
電動ブレーキ装置
【課題】 制動力の低下を抑えつつ、モータコイルやモータブラシの過熱を抑制することが可能な電動ブレーキ装置を提供する。
【解決手段】 本発明の電動ブレーキ装置は、電動ブレーキアクチュエータ部が、車輪に生じる実制動力を検出する制動力検出部と、電動モータのモータ温度を検出するモータ温度検出部と、を有し、電気制御部が、ブレーキ操作量に基づいて要求制動力を演算する要求制動力演算部と、要求制動力に実制動力をフィードバックして制御制動力を演算するフィードバック制御演算部と、制御制動力に基づいて電動モータの駆動信号を生成する駆動信号演算部と、モータ温度検出部の検出結果に基づいて電動モータの過熱を抑える過熱保護モードに移行するか否かを判定する過熱保護モード判定部と、過熱保護モード判定部が過熱保護モードと判定したときに電動モータへ供給する電流の電流変動量を抑制する電流変動量抑制補正部と、を有する。
【解決手段】 本発明の電動ブレーキ装置は、電動ブレーキアクチュエータ部が、車輪に生じる実制動力を検出する制動力検出部と、電動モータのモータ温度を検出するモータ温度検出部と、を有し、電気制御部が、ブレーキ操作量に基づいて要求制動力を演算する要求制動力演算部と、要求制動力に実制動力をフィードバックして制御制動力を演算するフィードバック制御演算部と、制御制動力に基づいて電動モータの駆動信号を生成する駆動信号演算部と、モータ温度検出部の検出結果に基づいて電動モータの過熱を抑える過熱保護モードに移行するか否かを判定する過熱保護モード判定部と、過熱保護モード判定部が過熱保護モードと判定したときに電動モータへ供給する電流の電流変動量を抑制する電流変動量抑制補正部と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動モータにより制動トルクを制御する電動ブレーキ装置に関する。
【背景技術】
【0002】
電動モータにより制動トルクを制御する制御装置の一例として、例えば、特許文献1及び2に挙げられる発明が知られている。特許文献1に記載の発明は、操作者のブレーキ操作量に基づいた目標加圧力と実際の加圧力とから必要な制動トルクを判定し、判定値に応じた電流を電動モータに供給する車両用ブレーキの制御装置である。特許文献1に記載の発明は、制動トルクを減少すべきと判定した際にモータへの供給電流を遮断すると共に、スリップ率に基づいて制動トルクを減少すべきと判定したときには、モータ逆回転方向の電流を供給することで、モータ作動頻度を低減し、モータのブラシ寿命を延ばすことを図っている。
【0003】
特許文献2に記載の発明は、電動パワーステアリング装置において、モータの温度推定を行い、その推定値が上限温度を超えないように、モータへの通電に制限を設けて、モータの過熱を防止している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3740007号公報
【特許文献2】特許第3715136号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明では、モータの発熱に関して考慮されておらず、ABS(アンチロック・ブレーキ・システム)、ESC(横滑り防止機構)又はTRC(トラクション・コントロール・システム)のように急減圧が必要となる場合や、急制動及び急減圧を繰り返した場合にモータコイルが過熱するおそれがある。特許文献1に記載の発明において、モータコイルの過熱を防止しようとすると、熱容量が大きな体格が大きいモータが必要となる。
【0006】
また、特許文献2に記載の発明では、モータの過熱を防止するために、モータへの通電に制限を設けており、実際の制動力が要求制動力に到達しない可能性がある。
【0007】
本発明は、上記実情に鑑みてなされたものであり、制動力の低下を抑えつつ、モータコイルやモータブラシの過熱を抑制することが可能な電動ブレーキ装置を提供することを課題とする。
【課題を解決するための手段】
【0008】
請求項1に係る電動ブレーキ装置は、車輪と一体に回転する被制動部材に摩擦材を電動モータにより押圧して制動力を発生させる電動ブレーキアクチュエータ部と、運転者によるブレーキ操作を検出するペダル操作部と、前記ペダル操作部により検出されたブレーキ操作量から要求制動力を演算して前記電動モータの駆動信号を生成する電気制御部と、前記駆動信号に基づいて前記電動ブレーキアクチュエータ部を駆動させる駆動回路部と、を備える電動ブレーキ装置において、前記電動ブレーキアクチュエータ部は、前記車輪に生じる実制動力を検出する制動力検出部と、前記電動モータのモータ温度を検出するモータ温度検出部と、を有し、前記電気制御部は、前記ブレーキ操作量に基づいて前記要求制動力を演算する要求制動力演算部と、前記要求制動力に前記実制動力をフィードバックして制御制動力を演算するフィードバック制御演算部と、前記制御制動力に基づいて前記電動モータの駆動信号を生成する駆動信号演算部と、前記モータ温度検出部の検出結果に基づいて前記電動モータの過熱を抑える過熱保護モードに移行するか否かを判定する過熱保護モード判定部と、前記過熱保護モード判定部が前記過熱保護モードと判定したときに前記電動モータへ供給する電流の電流変動量を抑制する電流変動量抑制補正部と、を有することを特徴とする。
【0009】
請求項2に係る電動ブレーキ装置は、請求項1において、前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、フィードバック制御ゲインを低下させる。
【0010】
請求項3に係る電動ブレーキ装置は、請求項1又は2において、アンチロック制御中に前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、前記電動ブレーキアクチュエータ部が加圧中はフィードバック制御ゲインを低下させ、前記電動ブレーキアクチュエータ部が減圧中は前記フィードバック制御ゲインを通常制御ゲインにする。
【0011】
請求項4に係る電動ブレーキ装置は、請求項3において、前記駆動信号演算部は、前記減圧中に前記電動モータの電流を遮断する駆動信号を生成する。
【0012】
請求項5に係る電動ブレーキ装置は、請求項1又は2において、アンチロック制御は、前記要求制動力が急激に増加する急増モードと、前記急増モードと比較して前記要求制動力が緩やかに増加する緩増モードと、を有し、前記アンチロック制御中に前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、前記電動ブレーキアクチュエータ部が前記緩増モードで加圧中はフィードバック制御ゲインを低下させ、前記電動ブレーキアクチュエータ部が減圧中又は前記急増モードで加圧中は前記フィードバック制御ゲインを通常制御ゲインにする。
【0013】
請求項6に係る電動ブレーキ装置は、請求項1〜5において、トラクション制御中に前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、前記電動ブレーキアクチュエータ部が減圧中はフィードバック制御ゲインを低下させ、前記電動ブレーキアクチュエータ部が加圧中は前記フィードバック制御ゲインを通常制御ゲインにする。
【0014】
請求項7に係る電動ブレーキ装置は、請求項1〜6において、前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記要求制動力演算部は、前記要求制動力に勾配制限を設ける。
【0015】
請求項8に係る電動ブレーキ装置は、請求項1〜7において、前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記要求制動力演算部は、前記要求制動力にフィルタを掛ける。
【発明の効果】
【0016】
請求項1に係る電動ブレーキ装置によれば、電動モータの過熱保護が必要となったときに、電流変動量抑制補正部が電動モータへ供給する電流の電流変動量を抑制するので、制動力の低下を抑えつつ、モータコイルやモータブラシの過熱を抑制することができる。
【0017】
請求項2に係る電動ブレーキ装置によれば、電動モータの過熱保護が必要となったときに、電流変動量抑制補正部がフィードバック制御ゲインを低下させるので、過熱保護モード時にフィードバック制御の応答が緩やかになり、電動モータへ供給する電流の電流変動量を抑制することができる。
【0018】
請求項3に係る電動ブレーキ装置によれば、アンチロック制御中に電動モータの過熱保護が必要となったときに、電動ブレーキアクチュエータ部の加圧中にフィードバック制御ゲインを低下させるので、減圧中はフィードバック制御の応答性を確保して、加圧中はフィードバック制御の応答を緩やかにすることができる。そのため、電動ブレーキアクチュエータ部の加圧中において、電動モータへ供給する電流の電流変動量を抑制することができる。
【0019】
請求項4に係る電動ブレーキ装置によれば、請求項3において、電動ブレーキアクチュエータ部の減圧中に、電動モータに電流が供給されないので、電動モータの過熱を抑えることができる。
【0020】
請求項5に係る電動ブレーキ装置によれば、アンチロック制御中に電動モータの過熱保護が必要となったときに、電動ブレーキアクチュエータ部が緩増モードで加圧中はフィードバック制御ゲインを低下させ、電動ブレーキアクチュエータ部が減圧中又は急増モードで加圧中はフィードバック制御ゲインを通常制御ゲインにするので、アンチロック制御の性能低下を極力抑えつつ、電動モータの過熱を抑制することができる。
【0021】
請求項6に係る電動ブレーキ装置によれば、トラクション制御中に電動モータの過熱保護が必要となったときに、電動ブレーキアクチュエータ部の減圧中にフィードバック制御ゲインを低下させるので、加圧中はフィードバック制御の応答性を確保して、減圧中はフィードバック制御の応答を緩やかにすることができる。そのため、電動ブレーキアクチュエータ部の減圧中において、電動モータへ供給する電流の電流変動量を抑制することができる。
【0022】
請求項7及び8に係る電動ブレーキ装置によれば、過熱保護モード判定部が過熱保護モードと判定したときに、要求制動力演算部が要求制動力の急増又は急減を抑制することができるので、電動モータへ供給する電流の電流変動量を抑制することができる。
【図面の簡単な説明】
【0023】
【図1】第1実施形態に係る電動ブレーキ装置の全体図である。
【図2】図1に示す電動ブレーキアクチュエータ部の断面図である。
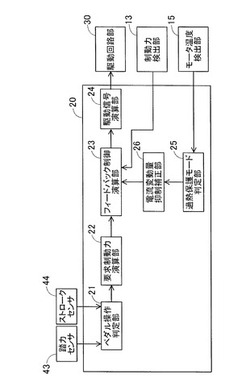
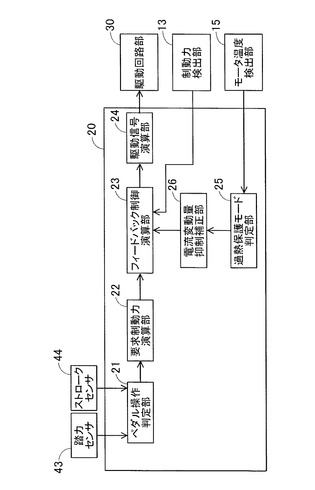
【図3】電気制御部における制御ブロック図である。
【図4】第1実施形態における制御フロー(メインルーチン)を示すフローチャートである。
【図5】踏力と要求制動力(要求加圧力)の関係を示す図である。
【図6】フィードバック制御のブロック線図である。
【図7】制御制動力とモータ電流の関係を示す図である。
【図8】第1実施形態における過熱保護モードへの移行可否を判定するフローチャートである。
【図9】過熱保護モード中の電動ブレーキ装置の実制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は実制動力を(B)はモータ電流を示す。
【図10】第2実施形態における過熱保護モードへの移行可否を判定するフローチャートである。
【図11】第2実施形態に係る電動ブレーキ装置の要求制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は要求制動力を(B)はモータ電流を示す。
【図12】第2実施形態の変形形態2に係る電動ブレーキ装置の要求制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は要求制動力を(B)はモータ電流を示す。
【図13】第3実施形態における過熱保護モードへの移行可否を判定するフローチャートを示している。
【図14】第3実施形態に係る電動ブレーキ装置の要求制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は要求制動力を(B)はモータ電流を示す。
【発明を実施するための形態】
【0024】
以下、本発明の実施形態を図面に基づいて説明する。なお、各実施形態について共通の箇所には共通の符号を付して対応させることにより重複する説明を省略する。なお、各図は概念図であり、細部構造の寸法まで規定するものではない。
【0025】
(1)第1実施形態
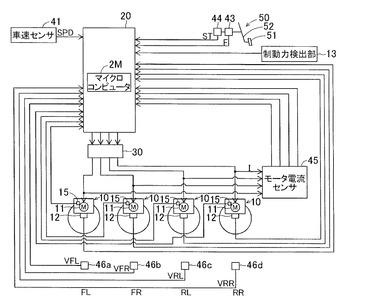
図1は、本実施形態に係る電動ブレーキ装置の全体図を示している。本実施形態の電動ブレーキ装置は、左右前輪FL、FR及び左右後輪RL、RRに設けられ電動モータ11により制動力を発生させる電動ブレーキアクチュエータ部10と、運転者によるブレーキ操作を検出するペダル操作部50と、ペダル操作部50により検出されたブレーキ操作量から要求制動力を演算して電動モータ11の駆動信号を生成する電気制御部20と、駆動信号に基づいて電動ブレーキアクチュエータ部10を駆動させる駆動回路部30と、を具備している。
【0026】
本実施形態では、ペダル操作部50のブレーキペダル51が運転者によって踏み込まれ、ペダルアーム52がそれに伴って揺動すると、その操作量が踏力センサ43やストロークセンサ44で検出される。そして、その検出信号が電気制御部20に入力されることでブレーキペダル51の操作量が検出され、電気制御部20が駆動回路部30を介して、電動モータ11を駆動することにより、電動ブレーキアクチュエータ部10が各車輪FL〜RRに対して制動力を発生させる。以下、詳細に説明する。
【0027】
(1−1)電動ブレーキアクチュエータ部10
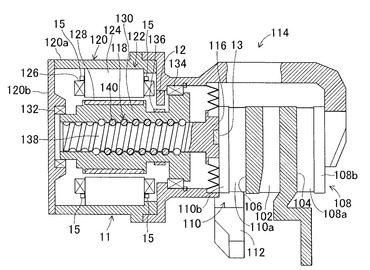
図2は、図1に示す電動ブレーキアクチュエータ部の断面図を示している。図2は、電動ブレーキの一例を示したものであり、電動ブレーキアクチュエータ部10は、ディスクブレーキに限定されるものではない。例えば、ドラムブレーキなど種々の電動ブレーキに使用することができ、要旨を逸脱しない範囲内で適宜変更して実施することができる。
【0028】
電動ブレーキアクチュエータ部10は、車輪と一体に回転する被制動部材であるディスクロータ102を備えている。ディスクロータ102の両面はそれぞれ摩擦面104、106とされ、摩擦面104、106に対向して一対のブレーキパッド108、110が配設されている。各ブレーキパッド108、110は、前面において各摩擦面104、106と接触する摩擦材108a、110aをそれぞれ備えるとともに、同摩擦材108a、110aの背面に鋼製の裏板108b、110bが固着された構造を有している。
【0029】
また、電動ブレーキアクチュエータ部10は、マウンティングブラケット112を備えている。マウンティングブラケット112は、一対のブレーキパッド108、110を跨ぐ状態で車体側部材に回転不能に取付けられ、同一対のブレーキパッド108、110を同ディスクロータ102の回転軸線に平行な方向に移動可能となるように保持している。
【0030】
さらに、電動ブレーキアクチュエータ部10は、キャリパ114を有している。キャリパ114は、図示しないアームを一体に備えていて、このアームからパッド移動方向に平行に伸びる一対の図示しないピンがマウンティングブラケット112のピン孔に摺動可能に嵌合されることにより、ディスクロータ102の回転軸線に平行な方向に移動可能に保持されている。
【0031】
一対のブレーキパッド108、110のうちの内側のインナパッド110の背後には、加圧部材116が軸方向に移動可能に配設されている。加圧部材116は、所定量だけインナパッド110方向に移動したとき、その前面において同インナパッド110の背面に当接させられるようになっている。また、加圧部材116の背後には電動モータ11が配置されている。加圧部材116と電動モータ11は、パッド移動方向に平行に互いに同軸に配置されるとともに、運動変換機構としてのボールねじ118により互いに連結されている。
【0032】
電動モータ11のハウジング120は、円筒状をなす本体部120aと、同本体部120aの一方の開口を閉塞する閉塞部120bとが図示しないボルトにより一体的に結合されることにより構成され、他方の開口の端部においてキャリパ114に対して図示しないボルトにより固定されている。電動モータ11のステータ122は、ハウジング120の内側に固定されていて、金属製のコア124と、コア124に巻回されたコイル126とを備えている。また、ステータ122に僅かな距離を隔てて対向する状態で、永久磁石128が設けられている。永久磁石128は、ボールねじ118のナット130に固定され、同ナット130とともに電動モータ11のロータを構成している。
【0033】
ナット130は、貫通孔を有する円筒形状をなし、ラジアル軸受け132を介してモータハウジング120の閉塞部120bに回転可能に支持される小径部と、ラジアルスラスト軸受け134を介してキャリパ114に回転可能、且つ軸方向に移動不能に支持される大径部とを有している。ナット130の大径部と小径部との間の外周部には永久磁石128が固定されている。ナット130の内周面には、ボールねじ118のボールを保持するためのボール溝が等間隔にて形成されている。また、ナット130はボール溝の適宜個所から同ボール溝の他の個所に至るボール経路を構成する図示しないチューブを有している。
【0034】
ナット130の外周部にはN極及びS極が等間隔で交互に配置された永久磁石136が固定されている。この永久磁石136に対向するようにホール素子からなる位置センサ12がキャリパ114に固定されている。位置センサ12は、ナット130の回転を永久磁石136の回転に伴う磁界の変化に基づいて検出することで制動部材であるインナパッド110のモータ11に対する相対位置Xを検出するようになっている。
【0035】
加圧部材116には、ナット130の内部を挿通するネジ軸138が一体に形成されていて、同ネジ軸138の外周には、ボールねじ118のボール溝が所定のリード角を有するように形成されている。このネジ軸138のボール溝及びナット130の内周に形成されたボール溝と、チューブとによってボールねじのボールの循環経路が形成される。ボールねじ118は、この循環経路内に複数のボール140が一列に連続して収容されることにより構成される周知の形式のものである。なお、本例においては、ボールねじ118の循環経路をチューブ式としたが、所謂コマ式であってもよい。
【0036】
このような構成により、ナット130が電動モータ11により正転(所定の方向に回転)されるとボールねじ118の作用によりネジ軸138が図2において右方向に移動し、加圧部材116が制動部材であるインナパッド110を被制動部材であるディスクロータ102に向けて押動するとともに、同ディスクロータ102に押圧する。
【0037】
加圧部材116のインナパッド110に当接する面には、車輪に生じる実制動力を検出する制動力検出部13が埋設されている。制動力検出部13は、例えば、歪センサである加圧力センサを用いることができる。加圧力センサ13は、加圧部材116がインナパッド110を押圧する実際の加圧力(実加圧力P)を加圧部材116に生じる歪み量から検出することができる。本明細書では、この加圧力(実加圧力P)を「実制動力」という。
【0038】
また、本明細書では、ナット130が正転する方向に電動モータ11が回転するとき、電動モータ11は「正転」しており、電動ブレーキアクチュエータ部10は、「加圧」しているものとする。このときに電動モータ11に流れるモータ電流Iは、説明の便宜上、「正の方向」に流れているものとする。逆に、ナット130が逆転する方向に電動モータ11が回転するとき、電動モータ11は「逆転」しており、電動ブレーキアクチュエータ部10は、「減圧」しているものとする。このときに電動モータ11に流れるモータ電流Iは、説明の便宜上、「負の方向」に流れているものとする。このように、電動モータ11の回転方向を変えることにより、制動力を増減させることができる。
【0039】
さらに、電動モータ11のコイル126付近には、コイル126に近接してモータ温度検出部15が備えられている。モータ温度検出部15は、コイル126及びコア124と絶縁されてコア124に支持されている。モータ温度検出部15は、例えば、サーミスタ、熱電対などの市販の温度センサを用いることができる。モータ駆動時は、コイル126が高温となるため、コイル126に近接してモータ温度検出部15を配置することにより、電動モータ11の過熱状態を的確に把握することができる。なお、ブラシ付きの電動モータの場合、モータ温度検出部15は、コイルだけでなく、ブラシに近接して配置することができる。モータ駆動時は、モータコイルやブラシが高温となるため、両者に近接してモータ温度検出部15を配置することにより、電動モータの過熱状態を的確に把握することができる。
【0040】
(1−2)電気制御部20
図1に示すように、電気制御部20は、図示しないメモリ及びCPUを備えるマイクロコンピュータ2Mを有しており、メモリ内に格納されたプログラムを実行することによって、電動ブレーキアクチュエータ部10を制御することができる。制御の詳細は後述する。
【0041】
また、電気制御部20は、位置センサ12と、制動力検出部(加圧力センサ)13と、図示しない変速機の出力軸の回転を検出することにより車両の速度(以下、「車速」という。)SPDを検出する車速センサ41と、運転者によるブレーキペダル51のペダル踏力Fを検出する踏力センサ43と、ブレーキペダル51の操作ストロークSTを検出するストロークセンサ44と、電動モータ11のモータ電流Iを検出するモータ電流センサ45と、4輪FL、FR、RL、RRにそれぞれ設けられ各輪の車輪速度VFL、VFR、VRL、VRRを検出する車輪速センサ46a〜46dと、コイル126のモータ温度Tを検出するモータ温度検出部15と、が接続されていて、これらの検出信号を入力することができる。電気制御部20は、駆動回路部30に接続されており、駆動回路部30に電動モータ11の駆動信号を出力する。
【0042】
(1−3)駆動回路部30
駆動回路部30は、入力側が電気制御部20に、出力側が電動モータ11に接続されるとともに電源としての図示しない車両バッテリと接続されたスイッチング回路である。駆動回路部30は、電気制御部20からの駆動信号(駆動信号には電流の向きも含まれる。)に応じた電流を各々の電動モータ11に供給することができ、例えば、インバータにより構成することができる。駆動回路部30は、電動モータ11を回転させることにより、電動ブレーキアクチュエータ部10を駆動させることができる。駆動回路部30と各電動モータ11の電流供給ラインにはモータ電流センサ45が接続されている。モータ電流センサ45は、電動モータ11に実際に供給される実供給電流Iを検出することができる。モータ電流センサ45は、例えば、ホール素子を使用した電流センサを用いることができる。
【0043】
(1−4)ペダル操作部50
ペダル操作部50は、運転者によるブレーキペダル51のペダル踏力Fを検出する踏力センサ43と、ブレーキペダル51の操作ストロークSTを検出するストロークセンサ44と、を有している。踏力センサ43及びストロークセンサ44は、特に限定されず、市販の踏力センサ及びストロークセンサを用いることができる。例えば、コイルばねの弾性復元力を用いたセンサが挙げられる。
【0044】
(1−5)電動ブレーキ装置の制御
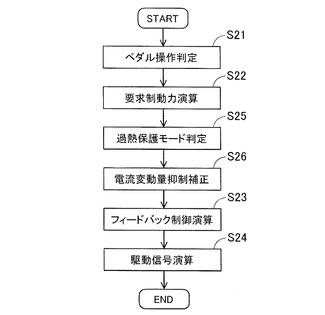
図3は、電気制御部における制御ブロック図を示している。図4は、本実施形態における制御フロー(メインルーチン)を示すフローチャートである。電気制御部20は、メモリ内に格納されたプログラムを実行することによって、本電動ブレーキ装置の制御を行うことができる。プログラムは、図4に示すフローに従って所定時間の経過毎(以下、制御周期という。)に繰り返し実行される。つまり、ステップS21においてペダル操作判定を行い、以下順に、ステップS22で要求制動力演算を、ステップS25で過熱保護モード判定を、ステップS26で電流変動量抑制補正を、ステップS23でフィードバック制御演算を、ステップS24で駆動信号演算を行う。
【0045】
ペダル操作判定はペダル操作判定部21が行い、要求制動力演算は要求制動力演算部22が行う。フィードバック制御演算はフィードバック制御演算部23が行い、駆動信号演算は駆動信号演算部24が行う。過熱保護モード判定は過熱保護モード判定部25が行い、電流変動量抑制補正は電流変動量抑制補正部26が行う。以下、詳細に説明する。
【0046】
(1−5−1)ペダル操作判定部21
ペダル操作判定部21では、踏力センサ43及び/又はストロークセンサ44のいずれの検出値を用いて、要求制動力Prefを演算するかを判定する。要求制動力Prefは、いずれか一方の検出値から演算することができる。両方の検出値を用いれば、検出精度を上げることができる。また、制動力の大きさによって使用する検出値を使い分けることもできる。
【0047】
(1−5−2)要求制動力演算部22
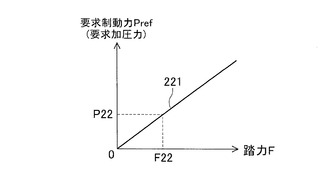
図5は、踏力と要求制動力(要求加圧力)の関係を示している。要求制動力演算部22では、ペダル操作判定部21で選択された踏力センサ43及び/又はストロークセンサ44の検出値(踏力F及び/又は操作ストロークST)から要求制動力Prefを演算する。
【0048】
踏力F及び/又は操作ストロークSTと要求制動力Prefの関係は、予めマイクロコンピュータ2Mが参照するメモリ内にマップとして格納されている。図5に示すように、例えば、踏力FがF22のとき、要求制動力PrefはP22であるので、F22とP22の組み合わせをマップとして格納しておく。そして、踏力センサ43による踏力の検出値がF22のとき、P22をマップから読み出して要求制動力Prefを求めることができる。また、踏力Fと要求制動力Prefの関係を示す近似線221から予め近似式を求めておいて、踏力Fを近似式に代入することによって要求制動力Prefを求めることもできる。以上のことは、操作ストロークSTについても同様である。なお、両方のセンサからの検出値を用いる場合は、前節で説明した方法の他に、例えば、踏力センサ43から得られる要求制動力Prefと、ストロークセンサ44から得られる要求制動力Prefと、の平均値を求めて、その平均値を要求制動力Prefとすることもできる。
【0049】
(1−5−3)フィードバック制御演算部23
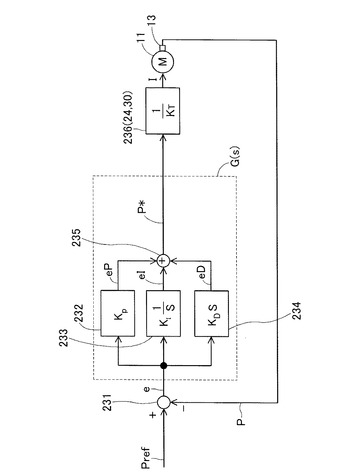
図6は、フィードバック制御のブロック線図を示している。フィードバック制御演算部23は、要求制動力Prefに実制動力Pをフィードバックして制御制動力P*を演算する。フィードバック制御演算部23は、例えば、既知の比例制御(P制御)、積分制御(I制御)及び微分制御(D制御)のうち、少なくとも1つの制御を行うことによって、制御制動力P*を演算することができる。図6は、比例制御(P制御)、積分制御(I制御)及び微分制御(D制御)をすべて行うPID制御のブロック線図の一例を示したものであり、このブロック線図に限定されるものではない。例えば、実制動力PにフィードバックゲインKfを乗じて、それをフィードバックさせても良く、要旨を逸脱しない範囲内で適宜変更して実施することができる。以下、フィードバック制御について説明する。
【0050】
要求制動力演算部22の出力である要求制動力Prefと、制動力検出部13による検出値である実制動力Pと、が減算器231によって減算され、偏差e(=Pref−P)が得られる。偏差eは、乗算器232によって乗算されて演算結果ePが得られる。偏差eは、積分器233によって積分されて演算結果eIが得られる。また、偏差eは、微分器234によって微分されて演算結果eDが得られる。そして、演算結果eP、eI及びeDが加算器235で加算されて、制御制動力P*が得られる。図中、KPは比例ゲインを、KIは積分ゲインを、KDは微分ゲインを、それぞれ示しており、「s」は、ラプラス変換における複素数を示している。この場合の伝達関数G(s)は、下記数1で表すことができる。
(数1)
G(s)=KP+KI×1/s+KD×s
【0051】
比例ゲインKP、積分ゲインKI及び微分ゲインKDの初期値は、電気制御部20のメモリ内に格納されたプログラムに記憶されており、電気制御部20の起動時(プログラムが図4に示すフローに従って初めて実行されるとき。以下同じ。)にメモリから読み込まれる。比例ゲインKP、積分ゲインKI及び微分ゲインKDは、後述する過熱保護モード中に制御ゲインを低下させる場合を除いて一定値であり、電動モータ11のモータ特性(巻線抵抗、リアクタンス、誘起電圧など)及び制御仕様から決定される。比例ゲインKPを大きくすると、偏差eのオフセット(定常偏差)を短時間に小さくすることができる。積分ゲインKIを大きくすると、偏差eのオフセットを短時間にゼロにすることができる。また、微分ゲインKDを大きくすると、偏差eの振動を短時間に小さくすることができ、外乱に対して強くなる。PID制御及びパラメータ同定については、制御工学において周知であるので、これ以上の説明は省略する。
【0052】
なお、図6において、制御制動力P*は、除算器236によってトルク定数KTで除算されてモータ電流Iが得られ、モータ電流Iが電動モータ11に供給される。本実施形態では、除算器236は、駆動信号演算部24、駆動回路部30に相当する。
【0053】
(1−5−4)駆動信号演算部24
駆動信号演算部24は、フィードバック制御演算部23の演算結果である制御制動力P*に基づいて電動モータ11の駆動信号を生成する。電動モータ11の駆動信号は、例えば、PWM制御におけるパルスのON幅とOFF幅との比であるデューティ比を用いることができる。PWM制御においては、スイッチング素子がONのときに、対応する相に電流Iが流れ、スイッチング素子がONしている時間(ON幅)に応じてモータ電流Iは変化する。つまり、スイッチング素子がONしている時間(ON幅)が長くなると、モータ電流Iは大きくなり、ON幅が短くなると、モータ電流Iは小さくなる。
【0054】
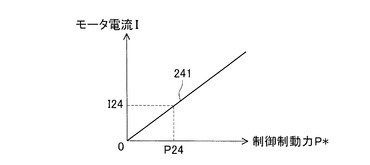
図7は、制御制動力とモータ電流の関係を示している。直流モータでは、モータトルクはモータ電流に比例するので、制御制動力P*は、モータ電流Iに比例する。制御制動力P*は、既述のトルク定数KTを用いて、下記数2で表すことができる。
(数2)
P*=KT×I
【0055】
制御制動力P*を上式に代入することによってモータ電流Iを求めることができる。また、制御制動力P*とモータ電流Iの関係を示す近似線241から予め近似式を求めておいて、制御制動力P*を近似式に代入することによってモータ電流Iを求めることもできる。さらに、制御制動力P*とモータ電流Iとの関係は、予めマイクロコンピュータ2Mが参照するメモリ内にマップとして格納しておくこともできる。図7に示すように、例えば、制御制動力P*がP24のとき、モータ電流IはI24であるので、P24とI24の組み合わせをマップとして格納しておく。そして、制御制動力P*がP24のとき、I24をマップから読み出してモータ電流Iを求めることができる。
【0056】
(1−5−5)過熱保護モード判定部25
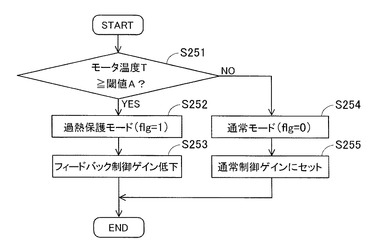
過熱保護モード判定部25は、モータ温度検出部15の検出結果に基づいて電動モータ11の過熱を抑える過熱保護モードに移行するか否かを判定する。図8は、本実施形態における過熱保護モードへの移行可否を判定するフローチャートを示している。図8は、図4に示すステップS25及びステップS26の具体的な処理を示すものである。以下、図8に基づいて説明する。
【0057】
マイクロコンピュータ2Mは、ステップS251において、モータ温度検出部15の検出結果であるモータ温度Tが閾値Aより大きいか否かを判定する。閾値Aは、電気制御部20のメモリ内に格納されたプログラムに記憶されており、電気制御部20の起動時にメモリから読み込まれる。閾値Aは、モータコイル及びモータブラシの耐熱許容温度に所定割合(安全率)を乗じた値にすることができる。例えば、耐熱クラスがE種のモータコイルを用いる場合は、耐熱許容温度は75℃であるので、安全率を90%と仮定すると、閾値Aは67.5℃とすることができる。
【0058】
モータ温度検出部15は、既述の温度センサの検出値を用いることができる。また、モータ温度検出部15は、既述のモータ電流センサ45の検出値からモータ温度Tを推定することもできる。電動モータ11のコイル抵抗をR、モータ電流をIとすると、モータコイルではRI2の電力が消費されてモータコイルが発熱する。モータ電流Iとモータ温度Tの関係を予め求めておくと、高価な温度センサ等を用いなくてもモータ温度Tを推定することができる。なお、温度センサとモータ電流センサ45とを併用して、両者の検出結果を補完(例えば、両者の平均値にするなど)して、モータ温度Tの検出精度を上げることもできる。
【0059】
図8において、モータ温度Tが閾値A以上の場合は、マイクロコンピュータ2Mは、ステップS251において、「YES」と判定して、ステップS252に進み、過熱保護モードに移行したことを示す過熱保護モードフラグflgを「1」にセットする。次に、ステップS253に進み、フィードバック制御ゲインを低下させて、一旦本ルーチンを終了する。
【0060】
モータ温度Tが閾値Aより小さい場合は、マイクロコンピュータ2Mは、ステップS251において、「No」と判定して、ステップS254に進み、過熱保護モードフラグflgを「0」にセットする。次に、ステップS255に進み、フィードバック制御ゲインを通常制御ゲインにセットして、一旦本ルーチンを終了する。
【0061】
本明細書では、過熱保護モードフラグflgが「0」の状態を「通常モード」と呼称し、過熱保護モードフラグflgが「1」の状態を「過熱保護モード」と呼称する。なお、電気制御部20の起動時は、過熱保護モードフラグflgは「0」にセットされている。また、「通常制御ゲイン」とは、電気制御部20の起動時にメモリから読み込まれる比例ゲインKP、積分ゲインKI及び微分ゲインKDの初期値のことをいう。通常制御ゲインは、一定値であれば良く、電気制御部20の起動後に変更することもできる。
【0062】
(1−5−6)電流変動量抑制補正部26
電流変動量抑制補正部26は、過熱保護モード判定部25が過熱保護モードと判定したときに、電動モータ11へ供給する電流の電流変動量を抑制する。例えば、過熱保護モード判定部25が過熱保護モードと判定したときに、電流変動量抑制補正部26がフィードバック制御ゲインを低下させることにより、電動モータ11へ供給する電流の電流変動量を抑制することができる。以下、具体的に説明する。
【0063】
図6において、要求制動力Prefが短時間に大きくなると、要求制動力Prefと実制動力Pとの偏差eも短時間に大きくなる。比例ゲインKPが通常制御ゲインのままのときは、過大した偏差eに比例ゲインKPが乗算されるので、演算結果ePは大きくなる。また、偏差eが短時間に大きくなると、偏差eの微分値は極めて大きくなるので、微分ゲインKDが通常制御ゲインのままのときは、演算結果eDも極めて大きくなる。よって、これらを加算して得られる制御制動力P*も極めて大きくなる。すると、制御制動力P*に比例するモータ電流Iも大きくなり、既述のとおりモータ電流Iの2乗に比例してモータ温度Tが上昇する。
【0064】
過熱保護モード判定部25が過熱保護モードと判定したときは、モータ温度Tは高温になっており、モータ温度Tのさらなる上昇を抑制する必要がある。そこで、本実施形態では、電流変動量抑制補正部26がフィードバック制御ゲインを低下させる。例えば、比例ゲインKPや微分ゲインKDを通常制御ゲインより小さくすると、偏差eが短時間に大きくなっても演算結果eP、eDの増加を抑えることができるので、制御制動力P*が短時間に大きくなることを抑制することができる。
【0065】
また、積分ゲインKIを小さくすると、積分ゲインKIが通常制御ゲインのままのときと比べて、偏差eのオフセットをゼロにするまでに時間を要する。そのため、積分ゲインKIを通常制御ゲインより小さくすると、制御制動力P*と要求制動力Prefのオフセットをゼロにするまでに時間がかかり、制御制動力P*が短時間に要求制動力Prefに一致することを抑制することができる。
【0066】
既述のとおり、過熱保護モード判定部25が過熱保護モードと判定すると、過熱保護モードフラグflgが「1」にセットされる。すると、マイクロコンピュータ2Mは、図8のステップS253で、フィードバック制御ゲインを低下させる。フィードバック制御ゲインは、比例ゲインKP、積分ゲインKI及び微分ゲインKDのうち、少なくともひとつの制御ゲインを低下させることができる。複数のフィードバック制御ゲインを低下させる場合は、通常制御ゲインに対して同じ割合で制御ゲインを減少させても良いし、それぞれ異なる割合で制御ゲインを減少させても良い。フィードバック制御ゲインを減少させる方法は、特に限定されないが、例えば、マイクロコンピュータ2Mが図8に示すルーチンを実行する毎に、制御ゲインから所定量を減算することによって、フィードバック制御ゲインを減少させることができる。フィードバック制御の安定性を確保するためには、各制御ゲインの下限値を設けておくのが良い。これらの具体的なパラメータ値は、実験的に求めても良いし、例えば、既知の計算機シミュレーションによって求めることもできる。シミュレーションモデルは図6に示すブロック線図から容易に作成することができる。
【0067】
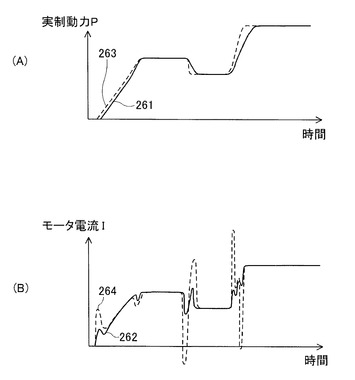
図9は、過熱保護モード中の電動ブレーキ装置の実制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は実制動力を(B)はモータ電流を示している。過熱保護モード中に、フィードバック制御ゲインを低下させた場合の実制動力Pを実線261で示し、モータ電流Iを実線262で示す。なお、フィードバック制御ゲインは、すべてのフィードバック制御ゲインを通常制御ゲインに対してそれぞれ同じ割合で低下させている。また、比較例として、フィードバック制御ゲインを通常制御ゲインのままにした場合の実制動力Pを破線263で示し、モータ電流Iを破線264で示す。
【0068】
図9に示すように、過熱保護モード中に、フィードバック制御ゲインを低下させた場合でも実制動力Pは、目標制動力に到達している。また、モータ電流Iは、モータ慣性による遅れを補償するため、同図(B)に示すような電流波形になるが、過熱保護モード中に、フィードバック制御ゲインを低下させた場合、モータ電流Iの変動幅は、フィードバック制御ゲインを通常制御ゲインのままにした場合のモータ電流Iの変動幅と比べて小さくなっている。つまり、過熱保護モード中に、フィードバック制御ゲインを低下させることにより、フィードバック制御の応答が緩やかになり、モータ電流Iの電流変動量を抑制することができる。また、ノイズ等による電流変動も低減することができる。その結果、モータ電流Iの2乗に比例する発熱を低減することができる。
【0069】
(2)第2実施形態
第2実施形態の電動ブレーキ装置は、第1実施形態の電動ブレーキ装置と基本的には同様の構成、作用効果を有する。共通する部位には共通の符号を付し、異なる部分を中心に説明する。本実施形態では、アンチロック制御中に電動モータ11の過熱保護が必要となったときに、電動ブレーキアクチュエータ部10が加圧中は、電流変動量抑制補正部26がフィードバック制御ゲインを低下させ、電動ブレーキアクチュエータ部10が減圧中は、電流変動量抑制補正部26がフィードバック制御ゲインを通常制御ゲインにすることに特徴がある。本実施形態は、第1実施形態と比べて、過熱保護モード判定部25及び電流変動量抑制補正部26の制御フローが異なる。
【0070】
路面が濡れている場合にはタイヤと路面との間の摩擦係数が小さくなり、ブレーキによる制動トルクが必要以上に大きくなる。その結果、タイヤがロックされて車両は路面上をスリップする。これを防止する方法として、アンチロック制御(ABS制御)が知られている。アンチロック制御は、車輪が滑りはじめたら制動力を抑えてタイヤのロック状態を解消し、ロック状態が解消されたら制動力を大きくする。これを繰り返すことにより、タイヤがロックされた状態を短くすることができ、車両が路面上をスリップすることを抑えることができる。既述のとおり、図2に示す電動ブレーキアクチュエータ部10の場合、電動モータ11の回転方向を変えることにより、制動力を増減させることができる。アンチロック制御自体は広く知られているので、本明細書ではこれ以上の説明は省略する。以下、アンチロック制御中における過熱保護モードへの移行判定及びフィードバック制御ゲインについて説明する。
【0071】
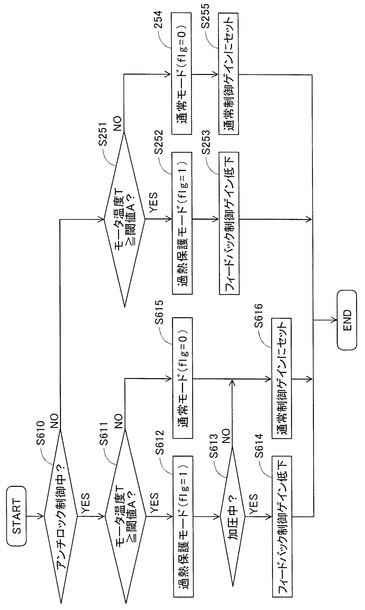
図10は、本実施形態における過熱保護モードへの移行可否を判定するフローチャートであり、図8に示すフローチャートの代わりに実行される。図10は、図4に示すステップS25及びステップS26の具体的な処理を示すものである。なお、図10では、アンチロック制御中でない場合のフローチャートも併せて記載している。以下、説明の便宜上、左後輪RLについてのみ説明するが、マイクロコンピュータ2Mは、右後輪RR並びに左右前輪FL及びFRについても、左後輪RLと同様に、制御周期毎に図10に示すフローチャートを実行する。
【0072】
マイクロコンピュータ2Mは、ステップS610において、電動ブレーキ装置がアンチロック制御中であるか否かを判定する。車輪がロックされているか否かの判断は、既知の方法を用いることができ、特に限定されない。例えば、車速センサ41の検出値SPDと車輪速センサ46cの検出値VRLとからスリップ率Sを求め、スリップ率Sが所定値以上であるとき、車輪RLがロック状態にあると判定することができる。スリップ率Sは、下記数3で表すことができる。
(数3)
S=(SPD−VRL)/SPD
【0073】
電動ブレーキ装置がアンチロック制御中である場合は、ステップS610において、「YES」と判定して、ステップS611に進む。次に、ステップS611において、モータ温度検出部15の検出結果であるモータ温度Tが閾値Aより大きいか否かを判定する。第1実施形態と同様に、モータ温度Tの検出は、既述の温度センサ及び/又はモータ電流センサ45を用いることができる。モータ温度Tが閾値A以上の場合は、マイクロコンピュータ2Mは、ステップS611において、「YES」と判定して、ステップS612に進み、過熱保護モードフラグflgを「1」にセットする。
【0074】
次に、マイクロコンピュータ2Mは、ステップS613に進み、電動ブレーキアクチュエータ部10が加圧中であるか否かを判定する。電動ブレーキアクチュエータ部10が加圧中である場合は、ステップS613において、「YES」と判定して、ステップS614に進む。そして、ステップS614において、フィードバック制御ゲインを低下させて、一旦本ルーチンを終了する。フィードバック制御ゲインを低下させる方法は、第1実施形態と同様である。なお、電動ブレーキアクチュエータ部10が減圧中である場合は、ステップS613において、「No」と判定して、ステップS616に進む。そして、ステップS616において、フィードバック制御ゲインを通常制御ゲインにセットして、一旦本ルーチンを終了する。
【0075】
本実施形態では、電動ブレーキアクチュエータ部10が減圧中はフィードバック制御ゲインを通常制御ゲインにしている。既述のとおり、アンチロック制御では、車輪が滑りはじめたら制動力を抑えてタイヤのロック状態を解消する。そのため、電動ブレーキアクチュエータ部10が減圧中は、制動トルクを急減させる必要がある。本実施形態では、フィードバック制御ゲインを通常制御ゲインにすることにより、フィードバック制御の応答性を確保している。
【0076】
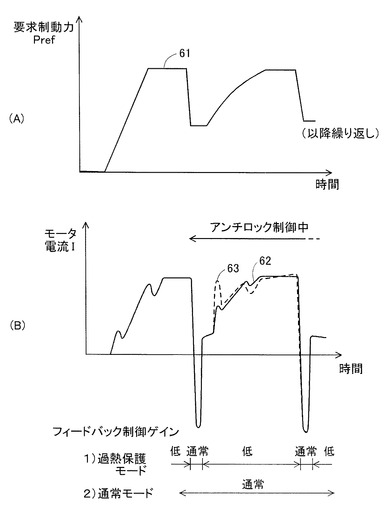
図11は、本実施形態に係る電動ブレーキ装置の要求制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は要求制動力を(B)はモータ電流を示している。
【0077】
図11(A)では、要求制動力Prefを曲線61で示している。同図は、アンチロック制御中において車輪のロック状態を解消するために、要求制動力Prefを増減させていることを示している。同図(B)では、アンチロック制御中において過熱保護モードとなり、電動ブレーキアクチュエータ部10が加圧中(電動モータ11は正転)にフィードバック制御ゲインを低下させた場合のモータ電流Iを実線62で示している。なお、フィードバック制御ゲインは、すべてのフィードバック制御ゲインを通常制御ゲインに対してそれぞれ同じ割合で低下させている。また、比較例として、フィードバック制御ゲインを低下させないで通常制御ゲインのままにした場合(通常モード)のモータ電流Iを破線63で示している。
【0078】
アンチロック制御中において、電動ブレーキアクチュエータ部10が加圧中にフィードバック制御ゲインを低下させた場合は、フィードバック制御ゲインが通常制御ゲインのままの場合と比べて、加圧中はフィードバック制御の応答が緩やかになり、モータ電流Iの電流変動を抑制することができる。
【0079】
次に、アンチロック制御中に電動モータ11の過熱保護が必要でない場合について簡単に説明する。電動ブレーキ装置がアンチロック制御中であるので、マイクロコンピュータ2Mは、図10のステップS610において、「YES」と判定して、ステップS611に進む。電動モータ11の過熱保護が必要でない場合は、モータ温度Tが閾値Aより小さいので、マイクロコンピュータ2Mは、ステップS611において、「No」と判定して、ステップS615に進み、過熱保護モードフラグflgを「0」にセットする。そして、ステップS616に進み、フィードバック制御ゲインを通常制御ゲインにセットして、一旦本ルーチンを終了する。
【0080】
なお、電動ブレーキ装置がアンチロック制御中でない場合、過熱保護モードへの移行判定及びフィードバック制御ゲインの変更方法は、第1実施形態と同じである。図10においては、共通するステップに図8と同じ符号を付して、その説明を省略する。
【0081】
(変形形態1)
モータ電流Iが遮断されたときにブレーキパッド108、110をディスクロータ102から離間させる機構(以下、「ディスクロータ離間機構」という。)を電動ブレーキアクチュエータ部10が備えている場合は、以下の形態も取り得る。ディスクロータ離間機構は、例えば、特許文献1に示すようなコイルばねの弾性復元力を用いた構成とすることができる。
【0082】
既述のとおり、アンチロック制御中に電動モータ11の過熱保護が必要となったとき、電動ブレーキアクチュエータ部10が減圧中は、フィードバック制御ゲインを通常制御ゲインにしている。この際、電動モータ11のモータ電流Iを遮断することによって、電動ブレーキアクチュエータ部10が減圧することもできる。例えば、駆動信号演算部24が電動モータ11のモータ電流Iを遮断する駆動信号を生成することによって、モータ電流Iを遮断することができる。駆動信号は、例えば、PWM制御におけるパルスのON幅をゼロとした信号が挙げられる。モータ電流Iが遮断されると、ディスクロータ離間機構が働き、実加圧力(実制動力)Pを低下させることができる。電動ブレーキアクチュエータ部10の減圧中に電動モータ11に電流が流れないので、電動モータ11の過熱を抑えることができる。
【0083】
(変形形態2)
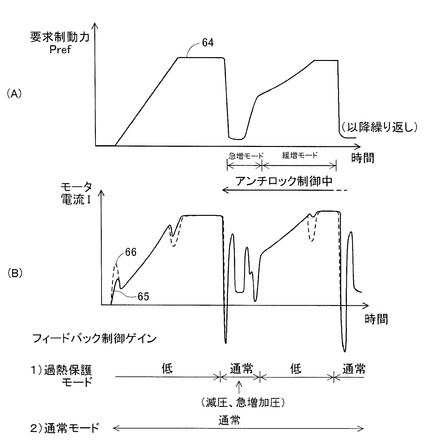
図12は、変形形態2に係る電動ブレーキ装置の要求制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は要求制動力を(B)はモータ電流を示している。具体的には、要求制動力Prefを曲線64で示し、モータ電流Iを実線65で示している。
【0084】
同図(A)に示されるように、変形形態2に係るアンチロック制御は、要求制動力Prefが急激に増加する急増モードと、要求制動力Prefが緩やかに増加する緩増モードと、を有しており、アンチロック制御中において、電動ブレーキアクチュエータ部10の加圧が2段階で行われる。
【0085】
急増モードで加圧中にフィードバック制御ゲインを低下させると、制動力の立ち上がりが遅れることが考えられる。そのため、本変形形態では、アンチロック制御中において、電動ブレーキアクチュエータ部10が減圧中又は急増モードで加圧中は、フィードバック制御ゲインを通常制御ゲインにする。そして、アンチロック制御中において、電動ブレーキアクチュエータ部10が緩増モードで加圧中は、フィードバック制御ゲインを低下させる。なお、比較例として、フィードバック制御ゲインを低下させないで通常制御ゲインのままにした場合(通常モード)のモータ電流Iを同図(B)において破線66で示す。
【0086】
このような制御を行うことにより、アンチロック制御の性能低下を極力抑えつつ、電動モータ11の過熱を抑制することができる。
【0087】
(3)第3実施形態
第3実施形態の電動ブレーキ装置は、第1実施形態の電動ブレーキ装置と基本的には同様の構成、作用効果を有する。共通する部位には共通の符号を付し、異なる部分を中心に説明する。本実施形態では、トラクション制御中に電動モータ11の過熱保護が必要となったときに、電動ブレーキアクチュエータ部10が減圧中は、電流変動量抑制補正部26がフィードバック制御ゲインを低下させ、電動ブレーキアクチュエータ部10が加圧中は、電流変動量抑制補正部26がフィードバック制御ゲインを通常制御ゲインにすることに特徴がある。本実施形態は、第1実施形態と比べて、過熱保護モード判定部25及び電流変動量抑制補正部26の制御フローが異なる。
【0088】
車両が発進、加速する際に車輪に大きな駆動力が加わると、車輪が空転することがある。車輪の空転を防止する方法として、トラクション制御(TRC制御)が知られている。トラクション制御は、車速と各車輪の車輪速度から車輪の空転を検知して、空転した車輪の駆動力を低減することにより、車輪の空転を解消する。また、トラクション制御では、空転した車輪の駆動力を低減するとともに、空転を起こしている車輪に制動力を加えて、空転の解消を補助することも行われている。トラクション制御自体は良く知られているので、本明細書ではこれ以上の説明は省略する。以下、トラクション制御中における過熱保護モードへの移行判定及びフィードバック制御ゲインについて説明する。
【0089】
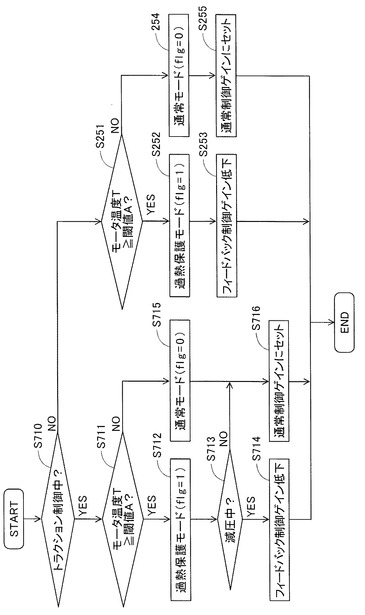
図13は、本実施形態における過熱保護モードへの移行可否を判定するフローチャートであり、図8に示すフローチャートの代わりに実行される。図13は、図4に示すステップS25及びステップS26の具体的な処理を示すものである。なお、図13では、トラクション制御中でない場合のフローチャートも併せて記載している。マイクロコンピュータ2Mは、空転している車輪に対して、制御周期毎に図13に示すフローチャートを実行する。4輪FL、FR、RL、RRにそれぞれ設けられている車輪速センサ46a〜46dの検出値(車輪速度VFL、VFR、VRL、VRR)と車速センサ41の検出値SPDとを比較することにより、空転している車輪を簡単に検知することができ、空転している車輪に対して上記のトラクション制御を行う。
【0090】
マイクロコンピュータ2Mは、ステップS710において、電動ブレーキ装置がトラクション制御中であるか否かを判定する。電動ブレーキ装置がトラクション制御中である場合は、ステップS710において、「YES」と判定して、ステップS711に進む。次に、ステップS711において、モータ温度検出部15の検出結果であるモータ温度Tが閾値Aより大きいか否かを判定する。第1実施形態と同様に、モータ温度Tの検出は、既述の温度センサ及び/又はモータ電流センサ45を用いることができる。モータ温度Tが閾値A以上の場合は、マイクロコンピュータ2Mは、ステップS711において、「YES」と判定して、ステップS712に進み、過熱保護モードフラグflgを「1」にセットする。
【0091】
次に、マイクロコンピュータ2Mは、ステップS713に進み、電動ブレーキアクチュエータ部10が減圧中であるか否かを判定する。電動ブレーキアクチュエータ部10が減圧中である場合は、ステップS713において、「YES」と判定して、ステップS714に進む。そして、ステップS714において、フィードバック制御ゲインを低下させて、一旦本ルーチンを終了する。フィードバック制御ゲインを低下させる方法は、第1実施形態と同様である。なお、電動ブレーキアクチュエータ部10が加圧中は、ステップS713において、「No」と判定して、ステップS716に進む。そして、ステップS716において、フィードバック制御ゲインを通常制御ゲインにセットして、一旦本ルーチンを終了する。
【0092】
本実施形態では、電動ブレーキアクチュエータ部10が加圧中はフィードバック制御ゲインを通常制御ゲインにしている。既述のとおり、トラクション制御では、空転している車輪に制動力を加えて、空転の解消を補助する。そのため、電動ブレーキアクチュエータ部10が加圧中は、制動トルクを急増させる必要がある。本実施形態では、フィードバック制御ゲインを通常制御ゲインにすることにより、フィードバック制御の応答性を確保している。
【0093】
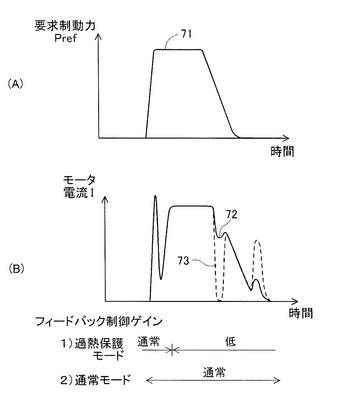
図14は、本実施形態に係る電動ブレーキ装置の要求制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は要求制動力を(B)はモータ電流を示している。このとき、電動ブレーキ装置はトラクション制御中であり、モータ温度Tは閾値A以上で過熱保護モード中であるとする。
【0094】
図14(A)では、要求制動力Prefを曲線71で示している。同図は、空転している車輪に制動力を印加することを示している。同図(B)では、電動ブレーキアクチュエータ部10が減圧中(電動モータ11は逆転)にフィードバック制御ゲインを低下させた場合のモータ電流Iを実線72で示している。なお、フィードバック制御ゲインは、すべてのフィードバック制御ゲインを通常制御ゲインに対してそれぞれ同じ割合で低下させている。また、比較例として、フィードバック制御ゲインを低下させないで通常制御ゲインのままにした場合(通常モード)のモータ電流Iを破線73で示している。
【0095】
トラクション制御中において、電動ブレーキアクチュエータ部10が減圧中にフィードバック制御ゲインを低下させた場合は、フィードバック制御ゲインが通常制御ゲインのままの場合と比べて、減圧中はフィードバック制御の応答が緩やかになり、モータ電流Iの電流変動を抑制することができる。
【0096】
本節の最後に、トラクション制御中に電動モータ11の過熱保護が必要でない場合について簡単に説明する。電動ブレーキ装置はトラクション制御中であるので、マイクロコンピュータ2Mは、図13のステップS710において、「YES」と判定して、ステップS711に進む。電動モータ11の過熱保護が必要でない場合は、モータ温度Tが閾値Aより小さいので、マイクロコンピュータ2Mは、ステップS711において、「No」と判定して、ステップS715に進み、過熱保護モードフラグflgを「0」にセットする。そして、ステップS716に進み、フィードバック制御ゲインを通常制御ゲインにセットして、一旦本ルーチンを終了する。
【0097】
なお、電動ブレーキ装置がトラクション制御中でない場合、過熱保護モードへの移行判定及びフィードバック制御ゲインの変更方法は、第1実施形態と同じである。図13おいては、共通するステップに図8と同じ符号を付して、その説明を省略する。
【0098】
(変形形態)
第1実施形態〜第3実施形態を組み合わせた実施形態とすることもできる。本変形形態によれば、アンチロック制御及びトラクション制御のいずれにも対応した過熱保護モードへの移行判定及びフィードバック制御ゲインの変更を行うことができる。具体的には、まず、アンチロック制御中か否かを図10に示すフローチャートに従って判定し、アンチロック制御中である場合は、過熱保護モードへの移行判定及びフィードバック制御ゲインの変更を行う。アンチロック制御中でない場合は、トラクション制御中か否かを図13に示すフローチャートに従って判定し、トラクション制御中である場合は、過熱保護モードへの移行判定及びフィードバック制御ゲインの変更を行う。アンチロック制御中でもトラクション制御中でもない場合は、図8に示すフローチャートに従って、過熱保護モードへの移行判定及びフィードバック制御ゲインの変更を行う。なお、トラクション制御の判定処理を先に行い、その後にアンチロック制御の判定処理を行うこともできる。
【0099】
(4)第4実施形態
第4実施形態の電動ブレーキ装置は、第1実施形態〜第3実施形態の電動ブレーキ装置と基本的には同様の構成、作用効果を有する。共通する部位には共通の符号を付し、異なる部分を中心に説明する。本実施形態では、過熱保護モード時に、要求制動力演算部22が要求制動力に勾配制限を設けることに特徴がある。本実施形態は、第1実施形態〜第3実施形態と比べて、要求制動力演算部22が異なる。
【0100】
既述のとおり、第1実施形態では、要求制動力演算部22が図4のステップS22で要求制動力演算を行う毎に、要求制動力演算部22が踏力F及び/又は操作ストロークSTから要求制動力Prefを演算する。しかしながら、短時間に踏力F及び/又は操作ストロークSTが増加する場合は、それに合わせて要求制動力Prefも変化するため、モータ電流Iがオーバーシュート又はアンダーシュートする可能性がある。特に、過熱保護モード時にモータ電流Iがオーバーシュート又はアンダーシュートすると、モータ温度Tのさらなる上昇を招くことになる。
【0101】
そこで、本実施形態では、過熱保護モード時に、要求制動力演算部22が要求制動力Prefに勾配制限を設ける。具体的には、過熱保護モード時(過熱保護モードフラグflgが「1」のとき)に、制動力演算部22の演算結果Pref1から前回の演算結果Pref0を減算して偏差Peを求める。偏差Peが所定値B(正の数)より大きい場合は、要求制動力Prefは、前回の演算結果Pref0に所定値Bを加算したものを使用する。偏差Peが所定値B(正の数)以下の場合は、要求制動力Prefは、演算結果Pref1を使用する。所定値Bは、例えば、既知の計算機シミュレーションによって求めることができる。シミュレーションモデルは図6に示すブロック線図から容易に作成することができる。本実施形態では、過熱保護モード時に要求制動力Prefが急増することを防止することができ、モータ温度Tの上昇を抑えることができる。
【0102】
(変形形態)
過熱保護モード時に、要求制動力演算部22が要求制動力Prefにフィルタを掛けることもできる。フィルタは、アナログフィルタであってもデジタルフィルタであっても良いが、過熱保護モード時のみフィルタを掛けることを考慮すると、デジタルフィルタが好ましい。また、フィルタは、ローパスフィルタが好ましい。ローパスフィルタは、踏力F及び/又は操作ストロークSTを入力信号とした場合に、入力信号のうちカットオフ周波数よりも低い周波数帯域の入力信号のみを通過させる。そのため、入力信号がステップ状に変化した場合であっても、出力信号は緩やかに入力信号に追従することができる。したがって、要求制動力Prefに勾配制限を設けた場合と同様の効果が得られる。つまり、過熱保護モード時に要求制動力Prefが急増することを防止することができ、モータ温度Tの上昇を抑えることができる。なお、要求制動力Prefに勾配制限を設けるとともに、フィルタを掛けることもできる。
【0103】
ローパスフィルタの構成は、特に限定されない。アナログフィルタの場合は、例えば、抵抗器及びコンデンサを用いた既知のローパスフィルタを使用することができる。デジタルフィルタの場合は、例えば、FIRフィルタを使用することができる。FIRフィルタは、過去の入力信号の移動平均を算出することによって、簡単にローパスフィルタを実現できる。カットオフ周波数は、要求制動力Prefに勾配制限を設けた場合と同様に、既知の計算機シミュレーションによって求めることができる。
【0104】
(5)その他
本発明は上記し且つ図面に示した実施形態のみに限定されるものではなく、要旨を逸脱しない範囲内で適宜変更して実施可能である。例えば、本発明は、電動ブレーキアクチュエータ部10を4輪全てに適用する場合だけでなく、電動ブレーキアクチュエータ部10を前輪のみ又は後輪のみに適用することもできる。
【符号の説明】
【0105】
10:電動ブレーキアクチュエータ部
11:電動モータ 13:制動力検出部 15:モータ温度検出部
20:電気制御部
22:要求制動力演算部 23:フィードバック制御演算部
24:駆動信号演算部 25:過熱保護モード判定部
26:電流変動量抑制補正部
30:駆動回路部
50:ペダル操作部
【技術分野】
【0001】
本発明は、電動モータにより制動トルクを制御する電動ブレーキ装置に関する。
【背景技術】
【0002】
電動モータにより制動トルクを制御する制御装置の一例として、例えば、特許文献1及び2に挙げられる発明が知られている。特許文献1に記載の発明は、操作者のブレーキ操作量に基づいた目標加圧力と実際の加圧力とから必要な制動トルクを判定し、判定値に応じた電流を電動モータに供給する車両用ブレーキの制御装置である。特許文献1に記載の発明は、制動トルクを減少すべきと判定した際にモータへの供給電流を遮断すると共に、スリップ率に基づいて制動トルクを減少すべきと判定したときには、モータ逆回転方向の電流を供給することで、モータ作動頻度を低減し、モータのブラシ寿命を延ばすことを図っている。
【0003】
特許文献2に記載の発明は、電動パワーステアリング装置において、モータの温度推定を行い、その推定値が上限温度を超えないように、モータへの通電に制限を設けて、モータの過熱を防止している。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第3740007号公報
【特許文献2】特許第3715136号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明では、モータの発熱に関して考慮されておらず、ABS(アンチロック・ブレーキ・システム)、ESC(横滑り防止機構)又はTRC(トラクション・コントロール・システム)のように急減圧が必要となる場合や、急制動及び急減圧を繰り返した場合にモータコイルが過熱するおそれがある。特許文献1に記載の発明において、モータコイルの過熱を防止しようとすると、熱容量が大きな体格が大きいモータが必要となる。
【0006】
また、特許文献2に記載の発明では、モータの過熱を防止するために、モータへの通電に制限を設けており、実際の制動力が要求制動力に到達しない可能性がある。
【0007】
本発明は、上記実情に鑑みてなされたものであり、制動力の低下を抑えつつ、モータコイルやモータブラシの過熱を抑制することが可能な電動ブレーキ装置を提供することを課題とする。
【課題を解決するための手段】
【0008】
請求項1に係る電動ブレーキ装置は、車輪と一体に回転する被制動部材に摩擦材を電動モータにより押圧して制動力を発生させる電動ブレーキアクチュエータ部と、運転者によるブレーキ操作を検出するペダル操作部と、前記ペダル操作部により検出されたブレーキ操作量から要求制動力を演算して前記電動モータの駆動信号を生成する電気制御部と、前記駆動信号に基づいて前記電動ブレーキアクチュエータ部を駆動させる駆動回路部と、を備える電動ブレーキ装置において、前記電動ブレーキアクチュエータ部は、前記車輪に生じる実制動力を検出する制動力検出部と、前記電動モータのモータ温度を検出するモータ温度検出部と、を有し、前記電気制御部は、前記ブレーキ操作量に基づいて前記要求制動力を演算する要求制動力演算部と、前記要求制動力に前記実制動力をフィードバックして制御制動力を演算するフィードバック制御演算部と、前記制御制動力に基づいて前記電動モータの駆動信号を生成する駆動信号演算部と、前記モータ温度検出部の検出結果に基づいて前記電動モータの過熱を抑える過熱保護モードに移行するか否かを判定する過熱保護モード判定部と、前記過熱保護モード判定部が前記過熱保護モードと判定したときに前記電動モータへ供給する電流の電流変動量を抑制する電流変動量抑制補正部と、を有することを特徴とする。
【0009】
請求項2に係る電動ブレーキ装置は、請求項1において、前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、フィードバック制御ゲインを低下させる。
【0010】
請求項3に係る電動ブレーキ装置は、請求項1又は2において、アンチロック制御中に前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、前記電動ブレーキアクチュエータ部が加圧中はフィードバック制御ゲインを低下させ、前記電動ブレーキアクチュエータ部が減圧中は前記フィードバック制御ゲインを通常制御ゲインにする。
【0011】
請求項4に係る電動ブレーキ装置は、請求項3において、前記駆動信号演算部は、前記減圧中に前記電動モータの電流を遮断する駆動信号を生成する。
【0012】
請求項5に係る電動ブレーキ装置は、請求項1又は2において、アンチロック制御は、前記要求制動力が急激に増加する急増モードと、前記急増モードと比較して前記要求制動力が緩やかに増加する緩増モードと、を有し、前記アンチロック制御中に前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、前記電動ブレーキアクチュエータ部が前記緩増モードで加圧中はフィードバック制御ゲインを低下させ、前記電動ブレーキアクチュエータ部が減圧中又は前記急増モードで加圧中は前記フィードバック制御ゲインを通常制御ゲインにする。
【0013】
請求項6に係る電動ブレーキ装置は、請求項1〜5において、トラクション制御中に前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、前記電動ブレーキアクチュエータ部が減圧中はフィードバック制御ゲインを低下させ、前記電動ブレーキアクチュエータ部が加圧中は前記フィードバック制御ゲインを通常制御ゲインにする。
【0014】
請求項7に係る電動ブレーキ装置は、請求項1〜6において、前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記要求制動力演算部は、前記要求制動力に勾配制限を設ける。
【0015】
請求項8に係る電動ブレーキ装置は、請求項1〜7において、前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記要求制動力演算部は、前記要求制動力にフィルタを掛ける。
【発明の効果】
【0016】
請求項1に係る電動ブレーキ装置によれば、電動モータの過熱保護が必要となったときに、電流変動量抑制補正部が電動モータへ供給する電流の電流変動量を抑制するので、制動力の低下を抑えつつ、モータコイルやモータブラシの過熱を抑制することができる。
【0017】
請求項2に係る電動ブレーキ装置によれば、電動モータの過熱保護が必要となったときに、電流変動量抑制補正部がフィードバック制御ゲインを低下させるので、過熱保護モード時にフィードバック制御の応答が緩やかになり、電動モータへ供給する電流の電流変動量を抑制することができる。
【0018】
請求項3に係る電動ブレーキ装置によれば、アンチロック制御中に電動モータの過熱保護が必要となったときに、電動ブレーキアクチュエータ部の加圧中にフィードバック制御ゲインを低下させるので、減圧中はフィードバック制御の応答性を確保して、加圧中はフィードバック制御の応答を緩やかにすることができる。そのため、電動ブレーキアクチュエータ部の加圧中において、電動モータへ供給する電流の電流変動量を抑制することができる。
【0019】
請求項4に係る電動ブレーキ装置によれば、請求項3において、電動ブレーキアクチュエータ部の減圧中に、電動モータに電流が供給されないので、電動モータの過熱を抑えることができる。
【0020】
請求項5に係る電動ブレーキ装置によれば、アンチロック制御中に電動モータの過熱保護が必要となったときに、電動ブレーキアクチュエータ部が緩増モードで加圧中はフィードバック制御ゲインを低下させ、電動ブレーキアクチュエータ部が減圧中又は急増モードで加圧中はフィードバック制御ゲインを通常制御ゲインにするので、アンチロック制御の性能低下を極力抑えつつ、電動モータの過熱を抑制することができる。
【0021】
請求項6に係る電動ブレーキ装置によれば、トラクション制御中に電動モータの過熱保護が必要となったときに、電動ブレーキアクチュエータ部の減圧中にフィードバック制御ゲインを低下させるので、加圧中はフィードバック制御の応答性を確保して、減圧中はフィードバック制御の応答を緩やかにすることができる。そのため、電動ブレーキアクチュエータ部の減圧中において、電動モータへ供給する電流の電流変動量を抑制することができる。
【0022】
請求項7及び8に係る電動ブレーキ装置によれば、過熱保護モード判定部が過熱保護モードと判定したときに、要求制動力演算部が要求制動力の急増又は急減を抑制することができるので、電動モータへ供給する電流の電流変動量を抑制することができる。
【図面の簡単な説明】
【0023】
【図1】第1実施形態に係る電動ブレーキ装置の全体図である。
【図2】図1に示す電動ブレーキアクチュエータ部の断面図である。
【図3】電気制御部における制御ブロック図である。
【図4】第1実施形態における制御フロー(メインルーチン)を示すフローチャートである。
【図5】踏力と要求制動力(要求加圧力)の関係を示す図である。
【図6】フィードバック制御のブロック線図である。
【図7】制御制動力とモータ電流の関係を示す図である。
【図8】第1実施形態における過熱保護モードへの移行可否を判定するフローチャートである。
【図9】過熱保護モード中の電動ブレーキ装置の実制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は実制動力を(B)はモータ電流を示す。
【図10】第2実施形態における過熱保護モードへの移行可否を判定するフローチャートである。
【図11】第2実施形態に係る電動ブレーキ装置の要求制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は要求制動力を(B)はモータ電流を示す。
【図12】第2実施形態の変形形態2に係る電動ブレーキ装置の要求制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は要求制動力を(B)はモータ電流を示す。
【図13】第3実施形態における過熱保護モードへの移行可否を判定するフローチャートを示している。
【図14】第3実施形態に係る電動ブレーキ装置の要求制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は要求制動力を(B)はモータ電流を示す。
【発明を実施するための形態】
【0024】
以下、本発明の実施形態を図面に基づいて説明する。なお、各実施形態について共通の箇所には共通の符号を付して対応させることにより重複する説明を省略する。なお、各図は概念図であり、細部構造の寸法まで規定するものではない。
【0025】
(1)第1実施形態
図1は、本実施形態に係る電動ブレーキ装置の全体図を示している。本実施形態の電動ブレーキ装置は、左右前輪FL、FR及び左右後輪RL、RRに設けられ電動モータ11により制動力を発生させる電動ブレーキアクチュエータ部10と、運転者によるブレーキ操作を検出するペダル操作部50と、ペダル操作部50により検出されたブレーキ操作量から要求制動力を演算して電動モータ11の駆動信号を生成する電気制御部20と、駆動信号に基づいて電動ブレーキアクチュエータ部10を駆動させる駆動回路部30と、を具備している。
【0026】
本実施形態では、ペダル操作部50のブレーキペダル51が運転者によって踏み込まれ、ペダルアーム52がそれに伴って揺動すると、その操作量が踏力センサ43やストロークセンサ44で検出される。そして、その検出信号が電気制御部20に入力されることでブレーキペダル51の操作量が検出され、電気制御部20が駆動回路部30を介して、電動モータ11を駆動することにより、電動ブレーキアクチュエータ部10が各車輪FL〜RRに対して制動力を発生させる。以下、詳細に説明する。
【0027】
(1−1)電動ブレーキアクチュエータ部10
図2は、図1に示す電動ブレーキアクチュエータ部の断面図を示している。図2は、電動ブレーキの一例を示したものであり、電動ブレーキアクチュエータ部10は、ディスクブレーキに限定されるものではない。例えば、ドラムブレーキなど種々の電動ブレーキに使用することができ、要旨を逸脱しない範囲内で適宜変更して実施することができる。
【0028】
電動ブレーキアクチュエータ部10は、車輪と一体に回転する被制動部材であるディスクロータ102を備えている。ディスクロータ102の両面はそれぞれ摩擦面104、106とされ、摩擦面104、106に対向して一対のブレーキパッド108、110が配設されている。各ブレーキパッド108、110は、前面において各摩擦面104、106と接触する摩擦材108a、110aをそれぞれ備えるとともに、同摩擦材108a、110aの背面に鋼製の裏板108b、110bが固着された構造を有している。
【0029】
また、電動ブレーキアクチュエータ部10は、マウンティングブラケット112を備えている。マウンティングブラケット112は、一対のブレーキパッド108、110を跨ぐ状態で車体側部材に回転不能に取付けられ、同一対のブレーキパッド108、110を同ディスクロータ102の回転軸線に平行な方向に移動可能となるように保持している。
【0030】
さらに、電動ブレーキアクチュエータ部10は、キャリパ114を有している。キャリパ114は、図示しないアームを一体に備えていて、このアームからパッド移動方向に平行に伸びる一対の図示しないピンがマウンティングブラケット112のピン孔に摺動可能に嵌合されることにより、ディスクロータ102の回転軸線に平行な方向に移動可能に保持されている。
【0031】
一対のブレーキパッド108、110のうちの内側のインナパッド110の背後には、加圧部材116が軸方向に移動可能に配設されている。加圧部材116は、所定量だけインナパッド110方向に移動したとき、その前面において同インナパッド110の背面に当接させられるようになっている。また、加圧部材116の背後には電動モータ11が配置されている。加圧部材116と電動モータ11は、パッド移動方向に平行に互いに同軸に配置されるとともに、運動変換機構としてのボールねじ118により互いに連結されている。
【0032】
電動モータ11のハウジング120は、円筒状をなす本体部120aと、同本体部120aの一方の開口を閉塞する閉塞部120bとが図示しないボルトにより一体的に結合されることにより構成され、他方の開口の端部においてキャリパ114に対して図示しないボルトにより固定されている。電動モータ11のステータ122は、ハウジング120の内側に固定されていて、金属製のコア124と、コア124に巻回されたコイル126とを備えている。また、ステータ122に僅かな距離を隔てて対向する状態で、永久磁石128が設けられている。永久磁石128は、ボールねじ118のナット130に固定され、同ナット130とともに電動モータ11のロータを構成している。
【0033】
ナット130は、貫通孔を有する円筒形状をなし、ラジアル軸受け132を介してモータハウジング120の閉塞部120bに回転可能に支持される小径部と、ラジアルスラスト軸受け134を介してキャリパ114に回転可能、且つ軸方向に移動不能に支持される大径部とを有している。ナット130の大径部と小径部との間の外周部には永久磁石128が固定されている。ナット130の内周面には、ボールねじ118のボールを保持するためのボール溝が等間隔にて形成されている。また、ナット130はボール溝の適宜個所から同ボール溝の他の個所に至るボール経路を構成する図示しないチューブを有している。
【0034】
ナット130の外周部にはN極及びS極が等間隔で交互に配置された永久磁石136が固定されている。この永久磁石136に対向するようにホール素子からなる位置センサ12がキャリパ114に固定されている。位置センサ12は、ナット130の回転を永久磁石136の回転に伴う磁界の変化に基づいて検出することで制動部材であるインナパッド110のモータ11に対する相対位置Xを検出するようになっている。
【0035】
加圧部材116には、ナット130の内部を挿通するネジ軸138が一体に形成されていて、同ネジ軸138の外周には、ボールねじ118のボール溝が所定のリード角を有するように形成されている。このネジ軸138のボール溝及びナット130の内周に形成されたボール溝と、チューブとによってボールねじのボールの循環経路が形成される。ボールねじ118は、この循環経路内に複数のボール140が一列に連続して収容されることにより構成される周知の形式のものである。なお、本例においては、ボールねじ118の循環経路をチューブ式としたが、所謂コマ式であってもよい。
【0036】
このような構成により、ナット130が電動モータ11により正転(所定の方向に回転)されるとボールねじ118の作用によりネジ軸138が図2において右方向に移動し、加圧部材116が制動部材であるインナパッド110を被制動部材であるディスクロータ102に向けて押動するとともに、同ディスクロータ102に押圧する。
【0037】
加圧部材116のインナパッド110に当接する面には、車輪に生じる実制動力を検出する制動力検出部13が埋設されている。制動力検出部13は、例えば、歪センサである加圧力センサを用いることができる。加圧力センサ13は、加圧部材116がインナパッド110を押圧する実際の加圧力(実加圧力P)を加圧部材116に生じる歪み量から検出することができる。本明細書では、この加圧力(実加圧力P)を「実制動力」という。
【0038】
また、本明細書では、ナット130が正転する方向に電動モータ11が回転するとき、電動モータ11は「正転」しており、電動ブレーキアクチュエータ部10は、「加圧」しているものとする。このときに電動モータ11に流れるモータ電流Iは、説明の便宜上、「正の方向」に流れているものとする。逆に、ナット130が逆転する方向に電動モータ11が回転するとき、電動モータ11は「逆転」しており、電動ブレーキアクチュエータ部10は、「減圧」しているものとする。このときに電動モータ11に流れるモータ電流Iは、説明の便宜上、「負の方向」に流れているものとする。このように、電動モータ11の回転方向を変えることにより、制動力を増減させることができる。
【0039】
さらに、電動モータ11のコイル126付近には、コイル126に近接してモータ温度検出部15が備えられている。モータ温度検出部15は、コイル126及びコア124と絶縁されてコア124に支持されている。モータ温度検出部15は、例えば、サーミスタ、熱電対などの市販の温度センサを用いることができる。モータ駆動時は、コイル126が高温となるため、コイル126に近接してモータ温度検出部15を配置することにより、電動モータ11の過熱状態を的確に把握することができる。なお、ブラシ付きの電動モータの場合、モータ温度検出部15は、コイルだけでなく、ブラシに近接して配置することができる。モータ駆動時は、モータコイルやブラシが高温となるため、両者に近接してモータ温度検出部15を配置することにより、電動モータの過熱状態を的確に把握することができる。
【0040】
(1−2)電気制御部20
図1に示すように、電気制御部20は、図示しないメモリ及びCPUを備えるマイクロコンピュータ2Mを有しており、メモリ内に格納されたプログラムを実行することによって、電動ブレーキアクチュエータ部10を制御することができる。制御の詳細は後述する。
【0041】
また、電気制御部20は、位置センサ12と、制動力検出部(加圧力センサ)13と、図示しない変速機の出力軸の回転を検出することにより車両の速度(以下、「車速」という。)SPDを検出する車速センサ41と、運転者によるブレーキペダル51のペダル踏力Fを検出する踏力センサ43と、ブレーキペダル51の操作ストロークSTを検出するストロークセンサ44と、電動モータ11のモータ電流Iを検出するモータ電流センサ45と、4輪FL、FR、RL、RRにそれぞれ設けられ各輪の車輪速度VFL、VFR、VRL、VRRを検出する車輪速センサ46a〜46dと、コイル126のモータ温度Tを検出するモータ温度検出部15と、が接続されていて、これらの検出信号を入力することができる。電気制御部20は、駆動回路部30に接続されており、駆動回路部30に電動モータ11の駆動信号を出力する。
【0042】
(1−3)駆動回路部30
駆動回路部30は、入力側が電気制御部20に、出力側が電動モータ11に接続されるとともに電源としての図示しない車両バッテリと接続されたスイッチング回路である。駆動回路部30は、電気制御部20からの駆動信号(駆動信号には電流の向きも含まれる。)に応じた電流を各々の電動モータ11に供給することができ、例えば、インバータにより構成することができる。駆動回路部30は、電動モータ11を回転させることにより、電動ブレーキアクチュエータ部10を駆動させることができる。駆動回路部30と各電動モータ11の電流供給ラインにはモータ電流センサ45が接続されている。モータ電流センサ45は、電動モータ11に実際に供給される実供給電流Iを検出することができる。モータ電流センサ45は、例えば、ホール素子を使用した電流センサを用いることができる。
【0043】
(1−4)ペダル操作部50
ペダル操作部50は、運転者によるブレーキペダル51のペダル踏力Fを検出する踏力センサ43と、ブレーキペダル51の操作ストロークSTを検出するストロークセンサ44と、を有している。踏力センサ43及びストロークセンサ44は、特に限定されず、市販の踏力センサ及びストロークセンサを用いることができる。例えば、コイルばねの弾性復元力を用いたセンサが挙げられる。
【0044】
(1−5)電動ブレーキ装置の制御
図3は、電気制御部における制御ブロック図を示している。図4は、本実施形態における制御フロー(メインルーチン)を示すフローチャートである。電気制御部20は、メモリ内に格納されたプログラムを実行することによって、本電動ブレーキ装置の制御を行うことができる。プログラムは、図4に示すフローに従って所定時間の経過毎(以下、制御周期という。)に繰り返し実行される。つまり、ステップS21においてペダル操作判定を行い、以下順に、ステップS22で要求制動力演算を、ステップS25で過熱保護モード判定を、ステップS26で電流変動量抑制補正を、ステップS23でフィードバック制御演算を、ステップS24で駆動信号演算を行う。
【0045】
ペダル操作判定はペダル操作判定部21が行い、要求制動力演算は要求制動力演算部22が行う。フィードバック制御演算はフィードバック制御演算部23が行い、駆動信号演算は駆動信号演算部24が行う。過熱保護モード判定は過熱保護モード判定部25が行い、電流変動量抑制補正は電流変動量抑制補正部26が行う。以下、詳細に説明する。
【0046】
(1−5−1)ペダル操作判定部21
ペダル操作判定部21では、踏力センサ43及び/又はストロークセンサ44のいずれの検出値を用いて、要求制動力Prefを演算するかを判定する。要求制動力Prefは、いずれか一方の検出値から演算することができる。両方の検出値を用いれば、検出精度を上げることができる。また、制動力の大きさによって使用する検出値を使い分けることもできる。
【0047】
(1−5−2)要求制動力演算部22
図5は、踏力と要求制動力(要求加圧力)の関係を示している。要求制動力演算部22では、ペダル操作判定部21で選択された踏力センサ43及び/又はストロークセンサ44の検出値(踏力F及び/又は操作ストロークST)から要求制動力Prefを演算する。
【0048】
踏力F及び/又は操作ストロークSTと要求制動力Prefの関係は、予めマイクロコンピュータ2Mが参照するメモリ内にマップとして格納されている。図5に示すように、例えば、踏力FがF22のとき、要求制動力PrefはP22であるので、F22とP22の組み合わせをマップとして格納しておく。そして、踏力センサ43による踏力の検出値がF22のとき、P22をマップから読み出して要求制動力Prefを求めることができる。また、踏力Fと要求制動力Prefの関係を示す近似線221から予め近似式を求めておいて、踏力Fを近似式に代入することによって要求制動力Prefを求めることもできる。以上のことは、操作ストロークSTについても同様である。なお、両方のセンサからの検出値を用いる場合は、前節で説明した方法の他に、例えば、踏力センサ43から得られる要求制動力Prefと、ストロークセンサ44から得られる要求制動力Prefと、の平均値を求めて、その平均値を要求制動力Prefとすることもできる。
【0049】
(1−5−3)フィードバック制御演算部23
図6は、フィードバック制御のブロック線図を示している。フィードバック制御演算部23は、要求制動力Prefに実制動力Pをフィードバックして制御制動力P*を演算する。フィードバック制御演算部23は、例えば、既知の比例制御(P制御)、積分制御(I制御)及び微分制御(D制御)のうち、少なくとも1つの制御を行うことによって、制御制動力P*を演算することができる。図6は、比例制御(P制御)、積分制御(I制御)及び微分制御(D制御)をすべて行うPID制御のブロック線図の一例を示したものであり、このブロック線図に限定されるものではない。例えば、実制動力PにフィードバックゲインKfを乗じて、それをフィードバックさせても良く、要旨を逸脱しない範囲内で適宜変更して実施することができる。以下、フィードバック制御について説明する。
【0050】
要求制動力演算部22の出力である要求制動力Prefと、制動力検出部13による検出値である実制動力Pと、が減算器231によって減算され、偏差e(=Pref−P)が得られる。偏差eは、乗算器232によって乗算されて演算結果ePが得られる。偏差eは、積分器233によって積分されて演算結果eIが得られる。また、偏差eは、微分器234によって微分されて演算結果eDが得られる。そして、演算結果eP、eI及びeDが加算器235で加算されて、制御制動力P*が得られる。図中、KPは比例ゲインを、KIは積分ゲインを、KDは微分ゲインを、それぞれ示しており、「s」は、ラプラス変換における複素数を示している。この場合の伝達関数G(s)は、下記数1で表すことができる。
(数1)
G(s)=KP+KI×1/s+KD×s
【0051】
比例ゲインKP、積分ゲインKI及び微分ゲインKDの初期値は、電気制御部20のメモリ内に格納されたプログラムに記憶されており、電気制御部20の起動時(プログラムが図4に示すフローに従って初めて実行されるとき。以下同じ。)にメモリから読み込まれる。比例ゲインKP、積分ゲインKI及び微分ゲインKDは、後述する過熱保護モード中に制御ゲインを低下させる場合を除いて一定値であり、電動モータ11のモータ特性(巻線抵抗、リアクタンス、誘起電圧など)及び制御仕様から決定される。比例ゲインKPを大きくすると、偏差eのオフセット(定常偏差)を短時間に小さくすることができる。積分ゲインKIを大きくすると、偏差eのオフセットを短時間にゼロにすることができる。また、微分ゲインKDを大きくすると、偏差eの振動を短時間に小さくすることができ、外乱に対して強くなる。PID制御及びパラメータ同定については、制御工学において周知であるので、これ以上の説明は省略する。
【0052】
なお、図6において、制御制動力P*は、除算器236によってトルク定数KTで除算されてモータ電流Iが得られ、モータ電流Iが電動モータ11に供給される。本実施形態では、除算器236は、駆動信号演算部24、駆動回路部30に相当する。
【0053】
(1−5−4)駆動信号演算部24
駆動信号演算部24は、フィードバック制御演算部23の演算結果である制御制動力P*に基づいて電動モータ11の駆動信号を生成する。電動モータ11の駆動信号は、例えば、PWM制御におけるパルスのON幅とOFF幅との比であるデューティ比を用いることができる。PWM制御においては、スイッチング素子がONのときに、対応する相に電流Iが流れ、スイッチング素子がONしている時間(ON幅)に応じてモータ電流Iは変化する。つまり、スイッチング素子がONしている時間(ON幅)が長くなると、モータ電流Iは大きくなり、ON幅が短くなると、モータ電流Iは小さくなる。
【0054】
図7は、制御制動力とモータ電流の関係を示している。直流モータでは、モータトルクはモータ電流に比例するので、制御制動力P*は、モータ電流Iに比例する。制御制動力P*は、既述のトルク定数KTを用いて、下記数2で表すことができる。
(数2)
P*=KT×I
【0055】
制御制動力P*を上式に代入することによってモータ電流Iを求めることができる。また、制御制動力P*とモータ電流Iの関係を示す近似線241から予め近似式を求めておいて、制御制動力P*を近似式に代入することによってモータ電流Iを求めることもできる。さらに、制御制動力P*とモータ電流Iとの関係は、予めマイクロコンピュータ2Mが参照するメモリ内にマップとして格納しておくこともできる。図7に示すように、例えば、制御制動力P*がP24のとき、モータ電流IはI24であるので、P24とI24の組み合わせをマップとして格納しておく。そして、制御制動力P*がP24のとき、I24をマップから読み出してモータ電流Iを求めることができる。
【0056】
(1−5−5)過熱保護モード判定部25
過熱保護モード判定部25は、モータ温度検出部15の検出結果に基づいて電動モータ11の過熱を抑える過熱保護モードに移行するか否かを判定する。図8は、本実施形態における過熱保護モードへの移行可否を判定するフローチャートを示している。図8は、図4に示すステップS25及びステップS26の具体的な処理を示すものである。以下、図8に基づいて説明する。
【0057】
マイクロコンピュータ2Mは、ステップS251において、モータ温度検出部15の検出結果であるモータ温度Tが閾値Aより大きいか否かを判定する。閾値Aは、電気制御部20のメモリ内に格納されたプログラムに記憶されており、電気制御部20の起動時にメモリから読み込まれる。閾値Aは、モータコイル及びモータブラシの耐熱許容温度に所定割合(安全率)を乗じた値にすることができる。例えば、耐熱クラスがE種のモータコイルを用いる場合は、耐熱許容温度は75℃であるので、安全率を90%と仮定すると、閾値Aは67.5℃とすることができる。
【0058】
モータ温度検出部15は、既述の温度センサの検出値を用いることができる。また、モータ温度検出部15は、既述のモータ電流センサ45の検出値からモータ温度Tを推定することもできる。電動モータ11のコイル抵抗をR、モータ電流をIとすると、モータコイルではRI2の電力が消費されてモータコイルが発熱する。モータ電流Iとモータ温度Tの関係を予め求めておくと、高価な温度センサ等を用いなくてもモータ温度Tを推定することができる。なお、温度センサとモータ電流センサ45とを併用して、両者の検出結果を補完(例えば、両者の平均値にするなど)して、モータ温度Tの検出精度を上げることもできる。
【0059】
図8において、モータ温度Tが閾値A以上の場合は、マイクロコンピュータ2Mは、ステップS251において、「YES」と判定して、ステップS252に進み、過熱保護モードに移行したことを示す過熱保護モードフラグflgを「1」にセットする。次に、ステップS253に進み、フィードバック制御ゲインを低下させて、一旦本ルーチンを終了する。
【0060】
モータ温度Tが閾値Aより小さい場合は、マイクロコンピュータ2Mは、ステップS251において、「No」と判定して、ステップS254に進み、過熱保護モードフラグflgを「0」にセットする。次に、ステップS255に進み、フィードバック制御ゲインを通常制御ゲインにセットして、一旦本ルーチンを終了する。
【0061】
本明細書では、過熱保護モードフラグflgが「0」の状態を「通常モード」と呼称し、過熱保護モードフラグflgが「1」の状態を「過熱保護モード」と呼称する。なお、電気制御部20の起動時は、過熱保護モードフラグflgは「0」にセットされている。また、「通常制御ゲイン」とは、電気制御部20の起動時にメモリから読み込まれる比例ゲインKP、積分ゲインKI及び微分ゲインKDの初期値のことをいう。通常制御ゲインは、一定値であれば良く、電気制御部20の起動後に変更することもできる。
【0062】
(1−5−6)電流変動量抑制補正部26
電流変動量抑制補正部26は、過熱保護モード判定部25が過熱保護モードと判定したときに、電動モータ11へ供給する電流の電流変動量を抑制する。例えば、過熱保護モード判定部25が過熱保護モードと判定したときに、電流変動量抑制補正部26がフィードバック制御ゲインを低下させることにより、電動モータ11へ供給する電流の電流変動量を抑制することができる。以下、具体的に説明する。
【0063】
図6において、要求制動力Prefが短時間に大きくなると、要求制動力Prefと実制動力Pとの偏差eも短時間に大きくなる。比例ゲインKPが通常制御ゲインのままのときは、過大した偏差eに比例ゲインKPが乗算されるので、演算結果ePは大きくなる。また、偏差eが短時間に大きくなると、偏差eの微分値は極めて大きくなるので、微分ゲインKDが通常制御ゲインのままのときは、演算結果eDも極めて大きくなる。よって、これらを加算して得られる制御制動力P*も極めて大きくなる。すると、制御制動力P*に比例するモータ電流Iも大きくなり、既述のとおりモータ電流Iの2乗に比例してモータ温度Tが上昇する。
【0064】
過熱保護モード判定部25が過熱保護モードと判定したときは、モータ温度Tは高温になっており、モータ温度Tのさらなる上昇を抑制する必要がある。そこで、本実施形態では、電流変動量抑制補正部26がフィードバック制御ゲインを低下させる。例えば、比例ゲインKPや微分ゲインKDを通常制御ゲインより小さくすると、偏差eが短時間に大きくなっても演算結果eP、eDの増加を抑えることができるので、制御制動力P*が短時間に大きくなることを抑制することができる。
【0065】
また、積分ゲインKIを小さくすると、積分ゲインKIが通常制御ゲインのままのときと比べて、偏差eのオフセットをゼロにするまでに時間を要する。そのため、積分ゲインKIを通常制御ゲインより小さくすると、制御制動力P*と要求制動力Prefのオフセットをゼロにするまでに時間がかかり、制御制動力P*が短時間に要求制動力Prefに一致することを抑制することができる。
【0066】
既述のとおり、過熱保護モード判定部25が過熱保護モードと判定すると、過熱保護モードフラグflgが「1」にセットされる。すると、マイクロコンピュータ2Mは、図8のステップS253で、フィードバック制御ゲインを低下させる。フィードバック制御ゲインは、比例ゲインKP、積分ゲインKI及び微分ゲインKDのうち、少なくともひとつの制御ゲインを低下させることができる。複数のフィードバック制御ゲインを低下させる場合は、通常制御ゲインに対して同じ割合で制御ゲインを減少させても良いし、それぞれ異なる割合で制御ゲインを減少させても良い。フィードバック制御ゲインを減少させる方法は、特に限定されないが、例えば、マイクロコンピュータ2Mが図8に示すルーチンを実行する毎に、制御ゲインから所定量を減算することによって、フィードバック制御ゲインを減少させることができる。フィードバック制御の安定性を確保するためには、各制御ゲインの下限値を設けておくのが良い。これらの具体的なパラメータ値は、実験的に求めても良いし、例えば、既知の計算機シミュレーションによって求めることもできる。シミュレーションモデルは図6に示すブロック線図から容易に作成することができる。
【0067】
図9は、過熱保護モード中の電動ブレーキ装置の実制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は実制動力を(B)はモータ電流を示している。過熱保護モード中に、フィードバック制御ゲインを低下させた場合の実制動力Pを実線261で示し、モータ電流Iを実線262で示す。なお、フィードバック制御ゲインは、すべてのフィードバック制御ゲインを通常制御ゲインに対してそれぞれ同じ割合で低下させている。また、比較例として、フィードバック制御ゲインを通常制御ゲインのままにした場合の実制動力Pを破線263で示し、モータ電流Iを破線264で示す。
【0068】
図9に示すように、過熱保護モード中に、フィードバック制御ゲインを低下させた場合でも実制動力Pは、目標制動力に到達している。また、モータ電流Iは、モータ慣性による遅れを補償するため、同図(B)に示すような電流波形になるが、過熱保護モード中に、フィードバック制御ゲインを低下させた場合、モータ電流Iの変動幅は、フィードバック制御ゲインを通常制御ゲインのままにした場合のモータ電流Iの変動幅と比べて小さくなっている。つまり、過熱保護モード中に、フィードバック制御ゲインを低下させることにより、フィードバック制御の応答が緩やかになり、モータ電流Iの電流変動量を抑制することができる。また、ノイズ等による電流変動も低減することができる。その結果、モータ電流Iの2乗に比例する発熱を低減することができる。
【0069】
(2)第2実施形態
第2実施形態の電動ブレーキ装置は、第1実施形態の電動ブレーキ装置と基本的には同様の構成、作用効果を有する。共通する部位には共通の符号を付し、異なる部分を中心に説明する。本実施形態では、アンチロック制御中に電動モータ11の過熱保護が必要となったときに、電動ブレーキアクチュエータ部10が加圧中は、電流変動量抑制補正部26がフィードバック制御ゲインを低下させ、電動ブレーキアクチュエータ部10が減圧中は、電流変動量抑制補正部26がフィードバック制御ゲインを通常制御ゲインにすることに特徴がある。本実施形態は、第1実施形態と比べて、過熱保護モード判定部25及び電流変動量抑制補正部26の制御フローが異なる。
【0070】
路面が濡れている場合にはタイヤと路面との間の摩擦係数が小さくなり、ブレーキによる制動トルクが必要以上に大きくなる。その結果、タイヤがロックされて車両は路面上をスリップする。これを防止する方法として、アンチロック制御(ABS制御)が知られている。アンチロック制御は、車輪が滑りはじめたら制動力を抑えてタイヤのロック状態を解消し、ロック状態が解消されたら制動力を大きくする。これを繰り返すことにより、タイヤがロックされた状態を短くすることができ、車両が路面上をスリップすることを抑えることができる。既述のとおり、図2に示す電動ブレーキアクチュエータ部10の場合、電動モータ11の回転方向を変えることにより、制動力を増減させることができる。アンチロック制御自体は広く知られているので、本明細書ではこれ以上の説明は省略する。以下、アンチロック制御中における過熱保護モードへの移行判定及びフィードバック制御ゲインについて説明する。
【0071】
図10は、本実施形態における過熱保護モードへの移行可否を判定するフローチャートであり、図8に示すフローチャートの代わりに実行される。図10は、図4に示すステップS25及びステップS26の具体的な処理を示すものである。なお、図10では、アンチロック制御中でない場合のフローチャートも併せて記載している。以下、説明の便宜上、左後輪RLについてのみ説明するが、マイクロコンピュータ2Mは、右後輪RR並びに左右前輪FL及びFRについても、左後輪RLと同様に、制御周期毎に図10に示すフローチャートを実行する。
【0072】
マイクロコンピュータ2Mは、ステップS610において、電動ブレーキ装置がアンチロック制御中であるか否かを判定する。車輪がロックされているか否かの判断は、既知の方法を用いることができ、特に限定されない。例えば、車速センサ41の検出値SPDと車輪速センサ46cの検出値VRLとからスリップ率Sを求め、スリップ率Sが所定値以上であるとき、車輪RLがロック状態にあると判定することができる。スリップ率Sは、下記数3で表すことができる。
(数3)
S=(SPD−VRL)/SPD
【0073】
電動ブレーキ装置がアンチロック制御中である場合は、ステップS610において、「YES」と判定して、ステップS611に進む。次に、ステップS611において、モータ温度検出部15の検出結果であるモータ温度Tが閾値Aより大きいか否かを判定する。第1実施形態と同様に、モータ温度Tの検出は、既述の温度センサ及び/又はモータ電流センサ45を用いることができる。モータ温度Tが閾値A以上の場合は、マイクロコンピュータ2Mは、ステップS611において、「YES」と判定して、ステップS612に進み、過熱保護モードフラグflgを「1」にセットする。
【0074】
次に、マイクロコンピュータ2Mは、ステップS613に進み、電動ブレーキアクチュエータ部10が加圧中であるか否かを判定する。電動ブレーキアクチュエータ部10が加圧中である場合は、ステップS613において、「YES」と判定して、ステップS614に進む。そして、ステップS614において、フィードバック制御ゲインを低下させて、一旦本ルーチンを終了する。フィードバック制御ゲインを低下させる方法は、第1実施形態と同様である。なお、電動ブレーキアクチュエータ部10が減圧中である場合は、ステップS613において、「No」と判定して、ステップS616に進む。そして、ステップS616において、フィードバック制御ゲインを通常制御ゲインにセットして、一旦本ルーチンを終了する。
【0075】
本実施形態では、電動ブレーキアクチュエータ部10が減圧中はフィードバック制御ゲインを通常制御ゲインにしている。既述のとおり、アンチロック制御では、車輪が滑りはじめたら制動力を抑えてタイヤのロック状態を解消する。そのため、電動ブレーキアクチュエータ部10が減圧中は、制動トルクを急減させる必要がある。本実施形態では、フィードバック制御ゲインを通常制御ゲインにすることにより、フィードバック制御の応答性を確保している。
【0076】
図11は、本実施形態に係る電動ブレーキ装置の要求制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は要求制動力を(B)はモータ電流を示している。
【0077】
図11(A)では、要求制動力Prefを曲線61で示している。同図は、アンチロック制御中において車輪のロック状態を解消するために、要求制動力Prefを増減させていることを示している。同図(B)では、アンチロック制御中において過熱保護モードとなり、電動ブレーキアクチュエータ部10が加圧中(電動モータ11は正転)にフィードバック制御ゲインを低下させた場合のモータ電流Iを実線62で示している。なお、フィードバック制御ゲインは、すべてのフィードバック制御ゲインを通常制御ゲインに対してそれぞれ同じ割合で低下させている。また、比較例として、フィードバック制御ゲインを低下させないで通常制御ゲインのままにした場合(通常モード)のモータ電流Iを破線63で示している。
【0078】
アンチロック制御中において、電動ブレーキアクチュエータ部10が加圧中にフィードバック制御ゲインを低下させた場合は、フィードバック制御ゲインが通常制御ゲインのままの場合と比べて、加圧中はフィードバック制御の応答が緩やかになり、モータ電流Iの電流変動を抑制することができる。
【0079】
次に、アンチロック制御中に電動モータ11の過熱保護が必要でない場合について簡単に説明する。電動ブレーキ装置がアンチロック制御中であるので、マイクロコンピュータ2Mは、図10のステップS610において、「YES」と判定して、ステップS611に進む。電動モータ11の過熱保護が必要でない場合は、モータ温度Tが閾値Aより小さいので、マイクロコンピュータ2Mは、ステップS611において、「No」と判定して、ステップS615に進み、過熱保護モードフラグflgを「0」にセットする。そして、ステップS616に進み、フィードバック制御ゲインを通常制御ゲインにセットして、一旦本ルーチンを終了する。
【0080】
なお、電動ブレーキ装置がアンチロック制御中でない場合、過熱保護モードへの移行判定及びフィードバック制御ゲインの変更方法は、第1実施形態と同じである。図10においては、共通するステップに図8と同じ符号を付して、その説明を省略する。
【0081】
(変形形態1)
モータ電流Iが遮断されたときにブレーキパッド108、110をディスクロータ102から離間させる機構(以下、「ディスクロータ離間機構」という。)を電動ブレーキアクチュエータ部10が備えている場合は、以下の形態も取り得る。ディスクロータ離間機構は、例えば、特許文献1に示すようなコイルばねの弾性復元力を用いた構成とすることができる。
【0082】
既述のとおり、アンチロック制御中に電動モータ11の過熱保護が必要となったとき、電動ブレーキアクチュエータ部10が減圧中は、フィードバック制御ゲインを通常制御ゲインにしている。この際、電動モータ11のモータ電流Iを遮断することによって、電動ブレーキアクチュエータ部10が減圧することもできる。例えば、駆動信号演算部24が電動モータ11のモータ電流Iを遮断する駆動信号を生成することによって、モータ電流Iを遮断することができる。駆動信号は、例えば、PWM制御におけるパルスのON幅をゼロとした信号が挙げられる。モータ電流Iが遮断されると、ディスクロータ離間機構が働き、実加圧力(実制動力)Pを低下させることができる。電動ブレーキアクチュエータ部10の減圧中に電動モータ11に電流が流れないので、電動モータ11の過熱を抑えることができる。
【0083】
(変形形態2)
図12は、変形形態2に係る電動ブレーキ装置の要求制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は要求制動力を(B)はモータ電流を示している。具体的には、要求制動力Prefを曲線64で示し、モータ電流Iを実線65で示している。
【0084】
同図(A)に示されるように、変形形態2に係るアンチロック制御は、要求制動力Prefが急激に増加する急増モードと、要求制動力Prefが緩やかに増加する緩増モードと、を有しており、アンチロック制御中において、電動ブレーキアクチュエータ部10の加圧が2段階で行われる。
【0085】
急増モードで加圧中にフィードバック制御ゲインを低下させると、制動力の立ち上がりが遅れることが考えられる。そのため、本変形形態では、アンチロック制御中において、電動ブレーキアクチュエータ部10が減圧中又は急増モードで加圧中は、フィードバック制御ゲインを通常制御ゲインにする。そして、アンチロック制御中において、電動ブレーキアクチュエータ部10が緩増モードで加圧中は、フィードバック制御ゲインを低下させる。なお、比較例として、フィードバック制御ゲインを低下させないで通常制御ゲインのままにした場合(通常モード)のモータ電流Iを同図(B)において破線66で示す。
【0086】
このような制御を行うことにより、アンチロック制御の性能低下を極力抑えつつ、電動モータ11の過熱を抑制することができる。
【0087】
(3)第3実施形態
第3実施形態の電動ブレーキ装置は、第1実施形態の電動ブレーキ装置と基本的には同様の構成、作用効果を有する。共通する部位には共通の符号を付し、異なる部分を中心に説明する。本実施形態では、トラクション制御中に電動モータ11の過熱保護が必要となったときに、電動ブレーキアクチュエータ部10が減圧中は、電流変動量抑制補正部26がフィードバック制御ゲインを低下させ、電動ブレーキアクチュエータ部10が加圧中は、電流変動量抑制補正部26がフィードバック制御ゲインを通常制御ゲインにすることに特徴がある。本実施形態は、第1実施形態と比べて、過熱保護モード判定部25及び電流変動量抑制補正部26の制御フローが異なる。
【0088】
車両が発進、加速する際に車輪に大きな駆動力が加わると、車輪が空転することがある。車輪の空転を防止する方法として、トラクション制御(TRC制御)が知られている。トラクション制御は、車速と各車輪の車輪速度から車輪の空転を検知して、空転した車輪の駆動力を低減することにより、車輪の空転を解消する。また、トラクション制御では、空転した車輪の駆動力を低減するとともに、空転を起こしている車輪に制動力を加えて、空転の解消を補助することも行われている。トラクション制御自体は良く知られているので、本明細書ではこれ以上の説明は省略する。以下、トラクション制御中における過熱保護モードへの移行判定及びフィードバック制御ゲインについて説明する。
【0089】
図13は、本実施形態における過熱保護モードへの移行可否を判定するフローチャートであり、図8に示すフローチャートの代わりに実行される。図13は、図4に示すステップS25及びステップS26の具体的な処理を示すものである。なお、図13では、トラクション制御中でない場合のフローチャートも併せて記載している。マイクロコンピュータ2Mは、空転している車輪に対して、制御周期毎に図13に示すフローチャートを実行する。4輪FL、FR、RL、RRにそれぞれ設けられている車輪速センサ46a〜46dの検出値(車輪速度VFL、VFR、VRL、VRR)と車速センサ41の検出値SPDとを比較することにより、空転している車輪を簡単に検知することができ、空転している車輪に対して上記のトラクション制御を行う。
【0090】
マイクロコンピュータ2Mは、ステップS710において、電動ブレーキ装置がトラクション制御中であるか否かを判定する。電動ブレーキ装置がトラクション制御中である場合は、ステップS710において、「YES」と判定して、ステップS711に進む。次に、ステップS711において、モータ温度検出部15の検出結果であるモータ温度Tが閾値Aより大きいか否かを判定する。第1実施形態と同様に、モータ温度Tの検出は、既述の温度センサ及び/又はモータ電流センサ45を用いることができる。モータ温度Tが閾値A以上の場合は、マイクロコンピュータ2Mは、ステップS711において、「YES」と判定して、ステップS712に進み、過熱保護モードフラグflgを「1」にセットする。
【0091】
次に、マイクロコンピュータ2Mは、ステップS713に進み、電動ブレーキアクチュエータ部10が減圧中であるか否かを判定する。電動ブレーキアクチュエータ部10が減圧中である場合は、ステップS713において、「YES」と判定して、ステップS714に進む。そして、ステップS714において、フィードバック制御ゲインを低下させて、一旦本ルーチンを終了する。フィードバック制御ゲインを低下させる方法は、第1実施形態と同様である。なお、電動ブレーキアクチュエータ部10が加圧中は、ステップS713において、「No」と判定して、ステップS716に進む。そして、ステップS716において、フィードバック制御ゲインを通常制御ゲインにセットして、一旦本ルーチンを終了する。
【0092】
本実施形態では、電動ブレーキアクチュエータ部10が加圧中はフィードバック制御ゲインを通常制御ゲインにしている。既述のとおり、トラクション制御では、空転している車輪に制動力を加えて、空転の解消を補助する。そのため、電動ブレーキアクチュエータ部10が加圧中は、制動トルクを急増させる必要がある。本実施形態では、フィードバック制御ゲインを通常制御ゲインにすることにより、フィードバック制御の応答性を確保している。
【0093】
図14は、本実施形態に係る電動ブレーキ装置の要求制動力およびモータ電流の時間変化を模式的に示した概略図であり、(A)は要求制動力を(B)はモータ電流を示している。このとき、電動ブレーキ装置はトラクション制御中であり、モータ温度Tは閾値A以上で過熱保護モード中であるとする。
【0094】
図14(A)では、要求制動力Prefを曲線71で示している。同図は、空転している車輪に制動力を印加することを示している。同図(B)では、電動ブレーキアクチュエータ部10が減圧中(電動モータ11は逆転)にフィードバック制御ゲインを低下させた場合のモータ電流Iを実線72で示している。なお、フィードバック制御ゲインは、すべてのフィードバック制御ゲインを通常制御ゲインに対してそれぞれ同じ割合で低下させている。また、比較例として、フィードバック制御ゲインを低下させないで通常制御ゲインのままにした場合(通常モード)のモータ電流Iを破線73で示している。
【0095】
トラクション制御中において、電動ブレーキアクチュエータ部10が減圧中にフィードバック制御ゲインを低下させた場合は、フィードバック制御ゲインが通常制御ゲインのままの場合と比べて、減圧中はフィードバック制御の応答が緩やかになり、モータ電流Iの電流変動を抑制することができる。
【0096】
本節の最後に、トラクション制御中に電動モータ11の過熱保護が必要でない場合について簡単に説明する。電動ブレーキ装置はトラクション制御中であるので、マイクロコンピュータ2Mは、図13のステップS710において、「YES」と判定して、ステップS711に進む。電動モータ11の過熱保護が必要でない場合は、モータ温度Tが閾値Aより小さいので、マイクロコンピュータ2Mは、ステップS711において、「No」と判定して、ステップS715に進み、過熱保護モードフラグflgを「0」にセットする。そして、ステップS716に進み、フィードバック制御ゲインを通常制御ゲインにセットして、一旦本ルーチンを終了する。
【0097】
なお、電動ブレーキ装置がトラクション制御中でない場合、過熱保護モードへの移行判定及びフィードバック制御ゲインの変更方法は、第1実施形態と同じである。図13おいては、共通するステップに図8と同じ符号を付して、その説明を省略する。
【0098】
(変形形態)
第1実施形態〜第3実施形態を組み合わせた実施形態とすることもできる。本変形形態によれば、アンチロック制御及びトラクション制御のいずれにも対応した過熱保護モードへの移行判定及びフィードバック制御ゲインの変更を行うことができる。具体的には、まず、アンチロック制御中か否かを図10に示すフローチャートに従って判定し、アンチロック制御中である場合は、過熱保護モードへの移行判定及びフィードバック制御ゲインの変更を行う。アンチロック制御中でない場合は、トラクション制御中か否かを図13に示すフローチャートに従って判定し、トラクション制御中である場合は、過熱保護モードへの移行判定及びフィードバック制御ゲインの変更を行う。アンチロック制御中でもトラクション制御中でもない場合は、図8に示すフローチャートに従って、過熱保護モードへの移行判定及びフィードバック制御ゲインの変更を行う。なお、トラクション制御の判定処理を先に行い、その後にアンチロック制御の判定処理を行うこともできる。
【0099】
(4)第4実施形態
第4実施形態の電動ブレーキ装置は、第1実施形態〜第3実施形態の電動ブレーキ装置と基本的には同様の構成、作用効果を有する。共通する部位には共通の符号を付し、異なる部分を中心に説明する。本実施形態では、過熱保護モード時に、要求制動力演算部22が要求制動力に勾配制限を設けることに特徴がある。本実施形態は、第1実施形態〜第3実施形態と比べて、要求制動力演算部22が異なる。
【0100】
既述のとおり、第1実施形態では、要求制動力演算部22が図4のステップS22で要求制動力演算を行う毎に、要求制動力演算部22が踏力F及び/又は操作ストロークSTから要求制動力Prefを演算する。しかしながら、短時間に踏力F及び/又は操作ストロークSTが増加する場合は、それに合わせて要求制動力Prefも変化するため、モータ電流Iがオーバーシュート又はアンダーシュートする可能性がある。特に、過熱保護モード時にモータ電流Iがオーバーシュート又はアンダーシュートすると、モータ温度Tのさらなる上昇を招くことになる。
【0101】
そこで、本実施形態では、過熱保護モード時に、要求制動力演算部22が要求制動力Prefに勾配制限を設ける。具体的には、過熱保護モード時(過熱保護モードフラグflgが「1」のとき)に、制動力演算部22の演算結果Pref1から前回の演算結果Pref0を減算して偏差Peを求める。偏差Peが所定値B(正の数)より大きい場合は、要求制動力Prefは、前回の演算結果Pref0に所定値Bを加算したものを使用する。偏差Peが所定値B(正の数)以下の場合は、要求制動力Prefは、演算結果Pref1を使用する。所定値Bは、例えば、既知の計算機シミュレーションによって求めることができる。シミュレーションモデルは図6に示すブロック線図から容易に作成することができる。本実施形態では、過熱保護モード時に要求制動力Prefが急増することを防止することができ、モータ温度Tの上昇を抑えることができる。
【0102】
(変形形態)
過熱保護モード時に、要求制動力演算部22が要求制動力Prefにフィルタを掛けることもできる。フィルタは、アナログフィルタであってもデジタルフィルタであっても良いが、過熱保護モード時のみフィルタを掛けることを考慮すると、デジタルフィルタが好ましい。また、フィルタは、ローパスフィルタが好ましい。ローパスフィルタは、踏力F及び/又は操作ストロークSTを入力信号とした場合に、入力信号のうちカットオフ周波数よりも低い周波数帯域の入力信号のみを通過させる。そのため、入力信号がステップ状に変化した場合であっても、出力信号は緩やかに入力信号に追従することができる。したがって、要求制動力Prefに勾配制限を設けた場合と同様の効果が得られる。つまり、過熱保護モード時に要求制動力Prefが急増することを防止することができ、モータ温度Tの上昇を抑えることができる。なお、要求制動力Prefに勾配制限を設けるとともに、フィルタを掛けることもできる。
【0103】
ローパスフィルタの構成は、特に限定されない。アナログフィルタの場合は、例えば、抵抗器及びコンデンサを用いた既知のローパスフィルタを使用することができる。デジタルフィルタの場合は、例えば、FIRフィルタを使用することができる。FIRフィルタは、過去の入力信号の移動平均を算出することによって、簡単にローパスフィルタを実現できる。カットオフ周波数は、要求制動力Prefに勾配制限を設けた場合と同様に、既知の計算機シミュレーションによって求めることができる。
【0104】
(5)その他
本発明は上記し且つ図面に示した実施形態のみに限定されるものではなく、要旨を逸脱しない範囲内で適宜変更して実施可能である。例えば、本発明は、電動ブレーキアクチュエータ部10を4輪全てに適用する場合だけでなく、電動ブレーキアクチュエータ部10を前輪のみ又は後輪のみに適用することもできる。
【符号の説明】
【0105】
10:電動ブレーキアクチュエータ部
11:電動モータ 13:制動力検出部 15:モータ温度検出部
20:電気制御部
22:要求制動力演算部 23:フィードバック制御演算部
24:駆動信号演算部 25:過熱保護モード判定部
26:電流変動量抑制補正部
30:駆動回路部
50:ペダル操作部
【特許請求の範囲】
【請求項1】
車輪と一体に回転する被制動部材に摩擦材を電動モータにより押圧して制動力を発生させる電動ブレーキアクチュエータ部と、
運転者によるブレーキ操作を検出するペダル操作部と、
前記ペダル操作部により検出されたブレーキ操作量から要求制動力を演算して前記電動モータの駆動信号を生成する電気制御部と、
前記駆動信号に基づいて前記電動ブレーキアクチュエータ部を駆動させる駆動回路部と、
を備える電動ブレーキ装置において、
前記電動ブレーキアクチュエータ部は、前記車輪に生じる実制動力を検出する制動力検出部と、前記電動モータのモータ温度を検出するモータ温度検出部と、を有し、
前記電気制御部は、前記ブレーキ操作量に基づいて前記要求制動力を演算する要求制動力演算部と、前記要求制動力に前記実制動力をフィードバックして制御制動力を演算するフィードバック制御演算部と、前記制御制動力に基づいて前記電動モータの駆動信号を生成する駆動信号演算部と、前記モータ温度検出部の検出結果に基づいて前記電動モータの過熱を抑える過熱保護モードに移行するか否かを判定する過熱保護モード判定部と、前記過熱保護モード判定部が前記過熱保護モードと判定したときに前記電動モータへ供給する電流の電流変動量を抑制する電流変動量抑制補正部と、を有することを特徴とする電動ブレーキ装置。
【請求項2】
前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、フィードバック制御ゲインを低下させる請求項1に記載の電動ブレーキ装置。
【請求項3】
アンチロック制御中に前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、前記電動ブレーキアクチュエータ部が加圧中はフィードバック制御ゲインを低下させ、前記電動ブレーキアクチュエータ部が減圧中は前記フィードバック制御ゲインを通常制御ゲインにする請求項1又は2に記載の電動ブレーキ装置。
【請求項4】
前記駆動信号演算部は、前記減圧中に前記電動モータの電流を遮断する駆動信号を生成する請求項3に記載の電動ブレーキ装置。
【請求項5】
アンチロック制御は、前記要求制動力が急激に増加する急増モードと、前記急増モードと比較して前記要求制動力が緩やかに増加する緩増モードと、を有し、
前記アンチロック制御中に前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、前記電動ブレーキアクチュエータ部が前記緩増モードで加圧中はフィードバック制御ゲインを低下させ、前記電動ブレーキアクチュエータ部が減圧中又は前記急増モードで加圧中は前記フィードバック制御ゲインを通常制御ゲインにする請求項1又は2に記載の電動ブレーキ装置。
【請求項6】
トラクション制御中に前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、前記電動ブレーキアクチュエータ部が減圧中はフィードバック制御ゲインを低下させ、前記電動ブレーキアクチュエータ部が加圧中は前記フィードバック制御ゲインを通常制御ゲインにする請求項1〜5のいずれか1項に記載の電動ブレーキ装置。
【請求項7】
前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記要求制動力演算部は、前記要求制動力に勾配制限を設ける請求項1〜6のいずれか1項に記載の電動ブレーキ装置。
【請求項8】
前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記要求制動力演算部は、前記要求制動力にフィルタを掛ける請求項1〜7のいずれか1項に記載の電動ブレーキ装置。
【請求項1】
車輪と一体に回転する被制動部材に摩擦材を電動モータにより押圧して制動力を発生させる電動ブレーキアクチュエータ部と、
運転者によるブレーキ操作を検出するペダル操作部と、
前記ペダル操作部により検出されたブレーキ操作量から要求制動力を演算して前記電動モータの駆動信号を生成する電気制御部と、
前記駆動信号に基づいて前記電動ブレーキアクチュエータ部を駆動させる駆動回路部と、
を備える電動ブレーキ装置において、
前記電動ブレーキアクチュエータ部は、前記車輪に生じる実制動力を検出する制動力検出部と、前記電動モータのモータ温度を検出するモータ温度検出部と、を有し、
前記電気制御部は、前記ブレーキ操作量に基づいて前記要求制動力を演算する要求制動力演算部と、前記要求制動力に前記実制動力をフィードバックして制御制動力を演算するフィードバック制御演算部と、前記制御制動力に基づいて前記電動モータの駆動信号を生成する駆動信号演算部と、前記モータ温度検出部の検出結果に基づいて前記電動モータの過熱を抑える過熱保護モードに移行するか否かを判定する過熱保護モード判定部と、前記過熱保護モード判定部が前記過熱保護モードと判定したときに前記電動モータへ供給する電流の電流変動量を抑制する電流変動量抑制補正部と、を有することを特徴とする電動ブレーキ装置。
【請求項2】
前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、フィードバック制御ゲインを低下させる請求項1に記載の電動ブレーキ装置。
【請求項3】
アンチロック制御中に前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、前記電動ブレーキアクチュエータ部が加圧中はフィードバック制御ゲインを低下させ、前記電動ブレーキアクチュエータ部が減圧中は前記フィードバック制御ゲインを通常制御ゲインにする請求項1又は2に記載の電動ブレーキ装置。
【請求項4】
前記駆動信号演算部は、前記減圧中に前記電動モータの電流を遮断する駆動信号を生成する請求項3に記載の電動ブレーキ装置。
【請求項5】
アンチロック制御は、前記要求制動力が急激に増加する急増モードと、前記急増モードと比較して前記要求制動力が緩やかに増加する緩増モードと、を有し、
前記アンチロック制御中に前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、前記電動ブレーキアクチュエータ部が前記緩増モードで加圧中はフィードバック制御ゲインを低下させ、前記電動ブレーキアクチュエータ部が減圧中又は前記急増モードで加圧中は前記フィードバック制御ゲインを通常制御ゲインにする請求項1又は2に記載の電動ブレーキ装置。
【請求項6】
トラクション制御中に前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記電流変動量抑制補正部は、前記電動ブレーキアクチュエータ部が減圧中はフィードバック制御ゲインを低下させ、前記電動ブレーキアクチュエータ部が加圧中は前記フィードバック制御ゲインを通常制御ゲインにする請求項1〜5のいずれか1項に記載の電動ブレーキ装置。
【請求項7】
前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記要求制動力演算部は、前記要求制動力に勾配制限を設ける請求項1〜6のいずれか1項に記載の電動ブレーキ装置。
【請求項8】
前記過熱保護モード判定部が前記過熱保護モードと判定したときに、前記要求制動力演算部は、前記要求制動力にフィルタを掛ける請求項1〜7のいずれか1項に記載の電動ブレーキ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−201315(P2012−201315A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−69837(P2011−69837)
【出願日】平成23年3月28日(2011.3.28)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月28日(2011.3.28)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]