
運転支援装置
【課題】運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができる運転支援装置を提供する。
【解決手段】運転支援装置100は、車両の周辺状況と当該車両の状態とに応じて画像を切り替えて表示する運転支援装置であって、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態でない場合に、当該車両の後方画像を表示する画面表示切換器9及び画面表示器10を備える。これにより、当該車両がイグニッションオン状態後の最初の前進走行状態でなく即ち駐車中から前方へ出発する状態でない場合、且つ、当該車両の周辺に物体が検出された場合、後方画像を表示させるための操作を運転者が行うことなく、後方画像を適切に表示させることが可能になる。
【解決手段】運転支援装置100は、車両の周辺状況と当該車両の状態とに応じて画像を切り替えて表示する運転支援装置であって、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態でない場合に、当該車両の後方画像を表示する画面表示切換器9及び画面表示器10を備える。これにより、当該車両がイグニッションオン状態後の最初の前進走行状態でなく即ち駐車中から前方へ出発する状態でない場合、且つ、当該車両の周辺に物体が検出された場合、後方画像を表示させるための操作を運転者が行うことなく、後方画像を適切に表示させることが可能になる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の周辺状況と当該車両の状態とに応じて画像を切り替えて表示する運転支援装置に関する。
【背景技術】
【0002】
従来、運転者に対して自車両周辺の画像を表示する装置が提案されている。例えば、下記の特許文献1には、後方撮影部で撮像された後方映像と、前方撮影部で撮像された前方映像とを、車両の進行方向に応じて自動的に切り替えて表示する運転支援表示装置が開示されている。
【0003】
この運転支援表示装置には、表示映像の切り替え操作を無効にするためのキャンセルスイッチが設けられている。このため、運転者が駐車等を行う際に、前進中でも後方映像を表示させたくて前方映像への切り替え表示を望まない場合に、このキャンセルスイッチを用いてこの切り替え表示をキャンセルすることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−193699号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
運転者が駐車を行う際は、車両の周辺環境に注意して慎重な運転操作が要求されるが、特許文献1に記載の運転支援表示装置では、キャンセルスイッチの操作という通常の運転操作以外の操作を運転者に行わせる必要が生じるため、運転者に煩わしさを与えてしまい利便性が低いという問題がある。
【0006】
そこで、本発明は、運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができる運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係る運転支援装置は、車両の周辺状況と当該車両の状態とに応じて画像を切り替えて表示する運転支援装置であって、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態でない場合に、当該車両の後方画像を表示する表示手段を備えることを特徴とする。
【0008】
この運転支援装置は、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態でない場合に、当該車両の後方画像を表示する。これにより、当該車両がイグニッションオン状態後の最初の前進走行状態でなく即ち駐車中から前方へ出発する状態でない場合、且つ、当該車両の周辺に物体が検出された場合、後方画像を表示させるための操作を運転者が行うことなく、後方画像を適切に表示させることが可能になる。この結果、運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができるようになる。
【0009】
また、表示手段は、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態である場合に、当該車両の前方画像又は全方位画像を表示するのも好ましい。
【0010】
これにより、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態である場合に、当該車両の前方画像又は全方位画像を表示する。このため、当該車両がイグニッションオン状態後の最初の前進走行状態であり即ち駐車中から前方へ出発する状態の場合、且つ、当該車両の周辺に物体が検出された場合、前方画像又は全方位画像を表示させるための操作を運転者が行うことなく、前方画像又は全方位画像に適切に切り替えて表示させることが可能になる。この結果、運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができるようになる。
【発明の効果】
【0011】
本発明によれば、運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができる運転支援装置を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の運転支援装置のシステム構成の概略を説明するための構成概略図である。
【図2】本発明の運転支援装置で実行される表示画面の切り替え処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、添付図面を参照しながら本発明の好適な実施形態を説明する。なお、図面の説明において同一要素には同一符号を付し、重複する説明を省略する。
【0014】
(1)運転支援装置の構成
まず、本実施形態である運転支援装置の構成について、図1を用いて説明する。図1は、運転支援装置100のシステム構成の概略を説明するための構成概略図である。運転支援装置100は、例えば自動車等の移動体車両(以下、自車両)に搭載され、自車両の周辺状況と当該自車両の状態とに応じてカメラ画像を切り替えてドライバ(運転者)に表示することによって運転を支援する周辺監視系システム装置である。以下、自車両はAT車両(即ち、オートマチックトランスミッション車両)であるとして説明する。
【0015】
運転支援装置100による機能は、例えば、自車両の内部に搭載された電子制御装置であるECUにより実現される。ECUは、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(RandomAccess Memory)などからなるマイクロコンピュータを主要構成部品とするユニットである。
【0016】
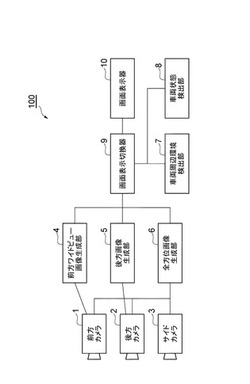
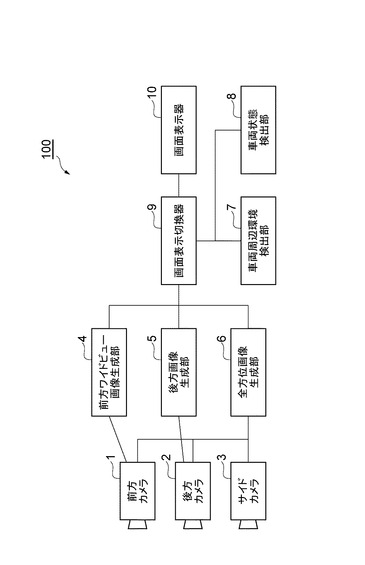
図1に示されるように、運転支援装置100は、前方カメラ1(前方撮像手段)、後方カメラ2(後方撮像手段)、サイドカメラ3(側方撮像手段)、前方ワイドビュー画像生成部4(前方生成手段)、後方画像生成部5(後方生成手段)、全方位画像生成部6(全方位生成手段)、車両周辺環境検出部7(周辺検出手段)、車両状態検出部8(状態検出手段)、画面表示切換器9(切替手段及び表示手段)、及び画面表示器10(表示手段)を備えている。
【0017】
前方カメラ1、後方カメラ2、及びサイドカメラ3は、超広角のカメラであり、例えば魚眼カメラである。これら3台のカメラのそれぞれは、車両前方周辺及び前側方周辺を撮像するもの、車両後方周辺及び後側方周辺を撮像するもの、車両左側方周辺及び右側方周辺を撮像するものとして設置されている。
【0018】
前方ワイドビュー画像生成部4は、前方カメラ1により撮像された画像を、ドライバに対して表示させるのに適したワイドビュー形式(前方画像)に変換して生成する変換処理部分である。
【0019】
後方画像生成部5は、後方カメラ2により撮像された画像を、ドライバに対して表示させるのに適した形式(後方画像)に変換して生成する変換処理部分である。
【0020】
全方位画像生成部6は、前方カメラ1、後方カメラ2、及びサイドカメラ3により撮像された画像を、ドライバに対して表示させるのに適した(車両周辺の)全方位表示形式(全方位画像)に変換して生成する変換処理部分である。
【0021】
車両周辺環境検出部7は、前方カメラ1、後方カメラ2、及びサイドカメラ3により撮像された画像を用いて、自車両の周辺環境において(自車両にとっての障害物を含む)物体が検出されたか否かを判定する演算処理部分である。物体が認識されたか否かを示すこの判定結果に関するデータは、画面表示切換器9に送信される。なお、このデータには、物体が認識された場合の、自車両から当該物体までの距離に関する情報が含まれている。
【0022】
車両状態検出部8は、自車両のシフトポジションの位置の特定や、画面表示器10による表示画面の特定及び表示時間の計測や、自車両のイグニッションスイッチのオン又はオフ状態の特定や、自車両の走行方向(例えば、前進や後退等)の特定や、自車両の走行速度の計測等といった、自車両の状況を検出する演算処理部分である。自車両の状態を示すこの検出結果に関するデータは、画面表示切換器9に送信される。
【0023】
画面表示切換器9は、車両周辺環境検出部7から受信した上記の判定結果に関するデータと、車両状態検出部8から受信した上記の検出結果に関するデータを用いて、画面表示器10による表示画面を切り替えるスイッチ処理部分である。
【0024】
より詳しくは、画面表示切換器9は、シフトポジションがシフトR(リバース:後退)以外の位置であって更に画面表示器10による後方画像の表示時間が現時点で所定時間(例えば、数秒間)以内の状態の場合であり、且つ、車両周辺環境検出部7により自車両の周辺に物体が検出されて更に自車両がイグニッションオン状態後の最初の前進走行でない状態の場合に、画面表示器10による表示画面を自車両の後方画像を表示させる。
【0025】
また、画面表示切換器9は、シフトポジションがシフトR(リバース:後退)以外の位置であって更に画面表示器10による後方画像の表示時間が現時点で所定時間(例えば、数秒間)以内の状態の場合であり、且つ、車両周辺環境検出部7により自車両の周辺に物体が検出されて更に自車両がイグニッションオン状態後の最初の前進走行である状態の場合に、画面表示器10による表示画面を自車両の前方画像又は全方位画像に切り替えて表示させる。
【0026】
画面表示器10は、画面表示切換器9からの指示信号により自車両の前方画像、全方位画像、又は後方画像をドライバに対して表示するディスプレイ部分である。
【0027】
(2)運転支援装置における表示画面の切り替え処理の流れ
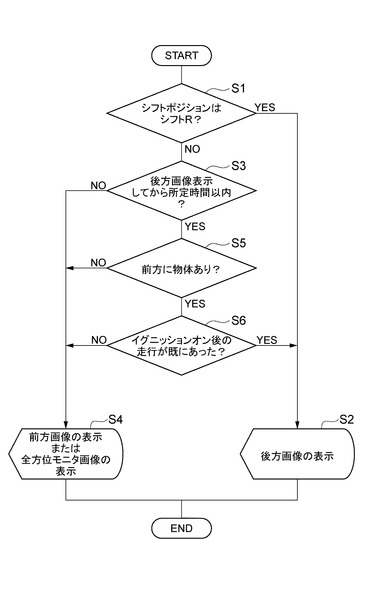
次に、運転支援装置100で実行される表示画面の切り替え処理の流れ(運転支援方法)について、図2を用いて説明する。図2は、運転支援装置100で実行される表示画面の切り替え処理の流れを示すフローチャートである。図2のフローチャートに示される処理は、主として上記したECUによって行われるものであり、運転支援装置100の電源がオンされてからオフされるまでの間、所定のタイミングで繰り返し実行される。
【0028】
なお、前方カメラ1、後方カメラ2、及びサイドカメラ3による撮像と、撮像された画像の前方ワイドビュー画像生成部4、後方画像生成部5、及び全方位画像生成部6による変換とは、運転支援装置100の電源がオンされてからオフされるまでの間、随時行われている。
【0029】
まず、車両状態検出部8が、自車両のシフトポジションの位置を特定する検出処理を行い、画面表示切換器9が、車両状態検出部8から受信したこの検出結果に関するデータを用いて、シフトポジションはシフトR(リバース:後退)であるか否かを判定する(ステップS1)。シフトポジションはシフトRであった場合、画面表示器10が、画面表示切換器9からの指示信号により自車両の後方画像を表示する(ステップS2)。
【0030】
一方、シフトポジションはシフトRでなかった場合(例えば、前進状態となるシフトDや、ニュートラル状態となるシフトNの場合)、後述のステップS3に移行する。
【0031】
ステップS3では、車両状態検出部8が、画面表示器10による表示画面の特定及び表示時間の計測を含む検出処理を行い、画面表示切換器9が、車両状態検出部8から受信したこの検出結果に関するデータを用いて、後方画像が現時点で表示されている場合に、この後方画像の表示が開始されてから所定時間(例えば、数秒間)以内であるか否かを判定する。後方画像が現時点で表示されてない場合や、後方画像が現時点で表示されていても表示が開始されてからこの所定時間を超過している場合は、画面表示器10が、画面表示切換器9からの指示信号により自車両の前方画像又は全方位画像(全方位モニタ画像)を表示する(ステップS4)。
【0032】
一方、後方画像が現時点で表示されていて表示が開始されてから所定時間以内である場合、後述のステップS5に移行する。
【0033】
ステップS5では、車両周辺環境検出部7が、前方カメラ1、後方カメラ2、及びサイドカメラ3により撮像された画像を用いて、自車両から所定距離内の周辺(例えば、自車両から前方1m以内)に物体が検出されたか否かを判定する。自車両の周辺に物体が検出されなかった場合は、画面表示器10が、画面表示切換器9からの指示信号により自車両の前方画像又は全方位画像(全方位モニタ画像)を表示する(ステップS4)。なお、自車両の周辺に動いている物体(例えば、移動中の障害物)が検出された場合は、画面表示器10が、画面表示切換器9からの指示信号により自車両の前方画像又は全方位画像(全方位モニタ画像)を表示してもよい。
【0034】
一方、自車両の周辺に物体が検出された場合、後述のステップS6に移行する。
【0035】
ステップS6では、車両状態検出部8が、現時点での自車両のイグニッションスイッチのオン又はオフ状態を特定するとともに現時点での自車両の走行方向を特定する検出処理を行い、画面表示切換器9が、車両状態検出部8から受信したこの検出結果に関するデータを用いて、現時点でイグニッションオン状態後の最初の前進走行が既にあったか否かを判定する。現時点でイグニッションオン状態後の最初の前進走行が既にあった場合、即ち、イグニッションオン状態となった後の最初の前進走行でない状態の場合に、画面表示器10が、画面表示切換器9からの指示信号により自車両の後方画像を表示し、一連の処理が終了する。
【0036】
一方、現時点でイグニッションオン状態後の最初の前進走行が未だ無い場合、即ち、イグニッションオン状態となった後の最初の前進走行である状態の場合に、画面表示器10が、画面表示切換器9からの指示信号により自車両の前方画像又は全方位画像を表示し、一連の処理が終了する。
【0037】
(3)運転支援装置による作用及び効果
運転支援装置100は、自車両の周辺に物体が検出された場合、且つ、自車両がイグニッションオン状態後の最初の前進走行状態でない場合に、自車両の後方画像を表示する。これにより、まず、自車両がイグニッションオン状態後の最初の前進走行状態でなく即ち駐車中から前方へ出発する状態でない場合(例えば前進走行状態から後退走行状態となる継続走行サイクルを一回以上経て前進走行中である場合等)、且つ、自車両の周辺に物体が検出された場合、比較的狭いスペースへの縦列駐車を行う時や比較的狭い駐車場での車庫入れを行う時等の切り返し操作中であると画面表示切換器9により判断される。
【0038】
そして、上記の判断の後、この切り返し中にドライバが必要とする後方画像を表示させるための操作をドライバが行うことなく、(ドライバの意思に合致した)後方画像を適切に自動表示させることが可能になる。このように後方画像を自動表示させた結果、後方のスペースがどの程度空いたか(切り返すのに十分な距離だけ離れたか)をドライバに認識させることになり、ドライバが自車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができるようになる。
【0039】
また、運転支援装置100は、自車両の周辺に物体が検出された場合、且つ、自車両がイグニッションオン状態後の最初の前進走行状態である場合に、自車両の前方画像又は全方位画像を表示する。これにより、まず、自車両がイグニッションオン状態後の最初の前進走行状態であり即ち駐車中から前方へ出発する状態の場合、且つ、自車両の周辺に物体が検出された場合、縦列駐車といった駐車中からの出発であると画面表示切換器9により判断される。
【0040】
そして、上記の判断の後、この駐車中からの前方発進時に、後方を気にする必要の無くなったドライバが必要とする前方画像又は全方位画像に切り替えて表示させるための操作をドライバが行うことなく、(ドライバの意思に合致した)前方画像又は全方位画像に適切に切り替えて自動表示させることが可能になる。このように前方画像又は全方位画像に切り替えて自動表示させた結果、前方発進しようとするドライバが自車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができるようになる。
【0041】
(4)変形例
上記の実施例では、自車両はAT車両(即ち、オートマチックトランスミッション車両)であるとして説明したが、MT車両(即ち、マニュアルトランスミッション車両)であってもよく、このとき、上記の、「シフトポジションがシフトR以外の位置」の場合とはローギアの場合を指す。
【産業上の利用可能性】
【0042】
本発明によれば、運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができる運転支援装置を提供することができる。
【符号の説明】
【0043】
1…前方カメラ、2…後方カメラ、3…サイドカメラ、4…前方ワイドビュー画像生成部、5…後方画像生成部、6…全方位画像生成部、7…車両周辺環境検出部、8…車両状態検出部、9…画面表示切換器、10…画面表示器、100…運転支援装置。
【技術分野】
【0001】
本発明は、車両の周辺状況と当該車両の状態とに応じて画像を切り替えて表示する運転支援装置に関する。
【背景技術】
【0002】
従来、運転者に対して自車両周辺の画像を表示する装置が提案されている。例えば、下記の特許文献1には、後方撮影部で撮像された後方映像と、前方撮影部で撮像された前方映像とを、車両の進行方向に応じて自動的に切り替えて表示する運転支援表示装置が開示されている。
【0003】
この運転支援表示装置には、表示映像の切り替え操作を無効にするためのキャンセルスイッチが設けられている。このため、運転者が駐車等を行う際に、前進中でも後方映像を表示させたくて前方映像への切り替え表示を望まない場合に、このキャンセルスイッチを用いてこの切り替え表示をキャンセルすることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−193699号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
運転者が駐車を行う際は、車両の周辺環境に注意して慎重な運転操作が要求されるが、特許文献1に記載の運転支援表示装置では、キャンセルスイッチの操作という通常の運転操作以外の操作を運転者に行わせる必要が生じるため、運転者に煩わしさを与えてしまい利便性が低いという問題がある。
【0006】
そこで、本発明は、運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができる運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係る運転支援装置は、車両の周辺状況と当該車両の状態とに応じて画像を切り替えて表示する運転支援装置であって、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態でない場合に、当該車両の後方画像を表示する表示手段を備えることを特徴とする。
【0008】
この運転支援装置は、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態でない場合に、当該車両の後方画像を表示する。これにより、当該車両がイグニッションオン状態後の最初の前進走行状態でなく即ち駐車中から前方へ出発する状態でない場合、且つ、当該車両の周辺に物体が検出された場合、後方画像を表示させるための操作を運転者が行うことなく、後方画像を適切に表示させることが可能になる。この結果、運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができるようになる。
【0009】
また、表示手段は、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態である場合に、当該車両の前方画像又は全方位画像を表示するのも好ましい。
【0010】
これにより、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態である場合に、当該車両の前方画像又は全方位画像を表示する。このため、当該車両がイグニッションオン状態後の最初の前進走行状態であり即ち駐車中から前方へ出発する状態の場合、且つ、当該車両の周辺に物体が検出された場合、前方画像又は全方位画像を表示させるための操作を運転者が行うことなく、前方画像又は全方位画像に適切に切り替えて表示させることが可能になる。この結果、運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができるようになる。
【発明の効果】
【0011】
本発明によれば、運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができる運転支援装置を提供することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の運転支援装置のシステム構成の概略を説明するための構成概略図である。
【図2】本発明の運転支援装置で実行される表示画面の切り替え処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、添付図面を参照しながら本発明の好適な実施形態を説明する。なお、図面の説明において同一要素には同一符号を付し、重複する説明を省略する。
【0014】
(1)運転支援装置の構成
まず、本実施形態である運転支援装置の構成について、図1を用いて説明する。図1は、運転支援装置100のシステム構成の概略を説明するための構成概略図である。運転支援装置100は、例えば自動車等の移動体車両(以下、自車両)に搭載され、自車両の周辺状況と当該自車両の状態とに応じてカメラ画像を切り替えてドライバ(運転者)に表示することによって運転を支援する周辺監視系システム装置である。以下、自車両はAT車両(即ち、オートマチックトランスミッション車両)であるとして説明する。
【0015】
運転支援装置100による機能は、例えば、自車両の内部に搭載された電子制御装置であるECUにより実現される。ECUは、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(RandomAccess Memory)などからなるマイクロコンピュータを主要構成部品とするユニットである。
【0016】
図1に示されるように、運転支援装置100は、前方カメラ1(前方撮像手段)、後方カメラ2(後方撮像手段)、サイドカメラ3(側方撮像手段)、前方ワイドビュー画像生成部4(前方生成手段)、後方画像生成部5(後方生成手段)、全方位画像生成部6(全方位生成手段)、車両周辺環境検出部7(周辺検出手段)、車両状態検出部8(状態検出手段)、画面表示切換器9(切替手段及び表示手段)、及び画面表示器10(表示手段)を備えている。
【0017】
前方カメラ1、後方カメラ2、及びサイドカメラ3は、超広角のカメラであり、例えば魚眼カメラである。これら3台のカメラのそれぞれは、車両前方周辺及び前側方周辺を撮像するもの、車両後方周辺及び後側方周辺を撮像するもの、車両左側方周辺及び右側方周辺を撮像するものとして設置されている。
【0018】
前方ワイドビュー画像生成部4は、前方カメラ1により撮像された画像を、ドライバに対して表示させるのに適したワイドビュー形式(前方画像)に変換して生成する変換処理部分である。
【0019】
後方画像生成部5は、後方カメラ2により撮像された画像を、ドライバに対して表示させるのに適した形式(後方画像)に変換して生成する変換処理部分である。
【0020】
全方位画像生成部6は、前方カメラ1、後方カメラ2、及びサイドカメラ3により撮像された画像を、ドライバに対して表示させるのに適した(車両周辺の)全方位表示形式(全方位画像)に変換して生成する変換処理部分である。
【0021】
車両周辺環境検出部7は、前方カメラ1、後方カメラ2、及びサイドカメラ3により撮像された画像を用いて、自車両の周辺環境において(自車両にとっての障害物を含む)物体が検出されたか否かを判定する演算処理部分である。物体が認識されたか否かを示すこの判定結果に関するデータは、画面表示切換器9に送信される。なお、このデータには、物体が認識された場合の、自車両から当該物体までの距離に関する情報が含まれている。
【0022】
車両状態検出部8は、自車両のシフトポジションの位置の特定や、画面表示器10による表示画面の特定及び表示時間の計測や、自車両のイグニッションスイッチのオン又はオフ状態の特定や、自車両の走行方向(例えば、前進や後退等)の特定や、自車両の走行速度の計測等といった、自車両の状況を検出する演算処理部分である。自車両の状態を示すこの検出結果に関するデータは、画面表示切換器9に送信される。
【0023】
画面表示切換器9は、車両周辺環境検出部7から受信した上記の判定結果に関するデータと、車両状態検出部8から受信した上記の検出結果に関するデータを用いて、画面表示器10による表示画面を切り替えるスイッチ処理部分である。
【0024】
より詳しくは、画面表示切換器9は、シフトポジションがシフトR(リバース:後退)以外の位置であって更に画面表示器10による後方画像の表示時間が現時点で所定時間(例えば、数秒間)以内の状態の場合であり、且つ、車両周辺環境検出部7により自車両の周辺に物体が検出されて更に自車両がイグニッションオン状態後の最初の前進走行でない状態の場合に、画面表示器10による表示画面を自車両の後方画像を表示させる。
【0025】
また、画面表示切換器9は、シフトポジションがシフトR(リバース:後退)以外の位置であって更に画面表示器10による後方画像の表示時間が現時点で所定時間(例えば、数秒間)以内の状態の場合であり、且つ、車両周辺環境検出部7により自車両の周辺に物体が検出されて更に自車両がイグニッションオン状態後の最初の前進走行である状態の場合に、画面表示器10による表示画面を自車両の前方画像又は全方位画像に切り替えて表示させる。
【0026】
画面表示器10は、画面表示切換器9からの指示信号により自車両の前方画像、全方位画像、又は後方画像をドライバに対して表示するディスプレイ部分である。
【0027】
(2)運転支援装置における表示画面の切り替え処理の流れ
次に、運転支援装置100で実行される表示画面の切り替え処理の流れ(運転支援方法)について、図2を用いて説明する。図2は、運転支援装置100で実行される表示画面の切り替え処理の流れを示すフローチャートである。図2のフローチャートに示される処理は、主として上記したECUによって行われるものであり、運転支援装置100の電源がオンされてからオフされるまでの間、所定のタイミングで繰り返し実行される。
【0028】
なお、前方カメラ1、後方カメラ2、及びサイドカメラ3による撮像と、撮像された画像の前方ワイドビュー画像生成部4、後方画像生成部5、及び全方位画像生成部6による変換とは、運転支援装置100の電源がオンされてからオフされるまでの間、随時行われている。
【0029】
まず、車両状態検出部8が、自車両のシフトポジションの位置を特定する検出処理を行い、画面表示切換器9が、車両状態検出部8から受信したこの検出結果に関するデータを用いて、シフトポジションはシフトR(リバース:後退)であるか否かを判定する(ステップS1)。シフトポジションはシフトRであった場合、画面表示器10が、画面表示切換器9からの指示信号により自車両の後方画像を表示する(ステップS2)。
【0030】
一方、シフトポジションはシフトRでなかった場合(例えば、前進状態となるシフトDや、ニュートラル状態となるシフトNの場合)、後述のステップS3に移行する。
【0031】
ステップS3では、車両状態検出部8が、画面表示器10による表示画面の特定及び表示時間の計測を含む検出処理を行い、画面表示切換器9が、車両状態検出部8から受信したこの検出結果に関するデータを用いて、後方画像が現時点で表示されている場合に、この後方画像の表示が開始されてから所定時間(例えば、数秒間)以内であるか否かを判定する。後方画像が現時点で表示されてない場合や、後方画像が現時点で表示されていても表示が開始されてからこの所定時間を超過している場合は、画面表示器10が、画面表示切換器9からの指示信号により自車両の前方画像又は全方位画像(全方位モニタ画像)を表示する(ステップS4)。
【0032】
一方、後方画像が現時点で表示されていて表示が開始されてから所定時間以内である場合、後述のステップS5に移行する。
【0033】
ステップS5では、車両周辺環境検出部7が、前方カメラ1、後方カメラ2、及びサイドカメラ3により撮像された画像を用いて、自車両から所定距離内の周辺(例えば、自車両から前方1m以内)に物体が検出されたか否かを判定する。自車両の周辺に物体が検出されなかった場合は、画面表示器10が、画面表示切換器9からの指示信号により自車両の前方画像又は全方位画像(全方位モニタ画像)を表示する(ステップS4)。なお、自車両の周辺に動いている物体(例えば、移動中の障害物)が検出された場合は、画面表示器10が、画面表示切換器9からの指示信号により自車両の前方画像又は全方位画像(全方位モニタ画像)を表示してもよい。
【0034】
一方、自車両の周辺に物体が検出された場合、後述のステップS6に移行する。
【0035】
ステップS6では、車両状態検出部8が、現時点での自車両のイグニッションスイッチのオン又はオフ状態を特定するとともに現時点での自車両の走行方向を特定する検出処理を行い、画面表示切換器9が、車両状態検出部8から受信したこの検出結果に関するデータを用いて、現時点でイグニッションオン状態後の最初の前進走行が既にあったか否かを判定する。現時点でイグニッションオン状態後の最初の前進走行が既にあった場合、即ち、イグニッションオン状態となった後の最初の前進走行でない状態の場合に、画面表示器10が、画面表示切換器9からの指示信号により自車両の後方画像を表示し、一連の処理が終了する。
【0036】
一方、現時点でイグニッションオン状態後の最初の前進走行が未だ無い場合、即ち、イグニッションオン状態となった後の最初の前進走行である状態の場合に、画面表示器10が、画面表示切換器9からの指示信号により自車両の前方画像又は全方位画像を表示し、一連の処理が終了する。
【0037】
(3)運転支援装置による作用及び効果
運転支援装置100は、自車両の周辺に物体が検出された場合、且つ、自車両がイグニッションオン状態後の最初の前進走行状態でない場合に、自車両の後方画像を表示する。これにより、まず、自車両がイグニッションオン状態後の最初の前進走行状態でなく即ち駐車中から前方へ出発する状態でない場合(例えば前進走行状態から後退走行状態となる継続走行サイクルを一回以上経て前進走行中である場合等)、且つ、自車両の周辺に物体が検出された場合、比較的狭いスペースへの縦列駐車を行う時や比較的狭い駐車場での車庫入れを行う時等の切り返し操作中であると画面表示切換器9により判断される。
【0038】
そして、上記の判断の後、この切り返し中にドライバが必要とする後方画像を表示させるための操作をドライバが行うことなく、(ドライバの意思に合致した)後方画像を適切に自動表示させることが可能になる。このように後方画像を自動表示させた結果、後方のスペースがどの程度空いたか(切り返すのに十分な距離だけ離れたか)をドライバに認識させることになり、ドライバが自車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができるようになる。
【0039】
また、運転支援装置100は、自車両の周辺に物体が検出された場合、且つ、自車両がイグニッションオン状態後の最初の前進走行状態である場合に、自車両の前方画像又は全方位画像を表示する。これにより、まず、自車両がイグニッションオン状態後の最初の前進走行状態であり即ち駐車中から前方へ出発する状態の場合、且つ、自車両の周辺に物体が検出された場合、縦列駐車といった駐車中からの出発であると画面表示切換器9により判断される。
【0040】
そして、上記の判断の後、この駐車中からの前方発進時に、後方を気にする必要の無くなったドライバが必要とする前方画像又は全方位画像に切り替えて表示させるための操作をドライバが行うことなく、(ドライバの意思に合致した)前方画像又は全方位画像に適切に切り替えて自動表示させることが可能になる。このように前方画像又は全方位画像に切り替えて自動表示させた結果、前方発進しようとするドライバが自車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができるようになる。
【0041】
(4)変形例
上記の実施例では、自車両はAT車両(即ち、オートマチックトランスミッション車両)であるとして説明したが、MT車両(即ち、マニュアルトランスミッション車両)であってもよく、このとき、上記の、「シフトポジションがシフトR以外の位置」の場合とはローギアの場合を指す。
【産業上の利用可能性】
【0042】
本発明によれば、運転者が車両の周辺環境に注意して慎重に運転操作を行う際の利便性がより高い運転支援を行うことができる運転支援装置を提供することができる。
【符号の説明】
【0043】
1…前方カメラ、2…後方カメラ、3…サイドカメラ、4…前方ワイドビュー画像生成部、5…後方画像生成部、6…全方位画像生成部、7…車両周辺環境検出部、8…車両状態検出部、9…画面表示切換器、10…画面表示器、100…運転支援装置。
【特許請求の範囲】
【請求項1】
車両の周辺状況と当該車両の状態とに応じて画像を切り替えて表示する運転支援装置であって、
当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態でない場合に、当該車両の後方画像を表示する表示手段を備えることを特徴とする運転支援装置。
【請求項2】
前記表示手段は、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態である場合に、当該車両の前方画像又は全方位画像を表示する、ことを特徴とする請求項1に記載の運転支援装置。
【請求項1】
車両の周辺状況と当該車両の状態とに応じて画像を切り替えて表示する運転支援装置であって、
当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態でない場合に、当該車両の後方画像を表示する表示手段を備えることを特徴とする運転支援装置。
【請求項2】
前記表示手段は、当該車両の周辺に物体が検出された場合、且つ、当該車両がイグニッションオン状態後の最初の前進走行状態である場合に、当該車両の前方画像又は全方位画像を表示する、ことを特徴とする請求項1に記載の運転支援装置。
【図1】


【図2】
【図2】
【公開番号】特開2013−60057(P2013−60057A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−198579(P2011−198579)
【出願日】平成23年9月12日(2011.9.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月12日(2011.9.12)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]