45により記録媒体を吸引し、インクジェットヘッド11と、記録媒体との距離を一定に規定する。
インターフェイス部36は、制御部30の制御の下、ホストコンピューター10との間で通信規格に準拠した通信を行う。インターフェイス部36と、制御部30とが協働して、受信部として機能する。
記憶部35は、EEPROMや、ハードディスク等の不揮発性メモリーを備え、各種データを書き換え可能に不揮発的に記憶する。記憶部35には、プリンター12の動作を制御するためのファームウェアが記憶される。
【0018】
次いで、アプリケーション実行部20及びプリンタードライバー実行部21の説明を通して、記録システム1が記録媒体に記録する際の基本的な動作について説明する。
アプリケーション実行部20は、ホストコンピューター10に予めインストールされたアプリケーションを実行することにより、記録媒体に記録すべき画像に係る各種情報が含まれた記録データを生成し、プリンタードライバー実行部21に出力する。
プリンタードライバー実行部21は、ホストコンピューター10に予めインストールされたプリンタードライバーを実行することにより、アプリケーション実行部20から入力された記録データに基づいて、プリンター12のコマンド仕様に対応した制御コマンドを生成し、インターフェイス部18により、プリンター12の制御部30に出力する。
この制御コマンドは、プリンター12に記録媒体への記録に係る一連の動作を実行させるためのコマンド群であり、搬送機構に記録媒体を搬送させるコマンドや、インクジェットヘッド11を駆動させるコマンド等が含まれている。
制御コマンドが入力された制御部30の記録実行部40は、この制御コマンドを読み出して実行することにより、プリントエンジン33を制御して、記録媒体に記録する。この記録実行部40の機能は、CPUがファームウェアを読み出して実行する等、ハードウェアとソフトウェアとの協働により実現される。
【0019】
図2は、記録媒体に記録を行う際の、プリンター12と、ホストコンピューター10とが実行する各種処理のタイミングの関係を説明するための図である。
図2において、軸xは、時間の流れを示す時間軸であり、図中左から右へ向かって時間が経過していく様子を示している。
また、図2(A)は、プリンター12が実行する各処理のタイミングを示し、一方、図2(B)は、ホストコンピューター10が実行する各処理のタイミングを示している。
図2では、ホストコンピューター10が、プリンター12に連続して2つのジョブ(ジョブA、及び、ジョブB)を実行させる場合を表している。
ジョブとは、記録媒体への記録に係る一連の処理を便宜的に表現するものであり、1つのジョブは、1つの記録媒体への記録に係る一連の処理に対応している。
記録媒体への記録に係る一連の処理とは、例えば、単票紙に記録する場合は、インクジェットヘッド11によりインクの吐出や、キャリッジによるインクジェットヘッド11の走査、搬送ローラーによる単票紙の搬送等を含む、1つの単票紙に記録を行うために実行される一連の処理のことである。また例えば、ロール紙等の連続紙に記録する場合は、連続して記録されることが想定された一群の画像(分離して描画される画像であってもよい)を記録するために実行される一連の処理(搬送や、記録、また、切断を伴う場合は切断等を含む処理)のことである。
以下の説明において、ホストコンピューター10からプリンター12にジョブを送信するとは、記録に係る一連の処理を実行させる制御コマンドを送信することであり、また、プリンター12がジョブを実行するとは、入力された制御コマンドに基づいて、記録に係る一連の処理を実行することである。
【0020】
図2に示すように、ホストコンピューター10において、タイミングTM1にて、アプリケーション実行部20、及び、プリンタードライバー実行部21が協働して、ジョブAに係る制御コマンド生成処理を開始し、タイミングTM2で終了する。この制御コマンド生成処理では、アプリケーション実行部20による記録データの生成、及び、プリンタードライバー実行部21による制御コマンドの生成が行われる。
次いで、タイミングTM2にて、ホストコンピューター10は、ジョブAに係る制御コマンド送信処理を開始し、タイミングTM3で終了する。この制御コマンド送信処理では、制御コマンド生成処理により生成された制御コマンドが、順次、プリンター12へ出力される。なお、制御コマンドは、通常、生成されたものから順次送信されるため、制御コマンド生成処理と、制御コマンド送信処理とでは、オーバーラップした部分が存在するが、説明の明確化のため、本実施形態では、制御コマンド生成処理の後に、制御コマンド送信処理が実行されるものとする。
ホストコンピューター10におけるジョブAに係る制御コマンド送信処理において、順次、制御コマンドが送信されるのに応じて、プリンター12は、ジョブAに係る制御コマンド受信処理(タイミングTM2−タイミングTM3)により、ジョブAに係る制御コマンドを、順次、受信する。この制御コマンド受信処理では、少なくとも、受信した制御コマンドを、順次、受信バッファーに格納する処理が行われる。
なお、制御コマンドの伝送に要する時間分、ホストコンピューター10における制御コマンド送信処理と、プリンター12における制御コマンド受信処理との開始、終了のタイミングには、若干のタイムラグが生じるものの、説明の明確化のため、このタイムラグは生じないものとする。
制御コマンド受信処理によってジョブAに係る制御コマンドを受信した後、プリンター12の記録実行部40は、タイミングTM3にてジョブAに係る記録処理を開始し、タイミングTM4にて終了する。記録処理とは、記録実行部40による制御コマンドに基づいた記録に係る一連の処理のことである。なお、通常、記録実行部40は、受信した制御コマンドを順次実行していくため、制御コマンド受信処理と、記録処理とでは、オーバーラップした部分が存在するが、説明の明確化のため、制御コマンド受信処理により全ての制御コマンドを受信した後に、記録処理が実行されるものとする。
【0021】
一方、ホストコンピューター10では、タイミングTM3にて、ジョブAに連続するジョブBに係る制御コマンド生成処理を実行し、タイミングTM5で終了した後、タイミングTM5にて、ジョブBに係る制御コマンド送信処理を実行し、タイミングTM6で終了する。つまり、連続するジョブについては、間隔を開けることなく、ジョブに係る処理が連続して実行される。
プリンター12では、このジョブBに係る制御コマンド送信処理に対応して、ジョブBに係る制御コマンド受信処理(タイミングTM5−タイミングTM6)を実行し、さらに、タイミングTM6にて、記録実行部40による記録を開始し、タイミングTM7にて、終了する。
【0022】
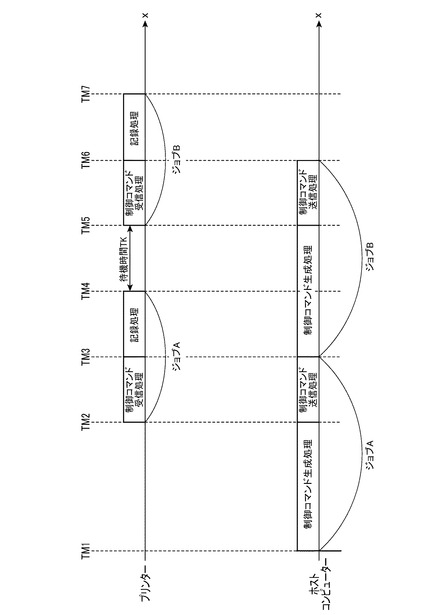
記録媒体に記録を行う場合、プリンター12、及び、ホストコンピューター10は、以上のようなタイミングで処理をするが、この場合、プリンター12において、ジョブAに係る記録処理が終了するタイミングTM4と、ジョブBに係る制御コマンド受信処理が開始するタイミングTM5との間には、ジョブに係る処理が何ら実行されない待機時間TKが発生する。
そして、本実施形態に係るプリンター12では、制御部30の休止動作実行部41は、当該待機時間TKと、休止動作移行時間KD(後述)とを利用した以下の処理を実行する。
【0023】
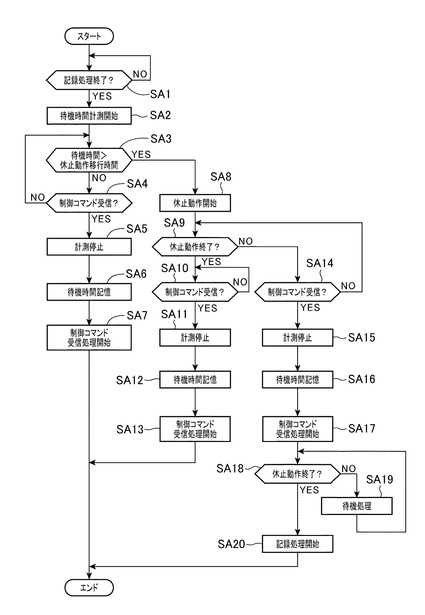
図3は、プリンター12の動作を示すフローチャートである。
以下の説明において、休止動作実行部41、及び、計測時間記憶部42の機能は、CPUがファームウェアを読み出して実行する等、ハードウェアとソフトウェアとの協働により実現される。
図3に示すように、休止動作実行部41は、記録実行部40による記録処理が終了したか否かを監視する(ステップSA1)。
記録実行部40による記録処理が終了した場合(ステップSA1:YES)、休止動作実行部41は、待機時間TKの計測を開始する(ステップSA2)。このステップSA2では、休止動作実行部41は、待機時間TKの計測を開始した日時(日付、時刻)を併せて取得する。上述したように、待機時間TKとは、1のジョブに係る記録処理が終了してから、次のジョブに係る制御コマンド受信処理が開始されるまでの経過時間のことである。
次いで、休止動作実行部41は、計測中の待機時間TKが、後述する方法により予め設定された休止動作移行時間KDを上回ったか否か監視しつつ(ステップSA3)、ホストコンピューター10から新たな制御コマンドの受信が開始されたか否か(ステップSA4)を監視する。
待機時間TKが休止動作移行時間KDを上回ることなく、ホストコンピューター10から新たな制御コマンドの受信が開始された場合(ステップSA4:YES)、休止動作実行部41は、ステップSA2で計測を開始した待機時間TKの計測を停止する(ステップSA5)。このステップSA5では、休止動作実行部41は、待機時間TKの計測を終了した日時(日付、時刻)を合わせて取得する。次いで、制御部30の計測時間記憶部42は、計測した待機時間TKについて、当該待機時間TKの計測を開始した日時(以下、「開始日時」という)、及び、計測を終了した日時(以下、「終了日時」という)と対応づけて、待機時間履歴データ50として、記憶部35に記憶する(ステップSA6)。
待機時間履歴データ50とは、計測された待機時間TKを、当該待機時間TKの開始日時、及び、終了日時と対応づけて記憶するデータである。待機時間履歴データ50では、過去に発生した待機時間TKのそれぞれについて、各待機時間TKと、各待機時間TKの開始日時、及び、終了日時とが対応づけて記憶されている。つまり、待機時間履歴データ50は、過去に発生した待機時間TKの履歴を示すデータである。
次いで、休止動作実行部41は、制御コマンド受信処理を開始する(ステップSA7)。
つまり、1のジョブに係る記録処理を実行した後、休止動作移行時間KDが経過する前に、次のジョブに係る制御コマンドの受信が開始された場合、休止動作実行部41は、休止動作(後述)へ移行することなく、制御コマンド受信処理を開始する。
【0024】
一方、計測中の待機時間TKが、休止動作移行時間KDを上回った場合(ステップSA3:YES)、休止動作実行部41は、休止動作を開始する(ステップSA8)。つまり、休止動作実行部41は、記録実行部40による1のジョブに係る記録処理が終了した後、次のジョブに係る制御コマンドの受信が開始される前に、休止動作移行時間KDが経過した場合、休止動作へ移行する。
休止動作へ移行している間は、記録を行うための準備に係る動作を含む所定の動作が実行される。
所定の動作とは、例えば、インクジェットヘッド11のメンテナンスに係る動作や、記録媒体に適切に記録できる状態にするための動作、インクジェットヘッド11や吸引プラテン45等の、プリントエンジン33の各種機構、装置に対する検査等が含まれている。
これら動作は、記録に係る各種機構、装置を利用して行われる動作であるため、休止動作へ移行している間は、並行して記録媒体への記録を行うことがでない。また、これら動作の中には、一旦開始すると、停止するまでに相当の時間を要するものがあるため、一旦、休止動作へ移行すると、記録媒体への記録を再開するまで相当の時間を要することとなる。例えば、所定の動作に含まれる「記録媒体に適切に記録できる状態するための動作」には、吸引プラテン45を利用したインクジェットヘッド11と記録媒体との距離の規定が含まれている。そして、吸引プラテン45に負圧を与えるポンプは、一旦、駆動すると元の負圧に戻るまで相当の時間を要する。
また、所定の動作には、一旦動作を停止すると、再開し、元の状態へ復帰するのに時間を要する動作を停止すること、が含まれている。例えば、各種モーターへの通電の停止等のハードウェア的な動作の停止や、所定のソフトウェア的な処理の停止等である。ここで、待機時間TKの間、必要がない動作を停止させることにより、動作に係る構成要素の磨耗等を避けて長寿命化を図ることや、エネルギーの消費を抑えることができる。しかし、一旦停止すると元の状態に戻すのに時間の掛かる動作については、不必要に停止してしまうとスループットの低下の要因となり得る。そこで、旦動作を停止すると、再開し、元の状態へ復帰するのに時間を要する動作については、記録処理の終了後、休止動作移行時間KDが経過して初めて実行する構成となっている。
【0025】
また、この休止動作では、少なくとも、クリーニング又はフラッシング、及び、キャッピングが行われる。
クリーニングとは、インクジェットヘッド11のノズルの内部に留まっているインクについて、時間の経過と共にインクの粘度が増加し、これに起因して吐出不良が起きることを防止するために、ノズルに留まっているインクを強制的に吸引する動作である。
クリーニング時、インクジェットヘッド11は、ホームポジション等の所定の位置に移動され、上面が開口した箱状のキャップ(不図示)に収容された上で、所定の手段によりノズルが形成された面に負圧が加えられ、この負圧によってノズルに留まっているインクがノズルから強制的に吸い出される。
また、フラッシングとは、ノズルにおけるインクの増粘を抑制するために実行される動作であり、インクジェットヘッド11が、ホームポジション等の所定の位置に移動され、記録媒体に吐出されない態様で、ノズル(全てのノズルであってもよく、使用頻度の低いノズルだけであってもよい)から所定回数、所定量のインクが吐出され、ノズルに留まっているインクが新たなインクに置き換えられる。
キャッピングとは、インクジェットヘッド11を、キャップ(不図示)に収納し、これによりノズルが露出していない状態とし、ノズルに留まっているインクの乾燥、及び、乾燥に伴う増粘を抑制する処理である。
なお、上記動作のほか、ノズルチェック処理(インクジェットヘッド11に形成された各ノズルについて吐出不良の発生の有無を検出する処理)を行うようにしてもよい。
【0026】
休止動作では、上述したように、記録に係る機構(例えば、インクジェットヘッド11)を使用するため、休止動作を実行中に、同時並行的にインクジェットヘッド11から記録媒体にインクを吐出して記録を行うことは不可能である。
また、休止動作では、インクジェットヘッド11を移動する動作、インクジェットヘッド11からインクを吐出する動作、キャップを駆動してインクジェットヘッド11をキャップに収容する動作等、複数の物理的な動作が連続して実行されるため、休止動作が開始されてから、終了するまでに相当の時間を要することとなる。
また、休止動作では、時間の経過に伴うノズルにおけるインクの粘度の上昇を抑制する動作であるクリーニング、又は、フラッシングが行われるが、本実施形態では、インクの粘度の上昇を効果的に抑制するという観点から、記録処理が終了した後、休止動作を実行しない時間として許容される時間である許容時間KYが予め定められている。
また、休止動作中であっても、制御コマンド受信処理は実行可能である。すなわち、休止動作中は、制御コマンド受信処理は並行して実行できる一方、記録実行部40による記録処理を並行して実行できない。
【0027】
ステップSA8において、休止動作を開始した後、休止動作実行部41は、休止動作が終了したか否かを監視する(ステップSA9)。
休止動作が終了した場合(ステップSA9:YES)、休止動作実行部41は、ホストコンピューター10から新たな制御コマンドの受信が開始されたか否かを監視し(ステップSA10)、受信が開始された場合(ステップSA10:YES)、待機時間TKの計測を停止し(ステップSA11)、計測時間記憶部42により待機時間TKを記憶部35に記憶し(ステップSA12)、制御コマンド受信処理を開始する(ステップSA13)。
一方、休止動作が終了していない場合(ステップSA9:NO)、休止動作実行部41は、ホストコンピューター10から新たな制御コマンドの受信が開始されたか否かを監視し(ステップSA14)、制御コマンドの受信が開始されていない場合(ステップSA14:NO)、処理手順をステップSA9へ移行し、引き続き、休止動作が終了したか否かを監視する。
ステップSA14において、ホストコンピューター10から新たな制御コマンドの受信が開始された場合(ステップSA14:YES)、休止動作実行部41は、待機時間TKの計測を停止し(ステップSA15)、計測時間記憶部42により待機時間TKを記憶部35に記憶し(ステップSA16)、制御コマンド受信処理を開始する(ステップSA17)。
次いで、休止動作実行部41は、休止動作が終了したか否かを監視し(ステップSA18)、終了していない場合(ステップSA18:NO)、待機処理を実行する(ステップSA19)。この待機処理とは、1のジョブに係る制御コマンド受信処理が終了した場合であっても、当該1のジョブに係る記録処理を待機する、という処理が行われる。すなわち、本実施形態では、休止動作が終了しない限り、記録処理が開始されない。
休止動作実行部41は、休止動作が終了するまで、待機処理を継続して実行する(ステップSA18、ステップSA19)。
休止動作が終了した場合(ステップSA18:YES)、休止動作実行部41は、既に制御コマンド受信処理が終了している場合は、記録実行部40による記録処理を開始し、また、制御コマンド受信処理が終了していない場合は、制御コマンド受信処理の終了後に、記録処理を開始する(ステップSA20)。
【0028】
以上のように、休止動作実行部41は、1のジョブに係る記録処理が終了した後、次のジョブに係る制御コマンドの受信が開始される前に、休止動作移行時間KDが到来した場合、休止動作を実行するが、これにより、以下のような問題点がある。
【0029】
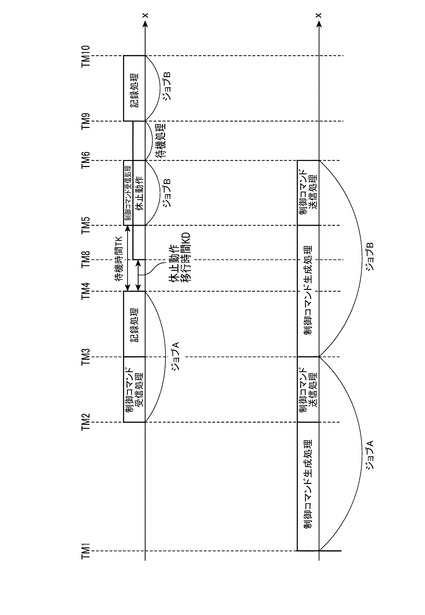
図4は、上述した場合におけるホストコンピューター10とプリンター12とが実行する各種処理のタイミングを示す図である。
図4に示すように、ジョブAに係る記録動作がタイミングTM4にて終了した後、ジョブBに係る制御コマンド受信処理が開始されるタイミングTM5の前に、休止動作移行時間KDがタイミングTM8で到来したとする。
この場合、休止動作実行部41は、タイミングTM8にて、休止動作の実行を開始する。上述したように、休止動作は、その開始から終了に至るまで相当の時間を要するが、図4の例では、制御コマンド受信処理が終了するタイミングTM6よりも後のタイミングTM9にて、休止動作が終了する。
上述したように、休止動作実行中は、制御コマンド受信処理は実行できるものの、記録処理は実行できないため、プリンター12は、休止動作が終了するまで、記録処理の開始を待機し、休止動作が終了するタイミングTM9にて、記録処理を開始し、タイミングTM10にて終了する。
この場合、タイミングTM6からタイミングTM9にいたる待機処理分、処理が終了するタイミングに遅延が生じる結果となる。
特に、ジョブAと、ジョブBとは、ホストコンピューター10がプリンター12に、連続して、実行させようとした処理であるが、待機時間TKよりも休止動作移行時間KDが短いことに起因して、このように連続してジョブを実行する場合、すなわち、一連のジョブの全てができるだけ早いタイミングで完了することが求められる場合に、処理が終了するタイミングに遅延が生じる結果となってしまう。
【0030】
この問題を解決するためには、休止動作移行時間KDを、できるだけ長く設定すればよい。これにより、休止動作移行時間KDが長ければ長いほど、待機時間TKよりも休止動作移行時間KDが短くなる確率を低減できるからである。
しかしながら、上述したように、休止動作は、ノズルにおけるインクの増粘を抑制する処理や、その他の検査処理、調整処理等が行われる。従って、連続してジョブを実行しない場合は、できるだけ早く、休止動作を実行したいとするニーズがある。
以上を踏まえ、本実施形態に係るプリンター12では、休止動作移行時間KDを以下の方法により動的に変更し、処理が終了するタイミングの遅延が発生することを抑制すると共に、休止動作移行時間KDが不必要に長くなることを抑制している。
【0031】
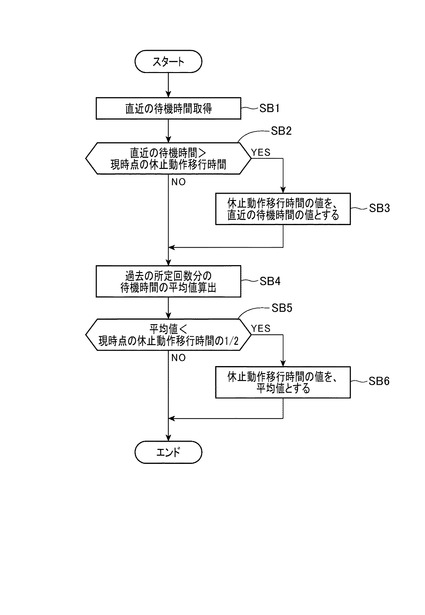
図5は、休止動作移行時間KDを設定する際の、プリンター12の動作を示すフローチャートである。
以下の説明において、休止動作移行時間設定部43の機能は、CPUがファームウェアを実行する等、ハードウェアとソフトウェアとの協働により実現される。
図5に示すように、まず、制御部30の休止動作移行時間設定部43は、記憶部35の待機時間履歴データ50を参照し、直近の待機時間TKを取得する(ステップSB1)。
そして、休止動作移行時間設定部43は、ステップSB1で取得した直近の待機時間TKの値の方が、現時点の休止動作移行時間KDの値よりも大きいか否かを判別する(ステップSB2)。
ステップSB1で取得した直近の待機時間TKの値の方が、現時点の休止動作移行時間KDの値よりも大きい場合、休止動作移行時間設定部43は、休止動作移行時間KDの値を、直近の待機時間TKの値へと変更する(ステップSB3)。なお、上述したように、記録処理が終了してから、許容時間KY内に休止動作を実行する必要があるため、休止動作移行時間設定部43は、少なくとも、休止動作移行時間KDを許容時間KYよりも短く設定する。具体的には、ステップSB1で取得した直近の待機時間TKの値の方が、現時点の休止動作移行時間KDの値よりも大きい場合であっても、待機時間TKが許容時間KYを上回っている場合は、許容時間KYを超えない範囲で予め設定された所定の上限値を、休止動作移行時間KDの値とする。
このステップSB3の処理は、以下の理由により実行される。
すなわち、直近に発生した待機時間TKと、次に発生する待機時間TKとは、ある程度一致する傾向にあると考えられる。なぜなら、待機時間TKの長さは、ホストコンピューター10における制御コマンド生成処理に要する時間の長さに応じて変化し、また、制御コマンド生成処理に要する時間の長さは、例えば、ホストコンピューター10の処理能力(CPUのパワーや、メモリーの大きさ)や、使用するアプリケーション、プリンタードライバー等によって変動する。そして、直近に待機時間TKが発生してから、次に待機時間TKが発生するまでの間に、ホストコンピューター10の処理能力や、使用するアプリケーション、プリンタードライバー等が変更されている可能性は低いと考えることができるからである。
そして、ステップSB1で取得した直近の待機時間TKの値の方が、現時点の休止動作移行時間KDの値よりも大きい場合、休止動作移行時間KDの値を、直近の待機時間TKの値へと変更することにより、休止動作移行時間KDが、次に発生すると予測される待機時間TKよりも短くなることを効果的に抑制することが可能となる。これにより、待機時間TKに比して、休止動作移行時間KDが不当に小さく、これに起因して、休止動作が頻繁に行われるといった事態が発生することを抑制できる。
さらに、ホストコンピューター10の処理能力や、使用するアプリケーション、プリンタードライバー等の変更等に起因して、以後発生する待機時間TKが長くなったとする。この場合であっても、待機時間TKの長時間化に対応して、休止動作移行時間KDの値が長くなることとなり、上述した変更後に休止動作が頻繁に行われるといった事態が発生することを抑制できる。
【0032】
続くステップSB4において、休止動作移行時間設定部43は、待機時間履歴データ50を参照して、過去の待機時間TKの履歴を取得し、直近に発生した待機時間TKから所定回数分、遡って発生した待機時間TKのそれぞれを取得し、これら待機時間TKの平均値を算出する(ステップSB4)。
例えば、休止動作移行時間設定部43は、直近に発生した待機時間TKも含め、過去の10回分の待機時間TKを取得し、これら待機時間TKの平均値を算出する。
次いで、休止動作移行時間設定部43は、ステップSB4で算出した平均値が、現時点の休止動作移行時間KDの1/2よりも小さいか否かを判別する(ステップSB5)。
ステップSB4で算出した平均値が、現時点の休止動作移行時間KDの1/2よりも小さい場合(ステップSA5:YES)、休止動作移行時間設定部43は、休止動作移行時間KDの値を、ステップSB4で算出した平均値へと変更する(ステップSB6)。
このステップSB4〜ステップSB6に至る処理は、以下のことを目的とした処理である。
すなわち、平均値は、過去に実際に発生した待機時間TKに基づいた、今後発生することが予測される待機時間TKの長さである、ということができる。
そして、平均値が、現時点の休止動作移行時間KDの1/2よりも小さい場合は、休止動作移行時間KDが、今後発生することが予測される待機時間TKの長さに比して、極端に大きい状態であると言える。
以上を踏まえ、ステップSB4〜ステップSB6では、休止動作移行時間設定部43は、現時点の休止動作移行時間KDの1/2よりも小さい場合(ステップSB5:YES)、休止動作移行時間KDが、今後発生することが予測される待機時間TKの長さに比して、極端に大きい状況であるものとして、休止動作移行時間KDと、今後発生することが予測される待機時間TKとの乖離を解消すべく、休止動作移行時間KDの値を、ステップSB4で算出した平均値へと変更する。
これにより、今後発生することが予測される待機時間TKに比して、休止動作移行時間KDが極端に長い状態が継続することが防止され、待機時間TKの実態を踏まえた上で、適切に、休止動作移行時間KDを短くすることができ、これにより、連続してジョブを実行しない場合は、できるだけ早く、休止動作を実行したいとするニーズに応えることが可能となる。
なお、ステップSB6では、休止動作移行時間KDの値を、ステップSB4で算出した平均値へと変更しているが、休止動作移行時間KDの値が、平均値よりも下回らない範囲で、休止動作移行時間KDを短くするようにすればよい。例えば、休止動作移行時間KDの値を、平均値と、現時点で設定されている休止動作移行時間KDとの中間の値と変更するようにしてもよい。なぜなら、平均値は、今後発生することが予測される待機時間TKであるが、休止動作移行時間KDを、平均値よりも低くすると、休止動作移行時間KDが予測される今後の待機時間TKよりも短くなり、不必要に休止動作が実行される結果を招くこととなるからである。不必要に休止動作が実行されるとは、例えば、1のジョブに係る記録処理が終了した後、当該1のジョブに連続する次のジョブに係る制御コマンド受信処理が開始される前に、休止動作が実行される場合のことである。
また、休止動作移行時間設定部43は、過去の待機時間TKの平均によって、今後の待機時間TKを予測していたが、他の統計学的手法を利用して待機時間TK1を予測してもよい。すなわち、待機時間履歴データ50に基づいて、待機時間TK1の履歴を反映して待機時間TK1を予測すればよく、その手法は問わない。
【0033】
以上説明した図5のフローチャートの処理は、例えば、図3のフローチャートにおいて、計測時間記憶部42により、計測した待機時間TKが、待機時間履歴データ50として記憶部35に記憶されたタイミング(ステップSA6、ステップSA13、及び、ステップSA16)で実行される。これにより、新たな待機時間TKが計測されたことをトリガーとして、速やかに、当該新たな待機時間TKを反映した休止動作移行時間KDが設定されることとなる。このほか、定期的に、又は、ユーザーの明示の指示により、実行するようにしてもよい。
【0034】
以上説明したように、本実施形態に係る休止動作移行時間設定部43は、計測時間記憶部42により記憶された待機時間履歴データ50(待機時間TKを示す情報の履歴)に基づいて、休止動作移行時間KDを設定する。
これによれば、プリンター12における過去の待機時間TKを反映して、休止動作移行時間KDが設定されることとなるため、プリンター12における待機時間TKの実態に即して、休止動作移行時間KDを設定することが可能となる。
ここで、休止動作へ移行中は、記録を行うための準備に係る動作を含む所定の動作が実行される。そして、所定の動作には、上述したように、インクジェットヘッド11を記録可能とするためのメンテナンス等の動作や、記録媒体に適切に記録できる状態にするための動作、インクジェットヘッド11や記録媒体、記録媒体の搬送手段などの状態の検査等が含まれている。これら動作の実行中は、並行して記録媒体への記録を行うことができず、また、これら動作の中には、一旦開始すると、停止するまでに相当の時間を要するものがある。従って、休止動作移行時間が実態と乖離して極端に短い場合、休止動作へ頻繁に移行してしまい、連続して記録を行うことができなくなり、スループットの著しい低下を招く可能性がある。しかしながら、本実施形態によれば、待機時間TKの実態に即して、休止動作移行時間KDが設定され、休止動作移行時間KDが実態と乖離して極端に短くなることを抑制でき、上記のようなスループットの著しい低下を効果的に抑制できる。
また、所定の動作には、上述したように、一旦動作を停止すると、再開し、元の状態へ復帰するのに時間を要する動作を停止すること、が含まれている。ここで、記録を行わない待機時間TKの間、必要がない動作を停止させることにより、動作に係る構成要素の磨耗等を避けて長寿命化を図ることや、エネルギーの消費を抑えることができる。しかし、一旦停止すると元の状態に戻すのに時間の掛かる動作については、不必要に停止してしまうとスループットの低下の要因となり得る。そこで、次の制御コマンドが来る間隔を履歴により推測し、所定時間内であれば、一旦停止するなどの休止動作をすると元の状態に戻すのに時間の掛かる動作については停止させず、一方、停止しても元の状態に戻すのに時間が掛からない動作については停止している。このようにすれば、長寿命化と省エネルギーを図る一方、スループットの向上も図ることができる。
【0035】
また、本実施形態では、休止動作では、少なくとも、フラッシング又はクリーニングという、時間の経過に伴うノズルにおけるインクの粘度の上昇を抑制する動作が実行される。そして、休止動作移行時間設定部43は、休止動作移行時間KDを、少なくとも、記録実行部40による記録処理が終了した後、ノズルにおけるインクの粘度の上昇を抑制する動作を実行しない時間として許容される許容時間KYより短い時間とする。
これによれば、休止動作移行時間KDが、少なくとも、記録が終了した後、ノズルの乾きを抑制する動作を実行しない時間として許容される時間より短い時間となるため、記録が終了した後、ノズルの乾きを抑制する動作を実行しない時間として許容される時間を超えて、休止動作が開始されない、といった事態が生じることを防止できる。
すなわち、本実施形態によれば、休止動作移行時間KDについて、ノズルが記録に支障を与えるに至ることを回避できる範囲で、できるだけ長い時間を設定することができる。ノズルにおけるインクの粘度の上昇を抑制する動作とは、例えば、上述したように、ノズルからのインクのフラッシングやノズルからのインクの吸引、ノズルへキャップを被せる動作などがある。これらの動作は、吐出したインクの処理が可能な特定の位置で実施するため、ヘッドを移動することなどが必要であり、また、ポンプなどは再起動するのに時間が掛かる。このため、頻繁に停止するとスループットが低下するが、本実施形態によれば、スループットの低下が抑制できる。
【0036】
また、本実施形態では、記録媒体を搬送する搬送経路上に、記録媒体を吸引する吸引プラテン45を備え、休止動作移行中に行われる動作には、吸引プラテンが記録媒体を吸引する動作が含まれる。
これによれば、インクジェットヘッド11と記録媒体の間の距離を一定に規定するため、搬送経路上に設けた例えば、吸引プラテン45により記録媒体を吸引し、これにより、当該距離を調整する。吸引プラテン45に負圧を与えるポンプは、駆動すると元の負圧に戻るまで時間がかかり、再度記録できる状態に戻すのに時間が掛かる。このため、頻繁に休止動作へ移行すると停止するとスループットが低下するが、上記構成によれば、スループットの低下が抑制できる。
【0037】
また、本実施形態では、休止動作移行時間設定部43は、休止動作移行時間KDの設定に際し、計測時間記憶部42により記憶された待機時間履歴データ50(待機時間TKを示す情報の履歴)に基づいて、直近の待機時間TKと、現時点で設定されている休止動作移行時間KDとを比較し、直近の待機時間TKの方が、現在設定されている休止動作移行時間KDよりも長い場合は、休止動作移行時間KDの値を、直近の待機時間TKの値に対応した値とする。
ここで、次に発生すると考えられる待機時間は、直近の待機時間とある程度一致する傾向にあると考えられる。
これを踏まえ、上記構成によれば、直近の待機時間TKが、休止動作移行時間KDよりも長い場合は、休止動作移行時間KDの値が、直近の待機時間TKの値に対応した値となるため、休止動作移行時間KDが、次に発生する待機時間よりも短くなることを効果的に抑制することが可能となり、これにより、不必要に休止動作が実行されることを防止可能となる。
【0038】
また、本実施形態では、休止動作移行時間設定部43は、休止動作移行時間KDの設定に際し、計測時間記憶部42により記憶された待機時間履歴データ50(待機時間を示す情報の履歴)に基づいて、以後の待機時間TKを予測し、予測した待機時間TKよりも、現時点で設定されている休止動作移行時間KDが十分長い場合は、予測した待機時間TKを下回らない範囲で、休止動作移行時間TDの値を短く設定する。
これによれば、予測した待機時間TKよりも、現時点で設定されている休止動作移行時間TDが十分長い場合は、予測した待機時間TKを下回らない範囲で、休止動作移行時間TDの値が短く設定されるため、休止動作移行時間TDが、今後発生する待機時間TKよりも極端に長くなるということを効果的に抑制することが可能となる。
【0039】
なお、上述した実施の形態は、あくまでも本発明の一態様を示すものであり、本発明の範囲内で任意に変形および応用が可能である。
インクジェットヘッド11と記録紙の間の距離を一定に規定するため、搬送路上に設けた吸引プラテンにより記録紙を吸引する。吸引プラテンに負圧を与えるポンプは、停止すると元の負圧に戻るまで10秒などと時間が掛かり、再度記録できる状態に戻すのに時間が掛かる。このため、頻繁に停止するとスループットが低下するが、上記のように休止動作移行時間TDを設定すれば、スループットの低下が抑制できる。
例えば、図1に示す各機能部はハードウェアとソフトウェアの協働により任意に実現可能であり、特定のハードウェア構成を示唆するものではない。
また、上記実施形態では、プリンター12自身が制御部30を備え、記録実行部40や、休止動作実行部41、計測時間記憶部42、及び、休止動作移行時間設定部43の各機能を有する構成を例に挙げて説明したが、例えば、これら機能をプリンター12に外部接続される別の装置が備えるようにしてもよい。
また、本発明を適用可能な記録装置は、コマンドに従って動作可能な記録装置であれば特に制限されず、インクジェット式プリンター、ドットインパクト式プリンター、レーザープリンター、熱昇華型プリンターのいずれであってもよく、他の方式で文字や画像を形成するプリンターであってもよいし、他の装置に組み込まれるプリンターであってもよい。また、電子媒体に記録するものでもよい。
また、図3、図5に記載のフローチャートに示す処理については、各ステップを実行するプログラムを、プリンター12の内部の記憶媒体に記憶させたもの、または、プリンター12の外部の記憶媒体に記憶させたものを読み出して、制御部30により実行させることもできる。
【符号の説明】
【0040】
10…ホストコンピューター(制御装置)、11…インクジェットヘッド(記録ヘッド)、12…プリンター(記録装置)、30…制御部、40…記録実行部、41…休止動作実行部、42…計測時間記憶部、43…休止動作移行時間設定部、45…吸引プラテン(吸引部)、50…待機時間履歴データ。
【技術分野】
【0001】
本発明は、制御装置に接続可能な記録装置、当該記録装置の制御方法、及び、当該記録装置を制御するためのプログラムに関する。
【背景技術】
【0002】
従来、記録装置(画像形成装置)において、記録に係る動作の終了後、予め設定された休止動作移行時間の間、記録に係る動作が開始されなかった場合、所定の休止動作(例えば、スリープモードへ移行する動作)を実行するものが知られている(例えば、特許文献1参照)。
また、この種の記録装置と、ホストコンピューター等の制御装置とを備え、制御装置は記録装置に制御コマンドを出力し、記録装置は入力された制御コマンドに基づいて、記録に係る動作を行うシステムがある。当該システムでは、記録装置は、記録に係る動作を終了した後、次の記録に係る動作を実行させる制御コマンドの受信が開始される前に、休止動作移行時間が経過した場合、所定の休止動作を実行する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−145884号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上述したシステムにおいて、記録に係る動作を終了した後、次の記録に係る動作を実行させる制御コマンドの受信が開始されるまでの待機時間に比して、休止動作移行時間が短い傾向にあると、頻繁に休止動作に移行してしまい、これに起因してスループットが低下する可能性があるという問題がある。この問題を解決するため、待機時間に比して、休止動作移行時間を非常に長い値に設定すると、適切に休止動作に移行しない結果を招く可能性があるという問題があった。
本発明は、上述した事情に鑑みてなされたものであり記録に係る動作を終了した後、次の記録に係る動作を実行させる制御コマンドの受信が開始されるまでの待機時間の実態に即して、休止動作移行時間を設定可能とすることを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明は、制御装置に接続可能な記録装置であって、前記制御装置から、制御コマンドを受信する受信部と、前記受信部により受信した前記制御コマンドに基づいて記録を実行する記録実行部と、前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信される前に、休止動作移行時間が経過した場合、前記記録実行部による記録を行うための準備に係る動作を含む所定の動作を実行する休止動作へ移行する休止動作実行部と、前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信されるまでの待機時間を計測して記憶する計測時間記憶部と、前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、前記休止動作移行時間を設定する休止動作移行時間設定部と、を備えることを特徴とする。
この構成によれば、記録装置における過去の待機時間(記録が終了した後、制御コマンドが受信されるまでの時間)を反映して、休止動作移行時間が設定されることとなるため、記録装置における待機時間の実態に即して、休止動作移行時間を設定することが可能となる。
記録を行うための準備に係る動作を含む所定の動作には、例えば、記録ヘッドを記録可能とするためのメンテナンス等の動作や、記録媒体に適切に記録できる状態にするための動作、記録ヘッドや記録媒体、カッター、記録媒体の搬送手段などの状態の検査等がある。これら動作の実行中は、並行して記録媒体への記録を行うことができず、また、これら動作の中には、一旦開始すると、停止するまでに相当の時間を要するものがある。従って、休止動作移行時間が実態と乖離して極端に短い場合、休止動作へ頻繁に移行してしまい、連続して記録を行うことができなくなり、スループットの著しい低下を招く可能性がある。これを踏まえ、上記構成によれば、待機時間の実態に即して、休止動作移行時間が設定され、休止動作移行時間が実態と乖離して極端に短くなることを抑制でき、上記のようなスループットの著しい低下を効果的に抑制できる。
また、所定の動作には、一旦動作を停止すると、再開し、元の状態へ復帰するのに時間を要する動作を停止すること、が含まれている。ここで、記録を行わない待機時間の間、必要がない動作を停止させることにより、動作に係る構成要素の磨耗等を避けて長寿命化を図ることや、エネルギーの消費を抑えることができる。しかし、一旦停止すると元の状態に戻すのに時間の掛かる動作については、不必要に停止してしまうとスループットの低下の要因となり得る。そこで、次の制御コマンドが来る間隔を履歴により推測し、所定時間内であれば、一旦停止するなどの休止動作をすると元の状態に戻すのに時間の掛かる動作については停止させず、一方、停止しても元の状態に戻すのに時間が掛からない動作については停止している。このようにすれば、長寿命化と省エネルギーを図る一方、スループットの向上も図ることができる。
【0006】
また、上記発明の記録装置であって、本発明は、複数のノズルが形成された記録ヘッドを備え、前記所定の動作には、時間の経過に伴う前記ノズルにおけるインクの粘度の上昇を抑制する動作が含まれ、前記休止動作移行時間設定部は、前記休止動作移行時間を、少なくとも、前記記録実行部による記録が終了した後、前記ノズルにおけるインクの粘度の上昇を抑制する動作を実行しない時間として許容される時間とほぼ同じか、短い時間とすることを特徴とする。
この構成によれば、休止動作移行時間が、少なくとも、記録が終了した後、ノズルの乾きを抑制する動作を実行しない時間として許容される時間とほぼ同じか、短い時間となるため、記録が終了した後、ノズルの乾きを抑制する動作を実行しない時間として許容される時間を超えて、休止動作が開始されない、といった事態が生じることを防止できる。
すなわち、上記構成によれば、休止動作移行時間について、ノズルが記録に支障を与えるに至ることを回避できる範囲で、できるだけ長い時間を設定することができる。ノズルにおけるインクの粘度の上昇を抑制する動作とは、例えば、ノズルからのインクのフラッシングやノズルからのインクの吸引、ノズルへキャップを被せる動作などがある。これらの動作は、吐出したインクの処理が可能な特定の位置で実施するため、ヘッドを移動することなどが必要であり、また、ポンプなどは再起動するのに時間が掛かる。このため、頻繁に停止するとスループットが低下するが、上記構成によれば、スループットの低下が抑制できる。
【0007】
また、上記発明の記録装置であって、本発明は、記録媒体を搬送する搬送経路上に、前記記録媒体を吸引する吸引部を備え、前記所定の動作には、前記吸引部が前記記録媒体を吸引する動作が含まれることを特徴とする。
上記構成によれば、記録ヘッドと記録媒体の間の距離を一定に規定するため、搬送経路上に設けた吸引部(例えば、吸引プラテン)により記録媒体を吸引し、これにより、当該距離を調整する。吸引部に負圧を与えるポンプは、駆動すると元の負圧に戻るまで時間がかかり、再度記録できる状態に戻すのに時間が掛かる。このため、頻繁に停止するとスループットが低下するが、上記構成によれば、スループットの低下が抑制できる。
【0008】
また、上記発明の記録装置であって、本発明は、前記休止動作移行時間設定部は、前記休止動作移行時間の設定に際し、前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、直近の前記待機時間と、現時点で設定されている前記休止動作移行時間とを比較し、直近の前記待機時間の方が、現在設定されている前記休止動作移行時間よりも長い場合は、前記休止動作移行時間の値を、直近の前記待機時間の値に対応した値とすることを特徴とする。
ここで、次に発生すると考えられる待機時間は、直近の待機時間とある程度一致する傾向にあると考えられる。
これを踏まえ、上記構成によれば、直近の待機時間が、休止動作移行時間よりも長い場合は、休止動作移行時間の値が、直近の待機時間の値に対応した値となるため、休止動作移行時間が、次に発生する待機時間よりも短くなることを効果的に抑制することが可能となり、これにより、不必要に休止動作が実行されることを防止可能となる。
【0009】
また、上記発明の記録装置であって、本発明は、前記休止動作移行時間設定部は、前記休止動作移行時間の設定に際し、前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、以後の前記待機時間を予測し、予測した前記待機時間よりも、現時点で設定されている前記休止動作移行時間が長い場合は、予測した前記待機時間を下回らない範囲で、前記休止動作移行時間の値を短く設定することを特徴とする。
この構成によれば、予測した待機時間よりも、現時点で設定されている休止動作移行時間が長い場合は、予測した待機時間を下回らない範囲で、休止動作移行時間の値が短く設定されるため、休止動作移行時間が、今後発生する待機時間よりも極端に長くなるということを効果的に抑制することが可能となる。
【0010】
また、上記目的を達成するために、本発明は、制御装置に接続可能な記録装置の制御方法であって、前記制御装置から制御コマンドを受信して記録を実行し、当該記録が終了した後、次の前記制御コマンドが受信されるまでの待機時間を計測し、当該記録が終了した後、次の前記制御コマンドが受信される前に、休止動作移行時間が経過した場合、記録を行うための準備に係る動作を含む所定の動作を実行する休止動作へ移行し、前記待機時間の履歴に基づいて、休止動作移行時間を設定することを特徴とする。
この制御方法によれば、記録装置における過去の待機時間(記録が終了した後、制御コマンドが受信されるまでの時間)を反映して、休止動作移行時間が設定されることとなるため、記録装置における待機時間の実態に即して、休止動作移行時間を設定することが可能となる。
【0011】
また、上記目的を達成するために、本発明は、制御装置に接続可能であり、前記制御装置から、制御コマンドを受信する受信部を備える記録装置の各部を制御する制御部により実行されるプログラムであって、前記制御部を、前記受信部により受信した前記制御コマンドに基づいて記録を実行する記録実行部と、前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信される前に、休止動作移行時間が経過した場合、前記記録実行部による記録を行うための準備に係る動作を含む所定の動作を実行する休止動作へ移行する休止動作実行部と、前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信されるまでの待機時間を計測して記憶する計測時間記憶部と、前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、前記休止動作移行時間を設定する休止動作移行時間設定部と、として機能させることを特徴とする。
このプログラムを実行すれば、記録装置における過去の待機時間(記録が終了した後、制御コマンドが受信されるまでの時間)を反映して、休止動作移行時間が設定されることとなるため、記録装置における待機時間の実態に即して、休止動作移行時間を設定することが可能となる。
【発明の効果】
【0012】
本発明によれば、記録装置における待機時間の実態に即して、休止動作移行時間を設定可能となる。
【図面の簡単な説明】
【0013】
【図1】記録システムの機能的構成を示すブロック図である。
【図2】プリンターとホストコンピューターの処理のタイミングを示す図である。
【図3】プリンターの動作を示すフローチャートである。
【図4】プリンターとホストコンピューターの処理のタイミングを示す図である。
【図5】プリンターの動作を示すフローチャートである。
【発明を実施するための形態】
【0014】
以下、図面を参照して本発明の実施形態について説明する。
図1は、本実施形態に係る記録システム1の機能的構成を示すブロック図である。
記録システム1は、ホストコンピューター10(制御装置)と、プリンター12(記録装置)とを備え、ホストコンピューター10の制御の下、プリンター12により記録媒体に記録するシステムである。
【0015】
ホストコンピューター10は、ホスト側制御部15と、ホスト側表示部16と、ホスト側入力部17と、インターフェイス部18と、ホスト側記憶部19と、を備えている。
ホスト側制御部15は、ホストコンピューター10の各部を中枢的に制御するものであり、演算実行部としてのCPUや、このCPUに実行される基本制御プログラムや、この基本制御プログラムに係るデータ等を不揮発的に記憶するROM、CPUに実行されるプログラムやこのプログラムに係るデータ等を一時的に記憶するRAM、その他の周辺回路等を備えている。
図1に示すように、ホスト側制御部15は、アプリケーション実行部20と、プリンタードライバー実行部21と、を備えているが、これらについては後述する。
【0016】
ホスト側表示部16は、液晶ディスプレーパネルや、有機ELパネル等の表示パネルを備え、ホスト側制御部15の制御の下、表示パネルに各種情報を表示する。
ホスト側入力部17は、各種入力デバイスに接続され、これら入力デバイスに対する操作を検出し、ホスト側制御部15に出力する。
インターフェイス部18(I/F)は、ホスト側制御部15の制御の下、プリンター12との間で通信規格に準拠した通信を行う。
ホスト側記憶部19は、各種データを書き換え可能に記憶する部位であり、ハードディスクや、EEPROM等の記憶装置を備えている。ホスト側記憶部19には、少なくとも、プリンター12制御用のプリンタードライバーが記憶されている。
【0017】
一方、プリンター12は、インクジェットヘッド11(記録ヘッド)を備え、ホストコンピューター10の制御の下、このインクジェットヘッド11に形成されたノズルからインクを吐出して、記録媒体にドットを形成することにより、記録媒体に画像を記録するインクジェット式プリンターであり、制御部30と、表示部31と、入力部32と、プリントエンジン33と、記憶部35と、インターフェイス部36(I/F)を備えている。
制御部30は、上述したホスト側制御部15と同様、CPUや、ROM、RAM、その他の周辺回路を備え、プリンター12の各部を中枢的に制御する。制御部30は、日時(日付、時刻)を計時可能であると共に、経過時間の計測等、各種計時動作を実行可能である。
表示部31は、プリンター12の動作状態等の各種情報を表示する液晶パネルや有機ELパネル等の表示パネルや、LED等を備え、制御部30の制御の下、当該表示パネルに各種情報を表示し、又は、LEDの点灯/消灯する。
入力部32は、プリンター12に設けられた各種操作スイッチに接続され、操作スイッチに対する操作を検出し操作信号として制御部30に出力する。
プリントエンジン33は、制御部30の制御の下、各種センサーの検出値を監視しながら、上述したインクジェットヘッド11のほか、インクジェットヘッド11を走査方向に走査するためのキャリッジを駆動するためのキャリッジ駆動モーターや、記録媒体を搬送する搬送ローラーを駆動するための搬送モーター等を駆動して、記録媒体に画像を記録する。
プリントエンジン33は、吸引プラテン45(吸引部)を備えている。吸引プラテン45は、記録媒体の搬送経路上に設けられ、インクジェットヘッド11と、記録媒体との距離を一定に規定するため、記録媒体を吸引する。吸引プラテン45は、記録媒体に負圧を与えるためのポンプに接続されており、制御部30は、適宜、ポンプを駆動して吸引プラテン45により記録媒体を吸引し、インクジェットヘッド11と、記録媒体との距離を一定に規定する。
インターフェイス部36は、制御部30の制御の下、ホストコンピューター10との間で通信規格に準拠した通信を行う。インターフェイス部36と、制御部30とが協働して、受信部として機能する。
記憶部35は、EEPROMや、ハードディスク等の不揮発性メモリーを備え、各種データを書き換え可能に不揮発的に記憶する。記憶部35には、プリンター12の動作を制御するためのファームウェアが記憶される。
【0018】
次いで、アプリケーション実行部20及びプリンタードライバー実行部21の説明を通して、記録システム1が記録媒体に記録する際の基本的な動作について説明する。
アプリケーション実行部20は、ホストコンピューター10に予めインストールされたアプリケーションを実行することにより、記録媒体に記録すべき画像に係る各種情報が含まれた記録データを生成し、プリンタードライバー実行部21に出力する。
プリンタードライバー実行部21は、ホストコンピューター10に予めインストールされたプリンタードライバーを実行することにより、アプリケーション実行部20から入力された記録データに基づいて、プリンター12のコマンド仕様に対応した制御コマンドを生成し、インターフェイス部18により、プリンター12の制御部30に出力する。
この制御コマンドは、プリンター12に記録媒体への記録に係る一連の動作を実行させるためのコマンド群であり、搬送機構に記録媒体を搬送させるコマンドや、インクジェットヘッド11を駆動させるコマンド等が含まれている。
制御コマンドが入力された制御部30の記録実行部40は、この制御コマンドを読み出して実行することにより、プリントエンジン33を制御して、記録媒体に記録する。この記録実行部40の機能は、CPUがファームウェアを読み出して実行する等、ハードウェアとソフトウェアとの協働により実現される。
【0019】
図2は、記録媒体に記録を行う際の、プリンター12と、ホストコンピューター10とが実行する各種処理のタイミングの関係を説明するための図である。
図2において、軸xは、時間の流れを示す時間軸であり、図中左から右へ向かって時間が経過していく様子を示している。
また、図2(A)は、プリンター12が実行する各処理のタイミングを示し、一方、図2(B)は、ホストコンピューター10が実行する各処理のタイミングを示している。
図2では、ホストコンピューター10が、プリンター12に連続して2つのジョブ(ジョブA、及び、ジョブB)を実行させる場合を表している。
ジョブとは、記録媒体への記録に係る一連の処理を便宜的に表現するものであり、1つのジョブは、1つの記録媒体への記録に係る一連の処理に対応している。
記録媒体への記録に係る一連の処理とは、例えば、単票紙に記録する場合は、インクジェットヘッド11によりインクの吐出や、キャリッジによるインクジェットヘッド11の走査、搬送ローラーによる単票紙の搬送等を含む、1つの単票紙に記録を行うために実行される一連の処理のことである。また例えば、ロール紙等の連続紙に記録する場合は、連続して記録されることが想定された一群の画像(分離して描画される画像であってもよい)を記録するために実行される一連の処理(搬送や、記録、また、切断を伴う場合は切断等を含む処理)のことである。
以下の説明において、ホストコンピューター10からプリンター12にジョブを送信するとは、記録に係る一連の処理を実行させる制御コマンドを送信することであり、また、プリンター12がジョブを実行するとは、入力された制御コマンドに基づいて、記録に係る一連の処理を実行することである。
【0020】
図2に示すように、ホストコンピューター10において、タイミングTM1にて、アプリケーション実行部20、及び、プリンタードライバー実行部21が協働して、ジョブAに係る制御コマンド生成処理を開始し、タイミングTM2で終了する。この制御コマンド生成処理では、アプリケーション実行部20による記録データの生成、及び、プリンタードライバー実行部21による制御コマンドの生成が行われる。
次いで、タイミングTM2にて、ホストコンピューター10は、ジョブAに係る制御コマンド送信処理を開始し、タイミングTM3で終了する。この制御コマンド送信処理では、制御コマンド生成処理により生成された制御コマンドが、順次、プリンター12へ出力される。なお、制御コマンドは、通常、生成されたものから順次送信されるため、制御コマンド生成処理と、制御コマンド送信処理とでは、オーバーラップした部分が存在するが、説明の明確化のため、本実施形態では、制御コマンド生成処理の後に、制御コマンド送信処理が実行されるものとする。
ホストコンピューター10におけるジョブAに係る制御コマンド送信処理において、順次、制御コマンドが送信されるのに応じて、プリンター12は、ジョブAに係る制御コマンド受信処理(タイミングTM2−タイミングTM3)により、ジョブAに係る制御コマンドを、順次、受信する。この制御コマンド受信処理では、少なくとも、受信した制御コマンドを、順次、受信バッファーに格納する処理が行われる。
なお、制御コマンドの伝送に要する時間分、ホストコンピューター10における制御コマンド送信処理と、プリンター12における制御コマンド受信処理との開始、終了のタイミングには、若干のタイムラグが生じるものの、説明の明確化のため、このタイムラグは生じないものとする。
制御コマンド受信処理によってジョブAに係る制御コマンドを受信した後、プリンター12の記録実行部40は、タイミングTM3にてジョブAに係る記録処理を開始し、タイミングTM4にて終了する。記録処理とは、記録実行部40による制御コマンドに基づいた記録に係る一連の処理のことである。なお、通常、記録実行部40は、受信した制御コマンドを順次実行していくため、制御コマンド受信処理と、記録処理とでは、オーバーラップした部分が存在するが、説明の明確化のため、制御コマンド受信処理により全ての制御コマンドを受信した後に、記録処理が実行されるものとする。
【0021】
一方、ホストコンピューター10では、タイミングTM3にて、ジョブAに連続するジョブBに係る制御コマンド生成処理を実行し、タイミングTM5で終了した後、タイミングTM5にて、ジョブBに係る制御コマンド送信処理を実行し、タイミングTM6で終了する。つまり、連続するジョブについては、間隔を開けることなく、ジョブに係る処理が連続して実行される。
プリンター12では、このジョブBに係る制御コマンド送信処理に対応して、ジョブBに係る制御コマンド受信処理(タイミングTM5−タイミングTM6)を実行し、さらに、タイミングTM6にて、記録実行部40による記録を開始し、タイミングTM7にて、終了する。
【0022】
記録媒体に記録を行う場合、プリンター12、及び、ホストコンピューター10は、以上のようなタイミングで処理をするが、この場合、プリンター12において、ジョブAに係る記録処理が終了するタイミングTM4と、ジョブBに係る制御コマンド受信処理が開始するタイミングTM5との間には、ジョブに係る処理が何ら実行されない待機時間TKが発生する。
そして、本実施形態に係るプリンター12では、制御部30の休止動作実行部41は、当該待機時間TKと、休止動作移行時間KD(後述)とを利用した以下の処理を実行する。
【0023】
図3は、プリンター12の動作を示すフローチャートである。
以下の説明において、休止動作実行部41、及び、計測時間記憶部42の機能は、CPUがファームウェアを読み出して実行する等、ハードウェアとソフトウェアとの協働により実現される。
図3に示すように、休止動作実行部41は、記録実行部40による記録処理が終了したか否かを監視する(ステップSA1)。
記録実行部40による記録処理が終了した場合(ステップSA1:YES)、休止動作実行部41は、待機時間TKの計測を開始する(ステップSA2)。このステップSA2では、休止動作実行部41は、待機時間TKの計測を開始した日時(日付、時刻)を併せて取得する。上述したように、待機時間TKとは、1のジョブに係る記録処理が終了してから、次のジョブに係る制御コマンド受信処理が開始されるまでの経過時間のことである。
次いで、休止動作実行部41は、計測中の待機時間TKが、後述する方法により予め設定された休止動作移行時間KDを上回ったか否か監視しつつ(ステップSA3)、ホストコンピューター10から新たな制御コマンドの受信が開始されたか否か(ステップSA4)を監視する。
待機時間TKが休止動作移行時間KDを上回ることなく、ホストコンピューター10から新たな制御コマンドの受信が開始された場合(ステップSA4:YES)、休止動作実行部41は、ステップSA2で計測を開始した待機時間TKの計測を停止する(ステップSA5)。このステップSA5では、休止動作実行部41は、待機時間TKの計測を終了した日時(日付、時刻)を合わせて取得する。次いで、制御部30の計測時間記憶部42は、計測した待機時間TKについて、当該待機時間TKの計測を開始した日時(以下、「開始日時」という)、及び、計測を終了した日時(以下、「終了日時」という)と対応づけて、待機時間履歴データ50として、記憶部35に記憶する(ステップSA6)。
待機時間履歴データ50とは、計測された待機時間TKを、当該待機時間TKの開始日時、及び、終了日時と対応づけて記憶するデータである。待機時間履歴データ50では、過去に発生した待機時間TKのそれぞれについて、各待機時間TKと、各待機時間TKの開始日時、及び、終了日時とが対応づけて記憶されている。つまり、待機時間履歴データ50は、過去に発生した待機時間TKの履歴を示すデータである。
次いで、休止動作実行部41は、制御コマンド受信処理を開始する(ステップSA7)。
つまり、1のジョブに係る記録処理を実行した後、休止動作移行時間KDが経過する前に、次のジョブに係る制御コマンドの受信が開始された場合、休止動作実行部41は、休止動作(後述)へ移行することなく、制御コマンド受信処理を開始する。
【0024】
一方、計測中の待機時間TKが、休止動作移行時間KDを上回った場合(ステップSA3:YES)、休止動作実行部41は、休止動作を開始する(ステップSA8)。つまり、休止動作実行部41は、記録実行部40による1のジョブに係る記録処理が終了した後、次のジョブに係る制御コマンドの受信が開始される前に、休止動作移行時間KDが経過した場合、休止動作へ移行する。
休止動作へ移行している間は、記録を行うための準備に係る動作を含む所定の動作が実行される。
所定の動作とは、例えば、インクジェットヘッド11のメンテナンスに係る動作や、記録媒体に適切に記録できる状態にするための動作、インクジェットヘッド11や吸引プラテン45等の、プリントエンジン33の各種機構、装置に対する検査等が含まれている。
これら動作は、記録に係る各種機構、装置を利用して行われる動作であるため、休止動作へ移行している間は、並行して記録媒体への記録を行うことがでない。また、これら動作の中には、一旦開始すると、停止するまでに相当の時間を要するものがあるため、一旦、休止動作へ移行すると、記録媒体への記録を再開するまで相当の時間を要することとなる。例えば、所定の動作に含まれる「記録媒体に適切に記録できる状態するための動作」には、吸引プラテン45を利用したインクジェットヘッド11と記録媒体との距離の規定が含まれている。そして、吸引プラテン45に負圧を与えるポンプは、一旦、駆動すると元の負圧に戻るまで相当の時間を要する。
また、所定の動作には、一旦動作を停止すると、再開し、元の状態へ復帰するのに時間を要する動作を停止すること、が含まれている。例えば、各種モーターへの通電の停止等のハードウェア的な動作の停止や、所定のソフトウェア的な処理の停止等である。ここで、待機時間TKの間、必要がない動作を停止させることにより、動作に係る構成要素の磨耗等を避けて長寿命化を図ることや、エネルギーの消費を抑えることができる。しかし、一旦停止すると元の状態に戻すのに時間の掛かる動作については、不必要に停止してしまうとスループットの低下の要因となり得る。そこで、旦動作を停止すると、再開し、元の状態へ復帰するのに時間を要する動作については、記録処理の終了後、休止動作移行時間KDが経過して初めて実行する構成となっている。
【0025】
また、この休止動作では、少なくとも、クリーニング又はフラッシング、及び、キャッピングが行われる。
クリーニングとは、インクジェットヘッド11のノズルの内部に留まっているインクについて、時間の経過と共にインクの粘度が増加し、これに起因して吐出不良が起きることを防止するために、ノズルに留まっているインクを強制的に吸引する動作である。
クリーニング時、インクジェットヘッド11は、ホームポジション等の所定の位置に移動され、上面が開口した箱状のキャップ(不図示)に収容された上で、所定の手段によりノズルが形成された面に負圧が加えられ、この負圧によってノズルに留まっているインクがノズルから強制的に吸い出される。
また、フラッシングとは、ノズルにおけるインクの増粘を抑制するために実行される動作であり、インクジェットヘッド11が、ホームポジション等の所定の位置に移動され、記録媒体に吐出されない態様で、ノズル(全てのノズルであってもよく、使用頻度の低いノズルだけであってもよい)から所定回数、所定量のインクが吐出され、ノズルに留まっているインクが新たなインクに置き換えられる。
キャッピングとは、インクジェットヘッド11を、キャップ(不図示)に収納し、これによりノズルが露出していない状態とし、ノズルに留まっているインクの乾燥、及び、乾燥に伴う増粘を抑制する処理である。
なお、上記動作のほか、ノズルチェック処理(インクジェットヘッド11に形成された各ノズルについて吐出不良の発生の有無を検出する処理)を行うようにしてもよい。
【0026】
休止動作では、上述したように、記録に係る機構(例えば、インクジェットヘッド11)を使用するため、休止動作を実行中に、同時並行的にインクジェットヘッド11から記録媒体にインクを吐出して記録を行うことは不可能である。
また、休止動作では、インクジェットヘッド11を移動する動作、インクジェットヘッド11からインクを吐出する動作、キャップを駆動してインクジェットヘッド11をキャップに収容する動作等、複数の物理的な動作が連続して実行されるため、休止動作が開始されてから、終了するまでに相当の時間を要することとなる。
また、休止動作では、時間の経過に伴うノズルにおけるインクの粘度の上昇を抑制する動作であるクリーニング、又は、フラッシングが行われるが、本実施形態では、インクの粘度の上昇を効果的に抑制するという観点から、記録処理が終了した後、休止動作を実行しない時間として許容される時間である許容時間KYが予め定められている。
また、休止動作中であっても、制御コマンド受信処理は実行可能である。すなわち、休止動作中は、制御コマンド受信処理は並行して実行できる一方、記録実行部40による記録処理を並行して実行できない。
【0027】
ステップSA8において、休止動作を開始した後、休止動作実行部41は、休止動作が終了したか否かを監視する(ステップSA9)。
休止動作が終了した場合(ステップSA9:YES)、休止動作実行部41は、ホストコンピューター10から新たな制御コマンドの受信が開始されたか否かを監視し(ステップSA10)、受信が開始された場合(ステップSA10:YES)、待機時間TKの計測を停止し(ステップSA11)、計測時間記憶部42により待機時間TKを記憶部35に記憶し(ステップSA12)、制御コマンド受信処理を開始する(ステップSA13)。
一方、休止動作が終了していない場合(ステップSA9:NO)、休止動作実行部41は、ホストコンピューター10から新たな制御コマンドの受信が開始されたか否かを監視し(ステップSA14)、制御コマンドの受信が開始されていない場合(ステップSA14:NO)、処理手順をステップSA9へ移行し、引き続き、休止動作が終了したか否かを監視する。
ステップSA14において、ホストコンピューター10から新たな制御コマンドの受信が開始された場合(ステップSA14:YES)、休止動作実行部41は、待機時間TKの計測を停止し(ステップSA15)、計測時間記憶部42により待機時間TKを記憶部35に記憶し(ステップSA16)、制御コマンド受信処理を開始する(ステップSA17)。
次いで、休止動作実行部41は、休止動作が終了したか否かを監視し(ステップSA18)、終了していない場合(ステップSA18:NO)、待機処理を実行する(ステップSA19)。この待機処理とは、1のジョブに係る制御コマンド受信処理が終了した場合であっても、当該1のジョブに係る記録処理を待機する、という処理が行われる。すなわち、本実施形態では、休止動作が終了しない限り、記録処理が開始されない。
休止動作実行部41は、休止動作が終了するまで、待機処理を継続して実行する(ステップSA18、ステップSA19)。
休止動作が終了した場合(ステップSA18:YES)、休止動作実行部41は、既に制御コマンド受信処理が終了している場合は、記録実行部40による記録処理を開始し、また、制御コマンド受信処理が終了していない場合は、制御コマンド受信処理の終了後に、記録処理を開始する(ステップSA20)。
【0028】
以上のように、休止動作実行部41は、1のジョブに係る記録処理が終了した後、次のジョブに係る制御コマンドの受信が開始される前に、休止動作移行時間KDが到来した場合、休止動作を実行するが、これにより、以下のような問題点がある。
【0029】
図4は、上述した場合におけるホストコンピューター10とプリンター12とが実行する各種処理のタイミングを示す図である。
図4に示すように、ジョブAに係る記録動作がタイミングTM4にて終了した後、ジョブBに係る制御コマンド受信処理が開始されるタイミングTM5の前に、休止動作移行時間KDがタイミングTM8で到来したとする。
この場合、休止動作実行部41は、タイミングTM8にて、休止動作の実行を開始する。上述したように、休止動作は、その開始から終了に至るまで相当の時間を要するが、図4の例では、制御コマンド受信処理が終了するタイミングTM6よりも後のタイミングTM9にて、休止動作が終了する。
上述したように、休止動作実行中は、制御コマンド受信処理は実行できるものの、記録処理は実行できないため、プリンター12は、休止動作が終了するまで、記録処理の開始を待機し、休止動作が終了するタイミングTM9にて、記録処理を開始し、タイミングTM10にて終了する。
この場合、タイミングTM6からタイミングTM9にいたる待機処理分、処理が終了するタイミングに遅延が生じる結果となる。
特に、ジョブAと、ジョブBとは、ホストコンピューター10がプリンター12に、連続して、実行させようとした処理であるが、待機時間TKよりも休止動作移行時間KDが短いことに起因して、このように連続してジョブを実行する場合、すなわち、一連のジョブの全てができるだけ早いタイミングで完了することが求められる場合に、処理が終了するタイミングに遅延が生じる結果となってしまう。
【0030】
この問題を解決するためには、休止動作移行時間KDを、できるだけ長く設定すればよい。これにより、休止動作移行時間KDが長ければ長いほど、待機時間TKよりも休止動作移行時間KDが短くなる確率を低減できるからである。
しかしながら、上述したように、休止動作は、ノズルにおけるインクの増粘を抑制する処理や、その他の検査処理、調整処理等が行われる。従って、連続してジョブを実行しない場合は、できるだけ早く、休止動作を実行したいとするニーズがある。
以上を踏まえ、本実施形態に係るプリンター12では、休止動作移行時間KDを以下の方法により動的に変更し、処理が終了するタイミングの遅延が発生することを抑制すると共に、休止動作移行時間KDが不必要に長くなることを抑制している。
【0031】
図5は、休止動作移行時間KDを設定する際の、プリンター12の動作を示すフローチャートである。
以下の説明において、休止動作移行時間設定部43の機能は、CPUがファームウェアを実行する等、ハードウェアとソフトウェアとの協働により実現される。
図5に示すように、まず、制御部30の休止動作移行時間設定部43は、記憶部35の待機時間履歴データ50を参照し、直近の待機時間TKを取得する(ステップSB1)。
そして、休止動作移行時間設定部43は、ステップSB1で取得した直近の待機時間TKの値の方が、現時点の休止動作移行時間KDの値よりも大きいか否かを判別する(ステップSB2)。
ステップSB1で取得した直近の待機時間TKの値の方が、現時点の休止動作移行時間KDの値よりも大きい場合、休止動作移行時間設定部43は、休止動作移行時間KDの値を、直近の待機時間TKの値へと変更する(ステップSB3)。なお、上述したように、記録処理が終了してから、許容時間KY内に休止動作を実行する必要があるため、休止動作移行時間設定部43は、少なくとも、休止動作移行時間KDを許容時間KYよりも短く設定する。具体的には、ステップSB1で取得した直近の待機時間TKの値の方が、現時点の休止動作移行時間KDの値よりも大きい場合であっても、待機時間TKが許容時間KYを上回っている場合は、許容時間KYを超えない範囲で予め設定された所定の上限値を、休止動作移行時間KDの値とする。
このステップSB3の処理は、以下の理由により実行される。
すなわち、直近に発生した待機時間TKと、次に発生する待機時間TKとは、ある程度一致する傾向にあると考えられる。なぜなら、待機時間TKの長さは、ホストコンピューター10における制御コマンド生成処理に要する時間の長さに応じて変化し、また、制御コマンド生成処理に要する時間の長さは、例えば、ホストコンピューター10の処理能力(CPUのパワーや、メモリーの大きさ)や、使用するアプリケーション、プリンタードライバー等によって変動する。そして、直近に待機時間TKが発生してから、次に待機時間TKが発生するまでの間に、ホストコンピューター10の処理能力や、使用するアプリケーション、プリンタードライバー等が変更されている可能性は低いと考えることができるからである。
そして、ステップSB1で取得した直近の待機時間TKの値の方が、現時点の休止動作移行時間KDの値よりも大きい場合、休止動作移行時間KDの値を、直近の待機時間TKの値へと変更することにより、休止動作移行時間KDが、次に発生すると予測される待機時間TKよりも短くなることを効果的に抑制することが可能となる。これにより、待機時間TKに比して、休止動作移行時間KDが不当に小さく、これに起因して、休止動作が頻繁に行われるといった事態が発生することを抑制できる。
さらに、ホストコンピューター10の処理能力や、使用するアプリケーション、プリンタードライバー等の変更等に起因して、以後発生する待機時間TKが長くなったとする。この場合であっても、待機時間TKの長時間化に対応して、休止動作移行時間KDの値が長くなることとなり、上述した変更後に休止動作が頻繁に行われるといった事態が発生することを抑制できる。
【0032】
続くステップSB4において、休止動作移行時間設定部43は、待機時間履歴データ50を参照して、過去の待機時間TKの履歴を取得し、直近に発生した待機時間TKから所定回数分、遡って発生した待機時間TKのそれぞれを取得し、これら待機時間TKの平均値を算出する(ステップSB4)。
例えば、休止動作移行時間設定部43は、直近に発生した待機時間TKも含め、過去の10回分の待機時間TKを取得し、これら待機時間TKの平均値を算出する。
次いで、休止動作移行時間設定部43は、ステップSB4で算出した平均値が、現時点の休止動作移行時間KDの1/2よりも小さいか否かを判別する(ステップSB5)。
ステップSB4で算出した平均値が、現時点の休止動作移行時間KDの1/2よりも小さい場合(ステップSA5:YES)、休止動作移行時間設定部43は、休止動作移行時間KDの値を、ステップSB4で算出した平均値へと変更する(ステップSB6)。
このステップSB4〜ステップSB6に至る処理は、以下のことを目的とした処理である。
すなわち、平均値は、過去に実際に発生した待機時間TKに基づいた、今後発生することが予測される待機時間TKの長さである、ということができる。
そして、平均値が、現時点の休止動作移行時間KDの1/2よりも小さい場合は、休止動作移行時間KDが、今後発生することが予測される待機時間TKの長さに比して、極端に大きい状態であると言える。
以上を踏まえ、ステップSB4〜ステップSB6では、休止動作移行時間設定部43は、現時点の休止動作移行時間KDの1/2よりも小さい場合(ステップSB5:YES)、休止動作移行時間KDが、今後発生することが予測される待機時間TKの長さに比して、極端に大きい状況であるものとして、休止動作移行時間KDと、今後発生することが予測される待機時間TKとの乖離を解消すべく、休止動作移行時間KDの値を、ステップSB4で算出した平均値へと変更する。
これにより、今後発生することが予測される待機時間TKに比して、休止動作移行時間KDが極端に長い状態が継続することが防止され、待機時間TKの実態を踏まえた上で、適切に、休止動作移行時間KDを短くすることができ、これにより、連続してジョブを実行しない場合は、できるだけ早く、休止動作を実行したいとするニーズに応えることが可能となる。
なお、ステップSB6では、休止動作移行時間KDの値を、ステップSB4で算出した平均値へと変更しているが、休止動作移行時間KDの値が、平均値よりも下回らない範囲で、休止動作移行時間KDを短くするようにすればよい。例えば、休止動作移行時間KDの値を、平均値と、現時点で設定されている休止動作移行時間KDとの中間の値と変更するようにしてもよい。なぜなら、平均値は、今後発生することが予測される待機時間TKであるが、休止動作移行時間KDを、平均値よりも低くすると、休止動作移行時間KDが予測される今後の待機時間TKよりも短くなり、不必要に休止動作が実行される結果を招くこととなるからである。不必要に休止動作が実行されるとは、例えば、1のジョブに係る記録処理が終了した後、当該1のジョブに連続する次のジョブに係る制御コマンド受信処理が開始される前に、休止動作が実行される場合のことである。
また、休止動作移行時間設定部43は、過去の待機時間TKの平均によって、今後の待機時間TKを予測していたが、他の統計学的手法を利用して待機時間TK1を予測してもよい。すなわち、待機時間履歴データ50に基づいて、待機時間TK1の履歴を反映して待機時間TK1を予測すればよく、その手法は問わない。
【0033】
以上説明した図5のフローチャートの処理は、例えば、図3のフローチャートにおいて、計測時間記憶部42により、計測した待機時間TKが、待機時間履歴データ50として記憶部35に記憶されたタイミング(ステップSA6、ステップSA13、及び、ステップSA16)で実行される。これにより、新たな待機時間TKが計測されたことをトリガーとして、速やかに、当該新たな待機時間TKを反映した休止動作移行時間KDが設定されることとなる。このほか、定期的に、又は、ユーザーの明示の指示により、実行するようにしてもよい。
【0034】
以上説明したように、本実施形態に係る休止動作移行時間設定部43は、計測時間記憶部42により記憶された待機時間履歴データ50(待機時間TKを示す情報の履歴)に基づいて、休止動作移行時間KDを設定する。
これによれば、プリンター12における過去の待機時間TKを反映して、休止動作移行時間KDが設定されることとなるため、プリンター12における待機時間TKの実態に即して、休止動作移行時間KDを設定することが可能となる。
ここで、休止動作へ移行中は、記録を行うための準備に係る動作を含む所定の動作が実行される。そして、所定の動作には、上述したように、インクジェットヘッド11を記録可能とするためのメンテナンス等の動作や、記録媒体に適切に記録できる状態にするための動作、インクジェットヘッド11や記録媒体、記録媒体の搬送手段などの状態の検査等が含まれている。これら動作の実行中は、並行して記録媒体への記録を行うことができず、また、これら動作の中には、一旦開始すると、停止するまでに相当の時間を要するものがある。従って、休止動作移行時間が実態と乖離して極端に短い場合、休止動作へ頻繁に移行してしまい、連続して記録を行うことができなくなり、スループットの著しい低下を招く可能性がある。しかしながら、本実施形態によれば、待機時間TKの実態に即して、休止動作移行時間KDが設定され、休止動作移行時間KDが実態と乖離して極端に短くなることを抑制でき、上記のようなスループットの著しい低下を効果的に抑制できる。
また、所定の動作には、上述したように、一旦動作を停止すると、再開し、元の状態へ復帰するのに時間を要する動作を停止すること、が含まれている。ここで、記録を行わない待機時間TKの間、必要がない動作を停止させることにより、動作に係る構成要素の磨耗等を避けて長寿命化を図ることや、エネルギーの消費を抑えることができる。しかし、一旦停止すると元の状態に戻すのに時間の掛かる動作については、不必要に停止してしまうとスループットの低下の要因となり得る。そこで、次の制御コマンドが来る間隔を履歴により推測し、所定時間内であれば、一旦停止するなどの休止動作をすると元の状態に戻すのに時間の掛かる動作については停止させず、一方、停止しても元の状態に戻すのに時間が掛からない動作については停止している。このようにすれば、長寿命化と省エネルギーを図る一方、スループットの向上も図ることができる。
【0035】
また、本実施形態では、休止動作では、少なくとも、フラッシング又はクリーニングという、時間の経過に伴うノズルにおけるインクの粘度の上昇を抑制する動作が実行される。そして、休止動作移行時間設定部43は、休止動作移行時間KDを、少なくとも、記録実行部40による記録処理が終了した後、ノズルにおけるインクの粘度の上昇を抑制する動作を実行しない時間として許容される許容時間KYより短い時間とする。
これによれば、休止動作移行時間KDが、少なくとも、記録が終了した後、ノズルの乾きを抑制する動作を実行しない時間として許容される時間より短い時間となるため、記録が終了した後、ノズルの乾きを抑制する動作を実行しない時間として許容される時間を超えて、休止動作が開始されない、といった事態が生じることを防止できる。
すなわち、本実施形態によれば、休止動作移行時間KDについて、ノズルが記録に支障を与えるに至ることを回避できる範囲で、できるだけ長い時間を設定することができる。ノズルにおけるインクの粘度の上昇を抑制する動作とは、例えば、上述したように、ノズルからのインクのフラッシングやノズルからのインクの吸引、ノズルへキャップを被せる動作などがある。これらの動作は、吐出したインクの処理が可能な特定の位置で実施するため、ヘッドを移動することなどが必要であり、また、ポンプなどは再起動するのに時間が掛かる。このため、頻繁に停止するとスループットが低下するが、本実施形態によれば、スループットの低下が抑制できる。
【0036】
また、本実施形態では、記録媒体を搬送する搬送経路上に、記録媒体を吸引する吸引プラテン45を備え、休止動作移行中に行われる動作には、吸引プラテンが記録媒体を吸引する動作が含まれる。
これによれば、インクジェットヘッド11と記録媒体の間の距離を一定に規定するため、搬送経路上に設けた例えば、吸引プラテン45により記録媒体を吸引し、これにより、当該距離を調整する。吸引プラテン45に負圧を与えるポンプは、駆動すると元の負圧に戻るまで時間がかかり、再度記録できる状態に戻すのに時間が掛かる。このため、頻繁に休止動作へ移行すると停止するとスループットが低下するが、上記構成によれば、スループットの低下が抑制できる。
【0037】
また、本実施形態では、休止動作移行時間設定部43は、休止動作移行時間KDの設定に際し、計測時間記憶部42により記憶された待機時間履歴データ50(待機時間TKを示す情報の履歴)に基づいて、直近の待機時間TKと、現時点で設定されている休止動作移行時間KDとを比較し、直近の待機時間TKの方が、現在設定されている休止動作移行時間KDよりも長い場合は、休止動作移行時間KDの値を、直近の待機時間TKの値に対応した値とする。
ここで、次に発生すると考えられる待機時間は、直近の待機時間とある程度一致する傾向にあると考えられる。
これを踏まえ、上記構成によれば、直近の待機時間TKが、休止動作移行時間KDよりも長い場合は、休止動作移行時間KDの値が、直近の待機時間TKの値に対応した値となるため、休止動作移行時間KDが、次に発生する待機時間よりも短くなることを効果的に抑制することが可能となり、これにより、不必要に休止動作が実行されることを防止可能となる。
【0038】
また、本実施形態では、休止動作移行時間設定部43は、休止動作移行時間KDの設定に際し、計測時間記憶部42により記憶された待機時間履歴データ50(待機時間を示す情報の履歴)に基づいて、以後の待機時間TKを予測し、予測した待機時間TKよりも、現時点で設定されている休止動作移行時間KDが十分長い場合は、予測した待機時間TKを下回らない範囲で、休止動作移行時間TDの値を短く設定する。
これによれば、予測した待機時間TKよりも、現時点で設定されている休止動作移行時間TDが十分長い場合は、予測した待機時間TKを下回らない範囲で、休止動作移行時間TDの値が短く設定されるため、休止動作移行時間TDが、今後発生する待機時間TKよりも極端に長くなるということを効果的に抑制することが可能となる。
【0039】
なお、上述した実施の形態は、あくまでも本発明の一態様を示すものであり、本発明の範囲内で任意に変形および応用が可能である。
インクジェットヘッド11と記録紙の間の距離を一定に規定するため、搬送路上に設けた吸引プラテンにより記録紙を吸引する。吸引プラテンに負圧を与えるポンプは、停止すると元の負圧に戻るまで10秒などと時間が掛かり、再度記録できる状態に戻すのに時間が掛かる。このため、頻繁に停止するとスループットが低下するが、上記のように休止動作移行時間TDを設定すれば、スループットの低下が抑制できる。
例えば、図1に示す各機能部はハードウェアとソフトウェアの協働により任意に実現可能であり、特定のハードウェア構成を示唆するものではない。
また、上記実施形態では、プリンター12自身が制御部30を備え、記録実行部40や、休止動作実行部41、計測時間記憶部42、及び、休止動作移行時間設定部43の各機能を有する構成を例に挙げて説明したが、例えば、これら機能をプリンター12に外部接続される別の装置が備えるようにしてもよい。
また、本発明を適用可能な記録装置は、コマンドに従って動作可能な記録装置であれば特に制限されず、インクジェット式プリンター、ドットインパクト式プリンター、レーザープリンター、熱昇華型プリンターのいずれであってもよく、他の方式で文字や画像を形成するプリンターであってもよいし、他の装置に組み込まれるプリンターであってもよい。また、電子媒体に記録するものでもよい。
また、図3、図5に記載のフローチャートに示す処理については、各ステップを実行するプログラムを、プリンター12の内部の記憶媒体に記憶させたもの、または、プリンター12の外部の記憶媒体に記憶させたものを読み出して、制御部30により実行させることもできる。
【符号の説明】
【0040】
10…ホストコンピューター(制御装置)、11…インクジェットヘッド(記録ヘッド)、12…プリンター(記録装置)、30…制御部、40…記録実行部、41…休止動作実行部、42…計測時間記憶部、43…休止動作移行時間設定部、45…吸引プラテン(吸引部)、50…待機時間履歴データ。
【特許請求の範囲】
【請求項1】
制御装置に接続可能な記録装置であって、
前記制御装置から、制御コマンドを受信する受信部と、
前記受信部により受信した前記制御コマンドに基づいて記録を実行する記録実行部と、
前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信される前に、休止動作移行時間が経過した場合、前記記録実行部による記録を行うための準備に係る動作を含む所定の動作を実行する休止動作へ移行する休止動作実行部と、
前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信されるまでの待機時間を計測して記憶する計測時間記憶部と、
前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、前記休止動作移行時間を設定する休止動作移行時間設定部と、を備えることを特徴とする記録装置。
【請求項2】
複数のノズルが形成された記録ヘッドを備え、
前記所定の動作には、時間の経過に伴う前記ノズルにおけるインクの粘度の上昇を抑制する動作が含まれ、
前記休止動作移行時間設定部は、
前記休止動作移行時間を、少なくとも、前記記録実行部による記録が終了した後、前記ノズルにおけるインクの粘度の上昇を抑制する動作を実行しない時間として許容される時間とほぼ同じか、短い時間とすることを特徴とする請求項1に記載の記録装置。
【請求項3】
記録媒体を搬送する搬送経路上に、前記記録媒体を吸引する吸引部を備え、
前記所定の動作には、前記吸引部が前記記録媒体を吸引する動作が含まれることを特徴とする請求項1又は2に記載の記録装置。
【請求項4】
前記休止動作移行時間設定部は、
前記休止動作移行時間の設定に際し、前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、直近の前記待機時間と、現時点で設定されている前記休止動作移行時間とを比較し、直近の前記待機時間の方が、現在設定されている前記休止動作移行時間よりも長い場合は、前記休止動作移行時間の値を、直近の前記待機時間の値に対応した値とすることを特徴とする請求項1ないし3のいずれかに記載の記録装置。
【請求項5】
前記休止動作移行時間設定部は、
前記休止動作移行時間の設定に際し、前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、以後の前記待機時間を予測し、予測した前記待機時間よりも、現時点で設定されている前記休止動作移行時間が長い場合は、予測した前記待機時間を下回らない範囲で、前記休止動作移行時間の値を短く設定することを特徴とする請求項1ないし4のいずれかに記載の記録装置。
【請求項6】
制御装置に接続可能な記録装置の制御方法であって、
前記制御装置から制御コマンドを受信して記録を実行し、
当該記録が終了した後、次の前記制御コマンドが受信されるまでの待機時間を計測し、
当該記録が終了した後、次の前記制御コマンドが受信される前に、休止動作移行時間が経過した場合、記録を行うための準備に係る動作を含む所定の動作を実行する休止動作へ移行し、
前記待機時間の履歴に基づいて、休止動作移行時間を設定することを特徴とする記録装置の制御方法。
【請求項7】
制御装置に接続可能であり、前記制御装置から、制御コマンドを受信する受信部を備える記録装置の各部を制御する制御部により実行されるプログラムであって、
前記制御部を、
前記受信部により受信した前記制御コマンドに基づいて記録を実行する記録実行部と、
前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信される前に、休止動作移行時間が経過した場合、前記記録実行部による記録を行うための準備に係る動作を含む所定の動作を実行する休止動作へ移行する休止動作実行部と、
前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信されるまでの待機時間を計測して記憶する計測時間記憶部と、
前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、前記休止動作移行時間を設定する休止動作移行時間設定部と、として機能させることを特徴とするプログラム。
【請求項1】
制御装置に接続可能な記録装置であって、
前記制御装置から、制御コマンドを受信する受信部と、
前記受信部により受信した前記制御コマンドに基づいて記録を実行する記録実行部と、
前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信される前に、休止動作移行時間が経過した場合、前記記録実行部による記録を行うための準備に係る動作を含む所定の動作を実行する休止動作へ移行する休止動作実行部と、
前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信されるまでの待機時間を計測して記憶する計測時間記憶部と、
前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、前記休止動作移行時間を設定する休止動作移行時間設定部と、を備えることを特徴とする記録装置。
【請求項2】
複数のノズルが形成された記録ヘッドを備え、
前記所定の動作には、時間の経過に伴う前記ノズルにおけるインクの粘度の上昇を抑制する動作が含まれ、
前記休止動作移行時間設定部は、
前記休止動作移行時間を、少なくとも、前記記録実行部による記録が終了した後、前記ノズルにおけるインクの粘度の上昇を抑制する動作を実行しない時間として許容される時間とほぼ同じか、短い時間とすることを特徴とする請求項1に記載の記録装置。
【請求項3】
記録媒体を搬送する搬送経路上に、前記記録媒体を吸引する吸引部を備え、
前記所定の動作には、前記吸引部が前記記録媒体を吸引する動作が含まれることを特徴とする請求項1又は2に記載の記録装置。
【請求項4】
前記休止動作移行時間設定部は、
前記休止動作移行時間の設定に際し、前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、直近の前記待機時間と、現時点で設定されている前記休止動作移行時間とを比較し、直近の前記待機時間の方が、現在設定されている前記休止動作移行時間よりも長い場合は、前記休止動作移行時間の値を、直近の前記待機時間の値に対応した値とすることを特徴とする請求項1ないし3のいずれかに記載の記録装置。
【請求項5】
前記休止動作移行時間設定部は、
前記休止動作移行時間の設定に際し、前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、以後の前記待機時間を予測し、予測した前記待機時間よりも、現時点で設定されている前記休止動作移行時間が長い場合は、予測した前記待機時間を下回らない範囲で、前記休止動作移行時間の値を短く設定することを特徴とする請求項1ないし4のいずれかに記載の記録装置。
【請求項6】
制御装置に接続可能な記録装置の制御方法であって、
前記制御装置から制御コマンドを受信して記録を実行し、
当該記録が終了した後、次の前記制御コマンドが受信されるまでの待機時間を計測し、
当該記録が終了した後、次の前記制御コマンドが受信される前に、休止動作移行時間が経過した場合、記録を行うための準備に係る動作を含む所定の動作を実行する休止動作へ移行し、
前記待機時間の履歴に基づいて、休止動作移行時間を設定することを特徴とする記録装置の制御方法。
【請求項7】
制御装置に接続可能であり、前記制御装置から、制御コマンドを受信する受信部を備える記録装置の各部を制御する制御部により実行されるプログラムであって、
前記制御部を、
前記受信部により受信した前記制御コマンドに基づいて記録を実行する記録実行部と、
前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信される前に、休止動作移行時間が経過した場合、前記記録実行部による記録を行うための準備に係る動作を含む所定の動作を実行する休止動作へ移行する休止動作実行部と、
前記記録実行部による記録が終了した後、前記受信部により次の前記制御コマンドが受信されるまでの待機時間を計測して記憶する計測時間記憶部と、
前記計測時間記憶部により記憶された前記待機時間を示す情報の履歴に基づいて、前記休止動作移行時間を設定する休止動作移行時間設定部と、として機能させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−224002(P2012−224002A)
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2011−94453(P2011−94453)
【出願日】平成23年4月20日(2011.4.20)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成23年4月20日(2011.4.20)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]