
路面撮像装置及び路面標示計測装置
【課題】路面標示を撮像するための構成が容易であり、かつ高精度に路面標示を解析できる装置を提供することを目的とする。
【解決手段】車両に搭載され、地図の属性情報として使用される路面標示を計測するための路面画像を撮像する路面撮像装置であって、全周画像を取得可能な光学機器を備える撮像部を有する、ことを特徴とする路面撮像装置である。
【解決手段】車両に搭載され、地図の属性情報として使用される路面標示を計測するための路面画像を撮像する路面撮像装置であって、全周画像を取得可能な光学機器を備える撮像部を有する、ことを特徴とする路面撮像装置である。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、道路上に標示された車線中央線、車線境界線、及び車線外側線等の路面標示を撮像し、撮像された画像をもとに路面標示を計測する装置に関する。
【背景技術】
【0002】
車線中央線、車線境界線及び車線外側線等の路面標示の画像を撮像し、路面標示の座標を収集する手段として、ステレオ計測が用いられている。ステレオ計測では、車両に複数台のカメラを搭載し、同時に複数台のカメラで路面の状況を撮像し、複数枚の画像に写し出された対象物(車線中央線等)の視差から位置を計測する。計測で得られた位置に座標情報を付加することにより、路面標示の座標を収集することが可能となる(非特許文献1参照)。
【非特許文献1】第3回ITSシンポジウム2004 p41−p46
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、上記従来のステレオ計測においては、高精度で路面標示の位置を解析するために、厳密な撮像装置(ステレオカメラ)の幾何学配置や調整を必要としていた。また、路面標示の位置を自動的に特定するには複雑な解析方法が必要であった。
また、ステレオ計測においては、一対のカメラの視差を利用するため撮像対象とカメラとの間に所定の距離が必要となる。車両直近の路面標示を撮像する場合には、当該路面標示とカメラとの間に十分な距離を確保できないため、撮像範囲が狭くなる。換言すれば、車両直近の路面を広く撮像するには、ステレオカメラのセットを複数準備しなけらばならない。なお、車両直近の路面を撮像するには次の利点がある。即ち、路面標示とカメラとの間に遮へい物(他の車両等)が入り込み難くなるので、路面標示を確実に撮像できる。車両と路面標示との距離がより正確に特定される。
そこで、本発明は、路面標示を撮像するための構成が容易であり、かつ高精度に路面標示を解析できる装置を提供することを目的とする。
【課題を解決するための手段】
【0004】
本発明は上記目的を達成すべくなされたものである。すなわち、
車両に搭載され、地図の属性情報として使用される路面標示を計測するための路面画像を撮像する路面撮像装置であって、
全周画像を取得可能な光学機器を備える撮像部を有する、
ことを特徴とする路面撮像装置である。
【発明の効果】
【0005】
上記構成によれば、撮像部に備えられる光学機器は全周画像を超広角で取得することが可能であるため、一つの光学機器で車両直近の路面を撮像することができる。また、車両に隣接する車線の路面画像の撮像もできる。すなわち、ステレオ計測と比べて、簡単かつ安価な構成でありながら、遮へい物の入り込み難い車両直近の撮像ができ、かつ広範囲な路面画像を取得することができる。
【0006】
また、撮像された路面画像に路面標示が写し出されている場合には、その路面標示を計測し、それに座標情報を関連付けた地図データを作成し、カーナビゲーションなどに搭載することにより安全警告などに利用することができる。
【発明を実施するための最良の形態】
【0007】
以下、この発明の各要素について説明する。
(撮像部)
撮像部は車両に搭載され、走行中の車線及び隣接する車線を含む路面画像を撮像する。
撮像部は光学機器と光学機器で得られた画像を撮像するためのカメラを備える。
光学機器は全周画像を取得するために使用され、例えば、魚眼レンズまたは凸面鏡を用いることができる。魚眼レンズの場合は、視野角180度の広範囲な画像を取得することができる。従って、走行する自車に隣接する車線の画像も取得することが可能となる。
撮像部に使用されるカメラは特に限定されず、例えば、デジタルカメラ、ビデオカメラが用いられる。
【0008】
撮像部は車両の頂部(例えば、車体の屋根部など)に取り付けられることが好ましい。撮影部の取り付け位置をできるだけ高くすることで、撮像される範囲(光軸方向に対して横方向の路面範囲)が広くなるため、隣接する車線の撮像も可能となる。撮像部の取り付け方法は、特に限定されないが、例えば、車体の屋根部に撮像部を取り付けるための取り付け台を組み立てて、そこに撮像部を取り付けてもよい。
【0009】
撮像部は車両の前方に向けて設置されることが好ましい。前方に取り付けることにより、自車をコントロールすることで、他の車両との車間距離を保ち、直前の路面を確実に撮像することができる。
【0010】
光学機器の光軸方向は車両の進行方向と略平行に設置されることが好ましい。例えば、光学機器の光軸方向を車両の進行方向と略平行にしたときは、車線境界線は直線で撮像される(図3参照)。すなわち、本来直線状の車線境界線を画像の上でも直線として撮像されるので、路面画像から路面標示を計測するために複雑な計算を必要としない。一方、光学機器の光軸方向を真下に向けたときは、本来直線である車線境界線が画像の上では曲線状に撮像されるため(図10参照)、路面標示を計測するためには複雑な計算を必要とする。従って、路面標示の計測を容易にできる点で、光学機器の光軸方向は車両の進行方向と略平行に設置されることが好ましい。
【0011】
光学機器には、レンズの上半分に太陽光などの余分や光が入り込むことを防止するために、遮光手段が備えられることが好ましい。遮光手段は特に限定されないが、例えば、レンズの上半分を遮光用のフードで覆ったり、レンズの上半分に遮光用のフィルターを貼り付けてもよい。これにより、輝度の強い太陽光が撮像されることなく、データ解析に利用可能な画像を安定して撮像することができる。
【0012】
(路面標示抽出部)
路面標示抽出部は、撮像部で撮像された画像から所定のルールに従い路面標示に対応する特定点を抽出する。所定のルールは任意に定めることが可能である。例えば、路面画像の中心点に対して同心円を設定し、同心円上の明度が所定のしきい値以上であるときに、路面標示の一部であると判断し、これを特定点として抽出する。
データ処理の軽減の観点から同心円の数を少なくした場合、停止線のような横軸に平行となる路面標示は、同心円上の一部にかからないこともある。そこで、画面の中心点から下方向に直線を設定し、同心円上にかからないときでも、直線上に路面標示の一部がかかるようにして特定点を抽出できる構成とする。さらに、横断歩道のような横軸方向に長く、複雑な形状をした路面標示を検出するため、中心点から下方向及び左右下方向に複数の放射線を設定し、特定点を抽出できる構成としてもよい。
なお、同心円上又は放射線上の走査範囲は、画像上の下半分の画像について設定される。これは、画像における下半分が路面となるため、走査する範囲も下半分の画像とすることでデータ処理の軽減を図ったためである。
【0013】
(路面標示認識部)
路面標示認識部は、路面標示抽出部で認識された特定点に基づいて路面標示のパターン(例えば、車線中央線のような連続線や一時停止線のような横線、横断歩道のような縦線と横線で表される形状の線、横断歩道または自転車横断帯ありを示す菱形マーク等)を認識する。
路面標示の認識方法は特に限定されないが、車線境界線のような連続した直線であれば、抽出される特定点は一定の角度で連続的に抽出される(図5参照)。この場合は、予め用意されている標準パターン(例えば、直線を特定点の配置の情報として保存したもの)と比較され、一致又は略一致するときは、抽出された特定点は直線と認識される。
一方、菱形マークであれば、抽出される特定点は一定の角度で連続的に抽出されることはない。この場合は、少なくとも直線とは認識されず、他の路面表示パターンと判断される。同様に、抽出された特定点と予め用意されている標準パターン(例えば、菱形マークを特定点の配置の情報として保存したもの)とを比較し、一致又は略一致するときは、抽出された特定点はその標準パターン(例えば、菱形マーク)と認識される。
認識されたパターンと予め用意された標準パターンとが一致しないときは、オペレータが特定点の配置から類似するパターンをマニュアルで選び出してもよい。また、路面標示の存在を示唆する座標情報のみを保存するようにしてもよい。
【0014】
路面標示を認識するとき、同じ路面標示を複数回認識することがある。
例えば、進行方向に対して撮像部を搭載し、菱形マークを撮像するとき、路面画像では、菱形マークは初め画面の中心部に位置し、車両が進行するに従って、菱形マークは画面の下部に移動する。ここで、画面の中心部に位置する菱形マークと画面の下部に位置する菱形マークとを比較すれば、画面の下部に位置する菱形マークの方が輪郭が鮮明であり、路面標示を認識しやすい。そこで、同じ菱形マークについて複数枚の画像が撮像された場合には、最下部に位置する菱形マークを採用して路面標示を認識することが好ましい。
【実施例1】
【0015】
以下、この発明の実施例について説明する。
図1は本発明の実施例である路面撮像装置10と路面標示計測装置20との概略図である。
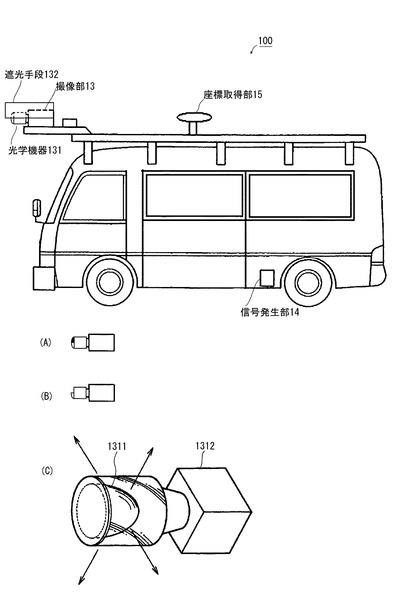
図2は路面撮像装置10を搭載した測定用車両100を示す図である。測定用車両100は撮像部13と、信号発生部14と、座標取得部15とを備える。
図3は遮光手段を備えた撮像部13で撮像された路面画像の一例である。
図4は撮像された画像をもとに路面標示抽出部23が特定点を抽出する手段を示す図である。
図5は図4で得られた特定点を三次元プロットにした図である。
【0016】
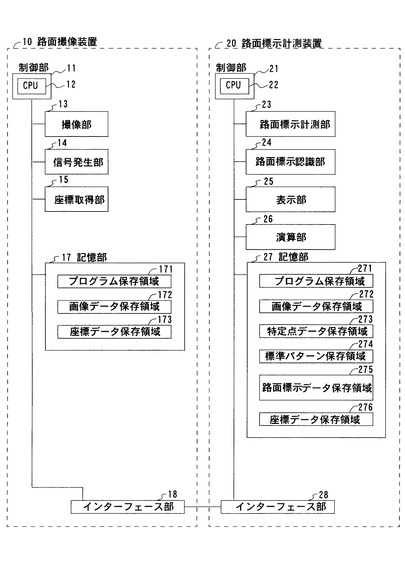
図1において、路面撮像装置10は、制御部11と、撮像部13と、信号発生部14と、座標取得部15と、記憶部17と、で構成される。
路面標示計測装置20は、制御部21と、路面標示抽出部23と、路面標示認識部24と、表示部25と、演算部26と、記憶部27と、で概略構成される。
路面標示計測装置20はインターフェース部28が備えられ、路面撮像装置10に備えられたインターフェース部18からデータの取得が可能である。
【0017】
制御部11は、CPU12を備える。路面撮像装置10に備えられる各要素はバスラインを介してこのCPU12に接続され、その制御を受ける。CPU12を動作させるためのプログラムは記憶部17に保存されており、CPU12は当該プログラムを読み出して所定の動作を行うこととなる。
【0018】
撮像部13は、道路表面に標示された車線中央線、車線境界線及び車線外側線等の路面標示の映像を撮像する装置であり、車両の前方を撮像するように車両に搭載される。撮像部13は、デジタルカメラ、ビデオカメラ等の市販の撮像装置が利用され、光学機器131として全周画像の撮像ができる魚眼レンズや凸面鏡が使用される。
【0019】
撮像部13は車両100の頂部(車体の屋根部)に取り付けられる(図2参照)。撮影部13の取り付け位置をできるだけ高くすることで、撮像される範囲が広くなるため、隣接する車線の撮像も可能となる。撮像部13の取り付け方法は、車体100の屋根部に撮像部13を取り付けるための取り付け台を組み立てて、そこに撮像部13を取り付ける。
【0020】
また、撮像部13は車両100の前方に向けて設置される(図2参照)。前方に取り付けることにより、自車をコントロールすることで、他の車両との車間距離を保ち、直前の路面を確実に撮像することができる。
【0021】
光学機器131の光軸方向は車両100の進行方向と略平行に設置される。車線境界線を撮像する場合、光学機器131の光軸方向を車両100の進行方向と略平行にしたときは、車線境界線は直線状で撮像される(図3参照)。すなわち、路面画像から路面標示を計測するために複雑な計算を必要としないため、路面標示の計測が容易にできる。
【0022】
光学機器131には、レンズの上半分に太陽光などの余分や光が入り込むことを防止するために、遮光手段132が備えられる。遮光手段132としてフードが用いられ、光学機器131の上部及びレンズの上半分を覆うように設置される(図2参照)。遮光手段132を施すことで、輝度の強い太陽光が撮像されることなく、データ解析に利用可能な画像を安定して撮像することができる。
これ以外の撮像手段として、図2に示すように、レンズの表面の上半分を黒色に塗りつぶしたり(A)、レンズの上半分をカット(B)してもよい。また、魚眼レンズの代わりに、矢印方向の撮像が可能な凸面鏡1311をカメラ1312に取り付けて撮像してもよい(C)。
【0023】
信号発生部14は、車両の移動距離を測定し、一定距離(例えば、2m)ごとにパルス信号を発生する。発生したパルス信号は撮像部13に送られ、撮像部13はパルス信号を受け取ったタイミングで路面を撮像する。
座標取得部15はGPS受信機等により構成され、車両の座標情報を取得する。取得された座標情報は路面画像と関連付けられて記憶部17に保存される。
記憶部17は、HDDなどの記憶媒体で構成される。この記憶部17は、CPU12を制御するためのプログラムを保存するプログラム保存領域171と、撮像部13で撮像された画像データを保存する画像データ保存領域172と、座標取得部15で取得される車両の座標データ等を保存する座標データ保存領域173とで概略構成される。
【0024】
制御部21は、CPU22を備える。路面標示計測装置20に備えられる各要素はバスラインを介してこのCPU22に接続され、その制御を受ける。CPU22を動作させるためのプログラムは記憶部27に保存されており、CPU22は当該プログラムを読み出して所定の動作を行うこととなる。
【0025】
路面標示抽出部23は、撮像部13で撮像された画像をもとに路面標示の特定点を抽出する。図3は撮像部13で撮像された画像の一例である。図4は図3の画像から特定点を抽出する場合の抽出手段を示す図である。中心点から所定の間隔のもとに同心円を設定し、同心円上の明度について、所定のしきい値以上のものを検出する。
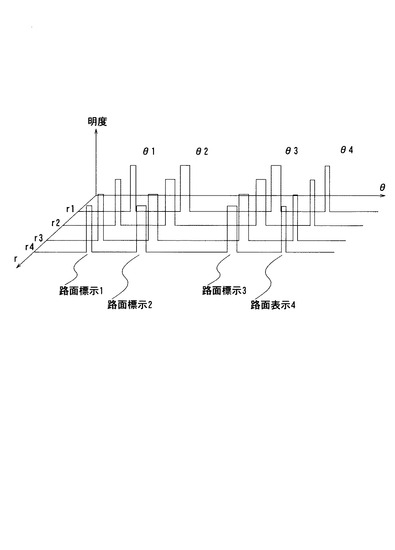
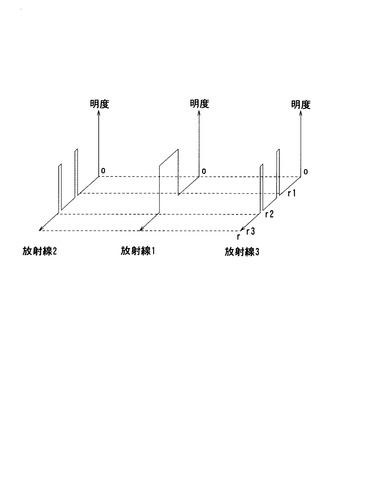
図5は検出された明度と、距離と、角度の関係を示す図である。路面標示が白色であれば、明度の強度が強く、図のような結果が得られる。路面標示以外の部分(例えば、アスファルトなど)は、得られる明度が所定のしきい値よりも低いため、特定点の抽出の対象にはならない。
なお、路面標示抽出部23は白色又は黄色の区別も可能であり、明度の強度により判別する。判別された色は、路面標示認識部で認識される路面標示の認識時の判断材料として利用される。
路面標示認識部24は、路面標示抽出部23で抽出された特定点の配置に基づいて路面標示のパターンを認識する。例えば、図5に示すように角度θ1について、特定点が所定の間隔で抽出されているときは、記憶部27の標準パターン保存領域274に保存されている標準パターンの中から、ある角度について所定の間隔で特定点が抽出されるときの標準パターン(直線)と一致するかを判断し、一致するようであれば、θ1には直線があると認識されることとなる。
【0026】
表示部25は、ディスプレイ等で構成され、撮像部13で撮像された画像等を表示する。
演算部26は、撮像部13で撮像された画像から特定点を抽出するときに必要となる演算処理を実行する。
記憶部27は、HDDなどの記憶媒体で構成される。この記憶部27は、CPU22を制御するためのプログラムを保存するプログラム保存領域271と、撮像部13で撮像された画像データを保存する画像データ保存領域272と、路面標示抽出部23で抽出される特定点に関するデータを保存する特定点データ保存領域273と、特定点の配置から路面標示を認識するときに、比較材料として使用される標準パターンを保存する標準パターン保存領域274と、特定点に関するデータから認識された路面標示のデータを保存する路面標示データ保存領域275と、座標取得部15で取得される車両の座標データを保存する座標データ保存領域276とで概略構成される。
【0027】
以下に、路面撮像装置10及び路面標示計測装置20の動作を説明する。
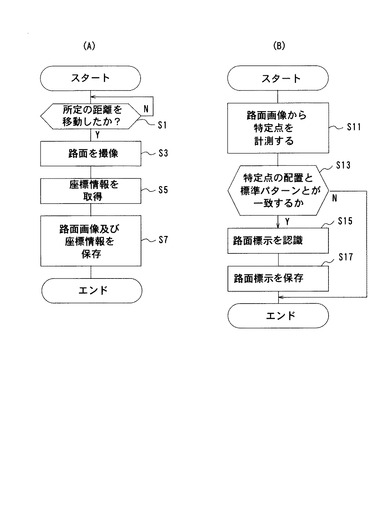
図6は路面撮像装置10の動作(図6(A))及び路面標示計測装置20の動作(図6(B))を示すフローチャートである。
車両が所定の距離を移動することでパルス信号が発生し(ステップ1:Y)、撮像部13が路面を撮像する(ステップ3)。また、座標取得部15がGPS衛星から座標情報を取得する(ステップ5)。撮像された路面画像(画像データ)と取得した座標情報(座標データ)は記憶部17にそれぞれが関連づけられて保存される(ステップ7)。
【0028】
路面標示計測装置20は、インターフェース部28を介して画像データ及び座標データを取得し、記憶部27に保存する。
路面標示抽出部23は路面画像から一定以上の明度を有する特定点を抽出する(ステップ11)。続いて、路面標示認識部24が抽出された特定点の配置と標準パターンとが一致するかを判断し、一致するときは(ステップ13:Y)、標準パターンを路面標示として認識する(ステップ15)。認識された路面標示は路面標示データ保存領域275に保存される(ステップ17)。一方、特定点の配置と標準パターンとが一致しないときは(ステップ13:N)、オペレータの判断により、標準パターンに類似するものを選び出してもよい。
【0029】
以上のように、撮像部に備えられる光学機器は全周画像を取得することが可能であるため、車両に隣接する車線の路面画像の撮像ができる。撮像された路面画像から路面標示を計測し、それに座標情報を付加することにより、カーナビゲーション用の道路データに路面標示を関連付けることが可能となる。
【実施例2】
【0030】
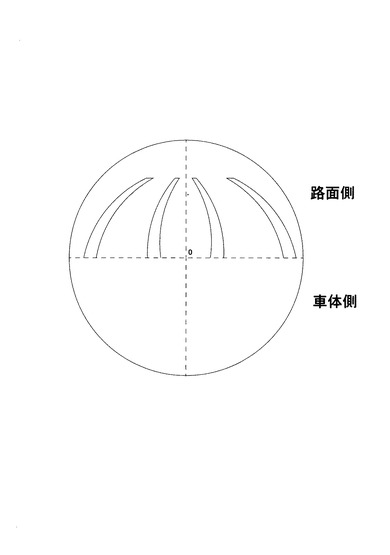
図7は本発明の他の実施例であり、撮像された画像をもとに路面標示抽出部23が特定点を抽出する手段を示す図である。図7において、中心点から所定の間隔のもとに同心円を設定し、さらに中心点から下方向及び左右下方向に放射線を設定する。これら同心円上及び放射線上において、所定のしきい値以上の明度を有する点を解析することで特定点の抽出を行う。
図8は図7の放射線上の明度を解析することで得られた特定点の二次元プロット図である。
【0031】
以下に、本実施例の動作を説明する。
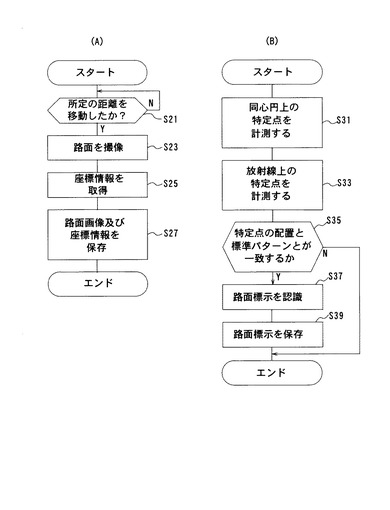
図9は路面撮像装置10の動作(図9(A))及び路面標示計測装置20の動作(図9(B))を示すフローチャートである。
車両が所定の距離を移動することでパルス信号が発生し(ステップ21:Y)、撮像部13が路面を撮像する(ステップ23)。また、座標取得部15がGPS衛星から座標情報を取得する(ステップ25)。撮像された路面画像と取得した座標情報は記憶部17にそれぞれが関連づけられて保存される(ステップ27)。
【0032】
路面標示計測装置20は、インターフェース部28を介して画像データ及び座標データを取得し、それらのデータを記憶部27に保存する。
次に、路面標示抽出部23は路面画像の同心円上から一定以上の明度を有する特定点を抽出する(ステップ31)。次に、放射線上から一定以上の明度を有する特定点を抽出する(ステップ33)。続いて、路面標示認識部24が抽出された特定点の配置と標準パターンとが一致するかを判断し、一致するときは(ステップ35:Y)、標準パターンを路面標示として認識する(ステップ37)。認識された路面標示は路面標示データ保存領域275に保存される(ステップ39)。一方、特定点の配置と標準パターンとが一致しないときは(ステップ35:N)、オペレータの判断により、標準パターンに類似するものを選び出してもよい。
【0033】
以上のように、撮像された画像の中心点から下方向及び左右下方向に放射線を設定することで、隣接する同心円上に路面標示がかからない場合であっても、特定点の検出をすることが可能となる。
【0034】
この発明は、上記発明の実施の形態及び実施例の説明に何ら限定されるものではない。特許請求の範囲の記載を逸脱せず、当業者が容易に想到できる範囲で種々の変形態様もこの発明に含まれる。
【図面の簡単な説明】
【0035】
【図1】図1は実施例1の路面標示計測装置の概略図である。
【図2】図2は路面撮像装置を搭載した測定用車両の一例を示す図である。(A)及び(B)は遮光手段の一例である。(C)は凸面鏡を備えた撮像部の斜視図である。
【図3】図3は撮像部で撮像された路面画像の一例である。
【図4】図4は路面標示抽出部が撮像された画像をもとに特定点を抽出する手段を示す図である。
【図5】図5は図4で得られた特定点を三次元プロットにした図である。
【図6】図6は路面撮像装置10の動作(A)及び路面標示計測装置20の動作(B)を示すフローチャートである。
【図7】図7は実施例2の路面標示計測装置を用いて、撮像された画像をもとに特定点を計測する手段を示す図である。
【図8】図8は図7で得られた特定点を二次元プロットした図である。
【図9】図9は路面撮像装置10の動作(A)及び路面標示計測装置20の動作(B)を示すフローチャートである。
【図10】図10は撮像部の光軸方向を車両真下に向けたときに撮像される路面画像のイメージ図である。
【符号の説明】
【0036】
10 路面撮像装置、13 撮像部、15 座標取得部、20 路面標示計測装置、23 路面標示抽出部、24 路面標示認識部
【技術分野】
【0001】
この発明は、道路上に標示された車線中央線、車線境界線、及び車線外側線等の路面標示を撮像し、撮像された画像をもとに路面標示を計測する装置に関する。
【背景技術】
【0002】
車線中央線、車線境界線及び車線外側線等の路面標示の画像を撮像し、路面標示の座標を収集する手段として、ステレオ計測が用いられている。ステレオ計測では、車両に複数台のカメラを搭載し、同時に複数台のカメラで路面の状況を撮像し、複数枚の画像に写し出された対象物(車線中央線等)の視差から位置を計測する。計測で得られた位置に座標情報を付加することにより、路面標示の座標を収集することが可能となる(非特許文献1参照)。
【非特許文献1】第3回ITSシンポジウム2004 p41−p46
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、上記従来のステレオ計測においては、高精度で路面標示の位置を解析するために、厳密な撮像装置(ステレオカメラ)の幾何学配置や調整を必要としていた。また、路面標示の位置を自動的に特定するには複雑な解析方法が必要であった。
また、ステレオ計測においては、一対のカメラの視差を利用するため撮像対象とカメラとの間に所定の距離が必要となる。車両直近の路面標示を撮像する場合には、当該路面標示とカメラとの間に十分な距離を確保できないため、撮像範囲が狭くなる。換言すれば、車両直近の路面を広く撮像するには、ステレオカメラのセットを複数準備しなけらばならない。なお、車両直近の路面を撮像するには次の利点がある。即ち、路面標示とカメラとの間に遮へい物(他の車両等)が入り込み難くなるので、路面標示を確実に撮像できる。車両と路面標示との距離がより正確に特定される。
そこで、本発明は、路面標示を撮像するための構成が容易であり、かつ高精度に路面標示を解析できる装置を提供することを目的とする。
【課題を解決するための手段】
【0004】
本発明は上記目的を達成すべくなされたものである。すなわち、
車両に搭載され、地図の属性情報として使用される路面標示を計測するための路面画像を撮像する路面撮像装置であって、
全周画像を取得可能な光学機器を備える撮像部を有する、
ことを特徴とする路面撮像装置である。
【発明の効果】
【0005】
上記構成によれば、撮像部に備えられる光学機器は全周画像を超広角で取得することが可能であるため、一つの光学機器で車両直近の路面を撮像することができる。また、車両に隣接する車線の路面画像の撮像もできる。すなわち、ステレオ計測と比べて、簡単かつ安価な構成でありながら、遮へい物の入り込み難い車両直近の撮像ができ、かつ広範囲な路面画像を取得することができる。
【0006】
また、撮像された路面画像に路面標示が写し出されている場合には、その路面標示を計測し、それに座標情報を関連付けた地図データを作成し、カーナビゲーションなどに搭載することにより安全警告などに利用することができる。
【発明を実施するための最良の形態】
【0007】
以下、この発明の各要素について説明する。
(撮像部)
撮像部は車両に搭載され、走行中の車線及び隣接する車線を含む路面画像を撮像する。
撮像部は光学機器と光学機器で得られた画像を撮像するためのカメラを備える。
光学機器は全周画像を取得するために使用され、例えば、魚眼レンズまたは凸面鏡を用いることができる。魚眼レンズの場合は、視野角180度の広範囲な画像を取得することができる。従って、走行する自車に隣接する車線の画像も取得することが可能となる。
撮像部に使用されるカメラは特に限定されず、例えば、デジタルカメラ、ビデオカメラが用いられる。
【0008】
撮像部は車両の頂部(例えば、車体の屋根部など)に取り付けられることが好ましい。撮影部の取り付け位置をできるだけ高くすることで、撮像される範囲(光軸方向に対して横方向の路面範囲)が広くなるため、隣接する車線の撮像も可能となる。撮像部の取り付け方法は、特に限定されないが、例えば、車体の屋根部に撮像部を取り付けるための取り付け台を組み立てて、そこに撮像部を取り付けてもよい。
【0009】
撮像部は車両の前方に向けて設置されることが好ましい。前方に取り付けることにより、自車をコントロールすることで、他の車両との車間距離を保ち、直前の路面を確実に撮像することができる。
【0010】
光学機器の光軸方向は車両の進行方向と略平行に設置されることが好ましい。例えば、光学機器の光軸方向を車両の進行方向と略平行にしたときは、車線境界線は直線で撮像される(図3参照)。すなわち、本来直線状の車線境界線を画像の上でも直線として撮像されるので、路面画像から路面標示を計測するために複雑な計算を必要としない。一方、光学機器の光軸方向を真下に向けたときは、本来直線である車線境界線が画像の上では曲線状に撮像されるため(図10参照)、路面標示を計測するためには複雑な計算を必要とする。従って、路面標示の計測を容易にできる点で、光学機器の光軸方向は車両の進行方向と略平行に設置されることが好ましい。
【0011】
光学機器には、レンズの上半分に太陽光などの余分や光が入り込むことを防止するために、遮光手段が備えられることが好ましい。遮光手段は特に限定されないが、例えば、レンズの上半分を遮光用のフードで覆ったり、レンズの上半分に遮光用のフィルターを貼り付けてもよい。これにより、輝度の強い太陽光が撮像されることなく、データ解析に利用可能な画像を安定して撮像することができる。
【0012】
(路面標示抽出部)
路面標示抽出部は、撮像部で撮像された画像から所定のルールに従い路面標示に対応する特定点を抽出する。所定のルールは任意に定めることが可能である。例えば、路面画像の中心点に対して同心円を設定し、同心円上の明度が所定のしきい値以上であるときに、路面標示の一部であると判断し、これを特定点として抽出する。
データ処理の軽減の観点から同心円の数を少なくした場合、停止線のような横軸に平行となる路面標示は、同心円上の一部にかからないこともある。そこで、画面の中心点から下方向に直線を設定し、同心円上にかからないときでも、直線上に路面標示の一部がかかるようにして特定点を抽出できる構成とする。さらに、横断歩道のような横軸方向に長く、複雑な形状をした路面標示を検出するため、中心点から下方向及び左右下方向に複数の放射線を設定し、特定点を抽出できる構成としてもよい。
なお、同心円上又は放射線上の走査範囲は、画像上の下半分の画像について設定される。これは、画像における下半分が路面となるため、走査する範囲も下半分の画像とすることでデータ処理の軽減を図ったためである。
【0013】
(路面標示認識部)
路面標示認識部は、路面標示抽出部で認識された特定点に基づいて路面標示のパターン(例えば、車線中央線のような連続線や一時停止線のような横線、横断歩道のような縦線と横線で表される形状の線、横断歩道または自転車横断帯ありを示す菱形マーク等)を認識する。
路面標示の認識方法は特に限定されないが、車線境界線のような連続した直線であれば、抽出される特定点は一定の角度で連続的に抽出される(図5参照)。この場合は、予め用意されている標準パターン(例えば、直線を特定点の配置の情報として保存したもの)と比較され、一致又は略一致するときは、抽出された特定点は直線と認識される。
一方、菱形マークであれば、抽出される特定点は一定の角度で連続的に抽出されることはない。この場合は、少なくとも直線とは認識されず、他の路面表示パターンと判断される。同様に、抽出された特定点と予め用意されている標準パターン(例えば、菱形マークを特定点の配置の情報として保存したもの)とを比較し、一致又は略一致するときは、抽出された特定点はその標準パターン(例えば、菱形マーク)と認識される。
認識されたパターンと予め用意された標準パターンとが一致しないときは、オペレータが特定点の配置から類似するパターンをマニュアルで選び出してもよい。また、路面標示の存在を示唆する座標情報のみを保存するようにしてもよい。
【0014】
路面標示を認識するとき、同じ路面標示を複数回認識することがある。
例えば、進行方向に対して撮像部を搭載し、菱形マークを撮像するとき、路面画像では、菱形マークは初め画面の中心部に位置し、車両が進行するに従って、菱形マークは画面の下部に移動する。ここで、画面の中心部に位置する菱形マークと画面の下部に位置する菱形マークとを比較すれば、画面の下部に位置する菱形マークの方が輪郭が鮮明であり、路面標示を認識しやすい。そこで、同じ菱形マークについて複数枚の画像が撮像された場合には、最下部に位置する菱形マークを採用して路面標示を認識することが好ましい。
【実施例1】
【0015】
以下、この発明の実施例について説明する。
図1は本発明の実施例である路面撮像装置10と路面標示計測装置20との概略図である。
図2は路面撮像装置10を搭載した測定用車両100を示す図である。測定用車両100は撮像部13と、信号発生部14と、座標取得部15とを備える。
図3は遮光手段を備えた撮像部13で撮像された路面画像の一例である。
図4は撮像された画像をもとに路面標示抽出部23が特定点を抽出する手段を示す図である。
図5は図4で得られた特定点を三次元プロットにした図である。
【0016】
図1において、路面撮像装置10は、制御部11と、撮像部13と、信号発生部14と、座標取得部15と、記憶部17と、で構成される。
路面標示計測装置20は、制御部21と、路面標示抽出部23と、路面標示認識部24と、表示部25と、演算部26と、記憶部27と、で概略構成される。
路面標示計測装置20はインターフェース部28が備えられ、路面撮像装置10に備えられたインターフェース部18からデータの取得が可能である。
【0017】
制御部11は、CPU12を備える。路面撮像装置10に備えられる各要素はバスラインを介してこのCPU12に接続され、その制御を受ける。CPU12を動作させるためのプログラムは記憶部17に保存されており、CPU12は当該プログラムを読み出して所定の動作を行うこととなる。
【0018】
撮像部13は、道路表面に標示された車線中央線、車線境界線及び車線外側線等の路面標示の映像を撮像する装置であり、車両の前方を撮像するように車両に搭載される。撮像部13は、デジタルカメラ、ビデオカメラ等の市販の撮像装置が利用され、光学機器131として全周画像の撮像ができる魚眼レンズや凸面鏡が使用される。
【0019】
撮像部13は車両100の頂部(車体の屋根部)に取り付けられる(図2参照)。撮影部13の取り付け位置をできるだけ高くすることで、撮像される範囲が広くなるため、隣接する車線の撮像も可能となる。撮像部13の取り付け方法は、車体100の屋根部に撮像部13を取り付けるための取り付け台を組み立てて、そこに撮像部13を取り付ける。
【0020】
また、撮像部13は車両100の前方に向けて設置される(図2参照)。前方に取り付けることにより、自車をコントロールすることで、他の車両との車間距離を保ち、直前の路面を確実に撮像することができる。
【0021】
光学機器131の光軸方向は車両100の進行方向と略平行に設置される。車線境界線を撮像する場合、光学機器131の光軸方向を車両100の進行方向と略平行にしたときは、車線境界線は直線状で撮像される(図3参照)。すなわち、路面画像から路面標示を計測するために複雑な計算を必要としないため、路面標示の計測が容易にできる。
【0022】
光学機器131には、レンズの上半分に太陽光などの余分や光が入り込むことを防止するために、遮光手段132が備えられる。遮光手段132としてフードが用いられ、光学機器131の上部及びレンズの上半分を覆うように設置される(図2参照)。遮光手段132を施すことで、輝度の強い太陽光が撮像されることなく、データ解析に利用可能な画像を安定して撮像することができる。
これ以外の撮像手段として、図2に示すように、レンズの表面の上半分を黒色に塗りつぶしたり(A)、レンズの上半分をカット(B)してもよい。また、魚眼レンズの代わりに、矢印方向の撮像が可能な凸面鏡1311をカメラ1312に取り付けて撮像してもよい(C)。
【0023】
信号発生部14は、車両の移動距離を測定し、一定距離(例えば、2m)ごとにパルス信号を発生する。発生したパルス信号は撮像部13に送られ、撮像部13はパルス信号を受け取ったタイミングで路面を撮像する。
座標取得部15はGPS受信機等により構成され、車両の座標情報を取得する。取得された座標情報は路面画像と関連付けられて記憶部17に保存される。
記憶部17は、HDDなどの記憶媒体で構成される。この記憶部17は、CPU12を制御するためのプログラムを保存するプログラム保存領域171と、撮像部13で撮像された画像データを保存する画像データ保存領域172と、座標取得部15で取得される車両の座標データ等を保存する座標データ保存領域173とで概略構成される。
【0024】
制御部21は、CPU22を備える。路面標示計測装置20に備えられる各要素はバスラインを介してこのCPU22に接続され、その制御を受ける。CPU22を動作させるためのプログラムは記憶部27に保存されており、CPU22は当該プログラムを読み出して所定の動作を行うこととなる。
【0025】
路面標示抽出部23は、撮像部13で撮像された画像をもとに路面標示の特定点を抽出する。図3は撮像部13で撮像された画像の一例である。図4は図3の画像から特定点を抽出する場合の抽出手段を示す図である。中心点から所定の間隔のもとに同心円を設定し、同心円上の明度について、所定のしきい値以上のものを検出する。
図5は検出された明度と、距離と、角度の関係を示す図である。路面標示が白色であれば、明度の強度が強く、図のような結果が得られる。路面標示以外の部分(例えば、アスファルトなど)は、得られる明度が所定のしきい値よりも低いため、特定点の抽出の対象にはならない。
なお、路面標示抽出部23は白色又は黄色の区別も可能であり、明度の強度により判別する。判別された色は、路面標示認識部で認識される路面標示の認識時の判断材料として利用される。
路面標示認識部24は、路面標示抽出部23で抽出された特定点の配置に基づいて路面標示のパターンを認識する。例えば、図5に示すように角度θ1について、特定点が所定の間隔で抽出されているときは、記憶部27の標準パターン保存領域274に保存されている標準パターンの中から、ある角度について所定の間隔で特定点が抽出されるときの標準パターン(直線)と一致するかを判断し、一致するようであれば、θ1には直線があると認識されることとなる。
【0026】
表示部25は、ディスプレイ等で構成され、撮像部13で撮像された画像等を表示する。
演算部26は、撮像部13で撮像された画像から特定点を抽出するときに必要となる演算処理を実行する。
記憶部27は、HDDなどの記憶媒体で構成される。この記憶部27は、CPU22を制御するためのプログラムを保存するプログラム保存領域271と、撮像部13で撮像された画像データを保存する画像データ保存領域272と、路面標示抽出部23で抽出される特定点に関するデータを保存する特定点データ保存領域273と、特定点の配置から路面標示を認識するときに、比較材料として使用される標準パターンを保存する標準パターン保存領域274と、特定点に関するデータから認識された路面標示のデータを保存する路面標示データ保存領域275と、座標取得部15で取得される車両の座標データを保存する座標データ保存領域276とで概略構成される。
【0027】
以下に、路面撮像装置10及び路面標示計測装置20の動作を説明する。
図6は路面撮像装置10の動作(図6(A))及び路面標示計測装置20の動作(図6(B))を示すフローチャートである。
車両が所定の距離を移動することでパルス信号が発生し(ステップ1:Y)、撮像部13が路面を撮像する(ステップ3)。また、座標取得部15がGPS衛星から座標情報を取得する(ステップ5)。撮像された路面画像(画像データ)と取得した座標情報(座標データ)は記憶部17にそれぞれが関連づけられて保存される(ステップ7)。
【0028】
路面標示計測装置20は、インターフェース部28を介して画像データ及び座標データを取得し、記憶部27に保存する。
路面標示抽出部23は路面画像から一定以上の明度を有する特定点を抽出する(ステップ11)。続いて、路面標示認識部24が抽出された特定点の配置と標準パターンとが一致するかを判断し、一致するときは(ステップ13:Y)、標準パターンを路面標示として認識する(ステップ15)。認識された路面標示は路面標示データ保存領域275に保存される(ステップ17)。一方、特定点の配置と標準パターンとが一致しないときは(ステップ13:N)、オペレータの判断により、標準パターンに類似するものを選び出してもよい。
【0029】
以上のように、撮像部に備えられる光学機器は全周画像を取得することが可能であるため、車両に隣接する車線の路面画像の撮像ができる。撮像された路面画像から路面標示を計測し、それに座標情報を付加することにより、カーナビゲーション用の道路データに路面標示を関連付けることが可能となる。
【実施例2】
【0030】
図7は本発明の他の実施例であり、撮像された画像をもとに路面標示抽出部23が特定点を抽出する手段を示す図である。図7において、中心点から所定の間隔のもとに同心円を設定し、さらに中心点から下方向及び左右下方向に放射線を設定する。これら同心円上及び放射線上において、所定のしきい値以上の明度を有する点を解析することで特定点の抽出を行う。
図8は図7の放射線上の明度を解析することで得られた特定点の二次元プロット図である。
【0031】
以下に、本実施例の動作を説明する。
図9は路面撮像装置10の動作(図9(A))及び路面標示計測装置20の動作(図9(B))を示すフローチャートである。
車両が所定の距離を移動することでパルス信号が発生し(ステップ21:Y)、撮像部13が路面を撮像する(ステップ23)。また、座標取得部15がGPS衛星から座標情報を取得する(ステップ25)。撮像された路面画像と取得した座標情報は記憶部17にそれぞれが関連づけられて保存される(ステップ27)。
【0032】
路面標示計測装置20は、インターフェース部28を介して画像データ及び座標データを取得し、それらのデータを記憶部27に保存する。
次に、路面標示抽出部23は路面画像の同心円上から一定以上の明度を有する特定点を抽出する(ステップ31)。次に、放射線上から一定以上の明度を有する特定点を抽出する(ステップ33)。続いて、路面標示認識部24が抽出された特定点の配置と標準パターンとが一致するかを判断し、一致するときは(ステップ35:Y)、標準パターンを路面標示として認識する(ステップ37)。認識された路面標示は路面標示データ保存領域275に保存される(ステップ39)。一方、特定点の配置と標準パターンとが一致しないときは(ステップ35:N)、オペレータの判断により、標準パターンに類似するものを選び出してもよい。
【0033】
以上のように、撮像された画像の中心点から下方向及び左右下方向に放射線を設定することで、隣接する同心円上に路面標示がかからない場合であっても、特定点の検出をすることが可能となる。
【0034】
この発明は、上記発明の実施の形態及び実施例の説明に何ら限定されるものではない。特許請求の範囲の記載を逸脱せず、当業者が容易に想到できる範囲で種々の変形態様もこの発明に含まれる。
【図面の簡単な説明】
【0035】
【図1】図1は実施例1の路面標示計測装置の概略図である。
【図2】図2は路面撮像装置を搭載した測定用車両の一例を示す図である。(A)及び(B)は遮光手段の一例である。(C)は凸面鏡を備えた撮像部の斜視図である。
【図3】図3は撮像部で撮像された路面画像の一例である。
【図4】図4は路面標示抽出部が撮像された画像をもとに特定点を抽出する手段を示す図である。
【図5】図5は図4で得られた特定点を三次元プロットにした図である。
【図6】図6は路面撮像装置10の動作(A)及び路面標示計測装置20の動作(B)を示すフローチャートである。
【図7】図7は実施例2の路面標示計測装置を用いて、撮像された画像をもとに特定点を計測する手段を示す図である。
【図8】図8は図7で得られた特定点を二次元プロットした図である。
【図9】図9は路面撮像装置10の動作(A)及び路面標示計測装置20の動作(B)を示すフローチャートである。
【図10】図10は撮像部の光軸方向を車両真下に向けたときに撮像される路面画像のイメージ図である。
【符号の説明】
【0036】
10 路面撮像装置、13 撮像部、15 座標取得部、20 路面標示計測装置、23 路面標示抽出部、24 路面標示認識部
【特許請求の範囲】
【請求項1】
車両に搭載され、地図の属性情報として使用される路面標示を計測するための路面画像を撮像する路面撮像装置であって、
全周画像を取得可能な光学機器を備える撮像部を有する、
ことを特徴とする路面撮像装置。
【請求項2】
前記光学機器は魚眼レンズ又は凸面鏡である、ことを特徴とする請求項1に記載の路面撮像装置。
【請求項3】
前記撮像部は前記車両の頂部に取り付けられる、ことを特徴とする請求項1に記載の路面撮像装置。
【請求項4】
前記撮像部は前記車両の前方に向けて取り付けられる、ことを特徴とする請求項1に記載の路面撮像装置。
【請求項5】
前記魚眼レンズまたは凸面鏡の光軸方向は車両の進行方向と略平行である、ことを特徴とする請求項2に記載の路面撮像装置。
【請求項6】
前記魚眼レンズまたは凸面鏡には遮光手段が設けられ、上方ないし光軸方向からの光を遮光する、ことを特徴とする請求項5に記載の路面撮像装置。
【請求項7】
車両に搭載され、地図の属性情報として使用される路面標示を計測するための路面画像を撮像する路面撮像装置であって、
魚眼レンズ又は凸面鏡を備える撮像部を有する、
ことを特徴とする路面撮像装置。
【請求項8】
請求項1〜7のいずれかの路面撮像装置で得られた路面画像に基づいて路面標示を計測する路面標示計測装置であって、
路面画像から所定のルールに従い路面標示に対応する特定点を抽出する路面標示抽出部と、
前記路面標示抽出部で抽出された前記特定点に基づいて、路面標示を認識する路面標示認識部と、
を備えてなる、路面標示計測装置。
【請求項9】
前記路面標示抽出部は前記路面画像の中心を中心点として同心円を設定し、前記同心円上の明度を解析することで前記特定点を抽出する、ことを特徴とする請求項8に記載の路面標示計測装置。
【請求項10】
前記路面標示抽出部は前記路面画像の中心を中心点として同心円を設定し、さらに前記画像の中心点から前記画面の下方向に直線を設定し、前記同心円上及び前記直線上の明度を解析することで前記特定点を抽出する、ことを特徴とする請求項8に記載の路面標示計測装置。
【請求項11】
前記路面標示抽出部は前記路面画像の中心を中心点として同心円を設定し、さらに前記画像の中心点から複数の放射線を設定し、前記同心円上及び前記放射線上の明度を解析することで前記特定点を抽出する、ことを特徴とする請求項8に記載の路面標示計測装置。
【請求項12】
前記路面標示抽出部は前記路面画像の明度の大きさを解析することにより、路面標示の色を判定する、ことを特徴とする請求項8に記載の路面標示計測装置。
【請求項13】
前記路面標示抽出部は前記路面画像の下半分の一部又は全部の画像について走査範囲を設定し、特定点を抽出する、ことを特徴とする請求項8に記載の路面標示計測装置。
【請求項1】
車両に搭載され、地図の属性情報として使用される路面標示を計測するための路面画像を撮像する路面撮像装置であって、
全周画像を取得可能な光学機器を備える撮像部を有する、
ことを特徴とする路面撮像装置。
【請求項2】
前記光学機器は魚眼レンズ又は凸面鏡である、ことを特徴とする請求項1に記載の路面撮像装置。
【請求項3】
前記撮像部は前記車両の頂部に取り付けられる、ことを特徴とする請求項1に記載の路面撮像装置。
【請求項4】
前記撮像部は前記車両の前方に向けて取り付けられる、ことを特徴とする請求項1に記載の路面撮像装置。
【請求項5】
前記魚眼レンズまたは凸面鏡の光軸方向は車両の進行方向と略平行である、ことを特徴とする請求項2に記載の路面撮像装置。
【請求項6】
前記魚眼レンズまたは凸面鏡には遮光手段が設けられ、上方ないし光軸方向からの光を遮光する、ことを特徴とする請求項5に記載の路面撮像装置。
【請求項7】
車両に搭載され、地図の属性情報として使用される路面標示を計測するための路面画像を撮像する路面撮像装置であって、
魚眼レンズ又は凸面鏡を備える撮像部を有する、
ことを特徴とする路面撮像装置。
【請求項8】
請求項1〜7のいずれかの路面撮像装置で得られた路面画像に基づいて路面標示を計測する路面標示計測装置であって、
路面画像から所定のルールに従い路面標示に対応する特定点を抽出する路面標示抽出部と、
前記路面標示抽出部で抽出された前記特定点に基づいて、路面標示を認識する路面標示認識部と、
を備えてなる、路面標示計測装置。
【請求項9】
前記路面標示抽出部は前記路面画像の中心を中心点として同心円を設定し、前記同心円上の明度を解析することで前記特定点を抽出する、ことを特徴とする請求項8に記載の路面標示計測装置。
【請求項10】
前記路面標示抽出部は前記路面画像の中心を中心点として同心円を設定し、さらに前記画像の中心点から前記画面の下方向に直線を設定し、前記同心円上及び前記直線上の明度を解析することで前記特定点を抽出する、ことを特徴とする請求項8に記載の路面標示計測装置。
【請求項11】
前記路面標示抽出部は前記路面画像の中心を中心点として同心円を設定し、さらに前記画像の中心点から複数の放射線を設定し、前記同心円上及び前記放射線上の明度を解析することで前記特定点を抽出する、ことを特徴とする請求項8に記載の路面標示計測装置。
【請求項12】
前記路面標示抽出部は前記路面画像の明度の大きさを解析することにより、路面標示の色を判定する、ことを特徴とする請求項8に記載の路面標示計測装置。
【請求項13】
前記路面標示抽出部は前記路面画像の下半分の一部又は全部の画像について走査範囲を設定し、特定点を抽出する、ことを特徴とする請求項8に記載の路面標示計測装置。
【図1】


【図2】
【図4】

【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図3】

【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図3】
【公開番号】特開2007−133007(P2007−133007A)
【公開日】平成19年5月31日(2007.5.31)
【国際特許分類】
【出願番号】特願2005−323686(P2005−323686)
【出願日】平成17年11月8日(2005.11.8)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 1 社団法人日本写真測量学会 平成17年度秋季学術講演会発表論文集 平成17年10月26日 2 平成17年度秋季学術講演会 社団法人日本写真測量学会 平成17年10月26〜27日
【出願人】(501271479)株式会社トヨタマップマスター (56)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
【公開日】平成19年5月31日(2007.5.31)
【国際特許分類】
【出願日】平成17年11月8日(2005.11.8)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 1 社団法人日本写真測量学会 平成17年度秋季学術講演会発表論文集 平成17年10月26日 2 平成17年度秋季学術講演会 社団法人日本写真測量学会 平成17年10月26〜27日
【出願人】(501271479)株式会社トヨタマップマスター (56)
【出願人】(000135771)株式会社パスコ (102)
【Fターム(参考)】
[ Back to top ]