
車両の制動制御装置
【課題】電気モータによって制動トルクを発生する車両の制動制御装置であって、電気モータの慣性を含む装置全体の慣性の影響を適正に補償し得るものを提供すること。
【解決手段】この装置では、制動操作部材の操作量Bpaに基づいて演算された目標通電量に基づいて電気モータが制御される。ブレーキアクチュエータの応答を表す時定数τmを有する遅れ要素DLY、及び、操作量Bpaに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償通電量Ijt,Iktが演算される。この慣性補償通電量Ijt,Iktに基づいて前記目標通電量Imtが演算される。
【解決手段】この装置では、制動操作部材の操作量Bpaに基づいて演算された目標通電量に基づいて電気モータが制御される。ブレーキアクチュエータの応答を表す時定数τmを有する遅れ要素DLY、及び、操作量Bpaに基づいて、ブレーキアクチュエータの慣性の影響を補償する慣性補償通電量Ijt,Iktが演算される。この慣性補償通電量Ijt,Iktに基づいて前記目標通電量Imtが演算される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の制動制御装置に関する。
【背景技術】
【0002】
従来より、電気モータによって制動トルクを発生する車両の制動制御装置が知られている。この種の装置では、通常、運転者による車両の制動操作部材の操作量に基づいて指示電流(目標電流)が演算され、指示電流に基づいて電気モータが制御される。これにより、制動操作部材の操作に応じた制動トルクが車輪に付与される。
【0003】
この種の装置では、電気モータの慣性を含む装置全体の慣性(慣性モーメント、慣性質量)の影響に起因して、特に急制動時(急激に制動トルクが増加するとき)等において、電気モータの回転速度が増加する加速時(例えば、電気モータが起動するとき)における制動トルクの応答遅れ(立上りの遅れ)、並びに、電気モータの回転速度が減少する減速時(例えば、電気モータが停止に向かうとき)における制動トルクのオーバシュートが発生し得る。従って、特に急制動時において、上記慣性の影響を補償すること、即ち、電気モータの加速時における制動トルクの応答性(立上り性能)の向上、並びに、電気モータの減速時における制動トルクのオーバシュートの抑制(収束性の向上)が望まれている。
【0004】
この問題に対処するため、例えば、特許文献1には、以下のことが記載されている。即ち、指示電流と目標モータ回転角との関係を規定するマップに基づいて、演算された指示電流に対応する目標モータ回転角が求められ、この目標モータ回転角を2階微分することにより、目標モータ回転角加速度が求められる。この目標モータ回転角加速度に基づいて、装置全体の慣性の影響を補償するための慣性補償電流が演算される。この場合、慣性補償電流は、電気モータの加速時には正の値に演算され、電気モータの減速時には負の値に演算される。この慣性補償電流が指示電流に加算されて、補償後指示電流(目標電流)が決定される。これにより、電気モータが起動するときには補償後指示電流が指示電流より大きめに演算されて、制動トルクの応答性が向上し得る。電気モータが停止に向かうときには補償後指示電流が指示電流より小さめに演算されて、制動トルクのオーバシュートが抑制され得る。
【0005】
また、特許文献1には、安定した制御を行うため、指示電流が電気モータの能力を超えた場合には、指示電流に「傾き制限」を設けることも記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−225690号公報
【発明の概要】
【0007】
ところで、上記文献に記載のように、指示電流から演算される目標モータ回転角加速度に基づいて慣性補償電流が演算される場合において、指示電流に傾き制限が設けられると、指示電流に基づいて得られる目標モータ回転角を2階微分して得られる目標モータ回転角加速度が適正に演算され得なくなる。例えば、指示電流が一定の傾き制限値で制限されている場合、指示電流の2階微分値に相当する目標モータ回転角加速度は「ゼロ(0)」に維持される。この結果、上記慣性の影響の適切な(高精度な)補償が困難となる場合がある。
【0008】
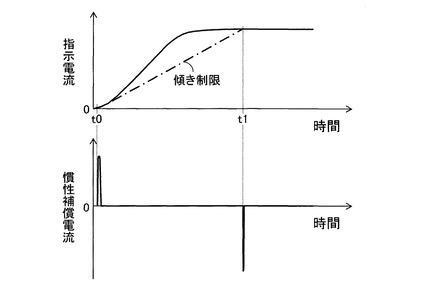
以下、このことについて図12を参照しながら説明する。図12に示す例では、時刻t0にて電気モータが起動し、「時刻t0の短期間後の時点」から「本来の指示電流(実線を参照)と傾き制限がなされた指示電流(一点鎖線を参照)とが交わる時刻t1」までの間、指示電流が一定の傾き制限値で制限されている。この場合、時刻t0からの前記短期間だけ電気モータの回転速度が増加し(従って、正の目標モータ回転角加速度が発生し)、時刻t1からの極短期間だけ電気モータの回転速度が減少し(従って、負の目標モータ回転角加速度が発生し)、その他の期間は電気モータの回転速度が一定に維持される(従って、目標モータ回転角加速度がゼロ(0)に維持される)。即ち、図12に示すように、時刻t0からの前記短期間だけ正の慣性補償電流が発生し、時刻t1からの極短期間だけ負の慣性補償電流が発生し、その他の期間は慣性補償電流がゼロ(0)に維持される。
【0009】
このため、電気モータの加速時における制動トルクの応答性が十分に向上され得ず、また、電気モータの減速時における制動トルクのオーバシュートが十分に抑制され得なかった。上記慣性の影響の更なる適正な補償が望まれているところである。
【0010】
本発明は、上記問題に対処するためになされたものであり、その目的は、電気モータによって制動トルクを発生する車両の制動制御装置であって、電気モータの慣性を含む装置全体の慣性の影響を適正に補償し得るものを提供することにある。
【0011】
本発明に係る車両の制動制御装置は、運転者による車両の制動操作部材(BP)の操作量(Bpa)を取得する操作量取得手段(BPA)と、前記車両の車輪(WHL)に対する制動トルクを電気モータ(MTR)によって発生させる制動手段(BRK)と、前記操作量(Bpa)に基づいて目標通電量(Imt)を演算し、前記目標通電量(Imt)に基づいて前記電気モータ(MTR)を制御する制御手段(CTL)とを備える。
【0012】
本発明の特徴は、前記制御手段(CTL)が、前記制動手段(BRK)の応答を表す時定数(τm)を有する遅れ要素(DLY)、及び、前記操作量(Bpa)に基づいて、前記制動手段(BRK)の慣性の影響を補償する慣性補償通電量(Ijt,Ikt)を演算し、前記慣性補償通電量(Ijt,Ikt)に基づいて前記目標通電量(Imt)を演算するように構成されたことにある。
【0013】
電気モータの加速時(特に、起動時)の制動トルクの応答性を確保するためには、電気モータの軸受け等の静摩擦の影響を補償するとともに、装置全体の慣性の影響を補償して電気モータの動き出し(停止状態からの動き始め)を改善することが重要である。上記構成によれば、制動手段の実際の応答が、上述した「傾き制限」に代えて「時定数(遅れ要素の応答の速さを示すパラメータ)を用いた遅れ要素」に基づいて表されることによって、電気モータの加速開始直後における慣性補償電流が適正に演算され得る(後述する図5を参照)。従って、電気モータを含む装置全体の慣性、及び、軸受け等の静摩擦の影響が補償され、電気モータの動き出しの制動トルクの応答性が効率的に向上され得る。
【0014】
同様に、電気モータの減速時(電気モータが運動状態から停止状態に移行する場合)においても、電気モータの減速初期の慣性の補償が重要となる。上記構成によれば、制動手段の実際の応答が、上述した「傾き制限」に代えて「時定数を用いた遅れ要素」に基づいて表されることによって、電気モータの減速開始直後における慣性補償電流が適正に演算され得る(後述する図5を参照)。従って、電気モータの減速開始直後における電気モータの減速度が増大され、制動トルクのオーバシュートが効率的に抑制され得る。以上、上記構成によれば、電気モータの慣性を含む装置全体の慣性の影響が効率的且つ適正に補償され得る。
【0015】
上記制動制御装置においては、前記制御手段(CTL)は、前記遅れ要素(DLY)、及び、前記操作量(Bpa)に基づいて処理値(fBp,fFb,fMk)を演算し、前記処理値(fBp,fFb,fMk)を2階微分して加速度相当値(ddfBp,ddfFb,ddfMk)を演算し、前記加速度相当値(ddfBp,ddfFb,ddfMk)に基づいて前記慣性補償通電量(Ijt,Ikt)を演算するように構成されることが好適である。
【0016】
装置全体の慣性(特に、電気モータの慣性)を補償するトルクは、電気モータの回転角加速度に比例する。この点を考慮すると、慣性補償を適切に行うためには、慣性補償通電量が電気モータの回転角加速度(又は、それに相当する同じ次元の値)に基づいて演算されることが重要となる。上記構成は係る知見に基づく。
【0017】
上記制動制御装置においては、前記操作量(Bpa)が大きいほど、前記時定数(τm)を相対的に大きい値に決定するように構成されることが好ましい。これによれば、操作量が小さい段階、即ち、電気モータの加速開始直後(電気モータの起動時)には時定数が小さい値に設定されるとともに、操作量が大きい段階、即ち、電気モータの減速時には時定数が大きい値に設定される。この結果、電気モータの起動時には制動トルクの応答性が確保され得、電気モータの減速時には慣性補償通電量の演算に使用される前記加速度相当値が適正に演算され得る。
【0018】
上記制動制御装置においては、前記制御手段(CTL)は、前記加速度相当値(ddfBp,ddfFb,ddfMk)が第1の所定加速度(ddb1)を超過する場合に、予め設定された時系列の第1パターン(CHj)に基づいて前記目標通電量(Imt)を増加するための第1の前記慣性補償通電量(Ijt)を演算し、前記加速度相当値(ddfBp,ddfFb,ddfMk)が第2の所定加速度(ddb2)を下回る場合に、予め設定された時系列の第2パターン(CHk)に基づいて前記目標通電量(Imt)を減少するための第2の前記慣性補償通電量(Ikt)を演算するように構成されることが好適である。
【0019】
慣性補償制御の効果を高めるためには、運動における初期の加減速を補償することが重要である。上記構成によれば、電気モータが加減速運動を開始した初期段階の慣性が補償されるように、予め設定された時系列のパターンに基づいて適正な慣性補償通電量が演算され得る。更には、慣性補償制御の開始は加速度相当値に基づいて決定され得る。なお、時系列のパターンは、電気モータの慣性に依存する特性であり、実験等によって求められ得る。
【0020】
上記制動制御装置においては、前記電気モータ(MTR)の実際の通電量(Ima)を取得する通電量取得手段(IMA)を備え、前記制御手段(CTL)が、前記加速度相当値(ddfBp,ddfFb,ddfMk)が第1の所定加速度(ddb1)を超過する場合に、予め設定された時系列の第1パターン(CHj)に基づいて前記目標通電量(Imt)を増加するための第1の前記慣性補償通電量(Ijt)を演算するとともに、前記第1の慣性補償通電量(Ijt)に対応して取得された前記実際の通電量(Ima)に基づいて前記第1パターン(CHj)に対応する時系列データ(Jdk)を取得し、前記加速度相当値(ddfBp,ddfFb,ddfMk)が第2の所定加速度(ddb2)を下回る場合に、前記時系列データ(Jdk)に基づいて前記目標通電量(Imt)を減少するための第2の前記慣性補償通電量(Ikt)を演算するように構成されることが好適である。
【0021】
電源電圧等の状態によっては、目標通電量に対して実際の通電量が不足する場合も考えられ得る。上記構成によれば、電気モータの加速時における実際の通電量に基づいて電気モータの減速時の慣性補償通電量(従って、目標通電量)が決定される。この結果、電源電圧等の状況に応じた適切な慣性補償制御が実行され得る。
【0022】
上記制動制御装置においては、前記制御手段(CTL)は、前記操作量(Bpa)に基づいて、前記制動操作部材(BP)の操作速度が増加する加速状態か否かを判定し、前記加速状態を判定する場合(FLa=1)には前記遅れ要素(DLY)による演算処理を行わず、前記加速状態を判定しない場合(FLa=0)には前記遅れ要素(DLY)による演算処理を行うように構成されることが好ましい。
【0023】
一般に、状態量に対して遅れ要素による演算処理がなされると、応答性については不利になる。上記構成によれば、制動操作が加速状態にあるとき(制動操作部材の操作速度が増加していくとき)、即ち、制動トルクの応答性が要求される度合いが高いときには、遅れ要素による演算処理が禁止されて、制動トルクの応答性が確保され得る。
【図面の簡単な説明】
【0024】
【図1】本発明の実施形態に係る制動制御装置を搭載した車両の概略構成図である。
【図2】図1に示した制動手段(ブレーキアクチュエータ)(Z部)の構成を説明するための図である。
【図3】図1に示した制御手段(ブレーキコントローラ)を説明するための機能ブロック図である。
【図4】図3に示した慣性補償制御ブロックの第1実施形態を説明するための機能ブロック図である。
【図5】遅れ要素による演算処理がなされることによる作用・効果を説明するための図である。
【図6】図3に示した慣性補償制御ブロックの第2実施形態を説明するための機能ブロック図である。
【図7】図3に示した慣性補償制御ブロックの第3実施形態を説明するための機能ブロック図である。
【図8】制動手段(ブレーキアクチュエータ)の最大応答を説明するための図である。
【図9】図3に示した慣性補償制御ブロックの第4実施形態を説明するための機能ブロック図である。
【図10】図3に示した慣性補償制御ブロックの第5実施形態を説明するための機能ブロック図である。
【図11】図3に示した慣性補償制御ブロックの第6実施形態を説明するための機能ブロック図である。
【図12】従来の制動制御装置によって指示電流に傾き制限が設けられる場合における、慣性補償電流の演算結果の一例を示したタイムチャートである。
【発明を実施するための形態】
【0025】
以下、本発明に係る車両の制動制御装置の実施形態について図面を参照しつつ説明する。
【0026】
<本発明に係る車両の制動制御装置を搭載した車両全体の構成>
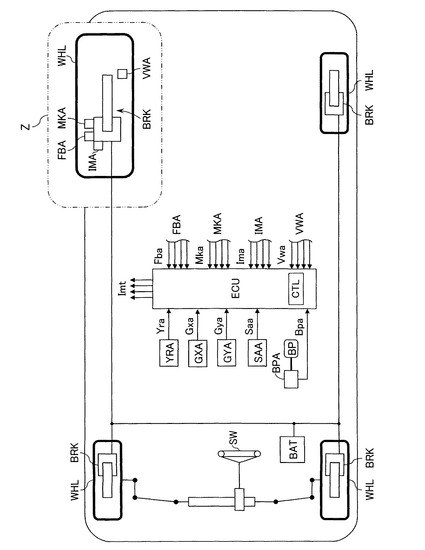
図1に示すように、この車両には、運転者が車両を減速するために操作する制動操作部材(例えば、ブレーキペダル)BP、各車輪の制動トルクを調整して各車輪に制動力を発生させる制動手段(ブレーキアクチュエータ)BRK、BRKを制御する電子制御ユニットECU、及び、BRK、ECU等に電力を供給する電源としての蓄電池BATが搭載されている。
【0027】
また、この車両には、BPの操作量Bpaを検出する制動操作量取得手段(例えば、ストロークセンサ、踏力センサ)BPA、運転者によるステアリングホイールSWの操作角Saaを検出する操舵角検出手段SAA、車両のヨーレイトYraを検出するヨーレイト検出手段YRA、車両の前後加速度Gxaを検出する前後加速度検出手段GXA、車両の横加速度Gyaを検出する横加速度検出手段GYA、及び、各車輪WHLの回転速度(車輪速度)Vwaを検出する車輪速度検出手段VWAが備えられている。
【0028】
制動手段BRKには、電気モータMTR(図示せず)が備えられ、MTRによって車輪WHLの制動トルクが制御される。また、BRKには、摩擦部材が回転部材を押す力Fbaを検出する押し力検出手段(例えば、軸力センサ)FBA、MTRの通電量(例えば、電流値)Imaを検出する通電量検出手段(例えば、電流センサ)IMA、MTRの位置(例えば、回転角)Mkaを検出する位置検出手段(例えば、回転角センサ)MKAが備えられている。
【0029】
上述した種々の検出手段の検出信号(Bpa等)は、ノイズ除去(低減)フィルタ(例えば、ローパスフィルタ)の処理がなされて、ECUに供給される。ECUでは、本発明に係わる制動制御の演算処理が実行される。即ち、後述する制御手段CTLがECU内にプログラムされ、Bpa等に基づいて電気モータMTRを制御するための目標通電量(例えば、目標電流値、目標デューティ比)Imtが演算される。また、ECUでは、Vwa、Yra等に基づいて、公知のアンチスキッド制御(ABS)、トラクション制御(TCS)、車両安定化制御(ESC)等の演算処理が実行される。
【0030】
<制動手段(ブレーキアクチュエータ)BRKの構成>
本発明に係る制動制御装置では、車輪WHLの制動トルクの発生、及び調整が、電気モータMTRによって行われる。
【0031】
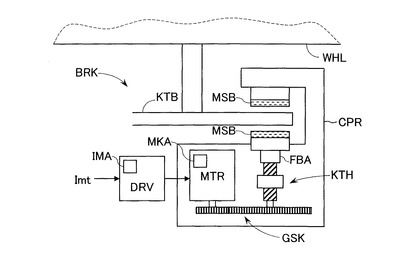
図1のZ部の拡大図である図2に示すように、制動手段BRKは、ブレーキキャリパCPR、回転部材KTB、摩擦部材MSB、電気モータMTR、駆動手段DRV、減速機GSK、回転・直動変換機構KTH、押し力取得手段FBA、位置検出手段MKA、及び、通電量取得手段IMAにて構成されている。
【0032】
ブレーキアクチュエータBRKには、公知の制動装置と同様に、公知のブレーキキャリパCPR、及び、摩擦部材(例えば、ブレーキパッド)MSBが備えられる。MSBが公知の回転部材(例えば、ブレーキロータ)KTBに押し付けられることによって摩擦力が発生し、車輪WHLに制動トルクが生じる。
【0033】
駆動手段(電気モータMTRの駆動回路)DRVにて、目標通電量(目標値)Imtに基づき電気モータMTRへの通電量(最終的には電流値)が制御される。具体的には、駆動手段DRVには、パワートランジスタ(例えば、MOS−FET)が用いられたブリッジ回路が構成され、目標通電量Imtに基づいてパワートランジスタが駆動され、電気モータMTRの出力が制御される。
【0034】
電気モータMTRの出力(出力トルク)は、減速機(例えば、歯車)GSKを介して回転・直動変換機構KTHに伝達される。そして、KTHによって、回転運動が直線運動に変換されて摩擦部材(ブレーキパッド)MSBが回転部材(ブレーキディスク)KTBに押し付けられる。KTBは車輪WHLに固定されており、MSBとKTBとの摩擦によって、車輪WHLに制動トルクが発生し、調整される。回転・直動変換機構KTHとして、「滑り」によって動力伝達(滑り伝達)を行う滑りネジ(例えば、台形ネジ)、或いは、「転がり」によって動力伝達(転がり伝達)を行うボールネジが用いられ得る。
【0035】
モータ駆動回路DRVには、実際の通電量(例えば、実際に電気モータに流れる電流)Imaを検出する通電量取得手段(例えば、電流センサ)IMAが備えられる。また、電気モータMTRには位置(例えば、回転角)Mkaを検出する位置検出手段(例えば、角度センサ)MKAが備えられる。さらに、摩擦部材MSBが回転部材KTBを実際に押す力(実押し力)Fbaを取得(検出)するために、押し力取得手段(例えば、力センサ)FBAが備えられる。
【0036】
図2では、制動手段BRKとして、所謂、ディスク型制動装置(ディスクブレーキ)の構成が例示されているが、制動手段BRKは、ドラム型制動装置(ドラムブレーキ)であってもよい。ドラムブレーキの場合、摩擦部材MSBはブレーキシューであり、回転部材KTBはブレーキドラムである。同様に、電気モータMTRによってブレーキシューがブレーキドラムを押す力(押し力)が制御される。電気モータMTRとして回転運動にてトルクを発生させるものが示されるが、直線運動にて力を発生させるリニアモータでもあってもよい。
【0037】
<制御手段CTLの全体構成>
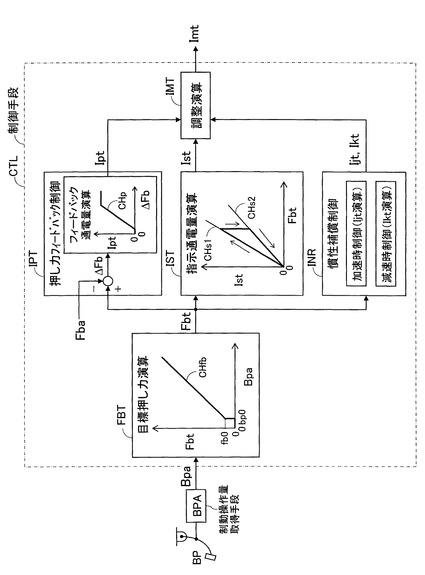
図3に示すように、図1に示した制御手段CTLは、目標押し力演算ブロックFBT、指示通電量演算ブロックIST、押し力フィードバック制御ブロックIPT、慣性補償制御ブロックINR、及び、通電量調整演算ブロックIMTにて構成されている。制御手段CTLは、電子制御ユニットECU内にプログラムされている。
【0038】
制動操作部材BP(例えば、ブレーキペダル)の操作量Bpaが制動操作量取得手段BPAによって取得される。制動操作部材の操作量(制動操作量)Bpaは、運転者による制動操作部材の操作力(例えば、ブレーキ踏力)、及び、変位量(例えば、ブレーキペダルストローク)のうちの少なくとも何れかに基づいて演算される。Bpaにはローパスフィルタ等の演算処理がなされ、ノイズ成分が除去(低減)されている。
【0039】
目標押し力演算ブロックFBTにて、予め設定された目標押し力演算特性(演算マップ)CHfbを用いて、操作量Bpaに基づき目標押し力Fbtが演算される。「押し力」は、制動手段(ブレーキアクチュエータ)BRKにおいて、摩擦部材(例えば、ブレーキパッド)MSBが回転部材(例えば、ブレーキディスク)KTBを押し力である。目標押し力Fbtは、その押し力の目標値である。
【0040】
指示通電量演算ブロックISTにて、予め設定された演算マップCHs1,CHs2を用いて、目標押し力Fbtに基づき指示通電量Istが演算される。指示通電量Istは、制動手段BRKの電気モータMTRを駆動し、目標押し力Fbtを達成するための、電気モータMTRへの通電量の目標値である。演算マップ(指示通電量の演算特性)は、ブレーキアクチュエータのヒステリシスを考慮して、2つの特性CHs1,CHs2で構成される。特性(第1の指示通電量演算特性)CHs1は押し力を増加する場合に対応し、特性(第2の指示通電量演算特性)CHs2は押し力を減少する場合に対応する。そのため、特性CHs2に比較して、特性CHs1は相対的に大きい指示通電量Istを出力するように設定されている。
【0041】
ここで、通電量とは、電気モータMTRの出力トルクを制御するための状態量(変数)である。電気モータMTRは電流に概ね比例するトルクを出力するため、通電量の目標値として電気モータの電流目標値が用いられ得る。また、電気モータMTRへの供給電圧を増加すれば、結果として電流が増加されるため、目標通電量として供給電圧値が用いられ得る。さらに、パルス幅変調(PWM,pulse width modulation)におけるデューティ比によって供給電圧値が調整され得るため、このデューティ比が通電量として用いられ得る。
【0042】
押し力フィードバック制御ブロックIPTにて、目標押し力(目標値)Fbt、及び、実押し力(実際値)Fbaに基づき押し力フィードバック通電量Iptが演算される。指示通電量Istは目標押し力Fbtに相当する値として演算されるが、ブレーキアクチュエータの効率変動により目標押し力Fbtと実際の押し力Fbaとの間に誤差(定常的な誤差)が生じる場合がある。押し力フィードバック通電量Iptは、目標押し力Fbtと実押し力Fbaとの偏差(押し力偏差)ΔFb、及び、演算特性(演算マップ)CHpに基づいて演算され、上記の誤差(定常的な誤差)を減少するように決定される。なお、Fbaは押し力取得手段FBAによって取得される。
【0043】
慣性補償制御ブロックINRにて、BRK(特に、電気モータMTR)の慣性(イナーシャであり、回転運動における慣性モーメント、又は、直線運動における慣性質量)の影響が補償される。慣性補償制御ブロックINRでは、BRKの慣性(慣性モーメント、或いは、慣性質量)の影響を補償するための通電量の目標値Ijt,Iktが演算される。電気モータが停止、或いは、低速で運動している状態から運動(回転運動)が加速される場合に、押し力発生の応答性を向上させることが必要である。この場合に対応する加速時慣性補償通電量Ijtが演算される。Ijtは、慣性補償制御における加速時制御の通電量の目標値である。
【0044】
また、電気モータが運動(回転運動)している状態から減速して停止していく場合に、押し力のオーバシュートを抑制し、収束性を向上することも必要である。この場合に対応する減速時慣性補償通電量Iktが演算される。Iktは、慣性補償制御における減速時制御の通電量の目標値である。ここで、Ijtは電気モータの通電量を増加させる値(Istに加算される正の値)であり、Iktは電気モータの通電量を減少させる値(Istに加算される負の値)である。
【0045】
そして、通電量調整演算ブロックIMTにて、指示通電量Istが、押し力フィードバック通電量Ipt、及び慣性補償通電量Ijt(加速時)、Ikt(減速時)によって調整されて、目標通電量Imtが演算される。具体的には、指示通電量Istに対して、フィードバック通電量Ipt、及び、慣性補償通電量Ijt,Iktが加算されて、その総和が目標通電量Imtとして演算される。目標通電量Imtは、電気モータMTRの出力を制御するための最終的な通電量の目標値である。
【0046】
<慣性補償制御ブロックの第1実施形態の構成>
図4を参照しながら、慣性補償制御ブロックINRの第1実施形態について説明する。その準備として、以下、各種の記号の定義を行う。各種記号に付された「f」は、その元となる状態量(Mkt等)に対して、後述する時定数τmをもつ遅れ要素の演算処理が行われた状態量(fMk等)であり、「処理値」と称呼される。なお、「元となる状態量(元値)」は、遅れ要素による演算処理(遅れ処理)前の値であり、「未処理値」と称呼される。また、各種記号に付された「d」は、元となる状態量(fMk等)が1階微分された値であり、速度に相当する状態量(dfMk等)である。この状態量(「元となる状態量」が1階微分された値)は、「速度値」、或いは、「速度相当値」と称呼される。処理値(fMk等)が1階微分された状態量(dfMk等)は、「処理速度値(処理後速度値)」、或いは、「処理速度相当値(処理後速度相当値)」と称呼される。さらに、各種記号に付された「dd」は、元となる状態量(fMk等)が2階微分された値であり、加速度に相当する状態量(ddfMk等)である。この状態量(「元となる状態量」が2階微分された値)は、「加速度値」、或いは、「加速度相当値」と称呼される。処理値(fMk等)が2階微分された状態量(ddfMk等)は、「処理加速度値(処理後加速度値)」、或いは、「処理加速度相当値(処理後加速度相当値)」と称呼される。
【0047】
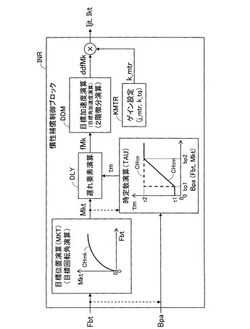
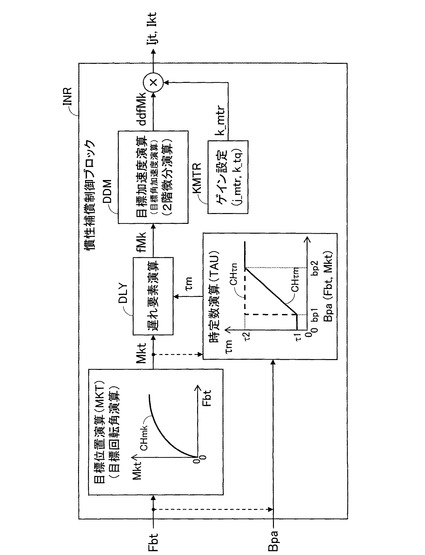
図4に示すように、この慣性補償制御ブロックINRでは、MTR等の慣性(MTRの慣性を含むBRK全体の慣性)に起因する押し力の応答性、及び、収束性を向上する慣性補償制御が実行される。慣性補償制御ブロックINRは、目標位置演算ブロックMKT、時定数演算ブロックTAU、遅れ要素演算ブロックDLY、目標加速度演算ブロックDDM、及び、ゲイン設定ブロックKMTRにて構成される。
【0048】
目標位置演算ブロックMKTにて、目標押し力Fbt、及び、目標押し力演算特性(演算マップ)CHmkに基づいて目標位置(目標回転角)Mktが演算される。目標位置Mktは、電気モータMTRの位置(回転角)の目標値である。演算マップCHmkはブレーキキャリパCPR、及び、摩擦部材(ブレーキパッド)MSBの剛性に相当する特性であり、「上に凸」の非線形な特性として、電子制御ユニットECU内に予め記憶されている。
【0049】
時定数演算ブロックTAUにて、制動操作量Bpa、及び、時定数の演算特性(演算マップ)CHτmに基づいて時定数τmが演算される。ここで、「時定数」とは、後述する「遅れ要素」における応答(入力変化に対する出力変化の状態)の速さを示すパラメータである。操作量Bpaが所定操作量(所定値)bp1未満の場合には、τmは第1の所定時定数(所定値)τ1(≧0)に演算される。Bpaが所定値bp1以上、且つ、所定値bp2未満の場合には、τmはBpaの増加に従い第1の所定時定数τ1から第2の所定時定数τ2まで順次増加するように演算される。Bpaが所定値bp2以上の場合には、τmは第2の所定時定数(所定値)τ2(>τ1)に演算される。
【0050】
或いは、時定数τmは演算特性(演算マップ)CHτnに基づいて演算され得る。演算マップCHτnでは、Bpaが所定値bp1未満の場合には、τmは所定値τ1(≧0)に演算され、Bpaが所定値bp1以上の場合には、τmは所定値τ2(>τ1)に演算され得る。演算特性CHτm,CHτnにおいて、制動操作量Bpaが小さいときには、遅れ要素の演算処理は行われないように、所定値τ1は「0」にされ得る。
【0051】
遅れ要素演算ブロックDLYにて、電気モータMTRの目標位置Mktに基づいて遅れ要素の演算処理後の目標位置(処理値)fMkが演算される。具体的には、ブレーキアクチュエータBRKの応答(即ち、電気モータMTRの応答)に相当する時定数τmを含んだ遅れ要素(例えば、一次遅れ要素)の演算処理が、電気モータの目標位置(元値)Mktに対して実行されて遅れ処理後目標位置(処理値)fMkが演算される。遅れ処理がMktになされることによって、ブレーキアクチュエータBRKの応答が「傾き制限」ではなく、遅れ要素をもつ伝達関数として考慮されて、その応答に対応した目標値であるfMkが演算され得る。即ち、BRKの応答(システムへの入力の時間変化量に対応する出力の時間変化量の有様)が、時定数で表現された遅れ要素を有する伝達関数によって表され、この伝達関数を用いてfMkが演算され得る。ここで、伝達関数はシステム(制御系)への入力に対する出力の関係を表す関数であり、時定数は遅れ要素の応答速さを示すパラメータである。
【0052】
遅れ要素として、n次の遅れ要素(nは「1」以上の整数)が用いられ得る。遅れ要素は、ラプラス変換を用いて表現され、例えば、一次遅れ要素の場合には、伝達関数G(s)は、以下の(1)式で表される。
G(s)=K/(τm・s+1) …(1)
ここで、τmは時定数、Kは定数、sはラプラス演算子である。
【0053】
また、遅れ要素が二次遅れ要素である場合には、遅れ要素演算における伝達関数G(s)は、以下の(2)式で表される。
G(s)=K/{s・(τm・s+1)} …(2)
【0054】
更に、遅れ要素演算において、むだ時間が考慮され得る。むだ時間とは、入力に対して出力が応答し始めるまでに要する時間である。このとき、BRKの応答を表す伝達関数G(s)は、以下の(3)式(一次遅れ及びむだ時間による遅れ要素演算)、又は、(4)式(二次遅れ及びむだ時間による遅れ要素演算)で表現される。
G(s)={K/(τm・s+1)}・e−L・s …(3)
G(s)=〔K/{s・(τm・s+1)}〕・e−L・s …(4)
ここで、Lはむだ時間、eはネイピア数(自然対数の底)である。
【0055】
目標加速度演算ブロックDDMにて、遅れ処理後の目標位置(処理値)fMkに基づいて遅れ処理後の目標加速度(処理加速度値)ddfMkが演算される。ddfMkは、電気モータMTRの加速度(角加速度)の目標値である。具体的には、fMkが2階微分されて、ddfMkが演算される。ddfMkは、電気モータMTRの加速時(停止状態から起動する時)には正符号の値に演算され、MTRの減速時(停止に向かう時)には負符号の値に演算される。
【0056】
ゲイン設定ブロックKMTRには、遅れ処理後の目標加速度(処理加速度値)ddfMkを電気モータの目標通電量に変換するための係数(ゲイン)k_mtrが記憶されている。係数k_mtrは、電気モータの慣性(定数)j_mtrを、電気モータのトルク定数k_tqで除算した値に相当する。そして、ddfMk、及び、k_mtrに基づいて慣性補償制御通電量(目標値)Ijt,Iktが演算される。具体的には、ddfMkにk_mtrが乗算されて、Ijt,Iktが演算される。
【0057】
上述の第1実施形態(図4を参照)では、慣性補償制御ブロックINRにおいて、目標押し力Fbtに基づいて目標位置(未処理値)Mktが演算されて、Mktに遅れ処理(例えば、一次遅れ演算)が行われて遅れ処理後の目標位置(処理値)fMkが演算され、さらに、fMkが2階微分されて目標加速度(処理加速度値)ddfMkが演算され、ddfMkに基づいてIjt,Iktが演算されている。これらの演算処理に代えて、目標押し力(未処理値)Fbtに遅れ処理が行われて遅れ処理後の目標押し力(処理値であり、処理目標押し力)fFbが演算され、fFbが2階微分されて目標押し力加速度(処理加速度値)ddfFbが演算されて、ddfFbに基づいて慣性補償通電量Ijt,Iktが演算され得る。また、Bpaに遅れ処理が行われて遅れ処理後の操作量(処理値)fBpが演算され、fBpが2階微分されて操作加速度(処理加速度値)ddfBpが演算されて、ddfBpに基づいて慣性補償通電量Ijt,Iktが演算され得る。即ち、慣性補償制御ブロックINRでは、制動操作部材BPの操作量Bpaに基づいて演算された未処理値(Bpa,Fbt,Mkt)に遅れ要素の演算が行われて処理値(フィルタ演算後の値)fBp,fFb,fMkが演算され得る。そして、処理値fBp,fFb,fMkが2階微分されて処理加速度値(処理値が2階微分された加速度に相当する値)ddfBp,ddfFb,ddfMkが演算され、処理加速度値ddfBp,ddfFb,ddfMkに基づいて慣性補償通電量Ijt,Iktが演算され得る。
【0058】
電気モータの慣性を補償するトルクは、回転角加速度に比例する。このため、慣性補償が適切に行われるためには、電気モータの回転角加速度(又は、それに相当する値)が適切に演算されることが必要となる。この点を鑑み、上記第1実施形態では、電気モータMTRの応答が、「傾き制限」ではなく、時定数を用いた遅れ要素を有する伝達関数として考慮される。具体的には、Bpaに基づいて演算される未処理値Bpa,Fbt,Mktの何れか1つの元となる状態量に対して、電気モータMTRの応答に相当する時定数τm(ステップ入力に対して、出力が目標値の約63.2%に到達するまでの時間)を持った遅れ要素(例えば、一次遅れ要素)演算が適用されて処理値fBp,fFb,fMkが演算される。そして、処理値fBp,fFb,fMkに基づいて処理加速度値(2階微分された加速度に相当する値)ddfBp,ddfFb,ddfMkが演算されることによって、慣性補償制御の目標値Ijt,Iktが適切に演算され得る。
【0059】
上述の時定数演算ブロックTAUでは、制動操作量Bpa等に基づいて時定数τmが変数として演算されるが、時定数τmが所定値(一定値)として演算され得る。
【0060】
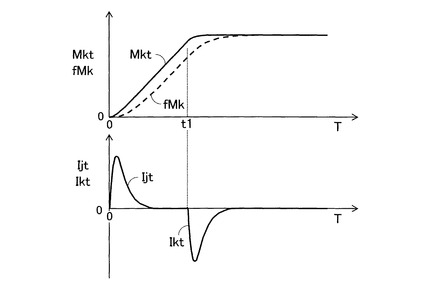
図5は、上記第1実施形態の慣性補償制御ブロックINRの作動を説明するための時間Tに対応する線図(時系列線図)である。電気モータMTR等を含むブレーキアクチュエータBRKが伝達関数(遅れ要素演算)によって表現され、その応答の速さを表す指標として時定数τmが採用される。τmを有する遅れ要素の演算処理(遅れ処理)が目標位置(目標回転角)Mktに対して実行され、処理後目標位置fMkが演算される。処理後目標位置fMkが2階微分されて処理後目標加速度ddfMkが演算され、ddfMkが通電量に変換されてIjt,Iktが演算される。電気モータMTRの応答が「傾き制限」によって表現されるのではなく、時定数τmによる伝達関数に基づいて表現されることによって、電気モータに起動時(時間t0近傍)、或いは、電気モータの停止前(時間t1近傍)において、電気モータMTRへの通電量の目標値が適切に演算される。その結果、確実な慣性補償制御が行われ、電気モータMTRの応答性が確保され、さらに、オーバシュートが抑制され得る。
【0061】
ここで、遅れ要素の演算処理は目標位置Mktについて行われるが、操作量Bpa、目標押し力Fbt、及び、目標位置Mktのうちで少なくとも1つの状態量に対して遅れ要素の演算処理(遅れ処理)がなされ得る。また、時定数演算ブロックTAUにおけるτmの演算には、操作量Bpaが採用され、操作量Bpa、目標押し力Fbt、及び、目標位置Mktのうちで少なくとも1つの元となる状態量(遅れ要素の演算処理前の状態量)が採用され得る。この場合であっても、上述と同様に、演算マップτm,τnが用いられ得る。
【0062】
<慣性補償制御ブロックの第2実施形態の構成>
次に、図6を参照しながら、慣性補償制御ブロックINRの第2実施形態について説明する。図6に示すように、INRの第2実施形態では、操作量Bpaに基づいて電気モータMTRの運動状態が「加速状態」であるか否かが判定されて、加速状態が判定された場合には遅れ要素演算が実行されず、加速状態が判定されない場合に限って遅れ要素演算が実行される。
【0063】
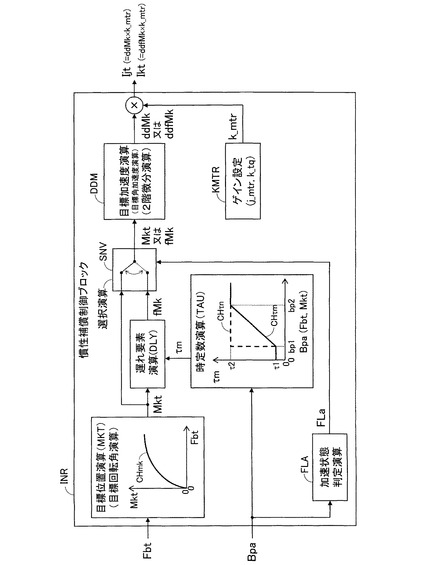
慣性補償制御ブロックINRは、目標位置演算ブロックMKT、時定数演算ブロックTAU、遅れ要素演算ブロックDLY、加速状態判定演算ブロックFLA、選択演算ブロックDDM、目標加速度演算ブロックDDM、及び、ゲイン設定ブロックKMTRにて構成される。目標位置演算ブロックMKT、時定数演算ブロックTAU、遅れ要素演算ブロックDLY、及び、目標加速度演算ブロックDDMは、上述したINR第1実施形態(図4を参照)と同じであるため、説明は省略される。
【0064】
加速状態判定演算ブロックFLAにて、制動操作部材の操作量Bpaに基づいて、その操作に対応する電気モータMTRの運動状態が加速状態であるか否かが判定される。具体的には、操作量Bpaに基づいて制動操作の加速度(未処理加速度値)ddBpが演算されて、ddBpが所定加速度(所定値)ddb0以上である場合(ddBp≧ddb0)に、「加速状態である(加速状態)」と判定される。一方、ddBpが所定加速度(所定値)ddb0未満である場合(ddBp<ddb0)には、「加速状態には無い(非加速状態)」と判定される。加速状態判定演算ブロックFLAからは、判定結果を表す判定フラグFLaが出力される。判定フラグFLaは「1」が「加速状態」を表し、「0」が「非加速状態」を表す。
【0065】
選択手段SNVにて、加速状態の判定フラグFLaに基づいて、遅れ要素演算された目標位置(処理値)fMk、及び、遅れ演算処理されない目標位置(未処理値)Mktのうちの何れか1つが決定(選択)される。選択演算ブロックSNVでは、FLa=1(加速状態)の場合には遅れ要素演算が行われていない目標位置(処理前の目標位置)Mktが選択され、FLa=0(非加速状態)の場合には遅れ要素演算が行われた目標位置(処理後の目標位置)fMkが選択される。
【0066】
目標加速度演算ブロックDDMにて、遅れ要素演算を介さない目標位置(未処理値の1つ)Mkt、又は、遅れ要素演算を介した目標位置(処理値の1つ)fMkに基づいて2階微分演算が行われる。そして、何れか1つの目標位置Mkt,fMkに対応した目標加速度ddMk,ddfMkが演算される。ここで、ddMk,ddfMkは、電気モータMTRの加速度(角加速度)の目標値である。ここで、遅れ要素演算を介さない未処理目標加速度ddMkは、電気モータMTRの加速時(停止状態から起動する時)に演算されるため正符号の値に演算される。一方、遅れ要素演算を介した処理後目標加速度ddfMkは電気モータMTRの減速時(停止に向かう時)に演算されるため負符号の値に演算される。
【0067】
ゲイン設定ブロックKMTRには、目標加速度ddMk(未処理加速度値),ddfMk(処理加速度値)を通電量に変換するための係数(ゲイン)k_mtrが記憶されている。k_mtrは、電気モータの慣性(定数)j_mtrを電気モータのトルク定数k_tqで除算した値に相当する。そして、ddfMk、及び、k_mtrに基づいて慣性補償通電量(目標値)Ijt,Iktが演算される。
【0068】
「加速状態」が判定されているとき(FLa=1)には、遅れ要素演算を介さない目標加速度(未処理値に基づいて演算される目標加速度であり、未処理加速度値)ddMk及びk_mtrに基づいて、Ijt=ddMk×k_mtr にて、加速時の慣性補償通電量Ijtが演算される。即ち、加速時の慣性補償通電量Ijtは、遅れ要素演算を介さない未処理値に基づいて演算される。
【0069】
一方、「加速状態」が判定されていないとき(FLa=0)には、遅れ要素演算を介した目標加速度(処理値に基づいて演算される目標加速度であり、処理加速度値)ddfMk及びk_mtrに基づいて、Ikt=ddfMk×k_mtr にて、減速時の慣性補償通電量Iktが演算される。即ち、減速時の慣性補償通電量Iktは、遅れ要素演算を介した処理値に基づいて演算される。
【0070】
この第2実施形態では、目標押し力Fbtに基づいて演算される目標位置(未処理値)Mkt、及び、Mktが遅れ処理されたfMk(処理値)のうちの何れか一方の状態量に基づいて、目標加速度(ddMk、又は、ddfMk)が演算され慣性補償通電量Ijt,Iktが演算される。これに代えて、Ijt,Iktの演算の元となる状態量(元値)として、操作量Bpa、目標押し力Fbt、及び、目標位置Mktのうちの少なくとも1つの状態量が、元値(元となる状態量)として用いられ得る。
【0071】
目標押し力Fbtが元値として用いられる場合には、処理目標押し力fFbが演算され、判定フラグFLaに基づいて、選択演算ブロックSNVにて未処理目標押し力Fbt、及び、処理目標押し力fFbのうちの何れか一方が選択される。そして、選択された目標押し力(Fbt、又は、fFb)が2階微分されて目標押し力の加速度値(ddFb、又は、ddfFb)が演算され、目標押し力の加速度値に基づいて慣性補償通電量Ijt,Iktが演算される。
【0072】
操作量Bpaが元となる状態量として用いられる場合には、処理操作量fBpが演算され、判定フラグFLaに基づいて、選択演算ブロックSNVにて未処理操作量Bpa、及び、処理操作量fBpのうちの何れか一方が選択される。そして、選択された操作量(Bpa、又は、fBp)が2階微分されて操作量の加速度値(ddBp、又は、ddfBp)が演算され、操作量の加速度値に基づいて慣性補償通電量Ijt,Iktが演算される。
【0073】
以上、この第2実施形態によれば、電気モータMTRの運動状態が加速状態である場合には、遅れ要素演算がバイパスされて加速時の慣性補償通電量Ijtが演算されるため、押し力の応答性が向上され得る。また、電気モータMTRの運動状態が非加速状態である場合には、遅れ要素演算が行われて減速時の慣性補償通電量Iktが演算されるため、押し力のオーバシュートが確実に抑制され、収束性が向上され得る。
【0074】
<慣性補償制御ブロックの第3実施形態の構成>
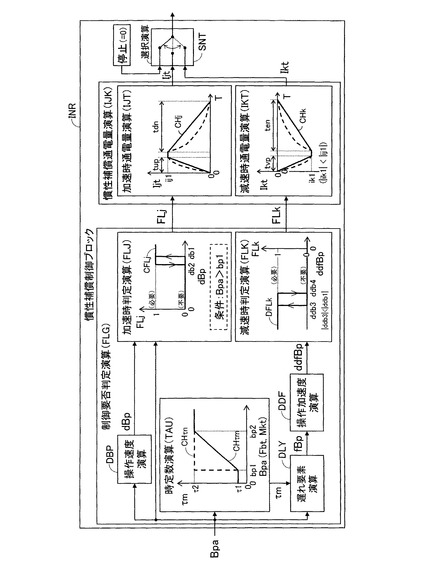
次に、図7を参照しながら、慣性補償制御ブロックINRの第3実施形態について説明する。上記INRの第1、第2実施形態(図4及び図6を参照)では、加速度値(ddfMk等)に基づいてIjt,Iktが演算される。これに代えて、このINRの第3実施形態では、遅れ要素処理後の加速度値ddfBp,ddfFb,ddfMkに基づいて慣性補償制御の要否が判定され、慣性補償制御が必要と判定された場合に、予め設定されたパターンの特性に基づいて慣性補償通電量Ijt,Iktが演算され得る。
【0075】
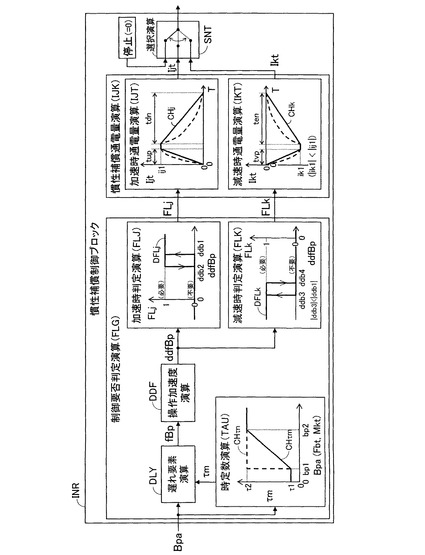
慣性補償制御ブロックINRは、時定数演算ブロックTAU、遅れ要素演算ブロックDLY、操作加速度演算ブロックDDF、慣性補償制御の要否判定演算ブロックFLG、慣性補償制御の通電量演算ブロックIJKにて構成される。
【0076】
時定数演算ブロックTAU、及び、遅れ要素演算ブロックDLYは、上記INRの第1実施形態(図4を参照)の処理と同様であるためその説明は省略する。遅れ要素演算ブロックDLYでは、操作量Bpa、及び、時定数τm(ブレーキアクチュエータBRKによる動力の伝達関数に相当)を考慮した遅れ要素処理に基づいて遅れ要素処理後の操作量(処理値)fBpが演算される。
【0077】
操作加速度演算ブロックDDFにて、処理操作量fBpが2階微分されて処理操作加速度(処理加速度値)ddfBpが演算される。具体的には、遅れ要素処理後の操作量fBpが微分されて操作速度(処理速度値)dfBpが演算され、さらに、dfBpが微分されて操作加速度(処理加速度値)ddfBpが演算される。
【0078】
制御要否判定演算ブロックFLGにて、慣性補償制御の実行が、必要か、否かが判定される。制御要否判定演算ブロックFLGでは、加速時の慣性補償制御の要否が判定された結果を表す要否判定フラグFLj、及び、減速時の慣性補償制御の要否が判定された結果を表す要否判定フラグFLkが演算され、出力される。要否判定フラグFLj,FLkは夫々、「制御の必要状態」が「1」、「制御の不要状態」が「0」で表される。
【0079】
加速時制御の判定結果を表すフラグFLjは、制動操作が行われていないときには「0(制御の不要状態)」にされている。演算マップDFLjに従って、ddfBpが第1の所定加速度(所定値)ddb1(>0)を超過した時点で、要否判定フラグFLjは「0(不要状態)」から「1(必要状態)」に切り替えられる(FLj←1)。その後、ddfBpが所定加速度ddb2(<ddb1)未満となるとFLjは「1」から「0」に変更される。
【0080】
減速時制御の要否判定フラグFLkは、演算マップDFLkに従って、ddfBpが第2の所定加速度(所定値)ddb3(<0)を下回った時点で、「0(不要状態)」から「1(必要状態)」に切り替えられる(FLk←1)。その後、ddfBpが所定加速度(所定値)ddb4(>ddb3,<0)以上となるときに、FLjは「1」から「0」に変更される。
【0081】
慣性補償制御通電量演算ブロックIJKにて、加速時及び減速時の慣性補償通電量(目標値)Ijt,Iktが演算される。
【0082】
加速時の慣性補償制御の要否判定の結果を表す制御フラグFLj、及び、加速時制御量特性(第1の制御量特性であり、第1のパターンに対応)CHjに基づき、加速時慣性補償通電量(第1の慣性補償通電量)Ijtが演算される。加速時制御量特性CHjは、加速時慣性補償制御の必要状態が判定された時点からの経過時間Tに対するIjtの特性(演算マップ)としてECU内に予め記憶されている。CHjでは、時間Tが「0」のときから時間の経過に従い、Ijtが「0」から所定通電量(所定値)ij1にまで急峻に増加され、その後、時間の経過に従いIjtが所定通電量(所定値)ij1から「0」にまで徐々に減少される。具体的には、CHjでは、Ijtが「0」から所定通電量ij1にまで増加されるのに要する時間tupが、Ijtが所定通電量ij1から「0」にまで減少されるのに要する時間tdnよりも短く設定されている。
【0083】
また、図7に破線で示すように、通電量が増加する場合には、Ijtは「上に凸」の特性で、初めに急増され、その後、緩やかに増加する特性として設定され得る。また、通電量が減少する場合には、Ijtは「下に凸」の特性で、初めは急減され、その後、緩やかに減少する特性として設定され得る。そして、要否判定フラグFLjが「0(不要状態)」から「1(必要状態)」に切り替えられた時点をCHjでの経過時間の原点(T=0)とし、その時点からの経過時間Tと加速時制御量特性CHjとに基づき電気モータ加速時の慣性補償通電量(第1の慣性補償通電量)Ijtが決定される。Ijtの演算中に、FLjが「1」から「0」に切り替えられても、演算マップCHjで設定されている継続時間に亘ってIjtは演算され続ける。なお、Ijtは正の値として演算され、Ijtによって電気モータMTRへの通電量が増加されるように調整される。
【0084】
減速時の慣性補償制御の要否判定の結果を表す制御フラグFLk、及び、減速時制御量特性(第2の制御量特性であり、第2のパターンに対応)CHkに基づき減速時慣性補償通電量(第2の慣性補償通電量)Iktが演算される。減速時制御量特性CHkは、減速時慣性補償制御の必要状態が判定された時点からの経過時間Tに対するIktの特性(演算マップ)としてECU内に予め記憶されている。CHkでは、時間Tが「0」のときから時間の経過に従い、Iktが「0」から所定通電量(所定値)ik1にまで急峻に減少され、その後、時間の経過に従いIktが所定通電量(所定値)ik1から「0」にまで徐々に増加される。具体的には、CHkでは、Iktが「0」から所定通電量ik1にまで減少されるのに要する時間tvpが、Iktが所定通電量ik1から「0」にまで増加されるのに要する時間tenよりも短く設定されている。
【0085】
また、図7に破線で示すように、通電量が減少する場合には、Iktは「下に凸」の特性で、初めに急減され、その後、緩やかに減少する特性として設定され得る。また、通電量が増加する場合には、Iktは「上に凸」の特性で、初めは急増され、その後、緩やかに増加する特性として設定され得る。そして、要否判定フラグFLkが「0」から「1」に切り替えられた時点をCHkでの経過時間の原点(T=0)とし、その時点からの経過時間Tと減速時(制御量特性CHkとに基づき電気モータ減速時の慣性補償通電量(第2の慣性補償通電量)Iktが決定される。Iktの演算中に、FLkが「1」から「0」に切り替えられても、演算マップCHkで設定されている継続時間に亘ってIktは演算され続ける。なお、Iktは負の値として演算され、Iktによって電気モータMTRへの通電量が減少されるように調整される。
【0086】
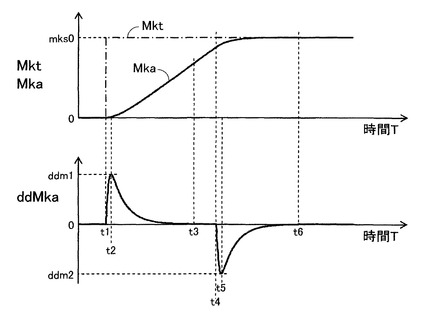
ここで、加速時慣性補償制御の演算特性CHj(第1のパターン)、及び、減速時慣性補償制御の演算特性CHk(第2のパターン)は、制動手段(ブレーキアクチュエータ)BRKの最大応答に基づいて決定される。BRKへの入力(目標通電量)の変化に対して出力(電気モータの変位)が遅れて現れる。BRKの最大応答(BRKが入力に対して応答し得る最大の状態)とは、電気モータMTRへステップ入力を与えた場合のMTRの応答(入力の時間変化量に対応する出力の時間変化量の有様)である。即ち、MTRに所定量の目標通電量Imtが(ゼロから増加方向に)ステップ入力された場合におけるMTRの実際の変位(回転角)Mkaの変化である。図8に示すように、電気モータMTRに対して、(所定の)目標通電量のステップ入力(従って、回転角の目標値Mktが(所定量mks0の)ステップ入力)としてなされた場合、回転角の実際値(出力)Mkaが、目標値(入力)Mktに追い着くように(遅れを伴って目標値に追従するように)変化する。CHj及びCHkは、このMkaの変化に基づいて決定される。
【0087】
装置全体の慣性(特に、電気モータの慣性)を補償するトルクは、電気モータの回転角加速度に比例する。この点を考慮し、慣性補償を適切に行うためには、慣性補償通電量が電気モータの実際の加速度(回転角加速度)ddMkaに基づいて演算される。そのため、MTRの変位(回転角)の実際値Mkaが2階微分されて、加速度(回転角加速度)ddMkaが演算され、ddMkaに基づいてCHj,CHkが決定される。例えば、第1及び第2のパターンCHj、CHkは、ddMkaに係数K(定数)が乗算されることによって設定され得る。
【0088】
CHjにおいて、Ijtが急峻に増加する際の増加勾配(時間に対するIjtの傾き)は、前記ステップ入力の開始時点t1から回転角加速度ddMkaが最大値ddm1となる時点t2までの間におけるddMkaの増加勾配(時間に対して増加するddMkaの傾き)の最大値又は平均値に基づいて決定される。また、Ijtが緩やかに減少する際の減少勾配(時間に対するIjtの傾き)は、ddMkaが最大値ddm1となる時点t2から概ゼロとなる時点t3までの間におけるddMkaの減少勾配(時間に対して減少するddMkaの傾き)の最大値又は平均値に基づいて決定される。
【0089】
また、最大応答(ステップ応答)におけるddMkaに基づいて(時点t1〜t2のddMkaの変化に基づいて)、通電量が増加される場合には、Ijtは「上に凸」の特性で、初めに急増され、その後、緩やかに増加する特性として、CHjが設定され得る。同様に、最大応答におけるddMkaに基づいて(時点t2〜t3のddMkaの変化に基づいて)、通電量が減少される場合には、Ijtは「下に凸」の特性で、初めは急減され、その後、緩やかに減少する特性として、CHjが設定され得る。
【0090】
CHkにおいて、Iktが急峻に減少する際の減少勾配(時間に対するIktの傾き)は、ddMkaがゼロから減少を開始する時点t4から最小値ddm2となる時点t5までの間におけるddMkaの減少勾配(時間に対して減少するddMkaの傾き)の最小値又は平均値に基づいて決定される。また、Iktが緩やかに増加する際の増加勾配(時間に対するIktの傾き)は、ddMkaが最小値ddm2となる時点t5から概ゼロに戻る時点t6までの間におけるddMkaの増加勾配(時間に対して増加するddMkaの傾き)の最大値又は平均値に基づいて決定される。
【0091】
また、最大応答(ステップ応答)におけるddMkaに基づいて(時点t4〜t5のddMkaの変化に基づいて)、通電量が減少される場合には、Iktは「下に凸」の特性で、初めに急減され、その後、緩やかに減少する特性として、CHkが設定され得る。同様に、最大応答におけるddMkaに基づいて(時点t5〜t6のddMkaの変化に基づいて)、通電量が増加される場合には、Iktは「上に凸」の特性で、初めは急増され、その後、緩やかに増加する特性として、CHkが設定され得る。
【0092】
加速時(特に、起動する場合)は電気モータMTRの軸受け等の摩擦に打ち克つトルクを発生させる必要があるが、減速時(停止に向かう場合)はその摩擦がMTRを減速させるように作用する。そのため、加速時の所定通電量(第1の所定通電量)ij1の絶対値は、減速時の所定通電量(第2の所定通電量)ik1の絶対値よりも大きい値に設定される(|ij1|>|ik1|)。
【0093】
<慣性補償制御ブロックの第4実施形態の構成>
次に、図9を参照しながら、慣性補償制御ブロックINRの第4実施形態について説明する。上述したINRの第3実施形態(図7を参照)では、制御要否判定演算ブロックFLGの加速時判定演算ブロックFLJにおいて、処理加速度値(ddfBp等)に基づいて慣性補償制御の要否判定が行われる。これに対し、このINRの第4実施形態では、処理加速度値(ddfBp等)に代えて未処理速度値(dBp等)に基づいて、加速時の慣性補償制御の要否判定が行われる。以下、この第4実施形態が上記第3実施形態(図7を参照)と相違する点のみについて説明する。
【0094】
操作速度演算ブロックDBPにて、制動操作部材の操作量Bpaに基づき、その操作速度(未処理速度値)dBpが演算される。操作速度dBpは、Bpaを微分して演算される。
【0095】
制御要否判定演算ブロックFLGにおける加速時判定演算ブロックFLJにて、制動操作部材BPの操作速度dBpに基づいて慣性補償制御が「必要状態(制御を実行する必要がある状態)」、及び、「不要状態(制御を実行する必要がない状態)」のうちの何れの状態であるかが判定される。判定結果は、要否判定フラグ(制御フラグ)FLjとして出力される。要否判定フラグFLjは「0」が「不要状態」、「1」が「必要状態」に夫々対応している。なお、判定フラグFLjは、制動操作が行われていない場合には、初期値として「0」に設定されている。
【0096】
加速時(例えば、電気モータの回転速度が増加するとき)の慣性補償制御の要否判定は、制動操作部材の操作速度dBpに基づいて行われる。具体的には、演算マップCFLjに従って、dBpが所定操作速度(所定値)db1を超過した時点において、加速時の要否判定フラグFLjが「0(不要状態)」から「1(必要状態)」に切り替えられる(FLj←1)。その後、要否判定フラグFLjはdBpが所定操作速度(所定値)db2未満となる時点で、「1」から「0」に切り替えられる(FLj←0)。
【0097】
慣性補償制御の要否判定には、操作速度dBpに加えて、制動操作部材の操作量Bpaが用いられ得る。この場合、Bpaが所定操作量(所定値)bp1を超過し、且つ、dBpが所定操作速度(所定値)db1を超過した時点において、要否判定フラグFLjが、「0」から「1」に切り替えられる。Bpa>dp1の条件を判定基準に用いるため、dBpにおけるノイズ等の影響が補償され、確実な判定が行われ得る。
【0098】
この第4実施形態では、加速時の判定演算ブロックFLJにおける要否判定にdBpが用いられるが、dBp、dFb、及び、dMkのうちの少なくとも何れか1つが用いられ得る。目標押し力速度dFbは、目標押し力Fbtが微分されて演算される。また、目標速度dMkは、目標位置Mktが微分されて演算される。目標押し力Fbt、及び、目標位置Mktは遅れ要素演算ブロックDLYでの遅れ要素処理が行われていない未処理値である。
【0099】
処理加速度値(ddfBp等)は遅れ要素の演算処理がなされているため、これに基づいて加速時制御の判定が行われると、応答性の面からは不利になる。そこで、この第4実施形態では、応答性が要求される加速時の慣性補償制御では、遅れ処理されていない状態量(未処理値)を用いて制御の要否が判定される。一方、減速時制御においては、処理加速度値(ddfBp等)に基づく制御要否判定によって確実なオーバシュート抑制が達成され得る。
【0100】
<慣性補償制御ブロックの第5実施形態の構成>
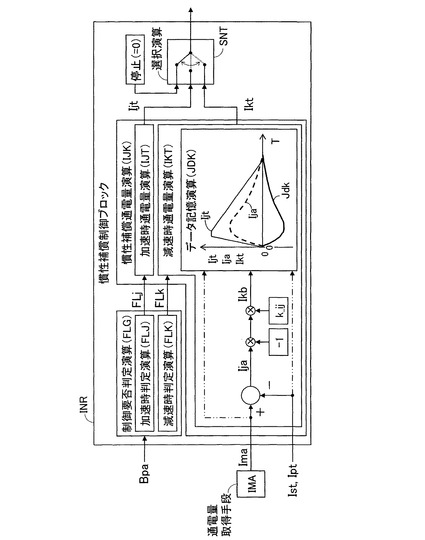
次に、図10を参照しながら、慣性補償制御ブロックINRの第5実施形態について説明する。電気モータMTRの応答性が考慮された値として加速時慣性補償通電量Ijtが出力されたとしても、電源の状態(例えば、電源電圧の低下がある場合等)によっては、電気モータMTRの実際の通電量が目標値と一致するとは限らない。例えば、電気モータMTRの起動時において実際の通電量が不足していた場合に、予め設定された減速時慣性補償通電量Iktが出力されるとブレーキアクチュエータBRKにおいて押し力の不足が生じる場合があり得る。そのため、この第5実施形態では、通電量取得手段(例えば、電流センサ)IMAが取得する実際の通電量(例えば、電流値)Imaに基づいて減速時慣性補償通電量Iktが演算され得る。
【0101】
慣性補償制御ブロックINRは、制御要否判定演算ブロックFLG、慣性補償通電量演算ブロックIJK、及び、選択演算ブロックSNTにて構成される。制御要否判定演算ブロックFLG、及び、選択演算ブロックSNTの構成は、上記第3、第4実施形態(図7及び図9を参照)と同様であるため、以下、慣性補償通電量演算ブロックIJKについてのみ説明する。
【0102】
慣性補償通電量演算ブロックIJKは、加速時通電量演算ブロックIJT、及び、減速時通電量演算ブロックIKTにて構成される。加速時通電量演算ブロックIJTは、第3及び第4の実施形態(図7及び図8)と同様であるため、説明は省略される。
【0103】
減速時通電量演算ブロックIKTにはデータ記憶演算ブロックJDKが備えられ、Ijtが出力されている間に亘って、実通電量Imaに基づく時系列データJdkが記憶される。実際の通電量Imaは、通電量取得手段(例えば、電流センサ)IMAによって、加速時の慣性補償通電量Ijtに対応させて取得される。時系列データJdkは、Ijtに対応した実際の通電量Ijaの時間経過Tに対する特性として、データ記憶演算ブロックJDKに記憶される。そして、時系列データJdkに基づいて減速時慣性補償通電量Iktが演算される。
【0104】
減速時通電量演算ブロックIKTでは、先ず、実際の通電量Imaから、指示通電量Ist、及び、フィードバック通電量Iptが除かれて(減算されて)、加速時の慣性補償通電量(目標値)Ijtに相当する実際の通電量(実際値)Ijaが演算される。即ち、ImaからIstによる成分とIptによる成分が除かれて、Ijtに対応する通電量Ijaが演算される。そして、対応通電量Ijaに「−1」が乗算され(符号が反転されて)、更に、係数k_ijが乗ぜられて、データ記憶演算ブロックJDKに記憶される通電量Ikbが演算される。
【0105】
データ記憶演算ブロックJDKでは、記憶通電量Ikbが、加速時制御の要否判定フラグFLjが「0(不要状態)」から「1(必要状態)」へ遷移した時点(T=0)からの経過時間(即ち、加速時の慣性補償制御の開始からの経過時間)Tと関連付けて、時系列データJdkとして記憶される。そして、実通電量Imaに基づく時系列データJdkが、Iktを演算するための特性(演算マップ)とされる。減速時制御の要否判定フラグFLkが「0(不要状態)」から「1(必要状態)」へ遷移した時点(T=0)からの経過時間T、及び、Jdkに基づいて減速時の慣性補償通電量Iktが演算される。
【0106】
加速時(特に、起動する場合)は電気モータMTRの軸受け等の摩擦に打ち克つトルクを発生させる必要があるが、減速時(停止に向かう場合)はその摩擦がMTRを減速させるように作用する。このため、係数k_ijは「1」未満の値に設定され得る。
【0107】
前述の説明では、演算周期毎に記憶通電量Ikbが演算されるが、経過時間Tに対応したIma、Ist、及び、Iptの値が時系列データとして記憶されて、これらを用いて特性Jdkが演算され得る。即ち、時系列データJdk=(−1)×(k_ij)×{(Imaの時系列データ)−(Istの時系列データ)−(Iptの時系列データ)}の演算に基づいて特性(演算マップ)Jdkが決定され得る。
【0108】
この第3実施形態では、加速時の慣性補償制御が行われた際の実際の通電量Imaに基づいて減速時の慣性補償制御が実行される。このため、電源等の影響によって目標値と実際値との間に誤差が発生したとしても、適切な慣性補償制御が実行され得る。
【0109】
<慣性補償制御ブロックの第6実施形態の構成>
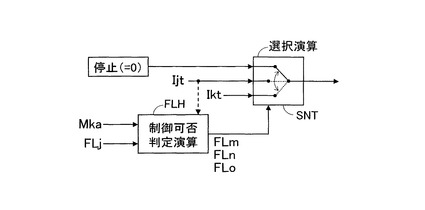
次に、図11を参照しながら、慣性補償制御ブロックINRの第6実施形態について説明する。この第6実施形態では、制御可否判定演算ブロックFLHが設けられ、FLHでの判定結果に基づき、第1〜第5実施形態で説明された選択演算ブロックSNTにおける選択条件(Ijt、Ikt、及び、制御停止の切り替え)が決定され得る。制御可否判定演算ブロックSNTには、第1〜第5実施形態と同様の慣性補償通電量Ijt,Iktが提供される。
【0110】
制御可否判定演算ブロックFLHにて、位置取得手段(例えば、電気モータの回転角センサ)MKAによって取得される実際の位置(実位置であり、例えば、電気モータの回転角)Mkaに基づいて加速時の慣性補償制御の実行(即ち、Ijtの演算)を「許可する(FLm=1)」か、「禁止する(FLm=0)」かの制御実行の可否が判定される。
【0111】
制御可否判定演算ブロックFLHにて、実位置Mkaに基づいて電気モータMTRの速度(回転速度)dMkaが演算される。電気モータMTRの回転速度dMkaが所定速度(所定値)dm1未満の場合には、制御実行が許可され、可否判定フラグFLmとして「1」が出力される。一方、電気モータMTRの回転速度dMkaが所定速度(所定値)dm1以上の場合には、制御実行が禁止され、可否判定フラグFLmとして「0」が出力される。そして、選択演算ブロックSNTでは、可否判定フラグFLmが「0」とされている場合には「0(制御停止)」が選択され、可否判定フラグFLmが「1」とされている場合には加速時の慣性補償通電量Ijtが選択される。
【0112】
慣性補償制御の可否判定は、実位置Mkaに基づき電気モータMTRが停止しているか否かによって判定し得る。電気モータが停止している(回転速度がゼロである)場合には、制御実行が許可され、可否判定フラグFLmとして「1」が出力される。一方、電気モータが運動している(例えば、回転運動を行い、回転速度が発生している)場合には、制御実行が禁止され、可否判定フラグFLmとして「0」が出力される。そして、選択演算ブロックSNTでは、可否判定フラグFLmが「0」とされている場合には「0(制御停止)」が選択され、可否判定フラグFLmが「1」とされている場合には加速時の慣性補償通電量Ijtが選択される。
【0113】
上述の加速時慣性補償制御の必要状態が判定される直前(FLjが「0」から「1」に変更される直前)において、電気モータの回転数が高い場合(dMka≧dm1)、或いは、既に運動(回転)している場合(dMka≠0)には、電気モータ等の慣性を補償する必要性が然程高くないため、慣性補償制御の実行が禁止される。電気モータの回転数が低い場合(dMka<dm1)、或いは、停止している場合(dMka=0)に限って、加速時の慣性補償制御が実行されるため、信頼性の高い慣性補償制御が行われ得る。
【0114】
また、制御可否判定演算ブロックFLHでは、位置取得手段MKAによって取得される実際の位置Mkaに基づいて減速時の慣性補償制御の実行(即ち、Iktの演算)を「許可する(FLn=1)」か、「禁止する(FLn=0)」かの制御実行の可否が判定される。実位置Mkaに基づいて電気モータの速度(回転速度)dMkaが演算される。電気モータMTRの実際の速度dMkaが、所定速度(所定値)dm1以上の場合(dMka≧dm1)には、制御実行が許可され、可否判定フラグFLnとして「1」が出力される。しかし、電気モータの実速度dMkaが所定速度(所定値)dm1未満の場合(dMka<dm1)には、制御実行が禁止され、可否判定フラグFLnとして「0」が出力される。そして、選択演算ブロックSNTでは、可否判定フラグFLnが「0」とされている場合には「0(制御停止)」が選択され、可否判定フラグFLnが「1」とされている場合には減速時の慣性補償通電量Iktが選択される。
【0115】
減速時の慣性補償制御は、電気モータMTRのオーバシュートを抑制する。しかし、電気モータが然程速い運動を行っていない場合には、その必要性が低いため、電気モータの回転速度が低い場合(dMka<dm1の場合)には慣性補償制御が禁止され得る。
【0116】
また、制御可否判定演算ブロックFLHでは、加速時慣性補償制御の通電量(目標値)Ijt、及び、要否判定フラグFLjのうちの少なくとも何れか一方に基づいて、減速時の慣性補償制御の実行(即ち、Iktの演算)を「許可する(FLo=1)」か、「禁止する(FLo=0)」かの制御実行可否が判定され得る。上述した減速時慣性補償制御(減速時制御)の必要状態が判定される前の状態において、加速時の慣性補償制御(加速時制御)が実行されたか否かに基づいて、減速時制御の可否が判定される。加速時制御が実行されていない場合には「禁止」と判定され、可否判定フラグFLoとして「0」が出力される。一方、加速時制御が実行されている場合には「許可」と判定され、可否判定フラグFLoとして「1」が出力される。選択演算ブロックSNTでは、可否判定フラグFLoが「0(禁止状態)」とされている場合には「0(制御停止)」が選択され、可否判定フラグFLoが「1(許可状態)」とされている場合には減速時の慣性補償通電量Iktが選択される。
【0117】
電気モータMTRの加速時に慣性補償制御が必要とされない場合には、その減速時に必要とされる蓋然性が低い。加速時に「必要状態」が判定された場合に限って減速時の制御が実行されるため、慣性補償制御の信頼性が向上され、確実な制御が実行され得る。
【0118】
更に、選択演算ブロックSNTでは、加速時通電量Ijtが「0」にまで低減されていなくても(即ち、加速時の慣性補償制御が終了していなくても)、減速時通電量Iktが出力される場合には、Ijtが「0」とされ、減速時通電量Iktが、選択演算ブロックSNTから出力され得る。IjtよりもIktを優先することにより、制動操作が急ではあるが操作量が小さい場合における電気モータMTRのオーバシュート、及び、押し力の余剰が適切に防止され得る。
【0119】
以下、慣性補償制御ブロックINRにおける慣性補償制御の各実施形態に共通の作用・効果について述べる。慣性補償制御は、慣性をもつ装置の可動部(MTR等)が加速運動、或いは、減速運動を行うために必要な力(トルク)に相当する通電量(Ijt,Ikt)を、目標通電量Imtに対して調整する制御である。具体的には、電気モータが加速する場合には目標通電量を増加することによって補償(修正)し、電気モータが減速する場合には目標通電量を減少することによって補償(修正)する。
【0120】
電気モータの加速時(特に、起動時)の制動トルクの応答性を確保するためには、電気モータの慣性、及び、軸受け等の静摩擦の影響を補償して、電気モータの動き出し(停止状態からの動き始め)を改善することが重要である。上記の各実施形態によれば、制動手段の実際の応答(入力変化に対する出力変化の状態)が、背景技術の欄で説明した「傾き制限」に代えて「時定数(一定値、或いは、Bpaに基づき演算される変数)を用いた遅れ要素(n次遅れの伝達関数、nは「1」以上の整数)」に基づいて表されることによって、電気モータの加速開始直後における慣性補償電流が適正に演算され得る(図5を参照)。従って、電気モータの慣性等の影響が補償され、電気モータが動き出す際の制動トルクの応答性が効率的に向上され得る。
【0121】
同様に、電気モータの減速時(電気モータが運動状態から停止状態に移行する場合)においても、電気モータの減速初期の慣性の補償が重要となる。上記各実施形態によれば、制動手段の実際の応答(入力に対する出力の有様)が、背景技術の欄で説明した「傾き制限」に代えて「時定数(一定値、或いは、Bpaに基づき演算される変数)を用いた遅れ要素(n次遅れの伝達関数、nは「1」以上の整数)」に基づいて表されることによって、電気モータの減速開始直後における慣性補償電流が適正に演算され得る(図5を参照)。従って、電気モータの減速開始直後における電気モータの減速度が増大され、制動トルクのオーバシュートが効率的に抑制され得る。以上、上記構成によれば、電気モータの慣性を含む装置全体の慣性の影響が効率的且つ適正に補償され得る。
【符号の説明】
【0122】
BRK…ブレーキアクチュエータ、ECU…電子制御ユニット、MTR…電気モータ、BPA…制動操作量検出手段、SAA…操舵角検出手段、YRA…ヨーレイト検出手段、GXA…前後加速度検出手段、GYA…横加速度検出手段、VWA…車輪速度検出手段、FBA…押し力検出手段、IMA…通電量検出手段、位置検出手段…MKA
【技術分野】
【0001】
本発明は、車両の制動制御装置に関する。
【背景技術】
【0002】
従来より、電気モータによって制動トルクを発生する車両の制動制御装置が知られている。この種の装置では、通常、運転者による車両の制動操作部材の操作量に基づいて指示電流(目標電流)が演算され、指示電流に基づいて電気モータが制御される。これにより、制動操作部材の操作に応じた制動トルクが車輪に付与される。
【0003】
この種の装置では、電気モータの慣性を含む装置全体の慣性(慣性モーメント、慣性質量)の影響に起因して、特に急制動時(急激に制動トルクが増加するとき)等において、電気モータの回転速度が増加する加速時(例えば、電気モータが起動するとき)における制動トルクの応答遅れ(立上りの遅れ)、並びに、電気モータの回転速度が減少する減速時(例えば、電気モータが停止に向かうとき)における制動トルクのオーバシュートが発生し得る。従って、特に急制動時において、上記慣性の影響を補償すること、即ち、電気モータの加速時における制動トルクの応答性(立上り性能)の向上、並びに、電気モータの減速時における制動トルクのオーバシュートの抑制(収束性の向上)が望まれている。
【0004】
この問題に対処するため、例えば、特許文献1には、以下のことが記載されている。即ち、指示電流と目標モータ回転角との関係を規定するマップに基づいて、演算された指示電流に対応する目標モータ回転角が求められ、この目標モータ回転角を2階微分することにより、目標モータ回転角加速度が求められる。この目標モータ回転角加速度に基づいて、装置全体の慣性の影響を補償するための慣性補償電流が演算される。この場合、慣性補償電流は、電気モータの加速時には正の値に演算され、電気モータの減速時には負の値に演算される。この慣性補償電流が指示電流に加算されて、補償後指示電流(目標電流)が決定される。これにより、電気モータが起動するときには補償後指示電流が指示電流より大きめに演算されて、制動トルクの応答性が向上し得る。電気モータが停止に向かうときには補償後指示電流が指示電流より小さめに演算されて、制動トルクのオーバシュートが抑制され得る。
【0005】
また、特許文献1には、安定した制御を行うため、指示電流が電気モータの能力を超えた場合には、指示電流に「傾き制限」を設けることも記載されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2002−225690号公報
【発明の概要】
【0007】
ところで、上記文献に記載のように、指示電流から演算される目標モータ回転角加速度に基づいて慣性補償電流が演算される場合において、指示電流に傾き制限が設けられると、指示電流に基づいて得られる目標モータ回転角を2階微分して得られる目標モータ回転角加速度が適正に演算され得なくなる。例えば、指示電流が一定の傾き制限値で制限されている場合、指示電流の2階微分値に相当する目標モータ回転角加速度は「ゼロ(0)」に維持される。この結果、上記慣性の影響の適切な(高精度な)補償が困難となる場合がある。
【0008】
以下、このことについて図12を参照しながら説明する。図12に示す例では、時刻t0にて電気モータが起動し、「時刻t0の短期間後の時点」から「本来の指示電流(実線を参照)と傾き制限がなされた指示電流(一点鎖線を参照)とが交わる時刻t1」までの間、指示電流が一定の傾き制限値で制限されている。この場合、時刻t0からの前記短期間だけ電気モータの回転速度が増加し(従って、正の目標モータ回転角加速度が発生し)、時刻t1からの極短期間だけ電気モータの回転速度が減少し(従って、負の目標モータ回転角加速度が発生し)、その他の期間は電気モータの回転速度が一定に維持される(従って、目標モータ回転角加速度がゼロ(0)に維持される)。即ち、図12に示すように、時刻t0からの前記短期間だけ正の慣性補償電流が発生し、時刻t1からの極短期間だけ負の慣性補償電流が発生し、その他の期間は慣性補償電流がゼロ(0)に維持される。
【0009】
このため、電気モータの加速時における制動トルクの応答性が十分に向上され得ず、また、電気モータの減速時における制動トルクのオーバシュートが十分に抑制され得なかった。上記慣性の影響の更なる適正な補償が望まれているところである。
【0010】
本発明は、上記問題に対処するためになされたものであり、その目的は、電気モータによって制動トルクを発生する車両の制動制御装置であって、電気モータの慣性を含む装置全体の慣性の影響を適正に補償し得るものを提供することにある。
【0011】
本発明に係る車両の制動制御装置は、運転者による車両の制動操作部材(BP)の操作量(Bpa)を取得する操作量取得手段(BPA)と、前記車両の車輪(WHL)に対する制動トルクを電気モータ(MTR)によって発生させる制動手段(BRK)と、前記操作量(Bpa)に基づいて目標通電量(Imt)を演算し、前記目標通電量(Imt)に基づいて前記電気モータ(MTR)を制御する制御手段(CTL)とを備える。
【0012】
本発明の特徴は、前記制御手段(CTL)が、前記制動手段(BRK)の応答を表す時定数(τm)を有する遅れ要素(DLY)、及び、前記操作量(Bpa)に基づいて、前記制動手段(BRK)の慣性の影響を補償する慣性補償通電量(Ijt,Ikt)を演算し、前記慣性補償通電量(Ijt,Ikt)に基づいて前記目標通電量(Imt)を演算するように構成されたことにある。
【0013】
電気モータの加速時(特に、起動時)の制動トルクの応答性を確保するためには、電気モータの軸受け等の静摩擦の影響を補償するとともに、装置全体の慣性の影響を補償して電気モータの動き出し(停止状態からの動き始め)を改善することが重要である。上記構成によれば、制動手段の実際の応答が、上述した「傾き制限」に代えて「時定数(遅れ要素の応答の速さを示すパラメータ)を用いた遅れ要素」に基づいて表されることによって、電気モータの加速開始直後における慣性補償電流が適正に演算され得る(後述する図5を参照)。従って、電気モータを含む装置全体の慣性、及び、軸受け等の静摩擦の影響が補償され、電気モータの動き出しの制動トルクの応答性が効率的に向上され得る。
【0014】
同様に、電気モータの減速時(電気モータが運動状態から停止状態に移行する場合)においても、電気モータの減速初期の慣性の補償が重要となる。上記構成によれば、制動手段の実際の応答が、上述した「傾き制限」に代えて「時定数を用いた遅れ要素」に基づいて表されることによって、電気モータの減速開始直後における慣性補償電流が適正に演算され得る(後述する図5を参照)。従って、電気モータの減速開始直後における電気モータの減速度が増大され、制動トルクのオーバシュートが効率的に抑制され得る。以上、上記構成によれば、電気モータの慣性を含む装置全体の慣性の影響が効率的且つ適正に補償され得る。
【0015】
上記制動制御装置においては、前記制御手段(CTL)は、前記遅れ要素(DLY)、及び、前記操作量(Bpa)に基づいて処理値(fBp,fFb,fMk)を演算し、前記処理値(fBp,fFb,fMk)を2階微分して加速度相当値(ddfBp,ddfFb,ddfMk)を演算し、前記加速度相当値(ddfBp,ddfFb,ddfMk)に基づいて前記慣性補償通電量(Ijt,Ikt)を演算するように構成されることが好適である。
【0016】
装置全体の慣性(特に、電気モータの慣性)を補償するトルクは、電気モータの回転角加速度に比例する。この点を考慮すると、慣性補償を適切に行うためには、慣性補償通電量が電気モータの回転角加速度(又は、それに相当する同じ次元の値)に基づいて演算されることが重要となる。上記構成は係る知見に基づく。
【0017】
上記制動制御装置においては、前記操作量(Bpa)が大きいほど、前記時定数(τm)を相対的に大きい値に決定するように構成されることが好ましい。これによれば、操作量が小さい段階、即ち、電気モータの加速開始直後(電気モータの起動時)には時定数が小さい値に設定されるとともに、操作量が大きい段階、即ち、電気モータの減速時には時定数が大きい値に設定される。この結果、電気モータの起動時には制動トルクの応答性が確保され得、電気モータの減速時には慣性補償通電量の演算に使用される前記加速度相当値が適正に演算され得る。
【0018】
上記制動制御装置においては、前記制御手段(CTL)は、前記加速度相当値(ddfBp,ddfFb,ddfMk)が第1の所定加速度(ddb1)を超過する場合に、予め設定された時系列の第1パターン(CHj)に基づいて前記目標通電量(Imt)を増加するための第1の前記慣性補償通電量(Ijt)を演算し、前記加速度相当値(ddfBp,ddfFb,ddfMk)が第2の所定加速度(ddb2)を下回る場合に、予め設定された時系列の第2パターン(CHk)に基づいて前記目標通電量(Imt)を減少するための第2の前記慣性補償通電量(Ikt)を演算するように構成されることが好適である。
【0019】
慣性補償制御の効果を高めるためには、運動における初期の加減速を補償することが重要である。上記構成によれば、電気モータが加減速運動を開始した初期段階の慣性が補償されるように、予め設定された時系列のパターンに基づいて適正な慣性補償通電量が演算され得る。更には、慣性補償制御の開始は加速度相当値に基づいて決定され得る。なお、時系列のパターンは、電気モータの慣性に依存する特性であり、実験等によって求められ得る。
【0020】
上記制動制御装置においては、前記電気モータ(MTR)の実際の通電量(Ima)を取得する通電量取得手段(IMA)を備え、前記制御手段(CTL)が、前記加速度相当値(ddfBp,ddfFb,ddfMk)が第1の所定加速度(ddb1)を超過する場合に、予め設定された時系列の第1パターン(CHj)に基づいて前記目標通電量(Imt)を増加するための第1の前記慣性補償通電量(Ijt)を演算するとともに、前記第1の慣性補償通電量(Ijt)に対応して取得された前記実際の通電量(Ima)に基づいて前記第1パターン(CHj)に対応する時系列データ(Jdk)を取得し、前記加速度相当値(ddfBp,ddfFb,ddfMk)が第2の所定加速度(ddb2)を下回る場合に、前記時系列データ(Jdk)に基づいて前記目標通電量(Imt)を減少するための第2の前記慣性補償通電量(Ikt)を演算するように構成されることが好適である。
【0021】
電源電圧等の状態によっては、目標通電量に対して実際の通電量が不足する場合も考えられ得る。上記構成によれば、電気モータの加速時における実際の通電量に基づいて電気モータの減速時の慣性補償通電量(従って、目標通電量)が決定される。この結果、電源電圧等の状況に応じた適切な慣性補償制御が実行され得る。
【0022】
上記制動制御装置においては、前記制御手段(CTL)は、前記操作量(Bpa)に基づいて、前記制動操作部材(BP)の操作速度が増加する加速状態か否かを判定し、前記加速状態を判定する場合(FLa=1)には前記遅れ要素(DLY)による演算処理を行わず、前記加速状態を判定しない場合(FLa=0)には前記遅れ要素(DLY)による演算処理を行うように構成されることが好ましい。
【0023】
一般に、状態量に対して遅れ要素による演算処理がなされると、応答性については不利になる。上記構成によれば、制動操作が加速状態にあるとき(制動操作部材の操作速度が増加していくとき)、即ち、制動トルクの応答性が要求される度合いが高いときには、遅れ要素による演算処理が禁止されて、制動トルクの応答性が確保され得る。
【図面の簡単な説明】
【0024】
【図1】本発明の実施形態に係る制動制御装置を搭載した車両の概略構成図である。
【図2】図1に示した制動手段(ブレーキアクチュエータ)(Z部)の構成を説明するための図である。
【図3】図1に示した制御手段(ブレーキコントローラ)を説明するための機能ブロック図である。
【図4】図3に示した慣性補償制御ブロックの第1実施形態を説明するための機能ブロック図である。
【図5】遅れ要素による演算処理がなされることによる作用・効果を説明するための図である。
【図6】図3に示した慣性補償制御ブロックの第2実施形態を説明するための機能ブロック図である。
【図7】図3に示した慣性補償制御ブロックの第3実施形態を説明するための機能ブロック図である。
【図8】制動手段(ブレーキアクチュエータ)の最大応答を説明するための図である。
【図9】図3に示した慣性補償制御ブロックの第4実施形態を説明するための機能ブロック図である。
【図10】図3に示した慣性補償制御ブロックの第5実施形態を説明するための機能ブロック図である。
【図11】図3に示した慣性補償制御ブロックの第6実施形態を説明するための機能ブロック図である。
【図12】従来の制動制御装置によって指示電流に傾き制限が設けられる場合における、慣性補償電流の演算結果の一例を示したタイムチャートである。
【発明を実施するための形態】
【0025】
以下、本発明に係る車両の制動制御装置の実施形態について図面を参照しつつ説明する。
【0026】
<本発明に係る車両の制動制御装置を搭載した車両全体の構成>
図1に示すように、この車両には、運転者が車両を減速するために操作する制動操作部材(例えば、ブレーキペダル)BP、各車輪の制動トルクを調整して各車輪に制動力を発生させる制動手段(ブレーキアクチュエータ)BRK、BRKを制御する電子制御ユニットECU、及び、BRK、ECU等に電力を供給する電源としての蓄電池BATが搭載されている。
【0027】
また、この車両には、BPの操作量Bpaを検出する制動操作量取得手段(例えば、ストロークセンサ、踏力センサ)BPA、運転者によるステアリングホイールSWの操作角Saaを検出する操舵角検出手段SAA、車両のヨーレイトYraを検出するヨーレイト検出手段YRA、車両の前後加速度Gxaを検出する前後加速度検出手段GXA、車両の横加速度Gyaを検出する横加速度検出手段GYA、及び、各車輪WHLの回転速度(車輪速度)Vwaを検出する車輪速度検出手段VWAが備えられている。
【0028】
制動手段BRKには、電気モータMTR(図示せず)が備えられ、MTRによって車輪WHLの制動トルクが制御される。また、BRKには、摩擦部材が回転部材を押す力Fbaを検出する押し力検出手段(例えば、軸力センサ)FBA、MTRの通電量(例えば、電流値)Imaを検出する通電量検出手段(例えば、電流センサ)IMA、MTRの位置(例えば、回転角)Mkaを検出する位置検出手段(例えば、回転角センサ)MKAが備えられている。
【0029】
上述した種々の検出手段の検出信号(Bpa等)は、ノイズ除去(低減)フィルタ(例えば、ローパスフィルタ)の処理がなされて、ECUに供給される。ECUでは、本発明に係わる制動制御の演算処理が実行される。即ち、後述する制御手段CTLがECU内にプログラムされ、Bpa等に基づいて電気モータMTRを制御するための目標通電量(例えば、目標電流値、目標デューティ比)Imtが演算される。また、ECUでは、Vwa、Yra等に基づいて、公知のアンチスキッド制御(ABS)、トラクション制御(TCS)、車両安定化制御(ESC)等の演算処理が実行される。
【0030】
<制動手段(ブレーキアクチュエータ)BRKの構成>
本発明に係る制動制御装置では、車輪WHLの制動トルクの発生、及び調整が、電気モータMTRによって行われる。
【0031】
図1のZ部の拡大図である図2に示すように、制動手段BRKは、ブレーキキャリパCPR、回転部材KTB、摩擦部材MSB、電気モータMTR、駆動手段DRV、減速機GSK、回転・直動変換機構KTH、押し力取得手段FBA、位置検出手段MKA、及び、通電量取得手段IMAにて構成されている。
【0032】
ブレーキアクチュエータBRKには、公知の制動装置と同様に、公知のブレーキキャリパCPR、及び、摩擦部材(例えば、ブレーキパッド)MSBが備えられる。MSBが公知の回転部材(例えば、ブレーキロータ)KTBに押し付けられることによって摩擦力が発生し、車輪WHLに制動トルクが生じる。
【0033】
駆動手段(電気モータMTRの駆動回路)DRVにて、目標通電量(目標値)Imtに基づき電気モータMTRへの通電量(最終的には電流値)が制御される。具体的には、駆動手段DRVには、パワートランジスタ(例えば、MOS−FET)が用いられたブリッジ回路が構成され、目標通電量Imtに基づいてパワートランジスタが駆動され、電気モータMTRの出力が制御される。
【0034】
電気モータMTRの出力(出力トルク)は、減速機(例えば、歯車)GSKを介して回転・直動変換機構KTHに伝達される。そして、KTHによって、回転運動が直線運動に変換されて摩擦部材(ブレーキパッド)MSBが回転部材(ブレーキディスク)KTBに押し付けられる。KTBは車輪WHLに固定されており、MSBとKTBとの摩擦によって、車輪WHLに制動トルクが発生し、調整される。回転・直動変換機構KTHとして、「滑り」によって動力伝達(滑り伝達)を行う滑りネジ(例えば、台形ネジ)、或いは、「転がり」によって動力伝達(転がり伝達)を行うボールネジが用いられ得る。
【0035】
モータ駆動回路DRVには、実際の通電量(例えば、実際に電気モータに流れる電流)Imaを検出する通電量取得手段(例えば、電流センサ)IMAが備えられる。また、電気モータMTRには位置(例えば、回転角)Mkaを検出する位置検出手段(例えば、角度センサ)MKAが備えられる。さらに、摩擦部材MSBが回転部材KTBを実際に押す力(実押し力)Fbaを取得(検出)するために、押し力取得手段(例えば、力センサ)FBAが備えられる。
【0036】
図2では、制動手段BRKとして、所謂、ディスク型制動装置(ディスクブレーキ)の構成が例示されているが、制動手段BRKは、ドラム型制動装置(ドラムブレーキ)であってもよい。ドラムブレーキの場合、摩擦部材MSBはブレーキシューであり、回転部材KTBはブレーキドラムである。同様に、電気モータMTRによってブレーキシューがブレーキドラムを押す力(押し力)が制御される。電気モータMTRとして回転運動にてトルクを発生させるものが示されるが、直線運動にて力を発生させるリニアモータでもあってもよい。
【0037】
<制御手段CTLの全体構成>
図3に示すように、図1に示した制御手段CTLは、目標押し力演算ブロックFBT、指示通電量演算ブロックIST、押し力フィードバック制御ブロックIPT、慣性補償制御ブロックINR、及び、通電量調整演算ブロックIMTにて構成されている。制御手段CTLは、電子制御ユニットECU内にプログラムされている。
【0038】
制動操作部材BP(例えば、ブレーキペダル)の操作量Bpaが制動操作量取得手段BPAによって取得される。制動操作部材の操作量(制動操作量)Bpaは、運転者による制動操作部材の操作力(例えば、ブレーキ踏力)、及び、変位量(例えば、ブレーキペダルストローク)のうちの少なくとも何れかに基づいて演算される。Bpaにはローパスフィルタ等の演算処理がなされ、ノイズ成分が除去(低減)されている。
【0039】
目標押し力演算ブロックFBTにて、予め設定された目標押し力演算特性(演算マップ)CHfbを用いて、操作量Bpaに基づき目標押し力Fbtが演算される。「押し力」は、制動手段(ブレーキアクチュエータ)BRKにおいて、摩擦部材(例えば、ブレーキパッド)MSBが回転部材(例えば、ブレーキディスク)KTBを押し力である。目標押し力Fbtは、その押し力の目標値である。
【0040】
指示通電量演算ブロックISTにて、予め設定された演算マップCHs1,CHs2を用いて、目標押し力Fbtに基づき指示通電量Istが演算される。指示通電量Istは、制動手段BRKの電気モータMTRを駆動し、目標押し力Fbtを達成するための、電気モータMTRへの通電量の目標値である。演算マップ(指示通電量の演算特性)は、ブレーキアクチュエータのヒステリシスを考慮して、2つの特性CHs1,CHs2で構成される。特性(第1の指示通電量演算特性)CHs1は押し力を増加する場合に対応し、特性(第2の指示通電量演算特性)CHs2は押し力を減少する場合に対応する。そのため、特性CHs2に比較して、特性CHs1は相対的に大きい指示通電量Istを出力するように設定されている。
【0041】
ここで、通電量とは、電気モータMTRの出力トルクを制御するための状態量(変数)である。電気モータMTRは電流に概ね比例するトルクを出力するため、通電量の目標値として電気モータの電流目標値が用いられ得る。また、電気モータMTRへの供給電圧を増加すれば、結果として電流が増加されるため、目標通電量として供給電圧値が用いられ得る。さらに、パルス幅変調(PWM,pulse width modulation)におけるデューティ比によって供給電圧値が調整され得るため、このデューティ比が通電量として用いられ得る。
【0042】
押し力フィードバック制御ブロックIPTにて、目標押し力(目標値)Fbt、及び、実押し力(実際値)Fbaに基づき押し力フィードバック通電量Iptが演算される。指示通電量Istは目標押し力Fbtに相当する値として演算されるが、ブレーキアクチュエータの効率変動により目標押し力Fbtと実際の押し力Fbaとの間に誤差(定常的な誤差)が生じる場合がある。押し力フィードバック通電量Iptは、目標押し力Fbtと実押し力Fbaとの偏差(押し力偏差)ΔFb、及び、演算特性(演算マップ)CHpに基づいて演算され、上記の誤差(定常的な誤差)を減少するように決定される。なお、Fbaは押し力取得手段FBAによって取得される。
【0043】
慣性補償制御ブロックINRにて、BRK(特に、電気モータMTR)の慣性(イナーシャであり、回転運動における慣性モーメント、又は、直線運動における慣性質量)の影響が補償される。慣性補償制御ブロックINRでは、BRKの慣性(慣性モーメント、或いは、慣性質量)の影響を補償するための通電量の目標値Ijt,Iktが演算される。電気モータが停止、或いは、低速で運動している状態から運動(回転運動)が加速される場合に、押し力発生の応答性を向上させることが必要である。この場合に対応する加速時慣性補償通電量Ijtが演算される。Ijtは、慣性補償制御における加速時制御の通電量の目標値である。
【0044】
また、電気モータが運動(回転運動)している状態から減速して停止していく場合に、押し力のオーバシュートを抑制し、収束性を向上することも必要である。この場合に対応する減速時慣性補償通電量Iktが演算される。Iktは、慣性補償制御における減速時制御の通電量の目標値である。ここで、Ijtは電気モータの通電量を増加させる値(Istに加算される正の値)であり、Iktは電気モータの通電量を減少させる値(Istに加算される負の値)である。
【0045】
そして、通電量調整演算ブロックIMTにて、指示通電量Istが、押し力フィードバック通電量Ipt、及び慣性補償通電量Ijt(加速時)、Ikt(減速時)によって調整されて、目標通電量Imtが演算される。具体的には、指示通電量Istに対して、フィードバック通電量Ipt、及び、慣性補償通電量Ijt,Iktが加算されて、その総和が目標通電量Imtとして演算される。目標通電量Imtは、電気モータMTRの出力を制御するための最終的な通電量の目標値である。
【0046】
<慣性補償制御ブロックの第1実施形態の構成>
図4を参照しながら、慣性補償制御ブロックINRの第1実施形態について説明する。その準備として、以下、各種の記号の定義を行う。各種記号に付された「f」は、その元となる状態量(Mkt等)に対して、後述する時定数τmをもつ遅れ要素の演算処理が行われた状態量(fMk等)であり、「処理値」と称呼される。なお、「元となる状態量(元値)」は、遅れ要素による演算処理(遅れ処理)前の値であり、「未処理値」と称呼される。また、各種記号に付された「d」は、元となる状態量(fMk等)が1階微分された値であり、速度に相当する状態量(dfMk等)である。この状態量(「元となる状態量」が1階微分された値)は、「速度値」、或いは、「速度相当値」と称呼される。処理値(fMk等)が1階微分された状態量(dfMk等)は、「処理速度値(処理後速度値)」、或いは、「処理速度相当値(処理後速度相当値)」と称呼される。さらに、各種記号に付された「dd」は、元となる状態量(fMk等)が2階微分された値であり、加速度に相当する状態量(ddfMk等)である。この状態量(「元となる状態量」が2階微分された値)は、「加速度値」、或いは、「加速度相当値」と称呼される。処理値(fMk等)が2階微分された状態量(ddfMk等)は、「処理加速度値(処理後加速度値)」、或いは、「処理加速度相当値(処理後加速度相当値)」と称呼される。
【0047】
図4に示すように、この慣性補償制御ブロックINRでは、MTR等の慣性(MTRの慣性を含むBRK全体の慣性)に起因する押し力の応答性、及び、収束性を向上する慣性補償制御が実行される。慣性補償制御ブロックINRは、目標位置演算ブロックMKT、時定数演算ブロックTAU、遅れ要素演算ブロックDLY、目標加速度演算ブロックDDM、及び、ゲイン設定ブロックKMTRにて構成される。
【0048】
目標位置演算ブロックMKTにて、目標押し力Fbt、及び、目標押し力演算特性(演算マップ)CHmkに基づいて目標位置(目標回転角)Mktが演算される。目標位置Mktは、電気モータMTRの位置(回転角)の目標値である。演算マップCHmkはブレーキキャリパCPR、及び、摩擦部材(ブレーキパッド)MSBの剛性に相当する特性であり、「上に凸」の非線形な特性として、電子制御ユニットECU内に予め記憶されている。
【0049】
時定数演算ブロックTAUにて、制動操作量Bpa、及び、時定数の演算特性(演算マップ)CHτmに基づいて時定数τmが演算される。ここで、「時定数」とは、後述する「遅れ要素」における応答(入力変化に対する出力変化の状態)の速さを示すパラメータである。操作量Bpaが所定操作量(所定値)bp1未満の場合には、τmは第1の所定時定数(所定値)τ1(≧0)に演算される。Bpaが所定値bp1以上、且つ、所定値bp2未満の場合には、τmはBpaの増加に従い第1の所定時定数τ1から第2の所定時定数τ2まで順次増加するように演算される。Bpaが所定値bp2以上の場合には、τmは第2の所定時定数(所定値)τ2(>τ1)に演算される。
【0050】
或いは、時定数τmは演算特性(演算マップ)CHτnに基づいて演算され得る。演算マップCHτnでは、Bpaが所定値bp1未満の場合には、τmは所定値τ1(≧0)に演算され、Bpaが所定値bp1以上の場合には、τmは所定値τ2(>τ1)に演算され得る。演算特性CHτm,CHτnにおいて、制動操作量Bpaが小さいときには、遅れ要素の演算処理は行われないように、所定値τ1は「0」にされ得る。
【0051】
遅れ要素演算ブロックDLYにて、電気モータMTRの目標位置Mktに基づいて遅れ要素の演算処理後の目標位置(処理値)fMkが演算される。具体的には、ブレーキアクチュエータBRKの応答(即ち、電気モータMTRの応答)に相当する時定数τmを含んだ遅れ要素(例えば、一次遅れ要素)の演算処理が、電気モータの目標位置(元値)Mktに対して実行されて遅れ処理後目標位置(処理値)fMkが演算される。遅れ処理がMktになされることによって、ブレーキアクチュエータBRKの応答が「傾き制限」ではなく、遅れ要素をもつ伝達関数として考慮されて、その応答に対応した目標値であるfMkが演算され得る。即ち、BRKの応答(システムへの入力の時間変化量に対応する出力の時間変化量の有様)が、時定数で表現された遅れ要素を有する伝達関数によって表され、この伝達関数を用いてfMkが演算され得る。ここで、伝達関数はシステム(制御系)への入力に対する出力の関係を表す関数であり、時定数は遅れ要素の応答速さを示すパラメータである。
【0052】
遅れ要素として、n次の遅れ要素(nは「1」以上の整数)が用いられ得る。遅れ要素は、ラプラス変換を用いて表現され、例えば、一次遅れ要素の場合には、伝達関数G(s)は、以下の(1)式で表される。
G(s)=K/(τm・s+1) …(1)
ここで、τmは時定数、Kは定数、sはラプラス演算子である。
【0053】
また、遅れ要素が二次遅れ要素である場合には、遅れ要素演算における伝達関数G(s)は、以下の(2)式で表される。
G(s)=K/{s・(τm・s+1)} …(2)
【0054】
更に、遅れ要素演算において、むだ時間が考慮され得る。むだ時間とは、入力に対して出力が応答し始めるまでに要する時間である。このとき、BRKの応答を表す伝達関数G(s)は、以下の(3)式(一次遅れ及びむだ時間による遅れ要素演算)、又は、(4)式(二次遅れ及びむだ時間による遅れ要素演算)で表現される。
G(s)={K/(τm・s+1)}・e−L・s …(3)
G(s)=〔K/{s・(τm・s+1)}〕・e−L・s …(4)
ここで、Lはむだ時間、eはネイピア数(自然対数の底)である。
【0055】
目標加速度演算ブロックDDMにて、遅れ処理後の目標位置(処理値)fMkに基づいて遅れ処理後の目標加速度(処理加速度値)ddfMkが演算される。ddfMkは、電気モータMTRの加速度(角加速度)の目標値である。具体的には、fMkが2階微分されて、ddfMkが演算される。ddfMkは、電気モータMTRの加速時(停止状態から起動する時)には正符号の値に演算され、MTRの減速時(停止に向かう時)には負符号の値に演算される。
【0056】
ゲイン設定ブロックKMTRには、遅れ処理後の目標加速度(処理加速度値)ddfMkを電気モータの目標通電量に変換するための係数(ゲイン)k_mtrが記憶されている。係数k_mtrは、電気モータの慣性(定数)j_mtrを、電気モータのトルク定数k_tqで除算した値に相当する。そして、ddfMk、及び、k_mtrに基づいて慣性補償制御通電量(目標値)Ijt,Iktが演算される。具体的には、ddfMkにk_mtrが乗算されて、Ijt,Iktが演算される。
【0057】
上述の第1実施形態(図4を参照)では、慣性補償制御ブロックINRにおいて、目標押し力Fbtに基づいて目標位置(未処理値)Mktが演算されて、Mktに遅れ処理(例えば、一次遅れ演算)が行われて遅れ処理後の目標位置(処理値)fMkが演算され、さらに、fMkが2階微分されて目標加速度(処理加速度値)ddfMkが演算され、ddfMkに基づいてIjt,Iktが演算されている。これらの演算処理に代えて、目標押し力(未処理値)Fbtに遅れ処理が行われて遅れ処理後の目標押し力(処理値であり、処理目標押し力)fFbが演算され、fFbが2階微分されて目標押し力加速度(処理加速度値)ddfFbが演算されて、ddfFbに基づいて慣性補償通電量Ijt,Iktが演算され得る。また、Bpaに遅れ処理が行われて遅れ処理後の操作量(処理値)fBpが演算され、fBpが2階微分されて操作加速度(処理加速度値)ddfBpが演算されて、ddfBpに基づいて慣性補償通電量Ijt,Iktが演算され得る。即ち、慣性補償制御ブロックINRでは、制動操作部材BPの操作量Bpaに基づいて演算された未処理値(Bpa,Fbt,Mkt)に遅れ要素の演算が行われて処理値(フィルタ演算後の値)fBp,fFb,fMkが演算され得る。そして、処理値fBp,fFb,fMkが2階微分されて処理加速度値(処理値が2階微分された加速度に相当する値)ddfBp,ddfFb,ddfMkが演算され、処理加速度値ddfBp,ddfFb,ddfMkに基づいて慣性補償通電量Ijt,Iktが演算され得る。
【0058】
電気モータの慣性を補償するトルクは、回転角加速度に比例する。このため、慣性補償が適切に行われるためには、電気モータの回転角加速度(又は、それに相当する値)が適切に演算されることが必要となる。この点を鑑み、上記第1実施形態では、電気モータMTRの応答が、「傾き制限」ではなく、時定数を用いた遅れ要素を有する伝達関数として考慮される。具体的には、Bpaに基づいて演算される未処理値Bpa,Fbt,Mktの何れか1つの元となる状態量に対して、電気モータMTRの応答に相当する時定数τm(ステップ入力に対して、出力が目標値の約63.2%に到達するまでの時間)を持った遅れ要素(例えば、一次遅れ要素)演算が適用されて処理値fBp,fFb,fMkが演算される。そして、処理値fBp,fFb,fMkに基づいて処理加速度値(2階微分された加速度に相当する値)ddfBp,ddfFb,ddfMkが演算されることによって、慣性補償制御の目標値Ijt,Iktが適切に演算され得る。
【0059】
上述の時定数演算ブロックTAUでは、制動操作量Bpa等に基づいて時定数τmが変数として演算されるが、時定数τmが所定値(一定値)として演算され得る。
【0060】
図5は、上記第1実施形態の慣性補償制御ブロックINRの作動を説明するための時間Tに対応する線図(時系列線図)である。電気モータMTR等を含むブレーキアクチュエータBRKが伝達関数(遅れ要素演算)によって表現され、その応答の速さを表す指標として時定数τmが採用される。τmを有する遅れ要素の演算処理(遅れ処理)が目標位置(目標回転角)Mktに対して実行され、処理後目標位置fMkが演算される。処理後目標位置fMkが2階微分されて処理後目標加速度ddfMkが演算され、ddfMkが通電量に変換されてIjt,Iktが演算される。電気モータMTRの応答が「傾き制限」によって表現されるのではなく、時定数τmによる伝達関数に基づいて表現されることによって、電気モータに起動時(時間t0近傍)、或いは、電気モータの停止前(時間t1近傍)において、電気モータMTRへの通電量の目標値が適切に演算される。その結果、確実な慣性補償制御が行われ、電気モータMTRの応答性が確保され、さらに、オーバシュートが抑制され得る。
【0061】
ここで、遅れ要素の演算処理は目標位置Mktについて行われるが、操作量Bpa、目標押し力Fbt、及び、目標位置Mktのうちで少なくとも1つの状態量に対して遅れ要素の演算処理(遅れ処理)がなされ得る。また、時定数演算ブロックTAUにおけるτmの演算には、操作量Bpaが採用され、操作量Bpa、目標押し力Fbt、及び、目標位置Mktのうちで少なくとも1つの元となる状態量(遅れ要素の演算処理前の状態量)が採用され得る。この場合であっても、上述と同様に、演算マップτm,τnが用いられ得る。
【0062】
<慣性補償制御ブロックの第2実施形態の構成>
次に、図6を参照しながら、慣性補償制御ブロックINRの第2実施形態について説明する。図6に示すように、INRの第2実施形態では、操作量Bpaに基づいて電気モータMTRの運動状態が「加速状態」であるか否かが判定されて、加速状態が判定された場合には遅れ要素演算が実行されず、加速状態が判定されない場合に限って遅れ要素演算が実行される。
【0063】
慣性補償制御ブロックINRは、目標位置演算ブロックMKT、時定数演算ブロックTAU、遅れ要素演算ブロックDLY、加速状態判定演算ブロックFLA、選択演算ブロックDDM、目標加速度演算ブロックDDM、及び、ゲイン設定ブロックKMTRにて構成される。目標位置演算ブロックMKT、時定数演算ブロックTAU、遅れ要素演算ブロックDLY、及び、目標加速度演算ブロックDDMは、上述したINR第1実施形態(図4を参照)と同じであるため、説明は省略される。
【0064】
加速状態判定演算ブロックFLAにて、制動操作部材の操作量Bpaに基づいて、その操作に対応する電気モータMTRの運動状態が加速状態であるか否かが判定される。具体的には、操作量Bpaに基づいて制動操作の加速度(未処理加速度値)ddBpが演算されて、ddBpが所定加速度(所定値)ddb0以上である場合(ddBp≧ddb0)に、「加速状態である(加速状態)」と判定される。一方、ddBpが所定加速度(所定値)ddb0未満である場合(ddBp<ddb0)には、「加速状態には無い(非加速状態)」と判定される。加速状態判定演算ブロックFLAからは、判定結果を表す判定フラグFLaが出力される。判定フラグFLaは「1」が「加速状態」を表し、「0」が「非加速状態」を表す。
【0065】
選択手段SNVにて、加速状態の判定フラグFLaに基づいて、遅れ要素演算された目標位置(処理値)fMk、及び、遅れ演算処理されない目標位置(未処理値)Mktのうちの何れか1つが決定(選択)される。選択演算ブロックSNVでは、FLa=1(加速状態)の場合には遅れ要素演算が行われていない目標位置(処理前の目標位置)Mktが選択され、FLa=0(非加速状態)の場合には遅れ要素演算が行われた目標位置(処理後の目標位置)fMkが選択される。
【0066】
目標加速度演算ブロックDDMにて、遅れ要素演算を介さない目標位置(未処理値の1つ)Mkt、又は、遅れ要素演算を介した目標位置(処理値の1つ)fMkに基づいて2階微分演算が行われる。そして、何れか1つの目標位置Mkt,fMkに対応した目標加速度ddMk,ddfMkが演算される。ここで、ddMk,ddfMkは、電気モータMTRの加速度(角加速度)の目標値である。ここで、遅れ要素演算を介さない未処理目標加速度ddMkは、電気モータMTRの加速時(停止状態から起動する時)に演算されるため正符号の値に演算される。一方、遅れ要素演算を介した処理後目標加速度ddfMkは電気モータMTRの減速時(停止に向かう時)に演算されるため負符号の値に演算される。
【0067】
ゲイン設定ブロックKMTRには、目標加速度ddMk(未処理加速度値),ddfMk(処理加速度値)を通電量に変換するための係数(ゲイン)k_mtrが記憶されている。k_mtrは、電気モータの慣性(定数)j_mtrを電気モータのトルク定数k_tqで除算した値に相当する。そして、ddfMk、及び、k_mtrに基づいて慣性補償通電量(目標値)Ijt,Iktが演算される。
【0068】
「加速状態」が判定されているとき(FLa=1)には、遅れ要素演算を介さない目標加速度(未処理値に基づいて演算される目標加速度であり、未処理加速度値)ddMk及びk_mtrに基づいて、Ijt=ddMk×k_mtr にて、加速時の慣性補償通電量Ijtが演算される。即ち、加速時の慣性補償通電量Ijtは、遅れ要素演算を介さない未処理値に基づいて演算される。
【0069】
一方、「加速状態」が判定されていないとき(FLa=0)には、遅れ要素演算を介した目標加速度(処理値に基づいて演算される目標加速度であり、処理加速度値)ddfMk及びk_mtrに基づいて、Ikt=ddfMk×k_mtr にて、減速時の慣性補償通電量Iktが演算される。即ち、減速時の慣性補償通電量Iktは、遅れ要素演算を介した処理値に基づいて演算される。
【0070】
この第2実施形態では、目標押し力Fbtに基づいて演算される目標位置(未処理値)Mkt、及び、Mktが遅れ処理されたfMk(処理値)のうちの何れか一方の状態量に基づいて、目標加速度(ddMk、又は、ddfMk)が演算され慣性補償通電量Ijt,Iktが演算される。これに代えて、Ijt,Iktの演算の元となる状態量(元値)として、操作量Bpa、目標押し力Fbt、及び、目標位置Mktのうちの少なくとも1つの状態量が、元値(元となる状態量)として用いられ得る。
【0071】
目標押し力Fbtが元値として用いられる場合には、処理目標押し力fFbが演算され、判定フラグFLaに基づいて、選択演算ブロックSNVにて未処理目標押し力Fbt、及び、処理目標押し力fFbのうちの何れか一方が選択される。そして、選択された目標押し力(Fbt、又は、fFb)が2階微分されて目標押し力の加速度値(ddFb、又は、ddfFb)が演算され、目標押し力の加速度値に基づいて慣性補償通電量Ijt,Iktが演算される。
【0072】
操作量Bpaが元となる状態量として用いられる場合には、処理操作量fBpが演算され、判定フラグFLaに基づいて、選択演算ブロックSNVにて未処理操作量Bpa、及び、処理操作量fBpのうちの何れか一方が選択される。そして、選択された操作量(Bpa、又は、fBp)が2階微分されて操作量の加速度値(ddBp、又は、ddfBp)が演算され、操作量の加速度値に基づいて慣性補償通電量Ijt,Iktが演算される。
【0073】
以上、この第2実施形態によれば、電気モータMTRの運動状態が加速状態である場合には、遅れ要素演算がバイパスされて加速時の慣性補償通電量Ijtが演算されるため、押し力の応答性が向上され得る。また、電気モータMTRの運動状態が非加速状態である場合には、遅れ要素演算が行われて減速時の慣性補償通電量Iktが演算されるため、押し力のオーバシュートが確実に抑制され、収束性が向上され得る。
【0074】
<慣性補償制御ブロックの第3実施形態の構成>
次に、図7を参照しながら、慣性補償制御ブロックINRの第3実施形態について説明する。上記INRの第1、第2実施形態(図4及び図6を参照)では、加速度値(ddfMk等)に基づいてIjt,Iktが演算される。これに代えて、このINRの第3実施形態では、遅れ要素処理後の加速度値ddfBp,ddfFb,ddfMkに基づいて慣性補償制御の要否が判定され、慣性補償制御が必要と判定された場合に、予め設定されたパターンの特性に基づいて慣性補償通電量Ijt,Iktが演算され得る。
【0075】
慣性補償制御ブロックINRは、時定数演算ブロックTAU、遅れ要素演算ブロックDLY、操作加速度演算ブロックDDF、慣性補償制御の要否判定演算ブロックFLG、慣性補償制御の通電量演算ブロックIJKにて構成される。
【0076】
時定数演算ブロックTAU、及び、遅れ要素演算ブロックDLYは、上記INRの第1実施形態(図4を参照)の処理と同様であるためその説明は省略する。遅れ要素演算ブロックDLYでは、操作量Bpa、及び、時定数τm(ブレーキアクチュエータBRKによる動力の伝達関数に相当)を考慮した遅れ要素処理に基づいて遅れ要素処理後の操作量(処理値)fBpが演算される。
【0077】
操作加速度演算ブロックDDFにて、処理操作量fBpが2階微分されて処理操作加速度(処理加速度値)ddfBpが演算される。具体的には、遅れ要素処理後の操作量fBpが微分されて操作速度(処理速度値)dfBpが演算され、さらに、dfBpが微分されて操作加速度(処理加速度値)ddfBpが演算される。
【0078】
制御要否判定演算ブロックFLGにて、慣性補償制御の実行が、必要か、否かが判定される。制御要否判定演算ブロックFLGでは、加速時の慣性補償制御の要否が判定された結果を表す要否判定フラグFLj、及び、減速時の慣性補償制御の要否が判定された結果を表す要否判定フラグFLkが演算され、出力される。要否判定フラグFLj,FLkは夫々、「制御の必要状態」が「1」、「制御の不要状態」が「0」で表される。
【0079】
加速時制御の判定結果を表すフラグFLjは、制動操作が行われていないときには「0(制御の不要状態)」にされている。演算マップDFLjに従って、ddfBpが第1の所定加速度(所定値)ddb1(>0)を超過した時点で、要否判定フラグFLjは「0(不要状態)」から「1(必要状態)」に切り替えられる(FLj←1)。その後、ddfBpが所定加速度ddb2(<ddb1)未満となるとFLjは「1」から「0」に変更される。
【0080】
減速時制御の要否判定フラグFLkは、演算マップDFLkに従って、ddfBpが第2の所定加速度(所定値)ddb3(<0)を下回った時点で、「0(不要状態)」から「1(必要状態)」に切り替えられる(FLk←1)。その後、ddfBpが所定加速度(所定値)ddb4(>ddb3,<0)以上となるときに、FLjは「1」から「0」に変更される。
【0081】
慣性補償制御通電量演算ブロックIJKにて、加速時及び減速時の慣性補償通電量(目標値)Ijt,Iktが演算される。
【0082】
加速時の慣性補償制御の要否判定の結果を表す制御フラグFLj、及び、加速時制御量特性(第1の制御量特性であり、第1のパターンに対応)CHjに基づき、加速時慣性補償通電量(第1の慣性補償通電量)Ijtが演算される。加速時制御量特性CHjは、加速時慣性補償制御の必要状態が判定された時点からの経過時間Tに対するIjtの特性(演算マップ)としてECU内に予め記憶されている。CHjでは、時間Tが「0」のときから時間の経過に従い、Ijtが「0」から所定通電量(所定値)ij1にまで急峻に増加され、その後、時間の経過に従いIjtが所定通電量(所定値)ij1から「0」にまで徐々に減少される。具体的には、CHjでは、Ijtが「0」から所定通電量ij1にまで増加されるのに要する時間tupが、Ijtが所定通電量ij1から「0」にまで減少されるのに要する時間tdnよりも短く設定されている。
【0083】
また、図7に破線で示すように、通電量が増加する場合には、Ijtは「上に凸」の特性で、初めに急増され、その後、緩やかに増加する特性として設定され得る。また、通電量が減少する場合には、Ijtは「下に凸」の特性で、初めは急減され、その後、緩やかに減少する特性として設定され得る。そして、要否判定フラグFLjが「0(不要状態)」から「1(必要状態)」に切り替えられた時点をCHjでの経過時間の原点(T=0)とし、その時点からの経過時間Tと加速時制御量特性CHjとに基づき電気モータ加速時の慣性補償通電量(第1の慣性補償通電量)Ijtが決定される。Ijtの演算中に、FLjが「1」から「0」に切り替えられても、演算マップCHjで設定されている継続時間に亘ってIjtは演算され続ける。なお、Ijtは正の値として演算され、Ijtによって電気モータMTRへの通電量が増加されるように調整される。
【0084】
減速時の慣性補償制御の要否判定の結果を表す制御フラグFLk、及び、減速時制御量特性(第2の制御量特性であり、第2のパターンに対応)CHkに基づき減速時慣性補償通電量(第2の慣性補償通電量)Iktが演算される。減速時制御量特性CHkは、減速時慣性補償制御の必要状態が判定された時点からの経過時間Tに対するIktの特性(演算マップ)としてECU内に予め記憶されている。CHkでは、時間Tが「0」のときから時間の経過に従い、Iktが「0」から所定通電量(所定値)ik1にまで急峻に減少され、その後、時間の経過に従いIktが所定通電量(所定値)ik1から「0」にまで徐々に増加される。具体的には、CHkでは、Iktが「0」から所定通電量ik1にまで減少されるのに要する時間tvpが、Iktが所定通電量ik1から「0」にまで増加されるのに要する時間tenよりも短く設定されている。
【0085】
また、図7に破線で示すように、通電量が減少する場合には、Iktは「下に凸」の特性で、初めに急減され、その後、緩やかに減少する特性として設定され得る。また、通電量が増加する場合には、Iktは「上に凸」の特性で、初めは急増され、その後、緩やかに増加する特性として設定され得る。そして、要否判定フラグFLkが「0」から「1」に切り替えられた時点をCHkでの経過時間の原点(T=0)とし、その時点からの経過時間Tと減速時(制御量特性CHkとに基づき電気モータ減速時の慣性補償通電量(第2の慣性補償通電量)Iktが決定される。Iktの演算中に、FLkが「1」から「0」に切り替えられても、演算マップCHkで設定されている継続時間に亘ってIktは演算され続ける。なお、Iktは負の値として演算され、Iktによって電気モータMTRへの通電量が減少されるように調整される。
【0086】
ここで、加速時慣性補償制御の演算特性CHj(第1のパターン)、及び、減速時慣性補償制御の演算特性CHk(第2のパターン)は、制動手段(ブレーキアクチュエータ)BRKの最大応答に基づいて決定される。BRKへの入力(目標通電量)の変化に対して出力(電気モータの変位)が遅れて現れる。BRKの最大応答(BRKが入力に対して応答し得る最大の状態)とは、電気モータMTRへステップ入力を与えた場合のMTRの応答(入力の時間変化量に対応する出力の時間変化量の有様)である。即ち、MTRに所定量の目標通電量Imtが(ゼロから増加方向に)ステップ入力された場合におけるMTRの実際の変位(回転角)Mkaの変化である。図8に示すように、電気モータMTRに対して、(所定の)目標通電量のステップ入力(従って、回転角の目標値Mktが(所定量mks0の)ステップ入力)としてなされた場合、回転角の実際値(出力)Mkaが、目標値(入力)Mktに追い着くように(遅れを伴って目標値に追従するように)変化する。CHj及びCHkは、このMkaの変化に基づいて決定される。
【0087】
装置全体の慣性(特に、電気モータの慣性)を補償するトルクは、電気モータの回転角加速度に比例する。この点を考慮し、慣性補償を適切に行うためには、慣性補償通電量が電気モータの実際の加速度(回転角加速度)ddMkaに基づいて演算される。そのため、MTRの変位(回転角)の実際値Mkaが2階微分されて、加速度(回転角加速度)ddMkaが演算され、ddMkaに基づいてCHj,CHkが決定される。例えば、第1及び第2のパターンCHj、CHkは、ddMkaに係数K(定数)が乗算されることによって設定され得る。
【0088】
CHjにおいて、Ijtが急峻に増加する際の増加勾配(時間に対するIjtの傾き)は、前記ステップ入力の開始時点t1から回転角加速度ddMkaが最大値ddm1となる時点t2までの間におけるddMkaの増加勾配(時間に対して増加するddMkaの傾き)の最大値又は平均値に基づいて決定される。また、Ijtが緩やかに減少する際の減少勾配(時間に対するIjtの傾き)は、ddMkaが最大値ddm1となる時点t2から概ゼロとなる時点t3までの間におけるddMkaの減少勾配(時間に対して減少するddMkaの傾き)の最大値又は平均値に基づいて決定される。
【0089】
また、最大応答(ステップ応答)におけるddMkaに基づいて(時点t1〜t2のddMkaの変化に基づいて)、通電量が増加される場合には、Ijtは「上に凸」の特性で、初めに急増され、その後、緩やかに増加する特性として、CHjが設定され得る。同様に、最大応答におけるddMkaに基づいて(時点t2〜t3のddMkaの変化に基づいて)、通電量が減少される場合には、Ijtは「下に凸」の特性で、初めは急減され、その後、緩やかに減少する特性として、CHjが設定され得る。
【0090】
CHkにおいて、Iktが急峻に減少する際の減少勾配(時間に対するIktの傾き)は、ddMkaがゼロから減少を開始する時点t4から最小値ddm2となる時点t5までの間におけるddMkaの減少勾配(時間に対して減少するddMkaの傾き)の最小値又は平均値に基づいて決定される。また、Iktが緩やかに増加する際の増加勾配(時間に対するIktの傾き)は、ddMkaが最小値ddm2となる時点t5から概ゼロに戻る時点t6までの間におけるddMkaの増加勾配(時間に対して増加するddMkaの傾き)の最大値又は平均値に基づいて決定される。
【0091】
また、最大応答(ステップ応答)におけるddMkaに基づいて(時点t4〜t5のddMkaの変化に基づいて)、通電量が減少される場合には、Iktは「下に凸」の特性で、初めに急減され、その後、緩やかに減少する特性として、CHkが設定され得る。同様に、最大応答におけるddMkaに基づいて(時点t5〜t6のddMkaの変化に基づいて)、通電量が増加される場合には、Iktは「上に凸」の特性で、初めは急増され、その後、緩やかに増加する特性として、CHkが設定され得る。
【0092】
加速時(特に、起動する場合)は電気モータMTRの軸受け等の摩擦に打ち克つトルクを発生させる必要があるが、減速時(停止に向かう場合)はその摩擦がMTRを減速させるように作用する。そのため、加速時の所定通電量(第1の所定通電量)ij1の絶対値は、減速時の所定通電量(第2の所定通電量)ik1の絶対値よりも大きい値に設定される(|ij1|>|ik1|)。
【0093】
<慣性補償制御ブロックの第4実施形態の構成>
次に、図9を参照しながら、慣性補償制御ブロックINRの第4実施形態について説明する。上述したINRの第3実施形態(図7を参照)では、制御要否判定演算ブロックFLGの加速時判定演算ブロックFLJにおいて、処理加速度値(ddfBp等)に基づいて慣性補償制御の要否判定が行われる。これに対し、このINRの第4実施形態では、処理加速度値(ddfBp等)に代えて未処理速度値(dBp等)に基づいて、加速時の慣性補償制御の要否判定が行われる。以下、この第4実施形態が上記第3実施形態(図7を参照)と相違する点のみについて説明する。
【0094】
操作速度演算ブロックDBPにて、制動操作部材の操作量Bpaに基づき、その操作速度(未処理速度値)dBpが演算される。操作速度dBpは、Bpaを微分して演算される。
【0095】
制御要否判定演算ブロックFLGにおける加速時判定演算ブロックFLJにて、制動操作部材BPの操作速度dBpに基づいて慣性補償制御が「必要状態(制御を実行する必要がある状態)」、及び、「不要状態(制御を実行する必要がない状態)」のうちの何れの状態であるかが判定される。判定結果は、要否判定フラグ(制御フラグ)FLjとして出力される。要否判定フラグFLjは「0」が「不要状態」、「1」が「必要状態」に夫々対応している。なお、判定フラグFLjは、制動操作が行われていない場合には、初期値として「0」に設定されている。
【0096】
加速時(例えば、電気モータの回転速度が増加するとき)の慣性補償制御の要否判定は、制動操作部材の操作速度dBpに基づいて行われる。具体的には、演算マップCFLjに従って、dBpが所定操作速度(所定値)db1を超過した時点において、加速時の要否判定フラグFLjが「0(不要状態)」から「1(必要状態)」に切り替えられる(FLj←1)。その後、要否判定フラグFLjはdBpが所定操作速度(所定値)db2未満となる時点で、「1」から「0」に切り替えられる(FLj←0)。
【0097】
慣性補償制御の要否判定には、操作速度dBpに加えて、制動操作部材の操作量Bpaが用いられ得る。この場合、Bpaが所定操作量(所定値)bp1を超過し、且つ、dBpが所定操作速度(所定値)db1を超過した時点において、要否判定フラグFLjが、「0」から「1」に切り替えられる。Bpa>dp1の条件を判定基準に用いるため、dBpにおけるノイズ等の影響が補償され、確実な判定が行われ得る。
【0098】
この第4実施形態では、加速時の判定演算ブロックFLJにおける要否判定にdBpが用いられるが、dBp、dFb、及び、dMkのうちの少なくとも何れか1つが用いられ得る。目標押し力速度dFbは、目標押し力Fbtが微分されて演算される。また、目標速度dMkは、目標位置Mktが微分されて演算される。目標押し力Fbt、及び、目標位置Mktは遅れ要素演算ブロックDLYでの遅れ要素処理が行われていない未処理値である。
【0099】
処理加速度値(ddfBp等)は遅れ要素の演算処理がなされているため、これに基づいて加速時制御の判定が行われると、応答性の面からは不利になる。そこで、この第4実施形態では、応答性が要求される加速時の慣性補償制御では、遅れ処理されていない状態量(未処理値)を用いて制御の要否が判定される。一方、減速時制御においては、処理加速度値(ddfBp等)に基づく制御要否判定によって確実なオーバシュート抑制が達成され得る。
【0100】
<慣性補償制御ブロックの第5実施形態の構成>
次に、図10を参照しながら、慣性補償制御ブロックINRの第5実施形態について説明する。電気モータMTRの応答性が考慮された値として加速時慣性補償通電量Ijtが出力されたとしても、電源の状態(例えば、電源電圧の低下がある場合等)によっては、電気モータMTRの実際の通電量が目標値と一致するとは限らない。例えば、電気モータMTRの起動時において実際の通電量が不足していた場合に、予め設定された減速時慣性補償通電量Iktが出力されるとブレーキアクチュエータBRKにおいて押し力の不足が生じる場合があり得る。そのため、この第5実施形態では、通電量取得手段(例えば、電流センサ)IMAが取得する実際の通電量(例えば、電流値)Imaに基づいて減速時慣性補償通電量Iktが演算され得る。
【0101】
慣性補償制御ブロックINRは、制御要否判定演算ブロックFLG、慣性補償通電量演算ブロックIJK、及び、選択演算ブロックSNTにて構成される。制御要否判定演算ブロックFLG、及び、選択演算ブロックSNTの構成は、上記第3、第4実施形態(図7及び図9を参照)と同様であるため、以下、慣性補償通電量演算ブロックIJKについてのみ説明する。
【0102】
慣性補償通電量演算ブロックIJKは、加速時通電量演算ブロックIJT、及び、減速時通電量演算ブロックIKTにて構成される。加速時通電量演算ブロックIJTは、第3及び第4の実施形態(図7及び図8)と同様であるため、説明は省略される。
【0103】
減速時通電量演算ブロックIKTにはデータ記憶演算ブロックJDKが備えられ、Ijtが出力されている間に亘って、実通電量Imaに基づく時系列データJdkが記憶される。実際の通電量Imaは、通電量取得手段(例えば、電流センサ)IMAによって、加速時の慣性補償通電量Ijtに対応させて取得される。時系列データJdkは、Ijtに対応した実際の通電量Ijaの時間経過Tに対する特性として、データ記憶演算ブロックJDKに記憶される。そして、時系列データJdkに基づいて減速時慣性補償通電量Iktが演算される。
【0104】
減速時通電量演算ブロックIKTでは、先ず、実際の通電量Imaから、指示通電量Ist、及び、フィードバック通電量Iptが除かれて(減算されて)、加速時の慣性補償通電量(目標値)Ijtに相当する実際の通電量(実際値)Ijaが演算される。即ち、ImaからIstによる成分とIptによる成分が除かれて、Ijtに対応する通電量Ijaが演算される。そして、対応通電量Ijaに「−1」が乗算され(符号が反転されて)、更に、係数k_ijが乗ぜられて、データ記憶演算ブロックJDKに記憶される通電量Ikbが演算される。
【0105】
データ記憶演算ブロックJDKでは、記憶通電量Ikbが、加速時制御の要否判定フラグFLjが「0(不要状態)」から「1(必要状態)」へ遷移した時点(T=0)からの経過時間(即ち、加速時の慣性補償制御の開始からの経過時間)Tと関連付けて、時系列データJdkとして記憶される。そして、実通電量Imaに基づく時系列データJdkが、Iktを演算するための特性(演算マップ)とされる。減速時制御の要否判定フラグFLkが「0(不要状態)」から「1(必要状態)」へ遷移した時点(T=0)からの経過時間T、及び、Jdkに基づいて減速時の慣性補償通電量Iktが演算される。
【0106】
加速時(特に、起動する場合)は電気モータMTRの軸受け等の摩擦に打ち克つトルクを発生させる必要があるが、減速時(停止に向かう場合)はその摩擦がMTRを減速させるように作用する。このため、係数k_ijは「1」未満の値に設定され得る。
【0107】
前述の説明では、演算周期毎に記憶通電量Ikbが演算されるが、経過時間Tに対応したIma、Ist、及び、Iptの値が時系列データとして記憶されて、これらを用いて特性Jdkが演算され得る。即ち、時系列データJdk=(−1)×(k_ij)×{(Imaの時系列データ)−(Istの時系列データ)−(Iptの時系列データ)}の演算に基づいて特性(演算マップ)Jdkが決定され得る。
【0108】
この第3実施形態では、加速時の慣性補償制御が行われた際の実際の通電量Imaに基づいて減速時の慣性補償制御が実行される。このため、電源等の影響によって目標値と実際値との間に誤差が発生したとしても、適切な慣性補償制御が実行され得る。
【0109】
<慣性補償制御ブロックの第6実施形態の構成>
次に、図11を参照しながら、慣性補償制御ブロックINRの第6実施形態について説明する。この第6実施形態では、制御可否判定演算ブロックFLHが設けられ、FLHでの判定結果に基づき、第1〜第5実施形態で説明された選択演算ブロックSNTにおける選択条件(Ijt、Ikt、及び、制御停止の切り替え)が決定され得る。制御可否判定演算ブロックSNTには、第1〜第5実施形態と同様の慣性補償通電量Ijt,Iktが提供される。
【0110】
制御可否判定演算ブロックFLHにて、位置取得手段(例えば、電気モータの回転角センサ)MKAによって取得される実際の位置(実位置であり、例えば、電気モータの回転角)Mkaに基づいて加速時の慣性補償制御の実行(即ち、Ijtの演算)を「許可する(FLm=1)」か、「禁止する(FLm=0)」かの制御実行の可否が判定される。
【0111】
制御可否判定演算ブロックFLHにて、実位置Mkaに基づいて電気モータMTRの速度(回転速度)dMkaが演算される。電気モータMTRの回転速度dMkaが所定速度(所定値)dm1未満の場合には、制御実行が許可され、可否判定フラグFLmとして「1」が出力される。一方、電気モータMTRの回転速度dMkaが所定速度(所定値)dm1以上の場合には、制御実行が禁止され、可否判定フラグFLmとして「0」が出力される。そして、選択演算ブロックSNTでは、可否判定フラグFLmが「0」とされている場合には「0(制御停止)」が選択され、可否判定フラグFLmが「1」とされている場合には加速時の慣性補償通電量Ijtが選択される。
【0112】
慣性補償制御の可否判定は、実位置Mkaに基づき電気モータMTRが停止しているか否かによって判定し得る。電気モータが停止している(回転速度がゼロである)場合には、制御実行が許可され、可否判定フラグFLmとして「1」が出力される。一方、電気モータが運動している(例えば、回転運動を行い、回転速度が発生している)場合には、制御実行が禁止され、可否判定フラグFLmとして「0」が出力される。そして、選択演算ブロックSNTでは、可否判定フラグFLmが「0」とされている場合には「0(制御停止)」が選択され、可否判定フラグFLmが「1」とされている場合には加速時の慣性補償通電量Ijtが選択される。
【0113】
上述の加速時慣性補償制御の必要状態が判定される直前(FLjが「0」から「1」に変更される直前)において、電気モータの回転数が高い場合(dMka≧dm1)、或いは、既に運動(回転)している場合(dMka≠0)には、電気モータ等の慣性を補償する必要性が然程高くないため、慣性補償制御の実行が禁止される。電気モータの回転数が低い場合(dMka<dm1)、或いは、停止している場合(dMka=0)に限って、加速時の慣性補償制御が実行されるため、信頼性の高い慣性補償制御が行われ得る。
【0114】
また、制御可否判定演算ブロックFLHでは、位置取得手段MKAによって取得される実際の位置Mkaに基づいて減速時の慣性補償制御の実行(即ち、Iktの演算)を「許可する(FLn=1)」か、「禁止する(FLn=0)」かの制御実行の可否が判定される。実位置Mkaに基づいて電気モータの速度(回転速度)dMkaが演算される。電気モータMTRの実際の速度dMkaが、所定速度(所定値)dm1以上の場合(dMka≧dm1)には、制御実行が許可され、可否判定フラグFLnとして「1」が出力される。しかし、電気モータの実速度dMkaが所定速度(所定値)dm1未満の場合(dMka<dm1)には、制御実行が禁止され、可否判定フラグFLnとして「0」が出力される。そして、選択演算ブロックSNTでは、可否判定フラグFLnが「0」とされている場合には「0(制御停止)」が選択され、可否判定フラグFLnが「1」とされている場合には減速時の慣性補償通電量Iktが選択される。
【0115】
減速時の慣性補償制御は、電気モータMTRのオーバシュートを抑制する。しかし、電気モータが然程速い運動を行っていない場合には、その必要性が低いため、電気モータの回転速度が低い場合(dMka<dm1の場合)には慣性補償制御が禁止され得る。
【0116】
また、制御可否判定演算ブロックFLHでは、加速時慣性補償制御の通電量(目標値)Ijt、及び、要否判定フラグFLjのうちの少なくとも何れか一方に基づいて、減速時の慣性補償制御の実行(即ち、Iktの演算)を「許可する(FLo=1)」か、「禁止する(FLo=0)」かの制御実行可否が判定され得る。上述した減速時慣性補償制御(減速時制御)の必要状態が判定される前の状態において、加速時の慣性補償制御(加速時制御)が実行されたか否かに基づいて、減速時制御の可否が判定される。加速時制御が実行されていない場合には「禁止」と判定され、可否判定フラグFLoとして「0」が出力される。一方、加速時制御が実行されている場合には「許可」と判定され、可否判定フラグFLoとして「1」が出力される。選択演算ブロックSNTでは、可否判定フラグFLoが「0(禁止状態)」とされている場合には「0(制御停止)」が選択され、可否判定フラグFLoが「1(許可状態)」とされている場合には減速時の慣性補償通電量Iktが選択される。
【0117】
電気モータMTRの加速時に慣性補償制御が必要とされない場合には、その減速時に必要とされる蓋然性が低い。加速時に「必要状態」が判定された場合に限って減速時の制御が実行されるため、慣性補償制御の信頼性が向上され、確実な制御が実行され得る。
【0118】
更に、選択演算ブロックSNTでは、加速時通電量Ijtが「0」にまで低減されていなくても(即ち、加速時の慣性補償制御が終了していなくても)、減速時通電量Iktが出力される場合には、Ijtが「0」とされ、減速時通電量Iktが、選択演算ブロックSNTから出力され得る。IjtよりもIktを優先することにより、制動操作が急ではあるが操作量が小さい場合における電気モータMTRのオーバシュート、及び、押し力の余剰が適切に防止され得る。
【0119】
以下、慣性補償制御ブロックINRにおける慣性補償制御の各実施形態に共通の作用・効果について述べる。慣性補償制御は、慣性をもつ装置の可動部(MTR等)が加速運動、或いは、減速運動を行うために必要な力(トルク)に相当する通電量(Ijt,Ikt)を、目標通電量Imtに対して調整する制御である。具体的には、電気モータが加速する場合には目標通電量を増加することによって補償(修正)し、電気モータが減速する場合には目標通電量を減少することによって補償(修正)する。
【0120】
電気モータの加速時(特に、起動時)の制動トルクの応答性を確保するためには、電気モータの慣性、及び、軸受け等の静摩擦の影響を補償して、電気モータの動き出し(停止状態からの動き始め)を改善することが重要である。上記の各実施形態によれば、制動手段の実際の応答(入力変化に対する出力変化の状態)が、背景技術の欄で説明した「傾き制限」に代えて「時定数(一定値、或いは、Bpaに基づき演算される変数)を用いた遅れ要素(n次遅れの伝達関数、nは「1」以上の整数)」に基づいて表されることによって、電気モータの加速開始直後における慣性補償電流が適正に演算され得る(図5を参照)。従って、電気モータの慣性等の影響が補償され、電気モータが動き出す際の制動トルクの応答性が効率的に向上され得る。
【0121】
同様に、電気モータの減速時(電気モータが運動状態から停止状態に移行する場合)においても、電気モータの減速初期の慣性の補償が重要となる。上記各実施形態によれば、制動手段の実際の応答(入力に対する出力の有様)が、背景技術の欄で説明した「傾き制限」に代えて「時定数(一定値、或いは、Bpaに基づき演算される変数)を用いた遅れ要素(n次遅れの伝達関数、nは「1」以上の整数)」に基づいて表されることによって、電気モータの減速開始直後における慣性補償電流が適正に演算され得る(図5を参照)。従って、電気モータの減速開始直後における電気モータの減速度が増大され、制動トルクのオーバシュートが効率的に抑制され得る。以上、上記構成によれば、電気モータの慣性を含む装置全体の慣性の影響が効率的且つ適正に補償され得る。
【符号の説明】
【0122】
BRK…ブレーキアクチュエータ、ECU…電子制御ユニット、MTR…電気モータ、BPA…制動操作量検出手段、SAA…操舵角検出手段、YRA…ヨーレイト検出手段、GXA…前後加速度検出手段、GYA…横加速度検出手段、VWA…車輪速度検出手段、FBA…押し力検出手段、IMA…通電量検出手段、位置検出手段…MKA
【特許請求の範囲】
【請求項1】
運転者による車両の制動操作部材の操作量を取得する操作量取得手段と、
前記車両の車輪に対する制動トルクを電気モータによって発生させる制動手段と、
前記操作量に基づいて目標通電量を演算し、前記目標通電量に基づいて前記電気モータを制御する制御手段と、
を備えた車両の制動制御装置において、
前記制御手段は、
前記制動手段の応答を表す時定数を有する遅れ要素、及び、前記操作量に基づいて、前記制動手段の慣性の影響を補償する慣性補償通電量を演算し、
前記慣性補償通電量に基づいて前記目標通電量を演算するように構成された、車両の制動制御装置。
【請求項2】
請求項1に記載の車両の制動制御装置において、
前記制御手段は、
前記操作量が大きいほど、前記時定数を相対的に大きい値に決定するように構成された、車両の制動制御装置。
【請求項3】
請求項1又は請求項2に記載の車両の制動制御装置において、
前記制御手段は、
前記遅れ要素、及び、前記操作量に基づいて処理値を演算し、
前記処理値を2階微分して加速度相当値を演算し、
前記加速度相当値に基づいて前記慣性補償通電量を演算するように構成された、車両の制動制御装置。
【請求項4】
請求項3に記載の車両の制動制御装置において、
前記制御手段は、
前記加速度相当値が第1の所定加速度を超過する場合に、予め設定された時系列の第1パターンに基づいて前記目標通電量を増加するための第1の前記慣性補償通電量を演算し、
前記加速度相当値が第2の所定加速度を下回る場合に、予め設定された時系列の第2パターンに基づいて前記目標通電量を減少するための第2の前記慣性補償通電量を演算するように構成された、車両の制動制御装置。
【請求項5】
請求項3又は請求項4に記載の車両の制動制御装置であって、
前記電気モータの実際の通電量を取得する通電量取得手段を備え、
前記制御手段は、
前記加速度相当値が第1の所定加速度を超過する場合に、予め設定された時系列の第1パターンに基づいて前記目標通電量を増加するための第1の前記慣性補償通電量を演算するとともに、前記第1の慣性補償通電量に対応して取得された前記実際の通電量に基づいて前記第1パターンに対応する時系列データを取得し、
前記加速度相当値が第2の所定加速度を下回る場合に、前記時系列データに基づいて前記目標通電量を減少するための第2の前記慣性補償通電量を演算するように構成された、車両の制動制御装置。
【請求項6】
請求項1乃至請求項5の何れか一項に記載の車両の制動制御装置において、
前記制御手段は、
前記操作量に基づいて、前記制動操作部材の操作速度が増加する加速状態か否かを判定し、
前記加速状態を判定する場合には前記遅れ要素による演算処理を行わず、前記加速状態を判定しない場合には前記遅れ要素による演算処理を行うように構成された、車両の制動制御装置。
【請求項1】
運転者による車両の制動操作部材の操作量を取得する操作量取得手段と、
前記車両の車輪に対する制動トルクを電気モータによって発生させる制動手段と、
前記操作量に基づいて目標通電量を演算し、前記目標通電量に基づいて前記電気モータを制御する制御手段と、
を備えた車両の制動制御装置において、
前記制御手段は、
前記制動手段の応答を表す時定数を有する遅れ要素、及び、前記操作量に基づいて、前記制動手段の慣性の影響を補償する慣性補償通電量を演算し、
前記慣性補償通電量に基づいて前記目標通電量を演算するように構成された、車両の制動制御装置。
【請求項2】
請求項1に記載の車両の制動制御装置において、
前記制御手段は、
前記操作量が大きいほど、前記時定数を相対的に大きい値に決定するように構成された、車両の制動制御装置。
【請求項3】
請求項1又は請求項2に記載の車両の制動制御装置において、
前記制御手段は、
前記遅れ要素、及び、前記操作量に基づいて処理値を演算し、
前記処理値を2階微分して加速度相当値を演算し、
前記加速度相当値に基づいて前記慣性補償通電量を演算するように構成された、車両の制動制御装置。
【請求項4】
請求項3に記載の車両の制動制御装置において、
前記制御手段は、
前記加速度相当値が第1の所定加速度を超過する場合に、予め設定された時系列の第1パターンに基づいて前記目標通電量を増加するための第1の前記慣性補償通電量を演算し、
前記加速度相当値が第2の所定加速度を下回る場合に、予め設定された時系列の第2パターンに基づいて前記目標通電量を減少するための第2の前記慣性補償通電量を演算するように構成された、車両の制動制御装置。
【請求項5】
請求項3又は請求項4に記載の車両の制動制御装置であって、
前記電気モータの実際の通電量を取得する通電量取得手段を備え、
前記制御手段は、
前記加速度相当値が第1の所定加速度を超過する場合に、予め設定された時系列の第1パターンに基づいて前記目標通電量を増加するための第1の前記慣性補償通電量を演算するとともに、前記第1の慣性補償通電量に対応して取得された前記実際の通電量に基づいて前記第1パターンに対応する時系列データを取得し、
前記加速度相当値が第2の所定加速度を下回る場合に、前記時系列データに基づいて前記目標通電量を減少するための第2の前記慣性補償通電量を演算するように構成された、車両の制動制御装置。
【請求項6】
請求項1乃至請求項5の何れか一項に記載の車両の制動制御装置において、
前記制御手段は、
前記操作量に基づいて、前記制動操作部材の操作速度が増加する加速状態か否かを判定し、
前記加速状態を判定する場合には前記遅れ要素による演算処理を行わず、前記加速状態を判定しない場合には前記遅れ要素による演算処理を行うように構成された、車両の制動制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−112262(P2013−112262A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−261924(P2011−261924)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]