
車載システム
【課題】GPSアンテナの設置位置や光ビーコンアンテナの設置位置によらずに、光ビーコン信号より算定した現在位置を用いて、GPSによる衛星測位によって算定した現在位置を正しく補正する「車載システム」を提供する。
【解決手段】光ビーコンアンテナ17の自車上の設置位置と、GPSアンテナ14の自車上の設置位置202の指定を、予めユーザから受け付ける。路側機400から光ビーコンで自車位置情報を受信したならば、光ビーコンアンテナ17の設置位置の位置座標を算出し、光ビーコンアンテナ17の設置位置の位置座標と、ユーザから設置された光ビーコンアンテナ17とGPSアンテナ14の自車の設置位置の相対位置関係より、GPSアンテナ14の設置位置の位置座標を求め、GPS受信機15の衛星測位位置を、求めたGPSアンテナ14の位置座標に一致させる補正情報を設定する。
【解決手段】光ビーコンアンテナ17の自車上の設置位置と、GPSアンテナ14の自車上の設置位置202の指定を、予めユーザから受け付ける。路側機400から光ビーコンで自車位置情報を受信したならば、光ビーコンアンテナ17の設置位置の位置座標を算出し、光ビーコンアンテナ17の設置位置の位置座標と、ユーザから設置された光ビーコンアンテナ17とGPSアンテナ14の自車の設置位置の相対位置関係より、GPSアンテナ14の設置位置の位置座標を求め、GPS受信機15の衛星測位位置を、求めたGPSアンテナ14の位置座標に一致させる補正情報を設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車に搭載された車載システムにおいて現在位置を算出する技術に関するものである。
【背景技術】
【0002】
自動車に搭載された車載システムにおいて現在位置を算出する技術としては、GPSによる衛星測位によって現在位置を算出する技術が広く用いられている。
また、外部に固定設置された光ビーコン送信機から受信した光ビーコン信号より現在位置を算定したり、光ビーコン信号より算定した現在位置を用いて、GPSによる衛星測位によって算定した現在位置を補正する技術も知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008-89353号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
さて、上述のように、自動車に搭載された車載システムにおいて、GPSによる衛星測位によって現在位置を算出する場合、算出される現在位置は、GPS受信機のGPSアンテナの設置位置となる。
一方、外部に固定設置された光ビーコン送信機から受信した光ビーコン信号より算定される現在位置は、必ずしもGPSアンテナの設置位置とはならず、光ビーコン受信機の光ビーコンアンテナの設置位置や、自動車上の所定の基準位置となる。
そして、このために、GPSアンテナの設置位置や光ビーコンアンテナの設置位置によっては、光ビーコン信号より算定した現在位置を用いて、GPSによる衛星測位によって算定した現在位置を正しく補正できなくなる場合がある。
そこで、本発明は、GPSアンテナの設置位置や光ビーコンアンテナの設置位置によらずに、光ビーコン信号より算定した現在位置を用いて、GPSによる衛星測位によって算定した現在位置を正しく補正することを課題とする。
【課題を解決するための手段】
【0005】
前記課題達成のために、本発明は、自動車に搭載される車載システムに、衛星測位を行うGPS受信機と、路側機から送信される光ビーコン信号を受信する光ビーコン受信機と、前記GPS受信機のGPSアンテナの前記自動車上の設置位置と、前記光ビーコン装置の光ビーコンアンテナの前記自動車上の設置位置を記憶した設置位置記憶手段と、前記GPS受信機が衛星測位した位置座標と、前記設置位置記憶手段に記憶されている、前記GPS受信機のGPSアンテナの前記自動車上の設置位置とに基づいて、前記自動車上の基準位置の位置座標を求めて現在位置とする現在位置算出手段と、前記光ビーコン装置で受信した光ビーコン信号に基づいて求まる前記ビーコンアンテナの位置座標と、前記設置位置記憶手段に記憶されている、前記光ビーコンアンテナの前記自動車上の設置位置とより求まる前記自動車上の基準位置の位置座標に、前記現在位置算出手段が算出している現在位置を補正するGPS位置補正手段とを備えたものである。
【0006】
また、本発明は、前記課題達成のために、自動車に搭載される車載システムに、衛星測位を行うGPS受信機と、路側機から送信される光ビーコン信号を受信する光ビーコン受信機と、前記GPS受信機のGPSアンテナの前記自動車上の設置位置と、前記光ビーコン装置の光ビーコンアンテナの前記自動車上の設置位置を記憶した設置位置記憶手段と、前記光ビーコン装置で受信した光ビーコン信号に基づいて求まる前記ビーコンアンテナの位置座標と、前記設置位置記憶手段に記憶されている、前記GPSアンテナの前記自動車上の設置位置と前記光ビーコンアンテナの前記自動車上の設置位置との相対位置関係とより、前記GPSアンテナの位置座標を算出し、算出した前記GPSアンテナの位置座標と、前記GPS受信機が衛星測位している位置座標との誤差に基づく、衛星測位位置の補正を前記GPS受信機に行わせるGPS位置補正手段とを備えたものである。
【0007】
ここで、これらの車載システムには、さらに前記自動車の形状を表した画面上で、前記GPSアンテナの前記自動車上の設置位置と、前記光ビーコンアンテナの前記自動車上の設置位置の指定を受け付けて、前記設置位置記憶手段に格納する設置位置受付手段を設けるようにしてもよい。
【0008】
これらの車載システムによれば、GPSアンテナの自車上の設置位置と光ビーコンアンテナの自車上の設置位置との相対的な位置関係を考慮して、光ビーコン信号を利用した、GPS受信機の衛星測位位置に基づく現在位置の補正や、GPS受信機における衛星測位の補正を行うので、GPSアンテナの設置位置や光ビーコンアンテナの設置位置によらずに、光ビーコン信号を利用して、GPSによる衛星測位を用いて算定する現在位置を正しく補正することができる。
【発明の効果】
【0009】
以上のように、本発明によれば、GPSアンテナや光ビーコンアンテナの設置位置によらずに、光ビーコン信号より算定した現在位置用いて、GPSによる衛星測位を用いて算定する現在位置を正しく補正することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態に係る車載システムの構成を示す図である。
【図2】本発明の実施形態に係る車載システムの表示例を示す図である。
【図3】本発明の実施形態に係るGPS位置補正処理を示すフローチャートである。
【図4】本発明の実施形態に係る光ビーコンアンテナの座標算出例を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態について説明する。
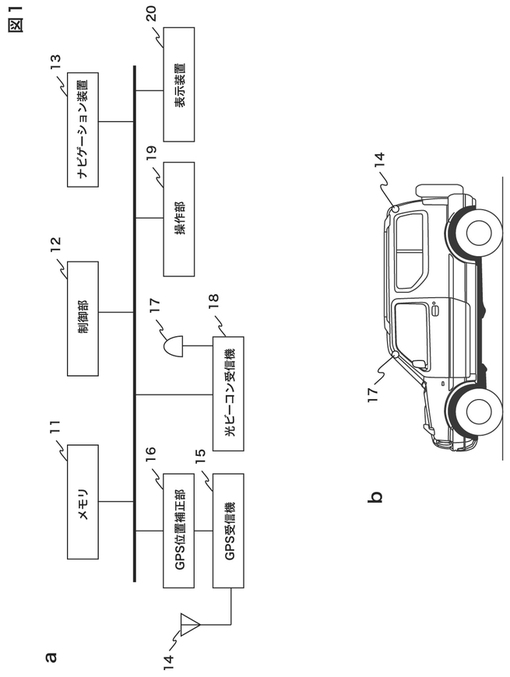
図1aに、本実施形態に係る車載システムの構成を示す。
車載システムは、自動車に搭載されるシステムであり、図示するように、メモリ11、制御部12、ナビゲーション装置13、GPSアンテナ14を備えたGPS受信機15、GPS位置補正部16、光ビーコンアンテナ17を備えた光ビーコン受信機18、操作部19、表示装置20とを備えている。
【0012】
但し、車載システムは、ハードウエア的には、マイクロプロセッサや、メモリや、その他の周辺デバイスを有する一般的な構成を備えたコンピュータを利用して構成されるものであってよく、この場合、以上に示した車載システムの各部もしくはその一部は、マイクロプロセッサが予め用意されたプログラムを実行することにより具現化するプロセスとして実現されるものであって良い。また、この場合、このようなプログラムは、記録媒体や適当な通信路を介して、車載システムに提供されるものであって良い。
【0013】
さて、ここで、光ビーコンアンテナ17と、GPSアンテナ14は、たとえば、図1bに示すように、光ビーコンアンテナ17は車室前方上部に設置され、GPSアンテナ14は車両後部に設置されるなど、離間して配置されることがある。
以下、このような車載システムの動作について説明する。
まず、制御部12が行うアンテナ設置位置情報格納処理について説明する。
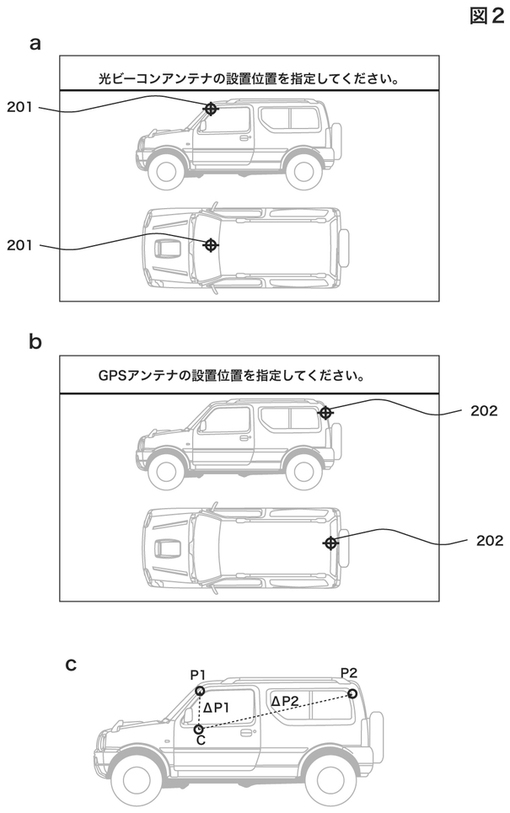
このアンテナ設置位置情報格納処理において、制御部12は、まず、図2aに示すような、自車形状を表した光ビーコンアンテナ位置受付画面を表示装置20に表示し、ユーザから操作部19を介して光ビーコンアンテナ17の自車上の設置位置201の指定を受け付ける。また、同様に、図2bに示すような、自車形状を表したGPSアンテナ位置受付画面を表示装置20に表示し、ユーザから操作部19を介してGPSアンテナ14の自車上の設置位置202の指定を受け付ける。
【0014】
そして、図2cに示すように求まる、予め定められている自車の中心位置Cを原点する指定された光ビーコンアンテナ17の自車上の設置位置P1の位置ベクトルΔP1と、中心位置Cを原点する指定されたGPSアンテナ14の自車上の設置位置P2の位置ベクトルΔP2とを求め、メモリ11に格納する。
【0015】
次に、GPS受信機15はGPSアンテナ14でGPS衛星より受信した電波に基づいてGPSアンテナ14の位置座標を求める衛星測位を行う、衛星測位した位置を衛星測位位置としてGPS位置補正部16に出力する。
そして、GPS位置補正部16は、後述するGPS位置補正処理によって、衛星測位位置を補正してGPS位置としてナビゲーション装置13に出力する。
また、ナビゲーション装置13は、車速センサや各速度センサなどの自律航法用センサと、地図データとを備えており、自律航法用センサによって求めた現在位置と、GPS位置補正部16から出力されたGPS位置と、地図データとに基づいて、自車の最も確からしい現在位置を算定し、算定した現在位置を地図上で表した案内画像を表示装置20に表示する処理などを行う。
【0016】
次に、光ビーコン受信機18は、道路上の各地点に固定設置されている光ビーコン送信機である路側機から光ビーコン信号を受信し、光ビーコン信号で受信した各種交通情報を制御部12に通知し、制御部12は、通知された交通情報を表示装置20に表示する処理などを行う。また、光ビーコン受信機18は、路側機から自車位置情報を受信した場合には、これをGPS位置補正部16に通知する。
【0017】
以下、上述のようにGPS位置補正部16が行うGPS位置補正処理について説明する。
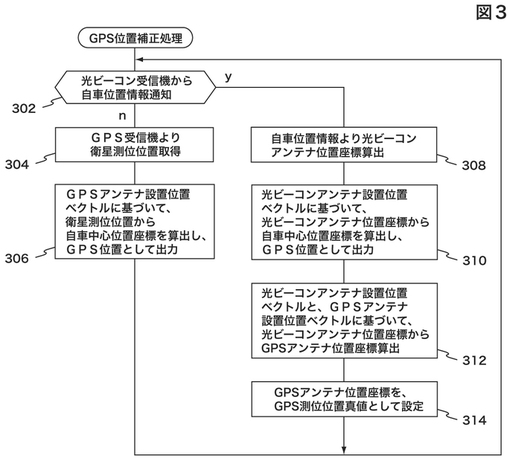
図3に、このGPS位置補正処理の手順を示す。
図示するように、この処理では、光ビーコン受信機18が路側機から、受信した自車位置情報が通知されていないときには(ステップ302)、GPS受信機15から衛星測位位置を取得し(ステップ304)、GPS受信機15から取得した衛星測位位置から、メモリ11に格納されている、GPSアンテナ14の自車上の設置位置P2の位置ベクトルΔP2を減算することにより、自車の中心位置Cの位置座標を算出し、GPS位置としてナビゲーション装置13に出力する(ステップ306)処理を繰り返す。
【0018】
一方、路側機から受信した自車位置情報が通知されたときには、通知された自車位置情報に基づいて、光ビーコンアンテナ17の設置位置の位置座標を算出する(ステップ308)。ここで、この通知された自車位置情報に基づく、光ビーコンアンテナ17の設置位置の位置座標の算出法の詳細については後述する。
【0019】
そして、光ビーコンアンテナ17の設置位置の位置座標から、メモリ11に格納されている、光ビーコンアンテナ17の自車上の設置位置P1の位置ベクトルΔP1を減算して、自車の中心位置Cの位置座標を算出し、GPS位置としてナビゲーション装置13に出力する(ステップ310)。
【0020】
また、光ビーコンアンテナ17の設置位置の位置座標から、光ビーコンアンテナ17の自車上の設置位置P1の位置ベクトルΔP1を減算し、GPSアンテナ14の自車上の設置位置P2の位置ベクトルΔP2を加算することにより、GPSアンテナ14の位置座標を求める(ステップ312)。
【0021】
そして、求めたGPSアンテナ14の位置座標を、GPS測位位置の真値としてGPS受信機15に設定し(ステップ314)、ステップ302からの処理に戻る。
ここで、GPS受信機15は、GPS衛星から受信した電波から求める衛星測位位置を、設定されている補正情報に基づいて補正する機能を備えており、GPS位置補正部16からGPS測位位置の真値が設定されると、当該真値と、その時点でGPS衛星から受信した電波から求めている衛星測位位置との誤差に基づいて、当該誤差が解消する補正を行う補正情報を求め、補正情報の設定を更新する。この補正情報の算出は、たとえば、周知のDGPSの原理などを用いて行う。そして、以降は、更新された補正情報に基づいた補正を行いながら、GPS衛星から受信した電波から衛星測位位置を求める。
【0022】
ここで、前述したように、ステップ308において行う、路側機から通知された自車位置情報からの、光ビーコンアンテナ17の設置位置の位置座標の算出法について説明する。
この算出法は、路側機から通知された自車位置情報が、光ビーコンアンテナ17の設置位置の位置座標を表している場合には、路側機から通知された自車位置情報を、そのまま光ビーコンアンテナ17の設置位置の位置座標として用いることができる。
一方、路側機から通知された自車位置情報が、光ビーコンアンテナ17の設置位置の位置座標を表さない場合には、路側機から通知された自車位置情報が表す自車上の位置と光ビーコンアンテナ17の設置位置の位置関係に応じて、光ビーコンアンテナ17の設置位置の位置座標を求めるようにする。
【0023】
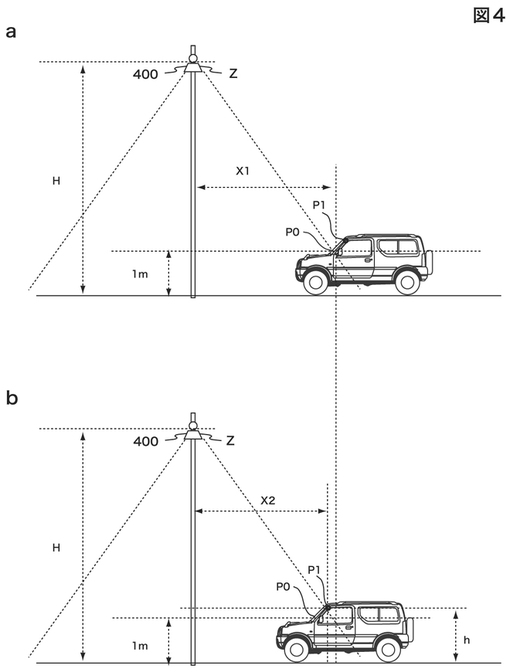
すなわち、たとえば、図4aに示すように、路側機400から通知される自車位置情報が、路側機400がカメラやレーダ装置により検出した、自車の地上高さ1mの位置が、初めて路側機400からの光ビーコンの送信範囲内に入った時点の、当該初めて路側機400からの光ビーコンの送信範囲内に入った自車上の地上高さ1mの位置P0までの、路側機400からの距離X1と、路側機400の位置座標Zである場合には、次のようにビーコンアンテナの設置位置の位置座標を求めることができる。
【0024】
すなわち、この場合には、光ビーコンアンテナ17の自車上の設置位置P1が光ビーコンの送信範囲内に入って自車位置情報を受信できるようになった時点の、光ビーコンアンテナ17の自車上の設置位置P1までの路側機400からの距離X2は、自車の中心位置Cの地上高さと光ビーコンアンテナ17の自車上の設置位置P1の位置ベクトルΔP1とより予め既知の光ビーコンアンテナ設置位置の地上高さhと、路側機400の位置座標Zより求まる路側機400の設置地上高さHとより、幾何学的に、X2={(H-h)/(H-1)}X1として求めることができる。したがって、この時点のビーコンアンテナの設置位置の位置座標は、路側機400の位置座標Zに距離X2を加えた位置座標として算定することができる。
【0025】
以上、GPS位置補正処理について説明した。
なお、以上のGPS位置補正処理では、ステップ314を、求めたGPSアンテナ14の位置座標と、その時点でGPS受信機15から取得している衛星測位位置座標のと差分を補正値として算出し保存する処理としてもよい。ただし、この場合には、GPS位置補正部16では、ステップ306において、GPS受信機15から取得した衛星測位位置から、メモリ11に格納されている、GPSアンテナ14の自車上の設置位置P2の位置ベクトルΔP2を減算し、保存されている補正値を加算することにより、GPS位置を算出して、ナビゲーション装置13に出力するようにする。
【0026】
また、以上のGPS位置補正処理では、ステップ310の処理を行わないようにしてもよい。このようにしても、ステップ312、314の処理によって、以降、GPS受信機15によって正しく補正された衛星測位位置が算出されるので、GPS位置補正部16によって補正されたGPS位置を出力することができる。
【0027】
また、逆に、以上のGPS位置補正処理では、ステップ312、314の処理を行わないようにしてもよい。但し、この場合には、ステップ310で出力されたGPS位置を、ナビゲーション装置13において、真の現在位置として用いると共に、以降、所定期間は、この真の現在位置とした位置を基準として自律航法により求まる位置を、現在位置として用いるなど、以降、ステップ310で出力されたGPS位置を基準として現在位置が定められるようにする。
【0028】
以上のように、本実施形態によれば、GPSアンテナ14の自車上の設置位置と光ビーコンアンテナ17の自車上の設置位置との相対的な位置関係を考慮して、光ビーコン信号を利用したGPS位置の補正や、GPS受信機15における衛星測位の補正を行うので、GPSアンテナの設置位置によらずに、光ビーコン信号を利用して、GPSによる衛星測位を用いて算定する現在位置を正しく補正することができる。
【符号の説明】
【0029】
11…メモリ、12…制御部、13…ナビゲーション装置、14…GPSアンテナ、15…GPS受信機、16…GPS位置補正部、17…光ビーコンアンテナ、18…光ビーコン受信機、19…操作部、20…表示装置、400…路側機。
【技術分野】
【0001】
本発明は、自動車に搭載された車載システムにおいて現在位置を算出する技術に関するものである。
【背景技術】
【0002】
自動車に搭載された車載システムにおいて現在位置を算出する技術としては、GPSによる衛星測位によって現在位置を算出する技術が広く用いられている。
また、外部に固定設置された光ビーコン送信機から受信した光ビーコン信号より現在位置を算定したり、光ビーコン信号より算定した現在位置を用いて、GPSによる衛星測位によって算定した現在位置を補正する技術も知られている(たとえば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008-89353号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
さて、上述のように、自動車に搭載された車載システムにおいて、GPSによる衛星測位によって現在位置を算出する場合、算出される現在位置は、GPS受信機のGPSアンテナの設置位置となる。
一方、外部に固定設置された光ビーコン送信機から受信した光ビーコン信号より算定される現在位置は、必ずしもGPSアンテナの設置位置とはならず、光ビーコン受信機の光ビーコンアンテナの設置位置や、自動車上の所定の基準位置となる。
そして、このために、GPSアンテナの設置位置や光ビーコンアンテナの設置位置によっては、光ビーコン信号より算定した現在位置を用いて、GPSによる衛星測位によって算定した現在位置を正しく補正できなくなる場合がある。
そこで、本発明は、GPSアンテナの設置位置や光ビーコンアンテナの設置位置によらずに、光ビーコン信号より算定した現在位置を用いて、GPSによる衛星測位によって算定した現在位置を正しく補正することを課題とする。
【課題を解決するための手段】
【0005】
前記課題達成のために、本発明は、自動車に搭載される車載システムに、衛星測位を行うGPS受信機と、路側機から送信される光ビーコン信号を受信する光ビーコン受信機と、前記GPS受信機のGPSアンテナの前記自動車上の設置位置と、前記光ビーコン装置の光ビーコンアンテナの前記自動車上の設置位置を記憶した設置位置記憶手段と、前記GPS受信機が衛星測位した位置座標と、前記設置位置記憶手段に記憶されている、前記GPS受信機のGPSアンテナの前記自動車上の設置位置とに基づいて、前記自動車上の基準位置の位置座標を求めて現在位置とする現在位置算出手段と、前記光ビーコン装置で受信した光ビーコン信号に基づいて求まる前記ビーコンアンテナの位置座標と、前記設置位置記憶手段に記憶されている、前記光ビーコンアンテナの前記自動車上の設置位置とより求まる前記自動車上の基準位置の位置座標に、前記現在位置算出手段が算出している現在位置を補正するGPS位置補正手段とを備えたものである。
【0006】
また、本発明は、前記課題達成のために、自動車に搭載される車載システムに、衛星測位を行うGPS受信機と、路側機から送信される光ビーコン信号を受信する光ビーコン受信機と、前記GPS受信機のGPSアンテナの前記自動車上の設置位置と、前記光ビーコン装置の光ビーコンアンテナの前記自動車上の設置位置を記憶した設置位置記憶手段と、前記光ビーコン装置で受信した光ビーコン信号に基づいて求まる前記ビーコンアンテナの位置座標と、前記設置位置記憶手段に記憶されている、前記GPSアンテナの前記自動車上の設置位置と前記光ビーコンアンテナの前記自動車上の設置位置との相対位置関係とより、前記GPSアンテナの位置座標を算出し、算出した前記GPSアンテナの位置座標と、前記GPS受信機が衛星測位している位置座標との誤差に基づく、衛星測位位置の補正を前記GPS受信機に行わせるGPS位置補正手段とを備えたものである。
【0007】
ここで、これらの車載システムには、さらに前記自動車の形状を表した画面上で、前記GPSアンテナの前記自動車上の設置位置と、前記光ビーコンアンテナの前記自動車上の設置位置の指定を受け付けて、前記設置位置記憶手段に格納する設置位置受付手段を設けるようにしてもよい。
【0008】
これらの車載システムによれば、GPSアンテナの自車上の設置位置と光ビーコンアンテナの自車上の設置位置との相対的な位置関係を考慮して、光ビーコン信号を利用した、GPS受信機の衛星測位位置に基づく現在位置の補正や、GPS受信機における衛星測位の補正を行うので、GPSアンテナの設置位置や光ビーコンアンテナの設置位置によらずに、光ビーコン信号を利用して、GPSによる衛星測位を用いて算定する現在位置を正しく補正することができる。
【発明の効果】
【0009】
以上のように、本発明によれば、GPSアンテナや光ビーコンアンテナの設置位置によらずに、光ビーコン信号より算定した現在位置用いて、GPSによる衛星測位を用いて算定する現在位置を正しく補正することができる。
【図面の簡単な説明】
【0010】
【図1】本発明の実施形態に係る車載システムの構成を示す図である。
【図2】本発明の実施形態に係る車載システムの表示例を示す図である。
【図3】本発明の実施形態に係るGPS位置補正処理を示すフローチャートである。
【図4】本発明の実施形態に係る光ビーコンアンテナの座標算出例を示す図である。
【発明を実施するための形態】
【0011】
以下、本発明の実施形態について説明する。
図1aに、本実施形態に係る車載システムの構成を示す。
車載システムは、自動車に搭載されるシステムであり、図示するように、メモリ11、制御部12、ナビゲーション装置13、GPSアンテナ14を備えたGPS受信機15、GPS位置補正部16、光ビーコンアンテナ17を備えた光ビーコン受信機18、操作部19、表示装置20とを備えている。
【0012】
但し、車載システムは、ハードウエア的には、マイクロプロセッサや、メモリや、その他の周辺デバイスを有する一般的な構成を備えたコンピュータを利用して構成されるものであってよく、この場合、以上に示した車載システムの各部もしくはその一部は、マイクロプロセッサが予め用意されたプログラムを実行することにより具現化するプロセスとして実現されるものであって良い。また、この場合、このようなプログラムは、記録媒体や適当な通信路を介して、車載システムに提供されるものであって良い。
【0013】
さて、ここで、光ビーコンアンテナ17と、GPSアンテナ14は、たとえば、図1bに示すように、光ビーコンアンテナ17は車室前方上部に設置され、GPSアンテナ14は車両後部に設置されるなど、離間して配置されることがある。
以下、このような車載システムの動作について説明する。
まず、制御部12が行うアンテナ設置位置情報格納処理について説明する。
このアンテナ設置位置情報格納処理において、制御部12は、まず、図2aに示すような、自車形状を表した光ビーコンアンテナ位置受付画面を表示装置20に表示し、ユーザから操作部19を介して光ビーコンアンテナ17の自車上の設置位置201の指定を受け付ける。また、同様に、図2bに示すような、自車形状を表したGPSアンテナ位置受付画面を表示装置20に表示し、ユーザから操作部19を介してGPSアンテナ14の自車上の設置位置202の指定を受け付ける。
【0014】
そして、図2cに示すように求まる、予め定められている自車の中心位置Cを原点する指定された光ビーコンアンテナ17の自車上の設置位置P1の位置ベクトルΔP1と、中心位置Cを原点する指定されたGPSアンテナ14の自車上の設置位置P2の位置ベクトルΔP2とを求め、メモリ11に格納する。
【0015】
次に、GPS受信機15はGPSアンテナ14でGPS衛星より受信した電波に基づいてGPSアンテナ14の位置座標を求める衛星測位を行う、衛星測位した位置を衛星測位位置としてGPS位置補正部16に出力する。
そして、GPS位置補正部16は、後述するGPS位置補正処理によって、衛星測位位置を補正してGPS位置としてナビゲーション装置13に出力する。
また、ナビゲーション装置13は、車速センサや各速度センサなどの自律航法用センサと、地図データとを備えており、自律航法用センサによって求めた現在位置と、GPS位置補正部16から出力されたGPS位置と、地図データとに基づいて、自車の最も確からしい現在位置を算定し、算定した現在位置を地図上で表した案内画像を表示装置20に表示する処理などを行う。
【0016】
次に、光ビーコン受信機18は、道路上の各地点に固定設置されている光ビーコン送信機である路側機から光ビーコン信号を受信し、光ビーコン信号で受信した各種交通情報を制御部12に通知し、制御部12は、通知された交通情報を表示装置20に表示する処理などを行う。また、光ビーコン受信機18は、路側機から自車位置情報を受信した場合には、これをGPS位置補正部16に通知する。
【0017】
以下、上述のようにGPS位置補正部16が行うGPS位置補正処理について説明する。
図3に、このGPS位置補正処理の手順を示す。
図示するように、この処理では、光ビーコン受信機18が路側機から、受信した自車位置情報が通知されていないときには(ステップ302)、GPS受信機15から衛星測位位置を取得し(ステップ304)、GPS受信機15から取得した衛星測位位置から、メモリ11に格納されている、GPSアンテナ14の自車上の設置位置P2の位置ベクトルΔP2を減算することにより、自車の中心位置Cの位置座標を算出し、GPS位置としてナビゲーション装置13に出力する(ステップ306)処理を繰り返す。
【0018】
一方、路側機から受信した自車位置情報が通知されたときには、通知された自車位置情報に基づいて、光ビーコンアンテナ17の設置位置の位置座標を算出する(ステップ308)。ここで、この通知された自車位置情報に基づく、光ビーコンアンテナ17の設置位置の位置座標の算出法の詳細については後述する。
【0019】
そして、光ビーコンアンテナ17の設置位置の位置座標から、メモリ11に格納されている、光ビーコンアンテナ17の自車上の設置位置P1の位置ベクトルΔP1を減算して、自車の中心位置Cの位置座標を算出し、GPS位置としてナビゲーション装置13に出力する(ステップ310)。
【0020】
また、光ビーコンアンテナ17の設置位置の位置座標から、光ビーコンアンテナ17の自車上の設置位置P1の位置ベクトルΔP1を減算し、GPSアンテナ14の自車上の設置位置P2の位置ベクトルΔP2を加算することにより、GPSアンテナ14の位置座標を求める(ステップ312)。
【0021】
そして、求めたGPSアンテナ14の位置座標を、GPS測位位置の真値としてGPS受信機15に設定し(ステップ314)、ステップ302からの処理に戻る。
ここで、GPS受信機15は、GPS衛星から受信した電波から求める衛星測位位置を、設定されている補正情報に基づいて補正する機能を備えており、GPS位置補正部16からGPS測位位置の真値が設定されると、当該真値と、その時点でGPS衛星から受信した電波から求めている衛星測位位置との誤差に基づいて、当該誤差が解消する補正を行う補正情報を求め、補正情報の設定を更新する。この補正情報の算出は、たとえば、周知のDGPSの原理などを用いて行う。そして、以降は、更新された補正情報に基づいた補正を行いながら、GPS衛星から受信した電波から衛星測位位置を求める。
【0022】
ここで、前述したように、ステップ308において行う、路側機から通知された自車位置情報からの、光ビーコンアンテナ17の設置位置の位置座標の算出法について説明する。
この算出法は、路側機から通知された自車位置情報が、光ビーコンアンテナ17の設置位置の位置座標を表している場合には、路側機から通知された自車位置情報を、そのまま光ビーコンアンテナ17の設置位置の位置座標として用いることができる。
一方、路側機から通知された自車位置情報が、光ビーコンアンテナ17の設置位置の位置座標を表さない場合には、路側機から通知された自車位置情報が表す自車上の位置と光ビーコンアンテナ17の設置位置の位置関係に応じて、光ビーコンアンテナ17の設置位置の位置座標を求めるようにする。
【0023】
すなわち、たとえば、図4aに示すように、路側機400から通知される自車位置情報が、路側機400がカメラやレーダ装置により検出した、自車の地上高さ1mの位置が、初めて路側機400からの光ビーコンの送信範囲内に入った時点の、当該初めて路側機400からの光ビーコンの送信範囲内に入った自車上の地上高さ1mの位置P0までの、路側機400からの距離X1と、路側機400の位置座標Zである場合には、次のようにビーコンアンテナの設置位置の位置座標を求めることができる。
【0024】
すなわち、この場合には、光ビーコンアンテナ17の自車上の設置位置P1が光ビーコンの送信範囲内に入って自車位置情報を受信できるようになった時点の、光ビーコンアンテナ17の自車上の設置位置P1までの路側機400からの距離X2は、自車の中心位置Cの地上高さと光ビーコンアンテナ17の自車上の設置位置P1の位置ベクトルΔP1とより予め既知の光ビーコンアンテナ設置位置の地上高さhと、路側機400の位置座標Zより求まる路側機400の設置地上高さHとより、幾何学的に、X2={(H-h)/(H-1)}X1として求めることができる。したがって、この時点のビーコンアンテナの設置位置の位置座標は、路側機400の位置座標Zに距離X2を加えた位置座標として算定することができる。
【0025】
以上、GPS位置補正処理について説明した。
なお、以上のGPS位置補正処理では、ステップ314を、求めたGPSアンテナ14の位置座標と、その時点でGPS受信機15から取得している衛星測位位置座標のと差分を補正値として算出し保存する処理としてもよい。ただし、この場合には、GPS位置補正部16では、ステップ306において、GPS受信機15から取得した衛星測位位置から、メモリ11に格納されている、GPSアンテナ14の自車上の設置位置P2の位置ベクトルΔP2を減算し、保存されている補正値を加算することにより、GPS位置を算出して、ナビゲーション装置13に出力するようにする。
【0026】
また、以上のGPS位置補正処理では、ステップ310の処理を行わないようにしてもよい。このようにしても、ステップ312、314の処理によって、以降、GPS受信機15によって正しく補正された衛星測位位置が算出されるので、GPS位置補正部16によって補正されたGPS位置を出力することができる。
【0027】
また、逆に、以上のGPS位置補正処理では、ステップ312、314の処理を行わないようにしてもよい。但し、この場合には、ステップ310で出力されたGPS位置を、ナビゲーション装置13において、真の現在位置として用いると共に、以降、所定期間は、この真の現在位置とした位置を基準として自律航法により求まる位置を、現在位置として用いるなど、以降、ステップ310で出力されたGPS位置を基準として現在位置が定められるようにする。
【0028】
以上のように、本実施形態によれば、GPSアンテナ14の自車上の設置位置と光ビーコンアンテナ17の自車上の設置位置との相対的な位置関係を考慮して、光ビーコン信号を利用したGPS位置の補正や、GPS受信機15における衛星測位の補正を行うので、GPSアンテナの設置位置によらずに、光ビーコン信号を利用して、GPSによる衛星測位を用いて算定する現在位置を正しく補正することができる。
【符号の説明】
【0029】
11…メモリ、12…制御部、13…ナビゲーション装置、14…GPSアンテナ、15…GPS受信機、16…GPS位置補正部、17…光ビーコンアンテナ、18…光ビーコン受信機、19…操作部、20…表示装置、400…路側機。
【特許請求の範囲】
【請求項1】
自動車に搭載される車載システムであって、
衛星測位を行うGPS受信機と、
路側機から送信される光ビーコン信号を受信する光ビーコン受信機と、
前記GPS受信機のGPSアンテナの前記自動車上の設置位置と、前記光ビーコン装置の光ビーコンアンテナの前記自動車上の設置位置を記憶した設置位置記憶手段と、
前記GPS受信機が衛星測位した位置座標と、前記設置位置記憶手段に記憶されている、前記GPS受信機のGPSアンテナの前記自動車上の設置位置とに基づいて、前記自動車上の基準位置の位置座標を求めて現在位置とする現在位置算出手段と、
前記光ビーコン装置で受信した光ビーコン信号に基づいて求まる前記ビーコンアンテナの位置座標と、前記設置位置記憶手段に記憶されている、前記光ビーコンアンテナの前記自動車上の設置位置とより求まる前記自動車上の基準位置の位置座標に、前記現在位置算出手段が算出している現在位置を補正するGPS位置補正手段とを有することを特徴とする車載システム。
【請求項2】
自動車に搭載される車載システムであって、
衛星測位を行うGPS受信機と、
路側機から送信される光ビーコン信号を受信する光ビーコン受信機と、
前記GPS受信機のGPSアンテナの前記自動車上の設置位置と、前記光ビーコン装置の光ビーコンアンテナの前記自動車上の設置位置を記憶した設置位置記憶手段と、
前記光ビーコン装置で受信した光ビーコン信号に基づいて求まる前記ビーコンアンテナの位置座標と、前記設置位置記憶手段に記憶されている、前記GPSアンテナの前記自動車上の設置位置と前記光ビーコンアンテナの前記自動車上の設置位置との相対位置関係とより、前記GPSアンテナの位置座標を算出し、算出した前記GPSアンテナの位置座標と、前記GPS受信機が衛星測位している位置座標との誤差に基づく、衛星測位位置の補正を前記GPS受信機に行わせるGPS位置補正手段とを有することを特徴とする車載システム。
【請求項3】
請求項1または2記載の車載システムであって、
前記自動車の形状を表した画面上で、前記GPSアンテナの前記自動車上の設置位置と、前記光ビーコンアンテナの前記自動車上の設置位置の指定を受け付けて、前記設置位置記憶手段に格納する設置位置受付手段を有することを特徴とする車載システム。
【請求項1】
自動車に搭載される車載システムであって、
衛星測位を行うGPS受信機と、
路側機から送信される光ビーコン信号を受信する光ビーコン受信機と、
前記GPS受信機のGPSアンテナの前記自動車上の設置位置と、前記光ビーコン装置の光ビーコンアンテナの前記自動車上の設置位置を記憶した設置位置記憶手段と、
前記GPS受信機が衛星測位した位置座標と、前記設置位置記憶手段に記憶されている、前記GPS受信機のGPSアンテナの前記自動車上の設置位置とに基づいて、前記自動車上の基準位置の位置座標を求めて現在位置とする現在位置算出手段と、
前記光ビーコン装置で受信した光ビーコン信号に基づいて求まる前記ビーコンアンテナの位置座標と、前記設置位置記憶手段に記憶されている、前記光ビーコンアンテナの前記自動車上の設置位置とより求まる前記自動車上の基準位置の位置座標に、前記現在位置算出手段が算出している現在位置を補正するGPS位置補正手段とを有することを特徴とする車載システム。
【請求項2】
自動車に搭載される車載システムであって、
衛星測位を行うGPS受信機と、
路側機から送信される光ビーコン信号を受信する光ビーコン受信機と、
前記GPS受信機のGPSアンテナの前記自動車上の設置位置と、前記光ビーコン装置の光ビーコンアンテナの前記自動車上の設置位置を記憶した設置位置記憶手段と、
前記光ビーコン装置で受信した光ビーコン信号に基づいて求まる前記ビーコンアンテナの位置座標と、前記設置位置記憶手段に記憶されている、前記GPSアンテナの前記自動車上の設置位置と前記光ビーコンアンテナの前記自動車上の設置位置との相対位置関係とより、前記GPSアンテナの位置座標を算出し、算出した前記GPSアンテナの位置座標と、前記GPS受信機が衛星測位している位置座標との誤差に基づく、衛星測位位置の補正を前記GPS受信機に行わせるGPS位置補正手段とを有することを特徴とする車載システム。
【請求項3】
請求項1または2記載の車載システムであって、
前記自動車の形状を表した画面上で、前記GPSアンテナの前記自動車上の設置位置と、前記光ビーコンアンテナの前記自動車上の設置位置の指定を受け付けて、前記設置位置記憶手段に格納する設置位置受付手段を有することを特徴とする車載システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−169539(P2010−169539A)
【公開日】平成22年8月5日(2010.8.5)
【国際特許分類】
【出願番号】特願2009−12442(P2009−12442)
【出願日】平成21年1月23日(2009.1.23)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成22年8月5日(2010.8.5)
【国際特許分類】
【出願日】平成21年1月23日(2009.1.23)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]