
評価値算出装置及び評価値算出方法
【課題】移動方向が互いにことなる複数の移動体をセンシング対象とする場合でも、センサ設置位置を精度良く評価できる評価値算出装置及び評価値算出方法を提供すること。
【解決手段】評価値算出装置100において、評価値算出部104は、設置位置候補と、センサの、センシング対象(ここでは、移動体)の移動パラメータに対する精度特性と、センサのセンシング対象領域(ここでは、監視対象領域)における交通事象パターンとに基づいて、センシング対象領域を構成する複数の領域要素にそれぞれ対応する複数の要素単位精度劣化値を算出する。そして、交通事象パターンは、複数の領域要素と各領域要素を起点とする交通事象ベクトルとから構成される。
【解決手段】評価値算出装置100において、評価値算出部104は、設置位置候補と、センサの、センシング対象(ここでは、移動体)の移動パラメータに対する精度特性と、センサのセンシング対象領域(ここでは、監視対象領域)における交通事象パターンとに基づいて、センシング対象領域を構成する複数の領域要素にそれぞれ対応する複数の要素単位精度劣化値を算出する。そして、交通事象パターンは、複数の領域要素と各領域要素を起点とする交通事象ベクトルとから構成される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、センサ設置位置を評価するための評価値を算出する評価値算出装置及び評価値算出方法に関する。
【背景技術】
【0002】
近年、交通環境における移動体同士の衝突を予測し、衝突が生じる前に警告を行う事故防止システムの開発が目覚しい。このような事故防止システム等を含む監視システムにおいては、路側に設置された複数のセンサを用いて、センシング対象である複数の移動体の位置及び速度が導出される。そして、導出された各移動体の位置及び速度に基づいて、衝突の予測が行われる。監視システムにおける、移動体の位置及び速度の特定処理並びに衝突の予測処理をより高精度に行うために、センサの設置位置が適切か否かを評価する方法が必要となっている。
【0003】
従来のセンサ設置位置に関する評価値算出方法としては、例えば、特許文献1が評価値算出方法(以下、従来技術1)を開示する。従来技術1は、センサとしてカメラを使用し、センシング対象である1つの移動体の移動方向ベクトルと直交する平面と、カメラの光軸との為す角度を、カメラの設置位置の評価基準として用いる。そして、当該平面と、カメラの光軸との為す角度が最も大きくなる位置が、カメラの推奨設置位置とされる。
【0004】
また、従来のセンサ設置位置に関する評価値算出方法としては、例えば、特許文献2が評価値算出方法(以下、従来技術2)を開示する。従来技術2は、複数のセンサのセンシング領域間の重複量を、センサ設置位置の評価基準として用いる。そして、当該重複量によって定義される評価関数が極小になるセンサの設置位置が、推奨設置位置とされる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−14466号公報
【特許文献2】特開2007−208387号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来技術1は、複数の移動体をセンシング対象とする場合には、カメラの設置位置が適切か否かの判断に用いられる評価値が適切ではなく、当該判断を誤る可能性があった。なぜならば、移動体が複数存在する場合、ある一体の移動体を高精度に検出できる位置にカメラを設置したとしても、そのカメラの設置位置では残りの移動体を高精度に検出できない可能性があるからである。
【0007】
また、従来技術2は、センサの感度は、センシング対象の移動方向に応じて異なる場合がある。例えばカメラセンサの場合には、センシング対象がカメラ光軸に垂直に移動する場合に、そうでない場合よりもカメラに撮像される位置の変化が大きくなるため、センサの感度が高くなる。したがって、複数のセンサのセンシング領域間の重複量を評価基準とする従来技術2では、センサ設置位置が適切か否かの判断に用いられる評価値が適切ではなく、当該判断を誤る可能性があった。
【0008】
本発明の目的は、移動方向が互いに異なる複数の移動体をセンシング対象とする場合でも、センサ設置位置が適切か否かをユーザが的確に評価できるセンサ設置位置の評価値を算出する評価値算出装置及び評価値算出方法を提供することである。
【課題を解決するための手段】
【0009】
本発明の一態様の評価値算出装置は、監視領域における移動体をセンシングする複数のセンサの設置位置の適否を判断するための評価値を算出する評価値算出装置であって、複数のセンサの設置位置情報を取得する設置位置情報取得部と、センサに対する移動体の移動方向及びセンサと移動体との距離情報のうち少なくとも一方に対するセンサの精度劣化特性を保持する精度劣化特性保持部と、監視領域に含まれる地点における移動体の移動方向パターンを保持する移動方向パターン保持部と、複数のセンサの設置位置情報と移動方向パターンとに基づいて、移動体の複数のセンサに対する移動方向及び移動体と複数のセンサのそれぞれとの距離情報のうち少なくとも一方を算出し、算出された移動方向及び距離情報のうち少なくとも一方と精度劣化特性とに基づいて、監視領域に含まれる地点に対する複数のセンサの精度劣化値を評価値として算出する評価値算出部と、を備える。
【0010】
本発明の一態様の評価値算出方法は、監視領域における移動体をセンシングする複数のセンサの設置位置の適否を判断するための評価値を算出する評価値算出方法であって、設置位置情報取得部は、複数のセンサの設置位置情報を取得し、評価値算出部は、設置位置情報取得部から複数のセンサの設置位置情報を取得し、設置位置情報と、監視領域に含まれる地点における移動体の移動方向パターンとに基づいて、移動体の複数のセンサに対する移動方向及び移動体と複数のセンサのそれぞれとの距離情報のうち少なくとも一方を算出し、算出された移動方向及び距離情報のうち少なくとも一方と、予め算出された、センサに対する移動体の移動方向及びセンサと移動体との距離情報のうち少なくとも一方に対するセンサの精度劣化特性とに基づいて、監視領域に含まれる地点に対する複数のセンサの精度劣化値を評価値として算出する。
【発明の効果】
【0011】
本発明によれば、移動方向が互いに異なる複数の移動体をセンシング対象とする場合でも、センサ設置位置が適切か否かをユーザが的確に評価できる評価値を算出する評価値算出装置及び評価値算出方法を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態1に係る評価値算出装置の要部構成を示すブロック図
【図2】監視領域及び設置位置情報の説明に供する図
【図3】移動パラメータとして移動体の移動方向が用いられる場合の精度劣化特性を示す図
【図4】センサに対する移動方向角度の説明に供する図
【図5】移動方向パターンの説明に供する図。(A)一つの起点に一つのベクトルが対応する例、(B)一つの起点に複数のベクトルが対応する例、(C)起点の設定が等間隔では無い場合の例を示す図
【図6】移動方向パターンの生成方法の説明に供する図
【図7】本発明の実施の形態1に係るセンサ設置位置評価システムの構成を示すブロック図
【図8】評価値算出部の処理の説明に供するフロー図
【図9】評価値算出部の処理の説明に供する図。(A)センサから起点までの距離、(B)センサに対する移動方向角度、(C)精度劣化特性の例を示す図
【図10】地点精度劣化値の例を示す図
【図11】本発明の実施の形態2に係る評価値算出装置の要部構成を示すブロック図
【図12】本発明の実施の形態3に係る評価値算出装置の要部構成を示すブロック図
【図13】評価値算出装置の動作説明に供するフロー図
【図14】評価値算出装置の動作説明に供する図
【図15】地点グループ精度劣化値の利用方法の説明に供する図
【図16】地点精度劣化値、地点グループ精度劣化値、及び総合精度劣化値の表示例の説明に供する図
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態について図面を参照して詳細に説明する。なお、実施の形態において、同一の構成要素には同一の符号を付し、その同一の構成要素の説明は重複するので省略する。
【0014】
[実施の形態1]
[評価値算出装置100の要部構成]
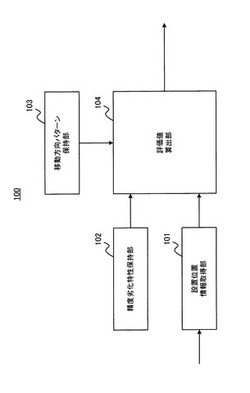
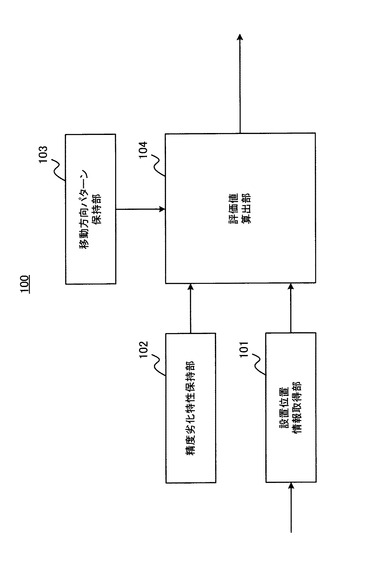
図1は、本発明の実施の形態1に係る評価値算出装置100の要部構成を示す。評価値算出装置100は、1つ又は複数のセンサを有する交通監視システムにおいて、センサの設置位置を評価するための評価値を算出する。算出された評価値に基づいて、ユーザがセンサの設置位置の適否を判断する。以下では、例として、交通監視システムが複数のセンサを有する場合について説明する。
【0015】
図1において、評価値算出装置100は、設置位置情報取得部101と、精度劣化特性保持部102と、移動方向パターン保持部103と、評価値算出部104とを有する。
【0016】
設置位置情報取得部101は、交通監視システムにおける複数のセンサの設置位置の情報(以下、「設置位置情報」と呼ぶ)を取得する。設置位置情報は、交通監視システムの監視領域(例えば、横断歩道、交差点等)における複数のセンサの位置情報を含む。複数のセンサの位置情報は、たとえば、監視領域の座標系において、座標点として表される。
【0017】
なお、入力される設置位置情報の座標系と、後述する評価値算出部104において用いられる監視領域の座標系とが一致しない場合には、設置位置情報取得部101は、入力される設置位置情報の座標系を、評価値算出部104における座標系に揃えるように動作すればよい。
【0018】
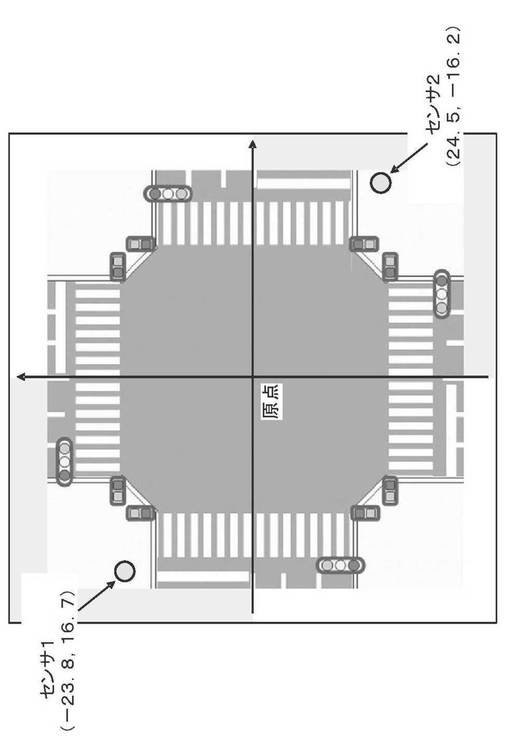
図2は、監視領域及び設置位置情報の説明に供する図であり、監視領域(例えば、交差点)の俯瞰図が示されている。図2において、交通監視システムはセンサ1とセンサ2とを有し、監視領域における座標系の原点は、監視領域の中心である。そして、設置位置情報は、センサ1の設置位置の座標(−23.8,16.7)、及び、センサ2の設置位置の座標(24.5,−16.2)を含む。
【0019】
図1に戻り、精度劣化特性保持部102は、センサに対する移動体の移動方向、及び、センサと移動体との距離情報のうち少なくとも一方に対するセンサの精度劣化特性を保持する。センサは、センシング対象である移動体の移動方向によって、センシング精度が変化する。また、センサは、移動体との距離によって、センシング精度が変化する。そのため、センシング精度が最もよい場合に対して、移動体の移動方向、及び、移動体との距離に対するセンシングの精度劣化特性が存在する。精度劣化特性保持部102は、その精度劣化特性を保持する。
【0020】
センサのセンシング精度は、移動体の移動方向が、センサの方向と垂直である場合に、最も高く、移動体の移動方向が、センサの方向に対して鋭角45度の場合に、最も低い。また、センサのセンシング精度は、移動体との距離が大きくなるほど、低下する。詳細は後述する。
【0021】
すなわち、精度劣化特性保持部102は、移動パラメータに対する精度劣化特性を保持する。「移動パラメータ」とは、センサに対するセンシング対象(たとえば、移動体)の移動方向、及び、センサと移動体との距離情報のうち少なくも一つを含むパラメータである。「精度劣化値」とは、センサを用いて移動パラメータを計測した場合の精度(たとえば、精度の劣化度合い)を示す値である。「精度劣化特性」とは、「移動パラメータ」に対する「精度劣化値」の特性である。すなわち、精度劣化特性とは、センサを用いて、移動パラメータを計測した場合の精度劣化特性である。なお、「精度劣化値」は、単位がなく、精度の劣化度合いの大小を相対的に示す。
【0022】
ここで、センサに対する移動体の移動方向、及び、センサと移動体との距離を定めるための、センサの基準点を「センサ中心」、移動体の基準点を「移動体中心」と定義する。センサは、例えばレーダ又はカメラ等である。センサがレーダである場合には、ビーム照射位置をセンサ中心とすればよく、センサがカメラである場合には、撮像素子の位置をセンサ中心とすればよい。また、「移動体中心」は、移動体を真上から見た場合の移動体の重心位置とすればよい。
【0023】
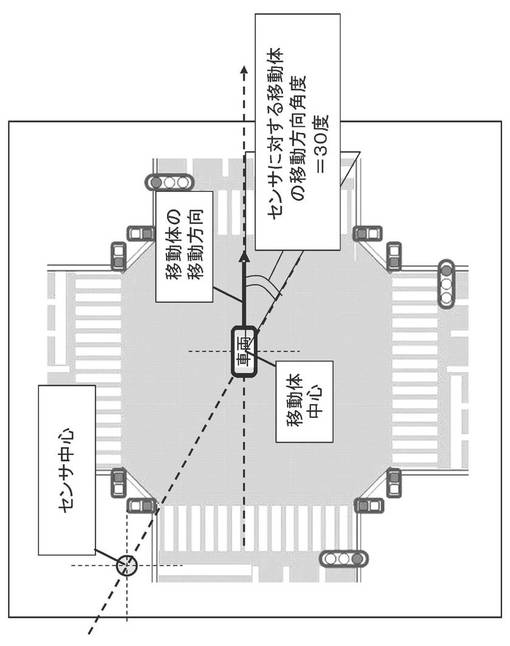
図4は、センサ中心、及び、移動体中心の例を示す。そして、センサ中心と移動体中心とを結ぶ直線と、移動体の移動方向との成す角を、センサに対する移動方向角度と呼ぶ。図4は、センサに対する移動方向角度が30度である場合の監視領域の例を示す。
【0024】
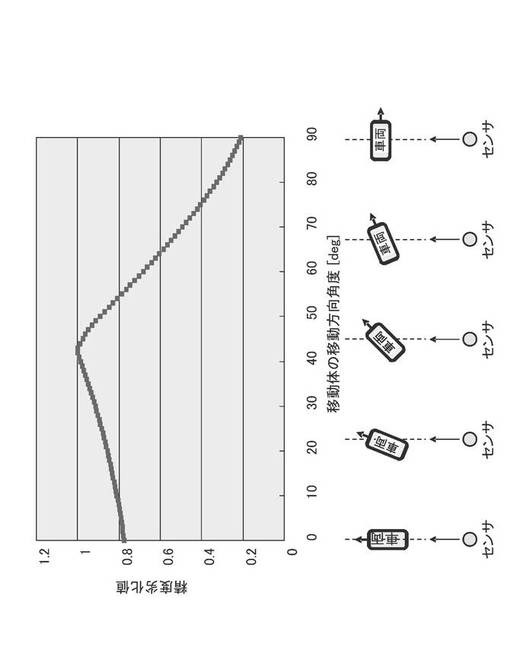
図3は、移動パラメータとして「移動体の移動方向」が用いられる場合の精度劣化特性の例を示す。図3は、センサがアクティブ型レーダセンサである場合の精度劣化特性を模式的に示し、センサに対する移動方向角度が40〜50度付近である場合に、精度劣化値が大きい。また、センサに対する移動体の移動方向角度が90度付近においては、センサに対する移動体の移動方向角度が40〜50度付近の場合と比較して、精度劣化値が2割程度に抑えられえている。
【0025】
なお、移動パラメータとして、「センサと移動体との距離」が用いられる場合、精度劣化特性保持部102は、センサと移動体との距離に対する精度劣化特性を保持する。この精度劣化特性においては、センサと移動体との距離が大きくなる程、センサ精度が劣化する。
【0026】
図1に戻り、移動方向パターン保持部103は、監視領域における移動方向パターンの情報を保持する。「移動方向パターン」とは、監視領域の各地点における車両(移動体)の走行する方向のパターンを示す情報を含む。「移動方向パターン」は、更に、車両(移動体)が走行する移動方向への車両(移動体)の交通量を含んでもよい。
【0027】
移動方向パターンは予め計測され、移動方向パターン保持部103に、監視領域に対応して保持される。交差点などの監視領域の移動方向パターンは、通常の交通環境においては、標識や信号機の指示に従うため、予め保持することができる。
【0028】
移動方向ベクトルの起点は、その移動方向ベクトルに対応する交通事象の発生位置を意味する。そして、移動方向ベクトルの長さと向きは、移動方向の進行方向と交通量に対応する。なお、以下では、移動方向パターンを構成する複数の地点の集合は、地点グループと呼ばれることがある。
【0029】
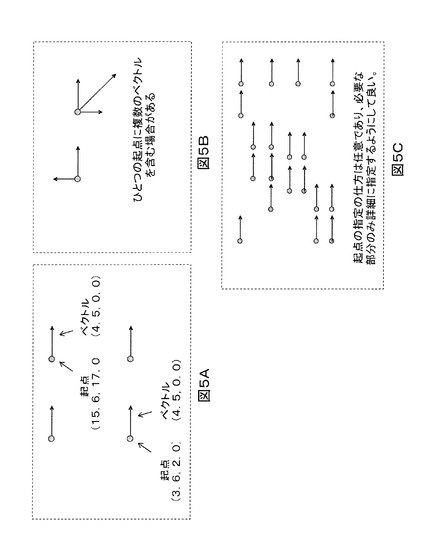
図5は、移動方向パターンの具体例を示す図であり、監視領域における移動方向ベクトルの例を示している。図5Aは、一つの起点に一つのベクトルが対応する例を示し、図5Bは、一つの起点に複数のベクトルが対応する例を示し、図5Cは、起点の設定が等間隔では無い場合の例を示す。図5Bに示すように、複数の移動方向ベクトルの起点が同一である場合がある。また、起点は、等間隔で設定される必要はなく、図5Cに示すように、必要に応じて、必要な部分に高密度で設定されてもよい。
【0030】
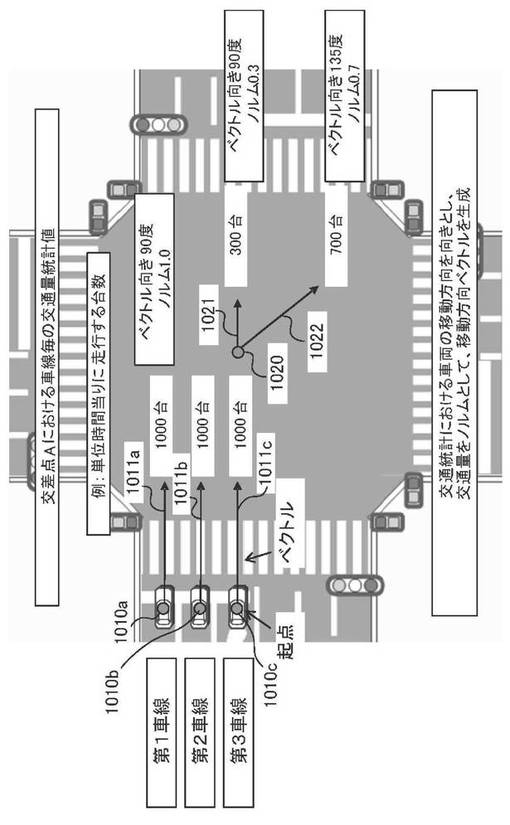
図6は、移動方向パターンの生成方法の説明に供する図である。図6に示される具体例では、移動方向ベクトルの向きは、交差点を通過する車両の方向を表し、移動方向ベクトルの大きさは、そのベクトル方向への単位時間当たりの通過量を表している。具体的には、第1車線から第3車線までの各車線において、単位時間当り1000台の車両が走行しているものとする。そして、第3車線を走行する車両は、直進する車両が300台、右折する車両が700台とする。これにより、図6の第3車線の停止線付近の地点1010a〜cにおいては、各地点を起点とし、且つ、1000台分に対応する長さを有する移動方向ベクトル1011a〜cが存在する。また、交差点の中心付近の地点1020においては、当該地点を起点とし、且つ、300台分に対応する長さを有する第1の移動方向ベクトル1021(直進に対応)と、当該地点を起点とし且つ700台分に対応する長さを有する第2の移動方向ベクトル1022(右折に対応)とが存在する。
【0031】
図1に戻り、評価値算出部104は、設置位置情報取得部101から取得される設置位置情報と、精度劣化特性保持部102から取得される精度劣化特性と、移動方向パターン保持部103から取得される移動方向パターンとに基づいて、監視領域における地点毎に、地点精度劣化値を、センサ設置位置の適否を判断するための評価値として算出する。「地点精度劣化値」(評価値)は、各地点における精度劣化値である。
【0032】
すなわち、評価値算出部104は、複数のセンサの設置位置情報と移動方向パターンとに基づいて、移動体の複数のセンサに対する移動方向、及び、移動体と複数のセンサのそれぞれとの距離情報のうち少なくとも一方を算出する。そして、評価値算出部は、算出された移動方向及び距離情報のうち少なくとも一方と精度劣化特性とに基づいて、センシング領域に含まれる地点に対する複数のセンサの精度劣化値を評価値として算出する。評価値算出部104の動作については、後述する。
【0033】
[センサ設置位置評価システム200の構成]
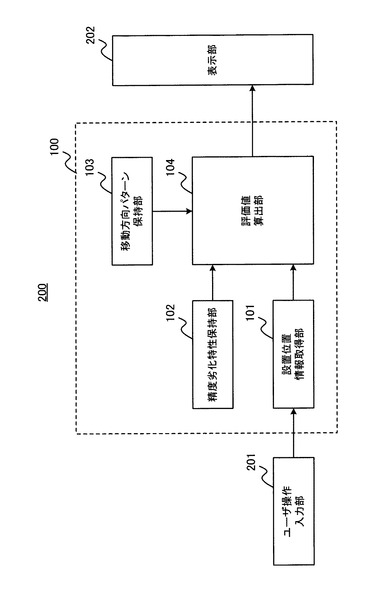
図7は、本発明の実施の形態1に係るセンサ設置位置評価システム200の構成を示す。図7において、センサ設置位置評価システム200は、評価値算出装置100と、ユーザ操作入力部201と、表示部202とを含む。
【0034】
ユーザ操作入力部201は、ユーザによるセンサの設置位置の情報を入力する。ユーザ操作入力部201は、例えば、タッチパネル又はマウス等を有する。タッチパネルを有する場合、画面に監視領域の俯瞰図が表示され、ユーザがセンサを設置したい位置に対応するタッチパネル上の位置をタッチすることにより、設置位置が指定される。ユーザによって指定された設定位置は、評価値算出装置100が備える設置位置情報取得部101へ出力される。
【0035】
表示部202は、評価値算出部104において算出された、センサ設置位置の適否を判断するための評価値である地点精度劣化値に基づいた映像を表示する。具体的な表示例については後述する。
【0036】
[評価値算出装置100の動作]
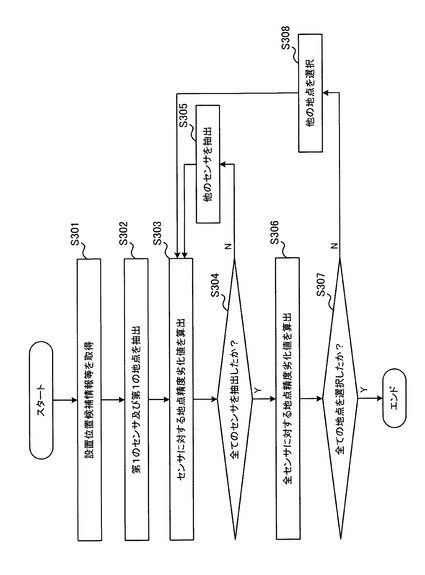
以上の構成を備える評価値算出装置100の動作について説明する。図8は、評価値算出部104の処理フローを示す。
【0037】
ステップS301において、評価値算出部104は、「設置位置情報」、「移動パラメータに対する精度劣化特性」、及び、「移動方向パターン」を取得する。
【0038】
ステップS302において、評価値算出部104は、「移動方向パターン」に含まれる複数の地点のうち第1の地点について、全センサの地点精度劣化値を算出する。具体的には、「設置位置情報」に含まれる複数のセンサに含まれる第1のセンサについて、「移動方向パターン」に含まれる複数の地点から第1の地点を抽出する。
【0039】
ステップS303において、評価値算出部104は、抽出された第1のセンサについて、第1の地点の地点精度劣化値を算出する。
【0040】
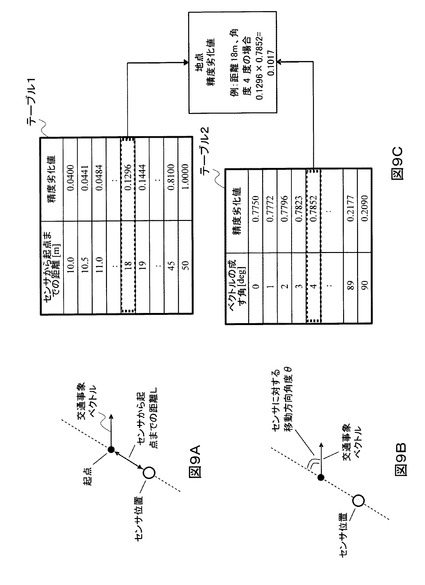
図9は、地点精度劣化値の算出処理の説明に供する図である。図9Aは、センサから起点までの距離を示し、図9Bは、センサに対する移動方向角度を示し、図9Cは、精度劣化特性の例を示す。また、図9Cのテーブル1は、移動パラメータが、「センサと移動体との距離」である場合の精度劣化特性を示す。また、図9Cのテーブル2は、移動パラメータが、「移動体の移動方向」である場合の精度劣化特性を示す。なお、ここでは精度劣化特性をテーブルとして示したが、これに限定されるものではなく、精度劣化特性は、センサと地点との距離、及び、移動ベクトルの向きをパラメータとする関数としてもよい。更に、移動ベクトルの大きさをもパラメータとする関数としてもよい。かかる場合、移動ベクトルの大きさは、各地点の地点精度劣化値を和算するときの重み付けに用いられる。
【0041】
図9A及び図9Bに示すように、抽出された第1の地点(つまり、起点)と、抽出された第1のセンサとの距離はLであり、第1のセンサに対する移動方向角度はθである。
【0042】
図9Cのテーブル1では、センサと移動体との距離Lが大きくなる程、センサ精度が劣化する特性が表れている。移動パラメータが「センサと移動体との距離」である場合の精度劣化特性のテーブルは、例えば、センサとしてステレオ構成のカメラが使用される場合には、原理上、距離の二乗に比例して精度が劣化する特性に基づいて作成されてもよい。また、移動パラメータが「センサと移動体との距離」である場合の精度劣化特性のテーブルは、距離に応じた測距精度の実験結果に基づいて作成されてもよい。
【0043】
図9Cのテーブル2では、移動方向角度が特定の角度に近い場合にセンサ精度が劣化する特性が表れている。移動パラメータが「移動体の移動方向」である場合の精度劣化特性のテーブルは、例えば、センサとしてミリ波レーダが使用される場合には、センサに対して移動体の反射面が斜め45度になる移動方向角度の場合に最も精度が劣化する特性に基づいて作成されてもよい。また、移動パラメータがセンサと移動体との移動方向角度である場合の精度劣化特性のテーブルは、距離に応じた測距精度の実験結果に基づいて作成されてもよい。
【0044】
そして、評価値算出部104は、距離Lに対応する第1の精度劣化値をテーブル1から読み取り、移動方向角度θに対応する第2の精度劣化値をテーブル2から読み取り、第1の精度劣化値と第2の精度劣化値とに基づいて、地点精度劣化値を算出する。例えば、第1の精度劣化値と、第2の精度劣化値との積算により、地点精度劣化値を算出してもよい。また、他の四則演算によって算出されてもよい。
【0045】
なお、ここでは、「センサと移動体との距離」、及び、「移動体の移動方向」の両方を用いて地点精度劣化値が算出される場合について説明したが、これに限定されるものではない。すなわち、地点精度劣化値は、「センサと移動体との距離」及び「移動体の移動方向」のうち少なくとも一方に基づいて算出される。
【0046】
例えば、「センサと移動体との距離」、又は、「移動体の移動方向」のうち一方に基づいて地点精度劣化値が算出される場合、第1の精度劣化値、又は、第2の精度劣化値が、地点精度劣化値として用いられる。具体的には、距離及び移動方向の両方に依存する精度劣化特性を持つセンサの場合には、第1の精度劣化値と第2の精度劣化値の両方を使用すれば良く、距離または移動方向の一方のみに依存するような精度劣化特性を持つセンサの場合には、第1の精度劣化値または第2の精度劣化値のみを使用すればよい。
【0047】
図8に戻り、ステップS304において、評価値算出部104は、第1の地点について、全てのセンサに対する地点精度劣化値を算出したか否かを判定する。
【0048】
第1の地点について、全てのセンサに対する地点精度劣化値を算出していない場合(ステップS304:NO)、評価値算出部104は、ステップS305において、他のセンサを抽出する。そして、フローは、ステップS303に戻る。すなわち、抽出された第1の地点について全センサの地点精度劣化値が算出される。
【0049】
第1の地点について、全てのセンサの地点精度劣化値が算出された場合(ステップS304:YES)、評価値算出部104は、ステップS306において、第1の地点についての、全てのセンサの地点精度劣化値を平均することにより、「第1の地点の地点精度劣化値」を算出する。
【0050】
ステップS307において、評価値算出部104は、全ての地点を選択したか否かを判定する。
【0051】
全ての地点を選択していない場合(ステップS307:NO)、評価値算出部104は、ステップS308において、他の地点を選択する。具体的には、第1の地点の地点精度劣化値を算出した場合、第2の地点について、全センサの地点精度劣化値を算出する。
【0052】
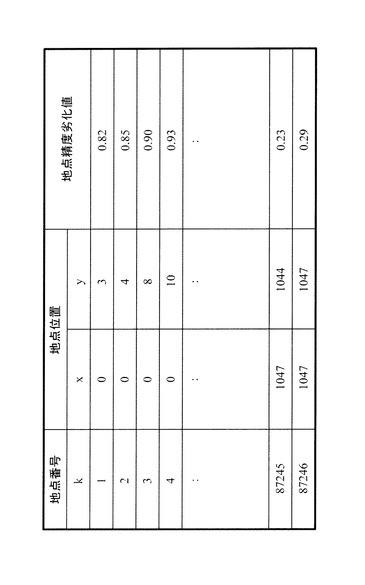
全ての地点の地点精度劣化値が算出された場合(ステップS307:YES)、フローは終了する。以上より、全ての地点の地点精度劣化値が算出される。図10は、地点精度劣化値の例を示す。
【0053】
次に、ステップS303における地点精度劣化値の算出処理、及び、ステップS306における地点精度劣化値の算出処理を、数式を用いて説明する。
【0054】
先ず、説明に用いる変数を定義する。監視領域における、任意の地点をp=(x,y)と定義する。センサaの設置位置をPa=(xa,ya)とする。移動方向パターンをcとし、地点(x,y)を起点とするベクトルの集合をcxy、その集合のi番目の要素(=ベクトル)をcxyiとする。ベクトルcxyiのX方向及びY方向の成分をそれぞれuxyi、vxyiとする。そして、起点(x,y)におけるベクトルの本数をkとする。このとき、cxy及びcxyiは、次のように定義される。
【数1】

【0055】
なお、監視領域における地点は等間隔とは限らないため、起点も等間隔では無い可能性がある。或る起点(x,y)にベクトルが存在しない場合には、各ベクトルの値は、次のように表される。
【数2】
【0056】
ステップS303における地点精度劣化値の算出は、次の式(1)によって表される。
【数3】
【0057】
すなわち、センサaを位置paに設置した場合の、地点(x,y)における地点精度劣化値は、ベクトル集合cxyとその起点pとを引数とし且つ精度劣化特性が反映された関数Rpaとして表される。
【0058】
また、ステップS306における地点精度劣化値の算出は、次の式(2)によって表される。
【数4】
【0059】
すなわち、g個のセンサを位置p1からpgに設置した場合の、地点(x,y)における地点精度劣化値は、その地点(x,y)における各センサによる地点精度劣化値を平均することにより求められる。Eは、要素の平均を表す。
【0060】
以上のように本実施の形態によれば、センサ設置位置に関する評価値算出装置100において、評価値算出部104は、設置位置と、センサのセンシング対象(ここでは、移動体)の移動パラメータに対する精度劣化特性と、センサのセンシング領域(ここでは、監視領域)における移動方向パターンとに基づいて、センシング領域における複数の地点にそれぞれ対応する地点精度劣化値を算出する。そして、移動方向パターンは、複数の地点と、各地点を起点とする移動方向ベクトルとから構成される。
【0061】
こうすることにより、複数の地点に存在するセンシング対象が異なる方向に移動することを表現可能な移動方向パターンに基づいて、各地点の地点精度劣化値を算出できる。こうして算出された各地点の地点精度劣化値を、センサ設置位置の適否を判断するための評価値として用いることにより、センサの設置位置に応じた地点精度劣化値の変化を確認することができるため、ユーザはセンサ設置位置が適切か否かを的確に評価できる。
【0062】
なお、上記の説明においては、全地点の地点精度劣化値に基づいて、ユーザがセンサ設置位置の評価を行うとして説明したが、評価値算出装置が、さらに、評価部を有し、評価部が、全地点の地点精度劣化値に基づいて、センサ設置位置の適否の評価を行ってもよい。かかる場合、装置は、「センサ位置評価装置」である。
【0063】
[実施の形態2]
本発明の実施の形態2は、実施の形態1において算出された地点精度劣化値(評価値)を用いて、「総合精度劣化値」が算出される。
【0064】
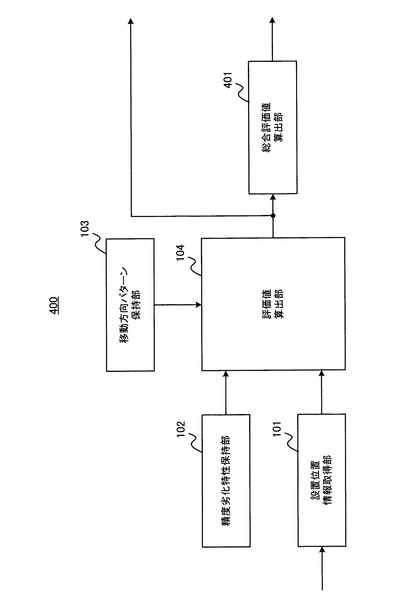
図11は、本発明の実施の形態2に係る評価値算出装置400の要部構成を示す。図11において、評価値算出装置400は、総合評価値算出部401を有する。
【0065】
総合評価値算出部401は、評価値算出部104において算出された地点精度劣化値情報に含まれる全ての地点精度劣化値を和算することにより、総合評価値としての、総合精度劣化値を算出する。総合精度劣化値Sの算出は、次の式(3)によって表される。
【数5】
【0066】
なお、総合精度劣化値は、図7の表示部202に表示されてもよい。
【0067】
[実施の形態3]
実施の形態1では、各地点における地点精度劣化値を求めた。これに対して、本発明の実施の形態3は、注目地点と当該注目地点の周囲に位置する地点群とから構成される「地点グループ」に対する地点グループ精度劣化値を算出する。
【0068】
地点グループに対する地点グループ精度劣化値を求める必要性について説明する。監視システムは、一般的に、監視領域を移動する移動体について、一定時間の経過毎に繰り返し検出処理を行う。そして検出した移動体の位置と移動方向とをもとに、前回検出した移動体と今回検出した移動体が同一移動体であるかどうかを判定する。これを追跡処理と呼ぶ。追跡処理を行うことにより、監視領域内における特定の移動体の移動軌跡を求めることができる。
【0069】
ある時間において移動体が検出できなかった場合には、移動体のこれまでの追跡処理結果に基づいて、現在移動体が存在すると想定される位置(移動体の推定位置)を推定する処理を行う。これを位置推定処理と呼ぶ。移動体が連続して検出できなかった場合には、位置推定処理を連続して行う。その後、移動体が再び検出された場合には、移動体の検出位置と推定位置とを比較することにより、同一移動体であるかどうかを判定する。
【0070】
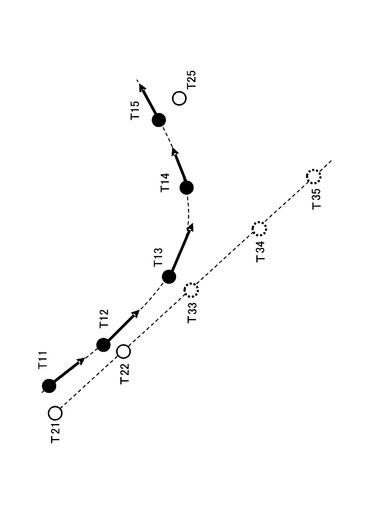
図15は、監視領域を移動する移動体の実際の位置、センサによる検出位置、及びセンサによる検出位置をもとにした移動体の推定位置を模式的に表したものである。具体的には、移動体の実際の位置をT11、T12、T13、T14、及びT15、移動体の検出位置をT21、T22、及びT25、移動体の推定位置をT33、T34、及びT35とする。移動体は、時間の経過に合わせてT11、T12、T13、T14、T15を順に移動したものとする。そして移動体の位置がT11、T12、及びT15の位置の際にはセンサによる検出が成功し、移動体の対応する検出結果はそれぞれT21、T22、及びT25であったとする。また移動体がT13及びT14の位置の際にはセンサによる検出が失敗し、移動体はT33、T34、及びT35の位置に推定されたものとする。
【0071】
図15の例は、検出位置T21及びT22に基づいて求められた移動体の推定位置T25と、移動体の実際の位置T15との差が大きくなっており、移動体の追跡処理に失敗する可能性が高くなっていることを示している。このように、移動体の検出に連続して失敗した場合、移動体の検出位置と推定位置との差が大きくなり、結果、移動体の追跡に失敗する可能性が高くなる。ある地点において地点精度劣化値が大きい場合、その地点における移動体の検出に失敗する可能性が高くなる。移動体が、地点精度劣化値の大きな地点を続けて移動した場合、移動体の検出も連続して失敗する可能性が高くなり、移動体の検出位置と推定位置との差が大きくなって、結果、移動体の追跡に失敗する可能性が高くなる。このように、移動体の追跡に失敗する可能性の大小を評価するための指標として、地点グループに対する地点精度劣化値を定めた。
【0072】
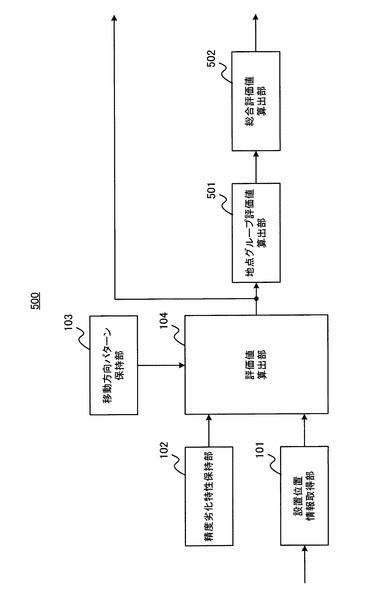
図12は、本発明の実施の形態3に係る評価値算出装置500の要部構成を示す。図12において、評価値算出装置500は、地点グループ評価値算出部501と、総合評価値算出部502とを有する。
【0073】
地点グループ評価値算出部501は、評価値算出部104において算出された地点精度劣化値と、地点グループの「移動パターン」とに基づいて、地点グループに対する地点精度劣化値を算出する。監視領域の各地点に対応して地点グループが決まる。ある地点Aに対応する地点グループAは、その地点A自身及びその地点Aの周囲に存在する地点から構成される。監視領域を格子状に分割した各領域の中心を地点とする場合、ある地点Aに対応する地点グループAは、その地点A自身及びその地点Aの周囲に存在する8つの地点から構成される。「移動パターン」は、1つの地点グループにおける、1つ又は複数の「地点サブグループ」で定義される。地点グループAにおける「地点サブグループ」は、地点グループAにおいて移動方向ベクトルの方向の差が一定値以内であるような複数の地点から構成される。
【0074】
具体的には、地点グループ評価値算出部501は、地点グループの移動パターンを表す「移動パターン行列」と、その地点グループにおける各地点の地点精度劣化値とをもとに、その地点グループにおける地点グループ精度劣化値を算出する。
【0075】
総合評価値算出部502は、地点グループ評価値算出部501において算出された地点グループ精度劣化値を全て足し合わせることにより、総合精度劣化値を算出する。
【0076】
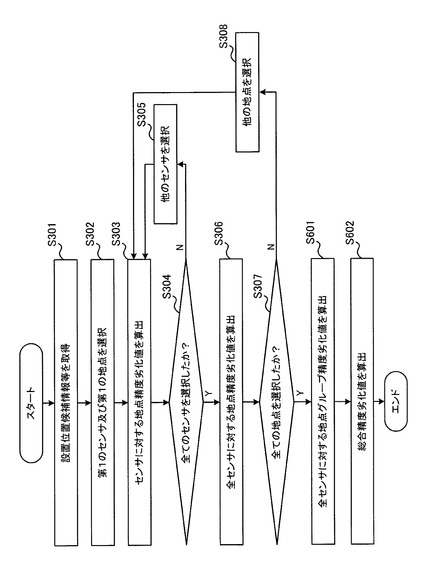
以上の構成を有する評価値算出装置500の動作について図13及び図14を参照して説明する。図13は、評価値算出装置500の動作説明に供するフロー図である。図14は、評価値算出装置500の動作説明に供する図である。
【0077】
ステップS601において、地点グループ評価値算出部501は、評価値算出部104において算出された地点精度劣化値情報と、各地点グループの移動パターンとに基づいて、地点グループ毎の地点グループ精度劣化値を算出する。
【0078】
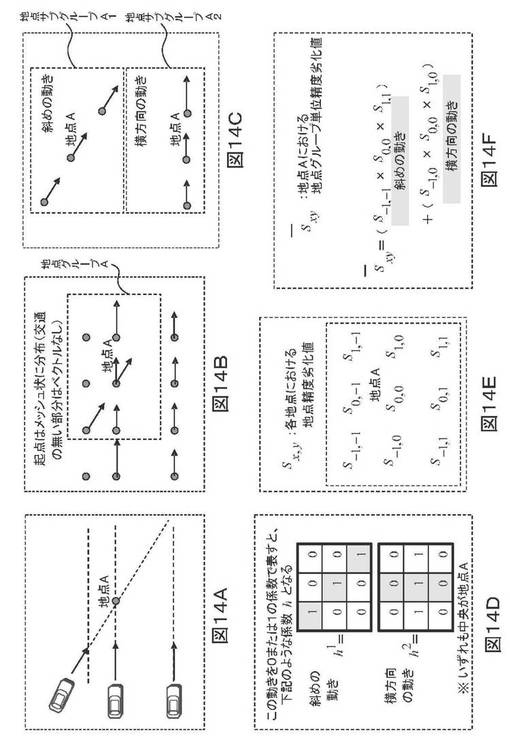
ここで、例えば、監視領域が図14Aに示すような状態である場合、移動方向パターンは、図14Bに示すような構成となる。図14Bに示す地点グループAが、地点Aに対応する地点グループとなる。図14Cに示すように、地点グループAは、地点Aを含め斜めに並ぶ3つの地点からなる地点サブグループA1と、地点Aを含め横に並ぶ3つの地点からなる第2の地点サブグループA2とから構成される。地点サブグループはそれぞれが移動パターンに対応している。これらの移動パターンを表す移動パターン行列は、図14Dに示すh1及びh2となる。h1は、地点サブグループA1に対応しており、移動体が斜め方向に移動するような移動パターンを表す。h2は地点サブグループA2対応しており、移動体が横方向の移動するような移動パターンを表す。移動パターン行列では、移動方向に対応する要素が1となり、他の要素はゼロとなる。
【0079】
そして、地点グループAに含まれる各地点の地点精度劣化値は、図14Eに示されるような形になる。そして、地点グループ評価値算出部501は、図14Fに示すように、h1における要素1に対応する地点精度劣化値をそれぞれ掛け合わせた結果と、h2における要素1に対応する地点精度劣化値を掛け合わせた結果とを加算することにより、地点グループAについての地点グループ精度劣化値を算出する。
【0080】
以上の処理を、監視領域における全ての地点に対応する地点グループで行われる。ステップS601における地点グループ精度劣化値の算出処理は、次の式(4)によって表される。
【数6】
【0081】
図13に戻り、ステップS602において、総合評価値算出部502は、地点グループ評価値算出部501において算出された地点グループ精度劣化値の全てを足し合わせることにより、総合精度劣化値を算出する。ステップS602における総合精度劣化値の算出処理は、次の式(5)によって表される。
【数7】
【0082】
以上のように本実施の形態によれば、評価値算出装置500において、地点グループ評価値算出部501は、評価値算出部104において算出された複数の地点精度劣化値と、センシング領域(ここでは、監視領域)における複数の地点グループに対応する複数の移動パターンとに基づいて、各地点グループの地点グループ精度劣化値を算出する。そして、各地点グループは、複数の地点における1つの注目地点と当該1つの注目地点の周囲に位置する地点群とから構成される。そして、各移動パターンは、対応する地点グループにおける1つ又は複数の地点サブグループから構成される。そして、各地点サブグループは、移動方向ベクトルの方向の差が一定値以内であるような複数の地点から構成される。
【0083】
こうすることにより、センシング対象の移動軌跡が考慮された評価指標である地点グループ精度劣化値を算出でき、そのような地点グループ精度劣化値をもとにした総合精度劣化値を算出することが出来る。
【0084】
[他の実施の形態]
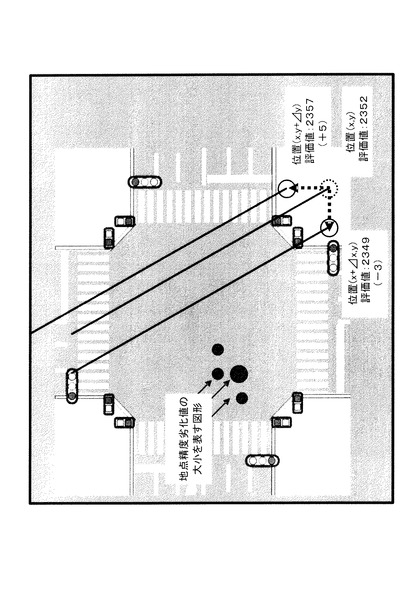
[1]図16は、地点精度劣化値、地点グループ精度劣化値、及び総合精度劣化値の表示例の説明に供する図である。総合精度劣化値は、監視領域の画像における設置位置の周辺に表示すればよい。また、地点精度劣化値又は地点グループ精度劣化値については、監視領域の画像において、所定レベルよりも精度劣化値の大きい地点を目立たせるように表示すればよい。センサ設置作業者は、表示されている各情報を参照することにより、現在の設置位置の良し悪しを判断することができる。また、センサ設置作業者は、設置位置の変更と、その変更後に表示される各情報の確認とを繰り返すことにより、センサの最適な設置位置を決定することができる。
【0085】
[2]上記各実施の形態においては、センサの設置位置を表すパラメータとして、センサの設置位置のみを使用するものとして説明した。しかしながら、これに限定されるものではなく、センサの設置位置を表すパラメータとして、センサの向きの情報を追加してもよい。この場合、センサの向きに応じて、センサの検出対象範囲を限定すればよい。具体的には、センサの検出対象範囲の端に近づくほど、精度が劣化するようにすればよい。
【0086】
[3]上記各実施の形態において、精度劣化特性保持部102に記憶されている精度劣化特性、及び、移動方向パターン保持部103に記憶されている移動方向パターンは、センサ設置支援装置の外部からの入力を行うことにより、書き換え可能にしてもよい。
【0087】
[4]上記各実施の形態においては、移動方向ベクトルの長さを交通量に比例する長さとしたが、これに限定されるものではなく、事故の発生頻度としてもよい。
【0088】
[5]実施の形態2においては、総合評価値算出部401が全ての地点精度劣化値を足し合わせることにより、総合精度劣化値を算出した。しかしながら、これに限定されるものではなく、総合評価値算出部401が全ての地点精度劣化値の平均をとることにより、総合精度劣化値を算出してもよい。また、同様に、実施の形態3における総合評価値算出部502は、全ての地点グループ精度劣化値の平均をとることにより、総合精度劣化値を算出してもよい。
【0089】
[6]上記各実施の形態では、本発明をハードウェアで構成する場合を例にとって説明したが、本発明はハードウェアとの連携においてソフトウェアでも実現することも可能である。
【0090】
また、上記各実施の形態の説明に用いた各機能ブロックは、典型的には集積回路であるLSIとして実現される。これらは個別に1チップ化されてもよいし、一部または全てを含むように1チップ化されてもよい。ここでは、LSIとしたが、集積度の違いにより、IC、システムLSI、スーパーLSI、ウルトラLSIと呼称されることもある。
【0091】
また、集積回路化の手法はLSIに限るものではなく、専用回路または汎用プロセッサで実現してもよい。LSI製造後に、プログラムすることが可能なFPGA(Field Programmable Gate Array)や、LSI内部の回路セルの接続や設定を再構成可能なリコンフィギュラブル・プロセッサーを利用してもよい。
【0092】
さらには、半導体技術の進歩または派生する別技術によりLSIに置き換わる集積回路化の技術が登場すれば、当然、その技術を用いて機能ブロックの集積化を行ってもよい。バイオ技術の適用等が可能性としてありえる。
【産業上の利用可能性】
【0093】
本発明の評価値算出装置及び評価値算出方法は、移動方向が互いに異なる複数の移動体をセンシング対象とする場合でも、センサ設置位置が適切か否かを評価できるものとして有用である。
【符号の説明】
【0094】
100,400,500 評価値算出装置
101 設置位置情報取得部
102 精度劣化特性保持部
103 移動方向パターン保持部
104 評価値算出部
200 センサ設置位置評価システム
201 ユーザ操作入力部
202 表示部
401,502 総合評価値算出部
501 地点グループ評価値算出部
【技術分野】
【0001】
本発明は、センサ設置位置を評価するための評価値を算出する評価値算出装置及び評価値算出方法に関する。
【背景技術】
【0002】
近年、交通環境における移動体同士の衝突を予測し、衝突が生じる前に警告を行う事故防止システムの開発が目覚しい。このような事故防止システム等を含む監視システムにおいては、路側に設置された複数のセンサを用いて、センシング対象である複数の移動体の位置及び速度が導出される。そして、導出された各移動体の位置及び速度に基づいて、衝突の予測が行われる。監視システムにおける、移動体の位置及び速度の特定処理並びに衝突の予測処理をより高精度に行うために、センサの設置位置が適切か否かを評価する方法が必要となっている。
【0003】
従来のセンサ設置位置に関する評価値算出方法としては、例えば、特許文献1が評価値算出方法(以下、従来技術1)を開示する。従来技術1は、センサとしてカメラを使用し、センシング対象である1つの移動体の移動方向ベクトルと直交する平面と、カメラの光軸との為す角度を、カメラの設置位置の評価基準として用いる。そして、当該平面と、カメラの光軸との為す角度が最も大きくなる位置が、カメラの推奨設置位置とされる。
【0004】
また、従来のセンサ設置位置に関する評価値算出方法としては、例えば、特許文献2が評価値算出方法(以下、従来技術2)を開示する。従来技術2は、複数のセンサのセンシング領域間の重複量を、センサ設置位置の評価基準として用いる。そして、当該重複量によって定義される評価関数が極小になるセンサの設置位置が、推奨設置位置とされる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2001−14466号公報
【特許文献2】特開2007−208387号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、従来技術1は、複数の移動体をセンシング対象とする場合には、カメラの設置位置が適切か否かの判断に用いられる評価値が適切ではなく、当該判断を誤る可能性があった。なぜならば、移動体が複数存在する場合、ある一体の移動体を高精度に検出できる位置にカメラを設置したとしても、そのカメラの設置位置では残りの移動体を高精度に検出できない可能性があるからである。
【0007】
また、従来技術2は、センサの感度は、センシング対象の移動方向に応じて異なる場合がある。例えばカメラセンサの場合には、センシング対象がカメラ光軸に垂直に移動する場合に、そうでない場合よりもカメラに撮像される位置の変化が大きくなるため、センサの感度が高くなる。したがって、複数のセンサのセンシング領域間の重複量を評価基準とする従来技術2では、センサ設置位置が適切か否かの判断に用いられる評価値が適切ではなく、当該判断を誤る可能性があった。
【0008】
本発明の目的は、移動方向が互いに異なる複数の移動体をセンシング対象とする場合でも、センサ設置位置が適切か否かをユーザが的確に評価できるセンサ設置位置の評価値を算出する評価値算出装置及び評価値算出方法を提供することである。
【課題を解決するための手段】
【0009】
本発明の一態様の評価値算出装置は、監視領域における移動体をセンシングする複数のセンサの設置位置の適否を判断するための評価値を算出する評価値算出装置であって、複数のセンサの設置位置情報を取得する設置位置情報取得部と、センサに対する移動体の移動方向及びセンサと移動体との距離情報のうち少なくとも一方に対するセンサの精度劣化特性を保持する精度劣化特性保持部と、監視領域に含まれる地点における移動体の移動方向パターンを保持する移動方向パターン保持部と、複数のセンサの設置位置情報と移動方向パターンとに基づいて、移動体の複数のセンサに対する移動方向及び移動体と複数のセンサのそれぞれとの距離情報のうち少なくとも一方を算出し、算出された移動方向及び距離情報のうち少なくとも一方と精度劣化特性とに基づいて、監視領域に含まれる地点に対する複数のセンサの精度劣化値を評価値として算出する評価値算出部と、を備える。
【0010】
本発明の一態様の評価値算出方法は、監視領域における移動体をセンシングする複数のセンサの設置位置の適否を判断するための評価値を算出する評価値算出方法であって、設置位置情報取得部は、複数のセンサの設置位置情報を取得し、評価値算出部は、設置位置情報取得部から複数のセンサの設置位置情報を取得し、設置位置情報と、監視領域に含まれる地点における移動体の移動方向パターンとに基づいて、移動体の複数のセンサに対する移動方向及び移動体と複数のセンサのそれぞれとの距離情報のうち少なくとも一方を算出し、算出された移動方向及び距離情報のうち少なくとも一方と、予め算出された、センサに対する移動体の移動方向及びセンサと移動体との距離情報のうち少なくとも一方に対するセンサの精度劣化特性とに基づいて、監視領域に含まれる地点に対する複数のセンサの精度劣化値を評価値として算出する。
【発明の効果】
【0011】
本発明によれば、移動方向が互いに異なる複数の移動体をセンシング対象とする場合でも、センサ設置位置が適切か否かをユーザが的確に評価できる評価値を算出する評価値算出装置及び評価値算出方法を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施の形態1に係る評価値算出装置の要部構成を示すブロック図
【図2】監視領域及び設置位置情報の説明に供する図
【図3】移動パラメータとして移動体の移動方向が用いられる場合の精度劣化特性を示す図
【図4】センサに対する移動方向角度の説明に供する図
【図5】移動方向パターンの説明に供する図。(A)一つの起点に一つのベクトルが対応する例、(B)一つの起点に複数のベクトルが対応する例、(C)起点の設定が等間隔では無い場合の例を示す図
【図6】移動方向パターンの生成方法の説明に供する図
【図7】本発明の実施の形態1に係るセンサ設置位置評価システムの構成を示すブロック図
【図8】評価値算出部の処理の説明に供するフロー図
【図9】評価値算出部の処理の説明に供する図。(A)センサから起点までの距離、(B)センサに対する移動方向角度、(C)精度劣化特性の例を示す図
【図10】地点精度劣化値の例を示す図
【図11】本発明の実施の形態2に係る評価値算出装置の要部構成を示すブロック図
【図12】本発明の実施の形態3に係る評価値算出装置の要部構成を示すブロック図
【図13】評価値算出装置の動作説明に供するフロー図
【図14】評価値算出装置の動作説明に供する図
【図15】地点グループ精度劣化値の利用方法の説明に供する図
【図16】地点精度劣化値、地点グループ精度劣化値、及び総合精度劣化値の表示例の説明に供する図
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態について図面を参照して詳細に説明する。なお、実施の形態において、同一の構成要素には同一の符号を付し、その同一の構成要素の説明は重複するので省略する。
【0014】
[実施の形態1]
[評価値算出装置100の要部構成]
図1は、本発明の実施の形態1に係る評価値算出装置100の要部構成を示す。評価値算出装置100は、1つ又は複数のセンサを有する交通監視システムにおいて、センサの設置位置を評価するための評価値を算出する。算出された評価値に基づいて、ユーザがセンサの設置位置の適否を判断する。以下では、例として、交通監視システムが複数のセンサを有する場合について説明する。
【0015】
図1において、評価値算出装置100は、設置位置情報取得部101と、精度劣化特性保持部102と、移動方向パターン保持部103と、評価値算出部104とを有する。
【0016】
設置位置情報取得部101は、交通監視システムにおける複数のセンサの設置位置の情報(以下、「設置位置情報」と呼ぶ)を取得する。設置位置情報は、交通監視システムの監視領域(例えば、横断歩道、交差点等)における複数のセンサの位置情報を含む。複数のセンサの位置情報は、たとえば、監視領域の座標系において、座標点として表される。
【0017】
なお、入力される設置位置情報の座標系と、後述する評価値算出部104において用いられる監視領域の座標系とが一致しない場合には、設置位置情報取得部101は、入力される設置位置情報の座標系を、評価値算出部104における座標系に揃えるように動作すればよい。
【0018】
図2は、監視領域及び設置位置情報の説明に供する図であり、監視領域(例えば、交差点)の俯瞰図が示されている。図2において、交通監視システムはセンサ1とセンサ2とを有し、監視領域における座標系の原点は、監視領域の中心である。そして、設置位置情報は、センサ1の設置位置の座標(−23.8,16.7)、及び、センサ2の設置位置の座標(24.5,−16.2)を含む。
【0019】
図1に戻り、精度劣化特性保持部102は、センサに対する移動体の移動方向、及び、センサと移動体との距離情報のうち少なくとも一方に対するセンサの精度劣化特性を保持する。センサは、センシング対象である移動体の移動方向によって、センシング精度が変化する。また、センサは、移動体との距離によって、センシング精度が変化する。そのため、センシング精度が最もよい場合に対して、移動体の移動方向、及び、移動体との距離に対するセンシングの精度劣化特性が存在する。精度劣化特性保持部102は、その精度劣化特性を保持する。
【0020】
センサのセンシング精度は、移動体の移動方向が、センサの方向と垂直である場合に、最も高く、移動体の移動方向が、センサの方向に対して鋭角45度の場合に、最も低い。また、センサのセンシング精度は、移動体との距離が大きくなるほど、低下する。詳細は後述する。
【0021】
すなわち、精度劣化特性保持部102は、移動パラメータに対する精度劣化特性を保持する。「移動パラメータ」とは、センサに対するセンシング対象(たとえば、移動体)の移動方向、及び、センサと移動体との距離情報のうち少なくも一つを含むパラメータである。「精度劣化値」とは、センサを用いて移動パラメータを計測した場合の精度(たとえば、精度の劣化度合い)を示す値である。「精度劣化特性」とは、「移動パラメータ」に対する「精度劣化値」の特性である。すなわち、精度劣化特性とは、センサを用いて、移動パラメータを計測した場合の精度劣化特性である。なお、「精度劣化値」は、単位がなく、精度の劣化度合いの大小を相対的に示す。
【0022】
ここで、センサに対する移動体の移動方向、及び、センサと移動体との距離を定めるための、センサの基準点を「センサ中心」、移動体の基準点を「移動体中心」と定義する。センサは、例えばレーダ又はカメラ等である。センサがレーダである場合には、ビーム照射位置をセンサ中心とすればよく、センサがカメラである場合には、撮像素子の位置をセンサ中心とすればよい。また、「移動体中心」は、移動体を真上から見た場合の移動体の重心位置とすればよい。
【0023】
図4は、センサ中心、及び、移動体中心の例を示す。そして、センサ中心と移動体中心とを結ぶ直線と、移動体の移動方向との成す角を、センサに対する移動方向角度と呼ぶ。図4は、センサに対する移動方向角度が30度である場合の監視領域の例を示す。
【0024】
図3は、移動パラメータとして「移動体の移動方向」が用いられる場合の精度劣化特性の例を示す。図3は、センサがアクティブ型レーダセンサである場合の精度劣化特性を模式的に示し、センサに対する移動方向角度が40〜50度付近である場合に、精度劣化値が大きい。また、センサに対する移動体の移動方向角度が90度付近においては、センサに対する移動体の移動方向角度が40〜50度付近の場合と比較して、精度劣化値が2割程度に抑えられえている。
【0025】
なお、移動パラメータとして、「センサと移動体との距離」が用いられる場合、精度劣化特性保持部102は、センサと移動体との距離に対する精度劣化特性を保持する。この精度劣化特性においては、センサと移動体との距離が大きくなる程、センサ精度が劣化する。
【0026】
図1に戻り、移動方向パターン保持部103は、監視領域における移動方向パターンの情報を保持する。「移動方向パターン」とは、監視領域の各地点における車両(移動体)の走行する方向のパターンを示す情報を含む。「移動方向パターン」は、更に、車両(移動体)が走行する移動方向への車両(移動体)の交通量を含んでもよい。
【0027】
移動方向パターンは予め計測され、移動方向パターン保持部103に、監視領域に対応して保持される。交差点などの監視領域の移動方向パターンは、通常の交通環境においては、標識や信号機の指示に従うため、予め保持することができる。
【0028】
移動方向ベクトルの起点は、その移動方向ベクトルに対応する交通事象の発生位置を意味する。そして、移動方向ベクトルの長さと向きは、移動方向の進行方向と交通量に対応する。なお、以下では、移動方向パターンを構成する複数の地点の集合は、地点グループと呼ばれることがある。
【0029】
図5は、移動方向パターンの具体例を示す図であり、監視領域における移動方向ベクトルの例を示している。図5Aは、一つの起点に一つのベクトルが対応する例を示し、図5Bは、一つの起点に複数のベクトルが対応する例を示し、図5Cは、起点の設定が等間隔では無い場合の例を示す。図5Bに示すように、複数の移動方向ベクトルの起点が同一である場合がある。また、起点は、等間隔で設定される必要はなく、図5Cに示すように、必要に応じて、必要な部分に高密度で設定されてもよい。
【0030】
図6は、移動方向パターンの生成方法の説明に供する図である。図6に示される具体例では、移動方向ベクトルの向きは、交差点を通過する車両の方向を表し、移動方向ベクトルの大きさは、そのベクトル方向への単位時間当たりの通過量を表している。具体的には、第1車線から第3車線までの各車線において、単位時間当り1000台の車両が走行しているものとする。そして、第3車線を走行する車両は、直進する車両が300台、右折する車両が700台とする。これにより、図6の第3車線の停止線付近の地点1010a〜cにおいては、各地点を起点とし、且つ、1000台分に対応する長さを有する移動方向ベクトル1011a〜cが存在する。また、交差点の中心付近の地点1020においては、当該地点を起点とし、且つ、300台分に対応する長さを有する第1の移動方向ベクトル1021(直進に対応)と、当該地点を起点とし且つ700台分に対応する長さを有する第2の移動方向ベクトル1022(右折に対応)とが存在する。
【0031】
図1に戻り、評価値算出部104は、設置位置情報取得部101から取得される設置位置情報と、精度劣化特性保持部102から取得される精度劣化特性と、移動方向パターン保持部103から取得される移動方向パターンとに基づいて、監視領域における地点毎に、地点精度劣化値を、センサ設置位置の適否を判断するための評価値として算出する。「地点精度劣化値」(評価値)は、各地点における精度劣化値である。
【0032】
すなわち、評価値算出部104は、複数のセンサの設置位置情報と移動方向パターンとに基づいて、移動体の複数のセンサに対する移動方向、及び、移動体と複数のセンサのそれぞれとの距離情報のうち少なくとも一方を算出する。そして、評価値算出部は、算出された移動方向及び距離情報のうち少なくとも一方と精度劣化特性とに基づいて、センシング領域に含まれる地点に対する複数のセンサの精度劣化値を評価値として算出する。評価値算出部104の動作については、後述する。
【0033】
[センサ設置位置評価システム200の構成]
図7は、本発明の実施の形態1に係るセンサ設置位置評価システム200の構成を示す。図7において、センサ設置位置評価システム200は、評価値算出装置100と、ユーザ操作入力部201と、表示部202とを含む。
【0034】
ユーザ操作入力部201は、ユーザによるセンサの設置位置の情報を入力する。ユーザ操作入力部201は、例えば、タッチパネル又はマウス等を有する。タッチパネルを有する場合、画面に監視領域の俯瞰図が表示され、ユーザがセンサを設置したい位置に対応するタッチパネル上の位置をタッチすることにより、設置位置が指定される。ユーザによって指定された設定位置は、評価値算出装置100が備える設置位置情報取得部101へ出力される。
【0035】
表示部202は、評価値算出部104において算出された、センサ設置位置の適否を判断するための評価値である地点精度劣化値に基づいた映像を表示する。具体的な表示例については後述する。
【0036】
[評価値算出装置100の動作]
以上の構成を備える評価値算出装置100の動作について説明する。図8は、評価値算出部104の処理フローを示す。
【0037】
ステップS301において、評価値算出部104は、「設置位置情報」、「移動パラメータに対する精度劣化特性」、及び、「移動方向パターン」を取得する。
【0038】
ステップS302において、評価値算出部104は、「移動方向パターン」に含まれる複数の地点のうち第1の地点について、全センサの地点精度劣化値を算出する。具体的には、「設置位置情報」に含まれる複数のセンサに含まれる第1のセンサについて、「移動方向パターン」に含まれる複数の地点から第1の地点を抽出する。
【0039】
ステップS303において、評価値算出部104は、抽出された第1のセンサについて、第1の地点の地点精度劣化値を算出する。
【0040】
図9は、地点精度劣化値の算出処理の説明に供する図である。図9Aは、センサから起点までの距離を示し、図9Bは、センサに対する移動方向角度を示し、図9Cは、精度劣化特性の例を示す。また、図9Cのテーブル1は、移動パラメータが、「センサと移動体との距離」である場合の精度劣化特性を示す。また、図9Cのテーブル2は、移動パラメータが、「移動体の移動方向」である場合の精度劣化特性を示す。なお、ここでは精度劣化特性をテーブルとして示したが、これに限定されるものではなく、精度劣化特性は、センサと地点との距離、及び、移動ベクトルの向きをパラメータとする関数としてもよい。更に、移動ベクトルの大きさをもパラメータとする関数としてもよい。かかる場合、移動ベクトルの大きさは、各地点の地点精度劣化値を和算するときの重み付けに用いられる。
【0041】
図9A及び図9Bに示すように、抽出された第1の地点(つまり、起点)と、抽出された第1のセンサとの距離はLであり、第1のセンサに対する移動方向角度はθである。
【0042】
図9Cのテーブル1では、センサと移動体との距離Lが大きくなる程、センサ精度が劣化する特性が表れている。移動パラメータが「センサと移動体との距離」である場合の精度劣化特性のテーブルは、例えば、センサとしてステレオ構成のカメラが使用される場合には、原理上、距離の二乗に比例して精度が劣化する特性に基づいて作成されてもよい。また、移動パラメータが「センサと移動体との距離」である場合の精度劣化特性のテーブルは、距離に応じた測距精度の実験結果に基づいて作成されてもよい。
【0043】
図9Cのテーブル2では、移動方向角度が特定の角度に近い場合にセンサ精度が劣化する特性が表れている。移動パラメータが「移動体の移動方向」である場合の精度劣化特性のテーブルは、例えば、センサとしてミリ波レーダが使用される場合には、センサに対して移動体の反射面が斜め45度になる移動方向角度の場合に最も精度が劣化する特性に基づいて作成されてもよい。また、移動パラメータがセンサと移動体との移動方向角度である場合の精度劣化特性のテーブルは、距離に応じた測距精度の実験結果に基づいて作成されてもよい。
【0044】
そして、評価値算出部104は、距離Lに対応する第1の精度劣化値をテーブル1から読み取り、移動方向角度θに対応する第2の精度劣化値をテーブル2から読み取り、第1の精度劣化値と第2の精度劣化値とに基づいて、地点精度劣化値を算出する。例えば、第1の精度劣化値と、第2の精度劣化値との積算により、地点精度劣化値を算出してもよい。また、他の四則演算によって算出されてもよい。
【0045】
なお、ここでは、「センサと移動体との距離」、及び、「移動体の移動方向」の両方を用いて地点精度劣化値が算出される場合について説明したが、これに限定されるものではない。すなわち、地点精度劣化値は、「センサと移動体との距離」及び「移動体の移動方向」のうち少なくとも一方に基づいて算出される。
【0046】
例えば、「センサと移動体との距離」、又は、「移動体の移動方向」のうち一方に基づいて地点精度劣化値が算出される場合、第1の精度劣化値、又は、第2の精度劣化値が、地点精度劣化値として用いられる。具体的には、距離及び移動方向の両方に依存する精度劣化特性を持つセンサの場合には、第1の精度劣化値と第2の精度劣化値の両方を使用すれば良く、距離または移動方向の一方のみに依存するような精度劣化特性を持つセンサの場合には、第1の精度劣化値または第2の精度劣化値のみを使用すればよい。
【0047】
図8に戻り、ステップS304において、評価値算出部104は、第1の地点について、全てのセンサに対する地点精度劣化値を算出したか否かを判定する。
【0048】
第1の地点について、全てのセンサに対する地点精度劣化値を算出していない場合(ステップS304:NO)、評価値算出部104は、ステップS305において、他のセンサを抽出する。そして、フローは、ステップS303に戻る。すなわち、抽出された第1の地点について全センサの地点精度劣化値が算出される。
【0049】
第1の地点について、全てのセンサの地点精度劣化値が算出された場合(ステップS304:YES)、評価値算出部104は、ステップS306において、第1の地点についての、全てのセンサの地点精度劣化値を平均することにより、「第1の地点の地点精度劣化値」を算出する。
【0050】
ステップS307において、評価値算出部104は、全ての地点を選択したか否かを判定する。
【0051】
全ての地点を選択していない場合(ステップS307:NO)、評価値算出部104は、ステップS308において、他の地点を選択する。具体的には、第1の地点の地点精度劣化値を算出した場合、第2の地点について、全センサの地点精度劣化値を算出する。
【0052】
全ての地点の地点精度劣化値が算出された場合(ステップS307:YES)、フローは終了する。以上より、全ての地点の地点精度劣化値が算出される。図10は、地点精度劣化値の例を示す。
【0053】
次に、ステップS303における地点精度劣化値の算出処理、及び、ステップS306における地点精度劣化値の算出処理を、数式を用いて説明する。
【0054】
先ず、説明に用いる変数を定義する。監視領域における、任意の地点をp=(x,y)と定義する。センサaの設置位置をPa=(xa,ya)とする。移動方向パターンをcとし、地点(x,y)を起点とするベクトルの集合をcxy、その集合のi番目の要素(=ベクトル)をcxyiとする。ベクトルcxyiのX方向及びY方向の成分をそれぞれuxyi、vxyiとする。そして、起点(x,y)におけるベクトルの本数をkとする。このとき、cxy及びcxyiは、次のように定義される。
【数1】
【0055】
なお、監視領域における地点は等間隔とは限らないため、起点も等間隔では無い可能性がある。或る起点(x,y)にベクトルが存在しない場合には、各ベクトルの値は、次のように表される。
【数2】
【0056】
ステップS303における地点精度劣化値の算出は、次の式(1)によって表される。
【数3】
【0057】
すなわち、センサaを位置paに設置した場合の、地点(x,y)における地点精度劣化値は、ベクトル集合cxyとその起点pとを引数とし且つ精度劣化特性が反映された関数Rpaとして表される。
【0058】
また、ステップS306における地点精度劣化値の算出は、次の式(2)によって表される。
【数4】
【0059】
すなわち、g個のセンサを位置p1からpgに設置した場合の、地点(x,y)における地点精度劣化値は、その地点(x,y)における各センサによる地点精度劣化値を平均することにより求められる。Eは、要素の平均を表す。
【0060】
以上のように本実施の形態によれば、センサ設置位置に関する評価値算出装置100において、評価値算出部104は、設置位置と、センサのセンシング対象(ここでは、移動体)の移動パラメータに対する精度劣化特性と、センサのセンシング領域(ここでは、監視領域)における移動方向パターンとに基づいて、センシング領域における複数の地点にそれぞれ対応する地点精度劣化値を算出する。そして、移動方向パターンは、複数の地点と、各地点を起点とする移動方向ベクトルとから構成される。
【0061】
こうすることにより、複数の地点に存在するセンシング対象が異なる方向に移動することを表現可能な移動方向パターンに基づいて、各地点の地点精度劣化値を算出できる。こうして算出された各地点の地点精度劣化値を、センサ設置位置の適否を判断するための評価値として用いることにより、センサの設置位置に応じた地点精度劣化値の変化を確認することができるため、ユーザはセンサ設置位置が適切か否かを的確に評価できる。
【0062】
なお、上記の説明においては、全地点の地点精度劣化値に基づいて、ユーザがセンサ設置位置の評価を行うとして説明したが、評価値算出装置が、さらに、評価部を有し、評価部が、全地点の地点精度劣化値に基づいて、センサ設置位置の適否の評価を行ってもよい。かかる場合、装置は、「センサ位置評価装置」である。
【0063】
[実施の形態2]
本発明の実施の形態2は、実施の形態1において算出された地点精度劣化値(評価値)を用いて、「総合精度劣化値」が算出される。
【0064】
図11は、本発明の実施の形態2に係る評価値算出装置400の要部構成を示す。図11において、評価値算出装置400は、総合評価値算出部401を有する。
【0065】
総合評価値算出部401は、評価値算出部104において算出された地点精度劣化値情報に含まれる全ての地点精度劣化値を和算することにより、総合評価値としての、総合精度劣化値を算出する。総合精度劣化値Sの算出は、次の式(3)によって表される。
【数5】
【0066】
なお、総合精度劣化値は、図7の表示部202に表示されてもよい。
【0067】
[実施の形態3]
実施の形態1では、各地点における地点精度劣化値を求めた。これに対して、本発明の実施の形態3は、注目地点と当該注目地点の周囲に位置する地点群とから構成される「地点グループ」に対する地点グループ精度劣化値を算出する。
【0068】
地点グループに対する地点グループ精度劣化値を求める必要性について説明する。監視システムは、一般的に、監視領域を移動する移動体について、一定時間の経過毎に繰り返し検出処理を行う。そして検出した移動体の位置と移動方向とをもとに、前回検出した移動体と今回検出した移動体が同一移動体であるかどうかを判定する。これを追跡処理と呼ぶ。追跡処理を行うことにより、監視領域内における特定の移動体の移動軌跡を求めることができる。
【0069】
ある時間において移動体が検出できなかった場合には、移動体のこれまでの追跡処理結果に基づいて、現在移動体が存在すると想定される位置(移動体の推定位置)を推定する処理を行う。これを位置推定処理と呼ぶ。移動体が連続して検出できなかった場合には、位置推定処理を連続して行う。その後、移動体が再び検出された場合には、移動体の検出位置と推定位置とを比較することにより、同一移動体であるかどうかを判定する。
【0070】
図15は、監視領域を移動する移動体の実際の位置、センサによる検出位置、及びセンサによる検出位置をもとにした移動体の推定位置を模式的に表したものである。具体的には、移動体の実際の位置をT11、T12、T13、T14、及びT15、移動体の検出位置をT21、T22、及びT25、移動体の推定位置をT33、T34、及びT35とする。移動体は、時間の経過に合わせてT11、T12、T13、T14、T15を順に移動したものとする。そして移動体の位置がT11、T12、及びT15の位置の際にはセンサによる検出が成功し、移動体の対応する検出結果はそれぞれT21、T22、及びT25であったとする。また移動体がT13及びT14の位置の際にはセンサによる検出が失敗し、移動体はT33、T34、及びT35の位置に推定されたものとする。
【0071】
図15の例は、検出位置T21及びT22に基づいて求められた移動体の推定位置T25と、移動体の実際の位置T15との差が大きくなっており、移動体の追跡処理に失敗する可能性が高くなっていることを示している。このように、移動体の検出に連続して失敗した場合、移動体の検出位置と推定位置との差が大きくなり、結果、移動体の追跡に失敗する可能性が高くなる。ある地点において地点精度劣化値が大きい場合、その地点における移動体の検出に失敗する可能性が高くなる。移動体が、地点精度劣化値の大きな地点を続けて移動した場合、移動体の検出も連続して失敗する可能性が高くなり、移動体の検出位置と推定位置との差が大きくなって、結果、移動体の追跡に失敗する可能性が高くなる。このように、移動体の追跡に失敗する可能性の大小を評価するための指標として、地点グループに対する地点精度劣化値を定めた。
【0072】
図12は、本発明の実施の形態3に係る評価値算出装置500の要部構成を示す。図12において、評価値算出装置500は、地点グループ評価値算出部501と、総合評価値算出部502とを有する。
【0073】
地点グループ評価値算出部501は、評価値算出部104において算出された地点精度劣化値と、地点グループの「移動パターン」とに基づいて、地点グループに対する地点精度劣化値を算出する。監視領域の各地点に対応して地点グループが決まる。ある地点Aに対応する地点グループAは、その地点A自身及びその地点Aの周囲に存在する地点から構成される。監視領域を格子状に分割した各領域の中心を地点とする場合、ある地点Aに対応する地点グループAは、その地点A自身及びその地点Aの周囲に存在する8つの地点から構成される。「移動パターン」は、1つの地点グループにおける、1つ又は複数の「地点サブグループ」で定義される。地点グループAにおける「地点サブグループ」は、地点グループAにおいて移動方向ベクトルの方向の差が一定値以内であるような複数の地点から構成される。
【0074】
具体的には、地点グループ評価値算出部501は、地点グループの移動パターンを表す「移動パターン行列」と、その地点グループにおける各地点の地点精度劣化値とをもとに、その地点グループにおける地点グループ精度劣化値を算出する。
【0075】
総合評価値算出部502は、地点グループ評価値算出部501において算出された地点グループ精度劣化値を全て足し合わせることにより、総合精度劣化値を算出する。
【0076】
以上の構成を有する評価値算出装置500の動作について図13及び図14を参照して説明する。図13は、評価値算出装置500の動作説明に供するフロー図である。図14は、評価値算出装置500の動作説明に供する図である。
【0077】
ステップS601において、地点グループ評価値算出部501は、評価値算出部104において算出された地点精度劣化値情報と、各地点グループの移動パターンとに基づいて、地点グループ毎の地点グループ精度劣化値を算出する。
【0078】
ここで、例えば、監視領域が図14Aに示すような状態である場合、移動方向パターンは、図14Bに示すような構成となる。図14Bに示す地点グループAが、地点Aに対応する地点グループとなる。図14Cに示すように、地点グループAは、地点Aを含め斜めに並ぶ3つの地点からなる地点サブグループA1と、地点Aを含め横に並ぶ3つの地点からなる第2の地点サブグループA2とから構成される。地点サブグループはそれぞれが移動パターンに対応している。これらの移動パターンを表す移動パターン行列は、図14Dに示すh1及びh2となる。h1は、地点サブグループA1に対応しており、移動体が斜め方向に移動するような移動パターンを表す。h2は地点サブグループA2対応しており、移動体が横方向の移動するような移動パターンを表す。移動パターン行列では、移動方向に対応する要素が1となり、他の要素はゼロとなる。
【0079】
そして、地点グループAに含まれる各地点の地点精度劣化値は、図14Eに示されるような形になる。そして、地点グループ評価値算出部501は、図14Fに示すように、h1における要素1に対応する地点精度劣化値をそれぞれ掛け合わせた結果と、h2における要素1に対応する地点精度劣化値を掛け合わせた結果とを加算することにより、地点グループAについての地点グループ精度劣化値を算出する。
【0080】
以上の処理を、監視領域における全ての地点に対応する地点グループで行われる。ステップS601における地点グループ精度劣化値の算出処理は、次の式(4)によって表される。
【数6】
【0081】
図13に戻り、ステップS602において、総合評価値算出部502は、地点グループ評価値算出部501において算出された地点グループ精度劣化値の全てを足し合わせることにより、総合精度劣化値を算出する。ステップS602における総合精度劣化値の算出処理は、次の式(5)によって表される。
【数7】
【0082】
以上のように本実施の形態によれば、評価値算出装置500において、地点グループ評価値算出部501は、評価値算出部104において算出された複数の地点精度劣化値と、センシング領域(ここでは、監視領域)における複数の地点グループに対応する複数の移動パターンとに基づいて、各地点グループの地点グループ精度劣化値を算出する。そして、各地点グループは、複数の地点における1つの注目地点と当該1つの注目地点の周囲に位置する地点群とから構成される。そして、各移動パターンは、対応する地点グループにおける1つ又は複数の地点サブグループから構成される。そして、各地点サブグループは、移動方向ベクトルの方向の差が一定値以内であるような複数の地点から構成される。
【0083】
こうすることにより、センシング対象の移動軌跡が考慮された評価指標である地点グループ精度劣化値を算出でき、そのような地点グループ精度劣化値をもとにした総合精度劣化値を算出することが出来る。
【0084】
[他の実施の形態]
[1]図16は、地点精度劣化値、地点グループ精度劣化値、及び総合精度劣化値の表示例の説明に供する図である。総合精度劣化値は、監視領域の画像における設置位置の周辺に表示すればよい。また、地点精度劣化値又は地点グループ精度劣化値については、監視領域の画像において、所定レベルよりも精度劣化値の大きい地点を目立たせるように表示すればよい。センサ設置作業者は、表示されている各情報を参照することにより、現在の設置位置の良し悪しを判断することができる。また、センサ設置作業者は、設置位置の変更と、その変更後に表示される各情報の確認とを繰り返すことにより、センサの最適な設置位置を決定することができる。
【0085】
[2]上記各実施の形態においては、センサの設置位置を表すパラメータとして、センサの設置位置のみを使用するものとして説明した。しかしながら、これに限定されるものではなく、センサの設置位置を表すパラメータとして、センサの向きの情報を追加してもよい。この場合、センサの向きに応じて、センサの検出対象範囲を限定すればよい。具体的には、センサの検出対象範囲の端に近づくほど、精度が劣化するようにすればよい。
【0086】
[3]上記各実施の形態において、精度劣化特性保持部102に記憶されている精度劣化特性、及び、移動方向パターン保持部103に記憶されている移動方向パターンは、センサ設置支援装置の外部からの入力を行うことにより、書き換え可能にしてもよい。
【0087】
[4]上記各実施の形態においては、移動方向ベクトルの長さを交通量に比例する長さとしたが、これに限定されるものではなく、事故の発生頻度としてもよい。
【0088】
[5]実施の形態2においては、総合評価値算出部401が全ての地点精度劣化値を足し合わせることにより、総合精度劣化値を算出した。しかしながら、これに限定されるものではなく、総合評価値算出部401が全ての地点精度劣化値の平均をとることにより、総合精度劣化値を算出してもよい。また、同様に、実施の形態3における総合評価値算出部502は、全ての地点グループ精度劣化値の平均をとることにより、総合精度劣化値を算出してもよい。
【0089】
[6]上記各実施の形態では、本発明をハードウェアで構成する場合を例にとって説明したが、本発明はハードウェアとの連携においてソフトウェアでも実現することも可能である。
【0090】
また、上記各実施の形態の説明に用いた各機能ブロックは、典型的には集積回路であるLSIとして実現される。これらは個別に1チップ化されてもよいし、一部または全てを含むように1チップ化されてもよい。ここでは、LSIとしたが、集積度の違いにより、IC、システムLSI、スーパーLSI、ウルトラLSIと呼称されることもある。
【0091】
また、集積回路化の手法はLSIに限るものではなく、専用回路または汎用プロセッサで実現してもよい。LSI製造後に、プログラムすることが可能なFPGA(Field Programmable Gate Array)や、LSI内部の回路セルの接続や設定を再構成可能なリコンフィギュラブル・プロセッサーを利用してもよい。
【0092】
さらには、半導体技術の進歩または派生する別技術によりLSIに置き換わる集積回路化の技術が登場すれば、当然、その技術を用いて機能ブロックの集積化を行ってもよい。バイオ技術の適用等が可能性としてありえる。
【産業上の利用可能性】
【0093】
本発明の評価値算出装置及び評価値算出方法は、移動方向が互いに異なる複数の移動体をセンシング対象とする場合でも、センサ設置位置が適切か否かを評価できるものとして有用である。
【符号の説明】
【0094】
100,400,500 評価値算出装置
101 設置位置情報取得部
102 精度劣化特性保持部
103 移動方向パターン保持部
104 評価値算出部
200 センサ設置位置評価システム
201 ユーザ操作入力部
202 表示部
401,502 総合評価値算出部
501 地点グループ評価値算出部
【特許請求の範囲】
【請求項1】
監視領域における移動体をセンシングする複数のセンサの設置位置の適否を判断するための評価値を算出する評価値算出装置であって、
前記複数のセンサの設置位置情報を取得する設置位置情報取得部と、
センサに対する前記移動体の移動方向及びセンサと前記移動体との距離情報のうち少なくとも一方に対するセンサの精度劣化特性を保持する精度劣化特性保持部と、
前記監視領域に含まれる地点における前記移動体の移動方向パターンを保持する移動方向パターン保持部と、
前記複数のセンサの設置位置情報と前記移動方向パターンとに基づいて、前記移動体の前記複数のセンサに対する移動方向及び前記移動体と前記複数のセンサのそれぞれとの距離情報のうち少なくとも一方を算出し、算出された前記移動方向及び前記距離情報のうち少なくとも一方と前記精度劣化特性とに基づいて、前記監視領域に含まれる地点に対する前記複数のセンサの精度劣化値を前記評価値として算出する評価値算出部と、
を備える評価値算出装置。
【請求項2】
前記監視領域における1つの地点を注目地点とし、前記注目地点の近傍に存在する複数の地点のうち、移動ベクトルの向きの差が一定値以内の複数の地点を前記注目地点に対する連続地点とし、前記注目地点の精度劣化度合いと前記連続地点の精度劣化度合いとを積算することにより、前記注目地点における精度劣化度合いを算出する第2の評価値算出部をさらに具備する、
請求項1に記載の評価値算出装置。
【請求項3】
前記算出された複数の前記精度劣化度合いの全てを加算することにより、前記監視領域全体の精度劣化度合いを算出する第3の評価値算出部をさらに具備する、
請求項1または請求項2に記載の評価値算出装置。
【請求項4】
前記算出された複数の前記精度劣化度合いの平均をとることにより、前記監視領域全体の精度劣化度合いを算出する第4の評価値算出部をさらに具備する、
請求項1または請求項2に記載の評価値算出装置。
【請求項5】
監視領域における移動体をセンシングする複数のセンサの設置位置の適否を判断するための評価値を算出する評価値算出方法であって、
設置位置情報取得部は、前記複数のセンサの設置位置情報を取得し、
評価値算出部は、前記設置位置情報取得部から前記複数のセンサの設置位置情報を取得し、前記設置位置情報と、前記監視領域に含まれる地点における前記移動体の移動方向パターンとに基づいて、前記移動体の前記複数のセンサに対する移動方向及び前記移動体と前記複数のセンサのそれぞれとの距離情報のうち少なくとも一方を算出し、算出された前記移動方向及び前記距離情報のうち少なくとも一方と、予め算出された、センサに対する前記移動体の移動方向及びセンサと前記移動体との距離情報のうち少なくとも一方に対するセンサの精度劣化特性とに基づいて、前記監視領域に含まれる地点に対する前記複数のセンサの精度劣化値を前記評価値として算出する、
評価値算出方法。
【請求項1】
監視領域における移動体をセンシングする複数のセンサの設置位置の適否を判断するための評価値を算出する評価値算出装置であって、
前記複数のセンサの設置位置情報を取得する設置位置情報取得部と、
センサに対する前記移動体の移動方向及びセンサと前記移動体との距離情報のうち少なくとも一方に対するセンサの精度劣化特性を保持する精度劣化特性保持部と、
前記監視領域に含まれる地点における前記移動体の移動方向パターンを保持する移動方向パターン保持部と、
前記複数のセンサの設置位置情報と前記移動方向パターンとに基づいて、前記移動体の前記複数のセンサに対する移動方向及び前記移動体と前記複数のセンサのそれぞれとの距離情報のうち少なくとも一方を算出し、算出された前記移動方向及び前記距離情報のうち少なくとも一方と前記精度劣化特性とに基づいて、前記監視領域に含まれる地点に対する前記複数のセンサの精度劣化値を前記評価値として算出する評価値算出部と、
を備える評価値算出装置。
【請求項2】
前記監視領域における1つの地点を注目地点とし、前記注目地点の近傍に存在する複数の地点のうち、移動ベクトルの向きの差が一定値以内の複数の地点を前記注目地点に対する連続地点とし、前記注目地点の精度劣化度合いと前記連続地点の精度劣化度合いとを積算することにより、前記注目地点における精度劣化度合いを算出する第2の評価値算出部をさらに具備する、
請求項1に記載の評価値算出装置。
【請求項3】
前記算出された複数の前記精度劣化度合いの全てを加算することにより、前記監視領域全体の精度劣化度合いを算出する第3の評価値算出部をさらに具備する、
請求項1または請求項2に記載の評価値算出装置。
【請求項4】
前記算出された複数の前記精度劣化度合いの平均をとることにより、前記監視領域全体の精度劣化度合いを算出する第4の評価値算出部をさらに具備する、
請求項1または請求項2に記載の評価値算出装置。
【請求項5】
監視領域における移動体をセンシングする複数のセンサの設置位置の適否を判断するための評価値を算出する評価値算出方法であって、
設置位置情報取得部は、前記複数のセンサの設置位置情報を取得し、
評価値算出部は、前記設置位置情報取得部から前記複数のセンサの設置位置情報を取得し、前記設置位置情報と、前記監視領域に含まれる地点における前記移動体の移動方向パターンとに基づいて、前記移動体の前記複数のセンサに対する移動方向及び前記移動体と前記複数のセンサのそれぞれとの距離情報のうち少なくとも一方を算出し、算出された前記移動方向及び前記距離情報のうち少なくとも一方と、予め算出された、センサに対する前記移動体の移動方向及びセンサと前記移動体との距離情報のうち少なくとも一方に対するセンサの精度劣化特性とに基づいて、前記監視領域に含まれる地点に対する前記複数のセンサの精度劣化値を前記評価値として算出する、
評価値算出方法。
【図1】

【図5】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図15】
【図16】
【図2】
【図3】
【図4】
【図6】
【図14】
【図5】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図15】
【図16】
【図2】
【図3】
【図4】
【図6】
【図14】
【公開番号】特開2013−97532(P2013−97532A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239043(P2011−239043)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]