
車両の安全運転管理システム
【課題】運転者の日常の運転状態や、危険な運転状態に陥りやすい運転状況などを分析し、統計的に把握して、管理、教育を行うことを可能とする車両の安全運転管理システムを提供すること。
【解決手段】車間センサ11と、速度計12と、GPS受信機13と、車載カメラ14とを備え、記憶装置9から道路情報を取得するように構成され、これらの手段により得られる情報は、これらの情報の相互の関係に基づいて車両の運転状態を分析する分析手段である情報処理装置1に入力される。それらの情報の相互の関係に基づいて、その計測および撮影時の運転状態が危険状態か否かを分別判定し、その結果を出力する。上記判定結果をその都度出力すること、任意の時間間隔、任意の距離間隔の走行状態の危険度を分別して出力すること、それらの走行状態を積算などの統計的な処理をして出力することなどが可能である。
【解決手段】車間センサ11と、速度計12と、GPS受信機13と、車載カメラ14とを備え、記憶装置9から道路情報を取得するように構成され、これらの手段により得られる情報は、これらの情報の相互の関係に基づいて車両の運転状態を分析する分析手段である情報処理装置1に入力される。それらの情報の相互の関係に基づいて、その計測および撮影時の運転状態が危険状態か否かを分別判定し、その結果を出力する。上記判定結果をその都度出力すること、任意の時間間隔、任意の距離間隔の走行状態の危険度を分別して出力すること、それらの走行状態を積算などの統計的な処理をして出力することなどが可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の運転者の運行結果の分析に基づいて、運転者に対する管理、教育を行うための車両の安全運転管理システムに関する。
【背景技術】
【0002】
従来、車両の運転者の運行結果により、運転者に対する安全運転指導や安全運転支援を行うことが可能なシステムとしては、特許文献1および2に記載されたシステムがある。
【0003】
特許文献1に記載のシステムは、車両事故の事故原因の解析と、事故の再発予防を主目的としており、このため、事故の発生状況を詳細に再現することを可能にし、その再現情報に基づいて事故原因を解析し、事故の再発予防に寄与することができる運行状態記録装置および運行管理システムを提供するものである。このシステムの具体的な機能としては、運転中の車両の基本的な運行状況を常に記録する第1の記録モードを、所定の判定条件が成立したときに、詳細な運行状況を記録する第2の記録モードへと切り替え、事故の発生の危険性が高まった運行時にのみ詳細な情報を記録するものである。例えば、第1の記録モードは、走行速度、車間距離、周辺監視結果、エンジン回転速度、ブレーキ踏み圧力などのうち少なくとも1つの情報を記録するものであり、第2の記録モードは前記情報のうち第1の記録モードよりも多い複数の情報を記録し、かつ、サンプリング周期も第1の記録モードよりも短い周期としている。記録モードを切り替える判定条件は、危険検出手段を設けて、その危険検出手段が上記情報により危険と判定したとき、例えば、過度の速度オーバーや、急ブレーキ、急ハンドル、蛇行走行時などである。また、危険時の運転者への警告手段や外部への通報手段も含んでいる。
【0004】
特許文献2に記載のシステムは、各種センサを必要としない簡単な装置構成で運転者の傾向を解析し、安全運転を支援することが可能な運転システムの提供を目的としている。このシステムの特徴としては、主として、自車の周囲の少なくとも一部を動画像として撮影する撮影手段と、その動画像の解析手段と、その解析結果の記録手段とを備え、車間距離などを解析により求め、運転者の運転傾向を解析するものである。他にブレーキ、ステアリングなどの運転操作センサの情報を取得して用いる。このシステムでは、運転時にその場で運転者に解析結果を通知し、安全運転を支援することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−42288号公報
【特許文献2】特開2004−302902号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
交通事故の多くに追突事故がある。特に大型トラックやバス等の追突は大きな事故になりやすい。運送やバス等の事業者にとって、運転者の管理、教育などによりこのような追突事故を減少させることは、利益にも繋がるので、非常に重要である。追突事故の主な要因には、短い車間距離、居眠り運転、わき見運転等がある。これらは、各運転者の適正、癖、疲労度なども関係するので、各運転者ごとの日常の運転状態や、どのような場合に危険な運転状態に陥りやすいか、すなわち、危険な運転状態に陥りやすい運転時間、運転距離、運転環境などを分析して統計的に把握し、その結果に基づいて管理、教育を行えば事故を減少できる。上記のような運転者の管理、教育を行うことを可能とする安全運転管理システムが必要とされている。
【0007】
特許文献1に記載の運行状態記録装置および運行管理システムは、事故の発生状況を詳細に再現して事故原因を把握するため、危険状態での運転時の記録を主目的としている。一方、上記のような目的の安全運転管理システムでは、安全な運転状態の情報を危険度の高い運転状態の情報と同程度に詳細に記録し、分析し、出力する必要がある。また、特許文献1のシステムでは、安全な運転状態と危険度の高い運転状態の比較に関する統計的な把握もできない。そこで、特許文献1のシステムは上記の安全運転管理システムの用途には使用できない。
【0008】
特許文献2のシステムは、自動車教習場などにおいて、運転者の傾向や癖を、運転中に撮影された画像情報や運転操作情報により解析して運転者に通知し、安全運転を支援することを目的としている。主として動画像の解析のみによって運転者の運行状態や運転操作に関する傾向を得るものである。そこで、上記の目的の安全運転管理システムとして適用した場合、詳細な運転状態の把握や長期間にわたる運転状態の把握が十分にできないおそれがある。また、安全な運転状態と危険な運転状態の比較、分析手段、その比較結果の出力手段などが示されていないので、運転者に対する管理、教育が的確にできない。
【0009】
本発明の目的は、上記の課題を解決し、運転者の日常の運転状態や、危険な運転状態に陥りやすい運転状況などを分析し、統計的に把握して、管理、教育を行うことを可能とする車両の安全運転管理システムを提供することにある。
【課題を解決するための手段】
【0010】
第1の観点では、本発明は、車両の前方に存在する物体との距離に関する情報を取得する手段と、前記距離とは異なる車両の走行状況に関する情報を取得する手段と、前記車両の運転状態を分析する分析手段とを備え、前記分析手段は、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて、前記車両の運転状態が危険状態か否かを分析することを特徴とする車両の安全運転管理システムを提供する。
【0011】
上記第1の観点による車両の安全運転管理システムでは、分析手段により分析された情報に基づいて、運転者の日常の運転状態や、危険な運転状態に陥りやすい運転状況などを分析し、統計的に把握して、管理、教育を行うことができる。ここで、車両の前方に存在する物体との距離に関する情報には車間センサの計測情報などがあり、前記距離とは異なる車両の走行状況に関する情報としては、車両の位置や速度などの情報、さらには、走行中の道路や車両の周囲の状況などに関する情報も含まれる。また、各情報の計測時の時刻、または任意の基準時刻からの経過時間などの情報を取得することにより、各情報が関係付けられる。前記の距離に関する情報や車両の走行状況に関する情報を取得する手段としては、運転時に各々の情報の計測手段等から直接取得する方法や、記憶装置などの記憶手段に一旦記憶された情報を後に取得する方法、これらの方法を併用する方法などがある。また、分析としては、例えば、車両の運転状態が危険状態か否かを分別判定する構成とするとよい。
【0012】
第2の観点では、本発明は、前記第1の観点による車両の安全運転管理システムにおいて、前記車両の走行状況に関する情報として、前記車両の前方に存在する物体との距離が車間距離でなく周囲の構造物との間の距離である可能性があるか否かを判断するための前方確認情報を備え、前記分析手段は、前記前方確認情報に基づいて前記可能性があると判断した場合、当該可能性を加味して前記分析を行うことを特徴とする。
【0013】
車両の前方に存在する物体との距離に関する情報を得る手段として一般的に使用される車間センサは、レーザ光やマイクロ波の車両の前方の物体からの反射を検出して車間を計測するものであるので、前方に道路の周囲の構造物などの車両以外の物体が存在すると、前方車両との間の車間距離ではなくその構造物との間の距離を計測している可能性がある。そこで、前方確認情報により得られる道路の状況や道路周囲の物体、その位置関係などに基づいて、車両以外の物体との間の距離を計測している可能性がある場合、当該可能性を加味して前記分析を行うことにより、より正確に、危険状態か否かの分析を行うことができる。
【0014】
第3の観点では、本発明は、前記第2の観点による車両の安全運転管理システムにおいて、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係を特定可能に記憶する記憶手段を備え、前記分析手段は、前記記憶手段に記憶された前記距離に関する情報と前記車両の走行状況に関する情報とに基づいて、前記分析を行うことを特徴とする。
【0015】
第3の観点による車両の安全運転管理システムにおいては、分析手段は記憶手段に記憶された情報に基づいて分析を行うので、分析処理速度に対する制限は少ない。このため、特に高速の処理装置でなくとも処理が可能となり、情報を計測手段等から直接入手する場合に比べて、より安価な処理装置を使用できる。また、分析手段を車両に搭載する必要がなく、通常のパーソナルコンピュータを分析手段として適用できる可能性がある。さらに、分析処理速度に対する制限が少ないことから、より正確な前方確認情報を用いた車両以外の物体との間の距離を計測している可能性の判断や、それを加味した分析が可能となる。
【0016】
第4の観点では、本発明は、前記第2または前記第3の観点による車両の安全運転管理システムにおいて、前記分析手段は、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて、前記車両の走行状態を、前記運転状態が危険状態にない安全走行状態と、前記運転状態が危険状態にある危険走行状態とに分別し、その分別結果を出力することを特徴とする。
【0017】
上記第4の観点による車両の安全運転管理システムでは、例えば、特定の時刻、時間間隔、特定の車両の位置、特定の位置の範囲内などにおける走行状態を安全走行状態と危険走行状態とに分別して出力する。各々の状態に該当した走行時間、走行距離、走行軌跡や、危険走行状態に該当した回数などを統計的に処理できるので、運転者に対してより分かりやすく管理、教育を行うことができる。
【0018】
第5の観点では、本発明は、前記第4の観点による車両の安全運転管理システムにおいて、前記分析手段は、前記危険走行状態として、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて危険運転範囲を設定し、危険運転範囲内の走行状況と危険運転範囲外の走行状況とに基づいて前記分別結果を出力することを特徴とする。
【0019】
上記第5の観点による車両の安全運転管理システムでは、例えば、危険運転範囲内での走行時間、危険運転範囲外での走行時間、危険運転範囲内での走行回数等により危険運転度を算出し、総合的な走行判定を行うことなども可能である。また、分析手段は、危険運転範囲を設定する場合に、前記距離に関する情報と前記車両の走行状況に関する情報から運転状態が危険状態と判断された2つの状態間の時間的な間隔、位置的な間隔、またはその状態の連続性などを加味して判断して設定するとよい。
【0020】
第6の観点では、本発明は、前記第4または前記第5の観点による車両の安全運転管理システムにおいて、前記車両の走行状況に関する情報として前記車両の位置に関する情報を備え、前記前方確認情報として前記車両が走行する道路が敷設された地形または前記道路の形状に関する情報を備え、前記分析手段は、前記車両の位置に関する情報と前記地形または前記道路の形状に関する情報を加味して前記分析を行うことを特徴とする。
【0021】
上記第6の観点による車両の安全運転管理システムでは、走行時の車両の位置情報とその位置における地形や道路の形状に関する情報とを備えるので、例えば、道路の勾配、カーブや変形状態などの情報を加味して分析することにより、それらを考慮した車両以外の物体が存在する可能性の判断や、道路状態の危険度を考慮した分析が可能となる。
【0022】
第7の観点では、本発明は、前記第4から前記第6のいずれかの観点による車両の安全運転管理システムにおいて、前記前方確認情報としてカメラにより撮影された画像情報を備え、前記分析手段は、前記画像情報を加味して前記分析を行うことを特徴とする。
【0023】
上記第7の観点による車両の安全運転管理システムでは、例えば、車両に搭載されたカメラにより撮影された画像情報を取得し、その画像情報を分析することにより、車両の前方の周囲に存在する物体、それらとの間の距離や位置関係、その変化などを把握でき、より的確に、前方の物体が車両であるか他の物体であるかを識別することができる。
【0024】
第8の観点では、本発明は、前記第4から前記第7のいずれかの観点による車両の安全運転管理システムにおいて、前記前方確認情報として加速度センサまたはジャイロセンサによる計測情報を備え、前記分析手段は、前記計測情報を加味して前記分析を行うことを特徴とする。
【0025】
上記第8の観点による車両の安全運転管理システムでは、加速度センサまたはジャイロセンサによる計測情報を備えるので、それらの情報により、道路のカーブ形状や傾斜などを推定でき、前方の物体が車両であるか他の物体であるかを推定することができる。
【0026】
第9の観点では、本発明は、前記第4から前記第8のいずれかの観点による車両の安全運転管理システムにおいて、前記分析手段は、前記危険走行状態を、前記距離と前記車両の走行状態に基づいて、危険度に応じた2以上の状態にさらに分別し、その分別結果を出力することを特徴とする。
【0027】
上記第9の観点による車両の安全運転管理システムでは、危険走行状態を危険度に応じた2以上の状態にさらに分別し、各々の危険走行状態に関する情報を出力する。例えば、各々の危険走行状態の走行時間、走行距離、走行軌跡、または各々の危険走行状態に該当した回数などを出力してもよい。第9の観点による車両の安全運転管理システムでは、速度に対する車間距離の判定条件を数段階設けて、危険走行状態のレベルを分けて判定し、出力することにより、運転者に対するより細かい管理、教育が可能となる。例えば、危険走行状態のレベルを点数化して統計し、各運転者に対して、走行時間に対する点数をグラフ化すると、運転者の癖や車間距離に対する注意度などがわかるので、的確な管理、指導を行うことができる。
【0028】
第10の観点では、本発明は、前記第4から前記第9のいずれかの観点による車両の安全運転管理システムにおいて、地図を表示可能な表示部を備え、前記分析手段は、前記車両の走行軌跡を安全走行状態と危険走行状態、または2以上の危険走行状態に分別して前記地図上に表示することを特徴とする。
【0029】
上記第10の観点による車両の安全運転管理システムでは、地図上に安全走行状態と危険走行状態の軌跡を区別して表示することにより、運転者の癖や走行中の注意の程度をわかりやすく指摘でき、効果的に運転者を指導することができる。
【0030】
第11の観点では、本発明は、コンピュータを、前記第1から前記第10のいずれかの観点による車両の安全運転管理システムとして機能させるためのプログラムを提供する。
【発明の効果】
【0031】
本発明の車両の安全運転管理システムによれば、運転者の日常の運転状態や、危険な運転状態に陥りやすい運転状況などを分析し、統計的に把握して、管理、教育を行うことを可能とする車両の安全運転管理システムが得られる。
【図面の簡単な説明】
【0032】
【図1】本発明による車両の安全運転管理システムの第1の実施の形態を示す全体のブロック構成図。
【図2】第1の実施の形態の車両の安全運転管理システムの主要部である車載用電子機器を示す図であり、図2(a)は正面図、図2(b)は側面図。
【図3】本発明による車両の安全運転管理システムの第2の実施の形態を示す全体のブロック構成図。
【図4】第2の実施の形態の車両の安全運転管理システムの主要部を示す図であり、図4(a)は車載用電子機器の側面図、図4(b)はメモリカードの平面図、図4(c)はパーソナルコンピュータの正面図。
【図5】第2の実施の形態の情報処理装置21における情報処理の流れを示すフローチャート図。
【図6】本発明による車両の安全運転管理システムの第3の実施の形態を示す図であり、図6(a)は全体のブロック構成図、図6(b)は、情報処理装置31における情報処理の流れを示すフローチャート図。
【図7】本発明による車両の安全運転管理システムの第4の実施の形態を示す図であり、図7(a)は全体のブロック構成図、図7(b)は、情報処理装置51における情報処理の流れを示すフローチャート図。
【発明を実施するための形態】
【0033】
以下、図面を参照して、本発明の実施の形態について詳細に説明する。
【0034】
[第1の実施形態]
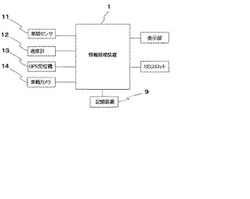
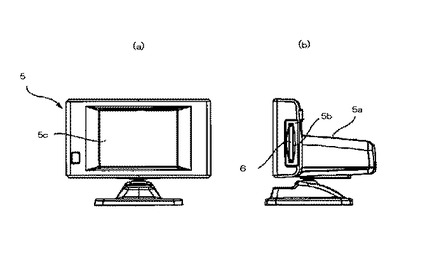
図1は、本発明による車両の安全運転管理システムの第1の実施の形態を示す全体のブロック構成図であり、図2は、本実施の形態の車両の安全運転管理システムの主要部である車載用電子機器を示す図であり、図2(a)は正面図、図2(b)は側面図である。図1に示すように、本実施の形態の車両の安全運転管理システムは、車両の前方に存在する物体との距離に関する情報を取得する手段である車間センサ11と、前記距離とは異なる車両の走行状況に関する情報として、車両の速度情報を取得する手段である速度計12と、車両の位置情報を取得する手段であるGPS受信機13と、車両の前方の画像情報を取得する手段である車載カメラ14とを備えている。また、道路情報などを記憶した記憶装置9を備えている。これらの構成から得られる情報は、これらの情報の相互の関係に基づいて車両の運転状態を分析する分析手段である情報処理装置1に入力される。また、本実施の形態の車両の安全運転管理システムは表示部とSDメモリカード用スロットを備える。
【0035】
図2において、車載用電子機器5は、本体部5a、SDメモリカード用スロット5b、表示部5cを備え、本体部5aの中に情報処理装置1、記憶装置9、GPS受信機13の機能を内蔵する。情報処理装置1は、情報の制御、処理を行うCPU、入出力インターフェイス、メモリなどを含むマイコンおよびその他の電子回路基板から構成される。
【0036】
本実施の形態において、情報処理装置1では、CPUの制御により、車間センサ11により計測された車間情報と、速度計12、GPS受信機13により計測された計測情報、および車載カメラ14により撮影された画像情報、および道路情報からなる走行状況に関する情報を入出力インターフェイスより入手する。車両の他の部分に搭載された車間センサ11、速度計12の計測情報および車載カメラ14の画像情報は信号線によって車載用電子機器5に伝送される。情報処理装置1においては、入手したそれらの情報の相互の関係に基づいて、その計測および撮影時の運転状態が危険状態か否かを分析し、分別判定する。すなわち、運転時の車間情報による距離と速度との関係、位置情報と道路情報とから分析される運転時の道路状況、画像情報から分析される運転時の前方の他の車両や物体との位置関係やその変化などを、予め定めておいた判定基準と比較分析し、分別判定する。この場合、車間情報による距離と速度の関係から定まる運転状態が危険状態か否かの判定基準は、道路状況や車両の前方の物体及びその位置関係によって異なる。
【0037】
情報処理装置1において分別判定を行った結果は、車載用電子機器5の表示部5cに表示するとともに内蔵された記憶装置9に記憶する。この場合の分別判定結果の出力形態としては、上記判定結果をその運転時点にその都度出力する出力モード、任意の時間間隔、任意の距離間隔の走行状態を分別して出力する出力モード、またはそれらの走行状態を積算などの統計的な処理をして出力する出力モードのいずれかを選択できるようにするとよい。また、車載用電子機器5の側面に備えたSDメモリカード用スロット5bにSDメモリカード6を挿入することにより、記憶装置9に記憶された分別判定結果をSDメモリカード6に転送する。SDメモリカード6を介して分別判定された結果を読み出すことにより、情報処理装置1または他の外部の装置で統計的な処理を行うことができる。
【0038】
[第2の実施の形態]
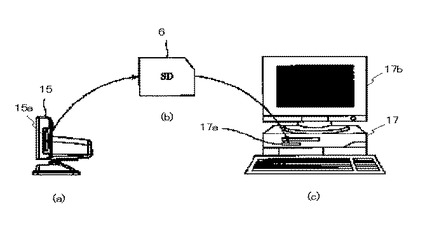
図3は、本発明による車両の安全運転管理システムの第2の実施の形態を示す全体のブロック構成図である。図4は、本実施の形態の車両の安全運転管理システムの主要部を示す図であり、図4(a)は車載用電子機器の側面図、図4(b)はメモリカードの平面図、図4(c)はパーソナルコンピュータの正面図である。図3に示すように、本実施の形態の車両の安全運転管理システムは、車両の前方に存在する物体との距離に関する情報を取得する車間センサ11と、前記距離とは異なる車両の走行状況に関する情報を取得する手段である速度計12およびGPS受信機13と、車間センサ11、速度計12およびGPS受信機13により計測された計測情報をこれら相互の関係を特定可能に記憶する記憶手段である記憶部27と、情報処理装置21とを備えている。情報処理装置21は、記憶部27に記憶された車間距離に関する情報と車両の走行状況に関する情報とそれら相互の関係に基づいて、車両の運転状態を分析する。また、記憶部27は、車両が走行する道路が敷設された地形または道路の形状に関する情報である道路・地形情報を車両の走行状況に関する情報として内部に記憶している。本実施の形態の車両の安全運転管理システムでは、記憶部27とGPS受信機13は図4(a)に示す車両に搭載した車載用電子機器15に内蔵し、情報処理装置21は図4(c)に示すパーソナルコンピュータ17を用いて構成している。また、車間センサ11、速度計12は車両に搭載している。また、分析結果を表示する表示部28を備えている。
【0039】
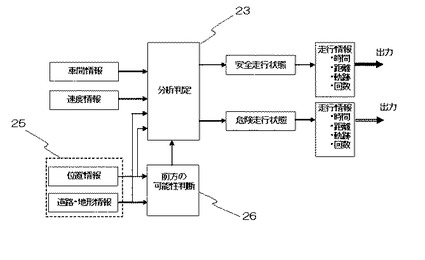
図5は、本実施の形態の情報処理装置21における情報処理の流れを示すフローチャート図である。先ず、運転時には、車間センサ11により計測された車間情報、速度計12により計測された速度情報、GPS受信機13により計測された位置情報はその運転時の時刻または任意の基準時間からの経過時間と共に車載用電子機器15に内蔵した記憶装置27に記憶する。この場合、車載用電子機器15のSDメモリカード用のスロット15aに挿入されたSDメモリカード6に直接記憶してもよい。運転終了後、車載用電子機器15から車間情報や走行状況に関する情報を記憶したSDメモリカード6を取り出し、このSDメモリカード6をパーソナルコンピュータ17の本体に設けたSDメモリカード用スロット17aに挿入することによりこれらの情報を取得する。入力情報としては、道路・地形情報も含まれる。また、車両の前方に存在する物体との距離が車間距離でなく周囲の構造物との間の距離である可能性があるか否かを判断するための前方確認情報25として、GPS受信機13により計測された位置情報と、道路・地形情報とに基づいて、前記の前方の可能性判断26を行う。次に、その可能性の判断結果と前記の車間情報、走行状況に関する情報に基づいて運転状態が危険状態か否かの分析判定23を行う。車両以外の物体との間の距離を計測している可能性を加味して分別判定を行うこと、および道路が敷設された地形や道路の形状を分析のための情報に加え、外部環境に依存した危険度の変化を考慮して判定を行うことにより、より正確に、危険状態か否かの分別判定を行うことができる。
【0040】
本実施の形態では、さらに、車両の任意の時間間隔、任意の距離間隔における走行状態を運転状態が危険状態にない安全走行状態と運転状態が危険状態にある危険走行状態とに分別し、その分別結果を処理して出力する。具体的には、分別された安全走行状態および危険走行状態の各々の走行時間、走行距離、走行軌跡および危険走行状態に該当した回数から選ばれた少なくとも1つに関する情報を出力する。上記出力結果は表示部28、すなわち、図4のパーソナルコンピュータ17の表示部17bに表示される。
【0041】
[第3の実施の形態]
図6は、本発明による車両の安全運転管理システムの第3の実施の形態を示す図であり、図6(a)は全体のブロック構成図、図6(b)は、本実施の形態の情報処理装置31における情報処理の流れを示すフローチャート図である。図6(a)に示すように、本実施の形態の車両の安全運転管理システムは、車間センサ11と、速度計12と、車両の前方を撮影可能な車載カメラ14と、ジャイロセンサ16と、車間センサ11、速度計12およびジャイロセンサ16により計測された計測情報と車載カメラ14により撮影された画像情報とを記憶する記憶部37と、前記計測情報と画像情報に基づいて運転状態を分析する情報処理装置31とを備えている。本実施の形態の車両の安全運転管理システムでは、車間センサ11、速度計12、ジャイロセンサ16、車載カメラ14および記憶部37は車両に搭載している。第2の実施の形態と同様に、記憶部37を車載用電子機器に内蔵し、情報処理装置31はパーソナルコンピュータを用いて構成することができる。
【0042】
図6(b)において、情報処理装置31は、記憶部37から、車間センサ11により計測された車間情報、速度計12により計測された速度情報、ジャイロセンサ16により計測されたジャイロセンサ計測情報、車載カメラ14により撮影された画像情報を入手する。また、車両の前方に存在する物体との距離が車間距離でなく周囲の構造物との間の距離である可能性があるか否かを判断するための前方確認情報35として、車載カメラ14により撮影された画像情報とジャイロセンサ16により計測されたジャイロセンサ計測情報とを基に、前記前方の可能性判断36を行う。次に、その可能性の判断結果と前記の車間情報、走行状況に関する情報に基づいて運転状態が危険状態か否かの分析判定33を行う。ジャイロセンサ計測情報の分析により道路の形状などを把握でき、画像情報の分析により、車両の前方の周囲に存在する物体、それらとの間の距離や位置関係、その変化、さらに、車両の前方の物体が車両であるか他の物体であるかを識別することができる。
【0043】
分析判定33においては、第2の実施の形態と同様に、車両の任意の時間間隔、任意の距離間隔における走行状態を運転状態が危険状態にない安全走行状態と運転状態が危険状態にある危険走行状態とに分別し、さらに、危険走行状態として、車間情報、速度情報、ジャイロセンサ計測情報および画像情報と、それらの相互の関係に基づいて、危険運転範囲を設定し、危険運転範囲内の走行状況と危険運転範囲外の走行状況とに基づいて前記分別結果を出力する。例えば、運転状態が危険走行状態と判断された2つの状態間の時間的な間隔、位置的な間隔、またはその状態の連続性などを加味して判断し、危険運転範囲を設定する。出力情報としては、危険運転範囲内および危険運転範囲外での走行時間、走行距離、危険運転範囲内での走行回数等がある。これらの情報により危険運転度を算出して総合的な走行判定を行い、その結果を出力してもよい。上記出力結果は表示部38に表示する。
【0044】
[第4の実施の形態]
図7は、本発明による車両の安全運転管理システムの第4の実施の形態を示す図であり、図7(a)は全体のブロック構成図、図7(b)は、本実施の形態の情報処理装置51における情報処理の流れを示すフローチャート図である。図5(a)に示すように、本実施の形態の車両の安全運転管理システムは、車両の前方に存在する物体との距離に関する情報を取得する車間センサ11と、前記距離とは異なる車両の走行状況に関する情報を取得する手段である速度計12、GPS受信機13および車両の前方を撮影可能な車載カメラ14と、車間センサ11、速度計12およびGPS受信機13により計測された計測情報および車載カメラ14により撮影された画像情報をこれら相互の関係を特定可能に記憶する記憶手段である記憶部57と、情報処理装置51とを備えている。情報処理装置51は、記憶部57に記憶された車間距離に関する情報と車両の走行状況に関する情報とそれら相互の関係に基づいて、車両の運転状態を分析する。また、記憶部57は、車両が走行する道路が敷設された地形または道路の形状に関する情報である道路・地形情報を車両の走行状況に関する情報として内部に記憶している。また、情報処理装置51による分析結果を表示する表示部58を備えている。本実施の形態の車両の安全運転管理システムでは、車間センサ11、速度計12、GPS受信機13、車載カメラ14および記憶部27は車両に搭載している。第2の実施の形態と同様に、記憶部57を車載用電子機器に内蔵し、情報処理装置51はパーソナルコンピュータを用いて構成することができる。
【0045】
図7(b)において、情報処理装置51は、記憶部57から、車間センサ11により計測された車間情報、速度計12により計測された速度情報、GPS受信機13により計測された位置情報、道路・地形情報を入手する。また、車両の前方に存在する物体との距離が車間距離でなく周囲の構造物との間の距離である可能性があるか否かを判断するための前方確認情報55として、車載カメラ14により撮影された画像情報と、GPS受信機13により計測された位置情報と、道路・地形情報とを入手し、前記の前方の可能性判断56を行う。次に、その可能性の判断結果と前記の車間情報、走行状況に関する情報に基づいて運転状態が危険状態か否かの分析判定53を行う。
【0046】
本実施の形態においては、第2の実施の形態と同様に、車両の任意の時間間隔、任意の距離間隔における走行状態を運転状態が危険状態にない安全走行状態と運転状態が危険状態にある危険走行状態とに分別し、さらに、危険走行状態を危険度に応じた3つの状態に分別する。すなわち、危険度の低い順に、危険1走行状態、危険2走行状態、危険3走行状態に分別し、各々の危険走行状態に関する情報を出力する。例えば、各々の危険走行状態の走行時間、走行距離、走行軌跡、または各々の危険走行状態に該当した回数などを出力してもよい。この場合、速度と車間距離の値により危険度の分別を行ってもよい。出力方法の一例としては、表示部58に地図を表示し、車両の走行軌跡を、安全走行状態と3つの危険走行状態とに分別して前記地図上に表示するようにしてもよい。
【0047】
なお、本発明は、上記の実施の形態に限定されるものではないことはいうまでもなく、必要とする機能に応じて、設計変更可能である。例えば、第1の実施の形態の場合、分別判定結果は挿入されたSDメモリカードにのみ記憶されてもよい。また、道路情報は車載用電子機器5に内蔵された記憶装置内ではなく、DVD装置などの外部の記憶装置から入手してもよい。
【0048】
また、第2の実施の形態において、表示部28に地図を表示し、情報処理装置21は、車両の走行軌跡を、安全走行状態と危険走行状態とに分別して前記地図上に表示するようにしてもよい。この場合の地図情報は、情報処理装置21の外部の記憶部27に収納しているが、情報処理装置21がその内部に収納し、そこから取得してもよい。さらに、パーソナルコンピュータ17を用いないで、車載用電子機器15内に情報処理装置21を設けてもよい。
【0049】
上記の各実施の形態において、車間センサとしては、レーザ方式やマイクロ波方式などを用いた一般的な車間センサが使用できる。速度の計測は、車両の速度パルス部から速度パルスを取得して行ってもよい。また、車間情報を取得する手段、その他の走行状況情報を取得する手段は、車両に搭載されていることが望ましいが、車外に備えた計測手段などであってもよい。また、分析手段としてパーソナルコンピュータを利用する場合には車外に備えるほうが望ましいが、車両に搭載されていてもよい。分析手段である情報処理装置が上記の情報を取得する方法としては、上記のように、車両運行後にメモリカードなどの記憶素子を介して取得する方法や情報処理装置と計測手段等や記憶手段との間の有線通信や無線通信により取得する方法がある。
【0050】
また、上記の各実施の形態において、情報処理装置は、車間センサにより計測された車間情報と、速度計、GPS受信機、車載カメラにより計測、撮像された情報および道路情報などからなる走行状況情報とそれらの相互の関係に基づいて計測時の運転状態が危険状態か否かを分析して判定しているが、車間センサにより計測された車間情報と、上記の走行状況情報のうちのいずれか1つの情報との相互の関係に基づいて分別判定してもよい。または、その他の計測器などの情報を判断用の情報として加え、多数の情報に基づいて分析して判定してもよい。また、出力方法は、表示部に表示する以外に、他の装置に情報として出力してもよい。一般的に、速度に対する制動距離は、車両の性能や積載量、その他の条件により異なる。そこで、車間距離と速度により運転状態が危険状態か否かを分析し判定する場合、その閾値を車両ごとに異なる値で設定することができる。または、一般的に推奨されている安全車間距離や法定車間距離に基づいて統一的にその閾値を定めてもよい。この場合、速度と安全車間距離の関係を数式化、またはチャート化して閾値を定めてもよい。
【0051】
また、本発明の車両の安全運転管理システムを次のように構成してもよい。
車間距離を計測する車間センサと、車両の位置や速度を計測する車両走行計測部と、それらの計測データを同時に記憶する記憶部で構成された車載機と、車載機に記憶された上記データを収集して、運転状態を分析する分析装置(コンピュータ)でシステムを構成する。この場合、速度と車間距離により、危険運転範囲を設定し、危険運転範囲内での走行時間、危険運転範囲外での走行時間、危険運転範囲内での走行回数等により、危険運転度を算出し、運転者の管理、指導を行なう資料を出力(表示、印刷等)してもよい。また、上記の記憶された車両の位置データより、分析装置の地図上に走行軌跡を表示し、危険運転範囲内での走行軌跡と危険運転範囲外での走行軌跡が区分して分かる様に出力してもよい。この出力内容を運転者の指導に使用する。同時に、地形や道路形状により上記危険運転度の評価を変更するようにしてもよい。また、車間ではなく、周囲の構造物との距離を計測している可能性のある場所を排除して判定してもよい。
【0052】
また、本発明の車両の安全運転管理システムを次のように構成してもよい。
車間距離を計測する車間センサと、車両の速度を計測する度計測部と、前方を撮影するカメラと、それらの計測・撮影データを同時に記憶する記憶部で構成された車載機と、車載機に記憶された上記データを収集して、運転状態を分析する分析装置(コンピュータ)でシステムを構成する。例えば、速度は車両の速度パルス部から取ってもよい。この場合、速度と車間距離により、危険運転範囲を設定し、危険運転範囲内での走行時間、危険運転範囲外での走行時間、危険運転範囲内での走行回数等により、危険運転度を算出し、運転者の管理、指導を行なう資料を出力(表示、印刷等)してもよい。また、上記の危険運転範囲内の走行中に撮影された画像から、車間距離データが、車間ではなく、周囲の構造物との距離を計測している可能性のある場所を排除して判定してもよい。
【0053】
また、本発明の車両の安全運転管理システムを次のように構成してもよい。
車間距離を計測する車間センサと、車両の速度を計測する速度計測部と、車両の動きを検知するGセンサ、またはジャイロセンサと、それらの計測データを同時に記憶する記憶部で構成された車載機と、車載機に記憶された上記データを収集して、運転状態を分析する分析装置(コンピュータ)でシステムを構成する。例えば、速度は車両の速度パルス部から取ってもよい。この場合、速度と車間距離により、危険運転範囲を設定し、危険運転範囲内での走行時間、危険運転範囲外での走行時間、危険運転範囲内での走行回数等により、危険運転度を算出し、運転者の管理、指導を行なう資料を出力(表示、印刷等)してもよい。また、上記の危険運転範囲内の走行のGセンサ、またはジャイロセンサの出力により、車間距離データが、車問ではなく、周囲の構造物との距離を計測している可能性のある場所を排除して判定してもよい。例えば、Gセンサ、またはジャイロセンサによりカーブを検出し、カーブでは他の構造物との距離を計測している可能性があるので排除する。
【0054】
さらに、本発明の車両の安全運転管理システムにおいて、相対速度と車間距離に基づき、追突の危険性がある範囲内に入った場合、警報を発する機能を入れるとよい。前方車両と周囲の構造物等の識別が難しく、本目的とは異なるので入れなくてもよいが、例えば、警報する車間距離を短くし周囲の構造物等との識別を行なわない構成の場合にはこの機能を入れると良い。また、警報は行なわなく、車間距離の表示のみを行う構成としてもよい。
【0055】
本発明の車両の安全運転管理システムにおいて、分析については次のようにしてもよい。例えば、速度に対する制動距離は車両の性能や積載量、その他の条件により異なるが、時速100Km時に100mの車間距離が安全車間距離として危険な車間距離であるか否かを判定するとよい。あるいは、法定車間距離を基にしてもよい。評価は、速度と安全車間距離の関係を数式化、またはチャート化し、それを超えて走行した時間や回数で判定するとよい。更に、速度に対する車間距離の評価は判定基準を数段階設け、点数制にするとよい。例えば、時速100Kmでの車間距離100mは0点、80m5点、70m10点、60m20点、50m40点、40m80点、30m160点、20m以下は危険運転とするとよい。点数は速度の関数にするとよい。所定の速度以上の走行時のみを管理してもよい。また横軸を走行時間、縦軸を上記点数でグラフ化するとよい。運転者の癖や車間距離に対する注意度が分かるので運転者の教育に使うことができる。評価と教育を常に行なう事により安全な車間距離を取って運転する癖にすれば追突事故を減少できる。
【0056】
交通事故の多くに追突事故がある。特に大型トラックやバス等では大きな事故になる。上記のようなシステムによれば、運送やバス等の事業者は運転者の管理、教育等により事故を減少できれば利益にも繋がる。特に、追突事故防止の為の運転者管理、教育の為のシステムを提供できる。追突事故の主な要因に、短い車間距離、居眠り運転、脇見運転等があるが、これらは、運転者の適正、癖、疲労度等も関係し、事業者の管理、教育により減少できる。
【符号の説明】
【0057】
1、21、31、51 情報処理装置
3、23、33、53 分析判定
5、15 車載用電子機器
5a 本体
5b、15a、17a SDメモリカード用スロット
6 SDメモリカード
17 パーソナルコンピュータ
5c、17b、28、38、58 表示部
9 記憶装置
11 車間センサ
12 速度計
13 GPS受信機
14 車載カメラ
16 ジャイロセンサ
25、35、55 前方確認情報
26、36、56 前方の可能性判断
27、37、57 記憶部
【技術分野】
【0001】
本発明は、車両の運転者の運行結果の分析に基づいて、運転者に対する管理、教育を行うための車両の安全運転管理システムに関する。
【背景技術】
【0002】
従来、車両の運転者の運行結果により、運転者に対する安全運転指導や安全運転支援を行うことが可能なシステムとしては、特許文献1および2に記載されたシステムがある。
【0003】
特許文献1に記載のシステムは、車両事故の事故原因の解析と、事故の再発予防を主目的としており、このため、事故の発生状況を詳細に再現することを可能にし、その再現情報に基づいて事故原因を解析し、事故の再発予防に寄与することができる運行状態記録装置および運行管理システムを提供するものである。このシステムの具体的な機能としては、運転中の車両の基本的な運行状況を常に記録する第1の記録モードを、所定の判定条件が成立したときに、詳細な運行状況を記録する第2の記録モードへと切り替え、事故の発生の危険性が高まった運行時にのみ詳細な情報を記録するものである。例えば、第1の記録モードは、走行速度、車間距離、周辺監視結果、エンジン回転速度、ブレーキ踏み圧力などのうち少なくとも1つの情報を記録するものであり、第2の記録モードは前記情報のうち第1の記録モードよりも多い複数の情報を記録し、かつ、サンプリング周期も第1の記録モードよりも短い周期としている。記録モードを切り替える判定条件は、危険検出手段を設けて、その危険検出手段が上記情報により危険と判定したとき、例えば、過度の速度オーバーや、急ブレーキ、急ハンドル、蛇行走行時などである。また、危険時の運転者への警告手段や外部への通報手段も含んでいる。
【0004】
特許文献2に記載のシステムは、各種センサを必要としない簡単な装置構成で運転者の傾向を解析し、安全運転を支援することが可能な運転システムの提供を目的としている。このシステムの特徴としては、主として、自車の周囲の少なくとも一部を動画像として撮影する撮影手段と、その動画像の解析手段と、その解析結果の記録手段とを備え、車間距離などを解析により求め、運転者の運転傾向を解析するものである。他にブレーキ、ステアリングなどの運転操作センサの情報を取得して用いる。このシステムでは、運転時にその場で運転者に解析結果を通知し、安全運転を支援することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2002−42288号公報
【特許文献2】特開2004−302902号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
交通事故の多くに追突事故がある。特に大型トラックやバス等の追突は大きな事故になりやすい。運送やバス等の事業者にとって、運転者の管理、教育などによりこのような追突事故を減少させることは、利益にも繋がるので、非常に重要である。追突事故の主な要因には、短い車間距離、居眠り運転、わき見運転等がある。これらは、各運転者の適正、癖、疲労度なども関係するので、各運転者ごとの日常の運転状態や、どのような場合に危険な運転状態に陥りやすいか、すなわち、危険な運転状態に陥りやすい運転時間、運転距離、運転環境などを分析して統計的に把握し、その結果に基づいて管理、教育を行えば事故を減少できる。上記のような運転者の管理、教育を行うことを可能とする安全運転管理システムが必要とされている。
【0007】
特許文献1に記載の運行状態記録装置および運行管理システムは、事故の発生状況を詳細に再現して事故原因を把握するため、危険状態での運転時の記録を主目的としている。一方、上記のような目的の安全運転管理システムでは、安全な運転状態の情報を危険度の高い運転状態の情報と同程度に詳細に記録し、分析し、出力する必要がある。また、特許文献1のシステムでは、安全な運転状態と危険度の高い運転状態の比較に関する統計的な把握もできない。そこで、特許文献1のシステムは上記の安全運転管理システムの用途には使用できない。
【0008】
特許文献2のシステムは、自動車教習場などにおいて、運転者の傾向や癖を、運転中に撮影された画像情報や運転操作情報により解析して運転者に通知し、安全運転を支援することを目的としている。主として動画像の解析のみによって運転者の運行状態や運転操作に関する傾向を得るものである。そこで、上記の目的の安全運転管理システムとして適用した場合、詳細な運転状態の把握や長期間にわたる運転状態の把握が十分にできないおそれがある。また、安全な運転状態と危険な運転状態の比較、分析手段、その比較結果の出力手段などが示されていないので、運転者に対する管理、教育が的確にできない。
【0009】
本発明の目的は、上記の課題を解決し、運転者の日常の運転状態や、危険な運転状態に陥りやすい運転状況などを分析し、統計的に把握して、管理、教育を行うことを可能とする車両の安全運転管理システムを提供することにある。
【課題を解決するための手段】
【0010】
第1の観点では、本発明は、車両の前方に存在する物体との距離に関する情報を取得する手段と、前記距離とは異なる車両の走行状況に関する情報を取得する手段と、前記車両の運転状態を分析する分析手段とを備え、前記分析手段は、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて、前記車両の運転状態が危険状態か否かを分析することを特徴とする車両の安全運転管理システムを提供する。
【0011】
上記第1の観点による車両の安全運転管理システムでは、分析手段により分析された情報に基づいて、運転者の日常の運転状態や、危険な運転状態に陥りやすい運転状況などを分析し、統計的に把握して、管理、教育を行うことができる。ここで、車両の前方に存在する物体との距離に関する情報には車間センサの計測情報などがあり、前記距離とは異なる車両の走行状況に関する情報としては、車両の位置や速度などの情報、さらには、走行中の道路や車両の周囲の状況などに関する情報も含まれる。また、各情報の計測時の時刻、または任意の基準時刻からの経過時間などの情報を取得することにより、各情報が関係付けられる。前記の距離に関する情報や車両の走行状況に関する情報を取得する手段としては、運転時に各々の情報の計測手段等から直接取得する方法や、記憶装置などの記憶手段に一旦記憶された情報を後に取得する方法、これらの方法を併用する方法などがある。また、分析としては、例えば、車両の運転状態が危険状態か否かを分別判定する構成とするとよい。
【0012】
第2の観点では、本発明は、前記第1の観点による車両の安全運転管理システムにおいて、前記車両の走行状況に関する情報として、前記車両の前方に存在する物体との距離が車間距離でなく周囲の構造物との間の距離である可能性があるか否かを判断するための前方確認情報を備え、前記分析手段は、前記前方確認情報に基づいて前記可能性があると判断した場合、当該可能性を加味して前記分析を行うことを特徴とする。
【0013】
車両の前方に存在する物体との距離に関する情報を得る手段として一般的に使用される車間センサは、レーザ光やマイクロ波の車両の前方の物体からの反射を検出して車間を計測するものであるので、前方に道路の周囲の構造物などの車両以外の物体が存在すると、前方車両との間の車間距離ではなくその構造物との間の距離を計測している可能性がある。そこで、前方確認情報により得られる道路の状況や道路周囲の物体、その位置関係などに基づいて、車両以外の物体との間の距離を計測している可能性がある場合、当該可能性を加味して前記分析を行うことにより、より正確に、危険状態か否かの分析を行うことができる。
【0014】
第3の観点では、本発明は、前記第2の観点による車両の安全運転管理システムにおいて、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係を特定可能に記憶する記憶手段を備え、前記分析手段は、前記記憶手段に記憶された前記距離に関する情報と前記車両の走行状況に関する情報とに基づいて、前記分析を行うことを特徴とする。
【0015】
第3の観点による車両の安全運転管理システムにおいては、分析手段は記憶手段に記憶された情報に基づいて分析を行うので、分析処理速度に対する制限は少ない。このため、特に高速の処理装置でなくとも処理が可能となり、情報を計測手段等から直接入手する場合に比べて、より安価な処理装置を使用できる。また、分析手段を車両に搭載する必要がなく、通常のパーソナルコンピュータを分析手段として適用できる可能性がある。さらに、分析処理速度に対する制限が少ないことから、より正確な前方確認情報を用いた車両以外の物体との間の距離を計測している可能性の判断や、それを加味した分析が可能となる。
【0016】
第4の観点では、本発明は、前記第2または前記第3の観点による車両の安全運転管理システムにおいて、前記分析手段は、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて、前記車両の走行状態を、前記運転状態が危険状態にない安全走行状態と、前記運転状態が危険状態にある危険走行状態とに分別し、その分別結果を出力することを特徴とする。
【0017】
上記第4の観点による車両の安全運転管理システムでは、例えば、特定の時刻、時間間隔、特定の車両の位置、特定の位置の範囲内などにおける走行状態を安全走行状態と危険走行状態とに分別して出力する。各々の状態に該当した走行時間、走行距離、走行軌跡や、危険走行状態に該当した回数などを統計的に処理できるので、運転者に対してより分かりやすく管理、教育を行うことができる。
【0018】
第5の観点では、本発明は、前記第4の観点による車両の安全運転管理システムにおいて、前記分析手段は、前記危険走行状態として、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて危険運転範囲を設定し、危険運転範囲内の走行状況と危険運転範囲外の走行状況とに基づいて前記分別結果を出力することを特徴とする。
【0019】
上記第5の観点による車両の安全運転管理システムでは、例えば、危険運転範囲内での走行時間、危険運転範囲外での走行時間、危険運転範囲内での走行回数等により危険運転度を算出し、総合的な走行判定を行うことなども可能である。また、分析手段は、危険運転範囲を設定する場合に、前記距離に関する情報と前記車両の走行状況に関する情報から運転状態が危険状態と判断された2つの状態間の時間的な間隔、位置的な間隔、またはその状態の連続性などを加味して判断して設定するとよい。
【0020】
第6の観点では、本発明は、前記第4または前記第5の観点による車両の安全運転管理システムにおいて、前記車両の走行状況に関する情報として前記車両の位置に関する情報を備え、前記前方確認情報として前記車両が走行する道路が敷設された地形または前記道路の形状に関する情報を備え、前記分析手段は、前記車両の位置に関する情報と前記地形または前記道路の形状に関する情報を加味して前記分析を行うことを特徴とする。
【0021】
上記第6の観点による車両の安全運転管理システムでは、走行時の車両の位置情報とその位置における地形や道路の形状に関する情報とを備えるので、例えば、道路の勾配、カーブや変形状態などの情報を加味して分析することにより、それらを考慮した車両以外の物体が存在する可能性の判断や、道路状態の危険度を考慮した分析が可能となる。
【0022】
第7の観点では、本発明は、前記第4から前記第6のいずれかの観点による車両の安全運転管理システムにおいて、前記前方確認情報としてカメラにより撮影された画像情報を備え、前記分析手段は、前記画像情報を加味して前記分析を行うことを特徴とする。
【0023】
上記第7の観点による車両の安全運転管理システムでは、例えば、車両に搭載されたカメラにより撮影された画像情報を取得し、その画像情報を分析することにより、車両の前方の周囲に存在する物体、それらとの間の距離や位置関係、その変化などを把握でき、より的確に、前方の物体が車両であるか他の物体であるかを識別することができる。
【0024】
第8の観点では、本発明は、前記第4から前記第7のいずれかの観点による車両の安全運転管理システムにおいて、前記前方確認情報として加速度センサまたはジャイロセンサによる計測情報を備え、前記分析手段は、前記計測情報を加味して前記分析を行うことを特徴とする。
【0025】
上記第8の観点による車両の安全運転管理システムでは、加速度センサまたはジャイロセンサによる計測情報を備えるので、それらの情報により、道路のカーブ形状や傾斜などを推定でき、前方の物体が車両であるか他の物体であるかを推定することができる。
【0026】
第9の観点では、本発明は、前記第4から前記第8のいずれかの観点による車両の安全運転管理システムにおいて、前記分析手段は、前記危険走行状態を、前記距離と前記車両の走行状態に基づいて、危険度に応じた2以上の状態にさらに分別し、その分別結果を出力することを特徴とする。
【0027】
上記第9の観点による車両の安全運転管理システムでは、危険走行状態を危険度に応じた2以上の状態にさらに分別し、各々の危険走行状態に関する情報を出力する。例えば、各々の危険走行状態の走行時間、走行距離、走行軌跡、または各々の危険走行状態に該当した回数などを出力してもよい。第9の観点による車両の安全運転管理システムでは、速度に対する車間距離の判定条件を数段階設けて、危険走行状態のレベルを分けて判定し、出力することにより、運転者に対するより細かい管理、教育が可能となる。例えば、危険走行状態のレベルを点数化して統計し、各運転者に対して、走行時間に対する点数をグラフ化すると、運転者の癖や車間距離に対する注意度などがわかるので、的確な管理、指導を行うことができる。
【0028】
第10の観点では、本発明は、前記第4から前記第9のいずれかの観点による車両の安全運転管理システムにおいて、地図を表示可能な表示部を備え、前記分析手段は、前記車両の走行軌跡を安全走行状態と危険走行状態、または2以上の危険走行状態に分別して前記地図上に表示することを特徴とする。
【0029】
上記第10の観点による車両の安全運転管理システムでは、地図上に安全走行状態と危険走行状態の軌跡を区別して表示することにより、運転者の癖や走行中の注意の程度をわかりやすく指摘でき、効果的に運転者を指導することができる。
【0030】
第11の観点では、本発明は、コンピュータを、前記第1から前記第10のいずれかの観点による車両の安全運転管理システムとして機能させるためのプログラムを提供する。
【発明の効果】
【0031】
本発明の車両の安全運転管理システムによれば、運転者の日常の運転状態や、危険な運転状態に陥りやすい運転状況などを分析し、統計的に把握して、管理、教育を行うことを可能とする車両の安全運転管理システムが得られる。
【図面の簡単な説明】
【0032】
【図1】本発明による車両の安全運転管理システムの第1の実施の形態を示す全体のブロック構成図。
【図2】第1の実施の形態の車両の安全運転管理システムの主要部である車載用電子機器を示す図であり、図2(a)は正面図、図2(b)は側面図。
【図3】本発明による車両の安全運転管理システムの第2の実施の形態を示す全体のブロック構成図。
【図4】第2の実施の形態の車両の安全運転管理システムの主要部を示す図であり、図4(a)は車載用電子機器の側面図、図4(b)はメモリカードの平面図、図4(c)はパーソナルコンピュータの正面図。
【図5】第2の実施の形態の情報処理装置21における情報処理の流れを示すフローチャート図。
【図6】本発明による車両の安全運転管理システムの第3の実施の形態を示す図であり、図6(a)は全体のブロック構成図、図6(b)は、情報処理装置31における情報処理の流れを示すフローチャート図。
【図7】本発明による車両の安全運転管理システムの第4の実施の形態を示す図であり、図7(a)は全体のブロック構成図、図7(b)は、情報処理装置51における情報処理の流れを示すフローチャート図。
【発明を実施するための形態】
【0033】
以下、図面を参照して、本発明の実施の形態について詳細に説明する。
【0034】
[第1の実施形態]
図1は、本発明による車両の安全運転管理システムの第1の実施の形態を示す全体のブロック構成図であり、図2は、本実施の形態の車両の安全運転管理システムの主要部である車載用電子機器を示す図であり、図2(a)は正面図、図2(b)は側面図である。図1に示すように、本実施の形態の車両の安全運転管理システムは、車両の前方に存在する物体との距離に関する情報を取得する手段である車間センサ11と、前記距離とは異なる車両の走行状況に関する情報として、車両の速度情報を取得する手段である速度計12と、車両の位置情報を取得する手段であるGPS受信機13と、車両の前方の画像情報を取得する手段である車載カメラ14とを備えている。また、道路情報などを記憶した記憶装置9を備えている。これらの構成から得られる情報は、これらの情報の相互の関係に基づいて車両の運転状態を分析する分析手段である情報処理装置1に入力される。また、本実施の形態の車両の安全運転管理システムは表示部とSDメモリカード用スロットを備える。
【0035】
図2において、車載用電子機器5は、本体部5a、SDメモリカード用スロット5b、表示部5cを備え、本体部5aの中に情報処理装置1、記憶装置9、GPS受信機13の機能を内蔵する。情報処理装置1は、情報の制御、処理を行うCPU、入出力インターフェイス、メモリなどを含むマイコンおよびその他の電子回路基板から構成される。
【0036】
本実施の形態において、情報処理装置1では、CPUの制御により、車間センサ11により計測された車間情報と、速度計12、GPS受信機13により計測された計測情報、および車載カメラ14により撮影された画像情報、および道路情報からなる走行状況に関する情報を入出力インターフェイスより入手する。車両の他の部分に搭載された車間センサ11、速度計12の計測情報および車載カメラ14の画像情報は信号線によって車載用電子機器5に伝送される。情報処理装置1においては、入手したそれらの情報の相互の関係に基づいて、その計測および撮影時の運転状態が危険状態か否かを分析し、分別判定する。すなわち、運転時の車間情報による距離と速度との関係、位置情報と道路情報とから分析される運転時の道路状況、画像情報から分析される運転時の前方の他の車両や物体との位置関係やその変化などを、予め定めておいた判定基準と比較分析し、分別判定する。この場合、車間情報による距離と速度の関係から定まる運転状態が危険状態か否かの判定基準は、道路状況や車両の前方の物体及びその位置関係によって異なる。
【0037】
情報処理装置1において分別判定を行った結果は、車載用電子機器5の表示部5cに表示するとともに内蔵された記憶装置9に記憶する。この場合の分別判定結果の出力形態としては、上記判定結果をその運転時点にその都度出力する出力モード、任意の時間間隔、任意の距離間隔の走行状態を分別して出力する出力モード、またはそれらの走行状態を積算などの統計的な処理をして出力する出力モードのいずれかを選択できるようにするとよい。また、車載用電子機器5の側面に備えたSDメモリカード用スロット5bにSDメモリカード6を挿入することにより、記憶装置9に記憶された分別判定結果をSDメモリカード6に転送する。SDメモリカード6を介して分別判定された結果を読み出すことにより、情報処理装置1または他の外部の装置で統計的な処理を行うことができる。
【0038】
[第2の実施の形態]
図3は、本発明による車両の安全運転管理システムの第2の実施の形態を示す全体のブロック構成図である。図4は、本実施の形態の車両の安全運転管理システムの主要部を示す図であり、図4(a)は車載用電子機器の側面図、図4(b)はメモリカードの平面図、図4(c)はパーソナルコンピュータの正面図である。図3に示すように、本実施の形態の車両の安全運転管理システムは、車両の前方に存在する物体との距離に関する情報を取得する車間センサ11と、前記距離とは異なる車両の走行状況に関する情報を取得する手段である速度計12およびGPS受信機13と、車間センサ11、速度計12およびGPS受信機13により計測された計測情報をこれら相互の関係を特定可能に記憶する記憶手段である記憶部27と、情報処理装置21とを備えている。情報処理装置21は、記憶部27に記憶された車間距離に関する情報と車両の走行状況に関する情報とそれら相互の関係に基づいて、車両の運転状態を分析する。また、記憶部27は、車両が走行する道路が敷設された地形または道路の形状に関する情報である道路・地形情報を車両の走行状況に関する情報として内部に記憶している。本実施の形態の車両の安全運転管理システムでは、記憶部27とGPS受信機13は図4(a)に示す車両に搭載した車載用電子機器15に内蔵し、情報処理装置21は図4(c)に示すパーソナルコンピュータ17を用いて構成している。また、車間センサ11、速度計12は車両に搭載している。また、分析結果を表示する表示部28を備えている。
【0039】
図5は、本実施の形態の情報処理装置21における情報処理の流れを示すフローチャート図である。先ず、運転時には、車間センサ11により計測された車間情報、速度計12により計測された速度情報、GPS受信機13により計測された位置情報はその運転時の時刻または任意の基準時間からの経過時間と共に車載用電子機器15に内蔵した記憶装置27に記憶する。この場合、車載用電子機器15のSDメモリカード用のスロット15aに挿入されたSDメモリカード6に直接記憶してもよい。運転終了後、車載用電子機器15から車間情報や走行状況に関する情報を記憶したSDメモリカード6を取り出し、このSDメモリカード6をパーソナルコンピュータ17の本体に設けたSDメモリカード用スロット17aに挿入することによりこれらの情報を取得する。入力情報としては、道路・地形情報も含まれる。また、車両の前方に存在する物体との距離が車間距離でなく周囲の構造物との間の距離である可能性があるか否かを判断するための前方確認情報25として、GPS受信機13により計測された位置情報と、道路・地形情報とに基づいて、前記の前方の可能性判断26を行う。次に、その可能性の判断結果と前記の車間情報、走行状況に関する情報に基づいて運転状態が危険状態か否かの分析判定23を行う。車両以外の物体との間の距離を計測している可能性を加味して分別判定を行うこと、および道路が敷設された地形や道路の形状を分析のための情報に加え、外部環境に依存した危険度の変化を考慮して判定を行うことにより、より正確に、危険状態か否かの分別判定を行うことができる。
【0040】
本実施の形態では、さらに、車両の任意の時間間隔、任意の距離間隔における走行状態を運転状態が危険状態にない安全走行状態と運転状態が危険状態にある危険走行状態とに分別し、その分別結果を処理して出力する。具体的には、分別された安全走行状態および危険走行状態の各々の走行時間、走行距離、走行軌跡および危険走行状態に該当した回数から選ばれた少なくとも1つに関する情報を出力する。上記出力結果は表示部28、すなわち、図4のパーソナルコンピュータ17の表示部17bに表示される。
【0041】
[第3の実施の形態]
図6は、本発明による車両の安全運転管理システムの第3の実施の形態を示す図であり、図6(a)は全体のブロック構成図、図6(b)は、本実施の形態の情報処理装置31における情報処理の流れを示すフローチャート図である。図6(a)に示すように、本実施の形態の車両の安全運転管理システムは、車間センサ11と、速度計12と、車両の前方を撮影可能な車載カメラ14と、ジャイロセンサ16と、車間センサ11、速度計12およびジャイロセンサ16により計測された計測情報と車載カメラ14により撮影された画像情報とを記憶する記憶部37と、前記計測情報と画像情報に基づいて運転状態を分析する情報処理装置31とを備えている。本実施の形態の車両の安全運転管理システムでは、車間センサ11、速度計12、ジャイロセンサ16、車載カメラ14および記憶部37は車両に搭載している。第2の実施の形態と同様に、記憶部37を車載用電子機器に内蔵し、情報処理装置31はパーソナルコンピュータを用いて構成することができる。
【0042】
図6(b)において、情報処理装置31は、記憶部37から、車間センサ11により計測された車間情報、速度計12により計測された速度情報、ジャイロセンサ16により計測されたジャイロセンサ計測情報、車載カメラ14により撮影された画像情報を入手する。また、車両の前方に存在する物体との距離が車間距離でなく周囲の構造物との間の距離である可能性があるか否かを判断するための前方確認情報35として、車載カメラ14により撮影された画像情報とジャイロセンサ16により計測されたジャイロセンサ計測情報とを基に、前記前方の可能性判断36を行う。次に、その可能性の判断結果と前記の車間情報、走行状況に関する情報に基づいて運転状態が危険状態か否かの分析判定33を行う。ジャイロセンサ計測情報の分析により道路の形状などを把握でき、画像情報の分析により、車両の前方の周囲に存在する物体、それらとの間の距離や位置関係、その変化、さらに、車両の前方の物体が車両であるか他の物体であるかを識別することができる。
【0043】
分析判定33においては、第2の実施の形態と同様に、車両の任意の時間間隔、任意の距離間隔における走行状態を運転状態が危険状態にない安全走行状態と運転状態が危険状態にある危険走行状態とに分別し、さらに、危険走行状態として、車間情報、速度情報、ジャイロセンサ計測情報および画像情報と、それらの相互の関係に基づいて、危険運転範囲を設定し、危険運転範囲内の走行状況と危険運転範囲外の走行状況とに基づいて前記分別結果を出力する。例えば、運転状態が危険走行状態と判断された2つの状態間の時間的な間隔、位置的な間隔、またはその状態の連続性などを加味して判断し、危険運転範囲を設定する。出力情報としては、危険運転範囲内および危険運転範囲外での走行時間、走行距離、危険運転範囲内での走行回数等がある。これらの情報により危険運転度を算出して総合的な走行判定を行い、その結果を出力してもよい。上記出力結果は表示部38に表示する。
【0044】
[第4の実施の形態]
図7は、本発明による車両の安全運転管理システムの第4の実施の形態を示す図であり、図7(a)は全体のブロック構成図、図7(b)は、本実施の形態の情報処理装置51における情報処理の流れを示すフローチャート図である。図5(a)に示すように、本実施の形態の車両の安全運転管理システムは、車両の前方に存在する物体との距離に関する情報を取得する車間センサ11と、前記距離とは異なる車両の走行状況に関する情報を取得する手段である速度計12、GPS受信機13および車両の前方を撮影可能な車載カメラ14と、車間センサ11、速度計12およびGPS受信機13により計測された計測情報および車載カメラ14により撮影された画像情報をこれら相互の関係を特定可能に記憶する記憶手段である記憶部57と、情報処理装置51とを備えている。情報処理装置51は、記憶部57に記憶された車間距離に関する情報と車両の走行状況に関する情報とそれら相互の関係に基づいて、車両の運転状態を分析する。また、記憶部57は、車両が走行する道路が敷設された地形または道路の形状に関する情報である道路・地形情報を車両の走行状況に関する情報として内部に記憶している。また、情報処理装置51による分析結果を表示する表示部58を備えている。本実施の形態の車両の安全運転管理システムでは、車間センサ11、速度計12、GPS受信機13、車載カメラ14および記憶部27は車両に搭載している。第2の実施の形態と同様に、記憶部57を車載用電子機器に内蔵し、情報処理装置51はパーソナルコンピュータを用いて構成することができる。
【0045】
図7(b)において、情報処理装置51は、記憶部57から、車間センサ11により計測された車間情報、速度計12により計測された速度情報、GPS受信機13により計測された位置情報、道路・地形情報を入手する。また、車両の前方に存在する物体との距離が車間距離でなく周囲の構造物との間の距離である可能性があるか否かを判断するための前方確認情報55として、車載カメラ14により撮影された画像情報と、GPS受信機13により計測された位置情報と、道路・地形情報とを入手し、前記の前方の可能性判断56を行う。次に、その可能性の判断結果と前記の車間情報、走行状況に関する情報に基づいて運転状態が危険状態か否かの分析判定53を行う。
【0046】
本実施の形態においては、第2の実施の形態と同様に、車両の任意の時間間隔、任意の距離間隔における走行状態を運転状態が危険状態にない安全走行状態と運転状態が危険状態にある危険走行状態とに分別し、さらに、危険走行状態を危険度に応じた3つの状態に分別する。すなわち、危険度の低い順に、危険1走行状態、危険2走行状態、危険3走行状態に分別し、各々の危険走行状態に関する情報を出力する。例えば、各々の危険走行状態の走行時間、走行距離、走行軌跡、または各々の危険走行状態に該当した回数などを出力してもよい。この場合、速度と車間距離の値により危険度の分別を行ってもよい。出力方法の一例としては、表示部58に地図を表示し、車両の走行軌跡を、安全走行状態と3つの危険走行状態とに分別して前記地図上に表示するようにしてもよい。
【0047】
なお、本発明は、上記の実施の形態に限定されるものではないことはいうまでもなく、必要とする機能に応じて、設計変更可能である。例えば、第1の実施の形態の場合、分別判定結果は挿入されたSDメモリカードにのみ記憶されてもよい。また、道路情報は車載用電子機器5に内蔵された記憶装置内ではなく、DVD装置などの外部の記憶装置から入手してもよい。
【0048】
また、第2の実施の形態において、表示部28に地図を表示し、情報処理装置21は、車両の走行軌跡を、安全走行状態と危険走行状態とに分別して前記地図上に表示するようにしてもよい。この場合の地図情報は、情報処理装置21の外部の記憶部27に収納しているが、情報処理装置21がその内部に収納し、そこから取得してもよい。さらに、パーソナルコンピュータ17を用いないで、車載用電子機器15内に情報処理装置21を設けてもよい。
【0049】
上記の各実施の形態において、車間センサとしては、レーザ方式やマイクロ波方式などを用いた一般的な車間センサが使用できる。速度の計測は、車両の速度パルス部から速度パルスを取得して行ってもよい。また、車間情報を取得する手段、その他の走行状況情報を取得する手段は、車両に搭載されていることが望ましいが、車外に備えた計測手段などであってもよい。また、分析手段としてパーソナルコンピュータを利用する場合には車外に備えるほうが望ましいが、車両に搭載されていてもよい。分析手段である情報処理装置が上記の情報を取得する方法としては、上記のように、車両運行後にメモリカードなどの記憶素子を介して取得する方法や情報処理装置と計測手段等や記憶手段との間の有線通信や無線通信により取得する方法がある。
【0050】
また、上記の各実施の形態において、情報処理装置は、車間センサにより計測された車間情報と、速度計、GPS受信機、車載カメラにより計測、撮像された情報および道路情報などからなる走行状況情報とそれらの相互の関係に基づいて計測時の運転状態が危険状態か否かを分析して判定しているが、車間センサにより計測された車間情報と、上記の走行状況情報のうちのいずれか1つの情報との相互の関係に基づいて分別判定してもよい。または、その他の計測器などの情報を判断用の情報として加え、多数の情報に基づいて分析して判定してもよい。また、出力方法は、表示部に表示する以外に、他の装置に情報として出力してもよい。一般的に、速度に対する制動距離は、車両の性能や積載量、その他の条件により異なる。そこで、車間距離と速度により運転状態が危険状態か否かを分析し判定する場合、その閾値を車両ごとに異なる値で設定することができる。または、一般的に推奨されている安全車間距離や法定車間距離に基づいて統一的にその閾値を定めてもよい。この場合、速度と安全車間距離の関係を数式化、またはチャート化して閾値を定めてもよい。
【0051】
また、本発明の車両の安全運転管理システムを次のように構成してもよい。
車間距離を計測する車間センサと、車両の位置や速度を計測する車両走行計測部と、それらの計測データを同時に記憶する記憶部で構成された車載機と、車載機に記憶された上記データを収集して、運転状態を分析する分析装置(コンピュータ)でシステムを構成する。この場合、速度と車間距離により、危険運転範囲を設定し、危険運転範囲内での走行時間、危険運転範囲外での走行時間、危険運転範囲内での走行回数等により、危険運転度を算出し、運転者の管理、指導を行なう資料を出力(表示、印刷等)してもよい。また、上記の記憶された車両の位置データより、分析装置の地図上に走行軌跡を表示し、危険運転範囲内での走行軌跡と危険運転範囲外での走行軌跡が区分して分かる様に出力してもよい。この出力内容を運転者の指導に使用する。同時に、地形や道路形状により上記危険運転度の評価を変更するようにしてもよい。また、車間ではなく、周囲の構造物との距離を計測している可能性のある場所を排除して判定してもよい。
【0052】
また、本発明の車両の安全運転管理システムを次のように構成してもよい。
車間距離を計測する車間センサと、車両の速度を計測する度計測部と、前方を撮影するカメラと、それらの計測・撮影データを同時に記憶する記憶部で構成された車載機と、車載機に記憶された上記データを収集して、運転状態を分析する分析装置(コンピュータ)でシステムを構成する。例えば、速度は車両の速度パルス部から取ってもよい。この場合、速度と車間距離により、危険運転範囲を設定し、危険運転範囲内での走行時間、危険運転範囲外での走行時間、危険運転範囲内での走行回数等により、危険運転度を算出し、運転者の管理、指導を行なう資料を出力(表示、印刷等)してもよい。また、上記の危険運転範囲内の走行中に撮影された画像から、車間距離データが、車間ではなく、周囲の構造物との距離を計測している可能性のある場所を排除して判定してもよい。
【0053】
また、本発明の車両の安全運転管理システムを次のように構成してもよい。
車間距離を計測する車間センサと、車両の速度を計測する速度計測部と、車両の動きを検知するGセンサ、またはジャイロセンサと、それらの計測データを同時に記憶する記憶部で構成された車載機と、車載機に記憶された上記データを収集して、運転状態を分析する分析装置(コンピュータ)でシステムを構成する。例えば、速度は車両の速度パルス部から取ってもよい。この場合、速度と車間距離により、危険運転範囲を設定し、危険運転範囲内での走行時間、危険運転範囲外での走行時間、危険運転範囲内での走行回数等により、危険運転度を算出し、運転者の管理、指導を行なう資料を出力(表示、印刷等)してもよい。また、上記の危険運転範囲内の走行のGセンサ、またはジャイロセンサの出力により、車間距離データが、車問ではなく、周囲の構造物との距離を計測している可能性のある場所を排除して判定してもよい。例えば、Gセンサ、またはジャイロセンサによりカーブを検出し、カーブでは他の構造物との距離を計測している可能性があるので排除する。
【0054】
さらに、本発明の車両の安全運転管理システムにおいて、相対速度と車間距離に基づき、追突の危険性がある範囲内に入った場合、警報を発する機能を入れるとよい。前方車両と周囲の構造物等の識別が難しく、本目的とは異なるので入れなくてもよいが、例えば、警報する車間距離を短くし周囲の構造物等との識別を行なわない構成の場合にはこの機能を入れると良い。また、警報は行なわなく、車間距離の表示のみを行う構成としてもよい。
【0055】
本発明の車両の安全運転管理システムにおいて、分析については次のようにしてもよい。例えば、速度に対する制動距離は車両の性能や積載量、その他の条件により異なるが、時速100Km時に100mの車間距離が安全車間距離として危険な車間距離であるか否かを判定するとよい。あるいは、法定車間距離を基にしてもよい。評価は、速度と安全車間距離の関係を数式化、またはチャート化し、それを超えて走行した時間や回数で判定するとよい。更に、速度に対する車間距離の評価は判定基準を数段階設け、点数制にするとよい。例えば、時速100Kmでの車間距離100mは0点、80m5点、70m10点、60m20点、50m40点、40m80点、30m160点、20m以下は危険運転とするとよい。点数は速度の関数にするとよい。所定の速度以上の走行時のみを管理してもよい。また横軸を走行時間、縦軸を上記点数でグラフ化するとよい。運転者の癖や車間距離に対する注意度が分かるので運転者の教育に使うことができる。評価と教育を常に行なう事により安全な車間距離を取って運転する癖にすれば追突事故を減少できる。
【0056】
交通事故の多くに追突事故がある。特に大型トラックやバス等では大きな事故になる。上記のようなシステムによれば、運送やバス等の事業者は運転者の管理、教育等により事故を減少できれば利益にも繋がる。特に、追突事故防止の為の運転者管理、教育の為のシステムを提供できる。追突事故の主な要因に、短い車間距離、居眠り運転、脇見運転等があるが、これらは、運転者の適正、癖、疲労度等も関係し、事業者の管理、教育により減少できる。
【符号の説明】
【0057】
1、21、31、51 情報処理装置
3、23、33、53 分析判定
5、15 車載用電子機器
5a 本体
5b、15a、17a SDメモリカード用スロット
6 SDメモリカード
17 パーソナルコンピュータ
5c、17b、28、38、58 表示部
9 記憶装置
11 車間センサ
12 速度計
13 GPS受信機
14 車載カメラ
16 ジャイロセンサ
25、35、55 前方確認情報
26、36、56 前方の可能性判断
27、37、57 記憶部
【特許請求の範囲】
【請求項1】
車両の前方に存在する物体との距離に関する情報を取得する手段と、前記距離とは異なる車両の走行状況に関する情報を取得する手段と、前記車両の運転状態を分析する分析手段とを備え、前記分析手段は、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて、前記車両の運転状態が危険状態か否かを分析することを特徴とする車両の安全運転管理システム。
【請求項2】
前記車両の走行状況に関する情報として、前記車両の前方に存在する物体との距離が車間距離でなく周囲の構造物との間の距離である可能性があるか否かを判断するための前方確認情報を備え、前記分析手段は、前記前方確認情報に基づいて前記可能性があると判断した場合、当該可能性を加味して前記分析を行うことを特徴とする請求項1に記載の車両の安全運転管理システム。
【請求項3】
前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係を特定可能に記憶する記憶手段を備え、前記分析手段は、前記記憶手段に記憶された前記距離に関する情報と前記車両の走行状況に関する情報とに基づいて、前記分析を行うことを特徴とする請求項2に記載の車両の安全運転管理システム。
【請求項4】
前記分析手段は、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて、前記車両の走行状態を、前記運転状態が危険状態にない安全走行状態と、前記運転状態が危険状態にある危険走行状態とに分別し、その分別結果を出力することを特徴とする請求項2または請求項3に記載の車両の安全運転管理システム。
【請求項5】
前記分析手段は、前記危険走行状態として、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて危険運転範囲を設定し、前記危険運転範囲内の走行状況と前記危険運転範囲外の走行状況とに基づいて前記分別結果を出力することを特徴とする請求項4に記載の安全運転管理システム。
【請求項6】
前記車両の走行状況に関する情報として前記車両の位置に関する情報を備え、前記前方確認情報として前記車両が走行する道路が敷設された地形または前記道路の形状に関する情報を備え、前記分析手段は、前記車両の位置に関する情報と前記地形または前記道路の形状に関する情報を加味して前記分析を行うことを特徴とする請求項4または請求項5に記載の車両の安全運転管理システム。
【請求項7】
前記前方確認情報としてカメラにより撮影された画像情報を備え、前記分析手段は、前記画像情報を加味して前記分析を行うことを特徴とする請求項4から請求項6のいずれか1項に記載の安全運転管理システム。
【請求項8】
前記前方確認情報として加速度センサまたはジャイロセンサによる計測情報を備え、前記分析手段は、前記計測情報を加味して前記分析を行うことを特徴とする請求項4から請求項7のいずれか1項に記載の安全運転管理システム。
【請求項9】
前記分析手段は、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて、前記危険走行状態を危険度に応じた2以上の状態にさらに分別し、その分別結果を出力することを特徴とする請求項4から請求項8のいずれか1項に記載の車両の安全運転管理システム。
【請求項10】
地図を表示可能な表示部を備え、前記分析手段は、前記車両の走行軌跡を安全走行状態と危険走行状態、または2以上の危険走行状態に分別して前記地図上に表示することを特徴とする請求項4から請求項9のいずれか1項に記載の車両の安全運転管理システム。
【請求項11】
コンピュータを、請求項1から請求項10のいずれか1項に記載の車両の安全運転管理システムとして機能させるためのプログラム。
【請求項1】
車両の前方に存在する物体との距離に関する情報を取得する手段と、前記距離とは異なる車両の走行状況に関する情報を取得する手段と、前記車両の運転状態を分析する分析手段とを備え、前記分析手段は、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて、前記車両の運転状態が危険状態か否かを分析することを特徴とする車両の安全運転管理システム。
【請求項2】
前記車両の走行状況に関する情報として、前記車両の前方に存在する物体との距離が車間距離でなく周囲の構造物との間の距離である可能性があるか否かを判断するための前方確認情報を備え、前記分析手段は、前記前方確認情報に基づいて前記可能性があると判断した場合、当該可能性を加味して前記分析を行うことを特徴とする請求項1に記載の車両の安全運転管理システム。
【請求項3】
前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係を特定可能に記憶する記憶手段を備え、前記分析手段は、前記記憶手段に記憶された前記距離に関する情報と前記車両の走行状況に関する情報とに基づいて、前記分析を行うことを特徴とする請求項2に記載の車両の安全運転管理システム。
【請求項4】
前記分析手段は、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて、前記車両の走行状態を、前記運転状態が危険状態にない安全走行状態と、前記運転状態が危険状態にある危険走行状態とに分別し、その分別結果を出力することを特徴とする請求項2または請求項3に記載の車両の安全運転管理システム。
【請求項5】
前記分析手段は、前記危険走行状態として、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて危険運転範囲を設定し、前記危険運転範囲内の走行状況と前記危険運転範囲外の走行状況とに基づいて前記分別結果を出力することを特徴とする請求項4に記載の安全運転管理システム。
【請求項6】
前記車両の走行状況に関する情報として前記車両の位置に関する情報を備え、前記前方確認情報として前記車両が走行する道路が敷設された地形または前記道路の形状に関する情報を備え、前記分析手段は、前記車両の位置に関する情報と前記地形または前記道路の形状に関する情報を加味して前記分析を行うことを特徴とする請求項4または請求項5に記載の車両の安全運転管理システム。
【請求項7】
前記前方確認情報としてカメラにより撮影された画像情報を備え、前記分析手段は、前記画像情報を加味して前記分析を行うことを特徴とする請求項4から請求項6のいずれか1項に記載の安全運転管理システム。
【請求項8】
前記前方確認情報として加速度センサまたはジャイロセンサによる計測情報を備え、前記分析手段は、前記計測情報を加味して前記分析を行うことを特徴とする請求項4から請求項7のいずれか1項に記載の安全運転管理システム。
【請求項9】
前記分析手段は、前記距離に関する情報と前記車両の走行状況に関する情報とこれら両者の関係に基づいて、前記危険走行状態を危険度に応じた2以上の状態にさらに分別し、その分別結果を出力することを特徴とする請求項4から請求項8のいずれか1項に記載の車両の安全運転管理システム。
【請求項10】
地図を表示可能な表示部を備え、前記分析手段は、前記車両の走行軌跡を安全走行状態と危険走行状態、または2以上の危険走行状態に分別して前記地図上に表示することを特徴とする請求項4から請求項9のいずれか1項に記載の車両の安全運転管理システム。
【請求項11】
コンピュータを、請求項1から請求項10のいずれか1項に記載の車両の安全運転管理システムとして機能させるためのプログラム。
【図1】



【図2】
【図3】

【図4】
【図5】
【図6】

【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−101505(P2013−101505A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2011−244960(P2011−244960)
【出願日】平成23年11月8日(2011.11.8)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願日】平成23年11月8日(2011.11.8)
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
[ Back to top ]