
車上装置
【目的】 基準電流レベルを移動体位置に応じて変化させ、軌道回路の各位置において、軌道回路の異常を確実に検知し得る車上装置を提供する。
【構成】 受信回路21は、受信アンテナ211が軌道回路11に流れる軌道電流Is1を受信し、信号処理回路212が軌道電流Is1に基づく電流検出信号S1 を出力する。基準電流設定部22は、軌道回路11内の移動体位置Px と受信される軌道電流Is1との関係に基づく基準電流デ−タIk を有し、走行距離信号S2 が入力され、走行距離信号S2 から移動体位置Px を割り出し、その移動体位置Px に対応する基準電流を基準電流デ−タIk から読み出し、基準電流信号S3 として出力する。判定部23は、電流検出信号S1 と基準電流信号S3 とを比較し、軌道回路11の状態を判定する。
【構成】 受信回路21は、受信アンテナ211が軌道回路11に流れる軌道電流Is1を受信し、信号処理回路212が軌道電流Is1に基づく電流検出信号S1 を出力する。基準電流設定部22は、軌道回路11内の移動体位置Px と受信される軌道電流Is1との関係に基づく基準電流デ−タIk を有し、走行距離信号S2 が入力され、走行距離信号S2 から移動体位置Px を割り出し、その移動体位置Px に対応する基準電流を基準電流デ−タIk から読み出し、基準電流信号S3 として出力する。判定部23は、電流検出信号S1 と基準電流信号S3 とを比較し、軌道回路11の状態を判定する。
【発明の詳細な説明】
【0001】
【産業上の利用分野】本発明は、移動体に搭載される車上装置に関し、更に詳しくは、基準電流レベルを移動体位置に応じて変化させ、軌道回路の異常を確実に検知する技術に係る。
【0002】
【従来の技術】車上装置を含む移動体制御装置の一例として自動列車停止装置(以下、ATS装置と称する。)があり、ATS装置の一例として、ATS−SP形が知られている。ATS−SP形は、ATS−S形をインテリジェント化したものであり、軌道回路の条件を取り入れ、軌道回路が正常である場合において、列車が停止信号を現示する信号機までに停止できるかどうかの判断を自動的に行なうものである。軌道回路の条件を取り入れているのは、軌道回路電流を列車検知や踏切に支障が発生した場合の異常処理信号として利用しているからである。
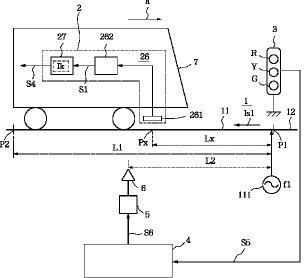
【0003】図3は従来の車上装置の構成を示すブロック図である。図はATS−SP形に適用した車上装置を示し、1は軌道、2は車上装置、3は信号機、4は地上装置、5は中継器、6は地上子、7は移動体である。
【0004】軌道1は、複数の閉塞区間(軌道回路)11、12・・・に区画されている。軌道回路11は、軌道回路送信器111が進路前方の一端P1に設けられている。軌道回路送信器111は、周波数f1 の軌道電流Is1を軌道回路11に供給する。軌道回路11は、移動体7の車軸により軌間短絡される。軌道回路12も同様に構成され、図示しない軌道回路送信器121が周波数f2 の軌道電流Is2を軌道回路12に供給する。
【0005】車上装置2は、受信回路26と、判定部27とを含んでいる。受信回路26は、受信アンテナ261と、信号処理回路262とを有している。受信アンテナ261は、軌道回路11に流れる軌道電流Is1を受信する。信号処理回路262は、軌道電流Is1に基づく電流検出信号S1 を出力する。判定部27は、一定の値に設定された基準電流レベルIk を有し、電流検出信号S1 が基準電流レベルIk より低下したときに軌道回路が異常であると判定し、判定信号S4 を出力する。
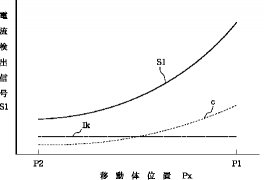
【0006】図4は従来の車上装置の軌道回路状態判定動作を説明する図である。図において、S1 は軌道回路が正常である場合の電流検出信号である。横軸は送信点P1から移動体位置Px までの距離であり、縦軸は移動体位置Px で受信される軌道電流Is1の電流レベルである。以下、図3を参照しながら、図4を説明する。
【0007】図示したように、軌道電流Is1は、軌間のリ−ク電流により送信端P1 から離れるほど減衰し、他端P2 で最小となる。判定部27の基準電流レベルIk は、軌道回路11の全範囲で異常判定を確実にするために、電流検出信号S1 の最小値よりも小さい値に設定されている。判定部27は、雨天等で軌道1のリ−ク電流が増大し、軌道電流Is1が基準電流レベルIk 以下に減少した場合に異常と判定し、判定信号S4 を出力する。また、踏切で支障事故が発生し、その異常処置として送信点近傍の軌間短絡により軌道電流Is1が減少させられた場合も異常と判定し、判定信号S4 を出力する。異常と判定した判定信号S4 は、フェールセーフの観点から、移動体7に対する停止信号となる。
【0008】次に車上装置2のATS機能について、図3R>3を参照しながら説明する。地上装置4は、信号機3からの現示に従った入力信号S5 が入力され、入力信号S5 に従った制御信号S6 を出力する。制御信号S6 は、中継器5を介して地上子6から車上装置2に伝送される。地上子6は、信号機3の手前600mの位置に設けられている。地上装置4は、例えば入力信号S5 が停止信号(赤)の場合は、移動体7が地上子6上を通過するときに、警報信号を含む制御信号S6 を車上装置2に伝送する。
【0009】車上装置2は、地上子6から制御信号S6 が供給され、停止に至るまでの速度照査パタ−ンを設定し、移動体7の速度が速度照査パタ−ンを超えているときにブレ−キをかけるように制御する。
【0010】
【発明が解決しようとする課題】しかしながら、従来の車上装置は、図4に示すように、基準電流レベルIk が電流検出信号S1 よりも小さい値に設定されているので、移動体が送信端P1 に近い位置にあるときに軌道回路の異常が発生した場合は、参照符号cで示すように、電流検出信号S1 が基準電流レベルIk 以下とならず、軌道回路の異常検知ができない。このため、踏切で支障事故が発生した場合に、地上側で軌道回路電流を減少させて異常処理をしたにもかかわらず、車上側でこれを検知できず、最悪の場合、衝突事故を発生するおそれがある。
【0011】そこで、本発明の課題は、上述した問題点を解決し、基準電流レベルを移動体位置に応じて変化させ、軌道回路の各位置において、軌道回路の異常を確実に検知し得る車上装置を提供することである。
【0012】
【課題を解決するための手段】上述する課題解決のため、本発明は、受信回路と、基準電流設定部と、判定部とを含み、軌道上を走行する移動体に搭載される車上装置であって、前記受信回路は、受信アンテナと、信号処理回路とを有し、前記受信アンテナが軌道回路に流れる軌道電流を受信し、前記信号処理回路が前記軌道電流に基づく電流検出信号を出力する回路であり、前記基準電流設定部は、前記軌道回路内の移動体位置と受信される軌道電流との関係に基づく基準電流デ−タを有し、走行距離信号が入力され、前記走行距離信号から移動体位置を割り出し、その移動体位置に対応する基準電流を前記基準電流デ−タから読み出し、基準電流信号として出力するものであり、前記判定部は、前記電流検出信号と前記基準電流信号とを比較し、軌道回路の状態を判定する。
【0013】
【作用】受信回路は、受信アンテナが軌道回路に流れる軌道電流を受信し、信号処理回路が軌道電流に基づく電流検出信号を出力し、基準電流設定部は、軌道回路内の移動体位置と受信される軌道電流との関係に基づく基準電流デ−タを有し、走行距離信号が入力され、走行距離信号から移動体位置の位置を割り出し、その移動体位置に対応する基準電流を基準電流デ−タから読み出し、基準電流信号として出力するものであり、判定部は、電流検出信号と基準電流信号とを比較し、軌道回路の状態を判定するから、基準電流レベルを移動体位置に応じて変化させ、軌道回路の各位置において、軌道電流のレベルが一定の減衰率以上低下したときに軌道回路の異常を確実に検知できる。
【0014】
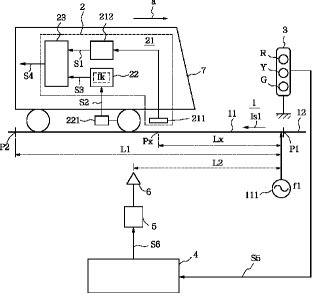
【実施例】図1は本発明に係る車上装置の構成を示すブロック図である。図は車上装置をATSーSP形に適用した場合を示し、図3と参照符号は同一性ある構成部分を示している。
【0015】車上装置2は、受信回路21と、基準電流設定部22と、判定部23とを含んでいる。受信回路21は、受信アンテナ211と、信号処理回路212とを有している。受信アンテナ211は、軌道回路11に流れる軌道電流Is1を受信する。信号処理回路212は、軌道電流Is1に基づく電流検出信号S1 を出力する。基準電流設定部22は、軌道回路11内の移動体位置Px と受信される軌道電流Is1との関係に基づく基準電流デ−タIk を有している。基準電流デ−タIk は、軌道回路11を試験走行して実測した軌道電流Is1から求めるか、または計算によって求められる。基準電流設定部22は、走行距離信号S2 が入力され、走行距離信号S2 から移動体位置Px を割り出し、その移動体位置Px に対応する基準電流を基準電流デ−タIk から読み出し、基準電流信号S3 として出力する。具体的には、軌道回路11の長さL1がデ−タとして与えられ、移動体7が位置P2 から所定の距離を移動する度にその移動体位置Px の基準電流デ−タIkに更新し、基準電流信号S3 を出力する。走行距離信号S2 は、タコジェネレータ221により車輪の回転数を検出して得ている。判定部23は、電流検出信号S1 と基準電流信号S3 とを比較して軌道回路11の状態を判定する。電流検出信号S1 が基準電流信号S3 より小さくなったときに異常と判定し、判定信号S4 を出力する。
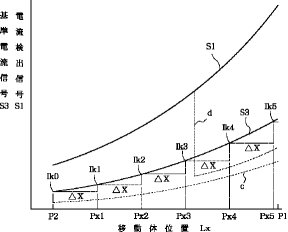
【0016】図2は本発明に係る車上装置の軌道回路状態判定動作を説明する図である。図において、S1 は電流検出信号、S3 は基準電流信号である。以下、図1を参照しながら、図2を作用と共に説明する。
【0017】電流検出信号S1 は、軌道回路11に異常がない場合に受信される軌道電流Is1を示している。基準電流信号S3 は、電流検出信号S1 の1/3〜1/4となるように設定されている。基準電流信号S3 は、複数の基準電流デ−タIk0、Ik1、Ik2・・・により近似されている。移動体7が位置P2 にあるときは、基準電流デ−タIk0となる。移動体7が距離△Xだけ移動し、移動体位置Px1にあると判定されたときは、基準電流デ−タIk1に更新される。以後、移動体7が距離△X移動する度に基準電流デ−タIk2、Ik3・・・に更新される。
【0018】以上述べたように、受信回路21は、受信アンテナ211が軌道回路11に流れる軌道電流Is1を受信し、信号処理回路212が軌道電流Is1に基づく電流検出信号S1 を出力し、基準電流設定部22は、軌道回路11内の移動体位置Pxと受信される軌道電流Is1との関係に基づく基準電流デ−タIk を有し、走行距離信号S2 が入力され、走行距離信号S2 から移動体位置Px を割り出し、その移動体位置Px に対応する基準電流を基準電流デ−タIk から読み出し、基準電流信号S3 として出力するものであり、判定部23は、電流検出信号S1 と基準電流信号S3 とを比較し、軌道回路の状態を判定するから、基準電流レベルIkを移動体位置Px に応じて変化させ、軌道回路11の各位置において、軌道電流Is1のレベルが一定の減衰率以上低下したときに軌道回路の異常を確実に検知できる。例えば、参照符号cで示すように、雨天等で軌道のリ−ク電流が増大し、軌道電流Is1が基準電流レベルIk 以下に減少した場合は、軌道回路11の各位置において異常を判定し、判定信号S4 を出力する。また、参照符号dで示すように、移動体7が移動体位置Px3を通過した時に踏切で支障事故が発生し、その異常処置として送信点近傍の軌間短絡により軌道電流Is1が減少させられた場合も、基準電流信号S3 が基準電流デ−タIk3に更新されているので、軌道電流Is1が基準電流デ−タIk0以下とならない場合でも異常を判定し、判定信号S4 を出力する。
【0019】他の軌道回路も同様に構成されている。隣接する軌道回路は、軌道電流Is の周波数が異なっている。このため、車上装置2は、軌道電流Is から走行している軌道回路を識別することができ、しかも識別した軌道回路の長さはデ−タとして所有しているから、各軌道回路において同様の異常判定ができる。
【0020】更に、図1の実施例では、ATS機能を発揮させるため、地上子6から車上装置2に制御信号S6 が伝送される。地上子6は送信点P1 から距離L2を隔てた位置に設けられているため、車上装置2は制御信号S6 を受信した時に、移動体位置の補正が可能となる。このため、基準電流デ−タIk を適切なものに設定でき、異常判定を更に確実なものとすることができる。
【0021】上述の実施例では、基準電流設定部22は、処理を容易にするため、移動体7が一定距離移動する度に基準電流デ−タIk を更新するように構成されているが、基準電流デ−タIk を大量に記憶し、走行距離信号S2 が入力される度にその移動体位置Px に対応する基準電流を基準電流デ−タIk から読み出し、基準電流信号S3 として出力するように構成してもよい。また、走行距離信号S2 は、移動体7の移動速度から求めることもできる。
【0022】
【発明の効果】以上述べたように、本発明は、受信回路は、受信アンテナが軌道回路に流れる軌道電流を受信し、信号処理回路が軌道電流に基づく電流検出信号を出力し、基準電流設定部は、軌道回路内の移動体位置と受信される軌道電流との関係に基づく基準電流デ−タを有し、走行距離信号が入力され、走行距離信号から移動体位置の位置を割り出し、その移動体位置に対応する基準電流を基準電流デ−タから読み出し、基準電流信号として出力するものであり、判定部は、電流検出信号と基準電流信号とを比較し、軌道回路の状態を判定するから、基準電流レベルを移動体の位置に応じて変化させ、軌道回路の各位置において、軌道回路の異常を確実に検知し得る車上装置を提供できる。
【図面の簡単な説明】
【図1】本発明に係る車上装置の構成を示すブロック図である。
【図2】本発明に係る車上装置の軌道回路状態判定動作を説明する図である。
【図3】従来の車上装置の構成を示すブロック図である。
【図4】従来の車上装置の軌道回路状態判定動作を説明する図である。
【符号の説明】
1 軌道
11、12 軌道回路
111 軌道回路送信器
2 車上装置
21 受信回路
211 受信アンテナ
212 信号処理回路
22 基準電流設定部
23 判定部
7 移動体
S1 電流検出信号
S2 走行距離信号
S3 基準電流信号
S4 判定信号
Ik 基準電流デ−タ
Is1 軌道電流
【0001】
【産業上の利用分野】本発明は、移動体に搭載される車上装置に関し、更に詳しくは、基準電流レベルを移動体位置に応じて変化させ、軌道回路の異常を確実に検知する技術に係る。
【0002】
【従来の技術】車上装置を含む移動体制御装置の一例として自動列車停止装置(以下、ATS装置と称する。)があり、ATS装置の一例として、ATS−SP形が知られている。ATS−SP形は、ATS−S形をインテリジェント化したものであり、軌道回路の条件を取り入れ、軌道回路が正常である場合において、列車が停止信号を現示する信号機までに停止できるかどうかの判断を自動的に行なうものである。軌道回路の条件を取り入れているのは、軌道回路電流を列車検知や踏切に支障が発生した場合の異常処理信号として利用しているからである。
【0003】図3は従来の車上装置の構成を示すブロック図である。図はATS−SP形に適用した車上装置を示し、1は軌道、2は車上装置、3は信号機、4は地上装置、5は中継器、6は地上子、7は移動体である。
【0004】軌道1は、複数の閉塞区間(軌道回路)11、12・・・に区画されている。軌道回路11は、軌道回路送信器111が進路前方の一端P1に設けられている。軌道回路送信器111は、周波数f1 の軌道電流Is1を軌道回路11に供給する。軌道回路11は、移動体7の車軸により軌間短絡される。軌道回路12も同様に構成され、図示しない軌道回路送信器121が周波数f2 の軌道電流Is2を軌道回路12に供給する。
【0005】車上装置2は、受信回路26と、判定部27とを含んでいる。受信回路26は、受信アンテナ261と、信号処理回路262とを有している。受信アンテナ261は、軌道回路11に流れる軌道電流Is1を受信する。信号処理回路262は、軌道電流Is1に基づく電流検出信号S1 を出力する。判定部27は、一定の値に設定された基準電流レベルIk を有し、電流検出信号S1 が基準電流レベルIk より低下したときに軌道回路が異常であると判定し、判定信号S4 を出力する。
【0006】図4は従来の車上装置の軌道回路状態判定動作を説明する図である。図において、S1 は軌道回路が正常である場合の電流検出信号である。横軸は送信点P1から移動体位置Px までの距離であり、縦軸は移動体位置Px で受信される軌道電流Is1の電流レベルである。以下、図3を参照しながら、図4を説明する。
【0007】図示したように、軌道電流Is1は、軌間のリ−ク電流により送信端P1 から離れるほど減衰し、他端P2 で最小となる。判定部27の基準電流レベルIk は、軌道回路11の全範囲で異常判定を確実にするために、電流検出信号S1 の最小値よりも小さい値に設定されている。判定部27は、雨天等で軌道1のリ−ク電流が増大し、軌道電流Is1が基準電流レベルIk 以下に減少した場合に異常と判定し、判定信号S4 を出力する。また、踏切で支障事故が発生し、その異常処置として送信点近傍の軌間短絡により軌道電流Is1が減少させられた場合も異常と判定し、判定信号S4 を出力する。異常と判定した判定信号S4 は、フェールセーフの観点から、移動体7に対する停止信号となる。
【0008】次に車上装置2のATS機能について、図3R>3を参照しながら説明する。地上装置4は、信号機3からの現示に従った入力信号S5 が入力され、入力信号S5 に従った制御信号S6 を出力する。制御信号S6 は、中継器5を介して地上子6から車上装置2に伝送される。地上子6は、信号機3の手前600mの位置に設けられている。地上装置4は、例えば入力信号S5 が停止信号(赤)の場合は、移動体7が地上子6上を通過するときに、警報信号を含む制御信号S6 を車上装置2に伝送する。
【0009】車上装置2は、地上子6から制御信号S6 が供給され、停止に至るまでの速度照査パタ−ンを設定し、移動体7の速度が速度照査パタ−ンを超えているときにブレ−キをかけるように制御する。
【0010】
【発明が解決しようとする課題】しかしながら、従来の車上装置は、図4に示すように、基準電流レベルIk が電流検出信号S1 よりも小さい値に設定されているので、移動体が送信端P1 に近い位置にあるときに軌道回路の異常が発生した場合は、参照符号cで示すように、電流検出信号S1 が基準電流レベルIk 以下とならず、軌道回路の異常検知ができない。このため、踏切で支障事故が発生した場合に、地上側で軌道回路電流を減少させて異常処理をしたにもかかわらず、車上側でこれを検知できず、最悪の場合、衝突事故を発生するおそれがある。
【0011】そこで、本発明の課題は、上述した問題点を解決し、基準電流レベルを移動体位置に応じて変化させ、軌道回路の各位置において、軌道回路の異常を確実に検知し得る車上装置を提供することである。
【0012】
【課題を解決するための手段】上述する課題解決のため、本発明は、受信回路と、基準電流設定部と、判定部とを含み、軌道上を走行する移動体に搭載される車上装置であって、前記受信回路は、受信アンテナと、信号処理回路とを有し、前記受信アンテナが軌道回路に流れる軌道電流を受信し、前記信号処理回路が前記軌道電流に基づく電流検出信号を出力する回路であり、前記基準電流設定部は、前記軌道回路内の移動体位置と受信される軌道電流との関係に基づく基準電流デ−タを有し、走行距離信号が入力され、前記走行距離信号から移動体位置を割り出し、その移動体位置に対応する基準電流を前記基準電流デ−タから読み出し、基準電流信号として出力するものであり、前記判定部は、前記電流検出信号と前記基準電流信号とを比較し、軌道回路の状態を判定する。
【0013】
【作用】受信回路は、受信アンテナが軌道回路に流れる軌道電流を受信し、信号処理回路が軌道電流に基づく電流検出信号を出力し、基準電流設定部は、軌道回路内の移動体位置と受信される軌道電流との関係に基づく基準電流デ−タを有し、走行距離信号が入力され、走行距離信号から移動体位置の位置を割り出し、その移動体位置に対応する基準電流を基準電流デ−タから読み出し、基準電流信号として出力するものであり、判定部は、電流検出信号と基準電流信号とを比較し、軌道回路の状態を判定するから、基準電流レベルを移動体位置に応じて変化させ、軌道回路の各位置において、軌道電流のレベルが一定の減衰率以上低下したときに軌道回路の異常を確実に検知できる。
【0014】
【実施例】図1は本発明に係る車上装置の構成を示すブロック図である。図は車上装置をATSーSP形に適用した場合を示し、図3と参照符号は同一性ある構成部分を示している。
【0015】車上装置2は、受信回路21と、基準電流設定部22と、判定部23とを含んでいる。受信回路21は、受信アンテナ211と、信号処理回路212とを有している。受信アンテナ211は、軌道回路11に流れる軌道電流Is1を受信する。信号処理回路212は、軌道電流Is1に基づく電流検出信号S1 を出力する。基準電流設定部22は、軌道回路11内の移動体位置Px と受信される軌道電流Is1との関係に基づく基準電流デ−タIk を有している。基準電流デ−タIk は、軌道回路11を試験走行して実測した軌道電流Is1から求めるか、または計算によって求められる。基準電流設定部22は、走行距離信号S2 が入力され、走行距離信号S2 から移動体位置Px を割り出し、その移動体位置Px に対応する基準電流を基準電流デ−タIk から読み出し、基準電流信号S3 として出力する。具体的には、軌道回路11の長さL1がデ−タとして与えられ、移動体7が位置P2 から所定の距離を移動する度にその移動体位置Px の基準電流デ−タIkに更新し、基準電流信号S3 を出力する。走行距離信号S2 は、タコジェネレータ221により車輪の回転数を検出して得ている。判定部23は、電流検出信号S1 と基準電流信号S3 とを比較して軌道回路11の状態を判定する。電流検出信号S1 が基準電流信号S3 より小さくなったときに異常と判定し、判定信号S4 を出力する。
【0016】図2は本発明に係る車上装置の軌道回路状態判定動作を説明する図である。図において、S1 は電流検出信号、S3 は基準電流信号である。以下、図1を参照しながら、図2を作用と共に説明する。
【0017】電流検出信号S1 は、軌道回路11に異常がない場合に受信される軌道電流Is1を示している。基準電流信号S3 は、電流検出信号S1 の1/3〜1/4となるように設定されている。基準電流信号S3 は、複数の基準電流デ−タIk0、Ik1、Ik2・・・により近似されている。移動体7が位置P2 にあるときは、基準電流デ−タIk0となる。移動体7が距離△Xだけ移動し、移動体位置Px1にあると判定されたときは、基準電流デ−タIk1に更新される。以後、移動体7が距離△X移動する度に基準電流デ−タIk2、Ik3・・・に更新される。
【0018】以上述べたように、受信回路21は、受信アンテナ211が軌道回路11に流れる軌道電流Is1を受信し、信号処理回路212が軌道電流Is1に基づく電流検出信号S1 を出力し、基準電流設定部22は、軌道回路11内の移動体位置Pxと受信される軌道電流Is1との関係に基づく基準電流デ−タIk を有し、走行距離信号S2 が入力され、走行距離信号S2 から移動体位置Px を割り出し、その移動体位置Px に対応する基準電流を基準電流デ−タIk から読み出し、基準電流信号S3 として出力するものであり、判定部23は、電流検出信号S1 と基準電流信号S3 とを比較し、軌道回路の状態を判定するから、基準電流レベルIkを移動体位置Px に応じて変化させ、軌道回路11の各位置において、軌道電流Is1のレベルが一定の減衰率以上低下したときに軌道回路の異常を確実に検知できる。例えば、参照符号cで示すように、雨天等で軌道のリ−ク電流が増大し、軌道電流Is1が基準電流レベルIk 以下に減少した場合は、軌道回路11の各位置において異常を判定し、判定信号S4 を出力する。また、参照符号dで示すように、移動体7が移動体位置Px3を通過した時に踏切で支障事故が発生し、その異常処置として送信点近傍の軌間短絡により軌道電流Is1が減少させられた場合も、基準電流信号S3 が基準電流デ−タIk3に更新されているので、軌道電流Is1が基準電流デ−タIk0以下とならない場合でも異常を判定し、判定信号S4 を出力する。
【0019】他の軌道回路も同様に構成されている。隣接する軌道回路は、軌道電流Is の周波数が異なっている。このため、車上装置2は、軌道電流Is から走行している軌道回路を識別することができ、しかも識別した軌道回路の長さはデ−タとして所有しているから、各軌道回路において同様の異常判定ができる。
【0020】更に、図1の実施例では、ATS機能を発揮させるため、地上子6から車上装置2に制御信号S6 が伝送される。地上子6は送信点P1 から距離L2を隔てた位置に設けられているため、車上装置2は制御信号S6 を受信した時に、移動体位置の補正が可能となる。このため、基準電流デ−タIk を適切なものに設定でき、異常判定を更に確実なものとすることができる。
【0021】上述の実施例では、基準電流設定部22は、処理を容易にするため、移動体7が一定距離移動する度に基準電流デ−タIk を更新するように構成されているが、基準電流デ−タIk を大量に記憶し、走行距離信号S2 が入力される度にその移動体位置Px に対応する基準電流を基準電流デ−タIk から読み出し、基準電流信号S3 として出力するように構成してもよい。また、走行距離信号S2 は、移動体7の移動速度から求めることもできる。
【0022】
【発明の効果】以上述べたように、本発明は、受信回路は、受信アンテナが軌道回路に流れる軌道電流を受信し、信号処理回路が軌道電流に基づく電流検出信号を出力し、基準電流設定部は、軌道回路内の移動体位置と受信される軌道電流との関係に基づく基準電流デ−タを有し、走行距離信号が入力され、走行距離信号から移動体位置の位置を割り出し、その移動体位置に対応する基準電流を基準電流デ−タから読み出し、基準電流信号として出力するものであり、判定部は、電流検出信号と基準電流信号とを比較し、軌道回路の状態を判定するから、基準電流レベルを移動体の位置に応じて変化させ、軌道回路の各位置において、軌道回路の異常を確実に検知し得る車上装置を提供できる。
【図面の簡単な説明】
【図1】本発明に係る車上装置の構成を示すブロック図である。
【図2】本発明に係る車上装置の軌道回路状態判定動作を説明する図である。
【図3】従来の車上装置の構成を示すブロック図である。
【図4】従来の車上装置の軌道回路状態判定動作を説明する図である。
【符号の説明】
1 軌道
11、12 軌道回路
111 軌道回路送信器
2 車上装置
21 受信回路
211 受信アンテナ
212 信号処理回路
22 基準電流設定部
23 判定部
7 移動体
S1 電流検出信号
S2 走行距離信号
S3 基準電流信号
S4 判定信号
Ik 基準電流デ−タ
Is1 軌道電流
【特許請求の範囲】
【請求項1】 受信回路と、基準電流設定部と、判定部とを含み、軌道上を走行する移動体に搭載される車上装置であって、前記受信回路は、受信アンテナと、信号処理回路とを有し、前記受信アンテナが軌道回路に流れる軌道電流を受信し、前記信号処理回路が前記軌道電流に基づく電流検出信号を出力する回路であり、前記基準電流設定部は、前記軌道回路内の移動体位置と受信される軌道電流との関係に基づく基準電流デ−タを有し、走行距離信号が入力され、前記走行距離信号から移動体位置を割り出し、その移動体位置に対応する基準電流を前記基準電流デ−タから読み出し、基準電流信号として出力するものであり、前記判定部は、前記電流検出信号と前記基準電流信号とを比較し、前記軌道回路の状態を判定する車上装置。
【請求項1】 受信回路と、基準電流設定部と、判定部とを含み、軌道上を走行する移動体に搭載される車上装置であって、前記受信回路は、受信アンテナと、信号処理回路とを有し、前記受信アンテナが軌道回路に流れる軌道電流を受信し、前記信号処理回路が前記軌道電流に基づく電流検出信号を出力する回路であり、前記基準電流設定部は、前記軌道回路内の移動体位置と受信される軌道電流との関係に基づく基準電流デ−タを有し、走行距離信号が入力され、前記走行距離信号から移動体位置を割り出し、その移動体位置に対応する基準電流を前記基準電流デ−タから読み出し、基準電流信号として出力するものであり、前記判定部は、前記電流検出信号と前記基準電流信号とを比較し、前記軌道回路の状態を判定する車上装置。
【図2】


【図4】
【図1】

【図3】
【図4】
【図1】
【図3】
【公開番号】特開平6−171509
【公開日】平成6年(1994)6月21日
【国際特許分類】
【出願番号】特願平4−353328
【出願日】平成4年(1992)12月11日
【出願人】(000173784)財団法人鉄道総合技術研究所 (1,666)
【出願人】(000004651)日本信号株式会社 (720)
【公開日】平成6年(1994)6月21日
【国際特許分類】
【出願日】平成4年(1992)12月11日
【出願人】(000173784)財団法人鉄道総合技術研究所 (1,666)
【出願人】(000004651)日本信号株式会社 (720)
[ Back to top ]