
道路測量方法及び道路線形情報生成方法
【課題】道路のカーブ区間を測量する際に測量精度を確保しつつカーブ区間を効率良く測量することができる道路測量方法及び道路線形情報生成方法を提供する。
【解決手段】道路1のカーブ区間1aを測量する際に、地図8上でカーブ区間1aの曲率半径Rを計測する。測量ピッチPの上限値Pu及び下限値Pdが曲率半径Rに応じて定められた参照テーブル9に基づいて、上限値Puと下限値Pdとの間で測量ピッチPを選定し、この測量ピッチPによりカーブ区間1aを測量する。
【解決手段】道路1のカーブ区間1aを測量する際に、地図8上でカーブ区間1aの曲率半径Rを計測する。測量ピッチPの上限値Pu及び下限値Pdが曲率半径Rに応じて定められた参照テーブル9に基づいて、上限値Puと下限値Pdとの間で測量ピッチPを選定し、この測量ピッチPによりカーブ区間1aを測量する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に提供される道路線形情報を生成するために行われる道路測量方法及び道路線形情報生成方法に関する。
【背景技術】
【0002】
従来、交差点内及びその近傍での車両による交通事故を防ぐために、例えば交差点の上流側に設置された光ビーコンの通信領域から交差点の停止線までの距離情報、及び信号灯色の切替タイミングに関する信号情報を車両に搭載された車載機に提供し、車載機がその情報に基づいて前記交差点の手前で安全に停止できるか否か、前記交差点を安全に通過できるか否かを判断し、運転手に音声などで注意を促したり、その判断に基づいて車両のブレーキ介入を実行したりする安全運転の支援制御を行う装置がある(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−293660号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
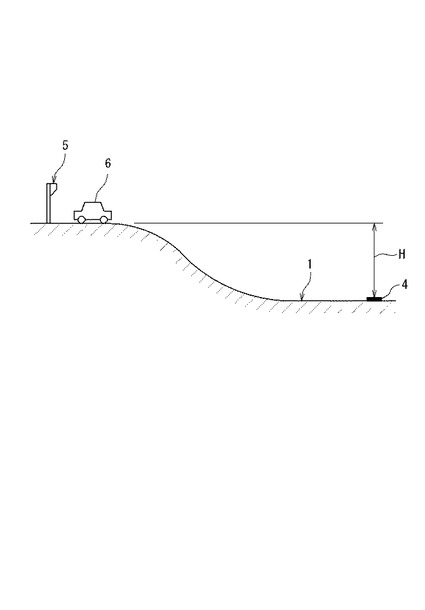
前記支援制御を正確に行うためには、交差点の停止線までの距離情報が正確である必要がある。この場合、停止線までの距離を市販の平面地図データに基づいて算出することもできるが、この平面距離は、道路の高低差H(図2参照)を考慮してないので、車両が交差点の停止線まで実際に走行する道のり距離を正確に反映していない。
【0005】
そこで、測量機器を用いて道路の三次元位置を実際に測量し、この測量データに基づいて光ビーコンの通信領域から停止線までの正確な道のり距離を算出する必要がある。その際、例えば光ビーコンの通信領域から停止線までにカーブ区間が存在する場合、このカーブ区間における測量ピッチを小さくすればするほどカーブ区間の測量を高精度に行うことはできるが、その反面、作業効率が低下するという問題が生じる。
【0006】
本発明は、前記問題点に鑑みてなされたものであり、道路のカーブ区間を測量する際に測量精度を確保しつつカーブ区間を効率良く測量することができる道路測量方法及び道路線形情報生成方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明の道路測量方法は、道路のカーブ区間を測量する道路測量方法であって、前記カーブ区間を測量する測量ピッチの上限値及び下限値が前記カーブ区間の曲率半径に応じて定められた参照テーブルに基づいて、前記測量ピッチを前記上限値と前記下限値との間で選定し、選定した前記測量ピッチにより前記カーブ区間を測量することを特徴とする。
【0008】
本発明の道路測量方法によれば、道路のカーブ区間を測量する際に、カーブ区間の曲率半径に応じて定められた測量ピッチの上限値と下限値との間で適切な測量ピッチを選定することができる。これにより、前記上限値を上回る測量ピッチで測量されるのを抑制することができるため、測量精度が低下するのを抑制することができる。また、前記下限値を下回る測量ピッチで測量されるのを抑制することができるため、被測量点が多くなり過ぎるのを抑制することができる。したがって、道路のカーブ区間を測量する際に測量精度を確保しつつカーブ区間を効率良く測量することができる。
【0009】
(2)また、前記測量ピッチの前記上限値及び前記下限値は、被測量点間を直線で連結した仮想直線群と、前記曲率半径により形成される仮想円周線との離反距離が所定範囲内に収まるように定められることが好ましい。この場合は、実際に測量される被測量点間を直線で連結した仮想直線群と、カーブ区間の曲率半径により形成される仮想円周線との離反距離を所定範囲内に納まるように測量することができるため、カーブ区間の測量精度が低下するのを効果的に抑制することができる。
【0010】
(3)また、前記道路測量方法では、前記曲率半径を、国土地理院で定められた公共測量作業規定に準拠して作成された地図上で計測することが好ましい。この場合は、曲率半径を正確に計測することができるため、この曲率半径に応じた測量ピッチを正確に選定することができる。
【0011】
(4)本発明の道路線形情報生成方法は、前述の測量方法により得られた前記カーブ区間の座標に基づいて道路線形情報を生成することを特徴とする。
本発明によれば、前述した測量方法により測量されたカーブ区間の座標に基づいて道路線形情報を正確に生成することができる。
【発明の効果】
【0012】
本発明によれば、道路のカーブ区間を測量する際に、測量精度が低下するのを抑制することができるとともに、被測量点が多くなり過ぎるのを抑制することができる。したがって、道路のカーブ区間を測量する際に測量精度を確保しつつカーブ区間を効率良く測量することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る道路測量方法により測量が行われる道路の平面図である。
【図2】図1の道路の側断面図である。
【図3】図1の道路のカーブ区間を示す地図である。
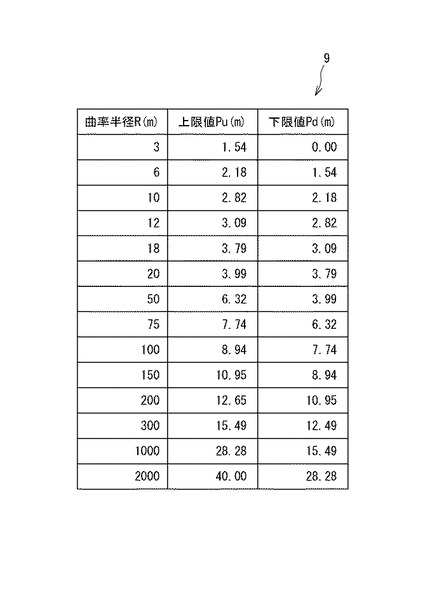
【図4】測量ピッチの上限値及び下限値がカーブ区間の曲率半径に応じて定められた参照テーブルを示す図である。
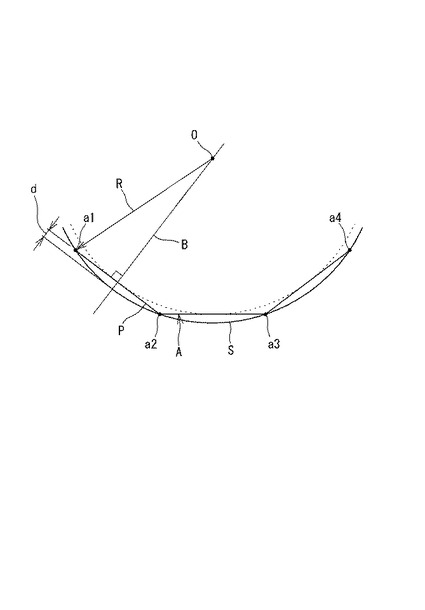
【図5】測量ピッチの上限値及び下限値を定める際に用いられる仮想直線群と仮想円周線を示す図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態を図面に基づいて説明する。
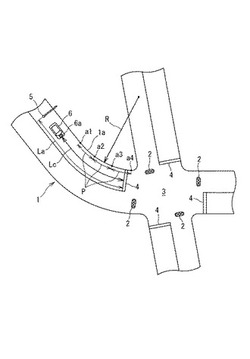
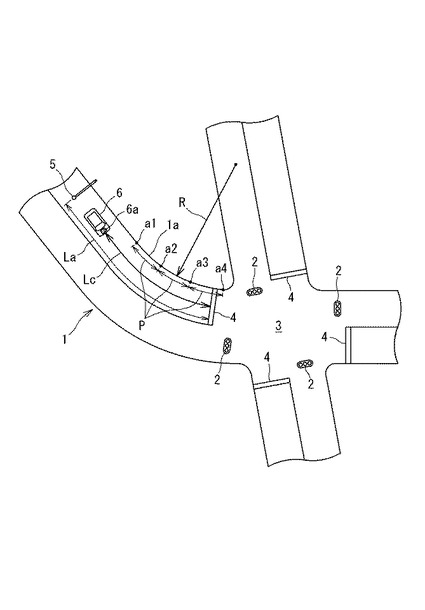
図1は本発明の一実施形態に係る道路測量方法により測量が行われる道路の平面図であり、図2は図1の道路の側断面図である。図1の道路1において、信号機2が設置された交差点3の手前には停止線4が設けられている。交差点3の上流側には、停止線4から所定距離を空けて光ビーコン5が設置されている。停止線4と光ビーコン5との間の道路1には、カーブ区間1aが設けられている。
【0015】
光ビーコン5は、車両6とその直下よりやや上流側の通信領域において、静的情報と動的情報とを含むダウンリンク信号を車両6に搭載された車載機6aへ送信する。ここで、静的情報とは、時間の経過とともに内容が変動しない情報であり、動的情報とは、時間の経過とともに内容が変動する情報である。静的情報としては、例えば道路の形状に関する道路形状情報が挙げられる。道路形状情報とは、例えば、光ビーコン5よりも少し上流側にある光ビーコン5と車載機6aとの路車間通信領域の上流端から停止線4までの道路の車線数、道路の高低差H(図2参照)、道路の道のり距離(前記高低差Hを考慮した距離)La等を含む情報である。この道路線形情報は、例えば各光ビーコン5に記憶されている。動的情報としては、例えば信号情報が挙げられる。信号情報とは、例えば、信号機2の黄信号開始時点、黄信号時間、赤信号時間等の信号灯色の切替タイミングに関する情報を指す。
【0016】
車載機6aは、光ビーコン5から受信した道路線形情報に基づいて、現走行位置から車両進行方向前方の停止線4までの距離Lcを求める。そして、この距離Lcと前記信号情報に基づいて、交差点3を安全に通過若しくは停止できるか否かを車載機6aが判断し、その判断に基づいて車両6に対してブレーキ介入を実行する安全運転の支援制御を行う。例えば、交差点3の手前で安全に停止できると判断した場合には、停止線4までの距離Lcに基づいて、車両6を徐々に減速させ、前記距離Lcを進んだ時点で車両6の速度がゼロとなるように支援制御する。
【0017】
次に、光ビーコン5から道路線形情報として提供される道路1の道のり距離Laを算出するために行われる道路1の測量方法について、図面を参照しながら説明する。本実施形態では、図1に示すように、主にカーブ区間1aの三次元位置を、図示しないトータルステーションを用いて測量する場合について説明する。ここで、トータルステーションとは、光波測角儀(トランシット)と光波測距儀の機能を併せ持つ光波測距測角儀であり、内蔵のコンピュータにより測量データの記録、座標の計算、出力までを自動的に行うものである。なお、本実施形態のトータルステーションは、視準点として反射プリズムの設置を必要としない所謂ノンプリズム方式の測距機能を有するものである。
【0018】
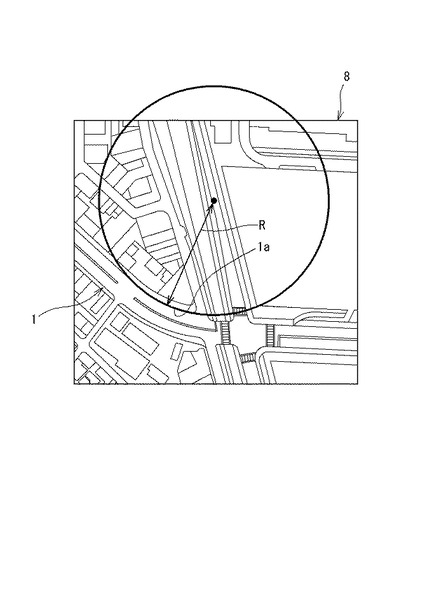
まず、実際に測量する前に、地図上においてカーブ区間1aの曲率半径Rを計測する。図3は、図1の道路1のカーブ区間1aを示す地図8である。この地図8は、精度誤差を事前に把握できるものが推奨され、より望ましくは国土地理院で定められた公共測量作業規定に準拠して作成されたものが推奨される。本実施形態の地図8は、自治体から発行されたものであって、前記公共測量作業規定に準拠して例えば1/2500の縮尺で作成されたものである。この地図8上に記載されているカーブ区間1aにR定規等のテンプレート(図示省略)を置いてカーブ区間1aの曲率半径Rを計測する。
【0019】
次に、図4に示す参照テーブル9に基づいて、計測された曲率半径Rに対応する測量ピッチP(カーブ区間1aにおける被測量点間のピッチ)を選定する。参照テーブル9は、測量ピッチPの上限値Pu及び下限値Pdがカーブ区間1aの曲率半径Rに応じて定められた一覧表である。この上限値Pu及び下限値Pdは、図5に示すように、複数の被測量点a1〜a4間を直線で連結した仮想直線群Aと、曲率半径Rにより形成される仮想円周線Sとの離反距離dが所定範囲内に収まるように定められている。
【0020】
具体的には図5に示すように、曲率半径Rと、仮想直線群Aの線分a1〜a2の測量ピッチPと、測量ピッチPに対する法線であってかつ仮想円周線Sの中心点Oを通過する直線Bとより形成される直角三角形に着目すると、R2=(P/2)2+(R−d)2の関係が成り立つことから、測量ピッチPは曲率半径R及び離反距離dを用いると、下記式(1)により表すことができる。
P=2×SQRT(R2−(R−d)2) ・・・(1)
ここで、SQRTは、かっこ内の数式で求めた値の平方根を計算するための演算子を表す。
【0021】
測量ピッチPの上限値Puは、上記(1)式において離反距離dを前記所定範囲の最大値に設定することにより算出することができる。図4の参照テーブル9では、離反距離dの最大値を100mmに設定して、各曲率半径Rに対応する上限値Puを上記(1)式を用いて算出している。
【0022】
測量ピッチPの下限値Pdは、上記(1)式において離反距離dを前記所定範囲の最小値に設定することにより算出することができる。図4の参照テーブル9では、各曲率半径Rに対応する下限値Pdが一回り小さい曲率半径Rに対応する上限値Puと同一の値となるように、前記最小値が設定されている。例えば、曲率半径Rが150mの下限値Pdは、離反距離dの最小値を66.67mmに設定して、曲率半径Rが一回り小さい100mに対応する上限値Puと同一の値である8.94mに設定されている。
【0023】
以上のように定められた参照テーブル9に基づいて、計測された曲率半径Rに対応する測量ピッチPの上限値Puと下限値Pdとの間で、実際に測量する測量ピッチPを選定する。例えば、曲率半径Rが150mの場合は、参照テーブル9の上限値Puは10.95m、下限値Pdは8.94mとなるため、実際に測量する測量ピッチPを例えば10.00mとして選定する。
【0024】
測量ピッチPを選定した後は、図1に示すように、光ビーコン5よりも少し上流側にある光ビーコン5と車載機6aとの路車間通信領域の上流端から停止線4までの道路1における道路縁の三次元位置をトータルステーションにより測量する。その際、カーブ区間1aの測量は、上記選定した測量ピッチPにより定める各被測量点a1〜a4を前述のノンプリズム方式で測量を行う。
【0025】
具体的には、トータルステーションから各被測量点a1〜a4に向けて赤外レーザ光を出射し、各被測量点a1〜a4において反射した反射光を受光して測距・測角する。測距・測角後は、これによって得られた角度及び距離から各被測量点a1〜a4の三次元位置の座標を計算し、この座標データを測量結果としてトータルステーションに記録する。
【0026】
トータルステーションにより道路1の光ビーコン5よりも少し上流側にある光ビーコン5と車載機6aとの路車間通信領域の上流端から停止線4までの間の測量が完了すると、トータルステーションに記録された座標データに基づいて、道路線形情報を生成する。具体的には、トータルステーションに記憶された各被測量点a1〜a4等の三次元位置に基づいて、コンピュータ上でカーブ区間1aを含む道路1の形状を再現する。そして、光ビーコン5よりも少し上流側にある光ビーコン5と車載機6aとの路車間通信領域の上流端から停止線4までの高低差Hを計算し、この高低差Hに基づいて道のり距離Laを算出する。
【0027】
このような方法により、道路線形情報の作成対象となるカーブ区間1aの路肩部分、各車線を区切る境界線や中央線を順次測量していき、離散的な被測量点の絶対座標に基づいてコンピュータ上に道路形状を再現させる。
そして、再現させた道路形状の各車線の左右両端の位置から車線中央を通る中心線を求め、その中心線上に設けた離散点に関する情報(離散点間の距離等)を道路線形情報に含める。
道路線形情報を受信した車両6の車載機6aは、自己が走行している車線の番号を光ビーコン5との路車間通信によって取得することができるので、受信した道路線形情報のうち、自己が走行している車線番号に対応する道路線形情報を読み出すことが可能である。従って、走行車線に対応する前記中心線上の離散点に関する情報を順番に読み込んで、それらの離散点間の距離を合計することで停止線までの道のりを精度よく把握することが可能になる。
【0028】
以上、本発明の実施形態に係る道路測量方法によれば、道路1のカーブ区間1aを測量する際に、カーブ区間1aの曲率半径Rに応じて定められた測量ピッチPの上限値Puと下限値Pdとの間で適切な測量ピッチPを選定することができる。これにより、上限値Puを上回る測量ピッチで測量されるのを抑制することができるため、測量精度が低下するのを抑制することができる。また、下限値Pdを下回る測量ピッチで測量されるのを抑制することができるため、被測量点が多くなり過ぎるのを抑制することができる。したがって、道路1のカーブ区間1aを測量する際に測量精度を確保しつつカーブ区間1aを効率良く測量することができる。
【0029】
また、実際に測量される各被測量点a1〜a4間を直線で連結した仮想直線群Aと、カーブ区間1aの曲率半径Rにより形成される仮想円周線Sとの離反距離dを所定範囲内に納まるように測量することができるため、カーブ区間1aの測量精度が低下するのを効果的に抑制することができる。
【0030】
また、曲率半径Rを、国土地理院で定められた公共測量作業規定に準拠して作成された地図8上で計測するようにしたので、曲率半径Rを正確に計測することができる。したがって、この曲率半径Rに応じた測量ピッチPを正確に選定することができる。
【0031】
また、本発明の実施形態に係る道路線形情報生成方法によれば、前述の道路測量方法により測量されたカーブ区間1aの三次元位置の座標データに基づいて道路線形情報が生成されるため、道路線形情報を正確に生成することができる。
【0032】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものでないと考えられるべきである。本発明の範囲は、上記した意味ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味、及び範囲内でのすべての変更が含まれることが意図される。
【0033】
例えば、参照テーブル9の各上限値Puは、離反距離dの最大値を100mmに設定して算出されているが、当該最大値を他の任意の値に設定して算出されるものであってもよい。また、参照テーブル9の各下限値Pdは、曲率半径Rが一回り小さい場合の上限値Puと同一の値となるように、離反距離dの最小値を設定して算出されているが、前記上限値Puと異なる値となるように、離反距離dの最小値を設定して算出されるものであってもよい。
【0034】
さらに、本発明の道路測量方法により測量された測量結果に基づいて生成された道路線形情報は、車両6に対してブレーキ介入を実行する支援制御に用いられているが、車両6を運転しているドライバに停止や減速を促す警告を音声によって出力したり、車内に搭載したモニタに表示させる支援制御に用いられてもよい。
【符号の説明】
【0035】
1 道路
1a カーブ区間
8 地図
9 参照テーブル
A 仮想直線群
a1〜a4 被測量点
d 離反距離
P 測量ピッチ
Pd 下限値
Pu 上限値
R 曲率半径
S 仮想円周線
【技術分野】
【0001】
本発明は、車両に提供される道路線形情報を生成するために行われる道路測量方法及び道路線形情報生成方法に関する。
【背景技術】
【0002】
従来、交差点内及びその近傍での車両による交通事故を防ぐために、例えば交差点の上流側に設置された光ビーコンの通信領域から交差点の停止線までの距離情報、及び信号灯色の切替タイミングに関する信号情報を車両に搭載された車載機に提供し、車載機がその情報に基づいて前記交差点の手前で安全に停止できるか否か、前記交差点を安全に通過できるか否かを判断し、運転手に音声などで注意を促したり、その判断に基づいて車両のブレーキ介入を実行したりする安全運転の支援制御を行う装置がある(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−293660号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記支援制御を正確に行うためには、交差点の停止線までの距離情報が正確である必要がある。この場合、停止線までの距離を市販の平面地図データに基づいて算出することもできるが、この平面距離は、道路の高低差H(図2参照)を考慮してないので、車両が交差点の停止線まで実際に走行する道のり距離を正確に反映していない。
【0005】
そこで、測量機器を用いて道路の三次元位置を実際に測量し、この測量データに基づいて光ビーコンの通信領域から停止線までの正確な道のり距離を算出する必要がある。その際、例えば光ビーコンの通信領域から停止線までにカーブ区間が存在する場合、このカーブ区間における測量ピッチを小さくすればするほどカーブ区間の測量を高精度に行うことはできるが、その反面、作業効率が低下するという問題が生じる。
【0006】
本発明は、前記問題点に鑑みてなされたものであり、道路のカーブ区間を測量する際に測量精度を確保しつつカーブ区間を効率良く測量することができる道路測量方法及び道路線形情報生成方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明の道路測量方法は、道路のカーブ区間を測量する道路測量方法であって、前記カーブ区間を測量する測量ピッチの上限値及び下限値が前記カーブ区間の曲率半径に応じて定められた参照テーブルに基づいて、前記測量ピッチを前記上限値と前記下限値との間で選定し、選定した前記測量ピッチにより前記カーブ区間を測量することを特徴とする。
【0008】
本発明の道路測量方法によれば、道路のカーブ区間を測量する際に、カーブ区間の曲率半径に応じて定められた測量ピッチの上限値と下限値との間で適切な測量ピッチを選定することができる。これにより、前記上限値を上回る測量ピッチで測量されるのを抑制することができるため、測量精度が低下するのを抑制することができる。また、前記下限値を下回る測量ピッチで測量されるのを抑制することができるため、被測量点が多くなり過ぎるのを抑制することができる。したがって、道路のカーブ区間を測量する際に測量精度を確保しつつカーブ区間を効率良く測量することができる。
【0009】
(2)また、前記測量ピッチの前記上限値及び前記下限値は、被測量点間を直線で連結した仮想直線群と、前記曲率半径により形成される仮想円周線との離反距離が所定範囲内に収まるように定められることが好ましい。この場合は、実際に測量される被測量点間を直線で連結した仮想直線群と、カーブ区間の曲率半径により形成される仮想円周線との離反距離を所定範囲内に納まるように測量することができるため、カーブ区間の測量精度が低下するのを効果的に抑制することができる。
【0010】
(3)また、前記道路測量方法では、前記曲率半径を、国土地理院で定められた公共測量作業規定に準拠して作成された地図上で計測することが好ましい。この場合は、曲率半径を正確に計測することができるため、この曲率半径に応じた測量ピッチを正確に選定することができる。
【0011】
(4)本発明の道路線形情報生成方法は、前述の測量方法により得られた前記カーブ区間の座標に基づいて道路線形情報を生成することを特徴とする。
本発明によれば、前述した測量方法により測量されたカーブ区間の座標に基づいて道路線形情報を正確に生成することができる。
【発明の効果】
【0012】
本発明によれば、道路のカーブ区間を測量する際に、測量精度が低下するのを抑制することができるとともに、被測量点が多くなり過ぎるのを抑制することができる。したがって、道路のカーブ区間を測量する際に測量精度を確保しつつカーブ区間を効率良く測量することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る道路測量方法により測量が行われる道路の平面図である。
【図2】図1の道路の側断面図である。
【図3】図1の道路のカーブ区間を示す地図である。
【図4】測量ピッチの上限値及び下限値がカーブ区間の曲率半径に応じて定められた参照テーブルを示す図である。
【図5】測量ピッチの上限値及び下限値を定める際に用いられる仮想直線群と仮想円周線を示す図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態を図面に基づいて説明する。
図1は本発明の一実施形態に係る道路測量方法により測量が行われる道路の平面図であり、図2は図1の道路の側断面図である。図1の道路1において、信号機2が設置された交差点3の手前には停止線4が設けられている。交差点3の上流側には、停止線4から所定距離を空けて光ビーコン5が設置されている。停止線4と光ビーコン5との間の道路1には、カーブ区間1aが設けられている。
【0015】
光ビーコン5は、車両6とその直下よりやや上流側の通信領域において、静的情報と動的情報とを含むダウンリンク信号を車両6に搭載された車載機6aへ送信する。ここで、静的情報とは、時間の経過とともに内容が変動しない情報であり、動的情報とは、時間の経過とともに内容が変動する情報である。静的情報としては、例えば道路の形状に関する道路形状情報が挙げられる。道路形状情報とは、例えば、光ビーコン5よりも少し上流側にある光ビーコン5と車載機6aとの路車間通信領域の上流端から停止線4までの道路の車線数、道路の高低差H(図2参照)、道路の道のり距離(前記高低差Hを考慮した距離)La等を含む情報である。この道路線形情報は、例えば各光ビーコン5に記憶されている。動的情報としては、例えば信号情報が挙げられる。信号情報とは、例えば、信号機2の黄信号開始時点、黄信号時間、赤信号時間等の信号灯色の切替タイミングに関する情報を指す。
【0016】
車載機6aは、光ビーコン5から受信した道路線形情報に基づいて、現走行位置から車両進行方向前方の停止線4までの距離Lcを求める。そして、この距離Lcと前記信号情報に基づいて、交差点3を安全に通過若しくは停止できるか否かを車載機6aが判断し、その判断に基づいて車両6に対してブレーキ介入を実行する安全運転の支援制御を行う。例えば、交差点3の手前で安全に停止できると判断した場合には、停止線4までの距離Lcに基づいて、車両6を徐々に減速させ、前記距離Lcを進んだ時点で車両6の速度がゼロとなるように支援制御する。
【0017】
次に、光ビーコン5から道路線形情報として提供される道路1の道のり距離Laを算出するために行われる道路1の測量方法について、図面を参照しながら説明する。本実施形態では、図1に示すように、主にカーブ区間1aの三次元位置を、図示しないトータルステーションを用いて測量する場合について説明する。ここで、トータルステーションとは、光波測角儀(トランシット)と光波測距儀の機能を併せ持つ光波測距測角儀であり、内蔵のコンピュータにより測量データの記録、座標の計算、出力までを自動的に行うものである。なお、本実施形態のトータルステーションは、視準点として反射プリズムの設置を必要としない所謂ノンプリズム方式の測距機能を有するものである。
【0018】
まず、実際に測量する前に、地図上においてカーブ区間1aの曲率半径Rを計測する。図3は、図1の道路1のカーブ区間1aを示す地図8である。この地図8は、精度誤差を事前に把握できるものが推奨され、より望ましくは国土地理院で定められた公共測量作業規定に準拠して作成されたものが推奨される。本実施形態の地図8は、自治体から発行されたものであって、前記公共測量作業規定に準拠して例えば1/2500の縮尺で作成されたものである。この地図8上に記載されているカーブ区間1aにR定規等のテンプレート(図示省略)を置いてカーブ区間1aの曲率半径Rを計測する。
【0019】
次に、図4に示す参照テーブル9に基づいて、計測された曲率半径Rに対応する測量ピッチP(カーブ区間1aにおける被測量点間のピッチ)を選定する。参照テーブル9は、測量ピッチPの上限値Pu及び下限値Pdがカーブ区間1aの曲率半径Rに応じて定められた一覧表である。この上限値Pu及び下限値Pdは、図5に示すように、複数の被測量点a1〜a4間を直線で連結した仮想直線群Aと、曲率半径Rにより形成される仮想円周線Sとの離反距離dが所定範囲内に収まるように定められている。
【0020】
具体的には図5に示すように、曲率半径Rと、仮想直線群Aの線分a1〜a2の測量ピッチPと、測量ピッチPに対する法線であってかつ仮想円周線Sの中心点Oを通過する直線Bとより形成される直角三角形に着目すると、R2=(P/2)2+(R−d)2の関係が成り立つことから、測量ピッチPは曲率半径R及び離反距離dを用いると、下記式(1)により表すことができる。
P=2×SQRT(R2−(R−d)2) ・・・(1)
ここで、SQRTは、かっこ内の数式で求めた値の平方根を計算するための演算子を表す。
【0021】
測量ピッチPの上限値Puは、上記(1)式において離反距離dを前記所定範囲の最大値に設定することにより算出することができる。図4の参照テーブル9では、離反距離dの最大値を100mmに設定して、各曲率半径Rに対応する上限値Puを上記(1)式を用いて算出している。
【0022】
測量ピッチPの下限値Pdは、上記(1)式において離反距離dを前記所定範囲の最小値に設定することにより算出することができる。図4の参照テーブル9では、各曲率半径Rに対応する下限値Pdが一回り小さい曲率半径Rに対応する上限値Puと同一の値となるように、前記最小値が設定されている。例えば、曲率半径Rが150mの下限値Pdは、離反距離dの最小値を66.67mmに設定して、曲率半径Rが一回り小さい100mに対応する上限値Puと同一の値である8.94mに設定されている。
【0023】
以上のように定められた参照テーブル9に基づいて、計測された曲率半径Rに対応する測量ピッチPの上限値Puと下限値Pdとの間で、実際に測量する測量ピッチPを選定する。例えば、曲率半径Rが150mの場合は、参照テーブル9の上限値Puは10.95m、下限値Pdは8.94mとなるため、実際に測量する測量ピッチPを例えば10.00mとして選定する。
【0024】
測量ピッチPを選定した後は、図1に示すように、光ビーコン5よりも少し上流側にある光ビーコン5と車載機6aとの路車間通信領域の上流端から停止線4までの道路1における道路縁の三次元位置をトータルステーションにより測量する。その際、カーブ区間1aの測量は、上記選定した測量ピッチPにより定める各被測量点a1〜a4を前述のノンプリズム方式で測量を行う。
【0025】
具体的には、トータルステーションから各被測量点a1〜a4に向けて赤外レーザ光を出射し、各被測量点a1〜a4において反射した反射光を受光して測距・測角する。測距・測角後は、これによって得られた角度及び距離から各被測量点a1〜a4の三次元位置の座標を計算し、この座標データを測量結果としてトータルステーションに記録する。
【0026】
トータルステーションにより道路1の光ビーコン5よりも少し上流側にある光ビーコン5と車載機6aとの路車間通信領域の上流端から停止線4までの間の測量が完了すると、トータルステーションに記録された座標データに基づいて、道路線形情報を生成する。具体的には、トータルステーションに記憶された各被測量点a1〜a4等の三次元位置に基づいて、コンピュータ上でカーブ区間1aを含む道路1の形状を再現する。そして、光ビーコン5よりも少し上流側にある光ビーコン5と車載機6aとの路車間通信領域の上流端から停止線4までの高低差Hを計算し、この高低差Hに基づいて道のり距離Laを算出する。
【0027】
このような方法により、道路線形情報の作成対象となるカーブ区間1aの路肩部分、各車線を区切る境界線や中央線を順次測量していき、離散的な被測量点の絶対座標に基づいてコンピュータ上に道路形状を再現させる。
そして、再現させた道路形状の各車線の左右両端の位置から車線中央を通る中心線を求め、その中心線上に設けた離散点に関する情報(離散点間の距離等)を道路線形情報に含める。
道路線形情報を受信した車両6の車載機6aは、自己が走行している車線の番号を光ビーコン5との路車間通信によって取得することができるので、受信した道路線形情報のうち、自己が走行している車線番号に対応する道路線形情報を読み出すことが可能である。従って、走行車線に対応する前記中心線上の離散点に関する情報を順番に読み込んで、それらの離散点間の距離を合計することで停止線までの道のりを精度よく把握することが可能になる。
【0028】
以上、本発明の実施形態に係る道路測量方法によれば、道路1のカーブ区間1aを測量する際に、カーブ区間1aの曲率半径Rに応じて定められた測量ピッチPの上限値Puと下限値Pdとの間で適切な測量ピッチPを選定することができる。これにより、上限値Puを上回る測量ピッチで測量されるのを抑制することができるため、測量精度が低下するのを抑制することができる。また、下限値Pdを下回る測量ピッチで測量されるのを抑制することができるため、被測量点が多くなり過ぎるのを抑制することができる。したがって、道路1のカーブ区間1aを測量する際に測量精度を確保しつつカーブ区間1aを効率良く測量することができる。
【0029】
また、実際に測量される各被測量点a1〜a4間を直線で連結した仮想直線群Aと、カーブ区間1aの曲率半径Rにより形成される仮想円周線Sとの離反距離dを所定範囲内に納まるように測量することができるため、カーブ区間1aの測量精度が低下するのを効果的に抑制することができる。
【0030】
また、曲率半径Rを、国土地理院で定められた公共測量作業規定に準拠して作成された地図8上で計測するようにしたので、曲率半径Rを正確に計測することができる。したがって、この曲率半径Rに応じた測量ピッチPを正確に選定することができる。
【0031】
また、本発明の実施形態に係る道路線形情報生成方法によれば、前述の道路測量方法により測量されたカーブ区間1aの三次元位置の座標データに基づいて道路線形情報が生成されるため、道路線形情報を正確に生成することができる。
【0032】
なお、今回開示された実施の形態はすべての点で例示であって制限的なものでないと考えられるべきである。本発明の範囲は、上記した意味ではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味、及び範囲内でのすべての変更が含まれることが意図される。
【0033】
例えば、参照テーブル9の各上限値Puは、離反距離dの最大値を100mmに設定して算出されているが、当該最大値を他の任意の値に設定して算出されるものであってもよい。また、参照テーブル9の各下限値Pdは、曲率半径Rが一回り小さい場合の上限値Puと同一の値となるように、離反距離dの最小値を設定して算出されているが、前記上限値Puと異なる値となるように、離反距離dの最小値を設定して算出されるものであってもよい。
【0034】
さらに、本発明の道路測量方法により測量された測量結果に基づいて生成された道路線形情報は、車両6に対してブレーキ介入を実行する支援制御に用いられているが、車両6を運転しているドライバに停止や減速を促す警告を音声によって出力したり、車内に搭載したモニタに表示させる支援制御に用いられてもよい。
【符号の説明】
【0035】
1 道路
1a カーブ区間
8 地図
9 参照テーブル
A 仮想直線群
a1〜a4 被測量点
d 離反距離
P 測量ピッチ
Pd 下限値
Pu 上限値
R 曲率半径
S 仮想円周線
【特許請求の範囲】
【請求項1】
道路のカーブ区間を測量する道路測量方法であって、
前記カーブ区間を測量する測量ピッチの上限値及び下限値が前記カーブ区間の曲率半径に応じて定められた参照テーブルに基づいて、前記測量ピッチを前記上限値と前記下限値との間で選定し、
選定した前記測量ピッチにより前記カーブ区間を測量することを特徴とする道路測量方法。
【請求項2】
前記測量ピッチの前記上限値及び前記下限値は、被測量点間を直線で連結した仮想直線群と、前記曲率半径により形成される仮想円周線との離反距離が所定範囲内に収まるように定められる請求項1に記載の道路測量方法。
【請求項3】
前記曲率半径を、国土地理院で定められた公共測量作業規定に準拠して作成された地図上で計測する請求項1又は2に記載の道路測量方法。
【請求項4】
請求項1〜3のいずれか一項に記載の測量方法により得られた前記カーブ区間の座標に基づいて道路線形情報を生成することを特徴とする道路線形情報生成方法。
【請求項1】
道路のカーブ区間を測量する道路測量方法であって、
前記カーブ区間を測量する測量ピッチの上限値及び下限値が前記カーブ区間の曲率半径に応じて定められた参照テーブルに基づいて、前記測量ピッチを前記上限値と前記下限値との間で選定し、
選定した前記測量ピッチにより前記カーブ区間を測量することを特徴とする道路測量方法。
【請求項2】
前記測量ピッチの前記上限値及び前記下限値は、被測量点間を直線で連結した仮想直線群と、前記曲率半径により形成される仮想円周線との離反距離が所定範囲内に収まるように定められる請求項1に記載の道路測量方法。
【請求項3】
前記曲率半径を、国土地理院で定められた公共測量作業規定に準拠して作成された地図上で計測する請求項1又は2に記載の道路測量方法。
【請求項4】
請求項1〜3のいずれか一項に記載の測量方法により得られた前記カーブ区間の座標に基づいて道路線形情報を生成することを特徴とする道路線形情報生成方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−242146(P2011−242146A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−111803(P2010−111803)
【出願日】平成22年5月14日(2010.5.14)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月14日(2010.5.14)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]