
車両用変速機のシフト操作検査装置
【課題】車両用自動変速機の組立ラインにおいて、完成品の検査としてシフト動作の操作力および操作量である操作角度の良否判定を、同時に且つ自動で計測可能な車両用変速機のシフト操作検査装置を提供すること。
【解決手段】自動変速機21に装着されたコントロールレバー23に対して、係合および離脱可能な検査ユニット13と、該検査ユニットを回転せしめる回転アクチュエータ15と、該回転アクチュエータおよび検査ユニットを昇降支持する検査基台3とを備え、検査ユニット13にエンコーダ59とロードセル57とが取り付けられるとともに、検査ユニット13は、回転アクチュエータ15によって回転駆動される揺動アーム部材45、所定の遊び角度を有して揺動アーム部材45と同軸的に回転するガイド部材53を有し、ガイド部材53を介してコントロールレバー23を回転させて操作力および操作量を計測する。
【解決手段】自動変速機21に装着されたコントロールレバー23に対して、係合および離脱可能な検査ユニット13と、該検査ユニットを回転せしめる回転アクチュエータ15と、該回転アクチュエータおよび検査ユニットを昇降支持する検査基台3とを備え、検査ユニット13にエンコーダ59とロードセル57とが取り付けられるとともに、検査ユニット13は、回転アクチュエータ15によって回転駆動される揺動アーム部材45、所定の遊び角度を有して揺動アーム部材45と同軸的に回転するガイド部材53を有し、ガイド部材53を介してコントロールレバー23を回転させて操作力および操作量を計測する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、トランスミッション(車両用変速機)の組立工程において完成品のトランスミッションのシフト操作力およびコントロールレバーの操作角度の良否判定を自動で行うシフト操作検査装置に関し、特に、車両用自動変速機のシフト操作検査装置に関する。
【背景技術】
【0002】
車両用変速機のシフト操作力、操作量を検出してシフトフィーリングを評価するものとして特許文献1(特開昭63−249036号公報)が知られている。また、車両用変速機のシフト操作力、操作量を検出してシフト操作力をアシスト制御するものとして特許文献2(特開2006−22863号公報)が知られている。
【0003】
特許文献1は、手動トランスミッションのコントロールレバーに作用する荷重およびレバーのストロークを基にコントロールレバーに加えられた力積や仕事量を求めることによってシフトフィーリングが評価される。
また、特許文献2は、車両用自動変速装置のレンジを切り換えるコントロールレバーの操作力をアシストするモータの駆動力を、コントロールレバーの移動位置を検出するポジション検出手段からの信号と、コントロールレバーの操作力を検出するトルクセンサからの信号とに基づいて制御する。
【0004】
一方、車両用変速機の組立工程においては、完成されたトランスミッションが所定のシフト動作の操作力やコントロールレバーの操作角度を満たしているかどうかを検査する検査工程が設けられ、完成品の検査を行っている。この検査工程においては検査に要する時間を短縮して組立ラインの生産性を向上させるために、自動化によって効率的に検査を行う検査装置および検査方法について種々の工夫がなされている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開昭63−249036号公報
【特許文献2】特開2006−22863号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前記特許文献1に示されるシフトフィーリング評価方法や、特許文献2に示される車両用自動変速装置のアシスト力制御方法は、シフト操作力、コントロールレバーの操作量を検出してこれら信号に基づいて制御や評価がなされるものであり、トランスミッションの組立工程における検査として用いる技術ではなく、特に、特許文献1におけるフィーリング評価手法は、トランスミッションの開発段階で用いる評価方法であり、トランスミッションの検査工程における検査装置としては適用されない。
【0007】
また、前記したように車両用変速機の組立工程においては、完成されたトランスミッションが所定のシフト動作の操作力や操作角度を満たしているかどうかを検査する検査工程が設けられて完成品の検査を行っているが、この検査工程においては検査に要する時間を短縮して組立ラインの生産性の向上の観点から、自動化によって効率的に検査を行う必要があり、シフト動作の操作力や操作角度を自動で短時間に計測可能な検査装置が望まれている。
【0008】
本発明は、かかる従来技術の課題に鑑み、車両用自動変速機の組立ラインにおいて、完成品の検査としてシフト動作の操作力およびシフト操作量である操作角度の良否判定を、同時に且つ自動で計測可能な車両用変速機のシフト操作検査装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
かかる目的を達成するため、本発明は、運転者が操作する変速操作レバーに連動して回転し自動変速機内の機械要素を動かし変速動作を行うコントロールレバーを有する自動変速機のシフト操作力とシフト操作量とを計測する車両用変速機のシフト操作検査装置において、搬送手段によって搬送されて所定位置に固定された前記自動変速機の装着されたコントロールレバーに対して、係合および離脱可能な検査ユニットと、該検査ユニットに連結し検査ユニットを回転せしめる回転アクチュエータと、該回転アクチュエータおよび検査ユニットを昇降自在に支持する検査基台とを備え、前記検査ユニットは、前記回転アクチュエータによって回転駆動される揺動アーム部材と、該揺動アーム部材の回転中心軸周りに一定の遊び角度を有して該揺動アーム部材と一体回転可能なガイド部材と、前記揺動アーム部材と前記ガイド部材が一体的に同軸回転をする際に回転アクチュエータの回転力を前記コントロールレバーに伝達するレバー係合部と、コントロールレバーに作用する回転力を計測するロードセルと、揺動アーム部材とガイド部材との相対回転角度を計測するエンコーダとを有して構成され、回転アクチュエータおよびエンコーダによってシフト操作量である各変速ポジションの割出角度を計測するとともに、前記ロードセルによってシフト操作力を計測することを特徴とする。
【0010】
本発明によれば、自動変速機の本体に装着されるコントロールレバーに対して、着脱可能に検査ユニットが係合するとともに、この検査ユニットは、前記回転アクチュエータによって回転駆動される揺動アーム部材と、該揺動アーム部材の回転中心軸周りに一定の遊び角度を有して該揺動アーム部材と一体回転可能なガイド部材と、前記揺動アーム部材と前記ガイド部材が一体的に同軸回転をする際に回転アクチュエータの回転力を前記コントロールレバーに伝達するレバー係合部とを有して構成されるので、回転アクチュエータの作動角度が直接コントロールレバーの回転角度として作用せず、変速機内部に設けられたディテントプレートと該ディテントプレートの谷にディテントスプリング力で係合するディテント係止部材の係合(図2参照)を前記の遊び角度内で可能として、ディテントプレートの係止位置を基準とした回転角度の計測が可能になる。その結果、シフト操作量であるコントロールレバーの各変速ポジションの割り出し位置を正確に検出できる。
【0011】
すなわち、回転アクチュエータの回転力が遊び角度なく直接コントロールレバーに連結してコントロールレバーの回転力として作用すると、所定角度回転させてその間の回転力をロードセルによって検出することでコントロールレバーの操作力は計測可能であるが、回転アクチュエータの初期位置がディテントプレートのN位置(ニュートラルポジション)からずれている場合や、所定角度回転させた位置が変速機内のディテントプレートの係止位置に対して微小距離前後している場合には、操作レバーの各ポジション間における操作力の計測と同時に、各ポジション間の操作角度、すなわちシフト操作量を正確に計測することができない。
そこで、回転アクチュエータとの連結状態がフリーになる遊び角度を有して揺動アーム部材の回転中心軸周りにガイド部材を設け、その遊び角度内でディテントプレートの係止状態を完全に行わせる(ディテントプレートの谷の位置へのディテントピンの係合を行わせる)ことで、各変速ポジションの割り出し角度の正確な計測と、そのポジション間における操作力とを同時計測可能にした。
【0012】
具体的には、前記レバー係合部にコントロールレバーに作用する回転力を計測するロードセルを装着し、前記揺動アーム部材に揺動アーム部材とガイド部材との相対回転角度を計測するエンコーダを装着し、回転アクチュエータおよびエンコーダによってシフト操作量である各変速ポジションの割出角度を計測するとともに、前記ロードセルによってシフト操作力を計測する。
【0013】
かかる構成によって、前記レバー係合部にコントロールレバーに作用する回転力を計測するロードセルが装着されるので、ガイド部材からコントロールレバーに作用する操作力を計測できる。そして、同時に、前記揺動アーム部材に揺動アーム部材とガイド部材との相対回転角度を計測するエンコーダが設置されるので、遊び角度内における、揺動アーム部材とガイド部材との相対回転角度がエンコーダによって計測され、回転アクチュエータの作動角度に対して、該エンコーダによって計測された相対回転角度を補正することで、各変速ポジションの割り出し角度の正確な計測が可能となる。
【0014】
また、本発明において、好ましくは、前記揺動アーム部材と前記ガイド部材との遊び角度をゼロにして揺動アーム部材とガイド部材とをロック状態とするロックシリンダを備えるとよい。
かかる構成によると、ロックシリンダを作動させて遊び角度をなくすことで、揺動アーム部材とガイド部材とを一体化させることができる。そして、そのロック状態のときのエンコーダの読取値をエンコーダのゼロ基準点とすることでエンコーダの計測精度を高めることができる。
【0015】
また、本発明において、好ましくは、前記エンコーダの測定軸と前記ガイド部材とが歯車噛み合いによって結合され、エンコーダとガイド部材との回転比によってガイド部材とエンコーダとの相対回転角度が増幅されてエンコーダで計測可能に構成されるとよい。
【0016】
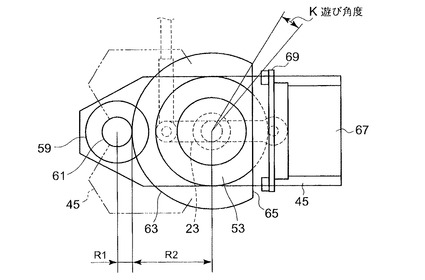
かかる構成によると、遊び角度内における、揺動アーム部材とガイド部材との相対回転角度を計測するエンコーダの測定軸が回転比によって増幅された角度を読み取ることができるため、揺動アーム部材に対するガイド部材の相対角度の検出精度が高められる。例えば、図2、3においてエンコーダ歯車とガイド部材歯車との回転比(半径比、R1:R2)を1:6とすることによって、エンコーダの分解能力0.5°に対してガイド部材の割り出し最小検出角度を約0.08°までの分解能力が得られるため検出精度を高めることができる。
【0017】
また、本発明において、好ましくは、前記揺動アーム部材に前記エンコーダおよび前記ロックシリンダが取り付けられて一体構造をなし、該一体構造の揺動アーム部材が前記回転アクチュエータによって回転されるとともに、該揺動アーム部材に前記ガイド部材が回転自在に支持されるとよい。
【0018】
かかる構成によって、前記エンコーダおよび前記ロックシリンダが取り付けられて一体構造の揺動アーム部材を回転アクチュエータによって回転し、さらに、揺動アーム部材に前記ガイド部材が回転自在に支持されることで検査ユニットが一体として構成されるため、コントロールレバーの操作力および操作角度の計測を同時行うことができる検査ユニットを簡単な構造で達成することができる。
【発明の効果】
【0019】
本発明の車両用変速機のシフト操作検査装置によれば、運転者が操作する変速操作レバーに連動して回転し自動変速機内の機械要素を動かし変速動作を行うコントロールレバーを有する自動変速機のシフト操作力とシフト操作量とを計測する車両用変速機のシフト操作検査装置において、搬送手段によって搬送されて所定位置に固定された前記自動変速機のコントロールレバーに対して、係合および離脱可能な検査ユニットと、該検査ユニットに連結し検査ユニットを回転せしめる回転アクチュエータと、該回転アクチュエータおよび検査ユニットを昇降自在に支持する検査基台とを備え、前記検査ユニットは、前記回転アクチュエータによって回転駆動される揺動アーム部材と、該揺動アーム部材の回転中心軸周りに一定の遊び角度を有して該揺動アーム部材と一体回転可能なガイド部材と、前記揺動アーム部材と前記ガイド部材が一体的に同軸回転をする際に回転アクチュエータの回転力を前記コントロールレバーに伝達するレバー係合部と、コントロールレバーに作用する回転力を計測するロードセルと、揺動アーム部材とガイド部材との相対回転角度を計測するエンコーダとを有して構成され、回転アクチュエータおよびエンコーダによってシフト操作量である各変速ポジションの割出角度を計測するとともに、前記ロードセルによってシフト操作力を計測可能に構成したので、車両用自動変速機の組立ラインにおいて、完成品の検査としてシフト動作の操作力およびシフト操作量である操作角度の良否判定を、同時に且つ自動で計測可能となり、自動変速機の組立ラインの組み立てサイクルタイムの短縮化を図ることが可能になる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1実施形態にかかる車両用変速機のシフト操作検査装置の全体構成側面図である。
【図2】図1の要部構成図である。
【図3】図2のA−A線断面図である。
【図4】図2のB−B線断面図である。
【図5】検査手順の説明図である。
【図6】検査手順を説明するフローチャートである。
【図7】検査手順を説明する図6の続きを示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明を図に示した実施形態を用いて詳細に説明する。但し、この実施形態に記載されている構成部品の寸法、材質、形状、その相対配置などは特に特定的な記載がない限り、この発明の範囲をそれのみに限定する趣旨ではない。
【0022】
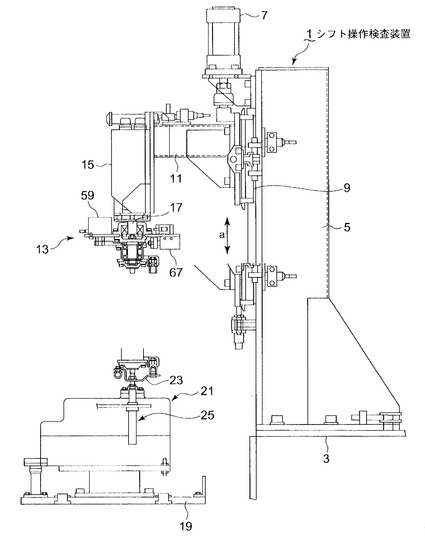
本発明にかかる車両用変速機のシフト操作検査装置の一実施形態を図1〜図4に基づいて説明する。図1は、車両用自動変速機の組立ラインの一部を構成する完成変速機の検査工程を構成するシフト操作検査装置1を示す。シフト操作検査装置1は、架台3上に支柱フレーム5が垂直に載置されると共に、該支柱フレーム5には、昇降用シリンダ7により矢印a方向にスライド可能な昇降ベース9が支持されている。昇降ベース9には水平に昇降台11が取り付けられて、該昇降台11の先端部には検査ユニット13を回転駆動する回転アクチュエータ15が回転出力軸17を下方にして取り付けられている。
【0023】
また、架台3の側面にコンベア台19が取り付けられ、コンベア台19上に組み立て完成された自動変速機21が載置固定され、図示しない搬送手段によって搬送可能に支持され、シフト操作検査装置1の前面の所定の検査位置で停止するようになっている。
【0024】
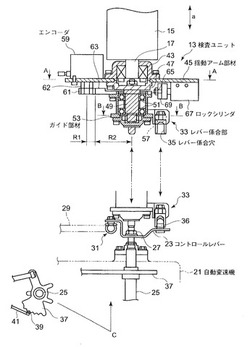
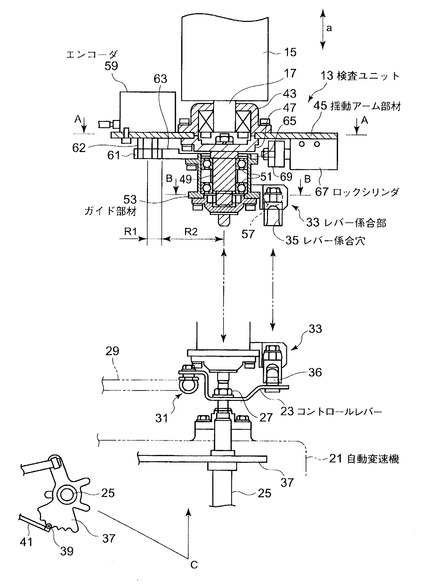
コンベア台19上には自動変速機21が、コントロールレバー23を上方に向けて位置した状態で載置されて固定されている。コントロールレバー23は、図2に示すように回動支軸25の端部に固定ナット27によって装着される。コントロールレバー23には自動変速機21が搭載される車両の運転室内に設けられたシフト操作レバーの回動に連動するようにプッシュプル式のコントロールケーブル29の一端が接続するケーブル接続部31が設けられている。コントロールレバー23のケーブル接続部31とは反対側の端部には、後述する検査ユニット13のレバー係合部33のレバー係合穴35に嵌合する係合ピン36が突設されている。該係合ピン36の先端部は係合を確実にするために先細のテーパ形状となっている。
【0025】
回動支軸25は自動変速機21の内部に延びており、回動支軸25を回転することによって自動変速機21内の機械要素を動かし変速動作を行う。また、自動変速機21内の機械要素を動かす変速動作に対応して回動支軸25の回転位置を固定するために、回動支軸25には図2に示すような山と谷とが縁部に形成されたディテントプレート37が取り付けられている。
【0026】
ディテントプレート37は、図2のC矢視方向の平面視図に示すように、D(ドライブポジション)、N(ニュートラルポジション)、R(リバースポジション)、P(パーキンクポジション)のように複数のポジションに対応して谷が存在し、その谷にディテントピン39が板ばね41による付勢力によって係合して、回動支軸25を変速ポジションに対応する位置に固定するようになっている。
【0027】
従って、自動変速機21の組立ラインにおいて、回動支軸25の端部に正確にコントロールレバー23が取り付けられていない場合や、板ばね41が組付けられていないため、ディテントプレート37が正確に変速ポジション位置で固定されない場合等の不具合を検査する必要がある。このために、変速ポジション間の操作力を測定することで、さらに変速ポジション間のコントロールレバーの割出し角を測定することでこれらの組み立て不具合の検出が可能となる。
【0028】
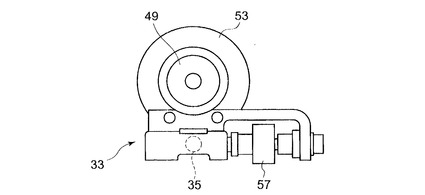
次に、検査ユニット13の構造について図2〜4を参照して説明する。図2のA−A線断面図を図3に示し、図2のB−B線断面図を図4に示す。
図2において回転アクチュエータ15の出力軸17に結合した門型の連結部材43に長方形状の平板材からなる揺動アーム部材45が回転アクチュエータ15と一体に回転するように取り付けられている。連結部材43の門型の開放下端部を連結するようにアダプタ部材47が接合され、該アダプタ部材47の中心部に取り付けられた回転中心軸49に上下に2つの軸受51が設けられ、該軸受51、51を介して回転中心軸49の外周に回転自在に円筒形状のガイド部材53が装着されている。また、ガイド部材53の外周にはレバー係合部33が設けられ、レバー係合部33にはコントロールレバー23に突設された係合ピン36が嵌合するレバー係合穴35が形成されるとともに、該係合穴35から係合ピン36に作用する回転力を計測するロードセル57(図4参照)が装着されている。
【0029】
また、図2、3に示すように、揺動アーム部材45には、一端部にエンコーダ59が装着されてその測定軸62にはエンコーダ歯車61が設けられ、エンコーダ歯車61に噛み合ってガイド部材歯車63が円筒形状のガイド部材53の外周に設けられている。このガイド部材歯車63は円環形状の一部が切り欠かれた切欠部65を有し、この切欠部65にロックシリンダ67のロックプレート69が当接するようになっている。
【0030】
また、揺動アーム部材45には、他端部に前記ロックシリンダ67が装着されて、ロックシリンダ67はロックプレート69が突出して切欠部65に当接する突出位置と、ロックプレート69が収納してガイド部材53の一定角度、すなわち遊び角度Kを形成する収納位置とに作動される。このアンロック状態の収納位置では、ガイド部材53は例えば約6°自由に回転可能状態に設定されている。
【0031】
次に、以上のように構成されたシフト操作検査装置1および検査ユニット13を用いた検査手順について、図6、7のフローチャートおよび図5の検査手順説明図を参照して説明する。
【0032】
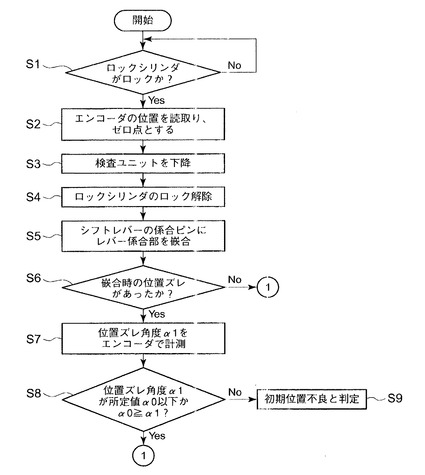
まず、検査を開始すると、ステップS1で、ロックシリンダ67がロック状態にあるか、すなわちロックプレート69が突出し、ガイド部材歯車63の切欠部65に当接状態にあるかを判断し、ロック状態の場合にはステップS2に進み、エンコーダ59の測定軸62の回転位置を読み取り、その位置をエンコーダ59のゼロ基準点Zとする。計測開始時においては回転アクチュエータ15はゼロ位置にある。
【0033】
次に、ステップS3で検査ユニット13を昇降用シリンダ7によって下降する。そして、ステップS4で、ロックシリンダ67の作動を解除してアンロック状態にしてロックプレート69を収納位置に引き込む。その後ガイド部材53は遊び角度K(約6°)の間内で、回転自由状態になり、ステップS5でその回転自由状態にあるガイド部材53を下降して、ガイド部材53のレバー係合部33のレバー係合穴35に、コントロールレバー23側の係合ピン36を嵌合させる。このとき、係合ピン36の先端部が係合を確実にするために先細のテーパ形状となっているので、嵌合が完了する際にガイド部材53がわずかに回転して位置ズレが修正されて確実な嵌合がなされる。
【0034】
ステップトS6では、この嵌合の際に初期位置ズレがあったかを判定して、位置ズレがあった場合には、ステップS7で、そのズレ角度をエンコーダ59によって計測し、位置ズレがない場合にはステップS10へ進む。
【0035】
エンコーダ59による計測は、エンコーダ59は揺動アーム部材45に装着されてその測定軸62にはエンコーダ歯車61が設けられ、エンコーダ歯車61に噛み合ってガイド部材歯車63が円筒形状のガイド部材53の外周側に設けられているので、自由回転状態のガイド部材53は、遊び角度K(約6°)の範囲内で微小回転して嵌合を完了するのでその嵌合の際の初期位置ズレ回転角度を、エンコーダ59によって計測することができる。
この初期位置ズレを修正するときは、回転アクチュエータ15は回動していないので回転アクチュエータ15はゼロ位置(初期位置)の状態を維持している。
【0036】
また、揺動アーム部材45とガイド部材53との相対回転角度を計測するエンコーダ59の測定軸62は回転比によって増幅された角度を読み取ることができるため、揺動アーム部材45に対するガイド部材53の相対角度の検出精度が高められる。すなわち、例えば、図2、図3においてエンコーダ歯車61とガイド部材歯車63との回転比(半径比、R1:R2)を1:6とすることによって、エンコーダの分解能力0.5°に対してガイド部材の割り出し最小検出角度を約0.08°までの分解能力が得られるため検出精度を高めることができるようになっている。
【0037】
次に、ステップS8で計測した初期位置ズレ角度α1が所定基準値α0以下かどうかを判定し、以下であれば次のステップS10に進み、以下でない場合には、ステップS9で初期位置が不良と判定する。すなわち、回動支軸25およびコントロールレバー23の取り付け位置にズレ等があることが検出される。
【0038】
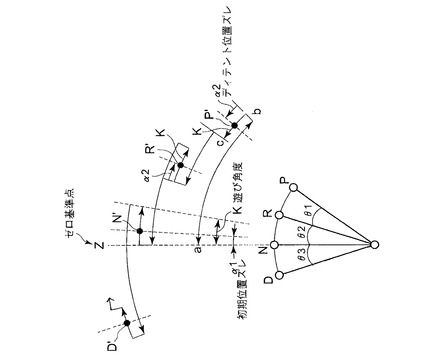
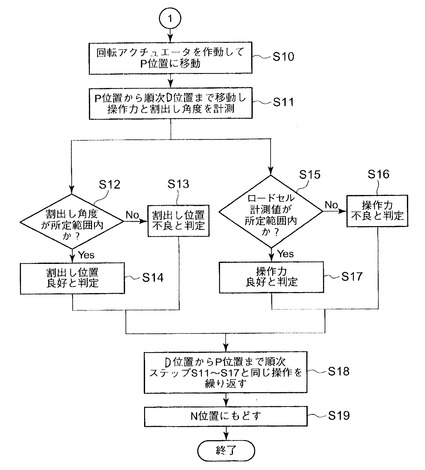
次に、ステップS10で、回転アクチュエータ15を作動させてNポジションからPポジションに移動する。図5においてθ1、θ2、θ3、θ4、θ5はコントロールレバー23の各ポジション間の割り出し角度の基準値を示し、この基準の割り出し角度プラス遊び角度(θ1+θ2+K)回転させる、その後、遊び角度K分戻す。その状態を図5中a→b→cで示す。
【0039】
遊び角度K分戻す間内に、ディテントピン39がディテントプレート37の谷の途中に位置する等によって不安定な状態にある場合に、板ばね41のばね力によってディテントプレート37の谷部へ確実に移動させて安定した係合が行われる。そして、その安定した係合へのディテント位置ズレ角度α2が、エンコーダ59によって計測される。このエンコーダ59による計測は、前記初期位置ズレ角度α1の計測と同様に、自由回転状態のガイド部材53の回転角度を計測することによって行われる。
【0040】
回転アクチュエータ15によるa→b→cの作動による回転角度に対する、エンコーダ59によって計測された初期位置ズレ角度α1と、ディテント位置ズレ角度α2とに基づいて(補正して)、Pポジションの割り出し角度P'が求められる。その後、ステップS11では、Pポジションから順次Dポジションまで各ポジションごとに、前記ステップS10と同様に、基準角度θ1、θ2、θ3、θ4、θ5プラス遊び角度Kを回転アクチュエータ15によって移動して、遊び角度K戻して、ディテント位置ズレ角度α2をエンコーダ59で計測して回転アクチュエータ15の回転角度を補正して、R'、N'、D'のそれぞれの割り出し位置の角度を求める。
また、割り出し角度を計測すると同時に、ロードセル57によってポジション間を移動するときの操作力を計測する。
【0041】
次にステップS12で、各ポジション間の割り出し角度が所定の範囲内か判定して、範囲内の場合には、ステップS14でコントロールレバー23の各ポジションの割り出し位置、すなわちシフト操作量が良好であると判定し、所定の範囲内にない場合には、ステップと13で各ポジションの割り出し位置、すなわちシフト操作量が不良であると判定する。
また、各ポジション間の操作力が所定の範囲内か判定して、範囲内の場合には、ステップS17でコントロールレバー23の各ポジション間の操作力が良好であると判定し、所定の範囲内にない場合には、ステップS16で各ポジション間の操作力が不良であると判定する。
【0042】
そして、ステップS18において、DポジションからPポジションへ前記ステップS11からS17までの操作と同様の操作を繰り返す。すなわちPポジションからDポジション、そしてDポジションからPポジションと往復を計測する。なお、往復の操作においてそれぞれ基準となる所定値を満たすことが必要とされる。ステップS19でNポジション戻って終了する。
【0043】
以上の一連の手順に沿って検査を行うことで、自動変速機21のコントロールレバー23に対して、昇降する検査ユニット13を着脱可能に係合して、回転アクチュエータ15によって回転力を、ガイド部材53のレバー係合部33を介して回転することで、自動的に、コントロールレバー23の操作力および操作量である操作角度を計測する検査装置を提供可能となる。
【0044】
すなわち、ガイド部材53のレバー係合部33の回転力を計測するロードセル57を装着し、揺動アーム部材45に揺動アーム部材45とガイド部材53との相対回転角度を計測するエンコーダ59とを設置して、回転アクチュエータ15、エンコーダ59、ロードセル57からの各信号に基づいてシフト操作力およびシフト操作量を同時に計測することができる。
【0045】
また、検査に際し、回転アクチュエータ15によって回転駆動される揺動アーム部材45に対して一定の遊び角度Kを有してガイド部材53が一体的に回転するように構成して、揺動アーム部材4とガイド部材53が一体的に同軸回転をして回転アクチュエータ15の回転力をコントロールレバー23に伝達するので、回転アクチュエータ15の回転力が直接コントロールレバー23の回転角度として作用せず、その遊び角度K内で変速機内部のディテントプレート37とディテントピン39との係止状態を確実化して、ディテントプレート37とディテントピン39との係合位置を基準として各ポジシション間の角度の計測が可能になる。その結果、変速機が備えているコントロールレバー23の各シフトポジションの割り出し位置を正確に検出できるようになる。
【0046】
また、本実施形態によれば、検査ユニット13を揺動アーム部材45に、図2に示すようにエンコーダ59、ロックシリンダ67、ガイド部材53、ロードセル57を取り付けて一体構造をなして構成するため、検査ユニット13を自動変速機21に対して着脱自在の機構が簡単に形成でき、シフト操作検査装置1全体をコンパクトにかつ簡単な機構で成立させることができる。その結果、本実施形態によれば、自動でかつ捜査力と操作量との両方を容易に検査できる。
【産業上の利用可能性】
【0047】
本発明によれば、完成品の検査としてシフト動作の操作力およびシフト操作量である操作角度の良否判定を、同時に且つ自動で計測可能であるため、車両用自動変速機の組立ラインの適用に適している。
【符号の説明】
【0048】
1 シフト操作検査装置
7 昇降シリンダ
13 検査ユニット
15 回転アクチュエータ
19 搬送手段(コンベア台)
21 自動変速機
23 コントロールレバー
33 レバー係合部
35 レバー係合穴
36 係合ピン
37 ディテントプレート
39 ディテントピン
45 揺動アーム部材
53 ガイド部材
57 ロードセル
59 エンコーダ
61 エンコーダ歯車
62 測定軸
63 ガイド部材歯車
67 ロックシリンダ
【技術分野】
【0001】
本発明は、トランスミッション(車両用変速機)の組立工程において完成品のトランスミッションのシフト操作力およびコントロールレバーの操作角度の良否判定を自動で行うシフト操作検査装置に関し、特に、車両用自動変速機のシフト操作検査装置に関する。
【背景技術】
【0002】
車両用変速機のシフト操作力、操作量を検出してシフトフィーリングを評価するものとして特許文献1(特開昭63−249036号公報)が知られている。また、車両用変速機のシフト操作力、操作量を検出してシフト操作力をアシスト制御するものとして特許文献2(特開2006−22863号公報)が知られている。
【0003】
特許文献1は、手動トランスミッションのコントロールレバーに作用する荷重およびレバーのストロークを基にコントロールレバーに加えられた力積や仕事量を求めることによってシフトフィーリングが評価される。
また、特許文献2は、車両用自動変速装置のレンジを切り換えるコントロールレバーの操作力をアシストするモータの駆動力を、コントロールレバーの移動位置を検出するポジション検出手段からの信号と、コントロールレバーの操作力を検出するトルクセンサからの信号とに基づいて制御する。
【0004】
一方、車両用変速機の組立工程においては、完成されたトランスミッションが所定のシフト動作の操作力やコントロールレバーの操作角度を満たしているかどうかを検査する検査工程が設けられ、完成品の検査を行っている。この検査工程においては検査に要する時間を短縮して組立ラインの生産性を向上させるために、自動化によって効率的に検査を行う検査装置および検査方法について種々の工夫がなされている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開昭63−249036号公報
【特許文献2】特開2006−22863号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前記特許文献1に示されるシフトフィーリング評価方法や、特許文献2に示される車両用自動変速装置のアシスト力制御方法は、シフト操作力、コントロールレバーの操作量を検出してこれら信号に基づいて制御や評価がなされるものであり、トランスミッションの組立工程における検査として用いる技術ではなく、特に、特許文献1におけるフィーリング評価手法は、トランスミッションの開発段階で用いる評価方法であり、トランスミッションの検査工程における検査装置としては適用されない。
【0007】
また、前記したように車両用変速機の組立工程においては、完成されたトランスミッションが所定のシフト動作の操作力や操作角度を満たしているかどうかを検査する検査工程が設けられて完成品の検査を行っているが、この検査工程においては検査に要する時間を短縮して組立ラインの生産性の向上の観点から、自動化によって効率的に検査を行う必要があり、シフト動作の操作力や操作角度を自動で短時間に計測可能な検査装置が望まれている。
【0008】
本発明は、かかる従来技術の課題に鑑み、車両用自動変速機の組立ラインにおいて、完成品の検査としてシフト動作の操作力およびシフト操作量である操作角度の良否判定を、同時に且つ自動で計測可能な車両用変速機のシフト操作検査装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
かかる目的を達成するため、本発明は、運転者が操作する変速操作レバーに連動して回転し自動変速機内の機械要素を動かし変速動作を行うコントロールレバーを有する自動変速機のシフト操作力とシフト操作量とを計測する車両用変速機のシフト操作検査装置において、搬送手段によって搬送されて所定位置に固定された前記自動変速機の装着されたコントロールレバーに対して、係合および離脱可能な検査ユニットと、該検査ユニットに連結し検査ユニットを回転せしめる回転アクチュエータと、該回転アクチュエータおよび検査ユニットを昇降自在に支持する検査基台とを備え、前記検査ユニットは、前記回転アクチュエータによって回転駆動される揺動アーム部材と、該揺動アーム部材の回転中心軸周りに一定の遊び角度を有して該揺動アーム部材と一体回転可能なガイド部材と、前記揺動アーム部材と前記ガイド部材が一体的に同軸回転をする際に回転アクチュエータの回転力を前記コントロールレバーに伝達するレバー係合部と、コントロールレバーに作用する回転力を計測するロードセルと、揺動アーム部材とガイド部材との相対回転角度を計測するエンコーダとを有して構成され、回転アクチュエータおよびエンコーダによってシフト操作量である各変速ポジションの割出角度を計測するとともに、前記ロードセルによってシフト操作力を計測することを特徴とする。
【0010】
本発明によれば、自動変速機の本体に装着されるコントロールレバーに対して、着脱可能に検査ユニットが係合するとともに、この検査ユニットは、前記回転アクチュエータによって回転駆動される揺動アーム部材と、該揺動アーム部材の回転中心軸周りに一定の遊び角度を有して該揺動アーム部材と一体回転可能なガイド部材と、前記揺動アーム部材と前記ガイド部材が一体的に同軸回転をする際に回転アクチュエータの回転力を前記コントロールレバーに伝達するレバー係合部とを有して構成されるので、回転アクチュエータの作動角度が直接コントロールレバーの回転角度として作用せず、変速機内部に設けられたディテントプレートと該ディテントプレートの谷にディテントスプリング力で係合するディテント係止部材の係合(図2参照)を前記の遊び角度内で可能として、ディテントプレートの係止位置を基準とした回転角度の計測が可能になる。その結果、シフト操作量であるコントロールレバーの各変速ポジションの割り出し位置を正確に検出できる。
【0011】
すなわち、回転アクチュエータの回転力が遊び角度なく直接コントロールレバーに連結してコントロールレバーの回転力として作用すると、所定角度回転させてその間の回転力をロードセルによって検出することでコントロールレバーの操作力は計測可能であるが、回転アクチュエータの初期位置がディテントプレートのN位置(ニュートラルポジション)からずれている場合や、所定角度回転させた位置が変速機内のディテントプレートの係止位置に対して微小距離前後している場合には、操作レバーの各ポジション間における操作力の計測と同時に、各ポジション間の操作角度、すなわちシフト操作量を正確に計測することができない。
そこで、回転アクチュエータとの連結状態がフリーになる遊び角度を有して揺動アーム部材の回転中心軸周りにガイド部材を設け、その遊び角度内でディテントプレートの係止状態を完全に行わせる(ディテントプレートの谷の位置へのディテントピンの係合を行わせる)ことで、各変速ポジションの割り出し角度の正確な計測と、そのポジション間における操作力とを同時計測可能にした。
【0012】
具体的には、前記レバー係合部にコントロールレバーに作用する回転力を計測するロードセルを装着し、前記揺動アーム部材に揺動アーム部材とガイド部材との相対回転角度を計測するエンコーダを装着し、回転アクチュエータおよびエンコーダによってシフト操作量である各変速ポジションの割出角度を計測するとともに、前記ロードセルによってシフト操作力を計測する。
【0013】
かかる構成によって、前記レバー係合部にコントロールレバーに作用する回転力を計測するロードセルが装着されるので、ガイド部材からコントロールレバーに作用する操作力を計測できる。そして、同時に、前記揺動アーム部材に揺動アーム部材とガイド部材との相対回転角度を計測するエンコーダが設置されるので、遊び角度内における、揺動アーム部材とガイド部材との相対回転角度がエンコーダによって計測され、回転アクチュエータの作動角度に対して、該エンコーダによって計測された相対回転角度を補正することで、各変速ポジションの割り出し角度の正確な計測が可能となる。
【0014】
また、本発明において、好ましくは、前記揺動アーム部材と前記ガイド部材との遊び角度をゼロにして揺動アーム部材とガイド部材とをロック状態とするロックシリンダを備えるとよい。
かかる構成によると、ロックシリンダを作動させて遊び角度をなくすことで、揺動アーム部材とガイド部材とを一体化させることができる。そして、そのロック状態のときのエンコーダの読取値をエンコーダのゼロ基準点とすることでエンコーダの計測精度を高めることができる。
【0015】
また、本発明において、好ましくは、前記エンコーダの測定軸と前記ガイド部材とが歯車噛み合いによって結合され、エンコーダとガイド部材との回転比によってガイド部材とエンコーダとの相対回転角度が増幅されてエンコーダで計測可能に構成されるとよい。
【0016】
かかる構成によると、遊び角度内における、揺動アーム部材とガイド部材との相対回転角度を計測するエンコーダの測定軸が回転比によって増幅された角度を読み取ることができるため、揺動アーム部材に対するガイド部材の相対角度の検出精度が高められる。例えば、図2、3においてエンコーダ歯車とガイド部材歯車との回転比(半径比、R1:R2)を1:6とすることによって、エンコーダの分解能力0.5°に対してガイド部材の割り出し最小検出角度を約0.08°までの分解能力が得られるため検出精度を高めることができる。
【0017】
また、本発明において、好ましくは、前記揺動アーム部材に前記エンコーダおよび前記ロックシリンダが取り付けられて一体構造をなし、該一体構造の揺動アーム部材が前記回転アクチュエータによって回転されるとともに、該揺動アーム部材に前記ガイド部材が回転自在に支持されるとよい。
【0018】
かかる構成によって、前記エンコーダおよび前記ロックシリンダが取り付けられて一体構造の揺動アーム部材を回転アクチュエータによって回転し、さらに、揺動アーム部材に前記ガイド部材が回転自在に支持されることで検査ユニットが一体として構成されるため、コントロールレバーの操作力および操作角度の計測を同時行うことができる検査ユニットを簡単な構造で達成することができる。
【発明の効果】
【0019】
本発明の車両用変速機のシフト操作検査装置によれば、運転者が操作する変速操作レバーに連動して回転し自動変速機内の機械要素を動かし変速動作を行うコントロールレバーを有する自動変速機のシフト操作力とシフト操作量とを計測する車両用変速機のシフト操作検査装置において、搬送手段によって搬送されて所定位置に固定された前記自動変速機のコントロールレバーに対して、係合および離脱可能な検査ユニットと、該検査ユニットに連結し検査ユニットを回転せしめる回転アクチュエータと、該回転アクチュエータおよび検査ユニットを昇降自在に支持する検査基台とを備え、前記検査ユニットは、前記回転アクチュエータによって回転駆動される揺動アーム部材と、該揺動アーム部材の回転中心軸周りに一定の遊び角度を有して該揺動アーム部材と一体回転可能なガイド部材と、前記揺動アーム部材と前記ガイド部材が一体的に同軸回転をする際に回転アクチュエータの回転力を前記コントロールレバーに伝達するレバー係合部と、コントロールレバーに作用する回転力を計測するロードセルと、揺動アーム部材とガイド部材との相対回転角度を計測するエンコーダとを有して構成され、回転アクチュエータおよびエンコーダによってシフト操作量である各変速ポジションの割出角度を計測するとともに、前記ロードセルによってシフト操作力を計測可能に構成したので、車両用自動変速機の組立ラインにおいて、完成品の検査としてシフト動作の操作力およびシフト操作量である操作角度の良否判定を、同時に且つ自動で計測可能となり、自動変速機の組立ラインの組み立てサイクルタイムの短縮化を図ることが可能になる。
【図面の簡単な説明】
【0020】
【図1】本発明の第1実施形態にかかる車両用変速機のシフト操作検査装置の全体構成側面図である。
【図2】図1の要部構成図である。
【図3】図2のA−A線断面図である。
【図4】図2のB−B線断面図である。
【図5】検査手順の説明図である。
【図6】検査手順を説明するフローチャートである。
【図7】検査手順を説明する図6の続きを示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明を図に示した実施形態を用いて詳細に説明する。但し、この実施形態に記載されている構成部品の寸法、材質、形状、その相対配置などは特に特定的な記載がない限り、この発明の範囲をそれのみに限定する趣旨ではない。
【0022】
本発明にかかる車両用変速機のシフト操作検査装置の一実施形態を図1〜図4に基づいて説明する。図1は、車両用自動変速機の組立ラインの一部を構成する完成変速機の検査工程を構成するシフト操作検査装置1を示す。シフト操作検査装置1は、架台3上に支柱フレーム5が垂直に載置されると共に、該支柱フレーム5には、昇降用シリンダ7により矢印a方向にスライド可能な昇降ベース9が支持されている。昇降ベース9には水平に昇降台11が取り付けられて、該昇降台11の先端部には検査ユニット13を回転駆動する回転アクチュエータ15が回転出力軸17を下方にして取り付けられている。
【0023】
また、架台3の側面にコンベア台19が取り付けられ、コンベア台19上に組み立て完成された自動変速機21が載置固定され、図示しない搬送手段によって搬送可能に支持され、シフト操作検査装置1の前面の所定の検査位置で停止するようになっている。
【0024】
コンベア台19上には自動変速機21が、コントロールレバー23を上方に向けて位置した状態で載置されて固定されている。コントロールレバー23は、図2に示すように回動支軸25の端部に固定ナット27によって装着される。コントロールレバー23には自動変速機21が搭載される車両の運転室内に設けられたシフト操作レバーの回動に連動するようにプッシュプル式のコントロールケーブル29の一端が接続するケーブル接続部31が設けられている。コントロールレバー23のケーブル接続部31とは反対側の端部には、後述する検査ユニット13のレバー係合部33のレバー係合穴35に嵌合する係合ピン36が突設されている。該係合ピン36の先端部は係合を確実にするために先細のテーパ形状となっている。
【0025】
回動支軸25は自動変速機21の内部に延びており、回動支軸25を回転することによって自動変速機21内の機械要素を動かし変速動作を行う。また、自動変速機21内の機械要素を動かす変速動作に対応して回動支軸25の回転位置を固定するために、回動支軸25には図2に示すような山と谷とが縁部に形成されたディテントプレート37が取り付けられている。
【0026】
ディテントプレート37は、図2のC矢視方向の平面視図に示すように、D(ドライブポジション)、N(ニュートラルポジション)、R(リバースポジション)、P(パーキンクポジション)のように複数のポジションに対応して谷が存在し、その谷にディテントピン39が板ばね41による付勢力によって係合して、回動支軸25を変速ポジションに対応する位置に固定するようになっている。
【0027】
従って、自動変速機21の組立ラインにおいて、回動支軸25の端部に正確にコントロールレバー23が取り付けられていない場合や、板ばね41が組付けられていないため、ディテントプレート37が正確に変速ポジション位置で固定されない場合等の不具合を検査する必要がある。このために、変速ポジション間の操作力を測定することで、さらに変速ポジション間のコントロールレバーの割出し角を測定することでこれらの組み立て不具合の検出が可能となる。
【0028】
次に、検査ユニット13の構造について図2〜4を参照して説明する。図2のA−A線断面図を図3に示し、図2のB−B線断面図を図4に示す。
図2において回転アクチュエータ15の出力軸17に結合した門型の連結部材43に長方形状の平板材からなる揺動アーム部材45が回転アクチュエータ15と一体に回転するように取り付けられている。連結部材43の門型の開放下端部を連結するようにアダプタ部材47が接合され、該アダプタ部材47の中心部に取り付けられた回転中心軸49に上下に2つの軸受51が設けられ、該軸受51、51を介して回転中心軸49の外周に回転自在に円筒形状のガイド部材53が装着されている。また、ガイド部材53の外周にはレバー係合部33が設けられ、レバー係合部33にはコントロールレバー23に突設された係合ピン36が嵌合するレバー係合穴35が形成されるとともに、該係合穴35から係合ピン36に作用する回転力を計測するロードセル57(図4参照)が装着されている。
【0029】
また、図2、3に示すように、揺動アーム部材45には、一端部にエンコーダ59が装着されてその測定軸62にはエンコーダ歯車61が設けられ、エンコーダ歯車61に噛み合ってガイド部材歯車63が円筒形状のガイド部材53の外周に設けられている。このガイド部材歯車63は円環形状の一部が切り欠かれた切欠部65を有し、この切欠部65にロックシリンダ67のロックプレート69が当接するようになっている。
【0030】
また、揺動アーム部材45には、他端部に前記ロックシリンダ67が装着されて、ロックシリンダ67はロックプレート69が突出して切欠部65に当接する突出位置と、ロックプレート69が収納してガイド部材53の一定角度、すなわち遊び角度Kを形成する収納位置とに作動される。このアンロック状態の収納位置では、ガイド部材53は例えば約6°自由に回転可能状態に設定されている。
【0031】
次に、以上のように構成されたシフト操作検査装置1および検査ユニット13を用いた検査手順について、図6、7のフローチャートおよび図5の検査手順説明図を参照して説明する。
【0032】
まず、検査を開始すると、ステップS1で、ロックシリンダ67がロック状態にあるか、すなわちロックプレート69が突出し、ガイド部材歯車63の切欠部65に当接状態にあるかを判断し、ロック状態の場合にはステップS2に進み、エンコーダ59の測定軸62の回転位置を読み取り、その位置をエンコーダ59のゼロ基準点Zとする。計測開始時においては回転アクチュエータ15はゼロ位置にある。
【0033】
次に、ステップS3で検査ユニット13を昇降用シリンダ7によって下降する。そして、ステップS4で、ロックシリンダ67の作動を解除してアンロック状態にしてロックプレート69を収納位置に引き込む。その後ガイド部材53は遊び角度K(約6°)の間内で、回転自由状態になり、ステップS5でその回転自由状態にあるガイド部材53を下降して、ガイド部材53のレバー係合部33のレバー係合穴35に、コントロールレバー23側の係合ピン36を嵌合させる。このとき、係合ピン36の先端部が係合を確実にするために先細のテーパ形状となっているので、嵌合が完了する際にガイド部材53がわずかに回転して位置ズレが修正されて確実な嵌合がなされる。
【0034】
ステップトS6では、この嵌合の際に初期位置ズレがあったかを判定して、位置ズレがあった場合には、ステップS7で、そのズレ角度をエンコーダ59によって計測し、位置ズレがない場合にはステップS10へ進む。
【0035】
エンコーダ59による計測は、エンコーダ59は揺動アーム部材45に装着されてその測定軸62にはエンコーダ歯車61が設けられ、エンコーダ歯車61に噛み合ってガイド部材歯車63が円筒形状のガイド部材53の外周側に設けられているので、自由回転状態のガイド部材53は、遊び角度K(約6°)の範囲内で微小回転して嵌合を完了するのでその嵌合の際の初期位置ズレ回転角度を、エンコーダ59によって計測することができる。
この初期位置ズレを修正するときは、回転アクチュエータ15は回動していないので回転アクチュエータ15はゼロ位置(初期位置)の状態を維持している。
【0036】
また、揺動アーム部材45とガイド部材53との相対回転角度を計測するエンコーダ59の測定軸62は回転比によって増幅された角度を読み取ることができるため、揺動アーム部材45に対するガイド部材53の相対角度の検出精度が高められる。すなわち、例えば、図2、図3においてエンコーダ歯車61とガイド部材歯車63との回転比(半径比、R1:R2)を1:6とすることによって、エンコーダの分解能力0.5°に対してガイド部材の割り出し最小検出角度を約0.08°までの分解能力が得られるため検出精度を高めることができるようになっている。
【0037】
次に、ステップS8で計測した初期位置ズレ角度α1が所定基準値α0以下かどうかを判定し、以下であれば次のステップS10に進み、以下でない場合には、ステップS9で初期位置が不良と判定する。すなわち、回動支軸25およびコントロールレバー23の取り付け位置にズレ等があることが検出される。
【0038】
次に、ステップS10で、回転アクチュエータ15を作動させてNポジションからPポジションに移動する。図5においてθ1、θ2、θ3、θ4、θ5はコントロールレバー23の各ポジション間の割り出し角度の基準値を示し、この基準の割り出し角度プラス遊び角度(θ1+θ2+K)回転させる、その後、遊び角度K分戻す。その状態を図5中a→b→cで示す。
【0039】
遊び角度K分戻す間内に、ディテントピン39がディテントプレート37の谷の途中に位置する等によって不安定な状態にある場合に、板ばね41のばね力によってディテントプレート37の谷部へ確実に移動させて安定した係合が行われる。そして、その安定した係合へのディテント位置ズレ角度α2が、エンコーダ59によって計測される。このエンコーダ59による計測は、前記初期位置ズレ角度α1の計測と同様に、自由回転状態のガイド部材53の回転角度を計測することによって行われる。
【0040】
回転アクチュエータ15によるa→b→cの作動による回転角度に対する、エンコーダ59によって計測された初期位置ズレ角度α1と、ディテント位置ズレ角度α2とに基づいて(補正して)、Pポジションの割り出し角度P'が求められる。その後、ステップS11では、Pポジションから順次Dポジションまで各ポジションごとに、前記ステップS10と同様に、基準角度θ1、θ2、θ3、θ4、θ5プラス遊び角度Kを回転アクチュエータ15によって移動して、遊び角度K戻して、ディテント位置ズレ角度α2をエンコーダ59で計測して回転アクチュエータ15の回転角度を補正して、R'、N'、D'のそれぞれの割り出し位置の角度を求める。
また、割り出し角度を計測すると同時に、ロードセル57によってポジション間を移動するときの操作力を計測する。
【0041】
次にステップS12で、各ポジション間の割り出し角度が所定の範囲内か判定して、範囲内の場合には、ステップS14でコントロールレバー23の各ポジションの割り出し位置、すなわちシフト操作量が良好であると判定し、所定の範囲内にない場合には、ステップと13で各ポジションの割り出し位置、すなわちシフト操作量が不良であると判定する。
また、各ポジション間の操作力が所定の範囲内か判定して、範囲内の場合には、ステップS17でコントロールレバー23の各ポジション間の操作力が良好であると判定し、所定の範囲内にない場合には、ステップS16で各ポジション間の操作力が不良であると判定する。
【0042】
そして、ステップS18において、DポジションからPポジションへ前記ステップS11からS17までの操作と同様の操作を繰り返す。すなわちPポジションからDポジション、そしてDポジションからPポジションと往復を計測する。なお、往復の操作においてそれぞれ基準となる所定値を満たすことが必要とされる。ステップS19でNポジション戻って終了する。
【0043】
以上の一連の手順に沿って検査を行うことで、自動変速機21のコントロールレバー23に対して、昇降する検査ユニット13を着脱可能に係合して、回転アクチュエータ15によって回転力を、ガイド部材53のレバー係合部33を介して回転することで、自動的に、コントロールレバー23の操作力および操作量である操作角度を計測する検査装置を提供可能となる。
【0044】
すなわち、ガイド部材53のレバー係合部33の回転力を計測するロードセル57を装着し、揺動アーム部材45に揺動アーム部材45とガイド部材53との相対回転角度を計測するエンコーダ59とを設置して、回転アクチュエータ15、エンコーダ59、ロードセル57からの各信号に基づいてシフト操作力およびシフト操作量を同時に計測することができる。
【0045】
また、検査に際し、回転アクチュエータ15によって回転駆動される揺動アーム部材45に対して一定の遊び角度Kを有してガイド部材53が一体的に回転するように構成して、揺動アーム部材4とガイド部材53が一体的に同軸回転をして回転アクチュエータ15の回転力をコントロールレバー23に伝達するので、回転アクチュエータ15の回転力が直接コントロールレバー23の回転角度として作用せず、その遊び角度K内で変速機内部のディテントプレート37とディテントピン39との係止状態を確実化して、ディテントプレート37とディテントピン39との係合位置を基準として各ポジシション間の角度の計測が可能になる。その結果、変速機が備えているコントロールレバー23の各シフトポジションの割り出し位置を正確に検出できるようになる。
【0046】
また、本実施形態によれば、検査ユニット13を揺動アーム部材45に、図2に示すようにエンコーダ59、ロックシリンダ67、ガイド部材53、ロードセル57を取り付けて一体構造をなして構成するため、検査ユニット13を自動変速機21に対して着脱自在の機構が簡単に形成でき、シフト操作検査装置1全体をコンパクトにかつ簡単な機構で成立させることができる。その結果、本実施形態によれば、自動でかつ捜査力と操作量との両方を容易に検査できる。
【産業上の利用可能性】
【0047】
本発明によれば、完成品の検査としてシフト動作の操作力およびシフト操作量である操作角度の良否判定を、同時に且つ自動で計測可能であるため、車両用自動変速機の組立ラインの適用に適している。
【符号の説明】
【0048】
1 シフト操作検査装置
7 昇降シリンダ
13 検査ユニット
15 回転アクチュエータ
19 搬送手段(コンベア台)
21 自動変速機
23 コントロールレバー
33 レバー係合部
35 レバー係合穴
36 係合ピン
37 ディテントプレート
39 ディテントピン
45 揺動アーム部材
53 ガイド部材
57 ロードセル
59 エンコーダ
61 エンコーダ歯車
62 測定軸
63 ガイド部材歯車
67 ロックシリンダ
【特許請求の範囲】
【請求項1】
運転者が操作する変速操作レバーに連動して回転し自動変速機内の機械要素を動かし変速動作を行うコントロールレバーを有する自動変速機のシフト操作力とシフト操作量とを計測する車両用変速機のシフト操作検査装置において、
搬送手段によって搬送されて所定位置に固定された前記自動変速機のコントロールレバーに対して、係合および離脱可能な検査ユニットと、該検査ユニットに連結し検査ユニットを回転せしめる回転アクチュエータと、該回転アクチュエータおよび検査ユニットを昇降自在に支持する検査基台とを備え、
前記検査ユニットは、前記回転アクチュエータによって回転駆動される揺動アーム部材と、該揺動アーム部材の回転中心軸周りに一定の遊び角度を有して該揺動アーム部材と一体回転可能なガイド部材と、前記揺動アーム部材と前記ガイド部材が一体的に同軸回転をする際に回転アクチュエータの回転力を前記コントロールレバーに伝達するレバー係合部と、コントロールレバーに作用する回転力を計測するロードセルと、揺動アーム部材とガイド部材との相対回転角度を計測するエンコーダとを有して構成され、回転アクチュエータおよびエンコーダによってシフト操作量である各変速ポジションの割出角度を計測するとともに、前記ロードセルによってシフト操作力を計測することを特徴とする車両用変速機のシフト操作検査装置。
【請求項2】
前記揺動アーム部材と前記ガイド部材との遊び角度をゼロにして揺動アーム部材とガイド部材とをロック状態とするロックシリンダを備えたことを特徴とする請求項1記載の車両用変速機のシフト操作検査装置。
【請求項3】
前記エンコーダの測定軸と前記ガイド部材とが歯車噛み合いによって結合され、エンコーダとガイド部材との回転比によってガイド部材とエンコーダとの相対回転角度が増幅されてエンコーダで計測可能に構成されることを特徴とする請求項1記載の車両用変速機のシフト操作検査装置。
【請求項4】
前記揺動アーム部材に前記エンコーダおよび前記ロックシリンダが取り付けられて一体構造をなし、該一体構造の揺動アーム部材が前記回転アクチュエータによって回転されるとともに、該揺動アーム部材に前記ガイド部材が回転自在に支持されたことを特徴とする請求項2記載の車両用変速機のシフト操作検査装置。
【請求項1】
運転者が操作する変速操作レバーに連動して回転し自動変速機内の機械要素を動かし変速動作を行うコントロールレバーを有する自動変速機のシフト操作力とシフト操作量とを計測する車両用変速機のシフト操作検査装置において、
搬送手段によって搬送されて所定位置に固定された前記自動変速機のコントロールレバーに対して、係合および離脱可能な検査ユニットと、該検査ユニットに連結し検査ユニットを回転せしめる回転アクチュエータと、該回転アクチュエータおよび検査ユニットを昇降自在に支持する検査基台とを備え、
前記検査ユニットは、前記回転アクチュエータによって回転駆動される揺動アーム部材と、該揺動アーム部材の回転中心軸周りに一定の遊び角度を有して該揺動アーム部材と一体回転可能なガイド部材と、前記揺動アーム部材と前記ガイド部材が一体的に同軸回転をする際に回転アクチュエータの回転力を前記コントロールレバーに伝達するレバー係合部と、コントロールレバーに作用する回転力を計測するロードセルと、揺動アーム部材とガイド部材との相対回転角度を計測するエンコーダとを有して構成され、回転アクチュエータおよびエンコーダによってシフト操作量である各変速ポジションの割出角度を計測するとともに、前記ロードセルによってシフト操作力を計測することを特徴とする車両用変速機のシフト操作検査装置。
【請求項2】
前記揺動アーム部材と前記ガイド部材との遊び角度をゼロにして揺動アーム部材とガイド部材とをロック状態とするロックシリンダを備えたことを特徴とする請求項1記載の車両用変速機のシフト操作検査装置。
【請求項3】
前記エンコーダの測定軸と前記ガイド部材とが歯車噛み合いによって結合され、エンコーダとガイド部材との回転比によってガイド部材とエンコーダとの相対回転角度が増幅されてエンコーダで計測可能に構成されることを特徴とする請求項1記載の車両用変速機のシフト操作検査装置。
【請求項4】
前記揺動アーム部材に前記エンコーダおよび前記ロックシリンダが取り付けられて一体構造をなし、該一体構造の揺動アーム部材が前記回転アクチュエータによって回転されるとともに、該揺動アーム部材に前記ガイド部材が回転自在に支持されたことを特徴とする請求項2記載の車両用変速機のシフト操作検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−243357(P2010−243357A)
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願番号】特願2009−93100(P2009−93100)
【出願日】平成21年4月7日(2009.4.7)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【出願人】(000176811)三菱自動車エンジニアリング株式会社 (402)
【Fターム(参考)】
【公開日】平成22年10月28日(2010.10.28)
【国際特許分類】
【出願日】平成21年4月7日(2009.4.7)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【出願人】(000176811)三菱自動車エンジニアリング株式会社 (402)
【Fターム(参考)】
[ Back to top ]