
超音波モータ
【課題】 温度上昇に伴う回転効率の低下を防止した超音波モータを提供する。
【解決手段】 櫛歯体12を備えるステータ1と、櫛歯体12の圧接面12aに圧接される圧接面21aを有する回転可能なロータ2と、ステータ1とロータ2を圧接させるための弾性手段16とを備え、両圧接面の少なくとも一方に温度変化によって摩擦係数が変化する樹脂膜4を有する超音波モータであって、温度変化に伴って弾性手段16の弾性力を変化させ、樹脂膜4の圧接面4aにおける摩擦力をほぼ一定に保持させる圧接力調整手段として形状記憶合金で弾性手段16を構成する。温度上昇して樹脂膜4の摩擦係数が低下した場合でも、圧接力調整手段により圧接力を増大し、樹脂膜4の圧接面4aでの摩擦力をほぼ一定に保持し、温度変化に伴う回転効率の低下を防止する。
【解決手段】 櫛歯体12を備えるステータ1と、櫛歯体12の圧接面12aに圧接される圧接面21aを有する回転可能なロータ2と、ステータ1とロータ2を圧接させるための弾性手段16とを備え、両圧接面の少なくとも一方に温度変化によって摩擦係数が変化する樹脂膜4を有する超音波モータであって、温度変化に伴って弾性手段16の弾性力を変化させ、樹脂膜4の圧接面4aにおける摩擦力をほぼ一定に保持させる圧接力調整手段として形状記憶合金で弾性手段16を構成する。温度上昇して樹脂膜4の摩擦係数が低下した場合でも、圧接力調整手段により圧接力を増大し、樹脂膜4の圧接面4aでの摩擦力をほぼ一定に保持し、温度変化に伴う回転効率の低下を防止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は超音波モータに関し、特に温度変化に伴う回転効率の変動防止を図った超音波モータに関するものである。
【背景技術】
【0002】
超音波モータは、複数に分極した圧電体を円周配置したステータと、このステータに所定の圧力で当接した回転可能な円板状あるいは円環状のロータとで構成され、ステータの圧電体に高周波電圧を印加して圧電体を振動させ、この振動を圧電体と一体的に設けた櫛歯体によって円周方向に拡大させて櫛歯体を円周方向に向けて進行波動作させることで、圧電体に摩擦係合しているロータを軸回り方向に回転動作させるものである。ステータの櫛歯体は振幅を拡大する機能を有しているが、通常振幅は1〜3μmなのでロータの回転効率(ステータの振動エネルギに対するロータの回転エネルギ)を高めるためには、ステータの櫛歯体に対してロータを円周方向及び径方向に偏りなく密接させ、かつ櫛歯体とロータの両密接面に所要の圧接力を加えて圧接面として構成することが必要である。そのため、超音波モータを長時間駆動させない状態が続くと、当該圧接力によって櫛歯体とロータの圧接面が界面接着の状態になって、いわゆる静摩擦力が大きくなり、超音波モータを始動する際にロータを回転させるのに大きなトルクが必要になり、回転のスムーズな立ち上げができなくなり、あるいは極端な場合にはモータの回転が不能になることがある。
【0003】
このようなモータ回転始動時における問題を満たすために、櫛歯体とロータの圧接面のいずれか一方に両圧接面間での静摩擦力を抑制するために低摩擦係数の樹脂層を形成することが考えられている。この樹脂層としては、例えばPTFE(四フッ化エチレン)等のフッ素樹脂が考えられる。特許文献1ではロータの表面に高分子樹脂からなるスライダを接着する技術が提案されており、この特許文献1の技術でも当該スライダによって櫛歯体とロータの圧接面での静摩擦力を低減することが可能であると考えられる。
【特許文献1】特開平9−98587号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
このように、櫛歯体とロータの圧接面に低摩擦係数の樹脂層を形成することにより、両圧接面間の静摩擦力を低減し、超音波モータの回転始動時における回転のスムーズな立ち上げには有効である。しかし、この種の樹脂は温度変化によって摩擦係数が変化する性質があり、特に温度が上昇すると摩擦係数が常温よりも低下する性質のものがある。前記したPTFEはこの性質を備えている。このような樹脂層を形成した超音波モータでは、回転駆動に伴って櫛歯体とロータとの間の摩擦熱により樹脂層の温度が上昇したときに、樹脂層の摩擦係数が必要以上に低下され、これにより櫛歯体とロータの両圧接面が滑り易い状態となってしまう。そのため櫛歯体の進行波動作が効率良くロータに伝わりにくくなり、結果としてロータの回転効率、すなわち超音波モータの回転効率、ないしは回転トルクが低下してしまうという問題が生じることになる。
【0005】
本発明の目的は、特にモータを駆動したときの温度上昇によっても回転効率が低下することがない超音波モータを提供するものである。
【課題を解決するための手段】
【0006】
本発明は、圧電体及び円周方向に配列した多数の櫛歯を有する櫛歯体を備えるステータと、櫛歯体の表面に圧接される圧接面を有する回転可能なロータと、ステータとロータを圧接させるための弾性手段とを備え、ステータとロータの少なくとも一方の圧接面に温度変化によって摩擦係数が変化する樹脂膜を有する超音波モータであって、温度変化に伴って弾性手段の弾性力を変化させ、樹脂膜の表面における摩擦力をほぼ一定に保持させる圧接力調整手段を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、温度変化により圧接力調整手段によりステータとロータとの圧接力を調整することで、温度変化により樹脂膜の摩擦係数が変化した場合でも、圧接力と摩擦係数の積で示される樹脂膜の表面での摩擦力をほぼ一定に保持させることができ、ステータからロータへの回転力の伝達効率をほぼ一定に保持し、超音波モータの温度変化に伴う回転効率の低下を防止する。
【発明を実施するための最良の形態】
【0008】
本発明の好ましい第1の形態は、弾性手段はステータとロータとの間に介挿された圧縮コイルスプリングであり、圧接力調整手段は温度変化によって自然コイル長が変化する形状記憶材料で形成された当該圧縮コイルスプリングで構成される。温度変化によって圧縮コイルスプリングの自然コイル長が変化されるので、温度変化によって圧縮コイルスプリングによるステータとロータとの圧接力を調整し、樹脂膜における摩擦力をほぼ一定に保持することができる。
【0009】
本発明の好ましい第2の形態は、弾性手段はステータとロータとの間に弾性的に介挿された圧縮コイルスプリングであり、圧接力調整手段は圧縮コイルスプリングの内挿コイル長を温度変化に追従して変化させる構成であり、特に、圧接力調整手段は圧縮コイルスプリングの少なくとも一方の端部を温度変化に追従してコイル長方向に位置変化させることにより自然コイル長を変化させる。温度変化によって圧縮コイルスプリングのコイル長が変化されるので、温度変化によって圧縮コイルスプリングによるステータとロータとの圧接力を調整し、樹脂膜における摩擦力をほぼ一定に保持することができる。
【0010】
前記第2の形態において、一つの形態として、弾性手段はステータに設けられてロータを回転可能に支持する軸受筒内に弾性的に介挿された圧縮コイルスプリングであり、圧接力調整手段は温度変化によって当該軸受筒の実質的な筒軸長が変化する形状記憶材料で形成する。また、第2の形態において、他の形態として、弾性手段は前記ステータに設けられた軸受筒と、ロータを回転可能に支持して軸受筒内に支持される玉軸受との間に内挿された圧縮コイルスプリングであり、圧接力調整手段は玉軸受を圧縮コイルスプリングの軸方向に移動させる係止部材で構成し、当該係止部材を温度変化によって玉軸受を移動させて圧縮コイルスプリングの内挿コイル長を変化させる形状記憶材料で形成する。
【実施例1】
【0011】
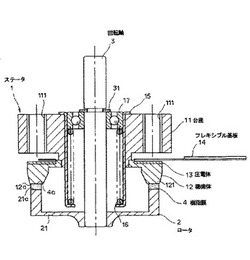
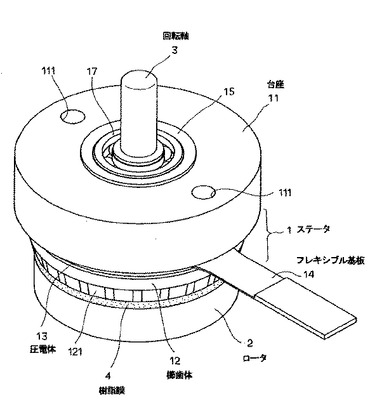
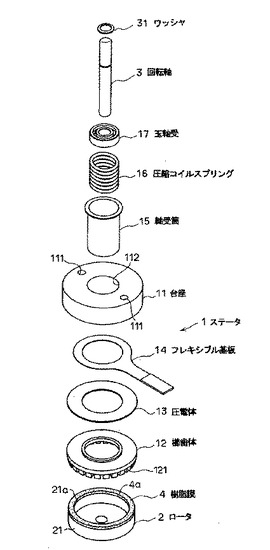
次に、本発明の実施例を図面を参照して説明する。図1は本発明の実施例1の超音波モータの外観斜視図、図2はその縦断面図である。また、図3は部分分解斜視図である。これらの図において、モータ取付用の取付穴111を有する円板状の台座11の下側に円周方向に複数の櫛歯121を配列した短円筒容器状の櫛歯体12が一体に設けられており、この櫛歯体12の上面には前記櫛歯121に対応して円周方向に複数に分極された円形薄板状の圧電体13が一体的に搭載され、これら台座11と圧電体13と櫛歯体12とでステータ1が構成される。前記圧電体13にはフレキシブル基板14を介して高周波電圧が印加されるようになっている。前記台座11の中心には軸穴112が開口され、内周面に円筒状の軸受筒15が固定されている。また、この軸受筒15内の上端部には玉軸受17が内装され、この玉軸受17によって回転軸3が軸支され、ワッシャ31により抜け止めされる。この回転軸3の下端部にはロータ2が取着されている。ロータ2は周壁部21の上端面、すなわち圧接面21aには樹脂膜4が形成されており、この樹脂膜4が前記櫛歯体12の表面、換言すれば櫛歯121の表面12aに当接すべく短円筒状に形成されている。また、軸受筒15の下端部と前記玉軸受17との軸方向の間に圧縮コイルスプリング16が内挿されており、この圧縮コイルスプリング16の軸方向の弾性力によって玉軸受17及びこれを支持している回転軸3を上方向に付勢し、ロータ2の周壁部21の圧接面21a、ここでは当該圧接面21aに設けた樹脂膜4の圧接面4aをステータ1の櫛歯体12の表面12aに向けて付勢している。
【0012】
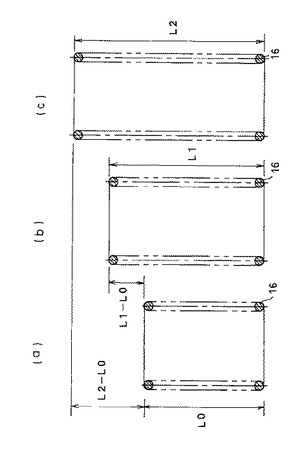
ここで、前記樹脂膜4はPTFE(四フッ化エチレン)で構成されて前記ロータ2の圧接面21aに所要の厚さに塗布されて形成されており、この樹脂膜4の表面の潤滑性によって櫛歯体12の圧接面12aと樹脂膜4の圧接面4a間の静摩擦係数を低減するようになっている。また、本発明にかかる圧接力調整手段を構成するために、前記軸受筒15内に内挿されている前記圧縮コイルスプリング16は形状記憶合金からなる線材で構成されている。この圧縮コイルスプリング16は、図4(a)に示す内挿コイル長L0となるように軸受筒15内にコイル長を短くして圧縮した状態で内挿されている。この圧縮コイルスプリング16は形状記憶作用によって、前記軸受筒15から取り外したときの自然コイル長は、常温(約20℃前後)では図4(b)のコイル長L1となるように形成されているが、臨界温度を越えた高温(約50〜100℃)では図4(c)に示すように、自然コイル長L1よりも長い自然コイル長L2となるように形成されている。前記自然コイル長L2と自然コイル長L1の関係は、(L2−L0)が(L1−L0)のほぼ2倍となるように設定されている。
【0013】
この実施例1の超音波モータでは、フレキシブル基板14を通して圧電体13に高周波電圧を印加すると、圧電体13が振動し、これと一体の櫛歯体12が振動し、円周方向に配列されている複数の櫛歯121が円周方向に変位される。圧縮コイルスプリング16の付勢力によってロータ2の圧接面21aは樹脂膜4を介して櫛歯体12の表面12aに圧接されているため、この圧接によってロータ2の樹脂膜4の圧接面4aと櫛歯体12の表面12aに生じる摩擦力によって樹脂膜4を設けているロータ2が円周方向に移動され、ロータ2及びこれを支持している回転軸3が回転される。回転軸3の回転力は回転軸3に取着された図には表れない歯車を介して外部に伝達される。
【0014】
このとき、ロータ2の圧接面21aはステータ1の櫛歯体12の表面12aには直接圧接されておらず樹脂膜4が介在されているため、ロータ2とステータ1の金属同士が直接接触することがなく回転騒音が抑制され、静粛な回転動作が行われる。また、櫛歯体12とロータ2の両圧接面の間にはPTFEからなる樹脂膜4が存在しており、この樹脂膜4の圧接面4aにおける摩擦係数は金属よりも小さいため、これら圧接面12aと4aの間の摩擦係数は櫛歯体12の圧接面12aとロータ2の圧接面21aが直接接触するよりも低減され、特に超音波モータを始動する際の静摩擦係数を低下し、スムーズな回転始動が可能になる。
【0015】
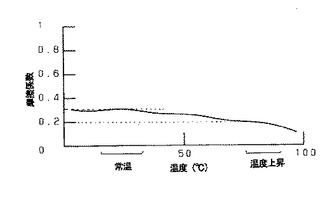
ところで、超音波モータの回転駆動に伴って発生する熱によりロータ2、ないし超音波モータ全体の温度が上昇すると、これに伴って樹脂膜4の温度も上昇する。樹脂膜4の摩擦係数は前述したように温度の依存性があり、PTFEの場合には図5に示すように温度の上昇に伴って摩擦係数が低下する。そのため、超音波モータの温度の上昇に伴って櫛歯体12とロータ2との間の摩擦係数も樹脂膜4の圧接面4aでの摩擦係数の低下に伴って低下し、両圧接面12aと4aは滑り易い状態になる。そのため、櫛歯体12からロータ2に向けての円周方向の変位の伝達効率が低下し、結果として超音波モータの回転効率が低下してしまうことになる。しかし、実施例1では、超音波モータの温度上昇に伴って圧縮コイルスプリング16の温度が上昇し、形状記憶合金の臨界温度を越えると、圧縮コイルスプリング16の自然コイル長はそれまでのL1からL2に伸長する。一般に圧縮コイルスプリングのバネ係数は長さの変化にかかわらず一定であるので、圧縮コイルスプリング16のバネ特性がリニアであるとした場合には、圧縮コイルスプリング16のバネ力はF倍〔F=(L2−L0)/(L1−L0)〕となり、この実施例の場合にはF=2となる。これにより、圧縮コイルスプリング16によってロータ2に設けた樹脂膜4の圧接面4aと櫛歯体12の圧接面12aとの間の圧接力はほぼ2倍になる。一方、図5に示したように、樹脂膜4は常温からの温度上昇に伴って摩擦係数がほぼ0.3から0.15と、ほぼ1/2に低下するため、櫛歯体12と樹脂膜4との間の摩擦力(摩擦力=圧接力×摩擦係数)はほぼ一定の値に保たれることになる。すなわち、超音波モータの温度上昇に伴って樹脂膜4の摩擦係数が低下しても、櫛歯体12とロータ2との間の圧接力が増大するため、結果として櫛歯体12と樹脂膜4、すなわちロータ2との間の摩擦力はほぼ一定に保たれることになり、結果として超音波モータにおける回転効率をほぼ一定に保ち、回転効率が低下することはない。
【0016】
なお、超音波モータの駆動が停止され、超音波モータの温度が常温にまで低下すると、樹脂膜4の摩擦係数は増加し、代わりに圧縮コイルスプリング16が臨界温度よりも低下して自然コイル長がL2からL1に短縮されてバネ力が低下されるため、この場合にも櫛歯体12と樹脂膜4との間の摩擦力はほぼ一定に保持され、回転効率が低下することはない。
【実施例2】
【0017】
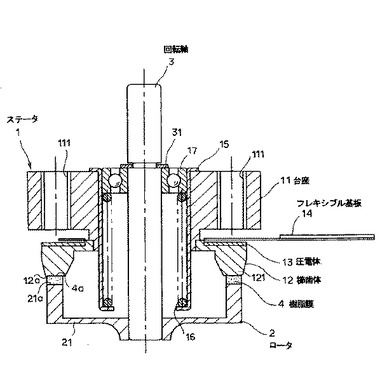
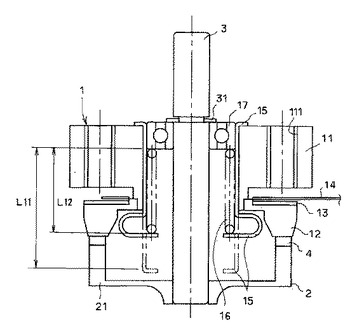
実施例1では本発明における圧接力調整手段を圧縮コイルスプリング16で構成し、当該圧縮コイルスプリング16を形状記憶合金で形成してその自然コイル長を温度により変化させることで櫛歯体12と樹脂膜4との間の圧接力を変化させているが、圧接力調整手段として温度変化に応じて圧縮コイルスプリング16の軸受筒15内における内挿コイル長を変化させて圧接力を変化させる手段で構成してもよい。図6は実施例2の構造例であり、実施例1と同一部分には同一符号を付して説明は省略する。この実施例2では圧接力調整手段として軸受筒15を形状記憶合金で形成し、軸受筒15の図示下側の下端部15aを温度変化によって変形させ、当該軸受筒15の下端部15aと、軸受筒15の上端部に固定している玉軸受17との間に内挿されている圧縮コイルスプリング16の内挿コイル長を変化させるように構成している。ここで、軸受筒15は、臨界温度よりも低温の常温のときには図6の鎖線で示すように軸受筒15の下端部15aが伸長して軸受筒長を長くし、圧縮コイルスプリングの内挿コイル長L11が長くなる形状となる。また、臨界温度以上のときには同図の実線で示すように下端部15aを外側に突出するように湾曲変形して軸受筒長を短くし、圧縮コイルスプリング16の内挿コイル長L12が短くなる形状となるように形成している。ここで、内挿コイル長L11とL12は、各コイル長のときの圧縮コイルスプリング16によって生じるバネ力、すなわち櫛歯体12と樹脂膜4との間の圧接力が2倍に変化するように設計されている。なお、圧縮コイルスプリング16はそれ自体は通常のバネ線材で形成されている。
【0018】
実施例2では、超音波モータが駆動を始める際には、図6の鎖線のように軸受筒15は下端部15aが伸長して圧縮コイルスプリング16の内挿コイル長L11は長い状態にあるので、圧縮コイルスプリング16のバネ力は小さく、当該圧縮コイルスプリング16による櫛歯体12と樹脂膜4との間の圧接力は低い状態にある。このとき、樹脂膜4の摩擦係数は大きいため、低い圧接力でも所定の摩擦力を得て、所定の回転効率が得られる。一方、超音波モータが駆動して温度が上昇し、樹脂膜4の摩擦係数が低下するが、軸受筒15の温度上昇に伴って臨界温度に達した時点で軸受筒15の下端部15aが図6の実線のように上方に短縮するように変形され、内挿されている圧縮コイルスプリング16の内挿コイル長がL12に縮小し、圧縮コイルスプリング16のバネ力が増大し、櫛歯体12と樹脂膜4との間の圧接力が増加する。これにより、温度上昇に伴う樹脂膜4の摩擦係数の低下にかかわらず、圧接力の増加によって摩擦力が増加され、所定の回転効率が保持されることになる。
【実施例3】
【0019】
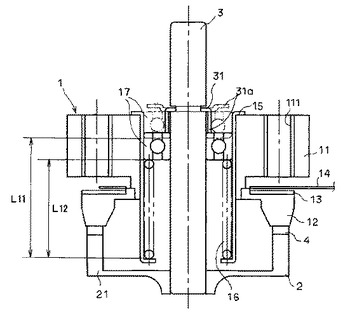
実施例3は実施例2と同様の趣旨で、温度変化に応じて圧縮コイルスプリング16の軸受筒15内における内挿コイル長を変化させて圧接力を変化させている。図7は実施例3の構造例であり、実施例1,2と同一部分には同一符号を付してある。この実施例3では本発明における圧接力調整手段として、軸受筒15の上端部内に配設している玉軸受17を回転軸3に対して係止しているワッシャ31を形状記憶合金で形成し、このワッシャ31の外径寸法を実施例1,2よりも大径に形成するとともに、外径部31aを温度変化によって軸方向に変形させるように構成している。すなわち、ワッシャ31は臨界温度よりも低温のときには図7の鎖線で示すように外径部31aが軸方向と直交する方向に真直状態となり、玉軸受17は圧縮コイルスプリング16のバネ力によって軸方向の上方位置に位置され、結果として圧縮コイルスプリング16の内挿コイル長L11が長くなる。臨界温度よりも高温のときには図7の実線のように外径部31aを軸方向に沿った方向に曲げ変形し、玉軸受17を圧縮コイルスプリング16のバネ力に抗して軸方向下方に移動させ、圧縮コイルスプリング16の内挿コイル長L12を短くする。これにより、ワッシャ31の外径部31aによって玉軸受17の軸方向の位置を変化させ、圧縮コイルスプリング16を内挿している軸受筒15の実質的な長さを変化させ、圧縮コイルスプリングのバネ力を変化させる。ここで、内挿コイル長L11とL12は、各コイル長のときに圧縮コイルスプリング16のバネ力、すなわち櫛歯体12と樹脂膜4との間の圧接力が2倍に変化するように設計されている。なお、圧縮コイルスプリング16は通常のバネ線材で形成されている。
【0020】
実施例3では、超音波モータが始動する際には、図7の鎖線のようにワッシャ31は外径部31aが水平方向に伸長して玉軸受17は上方に位置されて圧縮コイルスプリング16の内挿コイル長L11は長い状態にあるので、圧縮コイルスプリング16による櫛歯体12と樹脂膜4との間の圧接力は低い状態にある。このとき、樹脂膜4の摩擦係数は大きいため、低い圧接力でも所定の摩擦力を得て、所定の回転効率が得られる。一方、超音波モータが駆動して温度が上昇し、樹脂膜4の摩擦係数が低下するが、図7の実線のようにワッシャ31が臨界温度に達した時点で外径部31aが下方に変形して玉軸受17を下方に移動し、圧縮コイルスプリング16の内挿コイル長がL12に縮小し、圧縮コイルスプリング16のバネ力が増加し、櫛歯体12と樹脂膜4との間の圧接力が増加する。これにより、温度上昇に伴う樹脂膜4の摩擦係数の低下にかかわらず、圧接力の増加によって樹脂膜4において所定の摩擦力が得られ、所定の回転効率が保持されることになる。
【0021】
ここで、実施例1〜3ではそれぞれ圧縮コイルスプリング16、軸受筒15、ワッシャ31を形状記憶合金で形成した例を示したが、実施例2の場合には軸受筒15を、また実施例3の場合にはワッシャ31をそれぞれ温度変化に伴って連続的に変形するバイメタルで構成してもよい。このようにすれば、温度変化に伴ってバイメタルで構成された軸受筒15の下端部31aやワッシャ31の外径部31aが連続的に変形されるため、圧縮コイルスプリング16の内挿コイル長を連続的に変化させることができる。これにより、図5に示したように温度変化に伴って連続的に変化する樹脂膜4の摩擦係数の変化に追従して圧縮コイルスプリング16による樹脂膜4での圧接力を変化させ、全温度変化範囲にわたって回転効率をほぼ一定に保持した超音波モータを実現することも可能である。
【0022】
また、本発明は実施例1,2,3の構成をそれぞれ単独に構成するのに限られるものではなく、実施例1,2,3の構成及びバイメタルの構成を適宜に組み合わせることにより、温度変化に対してさらに有効な回転効率の超音波モータを実現することも可能である。また、圧接力を得るための弾性手段は実施例1〜3の圧縮コイルスプリングに限られるものではなく、板バネ等を用いて構成された超音波モータの場合でも温度変化に追従してバネ力を変化するように構成すればよい。
【0023】
さらに、樹脂膜は実施例のPTFEに限られるものではなく、PFA(四フッ化エチレン・パーフロロアルキルビニルエーテル共重合体)、FEP(四フッ化エチレン・六フッ化プロピレン共重合体)のいずれか、又はこれらの混合物であってもよい。
【0024】
また、本発明は、樹脂膜が実施例1〜3の場合とは逆に、温度が上昇したときに摩擦係数が増加する温度摩擦係数特性を有する樹脂膜を用いた超音波モータへの適用も可能であり、この場合には温度が上昇したときに圧縮コイルスプリングによる圧接力が低減するように構成すればよい。
【図面の簡単な説明】
【0025】
【図1】実施例1の超音波モータの外観斜視図である。
【図2】図1の超音波モータの軸方向の断面図である。
【図3】図1の超音波モータの部分分解斜視図である。
【図4】圧縮コイルスプリングのコイル長を示す図である。
【図5】樹脂膜における摩擦係数の温度異存性を示す図である。
【図6】実施例2の超音波モータの断面図である。
【図7】実施例3の超音波モータの断面図である。
【符号の説明】
【0026】
1 ステータ
2 ロータ
3 回転軸
4 樹脂膜
4a 圧接面(樹脂膜)
11 台座
12 櫛歯体
12a 圧接面(櫛歯体)
13 圧電体
14 フレキシブル基板
15 軸受筒
15a 下端部
16 圧縮コイルスプリング
17 玉軸受
21 周壁部
21a 圧接面(ロータ)
31 ワッシャ
31a 外径部
【技術分野】
【0001】
本発明は超音波モータに関し、特に温度変化に伴う回転効率の変動防止を図った超音波モータに関するものである。
【背景技術】
【0002】
超音波モータは、複数に分極した圧電体を円周配置したステータと、このステータに所定の圧力で当接した回転可能な円板状あるいは円環状のロータとで構成され、ステータの圧電体に高周波電圧を印加して圧電体を振動させ、この振動を圧電体と一体的に設けた櫛歯体によって円周方向に拡大させて櫛歯体を円周方向に向けて進行波動作させることで、圧電体に摩擦係合しているロータを軸回り方向に回転動作させるものである。ステータの櫛歯体は振幅を拡大する機能を有しているが、通常振幅は1〜3μmなのでロータの回転効率(ステータの振動エネルギに対するロータの回転エネルギ)を高めるためには、ステータの櫛歯体に対してロータを円周方向及び径方向に偏りなく密接させ、かつ櫛歯体とロータの両密接面に所要の圧接力を加えて圧接面として構成することが必要である。そのため、超音波モータを長時間駆動させない状態が続くと、当該圧接力によって櫛歯体とロータの圧接面が界面接着の状態になって、いわゆる静摩擦力が大きくなり、超音波モータを始動する際にロータを回転させるのに大きなトルクが必要になり、回転のスムーズな立ち上げができなくなり、あるいは極端な場合にはモータの回転が不能になることがある。
【0003】
このようなモータ回転始動時における問題を満たすために、櫛歯体とロータの圧接面のいずれか一方に両圧接面間での静摩擦力を抑制するために低摩擦係数の樹脂層を形成することが考えられている。この樹脂層としては、例えばPTFE(四フッ化エチレン)等のフッ素樹脂が考えられる。特許文献1ではロータの表面に高分子樹脂からなるスライダを接着する技術が提案されており、この特許文献1の技術でも当該スライダによって櫛歯体とロータの圧接面での静摩擦力を低減することが可能であると考えられる。
【特許文献1】特開平9−98587号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
このように、櫛歯体とロータの圧接面に低摩擦係数の樹脂層を形成することにより、両圧接面間の静摩擦力を低減し、超音波モータの回転始動時における回転のスムーズな立ち上げには有効である。しかし、この種の樹脂は温度変化によって摩擦係数が変化する性質があり、特に温度が上昇すると摩擦係数が常温よりも低下する性質のものがある。前記したPTFEはこの性質を備えている。このような樹脂層を形成した超音波モータでは、回転駆動に伴って櫛歯体とロータとの間の摩擦熱により樹脂層の温度が上昇したときに、樹脂層の摩擦係数が必要以上に低下され、これにより櫛歯体とロータの両圧接面が滑り易い状態となってしまう。そのため櫛歯体の進行波動作が効率良くロータに伝わりにくくなり、結果としてロータの回転効率、すなわち超音波モータの回転効率、ないしは回転トルクが低下してしまうという問題が生じることになる。
【0005】
本発明の目的は、特にモータを駆動したときの温度上昇によっても回転効率が低下することがない超音波モータを提供するものである。
【課題を解決するための手段】
【0006】
本発明は、圧電体及び円周方向に配列した多数の櫛歯を有する櫛歯体を備えるステータと、櫛歯体の表面に圧接される圧接面を有する回転可能なロータと、ステータとロータを圧接させるための弾性手段とを備え、ステータとロータの少なくとも一方の圧接面に温度変化によって摩擦係数が変化する樹脂膜を有する超音波モータであって、温度変化に伴って弾性手段の弾性力を変化させ、樹脂膜の表面における摩擦力をほぼ一定に保持させる圧接力調整手段を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、温度変化により圧接力調整手段によりステータとロータとの圧接力を調整することで、温度変化により樹脂膜の摩擦係数が変化した場合でも、圧接力と摩擦係数の積で示される樹脂膜の表面での摩擦力をほぼ一定に保持させることができ、ステータからロータへの回転力の伝達効率をほぼ一定に保持し、超音波モータの温度変化に伴う回転効率の低下を防止する。
【発明を実施するための最良の形態】
【0008】
本発明の好ましい第1の形態は、弾性手段はステータとロータとの間に介挿された圧縮コイルスプリングであり、圧接力調整手段は温度変化によって自然コイル長が変化する形状記憶材料で形成された当該圧縮コイルスプリングで構成される。温度変化によって圧縮コイルスプリングの自然コイル長が変化されるので、温度変化によって圧縮コイルスプリングによるステータとロータとの圧接力を調整し、樹脂膜における摩擦力をほぼ一定に保持することができる。
【0009】
本発明の好ましい第2の形態は、弾性手段はステータとロータとの間に弾性的に介挿された圧縮コイルスプリングであり、圧接力調整手段は圧縮コイルスプリングの内挿コイル長を温度変化に追従して変化させる構成であり、特に、圧接力調整手段は圧縮コイルスプリングの少なくとも一方の端部を温度変化に追従してコイル長方向に位置変化させることにより自然コイル長を変化させる。温度変化によって圧縮コイルスプリングのコイル長が変化されるので、温度変化によって圧縮コイルスプリングによるステータとロータとの圧接力を調整し、樹脂膜における摩擦力をほぼ一定に保持することができる。
【0010】
前記第2の形態において、一つの形態として、弾性手段はステータに設けられてロータを回転可能に支持する軸受筒内に弾性的に介挿された圧縮コイルスプリングであり、圧接力調整手段は温度変化によって当該軸受筒の実質的な筒軸長が変化する形状記憶材料で形成する。また、第2の形態において、他の形態として、弾性手段は前記ステータに設けられた軸受筒と、ロータを回転可能に支持して軸受筒内に支持される玉軸受との間に内挿された圧縮コイルスプリングであり、圧接力調整手段は玉軸受を圧縮コイルスプリングの軸方向に移動させる係止部材で構成し、当該係止部材を温度変化によって玉軸受を移動させて圧縮コイルスプリングの内挿コイル長を変化させる形状記憶材料で形成する。
【実施例1】
【0011】
次に、本発明の実施例を図面を参照して説明する。図1は本発明の実施例1の超音波モータの外観斜視図、図2はその縦断面図である。また、図3は部分分解斜視図である。これらの図において、モータ取付用の取付穴111を有する円板状の台座11の下側に円周方向に複数の櫛歯121を配列した短円筒容器状の櫛歯体12が一体に設けられており、この櫛歯体12の上面には前記櫛歯121に対応して円周方向に複数に分極された円形薄板状の圧電体13が一体的に搭載され、これら台座11と圧電体13と櫛歯体12とでステータ1が構成される。前記圧電体13にはフレキシブル基板14を介して高周波電圧が印加されるようになっている。前記台座11の中心には軸穴112が開口され、内周面に円筒状の軸受筒15が固定されている。また、この軸受筒15内の上端部には玉軸受17が内装され、この玉軸受17によって回転軸3が軸支され、ワッシャ31により抜け止めされる。この回転軸3の下端部にはロータ2が取着されている。ロータ2は周壁部21の上端面、すなわち圧接面21aには樹脂膜4が形成されており、この樹脂膜4が前記櫛歯体12の表面、換言すれば櫛歯121の表面12aに当接すべく短円筒状に形成されている。また、軸受筒15の下端部と前記玉軸受17との軸方向の間に圧縮コイルスプリング16が内挿されており、この圧縮コイルスプリング16の軸方向の弾性力によって玉軸受17及びこれを支持している回転軸3を上方向に付勢し、ロータ2の周壁部21の圧接面21a、ここでは当該圧接面21aに設けた樹脂膜4の圧接面4aをステータ1の櫛歯体12の表面12aに向けて付勢している。
【0012】
ここで、前記樹脂膜4はPTFE(四フッ化エチレン)で構成されて前記ロータ2の圧接面21aに所要の厚さに塗布されて形成されており、この樹脂膜4の表面の潤滑性によって櫛歯体12の圧接面12aと樹脂膜4の圧接面4a間の静摩擦係数を低減するようになっている。また、本発明にかかる圧接力調整手段を構成するために、前記軸受筒15内に内挿されている前記圧縮コイルスプリング16は形状記憶合金からなる線材で構成されている。この圧縮コイルスプリング16は、図4(a)に示す内挿コイル長L0となるように軸受筒15内にコイル長を短くして圧縮した状態で内挿されている。この圧縮コイルスプリング16は形状記憶作用によって、前記軸受筒15から取り外したときの自然コイル長は、常温(約20℃前後)では図4(b)のコイル長L1となるように形成されているが、臨界温度を越えた高温(約50〜100℃)では図4(c)に示すように、自然コイル長L1よりも長い自然コイル長L2となるように形成されている。前記自然コイル長L2と自然コイル長L1の関係は、(L2−L0)が(L1−L0)のほぼ2倍となるように設定されている。
【0013】
この実施例1の超音波モータでは、フレキシブル基板14を通して圧電体13に高周波電圧を印加すると、圧電体13が振動し、これと一体の櫛歯体12が振動し、円周方向に配列されている複数の櫛歯121が円周方向に変位される。圧縮コイルスプリング16の付勢力によってロータ2の圧接面21aは樹脂膜4を介して櫛歯体12の表面12aに圧接されているため、この圧接によってロータ2の樹脂膜4の圧接面4aと櫛歯体12の表面12aに生じる摩擦力によって樹脂膜4を設けているロータ2が円周方向に移動され、ロータ2及びこれを支持している回転軸3が回転される。回転軸3の回転力は回転軸3に取着された図には表れない歯車を介して外部に伝達される。
【0014】
このとき、ロータ2の圧接面21aはステータ1の櫛歯体12の表面12aには直接圧接されておらず樹脂膜4が介在されているため、ロータ2とステータ1の金属同士が直接接触することがなく回転騒音が抑制され、静粛な回転動作が行われる。また、櫛歯体12とロータ2の両圧接面の間にはPTFEからなる樹脂膜4が存在しており、この樹脂膜4の圧接面4aにおける摩擦係数は金属よりも小さいため、これら圧接面12aと4aの間の摩擦係数は櫛歯体12の圧接面12aとロータ2の圧接面21aが直接接触するよりも低減され、特に超音波モータを始動する際の静摩擦係数を低下し、スムーズな回転始動が可能になる。
【0015】
ところで、超音波モータの回転駆動に伴って発生する熱によりロータ2、ないし超音波モータ全体の温度が上昇すると、これに伴って樹脂膜4の温度も上昇する。樹脂膜4の摩擦係数は前述したように温度の依存性があり、PTFEの場合には図5に示すように温度の上昇に伴って摩擦係数が低下する。そのため、超音波モータの温度の上昇に伴って櫛歯体12とロータ2との間の摩擦係数も樹脂膜4の圧接面4aでの摩擦係数の低下に伴って低下し、両圧接面12aと4aは滑り易い状態になる。そのため、櫛歯体12からロータ2に向けての円周方向の変位の伝達効率が低下し、結果として超音波モータの回転効率が低下してしまうことになる。しかし、実施例1では、超音波モータの温度上昇に伴って圧縮コイルスプリング16の温度が上昇し、形状記憶合金の臨界温度を越えると、圧縮コイルスプリング16の自然コイル長はそれまでのL1からL2に伸長する。一般に圧縮コイルスプリングのバネ係数は長さの変化にかかわらず一定であるので、圧縮コイルスプリング16のバネ特性がリニアであるとした場合には、圧縮コイルスプリング16のバネ力はF倍〔F=(L2−L0)/(L1−L0)〕となり、この実施例の場合にはF=2となる。これにより、圧縮コイルスプリング16によってロータ2に設けた樹脂膜4の圧接面4aと櫛歯体12の圧接面12aとの間の圧接力はほぼ2倍になる。一方、図5に示したように、樹脂膜4は常温からの温度上昇に伴って摩擦係数がほぼ0.3から0.15と、ほぼ1/2に低下するため、櫛歯体12と樹脂膜4との間の摩擦力(摩擦力=圧接力×摩擦係数)はほぼ一定の値に保たれることになる。すなわち、超音波モータの温度上昇に伴って樹脂膜4の摩擦係数が低下しても、櫛歯体12とロータ2との間の圧接力が増大するため、結果として櫛歯体12と樹脂膜4、すなわちロータ2との間の摩擦力はほぼ一定に保たれることになり、結果として超音波モータにおける回転効率をほぼ一定に保ち、回転効率が低下することはない。
【0016】
なお、超音波モータの駆動が停止され、超音波モータの温度が常温にまで低下すると、樹脂膜4の摩擦係数は増加し、代わりに圧縮コイルスプリング16が臨界温度よりも低下して自然コイル長がL2からL1に短縮されてバネ力が低下されるため、この場合にも櫛歯体12と樹脂膜4との間の摩擦力はほぼ一定に保持され、回転効率が低下することはない。
【実施例2】
【0017】
実施例1では本発明における圧接力調整手段を圧縮コイルスプリング16で構成し、当該圧縮コイルスプリング16を形状記憶合金で形成してその自然コイル長を温度により変化させることで櫛歯体12と樹脂膜4との間の圧接力を変化させているが、圧接力調整手段として温度変化に応じて圧縮コイルスプリング16の軸受筒15内における内挿コイル長を変化させて圧接力を変化させる手段で構成してもよい。図6は実施例2の構造例であり、実施例1と同一部分には同一符号を付して説明は省略する。この実施例2では圧接力調整手段として軸受筒15を形状記憶合金で形成し、軸受筒15の図示下側の下端部15aを温度変化によって変形させ、当該軸受筒15の下端部15aと、軸受筒15の上端部に固定している玉軸受17との間に内挿されている圧縮コイルスプリング16の内挿コイル長を変化させるように構成している。ここで、軸受筒15は、臨界温度よりも低温の常温のときには図6の鎖線で示すように軸受筒15の下端部15aが伸長して軸受筒長を長くし、圧縮コイルスプリングの内挿コイル長L11が長くなる形状となる。また、臨界温度以上のときには同図の実線で示すように下端部15aを外側に突出するように湾曲変形して軸受筒長を短くし、圧縮コイルスプリング16の内挿コイル長L12が短くなる形状となるように形成している。ここで、内挿コイル長L11とL12は、各コイル長のときの圧縮コイルスプリング16によって生じるバネ力、すなわち櫛歯体12と樹脂膜4との間の圧接力が2倍に変化するように設計されている。なお、圧縮コイルスプリング16はそれ自体は通常のバネ線材で形成されている。
【0018】
実施例2では、超音波モータが駆動を始める際には、図6の鎖線のように軸受筒15は下端部15aが伸長して圧縮コイルスプリング16の内挿コイル長L11は長い状態にあるので、圧縮コイルスプリング16のバネ力は小さく、当該圧縮コイルスプリング16による櫛歯体12と樹脂膜4との間の圧接力は低い状態にある。このとき、樹脂膜4の摩擦係数は大きいため、低い圧接力でも所定の摩擦力を得て、所定の回転効率が得られる。一方、超音波モータが駆動して温度が上昇し、樹脂膜4の摩擦係数が低下するが、軸受筒15の温度上昇に伴って臨界温度に達した時点で軸受筒15の下端部15aが図6の実線のように上方に短縮するように変形され、内挿されている圧縮コイルスプリング16の内挿コイル長がL12に縮小し、圧縮コイルスプリング16のバネ力が増大し、櫛歯体12と樹脂膜4との間の圧接力が増加する。これにより、温度上昇に伴う樹脂膜4の摩擦係数の低下にかかわらず、圧接力の増加によって摩擦力が増加され、所定の回転効率が保持されることになる。
【実施例3】
【0019】
実施例3は実施例2と同様の趣旨で、温度変化に応じて圧縮コイルスプリング16の軸受筒15内における内挿コイル長を変化させて圧接力を変化させている。図7は実施例3の構造例であり、実施例1,2と同一部分には同一符号を付してある。この実施例3では本発明における圧接力調整手段として、軸受筒15の上端部内に配設している玉軸受17を回転軸3に対して係止しているワッシャ31を形状記憶合金で形成し、このワッシャ31の外径寸法を実施例1,2よりも大径に形成するとともに、外径部31aを温度変化によって軸方向に変形させるように構成している。すなわち、ワッシャ31は臨界温度よりも低温のときには図7の鎖線で示すように外径部31aが軸方向と直交する方向に真直状態となり、玉軸受17は圧縮コイルスプリング16のバネ力によって軸方向の上方位置に位置され、結果として圧縮コイルスプリング16の内挿コイル長L11が長くなる。臨界温度よりも高温のときには図7の実線のように外径部31aを軸方向に沿った方向に曲げ変形し、玉軸受17を圧縮コイルスプリング16のバネ力に抗して軸方向下方に移動させ、圧縮コイルスプリング16の内挿コイル長L12を短くする。これにより、ワッシャ31の外径部31aによって玉軸受17の軸方向の位置を変化させ、圧縮コイルスプリング16を内挿している軸受筒15の実質的な長さを変化させ、圧縮コイルスプリングのバネ力を変化させる。ここで、内挿コイル長L11とL12は、各コイル長のときに圧縮コイルスプリング16のバネ力、すなわち櫛歯体12と樹脂膜4との間の圧接力が2倍に変化するように設計されている。なお、圧縮コイルスプリング16は通常のバネ線材で形成されている。
【0020】
実施例3では、超音波モータが始動する際には、図7の鎖線のようにワッシャ31は外径部31aが水平方向に伸長して玉軸受17は上方に位置されて圧縮コイルスプリング16の内挿コイル長L11は長い状態にあるので、圧縮コイルスプリング16による櫛歯体12と樹脂膜4との間の圧接力は低い状態にある。このとき、樹脂膜4の摩擦係数は大きいため、低い圧接力でも所定の摩擦力を得て、所定の回転効率が得られる。一方、超音波モータが駆動して温度が上昇し、樹脂膜4の摩擦係数が低下するが、図7の実線のようにワッシャ31が臨界温度に達した時点で外径部31aが下方に変形して玉軸受17を下方に移動し、圧縮コイルスプリング16の内挿コイル長がL12に縮小し、圧縮コイルスプリング16のバネ力が増加し、櫛歯体12と樹脂膜4との間の圧接力が増加する。これにより、温度上昇に伴う樹脂膜4の摩擦係数の低下にかかわらず、圧接力の増加によって樹脂膜4において所定の摩擦力が得られ、所定の回転効率が保持されることになる。
【0021】
ここで、実施例1〜3ではそれぞれ圧縮コイルスプリング16、軸受筒15、ワッシャ31を形状記憶合金で形成した例を示したが、実施例2の場合には軸受筒15を、また実施例3の場合にはワッシャ31をそれぞれ温度変化に伴って連続的に変形するバイメタルで構成してもよい。このようにすれば、温度変化に伴ってバイメタルで構成された軸受筒15の下端部31aやワッシャ31の外径部31aが連続的に変形されるため、圧縮コイルスプリング16の内挿コイル長を連続的に変化させることができる。これにより、図5に示したように温度変化に伴って連続的に変化する樹脂膜4の摩擦係数の変化に追従して圧縮コイルスプリング16による樹脂膜4での圧接力を変化させ、全温度変化範囲にわたって回転効率をほぼ一定に保持した超音波モータを実現することも可能である。
【0022】
また、本発明は実施例1,2,3の構成をそれぞれ単独に構成するのに限られるものではなく、実施例1,2,3の構成及びバイメタルの構成を適宜に組み合わせることにより、温度変化に対してさらに有効な回転効率の超音波モータを実現することも可能である。また、圧接力を得るための弾性手段は実施例1〜3の圧縮コイルスプリングに限られるものではなく、板バネ等を用いて構成された超音波モータの場合でも温度変化に追従してバネ力を変化するように構成すればよい。
【0023】
さらに、樹脂膜は実施例のPTFEに限られるものではなく、PFA(四フッ化エチレン・パーフロロアルキルビニルエーテル共重合体)、FEP(四フッ化エチレン・六フッ化プロピレン共重合体)のいずれか、又はこれらの混合物であってもよい。
【0024】
また、本発明は、樹脂膜が実施例1〜3の場合とは逆に、温度が上昇したときに摩擦係数が増加する温度摩擦係数特性を有する樹脂膜を用いた超音波モータへの適用も可能であり、この場合には温度が上昇したときに圧縮コイルスプリングによる圧接力が低減するように構成すればよい。
【図面の簡単な説明】
【0025】
【図1】実施例1の超音波モータの外観斜視図である。
【図2】図1の超音波モータの軸方向の断面図である。
【図3】図1の超音波モータの部分分解斜視図である。
【図4】圧縮コイルスプリングのコイル長を示す図である。
【図5】樹脂膜における摩擦係数の温度異存性を示す図である。
【図6】実施例2の超音波モータの断面図である。
【図7】実施例3の超音波モータの断面図である。
【符号の説明】
【0026】
1 ステータ
2 ロータ
3 回転軸
4 樹脂膜
4a 圧接面(樹脂膜)
11 台座
12 櫛歯体
12a 圧接面(櫛歯体)
13 圧電体
14 フレキシブル基板
15 軸受筒
15a 下端部
16 圧縮コイルスプリング
17 玉軸受
21 周壁部
21a 圧接面(ロータ)
31 ワッシャ
31a 外径部
【特許請求の範囲】
【請求項1】
圧電体及び円周方向に配列した多数の櫛歯を有する櫛歯体を備えるステータと、前記櫛歯体の表面に圧接される圧接面を有する回転可能なロータと、前記ステータとロータを圧接させるための弾性手段とを備え、前記ステータとロータの少なくとも一方の圧接面に温度変化によって摩擦係数が変化する樹脂膜を有する超音波モータであって、温度変化に伴って前記弾性手段の弾性力を変化させ、前記樹脂膜の表面における摩擦力をほぼ一定に保持させる圧接力調整手段を備えることを特徴とする超音波モータ。
【請求項2】
前記弾性手段は前記ステータとロータとの間に介挿された圧縮コイルスプリングであり、前記圧接力調整手段は温度変化によって自然コイル長が変化する形状記憶材料で形成された当該圧縮コイルスプリングで構成されていることを特徴とする請求項1に記載の超音波モータ。
【請求項3】
前記弾性手段は前記ステータとロータとの間に弾性的に介挿された圧縮コイルスプリングであり、前記圧接力調整手段は前記圧縮コイルスプリングの内挿コイル長を温度変化に追従して変化させる構成であることを特徴とする請求項1に記載の超音波モータ。
【請求項4】
前記弾性手段は前記ステータとロータとの間に弾性的に介挿された圧縮コイルスプリングであり、前記圧接力調整手段は前記圧縮コイルスプリングの少なくとも一方の端部を温度変化に追従してコイル長方向に位置変化させる構成であることを特徴とする請求項3に記載の超音波モータ。
【請求項5】
前記弾性手段は前記ステータに設けられて前記ロータを回転可能に支持するための軸受筒内に内挿された圧縮コイルスプリングであり、前記圧接力調整手段は前記軸受筒を温度変化によって当該軸受筒の実質的な筒軸長が変化する形状記憶材料で形成していることを特徴とする請求項4に記載の超音波モータ。
【請求項6】
前記弾性手段は前記ステータに設けられた軸受筒と、前記ロータを回転可能に支持して前記軸受筒内に支持される玉軸受との間に内挿された圧縮コイルスプリングであり、前記圧接力調整手段は前記玉軸受を前記圧縮コイルスプリングの軸方向に移動させる係止部材で構成し、当該係止部材を温度変化によって前記玉軸受を移動させて前記圧縮コイルスプリングの内挿コイル長を変化させる形状記憶材料で形成していることを特徴とする請求項4に記載の超音波モータ。
【請求項7】
前記樹脂膜はPTFE(四フッ化エチレン)で代表されるフッ素樹脂であることを特徴とする請求項1ないし6のいずれかに記載の超音波モータ。
【請求項8】
前記樹脂膜は前記ステータ又はロータの少なくとの一方の圧接面に塗布或いは接着されていることを特徴とする請求項7に記載の超音波モータ。
【請求項1】
圧電体及び円周方向に配列した多数の櫛歯を有する櫛歯体を備えるステータと、前記櫛歯体の表面に圧接される圧接面を有する回転可能なロータと、前記ステータとロータを圧接させるための弾性手段とを備え、前記ステータとロータの少なくとも一方の圧接面に温度変化によって摩擦係数が変化する樹脂膜を有する超音波モータであって、温度変化に伴って前記弾性手段の弾性力を変化させ、前記樹脂膜の表面における摩擦力をほぼ一定に保持させる圧接力調整手段を備えることを特徴とする超音波モータ。
【請求項2】
前記弾性手段は前記ステータとロータとの間に介挿された圧縮コイルスプリングであり、前記圧接力調整手段は温度変化によって自然コイル長が変化する形状記憶材料で形成された当該圧縮コイルスプリングで構成されていることを特徴とする請求項1に記載の超音波モータ。
【請求項3】
前記弾性手段は前記ステータとロータとの間に弾性的に介挿された圧縮コイルスプリングであり、前記圧接力調整手段は前記圧縮コイルスプリングの内挿コイル長を温度変化に追従して変化させる構成であることを特徴とする請求項1に記載の超音波モータ。
【請求項4】
前記弾性手段は前記ステータとロータとの間に弾性的に介挿された圧縮コイルスプリングであり、前記圧接力調整手段は前記圧縮コイルスプリングの少なくとも一方の端部を温度変化に追従してコイル長方向に位置変化させる構成であることを特徴とする請求項3に記載の超音波モータ。
【請求項5】
前記弾性手段は前記ステータに設けられて前記ロータを回転可能に支持するための軸受筒内に内挿された圧縮コイルスプリングであり、前記圧接力調整手段は前記軸受筒を温度変化によって当該軸受筒の実質的な筒軸長が変化する形状記憶材料で形成していることを特徴とする請求項4に記載の超音波モータ。
【請求項6】
前記弾性手段は前記ステータに設けられた軸受筒と、前記ロータを回転可能に支持して前記軸受筒内に支持される玉軸受との間に内挿された圧縮コイルスプリングであり、前記圧接力調整手段は前記玉軸受を前記圧縮コイルスプリングの軸方向に移動させる係止部材で構成し、当該係止部材を温度変化によって前記玉軸受を移動させて前記圧縮コイルスプリングの内挿コイル長を変化させる形状記憶材料で形成していることを特徴とする請求項4に記載の超音波モータ。
【請求項7】
前記樹脂膜はPTFE(四フッ化エチレン)で代表されるフッ素樹脂であることを特徴とする請求項1ないし6のいずれかに記載の超音波モータ。
【請求項8】
前記樹脂膜は前記ステータ又はロータの少なくとの一方の圧接面に塗布或いは接着されていることを特徴とする請求項7に記載の超音波モータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−154410(P2008−154410A)
【公開日】平成20年7月3日(2008.7.3)
【国際特許分類】
【出願番号】特願2006−342092(P2006−342092)
【出願日】平成18年12月20日(2006.12.20)
【出願人】(000000527)ペンタックス株式会社 (1,878)
【Fターム(参考)】
【公開日】平成20年7月3日(2008.7.3)
【国際特許分類】
【出願日】平成18年12月20日(2006.12.20)
【出願人】(000000527)ペンタックス株式会社 (1,878)
【Fターム(参考)】
[ Back to top ]