
車載用ナビゲーション装置

【課題】マップマッチングの精度を向上させることが可能な車載用ナビゲーション装置を提供する。
【解決手段】道路の地物を撮影し画像信号を出力するカメラ180と、画像信号から、特徴的な地物が存在する位置を表す情報である特徴点を抽出する特徴点抽出部113と、自車両の現在地を検出する現在地検出装置170と、現在地検出装置170により異なる時間にそれぞれ検出された複数の現在地を、自車両の走行軌跡として記録する走行軌跡記録部114と、特徴点により表される位置に基づいて、当該特徴点を走行軌跡に含まれるいずれかの地点に関連付けて記録する特徴点記録部115と、を備える車載用ナビゲーション装置100。
【解決手段】道路の地物を撮影し画像信号を出力するカメラ180と、画像信号から、特徴的な地物が存在する位置を表す情報である特徴点を抽出する特徴点抽出部113と、自車両の現在地を検出する現在地検出装置170と、現在地検出装置170により異なる時間にそれぞれ検出された複数の現在地を、自車両の走行軌跡として記録する走行軌跡記録部114と、特徴点により表される位置に基づいて、当該特徴点を走行軌跡に含まれるいずれかの地点に関連付けて記録する特徴点記録部115と、を備える車載用ナビゲーション装置100。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置に関する。
【背景技術】
【0002】
従来、車載用ナビゲーション装置では、自車位置の検出結果を道路位置に合わせて補正するマップマッチングと呼ばれる手法により、自車両の現在地を決定する。これにより、地図上での自車両の位置が道路から外れた位置となることを防ぎ、ユーザに違和感を与えることを防止することが可能である。例えば特許文献1には、マップマッチングの候補となる道路が複数ある場合に、道路の撮影画像による白線の検出結果を用いて、マップマッチングの対象とする道路を決定する車載ナビゲーション装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−345240号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されているような従来のマップマッチングでは、正しい道路にマッチングさせることが難しい場合がある。
【課題を解決するための手段】
【0005】
請求項1に係る発明は、道路の地物を撮影し画像信号を出力する撮像手段と、画像信号から、特徴的な地物が存在する位置を表す情報である特徴点を抽出する特徴点抽出手段と、自車両の現在地を検出する現在地検出手段と、現在地検出手段により異なる時間にそれぞれ検出された複数の現在地を、自車両の走行軌跡として記録する走行軌跡記録手段と、特徴点により表される位置に基づいて、当該特徴点を走行軌跡に含まれるいずれかの地点に関連付けて記録する特徴点記録手段と、を備えることを特徴とする車載用ナビゲーション装置である。
【発明の効果】
【0006】
本発明によれば、マップマッチングの精度を向上させることができる。
【図面の簡単な説明】
【0007】
【図1】本発明の第1の実施の形態に係る車載用ナビゲーション装置の全体構成を示すブロック図である。
【図2】カメラ180の詳細を示す模式図である。
【図3】特徴点抽出部113によるパターンマッチング処理の詳細を示す図である。
【図4】特徴点抽出部113、走行軌跡記録部114、および特徴点記録部115の動作を説明するための模式図である。
【図5】走行経路の記録処理のフローチャートである。
【発明を実施するための形態】
【0008】
(第1の実施の形態)
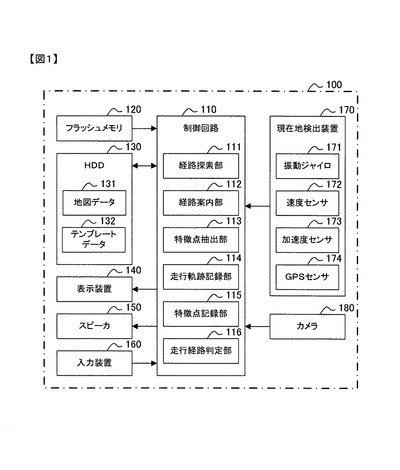
図1は、本発明の第1の実施の形態に係る車載用ナビゲーション装置の全体構成を示すブロック図である。車載用ナビゲーション装置100(以下、ナビゲーション装置100と呼ぶことがある)は車両に搭載される車載型の装置である。以下の説明では、ナビゲーション装置100が搭載されている車両を自車両と呼ぶ。ナビゲーション装置100は、自車両が目的地に到達するための経路を探索する経路探索機能、および、自車両を当該経路に従って案内する経路案内機能を有する。
【0009】
ナビゲーション装置100は、CPU、主記憶装置、周辺回路等を含む制御回路110を備える。制御回路110には不揮発性の記憶媒体であるフラッシュメモリ120が接続されている。制御回路110は、フラッシュメモリ120に格納された所定の制御プログラムを読み込んで実行することにより、ナビゲーション装置100を構成する各部の制御処理と、後述する経路探索処理および経路案内処理とを行う。
【0010】
制御回路110には、大容量の固定記憶装置であるハードディスクドライブ(HDD)130が接続されている。HDD130には、地図データ131とテンプレートデータ132とが格納されている。これらのデータについては後に詳述する。
【0011】
制御回路110には現在地検出装置170が接続されている。現在地検出装置170は自車両の現在地を検出し、制御回路110に出力する装置である。現在地検出装置170は、振動ジャイロ171、速度センサ172、加速度センサ173、およびGPS(Global Positioning System)センサ174を備える。振動ジャイロ171は自車両の角速度を検出する。速度センサ172は自車両の速度を検出する。加速度センサ173は自車両の加速度を検出する。GPSセンサ174はGPS衛星から送出されるGPS信号を検出する。現在地検出装置170はこれらのセンサにより検知された各情報から、周知の方法により自車両の現在地を検出して制御回路110へ出力する。
【0012】
ナビゲーション装置100は、表示装置140とスピーカ150とを備える。表示装置140は例えば液晶ディスプレイ等であり、制御回路110が出力する画像信号に基づいて、画面に画像や文字列を表示する。スピーカ150は制御回路110が出力する音声信号に基づいて、ユーザに対し音声を流す。ナビゲーション装置100には更に、タッチパネル等の入力装置160が設けられており、ユーザによる操作に応じて制御回路110に操作信号が入力されるようになっている。
【0013】
制御回路110には、自車両の前方を撮影するカメラ180が接続されている。カメラ180は、自車両の前方の路面を撮影し画像信号を出力する。この画像信号は、後述する特徴点抽出処理に用いられる。
【0014】
制御回路110は、経路探索部111、経路案内部112、特徴点抽出部113、走行軌跡記録部114、特徴点記録部115、および走行経路判定部116を備える。これらの各機能部は、制御回路110がフラッシュメモリ120に格納された制御プログラムを実行することにより、ソフトウェア的に実現される。これらの各機能部については後に説明する。
【0015】
(地図データ131の説明)
地図データ131は、地図表示用データ、経路探索用データなどを含む。地図表示用データおよび経路探索用データには、地図データに格納されている道路のリンク情報およびノード情報が含まれている。リンク情報には、各リンクが表す道路の道路形状に関する情報と、各リンクの旅行時間(以下、リンク旅行時間)の情報とが含まれている。ノード情報には、各ノードが交差点に対応するか否かを表す情報が含まれている。地図表示用データは、広域から詳細まで複数の縮尺の地図データを有している。制御回路110は表示装置140に地図を表示する際、ユーザの要求に従って、表示地図の縮尺を変更することが可能である。
【0016】
(テンプレートデータ132の説明)
テンプレートデータ132は、カメラ180から出力される画像信号とのパターンマッチングに用いられるデータである。後述する特徴点抽出部113は、カメラ180が撮影した前方の路面の画像から、自車両の前方に交差点が存在することを検出するが、これはテンプレートデータ132を用いたパターンマッチングにより実現される。すなわち、テンプレートデータ132は交差点に特有の区画線等を検出するためのデータである。
【0017】
(経路探索部111の説明)
経路探索部111は、自車両の現在地からユーザにより設定された目的地までの最適な経路を探索する処理である、経路探索処理を実行する。目的地がユーザにより設定されると、経路探索部111は現在地検出装置170により検出された現在地を出発地として目的地までの経路演算を所定のアルゴリズムに基づいて行う。例えば、出発地から目的地までの間の旅行時間(リンク旅行時間の合計)が最小になるような経路を演算するアルゴリズムで経路演算が行われる。以上の経路探索処理により求められた経路(以下、推奨経路という)は、表示形態、たとえば表示色などを変えることによって、他の道路とは区別して画面に表示される。これにより、ユーザは推奨経路を地図画面上で認識することができる。
【0018】
(経路案内部112の説明)
経路案内部112は経路案内処理を実行する。経路案内処理とは、自車両の運転者が経路探索部111により探索された推奨経路に従って自車両を走行させられるように、運転者に対して表示装置140の画面やスピーカ150による音声などにより進行方向指示を行い、車両を経路誘導する処理である。
【0019】
経路案内処理の実行中、経路案内部112は表示装置140の画面に、自車両の周辺地域の地図を表示する。そして、地図上に、自車両の向きおよび現在地を表すマークを表示する。本実施形態では、このマークは三角形である。以下、このマークを自車位置マークと呼ぶ。
【0020】
経路案内処理を行うためには自車両の現在地が必要となる。本実施形態の経路案内部112は、現在地検出装置170により検出された現在地に、いわゆるマップマッチング処理を施して得られた位置を、自車両の現在地として扱う。マップマッチング処理とは、自車両の現在地を適切なリンク上の位置に補正する処理である。つまり、経路案内部112は、現在地検出装置170により検出された位置そのものではなく、現在地に対応付けられたリンク上の位置を自車両の現在地として扱う。経路案内部112は、マップマッチング処理を行い補正した現在地に基づいて、画面に自車位置マークを表示したり、経路誘導を行ったりする。
【0021】
本実施形態の経路案内部112は、走行経路判定部116に自車両が走行した経路を判定させる。そして、自車両が走行したと判定された経路に基づきマップマッチングを行う。以下、走行経路判定部116が行う走行経路の判定処理について説明する。
【0022】
(走行経路の判定処理の説明)
走行経路判定部116は、走行経路の判定処理に、特徴点抽出部113、走行軌跡記録部114、および特徴点記録部115を用いる。特徴点抽出部113は、テンプレートデータ132を用いた周知のパターンマッチング処理により、カメラ180が出力する画像信号から交差点の位置を表す情報である特徴点を抽出する。
【0023】
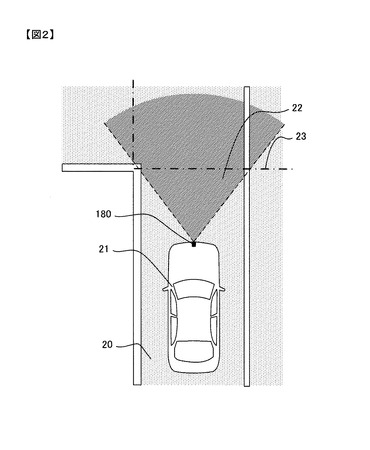
図2は、カメラ180の詳細を示す模式図である。図2には、道路20を走行中の自車両21が示されている。カメラ180は自車両21の前方の路面を撮像可能なように、自車両21の前面に設置されている。カメラ180の撮影範囲22は、自車両21の前方に存在する交差点が含まれるように設定される。
【0024】
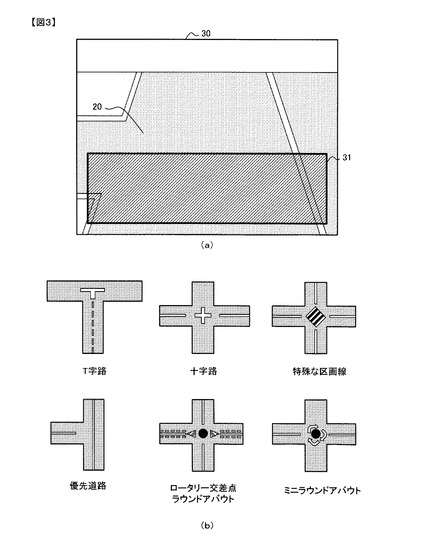
図3は、特徴点抽出部113によるパターンマッチング処理の詳細を示す図である。図3(a)は、道路20においてカメラ180が出力した撮影画像30の一例を示している。特徴点抽出部113は、撮影画像30の全体のうち下部に位置する所定範囲のウィンドウ31に対し、テンプレートデータ132を用いたパターンマッチング処理を実行する。このパターンマッチング処理により、自車両から所定距離(例えば5m)だけ前方に交差点が存在することが検知される。つまり、交差点の位置は自車両の現在地と上記の所定距離とから算出可能である。特徴点抽出部113は、交差点の存在を検知すると、当該交差点の位置を表す情報である特徴点を出力する。
【0025】
テンプレートデータ132により検知される、交差点に特有の区画線等の例を図3(b)に示す。テンプレートデータ132は、図3(b)に示す区画線等を検出可能に構成される。また、図3(a)に示したウィンドウ31は、これらの区画線等を検出可能な範囲に定められる。
【0026】
特徴点抽出部113は上述のパターンマッチング処理により特徴点を抽出すると、抽出した特徴点を主記憶装置(不図示)に一時的に記録する。以下の説明では、この一時的に記憶された特徴点を、一時特徴点と呼ぶ。
【0027】
走行軌跡記録部114は、現在地検出装置170により検出された複数の現在地を、自車両の走行軌跡として、不図示の主記憶装置へ時系列順に記録する。具体的には、自車両が所定距離(例えば1メートル)走行するたびに、その時点で現在地検出装置170により検出されている最新の現在地を主記憶装置に記録する。これにより、これまでに自車両が走行してきた軌跡が、主記憶装置に記録される。
【0028】
特徴点記録部115は、主記憶装置に一時特徴点が記録されている場合、走行軌跡記録部114により現在地が記録される度に、当該現在地と一時特徴点との間の距離を演算する。そして、主記憶装置に記録される現在地のうち当該距離が最も短い現在地に関連付けて、特徴点を記録する。つまり、特徴点記録部115によって一時特徴点は正式に主記憶装置に記録される。
【0029】
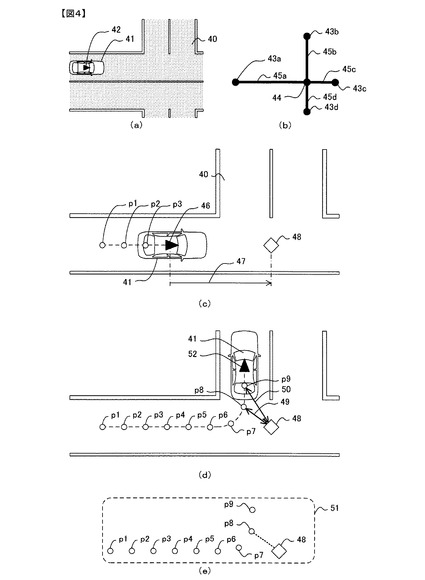
図4は、特徴点抽出部113、走行軌跡記録部114、および特徴点記録部115の動作を説明するための模式図である。図4(a)には、ある時刻t0において、道路40を走行中の自車両41が交差点に向かって走行している様子が示されている。このとき、現在地検出装置170は黒く塗りつぶされた三角形42で表す位置を、現在地として検出する。
【0030】
図4(b)は、図4(a)に示す道路40のノード情報およびリンク情報を模式的に示した図である。図4(a)に示す道路40は、5つのノード(43a〜43d、44)および各ノードを接続する4つのリンク(45a〜45d)により構成されている。これらのノードのうち、ノード44のノード情報には、当該ノードが交差点を表すノードであるという情報が含まれている。すなわち、地図データ131には、ノード44が特徴点抽出部113により抽出される特徴点に対応する地点であることを表す情報が含まれている。
【0031】
図4(c)は、図4(a)に対応する時刻t0から一定時間が経過した時刻t1における自車両41の様子を示す図である。図4(c)中に白抜きの丸で示した点p1〜p3は、それぞれ走行軌跡記録部114により記録された走行軌跡の各地点を表している。自車両41が図4(c)に示す現在地46に到達したとき、特徴点抽出部113により前方に交差点が存在することが検知されたものとする。このとき特徴点抽出部113は、自車両41の現在地46から所定距離47だけ前方の位置(図4(c)において白抜きの菱形48で表す位置)を交差点の位置であると判断する。そして、この交差点の位置を表す情報を特徴点として抽出する。抽出された特徴点は、主記憶装置(不図示)に一時的に記録される。すなわち、主記憶装置に一時特徴点が記録される。
【0032】
図4(d)は、図4(c)に対応する時刻t1から更に一定時間が経過した時刻t2における自車両41の様子を示す図である。図4(d)では、図4(c)から更に点p4〜p9で表す各地点が、走行軌跡記録部114により主記憶装置に記録されている。主記憶装置に一時特徴点が存在する場合、走行軌跡記録部114により現在地が記録される度に、特徴点記録部115が一時特徴点と現在地との間の距離を演算する。すなわち、特徴点記録部115は、点p4と一時特徴点48との間の距離や、点p5と一時特徴点48との間の距離を演算する。そして、直前に演算された距離に比べて最新の距離が大きい場合、すなわち一時特徴点48から自車両が遠ざかった場合に、直前に記録された現在地に関連付けて特徴点48を記録する。このとき、特徴点48は最早一時特徴点ではなく、言わば正式に特徴点として主記憶装置に記録される。
【0033】
例えば図4(d)において、点p8と一時特徴点48との間の距離49よりも、その後に演算される点p9と一時特徴点48との間の距離50の方が大きい。特徴点記録部115は、距離50を演算した時点で、一時特徴点48を特徴点として点p8で表される位置に関連付けて主記憶装置に記憶する。
【0034】
図4(e)は、最終的に主記憶装置に記録される走行軌跡51を示す図である。このように、主記憶装置には点p1〜p9で表される各地点から成る走行軌跡51が記録される。また、点p8で表される地点には、特徴点48が関連付けて記録されている。走行経路判定部116は、このようにして記録された走行軌跡51を、自車両41の付近のリンクおよびノード(例えば図4(b)に示すリンクおよびノード)と比較することにより、自車両41が走行した経路を判定する。具体的には、走行軌跡51の形状および各地点に対応する特徴点48をリンク情報およびノード情報と比較する。
【0035】
経路案内部112はマップマッチングを所定のタイミングで実行する。例えば、図4(c)に示す時刻t1においてマップマッチングが実行された場合、走行経路判定部116はその時点において主記憶装置に記録されている点p1、p2、p3から成る走行軌跡を用いて走行経路の判定を行う。具体的には、まず周知の手法によりこの走行軌跡と図4(b)に示すリンク形状とを比較する。そして、この比較により走行経路をただ1つに絞りきれない場合に、特徴点を用いて候補となる走行経路を絞り込む。図4(c)に示す時刻t1の状態では、十分な走行軌跡が記録されていないため、マップマッチングを正しく行えない可能性がある。しかしながら、その後、例えば図4(d)に示す時刻t2において経路案内部112により再度マップマッチングが実行されれば、特徴点48を含む十分な長さの走行軌跡51が主記憶装置に記憶されているので、マップマッチングを正しく行うことが期待できる。
【0036】
なお、記録された走行軌跡51は、走行経路判定部116が走行経路の判定に用いるのみならず、経路案内部112により表示装置140の画面に、地図に重ねて表示される。これは、ユーザがこれまでにどのような経路を走行してきたかを把握しやすいようにするための表示である。この表示では、例えば図4(d)に模式的に示したように、走行軌跡51と共に特徴点48が表示される。
【0037】
走行経路判定部116により行われる判定では、ノード44が交差点すなわち特徴点に対応する地点であることが重要となる。例えば図4(b)に示すリンクおよびノードと、図4(e)に示す走行軌跡51とを比較する場合、点p8で示す地点が特徴点48に関連付けられていることから、走行経路判定部116は、点p8と特徴点に対応するノードとをマッチングさせようとする。図4(b)に示すノードのうち特徴点に対応するノードはノード44のみであるので、点p8がノード44にマッチングすることは明らかである。このように、走行経路の判定に特徴点に関する情報を用いることにより、走行経路の判定の錯誤を抑止することが可能となる。
【0038】
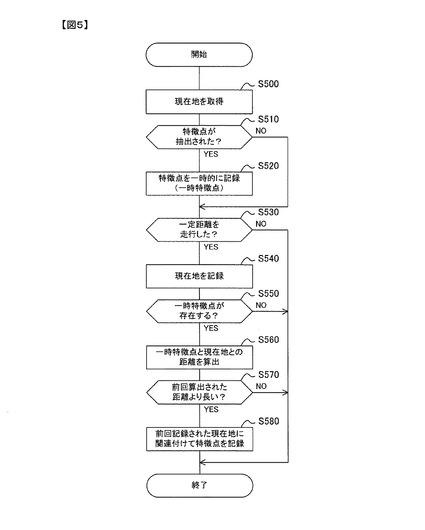
図5は、走行経路の記録処理のフローチャートである。図5に示す処理は、制御回路110がフラッシュメモリ120から読み込んだ所定の制御プログラムを実行することにより、ソフトウェア的に実現される。制御回路110は、自車両の経路誘導中に、図5に示す処理を繰り返し実行する。
【0039】
まずステップS500では、現在地検出装置170が自車両の現在地を取得する。ステップS510では、特徴点抽出部113が、カメラ180により撮影された撮影画像から特徴点を抽出したか否かを判定する。特徴点が抽出された場合には肯定判定がなされ、処理はステップS520に進む。ステップS520では、特徴点抽出部113がステップS510で抽出した特徴点を一時特徴点として主記憶装置に記録する。他方、ステップS510において否定判定がなされた場合にはステップS530に進む。
【0040】
ステップS530では、走行軌跡記録部114が、走行軌跡を前回記録してから自車両が所定距離(例えば1メートル)を走行したか否かを判定する。自車両の走行距離が所定距離未満であった場合には否定判定がなされ、本処理は終了する。他方、自車両が所定距離を走行していた場合には肯定判定がなされ、ステップS540に進む。ステップS540では、走行軌跡記録部114がステップS500において取得された現在地を主記憶装置に記録する。
【0041】
ステップS550では、特徴点記録部115が、主記憶装置に一時特徴点が記録されているか否かを判定する。一時特徴点が記録されていない場合には否定判定がなされ、本処理は終了する。他方、ステップS550において肯定判定がなされた場合にはステップS560に進む。ステップS560では、特徴点記録部115が、ステップS500において取得された現在地から一時特徴点までの距離を算出する。
【0042】
ステップS570では、特徴点記録部115が、ステップS560において算出された距離が前回算出された距離よりも長いか否か、すなわち、自車両が一時特徴点から遠ざかったか否かを判定する。直近の距離が前回算出された距離以下であった場合には否定判定がなされ、本処理は終了する。他方、ステップS570において肯定判定がなされた場合にはステップS580に進む。ステップS580では、特徴点記録部115が、走行軌跡記録部114により前回記録された現在地に関連付けて、一時特徴点を特徴点として主記憶装置に記録する。
【0043】
上述した第1の実施の形態による車載用ナビゲーション装置によれば、次の作用効果が得られる。
(1)特徴点抽出部113は、カメラ180が道路の地物を撮影した撮影画像から、特徴的な地物が存在する位置を表す情報である特徴点を抽出する。特徴点記録部115は、走行軌跡記録部114により記録された走行軌跡に含まれる各地点のうち、いずれかの地点に関連付けて、特徴点抽出部113により抽出された特徴点を記録する。このようにしたので、マップマッチングの精度を向上させることができる。
【0044】
(2)地図データ131のノード情報には、交差点すなわち特徴点に対応するノードであることを表す情報が含まれる。走行経路判定部116は走行軌跡記録部114により記録された走行軌跡の形状および特徴点記録部115により記録された特徴点と、地図データ131のリンク情報およびノード情報と、を比較することにより、自車両が走行した経路を判定する。このようにしたので、単純な走行軌跡の形状比較に比べて精度の向上および計算量の削減が可能となる。
【0045】
(3)特徴点抽出部113は、交差点の位置を表す情報を、テンプレートデータ132とカメラ180の撮影画像とのパターンマッチングにより抽出する。このようにしたので、交差点に接近したときに交差点の位置を確実に検出することが可能となる。
【0046】
(4)経路案内部112は、走行軌跡と、走行軌跡に含まれる地点に関連付けて記録された特徴点と、を共に表示する。このようにしたので、ユーザが過去の走行経路を認識することが容易になる。
【0047】
次のような変形も本発明の範囲内であり、変形例の一つ、もしくは複数を上述の実施形態と組み合わせることも可能である。
【0048】
(変形例1)
地図データ131およびテンプレートデータ132は、HDD130以外の記憶手段に記憶させてもよい。例えばDVD−ROM等の記憶媒体を用いてもよいし、ナビゲーション装置100の外部から無線通信により地図データ131およびテンプレートデータ132を受信するようにしてもよい。
【0049】
(変形例2)
現在地の検出を、第1の実施の形態における現在地検出装置170以外の装置により行ってもよい。例えば、衛星を利用した測位システムのみで現在地を検出するようにしてもよい。
【0050】
(変形例3)
交差点以外の特徴的な地物の位置を表す情報を特徴点としてもよい。例えば、路面や路側に設置されたマーカーやビーコン等の位置が、特徴点として抽出されるようにしてもよい。この場合、地図データ131に含まれるノード情報にも、これらの特徴点に対応するノードであるという情報が含まれることとなる。
【0051】
(変形例4)
走行経路判定部116による判定がなされた後、主記憶装置に記録されている走行軌跡は速やかに削除されるようにしてもよいし、一定の基準で主記憶装置に蓄積されるようにしてもよい。主記憶装置に走行軌跡が蓄積される場合には、走行経路判定部116は主記憶装置に蓄積された一連の走行軌跡に基づき走行経路の判定を行うことができるので、追加の記憶容量および演算時間が必要となる一方で、走行経路判定の精度をより向上させることが可能である。
【0052】
本発明の特徴を損なわない限り、本発明は上記実施の形態に限定されるものではなく、本発明の技術的思想の範囲内で考えられるその他の形態についても、本発明の範囲内に含まれる。
【符号の説明】
【0053】
100…車載用ナビゲーション装置、110…制御回路、111…経路探索部、112…経路案内部、113…特徴点抽出部、114…走行軌跡記録部、115…特徴点記録部、116…走行経路判定部、120…フラッシュメモリ、130…ハードディスクドライブ(HDD)、170…現在地検出装置、180…カメラ
【技術分野】
【0001】
本発明は、車載用ナビゲーション装置に関する。
【背景技術】
【0002】
従来、車載用ナビゲーション装置では、自車位置の検出結果を道路位置に合わせて補正するマップマッチングと呼ばれる手法により、自車両の現在地を決定する。これにより、地図上での自車両の位置が道路から外れた位置となることを防ぎ、ユーザに違和感を与えることを防止することが可能である。例えば特許文献1には、マップマッチングの候補となる道路が複数ある場合に、道路の撮影画像による白線の検出結果を用いて、マップマッチングの対象とする道路を決定する車載ナビゲーション装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−345240号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されているような従来のマップマッチングでは、正しい道路にマッチングさせることが難しい場合がある。
【課題を解決するための手段】
【0005】
請求項1に係る発明は、道路の地物を撮影し画像信号を出力する撮像手段と、画像信号から、特徴的な地物が存在する位置を表す情報である特徴点を抽出する特徴点抽出手段と、自車両の現在地を検出する現在地検出手段と、現在地検出手段により異なる時間にそれぞれ検出された複数の現在地を、自車両の走行軌跡として記録する走行軌跡記録手段と、特徴点により表される位置に基づいて、当該特徴点を走行軌跡に含まれるいずれかの地点に関連付けて記録する特徴点記録手段と、を備えることを特徴とする車載用ナビゲーション装置である。
【発明の効果】
【0006】
本発明によれば、マップマッチングの精度を向上させることができる。
【図面の簡単な説明】
【0007】
【図1】本発明の第1の実施の形態に係る車載用ナビゲーション装置の全体構成を示すブロック図である。
【図2】カメラ180の詳細を示す模式図である。
【図3】特徴点抽出部113によるパターンマッチング処理の詳細を示す図である。
【図4】特徴点抽出部113、走行軌跡記録部114、および特徴点記録部115の動作を説明するための模式図である。
【図5】走行経路の記録処理のフローチャートである。
【発明を実施するための形態】
【0008】
(第1の実施の形態)
図1は、本発明の第1の実施の形態に係る車載用ナビゲーション装置の全体構成を示すブロック図である。車載用ナビゲーション装置100(以下、ナビゲーション装置100と呼ぶことがある)は車両に搭載される車載型の装置である。以下の説明では、ナビゲーション装置100が搭載されている車両を自車両と呼ぶ。ナビゲーション装置100は、自車両が目的地に到達するための経路を探索する経路探索機能、および、自車両を当該経路に従って案内する経路案内機能を有する。
【0009】
ナビゲーション装置100は、CPU、主記憶装置、周辺回路等を含む制御回路110を備える。制御回路110には不揮発性の記憶媒体であるフラッシュメモリ120が接続されている。制御回路110は、フラッシュメモリ120に格納された所定の制御プログラムを読み込んで実行することにより、ナビゲーション装置100を構成する各部の制御処理と、後述する経路探索処理および経路案内処理とを行う。
【0010】
制御回路110には、大容量の固定記憶装置であるハードディスクドライブ(HDD)130が接続されている。HDD130には、地図データ131とテンプレートデータ132とが格納されている。これらのデータについては後に詳述する。
【0011】
制御回路110には現在地検出装置170が接続されている。現在地検出装置170は自車両の現在地を検出し、制御回路110に出力する装置である。現在地検出装置170は、振動ジャイロ171、速度センサ172、加速度センサ173、およびGPS(Global Positioning System)センサ174を備える。振動ジャイロ171は自車両の角速度を検出する。速度センサ172は自車両の速度を検出する。加速度センサ173は自車両の加速度を検出する。GPSセンサ174はGPS衛星から送出されるGPS信号を検出する。現在地検出装置170はこれらのセンサにより検知された各情報から、周知の方法により自車両の現在地を検出して制御回路110へ出力する。
【0012】
ナビゲーション装置100は、表示装置140とスピーカ150とを備える。表示装置140は例えば液晶ディスプレイ等であり、制御回路110が出力する画像信号に基づいて、画面に画像や文字列を表示する。スピーカ150は制御回路110が出力する音声信号に基づいて、ユーザに対し音声を流す。ナビゲーション装置100には更に、タッチパネル等の入力装置160が設けられており、ユーザによる操作に応じて制御回路110に操作信号が入力されるようになっている。
【0013】
制御回路110には、自車両の前方を撮影するカメラ180が接続されている。カメラ180は、自車両の前方の路面を撮影し画像信号を出力する。この画像信号は、後述する特徴点抽出処理に用いられる。
【0014】
制御回路110は、経路探索部111、経路案内部112、特徴点抽出部113、走行軌跡記録部114、特徴点記録部115、および走行経路判定部116を備える。これらの各機能部は、制御回路110がフラッシュメモリ120に格納された制御プログラムを実行することにより、ソフトウェア的に実現される。これらの各機能部については後に説明する。
【0015】
(地図データ131の説明)
地図データ131は、地図表示用データ、経路探索用データなどを含む。地図表示用データおよび経路探索用データには、地図データに格納されている道路のリンク情報およびノード情報が含まれている。リンク情報には、各リンクが表す道路の道路形状に関する情報と、各リンクの旅行時間(以下、リンク旅行時間)の情報とが含まれている。ノード情報には、各ノードが交差点に対応するか否かを表す情報が含まれている。地図表示用データは、広域から詳細まで複数の縮尺の地図データを有している。制御回路110は表示装置140に地図を表示する際、ユーザの要求に従って、表示地図の縮尺を変更することが可能である。
【0016】
(テンプレートデータ132の説明)
テンプレートデータ132は、カメラ180から出力される画像信号とのパターンマッチングに用いられるデータである。後述する特徴点抽出部113は、カメラ180が撮影した前方の路面の画像から、自車両の前方に交差点が存在することを検出するが、これはテンプレートデータ132を用いたパターンマッチングにより実現される。すなわち、テンプレートデータ132は交差点に特有の区画線等を検出するためのデータである。
【0017】
(経路探索部111の説明)
経路探索部111は、自車両の現在地からユーザにより設定された目的地までの最適な経路を探索する処理である、経路探索処理を実行する。目的地がユーザにより設定されると、経路探索部111は現在地検出装置170により検出された現在地を出発地として目的地までの経路演算を所定のアルゴリズムに基づいて行う。例えば、出発地から目的地までの間の旅行時間(リンク旅行時間の合計)が最小になるような経路を演算するアルゴリズムで経路演算が行われる。以上の経路探索処理により求められた経路(以下、推奨経路という)は、表示形態、たとえば表示色などを変えることによって、他の道路とは区別して画面に表示される。これにより、ユーザは推奨経路を地図画面上で認識することができる。
【0018】
(経路案内部112の説明)
経路案内部112は経路案内処理を実行する。経路案内処理とは、自車両の運転者が経路探索部111により探索された推奨経路に従って自車両を走行させられるように、運転者に対して表示装置140の画面やスピーカ150による音声などにより進行方向指示を行い、車両を経路誘導する処理である。
【0019】
経路案内処理の実行中、経路案内部112は表示装置140の画面に、自車両の周辺地域の地図を表示する。そして、地図上に、自車両の向きおよび現在地を表すマークを表示する。本実施形態では、このマークは三角形である。以下、このマークを自車位置マークと呼ぶ。
【0020】
経路案内処理を行うためには自車両の現在地が必要となる。本実施形態の経路案内部112は、現在地検出装置170により検出された現在地に、いわゆるマップマッチング処理を施して得られた位置を、自車両の現在地として扱う。マップマッチング処理とは、自車両の現在地を適切なリンク上の位置に補正する処理である。つまり、経路案内部112は、現在地検出装置170により検出された位置そのものではなく、現在地に対応付けられたリンク上の位置を自車両の現在地として扱う。経路案内部112は、マップマッチング処理を行い補正した現在地に基づいて、画面に自車位置マークを表示したり、経路誘導を行ったりする。
【0021】
本実施形態の経路案内部112は、走行経路判定部116に自車両が走行した経路を判定させる。そして、自車両が走行したと判定された経路に基づきマップマッチングを行う。以下、走行経路判定部116が行う走行経路の判定処理について説明する。
【0022】
(走行経路の判定処理の説明)
走行経路判定部116は、走行経路の判定処理に、特徴点抽出部113、走行軌跡記録部114、および特徴点記録部115を用いる。特徴点抽出部113は、テンプレートデータ132を用いた周知のパターンマッチング処理により、カメラ180が出力する画像信号から交差点の位置を表す情報である特徴点を抽出する。
【0023】
図2は、カメラ180の詳細を示す模式図である。図2には、道路20を走行中の自車両21が示されている。カメラ180は自車両21の前方の路面を撮像可能なように、自車両21の前面に設置されている。カメラ180の撮影範囲22は、自車両21の前方に存在する交差点が含まれるように設定される。
【0024】
図3は、特徴点抽出部113によるパターンマッチング処理の詳細を示す図である。図3(a)は、道路20においてカメラ180が出力した撮影画像30の一例を示している。特徴点抽出部113は、撮影画像30の全体のうち下部に位置する所定範囲のウィンドウ31に対し、テンプレートデータ132を用いたパターンマッチング処理を実行する。このパターンマッチング処理により、自車両から所定距離(例えば5m)だけ前方に交差点が存在することが検知される。つまり、交差点の位置は自車両の現在地と上記の所定距離とから算出可能である。特徴点抽出部113は、交差点の存在を検知すると、当該交差点の位置を表す情報である特徴点を出力する。
【0025】
テンプレートデータ132により検知される、交差点に特有の区画線等の例を図3(b)に示す。テンプレートデータ132は、図3(b)に示す区画線等を検出可能に構成される。また、図3(a)に示したウィンドウ31は、これらの区画線等を検出可能な範囲に定められる。
【0026】
特徴点抽出部113は上述のパターンマッチング処理により特徴点を抽出すると、抽出した特徴点を主記憶装置(不図示)に一時的に記録する。以下の説明では、この一時的に記憶された特徴点を、一時特徴点と呼ぶ。
【0027】
走行軌跡記録部114は、現在地検出装置170により検出された複数の現在地を、自車両の走行軌跡として、不図示の主記憶装置へ時系列順に記録する。具体的には、自車両が所定距離(例えば1メートル)走行するたびに、その時点で現在地検出装置170により検出されている最新の現在地を主記憶装置に記録する。これにより、これまでに自車両が走行してきた軌跡が、主記憶装置に記録される。
【0028】
特徴点記録部115は、主記憶装置に一時特徴点が記録されている場合、走行軌跡記録部114により現在地が記録される度に、当該現在地と一時特徴点との間の距離を演算する。そして、主記憶装置に記録される現在地のうち当該距離が最も短い現在地に関連付けて、特徴点を記録する。つまり、特徴点記録部115によって一時特徴点は正式に主記憶装置に記録される。
【0029】
図4は、特徴点抽出部113、走行軌跡記録部114、および特徴点記録部115の動作を説明するための模式図である。図4(a)には、ある時刻t0において、道路40を走行中の自車両41が交差点に向かって走行している様子が示されている。このとき、現在地検出装置170は黒く塗りつぶされた三角形42で表す位置を、現在地として検出する。
【0030】
図4(b)は、図4(a)に示す道路40のノード情報およびリンク情報を模式的に示した図である。図4(a)に示す道路40は、5つのノード(43a〜43d、44)および各ノードを接続する4つのリンク(45a〜45d)により構成されている。これらのノードのうち、ノード44のノード情報には、当該ノードが交差点を表すノードであるという情報が含まれている。すなわち、地図データ131には、ノード44が特徴点抽出部113により抽出される特徴点に対応する地点であることを表す情報が含まれている。
【0031】
図4(c)は、図4(a)に対応する時刻t0から一定時間が経過した時刻t1における自車両41の様子を示す図である。図4(c)中に白抜きの丸で示した点p1〜p3は、それぞれ走行軌跡記録部114により記録された走行軌跡の各地点を表している。自車両41が図4(c)に示す現在地46に到達したとき、特徴点抽出部113により前方に交差点が存在することが検知されたものとする。このとき特徴点抽出部113は、自車両41の現在地46から所定距離47だけ前方の位置(図4(c)において白抜きの菱形48で表す位置)を交差点の位置であると判断する。そして、この交差点の位置を表す情報を特徴点として抽出する。抽出された特徴点は、主記憶装置(不図示)に一時的に記録される。すなわち、主記憶装置に一時特徴点が記録される。
【0032】
図4(d)は、図4(c)に対応する時刻t1から更に一定時間が経過した時刻t2における自車両41の様子を示す図である。図4(d)では、図4(c)から更に点p4〜p9で表す各地点が、走行軌跡記録部114により主記憶装置に記録されている。主記憶装置に一時特徴点が存在する場合、走行軌跡記録部114により現在地が記録される度に、特徴点記録部115が一時特徴点と現在地との間の距離を演算する。すなわち、特徴点記録部115は、点p4と一時特徴点48との間の距離や、点p5と一時特徴点48との間の距離を演算する。そして、直前に演算された距離に比べて最新の距離が大きい場合、すなわち一時特徴点48から自車両が遠ざかった場合に、直前に記録された現在地に関連付けて特徴点48を記録する。このとき、特徴点48は最早一時特徴点ではなく、言わば正式に特徴点として主記憶装置に記録される。
【0033】
例えば図4(d)において、点p8と一時特徴点48との間の距離49よりも、その後に演算される点p9と一時特徴点48との間の距離50の方が大きい。特徴点記録部115は、距離50を演算した時点で、一時特徴点48を特徴点として点p8で表される位置に関連付けて主記憶装置に記憶する。
【0034】
図4(e)は、最終的に主記憶装置に記録される走行軌跡51を示す図である。このように、主記憶装置には点p1〜p9で表される各地点から成る走行軌跡51が記録される。また、点p8で表される地点には、特徴点48が関連付けて記録されている。走行経路判定部116は、このようにして記録された走行軌跡51を、自車両41の付近のリンクおよびノード(例えば図4(b)に示すリンクおよびノード)と比較することにより、自車両41が走行した経路を判定する。具体的には、走行軌跡51の形状および各地点に対応する特徴点48をリンク情報およびノード情報と比較する。
【0035】
経路案内部112はマップマッチングを所定のタイミングで実行する。例えば、図4(c)に示す時刻t1においてマップマッチングが実行された場合、走行経路判定部116はその時点において主記憶装置に記録されている点p1、p2、p3から成る走行軌跡を用いて走行経路の判定を行う。具体的には、まず周知の手法によりこの走行軌跡と図4(b)に示すリンク形状とを比較する。そして、この比較により走行経路をただ1つに絞りきれない場合に、特徴点を用いて候補となる走行経路を絞り込む。図4(c)に示す時刻t1の状態では、十分な走行軌跡が記録されていないため、マップマッチングを正しく行えない可能性がある。しかしながら、その後、例えば図4(d)に示す時刻t2において経路案内部112により再度マップマッチングが実行されれば、特徴点48を含む十分な長さの走行軌跡51が主記憶装置に記憶されているので、マップマッチングを正しく行うことが期待できる。
【0036】
なお、記録された走行軌跡51は、走行経路判定部116が走行経路の判定に用いるのみならず、経路案内部112により表示装置140の画面に、地図に重ねて表示される。これは、ユーザがこれまでにどのような経路を走行してきたかを把握しやすいようにするための表示である。この表示では、例えば図4(d)に模式的に示したように、走行軌跡51と共に特徴点48が表示される。
【0037】
走行経路判定部116により行われる判定では、ノード44が交差点すなわち特徴点に対応する地点であることが重要となる。例えば図4(b)に示すリンクおよびノードと、図4(e)に示す走行軌跡51とを比較する場合、点p8で示す地点が特徴点48に関連付けられていることから、走行経路判定部116は、点p8と特徴点に対応するノードとをマッチングさせようとする。図4(b)に示すノードのうち特徴点に対応するノードはノード44のみであるので、点p8がノード44にマッチングすることは明らかである。このように、走行経路の判定に特徴点に関する情報を用いることにより、走行経路の判定の錯誤を抑止することが可能となる。
【0038】
図5は、走行経路の記録処理のフローチャートである。図5に示す処理は、制御回路110がフラッシュメモリ120から読み込んだ所定の制御プログラムを実行することにより、ソフトウェア的に実現される。制御回路110は、自車両の経路誘導中に、図5に示す処理を繰り返し実行する。
【0039】
まずステップS500では、現在地検出装置170が自車両の現在地を取得する。ステップS510では、特徴点抽出部113が、カメラ180により撮影された撮影画像から特徴点を抽出したか否かを判定する。特徴点が抽出された場合には肯定判定がなされ、処理はステップS520に進む。ステップS520では、特徴点抽出部113がステップS510で抽出した特徴点を一時特徴点として主記憶装置に記録する。他方、ステップS510において否定判定がなされた場合にはステップS530に進む。
【0040】
ステップS530では、走行軌跡記録部114が、走行軌跡を前回記録してから自車両が所定距離(例えば1メートル)を走行したか否かを判定する。自車両の走行距離が所定距離未満であった場合には否定判定がなされ、本処理は終了する。他方、自車両が所定距離を走行していた場合には肯定判定がなされ、ステップS540に進む。ステップS540では、走行軌跡記録部114がステップS500において取得された現在地を主記憶装置に記録する。
【0041】
ステップS550では、特徴点記録部115が、主記憶装置に一時特徴点が記録されているか否かを判定する。一時特徴点が記録されていない場合には否定判定がなされ、本処理は終了する。他方、ステップS550において肯定判定がなされた場合にはステップS560に進む。ステップS560では、特徴点記録部115が、ステップS500において取得された現在地から一時特徴点までの距離を算出する。
【0042】
ステップS570では、特徴点記録部115が、ステップS560において算出された距離が前回算出された距離よりも長いか否か、すなわち、自車両が一時特徴点から遠ざかったか否かを判定する。直近の距離が前回算出された距離以下であった場合には否定判定がなされ、本処理は終了する。他方、ステップS570において肯定判定がなされた場合にはステップS580に進む。ステップS580では、特徴点記録部115が、走行軌跡記録部114により前回記録された現在地に関連付けて、一時特徴点を特徴点として主記憶装置に記録する。
【0043】
上述した第1の実施の形態による車載用ナビゲーション装置によれば、次の作用効果が得られる。
(1)特徴点抽出部113は、カメラ180が道路の地物を撮影した撮影画像から、特徴的な地物が存在する位置を表す情報である特徴点を抽出する。特徴点記録部115は、走行軌跡記録部114により記録された走行軌跡に含まれる各地点のうち、いずれかの地点に関連付けて、特徴点抽出部113により抽出された特徴点を記録する。このようにしたので、マップマッチングの精度を向上させることができる。
【0044】
(2)地図データ131のノード情報には、交差点すなわち特徴点に対応するノードであることを表す情報が含まれる。走行経路判定部116は走行軌跡記録部114により記録された走行軌跡の形状および特徴点記録部115により記録された特徴点と、地図データ131のリンク情報およびノード情報と、を比較することにより、自車両が走行した経路を判定する。このようにしたので、単純な走行軌跡の形状比較に比べて精度の向上および計算量の削減が可能となる。
【0045】
(3)特徴点抽出部113は、交差点の位置を表す情報を、テンプレートデータ132とカメラ180の撮影画像とのパターンマッチングにより抽出する。このようにしたので、交差点に接近したときに交差点の位置を確実に検出することが可能となる。
【0046】
(4)経路案内部112は、走行軌跡と、走行軌跡に含まれる地点に関連付けて記録された特徴点と、を共に表示する。このようにしたので、ユーザが過去の走行経路を認識することが容易になる。
【0047】
次のような変形も本発明の範囲内であり、変形例の一つ、もしくは複数を上述の実施形態と組み合わせることも可能である。
【0048】
(変形例1)
地図データ131およびテンプレートデータ132は、HDD130以外の記憶手段に記憶させてもよい。例えばDVD−ROM等の記憶媒体を用いてもよいし、ナビゲーション装置100の外部から無線通信により地図データ131およびテンプレートデータ132を受信するようにしてもよい。
【0049】
(変形例2)
現在地の検出を、第1の実施の形態における現在地検出装置170以外の装置により行ってもよい。例えば、衛星を利用した測位システムのみで現在地を検出するようにしてもよい。
【0050】
(変形例3)
交差点以外の特徴的な地物の位置を表す情報を特徴点としてもよい。例えば、路面や路側に設置されたマーカーやビーコン等の位置が、特徴点として抽出されるようにしてもよい。この場合、地図データ131に含まれるノード情報にも、これらの特徴点に対応するノードであるという情報が含まれることとなる。
【0051】
(変形例4)
走行経路判定部116による判定がなされた後、主記憶装置に記録されている走行軌跡は速やかに削除されるようにしてもよいし、一定の基準で主記憶装置に蓄積されるようにしてもよい。主記憶装置に走行軌跡が蓄積される場合には、走行経路判定部116は主記憶装置に蓄積された一連の走行軌跡に基づき走行経路の判定を行うことができるので、追加の記憶容量および演算時間が必要となる一方で、走行経路判定の精度をより向上させることが可能である。
【0052】
本発明の特徴を損なわない限り、本発明は上記実施の形態に限定されるものではなく、本発明の技術的思想の範囲内で考えられるその他の形態についても、本発明の範囲内に含まれる。
【符号の説明】
【0053】
100…車載用ナビゲーション装置、110…制御回路、111…経路探索部、112…経路案内部、113…特徴点抽出部、114…走行軌跡記録部、115…特徴点記録部、116…走行経路判定部、120…フラッシュメモリ、130…ハードディスクドライブ(HDD)、170…現在地検出装置、180…カメラ
【特許請求の範囲】
【請求項1】
道路の地物を撮影し画像信号を出力する撮像手段と、
前記画像信号から、特徴的な地物が存在する位置を表す情報である特徴点を抽出する特徴点抽出手段と、
自車両の現在地を検出する現在地検出手段と、
前記現在地検出手段により異なる時間にそれぞれ検出された複数の前記現在地を、自車両の走行軌跡として記録する走行軌跡記録手段と、
前記特徴点により表される位置に基づいて、当該特徴点を前記走行軌跡に含まれるいずれかの地点に関連付けて記録する特徴点記録手段と、
を備えることを特徴とする車載用ナビゲーション装置。
【請求項2】
請求項1に記載の車載用ナビゲーション装置において、
道路形状を表す道路データと、前記道路データにおいて前記特徴点に対応する地点を表す地点データと、を含む地図データが記録される地図データ記録手段と、
前記走行軌跡記録手段により記録された前記走行軌跡の形状および前記特徴点記録手段により記録された前記特徴点と、前記道路データおよび前記地点データと、を比較することにより自車両が走行した経路を判定する走行経路判定手段とを更に備えることを特徴とする車載用ナビゲーション装置。
【請求項3】
請求項1または2に記載の車載用ナビゲーション装置において、
前記特徴点抽出手段は、交差点の位置を表す情報を前記特徴点として抽出し、
前記地図データ記録手段には、交差点の位置を表すデータが前記地点データとして記録されることを特徴とする車載用ナビゲーション装置。
【請求項4】
請求項3に記載の車載用ナビゲーション装置において、
前記特徴点抽出手段は、前記交差点の位置を表す情報を、所定の画像パターンと前記画像信号とのパターンマッチングにより抽出することを特徴とする車載用ナビゲーション装置。
【請求項5】
請求項1〜4のいずれか一項に記載の車載用ナビゲーション装置において、
前記走行軌跡と、前記走行軌跡に含まれる地点に関連付けて記録された前記特徴点と、を共に表示する表示手段を更に備えることを特徴とする車載用ナビゲーション装置。
【請求項1】
道路の地物を撮影し画像信号を出力する撮像手段と、
前記画像信号から、特徴的な地物が存在する位置を表す情報である特徴点を抽出する特徴点抽出手段と、
自車両の現在地を検出する現在地検出手段と、
前記現在地検出手段により異なる時間にそれぞれ検出された複数の前記現在地を、自車両の走行軌跡として記録する走行軌跡記録手段と、
前記特徴点により表される位置に基づいて、当該特徴点を前記走行軌跡に含まれるいずれかの地点に関連付けて記録する特徴点記録手段と、
を備えることを特徴とする車載用ナビゲーション装置。
【請求項2】
請求項1に記載の車載用ナビゲーション装置において、
道路形状を表す道路データと、前記道路データにおいて前記特徴点に対応する地点を表す地点データと、を含む地図データが記録される地図データ記録手段と、
前記走行軌跡記録手段により記録された前記走行軌跡の形状および前記特徴点記録手段により記録された前記特徴点と、前記道路データおよび前記地点データと、を比較することにより自車両が走行した経路を判定する走行経路判定手段とを更に備えることを特徴とする車載用ナビゲーション装置。
【請求項3】
請求項1または2に記載の車載用ナビゲーション装置において、
前記特徴点抽出手段は、交差点の位置を表す情報を前記特徴点として抽出し、
前記地図データ記録手段には、交差点の位置を表すデータが前記地点データとして記録されることを特徴とする車載用ナビゲーション装置。
【請求項4】
請求項3に記載の車載用ナビゲーション装置において、
前記特徴点抽出手段は、前記交差点の位置を表す情報を、所定の画像パターンと前記画像信号とのパターンマッチングにより抽出することを特徴とする車載用ナビゲーション装置。
【請求項5】
請求項1〜4のいずれか一項に記載の車載用ナビゲーション装置において、
前記走行軌跡と、前記走行軌跡に含まれる地点に関連付けて記録された前記特徴点と、を共に表示する表示手段を更に備えることを特徴とする車載用ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−237377(P2011−237377A)
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2010−111160(P2010−111160)
【出願日】平成22年5月13日(2010.5.13)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
【公開日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願日】平成22年5月13日(2010.5.13)
【出願人】(000001487)クラリオン株式会社 (1,722)
【Fターム(参考)】
[ Back to top ]