
車両用ブレーキ装置
【課題】フィードバック制御からフィードフォワード制御への切替え時に、ホイールシリンダ液圧が急に下がらないように制御して運転者がブレーキ操作時に違和感を感じないようにすること。
【解決手段】モータ回転数推定部132で、FB制御からFF制御への切替え時に、FB制御目標回転数よりも余裕回転数だけ高いFF制御目標回転数に応じて徐々に上がるモータ回転数を推定し、流量演算部133で、その推定モータ回転数に応じた液圧ポンプでの汲み上げ流量に応じて徐々に増加する液圧制御弁の通過流量を推定する。制御電流補正演算部134で、電気モータがFF制御目標回転数で回転されて液圧制御弁を通過するブレーキ液が漸増しても、ホイールシリンダ液圧が変化しないように、液圧制御弁に印加する制御電流を演算して制御する。
【解決手段】モータ回転数推定部132で、FB制御からFF制御への切替え時に、FB制御目標回転数よりも余裕回転数だけ高いFF制御目標回転数に応じて徐々に上がるモータ回転数を推定し、流量演算部133で、その推定モータ回転数に応じた液圧ポンプでの汲み上げ流量に応じて徐々に増加する液圧制御弁の通過流量を推定する。制御電流補正演算部134で、電気モータがFF制御目標回転数で回転されて液圧制御弁を通過するブレーキ液が漸増しても、ホイールシリンダ液圧が変化しないように、液圧制御弁に印加する制御電流を演算して制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータ回転数のフィードバック制御中に何らかの原因でモータ回転数が検出できずフィードバック制御が行えなくなった際に、フィードフォワード制御に切替えて回転制御を継続する車両用ブレーキ装置に関する。
【背景技術】
【0002】
従来から、例えば、特許文献1に記載の液圧ブレーキ装置および回生ブレーキ装置を備えた車両用ブレーキ装置が知られている。液圧ブレーキ装置は、マスタシリンダにてブレーキ操作に応じた基礎液圧を発生し、発生した基礎液圧をマスタシリンダと液圧制御弁とを介在した油経路によって連結された各車輪のホイールシリンダに付与し、各車輪に基礎液圧制動力を発生させる。また、制御液圧指令値に応じて電気モータを駆動して液圧制御弁に並設された液圧ポンプを駆動させることにより制御液圧を発生し、発生した制御液圧をホイールシリンダに付与して各車輪に制御液圧制動力を発生させる。回生ブレーキ装置は、ブレーキ操作の状態に対応した回生制動力を車輪の何れかに発生させる。
【0003】
この車両用ブレーキ装置においては、運転者の要求制動力に対して回生制動力が変動して不足した場合、制御液圧制動力により回生制動力の不足を補償するようになっている。すなわち、電気モータを高回転で駆動して液圧ポンプの吐出流量を高めておき、必要な流量分に対して不要な流量分のブレーキ液を液圧制御弁からマスタシリンダ側に逃がすことにより制御液圧を調整している。この車両用ブレーキ装置によれば、要求制動力に対して回生制動力が不足する事態に対し、必要に応じて応答性よく対応することができる。
【0004】
また、特許文献2には、モータ回転数を制御してポンプ吐出流量を変化させることにより、制御液圧を制御する装置を備えた車両用ブレーキ装置が開示されている。この車両用ブレーキ装置によれば、ブレーキの速い踏み込み時等でブレーキ液圧の消費油量が多く必要な場合には、モータ回転数を高めてポンプ吐出流量を多くして応答性を高くすることができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−21745号公報
【特許文献2】特開平10−119748号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
液圧ブレーキ装置および回生ブレーキ装置を備えた車両用ブレーキ装置では、通常ブレーキ領域で頻繁に作動する制御液圧を発生する液圧ポンプを駆動する電気モータの耐久性が重要である。特許文献1に記載の車両用ブレーキ装置においては、電気モータを高回転で駆動しなければならず、電気モータが早期に寿命に達するおそれがある。一方、特許文献2に記載の車両用ブレーキ装置においては、ポンプ吐出流量を変化させるためにモータ回転数を制御するので、電気モータの耐久性を向上させることは可能である。しかし、ブレーキペダルの踏み込み程度が刻々変わることで液圧ポンプに掛かる負荷が変動する状況で、モータ回転数をどのように制御すべきかについては提案されていない。
【0007】
モータは高寿命化を図るため回転数を低下させることが有効であり、このため特許文献2では、モータ回転数を検出してモータへの印加電圧を適正に補正するフィードバック(FB)制御が行われている可能性がある。このフィードバック制御は、検出されたモータの回転数が、FB制御目標回転数に一致するように行われる。また、特許文献2には記載されていないが、何らかの原因でモータ回転数が検出できずフィードバック制御が行えなくなった際に、フィードフォワード(FF)制御に切替えて回転制御を継続することが考えられている。このときのFF制御目標回転数は、推定回転数に推定誤差があっても回転数不足により車輪の制動力に不足が生じないように、FB制御目標回転数よりも高く設定される。このため、フィードバック制御からフィードフォワード制御に切替えられた際に、モータ回転数の指令値が図17(b)に矢印r1で示すようにFF制御目標回転数に急に高くなる。この高くなるモータ回転数に追従させるために、マスタシリンダとホイールシリンダとの間に接続された液圧制御弁の制御電流{図17(c)に矢印i1で示す}を急に下げて対応すると、液圧制御弁が急に開口する。しかし、モータはその時定数に従ってFF制御目標回転数となり、ポンプは、モータがFF制御目標回転数になっても、その汲み上げ流量は急には追従しない。このため、急に開口した液圧制御弁から今まで以上の流量のブレーキ液がリリーフされるので、図17(d)に曲線wc1で示すようにホイールシリンダ液圧が急に下がってしまう。
【0008】
このようにフィードバック制御からフィードフォワード制御に切替えた場合、ポンプの汲み上げ流量と液圧制御弁の開口度合にずれが生じるため、ホイールシリンダのブレーキ液圧がスムーズに変化せず、運転者がブレーキ操作時に違和感を感じるという問題がある。
【0009】
本発明は、このような事情に鑑みてなされたものであり、フィードバック制御からフィードフォワード制御への切替え時に、ホイールシリンダ液圧が急に下がらないように制御して運転者がブレーキ操作時に違和感を感じないようにすることができる車両用ブレーキ装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するためになされた請求項1に係る発明の構成上の特徴は、ブレーキ操作に応じたマスタシリンダ液圧を発生するマスタシリンダと、各車輪に設けられ、ホイールシリンダに前記マスタシリンダからブレーキ液が供給されることによって前記車輪に制動力を付与する車輪ブレーキ装置と、前記マスタシリンダと前記ホイールシリンダとの間に接続された液圧制御弁と、前記液圧制御弁と前記ホイールシリンダとの間に吐出ポートが連通され、前記マスタシリンダと前記液圧制御弁との間に吸入ポートが連通された液圧ポンプと、前記液圧ポンプを駆動する電気モータと、前記電気モータのモータ回転数を検出する回転数検出装置と、前記電気モータのFB制御目標回転数に応じた制御電力を、前記回転数検出装置で検出された前記モータ回転数と前記電気モータのFB制御目標回転数との差に応じて補正して前記電気モータの駆動回路に供給するフィードバック制御回路と、前記電気モータのFF制御目標回転数に応じた制御電力を前記駆動回路に供給するフィードフォワード制御回路と、前記電気モータを前記フィードバック制御回路によってFB制御目標回転数で回転させて前記液圧ポンプから目標流量のブレーキ液を前記液圧制御弁に循環させるとともに、前記液圧制御弁に制御電流を供給することによって、前記ホイールシリンダに生じるホイールシリンダ液圧が前記マスタシリンダ液圧より制御液圧だけ高くなるように制御する制御液圧発生制御装置と、前記回転数検出装置の異常が異常検出装置によって検出されると、前記電気モータを前記フィードフォワード制御回路によって前記FB制御目標回転数より余裕回転数だけ高いFF制御目標回転数で回転させるとともに、前記電気モータが前記余裕回転数だけ高いFF制御目標回転数で回転されることにより前記液圧制御弁を通過する前記ブレーキ液が漸増させ、前記ホイールシリンダ液圧が変化しないように、前記液圧制御弁に供給する前記制御電流を漸次変化させる異常時制御液圧発生制御装置と、を備えることにある。
【0011】
請求項2に係る発明の構成上の特徴は、請求項1において、回生制動力を前記車輪に発生させる回生ブレーキ装置と、前記ブレーキ操作量に応じた要求制動力を演算する要求制動力演算手段と、前記マスタシリンダ液圧によって発生する基礎液圧制動力を演算する基礎液圧制動力演算手段と、前記要求制動力から前記基礎液圧制動力を減算して要求回生制動力を演算する要求回生制動力演算手段と、前記要求回生制動力と前記回生ブレーキ装置が現在発生可能な現回生制動力との差に基づいて前記制御液圧を設定する制御液圧設定手段と、前記制御液圧の変化に基づいて前記ホイールシリンダに供給されるブレーキ液量及び前記液圧制御弁の作動に必要なリリーフ流量に基づいて前記電気モータのFB制御目標回転数を設定するFB制御目標回転数設定手段と、を備えることにある。
【0012】
請求項3に係る発明の構成上の特徴は、請求項1又は2において、前記電気モータは、ブラシ及びコミュテータを介して直流電流を供給されることにより回転するブラシ付き直流電気モータであり、前記回転数検出装置は、前記ブラシと前記コミュテータとの間の断続によって前記電気モータへの供給電流に単位時間に発生するリップル成分を計数することにより前記電気モータのモータ回転数を検出することにある。
【0013】
請求項4に係る発明の構成上の特徴は、請求項1乃至3のいずれか一項において、前記電気モータが前記余裕回転数だけ高いFF制御目標回転数で回転されることにより前記液圧制御弁を通過する前記ブレーキ液が漸増する時定数を、少なくとも前記液圧ポンプの負荷を考慮して演算したモータ応答の時定数と、少なくとも前記液圧ポンプから前記ブレーキ液を前記液圧制御弁に循環させる配管回路の流路抵抗及び前記ブレーキ液の粘性を考慮して演算した流量応答の時定数に基づいて演算することにある。
【発明の効果】
【0014】
請求項1に係る発明によれば、回転数検出装置の異常時にフィードバック制御からフィードフォワード制御へ切替えた場合、電気モータが余裕回転数だけ高いFF制御目標回転数で回転されることにより液圧制御弁を通過するブレーキ液を漸増させ、それでも、ホイールシリンダ液圧が変化しないように、液圧制御弁に供給する制御電流を漸次変化させるようにしたので、ブレーキ操作時にホイールシリンダ液圧が低下することを防止でき、運転者がブレーキ操作時に違和感を感じるということを防ぐことが出来る。
【0015】
請求項2に係る発明によれば、要求回生制動力と現回生制動力との差に基づいて制御液圧を設定し、この制御液圧の変化に応じたホイールシリンダへのブレーキ液量及び液圧制御弁の作動に必要なリリーフ流量に基づいて電気モータのFB制御目標回転数を設定する場合でも、上記同様に、運転者がブレーキ操作時に違和感を感じるということを無くすことが出来る。
【0016】
請求項3に係る発明によれば、電気モータをブラシ付き直流電気モータとし、供給電流のリップルを計数してモータ回転数を検出する回転数検出装置を用いることによりコスト低減を図った場合でも、回転数検出装置の異常時にフィードバック制御からフィードフォワード制御へ切替えたときに、液圧制御弁への制御電流を漸次変化させてホイールシリンダ液圧が低下しないようにすることが出来る。
【0017】
請求項4に係る発明によれば、電気モータがFB制御目標回転数よりも余裕回転数だけ高いFF制御目標回転数で回転されることにより液圧制御弁を通過するブレーキ液が漸増する時定数を適正に演算することが出来る。何故ならば、少なくとも液圧ポンプの負荷を考慮して演算したモータ応答の時定数と、少なくとも液圧ポンプからブレーキ液を液圧制御弁に循環させる配管回路の流路抵抗及びブレーキ液の粘性を考慮して演算した流量応答の時定数に基づいて演算するからである。このように液圧制御弁の通過ブレーキ液の漸増時の時定数を適正に演算することができるので、その通過ブレーキ液漸増に応じた液圧制御弁への制御電流を適正に制御して、フィードバック制御からフィードフォワード制御へ切替えたときに、ホイールシリンダ液圧が低下しないようにすることが出来る。
【図面の簡単な説明】
【0018】
【図1】本発明による車両用ブレーキ装置を適用した車両の一実施形態を示す概要図である。
【図2】図1に示す車両用ブレーキ装置の液圧ブレーキ装置を示す図である。
【図3】回生制動力と液圧制動力とのすり替え時の関係図である。
【図4】本実施形態の車両用ブレーキ装置の作動を示すフローチャートである。
【図5】図4に示す必要制御液圧演算サブルーチンを説明するためのフローチャートである。
【図6】図4に示す必要液量変換サブルーチンを説明するためのフローチャートである。
【図7】図4に示す必要流量演算サブルーチンを説明するためのフローチャートである。
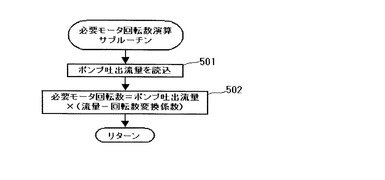
【図8】図4に示す必要モータ回転数演算サブルーチンを説明するためのフローチャートである。
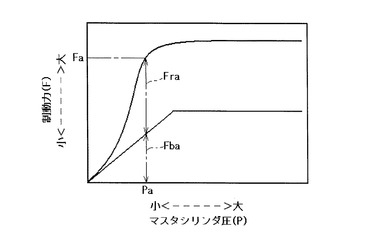
【図9】ブレーキ操作に応じて発生するマスタシリンダ圧と、そのブレーキ操作量に応じた全制動力(基礎液圧制動力と回生制動力と必要な場合には制御液圧制動力との和で表される制動力)との関係を示す図である。
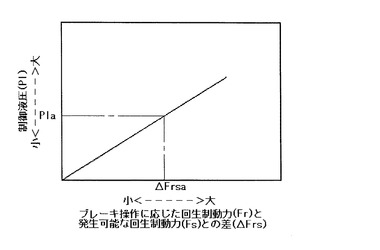
【図10】ブレーキ操作量に応じた回生制動力と回生ブレーキ装置が発生可能な回生制動力との差と、電気モータの駆動により液圧ポンプから吐出されるブレーキ液による液圧制御弁の制御液圧との関係を示す図である。
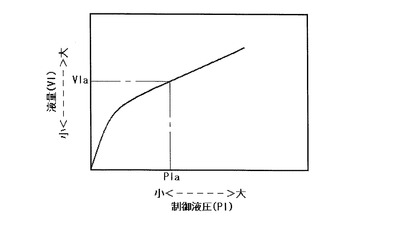
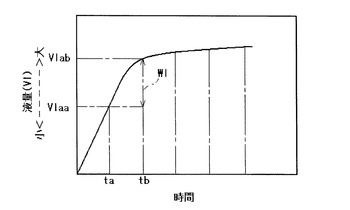
【図11】電気モータの駆動により液圧ポンプから吐出されるブレーキ液による液圧制御弁の制御液圧と、そのブレーキ液が供給されるホイールシリンダにおける累積の液量との関係を示す図である。
【図12】図11の累積の液量の変動を示す図である。
【図13】本実施形態の車両用ブレーキ装置における制御液圧発生制御装置の構成を示すブロック図である。
【図14】本実施形態の車両用ブレーキ装置の電気モータの回転数検出時の動作を説明するためのタイミングチャートである。
【図15】上記制御液圧発生制御装置を有するブレーキECUのCPUがフィードバック制御及びフィードフォワード制御を行う際のロジックブロック図である。
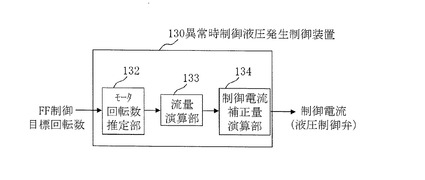
【図16】本実施形態の車両用ブレーキ装置における異常時制御液圧発生制御装置の構成を示すブロック図である。
【図17】フィードバック制御からフィードフォワード制御への切替え後のモータ回転数、液圧制御弁通過流量、液圧制御弁への制御電流、ホイールシリンダ液圧の時間的な変化を示す図である。
【発明を実施するための形態】
【0019】
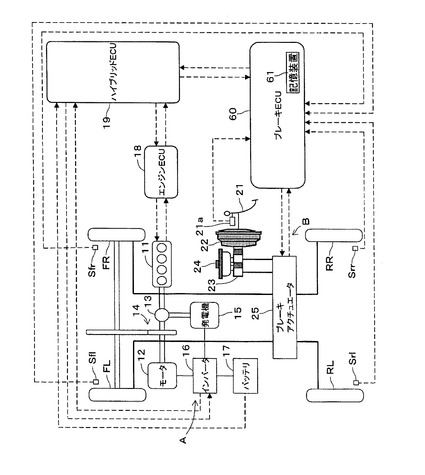
以下、本発明に係る車両用ブレーキ装置の一実施の形態をハイブリッド車に適用した場合について図面を参照して説明する。図1に示すように、車両用ブレーキ装置は、ハイブリッド車に適用されるように構成されたものであり、液圧ブレーキ装置Bと、回生ブレーキ装置Aと、液圧ブレーキ装置Bおよび回生ブレーキ装置Aを協調制御するブレーキECU(電子制御ユニット)60と、ブレーキECU60からの要求値に応じてインバータ16を介してハイブリッド車の駆動源であるモータ12を制御するハイブリッドECU(電子制御ユニット)19等とを備えている。
【0020】
ハイブリッド車は、ハイブリッドシステムによって駆動輪、例えば左右前輪FL,FRを駆動させる車両である。ハイブリッドシステムは、エンジン11およびモータ12の2種類の動力源を組み合わせて使用するパワートレーンである。ハイブリッドシステムには、エンジン11およびモータ12の双方で車輪を直接駆動する方式であるパラレルハイブリッドシステム、およびモータ12によって車輪が駆動され、エンジン11はモータ12への電力供給源として作用するシリアルハイブリッドシステムがあるが、本実施形態のハイブリッド車には、パラレルハイブリッドシステムが装備されている。
【0021】
このパラレルハイブリッドシステムを搭載したハイブリッド車において、エンジン11の駆動力は、動力分割機構13および動力伝達機構14を介して駆動輪(本実施形態では左右前輪FL,FR)に伝達されるようになっており、モータ12の駆動力は、動力伝達機構14を介して駆動輪に伝達されるようになっている。動力分割機構13は、エンジン11の駆動力を車両駆動力と発電機駆動力に適切に分割するものである。動力伝達機構14は、走行条件に応じてエンジン11およびモータ12の駆動力を適切に統合して駆動輪に伝達するものである。動力伝達機構14はエンジン11とモータ12の伝達される駆動力比を0:100〜100:0の間で調整している。この動力伝達機構14は変速機能を有している。
【0022】
エンジン11はエンジンECU(電子制御ユニット)18によって制御されており、エンジンECU18は後述するハイブリッドECU19からのエンジン出力要求値に従って電子制御スロットル(図示省略)に開度指令を出力し、エンジン11の回転数を調整する。モータ12は、エンジン11の出力を補助し駆動力を高めるものであり、一方車両の制動時には発電を行いバッテリ17を充電するものである。発電機15は、エンジン11の出力により発電を行うものであり、エンジン始動時のスタータの機能を有する。これらモータ12および発電機15は、インバータ16にそれぞれ電気的に接続されている。インバータ16は、直流電源としてのバッテリ17に電気的に接続されており、モータ12および発電機15から入力した交流電圧を直流電圧に変換してバッテリ17に供給したり、逆にバッテリ17からの直流電圧を交流電圧に変換してモータ12および発電機15へ出力したりするものである。
【0023】
回生ブレーキ装置Aは、モータ12、インバータ16およびバッテリ17等から構成されている。この回生ブレーキ装置Aは、ブレーキ操作状態に基づいた回生制動力を各車輪FL,FR,RL,RRの何れか(本実施形態では駆動源であるモータ12によって駆動される左右前輪FL,FR)に発生させるものである。ブレーキ操作状態は、ブレーキペダル21の操作状態であり、例えばブレーキペダル21への踏力に相関するマスタシリンダ圧、ブレーキペダル21のストローク量、ブレーキペダル21への踏力などである。ブレーキ操作状態検出手段は、このブレーキ操作状態を検出するものであり、マスタシリンダ圧を検出する圧力センサP、ブレーキペダル21のストローク量を検出するペダルストロークセンサ21aなどである。
【0024】
ハイブリッドECU19には、インバータ16が互いに通信可能に接続されている。ハイブリッドECU19は、アクセル開度およびシフトポジション(図示しないシフトポジションセンサから入力したシフト位置信号から算出する)から必要なエンジン出力、電気モータトルクおよび発電機トルクを導出し、その導出したエンジン出力要求値をエンジンECU18に送信してエンジン11の駆動力を制御する。ハイブリッドECU19は、導出した電気モータトルク要求値および発電機トルク要求値に従って、インバータ16を通してモータ12および発電機15を制御する。また、ハイブリッドECU19はバッテリ17が接続されており、バッテリ17の充電状態、充電電流などを監視している。さらに、ハイブリッドECU19は、アクセルペダル(図示省略)に組み付けられて車両のアクセル開度を検出するアクセル開度センサ(図示省略)も接続されており、アクセル開度センサからアクセル開度信号を入力している。
【0025】
液圧ブレーキ装置Bは、車輪ブレーキ装置(基礎液圧制動力発生装置)と、ブレーキアクチュエータ(制御液圧制動力発生装置)25等とから構成されている。液圧ブレーキ装置Bは、直接各車輪FL,FR,RL,RRに液圧制動力を付与して車両を制動させる。車輪ブレーキ装置は、エンジン11の吸気負圧をダイヤフラムに作用させてブレーキペダル21の踏み込み操作により生じるブレーキ操作力を助勢して倍力(増大)する倍力装置である負圧式ブースタ22と、負圧式ブースタ22により倍力されたブレーキ操作力(すなわちブレーキペダル21の操作状態)に応じた基礎液圧である液圧(油圧)のブレーキ液(油)を生成してホイールシリンダWC1〜WC4に供給するマスタシリンダ23と、ブレーキ液を貯蔵してマスタシリンダ23にそのブレーキ液を補給するリザーバタンク24とから構成されている。ブレーキアクチュエータ25は、マスタシリンダ23とホイールシリンダWC1〜WC4との間に設けられている。
【0026】
図2に示すように、車輪ブレーキ装置は、ブレーキペダル21の踏み込みによるブレーキ操作状態に対応した基礎液圧をマスタシリンダ23にて発生し、発生した基礎液圧を当該マスタシリンダ23と液圧制御弁31,41をそれぞれ介在した油経路Lf,Lrによって連結された各車輪FL,FR,RL,RRのホイールシリンダWC1,WC2,WC3,WC4に直接付与することにより、各車輪FL,FR,RL,RRに基礎液圧に対応した基礎液圧制動力を発生させる。ブレーキアクチュエータ25は、ブレーキ操作状態に対応して発生される基礎液圧とは独立して液圧ポンプ37,47の駆動と液圧制御弁31,41の制御によって形成される制御液圧を各車輪FL,FR,RL,RRのホイールシリンダWC1,WC2,WC3,WC4に付与することにより各車輪FL,FR,RL,RRに制御液圧制動力を発生させる。
【0027】
液圧ブレーキ装置Bのブレーキ配管系は前後配管方式にて構成されており、マスタシリンダ23の第1および第2液圧室23d、23fは、油経路LrおよびLfにそれぞれ接続されている。油経路Lrは、第1液圧室23dと左右後輪RL,RRのホイールシリンダWC3,WC4とをそれぞれ連通するものであり、油経路Lfは、第2液圧室23fと左右前輪FL,FRのホイールシリンダWC1,WC2とをそれぞれ連通するものである。各ホイールシリンダWC1,WC2,WC3,WC4は、マスタシリンダ23から油経路Lf,Lrを介して液圧(基礎液圧、制御液圧)が供給されると、各ホイールシリンダWC1,WC2,WC3,WC4に対応してそれぞれ設けられた各ブレーキ手段BK1,BK2,BK3,BK4を作動させて各車輪FL,FR,RL,RRに液圧制動力(基礎液圧制動力、制御液圧制動力)を付与する。各ブレーキ手段BK1,BK2,BK3,BK4としては、ディスクブレーキ、ドラムブレーキ等があり、ブレーキパッド、ブレーキシュー等の摩擦部材が車輪に一体のディスクロータ、ブレーキドラム等の回転を規制するようになっている。
【0028】
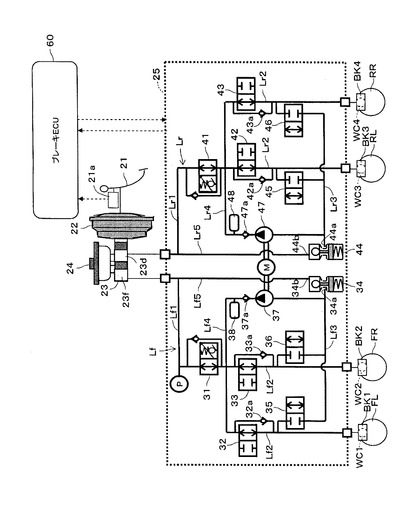
ブレーキアクチュエータ25について図2を参照して詳述する。このブレーキアクチュエータ25は、一般的によく知られているものであり、液圧制御弁31,41、ABS制御弁を構成する増圧制御弁32,33,42,43および減圧制御弁35,36,45,46、調圧リザーバ34,44、液圧ポンプ37,47、電気モータMなどを一つのケースにパッケージすることにより構成されている。液圧制御弁31,41および液圧ポンプ37,47等により制御液圧発生装置を構成している。
【0029】
まず、ブレーキアクチュエータ25の前輪系統の構成について説明する。油経路Lfには、差圧制御弁から構成される液圧制御弁31が備えられている。この液圧制御弁31は、ブレーキECU60により連通状態と差圧状態を切り替え制御されるものである。液圧制御弁31は通常連通状態とされているが、差圧状態にすることによりホイールシリンダWC1,WC2側の油経路Lf2をマスタシリンダ23側の油経路Lf1よりも所定の制御差圧分高い圧力に保持することができる。この制御差圧はブレーキECU60により制御電流に応じて調圧されるようになっている。また、この液圧制御弁31は小径の弁孔を有しており、ホイールシリンダ側の圧力がマスタシリンダ側の圧力より所定圧以上高くなれば、液圧制御弁31の弁孔が絞り孔として作用し、液圧制御弁31のマスタシリンダ側とホイールシリンダ側との間に差圧(駆動差圧)が発生する。
【0030】
油経路Lf2は2つに分岐しており、一方にはABS制御の増圧モード時においてホイールシリンダWC1へのブレーキ液圧の増圧を制御する増圧制御弁32が備えられ、他方にはABS制御の増圧モード時においてホイールシリンダWC2へのブレーキ液圧の増圧を制御する増圧制御弁33が備えられている。これら増圧制御弁32,33は、ブレーキECU60により連通・遮断状態を制御できる2位置弁として構成されている。そして、これら増圧制御弁32,33が連通状態に制御されているときには、マスタシリンダ23の基礎液圧および液圧ポンプ37の駆動と液圧制御弁31の制御によって形成される制御液圧の少なくとも一方を各ホイールシリンダWC1,WC2に加えることができる。また、増圧制御弁32,33は減圧制御弁35,36および液圧ポンプ37とともにABS制御を実行することができる。
【0031】
なお、ABS制御が実行されていないノーマルブレーキの際には、これら増圧制御弁32,33は常時連通状態に制御されている。また、増圧制御弁32,33には、それぞれ安全弁32a,33aが並列に設けられており、ABS制御時においてブレーキペダル21を離したとき、それに伴ってホイールシリンダWC1,WC2側からのブレーキ液をリザーバタンク24に戻すようになっている。
【0032】
また、増圧制御弁32,33と各ホイールシリンダWC1,WC2との間における油経路Lf2は、油経路Lf3を介して調圧リザーバ34のリザーバ孔34aに連通されている。油経路Lf3には、ブレーキECU60により連通・遮断状態を制御できる減圧制御弁35,36がそれぞれ配設されている。これらの減圧制御弁35,36はノーマルブレーキ状態(ABS非作動時)では常時遮断状態とされ、また、適宜連通状態として油経路Lf3を通じて調圧リザーバ34へブレーキ液を逃がすことにより、ホイールシリンダWC1,WC2におけるブレーキ液圧を制御し、車輪がロック傾向にいたるのを防止できるように構成されている。
【0033】
さらに、液圧制御弁31と増圧制御弁32,33との間における油経路Lf2と調圧リザーバ34のリザーバ孔34aとを結ぶ油経路Lf4には液圧ポンプ37が安全弁37aと共に配設されている。そして、調圧リザーバ34のリザーバ孔34bを油経路Lf1を介してマスタシリンダ23と接続するように油経路Lf5が設けられている。液圧ポンプ37は、ブレーキECU60の指令により電気モータMによって駆動されるものである。液圧ポンプ37は、ABS制御の減圧モード時においては、ホイールシリンダWC1,WC2内のブレーキ液または調圧リザーバ34に貯められているブレーキ液を吸い込んで連通状態である液圧制御弁31を介してマスタシリンダ23に戻している。また、液圧ポンプ37は、ESC制御、トラクションコントロール、ブレーキアシストなどの車両の姿勢を安定に制御するための制御液圧を形成する際においては、差圧状態に切り替えられている液圧制御弁31に制御差圧を発生させるべく、マスタシリンダ23内のブレーキ液を油経路Lf1,Lf5および調圧リザーバ34を介して吸い込んで油経路Lf4,Lf2および連通状態である増圧制御弁32,33を介して各ホイールシリンダWC1,WC2に吐出して制御液圧を付与している。なお、液圧ポンプ37が吐出したブレーキ液の脈動を緩和するために、油経路Lf4の液圧ポンプ37の上流側にはダンパ38が配設されている。
【0034】
また、油経路Lf1には、マスタシリンダ23内のブレーキ液圧であるマスタシリンダ圧を検出する圧力センサPが設けられており、この検出信号はブレーキECU60に送信されるようになっている。なお、圧力センサPは油経路Lr1に設けるようにしてもよい。マスタシリンダ圧はブレーキ操作状態の一つである。他のブレーキ操作状態としては、ブレーキペダル21のペダルストロークがある。このペダルストロークはブレーキペダル21に付設されているペダルストロークセンサ21aによって検出される。その検出信号はブレーキECU60に送信されるようになっている。
【0035】
さらに、ブレーキアクチュエータ25の後輪系統も前述した前輪系統と同様な構成であり、後輪系統を構成する油経路Lrは油経路Lfと同様に油経路Lr1〜Lr5から構成されている。油経路Lrには液圧制御弁31と同様な液圧制御弁41、および調圧リザーバ34と同様な調圧リザーバ44が備えられている。ホイールシリンダWC3,WC4に連通する分岐した油経路Lr2,Lr2には増圧制御弁32,33と同様な増圧制御弁42,43が備えられ、油経路Lr3には減圧制御弁35,36と同様な減圧制御弁45,46が備えられている。油経路Lr4には、液圧ポンプ37、安全弁37aおよびダンパ38と同様な液圧ポンプ47、安全弁47aおよびダンパ48が備えられている。なお、増圧制御弁42,43には、それぞれ安全弁32a,33aと同様な安全弁42a,43aが並列に設けられている。以上のような構成のブレーキアクチュエータ25により、液圧ポンプ37,47の駆動と液圧制御弁31,41の制御によって形成された制御液圧を各車輪FL,FR,RL,RRのホイールシリンダWC1,WC2,WC3,WC4に付与することにより各車輪FL,FR,RL,RRに制御液圧制動力を発生させることができる。
【0036】
ブレーキECU60は、マイクロコンピュータ(図示省略)を有しており、マイクロコンピュータは、バスを介してそれぞれ接続された入出力インターフェース、CPU、RAMおよびROM(いずれも図示省略)を備えている。ブレーキECU60は、図1に示すように、車輪速度センサSfl,Sfr,Srl,Srr、圧力センサP、各制御弁31,32,33,35,36,41,42,43,45,46,電気モータMに接続されている。車輪速度センサSfl,Sfr,Srl,Srrは、各車輪FL,FR,RL,RRの付近にそれぞれ設けられており、各車輪FL,FR,RL,RRの回転に応じた周波数のパルス信号をブレーキECU60に出力している。
【0037】
CPUは、車両用制動制御プログラムを実行して上記各センサからの検出信号や、ハイブリッドECU19からの実回生実行値に基づき、液圧ブレーキ装置Bの電気モータMを制御するとともに、液圧ブレーキ装置Bの各制御弁31,32,33,35,36,41,42,43,45,46の状態を切り換え制御または通電電流制御しホイールシリンダWC1〜WC4に付与する制御液圧すなわち各車輪FL,FR,RL,RRに付与する制御液圧制動力を制御する。RAMは車両用制動制御プログラムの実行に必要な変数を一時的に記憶するものであり、ROMは車両用制動制御プログラムを記憶するものである。
【0038】
ブレーキECU60は、ハイブリッドECU19に互いに通信可能に接続されており、車両の全制動力が油圧ブレーキだけの車両と同等となるようにモータ12が行う回生ブレーキと油圧ブレーキの協調制御を行っている。具体的には、ブレーキECU60は、運転者の制動要求すなわちブレーキ操作状態に対して、ハイブリッドECU19に全制動力のうち回生ブレーキ装置の負担分である要求回生制動力の出力指令を指令する。ハイブリッドECU19は、入力した要求回生制動力の出力指令に基づいて車速やバッテリ充電状態等を考慮して実際に回生ブレーキとして作用させる実回生実行値を導出しその実回生実行値に相当する回生制動力を発生させるようにインバータ16を介してモータ12を制御するとともに、導出した実回生実行値をブレーキECU60に出力する。
【0039】
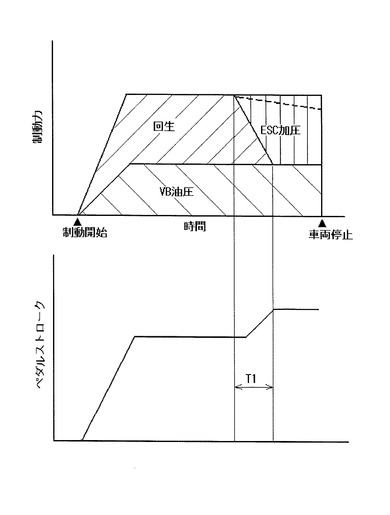
ここで、回生協調時において車両の速度減少に伴って回生制動力(図3にて回生の部分)が減少する場合、車両の全制動力が減少し、最終的に基礎液圧制動力(図3にてVB油圧の部分)のみしか得られない場合が生じる。この場合、回生制動力の代わりに制御液圧制動力を付与することにより(図3にてESC加圧の部分)、回生制動力の減少分を補償して全制動力を一定に維持することができる。このように回生制動力の代わりに制御液圧制動力を付与することを回生制動力と制御液圧制動力のすり替えという。このすり替えは回生制動力を使う限りは車両停止に至る前に必ず行われ、車両が使用されている間に行われる頻度が高いため、液圧ポンプ37,47を駆動する電気モータMは長寿命である必要があり、本実施形態の車両用制動制御プログラムでは、電気モータMの回転数を正常時はFB制御させて耐久性を向上させている。
【0040】
なお、図3において、このすり替えが生じる期間T1では、全制動力は一定であり変化はないが、液圧ポンプ37,47の作動により制御液圧を付与する関係でブレーキペダル21が大きく吸い込まれ、ドライバは違和感を感じるおそれがあった。これを防ぐために、すり替えが開始された時点から車両が停止する時点までの期間にて全制動力すなわち制御液圧制動力を減少させる制御(図3にてESC加圧の点線部分)を行うのが好ましい。これによれば、すり替え期間において発生させるべき制御液圧制動力を前述した場合と比較して小さく抑えることができるので、ブレーキペダル21の吸い込まれる量をドライバが感じない程度に抑制することができ、車両減速度の変動量もドライバが感じない程度に抑制することができる。
【0041】
ブレーキECU60は、記憶装置61を備えており、この記憶装置61には、車両用制動制御プログラムの実行に必要な例えば図9〜13に示すマップ、テーブルまたは演算式が記憶されている。図9は、ブレーキ操作に応じて発生するマスタシリンダ圧Pと、そのブレーキ操作量に応じた全制動力(基礎液圧制動力と回生制動力と必要な場合には制御液圧制動力との和で表される制動力)Fとの関係を示す。なお、マスタシリンダ圧に代えてブレーキペダル21のストロークと要求制動力との関係を示すマップ、テーブルまたは演算式を記憶するようにしてもよい。
【0042】
図11は、ブレーキ操作量に応じた回生制動力Frと回生ブレーキ装置Aが発生可能な回生制動力Fsとの差ΔFrsと、電気モータMの駆動により液圧ポンプ37,47から吐出されるブレーキ液による液圧制御弁31,41の制御液圧Plとの関係を示す。図11は、電気モータMの駆動により液圧ポンプ37,47から吐出されるブレーキ液による液圧制御弁31,41の制御液圧Plと、そのブレーキ液が供給されるホイールシリンダWC1,WC2,WC3,WC4における累積の液量Vlとの関係を示す。図12は、図11の累積の液量Vlの変動を示す。
【0043】
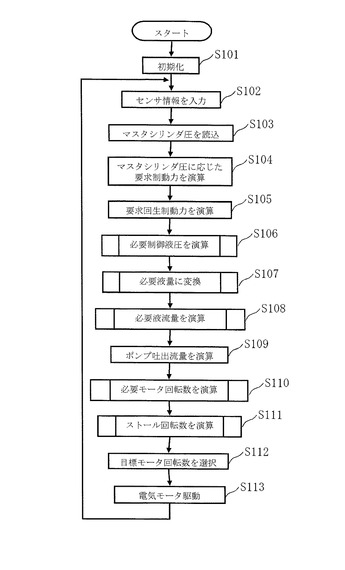
次に、車両用ブレーキ装置の作動を図4〜8フローチャートを参照して説明する。なお、ブレーキECU60は、例えば車両のイグニションスイッチ(図示省略)がオン状態にあるとき、上記フローチャートに対応したプログラムを所定の短時間毎に実行する。図4に示すように、ブレーキECU60は、初期化された後(ステップS101)、マスタシリンダ圧を検出する圧力センサP、ブレーキペダル21のストローク量を検出するペダルストロークセンサ21a等の各種センサ情報を入力する(ステップS102)。
【0044】
ブレーキECU60は、入力した各種センサ情報の中からブレーキ操作状態であるマスタシリンダ圧を読込む(ステップS103)。そして、読込んだマスタシリンダ圧に応じた要求される制動力(以下、要求制動力という)および基礎液圧制動力を演算し、演算した要求制動力および基礎液圧制動力に基づいて、要求される回生制動力(以下、要求回生制動力という)を演算する(ステップS104、本発明の「要求制動力演算手段」、「基礎液圧制動力演算手段」に相当する,105、本発明の「要求回生制動力演算手段」に相当する)。具体的には、予め記憶されている図9に示すブレーキ操作に応じて発生するマスタシリンダ圧Pと、そのブレーキ操作量に応じた全制動力Fとの関係に基づいて、先ず、読込んだマスタシリンダ圧Paに応じた要求制動力Faおよび基礎液圧制動力Fbaを求め、次に、求めた要求制動力Faから基礎液圧制動力Fbaを減算して要求回生制動力Fraを求める。
【0045】
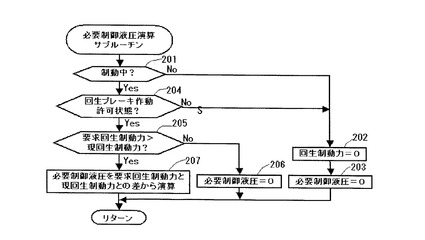
ブレーキECU60は、求めた要求回生制動力を発生させるため、回生ブレーキ装置Aで発生する回生制動力の不足を補償する制御液圧制動力を発生させるために必要な制御液圧(以下、必要制御液圧という)を演算する(ステップS106、本発明の「制御液圧設定手段」に相当する)。具体的には、ブレーキECU60は、図5に示す必要制御液圧演算サブルーチンを実施する。すなわち、ブレーキECU60は、制動中であるか否かを判断し(ステップ201)、制動中でない場合は、回生制動力および必要制御液圧を“0”として(ステップ202,203)、ステップ201にリターンする。一方、ステップ201において、制動中である場合はさらに回生ブレーキ作動許可状態であるか否かを判断し(ステップ204)、回生ブレーキ作動許可状態でない場合は、回生制動力および必要制御液圧を“0”として(ステップ202,203)、ステップ201にリターンする。
【0046】
一方、ステップ204において、回生ブレーキ作動許可状態である場合は、ステップS105で求めた要求回生制動力と回生ブレーキ装置Aが現在発生可能な回生制動力(以下、現回生制動力という)とを比較し、要求回生制動力が現回生制動力よりも大きいか否かを判断する(ステップ205)。そして、要求回生制動力が現回生制動力以下である場合は、要求回生制動力は現回生制動力で充足するため、必要制御液圧を“0”として(ステップ206)、ステップ201にリターンする。
【0047】
この場合、ブレーキECU60は、要求回生制動力をハイブリッドECU19に出力する。そして、ハイブリッドECU19は、要求回生制動力を示す回生要求値を入力し、その値に基づいて車速やバッテリ充電状態等を考慮して回生制動力を発生させるようにインバータ16を介してモータ12を制御するとともに、現回生制動力を示す現回生実行値をブレーキECU60に出力する。このとき、車輪FL,FR,RL,RRには、基礎液圧制動力に回生制動力のみが上乗せされて付与される。
【0048】
一方、ステップ205において、要求回生制動力が現回生制動力よりも大きい場合は、要求回生制動力と現回生制動力との差に基づいて、必要制御液圧を求め(ステップ207)、ステップ201にリターンする。具体的には、要求回生制動力Fraと現回生制動力Fsaとの差ΔFrsaを求め、予め記憶されている図11に示すブレーキ操作量に応じた回生制動力Frと回生ブレーキ装置Aが発生可能な回生制動力Fsとの差ΔFrsと、電気モータMの駆動により液圧ポンプ37,47から吐出されるブレーキ液による液圧制御弁31,41の制御液圧Plとの関係に基づいて、必要制御液圧Plaを求める。
【0049】
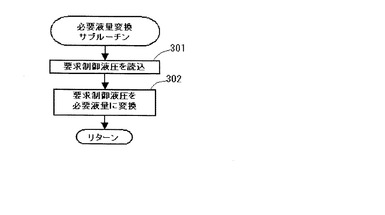
図4に戻って、ブレーキECU60は、ステップ207で求めた必要制御液圧を、回生ブレーキ装置Aで発生する回生制動力の不足を補償する制御液圧制動力を発生させるために必要な液量(以下、必要液量という)に変換する(ステップS107)。具体的には、ブレーキECU60は、図6に示す必要液量変換サブルーチンを実施する。すなわち、ブレーキECU60は、必要制御液圧を読込み(ステップ301)、予め記憶されている図11に示す電気モータMの駆動により液圧ポンプ37,47から吐出されるブレーキ液による液圧制御弁31,41の制御液圧Plと、そのブレーキ液が供給されるホイールシリンダWC1,WC2,WC3,WC4における累積の液量Vlとの関係に基づいて、求めた必要制御液圧Plaを必要液量Vlaに変換し(ステップ302)、ステップ301にリターンする。
【0050】
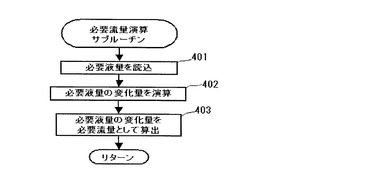
図4に戻って、ブレーキECU60は、ステップ302で変換した必要液量に基づいて必要流量を演算する(ステップS108)。具体的には、ブレーキECU60は、図7に示す必要液流量演算サブルーチンを実施する。すなわち、図12に示すように、ブレーキECU60は、所定時間毎、例えば時点taの必要液量Vlaaと時点tbの必要液量Vlabを読込み(ステップ401)、所定時間tb−taにおける必要液量の変化量Vlab−Vlaaを演算する(ステップ402)。そして、求めた必要液量の変化量Vlab−Vlaaを必要流量Wlとし(ステップ403)、ステップ401にリターンする。
【0051】
図4に戻って、ブレーキECU60は、ステップ403で求めた必要流量に基づいて液圧ポンプ37,47の吐出流量を演算する(ステップS109)。具体的には、ブレーキECU60は、必要流量Wlに液圧制御弁31,41の作動に必要なリリーフ流量Wrを加算してポンプ吐出流量(Wl+Wr)とする。ブレーキECU60は、求めたポンプ吐出流量に基づいて電気モータMの必要モータ回転数を演算する(ステップS110、本発明の「FB制御目標回転数設定手段」に相当する)。具体的には、ブレーキECU60は、図8に示す必要モータ回転数演算サブルーチンを実施する。すなわち、ブレーキECU60は、ポンプ吐出流量(Wl+Wr)を読込み(ステップ501)、読込んだポンプ吐出流量(Wl+Wr)に流量−回転数変換係数kを乗算して電気モータMの必要モータ回転数k(Wl+Wr)とし(ステップ502)、ステップ501にリターンする。この流量−回転数変換係数kは、電気モータMの1回転当りの液圧ポンプ37,47のポンプ吐出流量を表す係数である。
【0052】
図4に戻って、ブレーキECU60は、電気モータMがストールしない最低必要回転数(以下、ストール回転数という)を演算する(ステップS111)。
【0053】
ここで、液圧ポンプ37,47の回転は、電気モータMの回転と相関関係にあり、制御液圧と制御液流量との乗算値で表される液圧ポンプ37,47がする仕事量(負荷)は、電気モータMがする仕事量(負荷)と相関関係にある。液圧ポンプ37,47における制御液圧と制御液流量との乗算値は、電気モータMの駆動により液圧ポンプ37,47に掛かる負荷と等価である。そして、電気モータMがする仕事量は、電気モータMがストールしない最低必要回転数と相関関係にある。よって、電気モータMの駆動により液圧ポンプ37,47に掛かる負荷は、電気モータMのストール回転数を、電気モータMの駆動により液圧ポンプ37,47に掛かる負荷を考慮して演算することができる。
【0054】
図4に戻って、ブレーキECU60は、ステップ502で求めた必要モータ回転数とストール回転数とを比較し、回転数が大きい方を目標回転数として選択する(ステップS112)。そして、選択した目標回転数に基づいて電気モータMを駆動し(ステップS113)、ステップS102に戻って上述の処理を繰り返す。液圧ブレーキ装置Bは、マスタシリンダ圧に応じた基礎液圧制動力、および目標回転数に応じた制御液圧制動力を付与し、回生ブレーキ装置Aは、現回生制動力を付与する。これにより、車輪には基礎液圧制動力に制御液圧制動力および回生制動力を上乗せした全制動力が付与されることになる。
【0055】
次に、ブレーキECU60が電気モータMのフィードバック制御を行う際の動作を説明する。ブレーキECU60は、図13に示す制御液圧発生制御装置100を備える。
【0056】
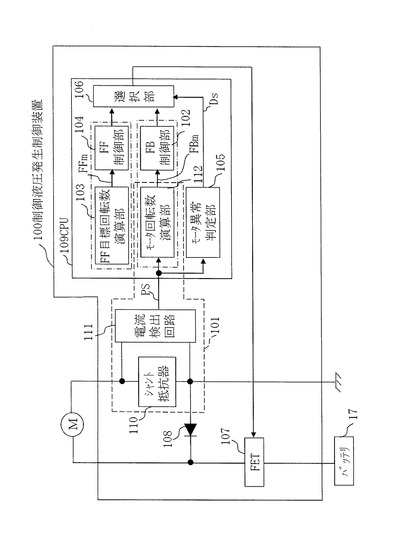
制御液圧発生制御装置100は、回転数検出装置101と、FB制御部102と、FF制御目標回転数演算部103と、FF制御部104と、モータ異常判定部105と、選択部106と、FET(Field Effect Transistor)107と、電流逆流防止用のダイオード108とを備えて構成されている。回転数検出装置101は、シャント抵抗器110と、電流検出回路111と、モータ回転数演算部112とを備えて構成されている。また、モータ回転数演算部112、FB制御部102、FF制御目標回転数演算部103、FF制御部104、モータ異常判定部105及び選択部106は、ブレーキECU60のCPU109によるソフトウエアにより構成されている。
【0057】
電気モータMは、その配線の一端がモータ駆動回路としてのFET107のソース−ドレイン間を介してバッテリ17に接続されており、他端がシャント抵抗器110を介して接地されている。電流検出回路111は、シャント抵抗器110の両端の電流を検出することにより電気モータMの負荷電流を検出し、この検出電流に応じて波形成形したパルス波形信号PSをモータ回転数演算部112及びモータ異常判定部105へ出力する。モータ回転数演算部112は、入力されるパルス波形信号PSから電気モータMの回転数を演算し、この演算されたモータ回転数FBm[rpm]をFB制御部102へ出力する。
【0058】
但し、電気モータMは、例えばブラシ及びコミュテータを介してバッテリ17からの直流電流が供給されることにより回転するブラシ付き直流電気モータである。このブラシ付き直流電気モータの場合、回転数検出装置101は、ブラシとコミュテータとの間の断続によって電気モータMへの供給電流に単位時間に発生するリップル成分を計数することによりモータ回転数FBmを検出する。
【0059】
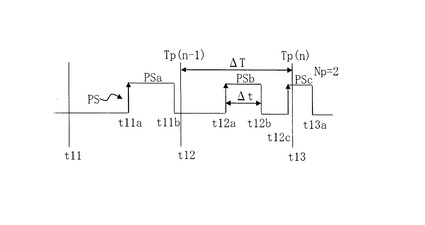
次に、そのモータ回転数FBmの演算について図14を参照して説明する。まず、電流検出回路111からパルス波形PSa,PSb,PScを有するパルス波形信号PSが出力されているとする。モータ回転数演算部112は、そのパルス波形信号PSの立ち上がりエッジを例えば時刻t12〜t13に示す一定周期(サンプリング周期)ΔTでサンプリングする。ここでサンプリング周期ΔTは次式(1)となる。
ΔT=Tp(n)−Tp(n−1) …(1)
【0060】
次に、モータ回転数演算部112は、そのサンプリング周期ΔTでサンプリングしたパルス波形信号PSbの1パルス当りの時間間隔Δtを求める。このΔtは次式(2)となる。
Δt=ΔT/Np(n) …(2)
【0061】
但し、Np(n)は1サンプリング周期ΔTでの立ち上がりエッジのサンプリング数であり、この例ではNp(n)=2となる。
【0062】
ここで、1パルス当りの時間間隔Δtの逆数、即ち1/Δtを電気モータMのスロット数で割る{(1/Δt)÷スロット数}と、1秒[s]当りのモータ回転数が求まる。従って、1分間当りのモータ回転数FBm[rpm]は、次式(3)で求められる。
FBm[rpm]=(1/Δt)÷スロット数×60[s] …(3)
【0063】
FB制御部102では、そのように演算されるモータ回転数FBmと、FB制御目標回転数との差分が取られ、この差分に応じた補正量をモータ回転数に応じた基礎電圧に加算した駆動電圧が、電気モータMの駆動回路であるFET107のゲートへ供給されてフィードバック制御が行われる。
【0064】
一方、FF制御目標回転数演算部103では、FB制御目標回転数より所定の余裕回転数だけ高いFF制御目標回転数としてモータ回転数FFmが演算され、電気モータMがそのモータ回転数FFmとなるように、FF制御部104からの電圧が、FET107のゲートへ供給されてフィードフォワード制御が行われる。
【0065】
モータ異常判定部105は、パルス波形信号PSからモータ回転数の検出状態が正常か異常かを判定する。この判定は、パルス波形信号PSの時間幅(周期)が予め定められた正常範囲内であれば検出したモータ回転数FBmが正常であり、正常範囲外(パルス波形が出ない場合も含む)であれば異常と判定する。正常と判定した際に「L」レベルの検出信号Ds、異常と判定した際に「H」レベルの検出信号Dsを選択部106へ出力する。
【0066】
選択部106は、モータ異常判定部105から「L」レベルの検出信号Dsが供給されている場合は、FB制御部102からの信号を選択し、「H」レベルの検出信号Dsが供給された際にFF制御部104からの信号を選択する。
【0067】
即ち、モータ異常判定部105で正常と判定されている場合は、選択部106に「L」レベルの検出信号Dsが供給される。この選択部106ではFB制御部102からの上記駆動電圧が選択され、この駆動電圧が選択部106を介してFET107のゲート端へ印加されることにより、バッテリ17からの電力が電気モータMへ供給され、電気モータMがFB制御目標回転数となるようにフィードバック制御される。
【0068】
一方、モータ異常判定部105で異常と判定された場合は、選択部106に「H」レベルの検出信号Dsが供給されるので、選択部106ではFF制御部104でフィードフォワード制御用のモータ回転数に応じた基礎電圧による駆動電圧が選択され、この駆動電圧が選択部106を介してFET107のゲート端へ印加されることにより、バッテリ17からの電力が電気モータMへ供給され、電気モータMがFF制御目標回転数となるようにフィードフォワード制御される。
【0069】
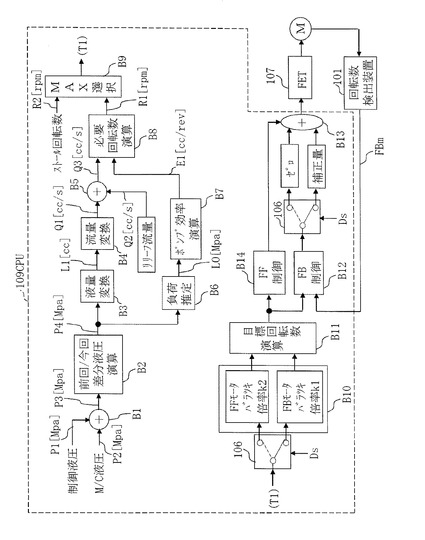
次に、このようなフィードバック制御又はフィードフォワード制御により回転する電気モータMで液圧ポンプ37,47が駆動され、この駆動と液圧制御弁31,41の制御とによって形成される制御液圧による制動力発生時の動作を、図15を参照して説明する。但し、図15は図13に示したCPU109がフィードバック制御及びフィードフォワード制御を行う際のロジックブロック図である。
【0070】
まず、フィードバック制御時の制御液圧制動力発生時の動作を説明する。ブレーキ操作状態に対応した基礎液圧がマスタシリンダ23にて発生すると、この基礎液圧とは独立して液圧ポンプ37,47の駆動と液圧制御弁31,41の制御によって形成される制御液圧が、各ホイールシリンダWC1〜WC4に付与されて各車輪FL〜RRに制御液圧制動力が発生する(上記図4のS101〜S105に対応)。この際、図15のCPU109においては、その制御液圧P1[Mpa]とマスタシリンダ液圧(M/C液圧)P2[Mpa]とが制御ステップB1で加算され、制御ステップB2において、その加算液圧P3[Mpa]の一定時間間隔における前回と今回の加算液圧の差が求められ、この差分液圧が制御液圧制動力に必要な要求液圧P4[Mpa](S106に対応)となる。
【0071】
次に、制御ステップB3で要求液圧P4[Mpa]が要求液量L1[cc]に変換される(S107に対応)。この変換で得られた要求液量L1[cc]が、更に制御ステップB4で1秒間の流量である要求流量Q1[cc/s]に変換される(S108に対応)。この要求流量Q1[cc/s]は、ホイールシリンダWC1〜WC4への必要流量であるが、これは一方で液圧制御弁31,41を通してリリーフしながら調圧しているので、常に一定に液圧制御弁31,41から制御液圧をリリーフする必要がある。そこで、制御ステップB5において、上記制御ステップB4で得られた要求流量Q1[cc/s]に、液圧制御弁31,41の作動に必要なリリーフ流量Q2[cc/s]が加算されて、液圧ポンプ37,47の必要な汲み上げ流量Q3[cc/s]が得られる(S109に対応)。
【0072】
一方、制御ステップB6において、上記制御ステップB2で得られた要求液圧P4[Mpa]から液圧ポンプ37,47の圧力の負荷LO(=P4[Mpa])が推定される。一方、制御ステップB7では、液圧ポンプ負荷LOとポンプ効率E1〔cc/rev〕との間に予め定められている関係と、推定した負荷LO=P4とから現時点のポンプ負荷に対応したポンプ効率E1〔cc/rev〕が流量と回転数とを変換するための係数として求められる。制御ステップB8において、汲み上げ流量Q3[cc/s]をポンプ効率E1[cc/rev]で割ることで、必要な電気モータMの必要回転数R1[rpm]が得られる(S110に対応)。
【0073】
次に、制御ステップB9において、そのモータ必要回転数R1[rpm]と、電気モータMがストールしない最低回転数であるストール回転数R2[rpm](S111に対応)とが比較され、回転数が大きい方が目標回転数として選択される。
【0074】
ここで、図15に示す選択部106には、モータ異常判定部105でモータ回転数の検出状態が正常であれば検出信号Dsの「L」レベルが供給されているので、選択部106は実線側のフィードバック制御側を選択している。この場合、制御ステップB10において、制御ステップB9で選択された例えばモータ必要回転数R1[rpm]に、FBモータバラツキ倍率k1(例えば1.1倍)が乗算され、この乗算結果が、制御ステップB11でFB制御目標回転数とされる(S112に対応)。
【0075】
制御ステップB14において、電気モータMがそのFB制御目標回転数に応じた基礎電圧が制御ステップB13に供給される。
【0076】
このFB制御目標回転数は、制御ステップB12において、回転数検出装置101で検出された実際のモータ回転数FBmとの差分が演算される。この差分に応じた電圧による補正量が、制御ステップB13で先の基礎電圧と加算されて駆動電圧とされ、この駆動電圧がモータ駆動回路としてのFET107のゲートへ供給され、これによって電気モータMがフィードバック制御され、FB制御目標回転数で駆動する(S113に対応)。
【0077】
次に、モータ異常判定部105で、モータ回転数の検出状態が異常と判定された際に、フィードバック制御からフィードフォワード制御に切替えられた際の動作を、図15及び図16を参照して説明する。
【0078】
モータ異常判定部105でモータ回転数の検出状態が異常と判定されると、図15に示す選択部106には「H」レベルの検出信号Dsが供給されるので、選択部106は、破線側のフィードフォワード制御側に切り替わる。これによって、制御ステップB10では、制御ステップB9で選択されたモータ必要回転数R1[rpm]に、FBモータバラツキ倍率k1よりも所定値高いFFモータバラツキ倍率k2(例えば1.5倍)が乗算され、この乗算結果が、制御ステップB11でFF制御目標回転数とされる(S112に対応)。
【0079】
但し、FFモータバラツキ倍率k2は、少なくともモータ初期条件、モータ耐久劣化、汲み上げ流量であるモータ吐出圧、モータ温度を考慮して得られる。そして、FF制御目標回転数は、必要最低限のリリーフ流量Q2[cc/s]を流すために、そのFFモータバラツキ倍率k2を考慮した回転数となっている。
【0080】
つまり、FB制御目標回転数より所定の余裕回転数だけ高いFF制御目標回転数が演算され、制御ステップB14において、電気モータMがそのFF制御目標回転数に応じたモータ回転数FFmとなるように、FF制御部104からの基礎電圧が駆動電圧として、FET107のゲートへ供給されるフィードフォワード制御が行われる(S113に対応)。この場合、制御ステップB12のFB制御部102からの補正量はゼロである。従って、制御ステップB13では、制御ステップB14によるFF制御目標回転数に応じた電圧のみが選択される。
【0081】
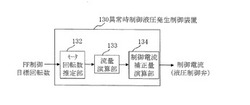
これと同時にフィードフォワード制御への切替え時には、ブレーキECU60に設けられた図16に示す異常時制御液圧発生制御装置130によって液圧制御弁31,41への制御電流を次のように供給する制御を行う。
【0082】
即ち、異常時制御液圧発生制御装置130は、モータ回転数推定部132と、流量演算部133と、制御電流補正演算部134とを備えて構成されている。モータ回転数推定部132は、上記フィードフォワード制御への切替え時に、制御ステップB11で得られたFF制御目標回転数に応じて徐々に上がるモータ回転数を推定する。流量演算部133は、その推定モータ回転数に応じた液圧ポンプ37,47での汲み上げ流量に応じて徐々に増加する液圧制御弁31,41の通過流量を推定する。
【0083】
制御電流補正演算部134は、その推定通過流量に応じて液圧制御弁31,41の絞りを開閉制御する制御電流を演算する。即ち、電気モータMの応答と、液圧制御弁31,41の通過流量の応答とを考慮して液圧制御弁31,41の制御電流を次のように制御する。これは、電気モータMがFB制御目標回転数よりも余裕回転数だけ高いFF制御目標回転数で回転されることにより液圧制御弁31,41を通過するブレーキ液が漸増しても、ホイールシリンダ液圧が変化しないように、液圧制御弁31,41に印加する制御電流を漸次変化させるように制御する。
【0084】
但し、電気モータMの応答は、一般的に知られている機械的時定数から求める。機械的時定数は、液圧ポンプ37,47のポンプ負荷、フルード粘性、電気モータMの負荷に応じて変化するモータ温度に応じて求める。それらポンプ負荷は圧力センサPによりポンプ圧力を検出して求め、フルード粘性、モータ温度は、モニタ又は推定により求める。
【0085】
また、液圧制御弁31,41の通過流量の応答は、液圧ポンプ37,47から液圧制御弁31,41までの間の配管径、配管長、フルード粘性、フルード密度、オリフィス径などによる油圧回路から、その流量の遅れを算出する。
【0086】
このような異常時制御液圧発生制御装置130の動作を説明する。まず、図17(a)に時刻t1で示すフィードバック制御からフィードフォワード制御への切替え時に、モータ回転数推定部132により、制御ステップB11で得られたFF制御目標回転数に応じて、図17(b)に曲線r2で示す徐々に上がるモータ回転数が推定される。
【0087】
次に、流量演算部133により、その推定モータ回転数r2に応じた液圧ポンプ37,47での汲み上げ流量に応じて、(b)に曲線q2で示す徐々に増加する液圧制御弁31,41の通過流量が推定される。そして、制御電流補正演算部134により、その推定通過流量q2に応じて液圧制御弁31,41の絞りを開閉制御する制御電流が、図17(c)に徐々に下がる曲線i2で示すように演算される。即ち、電気モータMがFF制御目標回転数で回転されることにより液圧制御弁31,41を通過するブレーキ液が曲線q2のように漸増しても、図17(d)に線wc2で示すようにホイールシリンダ液圧が変化しない、言い換えればホイールシリンダ液圧wc2が一定となるように、制御電流i2が漸次変化される。
【0088】
このように本実施形態の車両用ブレーキ装置によれば、フィードバック制御からフィードフォワード制御への切替え時に、ホイールシリンダ液圧wc2が変化しないように、液圧制御弁31,41への制御電流i2を制御することができる。従って、液圧ポンプ37,47の汲み上げ流量と液圧制御弁31,41の開口度合に従来のようにずれが生じることがなくなるので、運転者がブレーキ操作時にホイールシリンダ液圧がスムーズに変化して、運転者がブレーキ操作時に違和感を感じるということが無くなる。
【0089】
また、少なくとも液圧ポンプ37,47のポンプ負荷に応じて機械的時定数を切り替え、この機械的時定数を用いて電気モータMの応答を求め、また、少なくとも液圧ポンプ37,47から液圧制御弁31,41までの間の流路抵抗及びブレーキ液の粘性に応じて液圧制御弁31,41の通過流量の応答を求め、これら応答をモータ回転数の推定並びに液圧制御弁31,41の通過流量の推定に反映させるようにした。従って、モータ回転数の推定精度がより高くなって、液圧制御弁31,41の通過流量をより高精度に推定できるので、液圧制御弁31,41への制御電流をより適正に可変制御してホイールシリンダ液圧を一定に制御することができる。
【0090】
上記実施形態に係る車両用ブレーキ装置では、液圧ブレーキ装置Bと回生ブレーキ装置Aとを協調制御しているが、本発明に係る車両用ブレーキ装置は、下記のようなトラクションコントロール装置、ブレーキアシスト制御装置、坂道発進制御装置、アクティブクルーズコントロール装置などを備えた車両用ブレーキ装置としても使用することができる。即ち、車両の走行状態に応じて要求される制動力を車輪に付与するために、電気モータを目標回転数で回転させて液圧ポンプから液圧制御弁の作動に必要なリリーフ流量のブレーキ液を液圧制御弁に循環させるとともに、液圧制御弁に制御電流を印加することによって、液圧制御弁に要求性動力に応じて設定された制御液圧を発生させる上記の制御液圧発生装置を備えた車両用ブレーキ装置として用いることができる。
【0091】
トラクションコントロールは、駆動輪FL,FRのスリップ量が所定値を超え且つ増加するときは、制御液圧発生装置から駆動輪FL,FRのホイールシリンダWC1,WC2に液圧を供給し、この液圧をスリップ量に応じて液圧制御弁31,41により制御し、スリップ量が所定値を超え且つ増加しないときは、圧力発生装置を停止し、駆動輪FL,FRのホイールシリンダWC1,WC2にスリップ量に応じて液圧制御弁31,41により制御される液圧を封止し、スリップ量が所定値以下のときは駆動輪FL,FRのホイールシリンダWC1,WC2を調圧リザーバ34,44に接続し、これによりブレーキ手段にスリップ量に応じた液圧制動力を車輪に付与させる制御である。
【0092】
ブレーキアシスト制御は、緊急にブレーキを掛けた場合や、強い制動力を発生させる場合などに、圧力発生装置から駆動輪FL,FRのホイールシリンダWC1,WC2に液圧を供給し、この液圧をマスタシリンダ23から供給される液圧より大きい液圧に液圧制御弁31,41によって制御し、これによりブレーキ手段に大きい液圧制動力を車輪に付与させる制御である。
【0093】
坂道発進制御は、坂道での発進時に、圧力発生装置から駆動輪FL,FRのホイールシリンダWC1,WC2に液圧を供給し、この液圧を液圧制御弁31,41により停止保持液圧に制御し、これによりブレーキ手段に車両を坂道に停止保持する液圧制動力を車輪に付与させる制御である。
【0094】
アクティブクルーズコントロールは、車間距離を所定値以上に保つために、圧力発生装置から駆動輪FL,FRのホイールシリンダWC1,WC2に液圧を供給し、この液圧を液圧制御弁31,41により制御し、車間距離が所定値以下になるとブレーキ手段に自動的に液圧制動力を車輪に付与させる制御である。
【0095】
上記実施形態では、液圧ブレーキ装置Bのブレーキ配管系は、FF車に前後配管しているが、FR車に前後配管してもよい。また、倍力装置として負圧式ブースタ22を用いているが、ポンプにより発生した液圧をアキュムレータに蓄圧し、この液圧を利用して倍力する倍力装置を用いてもよい。
【符号の説明】
【0096】
11…エンジン、12…モータ、13…動力分割機構、14…動力伝達機構、15…発電機、16…インバータ、17…バッテリ、18…エンジンECU、19…ハイブリッドECU、21…ブレーキペダル、21a…ペダルストロークセンサ、22…負圧式ブースタ、23…マスタシリンダ、23d…第1液圧室、23f…第2液圧室、24…リザーバタンク、25…ブレーキアクチュエータ、31,41…液圧制御弁、32,33,42,43…増圧制御弁、35,36,45,46…減圧制御弁、34,44…調圧リザーバ、37,47…ポンプ、60…ブレーキECU、61…記憶装置、100…制御液圧発生制御装置、101…回転数検出装置、102…FB制御部、103…FF制御目標回転数演算部、104…FF制御部、105…モータ異常判定部、106…選択部、107…FET、108…ダイオード、110…シャント抵抗器、111…電流検出回路、112…モータ回転数演算部、130…異常時制御液圧発生制御装置、132…モータ回転数推定部、133…流量演算部、134…制御電流補正演算部、A…回生ブレーキ装置、B…液圧ブレーキ装置、BK1,BK2,BK3,BK4…ブレーキ手段、FR,FL,RR,RL…車輪、Lf,Lr…油経路、M…電気モータ、P…圧力センサ、Sfl,Sfr,Srl,Srr…車輪速センサ、WC1,WC2,WC3,WC4…ホイールシリンダ。
【技術分野】
【0001】
本発明は、モータ回転数のフィードバック制御中に何らかの原因でモータ回転数が検出できずフィードバック制御が行えなくなった際に、フィードフォワード制御に切替えて回転制御を継続する車両用ブレーキ装置に関する。
【背景技術】
【0002】
従来から、例えば、特許文献1に記載の液圧ブレーキ装置および回生ブレーキ装置を備えた車両用ブレーキ装置が知られている。液圧ブレーキ装置は、マスタシリンダにてブレーキ操作に応じた基礎液圧を発生し、発生した基礎液圧をマスタシリンダと液圧制御弁とを介在した油経路によって連結された各車輪のホイールシリンダに付与し、各車輪に基礎液圧制動力を発生させる。また、制御液圧指令値に応じて電気モータを駆動して液圧制御弁に並設された液圧ポンプを駆動させることにより制御液圧を発生し、発生した制御液圧をホイールシリンダに付与して各車輪に制御液圧制動力を発生させる。回生ブレーキ装置は、ブレーキ操作の状態に対応した回生制動力を車輪の何れかに発生させる。
【0003】
この車両用ブレーキ装置においては、運転者の要求制動力に対して回生制動力が変動して不足した場合、制御液圧制動力により回生制動力の不足を補償するようになっている。すなわち、電気モータを高回転で駆動して液圧ポンプの吐出流量を高めておき、必要な流量分に対して不要な流量分のブレーキ液を液圧制御弁からマスタシリンダ側に逃がすことにより制御液圧を調整している。この車両用ブレーキ装置によれば、要求制動力に対して回生制動力が不足する事態に対し、必要に応じて応答性よく対応することができる。
【0004】
また、特許文献2には、モータ回転数を制御してポンプ吐出流量を変化させることにより、制御液圧を制御する装置を備えた車両用ブレーキ装置が開示されている。この車両用ブレーキ装置によれば、ブレーキの速い踏み込み時等でブレーキ液圧の消費油量が多く必要な場合には、モータ回転数を高めてポンプ吐出流量を多くして応答性を高くすることができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−21745号公報
【特許文献2】特開平10−119748号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
液圧ブレーキ装置および回生ブレーキ装置を備えた車両用ブレーキ装置では、通常ブレーキ領域で頻繁に作動する制御液圧を発生する液圧ポンプを駆動する電気モータの耐久性が重要である。特許文献1に記載の車両用ブレーキ装置においては、電気モータを高回転で駆動しなければならず、電気モータが早期に寿命に達するおそれがある。一方、特許文献2に記載の車両用ブレーキ装置においては、ポンプ吐出流量を変化させるためにモータ回転数を制御するので、電気モータの耐久性を向上させることは可能である。しかし、ブレーキペダルの踏み込み程度が刻々変わることで液圧ポンプに掛かる負荷が変動する状況で、モータ回転数をどのように制御すべきかについては提案されていない。
【0007】
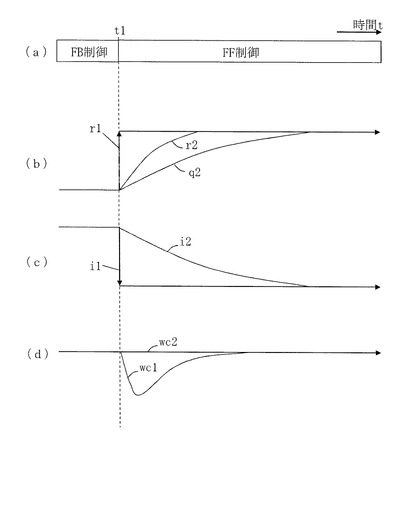
モータは高寿命化を図るため回転数を低下させることが有効であり、このため特許文献2では、モータ回転数を検出してモータへの印加電圧を適正に補正するフィードバック(FB)制御が行われている可能性がある。このフィードバック制御は、検出されたモータの回転数が、FB制御目標回転数に一致するように行われる。また、特許文献2には記載されていないが、何らかの原因でモータ回転数が検出できずフィードバック制御が行えなくなった際に、フィードフォワード(FF)制御に切替えて回転制御を継続することが考えられている。このときのFF制御目標回転数は、推定回転数に推定誤差があっても回転数不足により車輪の制動力に不足が生じないように、FB制御目標回転数よりも高く設定される。このため、フィードバック制御からフィードフォワード制御に切替えられた際に、モータ回転数の指令値が図17(b)に矢印r1で示すようにFF制御目標回転数に急に高くなる。この高くなるモータ回転数に追従させるために、マスタシリンダとホイールシリンダとの間に接続された液圧制御弁の制御電流{図17(c)に矢印i1で示す}を急に下げて対応すると、液圧制御弁が急に開口する。しかし、モータはその時定数に従ってFF制御目標回転数となり、ポンプは、モータがFF制御目標回転数になっても、その汲み上げ流量は急には追従しない。このため、急に開口した液圧制御弁から今まで以上の流量のブレーキ液がリリーフされるので、図17(d)に曲線wc1で示すようにホイールシリンダ液圧が急に下がってしまう。
【0008】
このようにフィードバック制御からフィードフォワード制御に切替えた場合、ポンプの汲み上げ流量と液圧制御弁の開口度合にずれが生じるため、ホイールシリンダのブレーキ液圧がスムーズに変化せず、運転者がブレーキ操作時に違和感を感じるという問題がある。
【0009】
本発明は、このような事情に鑑みてなされたものであり、フィードバック制御からフィードフォワード制御への切替え時に、ホイールシリンダ液圧が急に下がらないように制御して運転者がブレーキ操作時に違和感を感じないようにすることができる車両用ブレーキ装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記目的を達成するためになされた請求項1に係る発明の構成上の特徴は、ブレーキ操作に応じたマスタシリンダ液圧を発生するマスタシリンダと、各車輪に設けられ、ホイールシリンダに前記マスタシリンダからブレーキ液が供給されることによって前記車輪に制動力を付与する車輪ブレーキ装置と、前記マスタシリンダと前記ホイールシリンダとの間に接続された液圧制御弁と、前記液圧制御弁と前記ホイールシリンダとの間に吐出ポートが連通され、前記マスタシリンダと前記液圧制御弁との間に吸入ポートが連通された液圧ポンプと、前記液圧ポンプを駆動する電気モータと、前記電気モータのモータ回転数を検出する回転数検出装置と、前記電気モータのFB制御目標回転数に応じた制御電力を、前記回転数検出装置で検出された前記モータ回転数と前記電気モータのFB制御目標回転数との差に応じて補正して前記電気モータの駆動回路に供給するフィードバック制御回路と、前記電気モータのFF制御目標回転数に応じた制御電力を前記駆動回路に供給するフィードフォワード制御回路と、前記電気モータを前記フィードバック制御回路によってFB制御目標回転数で回転させて前記液圧ポンプから目標流量のブレーキ液を前記液圧制御弁に循環させるとともに、前記液圧制御弁に制御電流を供給することによって、前記ホイールシリンダに生じるホイールシリンダ液圧が前記マスタシリンダ液圧より制御液圧だけ高くなるように制御する制御液圧発生制御装置と、前記回転数検出装置の異常が異常検出装置によって検出されると、前記電気モータを前記フィードフォワード制御回路によって前記FB制御目標回転数より余裕回転数だけ高いFF制御目標回転数で回転させるとともに、前記電気モータが前記余裕回転数だけ高いFF制御目標回転数で回転されることにより前記液圧制御弁を通過する前記ブレーキ液が漸増させ、前記ホイールシリンダ液圧が変化しないように、前記液圧制御弁に供給する前記制御電流を漸次変化させる異常時制御液圧発生制御装置と、を備えることにある。
【0011】
請求項2に係る発明の構成上の特徴は、請求項1において、回生制動力を前記車輪に発生させる回生ブレーキ装置と、前記ブレーキ操作量に応じた要求制動力を演算する要求制動力演算手段と、前記マスタシリンダ液圧によって発生する基礎液圧制動力を演算する基礎液圧制動力演算手段と、前記要求制動力から前記基礎液圧制動力を減算して要求回生制動力を演算する要求回生制動力演算手段と、前記要求回生制動力と前記回生ブレーキ装置が現在発生可能な現回生制動力との差に基づいて前記制御液圧を設定する制御液圧設定手段と、前記制御液圧の変化に基づいて前記ホイールシリンダに供給されるブレーキ液量及び前記液圧制御弁の作動に必要なリリーフ流量に基づいて前記電気モータのFB制御目標回転数を設定するFB制御目標回転数設定手段と、を備えることにある。
【0012】
請求項3に係る発明の構成上の特徴は、請求項1又は2において、前記電気モータは、ブラシ及びコミュテータを介して直流電流を供給されることにより回転するブラシ付き直流電気モータであり、前記回転数検出装置は、前記ブラシと前記コミュテータとの間の断続によって前記電気モータへの供給電流に単位時間に発生するリップル成分を計数することにより前記電気モータのモータ回転数を検出することにある。
【0013】
請求項4に係る発明の構成上の特徴は、請求項1乃至3のいずれか一項において、前記電気モータが前記余裕回転数だけ高いFF制御目標回転数で回転されることにより前記液圧制御弁を通過する前記ブレーキ液が漸増する時定数を、少なくとも前記液圧ポンプの負荷を考慮して演算したモータ応答の時定数と、少なくとも前記液圧ポンプから前記ブレーキ液を前記液圧制御弁に循環させる配管回路の流路抵抗及び前記ブレーキ液の粘性を考慮して演算した流量応答の時定数に基づいて演算することにある。
【発明の効果】
【0014】
請求項1に係る発明によれば、回転数検出装置の異常時にフィードバック制御からフィードフォワード制御へ切替えた場合、電気モータが余裕回転数だけ高いFF制御目標回転数で回転されることにより液圧制御弁を通過するブレーキ液を漸増させ、それでも、ホイールシリンダ液圧が変化しないように、液圧制御弁に供給する制御電流を漸次変化させるようにしたので、ブレーキ操作時にホイールシリンダ液圧が低下することを防止でき、運転者がブレーキ操作時に違和感を感じるということを防ぐことが出来る。
【0015】
請求項2に係る発明によれば、要求回生制動力と現回生制動力との差に基づいて制御液圧を設定し、この制御液圧の変化に応じたホイールシリンダへのブレーキ液量及び液圧制御弁の作動に必要なリリーフ流量に基づいて電気モータのFB制御目標回転数を設定する場合でも、上記同様に、運転者がブレーキ操作時に違和感を感じるということを無くすことが出来る。
【0016】
請求項3に係る発明によれば、電気モータをブラシ付き直流電気モータとし、供給電流のリップルを計数してモータ回転数を検出する回転数検出装置を用いることによりコスト低減を図った場合でも、回転数検出装置の異常時にフィードバック制御からフィードフォワード制御へ切替えたときに、液圧制御弁への制御電流を漸次変化させてホイールシリンダ液圧が低下しないようにすることが出来る。
【0017】
請求項4に係る発明によれば、電気モータがFB制御目標回転数よりも余裕回転数だけ高いFF制御目標回転数で回転されることにより液圧制御弁を通過するブレーキ液が漸増する時定数を適正に演算することが出来る。何故ならば、少なくとも液圧ポンプの負荷を考慮して演算したモータ応答の時定数と、少なくとも液圧ポンプからブレーキ液を液圧制御弁に循環させる配管回路の流路抵抗及びブレーキ液の粘性を考慮して演算した流量応答の時定数に基づいて演算するからである。このように液圧制御弁の通過ブレーキ液の漸増時の時定数を適正に演算することができるので、その通過ブレーキ液漸増に応じた液圧制御弁への制御電流を適正に制御して、フィードバック制御からフィードフォワード制御へ切替えたときに、ホイールシリンダ液圧が低下しないようにすることが出来る。
【図面の簡単な説明】
【0018】
【図1】本発明による車両用ブレーキ装置を適用した車両の一実施形態を示す概要図である。
【図2】図1に示す車両用ブレーキ装置の液圧ブレーキ装置を示す図である。
【図3】回生制動力と液圧制動力とのすり替え時の関係図である。
【図4】本実施形態の車両用ブレーキ装置の作動を示すフローチャートである。
【図5】図4に示す必要制御液圧演算サブルーチンを説明するためのフローチャートである。
【図6】図4に示す必要液量変換サブルーチンを説明するためのフローチャートである。
【図7】図4に示す必要流量演算サブルーチンを説明するためのフローチャートである。
【図8】図4に示す必要モータ回転数演算サブルーチンを説明するためのフローチャートである。
【図9】ブレーキ操作に応じて発生するマスタシリンダ圧と、そのブレーキ操作量に応じた全制動力(基礎液圧制動力と回生制動力と必要な場合には制御液圧制動力との和で表される制動力)との関係を示す図である。
【図10】ブレーキ操作量に応じた回生制動力と回生ブレーキ装置が発生可能な回生制動力との差と、電気モータの駆動により液圧ポンプから吐出されるブレーキ液による液圧制御弁の制御液圧との関係を示す図である。
【図11】電気モータの駆動により液圧ポンプから吐出されるブレーキ液による液圧制御弁の制御液圧と、そのブレーキ液が供給されるホイールシリンダにおける累積の液量との関係を示す図である。
【図12】図11の累積の液量の変動を示す図である。
【図13】本実施形態の車両用ブレーキ装置における制御液圧発生制御装置の構成を示すブロック図である。
【図14】本実施形態の車両用ブレーキ装置の電気モータの回転数検出時の動作を説明するためのタイミングチャートである。
【図15】上記制御液圧発生制御装置を有するブレーキECUのCPUがフィードバック制御及びフィードフォワード制御を行う際のロジックブロック図である。
【図16】本実施形態の車両用ブレーキ装置における異常時制御液圧発生制御装置の構成を示すブロック図である。
【図17】フィードバック制御からフィードフォワード制御への切替え後のモータ回転数、液圧制御弁通過流量、液圧制御弁への制御電流、ホイールシリンダ液圧の時間的な変化を示す図である。
【発明を実施するための形態】
【0019】
以下、本発明に係る車両用ブレーキ装置の一実施の形態をハイブリッド車に適用した場合について図面を参照して説明する。図1に示すように、車両用ブレーキ装置は、ハイブリッド車に適用されるように構成されたものであり、液圧ブレーキ装置Bと、回生ブレーキ装置Aと、液圧ブレーキ装置Bおよび回生ブレーキ装置Aを協調制御するブレーキECU(電子制御ユニット)60と、ブレーキECU60からの要求値に応じてインバータ16を介してハイブリッド車の駆動源であるモータ12を制御するハイブリッドECU(電子制御ユニット)19等とを備えている。
【0020】
ハイブリッド車は、ハイブリッドシステムによって駆動輪、例えば左右前輪FL,FRを駆動させる車両である。ハイブリッドシステムは、エンジン11およびモータ12の2種類の動力源を組み合わせて使用するパワートレーンである。ハイブリッドシステムには、エンジン11およびモータ12の双方で車輪を直接駆動する方式であるパラレルハイブリッドシステム、およびモータ12によって車輪が駆動され、エンジン11はモータ12への電力供給源として作用するシリアルハイブリッドシステムがあるが、本実施形態のハイブリッド車には、パラレルハイブリッドシステムが装備されている。
【0021】
このパラレルハイブリッドシステムを搭載したハイブリッド車において、エンジン11の駆動力は、動力分割機構13および動力伝達機構14を介して駆動輪(本実施形態では左右前輪FL,FR)に伝達されるようになっており、モータ12の駆動力は、動力伝達機構14を介して駆動輪に伝達されるようになっている。動力分割機構13は、エンジン11の駆動力を車両駆動力と発電機駆動力に適切に分割するものである。動力伝達機構14は、走行条件に応じてエンジン11およびモータ12の駆動力を適切に統合して駆動輪に伝達するものである。動力伝達機構14はエンジン11とモータ12の伝達される駆動力比を0:100〜100:0の間で調整している。この動力伝達機構14は変速機能を有している。
【0022】
エンジン11はエンジンECU(電子制御ユニット)18によって制御されており、エンジンECU18は後述するハイブリッドECU19からのエンジン出力要求値に従って電子制御スロットル(図示省略)に開度指令を出力し、エンジン11の回転数を調整する。モータ12は、エンジン11の出力を補助し駆動力を高めるものであり、一方車両の制動時には発電を行いバッテリ17を充電するものである。発電機15は、エンジン11の出力により発電を行うものであり、エンジン始動時のスタータの機能を有する。これらモータ12および発電機15は、インバータ16にそれぞれ電気的に接続されている。インバータ16は、直流電源としてのバッテリ17に電気的に接続されており、モータ12および発電機15から入力した交流電圧を直流電圧に変換してバッテリ17に供給したり、逆にバッテリ17からの直流電圧を交流電圧に変換してモータ12および発電機15へ出力したりするものである。
【0023】
回生ブレーキ装置Aは、モータ12、インバータ16およびバッテリ17等から構成されている。この回生ブレーキ装置Aは、ブレーキ操作状態に基づいた回生制動力を各車輪FL,FR,RL,RRの何れか(本実施形態では駆動源であるモータ12によって駆動される左右前輪FL,FR)に発生させるものである。ブレーキ操作状態は、ブレーキペダル21の操作状態であり、例えばブレーキペダル21への踏力に相関するマスタシリンダ圧、ブレーキペダル21のストローク量、ブレーキペダル21への踏力などである。ブレーキ操作状態検出手段は、このブレーキ操作状態を検出するものであり、マスタシリンダ圧を検出する圧力センサP、ブレーキペダル21のストローク量を検出するペダルストロークセンサ21aなどである。
【0024】
ハイブリッドECU19には、インバータ16が互いに通信可能に接続されている。ハイブリッドECU19は、アクセル開度およびシフトポジション(図示しないシフトポジションセンサから入力したシフト位置信号から算出する)から必要なエンジン出力、電気モータトルクおよび発電機トルクを導出し、その導出したエンジン出力要求値をエンジンECU18に送信してエンジン11の駆動力を制御する。ハイブリッドECU19は、導出した電気モータトルク要求値および発電機トルク要求値に従って、インバータ16を通してモータ12および発電機15を制御する。また、ハイブリッドECU19はバッテリ17が接続されており、バッテリ17の充電状態、充電電流などを監視している。さらに、ハイブリッドECU19は、アクセルペダル(図示省略)に組み付けられて車両のアクセル開度を検出するアクセル開度センサ(図示省略)も接続されており、アクセル開度センサからアクセル開度信号を入力している。
【0025】
液圧ブレーキ装置Bは、車輪ブレーキ装置(基礎液圧制動力発生装置)と、ブレーキアクチュエータ(制御液圧制動力発生装置)25等とから構成されている。液圧ブレーキ装置Bは、直接各車輪FL,FR,RL,RRに液圧制動力を付与して車両を制動させる。車輪ブレーキ装置は、エンジン11の吸気負圧をダイヤフラムに作用させてブレーキペダル21の踏み込み操作により生じるブレーキ操作力を助勢して倍力(増大)する倍力装置である負圧式ブースタ22と、負圧式ブースタ22により倍力されたブレーキ操作力(すなわちブレーキペダル21の操作状態)に応じた基礎液圧である液圧(油圧)のブレーキ液(油)を生成してホイールシリンダWC1〜WC4に供給するマスタシリンダ23と、ブレーキ液を貯蔵してマスタシリンダ23にそのブレーキ液を補給するリザーバタンク24とから構成されている。ブレーキアクチュエータ25は、マスタシリンダ23とホイールシリンダWC1〜WC4との間に設けられている。
【0026】
図2に示すように、車輪ブレーキ装置は、ブレーキペダル21の踏み込みによるブレーキ操作状態に対応した基礎液圧をマスタシリンダ23にて発生し、発生した基礎液圧を当該マスタシリンダ23と液圧制御弁31,41をそれぞれ介在した油経路Lf,Lrによって連結された各車輪FL,FR,RL,RRのホイールシリンダWC1,WC2,WC3,WC4に直接付与することにより、各車輪FL,FR,RL,RRに基礎液圧に対応した基礎液圧制動力を発生させる。ブレーキアクチュエータ25は、ブレーキ操作状態に対応して発生される基礎液圧とは独立して液圧ポンプ37,47の駆動と液圧制御弁31,41の制御によって形成される制御液圧を各車輪FL,FR,RL,RRのホイールシリンダWC1,WC2,WC3,WC4に付与することにより各車輪FL,FR,RL,RRに制御液圧制動力を発生させる。
【0027】
液圧ブレーキ装置Bのブレーキ配管系は前後配管方式にて構成されており、マスタシリンダ23の第1および第2液圧室23d、23fは、油経路LrおよびLfにそれぞれ接続されている。油経路Lrは、第1液圧室23dと左右後輪RL,RRのホイールシリンダWC3,WC4とをそれぞれ連通するものであり、油経路Lfは、第2液圧室23fと左右前輪FL,FRのホイールシリンダWC1,WC2とをそれぞれ連通するものである。各ホイールシリンダWC1,WC2,WC3,WC4は、マスタシリンダ23から油経路Lf,Lrを介して液圧(基礎液圧、制御液圧)が供給されると、各ホイールシリンダWC1,WC2,WC3,WC4に対応してそれぞれ設けられた各ブレーキ手段BK1,BK2,BK3,BK4を作動させて各車輪FL,FR,RL,RRに液圧制動力(基礎液圧制動力、制御液圧制動力)を付与する。各ブレーキ手段BK1,BK2,BK3,BK4としては、ディスクブレーキ、ドラムブレーキ等があり、ブレーキパッド、ブレーキシュー等の摩擦部材が車輪に一体のディスクロータ、ブレーキドラム等の回転を規制するようになっている。
【0028】
ブレーキアクチュエータ25について図2を参照して詳述する。このブレーキアクチュエータ25は、一般的によく知られているものであり、液圧制御弁31,41、ABS制御弁を構成する増圧制御弁32,33,42,43および減圧制御弁35,36,45,46、調圧リザーバ34,44、液圧ポンプ37,47、電気モータMなどを一つのケースにパッケージすることにより構成されている。液圧制御弁31,41および液圧ポンプ37,47等により制御液圧発生装置を構成している。
【0029】
まず、ブレーキアクチュエータ25の前輪系統の構成について説明する。油経路Lfには、差圧制御弁から構成される液圧制御弁31が備えられている。この液圧制御弁31は、ブレーキECU60により連通状態と差圧状態を切り替え制御されるものである。液圧制御弁31は通常連通状態とされているが、差圧状態にすることによりホイールシリンダWC1,WC2側の油経路Lf2をマスタシリンダ23側の油経路Lf1よりも所定の制御差圧分高い圧力に保持することができる。この制御差圧はブレーキECU60により制御電流に応じて調圧されるようになっている。また、この液圧制御弁31は小径の弁孔を有しており、ホイールシリンダ側の圧力がマスタシリンダ側の圧力より所定圧以上高くなれば、液圧制御弁31の弁孔が絞り孔として作用し、液圧制御弁31のマスタシリンダ側とホイールシリンダ側との間に差圧(駆動差圧)が発生する。
【0030】
油経路Lf2は2つに分岐しており、一方にはABS制御の増圧モード時においてホイールシリンダWC1へのブレーキ液圧の増圧を制御する増圧制御弁32が備えられ、他方にはABS制御の増圧モード時においてホイールシリンダWC2へのブレーキ液圧の増圧を制御する増圧制御弁33が備えられている。これら増圧制御弁32,33は、ブレーキECU60により連通・遮断状態を制御できる2位置弁として構成されている。そして、これら増圧制御弁32,33が連通状態に制御されているときには、マスタシリンダ23の基礎液圧および液圧ポンプ37の駆動と液圧制御弁31の制御によって形成される制御液圧の少なくとも一方を各ホイールシリンダWC1,WC2に加えることができる。また、増圧制御弁32,33は減圧制御弁35,36および液圧ポンプ37とともにABS制御を実行することができる。
【0031】
なお、ABS制御が実行されていないノーマルブレーキの際には、これら増圧制御弁32,33は常時連通状態に制御されている。また、増圧制御弁32,33には、それぞれ安全弁32a,33aが並列に設けられており、ABS制御時においてブレーキペダル21を離したとき、それに伴ってホイールシリンダWC1,WC2側からのブレーキ液をリザーバタンク24に戻すようになっている。
【0032】
また、増圧制御弁32,33と各ホイールシリンダWC1,WC2との間における油経路Lf2は、油経路Lf3を介して調圧リザーバ34のリザーバ孔34aに連通されている。油経路Lf3には、ブレーキECU60により連通・遮断状態を制御できる減圧制御弁35,36がそれぞれ配設されている。これらの減圧制御弁35,36はノーマルブレーキ状態(ABS非作動時)では常時遮断状態とされ、また、適宜連通状態として油経路Lf3を通じて調圧リザーバ34へブレーキ液を逃がすことにより、ホイールシリンダWC1,WC2におけるブレーキ液圧を制御し、車輪がロック傾向にいたるのを防止できるように構成されている。
【0033】
さらに、液圧制御弁31と増圧制御弁32,33との間における油経路Lf2と調圧リザーバ34のリザーバ孔34aとを結ぶ油経路Lf4には液圧ポンプ37が安全弁37aと共に配設されている。そして、調圧リザーバ34のリザーバ孔34bを油経路Lf1を介してマスタシリンダ23と接続するように油経路Lf5が設けられている。液圧ポンプ37は、ブレーキECU60の指令により電気モータMによって駆動されるものである。液圧ポンプ37は、ABS制御の減圧モード時においては、ホイールシリンダWC1,WC2内のブレーキ液または調圧リザーバ34に貯められているブレーキ液を吸い込んで連通状態である液圧制御弁31を介してマスタシリンダ23に戻している。また、液圧ポンプ37は、ESC制御、トラクションコントロール、ブレーキアシストなどの車両の姿勢を安定に制御するための制御液圧を形成する際においては、差圧状態に切り替えられている液圧制御弁31に制御差圧を発生させるべく、マスタシリンダ23内のブレーキ液を油経路Lf1,Lf5および調圧リザーバ34を介して吸い込んで油経路Lf4,Lf2および連通状態である増圧制御弁32,33を介して各ホイールシリンダWC1,WC2に吐出して制御液圧を付与している。なお、液圧ポンプ37が吐出したブレーキ液の脈動を緩和するために、油経路Lf4の液圧ポンプ37の上流側にはダンパ38が配設されている。
【0034】
また、油経路Lf1には、マスタシリンダ23内のブレーキ液圧であるマスタシリンダ圧を検出する圧力センサPが設けられており、この検出信号はブレーキECU60に送信されるようになっている。なお、圧力センサPは油経路Lr1に設けるようにしてもよい。マスタシリンダ圧はブレーキ操作状態の一つである。他のブレーキ操作状態としては、ブレーキペダル21のペダルストロークがある。このペダルストロークはブレーキペダル21に付設されているペダルストロークセンサ21aによって検出される。その検出信号はブレーキECU60に送信されるようになっている。
【0035】
さらに、ブレーキアクチュエータ25の後輪系統も前述した前輪系統と同様な構成であり、後輪系統を構成する油経路Lrは油経路Lfと同様に油経路Lr1〜Lr5から構成されている。油経路Lrには液圧制御弁31と同様な液圧制御弁41、および調圧リザーバ34と同様な調圧リザーバ44が備えられている。ホイールシリンダWC3,WC4に連通する分岐した油経路Lr2,Lr2には増圧制御弁32,33と同様な増圧制御弁42,43が備えられ、油経路Lr3には減圧制御弁35,36と同様な減圧制御弁45,46が備えられている。油経路Lr4には、液圧ポンプ37、安全弁37aおよびダンパ38と同様な液圧ポンプ47、安全弁47aおよびダンパ48が備えられている。なお、増圧制御弁42,43には、それぞれ安全弁32a,33aと同様な安全弁42a,43aが並列に設けられている。以上のような構成のブレーキアクチュエータ25により、液圧ポンプ37,47の駆動と液圧制御弁31,41の制御によって形成された制御液圧を各車輪FL,FR,RL,RRのホイールシリンダWC1,WC2,WC3,WC4に付与することにより各車輪FL,FR,RL,RRに制御液圧制動力を発生させることができる。
【0036】
ブレーキECU60は、マイクロコンピュータ(図示省略)を有しており、マイクロコンピュータは、バスを介してそれぞれ接続された入出力インターフェース、CPU、RAMおよびROM(いずれも図示省略)を備えている。ブレーキECU60は、図1に示すように、車輪速度センサSfl,Sfr,Srl,Srr、圧力センサP、各制御弁31,32,33,35,36,41,42,43,45,46,電気モータMに接続されている。車輪速度センサSfl,Sfr,Srl,Srrは、各車輪FL,FR,RL,RRの付近にそれぞれ設けられており、各車輪FL,FR,RL,RRの回転に応じた周波数のパルス信号をブレーキECU60に出力している。
【0037】
CPUは、車両用制動制御プログラムを実行して上記各センサからの検出信号や、ハイブリッドECU19からの実回生実行値に基づき、液圧ブレーキ装置Bの電気モータMを制御するとともに、液圧ブレーキ装置Bの各制御弁31,32,33,35,36,41,42,43,45,46の状態を切り換え制御または通電電流制御しホイールシリンダWC1〜WC4に付与する制御液圧すなわち各車輪FL,FR,RL,RRに付与する制御液圧制動力を制御する。RAMは車両用制動制御プログラムの実行に必要な変数を一時的に記憶するものであり、ROMは車両用制動制御プログラムを記憶するものである。
【0038】
ブレーキECU60は、ハイブリッドECU19に互いに通信可能に接続されており、車両の全制動力が油圧ブレーキだけの車両と同等となるようにモータ12が行う回生ブレーキと油圧ブレーキの協調制御を行っている。具体的には、ブレーキECU60は、運転者の制動要求すなわちブレーキ操作状態に対して、ハイブリッドECU19に全制動力のうち回生ブレーキ装置の負担分である要求回生制動力の出力指令を指令する。ハイブリッドECU19は、入力した要求回生制動力の出力指令に基づいて車速やバッテリ充電状態等を考慮して実際に回生ブレーキとして作用させる実回生実行値を導出しその実回生実行値に相当する回生制動力を発生させるようにインバータ16を介してモータ12を制御するとともに、導出した実回生実行値をブレーキECU60に出力する。
【0039】
ここで、回生協調時において車両の速度減少に伴って回生制動力(図3にて回生の部分)が減少する場合、車両の全制動力が減少し、最終的に基礎液圧制動力(図3にてVB油圧の部分)のみしか得られない場合が生じる。この場合、回生制動力の代わりに制御液圧制動力を付与することにより(図3にてESC加圧の部分)、回生制動力の減少分を補償して全制動力を一定に維持することができる。このように回生制動力の代わりに制御液圧制動力を付与することを回生制動力と制御液圧制動力のすり替えという。このすり替えは回生制動力を使う限りは車両停止に至る前に必ず行われ、車両が使用されている間に行われる頻度が高いため、液圧ポンプ37,47を駆動する電気モータMは長寿命である必要があり、本実施形態の車両用制動制御プログラムでは、電気モータMの回転数を正常時はFB制御させて耐久性を向上させている。
【0040】
なお、図3において、このすり替えが生じる期間T1では、全制動力は一定であり変化はないが、液圧ポンプ37,47の作動により制御液圧を付与する関係でブレーキペダル21が大きく吸い込まれ、ドライバは違和感を感じるおそれがあった。これを防ぐために、すり替えが開始された時点から車両が停止する時点までの期間にて全制動力すなわち制御液圧制動力を減少させる制御(図3にてESC加圧の点線部分)を行うのが好ましい。これによれば、すり替え期間において発生させるべき制御液圧制動力を前述した場合と比較して小さく抑えることができるので、ブレーキペダル21の吸い込まれる量をドライバが感じない程度に抑制することができ、車両減速度の変動量もドライバが感じない程度に抑制することができる。
【0041】
ブレーキECU60は、記憶装置61を備えており、この記憶装置61には、車両用制動制御プログラムの実行に必要な例えば図9〜13に示すマップ、テーブルまたは演算式が記憶されている。図9は、ブレーキ操作に応じて発生するマスタシリンダ圧Pと、そのブレーキ操作量に応じた全制動力(基礎液圧制動力と回生制動力と必要な場合には制御液圧制動力との和で表される制動力)Fとの関係を示す。なお、マスタシリンダ圧に代えてブレーキペダル21のストロークと要求制動力との関係を示すマップ、テーブルまたは演算式を記憶するようにしてもよい。
【0042】
図11は、ブレーキ操作量に応じた回生制動力Frと回生ブレーキ装置Aが発生可能な回生制動力Fsとの差ΔFrsと、電気モータMの駆動により液圧ポンプ37,47から吐出されるブレーキ液による液圧制御弁31,41の制御液圧Plとの関係を示す。図11は、電気モータMの駆動により液圧ポンプ37,47から吐出されるブレーキ液による液圧制御弁31,41の制御液圧Plと、そのブレーキ液が供給されるホイールシリンダWC1,WC2,WC3,WC4における累積の液量Vlとの関係を示す。図12は、図11の累積の液量Vlの変動を示す。
【0043】
次に、車両用ブレーキ装置の作動を図4〜8フローチャートを参照して説明する。なお、ブレーキECU60は、例えば車両のイグニションスイッチ(図示省略)がオン状態にあるとき、上記フローチャートに対応したプログラムを所定の短時間毎に実行する。図4に示すように、ブレーキECU60は、初期化された後(ステップS101)、マスタシリンダ圧を検出する圧力センサP、ブレーキペダル21のストローク量を検出するペダルストロークセンサ21a等の各種センサ情報を入力する(ステップS102)。
【0044】
ブレーキECU60は、入力した各種センサ情報の中からブレーキ操作状態であるマスタシリンダ圧を読込む(ステップS103)。そして、読込んだマスタシリンダ圧に応じた要求される制動力(以下、要求制動力という)および基礎液圧制動力を演算し、演算した要求制動力および基礎液圧制動力に基づいて、要求される回生制動力(以下、要求回生制動力という)を演算する(ステップS104、本発明の「要求制動力演算手段」、「基礎液圧制動力演算手段」に相当する,105、本発明の「要求回生制動力演算手段」に相当する)。具体的には、予め記憶されている図9に示すブレーキ操作に応じて発生するマスタシリンダ圧Pと、そのブレーキ操作量に応じた全制動力Fとの関係に基づいて、先ず、読込んだマスタシリンダ圧Paに応じた要求制動力Faおよび基礎液圧制動力Fbaを求め、次に、求めた要求制動力Faから基礎液圧制動力Fbaを減算して要求回生制動力Fraを求める。
【0045】
ブレーキECU60は、求めた要求回生制動力を発生させるため、回生ブレーキ装置Aで発生する回生制動力の不足を補償する制御液圧制動力を発生させるために必要な制御液圧(以下、必要制御液圧という)を演算する(ステップS106、本発明の「制御液圧設定手段」に相当する)。具体的には、ブレーキECU60は、図5に示す必要制御液圧演算サブルーチンを実施する。すなわち、ブレーキECU60は、制動中であるか否かを判断し(ステップ201)、制動中でない場合は、回生制動力および必要制御液圧を“0”として(ステップ202,203)、ステップ201にリターンする。一方、ステップ201において、制動中である場合はさらに回生ブレーキ作動許可状態であるか否かを判断し(ステップ204)、回生ブレーキ作動許可状態でない場合は、回生制動力および必要制御液圧を“0”として(ステップ202,203)、ステップ201にリターンする。
【0046】
一方、ステップ204において、回生ブレーキ作動許可状態である場合は、ステップS105で求めた要求回生制動力と回生ブレーキ装置Aが現在発生可能な回生制動力(以下、現回生制動力という)とを比較し、要求回生制動力が現回生制動力よりも大きいか否かを判断する(ステップ205)。そして、要求回生制動力が現回生制動力以下である場合は、要求回生制動力は現回生制動力で充足するため、必要制御液圧を“0”として(ステップ206)、ステップ201にリターンする。
【0047】
この場合、ブレーキECU60は、要求回生制動力をハイブリッドECU19に出力する。そして、ハイブリッドECU19は、要求回生制動力を示す回生要求値を入力し、その値に基づいて車速やバッテリ充電状態等を考慮して回生制動力を発生させるようにインバータ16を介してモータ12を制御するとともに、現回生制動力を示す現回生実行値をブレーキECU60に出力する。このとき、車輪FL,FR,RL,RRには、基礎液圧制動力に回生制動力のみが上乗せされて付与される。
【0048】
一方、ステップ205において、要求回生制動力が現回生制動力よりも大きい場合は、要求回生制動力と現回生制動力との差に基づいて、必要制御液圧を求め(ステップ207)、ステップ201にリターンする。具体的には、要求回生制動力Fraと現回生制動力Fsaとの差ΔFrsaを求め、予め記憶されている図11に示すブレーキ操作量に応じた回生制動力Frと回生ブレーキ装置Aが発生可能な回生制動力Fsとの差ΔFrsと、電気モータMの駆動により液圧ポンプ37,47から吐出されるブレーキ液による液圧制御弁31,41の制御液圧Plとの関係に基づいて、必要制御液圧Plaを求める。
【0049】
図4に戻って、ブレーキECU60は、ステップ207で求めた必要制御液圧を、回生ブレーキ装置Aで発生する回生制動力の不足を補償する制御液圧制動力を発生させるために必要な液量(以下、必要液量という)に変換する(ステップS107)。具体的には、ブレーキECU60は、図6に示す必要液量変換サブルーチンを実施する。すなわち、ブレーキECU60は、必要制御液圧を読込み(ステップ301)、予め記憶されている図11に示す電気モータMの駆動により液圧ポンプ37,47から吐出されるブレーキ液による液圧制御弁31,41の制御液圧Plと、そのブレーキ液が供給されるホイールシリンダWC1,WC2,WC3,WC4における累積の液量Vlとの関係に基づいて、求めた必要制御液圧Plaを必要液量Vlaに変換し(ステップ302)、ステップ301にリターンする。
【0050】
図4に戻って、ブレーキECU60は、ステップ302で変換した必要液量に基づいて必要流量を演算する(ステップS108)。具体的には、ブレーキECU60は、図7に示す必要液流量演算サブルーチンを実施する。すなわち、図12に示すように、ブレーキECU60は、所定時間毎、例えば時点taの必要液量Vlaaと時点tbの必要液量Vlabを読込み(ステップ401)、所定時間tb−taにおける必要液量の変化量Vlab−Vlaaを演算する(ステップ402)。そして、求めた必要液量の変化量Vlab−Vlaaを必要流量Wlとし(ステップ403)、ステップ401にリターンする。
【0051】
図4に戻って、ブレーキECU60は、ステップ403で求めた必要流量に基づいて液圧ポンプ37,47の吐出流量を演算する(ステップS109)。具体的には、ブレーキECU60は、必要流量Wlに液圧制御弁31,41の作動に必要なリリーフ流量Wrを加算してポンプ吐出流量(Wl+Wr)とする。ブレーキECU60は、求めたポンプ吐出流量に基づいて電気モータMの必要モータ回転数を演算する(ステップS110、本発明の「FB制御目標回転数設定手段」に相当する)。具体的には、ブレーキECU60は、図8に示す必要モータ回転数演算サブルーチンを実施する。すなわち、ブレーキECU60は、ポンプ吐出流量(Wl+Wr)を読込み(ステップ501)、読込んだポンプ吐出流量(Wl+Wr)に流量−回転数変換係数kを乗算して電気モータMの必要モータ回転数k(Wl+Wr)とし(ステップ502)、ステップ501にリターンする。この流量−回転数変換係数kは、電気モータMの1回転当りの液圧ポンプ37,47のポンプ吐出流量を表す係数である。
【0052】
図4に戻って、ブレーキECU60は、電気モータMがストールしない最低必要回転数(以下、ストール回転数という)を演算する(ステップS111)。
【0053】
ここで、液圧ポンプ37,47の回転は、電気モータMの回転と相関関係にあり、制御液圧と制御液流量との乗算値で表される液圧ポンプ37,47がする仕事量(負荷)は、電気モータMがする仕事量(負荷)と相関関係にある。液圧ポンプ37,47における制御液圧と制御液流量との乗算値は、電気モータMの駆動により液圧ポンプ37,47に掛かる負荷と等価である。そして、電気モータMがする仕事量は、電気モータMがストールしない最低必要回転数と相関関係にある。よって、電気モータMの駆動により液圧ポンプ37,47に掛かる負荷は、電気モータMのストール回転数を、電気モータMの駆動により液圧ポンプ37,47に掛かる負荷を考慮して演算することができる。
【0054】
図4に戻って、ブレーキECU60は、ステップ502で求めた必要モータ回転数とストール回転数とを比較し、回転数が大きい方を目標回転数として選択する(ステップS112)。そして、選択した目標回転数に基づいて電気モータMを駆動し(ステップS113)、ステップS102に戻って上述の処理を繰り返す。液圧ブレーキ装置Bは、マスタシリンダ圧に応じた基礎液圧制動力、および目標回転数に応じた制御液圧制動力を付与し、回生ブレーキ装置Aは、現回生制動力を付与する。これにより、車輪には基礎液圧制動力に制御液圧制動力および回生制動力を上乗せした全制動力が付与されることになる。
【0055】
次に、ブレーキECU60が電気モータMのフィードバック制御を行う際の動作を説明する。ブレーキECU60は、図13に示す制御液圧発生制御装置100を備える。
【0056】
制御液圧発生制御装置100は、回転数検出装置101と、FB制御部102と、FF制御目標回転数演算部103と、FF制御部104と、モータ異常判定部105と、選択部106と、FET(Field Effect Transistor)107と、電流逆流防止用のダイオード108とを備えて構成されている。回転数検出装置101は、シャント抵抗器110と、電流検出回路111と、モータ回転数演算部112とを備えて構成されている。また、モータ回転数演算部112、FB制御部102、FF制御目標回転数演算部103、FF制御部104、モータ異常判定部105及び選択部106は、ブレーキECU60のCPU109によるソフトウエアにより構成されている。
【0057】
電気モータMは、その配線の一端がモータ駆動回路としてのFET107のソース−ドレイン間を介してバッテリ17に接続されており、他端がシャント抵抗器110を介して接地されている。電流検出回路111は、シャント抵抗器110の両端の電流を検出することにより電気モータMの負荷電流を検出し、この検出電流に応じて波形成形したパルス波形信号PSをモータ回転数演算部112及びモータ異常判定部105へ出力する。モータ回転数演算部112は、入力されるパルス波形信号PSから電気モータMの回転数を演算し、この演算されたモータ回転数FBm[rpm]をFB制御部102へ出力する。
【0058】
但し、電気モータMは、例えばブラシ及びコミュテータを介してバッテリ17からの直流電流が供給されることにより回転するブラシ付き直流電気モータである。このブラシ付き直流電気モータの場合、回転数検出装置101は、ブラシとコミュテータとの間の断続によって電気モータMへの供給電流に単位時間に発生するリップル成分を計数することによりモータ回転数FBmを検出する。
【0059】
次に、そのモータ回転数FBmの演算について図14を参照して説明する。まず、電流検出回路111からパルス波形PSa,PSb,PScを有するパルス波形信号PSが出力されているとする。モータ回転数演算部112は、そのパルス波形信号PSの立ち上がりエッジを例えば時刻t12〜t13に示す一定周期(サンプリング周期)ΔTでサンプリングする。ここでサンプリング周期ΔTは次式(1)となる。
ΔT=Tp(n)−Tp(n−1) …(1)
【0060】
次に、モータ回転数演算部112は、そのサンプリング周期ΔTでサンプリングしたパルス波形信号PSbの1パルス当りの時間間隔Δtを求める。このΔtは次式(2)となる。
Δt=ΔT/Np(n) …(2)
【0061】
但し、Np(n)は1サンプリング周期ΔTでの立ち上がりエッジのサンプリング数であり、この例ではNp(n)=2となる。
【0062】
ここで、1パルス当りの時間間隔Δtの逆数、即ち1/Δtを電気モータMのスロット数で割る{(1/Δt)÷スロット数}と、1秒[s]当りのモータ回転数が求まる。従って、1分間当りのモータ回転数FBm[rpm]は、次式(3)で求められる。
FBm[rpm]=(1/Δt)÷スロット数×60[s] …(3)
【0063】
FB制御部102では、そのように演算されるモータ回転数FBmと、FB制御目標回転数との差分が取られ、この差分に応じた補正量をモータ回転数に応じた基礎電圧に加算した駆動電圧が、電気モータMの駆動回路であるFET107のゲートへ供給されてフィードバック制御が行われる。
【0064】
一方、FF制御目標回転数演算部103では、FB制御目標回転数より所定の余裕回転数だけ高いFF制御目標回転数としてモータ回転数FFmが演算され、電気モータMがそのモータ回転数FFmとなるように、FF制御部104からの電圧が、FET107のゲートへ供給されてフィードフォワード制御が行われる。
【0065】
モータ異常判定部105は、パルス波形信号PSからモータ回転数の検出状態が正常か異常かを判定する。この判定は、パルス波形信号PSの時間幅(周期)が予め定められた正常範囲内であれば検出したモータ回転数FBmが正常であり、正常範囲外(パルス波形が出ない場合も含む)であれば異常と判定する。正常と判定した際に「L」レベルの検出信号Ds、異常と判定した際に「H」レベルの検出信号Dsを選択部106へ出力する。
【0066】
選択部106は、モータ異常判定部105から「L」レベルの検出信号Dsが供給されている場合は、FB制御部102からの信号を選択し、「H」レベルの検出信号Dsが供給された際にFF制御部104からの信号を選択する。
【0067】
即ち、モータ異常判定部105で正常と判定されている場合は、選択部106に「L」レベルの検出信号Dsが供給される。この選択部106ではFB制御部102からの上記駆動電圧が選択され、この駆動電圧が選択部106を介してFET107のゲート端へ印加されることにより、バッテリ17からの電力が電気モータMへ供給され、電気モータMがFB制御目標回転数となるようにフィードバック制御される。
【0068】
一方、モータ異常判定部105で異常と判定された場合は、選択部106に「H」レベルの検出信号Dsが供給されるので、選択部106ではFF制御部104でフィードフォワード制御用のモータ回転数に応じた基礎電圧による駆動電圧が選択され、この駆動電圧が選択部106を介してFET107のゲート端へ印加されることにより、バッテリ17からの電力が電気モータMへ供給され、電気モータMがFF制御目標回転数となるようにフィードフォワード制御される。
【0069】
次に、このようなフィードバック制御又はフィードフォワード制御により回転する電気モータMで液圧ポンプ37,47が駆動され、この駆動と液圧制御弁31,41の制御とによって形成される制御液圧による制動力発生時の動作を、図15を参照して説明する。但し、図15は図13に示したCPU109がフィードバック制御及びフィードフォワード制御を行う際のロジックブロック図である。
【0070】
まず、フィードバック制御時の制御液圧制動力発生時の動作を説明する。ブレーキ操作状態に対応した基礎液圧がマスタシリンダ23にて発生すると、この基礎液圧とは独立して液圧ポンプ37,47の駆動と液圧制御弁31,41の制御によって形成される制御液圧が、各ホイールシリンダWC1〜WC4に付与されて各車輪FL〜RRに制御液圧制動力が発生する(上記図4のS101〜S105に対応)。この際、図15のCPU109においては、その制御液圧P1[Mpa]とマスタシリンダ液圧(M/C液圧)P2[Mpa]とが制御ステップB1で加算され、制御ステップB2において、その加算液圧P3[Mpa]の一定時間間隔における前回と今回の加算液圧の差が求められ、この差分液圧が制御液圧制動力に必要な要求液圧P4[Mpa](S106に対応)となる。
【0071】
次に、制御ステップB3で要求液圧P4[Mpa]が要求液量L1[cc]に変換される(S107に対応)。この変換で得られた要求液量L1[cc]が、更に制御ステップB4で1秒間の流量である要求流量Q1[cc/s]に変換される(S108に対応)。この要求流量Q1[cc/s]は、ホイールシリンダWC1〜WC4への必要流量であるが、これは一方で液圧制御弁31,41を通してリリーフしながら調圧しているので、常に一定に液圧制御弁31,41から制御液圧をリリーフする必要がある。そこで、制御ステップB5において、上記制御ステップB4で得られた要求流量Q1[cc/s]に、液圧制御弁31,41の作動に必要なリリーフ流量Q2[cc/s]が加算されて、液圧ポンプ37,47の必要な汲み上げ流量Q3[cc/s]が得られる(S109に対応)。
【0072】
一方、制御ステップB6において、上記制御ステップB2で得られた要求液圧P4[Mpa]から液圧ポンプ37,47の圧力の負荷LO(=P4[Mpa])が推定される。一方、制御ステップB7では、液圧ポンプ負荷LOとポンプ効率E1〔cc/rev〕との間に予め定められている関係と、推定した負荷LO=P4とから現時点のポンプ負荷に対応したポンプ効率E1〔cc/rev〕が流量と回転数とを変換するための係数として求められる。制御ステップB8において、汲み上げ流量Q3[cc/s]をポンプ効率E1[cc/rev]で割ることで、必要な電気モータMの必要回転数R1[rpm]が得られる(S110に対応)。
【0073】
次に、制御ステップB9において、そのモータ必要回転数R1[rpm]と、電気モータMがストールしない最低回転数であるストール回転数R2[rpm](S111に対応)とが比較され、回転数が大きい方が目標回転数として選択される。
【0074】
ここで、図15に示す選択部106には、モータ異常判定部105でモータ回転数の検出状態が正常であれば検出信号Dsの「L」レベルが供給されているので、選択部106は実線側のフィードバック制御側を選択している。この場合、制御ステップB10において、制御ステップB9で選択された例えばモータ必要回転数R1[rpm]に、FBモータバラツキ倍率k1(例えば1.1倍)が乗算され、この乗算結果が、制御ステップB11でFB制御目標回転数とされる(S112に対応)。
【0075】
制御ステップB14において、電気モータMがそのFB制御目標回転数に応じた基礎電圧が制御ステップB13に供給される。
【0076】
このFB制御目標回転数は、制御ステップB12において、回転数検出装置101で検出された実際のモータ回転数FBmとの差分が演算される。この差分に応じた電圧による補正量が、制御ステップB13で先の基礎電圧と加算されて駆動電圧とされ、この駆動電圧がモータ駆動回路としてのFET107のゲートへ供給され、これによって電気モータMがフィードバック制御され、FB制御目標回転数で駆動する(S113に対応)。
【0077】
次に、モータ異常判定部105で、モータ回転数の検出状態が異常と判定された際に、フィードバック制御からフィードフォワード制御に切替えられた際の動作を、図15及び図16を参照して説明する。
【0078】
モータ異常判定部105でモータ回転数の検出状態が異常と判定されると、図15に示す選択部106には「H」レベルの検出信号Dsが供給されるので、選択部106は、破線側のフィードフォワード制御側に切り替わる。これによって、制御ステップB10では、制御ステップB9で選択されたモータ必要回転数R1[rpm]に、FBモータバラツキ倍率k1よりも所定値高いFFモータバラツキ倍率k2(例えば1.5倍)が乗算され、この乗算結果が、制御ステップB11でFF制御目標回転数とされる(S112に対応)。
【0079】
但し、FFモータバラツキ倍率k2は、少なくともモータ初期条件、モータ耐久劣化、汲み上げ流量であるモータ吐出圧、モータ温度を考慮して得られる。そして、FF制御目標回転数は、必要最低限のリリーフ流量Q2[cc/s]を流すために、そのFFモータバラツキ倍率k2を考慮した回転数となっている。
【0080】
つまり、FB制御目標回転数より所定の余裕回転数だけ高いFF制御目標回転数が演算され、制御ステップB14において、電気モータMがそのFF制御目標回転数に応じたモータ回転数FFmとなるように、FF制御部104からの基礎電圧が駆動電圧として、FET107のゲートへ供給されるフィードフォワード制御が行われる(S113に対応)。この場合、制御ステップB12のFB制御部102からの補正量はゼロである。従って、制御ステップB13では、制御ステップB14によるFF制御目標回転数に応じた電圧のみが選択される。
【0081】
これと同時にフィードフォワード制御への切替え時には、ブレーキECU60に設けられた図16に示す異常時制御液圧発生制御装置130によって液圧制御弁31,41への制御電流を次のように供給する制御を行う。
【0082】
即ち、異常時制御液圧発生制御装置130は、モータ回転数推定部132と、流量演算部133と、制御電流補正演算部134とを備えて構成されている。モータ回転数推定部132は、上記フィードフォワード制御への切替え時に、制御ステップB11で得られたFF制御目標回転数に応じて徐々に上がるモータ回転数を推定する。流量演算部133は、その推定モータ回転数に応じた液圧ポンプ37,47での汲み上げ流量に応じて徐々に増加する液圧制御弁31,41の通過流量を推定する。
【0083】
制御電流補正演算部134は、その推定通過流量に応じて液圧制御弁31,41の絞りを開閉制御する制御電流を演算する。即ち、電気モータMの応答と、液圧制御弁31,41の通過流量の応答とを考慮して液圧制御弁31,41の制御電流を次のように制御する。これは、電気モータMがFB制御目標回転数よりも余裕回転数だけ高いFF制御目標回転数で回転されることにより液圧制御弁31,41を通過するブレーキ液が漸増しても、ホイールシリンダ液圧が変化しないように、液圧制御弁31,41に印加する制御電流を漸次変化させるように制御する。
【0084】
但し、電気モータMの応答は、一般的に知られている機械的時定数から求める。機械的時定数は、液圧ポンプ37,47のポンプ負荷、フルード粘性、電気モータMの負荷に応じて変化するモータ温度に応じて求める。それらポンプ負荷は圧力センサPによりポンプ圧力を検出して求め、フルード粘性、モータ温度は、モニタ又は推定により求める。
【0085】
また、液圧制御弁31,41の通過流量の応答は、液圧ポンプ37,47から液圧制御弁31,41までの間の配管径、配管長、フルード粘性、フルード密度、オリフィス径などによる油圧回路から、その流量の遅れを算出する。
【0086】
このような異常時制御液圧発生制御装置130の動作を説明する。まず、図17(a)に時刻t1で示すフィードバック制御からフィードフォワード制御への切替え時に、モータ回転数推定部132により、制御ステップB11で得られたFF制御目標回転数に応じて、図17(b)に曲線r2で示す徐々に上がるモータ回転数が推定される。
【0087】
次に、流量演算部133により、その推定モータ回転数r2に応じた液圧ポンプ37,47での汲み上げ流量に応じて、(b)に曲線q2で示す徐々に増加する液圧制御弁31,41の通過流量が推定される。そして、制御電流補正演算部134により、その推定通過流量q2に応じて液圧制御弁31,41の絞りを開閉制御する制御電流が、図17(c)に徐々に下がる曲線i2で示すように演算される。即ち、電気モータMがFF制御目標回転数で回転されることにより液圧制御弁31,41を通過するブレーキ液が曲線q2のように漸増しても、図17(d)に線wc2で示すようにホイールシリンダ液圧が変化しない、言い換えればホイールシリンダ液圧wc2が一定となるように、制御電流i2が漸次変化される。
【0088】
このように本実施形態の車両用ブレーキ装置によれば、フィードバック制御からフィードフォワード制御への切替え時に、ホイールシリンダ液圧wc2が変化しないように、液圧制御弁31,41への制御電流i2を制御することができる。従って、液圧ポンプ37,47の汲み上げ流量と液圧制御弁31,41の開口度合に従来のようにずれが生じることがなくなるので、運転者がブレーキ操作時にホイールシリンダ液圧がスムーズに変化して、運転者がブレーキ操作時に違和感を感じるということが無くなる。
【0089】
また、少なくとも液圧ポンプ37,47のポンプ負荷に応じて機械的時定数を切り替え、この機械的時定数を用いて電気モータMの応答を求め、また、少なくとも液圧ポンプ37,47から液圧制御弁31,41までの間の流路抵抗及びブレーキ液の粘性に応じて液圧制御弁31,41の通過流量の応答を求め、これら応答をモータ回転数の推定並びに液圧制御弁31,41の通過流量の推定に反映させるようにした。従って、モータ回転数の推定精度がより高くなって、液圧制御弁31,41の通過流量をより高精度に推定できるので、液圧制御弁31,41への制御電流をより適正に可変制御してホイールシリンダ液圧を一定に制御することができる。
【0090】
上記実施形態に係る車両用ブレーキ装置では、液圧ブレーキ装置Bと回生ブレーキ装置Aとを協調制御しているが、本発明に係る車両用ブレーキ装置は、下記のようなトラクションコントロール装置、ブレーキアシスト制御装置、坂道発進制御装置、アクティブクルーズコントロール装置などを備えた車両用ブレーキ装置としても使用することができる。即ち、車両の走行状態に応じて要求される制動力を車輪に付与するために、電気モータを目標回転数で回転させて液圧ポンプから液圧制御弁の作動に必要なリリーフ流量のブレーキ液を液圧制御弁に循環させるとともに、液圧制御弁に制御電流を印加することによって、液圧制御弁に要求性動力に応じて設定された制御液圧を発生させる上記の制御液圧発生装置を備えた車両用ブレーキ装置として用いることができる。
【0091】
トラクションコントロールは、駆動輪FL,FRのスリップ量が所定値を超え且つ増加するときは、制御液圧発生装置から駆動輪FL,FRのホイールシリンダWC1,WC2に液圧を供給し、この液圧をスリップ量に応じて液圧制御弁31,41により制御し、スリップ量が所定値を超え且つ増加しないときは、圧力発生装置を停止し、駆動輪FL,FRのホイールシリンダWC1,WC2にスリップ量に応じて液圧制御弁31,41により制御される液圧を封止し、スリップ量が所定値以下のときは駆動輪FL,FRのホイールシリンダWC1,WC2を調圧リザーバ34,44に接続し、これによりブレーキ手段にスリップ量に応じた液圧制動力を車輪に付与させる制御である。
【0092】
ブレーキアシスト制御は、緊急にブレーキを掛けた場合や、強い制動力を発生させる場合などに、圧力発生装置から駆動輪FL,FRのホイールシリンダWC1,WC2に液圧を供給し、この液圧をマスタシリンダ23から供給される液圧より大きい液圧に液圧制御弁31,41によって制御し、これによりブレーキ手段に大きい液圧制動力を車輪に付与させる制御である。
【0093】
坂道発進制御は、坂道での発進時に、圧力発生装置から駆動輪FL,FRのホイールシリンダWC1,WC2に液圧を供給し、この液圧を液圧制御弁31,41により停止保持液圧に制御し、これによりブレーキ手段に車両を坂道に停止保持する液圧制動力を車輪に付与させる制御である。
【0094】
アクティブクルーズコントロールは、車間距離を所定値以上に保つために、圧力発生装置から駆動輪FL,FRのホイールシリンダWC1,WC2に液圧を供給し、この液圧を液圧制御弁31,41により制御し、車間距離が所定値以下になるとブレーキ手段に自動的に液圧制動力を車輪に付与させる制御である。
【0095】
上記実施形態では、液圧ブレーキ装置Bのブレーキ配管系は、FF車に前後配管しているが、FR車に前後配管してもよい。また、倍力装置として負圧式ブースタ22を用いているが、ポンプにより発生した液圧をアキュムレータに蓄圧し、この液圧を利用して倍力する倍力装置を用いてもよい。
【符号の説明】
【0096】
11…エンジン、12…モータ、13…動力分割機構、14…動力伝達機構、15…発電機、16…インバータ、17…バッテリ、18…エンジンECU、19…ハイブリッドECU、21…ブレーキペダル、21a…ペダルストロークセンサ、22…負圧式ブースタ、23…マスタシリンダ、23d…第1液圧室、23f…第2液圧室、24…リザーバタンク、25…ブレーキアクチュエータ、31,41…液圧制御弁、32,33,42,43…増圧制御弁、35,36,45,46…減圧制御弁、34,44…調圧リザーバ、37,47…ポンプ、60…ブレーキECU、61…記憶装置、100…制御液圧発生制御装置、101…回転数検出装置、102…FB制御部、103…FF制御目標回転数演算部、104…FF制御部、105…モータ異常判定部、106…選択部、107…FET、108…ダイオード、110…シャント抵抗器、111…電流検出回路、112…モータ回転数演算部、130…異常時制御液圧発生制御装置、132…モータ回転数推定部、133…流量演算部、134…制御電流補正演算部、A…回生ブレーキ装置、B…液圧ブレーキ装置、BK1,BK2,BK3,BK4…ブレーキ手段、FR,FL,RR,RL…車輪、Lf,Lr…油経路、M…電気モータ、P…圧力センサ、Sfl,Sfr,Srl,Srr…車輪速センサ、WC1,WC2,WC3,WC4…ホイールシリンダ。
【特許請求の範囲】
【請求項1】
ブレーキ操作に応じたマスタシリンダ液圧を発生するマスタシリンダと、
各車輪に設けられ、ホイールシリンダに前記マスタシリンダからブレーキ液が供給されることによって前記車輪に制動力を付与する車輪ブレーキ装置と、
前記マスタシリンダと前記ホイールシリンダとの間に接続された液圧制御弁と、
前記液圧制御弁と前記ホイールシリンダとの間に吐出ポートが連通され、前記マスタシリンダと前記液圧制御弁との間に吸入ポートが連通された液圧ポンプと、
前記液圧ポンプを駆動する電気モータと、
前記電気モータのモータ回転数を検出する回転数検出装置と、
前記電気モータのFB制御目標回転数に応じた制御電力を、前記回転数検出装置で検出された前記モータ回転数と前記電気モータのFB制御目標回転数との差に応じて補正して前記電気モータの駆動回路に供給するフィードバック制御回路と、
前記電気モータのFF制御目標回転数に応じた制御電力を前記駆動回路に供給するフィードフォワード制御回路と、
前記電気モータを前記フィードバック制御回路によってFB制御目標回転数で回転させて前記液圧ポンプから目標流量のブレーキ液を前記液圧制御弁に循環させるとともに、前記液圧制御弁に制御電流を供給することによって、前記ホイールシリンダに生じるホイールシリンダ液圧が前記マスタシリンダ液圧より制御液圧だけ高くなるように制御する制御液圧発生制御装置と、
前記回転数検出装置の異常が異常検出装置によって検出されると、前記電気モータを前記フィードフォワード制御回路によって前記FB制御目標回転数より余裕回転数だけ高いFF制御目標回転数で回転させるとともに、前記電気モータが前記余裕回転数だけ高いFF制御目標回転数で回転されることにより前記液圧制御弁を通過する前記ブレーキ液が漸増させ、前記ホイールシリンダ液圧が変化しないように、前記液圧制御弁に供給する前記制御電流を漸次変化させる異常時制御液圧発生制御装置と、
を備える車両用ブレーキ装置。
【請求項2】
請求項1において、
回生制動力を前記車輪に発生させる回生ブレーキ装置と、
前記ブレーキ操作量に応じた要求制動力を演算する要求制動力演算手段と、
前記マスタシリンダ液圧によって発生する基礎液圧制動力を演算する基礎液圧制動力演算手段と、
前記要求制動力から前記基礎液圧制動力を減算して要求回生制動力を演算する要求回生制動力演算手段と、
前記要求回生制動力と前記回生ブレーキ装置が現在発生可能な現回生制動力との差に基づいて前記制御液圧を設定する制御液圧設定手段と、
前記制御液圧の変化に基づいて前記ホイールシリンダに供給されるブレーキ液量及び前記液圧制御弁の作動に必要なリリーフ流量に基づいて前記電気モータのFB制御目標回転数を設定するFB制御目標回転数設定手段と、
を備える車両用ブレーキ装置。
【請求項3】
請求項1又は2において、
前記電気モータは、ブラシ及びコミュテータを介して直流電流を供給されることにより回転するブラシ付き直流電気モータであり、
前記回転数検出装置は、前記ブラシと前記コミュテータとの間の断続によって前記電気モータへの供給電流に単位時間に発生するリップル成分を計数することにより前記電気モータのモータ回転数を検出する車両用ブレーキ装置。
【請求項4】
請求項1乃至3のいずれか一項において、
前記電気モータが前記余裕回転数だけ高いFF制御目標回転数で回転されることにより前記液圧制御弁を通過する前記ブレーキ液が漸増する時定数を、少なくとも前記液圧ポンプの負荷を考慮して演算したモータ応答の時定数と、少なくとも前記液圧ポンプから前記ブレーキ液を前記液圧制御弁に循環させる配管回路の流路抵抗及び前記ブレーキ液の粘性を考慮して演算した流量応答の時定数に基づいて演算する車両用ブレーキ装置。
【請求項1】
ブレーキ操作に応じたマスタシリンダ液圧を発生するマスタシリンダと、
各車輪に設けられ、ホイールシリンダに前記マスタシリンダからブレーキ液が供給されることによって前記車輪に制動力を付与する車輪ブレーキ装置と、
前記マスタシリンダと前記ホイールシリンダとの間に接続された液圧制御弁と、
前記液圧制御弁と前記ホイールシリンダとの間に吐出ポートが連通され、前記マスタシリンダと前記液圧制御弁との間に吸入ポートが連通された液圧ポンプと、
前記液圧ポンプを駆動する電気モータと、
前記電気モータのモータ回転数を検出する回転数検出装置と、
前記電気モータのFB制御目標回転数に応じた制御電力を、前記回転数検出装置で検出された前記モータ回転数と前記電気モータのFB制御目標回転数との差に応じて補正して前記電気モータの駆動回路に供給するフィードバック制御回路と、
前記電気モータのFF制御目標回転数に応じた制御電力を前記駆動回路に供給するフィードフォワード制御回路と、
前記電気モータを前記フィードバック制御回路によってFB制御目標回転数で回転させて前記液圧ポンプから目標流量のブレーキ液を前記液圧制御弁に循環させるとともに、前記液圧制御弁に制御電流を供給することによって、前記ホイールシリンダに生じるホイールシリンダ液圧が前記マスタシリンダ液圧より制御液圧だけ高くなるように制御する制御液圧発生制御装置と、
前記回転数検出装置の異常が異常検出装置によって検出されると、前記電気モータを前記フィードフォワード制御回路によって前記FB制御目標回転数より余裕回転数だけ高いFF制御目標回転数で回転させるとともに、前記電気モータが前記余裕回転数だけ高いFF制御目標回転数で回転されることにより前記液圧制御弁を通過する前記ブレーキ液が漸増させ、前記ホイールシリンダ液圧が変化しないように、前記液圧制御弁に供給する前記制御電流を漸次変化させる異常時制御液圧発生制御装置と、
を備える車両用ブレーキ装置。
【請求項2】
請求項1において、
回生制動力を前記車輪に発生させる回生ブレーキ装置と、
前記ブレーキ操作量に応じた要求制動力を演算する要求制動力演算手段と、
前記マスタシリンダ液圧によって発生する基礎液圧制動力を演算する基礎液圧制動力演算手段と、
前記要求制動力から前記基礎液圧制動力を減算して要求回生制動力を演算する要求回生制動力演算手段と、
前記要求回生制動力と前記回生ブレーキ装置が現在発生可能な現回生制動力との差に基づいて前記制御液圧を設定する制御液圧設定手段と、
前記制御液圧の変化に基づいて前記ホイールシリンダに供給されるブレーキ液量及び前記液圧制御弁の作動に必要なリリーフ流量に基づいて前記電気モータのFB制御目標回転数を設定するFB制御目標回転数設定手段と、
を備える車両用ブレーキ装置。
【請求項3】
請求項1又は2において、
前記電気モータは、ブラシ及びコミュテータを介して直流電流を供給されることにより回転するブラシ付き直流電気モータであり、
前記回転数検出装置は、前記ブラシと前記コミュテータとの間の断続によって前記電気モータへの供給電流に単位時間に発生するリップル成分を計数することにより前記電気モータのモータ回転数を検出する車両用ブレーキ装置。
【請求項4】
請求項1乃至3のいずれか一項において、
前記電気モータが前記余裕回転数だけ高いFF制御目標回転数で回転されることにより前記液圧制御弁を通過する前記ブレーキ液が漸増する時定数を、少なくとも前記液圧ポンプの負荷を考慮して演算したモータ応答の時定数と、少なくとも前記液圧ポンプから前記ブレーキ液を前記液圧制御弁に循環させる配管回路の流路抵抗及び前記ブレーキ液の粘性を考慮して演算した流量応答の時定数に基づいて演算する車両用ブレーキ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−6526(P2013−6526A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−140655(P2011−140655)
【出願日】平成23年6月24日(2011.6.24)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月24日(2011.6.24)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]