
遊星式回転―直線運動変換装置
【課題】太陽軸のストローク量を大きくすることができ、生産性、耐久性を向上させることができる遊星式回転―直線運動変換装置を提供する。
【解決手段】太陽歯車11及び螺旋凸条12を有する太陽軸1と、太陽軸1の太陽歯車11に噛み合う遊星歯車41を有すると共に、太陽軸1の螺旋凸条12に噛み合う螺旋溝42を有する遊星軸4と、遊星軸4の遊星歯車41に噛み合う内歯車21を有すると共に、遊星軸4の螺旋溝42に噛み合うナット2と、を備え、ナット2に対して太陽軸1を相対的に回転させると、遊星軸4が太陽軸1に対して太陽軸1の軸線方向に相対的に直線運動する遊星式回転―直線運動変換装置において、遊星軸4の遊星歯車41が形成される領域と、遊星軸4の螺旋溝42が形成される領域とを、遊星軸4の軸線方向に分離する。そして、太陽軸1の螺旋凸条12に、遊星軸4の遊星歯車41に噛み合う太陽歯車11を形成する。
【解決手段】太陽歯車11及び螺旋凸条12を有する太陽軸1と、太陽軸1の太陽歯車11に噛み合う遊星歯車41を有すると共に、太陽軸1の螺旋凸条12に噛み合う螺旋溝42を有する遊星軸4と、遊星軸4の遊星歯車41に噛み合う内歯車21を有すると共に、遊星軸4の螺旋溝42に噛み合うナット2と、を備え、ナット2に対して太陽軸1を相対的に回転させると、遊星軸4が太陽軸1に対して太陽軸1の軸線方向に相対的に直線運動する遊星式回転―直線運動変換装置において、遊星軸4の遊星歯車41が形成される領域と、遊星軸4の螺旋溝42が形成される領域とを、遊星軸4の軸線方向に分離する。そして、太陽軸1の螺旋凸条12に、遊星軸4の遊星歯車41に噛み合う太陽歯車11を形成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、遊星歯車機構を用いて回転運動を直線運動に変換する遊星式回転―直線運動変換装置に関する。
【背景技術】
【0002】
回転運動を直線運動に変換する遊星式回転―直線運動変換装置の一つとして、太陽軸と、太陽軸の周囲に環状の空間を空けて囲むナットと、太陽軸とナットとの間に配列される複数の遊星軸と、を備える遊星式回転―直線運動変換装置が知られている(特許文献1参照)。太陽軸は、はすば状太陽歯車及びねじ状太陽歯車の双方を有する。遊星軸も、はすば状遊星歯車及びねじ状遊星歯車を有する。ナットも、はすば状内歯車及びねじ状内歯車を有する。太陽軸のはすば状太陽歯車、遊星軸のはすば状遊星歯車及びナットのはすば状内歯車が第一の遊星歯車機構を構成し、太陽軸のねじ状太陽歯車、遊星軸のねじ状遊星歯車及びナットのねじ状内歯車が第二の遊星歯車機構を構成する。太陽軸のねじ状太陽歯車、遊星軸のねじ状遊星歯車及びナットのねじ状内歯車のピッチは同一であり、互いに噛み合う第二の遊星歯車機構を構成する。そして、第一の遊星歯車機構と第二の遊星歯車機構の歯数比を異ならせることによって、ナットの回転運動を太陽軸の直線運動に変換している。
【0003】
すなわち、特許文献1に記載の遊星式回転―直線運動変換装置において、遊星軸のはすば状遊星歯車に対する太陽軸のはすば状太陽歯車の歯数比を、遊星軸のねじ状遊星歯車に対する太陽軸のねじ状太陽歯車の条数比(歯数比)と異ならせている。その一方、遊星軸のはすば状遊星歯車に対するナットのはすば状内歯車の歯数比を、遊星軸のねじ状遊星歯車に対するナットのねじ状内歯車の条数比に一致させている。
【0004】
特許文献1に記載の遊星式回転―直線運動変換装置の作動原理は以下のとおりに説明されている。太陽軸に対してナットを相対的に回転させると、遊星軸が太陽軸の回りを自転しながら公転する。ここで、第一の遊星歯車機構と第二の遊星歯車機構の歯数比が異なっているので、太陽軸が軸線方向に移動しないと仮定すると、第一の遊星歯車機構の遊星軸の公転位置と、第二の遊星歯車機構の遊星軸の公転位置が周方向にずれる。しかし、遊星軸のはすば状遊星歯車とねじ状遊星歯車とは互いに結合されているので、はすば状遊星歯車の公転位置とねじ状遊星歯車の公転位置がずれることはできない。太陽軸が軸線方向に移動すると、はすば状遊星歯車の公転位置が変化するのに対し、ねじ状遊星歯車の公転位置が変化する。それゆえ、太陽軸が軸線方向に移動することになる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−56952号公報 (図1,図14参照)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、従来の遊星式回転―直線運動変換装置にあっては、太陽軸が遊星軸に対して軸線方向に相対的に直線運動し、太陽軸のねじ状太陽歯車が遊星軸のねじ状遊星歯車の領域から外れたとき、太陽軸のねじ状太陽歯車が遊星軸のはすば状遊星歯車に当たってしまうという課題がある。このため、太陽軸のストローク量が、太陽軸のねじ状太陽歯車が遊星軸のはすば状遊星歯車に当たらない範囲に制限されてしまう。さらに、遊星軸のねじ状遊星歯車の軸線方向の片側にのみはすば状遊星歯車を設け、片側でのみ歯車駆動させているので、遊星軸を傾けるような曲げモーメントが作用し易く、回転の伝達効率が悪くなるという課題もある。
【0007】
太陽軸のストローク量を大きくとり、かつ遊星軸に曲げモーメントが作用するのを防止するために、上記特許文献1の図14には、太陽軸の外周面に螺旋状に多数の凹みを配列し、遊星軸に太陽軸の凹みに嵌まる多数の凸部を配列した遊星式回転―直線運動変換装置も開示されている。
【0008】
しかし、太陽軸の外周面の螺旋状の多数の凹みは、事実上転造以外で製造することができないので、太陽軸の製造が困難になるという新たな課題が生ずる。たとえ転造ダイスによって太陽軸を製造できたとしても、加工誤差や焼き入れ後の歪等に起因する多数の凹みのピッチ誤差を修正することができない。多数の凹みを研削加工することは事実上不可能だからである。さらに、太陽軸の多数の凹みと遊星軸の多数の凸部とが間欠的に噛み合う構造であり、しかも多数の凹部及び多数の凸部が上述のように加工精度の出にくい転造加工により製造されるので、太陽軸の凹みと遊星軸の凸部との間にがた(すきま)が発生し易く、太陽軸の凹み及び遊星軸の凸部の耐久性に悪影響を及ぼすという課題もある。
【0009】
本発明は、従来の遊星式回転―直線運動変換装置の上記の課題を解決するためになされたものであり、太陽軸又はナットのストローク量を大きくすることができ、生産性、耐久性を向上させることができる実用的な遊星式回転―直線運動変換装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
以下、本発明について説明する。
上述した課題を解決する為に、本発明の一態様は、太陽歯車を有すると共に、螺旋凸条又は周方向凸条を有する太陽軸と、前記太陽軸の前記太陽歯車に噛み合う遊星歯車を有すると共に、前記太陽軸の前記螺旋凸条又は前記周方向凸条に噛み合う螺旋溝又は周方向溝を有する遊星軸と、前記遊星軸の前記遊星歯車に噛み合う内歯車を有すると共に、前記遊星軸の前記螺旋溝又は前記周方向溝に噛み合うナットと、を備え、前記太陽軸の前記太陽歯車、前記遊星軸の前記遊星歯車、及び前記ナットの前記内歯車が遊星歯車機構を構成し、前記ナットに対して前記太陽軸を相対的に回転させると、前記遊星軸が前記太陽軸に対して前記太陽軸の軸線方向に相対的に直線運動する遊星式回転―直線運動変換装置において、前記遊星軸の前記遊星歯車が形成される領域と、前記遊星軸の前記螺旋溝又は前記周方向溝が形成される領域とを、前記遊星軸の軸線方向に分離し、前記太陽軸の前記螺旋凸条又は前記周方向凸条の凸部に、前記遊星軸の前記遊星歯車に噛み合う前記太陽歯車を形成する遊星式回転―直線運動変換装置である。
【0011】
本発明の他の態様は、太陽歯車を有すると共に、螺旋凸条又は周方向凸条を有する太陽軸と、前記太陽軸の前記太陽歯車に噛み合う遊星歯車を有すると共に、前記太陽軸の前記螺旋凸条又は前記周方向凸条に噛み合う螺旋溝又は周方向溝を有する遊星軸と、前記遊星軸の前記遊星歯車に噛み合う内歯車を有すると共に、前記遊星軸の前記螺旋溝又は前記周方向溝に噛み合う螺旋凸条又は周方向凸条を有するナットと、を備え、前記太陽軸の前記太陽歯車、前記遊星軸の前記遊星歯車、及び前記ナットの前記内歯車が遊星歯車機構を構成し、前記太陽軸に対して前記ナットを相対的に回転させると、前記遊星軸が前記ナットに対して前記ナットの軸線方向に相対的に直線運動する遊星式回転―直線運動変換装置において、前記遊星軸の前記遊星歯車が形成される領域と、前記遊星軸の前記螺旋溝又は前記周方向溝が形成される領域とを、前記遊星軸の軸線方向に分離し、前記ナットの前記螺旋凸条又は前記周方向凸条の凸部に、前記遊星軸の前記遊星歯車に噛み合う前記内歯車を形成する遊星式回転―直線運動変換装置である。
【発明の効果】
【0012】
本発明の一態様によれば、太陽軸の螺旋凸条又は周方向凸条の凸部に、遊星軸の遊星歯車に噛み合う太陽歯車を形成するので、遊星軸が太陽軸に対し軸線方向に相対的に移動しても、太陽軸の螺旋凸条又は周方向凸条が遊星軸の遊星歯車に干渉することがなく、太陽軸の螺旋凸条又は周方向凸条と遊星軸の螺旋溝又は周方向溝との噛み合いが保たれ、太陽軸の太陽歯車と遊星軸の遊星歯車との噛み合いが保たれる。したがって、太陽軸に対するナットの軸線方向の相対的なストローク量を大きくすることができる。また、太陽軸を切削、転造のどちらでも製造することができるようになり、太陽軸を焼入れした後に研削加工等によりピッチを修正することもできるようになるので、太陽軸の生産性が向上する。さらに、遊星軸の遊星歯車が形成される領域と、遊星軸の螺旋溝又は周方向溝が形成される領域とを、遊星軸の軸線方向に分離しているので、遊星軸も切削、転造のどちらでも製造することができるようになり、遊星軸の製造も容易になる。
【0013】
本発明の他の態様によれば、ナットの螺旋凸条又は周方向凸条の凸部に、遊星軸の遊星歯車に噛み合う内歯車を形成するので、遊星軸がナットに対し軸線方向に相対的に移動しても、ナットの螺旋凸条又は周方向凸条が遊星軸の遊星歯車に干渉することがなく、ナットの螺旋凸条又は周方向凸条と遊星軸の螺旋溝又は周方向溝との噛み合いが保たれ、ナットの内歯車と遊星軸の遊星歯車との噛み合いが保たれる。したがって、ナットに対する太陽軸の軸線方向の相対的なストローク量を大きくすることができる。また、ナットを切削、転造のどちらでも製造することができるようになり、ナットを焼入れした後に研削加工等によりピッチを修正することもできるようになるので、ナットの生産性が向上する。さらに、遊星軸の遊星歯車が形成される領域と、遊星軸の螺旋溝又は周方向溝が形成される領域とを、遊星軸の軸線方向に分離しているので、遊星軸も切削、転造のどちらでも製造することができるようになり、遊星軸の製造も容易になる。
【図面の簡単な説明】
【0014】
【図1】本発明の第一の実施形態における遊星式回転−直線運動変換装置の斜視図
【図2】太陽軸の側面図
【図3】遊星軸の側面図
【図4】ナットの軸線に沿う断面図
【図5】太陽軸を1回転させたときの遊星軸の公転角度を示す模式図
【図6】総リードの算出方法の概念図
【図7】遊星軸に施したクラウニングを示す図
【図8】太陽軸の雄ねじ、遊星軸の雄ねじ、ナットの雌ねじの噛み合いを示す軸線に直交する断面図
【図9】平歯車のモジュールを変化させた遊星式回転−直線運動変換装置の比較図(モジュール0.68(a)及びモジュール0.42(b))
【図10】遊星軸の雄ねじと太陽軸の雄ねじの噛み合いを示す斜視図(モジュール0.68(a)及びモジュール0.42(b))
【図11】太陽軸の軸線に直交する断面図(モジュール0.68(a)及びモジュール0.42(b))
【図12】本発明の第二の実施形態における遊星式回転−直線運動変換装置の斜視図
【図13】上記遊星式回転−直線運動変換装置の断面図
【図14】ナットの断面図
【図15】本発明の第三の実施形態における遊星式回転−直線運動変換装置の斜視図
【図16】上記遊星式回転−直線運動変換装置の断面図
【図17】太陽軸の側面図
【図18】本発明の第一の実施形態の遊星式回転−直線運動変換装置を組み込んだアクチュエータの断面斜視図
【発明を実施するための形態】
【0015】
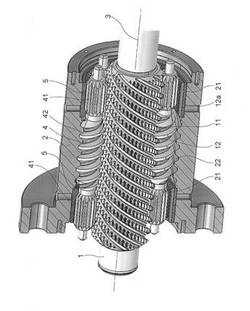
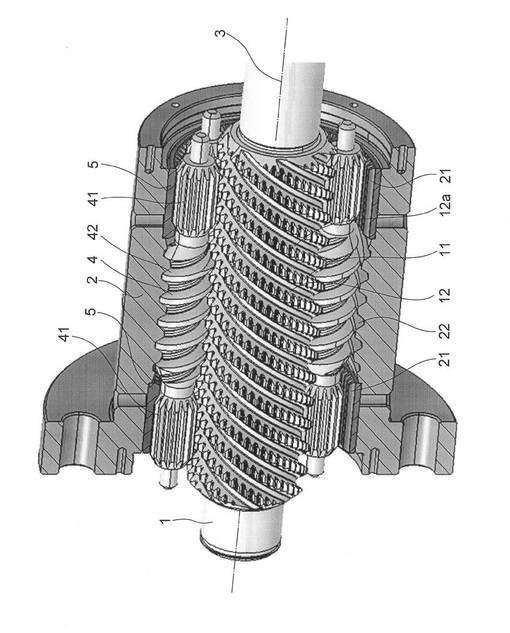
以下、添付図面に基づいて本発明の遊星式回転―直線運動変換装置を詳細に説明する。図1は、本発明の第一の実施形態における遊星式回転−直線運動変換装置の斜視図(内部構造を分かり易くするためにナットを半分に割った状態)を示す。遊星式回転−直線運動変換装置は、共通の軸線3に沿って延在する太陽軸1及び円環状のナット2を備える。太陽軸1とナット2との間の環状の空間には、これらに噛み合う複数の例えば九つの遊星軸4が配置される。遊星軸4の軸線は、太陽軸1及びナット2の軸線と平行である。九つの遊星軸4は太陽軸1の周りに周方向に均等間隔を空けて配列される。ナットに対して太陽軸1を相対的に回転すると、ナット2が軸線方向に直線運動する。
【0016】
太陽軸1には、太陽歯車としての平歯車11及び螺旋凸条としての雄ねじ12が形成される。遊星軸4には、遊星歯車としての平歯車41及び螺旋溝としての雄ねじ42が形成される。ナット2には、内歯車としての平歯車21及び螺旋凸条としての雌ねじ22が形成される。太陽軸1の太陽歯車、遊星軸4の遊星歯車、及びナット2の内歯車は、互いに噛み合い、遊星歯車機構を構成する。太陽歯車、遊星歯車、及び内歯車は、ねじれ角が25度以下の歯車であり、ねじれ角が0度の歯車、すなわち平歯車を含む。太陽軸1の螺線凸条、遊星軸4の螺旋溝及びナットの螺線凸条も、同一ピッチで互いに噛み合い、遊星ローラねじ機構を構成する。
【0017】
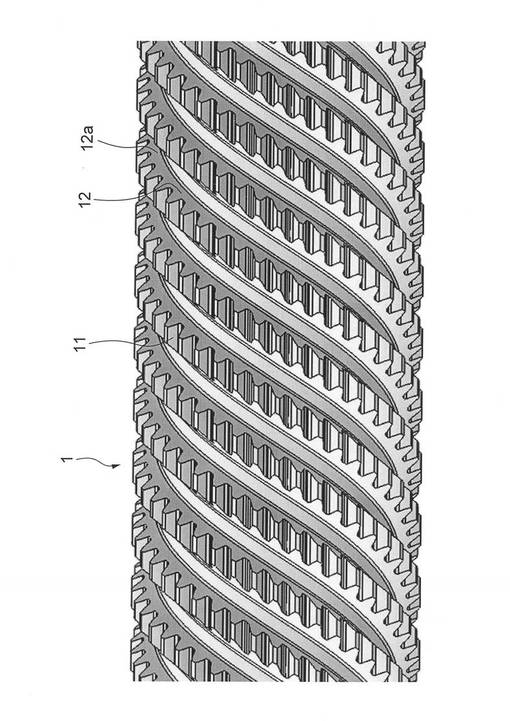
図2に示すように、太陽軸1の外周面には、螺旋凸条としての複数条の例えば八条の雄ねじ12が形成される。雄ねじ12は円筒状の外周面のつる巻き線に沿って形成され、所定のリード角を持つ。太陽軸1の軸線を含む平面による雄ねじ12の切り口の断面形状は台形である。もちろん、雄ねじ12の外径は雄ねじ12の谷の径よりも大きい。
【0018】
図1に示すように、太陽軸1の螺旋凸条としての雄ねじ12のピッチを遊星軸4の螺旋溝としての雄ねじ42のピッチに合わせれば、太陽軸1の雄ねじ12を遊星軸4の雄ねじ42に噛み合わせることができる。
【0019】
太陽軸1の雄ねじ12の凸部には、太陽歯車としての平歯車11が形成される。この平歯車11は、例えば一般的な平歯車と同様にインボリュート歯形に形成される。この平歯車11の全歯たけは、雄ねじ12のねじ山の高さよりも小さく、雄ねじ12には、平歯車11の歯底よりも内側に接触面12aが形成される。言い換えれば、平歯車11の歯底円は太陽軸1の雄ねじ12の谷の径よりも大きく設定される。この接触面12aに遊星軸4の雄ねじ42が接触する。
【0020】
太陽軸1の平歯車11には、遊星軸4の遊星歯車としての平歯車41が噛み合う。八条の雄ねじ12に形成される太陽軸1の平歯車11の位相は、太陽軸1の軸線方向からみて互いに一致している。太陽軸1の平歯車11の歯数をSz1,遊星軸4の平歯車41の歯数をPz1とおくと、太陽軸1の平歯車11と遊星軸4の平歯車41との間で、歯数Sz1,Pz1に応じた速比(回転数の比)で回転が伝達される。
【0021】
太陽軸1の平歯車11は太陽軸1の雄ねじ12の凸部に形成されている。このため、太陽軸1の平歯車11が形成される領域と、太陽軸1の雄ねじ12が形成される領域とが、太陽軸1の軸線方向に重なっている。遊星軸4が太陽軸1に対して太陽軸1の軸線方向に相対的に変位しても、太陽軸1の平歯車11が遊星軸4の平歯車41との噛み合いを維持できるよう、太陽軸1の平歯車11が形成される。
【0022】
太陽軸1の周囲には九つの遊星軸4が配置される。遊星軸4の配置個数は、太陽軸1及びナット2の平歯車11,21の歯数の和、並びに太陽軸1及びナット2の雄ねじ12,雌ねじ22の条数の和の、共通の約数である。
【0023】
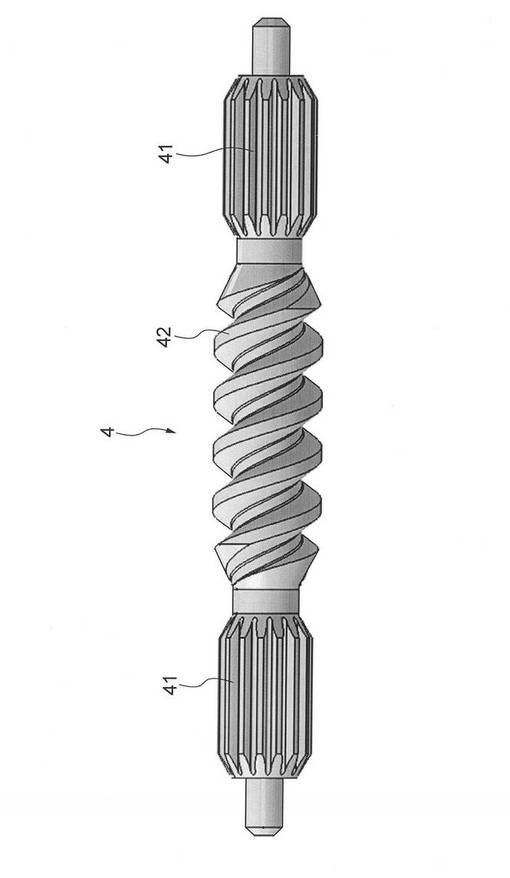
図3に示すように、各遊星軸4には、螺旋溝として例えば二条の雄ねじ42が設けられ、遊星歯車として一対の平歯車41が設けられる。二条の雄ねじ42は遊星軸4の軸線方向の中央部に形成される。一対の平歯車41は遊星軸4の雄ねじ42の軸線方向の両端部に形成される。遊星軸4の軸線方向から見た一対の平歯車41の位相は互いに一致している。遊星軸4の雄ねじ42の両端部に平歯車41を形成することで、遊星軸4を軸線方向の両端部で歯車駆動させることができ、遊星軸4が傾くのを防止できる。
【0024】
上記太陽軸1においては、雄ねじ12が形成される領域と平歯車11が形成される領域とが太陽軸1の軸線方向に重なっている。これに対し、遊星軸4においては、雄ねじ42と平歯車41とが独立していて、雄ねじ42が形成される領域と平歯車41が形成される領域とが遊星軸4の軸線方向に分離している。そして、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12に噛み合い、遊星軸4の平歯車41が太陽軸1の平歯車11に噛み合う。遊星軸4の雄ねじ42と平歯車41とを独立させることで、遊星軸4の雄ねじ42の谷底に平歯車41を形成する必要がなくなり、遊星軸4の製造が容易になり、また遊星軸4と太陽軸1とが間欠的に噛み合うのを防止することができる。
【0025】
遊星軸4及び太陽軸1の雄ねじ42,12及び平歯車41,11の噛み合いを保った状態で、なおかつ太陽軸1のストローク量を大きくするために、太陽軸1の雄ねじ12に平歯車11が形成される。太陽軸1の雄ねじ12に平歯車を形成すると、一見、太陽軸1の雄ねじ12が遊星軸4の雄ねじ42に間欠的に噛み合うように見える。しかし、遊星軸4の雄ねじ42は、太陽軸1の雄ねじ12の平歯車11の歯底円よりも内側で接触するので、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12に間欠的に噛み合うことはない。
【0026】
図1に示すように、各遊星軸4は、軸線方向の両端にて円環板状のキャリア(図示せず)に軸線の周りに回転可能に支持されている。キャリアはナット2に対し相対的に軸線の周りに自由に回転できるようにナット2に支持される。もちろん、キャリア2の内径は太陽軸1の外径よりも大きい。
【0027】
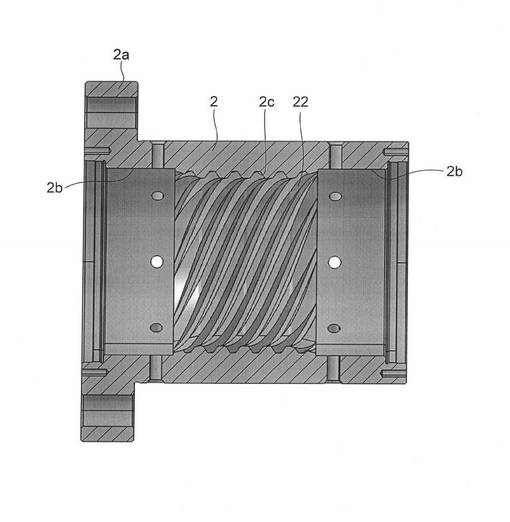
図4に示すように、ナット2は、略円筒形状に形成される。ナット2の軸線方向の一端部には、ナット2を他の部材に取り付けるためのフランジ2aが形成される。ナット2は図示しない他の部材に相対回転不能に連結される。ナット2の内周面の軸線方向の両端部には、内径を広げた一対のリング段差部2bが形成される。この一対のリング段差部2bに一対のリング歯車部材5が圧入等により固定される(図1参照)。一対のリング歯車部材5には、遊星軸4の一対の平歯車41と噛み合う一対の内歯車21が形成される。またナット2の中央部2cの内周面には、螺旋凸条として、遊星軸4の雄ねじ42と螺合する複数条の例えば十条の雌ねじ22が形成される。雌ねじ22はナット2の内周面のつる巻き線に沿う所定のリード角を持つ。ナット2の軸線を含む平面における雌ねじ22の切り口の断面形状は、台形である。
【0028】
上記遊星式回転−直線運動変換装置を組み立てるときは、まずナット2の内側に遊星軸4を環状に抱え込ませる。キャリアによって遊星軸4とナット2との位置関係をずれないように固定した段階で、太陽軸1を遊星軸4にねじ込む。
【0029】
図1に示すように、太陽軸1の平歯車11、遊星軸4の平歯車41及びナット2の内歯車21は共働して遊星歯車機構を構成しており、それぞれ太陽歯車、遊星歯車、内歯車として機能する。また太陽軸1の雄ねじ12、遊星軸4の雄ねじ42、ナット2の雌ねじ22は共働して遊星ローラねじ機構を構成しており、それぞれ螺線凸条、螺旋溝、螺線凸条として機能する。
【0030】
遊星ローラねじ機構を構成する太陽軸1の雄ねじ12、遊星軸4の雄ねじ42及びナット2の雌ねじ22は互いに噛み合っている。雄ねじ12及び雄ねじ42は互いに逆方向のリードを有し、雄ねじ42及び雌ねじ22は互いに同一方向のリードを有する。雄ねじ12、雄ねじ42、雌ねじ22のピッチは互いに等しい。そして、遊星軸4の雄ねじ42のリード角はナット2の雌ねじ22のリード角と相手方のネジリード基準ピッチ円において同一である。このため、遊星軸4がナット2の内側を自公転しても、遊星軸4がナット2に対して軸線方向にストロークすることはない。一方、遊星軸4の雄ねじ42のリード角は太陽軸1の雄ねじ12のリード角と異なる。このため、遊星軸4が太陽軸1の回りを自公転すると、遊星軸4が太陽軸1に対して軸線方向に直線運動する。したがって、ナット2も太陽軸1に対して軸線方向に直線運動する。
【0031】
遊星歯車機構を構成する太陽軸1の平歯車11、遊星軸4の平歯車41及びナット2の内歯車21も互いに噛み合う。この遊星式回転−直線運動変換装置においては、平歯車11、平歯車41、内歯車21の歯数は、それぞれ69,24,120である。
【0032】
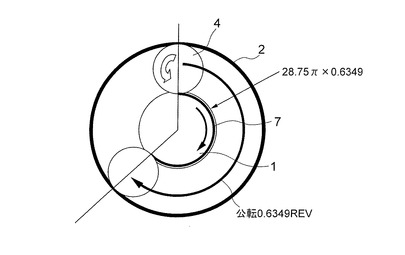
太陽軸1を1回転させたとき、ナット2に対する太陽軸1のストローク量(総リード)は以下のように算出される。図5に示すように、太陽軸1を1回転させると遊星軸4が太陽軸1の周囲を自転しながら公転する。遊星軸4の公転回転数である遊星軸公転減速比は、以下の式で求められる。
【0033】
【数1】

【0034】
具体的な数値を入れると、
【数2】
【0035】
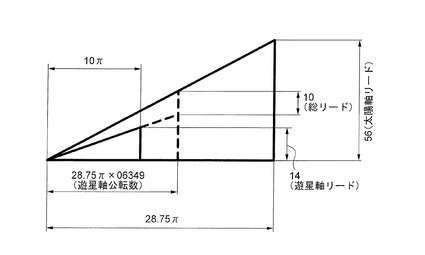
太陽軸1の雄ねじ12のピッチは7mm、条数は8なので、太陽軸1の1回転あたりのリードは7×8=56mmになる。図6に示すように、太陽軸1の雄ねじ12のSPC(太陽軸ネジリード基準ピッチ円)を28.75mmとすると、太陽軸1は1回転あたり、(28.75×π)の基準ピッチ円において56mm軸線方向に進む。
【0036】
一方、遊星軸4の雄ねじのピッチは7mm、条数は2なので、リードは7×2=14mmになる。遊星軸4の雄ねじのPPC(遊星軸ネジリード基準ピッチ円)を10mmにすると、遊星軸4は1回転あたり、(10×π)の基準ピッチ円において14mm進む。
【0037】
太陽軸1の周囲を遊星軸4が公転する。太陽軸1を1回転させたときの接触部7(図5参照)の長さは、上記遊星軸公転減速比から28.75×π×0.6349となる。そのときの太陽軸1のリードと遊星軸4のリードの差分が総リードLとなる。
【0038】
すなわち、総リードLは、太陽軸1のリード−遊星軸4のリードであり、
L=56×0.6349−28.75×π×0.6349/(10×π)×14=10mmとなる。
【0039】
一般式で表わすと、総リードLは以下の計算式で表わされる。
【数3】
【0040】
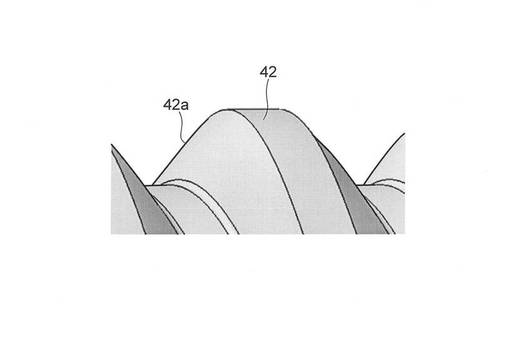
図7に示すように、遊星軸4の雄ねじ42には、クラウニング42aが施される。クラウニング42aは、遊星軸4の軸線を含む断面で見たとき、又は遊星軸4の雄ねじ42のリードに直角な断面で見たとき、円弧形状に形成される。クラウニング42aを施すことによって、太陽軸1の雄ねじ12と遊星軸4の雄ねじ42とを点接触させることができる。遊星軸4と太陽軸1との接触点は、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12に対して滑らずに転がり運動する点の近傍に配置される。このようにすることで、太陽軸1の雄ねじ12と遊星軸4の雄ねじ42との間の差動滑りを低減することができ、回転の伝達効率を向上させることができる。
【0041】
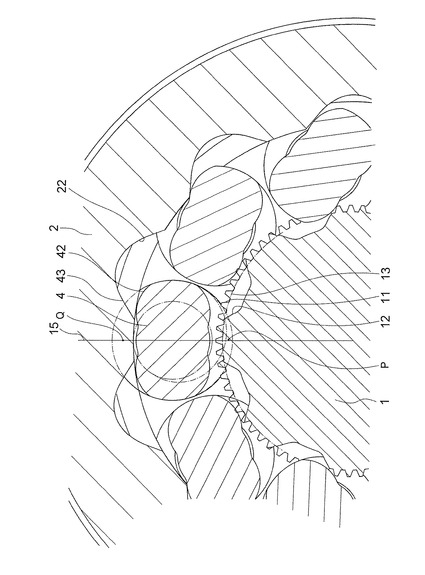
図8に示すように、太陽軸1の軸線方向からみて、遊星軸4の雄ねじ42の外径円43の一部は太陽軸1の平歯車11の歯底円13よりも内側に入り込む。そして、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12に接触する点Pは、太陽軸1の雄ねじ12の接触面12a(太陽軸1の平歯車11の歯底円13よりも内側、図10参照)である。太陽軸1に軸線方向の荷重がかかると、太陽軸1の雄ねじ12及び遊星軸4の雄ねじ42の接触点Pが弾性変形し、接触領域が広くなる。太陽軸1の軸線方向の荷重は、弾性変形した太陽軸1の雄ねじ12の接触面12aが受けることになる。遊星軸4の雄ねじ42を太陽軸1の雄ねじ12の接触面12aに接触させることで、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12に形成される平歯車11にのみ接触することを避けることができる。このため、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12の平歯車11に間欠的に当たってしまう(すなわち遊星軸4の雄ねじ42が太陽軸1の雄ねじ12の平歯車11に当たっているときと当たってないときが生ずる)のを防止することができ、遊星軸4の雄ねじ42を太陽軸1の雄ねじ12に安定して接触させることができる。また、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12の平歯車11に間欠的に当たるのを防止できるので、せん断応力や曲げモーメントに強いねじになる。
【0042】
本実施形態においては、遊星軸4の雄ねじ42を太陽軸1の雄ねじ12の接触面12aに接触させたいがゆえ、遊星軸4の雄ねじ42を太らせている。遊星軸4の雄ねじ42を極端に太らせると隣の遊星軸4に干渉する。このため遊星軸4の配置個数を九つに減らしている。
【0043】
遊星軸4の雄ねじ42のリード角は、太陽軸1の雄ねじ12のリード角と異なる。このため厳密にいうと、遊星軸4の雄ねじ42と太陽軸1の雄ねじ12との接触点Pは、太陽軸1の中心と遊星軸4の中心とを結んだ線15から僅かにずれている。一方、遊星軸4の雄ねじ42のリード角はナット2の雌ねじ22のリード角と等しい。このため、遊星軸4の雄ねじ42とナット2の雌ねじ22との接触点Qは、太陽軸1の中心と遊星軸4の中心とを結んだ線15上に位置する。
【0044】
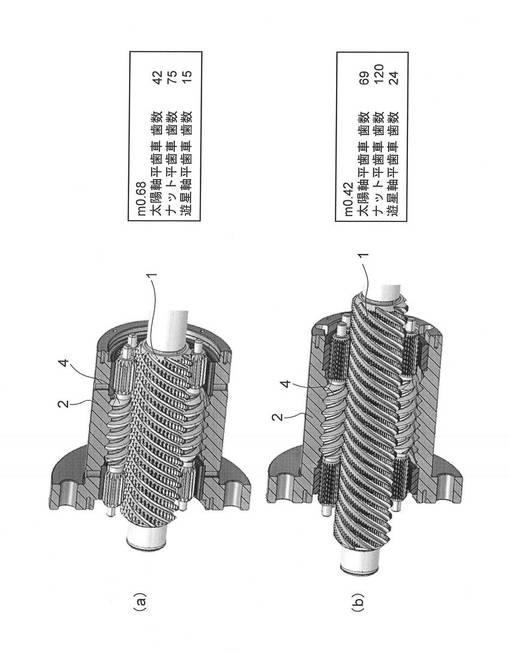
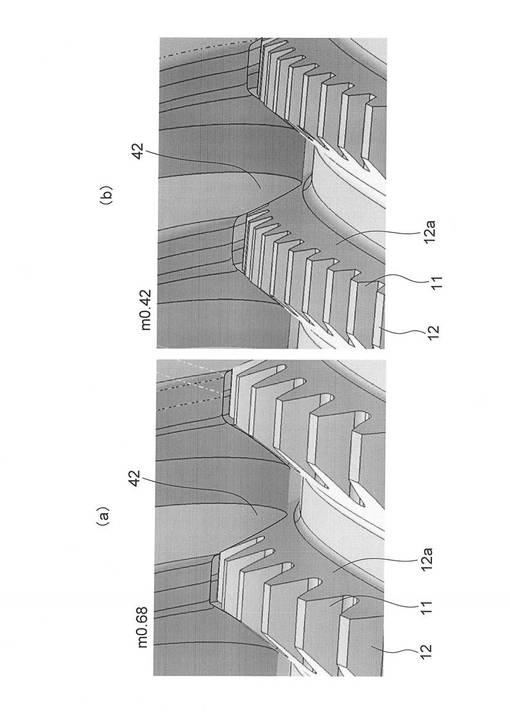
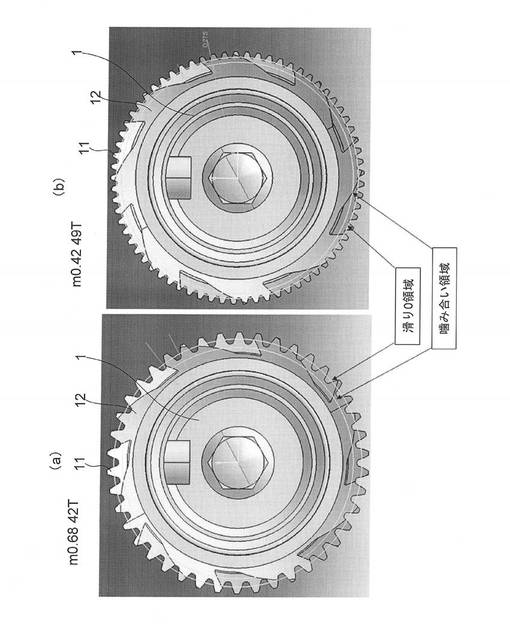
図9は、平歯車のモジュールを変化させた例を示す。平歯車の速比及び噛み合い位相を維持したまま、平歯車のモジュールを例えば0.68から0.42に小さくすると、太陽軸1の雄ねじ12の平歯車11の円ピッチが小さくなる。図10に示すように、平歯車11のモジュールを0.68から0.42に小さくすると、太陽軸1の雄ねじ12に形成される平歯車11の全歯たけを小さくすることができ、雄ねじ12の接触面12aの半径方向の厚みを厚くすることができる。このため、遊星軸4の雄ねじ42を太陽軸1の雄ねじ12の接触面12aに接触させ易くなる。さらに、図11に示すように、太陽軸1の平歯車11の全歯たけを小さくできる分、太陽軸1の雄ねじ12の噛み合いピッチ円(図中噛み合い領域で示す)を大きくでき、当該噛み合いピッチ円を滑りが生じない滑り0領域に近付けることができ、回転の伝達効率を向上させることができる。噛み合いピッチ円とは、太陽軸1の雄ねじ12と遊星軸4の雄ねじ42とが噛みあっている点上の軌跡である。滑り0領域とは、太陽軸1の雄ねじ12と遊星軸4の雄ねじ42とに滑りが生じない点上の軌跡である。自公転する遊星軸4が描く螺旋状の軌道長さと、太陽軸1の螺旋状の軌道長さとが一致する領域が滑り0領域である。
【0045】
図1に示すように、遊星軸4の雄ねじ42はナット2の雌ねじ22に対しても、差動滑りが発生しないよう転がり接触する点の近傍で接触する。遊星軸4の雄ねじ42をオーバーサイズにすることにより予圧を与えることが可能になり、バックラッシュをなくすことができる。
【0046】
上記の実施形態においては、遊星軸4が軸線方向に太陽軸1に対し相対的に変位する例について説明した。
【0047】
これとは逆に遊星軸が軸線方向にナットに対し相対的に変位してもよい。この場合には、螺旋溝を構成するナットの螺旋状の雌ねじの凸部に、内歯車を構成する歯車が設けられる。遊星軸には、螺旋溝を構成する雄ねじ、及びこの雄ねじの軸線方向の両側に遊星歯車を構成する一対の平歯車が遊星軸の軸線方向に分かれた状態で設けられる。太陽軸には、螺線凸条を構成する雄ねじ、及びこの雄ねじの軸線方向の両側に太陽歯車を構成する一対の平歯車が軸線方向に分かれた状態で設けられる。この例によれば、遊星軸がナットに対してストロークしてもナットのねじ状内歯車が遊星軸の遊星歯車に干渉することがない。したがって、ナットに対する太陽軸の軸線方向の相対的なストローク量を大きくすることができる。
【0048】
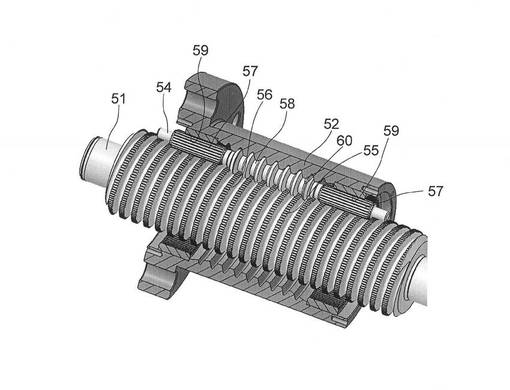
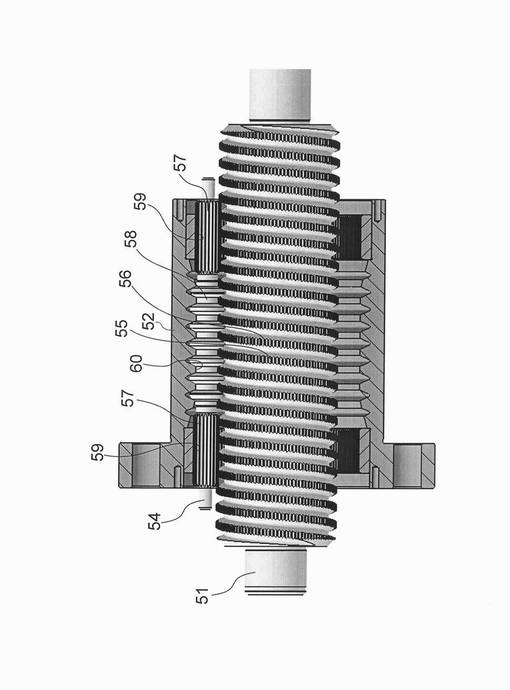
図12ないし図14は、本発明の第二の実施形態における遊星式回転−直線運動変換装置を示す。図12は、遊星式回転−直線運動変換装置の斜視図(内部構造を分かり易くするためにナット52を半分に割った状態)を示し、図13は、遊星式回転−直線運動変換装置の断面図を示す。この実施形態の遊星式回転−直線運動変換装置も、太陽軸51と、太陽軸51の周囲に配置される複数の遊星軸54と、太陽軸51及び遊星軸54を囲む環状のナット52と、を備える。
【0049】
太陽軸51には、太陽歯車としての平歯車55及び螺旋凸条としての雄ねじ56が形成される。第一の実施形態の遊星式回転−直線運動変換装置と同様に、太陽軸51の平歯車55は、雄ねじ56の凸部に形成される。雄ねじ56は所定のリード角を持つ。
【0050】
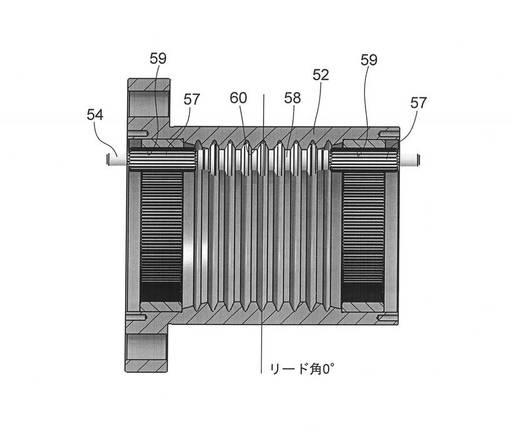
遊星軸54には、遊星歯車としての一対の平歯車57が形成され、一対の平歯車57の間に周方向溝58が形成される。周方向溝58は、周方向に伸びる単一のリング状溝を遊星軸4の軸線方向に多数配列してなる。遊星軸54の平歯車57が太陽軸51の平歯車55に噛み合い、遊星軸54の周方向溝58が太陽軸51の雄ねじ56に噛み合う。図14のナット52の断面図に示すように、遊星軸54の周方向溝58のリード角は0度である。遊星軸54の周方向溝58のピッチは太陽軸51の雄ねじ56のピッチと同一である。
【0051】
図12及び図13に示すように、ナット52には、内歯車としての一対の平歯車59が形成され、一対の平歯車59の間に周方向凸条60が形成される。ナット52の一対の平歯車59が遊星軸54の一対の平歯車57に噛み合い、ナット52の周方向凸条60が遊星軸54の周方向溝58に噛み合う。図14に示すように、ナット52の周方向凸条60も、周方向に伸びる単一のリング状凸条を複数配列してなる。周方向凸条60のリード角は0度である。
【0052】
太陽軸51の平歯車55、遊星軸54の平歯車57、及びナット52の平歯車59が、遊星歯車機構を構成する。ナット52に対して太陽軸51を相対的に回転させると、遊星軸54が太陽軸51の周囲を自転しながら公転する。
【0053】
太陽軸51の雄ねじ56、遊星軸54の周方向溝58及びナット52の周方向凸条60は、互いに噛み合っている。上記第一の実施形態の遊星式回転−直線運動変換装置と異なり、遊星軸54の周方向溝58及びナット52の周方向凸条60のリード角は0度であるが、第一の実施形態と同様に、太陽軸51の周囲を遊星軸54が自転しながら公転すると、太陽軸51の雄ねじ56のリード角と遊星軸54の周方向溝58のリード角との差により、遊星軸54及びナット52が軸線方向に移動する。
【0054】
この実施形態の遊星式回転−直線運動変換装置によれば、以下の効果が得られる。1.ナット52の周方向凸条60及び遊星軸54の周方向溝58が螺旋状になっていないので、製作精度が向上する(加工精度は、螺旋状溝を加工する時のインデックス精度に左右されずに、加工機の送り精度のみに依存する)。2.ナット52の周方向凸条60及び遊星軸54の周方向溝58のリード角が0であるので、リード誤差による相対変位が生じない。3.ナット52の周方向凸条60及び遊星軸54の周方向溝58のリード角が0であるので、ねじの条数は0条と定義され、遊星軸54の配置数の自由度が増し、強度が得やすい。4.太陽軸51のねじの条数を少なく設計できるので、精度が得やすい。5.正効率を下げずに逆効率を極めて小さく設計できる。
【0055】
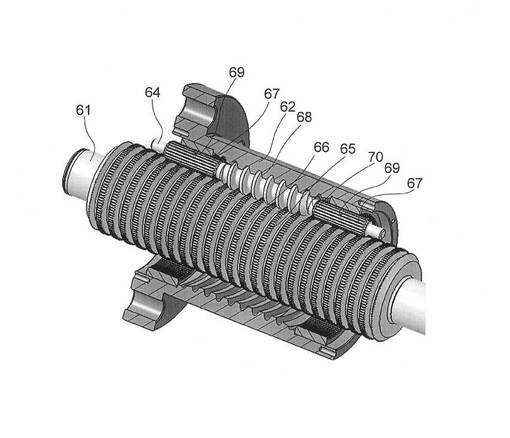
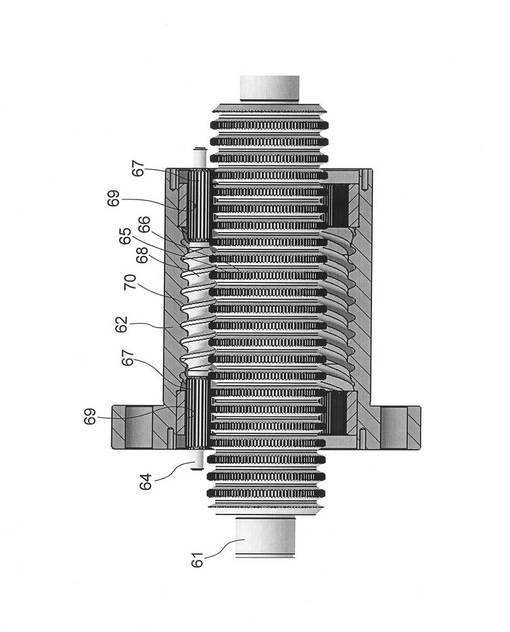
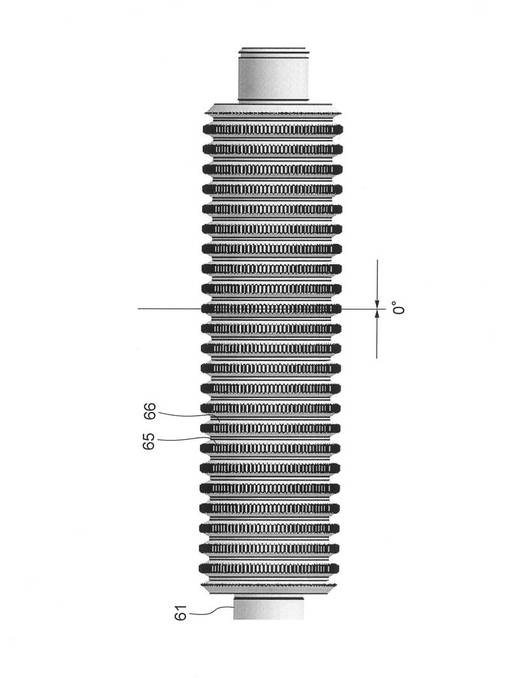
図15ないし図17は、本発明の第三の実施形態における遊星式回転−直線運動変換装置を示す。図15は、遊星式回転−直線運動変換装置の斜視図を示し、図16は、断面図を示す。この実施形態の遊星式回転−直線運動変換装置も、太陽軸61と、太陽軸61の周囲に配置される複数の遊星軸64と、太陽軸61及び遊星軸64を囲む環状のナット62と、を備える。
【0056】
太陽軸61には、太陽歯車としての平歯車65及び周方向凸条66が形成される。図17の太陽軸61の側面図に示すように、周方向凸条66は、周方向に伸びる単一の凸条を太陽軸61の軸線方向に複数配列してなる。周方向凸条66のリード角は0度である。太陽軸61の平歯車65は、周方向凸条66の凸部に形成される。
【0057】
図15に示すように、遊星軸64には、遊星歯車としての一対の平歯車67が形成され、及び一対の平歯車67間に螺旋溝としての雄ねじ68が形成される。遊星軸64の一対の平歯車67が太陽軸61の平歯車65に噛み合い、遊星軸64の雄ねじ68が太陽軸61の周方向凸条66に噛み合う。遊星軸64の雄ねじ68のピッチは、太陽軸61の周方向凸条66のピッチと同一である。遊星軸64の雄ねじ68は所定のリード角を持つ。
【0058】
ナット62には、内歯車としての平歯車69及び螺旋凸条としての雌ねじ70が形成される。ナット62の平歯車69が遊星軸64の平歯車67に噛み合い、ナット62の雌ねじ70が遊星軸64の雄ねじ68に噛み合う。ナット62の雌ねじ70は遊星軸64の雄ねじ69と逆方向の同一のリード角を持つ。
【0059】
太陽軸61の平歯車65、遊星軸64の平歯車67、及びナット62の平歯車69が遊星歯車機構を構成する。ナット62に対して太陽軸61を回転させると、遊星軸64がナット62の周囲を自転しながら公転する。
【0060】
太陽軸61の周方向凸条66、遊星軸64の雄ねじ68及びナット62の雌ねじ70は互いに噛み合っている。上記第一の実施形態の遊星式回転−直線運動変換装置と異なり、太陽軸61の周方向凸条66のリード角は0度であるので、太陽軸61の周方向凸条66がねじ状歯車を構成する訳ではない。しかし、太陽軸61の周囲を遊星軸64が自転しながら公転すると、太陽軸61の周方向凸条66のリード角と遊星軸64の雄ねじ68のリード角との差により、太陽軸61が軸線方向に移動する。
【0061】
この実施形態の遊星式回転−直線運動変換装置によれば、以下の効果が得られる。1.太陽軸61の周方向凸条66が螺旋状になっていないので、製作精度が向上する。2.太陽軸61の周方向凸条66のリード角が0であるので、リード誤差による相対変位が生じない。3.太陽軸61の周方向凸条66のリード角が0であるので、ねじの条数は0条と定義され、遊星軸64の配置数の自由度が増し、強度が得やすい。4.太陽軸61のねじの条数を0に設計できるので、精度が得やすい。5.正効率を下げずに逆効率を極めて小さく設計できる。
【0062】
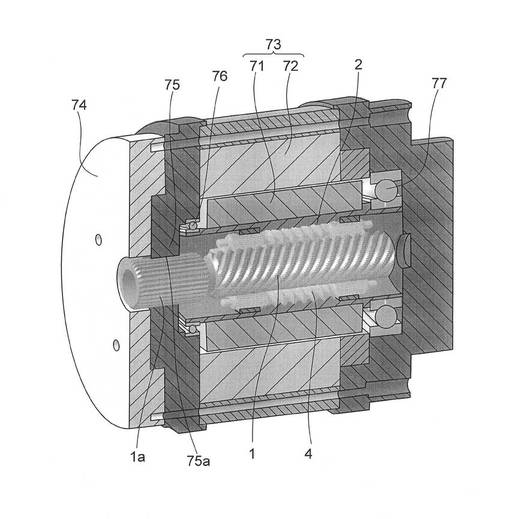
図18は、本発明の第一の実施形態の遊星式回転−直線運動変換装置を組み込んだアクチュエータを示す。このアクチュータにおいては、中空モータ73によってナット2を回転させ、これにより軸線方向に移動する太陽軸1がハウジング74から出入りするようになっている。
【0063】
ナット2はその前後方向の両端部がベアリング76,77に回転可能に支持されている。ベアリング76,77はハウジング74の内部に組み込まれている。
【0064】
モータ73はハウジング74に一体的に組み込まれている。モータ73のロータとなる永久磁石71がナットの外周面に固定される。モータ73のステータとなる三相コイル72は、永久磁石71を取り囲んだ状態でハウジング74に一体的に固定される。
【0065】
ハウジング74の前部壁75には、太陽軸1が軸線の回りを回転するのを防止し、かつ太陽軸1がその軸線方向に直線運動するのを許容するスプライン溝75aが形成される。太陽軸1には、ハウジング75のスプライン溝75aに係合するスプライン凸条1aが形成される。これらのスプライン溝75a及びスプライン凸条1aが回り止め機構を構成する。
【0066】
モータ73がナット2を回転させると、遊星軸4が太陽軸1の周囲を自転しながら公転する。遊星軸4の自転及び公転に伴い、遊星軸4に噛み合う太陽軸1が軸線方向に移動する。太陽軸1の軸線の回りの回転は回り止め機構1a,75aによって制限されているので、太陽軸1がナット2と一緒に回転することはない。
【0067】
本実施形態のアクチュエータによれば、逆効率が低い遊星式回転−直線運動変換装置を組み込んでいるので、太陽軸1の軸方向位置を保持するためのモータ73のパワーを小さくすることができる。太陽軸1に作用する軸方向の荷重に逆らって、太陽軸1の位置を保持するためには、太陽軸1の位置を保持している間、モータ73がトルクを発生し続けなければならない。遊星式回転−直線運動変換装置はボールねじよりも逆効率(軸方向の荷重を回転方向のトルクに変える効率)が低いので、太陽軸1の位置を保持するために必要なトルクはボールねじに比べて極端に小さくてすむ。したがって、モータ73の容量、寸法を小さくすることができ、モータ73の発熱を抑えることができる。
【0068】
なお、本発明は上記実施形態に具現化されるのに限られることはなく、本発明の要旨を変更しない範囲で様々に変更できる。上記実施形態で示された歯数等の設計諸元は一例であり、総リード、軸線方向荷重に応じて適宜変更することができる。
【符号の説明】
【0069】
1,51,61…太陽軸,2,52,62…ナット,3…軸線,4,54,64…遊星軸,11,55,65…太陽軸の平歯車(太陽歯車),12,56…太陽軸の雄ねじ(太陽軸の螺旋凸条),66…太陽軸の周方向凸条,12a…接触面,13…太陽軸の平歯車の歯底円,21,59,69…ナットの平歯車(内歯車),22,70…ナットの雌ねじ(ナットの螺旋凸条),60…ナットの周方向凸条,41,57,67…遊星軸の平歯車(遊星歯車),42,68…遊星軸の雄ねじ(遊星軸の螺旋溝),58…遊星軸の周方向溝,42a…クラウニング,P…太陽軸の雄ねじと遊星軸の雄ねじの接触点
【技術分野】
【0001】
本発明は、遊星歯車機構を用いて回転運動を直線運動に変換する遊星式回転―直線運動変換装置に関する。
【背景技術】
【0002】
回転運動を直線運動に変換する遊星式回転―直線運動変換装置の一つとして、太陽軸と、太陽軸の周囲に環状の空間を空けて囲むナットと、太陽軸とナットとの間に配列される複数の遊星軸と、を備える遊星式回転―直線運動変換装置が知られている(特許文献1参照)。太陽軸は、はすば状太陽歯車及びねじ状太陽歯車の双方を有する。遊星軸も、はすば状遊星歯車及びねじ状遊星歯車を有する。ナットも、はすば状内歯車及びねじ状内歯車を有する。太陽軸のはすば状太陽歯車、遊星軸のはすば状遊星歯車及びナットのはすば状内歯車が第一の遊星歯車機構を構成し、太陽軸のねじ状太陽歯車、遊星軸のねじ状遊星歯車及びナットのねじ状内歯車が第二の遊星歯車機構を構成する。太陽軸のねじ状太陽歯車、遊星軸のねじ状遊星歯車及びナットのねじ状内歯車のピッチは同一であり、互いに噛み合う第二の遊星歯車機構を構成する。そして、第一の遊星歯車機構と第二の遊星歯車機構の歯数比を異ならせることによって、ナットの回転運動を太陽軸の直線運動に変換している。
【0003】
すなわち、特許文献1に記載の遊星式回転―直線運動変換装置において、遊星軸のはすば状遊星歯車に対する太陽軸のはすば状太陽歯車の歯数比を、遊星軸のねじ状遊星歯車に対する太陽軸のねじ状太陽歯車の条数比(歯数比)と異ならせている。その一方、遊星軸のはすば状遊星歯車に対するナットのはすば状内歯車の歯数比を、遊星軸のねじ状遊星歯車に対するナットのねじ状内歯車の条数比に一致させている。
【0004】
特許文献1に記載の遊星式回転―直線運動変換装置の作動原理は以下のとおりに説明されている。太陽軸に対してナットを相対的に回転させると、遊星軸が太陽軸の回りを自転しながら公転する。ここで、第一の遊星歯車機構と第二の遊星歯車機構の歯数比が異なっているので、太陽軸が軸線方向に移動しないと仮定すると、第一の遊星歯車機構の遊星軸の公転位置と、第二の遊星歯車機構の遊星軸の公転位置が周方向にずれる。しかし、遊星軸のはすば状遊星歯車とねじ状遊星歯車とは互いに結合されているので、はすば状遊星歯車の公転位置とねじ状遊星歯車の公転位置がずれることはできない。太陽軸が軸線方向に移動すると、はすば状遊星歯車の公転位置が変化するのに対し、ねじ状遊星歯車の公転位置が変化する。それゆえ、太陽軸が軸線方向に移動することになる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−56952号公報 (図1,図14参照)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、従来の遊星式回転―直線運動変換装置にあっては、太陽軸が遊星軸に対して軸線方向に相対的に直線運動し、太陽軸のねじ状太陽歯車が遊星軸のねじ状遊星歯車の領域から外れたとき、太陽軸のねじ状太陽歯車が遊星軸のはすば状遊星歯車に当たってしまうという課題がある。このため、太陽軸のストローク量が、太陽軸のねじ状太陽歯車が遊星軸のはすば状遊星歯車に当たらない範囲に制限されてしまう。さらに、遊星軸のねじ状遊星歯車の軸線方向の片側にのみはすば状遊星歯車を設け、片側でのみ歯車駆動させているので、遊星軸を傾けるような曲げモーメントが作用し易く、回転の伝達効率が悪くなるという課題もある。
【0007】
太陽軸のストローク量を大きくとり、かつ遊星軸に曲げモーメントが作用するのを防止するために、上記特許文献1の図14には、太陽軸の外周面に螺旋状に多数の凹みを配列し、遊星軸に太陽軸の凹みに嵌まる多数の凸部を配列した遊星式回転―直線運動変換装置も開示されている。
【0008】
しかし、太陽軸の外周面の螺旋状の多数の凹みは、事実上転造以外で製造することができないので、太陽軸の製造が困難になるという新たな課題が生ずる。たとえ転造ダイスによって太陽軸を製造できたとしても、加工誤差や焼き入れ後の歪等に起因する多数の凹みのピッチ誤差を修正することができない。多数の凹みを研削加工することは事実上不可能だからである。さらに、太陽軸の多数の凹みと遊星軸の多数の凸部とが間欠的に噛み合う構造であり、しかも多数の凹部及び多数の凸部が上述のように加工精度の出にくい転造加工により製造されるので、太陽軸の凹みと遊星軸の凸部との間にがた(すきま)が発生し易く、太陽軸の凹み及び遊星軸の凸部の耐久性に悪影響を及ぼすという課題もある。
【0009】
本発明は、従来の遊星式回転―直線運動変換装置の上記の課題を解決するためになされたものであり、太陽軸又はナットのストローク量を大きくすることができ、生産性、耐久性を向上させることができる実用的な遊星式回転―直線運動変換装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
以下、本発明について説明する。
上述した課題を解決する為に、本発明の一態様は、太陽歯車を有すると共に、螺旋凸条又は周方向凸条を有する太陽軸と、前記太陽軸の前記太陽歯車に噛み合う遊星歯車を有すると共に、前記太陽軸の前記螺旋凸条又は前記周方向凸条に噛み合う螺旋溝又は周方向溝を有する遊星軸と、前記遊星軸の前記遊星歯車に噛み合う内歯車を有すると共に、前記遊星軸の前記螺旋溝又は前記周方向溝に噛み合うナットと、を備え、前記太陽軸の前記太陽歯車、前記遊星軸の前記遊星歯車、及び前記ナットの前記内歯車が遊星歯車機構を構成し、前記ナットに対して前記太陽軸を相対的に回転させると、前記遊星軸が前記太陽軸に対して前記太陽軸の軸線方向に相対的に直線運動する遊星式回転―直線運動変換装置において、前記遊星軸の前記遊星歯車が形成される領域と、前記遊星軸の前記螺旋溝又は前記周方向溝が形成される領域とを、前記遊星軸の軸線方向に分離し、前記太陽軸の前記螺旋凸条又は前記周方向凸条の凸部に、前記遊星軸の前記遊星歯車に噛み合う前記太陽歯車を形成する遊星式回転―直線運動変換装置である。
【0011】
本発明の他の態様は、太陽歯車を有すると共に、螺旋凸条又は周方向凸条を有する太陽軸と、前記太陽軸の前記太陽歯車に噛み合う遊星歯車を有すると共に、前記太陽軸の前記螺旋凸条又は前記周方向凸条に噛み合う螺旋溝又は周方向溝を有する遊星軸と、前記遊星軸の前記遊星歯車に噛み合う内歯車を有すると共に、前記遊星軸の前記螺旋溝又は前記周方向溝に噛み合う螺旋凸条又は周方向凸条を有するナットと、を備え、前記太陽軸の前記太陽歯車、前記遊星軸の前記遊星歯車、及び前記ナットの前記内歯車が遊星歯車機構を構成し、前記太陽軸に対して前記ナットを相対的に回転させると、前記遊星軸が前記ナットに対して前記ナットの軸線方向に相対的に直線運動する遊星式回転―直線運動変換装置において、前記遊星軸の前記遊星歯車が形成される領域と、前記遊星軸の前記螺旋溝又は前記周方向溝が形成される領域とを、前記遊星軸の軸線方向に分離し、前記ナットの前記螺旋凸条又は前記周方向凸条の凸部に、前記遊星軸の前記遊星歯車に噛み合う前記内歯車を形成する遊星式回転―直線運動変換装置である。
【発明の効果】
【0012】
本発明の一態様によれば、太陽軸の螺旋凸条又は周方向凸条の凸部に、遊星軸の遊星歯車に噛み合う太陽歯車を形成するので、遊星軸が太陽軸に対し軸線方向に相対的に移動しても、太陽軸の螺旋凸条又は周方向凸条が遊星軸の遊星歯車に干渉することがなく、太陽軸の螺旋凸条又は周方向凸条と遊星軸の螺旋溝又は周方向溝との噛み合いが保たれ、太陽軸の太陽歯車と遊星軸の遊星歯車との噛み合いが保たれる。したがって、太陽軸に対するナットの軸線方向の相対的なストローク量を大きくすることができる。また、太陽軸を切削、転造のどちらでも製造することができるようになり、太陽軸を焼入れした後に研削加工等によりピッチを修正することもできるようになるので、太陽軸の生産性が向上する。さらに、遊星軸の遊星歯車が形成される領域と、遊星軸の螺旋溝又は周方向溝が形成される領域とを、遊星軸の軸線方向に分離しているので、遊星軸も切削、転造のどちらでも製造することができるようになり、遊星軸の製造も容易になる。
【0013】
本発明の他の態様によれば、ナットの螺旋凸条又は周方向凸条の凸部に、遊星軸の遊星歯車に噛み合う内歯車を形成するので、遊星軸がナットに対し軸線方向に相対的に移動しても、ナットの螺旋凸条又は周方向凸条が遊星軸の遊星歯車に干渉することがなく、ナットの螺旋凸条又は周方向凸条と遊星軸の螺旋溝又は周方向溝との噛み合いが保たれ、ナットの内歯車と遊星軸の遊星歯車との噛み合いが保たれる。したがって、ナットに対する太陽軸の軸線方向の相対的なストローク量を大きくすることができる。また、ナットを切削、転造のどちらでも製造することができるようになり、ナットを焼入れした後に研削加工等によりピッチを修正することもできるようになるので、ナットの生産性が向上する。さらに、遊星軸の遊星歯車が形成される領域と、遊星軸の螺旋溝又は周方向溝が形成される領域とを、遊星軸の軸線方向に分離しているので、遊星軸も切削、転造のどちらでも製造することができるようになり、遊星軸の製造も容易になる。
【図面の簡単な説明】
【0014】
【図1】本発明の第一の実施形態における遊星式回転−直線運動変換装置の斜視図
【図2】太陽軸の側面図
【図3】遊星軸の側面図
【図4】ナットの軸線に沿う断面図
【図5】太陽軸を1回転させたときの遊星軸の公転角度を示す模式図
【図6】総リードの算出方法の概念図
【図7】遊星軸に施したクラウニングを示す図
【図8】太陽軸の雄ねじ、遊星軸の雄ねじ、ナットの雌ねじの噛み合いを示す軸線に直交する断面図
【図9】平歯車のモジュールを変化させた遊星式回転−直線運動変換装置の比較図(モジュール0.68(a)及びモジュール0.42(b))
【図10】遊星軸の雄ねじと太陽軸の雄ねじの噛み合いを示す斜視図(モジュール0.68(a)及びモジュール0.42(b))
【図11】太陽軸の軸線に直交する断面図(モジュール0.68(a)及びモジュール0.42(b))
【図12】本発明の第二の実施形態における遊星式回転−直線運動変換装置の斜視図
【図13】上記遊星式回転−直線運動変換装置の断面図
【図14】ナットの断面図
【図15】本発明の第三の実施形態における遊星式回転−直線運動変換装置の斜視図
【図16】上記遊星式回転−直線運動変換装置の断面図
【図17】太陽軸の側面図
【図18】本発明の第一の実施形態の遊星式回転−直線運動変換装置を組み込んだアクチュエータの断面斜視図
【発明を実施するための形態】
【0015】
以下、添付図面に基づいて本発明の遊星式回転―直線運動変換装置を詳細に説明する。図1は、本発明の第一の実施形態における遊星式回転−直線運動変換装置の斜視図(内部構造を分かり易くするためにナットを半分に割った状態)を示す。遊星式回転−直線運動変換装置は、共通の軸線3に沿って延在する太陽軸1及び円環状のナット2を備える。太陽軸1とナット2との間の環状の空間には、これらに噛み合う複数の例えば九つの遊星軸4が配置される。遊星軸4の軸線は、太陽軸1及びナット2の軸線と平行である。九つの遊星軸4は太陽軸1の周りに周方向に均等間隔を空けて配列される。ナットに対して太陽軸1を相対的に回転すると、ナット2が軸線方向に直線運動する。
【0016】
太陽軸1には、太陽歯車としての平歯車11及び螺旋凸条としての雄ねじ12が形成される。遊星軸4には、遊星歯車としての平歯車41及び螺旋溝としての雄ねじ42が形成される。ナット2には、内歯車としての平歯車21及び螺旋凸条としての雌ねじ22が形成される。太陽軸1の太陽歯車、遊星軸4の遊星歯車、及びナット2の内歯車は、互いに噛み合い、遊星歯車機構を構成する。太陽歯車、遊星歯車、及び内歯車は、ねじれ角が25度以下の歯車であり、ねじれ角が0度の歯車、すなわち平歯車を含む。太陽軸1の螺線凸条、遊星軸4の螺旋溝及びナットの螺線凸条も、同一ピッチで互いに噛み合い、遊星ローラねじ機構を構成する。
【0017】
図2に示すように、太陽軸1の外周面には、螺旋凸条としての複数条の例えば八条の雄ねじ12が形成される。雄ねじ12は円筒状の外周面のつる巻き線に沿って形成され、所定のリード角を持つ。太陽軸1の軸線を含む平面による雄ねじ12の切り口の断面形状は台形である。もちろん、雄ねじ12の外径は雄ねじ12の谷の径よりも大きい。
【0018】
図1に示すように、太陽軸1の螺旋凸条としての雄ねじ12のピッチを遊星軸4の螺旋溝としての雄ねじ42のピッチに合わせれば、太陽軸1の雄ねじ12を遊星軸4の雄ねじ42に噛み合わせることができる。
【0019】
太陽軸1の雄ねじ12の凸部には、太陽歯車としての平歯車11が形成される。この平歯車11は、例えば一般的な平歯車と同様にインボリュート歯形に形成される。この平歯車11の全歯たけは、雄ねじ12のねじ山の高さよりも小さく、雄ねじ12には、平歯車11の歯底よりも内側に接触面12aが形成される。言い換えれば、平歯車11の歯底円は太陽軸1の雄ねじ12の谷の径よりも大きく設定される。この接触面12aに遊星軸4の雄ねじ42が接触する。
【0020】
太陽軸1の平歯車11には、遊星軸4の遊星歯車としての平歯車41が噛み合う。八条の雄ねじ12に形成される太陽軸1の平歯車11の位相は、太陽軸1の軸線方向からみて互いに一致している。太陽軸1の平歯車11の歯数をSz1,遊星軸4の平歯車41の歯数をPz1とおくと、太陽軸1の平歯車11と遊星軸4の平歯車41との間で、歯数Sz1,Pz1に応じた速比(回転数の比)で回転が伝達される。
【0021】
太陽軸1の平歯車11は太陽軸1の雄ねじ12の凸部に形成されている。このため、太陽軸1の平歯車11が形成される領域と、太陽軸1の雄ねじ12が形成される領域とが、太陽軸1の軸線方向に重なっている。遊星軸4が太陽軸1に対して太陽軸1の軸線方向に相対的に変位しても、太陽軸1の平歯車11が遊星軸4の平歯車41との噛み合いを維持できるよう、太陽軸1の平歯車11が形成される。
【0022】
太陽軸1の周囲には九つの遊星軸4が配置される。遊星軸4の配置個数は、太陽軸1及びナット2の平歯車11,21の歯数の和、並びに太陽軸1及びナット2の雄ねじ12,雌ねじ22の条数の和の、共通の約数である。
【0023】
図3に示すように、各遊星軸4には、螺旋溝として例えば二条の雄ねじ42が設けられ、遊星歯車として一対の平歯車41が設けられる。二条の雄ねじ42は遊星軸4の軸線方向の中央部に形成される。一対の平歯車41は遊星軸4の雄ねじ42の軸線方向の両端部に形成される。遊星軸4の軸線方向から見た一対の平歯車41の位相は互いに一致している。遊星軸4の雄ねじ42の両端部に平歯車41を形成することで、遊星軸4を軸線方向の両端部で歯車駆動させることができ、遊星軸4が傾くのを防止できる。
【0024】
上記太陽軸1においては、雄ねじ12が形成される領域と平歯車11が形成される領域とが太陽軸1の軸線方向に重なっている。これに対し、遊星軸4においては、雄ねじ42と平歯車41とが独立していて、雄ねじ42が形成される領域と平歯車41が形成される領域とが遊星軸4の軸線方向に分離している。そして、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12に噛み合い、遊星軸4の平歯車41が太陽軸1の平歯車11に噛み合う。遊星軸4の雄ねじ42と平歯車41とを独立させることで、遊星軸4の雄ねじ42の谷底に平歯車41を形成する必要がなくなり、遊星軸4の製造が容易になり、また遊星軸4と太陽軸1とが間欠的に噛み合うのを防止することができる。
【0025】
遊星軸4及び太陽軸1の雄ねじ42,12及び平歯車41,11の噛み合いを保った状態で、なおかつ太陽軸1のストローク量を大きくするために、太陽軸1の雄ねじ12に平歯車11が形成される。太陽軸1の雄ねじ12に平歯車を形成すると、一見、太陽軸1の雄ねじ12が遊星軸4の雄ねじ42に間欠的に噛み合うように見える。しかし、遊星軸4の雄ねじ42は、太陽軸1の雄ねじ12の平歯車11の歯底円よりも内側で接触するので、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12に間欠的に噛み合うことはない。
【0026】
図1に示すように、各遊星軸4は、軸線方向の両端にて円環板状のキャリア(図示せず)に軸線の周りに回転可能に支持されている。キャリアはナット2に対し相対的に軸線の周りに自由に回転できるようにナット2に支持される。もちろん、キャリア2の内径は太陽軸1の外径よりも大きい。
【0027】
図4に示すように、ナット2は、略円筒形状に形成される。ナット2の軸線方向の一端部には、ナット2を他の部材に取り付けるためのフランジ2aが形成される。ナット2は図示しない他の部材に相対回転不能に連結される。ナット2の内周面の軸線方向の両端部には、内径を広げた一対のリング段差部2bが形成される。この一対のリング段差部2bに一対のリング歯車部材5が圧入等により固定される(図1参照)。一対のリング歯車部材5には、遊星軸4の一対の平歯車41と噛み合う一対の内歯車21が形成される。またナット2の中央部2cの内周面には、螺旋凸条として、遊星軸4の雄ねじ42と螺合する複数条の例えば十条の雌ねじ22が形成される。雌ねじ22はナット2の内周面のつる巻き線に沿う所定のリード角を持つ。ナット2の軸線を含む平面における雌ねじ22の切り口の断面形状は、台形である。
【0028】
上記遊星式回転−直線運動変換装置を組み立てるときは、まずナット2の内側に遊星軸4を環状に抱え込ませる。キャリアによって遊星軸4とナット2との位置関係をずれないように固定した段階で、太陽軸1を遊星軸4にねじ込む。
【0029】
図1に示すように、太陽軸1の平歯車11、遊星軸4の平歯車41及びナット2の内歯車21は共働して遊星歯車機構を構成しており、それぞれ太陽歯車、遊星歯車、内歯車として機能する。また太陽軸1の雄ねじ12、遊星軸4の雄ねじ42、ナット2の雌ねじ22は共働して遊星ローラねじ機構を構成しており、それぞれ螺線凸条、螺旋溝、螺線凸条として機能する。
【0030】
遊星ローラねじ機構を構成する太陽軸1の雄ねじ12、遊星軸4の雄ねじ42及びナット2の雌ねじ22は互いに噛み合っている。雄ねじ12及び雄ねじ42は互いに逆方向のリードを有し、雄ねじ42及び雌ねじ22は互いに同一方向のリードを有する。雄ねじ12、雄ねじ42、雌ねじ22のピッチは互いに等しい。そして、遊星軸4の雄ねじ42のリード角はナット2の雌ねじ22のリード角と相手方のネジリード基準ピッチ円において同一である。このため、遊星軸4がナット2の内側を自公転しても、遊星軸4がナット2に対して軸線方向にストロークすることはない。一方、遊星軸4の雄ねじ42のリード角は太陽軸1の雄ねじ12のリード角と異なる。このため、遊星軸4が太陽軸1の回りを自公転すると、遊星軸4が太陽軸1に対して軸線方向に直線運動する。したがって、ナット2も太陽軸1に対して軸線方向に直線運動する。
【0031】
遊星歯車機構を構成する太陽軸1の平歯車11、遊星軸4の平歯車41及びナット2の内歯車21も互いに噛み合う。この遊星式回転−直線運動変換装置においては、平歯車11、平歯車41、内歯車21の歯数は、それぞれ69,24,120である。
【0032】
太陽軸1を1回転させたとき、ナット2に対する太陽軸1のストローク量(総リード)は以下のように算出される。図5に示すように、太陽軸1を1回転させると遊星軸4が太陽軸1の周囲を自転しながら公転する。遊星軸4の公転回転数である遊星軸公転減速比は、以下の式で求められる。
【0033】
【数1】
【0034】
具体的な数値を入れると、
【数2】
【0035】
太陽軸1の雄ねじ12のピッチは7mm、条数は8なので、太陽軸1の1回転あたりのリードは7×8=56mmになる。図6に示すように、太陽軸1の雄ねじ12のSPC(太陽軸ネジリード基準ピッチ円)を28.75mmとすると、太陽軸1は1回転あたり、(28.75×π)の基準ピッチ円において56mm軸線方向に進む。
【0036】
一方、遊星軸4の雄ねじのピッチは7mm、条数は2なので、リードは7×2=14mmになる。遊星軸4の雄ねじのPPC(遊星軸ネジリード基準ピッチ円)を10mmにすると、遊星軸4は1回転あたり、(10×π)の基準ピッチ円において14mm進む。
【0037】
太陽軸1の周囲を遊星軸4が公転する。太陽軸1を1回転させたときの接触部7(図5参照)の長さは、上記遊星軸公転減速比から28.75×π×0.6349となる。そのときの太陽軸1のリードと遊星軸4のリードの差分が総リードLとなる。
【0038】
すなわち、総リードLは、太陽軸1のリード−遊星軸4のリードであり、
L=56×0.6349−28.75×π×0.6349/(10×π)×14=10mmとなる。
【0039】
一般式で表わすと、総リードLは以下の計算式で表わされる。
【数3】
【0040】
図7に示すように、遊星軸4の雄ねじ42には、クラウニング42aが施される。クラウニング42aは、遊星軸4の軸線を含む断面で見たとき、又は遊星軸4の雄ねじ42のリードに直角な断面で見たとき、円弧形状に形成される。クラウニング42aを施すことによって、太陽軸1の雄ねじ12と遊星軸4の雄ねじ42とを点接触させることができる。遊星軸4と太陽軸1との接触点は、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12に対して滑らずに転がり運動する点の近傍に配置される。このようにすることで、太陽軸1の雄ねじ12と遊星軸4の雄ねじ42との間の差動滑りを低減することができ、回転の伝達効率を向上させることができる。
【0041】
図8に示すように、太陽軸1の軸線方向からみて、遊星軸4の雄ねじ42の外径円43の一部は太陽軸1の平歯車11の歯底円13よりも内側に入り込む。そして、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12に接触する点Pは、太陽軸1の雄ねじ12の接触面12a(太陽軸1の平歯車11の歯底円13よりも内側、図10参照)である。太陽軸1に軸線方向の荷重がかかると、太陽軸1の雄ねじ12及び遊星軸4の雄ねじ42の接触点Pが弾性変形し、接触領域が広くなる。太陽軸1の軸線方向の荷重は、弾性変形した太陽軸1の雄ねじ12の接触面12aが受けることになる。遊星軸4の雄ねじ42を太陽軸1の雄ねじ12の接触面12aに接触させることで、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12に形成される平歯車11にのみ接触することを避けることができる。このため、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12の平歯車11に間欠的に当たってしまう(すなわち遊星軸4の雄ねじ42が太陽軸1の雄ねじ12の平歯車11に当たっているときと当たってないときが生ずる)のを防止することができ、遊星軸4の雄ねじ42を太陽軸1の雄ねじ12に安定して接触させることができる。また、遊星軸4の雄ねじ42が太陽軸1の雄ねじ12の平歯車11に間欠的に当たるのを防止できるので、せん断応力や曲げモーメントに強いねじになる。
【0042】
本実施形態においては、遊星軸4の雄ねじ42を太陽軸1の雄ねじ12の接触面12aに接触させたいがゆえ、遊星軸4の雄ねじ42を太らせている。遊星軸4の雄ねじ42を極端に太らせると隣の遊星軸4に干渉する。このため遊星軸4の配置個数を九つに減らしている。
【0043】
遊星軸4の雄ねじ42のリード角は、太陽軸1の雄ねじ12のリード角と異なる。このため厳密にいうと、遊星軸4の雄ねじ42と太陽軸1の雄ねじ12との接触点Pは、太陽軸1の中心と遊星軸4の中心とを結んだ線15から僅かにずれている。一方、遊星軸4の雄ねじ42のリード角はナット2の雌ねじ22のリード角と等しい。このため、遊星軸4の雄ねじ42とナット2の雌ねじ22との接触点Qは、太陽軸1の中心と遊星軸4の中心とを結んだ線15上に位置する。
【0044】
図9は、平歯車のモジュールを変化させた例を示す。平歯車の速比及び噛み合い位相を維持したまま、平歯車のモジュールを例えば0.68から0.42に小さくすると、太陽軸1の雄ねじ12の平歯車11の円ピッチが小さくなる。図10に示すように、平歯車11のモジュールを0.68から0.42に小さくすると、太陽軸1の雄ねじ12に形成される平歯車11の全歯たけを小さくすることができ、雄ねじ12の接触面12aの半径方向の厚みを厚くすることができる。このため、遊星軸4の雄ねじ42を太陽軸1の雄ねじ12の接触面12aに接触させ易くなる。さらに、図11に示すように、太陽軸1の平歯車11の全歯たけを小さくできる分、太陽軸1の雄ねじ12の噛み合いピッチ円(図中噛み合い領域で示す)を大きくでき、当該噛み合いピッチ円を滑りが生じない滑り0領域に近付けることができ、回転の伝達効率を向上させることができる。噛み合いピッチ円とは、太陽軸1の雄ねじ12と遊星軸4の雄ねじ42とが噛みあっている点上の軌跡である。滑り0領域とは、太陽軸1の雄ねじ12と遊星軸4の雄ねじ42とに滑りが生じない点上の軌跡である。自公転する遊星軸4が描く螺旋状の軌道長さと、太陽軸1の螺旋状の軌道長さとが一致する領域が滑り0領域である。
【0045】
図1に示すように、遊星軸4の雄ねじ42はナット2の雌ねじ22に対しても、差動滑りが発生しないよう転がり接触する点の近傍で接触する。遊星軸4の雄ねじ42をオーバーサイズにすることにより予圧を与えることが可能になり、バックラッシュをなくすことができる。
【0046】
上記の実施形態においては、遊星軸4が軸線方向に太陽軸1に対し相対的に変位する例について説明した。
【0047】
これとは逆に遊星軸が軸線方向にナットに対し相対的に変位してもよい。この場合には、螺旋溝を構成するナットの螺旋状の雌ねじの凸部に、内歯車を構成する歯車が設けられる。遊星軸には、螺旋溝を構成する雄ねじ、及びこの雄ねじの軸線方向の両側に遊星歯車を構成する一対の平歯車が遊星軸の軸線方向に分かれた状態で設けられる。太陽軸には、螺線凸条を構成する雄ねじ、及びこの雄ねじの軸線方向の両側に太陽歯車を構成する一対の平歯車が軸線方向に分かれた状態で設けられる。この例によれば、遊星軸がナットに対してストロークしてもナットのねじ状内歯車が遊星軸の遊星歯車に干渉することがない。したがって、ナットに対する太陽軸の軸線方向の相対的なストローク量を大きくすることができる。
【0048】
図12ないし図14は、本発明の第二の実施形態における遊星式回転−直線運動変換装置を示す。図12は、遊星式回転−直線運動変換装置の斜視図(内部構造を分かり易くするためにナット52を半分に割った状態)を示し、図13は、遊星式回転−直線運動変換装置の断面図を示す。この実施形態の遊星式回転−直線運動変換装置も、太陽軸51と、太陽軸51の周囲に配置される複数の遊星軸54と、太陽軸51及び遊星軸54を囲む環状のナット52と、を備える。
【0049】
太陽軸51には、太陽歯車としての平歯車55及び螺旋凸条としての雄ねじ56が形成される。第一の実施形態の遊星式回転−直線運動変換装置と同様に、太陽軸51の平歯車55は、雄ねじ56の凸部に形成される。雄ねじ56は所定のリード角を持つ。
【0050】
遊星軸54には、遊星歯車としての一対の平歯車57が形成され、一対の平歯車57の間に周方向溝58が形成される。周方向溝58は、周方向に伸びる単一のリング状溝を遊星軸4の軸線方向に多数配列してなる。遊星軸54の平歯車57が太陽軸51の平歯車55に噛み合い、遊星軸54の周方向溝58が太陽軸51の雄ねじ56に噛み合う。図14のナット52の断面図に示すように、遊星軸54の周方向溝58のリード角は0度である。遊星軸54の周方向溝58のピッチは太陽軸51の雄ねじ56のピッチと同一である。
【0051】
図12及び図13に示すように、ナット52には、内歯車としての一対の平歯車59が形成され、一対の平歯車59の間に周方向凸条60が形成される。ナット52の一対の平歯車59が遊星軸54の一対の平歯車57に噛み合い、ナット52の周方向凸条60が遊星軸54の周方向溝58に噛み合う。図14に示すように、ナット52の周方向凸条60も、周方向に伸びる単一のリング状凸条を複数配列してなる。周方向凸条60のリード角は0度である。
【0052】
太陽軸51の平歯車55、遊星軸54の平歯車57、及びナット52の平歯車59が、遊星歯車機構を構成する。ナット52に対して太陽軸51を相対的に回転させると、遊星軸54が太陽軸51の周囲を自転しながら公転する。
【0053】
太陽軸51の雄ねじ56、遊星軸54の周方向溝58及びナット52の周方向凸条60は、互いに噛み合っている。上記第一の実施形態の遊星式回転−直線運動変換装置と異なり、遊星軸54の周方向溝58及びナット52の周方向凸条60のリード角は0度であるが、第一の実施形態と同様に、太陽軸51の周囲を遊星軸54が自転しながら公転すると、太陽軸51の雄ねじ56のリード角と遊星軸54の周方向溝58のリード角との差により、遊星軸54及びナット52が軸線方向に移動する。
【0054】
この実施形態の遊星式回転−直線運動変換装置によれば、以下の効果が得られる。1.ナット52の周方向凸条60及び遊星軸54の周方向溝58が螺旋状になっていないので、製作精度が向上する(加工精度は、螺旋状溝を加工する時のインデックス精度に左右されずに、加工機の送り精度のみに依存する)。2.ナット52の周方向凸条60及び遊星軸54の周方向溝58のリード角が0であるので、リード誤差による相対変位が生じない。3.ナット52の周方向凸条60及び遊星軸54の周方向溝58のリード角が0であるので、ねじの条数は0条と定義され、遊星軸54の配置数の自由度が増し、強度が得やすい。4.太陽軸51のねじの条数を少なく設計できるので、精度が得やすい。5.正効率を下げずに逆効率を極めて小さく設計できる。
【0055】
図15ないし図17は、本発明の第三の実施形態における遊星式回転−直線運動変換装置を示す。図15は、遊星式回転−直線運動変換装置の斜視図を示し、図16は、断面図を示す。この実施形態の遊星式回転−直線運動変換装置も、太陽軸61と、太陽軸61の周囲に配置される複数の遊星軸64と、太陽軸61及び遊星軸64を囲む環状のナット62と、を備える。
【0056】
太陽軸61には、太陽歯車としての平歯車65及び周方向凸条66が形成される。図17の太陽軸61の側面図に示すように、周方向凸条66は、周方向に伸びる単一の凸条を太陽軸61の軸線方向に複数配列してなる。周方向凸条66のリード角は0度である。太陽軸61の平歯車65は、周方向凸条66の凸部に形成される。
【0057】
図15に示すように、遊星軸64には、遊星歯車としての一対の平歯車67が形成され、及び一対の平歯車67間に螺旋溝としての雄ねじ68が形成される。遊星軸64の一対の平歯車67が太陽軸61の平歯車65に噛み合い、遊星軸64の雄ねじ68が太陽軸61の周方向凸条66に噛み合う。遊星軸64の雄ねじ68のピッチは、太陽軸61の周方向凸条66のピッチと同一である。遊星軸64の雄ねじ68は所定のリード角を持つ。
【0058】
ナット62には、内歯車としての平歯車69及び螺旋凸条としての雌ねじ70が形成される。ナット62の平歯車69が遊星軸64の平歯車67に噛み合い、ナット62の雌ねじ70が遊星軸64の雄ねじ68に噛み合う。ナット62の雌ねじ70は遊星軸64の雄ねじ69と逆方向の同一のリード角を持つ。
【0059】
太陽軸61の平歯車65、遊星軸64の平歯車67、及びナット62の平歯車69が遊星歯車機構を構成する。ナット62に対して太陽軸61を回転させると、遊星軸64がナット62の周囲を自転しながら公転する。
【0060】
太陽軸61の周方向凸条66、遊星軸64の雄ねじ68及びナット62の雌ねじ70は互いに噛み合っている。上記第一の実施形態の遊星式回転−直線運動変換装置と異なり、太陽軸61の周方向凸条66のリード角は0度であるので、太陽軸61の周方向凸条66がねじ状歯車を構成する訳ではない。しかし、太陽軸61の周囲を遊星軸64が自転しながら公転すると、太陽軸61の周方向凸条66のリード角と遊星軸64の雄ねじ68のリード角との差により、太陽軸61が軸線方向に移動する。
【0061】
この実施形態の遊星式回転−直線運動変換装置によれば、以下の効果が得られる。1.太陽軸61の周方向凸条66が螺旋状になっていないので、製作精度が向上する。2.太陽軸61の周方向凸条66のリード角が0であるので、リード誤差による相対変位が生じない。3.太陽軸61の周方向凸条66のリード角が0であるので、ねじの条数は0条と定義され、遊星軸64の配置数の自由度が増し、強度が得やすい。4.太陽軸61のねじの条数を0に設計できるので、精度が得やすい。5.正効率を下げずに逆効率を極めて小さく設計できる。
【0062】
図18は、本発明の第一の実施形態の遊星式回転−直線運動変換装置を組み込んだアクチュエータを示す。このアクチュータにおいては、中空モータ73によってナット2を回転させ、これにより軸線方向に移動する太陽軸1がハウジング74から出入りするようになっている。
【0063】
ナット2はその前後方向の両端部がベアリング76,77に回転可能に支持されている。ベアリング76,77はハウジング74の内部に組み込まれている。
【0064】
モータ73はハウジング74に一体的に組み込まれている。モータ73のロータとなる永久磁石71がナットの外周面に固定される。モータ73のステータとなる三相コイル72は、永久磁石71を取り囲んだ状態でハウジング74に一体的に固定される。
【0065】
ハウジング74の前部壁75には、太陽軸1が軸線の回りを回転するのを防止し、かつ太陽軸1がその軸線方向に直線運動するのを許容するスプライン溝75aが形成される。太陽軸1には、ハウジング75のスプライン溝75aに係合するスプライン凸条1aが形成される。これらのスプライン溝75a及びスプライン凸条1aが回り止め機構を構成する。
【0066】
モータ73がナット2を回転させると、遊星軸4が太陽軸1の周囲を自転しながら公転する。遊星軸4の自転及び公転に伴い、遊星軸4に噛み合う太陽軸1が軸線方向に移動する。太陽軸1の軸線の回りの回転は回り止め機構1a,75aによって制限されているので、太陽軸1がナット2と一緒に回転することはない。
【0067】
本実施形態のアクチュエータによれば、逆効率が低い遊星式回転−直線運動変換装置を組み込んでいるので、太陽軸1の軸方向位置を保持するためのモータ73のパワーを小さくすることができる。太陽軸1に作用する軸方向の荷重に逆らって、太陽軸1の位置を保持するためには、太陽軸1の位置を保持している間、モータ73がトルクを発生し続けなければならない。遊星式回転−直線運動変換装置はボールねじよりも逆効率(軸方向の荷重を回転方向のトルクに変える効率)が低いので、太陽軸1の位置を保持するために必要なトルクはボールねじに比べて極端に小さくてすむ。したがって、モータ73の容量、寸法を小さくすることができ、モータ73の発熱を抑えることができる。
【0068】
なお、本発明は上記実施形態に具現化されるのに限られることはなく、本発明の要旨を変更しない範囲で様々に変更できる。上記実施形態で示された歯数等の設計諸元は一例であり、総リード、軸線方向荷重に応じて適宜変更することができる。
【符号の説明】
【0069】
1,51,61…太陽軸,2,52,62…ナット,3…軸線,4,54,64…遊星軸,11,55,65…太陽軸の平歯車(太陽歯車),12,56…太陽軸の雄ねじ(太陽軸の螺旋凸条),66…太陽軸の周方向凸条,12a…接触面,13…太陽軸の平歯車の歯底円,21,59,69…ナットの平歯車(内歯車),22,70…ナットの雌ねじ(ナットの螺旋凸条),60…ナットの周方向凸条,41,57,67…遊星軸の平歯車(遊星歯車),42,68…遊星軸の雄ねじ(遊星軸の螺旋溝),58…遊星軸の周方向溝,42a…クラウニング,P…太陽軸の雄ねじと遊星軸の雄ねじの接触点
【特許請求の範囲】
【請求項1】
太陽歯車を有すると共に、螺旋凸条又は周方向凸条を有する太陽軸と、
前記太陽軸の前記太陽歯車に噛み合う遊星歯車を有すると共に、前記太陽軸の前記螺旋凸条又は前記周方向凸条に噛み合う螺旋溝又は周方向溝を有する遊星軸と、
前記遊星軸の前記遊星歯車に噛み合う内歯車を有すると共に、前記遊星軸の前記螺旋溝又は前記周方向溝に噛み合うナットと、を備え、
前記太陽軸の前記太陽歯車、前記遊星軸の前記遊星歯車、及び前記ナットの前記内歯車が遊星歯車機構を構成し、
前記ナットに対して前記太陽軸を相対的に回転させると、前記遊星軸が前記太陽軸に対して前記太陽軸の軸線方向に相対的に直線運動する遊星式回転―直線運動変換装置において、
前記遊星軸の前記遊星歯車が形成される領域と、前記遊星軸の前記螺旋溝又は前記周方向溝が形成される領域とを、前記遊星軸の軸線方向に分離し、
前記太陽軸の前記螺旋凸条又は前記周方向凸条の凸部に、前記遊星軸の前記遊星歯車に噛み合う前記太陽歯車を形成する遊星式回転―直線運動変換装置。
【請求項2】
前記太陽軸の前記螺旋凸条又は前記周方向凸条と前記遊星軸の前記螺旋溝又は前記周方向溝との接触位置が、前記太陽軸の軸線方向からみて、前記太陽軸の前記太陽歯車の歯底円よりも内側であることを特徴とする請求項1に記載の遊星式回転―直線運動変換装置。
【請求項3】
前記遊星軸の前記螺旋溝又は前記周方向溝には、前記遊星軸の軸線を含む断面で見たとき、又は前記遊星軸の前記螺旋溝又は前記周方向溝のリードに直角な断面で見たとき、前記遊星軸の前記螺旋溝又は前記周方向溝と前記太陽軸の前記螺旋凸条又は前記周方向凸条とが点接触するよう、クラウニングが施されることを特徴とする請求項2に記載の遊星式回転―直線運動変換装置。
【請求項4】
前記遊星軸の軸線方向の中央部に前記螺旋溝又は前記周方向溝が形成され、
前記遊星軸の軸線方向の両端部に、一対の前記遊星歯車が形成されることを特徴とする請求項1ないし3のいずれかに記載の遊星式回転―直線運動変換装置。
【請求項5】
前記ナットに対して前記太陽軸を相対的に回転させると、前記遊星軸が前記太陽軸に対して前記太陽軸の軸線方向に相対的に直線運動するよう、前記太陽軸の前記螺旋凸条又は前記周方向凸条のリード角と前記遊星軸の前記螺旋溝又は前記周方向溝のリード角とが互いに異なることを特徴とする請求項1ないし4のいずれかに記載の遊星式回転―直線運動変換装置。
【請求項6】
太陽歯車を有すると共に、螺旋凸条又は周方向凸条を有する太陽軸と、
前記太陽軸の前記太陽歯車に噛み合う遊星歯車を有すると共に、前記太陽軸の前記螺旋凸条又は前記周方向凸条に噛み合う螺旋溝又は周方向溝を有する遊星軸と、
前記遊星軸の前記遊星歯車に噛み合う内歯車を有すると共に、前記遊星軸の前記螺旋溝又は前記周方向溝に噛み合う螺旋凸条又は周方向凸条を有するナットと、を備え、
前記太陽軸の前記太陽歯車、前記遊星軸の前記遊星歯車、及び前記ナットの前記内歯車が遊星歯車機構を構成し、
前記太陽軸に対して前記ナットを相対的に回転させると、前記遊星軸が前記ナットに対して前記ナットの軸線方向に相対的に直線運動する遊星式回転―直線運動変換装置において、
前記遊星軸の前記遊星歯車が形成される領域と、前記遊星軸の前記螺旋溝又は前記周方向溝が形成される領域とを、前記遊星軸の軸線方向に分離し、
前記ナットの前記螺旋凸条又は前記周方向凸条の凸部に、前記遊星軸の前記遊星歯車に噛み合う前記内歯車を形成する遊星式回転―直線運動変換装置。
【請求項7】
前記太陽軸に対して前記ナットを相対的に回転させると、前記遊星軸が前記ナットに対して前記ナットの軸線方向に相対的に直線運動するよう、前記ナットの前記螺旋凸条又は前記周方向凸条のリード角と前記遊星軸の前記螺旋溝又は前記周方向溝のリード角とが互いに異なることを特徴とする請求項6に記載の遊星式回転―直線運動変換装置。
【請求項8】
請求項1ないし7のいずれかに記載の遊星式回転―直線運動変換装置と、
前記遊星式回転―直線運動変換装置の前記ナットを前記太陽軸に対して回転させる駆動源と、
前記太陽軸がその軸線の回りを回転するのを防止し、かつ太陽軸がその軸線方向に直線運動するのを許容する回り止め機構と、を備え、
前記駆動源が前記太陽軸に対して前記ナットを回転させることによって、前記太陽軸が前記ナットに対して太陽軸の軸線方向に直線運動するアクチュエータ。
【請求項1】
太陽歯車を有すると共に、螺旋凸条又は周方向凸条を有する太陽軸と、
前記太陽軸の前記太陽歯車に噛み合う遊星歯車を有すると共に、前記太陽軸の前記螺旋凸条又は前記周方向凸条に噛み合う螺旋溝又は周方向溝を有する遊星軸と、
前記遊星軸の前記遊星歯車に噛み合う内歯車を有すると共に、前記遊星軸の前記螺旋溝又は前記周方向溝に噛み合うナットと、を備え、
前記太陽軸の前記太陽歯車、前記遊星軸の前記遊星歯車、及び前記ナットの前記内歯車が遊星歯車機構を構成し、
前記ナットに対して前記太陽軸を相対的に回転させると、前記遊星軸が前記太陽軸に対して前記太陽軸の軸線方向に相対的に直線運動する遊星式回転―直線運動変換装置において、
前記遊星軸の前記遊星歯車が形成される領域と、前記遊星軸の前記螺旋溝又は前記周方向溝が形成される領域とを、前記遊星軸の軸線方向に分離し、
前記太陽軸の前記螺旋凸条又は前記周方向凸条の凸部に、前記遊星軸の前記遊星歯車に噛み合う前記太陽歯車を形成する遊星式回転―直線運動変換装置。
【請求項2】
前記太陽軸の前記螺旋凸条又は前記周方向凸条と前記遊星軸の前記螺旋溝又は前記周方向溝との接触位置が、前記太陽軸の軸線方向からみて、前記太陽軸の前記太陽歯車の歯底円よりも内側であることを特徴とする請求項1に記載の遊星式回転―直線運動変換装置。
【請求項3】
前記遊星軸の前記螺旋溝又は前記周方向溝には、前記遊星軸の軸線を含む断面で見たとき、又は前記遊星軸の前記螺旋溝又は前記周方向溝のリードに直角な断面で見たとき、前記遊星軸の前記螺旋溝又は前記周方向溝と前記太陽軸の前記螺旋凸条又は前記周方向凸条とが点接触するよう、クラウニングが施されることを特徴とする請求項2に記載の遊星式回転―直線運動変換装置。
【請求項4】
前記遊星軸の軸線方向の中央部に前記螺旋溝又は前記周方向溝が形成され、
前記遊星軸の軸線方向の両端部に、一対の前記遊星歯車が形成されることを特徴とする請求項1ないし3のいずれかに記載の遊星式回転―直線運動変換装置。
【請求項5】
前記ナットに対して前記太陽軸を相対的に回転させると、前記遊星軸が前記太陽軸に対して前記太陽軸の軸線方向に相対的に直線運動するよう、前記太陽軸の前記螺旋凸条又は前記周方向凸条のリード角と前記遊星軸の前記螺旋溝又は前記周方向溝のリード角とが互いに異なることを特徴とする請求項1ないし4のいずれかに記載の遊星式回転―直線運動変換装置。
【請求項6】
太陽歯車を有すると共に、螺旋凸条又は周方向凸条を有する太陽軸と、
前記太陽軸の前記太陽歯車に噛み合う遊星歯車を有すると共に、前記太陽軸の前記螺旋凸条又は前記周方向凸条に噛み合う螺旋溝又は周方向溝を有する遊星軸と、
前記遊星軸の前記遊星歯車に噛み合う内歯車を有すると共に、前記遊星軸の前記螺旋溝又は前記周方向溝に噛み合う螺旋凸条又は周方向凸条を有するナットと、を備え、
前記太陽軸の前記太陽歯車、前記遊星軸の前記遊星歯車、及び前記ナットの前記内歯車が遊星歯車機構を構成し、
前記太陽軸に対して前記ナットを相対的に回転させると、前記遊星軸が前記ナットに対して前記ナットの軸線方向に相対的に直線運動する遊星式回転―直線運動変換装置において、
前記遊星軸の前記遊星歯車が形成される領域と、前記遊星軸の前記螺旋溝又は前記周方向溝が形成される領域とを、前記遊星軸の軸線方向に分離し、
前記ナットの前記螺旋凸条又は前記周方向凸条の凸部に、前記遊星軸の前記遊星歯車に噛み合う前記内歯車を形成する遊星式回転―直線運動変換装置。
【請求項7】
前記太陽軸に対して前記ナットを相対的に回転させると、前記遊星軸が前記ナットに対して前記ナットの軸線方向に相対的に直線運動するよう、前記ナットの前記螺旋凸条又は前記周方向凸条のリード角と前記遊星軸の前記螺旋溝又は前記周方向溝のリード角とが互いに異なることを特徴とする請求項6に記載の遊星式回転―直線運動変換装置。
【請求項8】
請求項1ないし7のいずれかに記載の遊星式回転―直線運動変換装置と、
前記遊星式回転―直線運動変換装置の前記ナットを前記太陽軸に対して回転させる駆動源と、
前記太陽軸がその軸線の回りを回転するのを防止し、かつ太陽軸がその軸線方向に直線運動するのを許容する回り止め機構と、を備え、
前記駆動源が前記太陽軸に対して前記ナットを回転させることによって、前記太陽軸が前記ナットに対して太陽軸の軸線方向に直線運動するアクチュエータ。
【図5】

【図6】
【図8】
【図1】
【図2】
【図3】
【図4】
【図7】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図6】
【図8】
【図1】
【図2】
【図3】
【図4】
【図7】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2010−156452(P2010−156452A)
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願番号】特願2009−223540(P2009−223540)
【出願日】平成21年9月28日(2009.9.28)
【出願人】(390029805)THK株式会社 (420)
【Fターム(参考)】
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願日】平成21年9月28日(2009.9.28)
【出願人】(390029805)THK株式会社 (420)
【Fターム(参考)】
[ Back to top ]