
車載ナビゲーション装置及び自車位置推定方法
【課題】屋内駐車場などのGPS信号の受信が困難な施設内で、施設側の設備に依存することなく、自車位置を精度良く推定することができるようにする。
【解決手段】周回走行判定部27が走行軌跡算出部25によって算出された自車の走行軌跡に基づいて、自車が周回走行を行っているか否かを判定する。周回走行判定部27により自車が周回走行を行っていると判定された場合、自車位置推定部24は、走行軌跡記憶部26に記憶されている周回走行の走行軌跡と、走行距離検出部22により検出された自車の走行距離とに基づいて、自車位置を推定する。
【解決手段】周回走行判定部27が走行軌跡算出部25によって算出された自車の走行軌跡に基づいて、自車が周回走行を行っているか否かを判定する。周回走行判定部27により自車が周回走行を行っていると判定された場合、自車位置推定部24は、走行軌跡記憶部26に記憶されている周回走行の走行軌跡と、走行距離検出部22により検出された自車の走行距離とに基づいて、自車位置を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車位置を推定して自車の走行を補助するための各種情報を提示する車載ナビゲーション装置、及び車載ナビゲーション装置における自車位置推定方法に関する。
【背景技術】
【0002】
従来、地図上に自車位置マークを重畳して表示したり、自車を目的地まで誘導する経路誘導などを行って自車の走行を補助する車載ナビゲーション装置が普及している。車載ナビゲーション装置における自車位置の推定は、一般に、GPS(Global Positioning System)衛星から送信されるGPS信号に基づいて自車の絶対位置を所定周期で求めるとともに、ジャイロセンサや車速センサなどを用いた自立航法により自車の移動相対位置を求め、これら絶対位置と相対移動位置とから正確な自車位置を推定するといった手法で行われている。また、自車位置に誤差が生じたときにそれを補正する手法として、推定した自車位置が地図データの道路上から外れているときに、最も確からしい道路上の位置に自車位置をマッチングするマップマッチングという手法が知られている。
【0003】
ところで、この種の車載ナビゲーション装置では、例えば、屋内駐車場などの施設内においてはGPS信号を受信できず、また、マップマッチングもマッチングフリーの状態となるので、このような状況では自立航法のみに頼った自車位置の推定が行われることになる。しかしながら、屋内駐車場などは、螺旋状の走行路に沿って駐車スペースを配置して螺旋状の走行路を周回させながら車両を空きスペースに導く構造のものが多く、自立航法のみに頼った自車位置の推定では、自車が螺旋状の走行路に沿って周回を繰り返すうちにジャイロセンサの誤差が蓄積されて、自車の進行方位に大きな検出誤差が生じ、推定した自車位置が実際の位置から大きくずれてしまうという問題がある。
【0004】
このような問題に鑑み、屋内駐車場などにおいても自立航法のみに頼らずに自車位置を推定する手法が種々検討されている(例えば、特許文献1参照。)。特許文献1には、屋内駐車場などのGPS信号の受信が困難な場所に信号輻射装置を設置して、GPS衛星からのGPS信号をこの信号輻射装置で受信、増幅して、車両に対して輻射することで、GPS信号が直接到達できない場所にいる車両でもGPS信号を受信できるようにするという技術が開示されている。
【特許文献1】特開2003−57330号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1に記載された技術は、屋内駐車場などの施設に信号輻射装置を設置することを前提としているため、大がかりな設備が必要となり、施設側に設備投資などのコスト面で大きな負担を強いることになる。また、施設側の設備に依存することになるので、このような設備がない施設では自車位置の推定精度を向上させることはできず、根本的な解決には至らない。
【0006】
本発明は、以上のような従来の実情に鑑みて創案されたものであって、屋内駐車場などのGPS信号の受信が困難な施設内で、施設側の設備に依存することなく、自車位置を精度良く推定することができる車載ナビゲーション装置及び自車位置推定方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明は、前記目的を達成するために、自車の走行軌跡を算出して記憶するとともに自車の走行軌跡に基づいて自車が周回走行を行っているかどうかを判定し、自車が周回走行を行っていると判定したときには、その周回走行の走行軌跡と自車の走行距離とに基づいて自車位置を推定するようにした。
【発明の効果】
【0008】
本発明によれば、自車が屋内駐車場などの施設内を周回走行する場合であっても、施設側の設備に依存することなく、自車位置を精度良く推定することができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明を適用した車載ナビゲーション装置の具体的な実施形態について、図面を参照しながら詳細に説明する。
【0010】
本発明を適用した車載ナビゲーション装置は、当該車載ナビゲーション装置が搭載される車両(自車)の現在位置(自車位置)を推定し、それに基づいて、自車位置周辺の地図に自車位置マークを重畳して表示したり、自車位置から設定された目的地までの最適経路を探索し、探索した最適経路に沿って自車を目的地まで誘導したりといった、自車の走行を補助する各種情報提供を行うものである。そして、特に本発明を適用した車載ナビゲーション装置は、自車が屋内駐車場などの施設内を周回走行する場合であっても、自車位置を精度良く推定できるようにした点に特徴を有している。以下、この本発明に特徴的な部分を中心に、本発明の実施形態としての車載ナビゲーション装置について具体的に説明する。
【0011】
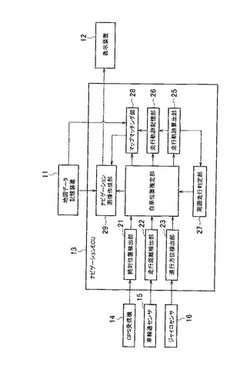
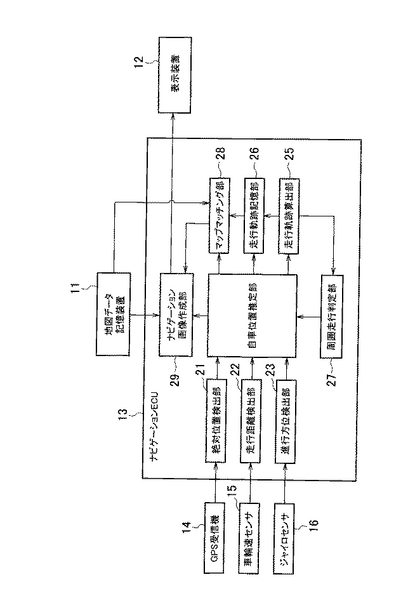
本実施形態の車載ナビゲーション装置の概略構成を図1に示す。図1に示すように、本実施形態の車載ナビゲーション装置は、地図データ記憶装置11と、表示装置12と、ナビゲーションECU(Electronic Control Unit)13とを主要な構成要素とし、ナビゲーションECU13に、GPS受信機14、車輪速センサ15、ジャイロセンサ16がそれぞれ接続された構成とされている。
【0012】
地図データ記憶装置11は、本実施形態の車載ナビゲーション装置で扱われる地図データを記憶するものであり、DVD(Digital Versatile Disc)等の記録媒体を有している。地図データは、地図上の地点を示すノードデータと各ノード間を連結する道路を示すリンクデータとで構成される道路網データの他、名称データや施設に関するデータなど、地図を表示する上で必要な各種データから構成される。この地図データ記憶装置11に記憶されている地図データは、ナビゲーションECU13からの指令に基づいて適宜読み出されて、ナビゲーションECU13へと送られる。なお、地図データ記憶装置11の記録媒体としては、上述したDVD以外にも、CD(Compact Disc)やメモリカード、ハードディスク等の様々な仕様の記録媒体が採用可能である。また、車載ナビゲーション装置が無線通信等によるデータ通信機能を有している場合には、地図データの配信サービスを行うサービスセンタ等からの地図データを取得して、ナビゲーションECU13へと送る構成を採用してもよい。
【0013】
表示装置12は、ナビゲーションECU13による制御のもとで、自車位置マークを重畳した地図や経路情報、その他の詳細情報などの各種情報を、ナビゲーション画像として表示するものである。この表示装置12としては、例えば液晶ディスプレイやプロジェクタ装置等の車両に搭載可能な各種表示装置が適用可能である。
【0014】
GPS受信機14は、全地球測位システム(GPS:Global Positioning System)の衛星から送られるGPS信号を周期的に受信するものである。このGPS受信機14で受信されたGPS信号は、所定周期でナビゲーションECU13に送られ、ナビゲーションECU13での自車の絶対位置検出処理に用いられる。
【0015】
車輪速センサ15は、自車の車輪の回転速度を検出して車輪速パルスとして出力するものである。この車輪速センサ15から出力される車輪速パルスは、ナビゲーションECU13に随時送られ、ナビゲーションECU13での自車の走行距離検出処理に用いられる。
【0016】
ジャイロセンサ16は、自車の車体の回転角速度(ヨーレート)を検出するものである。このジャイロセンサ16の検出値は、ナビゲーションECU13に随時送られ、ナビゲーションECU13での自車の進行方位検出処理に用いられる。
【0017】
ナビゲーションECU13は、本実施形態の車載ナビゲーション装置における各種動作を統括的に制御するものであり、CPUやROM、RAMを備えたマイクロコンピュータを中心に、入出力バッファ回路やメモリ回路などから構成される。このナビゲーションECU13は、予めマイクロコンピュータのROMなどに記憶されたナビゲーション用のプログラムを実行してCPUで各種の演算処理を行うことで、本実施形態の車載ナビゲーション装置における各種動作制御を実現し、特に本発明に関わる部分として、図1に示すように、絶対位置検出部21、走行距離検出部22、進行方位検出部23、自車位置推定部24、走行軌跡算出部25、走行軌跡記憶部26、周回走行判定部27、マップマッチング部28、ナビゲーション画像作成部29の各機能を実現する。
【0018】
絶対位置検出部21は、GPS受信機14から所定周期で送られるGPS信号に基づいて、自車の絶対位置を検出する。
【0019】
走行距離検出部22は、車輪速センサ15から随時送られる車輪速パルスをカウントすることで、自車の走行距離を検出する。
【0020】
進行方位検出部23は、ジャイロセンサ16から随時送られる検出値を積分することで、自車の進行方位を検出する。
【0021】
自車位置推定部24は、通常は、絶対値検出部21での検出結果と、走行距離検出部22での検出結果と、進行方位検出部23での検出結果とに基づいて、自車位置を推定する。また、この自車位置推定部24は、GPS受信機11によるGPS信号の受信が途絶えて絶対位置検出部21が自車の絶対位置を検出できない状態にあり、且つ、マップマッチング部28がマッチングフリーの状態にあり、且つ、周回走行判定部27によって自車が周回走行を行っていると判定された場合には、詳細を後述する手法で、走行距離検出部22での検出結果と、走行軌跡記憶部26に記憶されている周回走行の走行軌跡とに基づいて、自車位置を推定する。
【0022】
走行軌跡算出部25は、自車位置推定部24で推定された自車位置を時間的に追跡して、自車の走行軌跡を算出する。
【0023】
走行軌跡記憶部26は、走行軌跡算出部25で算出された自車の走行軌跡を記憶する。
【0024】
周回走行判定部27は、走行軌跡算出部25で算出された自車の走行軌跡に基づいて、自車が周回走行を行っているかどうかを判定する。
【0025】
マップマッチング部28は、地図データ記憶装置11に記憶されている地図データを参照して、自車位置推定部24で推定された自車位置が地図の道路上にあるかどうかを確認し、推定された自車位置が道路上から外れていれば、最も確からしい道路上の位置に自車位置を修正するマップマッチング処理を行う。具体的には、このマップマッチング部28は、例えば、走行軌跡算出部25で算出された現在までの自車の走行軌跡を、地図データの道路網データと比較して、最も高い確率で形状が一致していると思われる地図上の道路を特定し、自車位置推定部24で推定された自車位置がこの道路上から外れた位置となっている場合に、自車位置をこの道路上の位置に自動修正する。
【0026】
ナビゲーション画像作成部29は、地図データ記憶装置11から読み出した地図データに基づいて地図画像を描画するとともに、自車位置推定部24で推定された自車位置またはマップマッチング部28によって修正された自車位置の情報を読み込んで、地図画像上に自車位置マークを重畳したナビゲーション画像を作成する。また、ナビゲーション画像作成部29は、車両の乗員によって図示しない入力装置を用いた操作入力があれば、それに応じて、例えば各種設定画面や探索画面、経路誘導画面などのナビゲーション画像を作成する。このナビゲーション画像作成部29により作成されたナビゲーション画像は、表示装置12に表示される。
【0027】
ここで、以上のように構成される本実施形態の車載ナビゲーション装置において、自車位置を推定する処理について、更に詳しく説明する。
【0028】
本実施形態の車載ナビゲーション装置においては、上述したように、GPS受信機14がGPS信号を受信可能な場合には、ナビゲーションECU13の自車位置推定部24が、絶対位置検出部21の検出結果と、走行距離検出部22の検出結果と、進行方位検出部23の検出結果とに基づいて、自車位置を推定する。ここで、マップマッチング部28でのマップマッチング処理が可能であれば、自車位置推定部24で推定した自車位置にずれが生じた場合に、マップマッチング部28でのマップマッチング処理によりこのずれを自動修正する。したがって、このような状況においては、自車位置を極めて精度良く推定することが可能である。
【0029】
一方、例えばトンネル内や屋内駐車場などの施設内では、GPS受信機14がGPS信号を受信できなくなる場合が多く、このようなGPS信号の受信ができない環境を自車が走行している場合には、ナビゲーションECU13の自車位置推定部24は、絶対位置検出部21の検出結果が得られないので、走行距離検出部22の検出結果と、進行方位検出部23の検出結果とに基づいて、自車位置を推定することになる。この場合も、マップマッチング部28でのマップマッチング処理が可能であれば、自車位置推定部24で推定した自車位置にずれが生じた場合に、マップマッチング部28でのマップマッチング処理によりこのずれを自動修正するので、自車位置を極めて精度良く推定することが可能である。
【0030】
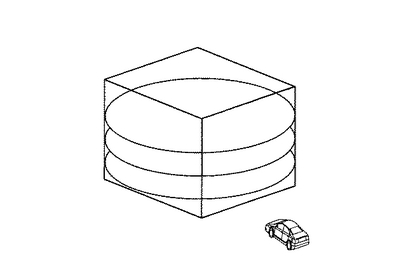
しかしながら、自車が道路上でない施設内を走行する場合には、マップマッチング部28でのマップマッチング処理が行われないマッチングフリーの状態となるので、車輪速センサ15の検出値(走行距離検出部22の検出結果)やジャイロセンサ16の検出値(進行方位検出部23の検出結果)に誤差が生じて、自車位置推定部24で推定した自車位置にずれが生じた場合であっても、このずれを修正することができない。特に、屋内駐車場などでは、図2に示すように、螺旋状の走行路に沿って駐車スペースを配置した構造のものが多く、自車が螺旋状の走行路に沿って周回を繰り返すうちにジャイロセンサ16の誤差が蓄積されて、進行方位検出部23の検出結果に大きな誤差が生じ、自車位置推定部24で推定した自車位置が実際の位置から大きくずれてしまう場合がある。そして、例えば自車が屋内駐車場から外部に出たときに、自車位置マークが全く異なる位置に重畳されたナビゲーション画像を表示装置12に表示してしまい、車両の乗員に進行方向を誤らせる要因となるといった問題が生じる。
【0031】
そこで、本実施形態の車載ナビゲーション装置においては、GPS受信機14によるGPS信号の受信が途絶えた状況にあり、且つ、マップマッチング部28によるマップマッチング処理が行われない状況にあり、且つ、周回走行判定部27によって自車が周回走行を行っていると判定された場合に、ナビゲーションECU13の自車位置推定部24は、ジャイロセンサ16の累積誤差によって大きな誤差が発生することが予想される進行方位検出部23の検出結果を用いずに、走行軌跡記憶部26に記憶された周回走行の走行軌跡と、走行距離検出部23の検出結果とに基づいて、自車位置を推定するようにしている。なお、走行軌跡記憶部26に記憶された周回走行の走行軌跡は、走行軌跡算出部25が自車位置推定部24で推定された自車位置を時間的に追跡して求めたものであるため、進行方位検出部23の検出結果を反映したものであるが、周回走行の最初の1周におけるジャイロセンサ16の誤差はさほど大きくなく、周回走行の最初の1周の走行軌跡はある程度正確に算出できるので、本実施形態の車載ナビゲーション装置では、この周回走行の最初の1周の走行軌跡と、走行距離検出部23の検出結果とに基づいて、その後の周回走行を行っている間の自車位置を推定するようにしている。
【0032】
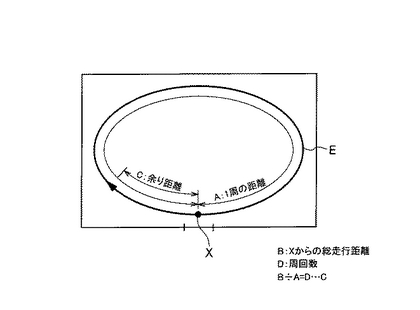
具体的には、ナビゲーションECU13の自車位置推定部24は、上述した3つの条件が揃ったときに、走行軌跡算出部25によって算出されて走行軌跡記憶部26に記憶された直前の周回走行の走行軌跡、例えば図3に示すような周回走行の走行軌跡Eを走行軌跡記憶部26から読み出す。そして、この走行軌跡Eから、周回走行の基点となる位置Xを特定するとともに、周回走行の1周の距離Aを求める。そして、走行距離検出部23の検出結果から、周回走行の基点となる位置Xから自車の現在位置までの走行距離Bを求め、この走行距離Bを1周の距離Aで除して余りの距離Cを求める。そして、周回走行の基点となる位置Xから周回走行の走行軌跡に沿って余り距離C分だけ移動した位置を、自車位置として推定する。
【0033】
なお、周回走行判定部27によって自車が周回走行を行っていると判定された後も、進行方位検出部23は、ジャイロセンサ16の検出値に基づく自車の進行方位の検出を継続して行っている。このときの進行方位検出部23の検出結果は、自車位置の推定処理には用いられないが、自車が周回走行の経路から外れたか否かの判定に用いられる。すなわち、自車が周回走行を繰り返している間は、進行方位検出部23の検出結果がおおよそ同じパターンで変化することになるが、例えば自車が屋内駐車場から外部に出たときなど、周回走行が終了したときには、進行方位検出部23の検出結果の変化のパターンが周回走行を繰り返していたときと大きく異なることになる。したがって、この進行方位検出部23の検出結果をモニタリングしておくことで、自車が周回走行の経路から外れ、例えば屋内駐車場から外部に出たといった状況を判定することが可能となる。
【0034】
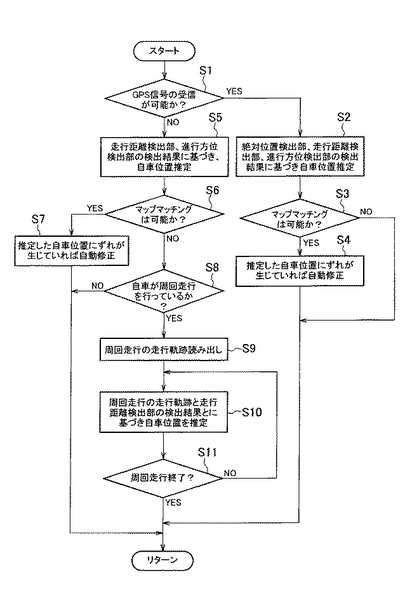
図4は、本実施形態の車載ナビゲーション装置における自車位置を推定する処理の流れの一例を示すフローチャートである。この図4に示す処理フローは、本実施形態の車載ナビゲーション装置におけるナビゲーションECU13内部での処理として実行されるものであり、本実施形態の車載ナビゲーション装置の電源が投入されることにより開始される。
【0035】
この図4に示す処理フローが開始されると、先ず、ステップS1において、GPS受信機14がGPS信号を受信しているか否か、すなわち絶対位置検出部21によって自車の絶対位置の検出処理を行える状況にあるか否かが判定される。このステップS1での判定の結果、絶対位置検出部21による自車の絶対位置の検出処理が行える状況にあると判断されれば、自車位置推定部24が、次のステップS2において、絶対位置検出部21の検出結果と、走行距離検出部22の検出結果と、進行方位検出部23の検出結果とに基づいて、自車位置を推定する。そして、ステップS3において、マップマッチング部28によるマップマッチング処理が可能な状況にあるか否かが判定され、マップマッチング部28でのマップマッチング処理が可能であれば、ステップS4において、自車位置推定部24で推定した自車位置にずれが生じた場合に、マップマッチング部28でのマップマッチング処理によりこのずれを自動修正してナビゲーション画像作成部29に出力し、リターンする。一方、自車位置推定部24で推定した自車位置が道路上でなく、マップマッチング部28でのマップマッチング処理ができない、いわゆるマッチングフリーの状態であれば、自車位置推定部24で推定した自車位置をナビゲーション画像作成部29に出力してリターンする。
【0036】
また、ステップS1での判定の結果、GPS受信機14がGPS信号を受信しておらず、絶対位置検出部21が自車の絶対位置の検出処理を行えない状況にあると判断された場合には、自車位置推定部24は、ステップS5において、走行距離検出部22の検出結果と、進行方位検出部23の検出結果とに基づいて、自車位置を推定する。そして、ステップS6において、マップマッチング部28によるマップマッチング処理が可能な状況にあるか否かが判定され、マップマッチング部28でのマップマッチング処理が可能であれば、ステップS7において、自車位置推定部24で推定した自車位置にずれが生じた場合に、マップマッチング部28でのマップマッチング処理によりこのずれを自動修正してナビゲーション画像作成部29に出力し、リターンする。
【0037】
一方、自車位置推定部24で推定した自車位置が道路上でなく、マップマッチング部28でのマップマッチング処理ができないマッチングフリーの状態であれば、次のステップS8において、周回走行判定部27が、走行軌跡算出部25によって算出された自車の走行軌跡に基づいて、自車が周回走行を行っているか否かを判定する。ここで、自車が周回走行を行っていないと判定された場合には、自車位置推定部24が走行距離検出部22の検出結果と進行方位検出部23の検出結果とに基づいて推定した自車位置をナビゲーション画像作成部29に出力し、リターンする。
【0038】
一方、周回走行判定部27により自車が周回走行を行っていると判定された場合には、次のステップS9において、走行軌跡算出部25によって算出されて走行軌跡記憶部26に記憶された直前の周回走行の走行軌跡が、自車位置推定部24によって読み出される。そして、ステップS10において、自車位置推定部24が、ステップS10で読み出した周回走行の走行軌跡と、走行距離検出部22の検出結果とに基づいて、上述した手法により自車位置を推定し、推定した自車位置をナビゲーション画像作成部29に出力する。
【0039】
その後、自車位置推定部24は、例えば進行方位検出部23の検出結果をモニタリングすることで自車の周回走行が終了したか否かを判定し(ステップS11)、自車の周回走行が継続している間はステップS10での自車位置の推定を繰り返し、自車の周回走行が終了した段階で、リターンする。
【0040】
以上詳細に説明したように、本実施形態の車載ナビゲーション装置では、GPS受信機14によるGPS信号の受信が途絶えた状況にあり、且つ、マップマッチング部28によるマップマッチング処理が行われない状況にあり、且つ、周回走行判定部27によって自車が周回走行を行っていると判定された場合に、ナビゲーションECU13の自車位置推定部24が、走行軌跡記憶部26に記憶された周回走行の走行軌跡と、走行距離検出部23の検出結果とに基づいて、自車位置を推定するようにしている。
【0041】
したがって、この車載ナビゲーション装置においては、屋内駐車場などの施設内で自車が周回走行する場合に、周回走行による累積誤差が懸念されるジャイロセンサ16のセンサ出力に頼ることなく自車位置を推定することができ、精度のよい自車位置の推定が可能となる。
【0042】
また、この車載ナビゲーション装置においては、施設側の設備に依存することなく自車位置の推定が行われるので、施設側に設備投資などのコスト面で大きな負担を強いることもない。
【0043】
なお、以上説明した車載ナビゲーション装置は本発明の一適用例であり、本発明が以上の例に限定されるものではなく、本発明に係る技術的思想を逸脱しない範囲で種々の変更が可能であることは勿論である。例えば、上述した例では、車載ナビゲーション装置が、GPS信号を受信するGPS受信機14や、マップマッチング処理を行うマップマッチング部28を備えていることを前提として説明したが、本発明は、自車が周回走行を行っている場合に、周回走行の走行軌跡と自車の走行距離とに基づいて自車位置を推定することを基本思想としており、GPS信号に基づく絶対位置の検出を行わないナビゲーション装置や、マップマッチング処理を行わないナビゲーション装置に対しても有効に適用可能である。
【図面の簡単な説明】
【0044】
【図1】本発明を適用した車載ナビゲーション装置の概略構成を示すブロック図である。
【図2】屋内駐車場の構造を模式的に示す図である。
【図3】本発明を適用した車載ナビゲーション装置において、自車の周回走行の走行軌跡と走行距離検出部の検出結果とに基づいて自車位置を推定する手法を説明する図である。
【図4】本発明を適用した車載ナビゲーション装置において、自車位置を推定する処理の流れの一例を示すフローチャートである。
【符号の説明】
【0045】
13 ナビゲーションECU
14 GPS受信機
15 車輪速センサ
16 ジャイロセンサ
21 絶対位置検出部
22 走行距離検出部
23 進行方位検出部
24 自車位置推定部
25 走行軌跡算出部
26 走行軌跡記憶部
27 周回走行判定部
28 マップマッチング部
29 ナビゲーション画像作成部
【技術分野】
【0001】
本発明は、自車位置を推定して自車の走行を補助するための各種情報を提示する車載ナビゲーション装置、及び車載ナビゲーション装置における自車位置推定方法に関する。
【背景技術】
【0002】
従来、地図上に自車位置マークを重畳して表示したり、自車を目的地まで誘導する経路誘導などを行って自車の走行を補助する車載ナビゲーション装置が普及している。車載ナビゲーション装置における自車位置の推定は、一般に、GPS(Global Positioning System)衛星から送信されるGPS信号に基づいて自車の絶対位置を所定周期で求めるとともに、ジャイロセンサや車速センサなどを用いた自立航法により自車の移動相対位置を求め、これら絶対位置と相対移動位置とから正確な自車位置を推定するといった手法で行われている。また、自車位置に誤差が生じたときにそれを補正する手法として、推定した自車位置が地図データの道路上から外れているときに、最も確からしい道路上の位置に自車位置をマッチングするマップマッチングという手法が知られている。
【0003】
ところで、この種の車載ナビゲーション装置では、例えば、屋内駐車場などの施設内においてはGPS信号を受信できず、また、マップマッチングもマッチングフリーの状態となるので、このような状況では自立航法のみに頼った自車位置の推定が行われることになる。しかしながら、屋内駐車場などは、螺旋状の走行路に沿って駐車スペースを配置して螺旋状の走行路を周回させながら車両を空きスペースに導く構造のものが多く、自立航法のみに頼った自車位置の推定では、自車が螺旋状の走行路に沿って周回を繰り返すうちにジャイロセンサの誤差が蓄積されて、自車の進行方位に大きな検出誤差が生じ、推定した自車位置が実際の位置から大きくずれてしまうという問題がある。
【0004】
このような問題に鑑み、屋内駐車場などにおいても自立航法のみに頼らずに自車位置を推定する手法が種々検討されている(例えば、特許文献1参照。)。特許文献1には、屋内駐車場などのGPS信号の受信が困難な場所に信号輻射装置を設置して、GPS衛星からのGPS信号をこの信号輻射装置で受信、増幅して、車両に対して輻射することで、GPS信号が直接到達できない場所にいる車両でもGPS信号を受信できるようにするという技術が開示されている。
【特許文献1】特開2003−57330号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上述した特許文献1に記載された技術は、屋内駐車場などの施設に信号輻射装置を設置することを前提としているため、大がかりな設備が必要となり、施設側に設備投資などのコスト面で大きな負担を強いることになる。また、施設側の設備に依存することになるので、このような設備がない施設では自車位置の推定精度を向上させることはできず、根本的な解決には至らない。
【0006】
本発明は、以上のような従来の実情に鑑みて創案されたものであって、屋内駐車場などのGPS信号の受信が困難な施設内で、施設側の設備に依存することなく、自車位置を精度良く推定することができる車載ナビゲーション装置及び自車位置推定方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明は、前記目的を達成するために、自車の走行軌跡を算出して記憶するとともに自車の走行軌跡に基づいて自車が周回走行を行っているかどうかを判定し、自車が周回走行を行っていると判定したときには、その周回走行の走行軌跡と自車の走行距離とに基づいて自車位置を推定するようにした。
【発明の効果】
【0008】
本発明によれば、自車が屋内駐車場などの施設内を周回走行する場合であっても、施設側の設備に依存することなく、自車位置を精度良く推定することができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明を適用した車載ナビゲーション装置の具体的な実施形態について、図面を参照しながら詳細に説明する。
【0010】
本発明を適用した車載ナビゲーション装置は、当該車載ナビゲーション装置が搭載される車両(自車)の現在位置(自車位置)を推定し、それに基づいて、自車位置周辺の地図に自車位置マークを重畳して表示したり、自車位置から設定された目的地までの最適経路を探索し、探索した最適経路に沿って自車を目的地まで誘導したりといった、自車の走行を補助する各種情報提供を行うものである。そして、特に本発明を適用した車載ナビゲーション装置は、自車が屋内駐車場などの施設内を周回走行する場合であっても、自車位置を精度良く推定できるようにした点に特徴を有している。以下、この本発明に特徴的な部分を中心に、本発明の実施形態としての車載ナビゲーション装置について具体的に説明する。
【0011】
本実施形態の車載ナビゲーション装置の概略構成を図1に示す。図1に示すように、本実施形態の車載ナビゲーション装置は、地図データ記憶装置11と、表示装置12と、ナビゲーションECU(Electronic Control Unit)13とを主要な構成要素とし、ナビゲーションECU13に、GPS受信機14、車輪速センサ15、ジャイロセンサ16がそれぞれ接続された構成とされている。
【0012】
地図データ記憶装置11は、本実施形態の車載ナビゲーション装置で扱われる地図データを記憶するものであり、DVD(Digital Versatile Disc)等の記録媒体を有している。地図データは、地図上の地点を示すノードデータと各ノード間を連結する道路を示すリンクデータとで構成される道路網データの他、名称データや施設に関するデータなど、地図を表示する上で必要な各種データから構成される。この地図データ記憶装置11に記憶されている地図データは、ナビゲーションECU13からの指令に基づいて適宜読み出されて、ナビゲーションECU13へと送られる。なお、地図データ記憶装置11の記録媒体としては、上述したDVD以外にも、CD(Compact Disc)やメモリカード、ハードディスク等の様々な仕様の記録媒体が採用可能である。また、車載ナビゲーション装置が無線通信等によるデータ通信機能を有している場合には、地図データの配信サービスを行うサービスセンタ等からの地図データを取得して、ナビゲーションECU13へと送る構成を採用してもよい。
【0013】
表示装置12は、ナビゲーションECU13による制御のもとで、自車位置マークを重畳した地図や経路情報、その他の詳細情報などの各種情報を、ナビゲーション画像として表示するものである。この表示装置12としては、例えば液晶ディスプレイやプロジェクタ装置等の車両に搭載可能な各種表示装置が適用可能である。
【0014】
GPS受信機14は、全地球測位システム(GPS:Global Positioning System)の衛星から送られるGPS信号を周期的に受信するものである。このGPS受信機14で受信されたGPS信号は、所定周期でナビゲーションECU13に送られ、ナビゲーションECU13での自車の絶対位置検出処理に用いられる。
【0015】
車輪速センサ15は、自車の車輪の回転速度を検出して車輪速パルスとして出力するものである。この車輪速センサ15から出力される車輪速パルスは、ナビゲーションECU13に随時送られ、ナビゲーションECU13での自車の走行距離検出処理に用いられる。
【0016】
ジャイロセンサ16は、自車の車体の回転角速度(ヨーレート)を検出するものである。このジャイロセンサ16の検出値は、ナビゲーションECU13に随時送られ、ナビゲーションECU13での自車の進行方位検出処理に用いられる。
【0017】
ナビゲーションECU13は、本実施形態の車載ナビゲーション装置における各種動作を統括的に制御するものであり、CPUやROM、RAMを備えたマイクロコンピュータを中心に、入出力バッファ回路やメモリ回路などから構成される。このナビゲーションECU13は、予めマイクロコンピュータのROMなどに記憶されたナビゲーション用のプログラムを実行してCPUで各種の演算処理を行うことで、本実施形態の車載ナビゲーション装置における各種動作制御を実現し、特に本発明に関わる部分として、図1に示すように、絶対位置検出部21、走行距離検出部22、進行方位検出部23、自車位置推定部24、走行軌跡算出部25、走行軌跡記憶部26、周回走行判定部27、マップマッチング部28、ナビゲーション画像作成部29の各機能を実現する。
【0018】
絶対位置検出部21は、GPS受信機14から所定周期で送られるGPS信号に基づいて、自車の絶対位置を検出する。
【0019】
走行距離検出部22は、車輪速センサ15から随時送られる車輪速パルスをカウントすることで、自車の走行距離を検出する。
【0020】
進行方位検出部23は、ジャイロセンサ16から随時送られる検出値を積分することで、自車の進行方位を検出する。
【0021】
自車位置推定部24は、通常は、絶対値検出部21での検出結果と、走行距離検出部22での検出結果と、進行方位検出部23での検出結果とに基づいて、自車位置を推定する。また、この自車位置推定部24は、GPS受信機11によるGPS信号の受信が途絶えて絶対位置検出部21が自車の絶対位置を検出できない状態にあり、且つ、マップマッチング部28がマッチングフリーの状態にあり、且つ、周回走行判定部27によって自車が周回走行を行っていると判定された場合には、詳細を後述する手法で、走行距離検出部22での検出結果と、走行軌跡記憶部26に記憶されている周回走行の走行軌跡とに基づいて、自車位置を推定する。
【0022】
走行軌跡算出部25は、自車位置推定部24で推定された自車位置を時間的に追跡して、自車の走行軌跡を算出する。
【0023】
走行軌跡記憶部26は、走行軌跡算出部25で算出された自車の走行軌跡を記憶する。
【0024】
周回走行判定部27は、走行軌跡算出部25で算出された自車の走行軌跡に基づいて、自車が周回走行を行っているかどうかを判定する。
【0025】
マップマッチング部28は、地図データ記憶装置11に記憶されている地図データを参照して、自車位置推定部24で推定された自車位置が地図の道路上にあるかどうかを確認し、推定された自車位置が道路上から外れていれば、最も確からしい道路上の位置に自車位置を修正するマップマッチング処理を行う。具体的には、このマップマッチング部28は、例えば、走行軌跡算出部25で算出された現在までの自車の走行軌跡を、地図データの道路網データと比較して、最も高い確率で形状が一致していると思われる地図上の道路を特定し、自車位置推定部24で推定された自車位置がこの道路上から外れた位置となっている場合に、自車位置をこの道路上の位置に自動修正する。
【0026】
ナビゲーション画像作成部29は、地図データ記憶装置11から読み出した地図データに基づいて地図画像を描画するとともに、自車位置推定部24で推定された自車位置またはマップマッチング部28によって修正された自車位置の情報を読み込んで、地図画像上に自車位置マークを重畳したナビゲーション画像を作成する。また、ナビゲーション画像作成部29は、車両の乗員によって図示しない入力装置を用いた操作入力があれば、それに応じて、例えば各種設定画面や探索画面、経路誘導画面などのナビゲーション画像を作成する。このナビゲーション画像作成部29により作成されたナビゲーション画像は、表示装置12に表示される。
【0027】
ここで、以上のように構成される本実施形態の車載ナビゲーション装置において、自車位置を推定する処理について、更に詳しく説明する。
【0028】
本実施形態の車載ナビゲーション装置においては、上述したように、GPS受信機14がGPS信号を受信可能な場合には、ナビゲーションECU13の自車位置推定部24が、絶対位置検出部21の検出結果と、走行距離検出部22の検出結果と、進行方位検出部23の検出結果とに基づいて、自車位置を推定する。ここで、マップマッチング部28でのマップマッチング処理が可能であれば、自車位置推定部24で推定した自車位置にずれが生じた場合に、マップマッチング部28でのマップマッチング処理によりこのずれを自動修正する。したがって、このような状況においては、自車位置を極めて精度良く推定することが可能である。
【0029】
一方、例えばトンネル内や屋内駐車場などの施設内では、GPS受信機14がGPS信号を受信できなくなる場合が多く、このようなGPS信号の受信ができない環境を自車が走行している場合には、ナビゲーションECU13の自車位置推定部24は、絶対位置検出部21の検出結果が得られないので、走行距離検出部22の検出結果と、進行方位検出部23の検出結果とに基づいて、自車位置を推定することになる。この場合も、マップマッチング部28でのマップマッチング処理が可能であれば、自車位置推定部24で推定した自車位置にずれが生じた場合に、マップマッチング部28でのマップマッチング処理によりこのずれを自動修正するので、自車位置を極めて精度良く推定することが可能である。
【0030】
しかしながら、自車が道路上でない施設内を走行する場合には、マップマッチング部28でのマップマッチング処理が行われないマッチングフリーの状態となるので、車輪速センサ15の検出値(走行距離検出部22の検出結果)やジャイロセンサ16の検出値(進行方位検出部23の検出結果)に誤差が生じて、自車位置推定部24で推定した自車位置にずれが生じた場合であっても、このずれを修正することができない。特に、屋内駐車場などでは、図2に示すように、螺旋状の走行路に沿って駐車スペースを配置した構造のものが多く、自車が螺旋状の走行路に沿って周回を繰り返すうちにジャイロセンサ16の誤差が蓄積されて、進行方位検出部23の検出結果に大きな誤差が生じ、自車位置推定部24で推定した自車位置が実際の位置から大きくずれてしまう場合がある。そして、例えば自車が屋内駐車場から外部に出たときに、自車位置マークが全く異なる位置に重畳されたナビゲーション画像を表示装置12に表示してしまい、車両の乗員に進行方向を誤らせる要因となるといった問題が生じる。
【0031】
そこで、本実施形態の車載ナビゲーション装置においては、GPS受信機14によるGPS信号の受信が途絶えた状況にあり、且つ、マップマッチング部28によるマップマッチング処理が行われない状況にあり、且つ、周回走行判定部27によって自車が周回走行を行っていると判定された場合に、ナビゲーションECU13の自車位置推定部24は、ジャイロセンサ16の累積誤差によって大きな誤差が発生することが予想される進行方位検出部23の検出結果を用いずに、走行軌跡記憶部26に記憶された周回走行の走行軌跡と、走行距離検出部23の検出結果とに基づいて、自車位置を推定するようにしている。なお、走行軌跡記憶部26に記憶された周回走行の走行軌跡は、走行軌跡算出部25が自車位置推定部24で推定された自車位置を時間的に追跡して求めたものであるため、進行方位検出部23の検出結果を反映したものであるが、周回走行の最初の1周におけるジャイロセンサ16の誤差はさほど大きくなく、周回走行の最初の1周の走行軌跡はある程度正確に算出できるので、本実施形態の車載ナビゲーション装置では、この周回走行の最初の1周の走行軌跡と、走行距離検出部23の検出結果とに基づいて、その後の周回走行を行っている間の自車位置を推定するようにしている。
【0032】
具体的には、ナビゲーションECU13の自車位置推定部24は、上述した3つの条件が揃ったときに、走行軌跡算出部25によって算出されて走行軌跡記憶部26に記憶された直前の周回走行の走行軌跡、例えば図3に示すような周回走行の走行軌跡Eを走行軌跡記憶部26から読み出す。そして、この走行軌跡Eから、周回走行の基点となる位置Xを特定するとともに、周回走行の1周の距離Aを求める。そして、走行距離検出部23の検出結果から、周回走行の基点となる位置Xから自車の現在位置までの走行距離Bを求め、この走行距離Bを1周の距離Aで除して余りの距離Cを求める。そして、周回走行の基点となる位置Xから周回走行の走行軌跡に沿って余り距離C分だけ移動した位置を、自車位置として推定する。
【0033】
なお、周回走行判定部27によって自車が周回走行を行っていると判定された後も、進行方位検出部23は、ジャイロセンサ16の検出値に基づく自車の進行方位の検出を継続して行っている。このときの進行方位検出部23の検出結果は、自車位置の推定処理には用いられないが、自車が周回走行の経路から外れたか否かの判定に用いられる。すなわち、自車が周回走行を繰り返している間は、進行方位検出部23の検出結果がおおよそ同じパターンで変化することになるが、例えば自車が屋内駐車場から外部に出たときなど、周回走行が終了したときには、進行方位検出部23の検出結果の変化のパターンが周回走行を繰り返していたときと大きく異なることになる。したがって、この進行方位検出部23の検出結果をモニタリングしておくことで、自車が周回走行の経路から外れ、例えば屋内駐車場から外部に出たといった状況を判定することが可能となる。
【0034】
図4は、本実施形態の車載ナビゲーション装置における自車位置を推定する処理の流れの一例を示すフローチャートである。この図4に示す処理フローは、本実施形態の車載ナビゲーション装置におけるナビゲーションECU13内部での処理として実行されるものであり、本実施形態の車載ナビゲーション装置の電源が投入されることにより開始される。
【0035】
この図4に示す処理フローが開始されると、先ず、ステップS1において、GPS受信機14がGPS信号を受信しているか否か、すなわち絶対位置検出部21によって自車の絶対位置の検出処理を行える状況にあるか否かが判定される。このステップS1での判定の結果、絶対位置検出部21による自車の絶対位置の検出処理が行える状況にあると判断されれば、自車位置推定部24が、次のステップS2において、絶対位置検出部21の検出結果と、走行距離検出部22の検出結果と、進行方位検出部23の検出結果とに基づいて、自車位置を推定する。そして、ステップS3において、マップマッチング部28によるマップマッチング処理が可能な状況にあるか否かが判定され、マップマッチング部28でのマップマッチング処理が可能であれば、ステップS4において、自車位置推定部24で推定した自車位置にずれが生じた場合に、マップマッチング部28でのマップマッチング処理によりこのずれを自動修正してナビゲーション画像作成部29に出力し、リターンする。一方、自車位置推定部24で推定した自車位置が道路上でなく、マップマッチング部28でのマップマッチング処理ができない、いわゆるマッチングフリーの状態であれば、自車位置推定部24で推定した自車位置をナビゲーション画像作成部29に出力してリターンする。
【0036】
また、ステップS1での判定の結果、GPS受信機14がGPS信号を受信しておらず、絶対位置検出部21が自車の絶対位置の検出処理を行えない状況にあると判断された場合には、自車位置推定部24は、ステップS5において、走行距離検出部22の検出結果と、進行方位検出部23の検出結果とに基づいて、自車位置を推定する。そして、ステップS6において、マップマッチング部28によるマップマッチング処理が可能な状況にあるか否かが判定され、マップマッチング部28でのマップマッチング処理が可能であれば、ステップS7において、自車位置推定部24で推定した自車位置にずれが生じた場合に、マップマッチング部28でのマップマッチング処理によりこのずれを自動修正してナビゲーション画像作成部29に出力し、リターンする。
【0037】
一方、自車位置推定部24で推定した自車位置が道路上でなく、マップマッチング部28でのマップマッチング処理ができないマッチングフリーの状態であれば、次のステップS8において、周回走行判定部27が、走行軌跡算出部25によって算出された自車の走行軌跡に基づいて、自車が周回走行を行っているか否かを判定する。ここで、自車が周回走行を行っていないと判定された場合には、自車位置推定部24が走行距離検出部22の検出結果と進行方位検出部23の検出結果とに基づいて推定した自車位置をナビゲーション画像作成部29に出力し、リターンする。
【0038】
一方、周回走行判定部27により自車が周回走行を行っていると判定された場合には、次のステップS9において、走行軌跡算出部25によって算出されて走行軌跡記憶部26に記憶された直前の周回走行の走行軌跡が、自車位置推定部24によって読み出される。そして、ステップS10において、自車位置推定部24が、ステップS10で読み出した周回走行の走行軌跡と、走行距離検出部22の検出結果とに基づいて、上述した手法により自車位置を推定し、推定した自車位置をナビゲーション画像作成部29に出力する。
【0039】
その後、自車位置推定部24は、例えば進行方位検出部23の検出結果をモニタリングすることで自車の周回走行が終了したか否かを判定し(ステップS11)、自車の周回走行が継続している間はステップS10での自車位置の推定を繰り返し、自車の周回走行が終了した段階で、リターンする。
【0040】
以上詳細に説明したように、本実施形態の車載ナビゲーション装置では、GPS受信機14によるGPS信号の受信が途絶えた状況にあり、且つ、マップマッチング部28によるマップマッチング処理が行われない状況にあり、且つ、周回走行判定部27によって自車が周回走行を行っていると判定された場合に、ナビゲーションECU13の自車位置推定部24が、走行軌跡記憶部26に記憶された周回走行の走行軌跡と、走行距離検出部23の検出結果とに基づいて、自車位置を推定するようにしている。
【0041】
したがって、この車載ナビゲーション装置においては、屋内駐車場などの施設内で自車が周回走行する場合に、周回走行による累積誤差が懸念されるジャイロセンサ16のセンサ出力に頼ることなく自車位置を推定することができ、精度のよい自車位置の推定が可能となる。
【0042】
また、この車載ナビゲーション装置においては、施設側の設備に依存することなく自車位置の推定が行われるので、施設側に設備投資などのコスト面で大きな負担を強いることもない。
【0043】
なお、以上説明した車載ナビゲーション装置は本発明の一適用例であり、本発明が以上の例に限定されるものではなく、本発明に係る技術的思想を逸脱しない範囲で種々の変更が可能であることは勿論である。例えば、上述した例では、車載ナビゲーション装置が、GPS信号を受信するGPS受信機14や、マップマッチング処理を行うマップマッチング部28を備えていることを前提として説明したが、本発明は、自車が周回走行を行っている場合に、周回走行の走行軌跡と自車の走行距離とに基づいて自車位置を推定することを基本思想としており、GPS信号に基づく絶対位置の検出を行わないナビゲーション装置や、マップマッチング処理を行わないナビゲーション装置に対しても有効に適用可能である。
【図面の簡単な説明】
【0044】
【図1】本発明を適用した車載ナビゲーション装置の概略構成を示すブロック図である。
【図2】屋内駐車場の構造を模式的に示す図である。
【図3】本発明を適用した車載ナビゲーション装置において、自車の周回走行の走行軌跡と走行距離検出部の検出結果とに基づいて自車位置を推定する手法を説明する図である。
【図4】本発明を適用した車載ナビゲーション装置において、自車位置を推定する処理の流れの一例を示すフローチャートである。
【符号の説明】
【0045】
13 ナビゲーションECU
14 GPS受信機
15 車輪速センサ
16 ジャイロセンサ
21 絶対位置検出部
22 走行距離検出部
23 進行方位検出部
24 自車位置推定部
25 走行軌跡算出部
26 走行軌跡記憶部
27 周回走行判定部
28 マップマッチング部
29 ナビゲーション画像作成部
【特許請求の範囲】
【請求項1】
自車の進行方位を検出する進行方位検出手段と、
自車の走行距離を検出する走行距離検出手段と、
自車の走行軌跡を算出する走行軌跡算出手段と、
前記走行軌跡算出手段によって算出された自車の走行軌跡を記憶する走行軌跡記憶手段と、
前記走行軌跡算出手段によって算出された自車の走行軌跡に基づいて自車が周回走行を行っているかどうかを判定する周回走行判定手段と、
前記周回走行判定手段により自車が周回走行を行っていると判定されたときに、前記走行軌跡記憶手段に記憶されている周回走行の走行軌跡と前記走行距離算出手段の検出値とに基づいて自車位置を推定する自車位置推定手段とを備えることを特徴とする車載ナビゲーション装置。
【請求項2】
車両外部から発信された自車位置を推定するため信号を受信する信号受信手段を更に備え、
前記自車位置推定手段は、前記信号受信手段による信号の受信が途絶え、且つ、前記周回走行判定手段により自車が周回走行を行っていると判定されたときに、前記走行軌跡記憶手段に記憶されている周回走行の走行軌跡と前記走行距離算出手段の検出値とに基づいて自車位置を推定することを特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項3】
地図データを参照して自車位置を道路上にマッチングするマップマッチング手段を更に備え、
前記自車位置推定手段は、前記マップマッチング手段によるマッチング処理が行われず、且つ、前記周回走行判定手段により自車が周回走行を行っていると判定されたときに、前記走行軌跡記憶手段に記憶されている周回走行の走行軌跡と前記走行距離算出手段の検出値とに基づいて自車位置を推定することを特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項4】
車両外部から発信された自車位置を推定するため信号を受信する信号受信手段と、
地図データを参照して自車位置を道路上にマッチングするマップマッチング手段とを更に備え、
前記自車位置推定手段は、前記信号受信手段による信号の受信が途絶え、且つ、前記マップマッチング手段によるマッチング処理が行われず、且つ、前記周回走行判定手段により自車が周回走行を行っていると判定されたときに、前記走行軌跡記憶手段に記憶されている周回走行の走行軌跡と前記走行距離算出手段の検出値とに基づいて自車位置を推定することを特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項5】
車載ナビゲーション装置の自車位置推定方法であって、
自車の走行軌跡を算出して記憶するとともに、自車の走行軌跡に基づいて自車が周回走行を行っているかどうかを判定し、自車が周回走行を行っていると判定したときに、周回走行の走行軌跡と自車の走行距離とに基づいて自車位置を推定することを特徴とする自車位置推定方法。
【請求項1】
自車の進行方位を検出する進行方位検出手段と、
自車の走行距離を検出する走行距離検出手段と、
自車の走行軌跡を算出する走行軌跡算出手段と、
前記走行軌跡算出手段によって算出された自車の走行軌跡を記憶する走行軌跡記憶手段と、
前記走行軌跡算出手段によって算出された自車の走行軌跡に基づいて自車が周回走行を行っているかどうかを判定する周回走行判定手段と、
前記周回走行判定手段により自車が周回走行を行っていると判定されたときに、前記走行軌跡記憶手段に記憶されている周回走行の走行軌跡と前記走行距離算出手段の検出値とに基づいて自車位置を推定する自車位置推定手段とを備えることを特徴とする車載ナビゲーション装置。
【請求項2】
車両外部から発信された自車位置を推定するため信号を受信する信号受信手段を更に備え、
前記自車位置推定手段は、前記信号受信手段による信号の受信が途絶え、且つ、前記周回走行判定手段により自車が周回走行を行っていると判定されたときに、前記走行軌跡記憶手段に記憶されている周回走行の走行軌跡と前記走行距離算出手段の検出値とに基づいて自車位置を推定することを特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項3】
地図データを参照して自車位置を道路上にマッチングするマップマッチング手段を更に備え、
前記自車位置推定手段は、前記マップマッチング手段によるマッチング処理が行われず、且つ、前記周回走行判定手段により自車が周回走行を行っていると判定されたときに、前記走行軌跡記憶手段に記憶されている周回走行の走行軌跡と前記走行距離算出手段の検出値とに基づいて自車位置を推定することを特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項4】
車両外部から発信された自車位置を推定するため信号を受信する信号受信手段と、
地図データを参照して自車位置を道路上にマッチングするマップマッチング手段とを更に備え、
前記自車位置推定手段は、前記信号受信手段による信号の受信が途絶え、且つ、前記マップマッチング手段によるマッチング処理が行われず、且つ、前記周回走行判定手段により自車が周回走行を行っていると判定されたときに、前記走行軌跡記憶手段に記憶されている周回走行の走行軌跡と前記走行距離算出手段の検出値とに基づいて自車位置を推定することを特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項5】
車載ナビゲーション装置の自車位置推定方法であって、
自車の走行軌跡を算出して記憶するとともに、自車の走行軌跡に基づいて自車が周回走行を行っているかどうかを判定し、自車が周回走行を行っていると判定したときに、周回走行の走行軌跡と自車の走行距離とに基づいて自車位置を推定することを特徴とする自車位置推定方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2006−349422(P2006−349422A)
【公開日】平成18年12月28日(2006.12.28)
【国際特許分類】
【出願番号】特願2005−174142(P2005−174142)
【出願日】平成17年6月14日(2005.6.14)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成18年12月28日(2006.12.28)
【国際特許分類】
【出願日】平成17年6月14日(2005.6.14)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]