
電動式パワーステアリング制御装置
【課題】運転者が感じている操舵感覚に応じた的確な補助力を供給して、操舵フィーリングを良好にすることが出来る電動式パワーステアリング制御装置を提供する。
【解決手段】ステアリングの操舵トルクTに基づいて微分指令値T1を算出し、操舵トルクTと車速Vに基づいて微分ゲインgと第1電流指令値I1とを算出し、車速Vとモータの回転速度REとに基づいて収斂値ASを算出し、操舵トルクTと角速度AVに基づいてゲインGを算出し、微分指令値T1と微分ゲインgとに基づいて第2電流指令値I2を算出し、収斂値ASとゲインGとに基づいて収斂指令値asを算出し、第1電流指令値I1と第2電流指令値I2とに基づいて第3電流指令値I3を算出し、第3電流指令値I3と収斂指令値asとに基づいて駆動電流指令値Idを算出し、当該駆動電流指令値Idに基づいてモータを駆動する。
【解決手段】ステアリングの操舵トルクTに基づいて微分指令値T1を算出し、操舵トルクTと車速Vに基づいて微分ゲインgと第1電流指令値I1とを算出し、車速Vとモータの回転速度REとに基づいて収斂値ASを算出し、操舵トルクTと角速度AVに基づいてゲインGを算出し、微分指令値T1と微分ゲインgとに基づいて第2電流指令値I2を算出し、収斂値ASとゲインGとに基づいて収斂指令値asを算出し、第1電流指令値I1と第2電流指令値I2とに基づいて第3電流指令値I3を算出し、第3電流指令値I3と収斂指令値asとに基づいて駆動電流指令値Idを算出し、当該駆動電流指令値Idに基づいてモータを駆動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動式パワーステアリングシステムに用いられる電動式パワーステアリング制御装置に関するものである。
【背景技術】
【0002】
電動式パワーステアリングシステムは、例えば、自動車において、操舵機構を構成するステアリングの操舵時に電動モータにより補助力を与えることにより、運転者のステアリング操舵を補助するシステムである。このシステムにより、運転者は軽い力でステアリングを操舵することが出来る。
【0003】
このような電動式パワーステアリングシステムにおいて、ステアリングの操舵フィーリングを良好にするために、特許文献1では、操舵角センサからの出力に基づく操舵角に応じた操舵角速度データと、車速センサからの出力に基づく車速データとを、所定時間内に所定回数記憶し、記憶した当該データの内、上限および下限を削除した後、残りのデータに基づいて、平均速度および平均操舵角速度を算出する。この、算出した平均速度および平均操舵角速度と、予め記憶されている標準操舵パターンとを比較することにより、運転者の特性を判断する。そして、当該判断に基づいて、標準アシストパターンを有するコントローラにより電動モータを制御して、アシスト力を発揮させている。
【0004】
また、特許文献2では、操舵トルクと車速とに基づいて操舵補助指令値を演算し、操舵補助指令値とモータの電流値とから電流制御値を演算し、モータの出力電流と端子間電圧とからモータの角速度(舵角速度)を推定し、モータの角速度に応じた所定のゲインで該角速度を定数倍して収斂性信号(収斂制御値)としている。そして、モータの角速度と出力電流とからステアリングの操舵状態を検出し、モータの角速度が所定値以上でかつ出力電流が所定値以上の場合に上記ゲインを切り替え、電流制御値から収斂性信号を減算して得られた指令値により、モータを駆動している。
【0005】
特許文献3では、ステアリングホイールの操舵トルクを検出するトルクセンサの出力と車速を検出する車速センサの出力とによりアシスト電流値を決定するとともに、トルクセンサの出力と車速により決められた微分ゲインであって、所定に操舵トルクの範囲において、車速が0である場合は中立時に小さく、操舵トルクが増加するにつれて大となる微分ゲインに、トルクセンサの出力の微分量を掛け合わせて微分指令値を決定する。そして、アシスト電流値に微分指令値を足すことで、アシストモータを駆動して、操舵トルクにアシストトルクを付加している。
【0006】
特許文献4では、運転者が感じている操作感を的確に認識するために、ステアリング装置に対して加えられているトルクセンサ値を横軸とし、アシストモータの回転数値を縦軸とする2次元グラフに、各感性指標の領域としての感性領域を設定し、当該感性領域が設定された感性識別マップを車速値毎に設けて記憶部に記憶する。そして、入力される車速値、トルクセンサ値および回転数値に基づいて、感性識別マップを参照することにより、各時点において運転者が感じている操舵感を示す感性指標を出力する。
【0007】
【特許文献1】特許第3222506号公報
【特許文献2】特許第3637714号公報
【特許文献3】特許第3809594号公報
【特許文献4】特開2007−276708号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、電動式パワーステアリングシステムでは、予め設定されている制御プログラムに従って電動モータが回転し、当該電動モータの回転力によって、ステアリングに補助力が供給される。しかしながら、現状では、運転者が感じている操舵感覚と合致するような補助力を供給することが出来る制御プログラムが十分に実現されていないため、運転者が操舵に違和感を覚えやすく、操舵フィーリングが悪くなる恐れがある。
【0009】
本発明は、上述した問題点に鑑み、運転者が感じている操舵感覚に応じた的確な補助力を供給して、操舵フィーリングを良好にすることが出来る電動式パワーステアリング制御装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
本発明に係る電動式パワーステアリング制御装置は、車両が有する操舵機構の操舵トルクを入力する操舵トルク入力手段と、操舵機構の回転角速度を入力する角速度入力手段と、車両の車速を入力する車速入力手段と、操舵機構に補助力を与えるモータの回転速度を入力する回転速度入力手段と、操舵トルク入力手段と角速度入力手段と車速入力手段と回転速度入力手段とからの入力に基づいて、モータを駆動するための駆動電流指令値を出力する駆動電流指令値出力手段とを備えており、駆動電流指令値出力手段は、操舵トルクを微分して微分指令値を算出する微分指令値算出手段と、操舵トルクと車速とに基づいて微分指令値に対するゲインである微分ゲインを算出する微分ゲイン算出手段と、操舵トルクと車速とに基づいて第1電流指令値を算出する第1電流指令値算出手段と、車速と回転速度とに基づいて収斂値を算出する収斂値算出手段と、操舵トルクと回転角速度とに基づいて操舵機構の操舵感覚を判定し、当該判定結果に基づいて収斂値に対するゲインである収斂ゲインを算出する収斂ゲイン算出手段と、微分指令値と微分ゲインとを乗算して第2電流指令値を算出する第2電流指令値算出手段と、収斂値と収斂ゲインとを乗算して収斂指令値を算出する収斂指令値算出手段と、第1電流指令値と第2電流指令値とを加算して第3電流指令値を算出する第3電流指令値算出手段と、第3電流指令値から収斂指令値を減算して駆動電流指令値を算出する駆動電流指令値算出手段とを有している。
【0011】
このようにすることで、操舵トルクと車速に応じてアシスト電流値と微分指令値のみを変化させる従来技術とは異なり、モータを駆動するための駆動電流指令値をきめ細かく制御して、その調整精度を上げることが出来るため、モータの駆動力も従来技術に比べて微調整可能となる。これにより、操舵手が感じている操舵感覚に応じた的確な補助力(モータの駆動力)の供給が可能となるため、操舵フィーリングを良好にすることが出来る。
【0012】
本発明の電動式パワーステアリング制御装置において、収斂ゲイン算出手段は、操舵トルクと回転角速度とに基づいて分類された複数の操舵感覚の中から、各操舵トルクおよび回転角速度に対応する操舵感覚を判定する第1判定手段と、第1判定手段による判定結果に基づいて当該判定結果に対応する収斂ゲインを決定する収斂ゲイン決定手段とを有してもよい。
【0013】
このようにすることで、モータの回転数に対応付けて操舵感覚を判定する従来技術とは異なり、操舵感覚の判定にモータの回転数を用いないため、車両毎に異なる回転数に合わせて、操舵感覚判定のためのチューニングを行う必要が無い。このため、複雑なチューニングが不要となって、コストの削減を図ることが出来る。また、従来において行っていた操舵手による操舵感覚の調整値の入力も行う必要が無いため、当該調整値入力の手間を省略することが出来る。
【0014】
本発明の電動式パワーステアリング制御装置において、第1判定手段は、操舵トルクおよび回転角速度に対応する操舵感覚が複数ある場合は、予め決められた優先順位に従って、当該複数の操舵感覚の内のいずれかの操舵感覚を判定結果としてもよい。
【0015】
このようにすることで、操舵トルクおよび回転角速度に対応する操舵感覚が複数ある場合においても、優先順位に従っていずれかの操舵感覚を、第1判定手段による判定結果とすることが出来るため、当該判定におけるシステムエラーなどを抑制することが出来る。
【0016】
本発明の電動式パワーステアリング制御装置において、収斂ゲイン算出手段は、操舵トルクと微分指令値と車速とに基づいて、操舵機構の操舵感覚が、特定の操舵感覚に該当するか否かを判定する第2判定手段を有していてもよい。そして、第2判定手段による判定結果が該当有の場合は、第1判定手段によって判定された操舵感覚が複数あるか否かを検証し、当該操舵感覚が複数ある場合は、第2判定手段による特定の操舵感覚が、第1判定手段による複数の操舵感覚のいずれかと一致するか否かを検証し、一致する操舵感覚がある場合は、当該一致する操舵感覚を操舵機構の操舵感覚として判定してもよい。
【0017】
このようにすることで、第1判定手段による判定結果と第2判定手段による判定結果に基づいて、操舵感覚を最終的に判定するため、操舵手が感じている操舵感覚をより的確に特定することが出来る。これにより、操舵手が感じる操舵フィーリングの違和感を更に低減することができ、以って、操舵フィーリングをより良好にすることが出来る。
【0018】
本発明の電動式パワーステアリング制御装置において、電流ゲイン算出手段は、第1判定手段での判定結果である第1判定結果と、第1判定結果に続く判定結果である第2判定結果とが異ならない場合は、第2判定結果に基づいて操舵機構の操舵感覚を判定し、第1判定結果と第2判定結果とが異なる場合であり、かつ、第2判定結果と同じ判定結果が、当該第2判定結果以降、連続して所定回数得られていない場合は、第1判定結果に基づいて操舵機構の操舵感覚を判定し、第1判定結果と第2判定結果とが異なる場合であり、かつ、第2判定結果と同じ判定結果が、当該第2判定結果以降、連続して所定回数得られた場合は、第2判定結果に基づいて操舵機構の操舵感覚を判定してもよい。
【0019】
このようにすることで、第1判定手段による判定結果が頻繁に変わる場合においても、当該判定結果に基づいて操舵感覚が頻繁に変更されることを抑制することが出来る。これにより、操舵手が感じる操舵フィーリングの違和感を更に低減することができ、以って、操舵フィーリングをより良好にすることが出来る。
【0020】
本発明の電動式パワーステアリング制御装置において、収斂ゲイン算出手段と収斂指令値算出手段との間に、当該収斂ゲイン算出手段から出力されるゲインの変化を滑らかにするフィルタ手段を設けてもよい。
【0021】
このようにすることで、操舵感覚の変更に基づくゲインの急激な変化を抑制することが出来る。これにより、モータを駆動するための駆動電流指令値の急激な変化を抑制することが出来るため、操舵感覚の切り替えの際に、操舵手が操舵フィーリングの違和感を感じないようにすることが出来る。
【発明の効果】
【0022】
本発明によれば、操舵トルクと、操舵機構の回転角速度と、車速と、操舵機構に補助力を与えるモータの回転パラメータと、操舵トルクと回転角速度とに基づいて判定した操舵機構の操舵感覚に基づいて、モータを駆動するための駆動電流指令値を算出するため、当該駆動電流指令値をきめ細かく制御して、その調整精度を上げることが出来る。これにより、操舵手が感じている操舵感覚に応じた的確な補助力(モータの駆動力)の供給が可能となるため、操舵フィーリングを良好にすることが出来る。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施形態につき、図面を参照しながら説明する。
尚、図1〜図2,図8〜図9,図12〜図13において、同一部分または対応する部分には、同一符号を付してある。
【0024】
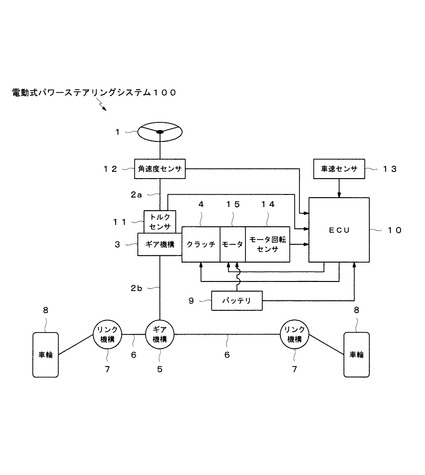
図1は、本発明の実施形態であり、後述する電動式パワーステアリング制御装置(例えば、図2)等から成る電動式パワーステアリングシステム100を示す図である。電動式パワーステアリングシステム100は、車両(例えば、自動車)に搭載される。
【0025】
図中の電動式パワーステアリングシステム100において、ステアリング1を操舵(回転操作)すると、その操舵力が、軸2aを介してギア機構3に伝達され、さらに、軸2bとギア機構5を介して軸6に伝達される。軸6は、当該操舵力によって駆動し、軸6が駆動することで、リンク機構7を介して車輪8の向きが変わる。
【0026】
また、モータ15が回転すると、その駆動力が、クラッチ4を介してギア機構3に伝達され、さらに、軸2bとギア機構5を介して軸6に伝達される。これにより、軸6には、ステアリング1の操舵により伝達された操舵力に加えて、モータ15の駆動力も伝達されるため、当該駆動力によって、軸6の駆動と車輪8の転向が補助される。即ち、ステアリング1での操舵が、モータ15により補助される。尚、本実施形態におけるモータ15は、例えば、ブラシモータから成る。
【0027】
トルクセンサ11は、ステアリング1により加えられる操舵トルクを検出する。 角速度センサ12は、ステアリング1の角速度(回転操作速度)を検出する。車速センサ13は、車両の車速(走行速度)を検出する。モータ回転センサ14は、モータ15の回転速度を検出する。ここで、回転速度に代えて、単位時間当たりの回転数を用いることも出来るが、回転速度が分かれば回転数も自ずと分かるので、回転速度を検出することは、回転数を検出することと実質的に同じである。よって、本発明における回転速度は、回転数も含む概念である。尚、トルクセンサ11は、本発明における操舵トルク入力手段の一実施形態であり、角速度センサ12は、本発明における角速度入力手段の一実施形態であり、車速センサ13は、本発明における車速入力手段の一実施形態であり、モータ回転センサ14は、本発明における回転速度入力手段の一実施形態である。
【0028】
ECU(Electronic Control Unit)10は、クラッチ4をON(結合)/OFF(離脱)制御する。また、ECU10は、トルクセンサ11により検出した操舵トルク、角速度センサ12により検出した角速度、車速センサ13により検出した車速に基づいて、モータ15を駆動するための電流指令値を決定し、当該電流指令値に基づいてモータ15の駆動を制御する。尚、ECU10は、本発明における駆動電流指令値出力手段の一実施形態である。
【0029】
バッテリ9は、ECU10とモータ15に電力を供給する。尚、ECU10、トルクセンサ11、角速度センサ12、車速センサ13、モータ回転センサ14は、本発明に係る電動式パワーステアリング制御装置の一実施形態を構成する。
【0030】
図2、図9、図12〜図13は、ECU10の機能ブロックを示す図であり、各図中において一点鎖線で囲われている部分(但し、モータ駆動部51を除く)が、ECU10の内部においてプログラムにより実行される機能である。
【0031】
また、図2は、本実施形態の第1実施例におけるECU10の機能ブロックを示す図であり、以下同様に、図9は第2実施例、図12は第5実施例、図13は第6実施例を示す図である。尚、第3,第4実施例については、図示を省略する(詳細については後述する)。
【0032】
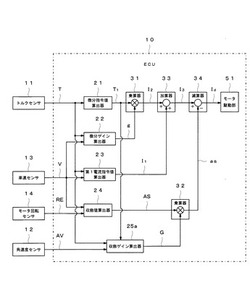
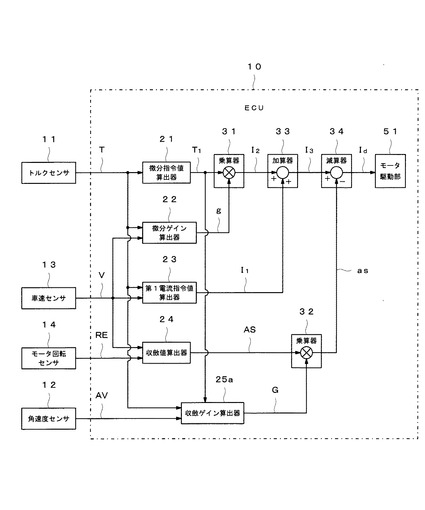
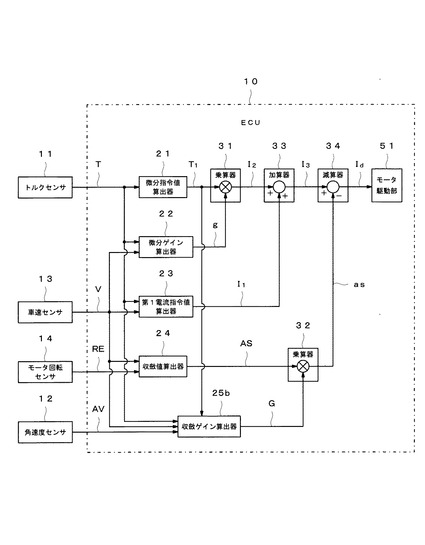
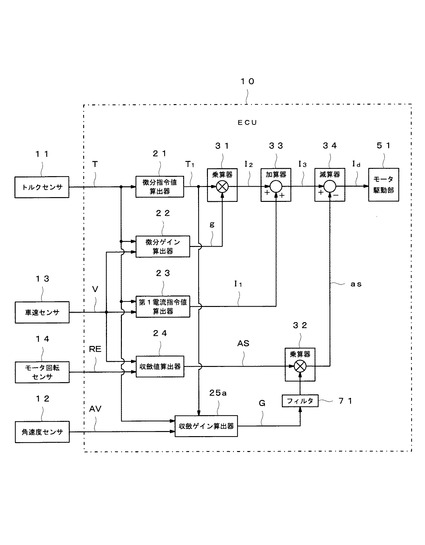
まず始めに、図2に示すECU10(第1実施例)について説明する。トルクセンサ11により検出されたステアリング1(図1)の操舵トルクTは、微分指令値算出器21、微分ゲイン算出器22、第1電流指令値算出器23、収斂ゲイン算出器25aに入力される。
【0033】
角速度センサ12により検出されたステアリング1の角速度AVは、収斂ゲイン算出器25aに入力される。車速センサ13により検出された車両の車速Vは、微分ゲイン算出器22、第1電流指令値算出器23、収斂値算出器24に入力される。モータ回転センサ14により検出されたモータ15の回転速度REは、収斂値算出器24に入力される。
【0034】
微分指令値算出器21は、操舵トルクTを時間に対して微分することにより、微分指令値T1を算出して、乗算器31に出力する。微分ゲイン算出器22は、操舵トルクTと車速Vとに基づいて、微分指令値T1に対するゲインである微分ゲインgを算出して、乗算器31に出力する。詳しくは微分ゲイン算出器22には、車速Vによって異なる3種類の微分ゲイン曲線(図3)が予め記憶されている。尚、微分指令値算出器21は、本発明における微分指令値算出手段の一実施形態を構成する。
【0035】
図3に示す微分ゲイン曲線において、車速VがV0(例えば、V0=0:車両停止時)である場合(実線)の微分ゲインgは、操舵トルクTの値に関わらず一定である。車速VがV1(例えば、V1=10:車両走行時)である場合(点線)の微分ゲインgは、操舵トルクTの値が大きくなるにつれて小さくなる。同様に、車速VがV2(例えば、V2=20:車両走行時)である場合(一点鎖線)の微分ゲインgは、操舵トルクTの値が大きくなるにつれて小さくなる。
【0036】
また、操舵トルクTの値に関わらず、車速VがV0である場合の微分ゲインgは、車速VがV1,V2である場合の微分ゲインgよりも常に大きく、車速VがV1である場合の微分ゲインgは、車速VがV2である場合の微分ゲインgよりも常に大きい。
【0037】
微分ゲイン算出器22は、車速Vに応じていずれかの微分ゲイン曲線を選択し、当該微分ゲイン曲線と操舵トルクTとから微分ゲインgを算出する。尚、微分ゲイン算出器22は、本発明における微分ゲイン算出手段の一実施形態を構成する。
【0038】
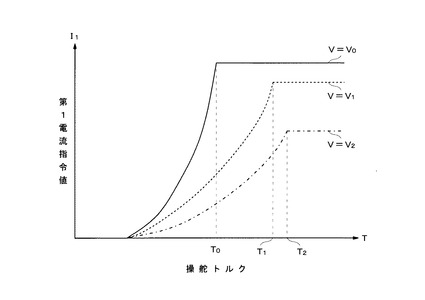
第1電流指令値算出器23(図2)は、操舵トルクTと車速Vとに基づいて、第1電流指令値I1を算出して、加算器33に出力する。詳しくは、第1電流指令値算出器23には、車速Vによって異なる3種類の第1電流指令値曲線(図4)が予め記憶されている。尚、第1電流指令値算出器23は、本発明における第1電流指令値算出手段の一実施形態を構成する。
【0039】
図4に示す第1電流指令値曲線において、車速VがV0(例えば、V0=0:車両停止時)である場合(実線)の第1電流指令値I1は、操舵トルクTが所定値T0となるまで増大し、当該所定値T0を超えると一定になる。以下同様に、車速VがV1(例えば、V1=10:車両走行時)である場合(点線)の第1電流指令値I1は、操舵トルクTが所定値T1となるまで増大し、当該所定値T1を超えると一定になる。車速VがV2(例えば、V2=20:車両走行時)である場合(一点鎖線)の第1電流指令値I1は、操舵トルクTが所定値T2となるまで増大し、当該所定値T2を超えると一定になる。尚、本実施例では、上述した各所定値T0、T1、T2の関係は、T0≦T1≦T2であり、また、T0>0としている。
【0040】
また、操舵トルクTの値に関わらず、車速VがV0である場合の第1電流指令値I1は、車速VがV1,V2である場合の第1電流指令値I1よりも常に大きく、車速VがV1である場合の第1電流指令値I1は、車速VがV2である場合の第1電流指令値I1よりも常に大きくなるようにしている。
【0041】
第1電流指令値算出器23は、車速Vに応じていずれかの第1電流指令値曲線を選択し、当該第1電流指令値曲線と操舵トルクTとから第1電流指令値I1を算出する。
【0042】
収斂値算出器24(図2)は、車速Vとモータ15の回転速度REに基づいて、収斂値ASを算出して、乗算器32に出力する。詳しくは、収斂値算出器24には、車速Vと当該車速Vに係る粘性(収斂強度)との関係を示す第1粘性値曲線(図5)と、モータ15の回転速度REと当該回転速度REに係る粘性(収斂強度)との関係を示す第2粘性値曲線(図6)とが予め記憶されている。尚、収斂値算出器24は、本発明における収斂値算出手段の一実施形態を構成する。
【0043】
図5に示す第1粘性値曲線において、第1粘性値Kxは、車速Vが0の場合は、値が0より大きな所定値K0であり、車速Vが所定値V0となるまで一旦減少する。そして、車速Vが所定値V0を超えると、所定値V1となるまで当該所定値V0時の所定値であるK1のまま一定になり、車速Vが所定値V1を超えると、所定値V2となるまで再び増加する。車速Vが所定値V2を超えると、当該所定値V2時の所定値であるK2のまま再び一定になる。尚、上述した車速Vの所定値V0、V1、V2の関係は、V0<V1<V2であり、V0>0である。また、上述した第1粘性値Kxの所定値K0、K1、K2の関係は、K1<K0≦K2であり、K1>0である。
【0044】
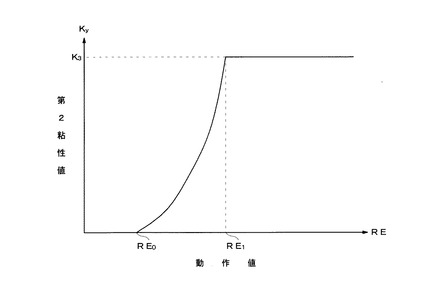
図6に示す第2粘性値曲線において、第2粘性値Kyは、モータ15の回転速度REが0から所定値RE0となるまではKy=0であり、所定値RE0から所定値RE1までは増大し、当該所定値RE0を超えると一定になる。ここで、回転速度REが、所定値RE0である場合の第2粘性値Kyは、K3である。尚、RE0>0であり、K3>0である。
【0045】
収斂値算出器24は、車速Vに基づいて、第1粘性値曲線(図5)より、第1粘性値Kxを算出(決定)し、モータ15の回転速度REに基づいて、第2粘性値曲線(図6)より、第2粘性値Kyを算出(決定)し、当該第1粘性値Kxと第2粘性値Kyを乗算して、収斂値ASを算出する。
【0046】
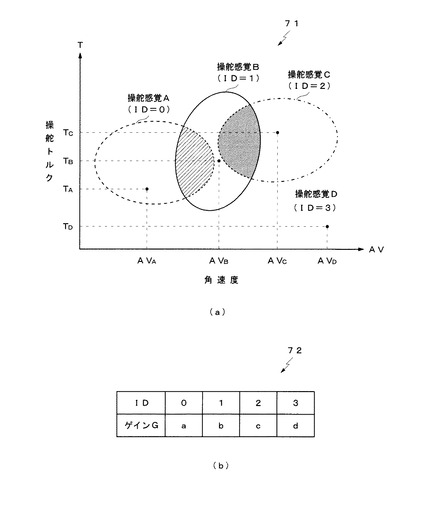
収斂ゲイン算出器25a(図2)は、収斂値ASに対するゲインであるゲインGを算出(決定)して、乗算器32に出力する。詳しくは、収斂ゲイン算出器25aには、操舵トルクTと角速度AVとに基づいて、運転者が感じる操舵感覚を分類した分類マップ71(図7の(a))と、当該分類マップ71での判定結果に係る識別子(以下、「ID」と記載)とゲイン値(ゲインG)とが対応付けられている対応表72(図5の(b))とが予め記憶されている。尚、収斂ゲイン算出器25aは、本発明に係る収斂ゲイン算出手段の一実施形態であり、分類マップ71は、本発明における第1判定手段の一実施形態であり、対応表72は、本発明におけるゲイン決定手段の一実施形態である。また、ゲインGは、本発明における収斂ゲインに対応している。
【0047】
図7の(a)に示す分類マップ71には、例えば、操舵感覚A(破線内の領域)と、操舵感覚B(実線内の領域)と、操舵感覚C(一点鎖線内の領域)と、操舵感覚A〜Cのいずれにも属さない操舵感覚Dの異なる4種類の操舵感覚が分布している。
【0048】
また、各操舵感覚(A〜D)には、上述したIDが予め設定されており、例えば、判定結果が操舵感覚Aである場合のIDは、ID=0である。以下同様に、判定結果が操舵感覚Bである場合のIDは、ID=1であり、操舵感覚Cである場合のIDは、ID=2であり、操舵感覚Dである場合のIDは、ID=3である。
【0049】
このように、操舵トルクTと角速度AVとに基づいて、運転者が感じる操舵感覚を判定し、当該判定結果に係るIDに基づいて、図7の(b)に示す対応表72を参照することで、ゲインGを算出(決定)する。例えば、操舵トルクTがTAであり、角速度AVがAVAである場合の判定結果は、操舵感覚Aであり、当該判定結果に係るIDは0であるため、対応表72により、当該ID(ID=0)に対応するゲインG(G=a)が算出される。
【0050】
以下同様に、操舵トルクTがTBであり、角速度AVがAVBである場合の判定結果は、操舵感覚Bであり、当該判定結果に係るIDは1であるため、対応表72により、当該ID(ID=1)に対応するゲインG(G=b)が算出される。
【0051】
操舵トルクTがTCであり、角速度AVがAVCである場合の判定結果は、操舵感覚Cであり、当該判定結果に係るIDは2であるため、対応表72により、当該ID(ID=2)に対応するゲインG(G=c)が算出される。
【0052】
操舵トルクTがTDであり、角速度AVがAVDである場合の判定結果は、操舵感覚Dであり、当該判定結果に係るIDは3であるため、対応表72により、当該ID(ID=3)に対応するゲインG(G=d)が算出される。
【0053】
尚、上述した方法により操舵感覚が判定し辛い場合、つまり、分類マップ71において、操舵感覚Aと操舵感覚Bとが重なる部分(斜線部)、または、操舵感覚Bと操舵感覚Cとが重なる部分(灰色部)の操舵感覚を判定する場合、本実施形態においては、当該分類マップ71の前面に出ている(隠れていない)方の操舵感覚を優先する。
【0054】
詳しくは、操舵感覚Aと操舵感覚Bとが重なる部分(斜線部)の操舵感覚を判定する場合は、分類マップ71において、操舵感覚Aよりも前面に位置する操舵感覚Bを判定結果として優先的に適用し、当該ID(ID=1)に対応するゲインG(G=b)を算出する。同様に、操舵感覚Bと操舵感覚Cとが重なる部分(灰色部)の操舵感覚を判定する場合は、分類マップ71において、操舵感覚Cよりも前面に位置する操舵感覚Bを判定結果として優先的に適用し、当該ID(ID=1)に対応するゲインG(G=b)を算出する。
【0055】
乗算器31(図2)は、微分指令値T1と微分ゲインgとを乗算することにより第2電流指令値I2を算出して、加算器33(図2)に出力する。乗算器32(図2)は、収斂値ASとゲインGとを乗算することにより収斂指令値asを算出して、減算器34(図2)に出力する。加算器33は、第1電流指令値I1に第2電流指令値I2を加算することにより第3電流指令値I3を算出して、減算器34に出力する。減算器34は、第3電流指令値I3から収斂指令値asを減算することにより駆動電流指令値Idを算出して、モータ駆動部51に出力する。尚、乗算器31は、本発明における第2電流指令値算出手段の一実施形態であり、乗算器32は、本発明における収斂指令値算出手段の一実施形態であり、加算器33は、本発明における第3電流指令値算出手段の一実施形態であり、減算器34は、本発明における駆動電流指令値算出手段の一実施形態である。
【0056】
図8は、モータ15を駆動するためのモータ駆動部51の詳細を示す図である。モータ駆動部51は、後述するFET(Field Effect Transistor)ゲート駆動回路52に入力される駆動電流指令値Idに基づいてモータ15をPWM(Pulse Width Modulation)制御で駆動する。
【0057】
詳しくは、モータ駆動部51は、FETゲート駆動回路52、昇圧電源53、FET61〜64で成るHブリッジ回路等から構成されている。FETゲート駆動回路52は、駆動電流指令値Idに基づいて各FET61〜64のゲートを駆動する。
【0058】
FET61またはFET62は、モータ15を駆動する際に、駆動電流指令値Idに基づいて決定された所定のデューティ比のPWM信号によりON/OFFが切り替えられる。FET63またはFET64は、モータ15を駆動する際にONされる。PWM信号の符号から判断されるモータ15の回転方向に応じて、駆動するFET61〜64が切り替わる。
【0059】
例えば、FET64がON状態にあるときに、FET61をON/OFF制御することで、駆動電流指令値Idに応じたレベルの電流が、電源54からFET61、モータ15、FET64、および抵抗66を経て、グランド55に流れて、モータ15が正方向に回転駆動する。
【0060】
また、FET63がON状態にあるときに、FET62をON/OFF制御することで、駆動電流指令値Idに応じたレベルの電流が、電源54からFET62、モータ15、FET63、および抵抗65を経て、グランド55に流れて、モータ15が逆方向に回転駆動する。
【0061】
このように、本実施形態の第1実施例において、ECU10(図2)は、ステアリング1(図1)の操舵トルクTに基づいて微分指令値T1を算出し、操舵トルクTと車速Vに基づいて微分ゲインgと第1電流指令値I1とを算出し、車速Vとモータ15の回転速度REとに基づいて収斂値ASを算出し、操舵トルクTと角速度AVに基づいてゲインGを算出している。
【0062】
そして、微分指令値T1と微分ゲインgとに基づいて第2電流指令値I2を算出し、収斂値ASとゲインGとに基づいて収斂指令値asを算出し、第1電流指令値I1と第2電流指令値I2とに基づいて第3電流指令値I3を算出し、第3電流指令値I3と収斂指令値asとに基づいて駆動電流指令値Idを算出している。
【0063】
このため、操舵トルクTと車速Vに応じて第1電流指令値I1と微分指令値T1のみを変化させる従来技術とは異なり、モータ15(図1)を駆動するための駆動電流指令値Idをきめ細かく制御して、その調整精度を上げることが出来るため、モータ15の駆動力も従来技術に比べて微調整可能となる。これにより、運転者が感じている操舵感覚に応じた的確な補助力(モータ15の駆動力)の供給が可能となるため、ステアリング1の操舵フィーリングを良好にすることが出来る。また、危険回避などの場合におけるハンドルの緊急操舵状態においても、良好な操舵フィーリングが得られる。
【0064】
また、ステアリング1の操舵感覚を判定するための手段として、モータ15の回転数をパラメータの1つとして利用する従来技術とは異なり、本実施形態においては、当該モータ15の回転数を操舵感覚の判定には用いない(図7の(a))ため、車両毎に異なるモータ15の回転数に応じて、電動式パワーステアリングシステム100の設定変更(チューニング)を行う必要がない。
【0065】
更に、操舵感覚の調整を行うための調整値入力部を設けた従来技術とは異なり、操舵感覚の調整を行うための調整値を運転者が入力する必要がないため、運転者の手間を軽減することが出来る。
【0066】
次に、図9に示すECU10(第2実施例)について説明する。尚、本図中の微分指令値算出器21、微分ゲイン算出器22、第1電流指令値算出器23、収斂値算出器24、乗算器31、乗算器32、加算器33、減算器34、モータ駆動部51は、前述のECU10(図2,第1実施例)におけるそれらと同一であり、同一の機能を有するため、以下において、これらに関する説明を省略する。
【0067】
図9中の収斂ゲイン算出器25bには、前述の第1実施例における収斂ゲイン算出器25a(図2)と同様、トルクセンサ11により検出されたステアリング1(図1)の操舵トルクTと、角速度センサ12により検出されたステアリング1の角速度(回転操作速度)AVが入力される。尚、収斂ゲイン算出器25bは、本発明における収斂ゲイン算出手段の一実施形態である。
【0068】
また、これに加えて、車速センサ13により検出された車両の車速Vと、微分指令値T1も入力される。ここで、微分指令値T1は、前述した第1実施例と同様に、操舵トルクTを時間に対して微分することにより微分指令値算出器21で算出した値である。
【0069】
収斂ゲイン算出器25bは、収斂ゲイン算出器25a(図2,第1実施例)と同様、収斂値ASに対するゲインであるゲインGを算出(決定)して、乗算器32に出力する。ここで、収斂値ASは、前述した第1実施例と同様に、車速Vと、モータ15の回転速度REに基づいて、収斂値算出器24で算出した値である。
【0070】
詳しくは、収斂ゲイン算出器25bには、収斂ゲイン算出器25a(図2)と同様、分類マップ71(図7の(a))と、対応表72(図7の(b))とが予め記憶されており、また、これに加えて、操舵トルクTと微分指令値T1と車速Vとに基づいて、或る特定の操舵感覚に該当するか否かを判別(判定)する特定感覚判別グラフ(以下、単に「判別グラフ」と記載)74(図10)が予め記憶されている。尚、判別グラフ74は、本発明における第2判定手段の一実施形態である。
【0071】
ここで、収斂ゲイン算出器25bにおけるゲインGの算出方法は、収斂ゲイン算出器25a(図2)におけるゲインGの算出方法と異なるため、以下において説明する。
【0072】
収斂ゲイン算出器25bでは、操舵トルクTと角速度AVとに基づいて、分類マップ71(図7の(a))により操舵感覚を判定する。尚、分類マップ71(図7の(a))による操舵感覚の判定方法については、収斂ゲイン算出器25a(図2)における判定方法と同様であるため、説明を省略する。
【0073】
これとは別に、収斂ゲイン算出器25bでは、操舵トルクTと微分指令値T1と車速Vとに基づいて、或る特定の操舵感覚に該当するか否かを、判別グラフ74(図10)により判別する。
【0074】
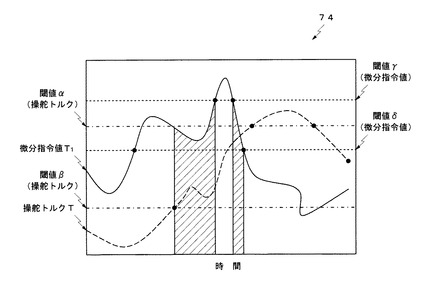
詳しくは、判別グラフ74は、各時点における操舵感覚が、予め設定された特定の(重要な)操舵感覚に該当するか否かを判別するためのグラフであり、当該判別グラフ74には、特定の操舵感覚に該当するか否かを判別するための閾値が予め設定されている。尚、上述の特定の操舵感覚は、操舵感覚A〜D(図7の(a))のいずれでもよいが、本実施例においては、特定の操舵感覚を操舵感覚Aとし、以下においては、これに従って説明を行う。
【0075】
判別グラフ74には、例えば、操舵トルクTの閾値α,β(一点鎖線部)と、微分指令値T1の閾値γ,δ(点線部)が設定されている。尚、これらの閾値α〜δは、車速Vに基づいて逐次変更される。
【0076】
ここで、判別グラフ74に対して、破線で示される操舵トルクTと、実線で示される微分指令値T1とが入力された場合、本実施例においては、例えば、操舵トルクTが、閾値αと閾値βの間の値であり、且つ、微分指令値T1が、閾値γと閾値δの間の値である場合、つまり、操舵トルクTと微分指令値T1が共に、図中の斜線部内の値である場合に、その時点における操舵感覚は操舵感覚Aであると判別する。
【0077】
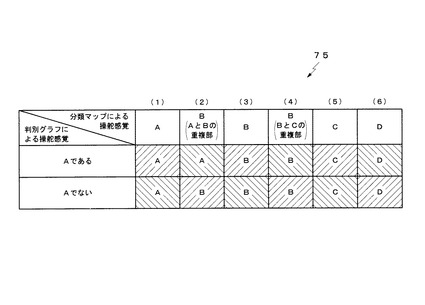
以上のように、分類マップ71(図7の(a))と判別グラフ74(図10)により、操舵感覚がそれぞれ得られた場合、収斂ゲイン算出器25b(図9)では、例えば、図11に示す表75に従って、運転者が感じる操舵感覚の最終判定を行う。尚、最終判定結果(操舵感覚)は、それぞれ図11中の斜線部で示される部分である。
【0078】
詳しくは、(1)のように、分類マップ71による判定結果が操舵感覚Aであり、判別グラフ74による判別結果が操舵感覚Aである場合、最終的に判定される操舵感覚は、操舵感覚Aとなる。判別グラフ74による判別結果が操舵感覚Aでない場合、最終的に判定される操舵感覚は、分類マップ71が優先されて、操舵感覚Aとなる。
【0079】
(2)のように、分類マップ71による判定結果が、操舵感覚Aと操舵感覚Bとが重なる場合(図7の(a)の斜線部)に優先される操舵感覚Bであり、判別グラフ74による判別結果が操舵感覚Aである場合、最終的に判定される操舵感覚は、操舵感覚Aとなる。このときは、分類マップ71の操舵感覚の重なり部分に操舵感覚Aが含まれており、判別グラフ74による判別結果も操舵感覚Aであることから(操舵感覚の一致)、判別グラフ74による判別結果が優先される。判別グラフ74による判別結果が操舵感覚Aでない場合、最終的に判定される操舵感覚は、操舵感覚Bとなる。
【0080】
(3)のように、分類マップ71による判定結果が、操舵感覚Aと操舵感覚Bとが重ならない場合の操舵感覚Bであり、判別グラフ74による判別結果が操舵感覚Aである場合、最終的に判定される操舵感覚は、分類マップ71による判定結果が優先されて操舵感覚Bとなる。このときは、分類マップ71から得られる操舵感覚に、操舵感覚Aが含まれていないので、判別グラフ74による判別結果(操舵感覚A)は優先されない。判別グラフ74による判別結果が操舵感覚Aでない場合、最終的に判定される操舵感覚は、操舵感覚Bとなる。
【0081】
(4)のように、分類マップ71による判定結果が、操舵感覚Bと操舵感覚Cとが重なる場合(図7の(a)の灰色部)に優先される操舵感覚Bであり、判別グラフ74による判別結果が操舵感覚Aである場合、最終的に判定される操舵感覚は、分類マップ71による判定結果が優先されて操舵感覚Bとなる。このときは、分類マップ71の操舵感覚の重なり部分に操舵感覚Aは含まれないため、判別グラフ74による判別結果(操舵感覚A)は優先されない。判別グラフ74による判別結果が操舵感覚Aでない場合、最終的に判定される操舵感覚は、操舵感覚Bとなる。
【0082】
(5)のように、分類マップ71による判定結果が、操舵感覚Bと操舵感覚Cとが重ならない場合の操舵感覚Cであり、判別グラフ74による判別結果が操舵感覚Aである場合、最終的に判定される操舵感覚は、分類マップ71による判定結果が優先されて操舵感覚Cとなる。このときは、(3)と同様の理由により、判別グラフ74による判別結果は優先されない。判別グラフ74による判別結果が操舵感覚Aでない場合、最終的に判定される操舵感覚は、操舵感覚Cとなる。
【0083】
(6)のように、分類マップ71による判定結果が操舵感覚Dであり、判別グラフ74による判別結果が操舵感覚Aである場合、最終的に判定される操舵感覚は、分類マップ71による判定結果が優先されて操舵感覚Dとなる。このときも、(3)と同様の理由により、判別グラフ74による判別結果は優先されない。判別グラフ74による判別結果が操舵感覚Aでない場合、最終的に判定される操舵感覚は、操舵感覚Dとなる。
【0084】
上記判定方法により、運転者が感じる操舵感覚を最終判定し、当該最終判定結果に係るIDに基づいて対応表72(図7の(b))を参照することで、ゲインGを算出する。
【0085】
収斂ゲイン算出器25b(図9)で算出されたゲインGは、乗算器32において収斂値ASと乗算され、当該乗算により算出された収斂指令値asは、減算器34に入力される。減算器34は、加算器33から出力された第3電流指令値I3から収斂指令値asを減算する。尚、第3電流指令値I3は、上述したとおり、第1電流指令値I1と第2電流指令値I2とに基づいて、加算器33で算出した値である。ここで、第1電流指令値I1は、前述した第1実施例と同様に、操舵トルクTと、車速Vとに基づいて、第1電流指令値算出器23で算出した値である。また、第2電流指令値I2は、前述した第1実施例と同様に、微分指令値T1と、微分ゲイン算出器22で算出した微分ゲインgとに基づいて、乗算器31で算出した値である。
【0086】
そして、減算器34は、第3電流指令値I3から収斂指令値asを減算して算出した駆動電流指令値Idを、モータ駆動部51に出力する。尚、駆動電流指令値Idに基づくモータ駆動部51の駆動方法については、前述の第1実施例と同様であるため、説明を省略する。
【0087】
このように、本実施形態の第2実施例において、ECU10(図9)は、前述した操舵感覚の判定方法(第1実施例)に加えて、各時点における操舵感覚が、予め設定された特定の(重要な)操舵感覚に該当するか否かを判別グラフ74(図10)により判別し、分類マップ71(図7の(a))による判定結果と判別グラフ74による判別結果に基づいて、操舵感覚を最終的に判定する。このため、分類マップ71において操舵感覚が重なる部分に該当する場合に、最適の操舵感覚を選択することが出来る。例えば、図11の(2)の場合は、分類マップ71に従えば、本来の操舵感覚はBであるが、判別グラフ74により操舵感覚がAと判別された場合は、BからAに補正されるため、操舵感覚が特定の操舵感覚Aと合致し、より最適なものとなる。こうして、分類マップ71と判別グラフ74とを用いることにより、運転者が感じている操舵感覚をより的確に特定することが出来る。
【0088】
よって、運転者が感じる操舵フィーリングの違和感を更に低減することができ、以って、ステアリング1(図1)の操舵フィーリングをより良好にすることが出来る。尚、その他の効果については、第1実施例と同様であるため、説明を省略する。
【0089】
次に、第3,4実施例について説明する。尚、後述する第3実施例は、図2に示すECU10(第1実施例)の変形例であり、第4実施例は、図9に示すECU10(第2実施例)の変形例である。
【0090】
また、第1実施例と第3実施例、第2実施例と第4実施例の各々においてECU10の機能ブロックに関する変更がないため、第3,第4実施例に係るECU10の機能ブロックについては、それぞれ、図2,図9を流用する。
【0091】
第3実施例においては、第1実施例と同様に、収斂ゲイン算出器25a(図2)にて、分類マップ71(図7の(a))による操舵感覚の判定を行う。
【0092】
しかしながら、本実施例においては、当該判定結果に変化が生じた場合、つまり、前回の判定結果と今回の判定結果が異なる場合は、前回の判定結果を優先し、今回の判定結果は適用しない。尚、前回の判定結果は、本発明における第1判定結果の一例であり、今回の判定結果は、本発明における第2判定結果の一例である。
【0093】
そして、今回の判定結果と同様の判定結果が、今回以降、連続して所定回数得られた場合にのみ、所定回数得られた判定結果を適用して、操舵感覚の変更を行い、連続して所定回数得られない場合は、操舵感覚の変更を行わない。
【0094】
詳しくは、分類マップ71(図7の(a))に基づく判定結果が、前回は操舵感覚Aであり、今回は操舵感覚Bである場合、前回の判定結果である操舵感覚を優先し、今回の判定結果である操舵感覚Bは適用しない。
【0095】
そして、当該操舵感覚Bが、今回以降、連続して所定回数(例えば、10回)得られた場合は、判定結果を操舵感覚Aから操舵感覚Bに変更し、連続して所定回数(例えば、10回)得られない場合は、判定結果を操舵感覚Aのままとする。
【0096】
ここで、上述の今回の判定結果と同様の判定結果が、今回以降、連続して所定回数(例えば、10回)得られない場合の一例としては、まず、操舵感覚Aと判定され、次に、操舵感覚Bと判定され、これ以降、所定回数未満(例えば、8回)操舵感覚Bと判定された後、操舵感覚Aまたは操舵感覚Cと判定される場合や、まず、操舵感覚Aが判定され、次に、操舵感覚B、操舵感覚Cの順に判定された後、操舵感覚A,B,Cの順に繰り返し判定が行われる場合等がある。
【0097】
以上のような判定方法は、第4実施例において、収斂ゲイン算出器25b(図9)でも行われるため、当該収斂ゲイン算出器25bにおける説明を省略する。
【0098】
このように、本実施形態の第3,第4実施例において、各ECU10は、前述したそれぞれの操舵感覚の判定方法(第1〜第4実施例)に加えて、同一の判定結果(操舵感覚)が、連続して所定回数得られたか否かを逐次検証する。そして、検証の結果、連続して所定回数得られた判定結果である場合は、当該判定結果を適用して操舵感覚を変更し、連続して所定回数得られていない判定結果である場合は、当該判定結果を不適用とし、操舵感覚を変更しない。このため、判定結果が頻繁に変わる場合においても、当該判定結果に基づいて操舵感覚が頻繁に変更されることを抑制することが出来る。
【0099】
これにより、運転者が感じる操舵フィーリングの違和感を更に低減することができ、以って、ステアリング1(図1)の操舵フィーリングをより良好にすることが出来る。尚、その他の効果については、第1,第2実施例と同様であるため、説明を省略する。
【0100】
最後に、図12に示す第5実施例、図13に示す第6実施例について説明する。
【0101】
図12に示すECU10(第5実施例)は、図2に示すECU10(第1実施例)の他の変形例であり、収斂ゲイン算出器25aと乗算器32との間に、更に、フィルタ71を設けている。
【0102】
同様に、図13に示すECU10(第6実施例)は、図9に示すECU10(第2実施例)の他の変形例であり、収斂ゲイン算出器25bと乗算器32との間に、更に、フィルタ71を設けている。
【0103】
ここで、上述したフィルタ71は、例えば、LPF(Low Pass Filter)から構成されている。そして、各実施例(第1,第2実施例)において、収斂ゲイン算出器(25a,25b)から出力されたゲインGは、フィルタ71を介して、乗算器32に入力する。尚、フィルタ71は、本発明におけるフィルタ手段の一実施形態である。
【0104】
このように、本実施形態の第5,第6実施例において、各ECU10は、前述したそれぞれの操舵感覚の判定方法(第1,第2実施例)に加えて、或る操舵感覚(例えば、操舵感覚A)から他の操舵感覚(例えば、操舵感覚B)に変更された場合に、当該変更に対応して各収斂ゲイン算出器25a,25bから出力されたゲインGを、フィルタ71を介して、乗算器32に入力している。このため、ゲインの変化を滑らかにするフィルタ71の作用により、操舵感覚の変更に基づくゲインGの急激な変化を抑制することが出来る。
【0105】
これにより、モータ駆動部51(図8)に出力される駆動電流指令値Idの急激な変化を抑制することが出来るため、操舵感覚の切り替えの際に、操舵手が操舵フィーリングの違和感を感じないようにすることが出来る。尚、その他の効果については、第1,第2実施例と同様であるため、説明を省略する。
【0106】
本発明では、以上述べた以外にも種々の実施形態を採用することができる。例えば、上記実施形態の全実施例(第1〜第6実施例)では、微分ゲイン算出器22(例えば、図2)に、車速Vによって異なる3種類の微分ゲイン曲線(図3)を予め記憶したが、これに限られず、車速Vを更に細かく設定して、車速V毎の微分ゲイン曲線を更に多種類記憶してもよい。
【0107】
また、上記実施形態の全実施例では、微分ゲイン曲線(図3)において、車速VがV0である場合の微分ゲインgを、操舵トルクTの値に関わらず一定の値とし、車速VがV1である場合の微分ゲインgを、操舵トルクTの値が大きくなるにつれて小さくなる値とし、同様に、車速VがV2である場合の微分ゲインgを、操舵トルクTの値が大きくなるにつれて小さくなる値としたが、これに限られず、全車速V(V0,V1,V2)において、操舵トルクTの値に関わらず一定で、それぞれ値の異なる微分ゲインgとしてもよい。また、車速VがV0である場合の微分ゲインgを、操舵トルクTの値が大きくなるにつれて小さくなる値としてもよい。さらに、車速VがV0の場合の微分ゲインgよりも、車速VがV1もしくはV2の場合の微分ゲインgのほうが大きくなるような操舵トルクTの値(領域)があってもよい。
【0108】
また、上記実施形態の全実施例では、第1電流指令値算出器23(例えば、図2)に、車速Vによって異なる3種類の第1電流指令値曲線(図4)を予め記憶したが、これに限られず、車速Vを更に細かく設定して、車速V毎の第1電流指令値曲線を更に多種類記憶してもよい。
【0109】
また、上記実施形態の全実施例では、ステアリング1の回転方向に関係なく操舵トルクTを正の値として、当該操舵トルクTの値と車速V毎の第1電流指令値曲線とから第1電流指令値I1を算出したが(図4)、これに限られず、ステアリング1の回転方向が右方向である場合の操舵トルクTを正の値とし、左方向である場合の操舵トルクTを負の値として、当該操舵トルクTの値と車速V毎の第1電流指令値曲線とから第1電流指令値I1を算出してもよい。
【0110】
尚、この場合、ステアリング1の回転方向が左方向である場合の各所定値T0、T1、T2の大小関係は、T0≧T1≧T2となり、T0<0となる。また、第1電流指令値曲線は、図4に示す曲線と当該曲線を原点(T=0,I1=0である点)中心に180°回転させた曲線(図示省略)とが連続する曲線(図示省略)となるため、操舵トルクTが負の値である場合、第1電流指令値I1は、負の値となる。
【0111】
また、上記実施形態の全実施例では、車速V毎の第1電流指令値曲線(図4)において、第1電流指令値I1が飽和状態となる操舵トルクTをそれぞれ所定値T0、T1、T2とし、これら所定値T0、T1、T2の関係を、T0≦T1≦T2としたが、これに限られず、T2≦T0≦T1としてもよい。つまり、所定値T0、T1、T2の大小関係について、特に制約を設けなくてもよい。
【0112】
また、上記実施形態の全実施例では、車速V毎の第1電流指令値曲線(図4)において、第1電流指令値I1の飽和値が、車速V毎に異なったが、これに限られず、車速毎に異ならない値としてもよい。つまり、所定値T0、T1における第1電流指令値I1が同一となるようにしてもよいし、所定値T0、T2における第1電流指令値I1が同一となるようにしてもよい。同様に、所定値T1、T2における第1電流指令値I1が同一となるようにしてもよいし、所定値T0、T1、T2における第1電流指令値I1が同一となるようにしてもよい。
【0113】
また、上記実施形態の全実施例では、分類マップ71(図7の(a))を、操舵感覚A〜Dの4種類の操舵感覚が分布している分類マップとしたが、これに限られず、更に多種類の操舵感覚が分布している分類マップとしてもよい。
【0114】
尚、この場合、各収斂ゲイン算出器25a,25bには、分類マップ71での判定結果に係るIDとゲイン値(ゲインG)とが対応付けられている対応表72(図7の(b))も予め記憶されているため、分類マップ71における操舵感覚の種類増加に伴って、当該分類マップ71での判定結果(操舵感覚)に係るIDも増加する必要があり、また、当該IDに対応するゲイン値(ゲインG)も設定する必要がある。
【0115】
また、上記実施形態の全実施例では、分類マップ71(図7の(a))において、操舵感覚Aと操舵感覚Bとが重なる部分(斜線部)の操舵感覚を判定する場合は、操舵感覚Bを判定結果として優先的に適用し、操舵感覚Bと操舵感覚Cとが重なる部分(灰色部)の操舵感覚を判定する場合は、操舵感覚Bを判定結果として優先的に適用したが、これに限られず、例えば、操舵感覚Aと操舵感覚Bとが重なる部分(斜線部)の操舵感覚を判定する場合は、操舵感覚Aを判定結果として優先的に適用してもよい。つまり、各操舵感覚の重なり部分において、操舵感覚の優先順位は、任意に選定することが出来る。
【0116】
また、上記実施形態の第2,第4,第6実施例では、収斂ゲイン算出器25bに予め記憶された判別グラフ74(図10)における特定の(重要な)操舵感覚を操舵感覚Aとしたが、これに限られず、操舵感覚Bや、操舵感覚Cを特定の操舵感覚としてもよい。
【0117】
また、上記実施形態の第2,第4,第6実施例において、判別グラフ74(図10)に、操舵トルクTの閾値α,βと、微分指令値T1の閾値γ,δを設定し、操舵トルクTが、閾値αと閾値βの間の値であり、且つ、微分指令値T1が、閾値γと閾値δの間の値である場合に、予め設定された特定の操舵感覚(例えば、操舵感覚A)に該当すると判定したが、これに限られず、例えば、操舵トルクTが、閾値αと閾値βの間の値であり、且つ、微分指令値T1が、閾値γと閾値δの間の値でない場合に、特定の操舵感覚(例えば、操舵感覚A)に該当すると判定してもよい。
【0118】
また、特定の操舵感覚に該当する条件として、これ以外に、例えば、操舵トルクTが、閾値αと閾値βの間の値でなく、且つ、微分指令値T1が、閾値γと閾値δの間の値である場合としてもよく、操舵トルクTが、閾値αと閾値βの間の値でなく、且つ、微分指令値T1が、閾値γと閾値δの間の値でない場合としてもよい。
【0119】
また、上記実施形態の全実施例では、角速度センサ12を用いて角速度(回転操作速度)を求めたが、これに限られず、ステアリング1の回転量を検出するセンサ(図示省略)や、モータ15の回転速度を検出するモータ回転センサ14等の出力値から角速度を推定するようにしても良い。
【0120】
また、上記実施形態の全実施例において、モータ15をブラシモータとしたが、これに限られず、ブラシレスモータとしてもよい。
【0121】
さらに、上記実施形態では、電動式パワーステアリングシステム100を、車両(例えば、自動車)に搭載したが、これに限られず、ステアリング1を備えるものであればよく、例えば、船舶や航空機等に搭載してもよい。
【図面の簡単な説明】
【0122】
【図1】電動式パワーステアリングシステムを示す図である。
【図2】ECUの機能ブロックを示す図である。
【図3】微分ゲイン曲線を示す図である。
【図4】第1電流指令値曲線を示す図である。
【図5】第1粘性値曲線を示す図である。
【図6】第2粘性値曲線を示す図である。
【図7】分類マップと対応表を示す図である。
【図8】モータ駆動部を示す図である。
【図9】ECUの機能ブロックの他の実施例を示す図である。
【図10】判別グラフを示す図である。
【図11】最終判定を行うための表を示す図である。
【図12】ECUの機能ブロックの他の実施例を示す図である。
【図13】ECUの機能ブロックの他の実施例を示す図である。
【符号の説明】
【0123】
1 ステアリング(操舵機構)
10 ECU
11 トルクセンサ
12 角速度センサ
13 車速センサ
14 モータ回転センサ
15 モータ
21 微分指令値算出器
22 微分ゲイン算出器
23 第1電流指令値算出器
24 収斂値算出器
25a、25b 収斂ゲイン算出器
31、32 乗算器
33 加算器
34 減算器
51 モータ駆動部
71 分類マップ
72 対応表
74 特定感覚判別グラフ
【技術分野】
【0001】
本発明は、電動式パワーステアリングシステムに用いられる電動式パワーステアリング制御装置に関するものである。
【背景技術】
【0002】
電動式パワーステアリングシステムは、例えば、自動車において、操舵機構を構成するステアリングの操舵時に電動モータにより補助力を与えることにより、運転者のステアリング操舵を補助するシステムである。このシステムにより、運転者は軽い力でステアリングを操舵することが出来る。
【0003】
このような電動式パワーステアリングシステムにおいて、ステアリングの操舵フィーリングを良好にするために、特許文献1では、操舵角センサからの出力に基づく操舵角に応じた操舵角速度データと、車速センサからの出力に基づく車速データとを、所定時間内に所定回数記憶し、記憶した当該データの内、上限および下限を削除した後、残りのデータに基づいて、平均速度および平均操舵角速度を算出する。この、算出した平均速度および平均操舵角速度と、予め記憶されている標準操舵パターンとを比較することにより、運転者の特性を判断する。そして、当該判断に基づいて、標準アシストパターンを有するコントローラにより電動モータを制御して、アシスト力を発揮させている。
【0004】
また、特許文献2では、操舵トルクと車速とに基づいて操舵補助指令値を演算し、操舵補助指令値とモータの電流値とから電流制御値を演算し、モータの出力電流と端子間電圧とからモータの角速度(舵角速度)を推定し、モータの角速度に応じた所定のゲインで該角速度を定数倍して収斂性信号(収斂制御値)としている。そして、モータの角速度と出力電流とからステアリングの操舵状態を検出し、モータの角速度が所定値以上でかつ出力電流が所定値以上の場合に上記ゲインを切り替え、電流制御値から収斂性信号を減算して得られた指令値により、モータを駆動している。
【0005】
特許文献3では、ステアリングホイールの操舵トルクを検出するトルクセンサの出力と車速を検出する車速センサの出力とによりアシスト電流値を決定するとともに、トルクセンサの出力と車速により決められた微分ゲインであって、所定に操舵トルクの範囲において、車速が0である場合は中立時に小さく、操舵トルクが増加するにつれて大となる微分ゲインに、トルクセンサの出力の微分量を掛け合わせて微分指令値を決定する。そして、アシスト電流値に微分指令値を足すことで、アシストモータを駆動して、操舵トルクにアシストトルクを付加している。
【0006】
特許文献4では、運転者が感じている操作感を的確に認識するために、ステアリング装置に対して加えられているトルクセンサ値を横軸とし、アシストモータの回転数値を縦軸とする2次元グラフに、各感性指標の領域としての感性領域を設定し、当該感性領域が設定された感性識別マップを車速値毎に設けて記憶部に記憶する。そして、入力される車速値、トルクセンサ値および回転数値に基づいて、感性識別マップを参照することにより、各時点において運転者が感じている操舵感を示す感性指標を出力する。
【0007】
【特許文献1】特許第3222506号公報
【特許文献2】特許第3637714号公報
【特許文献3】特許第3809594号公報
【特許文献4】特開2007−276708号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
ところで、電動式パワーステアリングシステムでは、予め設定されている制御プログラムに従って電動モータが回転し、当該電動モータの回転力によって、ステアリングに補助力が供給される。しかしながら、現状では、運転者が感じている操舵感覚と合致するような補助力を供給することが出来る制御プログラムが十分に実現されていないため、運転者が操舵に違和感を覚えやすく、操舵フィーリングが悪くなる恐れがある。
【0009】
本発明は、上述した問題点に鑑み、運転者が感じている操舵感覚に応じた的確な補助力を供給して、操舵フィーリングを良好にすることが出来る電動式パワーステアリング制御装置を提供することを目的としている。
【課題を解決するための手段】
【0010】
本発明に係る電動式パワーステアリング制御装置は、車両が有する操舵機構の操舵トルクを入力する操舵トルク入力手段と、操舵機構の回転角速度を入力する角速度入力手段と、車両の車速を入力する車速入力手段と、操舵機構に補助力を与えるモータの回転速度を入力する回転速度入力手段と、操舵トルク入力手段と角速度入力手段と車速入力手段と回転速度入力手段とからの入力に基づいて、モータを駆動するための駆動電流指令値を出力する駆動電流指令値出力手段とを備えており、駆動電流指令値出力手段は、操舵トルクを微分して微分指令値を算出する微分指令値算出手段と、操舵トルクと車速とに基づいて微分指令値に対するゲインである微分ゲインを算出する微分ゲイン算出手段と、操舵トルクと車速とに基づいて第1電流指令値を算出する第1電流指令値算出手段と、車速と回転速度とに基づいて収斂値を算出する収斂値算出手段と、操舵トルクと回転角速度とに基づいて操舵機構の操舵感覚を判定し、当該判定結果に基づいて収斂値に対するゲインである収斂ゲインを算出する収斂ゲイン算出手段と、微分指令値と微分ゲインとを乗算して第2電流指令値を算出する第2電流指令値算出手段と、収斂値と収斂ゲインとを乗算して収斂指令値を算出する収斂指令値算出手段と、第1電流指令値と第2電流指令値とを加算して第3電流指令値を算出する第3電流指令値算出手段と、第3電流指令値から収斂指令値を減算して駆動電流指令値を算出する駆動電流指令値算出手段とを有している。
【0011】
このようにすることで、操舵トルクと車速に応じてアシスト電流値と微分指令値のみを変化させる従来技術とは異なり、モータを駆動するための駆動電流指令値をきめ細かく制御して、その調整精度を上げることが出来るため、モータの駆動力も従来技術に比べて微調整可能となる。これにより、操舵手が感じている操舵感覚に応じた的確な補助力(モータの駆動力)の供給が可能となるため、操舵フィーリングを良好にすることが出来る。
【0012】
本発明の電動式パワーステアリング制御装置において、収斂ゲイン算出手段は、操舵トルクと回転角速度とに基づいて分類された複数の操舵感覚の中から、各操舵トルクおよび回転角速度に対応する操舵感覚を判定する第1判定手段と、第1判定手段による判定結果に基づいて当該判定結果に対応する収斂ゲインを決定する収斂ゲイン決定手段とを有してもよい。
【0013】
このようにすることで、モータの回転数に対応付けて操舵感覚を判定する従来技術とは異なり、操舵感覚の判定にモータの回転数を用いないため、車両毎に異なる回転数に合わせて、操舵感覚判定のためのチューニングを行う必要が無い。このため、複雑なチューニングが不要となって、コストの削減を図ることが出来る。また、従来において行っていた操舵手による操舵感覚の調整値の入力も行う必要が無いため、当該調整値入力の手間を省略することが出来る。
【0014】
本発明の電動式パワーステアリング制御装置において、第1判定手段は、操舵トルクおよび回転角速度に対応する操舵感覚が複数ある場合は、予め決められた優先順位に従って、当該複数の操舵感覚の内のいずれかの操舵感覚を判定結果としてもよい。
【0015】
このようにすることで、操舵トルクおよび回転角速度に対応する操舵感覚が複数ある場合においても、優先順位に従っていずれかの操舵感覚を、第1判定手段による判定結果とすることが出来るため、当該判定におけるシステムエラーなどを抑制することが出来る。
【0016】
本発明の電動式パワーステアリング制御装置において、収斂ゲイン算出手段は、操舵トルクと微分指令値と車速とに基づいて、操舵機構の操舵感覚が、特定の操舵感覚に該当するか否かを判定する第2判定手段を有していてもよい。そして、第2判定手段による判定結果が該当有の場合は、第1判定手段によって判定された操舵感覚が複数あるか否かを検証し、当該操舵感覚が複数ある場合は、第2判定手段による特定の操舵感覚が、第1判定手段による複数の操舵感覚のいずれかと一致するか否かを検証し、一致する操舵感覚がある場合は、当該一致する操舵感覚を操舵機構の操舵感覚として判定してもよい。
【0017】
このようにすることで、第1判定手段による判定結果と第2判定手段による判定結果に基づいて、操舵感覚を最終的に判定するため、操舵手が感じている操舵感覚をより的確に特定することが出来る。これにより、操舵手が感じる操舵フィーリングの違和感を更に低減することができ、以って、操舵フィーリングをより良好にすることが出来る。
【0018】
本発明の電動式パワーステアリング制御装置において、電流ゲイン算出手段は、第1判定手段での判定結果である第1判定結果と、第1判定結果に続く判定結果である第2判定結果とが異ならない場合は、第2判定結果に基づいて操舵機構の操舵感覚を判定し、第1判定結果と第2判定結果とが異なる場合であり、かつ、第2判定結果と同じ判定結果が、当該第2判定結果以降、連続して所定回数得られていない場合は、第1判定結果に基づいて操舵機構の操舵感覚を判定し、第1判定結果と第2判定結果とが異なる場合であり、かつ、第2判定結果と同じ判定結果が、当該第2判定結果以降、連続して所定回数得られた場合は、第2判定結果に基づいて操舵機構の操舵感覚を判定してもよい。
【0019】
このようにすることで、第1判定手段による判定結果が頻繁に変わる場合においても、当該判定結果に基づいて操舵感覚が頻繁に変更されることを抑制することが出来る。これにより、操舵手が感じる操舵フィーリングの違和感を更に低減することができ、以って、操舵フィーリングをより良好にすることが出来る。
【0020】
本発明の電動式パワーステアリング制御装置において、収斂ゲイン算出手段と収斂指令値算出手段との間に、当該収斂ゲイン算出手段から出力されるゲインの変化を滑らかにするフィルタ手段を設けてもよい。
【0021】
このようにすることで、操舵感覚の変更に基づくゲインの急激な変化を抑制することが出来る。これにより、モータを駆動するための駆動電流指令値の急激な変化を抑制することが出来るため、操舵感覚の切り替えの際に、操舵手が操舵フィーリングの違和感を感じないようにすることが出来る。
【発明の効果】
【0022】
本発明によれば、操舵トルクと、操舵機構の回転角速度と、車速と、操舵機構に補助力を与えるモータの回転パラメータと、操舵トルクと回転角速度とに基づいて判定した操舵機構の操舵感覚に基づいて、モータを駆動するための駆動電流指令値を算出するため、当該駆動電流指令値をきめ細かく制御して、その調整精度を上げることが出来る。これにより、操舵手が感じている操舵感覚に応じた的確な補助力(モータの駆動力)の供給が可能となるため、操舵フィーリングを良好にすることが出来る。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施形態につき、図面を参照しながら説明する。
尚、図1〜図2,図8〜図9,図12〜図13において、同一部分または対応する部分には、同一符号を付してある。
【0024】
図1は、本発明の実施形態であり、後述する電動式パワーステアリング制御装置(例えば、図2)等から成る電動式パワーステアリングシステム100を示す図である。電動式パワーステアリングシステム100は、車両(例えば、自動車)に搭載される。
【0025】
図中の電動式パワーステアリングシステム100において、ステアリング1を操舵(回転操作)すると、その操舵力が、軸2aを介してギア機構3に伝達され、さらに、軸2bとギア機構5を介して軸6に伝達される。軸6は、当該操舵力によって駆動し、軸6が駆動することで、リンク機構7を介して車輪8の向きが変わる。
【0026】
また、モータ15が回転すると、その駆動力が、クラッチ4を介してギア機構3に伝達され、さらに、軸2bとギア機構5を介して軸6に伝達される。これにより、軸6には、ステアリング1の操舵により伝達された操舵力に加えて、モータ15の駆動力も伝達されるため、当該駆動力によって、軸6の駆動と車輪8の転向が補助される。即ち、ステアリング1での操舵が、モータ15により補助される。尚、本実施形態におけるモータ15は、例えば、ブラシモータから成る。
【0027】
トルクセンサ11は、ステアリング1により加えられる操舵トルクを検出する。 角速度センサ12は、ステアリング1の角速度(回転操作速度)を検出する。車速センサ13は、車両の車速(走行速度)を検出する。モータ回転センサ14は、モータ15の回転速度を検出する。ここで、回転速度に代えて、単位時間当たりの回転数を用いることも出来るが、回転速度が分かれば回転数も自ずと分かるので、回転速度を検出することは、回転数を検出することと実質的に同じである。よって、本発明における回転速度は、回転数も含む概念である。尚、トルクセンサ11は、本発明における操舵トルク入力手段の一実施形態であり、角速度センサ12は、本発明における角速度入力手段の一実施形態であり、車速センサ13は、本発明における車速入力手段の一実施形態であり、モータ回転センサ14は、本発明における回転速度入力手段の一実施形態である。
【0028】
ECU(Electronic Control Unit)10は、クラッチ4をON(結合)/OFF(離脱)制御する。また、ECU10は、トルクセンサ11により検出した操舵トルク、角速度センサ12により検出した角速度、車速センサ13により検出した車速に基づいて、モータ15を駆動するための電流指令値を決定し、当該電流指令値に基づいてモータ15の駆動を制御する。尚、ECU10は、本発明における駆動電流指令値出力手段の一実施形態である。
【0029】
バッテリ9は、ECU10とモータ15に電力を供給する。尚、ECU10、トルクセンサ11、角速度センサ12、車速センサ13、モータ回転センサ14は、本発明に係る電動式パワーステアリング制御装置の一実施形態を構成する。
【0030】
図2、図9、図12〜図13は、ECU10の機能ブロックを示す図であり、各図中において一点鎖線で囲われている部分(但し、モータ駆動部51を除く)が、ECU10の内部においてプログラムにより実行される機能である。
【0031】
また、図2は、本実施形態の第1実施例におけるECU10の機能ブロックを示す図であり、以下同様に、図9は第2実施例、図12は第5実施例、図13は第6実施例を示す図である。尚、第3,第4実施例については、図示を省略する(詳細については後述する)。
【0032】
まず始めに、図2に示すECU10(第1実施例)について説明する。トルクセンサ11により検出されたステアリング1(図1)の操舵トルクTは、微分指令値算出器21、微分ゲイン算出器22、第1電流指令値算出器23、収斂ゲイン算出器25aに入力される。
【0033】
角速度センサ12により検出されたステアリング1の角速度AVは、収斂ゲイン算出器25aに入力される。車速センサ13により検出された車両の車速Vは、微分ゲイン算出器22、第1電流指令値算出器23、収斂値算出器24に入力される。モータ回転センサ14により検出されたモータ15の回転速度REは、収斂値算出器24に入力される。
【0034】
微分指令値算出器21は、操舵トルクTを時間に対して微分することにより、微分指令値T1を算出して、乗算器31に出力する。微分ゲイン算出器22は、操舵トルクTと車速Vとに基づいて、微分指令値T1に対するゲインである微分ゲインgを算出して、乗算器31に出力する。詳しくは微分ゲイン算出器22には、車速Vによって異なる3種類の微分ゲイン曲線(図3)が予め記憶されている。尚、微分指令値算出器21は、本発明における微分指令値算出手段の一実施形態を構成する。
【0035】
図3に示す微分ゲイン曲線において、車速VがV0(例えば、V0=0:車両停止時)である場合(実線)の微分ゲインgは、操舵トルクTの値に関わらず一定である。車速VがV1(例えば、V1=10:車両走行時)である場合(点線)の微分ゲインgは、操舵トルクTの値が大きくなるにつれて小さくなる。同様に、車速VがV2(例えば、V2=20:車両走行時)である場合(一点鎖線)の微分ゲインgは、操舵トルクTの値が大きくなるにつれて小さくなる。
【0036】
また、操舵トルクTの値に関わらず、車速VがV0である場合の微分ゲインgは、車速VがV1,V2である場合の微分ゲインgよりも常に大きく、車速VがV1である場合の微分ゲインgは、車速VがV2である場合の微分ゲインgよりも常に大きい。
【0037】
微分ゲイン算出器22は、車速Vに応じていずれかの微分ゲイン曲線を選択し、当該微分ゲイン曲線と操舵トルクTとから微分ゲインgを算出する。尚、微分ゲイン算出器22は、本発明における微分ゲイン算出手段の一実施形態を構成する。
【0038】
第1電流指令値算出器23(図2)は、操舵トルクTと車速Vとに基づいて、第1電流指令値I1を算出して、加算器33に出力する。詳しくは、第1電流指令値算出器23には、車速Vによって異なる3種類の第1電流指令値曲線(図4)が予め記憶されている。尚、第1電流指令値算出器23は、本発明における第1電流指令値算出手段の一実施形態を構成する。
【0039】
図4に示す第1電流指令値曲線において、車速VがV0(例えば、V0=0:車両停止時)である場合(実線)の第1電流指令値I1は、操舵トルクTが所定値T0となるまで増大し、当該所定値T0を超えると一定になる。以下同様に、車速VがV1(例えば、V1=10:車両走行時)である場合(点線)の第1電流指令値I1は、操舵トルクTが所定値T1となるまで増大し、当該所定値T1を超えると一定になる。車速VがV2(例えば、V2=20:車両走行時)である場合(一点鎖線)の第1電流指令値I1は、操舵トルクTが所定値T2となるまで増大し、当該所定値T2を超えると一定になる。尚、本実施例では、上述した各所定値T0、T1、T2の関係は、T0≦T1≦T2であり、また、T0>0としている。
【0040】
また、操舵トルクTの値に関わらず、車速VがV0である場合の第1電流指令値I1は、車速VがV1,V2である場合の第1電流指令値I1よりも常に大きく、車速VがV1である場合の第1電流指令値I1は、車速VがV2である場合の第1電流指令値I1よりも常に大きくなるようにしている。
【0041】
第1電流指令値算出器23は、車速Vに応じていずれかの第1電流指令値曲線を選択し、当該第1電流指令値曲線と操舵トルクTとから第1電流指令値I1を算出する。
【0042】
収斂値算出器24(図2)は、車速Vとモータ15の回転速度REに基づいて、収斂値ASを算出して、乗算器32に出力する。詳しくは、収斂値算出器24には、車速Vと当該車速Vに係る粘性(収斂強度)との関係を示す第1粘性値曲線(図5)と、モータ15の回転速度REと当該回転速度REに係る粘性(収斂強度)との関係を示す第2粘性値曲線(図6)とが予め記憶されている。尚、収斂値算出器24は、本発明における収斂値算出手段の一実施形態を構成する。
【0043】
図5に示す第1粘性値曲線において、第1粘性値Kxは、車速Vが0の場合は、値が0より大きな所定値K0であり、車速Vが所定値V0となるまで一旦減少する。そして、車速Vが所定値V0を超えると、所定値V1となるまで当該所定値V0時の所定値であるK1のまま一定になり、車速Vが所定値V1を超えると、所定値V2となるまで再び増加する。車速Vが所定値V2を超えると、当該所定値V2時の所定値であるK2のまま再び一定になる。尚、上述した車速Vの所定値V0、V1、V2の関係は、V0<V1<V2であり、V0>0である。また、上述した第1粘性値Kxの所定値K0、K1、K2の関係は、K1<K0≦K2であり、K1>0である。
【0044】
図6に示す第2粘性値曲線において、第2粘性値Kyは、モータ15の回転速度REが0から所定値RE0となるまではKy=0であり、所定値RE0から所定値RE1までは増大し、当該所定値RE0を超えると一定になる。ここで、回転速度REが、所定値RE0である場合の第2粘性値Kyは、K3である。尚、RE0>0であり、K3>0である。
【0045】
収斂値算出器24は、車速Vに基づいて、第1粘性値曲線(図5)より、第1粘性値Kxを算出(決定)し、モータ15の回転速度REに基づいて、第2粘性値曲線(図6)より、第2粘性値Kyを算出(決定)し、当該第1粘性値Kxと第2粘性値Kyを乗算して、収斂値ASを算出する。
【0046】
収斂ゲイン算出器25a(図2)は、収斂値ASに対するゲインであるゲインGを算出(決定)して、乗算器32に出力する。詳しくは、収斂ゲイン算出器25aには、操舵トルクTと角速度AVとに基づいて、運転者が感じる操舵感覚を分類した分類マップ71(図7の(a))と、当該分類マップ71での判定結果に係る識別子(以下、「ID」と記載)とゲイン値(ゲインG)とが対応付けられている対応表72(図5の(b))とが予め記憶されている。尚、収斂ゲイン算出器25aは、本発明に係る収斂ゲイン算出手段の一実施形態であり、分類マップ71は、本発明における第1判定手段の一実施形態であり、対応表72は、本発明におけるゲイン決定手段の一実施形態である。また、ゲインGは、本発明における収斂ゲインに対応している。
【0047】
図7の(a)に示す分類マップ71には、例えば、操舵感覚A(破線内の領域)と、操舵感覚B(実線内の領域)と、操舵感覚C(一点鎖線内の領域)と、操舵感覚A〜Cのいずれにも属さない操舵感覚Dの異なる4種類の操舵感覚が分布している。
【0048】
また、各操舵感覚(A〜D)には、上述したIDが予め設定されており、例えば、判定結果が操舵感覚Aである場合のIDは、ID=0である。以下同様に、判定結果が操舵感覚Bである場合のIDは、ID=1であり、操舵感覚Cである場合のIDは、ID=2であり、操舵感覚Dである場合のIDは、ID=3である。
【0049】
このように、操舵トルクTと角速度AVとに基づいて、運転者が感じる操舵感覚を判定し、当該判定結果に係るIDに基づいて、図7の(b)に示す対応表72を参照することで、ゲインGを算出(決定)する。例えば、操舵トルクTがTAであり、角速度AVがAVAである場合の判定結果は、操舵感覚Aであり、当該判定結果に係るIDは0であるため、対応表72により、当該ID(ID=0)に対応するゲインG(G=a)が算出される。
【0050】
以下同様に、操舵トルクTがTBであり、角速度AVがAVBである場合の判定結果は、操舵感覚Bであり、当該判定結果に係るIDは1であるため、対応表72により、当該ID(ID=1)に対応するゲインG(G=b)が算出される。
【0051】
操舵トルクTがTCであり、角速度AVがAVCである場合の判定結果は、操舵感覚Cであり、当該判定結果に係るIDは2であるため、対応表72により、当該ID(ID=2)に対応するゲインG(G=c)が算出される。
【0052】
操舵トルクTがTDであり、角速度AVがAVDである場合の判定結果は、操舵感覚Dであり、当該判定結果に係るIDは3であるため、対応表72により、当該ID(ID=3)に対応するゲインG(G=d)が算出される。
【0053】
尚、上述した方法により操舵感覚が判定し辛い場合、つまり、分類マップ71において、操舵感覚Aと操舵感覚Bとが重なる部分(斜線部)、または、操舵感覚Bと操舵感覚Cとが重なる部分(灰色部)の操舵感覚を判定する場合、本実施形態においては、当該分類マップ71の前面に出ている(隠れていない)方の操舵感覚を優先する。
【0054】
詳しくは、操舵感覚Aと操舵感覚Bとが重なる部分(斜線部)の操舵感覚を判定する場合は、分類マップ71において、操舵感覚Aよりも前面に位置する操舵感覚Bを判定結果として優先的に適用し、当該ID(ID=1)に対応するゲインG(G=b)を算出する。同様に、操舵感覚Bと操舵感覚Cとが重なる部分(灰色部)の操舵感覚を判定する場合は、分類マップ71において、操舵感覚Cよりも前面に位置する操舵感覚Bを判定結果として優先的に適用し、当該ID(ID=1)に対応するゲインG(G=b)を算出する。
【0055】
乗算器31(図2)は、微分指令値T1と微分ゲインgとを乗算することにより第2電流指令値I2を算出して、加算器33(図2)に出力する。乗算器32(図2)は、収斂値ASとゲインGとを乗算することにより収斂指令値asを算出して、減算器34(図2)に出力する。加算器33は、第1電流指令値I1に第2電流指令値I2を加算することにより第3電流指令値I3を算出して、減算器34に出力する。減算器34は、第3電流指令値I3から収斂指令値asを減算することにより駆動電流指令値Idを算出して、モータ駆動部51に出力する。尚、乗算器31は、本発明における第2電流指令値算出手段の一実施形態であり、乗算器32は、本発明における収斂指令値算出手段の一実施形態であり、加算器33は、本発明における第3電流指令値算出手段の一実施形態であり、減算器34は、本発明における駆動電流指令値算出手段の一実施形態である。
【0056】
図8は、モータ15を駆動するためのモータ駆動部51の詳細を示す図である。モータ駆動部51は、後述するFET(Field Effect Transistor)ゲート駆動回路52に入力される駆動電流指令値Idに基づいてモータ15をPWM(Pulse Width Modulation)制御で駆動する。
【0057】
詳しくは、モータ駆動部51は、FETゲート駆動回路52、昇圧電源53、FET61〜64で成るHブリッジ回路等から構成されている。FETゲート駆動回路52は、駆動電流指令値Idに基づいて各FET61〜64のゲートを駆動する。
【0058】
FET61またはFET62は、モータ15を駆動する際に、駆動電流指令値Idに基づいて決定された所定のデューティ比のPWM信号によりON/OFFが切り替えられる。FET63またはFET64は、モータ15を駆動する際にONされる。PWM信号の符号から判断されるモータ15の回転方向に応じて、駆動するFET61〜64が切り替わる。
【0059】
例えば、FET64がON状態にあるときに、FET61をON/OFF制御することで、駆動電流指令値Idに応じたレベルの電流が、電源54からFET61、モータ15、FET64、および抵抗66を経て、グランド55に流れて、モータ15が正方向に回転駆動する。
【0060】
また、FET63がON状態にあるときに、FET62をON/OFF制御することで、駆動電流指令値Idに応じたレベルの電流が、電源54からFET62、モータ15、FET63、および抵抗65を経て、グランド55に流れて、モータ15が逆方向に回転駆動する。
【0061】
このように、本実施形態の第1実施例において、ECU10(図2)は、ステアリング1(図1)の操舵トルクTに基づいて微分指令値T1を算出し、操舵トルクTと車速Vに基づいて微分ゲインgと第1電流指令値I1とを算出し、車速Vとモータ15の回転速度REとに基づいて収斂値ASを算出し、操舵トルクTと角速度AVに基づいてゲインGを算出している。
【0062】
そして、微分指令値T1と微分ゲインgとに基づいて第2電流指令値I2を算出し、収斂値ASとゲインGとに基づいて収斂指令値asを算出し、第1電流指令値I1と第2電流指令値I2とに基づいて第3電流指令値I3を算出し、第3電流指令値I3と収斂指令値asとに基づいて駆動電流指令値Idを算出している。
【0063】
このため、操舵トルクTと車速Vに応じて第1電流指令値I1と微分指令値T1のみを変化させる従来技術とは異なり、モータ15(図1)を駆動するための駆動電流指令値Idをきめ細かく制御して、その調整精度を上げることが出来るため、モータ15の駆動力も従来技術に比べて微調整可能となる。これにより、運転者が感じている操舵感覚に応じた的確な補助力(モータ15の駆動力)の供給が可能となるため、ステアリング1の操舵フィーリングを良好にすることが出来る。また、危険回避などの場合におけるハンドルの緊急操舵状態においても、良好な操舵フィーリングが得られる。
【0064】
また、ステアリング1の操舵感覚を判定するための手段として、モータ15の回転数をパラメータの1つとして利用する従来技術とは異なり、本実施形態においては、当該モータ15の回転数を操舵感覚の判定には用いない(図7の(a))ため、車両毎に異なるモータ15の回転数に応じて、電動式パワーステアリングシステム100の設定変更(チューニング)を行う必要がない。
【0065】
更に、操舵感覚の調整を行うための調整値入力部を設けた従来技術とは異なり、操舵感覚の調整を行うための調整値を運転者が入力する必要がないため、運転者の手間を軽減することが出来る。
【0066】
次に、図9に示すECU10(第2実施例)について説明する。尚、本図中の微分指令値算出器21、微分ゲイン算出器22、第1電流指令値算出器23、収斂値算出器24、乗算器31、乗算器32、加算器33、減算器34、モータ駆動部51は、前述のECU10(図2,第1実施例)におけるそれらと同一であり、同一の機能を有するため、以下において、これらに関する説明を省略する。
【0067】
図9中の収斂ゲイン算出器25bには、前述の第1実施例における収斂ゲイン算出器25a(図2)と同様、トルクセンサ11により検出されたステアリング1(図1)の操舵トルクTと、角速度センサ12により検出されたステアリング1の角速度(回転操作速度)AVが入力される。尚、収斂ゲイン算出器25bは、本発明における収斂ゲイン算出手段の一実施形態である。
【0068】
また、これに加えて、車速センサ13により検出された車両の車速Vと、微分指令値T1も入力される。ここで、微分指令値T1は、前述した第1実施例と同様に、操舵トルクTを時間に対して微分することにより微分指令値算出器21で算出した値である。
【0069】
収斂ゲイン算出器25bは、収斂ゲイン算出器25a(図2,第1実施例)と同様、収斂値ASに対するゲインであるゲインGを算出(決定)して、乗算器32に出力する。ここで、収斂値ASは、前述した第1実施例と同様に、車速Vと、モータ15の回転速度REに基づいて、収斂値算出器24で算出した値である。
【0070】
詳しくは、収斂ゲイン算出器25bには、収斂ゲイン算出器25a(図2)と同様、分類マップ71(図7の(a))と、対応表72(図7の(b))とが予め記憶されており、また、これに加えて、操舵トルクTと微分指令値T1と車速Vとに基づいて、或る特定の操舵感覚に該当するか否かを判別(判定)する特定感覚判別グラフ(以下、単に「判別グラフ」と記載)74(図10)が予め記憶されている。尚、判別グラフ74は、本発明における第2判定手段の一実施形態である。
【0071】
ここで、収斂ゲイン算出器25bにおけるゲインGの算出方法は、収斂ゲイン算出器25a(図2)におけるゲインGの算出方法と異なるため、以下において説明する。
【0072】
収斂ゲイン算出器25bでは、操舵トルクTと角速度AVとに基づいて、分類マップ71(図7の(a))により操舵感覚を判定する。尚、分類マップ71(図7の(a))による操舵感覚の判定方法については、収斂ゲイン算出器25a(図2)における判定方法と同様であるため、説明を省略する。
【0073】
これとは別に、収斂ゲイン算出器25bでは、操舵トルクTと微分指令値T1と車速Vとに基づいて、或る特定の操舵感覚に該当するか否かを、判別グラフ74(図10)により判別する。
【0074】
詳しくは、判別グラフ74は、各時点における操舵感覚が、予め設定された特定の(重要な)操舵感覚に該当するか否かを判別するためのグラフであり、当該判別グラフ74には、特定の操舵感覚に該当するか否かを判別するための閾値が予め設定されている。尚、上述の特定の操舵感覚は、操舵感覚A〜D(図7の(a))のいずれでもよいが、本実施例においては、特定の操舵感覚を操舵感覚Aとし、以下においては、これに従って説明を行う。
【0075】
判別グラフ74には、例えば、操舵トルクTの閾値α,β(一点鎖線部)と、微分指令値T1の閾値γ,δ(点線部)が設定されている。尚、これらの閾値α〜δは、車速Vに基づいて逐次変更される。
【0076】
ここで、判別グラフ74に対して、破線で示される操舵トルクTと、実線で示される微分指令値T1とが入力された場合、本実施例においては、例えば、操舵トルクTが、閾値αと閾値βの間の値であり、且つ、微分指令値T1が、閾値γと閾値δの間の値である場合、つまり、操舵トルクTと微分指令値T1が共に、図中の斜線部内の値である場合に、その時点における操舵感覚は操舵感覚Aであると判別する。
【0077】
以上のように、分類マップ71(図7の(a))と判別グラフ74(図10)により、操舵感覚がそれぞれ得られた場合、収斂ゲイン算出器25b(図9)では、例えば、図11に示す表75に従って、運転者が感じる操舵感覚の最終判定を行う。尚、最終判定結果(操舵感覚)は、それぞれ図11中の斜線部で示される部分である。
【0078】
詳しくは、(1)のように、分類マップ71による判定結果が操舵感覚Aであり、判別グラフ74による判別結果が操舵感覚Aである場合、最終的に判定される操舵感覚は、操舵感覚Aとなる。判別グラフ74による判別結果が操舵感覚Aでない場合、最終的に判定される操舵感覚は、分類マップ71が優先されて、操舵感覚Aとなる。
【0079】
(2)のように、分類マップ71による判定結果が、操舵感覚Aと操舵感覚Bとが重なる場合(図7の(a)の斜線部)に優先される操舵感覚Bであり、判別グラフ74による判別結果が操舵感覚Aである場合、最終的に判定される操舵感覚は、操舵感覚Aとなる。このときは、分類マップ71の操舵感覚の重なり部分に操舵感覚Aが含まれており、判別グラフ74による判別結果も操舵感覚Aであることから(操舵感覚の一致)、判別グラフ74による判別結果が優先される。判別グラフ74による判別結果が操舵感覚Aでない場合、最終的に判定される操舵感覚は、操舵感覚Bとなる。
【0080】
(3)のように、分類マップ71による判定結果が、操舵感覚Aと操舵感覚Bとが重ならない場合の操舵感覚Bであり、判別グラフ74による判別結果が操舵感覚Aである場合、最終的に判定される操舵感覚は、分類マップ71による判定結果が優先されて操舵感覚Bとなる。このときは、分類マップ71から得られる操舵感覚に、操舵感覚Aが含まれていないので、判別グラフ74による判別結果(操舵感覚A)は優先されない。判別グラフ74による判別結果が操舵感覚Aでない場合、最終的に判定される操舵感覚は、操舵感覚Bとなる。
【0081】
(4)のように、分類マップ71による判定結果が、操舵感覚Bと操舵感覚Cとが重なる場合(図7の(a)の灰色部)に優先される操舵感覚Bであり、判別グラフ74による判別結果が操舵感覚Aである場合、最終的に判定される操舵感覚は、分類マップ71による判定結果が優先されて操舵感覚Bとなる。このときは、分類マップ71の操舵感覚の重なり部分に操舵感覚Aは含まれないため、判別グラフ74による判別結果(操舵感覚A)は優先されない。判別グラフ74による判別結果が操舵感覚Aでない場合、最終的に判定される操舵感覚は、操舵感覚Bとなる。
【0082】
(5)のように、分類マップ71による判定結果が、操舵感覚Bと操舵感覚Cとが重ならない場合の操舵感覚Cであり、判別グラフ74による判別結果が操舵感覚Aである場合、最終的に判定される操舵感覚は、分類マップ71による判定結果が優先されて操舵感覚Cとなる。このときは、(3)と同様の理由により、判別グラフ74による判別結果は優先されない。判別グラフ74による判別結果が操舵感覚Aでない場合、最終的に判定される操舵感覚は、操舵感覚Cとなる。
【0083】
(6)のように、分類マップ71による判定結果が操舵感覚Dであり、判別グラフ74による判別結果が操舵感覚Aである場合、最終的に判定される操舵感覚は、分類マップ71による判定結果が優先されて操舵感覚Dとなる。このときも、(3)と同様の理由により、判別グラフ74による判別結果は優先されない。判別グラフ74による判別結果が操舵感覚Aでない場合、最終的に判定される操舵感覚は、操舵感覚Dとなる。
【0084】
上記判定方法により、運転者が感じる操舵感覚を最終判定し、当該最終判定結果に係るIDに基づいて対応表72(図7の(b))を参照することで、ゲインGを算出する。
【0085】
収斂ゲイン算出器25b(図9)で算出されたゲインGは、乗算器32において収斂値ASと乗算され、当該乗算により算出された収斂指令値asは、減算器34に入力される。減算器34は、加算器33から出力された第3電流指令値I3から収斂指令値asを減算する。尚、第3電流指令値I3は、上述したとおり、第1電流指令値I1と第2電流指令値I2とに基づいて、加算器33で算出した値である。ここで、第1電流指令値I1は、前述した第1実施例と同様に、操舵トルクTと、車速Vとに基づいて、第1電流指令値算出器23で算出した値である。また、第2電流指令値I2は、前述した第1実施例と同様に、微分指令値T1と、微分ゲイン算出器22で算出した微分ゲインgとに基づいて、乗算器31で算出した値である。
【0086】
そして、減算器34は、第3電流指令値I3から収斂指令値asを減算して算出した駆動電流指令値Idを、モータ駆動部51に出力する。尚、駆動電流指令値Idに基づくモータ駆動部51の駆動方法については、前述の第1実施例と同様であるため、説明を省略する。
【0087】
このように、本実施形態の第2実施例において、ECU10(図9)は、前述した操舵感覚の判定方法(第1実施例)に加えて、各時点における操舵感覚が、予め設定された特定の(重要な)操舵感覚に該当するか否かを判別グラフ74(図10)により判別し、分類マップ71(図7の(a))による判定結果と判別グラフ74による判別結果に基づいて、操舵感覚を最終的に判定する。このため、分類マップ71において操舵感覚が重なる部分に該当する場合に、最適の操舵感覚を選択することが出来る。例えば、図11の(2)の場合は、分類マップ71に従えば、本来の操舵感覚はBであるが、判別グラフ74により操舵感覚がAと判別された場合は、BからAに補正されるため、操舵感覚が特定の操舵感覚Aと合致し、より最適なものとなる。こうして、分類マップ71と判別グラフ74とを用いることにより、運転者が感じている操舵感覚をより的確に特定することが出来る。
【0088】
よって、運転者が感じる操舵フィーリングの違和感を更に低減することができ、以って、ステアリング1(図1)の操舵フィーリングをより良好にすることが出来る。尚、その他の効果については、第1実施例と同様であるため、説明を省略する。
【0089】
次に、第3,4実施例について説明する。尚、後述する第3実施例は、図2に示すECU10(第1実施例)の変形例であり、第4実施例は、図9に示すECU10(第2実施例)の変形例である。
【0090】
また、第1実施例と第3実施例、第2実施例と第4実施例の各々においてECU10の機能ブロックに関する変更がないため、第3,第4実施例に係るECU10の機能ブロックについては、それぞれ、図2,図9を流用する。
【0091】
第3実施例においては、第1実施例と同様に、収斂ゲイン算出器25a(図2)にて、分類マップ71(図7の(a))による操舵感覚の判定を行う。
【0092】
しかしながら、本実施例においては、当該判定結果に変化が生じた場合、つまり、前回の判定結果と今回の判定結果が異なる場合は、前回の判定結果を優先し、今回の判定結果は適用しない。尚、前回の判定結果は、本発明における第1判定結果の一例であり、今回の判定結果は、本発明における第2判定結果の一例である。
【0093】
そして、今回の判定結果と同様の判定結果が、今回以降、連続して所定回数得られた場合にのみ、所定回数得られた判定結果を適用して、操舵感覚の変更を行い、連続して所定回数得られない場合は、操舵感覚の変更を行わない。
【0094】
詳しくは、分類マップ71(図7の(a))に基づく判定結果が、前回は操舵感覚Aであり、今回は操舵感覚Bである場合、前回の判定結果である操舵感覚を優先し、今回の判定結果である操舵感覚Bは適用しない。
【0095】
そして、当該操舵感覚Bが、今回以降、連続して所定回数(例えば、10回)得られた場合は、判定結果を操舵感覚Aから操舵感覚Bに変更し、連続して所定回数(例えば、10回)得られない場合は、判定結果を操舵感覚Aのままとする。
【0096】
ここで、上述の今回の判定結果と同様の判定結果が、今回以降、連続して所定回数(例えば、10回)得られない場合の一例としては、まず、操舵感覚Aと判定され、次に、操舵感覚Bと判定され、これ以降、所定回数未満(例えば、8回)操舵感覚Bと判定された後、操舵感覚Aまたは操舵感覚Cと判定される場合や、まず、操舵感覚Aが判定され、次に、操舵感覚B、操舵感覚Cの順に判定された後、操舵感覚A,B,Cの順に繰り返し判定が行われる場合等がある。
【0097】
以上のような判定方法は、第4実施例において、収斂ゲイン算出器25b(図9)でも行われるため、当該収斂ゲイン算出器25bにおける説明を省略する。
【0098】
このように、本実施形態の第3,第4実施例において、各ECU10は、前述したそれぞれの操舵感覚の判定方法(第1〜第4実施例)に加えて、同一の判定結果(操舵感覚)が、連続して所定回数得られたか否かを逐次検証する。そして、検証の結果、連続して所定回数得られた判定結果である場合は、当該判定結果を適用して操舵感覚を変更し、連続して所定回数得られていない判定結果である場合は、当該判定結果を不適用とし、操舵感覚を変更しない。このため、判定結果が頻繁に変わる場合においても、当該判定結果に基づいて操舵感覚が頻繁に変更されることを抑制することが出来る。
【0099】
これにより、運転者が感じる操舵フィーリングの違和感を更に低減することができ、以って、ステアリング1(図1)の操舵フィーリングをより良好にすることが出来る。尚、その他の効果については、第1,第2実施例と同様であるため、説明を省略する。
【0100】
最後に、図12に示す第5実施例、図13に示す第6実施例について説明する。
【0101】
図12に示すECU10(第5実施例)は、図2に示すECU10(第1実施例)の他の変形例であり、収斂ゲイン算出器25aと乗算器32との間に、更に、フィルタ71を設けている。
【0102】
同様に、図13に示すECU10(第6実施例)は、図9に示すECU10(第2実施例)の他の変形例であり、収斂ゲイン算出器25bと乗算器32との間に、更に、フィルタ71を設けている。
【0103】
ここで、上述したフィルタ71は、例えば、LPF(Low Pass Filter)から構成されている。そして、各実施例(第1,第2実施例)において、収斂ゲイン算出器(25a,25b)から出力されたゲインGは、フィルタ71を介して、乗算器32に入力する。尚、フィルタ71は、本発明におけるフィルタ手段の一実施形態である。
【0104】
このように、本実施形態の第5,第6実施例において、各ECU10は、前述したそれぞれの操舵感覚の判定方法(第1,第2実施例)に加えて、或る操舵感覚(例えば、操舵感覚A)から他の操舵感覚(例えば、操舵感覚B)に変更された場合に、当該変更に対応して各収斂ゲイン算出器25a,25bから出力されたゲインGを、フィルタ71を介して、乗算器32に入力している。このため、ゲインの変化を滑らかにするフィルタ71の作用により、操舵感覚の変更に基づくゲインGの急激な変化を抑制することが出来る。
【0105】
これにより、モータ駆動部51(図8)に出力される駆動電流指令値Idの急激な変化を抑制することが出来るため、操舵感覚の切り替えの際に、操舵手が操舵フィーリングの違和感を感じないようにすることが出来る。尚、その他の効果については、第1,第2実施例と同様であるため、説明を省略する。
【0106】
本発明では、以上述べた以外にも種々の実施形態を採用することができる。例えば、上記実施形態の全実施例(第1〜第6実施例)では、微分ゲイン算出器22(例えば、図2)に、車速Vによって異なる3種類の微分ゲイン曲線(図3)を予め記憶したが、これに限られず、車速Vを更に細かく設定して、車速V毎の微分ゲイン曲線を更に多種類記憶してもよい。
【0107】
また、上記実施形態の全実施例では、微分ゲイン曲線(図3)において、車速VがV0である場合の微分ゲインgを、操舵トルクTの値に関わらず一定の値とし、車速VがV1である場合の微分ゲインgを、操舵トルクTの値が大きくなるにつれて小さくなる値とし、同様に、車速VがV2である場合の微分ゲインgを、操舵トルクTの値が大きくなるにつれて小さくなる値としたが、これに限られず、全車速V(V0,V1,V2)において、操舵トルクTの値に関わらず一定で、それぞれ値の異なる微分ゲインgとしてもよい。また、車速VがV0である場合の微分ゲインgを、操舵トルクTの値が大きくなるにつれて小さくなる値としてもよい。さらに、車速VがV0の場合の微分ゲインgよりも、車速VがV1もしくはV2の場合の微分ゲインgのほうが大きくなるような操舵トルクTの値(領域)があってもよい。
【0108】
また、上記実施形態の全実施例では、第1電流指令値算出器23(例えば、図2)に、車速Vによって異なる3種類の第1電流指令値曲線(図4)を予め記憶したが、これに限られず、車速Vを更に細かく設定して、車速V毎の第1電流指令値曲線を更に多種類記憶してもよい。
【0109】
また、上記実施形態の全実施例では、ステアリング1の回転方向に関係なく操舵トルクTを正の値として、当該操舵トルクTの値と車速V毎の第1電流指令値曲線とから第1電流指令値I1を算出したが(図4)、これに限られず、ステアリング1の回転方向が右方向である場合の操舵トルクTを正の値とし、左方向である場合の操舵トルクTを負の値として、当該操舵トルクTの値と車速V毎の第1電流指令値曲線とから第1電流指令値I1を算出してもよい。
【0110】
尚、この場合、ステアリング1の回転方向が左方向である場合の各所定値T0、T1、T2の大小関係は、T0≧T1≧T2となり、T0<0となる。また、第1電流指令値曲線は、図4に示す曲線と当該曲線を原点(T=0,I1=0である点)中心に180°回転させた曲線(図示省略)とが連続する曲線(図示省略)となるため、操舵トルクTが負の値である場合、第1電流指令値I1は、負の値となる。
【0111】
また、上記実施形態の全実施例では、車速V毎の第1電流指令値曲線(図4)において、第1電流指令値I1が飽和状態となる操舵トルクTをそれぞれ所定値T0、T1、T2とし、これら所定値T0、T1、T2の関係を、T0≦T1≦T2としたが、これに限られず、T2≦T0≦T1としてもよい。つまり、所定値T0、T1、T2の大小関係について、特に制約を設けなくてもよい。
【0112】
また、上記実施形態の全実施例では、車速V毎の第1電流指令値曲線(図4)において、第1電流指令値I1の飽和値が、車速V毎に異なったが、これに限られず、車速毎に異ならない値としてもよい。つまり、所定値T0、T1における第1電流指令値I1が同一となるようにしてもよいし、所定値T0、T2における第1電流指令値I1が同一となるようにしてもよい。同様に、所定値T1、T2における第1電流指令値I1が同一となるようにしてもよいし、所定値T0、T1、T2における第1電流指令値I1が同一となるようにしてもよい。
【0113】
また、上記実施形態の全実施例では、分類マップ71(図7の(a))を、操舵感覚A〜Dの4種類の操舵感覚が分布している分類マップとしたが、これに限られず、更に多種類の操舵感覚が分布している分類マップとしてもよい。
【0114】
尚、この場合、各収斂ゲイン算出器25a,25bには、分類マップ71での判定結果に係るIDとゲイン値(ゲインG)とが対応付けられている対応表72(図7の(b))も予め記憶されているため、分類マップ71における操舵感覚の種類増加に伴って、当該分類マップ71での判定結果(操舵感覚)に係るIDも増加する必要があり、また、当該IDに対応するゲイン値(ゲインG)も設定する必要がある。
【0115】
また、上記実施形態の全実施例では、分類マップ71(図7の(a))において、操舵感覚Aと操舵感覚Bとが重なる部分(斜線部)の操舵感覚を判定する場合は、操舵感覚Bを判定結果として優先的に適用し、操舵感覚Bと操舵感覚Cとが重なる部分(灰色部)の操舵感覚を判定する場合は、操舵感覚Bを判定結果として優先的に適用したが、これに限られず、例えば、操舵感覚Aと操舵感覚Bとが重なる部分(斜線部)の操舵感覚を判定する場合は、操舵感覚Aを判定結果として優先的に適用してもよい。つまり、各操舵感覚の重なり部分において、操舵感覚の優先順位は、任意に選定することが出来る。
【0116】
また、上記実施形態の第2,第4,第6実施例では、収斂ゲイン算出器25bに予め記憶された判別グラフ74(図10)における特定の(重要な)操舵感覚を操舵感覚Aとしたが、これに限られず、操舵感覚Bや、操舵感覚Cを特定の操舵感覚としてもよい。
【0117】
また、上記実施形態の第2,第4,第6実施例において、判別グラフ74(図10)に、操舵トルクTの閾値α,βと、微分指令値T1の閾値γ,δを設定し、操舵トルクTが、閾値αと閾値βの間の値であり、且つ、微分指令値T1が、閾値γと閾値δの間の値である場合に、予め設定された特定の操舵感覚(例えば、操舵感覚A)に該当すると判定したが、これに限られず、例えば、操舵トルクTが、閾値αと閾値βの間の値であり、且つ、微分指令値T1が、閾値γと閾値δの間の値でない場合に、特定の操舵感覚(例えば、操舵感覚A)に該当すると判定してもよい。
【0118】
また、特定の操舵感覚に該当する条件として、これ以外に、例えば、操舵トルクTが、閾値αと閾値βの間の値でなく、且つ、微分指令値T1が、閾値γと閾値δの間の値である場合としてもよく、操舵トルクTが、閾値αと閾値βの間の値でなく、且つ、微分指令値T1が、閾値γと閾値δの間の値でない場合としてもよい。
【0119】
また、上記実施形態の全実施例では、角速度センサ12を用いて角速度(回転操作速度)を求めたが、これに限られず、ステアリング1の回転量を検出するセンサ(図示省略)や、モータ15の回転速度を検出するモータ回転センサ14等の出力値から角速度を推定するようにしても良い。
【0120】
また、上記実施形態の全実施例において、モータ15をブラシモータとしたが、これに限られず、ブラシレスモータとしてもよい。
【0121】
さらに、上記実施形態では、電動式パワーステアリングシステム100を、車両(例えば、自動車)に搭載したが、これに限られず、ステアリング1を備えるものであればよく、例えば、船舶や航空機等に搭載してもよい。
【図面の簡単な説明】
【0122】
【図1】電動式パワーステアリングシステムを示す図である。
【図2】ECUの機能ブロックを示す図である。
【図3】微分ゲイン曲線を示す図である。
【図4】第1電流指令値曲線を示す図である。
【図5】第1粘性値曲線を示す図である。
【図6】第2粘性値曲線を示す図である。
【図7】分類マップと対応表を示す図である。
【図8】モータ駆動部を示す図である。
【図9】ECUの機能ブロックの他の実施例を示す図である。
【図10】判別グラフを示す図である。
【図11】最終判定を行うための表を示す図である。
【図12】ECUの機能ブロックの他の実施例を示す図である。
【図13】ECUの機能ブロックの他の実施例を示す図である。
【符号の説明】
【0123】
1 ステアリング(操舵機構)
10 ECU
11 トルクセンサ
12 角速度センサ
13 車速センサ
14 モータ回転センサ
15 モータ
21 微分指令値算出器
22 微分ゲイン算出器
23 第1電流指令値算出器
24 収斂値算出器
25a、25b 収斂ゲイン算出器
31、32 乗算器
33 加算器
34 減算器
51 モータ駆動部
71 分類マップ
72 対応表
74 特定感覚判別グラフ
【特許請求の範囲】
【請求項1】
車両が有する操舵機構の操舵トルクを入力する操舵トルク入力手段と、
前記操舵機構の回転角速度を入力する角速度入力手段と、
前記車両の車速を入力する車速入力手段と、
前記操舵機構に補助力を与えるモータの回転速度を入力する回転速度入力手段と、
前記操舵トルク入力手段、前記角速度入力手段、前記車速入力手段、および前記回転速度入力手段からの入力に基づいて、前記モータを駆動するための駆動電流指令値を出力する駆動電流指令値出力手段と、
を備えた電動式パワーステアリング制御装置において、
前記駆動電流指令値出力手段は、
前記操舵トルクを微分して微分指令値を算出する微分指令値算出手段と、
前記操舵トルクと前記車速とに基づいて前記微分指令値に対するゲインである微分ゲインを算出する微分ゲイン算出手段と、
前記操舵トルクと前記車速とに基づいて第1電流指令値を算出する第1電流指令値算出手段と、
前記車速と前記回転速度とに基づいて収斂値を算出する収斂値算出手段と、
前記操舵トルクと前記回転角速度とに基づいて前記操舵機構の操舵感覚を判定し、当該判定結果に基づいて前記収斂値に対するゲインである収斂ゲインを算出する収斂ゲイン算出手段と、
前記微分指令値と前記微分ゲインとを乗算して第2電流指令値を算出する第2電流指令値算出手段と、
前記収斂値と前記収斂ゲインとを乗算して収斂指令値を算出する収斂指令値算出手段と、
前記第1電流指令値と前記第2電流指令値とを加算して第3電流指令値を算出する第3電流指令値算出手段と、
前記第3電流指令値から前記収斂指令値を減算して前記駆動電流指令値を算出する駆動電流指令値算出手段と、
を有することを特徴とする電動式パワーステアリング制御装置。
【請求項2】
請求項1に記載の電動式パワーステアリング制御装置において、
前記収斂ゲイン算出手段は、前記操舵トルクと前記回転角速度とに基づいて分類された複数の操舵感覚の中から、各操舵トルクおよび回転角速度に対応する操舵感覚を判定する第1判定手段と、前記第1判定手段による判定結果に基づいて当該判定結果に対応する前記収斂ゲインを決定する収斂ゲイン決定手段とを有することを特徴とする電動式パワーステアリング制御装置。
【請求項3】
請求項2に記載の電動式パワーステアリング制御装置において、
前記第1判定手段は、前記操舵トルクおよび前記回転角速度に対応する操舵感覚が複数ある場合は、予め決められた優先順位に従って、当該複数の操舵感覚の内のいずれかの操舵感覚を判定結果とすることを特徴とする電動式パワーステアリング制御装置。
【請求項4】
請求項3に記載の電動式パワーステアリング制御装置において、
前記収斂ゲイン算出手段は、前記操舵トルクと前記微分指令値と前記車速とに基づいて、前記操舵機構の操舵感覚が、特定の操舵感覚に該当するか否かを判定する第2判定手段を有し、
前記第2判定手段による判定結果が該当有の場合は、前記第1判定手段によって判定された操舵感覚が複数あるか否かを検証し、当該操舵感覚が複数ある場合は、前記第2判定手段による前記特定の操舵感覚が、前記第1判定手段による前記複数の操舵感覚のいずれかと一致するか否かを検証し、一致する操舵感覚がある場合は、当該一致する操舵感覚を前記操舵機構の操舵感覚として判定することを特徴とする電動式パワーステアリング制御装置。
【請求項5】
請求項2〜4のいずれかに記載の電動式パワーステアリング制御装置において、
前記電流ゲイン算出手段は、
前記第1判定手段での判定結果である第1判定結果と、前記第1判定結果に続く判定結果である第2判定結果とが異ならない場合は、前記第2判定結果に基づいて前記操舵機構の操舵感覚を判定し、
前記第1判定結果と前記第2判定結果とが異なる場合であり、かつ、前記第2判定結果と同じ判定結果が、当該第2判定結果以降、連続して所定回数得られていない場合は、前記第1判定結果に基づいて前記操舵機構の操舵感覚を判定し、
前記第1判定結果と前記第2判定結果とが異なる場合であり、かつ、前記第2判定結果と同じ判定結果が、当該第2判定結果以降、連続して所定回数得られた場合は、前記第2判定結果に基づいて前記操舵機構の操舵感覚を判定することを特徴とする電動式パワーステアリング制御装置。
【請求項6】
請求項1〜5のいずれかに記載の電動式パワーステアリング制御装置において、
前記収斂ゲイン算出手段と前記収斂指令値算出手段との間に、当該収斂ゲイン算出手段から出力される前記収斂ゲインの変化を滑らかにするフィルタ手段を設けたことを特徴とする電動式パワーステアリング制御装置。
【請求項1】
車両が有する操舵機構の操舵トルクを入力する操舵トルク入力手段と、
前記操舵機構の回転角速度を入力する角速度入力手段と、
前記車両の車速を入力する車速入力手段と、
前記操舵機構に補助力を与えるモータの回転速度を入力する回転速度入力手段と、
前記操舵トルク入力手段、前記角速度入力手段、前記車速入力手段、および前記回転速度入力手段からの入力に基づいて、前記モータを駆動するための駆動電流指令値を出力する駆動電流指令値出力手段と、
を備えた電動式パワーステアリング制御装置において、
前記駆動電流指令値出力手段は、
前記操舵トルクを微分して微分指令値を算出する微分指令値算出手段と、
前記操舵トルクと前記車速とに基づいて前記微分指令値に対するゲインである微分ゲインを算出する微分ゲイン算出手段と、
前記操舵トルクと前記車速とに基づいて第1電流指令値を算出する第1電流指令値算出手段と、
前記車速と前記回転速度とに基づいて収斂値を算出する収斂値算出手段と、
前記操舵トルクと前記回転角速度とに基づいて前記操舵機構の操舵感覚を判定し、当該判定結果に基づいて前記収斂値に対するゲインである収斂ゲインを算出する収斂ゲイン算出手段と、
前記微分指令値と前記微分ゲインとを乗算して第2電流指令値を算出する第2電流指令値算出手段と、
前記収斂値と前記収斂ゲインとを乗算して収斂指令値を算出する収斂指令値算出手段と、
前記第1電流指令値と前記第2電流指令値とを加算して第3電流指令値を算出する第3電流指令値算出手段と、
前記第3電流指令値から前記収斂指令値を減算して前記駆動電流指令値を算出する駆動電流指令値算出手段と、
を有することを特徴とする電動式パワーステアリング制御装置。
【請求項2】
請求項1に記載の電動式パワーステアリング制御装置において、
前記収斂ゲイン算出手段は、前記操舵トルクと前記回転角速度とに基づいて分類された複数の操舵感覚の中から、各操舵トルクおよび回転角速度に対応する操舵感覚を判定する第1判定手段と、前記第1判定手段による判定結果に基づいて当該判定結果に対応する前記収斂ゲインを決定する収斂ゲイン決定手段とを有することを特徴とする電動式パワーステアリング制御装置。
【請求項3】
請求項2に記載の電動式パワーステアリング制御装置において、
前記第1判定手段は、前記操舵トルクおよび前記回転角速度に対応する操舵感覚が複数ある場合は、予め決められた優先順位に従って、当該複数の操舵感覚の内のいずれかの操舵感覚を判定結果とすることを特徴とする電動式パワーステアリング制御装置。
【請求項4】
請求項3に記載の電動式パワーステアリング制御装置において、
前記収斂ゲイン算出手段は、前記操舵トルクと前記微分指令値と前記車速とに基づいて、前記操舵機構の操舵感覚が、特定の操舵感覚に該当するか否かを判定する第2判定手段を有し、
前記第2判定手段による判定結果が該当有の場合は、前記第1判定手段によって判定された操舵感覚が複数あるか否かを検証し、当該操舵感覚が複数ある場合は、前記第2判定手段による前記特定の操舵感覚が、前記第1判定手段による前記複数の操舵感覚のいずれかと一致するか否かを検証し、一致する操舵感覚がある場合は、当該一致する操舵感覚を前記操舵機構の操舵感覚として判定することを特徴とする電動式パワーステアリング制御装置。
【請求項5】
請求項2〜4のいずれかに記載の電動式パワーステアリング制御装置において、
前記電流ゲイン算出手段は、
前記第1判定手段での判定結果である第1判定結果と、前記第1判定結果に続く判定結果である第2判定結果とが異ならない場合は、前記第2判定結果に基づいて前記操舵機構の操舵感覚を判定し、
前記第1判定結果と前記第2判定結果とが異なる場合であり、かつ、前記第2判定結果と同じ判定結果が、当該第2判定結果以降、連続して所定回数得られていない場合は、前記第1判定結果に基づいて前記操舵機構の操舵感覚を判定し、
前記第1判定結果と前記第2判定結果とが異なる場合であり、かつ、前記第2判定結果と同じ判定結果が、当該第2判定結果以降、連続して所定回数得られた場合は、前記第2判定結果に基づいて前記操舵機構の操舵感覚を判定することを特徴とする電動式パワーステアリング制御装置。
【請求項6】
請求項1〜5のいずれかに記載の電動式パワーステアリング制御装置において、
前記収斂ゲイン算出手段と前記収斂指令値算出手段との間に、当該収斂ゲイン算出手段から出力される前記収斂ゲインの変化を滑らかにするフィルタ手段を設けたことを特徴とする電動式パワーステアリング制御装置。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−111254(P2010−111254A)
【公開日】平成22年5月20日(2010.5.20)
【国際特許分類】
【出願番号】特願2008−285188(P2008−285188)
【出願日】平成20年11月6日(2008.11.6)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成22年5月20日(2010.5.20)
【国際特許分類】
【出願日】平成20年11月6日(2008.11.6)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]