
車載用レーダ装置
【課題】 間違った目標捕捉(乗り移り)の発生を回避できる車載用レーダ装置を提供する。
【解決手段】 自車(10)前方にパルス状の電磁波(12)を周期的に照射し、その反射波(13)に基づいて、少なくとも目標の水平方向の幅を測定する車載用レーダ装置(11)において、前記反射波の先回または数回前の強さと今回の強さとを比較する比較手段(17)と、今回の反射波の強さが急減少し、且つ、前記目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに間違った目標であると判定する第1判定手段(17)とを備える。または、今回の反射波の強さが急増大したときに間違った目標であると判定する第2判定手段(17)を備える。
【解決手段】 自車(10)前方にパルス状の電磁波(12)を周期的に照射し、その反射波(13)に基づいて、少なくとも目標の水平方向の幅を測定する車載用レーダ装置(11)において、前記反射波の先回または数回前の強さと今回の強さとを比較する比較手段(17)と、今回の反射波の強さが急減少し、且つ、前記目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに間違った目標であると判定する第1判定手段(17)とを備える。または、今回の反射波の強さが急増大したときに間違った目標であると判定する第2判定手段(17)を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車等車両(以下、車両という。)に搭載される車載用レーダ装置に関する。
【背景技術】
【0002】
車載用レーダ装置は、電波や光などの電磁波を一塊り(パルス状)にして車両前方に発射し、その反射波に基づいて自車前方の障害物までの距離や方位などの情報を検知するいわゆるパルスレーダ方式のレーダ装置である。なお、電場と磁場には、時間的に一定の静的場と、時間的に変動して空間の遠方まで伝播する波動場とがあり、この波動場のことを「電磁波」という。電磁波の典型は電波であるが、光やX線なども電磁波である。
【0003】
ここで、車載用レーダ装置の送信部から発射されたパルス状の電磁波は、自車前方の障害物(以下、便宜的に先行車とする。)のボディ表面(または後部リフレクタ若しくはそれに相当する反射部位)で反射され、車載用レーダ装置の受信部で受信される。今、電磁波の発射時点から反射波の受信時点までの時間をTとするとき、先行車との車間距離Lは「L=(T×光の速度)÷2」で与えられる。また、自車(車載用レーダ装置の設置車両)を基準にした先行車の方位は、パルス状電磁波の発射方向で与えられ、たとえば、発射方向を0度(つまり、自車の進行方向)とすれば、先行車の方位も0度で与えられる。
【0004】
車載用レーダ装置の従来技術としては、たとえば、下記の特許文献1に記載されたものが知られている。このレーダ装置では、水平走査の一単位領域(自車前方の水平方向の監視範囲、つまり水平走査範囲を細分化した領域:以下、水平走査単位領域という。)ごとに、電磁波の一種であるレーザ光をパルス状にして発射し、先行車等の障害物からの反射波を受光するまでの時間から先行車までの距離を求め、また、当該反射波が得られたときの水平走査単位領域の走査角度(水平走査角度)から先行車の方位を求める。
【0005】
車載用レーダ装置は、以上の原理により、自車前方の障害物(先行車等)までの距離や方位を検出するものであるが、反射波の中には、本来、障害物として検出すべきではない、たとえば、路面からの反射波も含まれることがあり、この場合、路面を偽の障害物として誤検出してしまうという不都合がある。
【0006】
そこで、従来技術においては、先行車からの反射波と路面からの反射波の波形の違い、詳細には、先行車からの反射波の強さは路面からの反射波のそれよりも大きく、且つ、先行車からの反射波の継続時間(反射波形の裾野の拡がり)は路面からの反射波のそれよりも短いことに着目し、これらの違いに基づいて両者(先行車と路面)を区別する仕組みを開示している(特許文献1の段落〔0040〕及び図5参照)。
【0007】
【特許文献1】特開2003−42757号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に記載された従来の車載用レーダ装置にあっては、単に「先行車からの反射波と路面からの反射波の波形の違い」に基づいて、先行車と路面とを区別しているので、たとえば、以下のような状況においては、路面と先行車とを区別できないという不都合がある。
【0009】
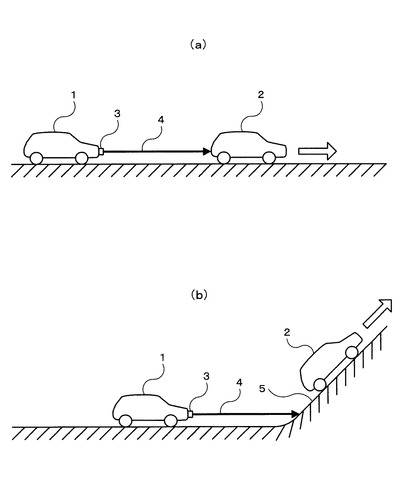
図10は、従来技術の不都合説明図(上り坂の場合)である。この図において、(a)に示すように、自車1の前方を走行中の先行車2は、自車1の車載用レーダ装置3から発射されたレーザ光4で捕捉されているものとする。今、(b)に示すように、先行車2が急な坂道を上り始めたとき、車載用レーダ装置3から発射されたレーザ光4は、先行車2を外れて登坂路5を照射することになる。このような登坂路5(急な坂道)は、たとえば、屋内駐車場の入り口や、堤防等の登り口などによく見られる。
【0010】
さて、このように、レーザ光4が先行車2を外れて登坂路5を照射したとき、車載用レーダ装置3は、本来、先行車2をロスト(見失った)したと判断して目標捕捉を断念し、所要の処置(たとえば、運転者に対するロスト警告等)を講ずべきであるが、本件発明者らの実験(前記の従来技術を用いたもの)によれば、しばしば、登坂路5を先行車2と誤認し、目標捕捉を継続(先行車2→登坂路5)するという結果が得られた。
【0011】
これは、いわば、先行車2から登坂路5への間違った目標捕捉である。以下、この間違った目標捕捉のことを「乗り移り」ということにすると、このような乗り移りが発生すると、たとえば、車載用レーダ装置3の測定結果を車間距離制御システムに利用していた場合には、先行車2が急停止したと誤判定してしまい、その結果、自車1の急制動を余儀なくされるという不快な状況に陥る。
【0012】
かかる不本意な結果の原因は、乗り移りが発生する程度の急な坂道(登坂路5)の場合、その坂道で跳ね返った反射波と、先行車2からの反射波の波形とがかなり似ているためであると考えられる。
【0013】
なお、このような乗り移り問題は、急な上り坂だけでなく、下り坂でも発生することがある。
【0014】
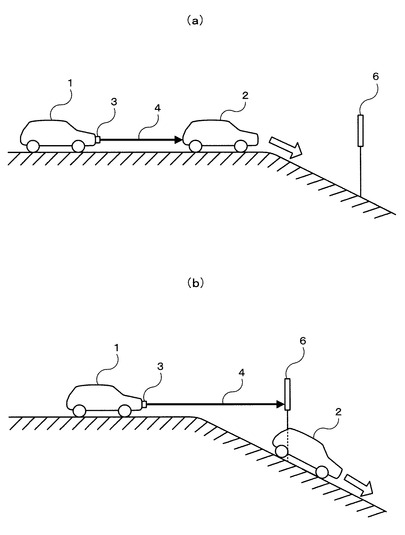
図11は、従来技術の不都合説明図(下り坂の場合)である。この図において、(a)に示すように、自車1の前方を走行中の先行車2は、自車1の車載用レーダ装置3から発射されたレーザ光4で捕捉されているものとする。ここで、先行車2の前方には急な下り坂があって、しかも、その下り坂の途中に光をよく反射する固定障害物(典型的には道路案内板6)が設置されているものとし、且つ、その道路案内板6がレーザ光4の照射方向の延長線上に位置しているものとする。
【0015】
今、(b)に示すように、先行車2が急な坂道を下り始めたとき、車載用レーダ装置3から発射されたレーザ光4は、先行車2を外れて道路案内板6を照射することになり、図10と同様に、先行車2から道路案内板6への間違った目標捕捉(乗り移り)が発生する。このため、先行車2が急停止したと誤判定してしまい、やはり、自車1の急制動を余儀なくされるという不快な状況に陥る。この原因も、乗り移りが発生する程度の急な坂道の場合、その坂道の途中に設置された固定障害物(ここでは道路案内板6)で跳ね返った反射波と、先行車2からの反射波の波形とがかなり似ているためであると考えられる。
【0016】
そこで本発明の目的は、間違った目標捕捉(乗り移り)の発生を回避できる車載用レーダ装置を提供することにある。
【課題を解決するための手段】
【0017】
請求項1記載の発明は、電磁波を発信する送信手段と、前記送信手段が発信した電磁波を水平方向に走査する走査手段と、前記送信手段が発信した電磁波について、目標で反射したその反射波を受信する受信手段と、前記送信手段が電磁波を発信してから、前記受信手段が反射波を受信するまでの経過時間、および前記走査手段による電磁波の走査方向に基づいて、その電磁波を反射した目標の少なくとも位置と水平方向の幅を検出する車載用レーダ装置において、前期受信手段が受信した前記反射波の先回または数回前の強さを記憶すると共に、記憶した先回または数回前の反射波の強さと今回の強さとを比較する比較手段と、今回の反射波の強さが先回または数回前の強さに比べて急減少し、且つ、前記目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに、今回検出した前記目標は、先回または数回前から継続的に検出していた目標とは異なると判定する第1判定手段とを備えたことを特徴とする車載用レーダ装置である。
ここで、「急減少」について定義する。今、電磁波の反射効率に差がある二つの物体を想定し、それぞれを高反射物体、低反射物体ということにする。車両のボディはその表面がよく磨き上げられており、電磁波をよく跳ね返すので、「高反射物体」ということができ、それに対して、路面は表面が微細な凹凸で覆われているので、「低反射物体」ということができる。「急減少」とは、高反射物体からの反射波を受信しているときに、その反射波が低反射物体からの反射波に入れ替わったときの時間軸上における反射波の強さの変化のことをいう。したがって、急減少の“急”は定量的に示されない。“入れ替わり”が判別できる程度の特異な変化を呈していればよい。
請求項2記載の発明は、電磁波を発信する送信手段と、前記送信手段が発信した電磁波を水平方向に走査する走査手段と、前記送信手段が発信した電磁波について、目標で反射したその反射波を受信する受信手段と、前記送信手段が電磁波を発信してから、前記受信手段が反射波を受信するまでの経過時間、および前記走査手段による電磁波の走査方向に基づいて、その電磁波を反射した目標の少なくとも位置と水平方向の幅を検出する車載用レーダ装置において、前期受信手段が受信した前記反射波の先回または数回前の強さを記憶する記憶手段と、前記記憶手段に記憶されていた先回または数回前の反射波の強さと今回の強さとを比較する比較手段と、今回の反射波の強さが先回または数回前の強さに比べて急増大したときに、今回検出した前記目標は、先回または数回前から継続的に検出していた目標とは異なると判定する第第2判定手段とを備えたことを特徴とする車載用レーダ装置である。
ここで、「急増大」について定義する。今、前記の高反射物体よりも、さらに電磁波をよく反射する物体のことを「高々反射物体」ということにする。このような高々反射物体の例としては、ガラス粉末を混入した塗料で文字や図形等が描かれた道路案内板がある。「急増大」とは、前記の高反射物体(車両のボディ)からの反射波を受信しているときに、その反射波が高々反射物体からの反射波に入れ替わったときの時間軸上における反射波の強さの変化のことをいう。したがって、この急増大の“急”も定量的に示されない。“入れ替わり”が判別できる程度の特異な変化を呈していればよい。
請求項3記載の発明は、前記第1判定手段で間違った目標が判定されたときに、前記電磁波の垂直方向の照射角度を上向きに変更する変更手段を備えたことを特徴とする請求項1記載の車載用レーダ装置である。
請求項4記載の発明は、前記第2判定手段で間違った目標が判定されたときに、前記電磁波の垂直方向の照射角度を下向きに変更する変更手段を備えたことを特徴とする請求項2記載の車載用レーダ装置である。
【発明の効果】
【0018】
本発明によれば、反射波の強さが急減少し、且つ、目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに、今回検出した前記目標は、先回または数回前から継続的に検出していた目標とは異なると判定し、または、反射波の強さが急増大したときに、今回検出した前記目標は、先回または数回前から継続的に検出していた目標とは異なると判定するので、不本意な「乗り移り」の発生を回避できる車載用レーダ装置を提供することができる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施の形態を、レーザ光を用いた車載用レーダ装置への適用を例にして、図面に基づいて説明する。なお、以下の説明における様々な細部の特定ないし実例および数値や文字列その他の記号の例示は、本発明の思想を明瞭にするための、あくまでも参考であって、それらのすべてまたは一部によって本発明の思想が限定されないことは明らかである。また、周知の手法、周知の手順、周知のアーキテクチャおよび周知の回路構成等(以下「周知事項」)についてはその細部にわたる説明を避けるが、これも説明を簡潔にするためであって、これら周知事項のすべてまたは一部を意図的に排除するものではない。かかる周知事項は本発明の出願時点で当業者の知り得るところであるので、以下の説明に当然含まれている。
【0020】
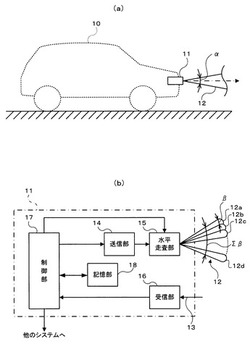
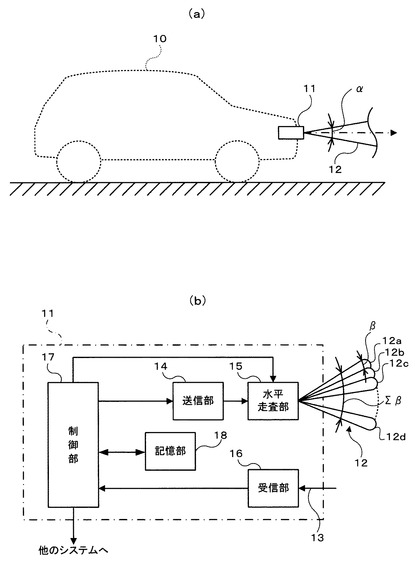
図1は、実施の形態に係る車載用レーダ装置の全体構成図である。この図において、自車10のフロント側、たとえば、フロントグリルに取り付けられた車載用レーダ装置11は、自車10の前方(進行方向)に向けてレーザ光12をパルス状にして照射し、その反射光13を受信(正確には受光であるが、ここでは便宜上、受信という。)して、その受信データから、自車10の前方に存在する先行車等の障害物(以下、目標ともいう。)を検出すると共に、その目標までの距離(自車10からの距離)や、方位(自車10の進行方向を基準にした方位)及び目標の幅(目標の水平方向の幅)などの情報を算出し、その情報を、自車10に搭載された他のシステム(たとえば、先行車追随システムなど)に出力するものである。
【0021】
ここで、“レーザ”とは、誘導放出による光増幅(Light Amplification by Stimulated Emission of Radiation)の略(LASER)であり、一般的に、単一波長の位相が揃ったコヒーレントな光であって、且つ、断面が円形に細く絞り込まれたビーム形状の光線のことと解されている。図示のレーザ光12もコヒーレントな光の点でこの解釈に従うものの、ビーム断面の形状についてはこれに従わない。詳細には、レーザ光12は水平方向の幅βに対して垂直方向の幅αが大きい、いわゆるファンビーム形状をなしている点で相違する。
【0022】
ファンビーム形状にした理由は、自車10の走行に伴う車体の上下運動(ピッチング運動)の影響を受け難くするためである。つまり、垂直方向の幅αも狭くしてしまうと、自車10のピッチングに伴ってレーザ光12が上下動し、目標を捕捉できなくなるからであり、ピッチングを考慮して垂直方向の幅αを若干大きくしておけば、このような不都合を回避できるからである。
【0023】
なお、レーザ光12の水平方向の幅βは、車載用レーダ装置11の水平方向の目標分解能を決定するので、できるだけ狭いことが望ましいものの、狭すぎる水平方向の幅βは、後述の水平走査単位領域の増加を招き、情報量の増加に伴い一回の水平走査(角度Σβ)の走査時間が長くなるので、両者(目標分解能と水平走査時間)の兼ね合いから適切に設定することになる。
【0024】
車載用レーダ装置11は、簡略的に示せば、送信部14と、水平走査部15と、受信部16と、制御部17と、記憶部18とを含んで構成される。
【0025】
送信部14は、制御部17からの送信指示に従ってレーザ光をパルス変調して水平走査部15に出力する。レーザ光の出力間隔(パルス間隔)は車載用レーダ装置11の最大探知距離を決定する。水平走査部15は、送信部14からのパルス状のレーザ光を水平走査して自車10の前方に照射する。水平走査は、所定の水平走査角度Σβ(自車10の前方の監視範囲を充分にカバーする角度であって、たとえば、30度程度の角度である。)を細分化した水平走査単位領域12a〜12dごとに、制御部17からの走査指示に従って順次に行われるようになっており、ここでは、各々の水平走査単位領域12a〜12dの角度をそれぞれβとしている。
【0026】
なお、水平走査部15におけるレーザ光の水平走査は、たとえば、回転多面鏡(ポリゴンミラー)を用いるなどの光学的手法によって行うことができるが、本発明の思想はこれに限定されない。要は、角度βの単位で且つ所定の角度Σβの範囲でレーザ光を水平走査できればよく、たとえば、角度βの単位でレーザダイオード等のレーザ光源をアレイ状に配列し、それらの光源を順次に駆動することにより、所定の角度Σβの範囲を水平走査するようにしてもよい。この場合、図示の送信部14と水平走査部15は区別されず、一体化されることになる。
【0027】
制御部17は、プログラム制御方式のマイクロプロセッサユニット(いわゆるコンピュータ)で構成されたもの、あるいは、全てまたは多くの論理部分がハードロジックで構成されたものであるが、以下、便宜的に前者の構成(コンピュータで構成されたもの)であるとすると、この制御部17は、後述の制御プログラムを実行することにより、送信部14や水平走査部15の動作を制御しつつ、受信部16の受信データを取り込んで記憶部18に記憶すると共に、その受信データに基づいて、自車10の前方に存在する先行車等の目標を検出して、その目標までの距離や方位、並びに、距離と方位から目標の幅などの情報を算出し、その情報を、自車10に搭載された他のシステム(たとえば、車間距離制御システムなど)に出力する。
【0028】
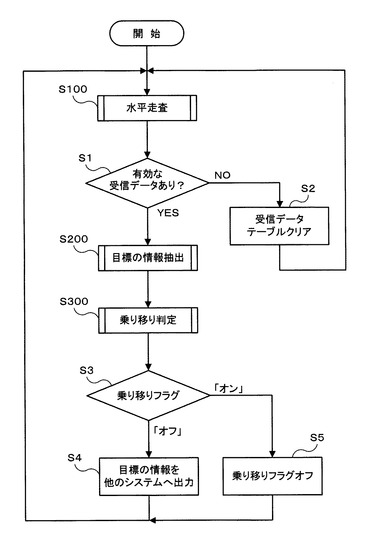
図2は、制御部17で実行される制御プログラムの簡略的な動作フローを示す図である。この制御プログラムでは、まず、一水平走査角度Σβの範囲を水平走査単位領域12a〜12dごとに順次に走査しながら、受信データを取得する(ステップS100)。この水平走査処理の具体的説明は後述する。
【0029】
角度Σβの一回の水平走査処理を完了すると、次に、その水平走査期間おいて取得した受信データの中に有効な受信データが含まれていたか否かを判定し(ステップS1)、含まれていなかった場合は、後述の受信データテーブル19(図4参照)をクリア(ステップS2)して、再び水平走査処理を実行する(ステップS100)。ここで、“有効な受信データ”とは、バックグラウンドノイズ等を考慮して設定された所定の閾値を超える大きさの受信データのことをいう。
【0030】
有効な受信データありを判定した場合は、次いで、その受信データに基づいて、目標の情報(目標までの距離、方位及び目標の幅等)を抽出する(ステップS200)。目標の情報抽出処理の具体的説明は後述する。
【0031】
次いで、本実施の形態の特徴である「乗り移り判定処理」(ステップS300)を実行し、その後、この乗り移り判定処理によって、乗り移りが判定されたときにオンとなるフラグ(乗り移りフラグ)を調べ(ステップS3)、フラグがオフであれば、不本意な乗り移りが発生していないと判断して、ステップS200で抽出した目標の情報を他のシステムに出力(ステップS4)してから、再び水平走査処理を実行する(ステップS100)一方、乗り移りフラグがオンであれば、不本意な乗り移りが発生していると判断して、乗り移りフラグをオフ(ステップS5)にした後、そのまま再び水平走査処理を実行する(ステップS100)。
【0032】
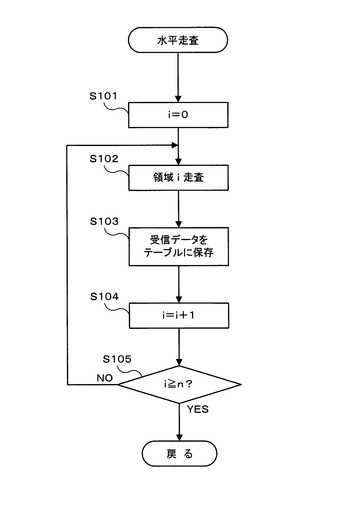
図3は、水平走査処理(図2のステップS100)の具体的な動作フローを示す図である。このフローにおいては、まず、水平走査単位領域12a〜12dを指定するための変数iを初期化(i=0)し(ステップS101)、次いで、i番目の水平走査単位領域を走査する(ステップS102)。ここで、水平走査単位領域12aは0番、水平走査単位領域12bは1番、水平走査単位領域12cは2番、・・・・、水平走査単位領域12dはn番であるものとする。現在、i=0であるので、水平走査単位領域12aが走査される。
【0033】
次いで、水平走査単位領域12aの走査中の受信データを、記憶部18内の受信データテーブルに保存する(ステップS103)。
【0034】
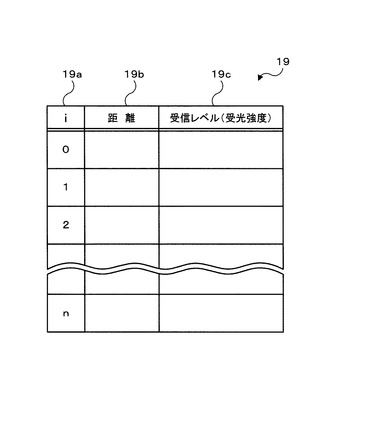
図4は、受信データテーブル19の一例構造図である。この図において、受信データテーブル19は、iフィールド19a、距離フィールド19b及び受信レベルフィールド19cを含む多数のレコードで構成されている。先頭のレコードはi=0(つまり水平走査単位領域12a)の受信データ保存レコードであり、先頭から2番目のレコードはi=1(つまり水平走査単位領域12b)の受信データ保存レコードであり、先頭から3番目のレコードはi=2(つまり水平走査単位領域12c)の受信データ保存レコードであり、・・・・、最後のレコードはi=n(つまり水平走査単位領域12d)の受信データ保存レコードである。ここで、nは水平走査単位領域12a〜12dの総数(水平走査角度Σβの細分化数)である。
【0035】
各レコードの距離フィールド19bには、対応する水平走査単位領域の受信データから検出された目標までの距離が格納され、また、受信レベルフィールド19cには、その受信データの強さ(受信レベル:ここでは受光強度)が格納される。
【0036】
受信データの保存を完了すると、次に、変数iをカウントアップし(ステップS104)、変数iが水平走査角度Σβの細分化数nと同じか又は超えたか否かを判定する(ステップS105)。そして、その判定結果が否定(“NO”)であれば、まだ、1回の水平走査期間の途中であると判断して、再び、ステップS102以降を実行し、その判定結果が肯定(“YES”)であれば、1回の水平走査期間が完了したと判断して、図2のステップS1に進む。
【0037】
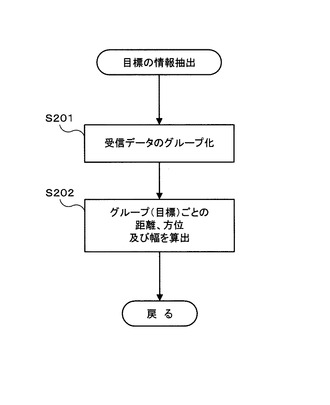
図5は、目標の情報抽出処理(図2のステップS200)の具体的な動作フローを示す図である。このフローにおいては、まず、受信データテーブル19に格納されている受信データをグループ化し(ステップS201)、次いで、グループごとの距離、方位及び幅を算出(ステップS202)した後、図2のステップS300に進む。ここで、グループごとの距離、方位及び幅とは、それぞれ目標の距離、目標の方位及び目標の幅のことである。
【0038】
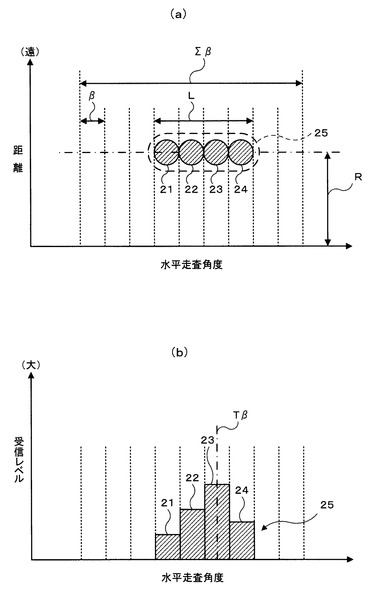
図6は、受信データのグループ化とグループごとの距離、方位及び幅の算出概念図である。この図において、(a)の縦軸は距離、横軸は水平走査角度であり、(b)の縦軸は受信レベル、横軸は水平走査角度である。(a)及び(b)の横軸上の等間隔な破線は、水平走査角度Σβをn個に細分化した各領域(水平走査単位領域12a〜12dという。)の境界を示している。
【0039】
今、1回の水平走査を完了したときの受信データテーブル19に保存されている受信データの情報が、(a)のようなものであったと仮定する。すなわち、一例として4個の受信データ21〜24が保存されており、それらの受信データ21〜24の距離がほぼ同一の値(R)であって、且つ、領域同士が密集しているものと仮定する。このような場合、それらの受信データ21〜24は一つの目標を表しているとみなすことができるので、これら4個の受信データを一つのグルーブ(すなわち目標25)とする。そして、その目標25の距離をR、その目標25の幅Lとして特定すると共に、(b)に示すように、その目標25を構成する4個の受信データ21〜24のうち、たとえば、最大の受信レベルを持つ領域の中心角度Tβを目標25の方位として特定する。
【0040】
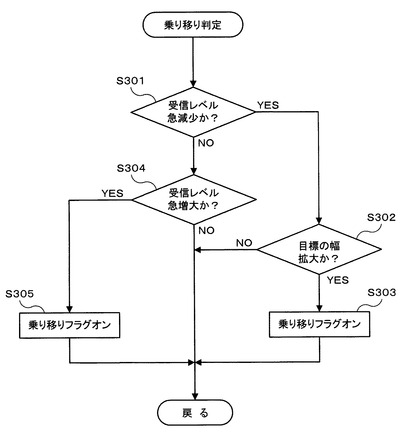
図7は、乗り移り判定処理(図2のステップS300)の具体的な動作フローを示す図である。このフローにおいては、まず、今回の水平走査期間の受信データの強さ(受信レベル)と、記憶部18の受信データテーブル18に記憶されていた先回または数回前の水平走査期間の受信データの強さ(受信レベル)とを比較して、受信レベルが急減少傾向にあるか(ステップS301)、または、急増大傾向にあるか(ステップS304)を判定し、急減少も急増大もしていなければ、そのまま、図2のステップS3に進む。
【0041】
一方、急減少傾向にあれば、目標の幅の拡大を判定(ステップS302)し、拡大している場合には、乗り移りフラグをオン(ステップS303)にした後、図2のステップS3に進む。目標の幅が拡大していない場合は、そのまま、図2のステップS3に進む。また、急増大傾向にある場合も、乗り移りフラグをオン(ステップS305)にした後、図2のステップS3に進む。
【0042】
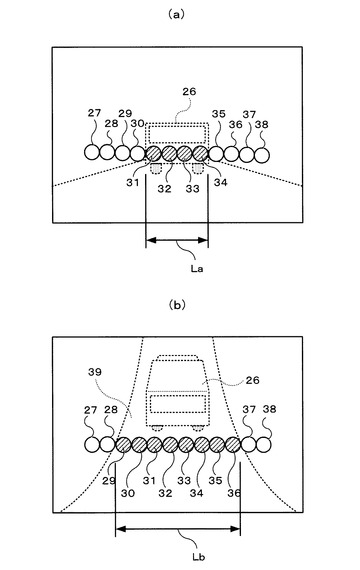
図8は、乗り移り判定処理における判定動作の説明図である。まず、(a)に示すように、自車10の前方に先行車26が存在する場合を想定する。そして、この先行車26に向けて、自車10の車載用レーダ装置11から水平走査単位領域ごとのレーザ光27〜38が照射されているものとする。図示の例では、ハッチングを付した4個のレーザ光31〜34が先行車26の後部にヒットしているので、この場合、これら4個のレーザ光31〜34の反射光が有効な受信データとして車載用レーダ装置11で受信されることになる。以下、このハッチングを付したレーザ光31〜34を受信データということにすると、これらの受信データ31〜34は、図6の4個の受信データ21〜24に対応する。したがって、受信データ31〜34から先行車26(目標25に相当)までの距離Rが得られ、受信データ31〜34を得た領域がなす角度から先行車26の幅Lが得られる。さらに、受信データ31〜34のうち最大受信レベルを持つデータの位置から先行車26の方位が得られる。
【0043】
さて、先行車26が急な坂道を上り始めたときの乗り移りは、(b)のように示される。この場合、自車10の車載用レーダ装置11から発射されたレーザ光27〜38の大部分が上り坂39の路面上に照射される。図示の例では、ハッチングを付した8個のレーザ光29〜36が上り坂39の路面上に照射されている。上記と同様に、これら8個のレーザ光29〜36を車載用レーダ装置11の受信データということにすると、この場合、受信データ29〜36の強さ(受信レベル)は、(a)の受信データ31〜34に比べて相当弱い。先行車26の後部にはナンバープレートなどの光をよく反射する部分があるのに対して、路面にはそのようなものが存在しないうえ、舗装面の微細な凹凸によって光の散乱が生じるからである。図7のステップS301の判定条件(受信レベルの急減少)は、このような先行車26の後部反射と路面反射との違いを区別するための条件である。ちなみに、発明者の実験によれば、路面からの反射強度は、車両からの反射強度の10%程度であった。
【0044】
先行車26の後部反射と路面反射との違いは、上記の条件(受信レベルの急減少)だけでなく、幅にも現れる。すなわち、先行車26の後部反射の幅Laは、特殊車両を除き、車両制限令(第三条第一項第一号参照)で規定された車両の最大幅2.5m以下であるところ、通常の路面幅Lbは、上記の車両最大幅を遙かに超える(たとえば、4mや5m程度)から、(b)に示すような、2.5mを遙かに超える受信データ29〜36の並び幅(幅Lb)が得られたとき(図7のステップS302の“YES”判定)には、上記の条件(受信レベルの急減少)と相まって、明らかに、先行車26から上り坂路面への間違った目標捕捉(乗り移り)が発生したものと判断することができる。
【0045】
また、先行車26が急な坂道を下り始めたときに、その下り坂の途中に光をよく反射する障害物(図11の道路案内板6など)が車線上に存在したときの乗り移りについても、原理的には、図7のステップS304の判定条件(受信レベルの急増大)によって判断することができる。これは、道路案内板6はガラス粉末を混入した塗料を用いて文字等が描かれており、このガラス粉末によって光がよく反射する(受信データの強度が急に高くなる)からである。ちなみに、発明者の実験によれば、看板からの反射強度は、車両からの反射強度の2倍程度であった。したがって、上記の条件(受信レベルの急増大)を満たした場合にも、明らかに、先行車26から道路案内板6への間違った目標捕捉(乗り移り)が発生したものと判断することができる。
【0046】
以上のとおりであるから、本実施の形態に係る車載用レーダ装置11によれば、先行車が急な坂道を上り始めたときや、光をよく反射する障害物(道路案内板等)が途中に設置され急な坂道を下り始めたときに発生する間違った目標認識(乗り移り)の発生を確実に回避することができる。
【0047】
なお、本発明の思想は、以上の説明に限定されず、その思想の範囲内において様々な発展例や変形例を含むことはもちろんであり、たとえば、以下のようにしてもよい。
【0048】
先行車26が急な坂道を上り始めたときの乗り移りを判定したときには、レーザ光12の垂直方向の照射角度を若干上向きに変更するようにしてもよい。また、先行車26が急な坂道を下り始めたときの乗り移りを判定したときには、レーザ光12の垂直方向の照射角度を若干下向きに変更するようにしてもよい。このようにすると、いずれも先行車26を再捕捉できるので好ましい。
【0049】
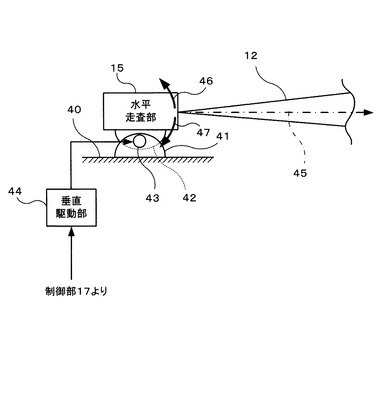
図9は、レーザ光の垂直方向変更機構の一例構成図である。この図において、(自車10の)車体の水平部位40には、基部41が固定されており、この基部41に揺動可能に軸支された台座42の上に、レーザ光12の発射面を右向きにした水平走査部15が一体的に取り付けられている。さらに、基部41には、モータ等のアクチュエータ43が取り付けられており、このアクチュエータ43は、垂直駆動部44からの駆動電流の極性と大きさに応じて所要量正転又は逆転し、垂直駆動部44は、制御部17(図1参照)からの制御指令に従って上記の駆動電流を発生する。このような構成によれば、アクチュエータ43の正転又は逆転により、台座42と一体の水平走査部15が揺動するので、この揺動に伴って、レーザ光12の光軸45が矢印46で示すように垂直方向上向き、又は、矢印47で示すように垂直方向下向きに変化する。なお、いうまでもなく、レーザ光の垂直方向変更機構は、図示のもの以外であっても当然構わない。要は、制御部17からの制御指令に従って、レーザ光12の光軸45を矢印46で示すように垂直方向上向きに変化させたり、又は、矢印47で示すように垂直方向下向きに変化させたりできるものであればよい。
【0050】
また、先行車が急な坂道を上り始めたときの乗り移りを判定するための条件として、以下のものを用いてもよい。
条件1:先回または数回前の受信レベルとの対比で今回の受信レベルが所定割合減少している。
条件2:その受信データが捕捉中の目標のデータである。
条件3:その受信データが近距離の目標のデータである。近距離とは、その目標が急停止したときに自車が追突するおそれがある程度の近い距離のことをいう。
条件4:車載用レーダ装置の水平視野(水平走査範囲)の全体にわたって目標が拡がっている。
条件5:目標の幅が一般的な路面幅相当であり、且つ、その幅が一般的な車両の幅を大きく超えている。
乗り移りの判定条件:条件1、条件2、条件3及び条件4を満たしたとき、または、条件1、条件2、条件3及び条件5を満たしたときに、先行車が急な坂道を上り始めたときの乗り移りが発生したと判定する。このようにすると、実用上、好ましいものとすることができる。
【0051】
また、先行車が、光をよく反射する障害物(道路案内板等)が途中に設置され急な坂道を下り始めたときの乗り移りを判定するための条件として、以下のものを用いてもよい。
条件1:先回または数回前の受信レベルとの対比で今回の受信レベルが所定倍増大している。
条件2:その受信データが捕捉中の目標のデータである。
条件3:その受信データが中・遠距離の目標のデータである。中・遠距離とは、急な坂道の途中に設置された光をよく反射する障害物(道路案内板等)に、車載用レーダ装置から発射されたレーザ光が到達する程度の充分な距離のことをいう。
乗り移りの判定条件:条件1、条件2及び条件3を満たしたときに、先行車が急な坂道を下り始めたときの乗り移りが発生したと判定する。このようにすると、実用上、好ましいものとすることができる。
【0052】
なお、以上の説明は、レーザ光を用いた車載用レーダ装置への適用であるが、これに限らず、電波等の他の電磁波媒体を用いた車載用レーダ装置に適用することもできる。
【図面の簡単な説明】
【0053】
【図1】実施の形態に係る車載用レーダ装置の全体構成図である。
【図2】制御部17で実行される制御プログラムの簡略的な動作フローを示す図である。
【図3】水平走査処理(図2のステップS100)の具体的な動作フローを示す図である。
【図4】受信データテーブル19の一例構造図である。
【図5】目標の情報抽出処理(図2のステップS200)の具体的な動作フローを示す図である。
【図6】受信データのグループ化とグループごとの距離、方位及び幅の算出概念図である。
【図7】乗り移り判定処理(図2のステップS300)の具体的な動作フローを示す図である。
【図8】乗り移り判定処理における判定動作の説明図である。
【図9】レーザ光の垂直方向変更機構の一例構成図である。
【図10】従来技術の不都合説明図(上り坂の場合)である。
【図11】従来技術の不都合説明図(下り坂の場合)である。
【符号の説明】
【0054】
10 自車
11 車載用レーダ装置
12 レーザ光(電磁波)
13 反射光(反射波)
14 送信部(送信手段)
15 水平走査部(走査手段)
16 受信部(受信手段)
17 制御部(比較手段、第1判定手段、第2判定手段)
18 記憶部(記憶手段)
43 アクチュエータ(変更手段)
【技術分野】
【0001】
本発明は、自動車等車両(以下、車両という。)に搭載される車載用レーダ装置に関する。
【背景技術】
【0002】
車載用レーダ装置は、電波や光などの電磁波を一塊り(パルス状)にして車両前方に発射し、その反射波に基づいて自車前方の障害物までの距離や方位などの情報を検知するいわゆるパルスレーダ方式のレーダ装置である。なお、電場と磁場には、時間的に一定の静的場と、時間的に変動して空間の遠方まで伝播する波動場とがあり、この波動場のことを「電磁波」という。電磁波の典型は電波であるが、光やX線なども電磁波である。
【0003】
ここで、車載用レーダ装置の送信部から発射されたパルス状の電磁波は、自車前方の障害物(以下、便宜的に先行車とする。)のボディ表面(または後部リフレクタ若しくはそれに相当する反射部位)で反射され、車載用レーダ装置の受信部で受信される。今、電磁波の発射時点から反射波の受信時点までの時間をTとするとき、先行車との車間距離Lは「L=(T×光の速度)÷2」で与えられる。また、自車(車載用レーダ装置の設置車両)を基準にした先行車の方位は、パルス状電磁波の発射方向で与えられ、たとえば、発射方向を0度(つまり、自車の進行方向)とすれば、先行車の方位も0度で与えられる。
【0004】
車載用レーダ装置の従来技術としては、たとえば、下記の特許文献1に記載されたものが知られている。このレーダ装置では、水平走査の一単位領域(自車前方の水平方向の監視範囲、つまり水平走査範囲を細分化した領域:以下、水平走査単位領域という。)ごとに、電磁波の一種であるレーザ光をパルス状にして発射し、先行車等の障害物からの反射波を受光するまでの時間から先行車までの距離を求め、また、当該反射波が得られたときの水平走査単位領域の走査角度(水平走査角度)から先行車の方位を求める。
【0005】
車載用レーダ装置は、以上の原理により、自車前方の障害物(先行車等)までの距離や方位を検出するものであるが、反射波の中には、本来、障害物として検出すべきではない、たとえば、路面からの反射波も含まれることがあり、この場合、路面を偽の障害物として誤検出してしまうという不都合がある。
【0006】
そこで、従来技術においては、先行車からの反射波と路面からの反射波の波形の違い、詳細には、先行車からの反射波の強さは路面からの反射波のそれよりも大きく、且つ、先行車からの反射波の継続時間(反射波形の裾野の拡がり)は路面からの反射波のそれよりも短いことに着目し、これらの違いに基づいて両者(先行車と路面)を区別する仕組みを開示している(特許文献1の段落〔0040〕及び図5参照)。
【0007】
【特許文献1】特開2003−42757号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献1に記載された従来の車載用レーダ装置にあっては、単に「先行車からの反射波と路面からの反射波の波形の違い」に基づいて、先行車と路面とを区別しているので、たとえば、以下のような状況においては、路面と先行車とを区別できないという不都合がある。
【0009】
図10は、従来技術の不都合説明図(上り坂の場合)である。この図において、(a)に示すように、自車1の前方を走行中の先行車2は、自車1の車載用レーダ装置3から発射されたレーザ光4で捕捉されているものとする。今、(b)に示すように、先行車2が急な坂道を上り始めたとき、車載用レーダ装置3から発射されたレーザ光4は、先行車2を外れて登坂路5を照射することになる。このような登坂路5(急な坂道)は、たとえば、屋内駐車場の入り口や、堤防等の登り口などによく見られる。
【0010】
さて、このように、レーザ光4が先行車2を外れて登坂路5を照射したとき、車載用レーダ装置3は、本来、先行車2をロスト(見失った)したと判断して目標捕捉を断念し、所要の処置(たとえば、運転者に対するロスト警告等)を講ずべきであるが、本件発明者らの実験(前記の従来技術を用いたもの)によれば、しばしば、登坂路5を先行車2と誤認し、目標捕捉を継続(先行車2→登坂路5)するという結果が得られた。
【0011】
これは、いわば、先行車2から登坂路5への間違った目標捕捉である。以下、この間違った目標捕捉のことを「乗り移り」ということにすると、このような乗り移りが発生すると、たとえば、車載用レーダ装置3の測定結果を車間距離制御システムに利用していた場合には、先行車2が急停止したと誤判定してしまい、その結果、自車1の急制動を余儀なくされるという不快な状況に陥る。
【0012】
かかる不本意な結果の原因は、乗り移りが発生する程度の急な坂道(登坂路5)の場合、その坂道で跳ね返った反射波と、先行車2からの反射波の波形とがかなり似ているためであると考えられる。
【0013】
なお、このような乗り移り問題は、急な上り坂だけでなく、下り坂でも発生することがある。
【0014】
図11は、従来技術の不都合説明図(下り坂の場合)である。この図において、(a)に示すように、自車1の前方を走行中の先行車2は、自車1の車載用レーダ装置3から発射されたレーザ光4で捕捉されているものとする。ここで、先行車2の前方には急な下り坂があって、しかも、その下り坂の途中に光をよく反射する固定障害物(典型的には道路案内板6)が設置されているものとし、且つ、その道路案内板6がレーザ光4の照射方向の延長線上に位置しているものとする。
【0015】
今、(b)に示すように、先行車2が急な坂道を下り始めたとき、車載用レーダ装置3から発射されたレーザ光4は、先行車2を外れて道路案内板6を照射することになり、図10と同様に、先行車2から道路案内板6への間違った目標捕捉(乗り移り)が発生する。このため、先行車2が急停止したと誤判定してしまい、やはり、自車1の急制動を余儀なくされるという不快な状況に陥る。この原因も、乗り移りが発生する程度の急な坂道の場合、その坂道の途中に設置された固定障害物(ここでは道路案内板6)で跳ね返った反射波と、先行車2からの反射波の波形とがかなり似ているためであると考えられる。
【0016】
そこで本発明の目的は、間違った目標捕捉(乗り移り)の発生を回避できる車載用レーダ装置を提供することにある。
【課題を解決するための手段】
【0017】
請求項1記載の発明は、電磁波を発信する送信手段と、前記送信手段が発信した電磁波を水平方向に走査する走査手段と、前記送信手段が発信した電磁波について、目標で反射したその反射波を受信する受信手段と、前記送信手段が電磁波を発信してから、前記受信手段が反射波を受信するまでの経過時間、および前記走査手段による電磁波の走査方向に基づいて、その電磁波を反射した目標の少なくとも位置と水平方向の幅を検出する車載用レーダ装置において、前期受信手段が受信した前記反射波の先回または数回前の強さを記憶すると共に、記憶した先回または数回前の反射波の強さと今回の強さとを比較する比較手段と、今回の反射波の強さが先回または数回前の強さに比べて急減少し、且つ、前記目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに、今回検出した前記目標は、先回または数回前から継続的に検出していた目標とは異なると判定する第1判定手段とを備えたことを特徴とする車載用レーダ装置である。
ここで、「急減少」について定義する。今、電磁波の反射効率に差がある二つの物体を想定し、それぞれを高反射物体、低反射物体ということにする。車両のボディはその表面がよく磨き上げられており、電磁波をよく跳ね返すので、「高反射物体」ということができ、それに対して、路面は表面が微細な凹凸で覆われているので、「低反射物体」ということができる。「急減少」とは、高反射物体からの反射波を受信しているときに、その反射波が低反射物体からの反射波に入れ替わったときの時間軸上における反射波の強さの変化のことをいう。したがって、急減少の“急”は定量的に示されない。“入れ替わり”が判別できる程度の特異な変化を呈していればよい。
請求項2記載の発明は、電磁波を発信する送信手段と、前記送信手段が発信した電磁波を水平方向に走査する走査手段と、前記送信手段が発信した電磁波について、目標で反射したその反射波を受信する受信手段と、前記送信手段が電磁波を発信してから、前記受信手段が反射波を受信するまでの経過時間、および前記走査手段による電磁波の走査方向に基づいて、その電磁波を反射した目標の少なくとも位置と水平方向の幅を検出する車載用レーダ装置において、前期受信手段が受信した前記反射波の先回または数回前の強さを記憶する記憶手段と、前記記憶手段に記憶されていた先回または数回前の反射波の強さと今回の強さとを比較する比較手段と、今回の反射波の強さが先回または数回前の強さに比べて急増大したときに、今回検出した前記目標は、先回または数回前から継続的に検出していた目標とは異なると判定する第第2判定手段とを備えたことを特徴とする車載用レーダ装置である。
ここで、「急増大」について定義する。今、前記の高反射物体よりも、さらに電磁波をよく反射する物体のことを「高々反射物体」ということにする。このような高々反射物体の例としては、ガラス粉末を混入した塗料で文字や図形等が描かれた道路案内板がある。「急増大」とは、前記の高反射物体(車両のボディ)からの反射波を受信しているときに、その反射波が高々反射物体からの反射波に入れ替わったときの時間軸上における反射波の強さの変化のことをいう。したがって、この急増大の“急”も定量的に示されない。“入れ替わり”が判別できる程度の特異な変化を呈していればよい。
請求項3記載の発明は、前記第1判定手段で間違った目標が判定されたときに、前記電磁波の垂直方向の照射角度を上向きに変更する変更手段を備えたことを特徴とする請求項1記載の車載用レーダ装置である。
請求項4記載の発明は、前記第2判定手段で間違った目標が判定されたときに、前記電磁波の垂直方向の照射角度を下向きに変更する変更手段を備えたことを特徴とする請求項2記載の車載用レーダ装置である。
【発明の効果】
【0018】
本発明によれば、反射波の強さが急減少し、且つ、目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに、今回検出した前記目標は、先回または数回前から継続的に検出していた目標とは異なると判定し、または、反射波の強さが急増大したときに、今回検出した前記目標は、先回または数回前から継続的に検出していた目標とは異なると判定するので、不本意な「乗り移り」の発生を回避できる車載用レーダ装置を提供することができる。
【発明を実施するための最良の形態】
【0019】
以下、本発明の実施の形態を、レーザ光を用いた車載用レーダ装置への適用を例にして、図面に基づいて説明する。なお、以下の説明における様々な細部の特定ないし実例および数値や文字列その他の記号の例示は、本発明の思想を明瞭にするための、あくまでも参考であって、それらのすべてまたは一部によって本発明の思想が限定されないことは明らかである。また、周知の手法、周知の手順、周知のアーキテクチャおよび周知の回路構成等(以下「周知事項」)についてはその細部にわたる説明を避けるが、これも説明を簡潔にするためであって、これら周知事項のすべてまたは一部を意図的に排除するものではない。かかる周知事項は本発明の出願時点で当業者の知り得るところであるので、以下の説明に当然含まれている。
【0020】
図1は、実施の形態に係る車載用レーダ装置の全体構成図である。この図において、自車10のフロント側、たとえば、フロントグリルに取り付けられた車載用レーダ装置11は、自車10の前方(進行方向)に向けてレーザ光12をパルス状にして照射し、その反射光13を受信(正確には受光であるが、ここでは便宜上、受信という。)して、その受信データから、自車10の前方に存在する先行車等の障害物(以下、目標ともいう。)を検出すると共に、その目標までの距離(自車10からの距離)や、方位(自車10の進行方向を基準にした方位)及び目標の幅(目標の水平方向の幅)などの情報を算出し、その情報を、自車10に搭載された他のシステム(たとえば、先行車追随システムなど)に出力するものである。
【0021】
ここで、“レーザ”とは、誘導放出による光増幅(Light Amplification by Stimulated Emission of Radiation)の略(LASER)であり、一般的に、単一波長の位相が揃ったコヒーレントな光であって、且つ、断面が円形に細く絞り込まれたビーム形状の光線のことと解されている。図示のレーザ光12もコヒーレントな光の点でこの解釈に従うものの、ビーム断面の形状についてはこれに従わない。詳細には、レーザ光12は水平方向の幅βに対して垂直方向の幅αが大きい、いわゆるファンビーム形状をなしている点で相違する。
【0022】
ファンビーム形状にした理由は、自車10の走行に伴う車体の上下運動(ピッチング運動)の影響を受け難くするためである。つまり、垂直方向の幅αも狭くしてしまうと、自車10のピッチングに伴ってレーザ光12が上下動し、目標を捕捉できなくなるからであり、ピッチングを考慮して垂直方向の幅αを若干大きくしておけば、このような不都合を回避できるからである。
【0023】
なお、レーザ光12の水平方向の幅βは、車載用レーダ装置11の水平方向の目標分解能を決定するので、できるだけ狭いことが望ましいものの、狭すぎる水平方向の幅βは、後述の水平走査単位領域の増加を招き、情報量の増加に伴い一回の水平走査(角度Σβ)の走査時間が長くなるので、両者(目標分解能と水平走査時間)の兼ね合いから適切に設定することになる。
【0024】
車載用レーダ装置11は、簡略的に示せば、送信部14と、水平走査部15と、受信部16と、制御部17と、記憶部18とを含んで構成される。
【0025】
送信部14は、制御部17からの送信指示に従ってレーザ光をパルス変調して水平走査部15に出力する。レーザ光の出力間隔(パルス間隔)は車載用レーダ装置11の最大探知距離を決定する。水平走査部15は、送信部14からのパルス状のレーザ光を水平走査して自車10の前方に照射する。水平走査は、所定の水平走査角度Σβ(自車10の前方の監視範囲を充分にカバーする角度であって、たとえば、30度程度の角度である。)を細分化した水平走査単位領域12a〜12dごとに、制御部17からの走査指示に従って順次に行われるようになっており、ここでは、各々の水平走査単位領域12a〜12dの角度をそれぞれβとしている。
【0026】
なお、水平走査部15におけるレーザ光の水平走査は、たとえば、回転多面鏡(ポリゴンミラー)を用いるなどの光学的手法によって行うことができるが、本発明の思想はこれに限定されない。要は、角度βの単位で且つ所定の角度Σβの範囲でレーザ光を水平走査できればよく、たとえば、角度βの単位でレーザダイオード等のレーザ光源をアレイ状に配列し、それらの光源を順次に駆動することにより、所定の角度Σβの範囲を水平走査するようにしてもよい。この場合、図示の送信部14と水平走査部15は区別されず、一体化されることになる。
【0027】
制御部17は、プログラム制御方式のマイクロプロセッサユニット(いわゆるコンピュータ)で構成されたもの、あるいは、全てまたは多くの論理部分がハードロジックで構成されたものであるが、以下、便宜的に前者の構成(コンピュータで構成されたもの)であるとすると、この制御部17は、後述の制御プログラムを実行することにより、送信部14や水平走査部15の動作を制御しつつ、受信部16の受信データを取り込んで記憶部18に記憶すると共に、その受信データに基づいて、自車10の前方に存在する先行車等の目標を検出して、その目標までの距離や方位、並びに、距離と方位から目標の幅などの情報を算出し、その情報を、自車10に搭載された他のシステム(たとえば、車間距離制御システムなど)に出力する。
【0028】
図2は、制御部17で実行される制御プログラムの簡略的な動作フローを示す図である。この制御プログラムでは、まず、一水平走査角度Σβの範囲を水平走査単位領域12a〜12dごとに順次に走査しながら、受信データを取得する(ステップS100)。この水平走査処理の具体的説明は後述する。
【0029】
角度Σβの一回の水平走査処理を完了すると、次に、その水平走査期間おいて取得した受信データの中に有効な受信データが含まれていたか否かを判定し(ステップS1)、含まれていなかった場合は、後述の受信データテーブル19(図4参照)をクリア(ステップS2)して、再び水平走査処理を実行する(ステップS100)。ここで、“有効な受信データ”とは、バックグラウンドノイズ等を考慮して設定された所定の閾値を超える大きさの受信データのことをいう。
【0030】
有効な受信データありを判定した場合は、次いで、その受信データに基づいて、目標の情報(目標までの距離、方位及び目標の幅等)を抽出する(ステップS200)。目標の情報抽出処理の具体的説明は後述する。
【0031】
次いで、本実施の形態の特徴である「乗り移り判定処理」(ステップS300)を実行し、その後、この乗り移り判定処理によって、乗り移りが判定されたときにオンとなるフラグ(乗り移りフラグ)を調べ(ステップS3)、フラグがオフであれば、不本意な乗り移りが発生していないと判断して、ステップS200で抽出した目標の情報を他のシステムに出力(ステップS4)してから、再び水平走査処理を実行する(ステップS100)一方、乗り移りフラグがオンであれば、不本意な乗り移りが発生していると判断して、乗り移りフラグをオフ(ステップS5)にした後、そのまま再び水平走査処理を実行する(ステップS100)。
【0032】
図3は、水平走査処理(図2のステップS100)の具体的な動作フローを示す図である。このフローにおいては、まず、水平走査単位領域12a〜12dを指定するための変数iを初期化(i=0)し(ステップS101)、次いで、i番目の水平走査単位領域を走査する(ステップS102)。ここで、水平走査単位領域12aは0番、水平走査単位領域12bは1番、水平走査単位領域12cは2番、・・・・、水平走査単位領域12dはn番であるものとする。現在、i=0であるので、水平走査単位領域12aが走査される。
【0033】
次いで、水平走査単位領域12aの走査中の受信データを、記憶部18内の受信データテーブルに保存する(ステップS103)。
【0034】
図4は、受信データテーブル19の一例構造図である。この図において、受信データテーブル19は、iフィールド19a、距離フィールド19b及び受信レベルフィールド19cを含む多数のレコードで構成されている。先頭のレコードはi=0(つまり水平走査単位領域12a)の受信データ保存レコードであり、先頭から2番目のレコードはi=1(つまり水平走査単位領域12b)の受信データ保存レコードであり、先頭から3番目のレコードはi=2(つまり水平走査単位領域12c)の受信データ保存レコードであり、・・・・、最後のレコードはi=n(つまり水平走査単位領域12d)の受信データ保存レコードである。ここで、nは水平走査単位領域12a〜12dの総数(水平走査角度Σβの細分化数)である。
【0035】
各レコードの距離フィールド19bには、対応する水平走査単位領域の受信データから検出された目標までの距離が格納され、また、受信レベルフィールド19cには、その受信データの強さ(受信レベル:ここでは受光強度)が格納される。
【0036】
受信データの保存を完了すると、次に、変数iをカウントアップし(ステップS104)、変数iが水平走査角度Σβの細分化数nと同じか又は超えたか否かを判定する(ステップS105)。そして、その判定結果が否定(“NO”)であれば、まだ、1回の水平走査期間の途中であると判断して、再び、ステップS102以降を実行し、その判定結果が肯定(“YES”)であれば、1回の水平走査期間が完了したと判断して、図2のステップS1に進む。
【0037】
図5は、目標の情報抽出処理(図2のステップS200)の具体的な動作フローを示す図である。このフローにおいては、まず、受信データテーブル19に格納されている受信データをグループ化し(ステップS201)、次いで、グループごとの距離、方位及び幅を算出(ステップS202)した後、図2のステップS300に進む。ここで、グループごとの距離、方位及び幅とは、それぞれ目標の距離、目標の方位及び目標の幅のことである。
【0038】
図6は、受信データのグループ化とグループごとの距離、方位及び幅の算出概念図である。この図において、(a)の縦軸は距離、横軸は水平走査角度であり、(b)の縦軸は受信レベル、横軸は水平走査角度である。(a)及び(b)の横軸上の等間隔な破線は、水平走査角度Σβをn個に細分化した各領域(水平走査単位領域12a〜12dという。)の境界を示している。
【0039】
今、1回の水平走査を完了したときの受信データテーブル19に保存されている受信データの情報が、(a)のようなものであったと仮定する。すなわち、一例として4個の受信データ21〜24が保存されており、それらの受信データ21〜24の距離がほぼ同一の値(R)であって、且つ、領域同士が密集しているものと仮定する。このような場合、それらの受信データ21〜24は一つの目標を表しているとみなすことができるので、これら4個の受信データを一つのグルーブ(すなわち目標25)とする。そして、その目標25の距離をR、その目標25の幅Lとして特定すると共に、(b)に示すように、その目標25を構成する4個の受信データ21〜24のうち、たとえば、最大の受信レベルを持つ領域の中心角度Tβを目標25の方位として特定する。
【0040】
図7は、乗り移り判定処理(図2のステップS300)の具体的な動作フローを示す図である。このフローにおいては、まず、今回の水平走査期間の受信データの強さ(受信レベル)と、記憶部18の受信データテーブル18に記憶されていた先回または数回前の水平走査期間の受信データの強さ(受信レベル)とを比較して、受信レベルが急減少傾向にあるか(ステップS301)、または、急増大傾向にあるか(ステップS304)を判定し、急減少も急増大もしていなければ、そのまま、図2のステップS3に進む。
【0041】
一方、急減少傾向にあれば、目標の幅の拡大を判定(ステップS302)し、拡大している場合には、乗り移りフラグをオン(ステップS303)にした後、図2のステップS3に進む。目標の幅が拡大していない場合は、そのまま、図2のステップS3に進む。また、急増大傾向にある場合も、乗り移りフラグをオン(ステップS305)にした後、図2のステップS3に進む。
【0042】
図8は、乗り移り判定処理における判定動作の説明図である。まず、(a)に示すように、自車10の前方に先行車26が存在する場合を想定する。そして、この先行車26に向けて、自車10の車載用レーダ装置11から水平走査単位領域ごとのレーザ光27〜38が照射されているものとする。図示の例では、ハッチングを付した4個のレーザ光31〜34が先行車26の後部にヒットしているので、この場合、これら4個のレーザ光31〜34の反射光が有効な受信データとして車載用レーダ装置11で受信されることになる。以下、このハッチングを付したレーザ光31〜34を受信データということにすると、これらの受信データ31〜34は、図6の4個の受信データ21〜24に対応する。したがって、受信データ31〜34から先行車26(目標25に相当)までの距離Rが得られ、受信データ31〜34を得た領域がなす角度から先行車26の幅Lが得られる。さらに、受信データ31〜34のうち最大受信レベルを持つデータの位置から先行車26の方位が得られる。
【0043】
さて、先行車26が急な坂道を上り始めたときの乗り移りは、(b)のように示される。この場合、自車10の車載用レーダ装置11から発射されたレーザ光27〜38の大部分が上り坂39の路面上に照射される。図示の例では、ハッチングを付した8個のレーザ光29〜36が上り坂39の路面上に照射されている。上記と同様に、これら8個のレーザ光29〜36を車載用レーダ装置11の受信データということにすると、この場合、受信データ29〜36の強さ(受信レベル)は、(a)の受信データ31〜34に比べて相当弱い。先行車26の後部にはナンバープレートなどの光をよく反射する部分があるのに対して、路面にはそのようなものが存在しないうえ、舗装面の微細な凹凸によって光の散乱が生じるからである。図7のステップS301の判定条件(受信レベルの急減少)は、このような先行車26の後部反射と路面反射との違いを区別するための条件である。ちなみに、発明者の実験によれば、路面からの反射強度は、車両からの反射強度の10%程度であった。
【0044】
先行車26の後部反射と路面反射との違いは、上記の条件(受信レベルの急減少)だけでなく、幅にも現れる。すなわち、先行車26の後部反射の幅Laは、特殊車両を除き、車両制限令(第三条第一項第一号参照)で規定された車両の最大幅2.5m以下であるところ、通常の路面幅Lbは、上記の車両最大幅を遙かに超える(たとえば、4mや5m程度)から、(b)に示すような、2.5mを遙かに超える受信データ29〜36の並び幅(幅Lb)が得られたとき(図7のステップS302の“YES”判定)には、上記の条件(受信レベルの急減少)と相まって、明らかに、先行車26から上り坂路面への間違った目標捕捉(乗り移り)が発生したものと判断することができる。
【0045】
また、先行車26が急な坂道を下り始めたときに、その下り坂の途中に光をよく反射する障害物(図11の道路案内板6など)が車線上に存在したときの乗り移りについても、原理的には、図7のステップS304の判定条件(受信レベルの急増大)によって判断することができる。これは、道路案内板6はガラス粉末を混入した塗料を用いて文字等が描かれており、このガラス粉末によって光がよく反射する(受信データの強度が急に高くなる)からである。ちなみに、発明者の実験によれば、看板からの反射強度は、車両からの反射強度の2倍程度であった。したがって、上記の条件(受信レベルの急増大)を満たした場合にも、明らかに、先行車26から道路案内板6への間違った目標捕捉(乗り移り)が発生したものと判断することができる。
【0046】
以上のとおりであるから、本実施の形態に係る車載用レーダ装置11によれば、先行車が急な坂道を上り始めたときや、光をよく反射する障害物(道路案内板等)が途中に設置され急な坂道を下り始めたときに発生する間違った目標認識(乗り移り)の発生を確実に回避することができる。
【0047】
なお、本発明の思想は、以上の説明に限定されず、その思想の範囲内において様々な発展例や変形例を含むことはもちろんであり、たとえば、以下のようにしてもよい。
【0048】
先行車26が急な坂道を上り始めたときの乗り移りを判定したときには、レーザ光12の垂直方向の照射角度を若干上向きに変更するようにしてもよい。また、先行車26が急な坂道を下り始めたときの乗り移りを判定したときには、レーザ光12の垂直方向の照射角度を若干下向きに変更するようにしてもよい。このようにすると、いずれも先行車26を再捕捉できるので好ましい。
【0049】
図9は、レーザ光の垂直方向変更機構の一例構成図である。この図において、(自車10の)車体の水平部位40には、基部41が固定されており、この基部41に揺動可能に軸支された台座42の上に、レーザ光12の発射面を右向きにした水平走査部15が一体的に取り付けられている。さらに、基部41には、モータ等のアクチュエータ43が取り付けられており、このアクチュエータ43は、垂直駆動部44からの駆動電流の極性と大きさに応じて所要量正転又は逆転し、垂直駆動部44は、制御部17(図1参照)からの制御指令に従って上記の駆動電流を発生する。このような構成によれば、アクチュエータ43の正転又は逆転により、台座42と一体の水平走査部15が揺動するので、この揺動に伴って、レーザ光12の光軸45が矢印46で示すように垂直方向上向き、又は、矢印47で示すように垂直方向下向きに変化する。なお、いうまでもなく、レーザ光の垂直方向変更機構は、図示のもの以外であっても当然構わない。要は、制御部17からの制御指令に従って、レーザ光12の光軸45を矢印46で示すように垂直方向上向きに変化させたり、又は、矢印47で示すように垂直方向下向きに変化させたりできるものであればよい。
【0050】
また、先行車が急な坂道を上り始めたときの乗り移りを判定するための条件として、以下のものを用いてもよい。
条件1:先回または数回前の受信レベルとの対比で今回の受信レベルが所定割合減少している。
条件2:その受信データが捕捉中の目標のデータである。
条件3:その受信データが近距離の目標のデータである。近距離とは、その目標が急停止したときに自車が追突するおそれがある程度の近い距離のことをいう。
条件4:車載用レーダ装置の水平視野(水平走査範囲)の全体にわたって目標が拡がっている。
条件5:目標の幅が一般的な路面幅相当であり、且つ、その幅が一般的な車両の幅を大きく超えている。
乗り移りの判定条件:条件1、条件2、条件3及び条件4を満たしたとき、または、条件1、条件2、条件3及び条件5を満たしたときに、先行車が急な坂道を上り始めたときの乗り移りが発生したと判定する。このようにすると、実用上、好ましいものとすることができる。
【0051】
また、先行車が、光をよく反射する障害物(道路案内板等)が途中に設置され急な坂道を下り始めたときの乗り移りを判定するための条件として、以下のものを用いてもよい。
条件1:先回または数回前の受信レベルとの対比で今回の受信レベルが所定倍増大している。
条件2:その受信データが捕捉中の目標のデータである。
条件3:その受信データが中・遠距離の目標のデータである。中・遠距離とは、急な坂道の途中に設置された光をよく反射する障害物(道路案内板等)に、車載用レーダ装置から発射されたレーザ光が到達する程度の充分な距離のことをいう。
乗り移りの判定条件:条件1、条件2及び条件3を満たしたときに、先行車が急な坂道を下り始めたときの乗り移りが発生したと判定する。このようにすると、実用上、好ましいものとすることができる。
【0052】
なお、以上の説明は、レーザ光を用いた車載用レーダ装置への適用であるが、これに限らず、電波等の他の電磁波媒体を用いた車載用レーダ装置に適用することもできる。
【図面の簡単な説明】
【0053】
【図1】実施の形態に係る車載用レーダ装置の全体構成図である。
【図2】制御部17で実行される制御プログラムの簡略的な動作フローを示す図である。
【図3】水平走査処理(図2のステップS100)の具体的な動作フローを示す図である。
【図4】受信データテーブル19の一例構造図である。
【図5】目標の情報抽出処理(図2のステップS200)の具体的な動作フローを示す図である。
【図6】受信データのグループ化とグループごとの距離、方位及び幅の算出概念図である。
【図7】乗り移り判定処理(図2のステップS300)の具体的な動作フローを示す図である。
【図8】乗り移り判定処理における判定動作の説明図である。
【図9】レーザ光の垂直方向変更機構の一例構成図である。
【図10】従来技術の不都合説明図(上り坂の場合)である。
【図11】従来技術の不都合説明図(下り坂の場合)である。
【符号の説明】
【0054】
10 自車
11 車載用レーダ装置
12 レーザ光(電磁波)
13 反射光(反射波)
14 送信部(送信手段)
15 水平走査部(走査手段)
16 受信部(受信手段)
17 制御部(比較手段、第1判定手段、第2判定手段)
18 記憶部(記憶手段)
43 アクチュエータ(変更手段)
【特許請求の範囲】
【請求項1】
電磁波を発信する送信手段と、
前記送信手段が発信した電磁波を水平方向に走査する走査手段と、
前記送信手段が発信した電磁波について、目標で反射したその反射波を受信する受信手段と、
前記送信手段が電磁波を発信してから、前記受信手段が反射波を受信するまでの経過時間、および前記走査手段による電磁波の走査方向に基づいて、その電磁波を反射した目標の少なくとも位置と水平方向の幅を検出する車載用レーダ装置において、
前期受信手段が受信した前記反射波の先回または数回前の強さを記憶する記憶手段と、
前記記憶手段に記憶されていた先回または数回前の反射波の強さと今回の強さとを比較する比較手段と、
今回の反射波の強さが先回または数回前の強さに比べて急減少し、且つ、前記目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに、今回検出した前記目標は、先回または数回前から継続的に検出していた目標とは異なると判定する第1判定手段と
を備えたことを特徴とする車載用レーダ装置。
【請求項2】
電磁波を発信する送信手段と、
前記送信手段が発信した電磁波を水平方向に走査する走査手段と、
前記送信手段が発信した電磁波について、目標で反射したその反射波を受信する受信手段と、
前記送信手段が電磁波を発信してから、前記受信手段が反射波を受信するまでの経過時間、および前記走査手段による電磁波の走査方向に基づいて、その電磁波を反射した目標の少なくとも位置と水平方向の幅を検出する車載用レーダ装置において、
前期受信手段が受信した前記反射波の先回または数回前の強さを記憶する記憶手段と、
前記記憶手段に記憶されていた先回または数回前の反射波の強さと今回の強さとを比較する比較手段と、
今回の反射波の強さが先回または数回前の強さに比べて急増大したときに、今回検出した前記目標は、先回または数回前から継続的に検出していた目標とは異なると判定する第第2判定手段と
を備えたことを特徴とする車載用レーダ装置。
【請求項3】
前記第1判定手段で間違った目標が判定されたときに、前記電磁波の垂直方向の照射角度を上向きに変更する変更手段を備えたことを特徴とする請求項1記載の車載用レーダ装置。
【請求項4】
前記第2判定手段で間違った目標が判定されたときに、前記電磁波の垂直方向の照射角度を下向きに変更する変更手段を備えたことを特徴とする請求項2記載の車載用レーダ装置。
【請求項1】
電磁波を発信する送信手段と、
前記送信手段が発信した電磁波を水平方向に走査する走査手段と、
前記送信手段が発信した電磁波について、目標で反射したその反射波を受信する受信手段と、
前記送信手段が電磁波を発信してから、前記受信手段が反射波を受信するまでの経過時間、および前記走査手段による電磁波の走査方向に基づいて、その電磁波を反射した目標の少なくとも位置と水平方向の幅を検出する車載用レーダ装置において、
前期受信手段が受信した前記反射波の先回または数回前の強さを記憶する記憶手段と、
前記記憶手段に記憶されていた先回または数回前の反射波の強さと今回の強さとを比較する比較手段と、
今回の反射波の強さが先回または数回前の強さに比べて急減少し、且つ、前記目標の水平方向の幅が一般的車両の水平方向の幅を超えたときに、今回検出した前記目標は、先回または数回前から継続的に検出していた目標とは異なると判定する第1判定手段と
を備えたことを特徴とする車載用レーダ装置。
【請求項2】
電磁波を発信する送信手段と、
前記送信手段が発信した電磁波を水平方向に走査する走査手段と、
前記送信手段が発信した電磁波について、目標で反射したその反射波を受信する受信手段と、
前記送信手段が電磁波を発信してから、前記受信手段が反射波を受信するまでの経過時間、および前記走査手段による電磁波の走査方向に基づいて、その電磁波を反射した目標の少なくとも位置と水平方向の幅を検出する車載用レーダ装置において、
前期受信手段が受信した前記反射波の先回または数回前の強さを記憶する記憶手段と、
前記記憶手段に記憶されていた先回または数回前の反射波の強さと今回の強さとを比較する比較手段と、
今回の反射波の強さが先回または数回前の強さに比べて急増大したときに、今回検出した前記目標は、先回または数回前から継続的に検出していた目標とは異なると判定する第第2判定手段と
を備えたことを特徴とする車載用レーダ装置。
【請求項3】
前記第1判定手段で間違った目標が判定されたときに、前記電磁波の垂直方向の照射角度を上向きに変更する変更手段を備えたことを特徴とする請求項1記載の車載用レーダ装置。
【請求項4】
前記第2判定手段で間違った目標が判定されたときに、前記電磁波の垂直方向の照射角度を下向きに変更する変更手段を備えたことを特徴とする請求項2記載の車載用レーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−115628(P2009−115628A)
【公開日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願番号】特願2007−289217(P2007−289217)
【出願日】平成19年11月7日(2007.11.7)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願日】平成19年11月7日(2007.11.7)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]