
車両用携帯機
【課題】車両側装置の送信アンテナまでの距離計算においてノイズ成分の影響を排除し、信頼性の高い距離データを得ること。
【解決手段】車両用携帯機において、車両側装置2の複数の送信アンテナANT1〜ANT3から送信された各送信信号を受信する受信部20と、受信した各送信信号の信号強度から各送信アンテナANT1〜ANT3までの距離を求める制御部22と、各送信アンテナANT1〜ANT3までの距離データを車両側装置2に対して無線送信する送信部21とを備える。車両側装置2との間で通信していない期間に、受信信号の信号強度を測定し該測定値をノイズ成分としてメモリ24に保存する。車両側装置2との通信時に各送信アンテナANT1〜ANT3から送信された各送信信号の信号強度をノイズ成分で補正して距離を求める。
【解決手段】車両用携帯機において、車両側装置2の複数の送信アンテナANT1〜ANT3から送信された各送信信号を受信する受信部20と、受信した各送信信号の信号強度から各送信アンテナANT1〜ANT3までの距離を求める制御部22と、各送信アンテナANT1〜ANT3までの距離データを車両側装置2に対して無線送信する送信部21とを備える。車両側装置2との間で通信していない期間に、受信信号の信号強度を測定し該測定値をノイズ成分としてメモリ24に保存する。車両側装置2との通信時に各送信アンテナANT1〜ANT3から送信された各送信信号の信号強度をノイズ成分で補正して距離を求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両側装置と携帯機の間で無線通信を行うことでドアの施錠・解錠等を行うキーレスエントリー装置に関し、特に車両側装置において携帯機が車内外のいずれに位置するかを精度よく判別することのできる車両用携帯機に関する。
【背景技術】
【0002】
従来、車両に設けられた車両側装置と使用者が携帯する携帯機との間で無線通信を行い、車両のドアを施錠・解錠するキーレスエントリー装置が知られている。また、携帯機が車両に近づくと、車両側装置と携帯機との間で自動的に通信が行われ、携帯機固有のIDを認証して、車両のドアの施錠・解錠動作を行うパッシブ・キーレスエントリー装置も知られている。
【0003】
上記パッシブ・キーレスエントリー装置では、携帯機が車両の外側にあるか内側にあるかを判別できることが要求される。このために、車両側装置には、車両の各所に複数の送信アンテナが設けられ、携帯機は各送信アンテナから受信した信号の強度をそれぞれ検出し、これら強度情報から携帯機の位置を算出して、携帯機が車内外のいずれに位置しているかを判別するようにしていた(例えば、特許文献1参照)。
【0004】
上記特許文献1記載のキーレスエントリー装置は、リクエスト信号を送信する複数の送信アンテナに信号線を介して接続される車両側送信部と、アンサー信号を受信する車両側受信部とを車両側装置に備える。また、リクエスト信号を受信する携帯機受信部と、アンサー信号を送信する携帯機送信部と、車両側装置の複数の送信アンテナから送信される信号の各強度を検出する携帯機制御部とを携帯機に備える。そして、車両側制御部または携帯機制御部は、携帯機制御部が検出した複数の送信アンテナからの強度データのうち2つのデータから算出される各距離の合計が所定の閾値より小さい場合には、携帯機が車内側に位置すると判定する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−266955号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1のキーレスエントリー装置は、携帯機が車内に配線された信号線の近傍に位置していて信号線から放射される信号がノイズとして携帯機に受信される場合には車内外の誤判定を防止できるが、携帯機が車外にある場合にはノイズによる誤判定を排除することができないという問題がある。
【0007】
本発明は、かかる点に鑑みてなされたものであり、車両側装置の送信アンテナまでの距離計算においてノイズ成分の影響を排除でき、信頼性の高い距離データを得ることができ、車両側装置における携帯機の車内外判定の誤判定を軽減できる車両用携帯機を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の車両用携帯機は、車両側装置の複数の送信アンテナから無線送信された各送信信号を受信する受信部と、前記受信部で受信した各送信信号の信号強度から前記各送信アンテナまでの距離を求める制御部と、前記制御部で求めた各送信アンテナまでの距離データを前記車両側装置に対して無線送信する送信部とを備え、前記制御部は、前記車両側装置との間で通信していない期間に、前記受信部で受信される信号の信号強度を測定し該測定値をノイズ成分として保存し、前記車両側装置との通信時に前記各送信アンテナから送信された各送信信号の信号強度を前記ノイズ成分で補正して前記各送信アンテナとの間の距離を求めることを特徴とする。
【0009】
この構成によれば、車両用携帯機が置かれた環境におけるノイズ成分のみを測定し、その後に測定される車両側装置の各送信アンテナからの送信信号の信号強度をノイズ成分で補正して前記各送信アンテナまでの距離を求めるので、車両側装置の送信アンテナまでの距離計算においてノイズ成分の影響を排除でき、信頼性の高い距離データを得ることができ、車両側装置における携帯機の車内外判定の誤判定を軽減できる。
【0010】
上記車両用携帯機において、前記各送信アンテナから送信された各送信信号の信号強度から前記ノイズ成分を減じることにより、各送信信号の信号強度に含まれるノイズ成分が除去されるように補正される。
【0011】
上記車両用携帯機において、前記制御部は、ノイズ成分まで含んだ送信信号の信号強度から計算される距離Lsnと、ノイズ成分のみから計算される距離Lnとを比較し、前記距離Lsnに対する前記距離Lnの比率が所定値よりも大きい場合、当該送信アンテナまでの距離として前記車両側装置での誤動作を抑制させる代替データを送信することを特徴とする。
【0012】
これにより、車両用携帯機に入力するノイズが大きいために信頼性の高い距離データを計算できない場合には、車両側装置での誤動作を抑制させる代替データを送信するので、ノイズ補正だけでは十分な精度が得られない場合であっても、信頼性の低い距離データによる車両側装置での誤動作を抑制することができる。
【0013】
また、車両側装置での誤動作を抑制させる代替データとして最大距離が望ましい。ノイズ補正だけでは十分な精度が得られない場合に、車両側装置において携帯機が車外であると判定する方向に導くことで、より安定した動作を実現できる。
【発明の効果】
【0014】
本発明によれば、車両側装置の送信アンテナまでの距離計算においてノイズ成分の影響を排除でき、信頼性の高い距離データを得ることのでき、車両側装置における携帯機の車内外判定の誤判定を軽減できる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施の形態に係るキーレスエントリー装置の機能ブロック図
【図2】上記一実施の形態におけるキーレスエントリー装置の概要図
【図3】ノイズ測定タイミング及びRSSI測定タイミングに関するタイミング図
【図4】携帯機におけるノイズ測定のためのフロー図
【図5】各送信アンテナまでの距離を計算するためのフロー図
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態について添付図面を参照して詳細に説明する。
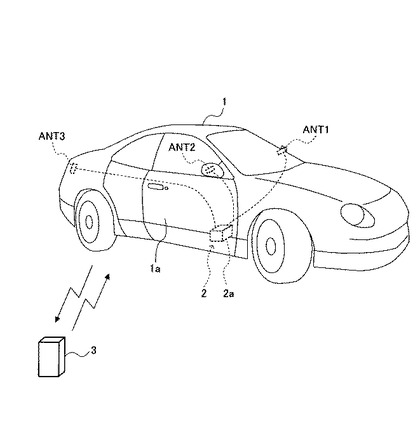
図1は本実施の形態に係るキーレスエントリー装置の機能ブロック図であり、図2は本実施の形態におけるキーレスエントリー装置の概要図を示している。本実施の形態におけるキーレスエントリー装置は、車両1側には車両側装置2が設けられ、使用者が携帯機3を携帯し、車両側装置2と携帯機3との間で無線通信を行って認証、施錠・解錠、その他の指令等をなすものである。車両側装置2は、車両1内に各種スイッチ入力処理とLAN通信、携帯機3の認証処理などを集中的に処理する電子制御ユニット2aを搭載する。また、車両1の各所に複数の送信アンテナANT1〜ANT3を有しており、各送信アンテナANT1〜ANT3から携帯機3に対して第1の周波数(低周波数)の送信信号が送信される。
【0017】
本実施形態では、車両側装置2と携帯機3との間で認証等の通信が行われ、認証がなされて、かつ携帯機3が車外にあると判別された場合に、車両側制御部12はドア1aを解錠する制御を行う。
【0018】
次に、車両側装置2及び携帯機3の構成について説明する。
車両側装置2は、携帯機3からの応答信号を受信する車両側受信部10と、携帯機3に対して送信信号(起動信号、各種コマンド、ID等を含む)を送信する車両側送信部11と、応答信号を解析して各種制御を行う車両側制御部12とを有している。また、車両側制御部12には、車固有のIDや1台の車両を操作可能な複数の携帯機のIDなど制御に必要な情報を記憶するメモリ13が備えられている。さらに、車両側受信部10には応答信号を受信するための受信アンテナ14が接続され、車両側送信部11には送信信号を送信するための複数の送信アンテナANT1〜ANT3が接続される。
【0019】
携帯機3は、車両側装置2からの送信信号を受信する携帯機受信部20と、車両側装置2に対して距離情報を含む応答信号を送信する携帯機送信部21と、後述する距離計算機能を有すると共に送信信号を受信した際に各種制御を行う携帯機制御部22と、自機に設定されているID及び車両側のID等を記憶する他に後述する測定ノイズデータを格納するメモリ24とを有している。また、携帯機受信部20と携帯機送信部21には、送信信号や応答信号の送受信を行う互いに直交する方向の指向特性を有する三軸アンテナ23が接続される。
【0020】
携帯機制御部22は、周期的に起動して車両1側の送信アンテナANT1〜ANT3が送信信号を出力していない状態で受信される信号の信号強度を測定してノイズ成分のみのRSSI(Received Signal Strength Indicator)値を取得する。また、携帯機制御部22は、携帯機受信部20で受信する車両側装置2からの送信信号に含まれる起動信号によって、消費電力が略ゼロの状態であるスリープ状態から通常状態に切り替わる。各送信アンテナANT1〜ANT3からの送信信号を順番に受信してRSSI測定し、各送信アンテナANT1〜ANT3までの距離を計算する。このとき、後述するように各送信信号のRSSI値からノイズ成分を除去する処理を加える。ノイズ補正して計算された距離情報が応答信号として送信される。なお、本実施の形態では、三軸アンテナ23によって受信した信号の強度を検出することができる。
【0021】
次に、本実施の形態のキーレスエントリー装置における各送信アンテナANT1〜ANT3までの距離計算のための動作について説明する。
【0022】
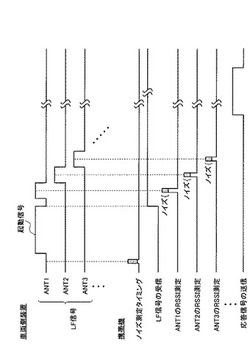
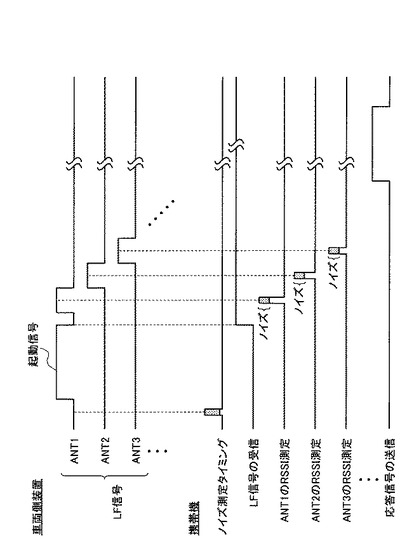
図3は携帯機3でのノイズ測定タイミング及び送信信号のRSSI測定タイミングについて示すタイミング図である。車両側装置2は所定周期でいずれかの送信アンテナ(本例では送信アンテナANT1)から起動信号を送信して携帯機3を起動する。起動信号の送信後、複数の送信アンテナANT1〜ANT3からタイミングをずらしてRSSI測定用の送信信号を送信する。
【0023】
ここで、各送信アンテナANT1〜ANT3から送信されるRSSI測定用の送信信号は、所定強度を有し所定時間に渡って継続するパルス状の信号であり、携帯機3側で受信強度を測定するために用いられる。RSSI測定用の送信信号は、携帯機3からの第2の周波数(高周波数)を有するアンサー信号であるRF信号を受信後に所定時間経過した後、車両側送信部11によって各送信アンテナANT1〜ANT3から所定の順序かつ所定の時間間隔で送信される。
【0024】
携帯機3では、車両側装置2との間で通信していない期間に、三軸アンテナ23によって受信信号強度を検出している。車両側装置2との間で通信していない期間は、車両側装置2から送信信号(起動信号及びその他の送信信号)を受信していない期間と言い換えることもできる。送信信号(起動信号及びその他の送信信号)を受信していない期間での受信信号強度から計算されるRSSI値は、RSSI測定用の送信信号に対するノイズ成分であると認識でき、当該ノイズ成分のみを検出してメモリ24へノイズデータとして格納する。ノイズデータをメモリ24へ格納した後、スリープ状態に移行する。
【0025】
上記した通り、携帯機3は、車両側装置2から起動信号を受信することによって起動するが、その後に受信する送信信号のRSSI値から距離計算して迅速に応答信号(距離情報)を返さなければならない。そのため、携帯機3は事前にノイズ測定を完了する。
【0026】
一方、携帯機3は、車両側装置2から起動信号を受信すると、スリープ状態から通常状態となり、各送信アンテナANT1〜ANT3から送信されるRSSI測定用の送信信号を順番に受信してRSSI測定を実施する。
【0027】
各送信アンテナANT1〜ANT3から送信されたRSSI測定用の送信信号の特定は、次の手順で行うことができる。携帯機3において起動信号に含まれるIDが、自機が保持するIDと一致するか否かを判定する。IDが一致すれば、携帯機制御部22は携帯機送信部21にアンサー信号RF1を送信させる。携帯機3は、車両側でRF1の信号受信からどのタイミングでどのアンテナからの信号が送信されるかの情報を記憶しており、また、RF1の信号を受信した時間からタイマーを起動させて受信時間を測定する。そして、両者を比較することでどの送信アンテナANT1〜ANT3からのRSSI測定用の送信信号であるかを識別することができる。なお、信号の強度測定は、車両1側からRSSI測定用の送信信号を送信して、携帯機3側でその強度を測定するものには限られず、車両1側から送信されるその他の信号の強度を測定するものであってもよい。
【0028】
図3に示すように、RSSI測定用の送信信号の受信強度から計算される各RSSI値には周辺環境に依存した量のノイズ成分が含まれている。本実施の形態では、先に測定したノイズ成分をメモリ24から読み出し、各RSSI値からノイズ分を除去する補正を加えて各送信アンテナANT1〜ANT3までの距離を計算する。計算された距離データを応答信号に含めて送信する。
【0029】
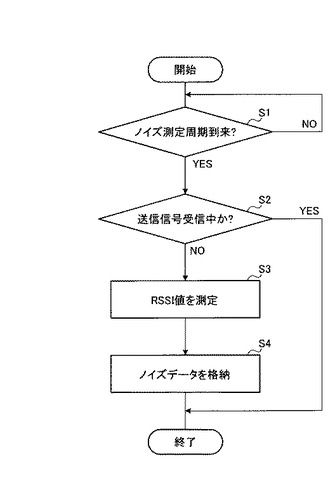
図4は携帯機3におけるノイズ測定のためのフロー図である。携帯機3は、ノイズ測定周期が予め設定されており、ノイズ測定周期が到来した時にスリープ状態であれば通常状態となる(ステップS1)。このとき、車両側装置2から送信信号(起動信号又はRSSI測定用の送信信号)を受信中であれば(ステップS2)、正しくノイズ成分を測定できないので、処理を終了する。一方、送信信号を受信中でないと判定した場合(ステップS2)、固定の送信アンテナANT1での受信強度からRSSI値を測定する(ステップS3)。このとき測定されるRSSI値は車両側から送信される信号成分が含まれていないので、ノイズ成分だけから計算されたRSSI値と見做して、当該RSSI値をノイズ成分としてメモリ24へ格納する(ステップS4)。以上のようにして、事前に現在の電波環境でのノイズデータが携帯機3のメモリ24に格納される。
【0030】
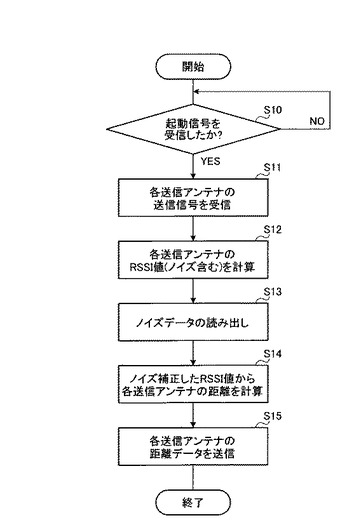
図5は、携帯機3においてRSSI測定用の送信信号のRSSI値から各送信アンテナANT1〜ANT3までの距離を計算するためのフロー図である。
【0031】
携帯機3は、起動信号を受信してスリープ状態から通常状態に移行する(ステップS10)。携帯機3は、通常状態へ移行すると、各送信アンテナANT1〜ANT3から送信されたRSSI測定用の送信信号を、携帯機受信部20によって受信する(ステップS11)。携帯機制御部22は、上述のように各RSSI測定用の送信信号の強度を三軸アンテナ23で測定し、その三軸アンテナ23から求めた送信アンテナ毎の強度データであるRSSI値を計算する(ステップS12)。
【0032】
RSSI測定用の送信信号のRSSI値を測定した後、上記ステップS4でメモリ24に格納したノイズデータを読み出し(ステップS13)、ノイズ成分が除去されたRSSI値に基づいて携帯機3と各送信アンテナANT1〜ANT3との間の距離をそれぞれ計算する(ステップS14)。携帯機制御部22は、以下の計算式(1)に基づいて送信アンテナまでの距離Lsを計算する。
Ls=K/[(kx・Xsn2+ky・Ysn2+kz・Zsn2)
−(kx・Xn2+ky・Yn2+kz・Zn2)]1/6 (1)式
【0033】
ここで、Lsはノイズ補正した距離計算値、K、kx、ky、kzは携帯機の補正値、Xsn、Ysn、Zsnは各軸X,Y,Z方向でのノイズ成分まで含んだ受信信号強度から計算されるRSSI値、Xn,Yn,Znは各軸X,Y,Z方向でのノイズ成分のみから計算されるRSSI値である。
【0034】
上式の如く、ノイズ成分まで含んだRSSI値(Xsn、Ysn、Zsn)からノイズ成分のみのRSSI値(Xn,Yn,Zn)を差し引くことで、ノイズ補正された正確な距離を計算できる。
【0035】
なお、本発明はノイズ成分のみのRSSI値(Xn,Yn,Zn)を用いてノイズ補正する工程を含むものであれば、上記(1)式に限定されない。
【0036】
例えば、以下の計算式(2)に基づいて送信アンテナまでの距離Lsを計算することもできる。
Ls=K/[(kx(Xsn−Xn)2+ky(Ysn−Yn)2
+kz(Zsn−Zn)2]1/6 (2)式
上記の計算方式(1)又は(2)基づいて、全ての送信アンテナANT1〜ANT3について距離Lsを計算したら(ステップS14)、距離Lsを含んだ応答信号を車両側装置2に送信する(ステップS15)。この際、応答信号には、個々の携帯機3に設定されているIDも含めて送信される。
【0037】
車両側装置2の車両側送信部11は、携帯機3からの応答信号を受信し、車両側制御部12が応答信号に含まれるIDについて、車両に登録されたものと一致するか否かを判別し、一致する場合には当該応答信号に含まれた各送信アンテナANT1〜ANT3からの距離Lsを解析して携帯機3の位置を判別する。
【0038】
また、携帯機3に入力するノイズが大きいために補正したとしても信頼性の高い距離データを計算できない場合、上記の計算方式(1)又は(2)で計算された距離Lsデータを送信せずに、車両側装置2での誤動作を抑制可能な代替データを送信するように構成することができる。
【0039】
上記の計算方式(1)又は(2)で送信アンテナまでの距離Lsを計算すると共に、以下の判定処理を組み合わせて、最終的に返信する距離データを確定する。
【0040】
すなわち、ノイズ成分まで含んだRSSI値から計算される距離Lsnと、ノイズ成分のみから計算される距離Lnとを、例えば以下の計算式(3)(4)にて別々に求める。
Lsn=K/[(kx・Xsn2+ky・Ysn2+kz・Zsn2)−kn]1/6
(3)式
Ln=K/[(kx・Xn2+ky・Yn2+kz・Zn2−kn)]1/6(4)式
ここで、knは任意の補正項である。
【0041】
上記式(3)(4)に基づいて計算されたLn、Lsnを用いて、Ln/Lsnを求めて本来の信号成分に対するノイズの影響度を評価する。たとえば、Ln/Lsn>所定値Qを判定する。仮に、所定値Q=0.5に設定すれば、RSSI測定用の送信信号に含まれるノイズ成分が本来の信号成分よりも大きいか否かを評価できることになる。Ln/Lsn>Qの場合、送信アンテナまでの距離を、上記の計算方式(1)又は(2)で計算された値ではなく、最大距離=Lmaxに置き換える。すなわち、携帯機3から車両側装置2へ通知可能な最も大きな距離データ(例えばLs=255)を代替データとして置き換える。
【0042】
RSSI測定用の送信信号に含まれるノイズ成分が本来の信号成分に比べて大きいために、ノイズ成分を除去したとしても所要の精度が得られない場合(Ln/Lsn>Q)、携帯機制御部22は、上記(1)式又は(2)式にて求めた距離データに代えて、送信アンテナからの距離を最大距離=Lmaxとして返信する。
【0043】
携帯機3から送信された応答信号に含まれる距離データとして最大距離(=Lmax)を受信した車両側装置2は、携帯機3が車両1の外であると判定することになる。
【0044】
このように、ノイズが大きいために携帯機3の位置判別の信頼性が低い場合、積極的に車両1外であると判定するように導くことで、車両1内であると誤判定して以後の処理を行う場合に比べて、より安定した動作を実現することができる。
【0045】
以上のように、本実施の形態に係る携帯機3よれば、車両1側の送信アンテナANT1〜ANT3が送信信号を出力していない状態で受信信号強度測定してノイズ成分のみのRSSI値を取得し、各送信アンテナANT1〜ANT3から送信された送信信号をノイズ成分まで含んだ状態で受信してRSSI値を計算し、ノイズ成分まで含んだRSSI値をノイズ成分のみのRSSI値を用いて補正するので、ノイズ成分を除去した信頼性の高い距離データを計算することができ、車両側装置2において携帯機3の車両1の内外判定精度を改善することができる。
【0046】
また、本実施の形態に係る携帯機3よれば、携帯機3に入力するノイズが大きいために信頼性の高い距離データを計算できない場合、上記の計算方式(1)又は(2)で計算された距離Lsデータを送信せずに、送信アンテナからの距離を最大距離=Lmaxとして返信するので、車両側装置2をより安定した動作に制御することができる。
【0047】
なお、本発明は上記実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々変形実施可能である。
【産業上の利用可能性】
【0048】
本発明は、キーレスエントリー装置用の携帯機に適用可能である。
【符号の説明】
【0049】
1 車両
1a ドア
2 車両側装置
2a 電子制御ユニット
3 携帯機
10 車両側受信部
11 車両側送信部
12 車両側制御部
13、24 メモリ
14 受信アンテナ
20 携帯機受信部
21 携帯機送信部
22 携帯機制御部
23 三軸アンテナ
ANT1〜ANT3 送信アンテナ
【技術分野】
【0001】
本発明は、車両側装置と携帯機の間で無線通信を行うことでドアの施錠・解錠等を行うキーレスエントリー装置に関し、特に車両側装置において携帯機が車内外のいずれに位置するかを精度よく判別することのできる車両用携帯機に関する。
【背景技術】
【0002】
従来、車両に設けられた車両側装置と使用者が携帯する携帯機との間で無線通信を行い、車両のドアを施錠・解錠するキーレスエントリー装置が知られている。また、携帯機が車両に近づくと、車両側装置と携帯機との間で自動的に通信が行われ、携帯機固有のIDを認証して、車両のドアの施錠・解錠動作を行うパッシブ・キーレスエントリー装置も知られている。
【0003】
上記パッシブ・キーレスエントリー装置では、携帯機が車両の外側にあるか内側にあるかを判別できることが要求される。このために、車両側装置には、車両の各所に複数の送信アンテナが設けられ、携帯機は各送信アンテナから受信した信号の強度をそれぞれ検出し、これら強度情報から携帯機の位置を算出して、携帯機が車内外のいずれに位置しているかを判別するようにしていた(例えば、特許文献1参照)。
【0004】
上記特許文献1記載のキーレスエントリー装置は、リクエスト信号を送信する複数の送信アンテナに信号線を介して接続される車両側送信部と、アンサー信号を受信する車両側受信部とを車両側装置に備える。また、リクエスト信号を受信する携帯機受信部と、アンサー信号を送信する携帯機送信部と、車両側装置の複数の送信アンテナから送信される信号の各強度を検出する携帯機制御部とを携帯機に備える。そして、車両側制御部または携帯機制御部は、携帯機制御部が検出した複数の送信アンテナからの強度データのうち2つのデータから算出される各距離の合計が所定の閾値より小さい場合には、携帯機が車内側に位置すると判定する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−266955号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1のキーレスエントリー装置は、携帯機が車内に配線された信号線の近傍に位置していて信号線から放射される信号がノイズとして携帯機に受信される場合には車内外の誤判定を防止できるが、携帯機が車外にある場合にはノイズによる誤判定を排除することができないという問題がある。
【0007】
本発明は、かかる点に鑑みてなされたものであり、車両側装置の送信アンテナまでの距離計算においてノイズ成分の影響を排除でき、信頼性の高い距離データを得ることができ、車両側装置における携帯機の車内外判定の誤判定を軽減できる車両用携帯機を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の車両用携帯機は、車両側装置の複数の送信アンテナから無線送信された各送信信号を受信する受信部と、前記受信部で受信した各送信信号の信号強度から前記各送信アンテナまでの距離を求める制御部と、前記制御部で求めた各送信アンテナまでの距離データを前記車両側装置に対して無線送信する送信部とを備え、前記制御部は、前記車両側装置との間で通信していない期間に、前記受信部で受信される信号の信号強度を測定し該測定値をノイズ成分として保存し、前記車両側装置との通信時に前記各送信アンテナから送信された各送信信号の信号強度を前記ノイズ成分で補正して前記各送信アンテナとの間の距離を求めることを特徴とする。
【0009】
この構成によれば、車両用携帯機が置かれた環境におけるノイズ成分のみを測定し、その後に測定される車両側装置の各送信アンテナからの送信信号の信号強度をノイズ成分で補正して前記各送信アンテナまでの距離を求めるので、車両側装置の送信アンテナまでの距離計算においてノイズ成分の影響を排除でき、信頼性の高い距離データを得ることができ、車両側装置における携帯機の車内外判定の誤判定を軽減できる。
【0010】
上記車両用携帯機において、前記各送信アンテナから送信された各送信信号の信号強度から前記ノイズ成分を減じることにより、各送信信号の信号強度に含まれるノイズ成分が除去されるように補正される。
【0011】
上記車両用携帯機において、前記制御部は、ノイズ成分まで含んだ送信信号の信号強度から計算される距離Lsnと、ノイズ成分のみから計算される距離Lnとを比較し、前記距離Lsnに対する前記距離Lnの比率が所定値よりも大きい場合、当該送信アンテナまでの距離として前記車両側装置での誤動作を抑制させる代替データを送信することを特徴とする。
【0012】
これにより、車両用携帯機に入力するノイズが大きいために信頼性の高い距離データを計算できない場合には、車両側装置での誤動作を抑制させる代替データを送信するので、ノイズ補正だけでは十分な精度が得られない場合であっても、信頼性の低い距離データによる車両側装置での誤動作を抑制することができる。
【0013】
また、車両側装置での誤動作を抑制させる代替データとして最大距離が望ましい。ノイズ補正だけでは十分な精度が得られない場合に、車両側装置において携帯機が車外であると判定する方向に導くことで、より安定した動作を実現できる。
【発明の効果】
【0014】
本発明によれば、車両側装置の送信アンテナまでの距離計算においてノイズ成分の影響を排除でき、信頼性の高い距離データを得ることのでき、車両側装置における携帯機の車内外判定の誤判定を軽減できる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施の形態に係るキーレスエントリー装置の機能ブロック図
【図2】上記一実施の形態におけるキーレスエントリー装置の概要図
【図3】ノイズ測定タイミング及びRSSI測定タイミングに関するタイミング図
【図4】携帯機におけるノイズ測定のためのフロー図
【図5】各送信アンテナまでの距離を計算するためのフロー図
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態について添付図面を参照して詳細に説明する。
図1は本実施の形態に係るキーレスエントリー装置の機能ブロック図であり、図2は本実施の形態におけるキーレスエントリー装置の概要図を示している。本実施の形態におけるキーレスエントリー装置は、車両1側には車両側装置2が設けられ、使用者が携帯機3を携帯し、車両側装置2と携帯機3との間で無線通信を行って認証、施錠・解錠、その他の指令等をなすものである。車両側装置2は、車両1内に各種スイッチ入力処理とLAN通信、携帯機3の認証処理などを集中的に処理する電子制御ユニット2aを搭載する。また、車両1の各所に複数の送信アンテナANT1〜ANT3を有しており、各送信アンテナANT1〜ANT3から携帯機3に対して第1の周波数(低周波数)の送信信号が送信される。
【0017】
本実施形態では、車両側装置2と携帯機3との間で認証等の通信が行われ、認証がなされて、かつ携帯機3が車外にあると判別された場合に、車両側制御部12はドア1aを解錠する制御を行う。
【0018】
次に、車両側装置2及び携帯機3の構成について説明する。
車両側装置2は、携帯機3からの応答信号を受信する車両側受信部10と、携帯機3に対して送信信号(起動信号、各種コマンド、ID等を含む)を送信する車両側送信部11と、応答信号を解析して各種制御を行う車両側制御部12とを有している。また、車両側制御部12には、車固有のIDや1台の車両を操作可能な複数の携帯機のIDなど制御に必要な情報を記憶するメモリ13が備えられている。さらに、車両側受信部10には応答信号を受信するための受信アンテナ14が接続され、車両側送信部11には送信信号を送信するための複数の送信アンテナANT1〜ANT3が接続される。
【0019】
携帯機3は、車両側装置2からの送信信号を受信する携帯機受信部20と、車両側装置2に対して距離情報を含む応答信号を送信する携帯機送信部21と、後述する距離計算機能を有すると共に送信信号を受信した際に各種制御を行う携帯機制御部22と、自機に設定されているID及び車両側のID等を記憶する他に後述する測定ノイズデータを格納するメモリ24とを有している。また、携帯機受信部20と携帯機送信部21には、送信信号や応答信号の送受信を行う互いに直交する方向の指向特性を有する三軸アンテナ23が接続される。
【0020】
携帯機制御部22は、周期的に起動して車両1側の送信アンテナANT1〜ANT3が送信信号を出力していない状態で受信される信号の信号強度を測定してノイズ成分のみのRSSI(Received Signal Strength Indicator)値を取得する。また、携帯機制御部22は、携帯機受信部20で受信する車両側装置2からの送信信号に含まれる起動信号によって、消費電力が略ゼロの状態であるスリープ状態から通常状態に切り替わる。各送信アンテナANT1〜ANT3からの送信信号を順番に受信してRSSI測定し、各送信アンテナANT1〜ANT3までの距離を計算する。このとき、後述するように各送信信号のRSSI値からノイズ成分を除去する処理を加える。ノイズ補正して計算された距離情報が応答信号として送信される。なお、本実施の形態では、三軸アンテナ23によって受信した信号の強度を検出することができる。
【0021】
次に、本実施の形態のキーレスエントリー装置における各送信アンテナANT1〜ANT3までの距離計算のための動作について説明する。
【0022】
図3は携帯機3でのノイズ測定タイミング及び送信信号のRSSI測定タイミングについて示すタイミング図である。車両側装置2は所定周期でいずれかの送信アンテナ(本例では送信アンテナANT1)から起動信号を送信して携帯機3を起動する。起動信号の送信後、複数の送信アンテナANT1〜ANT3からタイミングをずらしてRSSI測定用の送信信号を送信する。
【0023】
ここで、各送信アンテナANT1〜ANT3から送信されるRSSI測定用の送信信号は、所定強度を有し所定時間に渡って継続するパルス状の信号であり、携帯機3側で受信強度を測定するために用いられる。RSSI測定用の送信信号は、携帯機3からの第2の周波数(高周波数)を有するアンサー信号であるRF信号を受信後に所定時間経過した後、車両側送信部11によって各送信アンテナANT1〜ANT3から所定の順序かつ所定の時間間隔で送信される。
【0024】
携帯機3では、車両側装置2との間で通信していない期間に、三軸アンテナ23によって受信信号強度を検出している。車両側装置2との間で通信していない期間は、車両側装置2から送信信号(起動信号及びその他の送信信号)を受信していない期間と言い換えることもできる。送信信号(起動信号及びその他の送信信号)を受信していない期間での受信信号強度から計算されるRSSI値は、RSSI測定用の送信信号に対するノイズ成分であると認識でき、当該ノイズ成分のみを検出してメモリ24へノイズデータとして格納する。ノイズデータをメモリ24へ格納した後、スリープ状態に移行する。
【0025】
上記した通り、携帯機3は、車両側装置2から起動信号を受信することによって起動するが、その後に受信する送信信号のRSSI値から距離計算して迅速に応答信号(距離情報)を返さなければならない。そのため、携帯機3は事前にノイズ測定を完了する。
【0026】
一方、携帯機3は、車両側装置2から起動信号を受信すると、スリープ状態から通常状態となり、各送信アンテナANT1〜ANT3から送信されるRSSI測定用の送信信号を順番に受信してRSSI測定を実施する。
【0027】
各送信アンテナANT1〜ANT3から送信されたRSSI測定用の送信信号の特定は、次の手順で行うことができる。携帯機3において起動信号に含まれるIDが、自機が保持するIDと一致するか否かを判定する。IDが一致すれば、携帯機制御部22は携帯機送信部21にアンサー信号RF1を送信させる。携帯機3は、車両側でRF1の信号受信からどのタイミングでどのアンテナからの信号が送信されるかの情報を記憶しており、また、RF1の信号を受信した時間からタイマーを起動させて受信時間を測定する。そして、両者を比較することでどの送信アンテナANT1〜ANT3からのRSSI測定用の送信信号であるかを識別することができる。なお、信号の強度測定は、車両1側からRSSI測定用の送信信号を送信して、携帯機3側でその強度を測定するものには限られず、車両1側から送信されるその他の信号の強度を測定するものであってもよい。
【0028】
図3に示すように、RSSI測定用の送信信号の受信強度から計算される各RSSI値には周辺環境に依存した量のノイズ成分が含まれている。本実施の形態では、先に測定したノイズ成分をメモリ24から読み出し、各RSSI値からノイズ分を除去する補正を加えて各送信アンテナANT1〜ANT3までの距離を計算する。計算された距離データを応答信号に含めて送信する。
【0029】
図4は携帯機3におけるノイズ測定のためのフロー図である。携帯機3は、ノイズ測定周期が予め設定されており、ノイズ測定周期が到来した時にスリープ状態であれば通常状態となる(ステップS1)。このとき、車両側装置2から送信信号(起動信号又はRSSI測定用の送信信号)を受信中であれば(ステップS2)、正しくノイズ成分を測定できないので、処理を終了する。一方、送信信号を受信中でないと判定した場合(ステップS2)、固定の送信アンテナANT1での受信強度からRSSI値を測定する(ステップS3)。このとき測定されるRSSI値は車両側から送信される信号成分が含まれていないので、ノイズ成分だけから計算されたRSSI値と見做して、当該RSSI値をノイズ成分としてメモリ24へ格納する(ステップS4)。以上のようにして、事前に現在の電波環境でのノイズデータが携帯機3のメモリ24に格納される。
【0030】
図5は、携帯機3においてRSSI測定用の送信信号のRSSI値から各送信アンテナANT1〜ANT3までの距離を計算するためのフロー図である。
【0031】
携帯機3は、起動信号を受信してスリープ状態から通常状態に移行する(ステップS10)。携帯機3は、通常状態へ移行すると、各送信アンテナANT1〜ANT3から送信されたRSSI測定用の送信信号を、携帯機受信部20によって受信する(ステップS11)。携帯機制御部22は、上述のように各RSSI測定用の送信信号の強度を三軸アンテナ23で測定し、その三軸アンテナ23から求めた送信アンテナ毎の強度データであるRSSI値を計算する(ステップS12)。
【0032】
RSSI測定用の送信信号のRSSI値を測定した後、上記ステップS4でメモリ24に格納したノイズデータを読み出し(ステップS13)、ノイズ成分が除去されたRSSI値に基づいて携帯機3と各送信アンテナANT1〜ANT3との間の距離をそれぞれ計算する(ステップS14)。携帯機制御部22は、以下の計算式(1)に基づいて送信アンテナまでの距離Lsを計算する。
Ls=K/[(kx・Xsn2+ky・Ysn2+kz・Zsn2)
−(kx・Xn2+ky・Yn2+kz・Zn2)]1/6 (1)式
【0033】
ここで、Lsはノイズ補正した距離計算値、K、kx、ky、kzは携帯機の補正値、Xsn、Ysn、Zsnは各軸X,Y,Z方向でのノイズ成分まで含んだ受信信号強度から計算されるRSSI値、Xn,Yn,Znは各軸X,Y,Z方向でのノイズ成分のみから計算されるRSSI値である。
【0034】
上式の如く、ノイズ成分まで含んだRSSI値(Xsn、Ysn、Zsn)からノイズ成分のみのRSSI値(Xn,Yn,Zn)を差し引くことで、ノイズ補正された正確な距離を計算できる。
【0035】
なお、本発明はノイズ成分のみのRSSI値(Xn,Yn,Zn)を用いてノイズ補正する工程を含むものであれば、上記(1)式に限定されない。
【0036】
例えば、以下の計算式(2)に基づいて送信アンテナまでの距離Lsを計算することもできる。
Ls=K/[(kx(Xsn−Xn)2+ky(Ysn−Yn)2
+kz(Zsn−Zn)2]1/6 (2)式
上記の計算方式(1)又は(2)基づいて、全ての送信アンテナANT1〜ANT3について距離Lsを計算したら(ステップS14)、距離Lsを含んだ応答信号を車両側装置2に送信する(ステップS15)。この際、応答信号には、個々の携帯機3に設定されているIDも含めて送信される。
【0037】
車両側装置2の車両側送信部11は、携帯機3からの応答信号を受信し、車両側制御部12が応答信号に含まれるIDについて、車両に登録されたものと一致するか否かを判別し、一致する場合には当該応答信号に含まれた各送信アンテナANT1〜ANT3からの距離Lsを解析して携帯機3の位置を判別する。
【0038】
また、携帯機3に入力するノイズが大きいために補正したとしても信頼性の高い距離データを計算できない場合、上記の計算方式(1)又は(2)で計算された距離Lsデータを送信せずに、車両側装置2での誤動作を抑制可能な代替データを送信するように構成することができる。
【0039】
上記の計算方式(1)又は(2)で送信アンテナまでの距離Lsを計算すると共に、以下の判定処理を組み合わせて、最終的に返信する距離データを確定する。
【0040】
すなわち、ノイズ成分まで含んだRSSI値から計算される距離Lsnと、ノイズ成分のみから計算される距離Lnとを、例えば以下の計算式(3)(4)にて別々に求める。
Lsn=K/[(kx・Xsn2+ky・Ysn2+kz・Zsn2)−kn]1/6
(3)式
Ln=K/[(kx・Xn2+ky・Yn2+kz・Zn2−kn)]1/6(4)式
ここで、knは任意の補正項である。
【0041】
上記式(3)(4)に基づいて計算されたLn、Lsnを用いて、Ln/Lsnを求めて本来の信号成分に対するノイズの影響度を評価する。たとえば、Ln/Lsn>所定値Qを判定する。仮に、所定値Q=0.5に設定すれば、RSSI測定用の送信信号に含まれるノイズ成分が本来の信号成分よりも大きいか否かを評価できることになる。Ln/Lsn>Qの場合、送信アンテナまでの距離を、上記の計算方式(1)又は(2)で計算された値ではなく、最大距離=Lmaxに置き換える。すなわち、携帯機3から車両側装置2へ通知可能な最も大きな距離データ(例えばLs=255)を代替データとして置き換える。
【0042】
RSSI測定用の送信信号に含まれるノイズ成分が本来の信号成分に比べて大きいために、ノイズ成分を除去したとしても所要の精度が得られない場合(Ln/Lsn>Q)、携帯機制御部22は、上記(1)式又は(2)式にて求めた距離データに代えて、送信アンテナからの距離を最大距離=Lmaxとして返信する。
【0043】
携帯機3から送信された応答信号に含まれる距離データとして最大距離(=Lmax)を受信した車両側装置2は、携帯機3が車両1の外であると判定することになる。
【0044】
このように、ノイズが大きいために携帯機3の位置判別の信頼性が低い場合、積極的に車両1外であると判定するように導くことで、車両1内であると誤判定して以後の処理を行う場合に比べて、より安定した動作を実現することができる。
【0045】
以上のように、本実施の形態に係る携帯機3よれば、車両1側の送信アンテナANT1〜ANT3が送信信号を出力していない状態で受信信号強度測定してノイズ成分のみのRSSI値を取得し、各送信アンテナANT1〜ANT3から送信された送信信号をノイズ成分まで含んだ状態で受信してRSSI値を計算し、ノイズ成分まで含んだRSSI値をノイズ成分のみのRSSI値を用いて補正するので、ノイズ成分を除去した信頼性の高い距離データを計算することができ、車両側装置2において携帯機3の車両1の内外判定精度を改善することができる。
【0046】
また、本実施の形態に係る携帯機3よれば、携帯機3に入力するノイズが大きいために信頼性の高い距離データを計算できない場合、上記の計算方式(1)又は(2)で計算された距離Lsデータを送信せずに、送信アンテナからの距離を最大距離=Lmaxとして返信するので、車両側装置2をより安定した動作に制御することができる。
【0047】
なお、本発明は上記実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々変形実施可能である。
【産業上の利用可能性】
【0048】
本発明は、キーレスエントリー装置用の携帯機に適用可能である。
【符号の説明】
【0049】
1 車両
1a ドア
2 車両側装置
2a 電子制御ユニット
3 携帯機
10 車両側受信部
11 車両側送信部
12 車両側制御部
13、24 メモリ
14 受信アンテナ
20 携帯機受信部
21 携帯機送信部
22 携帯機制御部
23 三軸アンテナ
ANT1〜ANT3 送信アンテナ
【特許請求の範囲】
【請求項1】
車両側装置の複数の送信アンテナから無線送信された各送信信号を受信する受信部と、前記受信部で受信した各送信信号の信号強度から前記各送信アンテナまでの距離を求める制御部と、前記制御部で求めた各送信アンテナまでの距離データを前記車両側装置に対して無線送信する送信部とを備え、
前記制御部は、前記車両側装置との間で通信していない期間に、前記受信部で受信される信号の信号強度を測定し該測定値をノイズ成分として保存し、前記車両側装置との通信時に前記各送信アンテナから送信された各送信信号の信号強度を前記ノイズ成分で補正して前記各送信アンテナとの間の距離を求める、
ことを特徴とする車両用携帯機。
【請求項2】
前記制御部は、前記各送信アンテナから送信された各送信信号の信号強度から前記ノイズ成分を減じることを特徴とする請求項1記載の車両用携帯機。
【請求項3】
前記制御部は、ノイズ成分まで含んだ送信信号の信号強度から計算される距離Lsnと、ノイズ成分のみから計算される距離Lnとを比較し、前記距離Lsnに対する前記距離Lnの比率が所定値よりも大きい場合、当該送信アンテナまでの距離として前記車両側装置での誤動作を抑制させる代替データを送信することを特徴とする請求項1又は請求項2記載の車両用携帯機。
【請求項4】
前記制御部は、前記車両側装置での誤動作を抑制させる代替データとして最大距離を送信することを特徴とする請求項3記載の車両用携帯機。
【請求項1】
車両側装置の複数の送信アンテナから無線送信された各送信信号を受信する受信部と、前記受信部で受信した各送信信号の信号強度から前記各送信アンテナまでの距離を求める制御部と、前記制御部で求めた各送信アンテナまでの距離データを前記車両側装置に対して無線送信する送信部とを備え、
前記制御部は、前記車両側装置との間で通信していない期間に、前記受信部で受信される信号の信号強度を測定し該測定値をノイズ成分として保存し、前記車両側装置との通信時に前記各送信アンテナから送信された各送信信号の信号強度を前記ノイズ成分で補正して前記各送信アンテナとの間の距離を求める、
ことを特徴とする車両用携帯機。
【請求項2】
前記制御部は、前記各送信アンテナから送信された各送信信号の信号強度から前記ノイズ成分を減じることを特徴とする請求項1記載の車両用携帯機。
【請求項3】
前記制御部は、ノイズ成分まで含んだ送信信号の信号強度から計算される距離Lsnと、ノイズ成分のみから計算される距離Lnとを比較し、前記距離Lsnに対する前記距離Lnの比率が所定値よりも大きい場合、当該送信アンテナまでの距離として前記車両側装置での誤動作を抑制させる代替データを送信することを特徴とする請求項1又は請求項2記載の車両用携帯機。
【請求項4】
前記制御部は、前記車両側装置での誤動作を抑制させる代替データとして最大距離を送信することを特徴とする請求項3記載の車両用携帯機。
【図1】



【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−181295(P2010−181295A)
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願番号】特願2009−25459(P2009−25459)
【出願日】平成21年2月6日(2009.2.6)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願日】平成21年2月6日(2009.2.6)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]