
電子制御装置
【課題】車両が走行する道路状況に応じて運転情報を適切に記憶する電子制御装置を提供する。
【解決手段】電子制御装置は、判定条件を満たす車両挙動が発生した場合に運転情報を記憶する処理を行う場合、車両が走行している道路状況に対応して判定条件のスロットル開度閾値、継続時間閾値を基準閾値に基づいて設定する。電子制御装置は、道路状況が未舗装道路であるか(S410:Yes)、傾斜角度が+5°より大きい上り坂の道路状況の場合(S426:Yes)、スロットル開度閾値および継続時間閾値を基準閾値よりも大きくして車両の加速状態が判定条件を満たしにくくし、カーブまでの距離が50m未満の道路状況であるか(S416:Yes)、道路状況が傾斜角度が−5°より小さい下り坂の場合(S422:Yes)、スロットル開度閾値、継続時間閾値を減算して車両の加速状態が判定条件を満たしやすくする。
【解決手段】電子制御装置は、判定条件を満たす車両挙動が発生した場合に運転情報を記憶する処理を行う場合、車両が走行している道路状況に対応して判定条件のスロットル開度閾値、継続時間閾値を基準閾値に基づいて設定する。電子制御装置は、道路状況が未舗装道路であるか(S410:Yes)、傾斜角度が+5°より大きい上り坂の道路状況の場合(S426:Yes)、スロットル開度閾値および継続時間閾値を基準閾値よりも大きくして車両の加速状態が判定条件を満たしにくくし、カーブまでの距離が50m未満の道路状況であるか(S416:Yes)、道路状況が傾斜角度が−5°より小さい下り坂の場合(S422:Yes)、スロットル開度閾値、継続時間閾値を減算して車両の加速状態が判定条件を満たしやすくする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、判定条件を満たす車両挙動が発生すると車両の所定の運転情報を記憶する電子制御装置に関する。
【背景技術】
【0002】
従来、特許文献1に開示されているように、車両に搭載された各種センサの検出信号から車両挙動を診断し、解析する技術が知られている。また、衝突等により車両に衝撃が加わったときに、衝突前後の各種センサの出力情報を車両走行情報として記憶する技術が公知である。
【0003】
また、センサやアクチュエータに異常が発生した場合には、異常状態に対応したダイアグコードと、そのときの時間軸に沿ったセンサ出力や制御データを運転情報(フリーズフレームデータ)として記憶することが行われている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第5754965号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ダイアグコードおよびフリーズフレームデータはセンサやアクチュエータ等に異常が発生したときに記憶されるので、例えば、センサおよびアクチュエータに異常は発生しておらず正常であるが、運転者の運転操作に対応しない車両挙動が発生したときには、そのときの運転情報は記憶されない。その結果、運転者の運転操作に対応しない車両挙動が発生したために運転者が違和感を感じても、その原因を車両の運転情報に基づいて解析できないという問題がある。
【0006】
そこで、例えば運転者の運転操作に対応しない車両挙動を検出するための判定条件を設定し、車両挙動が判定条件を満たす場合に運転情報を記憶することが考えられる。これにより、記憶された運転情報に基づいて、運転者の運転操作に対応しない車両挙動が発生した原因を解析できる。
【0007】
しかしながら、運転者が運転操作に対応しない車両挙動であると感じる違和感は、車両が走行する道路状況、例えば道路が真っ直ぐであるか曲がっているか、道路上か駐車場かによって異なる場合がある。したがって、判定条件を規定する閾値が固定であると、運転者が違和感を感じる車両挙動であっても判定条件を満たさず、運転情報を記憶できないおそれがある。
【0008】
また、判定条件を規定する閾値が固定であると、運転者が違和感を感じない車両挙動であっても判定条件を満たすために、運転者が違和感を感じない車両挙動の運転情報を記憶することがある。その結果、運転情報の記憶量が増えると、記憶容量の制限のために違和感を感じた車両挙動の運転情報が上書きされるおそれがある。
【0009】
本発明は、上記課題を解決するためになされたものであり、車両が走行する道路状況に応じて運転情報を適切に記憶する電子制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
請求項1から15に記載の発明によると、判定条件を満たす車両挙動が発生すると車両の所定の運転情報を記憶する電子制御装置において、閾値取得手段は車両が走行する道路状況に対応する判定条件を規定する異なる閾値を取得し、挙動判定手段は閾値取得手段が取得する閾値により規定される判定条件を車両挙動が満たすか否かを判定する。
【0011】
この構成によれば、道路状況に対応して判定条件を規定する適切な閾値が取得されるので、判定条件を規定する閾値が変化せず固定の場合に比べ、道路状況によって車両挙動が過度に判定条件を満たしたり、満たさなかったりすることを防止できる。
【0012】
そして、記憶手段は、閾値取得手段が取得する閾値により規定される判定条件を車両挙動が満たすと挙動判定手段が判定すると、運転情報を記憶部に記憶する。
このように、道路状況に応じた閾値により規定される判定条件を車両挙動が満たす場合に運転情報を記憶するので、道路状況に応じて適切な運転情報を記憶できる。これにより、運転者が違和感を感じる車両挙動であっても判定条件を満たさないために運転情報が記憶されないこと、ならびに運転者が違和感を感じない車両挙動であっても判定条件を満たすために運転情報が記憶されることを極力防止できる。
【0013】
請求項2に記載の発明によると、道路状況取得手段は、自車両に搭載されたナビゲーション装置から道路状況を取得する。
これにより、自車両がナビゲーション装置を搭載している場合には、車両に搭載されたナビゲーション装置の機能を利用して車両が走行する道路状況を取得できる。
【0014】
請求項3に記載の発明によると、閾値取得手段は、自車両の車種と道路状況取得手段がナビゲーション装置から取得する道路状況とをリモート基地局に送信し、リモート基地局から道路状況および車種に対応する閾値を受信して取得する。
【0015】
これにより、道路状況および車種に対応して、自車両内で取得する閾値とは値が異なる閾値をリモート基地局から取得できる。例えば、該当車種の発売開始後から一定期間に合わせて通常とは異なる判定条件を満たす車両挙動が発生するときの運転情報を記憶したい場合、あるいは該当車種で予期せぬ異常な車両挙動が発生してユーザからのクレームが頻発するために特定の異常挙動が発生するときの運転情報を記憶したい場合、これら条件に合わせてリモート基地局で設定された閾値をリモート基地局から取得できる。
【0016】
このように、自車両内で取得する閾値とは値が異なる閾値を取得しようとすると、車両をディーラ等に持ち込み書き込みツール等で閾値を変更する必要があるが、リモート基地局から閾値を取得するので、ディーラ等に車両を持ち込むことなく、前述した条件に応じた閾値を取得できる。
【0017】
請求項4に記載の発明によると、道路状況取得手段は、自車両に搭載された位置検出装置から取得する自車両の位置をリモート基地局に送信し、リモート基地局から自車両の位置に対応する道路状況を受信して取得する。
【0018】
これにより、ナビゲーション装置の地図データが古かったり、車両位置に基づくナビゲーション装置の道路状況の認識精度が低かったり、ナビゲーション装置に道路状況を出力する機能がなかったりするために、適切な道路状況をナビゲーション装置から取得できない場合にも、自車両からリモート基地局に送信する車両位置に対応して、リモート基地局から適切な道路状況を取得することができる。
【0019】
ところで、車両の進行方向前方で道路が分岐している場合、運転者が分岐前に行う運転操作は、車両が分岐先のいずれかの道路に進入することを前提とした運転操作であること
が一般的である。したがって、分岐前の運転操作が分岐先のいずれの道路状況を前提としているかは、分岐先のいずれかの道路に車両が進入するまで確定しない。
【0020】
そこで、請求項5に記載の発明によると、挙動判定手段は、閾値取得手段が取得する複数の異なる閾値によりそれぞれ規定される判定条件を車両挙動が満たすか否かを、車両が走行している道路状況に関わらず仮判定し、一時記憶手段は、複数の異なる閾値により規定される判定条件の少なくともいずれか一つを車両挙動が満たすと挙動判定手段が仮判定するときの運転情報を記憶部に一時的に記憶し、記憶手段は、挙動判定手段による仮判定後に、記憶部に一時的に記憶されている運転情報のうち、車両が実際に走行した道路状況に対応する運転情報を正式に記憶部に記憶する。
【0021】
この構成によれば、車両の進行方向前方の道路が分岐している場合に、閾値の異なる判定条件を車両挙動が満たすか否かを道路状況に関わらず予め判定しておくことにより、少なくともいずれか一つの判定条件を車両挙動が満たす場合に記憶部に一時的に記憶した運転情報から、車両が分岐先で実際に走行した道路状況に対応する適切な運転情報を選択し、正式な運転情報として記憶できる。
【0022】
請求項6に記載の発明によると、閾値取得手段は、道路状況に対応する閾値を算出する。
このように、閾値取得手段が道路状況に応じて自ら閾値を算出するので、電子制御装置は閾値を取得するために、自車両に搭載した自装置以外の装置または車両の外部と通信する必要がない。これにより、通信異常や低い通信性能により閾値の取得処理が妨げられることを防止できる。
【0023】
ところで、車両が減速操作されると推定される場合に車両が加速すると、車両が減速操作されると推定されない場合よりも低い加速で、運転者は違和感を感じやすいと考えられる。
【0024】
そこで、請求項7に記載の発明によると、閾値取得手段は、道路状況取得手段が取得する道路状況に基づいて車両が減速操作されると推定される場合、車両が減速操作されると推定されない場合に比べ、車両の加速状態が判定条件を満たしていると挙動判定手段が判定しやすくなる方向に閾値を設定する。
【0025】
これにより、車両が減速操作されると推定される場合に、低い加速であっても運転者が違和感を感じる車両の加速状態が発生すると、そのときの運転情報を記憶できる。
このように、車両が減速操作されると推定される道路状況として、請求項8に記載のカーブの手前、請求項9に記載の下り坂、請求項10に記載の公共駐車場などが考えられる。
【0026】
一方、車両が加速操作されると推定される場合、車両が加速操作されると推定されない場合に比べ、運転者は低い加速では違和感を感じにくいと考えられる。
そこで、請求項11に記載の発明によると、閾値取得手段は、道路状況取得手段が取得する道路状況に基づいて、車両が加速操作されると推定される場合、車両が加速操作されると推定されない場合に比べ、車両の加速状態が判定条件を満たしていると挙動判定手段が判定しにくくなる方向に閾値を設定する。
【0027】
これにより、車両が加速操作されると推定される場合、運転者が違和感を感じない低い加速のときに運転情報が記憶されることを防止できる。
このように、車両が加速操作されると推定される道路状況として、請求項12に記載の上り坂などが考えられる。
【0028】
ところで、道路状況によっては、車両挙動を検出するセンサ等の検出値が変動しやすいために、車両の加速状態が判定条件を満たしやすい場合がある。この場合には、運転者が運転操作に対する車両挙動に違和感を感じていないにも関わらずに加速状態が判定条件を満たし、不必要な運転情報が記憶されることになる。その結果、運転者が違和感を感じる車両挙動が発生したときに記憶された運転情報が、不必要な運転情報のために上書きされるおそれがある。
【0029】
そこで、請求項13に記載の発明によると、閾値取得手段は、道路状況取得手段が取得する道路状況に基づいて、車両の加速状態が判定条件を満たしやすいと推定される場合、判定条件を満たしやすいと推定されない場合に比べ、車両の加速状態が判定条件を満たしていると挙動判定手段が判定しにくくなる方向に閾値を設定する。
【0030】
これにより、車両の加速状態が判定条件を満たしやすい道路状況であっても、車両の加速状態が判定条件を満たしにくくなる。その結果、運転者が運転操作に対する車両挙動に違和感を感じていないにも関わらず、運転情報が記憶されることを防止できる。
【0031】
このように、車両の加速状態が判定条件を満たしやすいと推定される道路状況として、請求項14に記載の未舗装道路または工事中道路などが考えられる。未舗装道路または工事中道路のように路面の凹凸が大きい道路では、センサ等の検出値が変動しやすいために、車両の加速状態が判定条件を満たしやすくなると推定される。
【0032】
請求項15に記載の発明によると、閾値取得手段は、自車両に搭載された位置検出装置から取得する自車両の位置と自車両の車種とをリモート基地局に送信し、リモート基地局から自車両の位置に対応する道路状況と車種とに対応する閾値を受信して取得する。
【0033】
これにより、ナビゲーション装置の地図データが古かったり、ナビゲーション装置の道路状況の認識精度が低かったり、ナビゲーション装置に道路状況を出力する機能がなかったりするために、適切な道路状況をナビゲーション装置から取得できない場合にも、自車両からリモート基地局に送信する自車両位置に対応して、リモート基地局において適切な道路状況が検出される。
【0034】
さらに、道路状況と車種とに対応した、自車両で取得する閾値とは値が異なる閾値をリモート基地局から取得できる。例えば車両の発売開始後から一定期間に合わせて通常とは異なる判定条件を満たす車両挙動が発生するときの運転情報を記憶したい場合、あるいは該当車種で予期せぬ異常な車両挙動が発生してユーザからのクレームが頻発するために特定の異常挙動が発生するときの運転情報を記憶したい場合、これら条件に合わせてリモート基地局で設定された閾値をリモート基地局から取得できる。
【0035】
その結果、ディーラ等に車両を持ち込むことなく、前述した条件に応じた閾値を取得できる。
【図面の簡単な説明】
【0036】
【図1】(A)は第1実施形態による運転情報記憶システムを示すブロック図、(B)は第1実施形態の電子制御装置を示すブロック図。
【図2】第1実施形態の運転情報記憶処理のメイン処理を示すフローチャート。
【図3】第1実施形態の閾値算出・設定処理を示すフローチャート。
【図4】第1実施形態のトリガ判定処理を示すフローチャート。
【図5】(A)は第2実施形態による運転情報記憶システムを示すブロック図、(B)は第2実施形態の電子制御装置を示すブロック図。
【図6】(A)は第2実施形態の運転情報記憶処理のメイン処理を示すフローチャート、(B)は第2実施形態の道路状況設定処理を示すフローチャート。
【図7】(A)は第3実施形態による運転情報記憶システムを示すブロック図、(B)は第3実施形態の電子制御装置を示すブロック図。
【図8】(A)は第3施形態の運転情報記憶処理のメイン処理を示すフローチャート、(B)は第3実施形態の閾値設定処理を示すフローチャート。
【図9】(A)は第4実施形態による運転情報記憶システムを示すブロック図、(B)は第4施形態の電子制御装置を示すブロック図。
【図10】(A)は第4施形態の運転情報記憶処理のメイン処理を示すフローチャート、(B)は第4実施形態の閾値設定処理を示すフローチャート。
【図11】第5実施形態の運転情報記憶処理のメイン処理を示すフローチャート。
【図12】(A)は第5実施形態のトリガ判定処理1を示すフローチャート、(B)は第5実施形態のトリガ判定処理2を示すフローチャート。
【図13】(A)は第5実施形態の一時記憶処理1を示すフローチャート、(B)は第5実施形態の一時記憶処理2を示すフローチャート。
【図14】第5実施形態の運転情報記憶処理示すフローチャート。
【発明を実施するための形態】
【0037】
以下、本発明の実施形態を図に基づいて説明する。
[第1実施形態]
図1に、第1実施形態による車両の運転情報記憶システム10を示す。運転情報記憶システム10は、GPS(Global Positioning System)20、各種センサ30、ナビECU(Electronic Control Unit)40、運転情報記憶ECU50から構成されている。
【0038】
ナビECU40は、地図データとGPS20から取得する自車両の緯度、経度情報とに基づいて地図上の車両位置を求め、車両室内に設置されたディスプレイに地図および現在の車両位置を表示させる。そして、車両位置および車両の進行方向などに基づき、車両が走行中の道路状況を運転情報記憶ECU50に出力する。
【0039】
道路状況には、車両が道路を走行している場合には、カーブ等の道路の形状、勾配、幅、トンネルの存在、渋滞および事故の発生、故障車等の障害物の存在を含み、道路以外を走行しているのであれば公共駐車場などの走行場所、さらに凍結または霧等の気象条件も含まれる。
【0040】
運転情報記憶ECU50(以下、単にECU50とも言う。)は、図示しないCPU、ROM、RAM、SRAM(スタンバイRAM)、EEPROM等を有するマイクロコンピュータにより主に構成されている。SRAMは、車両の運転が停止してもバッテリから電力を供給されるので、記憶しているデータを保持する。
【0041】
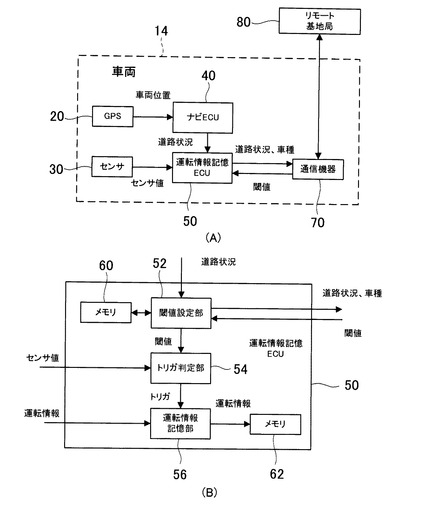
ECU50はROMに記憶された制御プログラムをCPUが実行することにより、閾値設定部52、トリガ判定部54、運転情報記憶部56として機能する。メモリ60はRAMおよびROMで構成されており、メモリ62はSRAMおよびEEPROMにより構成されている。
【0042】
閾値設定部52は、メモリ60を構成するROMから取得する基準閾値に基づき、例えばナビECU40から取得する道路状況に対応した、車両挙動と比較する判定条件の閾値を算出して設定する。
【0043】
トリガ判定部54は、センサ30の検出信号から車両挙動を検出し、検出した車両挙動が閾値設定部52で閾値を設定された判定条件を満たすか否かを判定することにより、所
定の運転情報を記憶するトリガが発生したか否かを判定する。車両挙動としては、アクセルオフ時においてスロットル開度から検出する車両の加速状態と、加速状態の継続時間等が考えられる。アクセルオフ時に車両が所定時間以上継続して加速状態になると、運転者は違和感を感じる。
【0044】
運転情報記憶部56は、車両挙動が判定条件を満たすとトリガ判定部54が判定することをトリガとし、所定の運転情報をEEPROMまたはSRAMから構成されるメモリ62に記憶する。
【0045】
メモリ62に記憶される所定の運転情報は、車両挙動が判定条件を満たすときの車両の運転状態を表わす情報であり、予めアクセル開度、スロットル開度、トランスミッションの変速位置、水温、吸気量、吸気温、エンジン回転数等が運転情報として設定されている。運転者が車両挙動に違和感を感じたときにディーラ等に車両を持ち込むと、メモリ62に記憶された運転情報が読み出され、判定条件を満たす車両挙動が発生した原因が解析される。
【0046】
(運転情報記憶処理)
次に、ECU50が閾値設定部52、トリガ判定部54、運転情報記憶部56として機能することにより実行される運転情報記憶処理について、図2〜図4に示すフローチャートに基づいて説明する。尚、図2〜図4、ならびに第1実施形態以外の他の実施形態のフローチャートにおいて、「S」はステップを表わしている。
【0047】
図2〜図4に示す運転情報記憶処理は、運転操作に対する車両挙動として運転者が違和感を感じる車両の加速状態が、道路状況に対応した異なる閾値により規定される判定条件を満たす場合に、運転情報を記憶する処理である。
【0048】
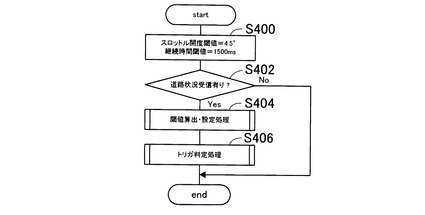
(メイン処理)
図2は、運転情報記憶処理のメイン処理を示すフローチャートであり、例えば100ms毎に実行される。
【0049】
まずECU50は、車両挙動が運転者の運転操作に対応しない異常挙動であるか否かを判定するための判定条件の基準閾値として、スロットル開度閾値=4.5°、継続時間閾値=1500msをメモリ60を構成するROMから読み出して取得する(S400)。継続時間閾値は、スロットル開度センサから検出するスロットル開度がスロットル開度閾値以上である状態が所定時間以上継続する車両挙動が発生したか否かを判定するための所定時間を表わす閾値である。
【0050】
そして、ECU50は、ナビECU40から道路状況を受信したか否かを判定する。ナビECU40は、例えば車両の走行道路がカーブ、坂など、直線道路が継続しないときに、車内LAN等で道路状況を送信する。カーブには、カーブの手前およびカーブ中が含まれる。道路状況を受信していない場合(S402:No)、ECU50は本処理を終了するので、運転情報はメモリ62に記憶されない。
【0051】
道路状況を受信すると(S402:Yes)、ECU50は、ナビECU40から取得した道路状況に基づいて、閾値算出・設定処理を行う(S404)。
ECU50は、S404で判定条件を規定する閾値が設定されると、閾値により規定される判定条件を満たす異常な車両挙動が発生したか否かを判定し、判定条件を満たす車両挙動が発生すると、所定の運転情報をメモリ62に記憶する(S406)。S404の閾値算出・設定処理、およびS406のトリガ判定処理の詳細については後述する。
【0052】
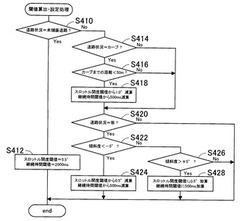
(閾値算出・設定処理)
図3の閾値算出・設定処理において、ECU50は、ナビECU40から受信して取得した道路状況が未舗装道路であるか否かを判定する(S410)。
【0053】
道路状況が未舗装道路のように路面に凹凸がある悪路の場合、スロットル開度を検出するスロットル開度センサの検出値が変動しやすいので、実際の加速状態よりも高い加速状態であると検出されるおそれがある。
【0054】
その結果、図2のS400で設定したスロットル開度閾値および継続時間閾値の基準閾値のままでは、アクセルオフ時において車両が加速状態であると判定されやすいと考えられる。すると、運転者がアクセルオフ時における加速状態に違和感を感じていないにも関わらず、運転情報が記憶されるおそれがある。
【0055】
そこで、道路状況が未舗装道路の場合(S410:Yes)、ECU50は、スロットル開度閾値、継続時間閾値を、それぞれ図2のS400で設定した基準閾値ではなく、スロットル開度閾値=5.5°、継続時間閾値=2000msに設定する(S412)。尚、未舗装道路のように路面に凹凸がある道路状況の悪路として、工事中道路を加えてもよい。
【0056】
スロットル開度閾値を基準閾値よりも増加し、継続時間閾値を基準閾値よりも長くすることにより、アクセルオフ時における車両の加速状態が判定条件を満たすか否かを判定するときに、加速状態が判定条件を満たしにくくなる方向にスロットル開度閾値および継続時間閾値が設定される。
【0057】
これにより、車両挙動として車両の加速状態を検出するスロットル開度センサの検出値が変動しやすいために、運転者がアクセルオフ時における加速状態に違和感を感じていないにも関わらず、加速状態が判定条件を満たし、運転情報が記憶されることを極力防止できる。したがって、運転者が実際に違和感を感じる車両挙動が発生したために記憶された運転情報が、運転者が違和感を感じない車両挙動のために上書きされることを防止できる。
【0058】
道路状況が未舗装道路ではない場合(S410:No)、ECU50は道路状況がカーブであるか否かを判定する(S414)。道路状況がカーブであることは、カーブの手前およびカーブ中であることの両方を含む。ECU40は、車両の前方にカーブが存在する場合、例えばカーブに進入する50m前から、道路状況としてカーブであることを送信する。道路状況がカーブではない場合(S414:No)、ECU50はS420に処理を移行する。
【0059】
道路状況がカーブである場合(S414:Yes)、ECU50は、カーブまでの距離が50m未満であるか否かを判定する(S416)。車両がカーブを走行中の場合、カーブまでの距離は0またはマイナスであると判断し、S416の判定は「Yes」となる。カーブまでの距離が50m以上の場合(S416:No)、ECU50はS420に処理を移行する。
【0060】
カーブまでの距離が50m未満の場合(S416:Yes)、ECU50は、スロットル開度閾値から1.0°を減算し、継続時間閾値から500msを減算する(S418)。これにより、スロットル開度閾値=3.5°、継続時間閾値=1000msに設定される。
【0061】
このように、カーブまでの距離が50m未満であり、運転者によりアクセルオフ、ブレ
ーキオン、シフトダウン等の減速操作がなされると推定される道路状況においては、低い加速であっても運転者は違和感を感じやすい。
【0062】
そこで、カーブの手前またはカーブ中のようにアクセルオフにより車両が減速操作されると推定される道路状況においてスロットル開度閾値および継続時間閾値を減算することにより、アクセルオフ時における車両の加速状態が判定条件を満たすか否かを判定するときに、加速状態が判定条件を満たしやすくなる方向に、スロットル開度閾値および継続時間閾値が設定される。
【0063】
これにより、低い加速であってもカーブの手前またはカーブ中であるために運転者が違和感を感じやすい道路状況にも関わらず、スロットル開度閾値および継続時間閾値が固定であるために車両挙動が判定条件を満たさず、運転情報が記憶されないことを極力防止できる。
【0064】
S420においてECU50は、道路状況が坂であるか否かを判定する。道路状況が坂ではない場合(S420:No)、ECU50は本処理を終了する。
道路状況が坂であり(S420:Yes)、傾斜角度が−5°より小さい下り坂の場合(S422:Yes)、ECU50は、スロットル開度閾値から0.5°を減算し、継続時間閾値から500msを減算する(S424)。
【0065】
このように、傾斜角度が−5°より急であり減速操作がなされると推定される下り坂の場合に、道路状況がカーブの手前50m未満の場合と同様にスロットル開度閾値および継続時間閾値を減算することにより、アクセルオフ時における車両の加速状態が判定条件を満たすか否かを判定するときに、加速状態が判定条件を満たしやすくなる方向に、スロットル開度閾値および継続時間閾値が設定される。
【0066】
これにより、低い加速であっても、傾斜角度が−5°より急な下り坂であるために運転者がアクセルオフ時における車両の加速状態に違和感を感じやすい道路状況にも関わらず、スロットル開度閾値および継続時間閾値が固定であるために車両挙動が判定条件を満たさず、運転情報が記憶されないことを極力防止できる。
【0067】
道路状況が坂であり(S420:Yes)、傾斜角度が−5°以上の場合(S422:No)、ECU50は、傾斜角度が+5°より大きい上り坂か否かを判定する(S426)。傾斜角度が+5°以下の場合(S426:No)、ECU50は本処理を終了する。
【0068】
傾斜角度が+5°より大きい場合(S426:Yes)、ECU50は、スロットル開度閾値に0.5°を加算し、継続時間閾値に500msを加算する(S428)。
このように、傾斜角度が+5°より急な上り坂であり、運転者によりアクセルを踏み込む加速操作がなされると推定される道路状況においては、アクセルをオフした状態でも低い加速であれば運転者は違和感を感じにくい。
【0069】
そこで、傾斜角度が+5°より大きい上り坂のように車両が加速操作されると推定される道路状況においてスロットル開度閾値および継続時間閾値を加算することにより、アクセルオフ時における車両の加速状態が判定条件を満たすか否かを判定するときに、加速状態が判定条件を満たしにくくなる方向に、スロットル開度閾値および継続時間閾値が設定される。
【0070】
これにより、低い加速であれば傾斜角度が+5°より急な上り坂であるために運転者が違和感を感じにくい道路状況にも関わらず、スロットル開度閾値および継続時間閾値が固定であるために車両挙動が判定条件を満たしやすくなり、運転情報が記憶されやすくなる
ことを極力防止できる。
【0071】
その結果、運転者が実際に違和感を感じる車両挙動が発生したために記憶された運転情報が、運転者が違和感を感じない車両挙動のために上書きされることを防止できる。
尚、図3の閾値算出・設定処理においてスロットル開度閾値および継続時間閾値が新たに設定されない場合、スロットル開度閾値および継続時間閾値は図2のメイン処理で設定される基準閾値のままである。
【0072】
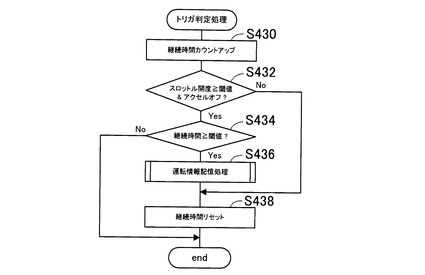
(トリガ判定処理)
図4のトリガ判定処理において、ECU50は、継続時間をカウントアップし(S430)、スロットル開度が図2のメイン処理または図3の閾値算出・設定処理で設定されたスロットル開度閾値以上かつアクセルオフであるか否かを判定する(S432)。ECU50は、スロットル開度がスロットル開度閾値以上かつアクセルオフであれば(S432:Yes)、S434に処理を移行し、スロットル開度がスロットル開度閾値未満またはアクセルオンであれば(S432:No)、S438に処理を移行する。
【0073】
S434においてECU50は、継続時間が図2のメイン処理または図3の閾値算出・設定処理で設定された継続時間閾値以上であるか否かを判定する。ECU50は、継続時間が継続時間閾値以上であれば(S434:Yes)、S436に処理を移行し、継続時間が継続時間閾値未満であれば(S434:No)、本処理を終了する。
【0074】
スロットル開度がスロットル開度閾値以上かつアクセルオフであり(S432:Yes)、その状態が継続時間閾値以上継続すると(S434:Yes)、S436においてECU50は、そのときの運転情報をメモリ62に記憶する。前述したように、メモリ62はSRAM、EEPROMで構成されているので、車両が走行を停止しても、記憶された運転情報は保持される。
【0075】
運転情報を記憶するメモリ62はリングバッファとして構成されており、車両挙動が判定条件を満たすときの所定回数分の運転情報が記憶される。所定回数を超えて車両挙動が判定条件を満たすと、最も古い運転情報が最新の運転情報により書換えられる。
【0076】
S438においてECU50は、継続時間をリセットし(S438)、本処理を終了する。
トリガ判定処理でメモリ62に記憶された運転情報は、運転操作に対応しない異常な車両挙動が発生して運転者が違和感を感じたためにディーラ等に車両が持ち込まれると、診断ツールによりメモリ62から読み出され、異常な車両挙動の発生原因が解析される。
【0077】
以上説明した第1実施形態では、未舗装道路、カーブ、坂の傾斜角度等の道路状況に対応して、スロットル開度閾値および継続時間閾値のように判定条件を規定する閾値を設定するので、道路状況に対応して適切な閾値を設定できる。
【0078】
これにより、判定条件を規定する閾値が固定の場合に比べ、道路状況によって車両挙動が過度に判定条件を満たしたり、満たさなかったりすることを防止できる。
そして、道路状況に対応した閾値により規定される判定条件を車両挙動が満たす場合に運転情報を記憶するので、運転者が違和感を感じる車両挙動であっても判定条件を満たさないために運転情報が記憶されないこと、ならびに運転者が違和感を感じない車両挙動であっても判定条件を満たすために運転情報が記憶されることを極力防止できる。
【0079】
また、第1実施形態では、ECU50は、自車両のナビECU40から道路状況を取得する。これにより、自車両に搭載されたナビECU40の機能を利用して、車両が走行す
る道路状況を取得できる。
【0080】
また、ECU50は、ナビECU40から取得する道路状況に基づいて、スロットル開度閾値および継続時間閾値を算出して設定するので、車両の外部と通信して閾値を取得する必要がない。これにより、通信異常や低い通信性能により閾値の設定処理が妨げられることを防止できる。
【0081】
第1実施形態では、ナビECU40が本発明のナビゲーション装置に相当し、ECU50が本発明の電子制御装置に相当し、メモリ62が本発明の記憶部に相当する。
そして、ECU50の閾値設定部52は本発明の道路状況取得手段および閾値取得手段として機能し、トリガ判定部54は本発明の挙動判定手段として機能し、運転情報記憶部56は本発明の記憶手段として機能する。
【0082】
また、図2のS400、ならびに図3のS412、S418、S424およびS428の処理が本発明の閾値取得手段が実行する機能に相当し、図2のS402の処理、ならびに図3のS410、S414、S416、S420、S422およびS426の判定で道路状況を参照する処理が本発明の道路状況取得手段が実行する機能に相当し、図4のS432およびS434の処理が本発明の挙動判定手段が実行する機能に相当し、図4のS436の処理が本発明の記憶手段が実行する機能に相当する。
【0083】
[第2実施形態]
図5に、第2実施形態による車両の運転情報記憶システム12を示す。運転情報記憶システム12は、第1実施形態の運転情報記憶システム10に対し、リモート基地局80と通信する通信機器70を備えている点で異なっている。
【0084】
ECU50は、ナビECU40から取得した自車両の位置を、車両を特定するVIN(Vehicle Identification Number)等の識別番号とともに通信機器70からリモート基地局80に送信し、リモート基地局80から車両位置に応じた道路状況を通信機器70により受信して取得する。
【0085】
リモート基地局80は、最新の地図データベースを備えており、地図データベースと車両から送信されてきた車両位置とに基づいて車両位置における道路状況を高精度に設定する機能を備えており、設定した道路状況を該当車両に送信する。
【0086】
次に、ECU50が実行する運転情報記憶処理と、リモート基地局80が実行する道路状況設定処理について、図6に基づいて説明する。
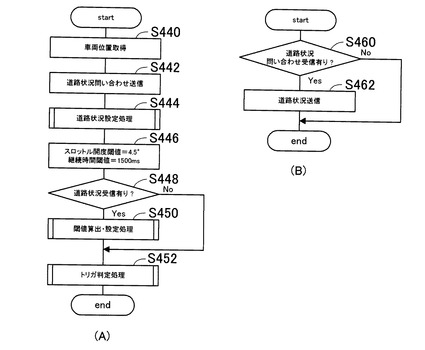
(運転情報記憶処理)
図6の(A)は、運転情報記憶処理のメイン処理を示すフローチャートであり、例えば100ms毎に実行される。
【0087】
まずECU50は、ナビECU40から車両位置を取得し(S440)、VINおよび車両位置を通信機器70からリモート基地局80に送信し、自車両が走行している道路状況を問い合わせる(S442)。
【0088】
S444は、車両からの道路状況の問い合わせに対しリモート基地局80が実行する道路状況設定処理であり、処理内容は後述する。
次に、ECU50は、スロットル開度閾値および車両挙動の継続時間閾値として、スロットル開度閾値=4.5°、継続時間閾値=1500msをメモリ60から読み出して取得し(S446)、リモート基地局80から道路状況を受信したか否かを判定する(S448)。
【0089】
通信異常等により、リモート基地局80から道路状況を受信できない場合(S448:No)、ECU50はS452を実行せずS454に処理を移行する。この場合、スロットル開度閾値および継続時間閾値は、S446で設定した値のままである。
【0090】
リモート基地局80から道路状況を受信できると(S448:Yes)、ECU50は、閾値算出・設定処理を実行し(S450)、トリガ判定処理を実行する(S452)。
S450の閾値算出・設定処理、およびS452のトリガ判定処理は、第1実施形態の図3および図4でそれぞれ実行される閾値算出・設定処理、トリガ判定処理と実質的に同一である。
【0091】
(道路状況設定処理)
図6の(B)は、リモート基地局80が実行する道路状況設定処理である。リモート基地局80は、車両位置を送信してくる車両から道路状況を問い合わせされると(S460:Yes)、受信した車両位置と地図データベースとに基づいて道路状況を設定し、設定した道路状況を該当車両に送信する(S462)。
【0092】
第2実施形態では、ナビECU40が参照する地図データが古かったり、ナビECU40が設定する道路状況の精度が低かったりするために、適切な道路状況をナビECU40から取得できない場合にも、自車両からリモート基地局80に送信する車両位置に基づいて、リモート基地局80から適切な道路状況を取得することができる。
【0093】
ナビECU40に道路状況を出力する機能がない場合にも、自車両からリモート基地局80に車両位置を送信することにより、リモート基地局80から適切な道路状況を取得することができる。
【0094】
第2実施形態では、GPS20およびナビECU40が本発明の位置検出装置に相当する。
また、第2実施形態において、図6のS440、S442およびS448において、ナビECU40から車両位置を取得し、取得した車両位置をリモート基地局80に送信してリモート基地局80から道路状況を受信する処理が本発明の道路状況取得手段が実行する機能に相当し、S446の処理およびS450において閾値を設定する処理が本発明の閾値取得手段が実行する機能に相当し、S452において車両挙動を判定条件と比較する処理が本発明の挙動判定手段が実行する機能に相当し、S452において運転情報をメモリ62に記憶する処理が本発明の記憶手段が実行する機能に相当する。
【0095】
[第3実施形態]
図7に、第3実施形態による車両の運転情報記憶システム14を示す。運転情報記憶システム14において、ECU50は、ナビECU40から道路状況を取得し、取得した道路状況と自車両の車種とVINとを通信機器70からリモート基地局80に送信し、リモート基地局80から道路状況および車種に応じた判定条件の閾値を通信機器70により受信して取得する。
【0096】
次に、ECU50が実行する運転情報記憶処理と、リモート基地局80が実行する閾値設定処理について、図8に基づいて説明する。
(運転情報記憶処理)
図8の(A)は、運転情報記憶処理のメイン処理を示すフローチャートであり、例えば100ms毎に実行される。
【0097】
まずECU50は、スロットル開度閾値および車両挙動の継続時間閾値として、スロッ
トル開度閾値=4.5°、継続時間閾値=1500msをメモリ60から読み出して取得し(S470)、ナビECU40から道路状況を受信したか否かを判定する(S472)。
【0098】
第1実施形態で述べたように、ナビECU40は、車両の走行道路がカーブ、坂など、直線道路が継続しないときに、車内LAN等で道路状況を送信する。ナビECU40から道路状況を受信していない場合(S472:No)、ECU50はS482に処理を移行する。
【0099】
ナビECU40から道路状況を受信している場合(S472:Yes)、ECU50は、道路状況と自車両の車種とVINとを通信機器70からリモート基地局80に送信し、道路状況および車種に対応した判定条件の閾値を問い合わせる(S474)。
【0100】
S476は、車両からの閾値の問い合わせに対しリモート基地局80が実行する閾値設定処理であり、処理内容は後述する。
次に、ECU50は、リモート基地局80から閾値を受信したか否かを判定する(S478)。通信異常等により、リモート基地局80から閾値を受信できない場合(S478:No)、ECU50はS482に処理を移行する。
【0101】
リモート基地局80から閾値を受信すると(S478:Yes)、ECU50は、リモート基地局80から受信した閾値を判定条件の閾値として設定する(S480)。
そして、S482においてECU50は、トリガ判定処理を実行する(S482)。S482のトリガ判定処理は、第1実施形態の図4で実行されるトリガ判定処理と実質的に同一である。
【0102】
(閾値設定処理)
図8の(B)は、リモート基地局80が実行する閾値設定処理である。リモート基地局80は、道路状況および車種を送信してくる車両から道路状況および車種に対応した閾値を問い合わせされると(S490:Yes)、受信した道路状況および車種に基づいて、閾値データベースから道路状況および車種に対応する閾値を取得し、該当車両に送信する(S492)。
【0103】
第3実施形態では、道路状況および車種をリモート基地局80に送信し、リモート基地局80から道路状況と車種とに対応した閾値を受信して取得するので、自車両で取得する範囲の閾値とは異なる閾値をリモート基地局80から取得できる。
【0104】
例えば、該当車種の発売開始後から一定期間に合わせて通常とは異なる判定条件を満たす車両挙動が発生するときの運転情報を記憶したい場合、あるいは該当車種で予期せぬ異常な車両挙動が発生してユーザからのクレームが頻発するために特定の異常挙動が発生するときの運転情報を記憶したい場合、これら条件に合わせてリモート基地局80で設定された閾値をリモート基地局から取得できる。
【0105】
その結果、ディーラ等に車両を持ち込むことなく、前述した条件に応じた閾値を取得できる。
第3実施形態において、図8のS470の処理、S478でリモート基地局80から閾値を受信する処理、およびS480の処理が本発明の閾値取得手段が実行する機能に相当し、S472においてナビECU40から道路状況を受信する処理が本発明の道路状況取得手段が実行する機能に相当し、S482において車両挙動を判定条件と比較する処理が本発明の挙動判定手段が実行する機能に相当し、S482において運転情報をメモリ62に記憶する処理が本発明の記憶手段が実行する機能に相当する。
【0106】
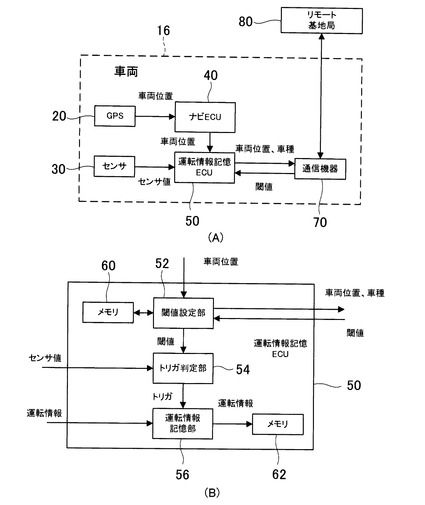
[第4実施形態]
図9に、第4実施形態による車両の運転情報記憶システム16を示す。運転情報記憶システム16においてECU50は、車種とVINとナビECU40から取得した車両位置とを通信機器70からリモート基地局80に送信し、リモート基地局80において車両位置および車種に基づいて設定された閾値を通信機器70により受信して取得する。
【0107】
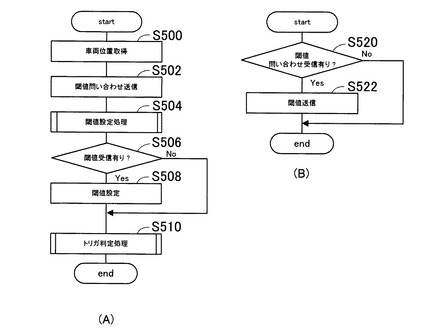
次に、ECU50が実行する運転情報記憶処理と、リモート基地局80が実行する閾値設定処理とについて、図10に基づいて説明する。尚、S506〜S510の処理は、図8のS478〜S482の処理と実質的に同一であるから説明を省略する。
【0108】
(運転情報記憶処理)
図10の(A)は、運転情報記憶処理のメイン処理を示すフローチャートであり、例えば100ms毎に実行される。
【0109】
ECU50は、ナビECU40から自車両の位置を取得し(S500)、通信機器70からリモート基地局80に自車両の位置と車種とVINとを送信し、車両位置および車種に対応した判定条件の閾値を問い合わせる(S502)。
【0110】
S504は、車両からの閾値の問い合わせに対しリモート基地局80が実行する閾値設定処理であり、処理内容は後述する。
(閾値設定処理)
図10の(B)は、リモート基地局80が実行する閾値設定処理である。
【0111】
リモート基地局80は、車両位置および車種を送信してくる車両から車両位置および車種に対応した閾値を問い合わせされると(S520:Yes)、受信した車両位置と地図データベースとに基づいて車両が走行している道路状況を設定し、この道路状況および車種に対応した閾値を閾値データベースから取得して該当車両に送信する(S522)。
【0112】
第4実施形態では、車両位置および車種をリモート基地局80に送信し、リモート基地局80において車両位置に基づいた道路状況を取得するので、ナビECU40が参照する地図データが古かったり、ナビECU40が設定する道路状況の精度が低かったりするために、適切な道路状況をナビECU40から取得できない場合にも、リモート基地局80において適切な道路状況を取得ができる。
【0113】
また、ナビECU40に道路状況を出力する機能がない場合にも、自車両からリモート基地局80に送信する車両位置に基づいて、リモート基地局80において適切な道路状況を取得ができる。
【0114】
また、第4実施形態では、リモート基地局80から道路状況と車種とに対応した閾値を受信して取得するので、自車両で取得する範囲の閾値とは異なる閾値をリモート基地局80から取得できる。
【0115】
例えば、該当車種の発売開始後から一定期間に合わせて通常とは異なる判定条件を満たす車両挙動が発生するときの運転情報を記憶したい場合、あるいは該当車種で予期せぬ異常な車両挙動が発生してユーザからのクレームが頻発するために特定の異常挙動が発生するときの運転情報を記憶したい場合、これら条件に合わせてリモート基地局80で設定された閾値をリモート基地局から取得できる。
【0116】
その結果、ディーラ等に車両を持ち込むことなく、前述した条件に応じた閾値を取得で
きる。
第4実施形態において、図10のS500、S502、S506およびS508において、ナビECU40から車両位置を取得し、取得した車両位置をリモート基地局80に送信し、リモート基地局80から閾値を受信して設定する処理が本発明の閾値取得手段が実行する機能に相当し、S510において車両挙動を判定条件と比較する処理が本発明の挙動判定手段が実行する機能に相当し、S510において運転情報をメモリ62に記憶する処理が本発明の記憶手段が実行する機能に相当する。
【0117】
[第5実施形態]
第5実施形態による車両の運転情報記憶システムは第1実施形態の運転情報記憶システム10と実質的に同一である。
【0118】
(運転情報記憶処理)
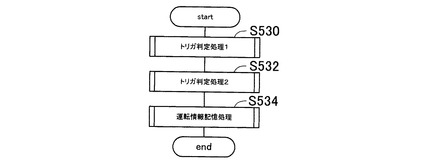
ECU50が実行する運転情報記憶処理を図11〜図14に基づいて説明する。
図11は、運転情報記憶処理のメイン処理を示すフローチャートであり、例えば100ms毎に実行される。図11のメイン処理では、以下に説明するS530のトリガ判定処理1、S532のトリガ判定処理2、S534の運転情報記憶処理が実行される。
【0119】
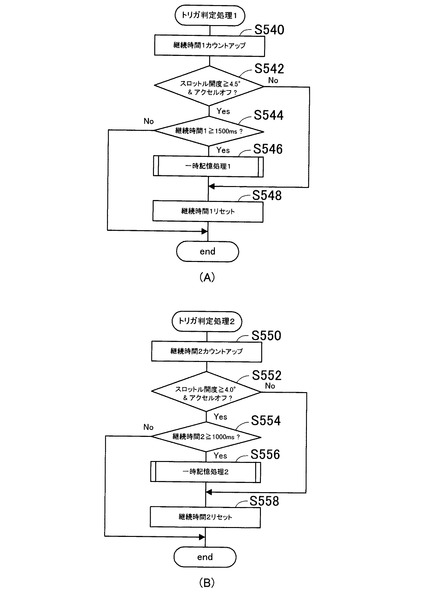
次に、図12の(A)にトリガ判定処理1を示し、図12の(B)にトリガ判定処理2を示す。トリガ判定処理1、2では、車両挙動を判定する判定条件として、スロットル開度および継続時間の閾値が異なっている。
【0120】
(トリガ判定処理1)
図12の(A)のS540においてECU50は、継続時間1をカウントアップする。そして、スロットル開度が4.5°以上かつアクセルオフであれば(S542:Yes)、S544に処理を移行し、スロットル開度が4.5°未満またはアクセルオンであれば(S542:No)、S548に処理を移行する。
【0121】
S544においてECU50は、継続時間1が1500ms以上経過したか否かを判定する。継続時間1が1500ms未満の場合(S544:No)、ECU50は本処理を終了する。継続時間1が1500ms以上経過している場合(S544:Yes)、ECU50は一時記憶処理1を実行し(S546)、S548に処理を移行する。S546の一時記憶処理1では、運転情報と運転情報を記憶する時刻とが一時的に記憶される。S548においてECU50は、継続時間1をリセットする。
【0122】
このように、トリガ判定処理1では、スロットル開度が4.5°以上かつアクセルオフであるか否か、ならびに継続時間1が1500ms以上経過したか否かを仮判定する。
(トリガ判定処理2)
図12の(B)のS550においてECU50は、継続時間2をカウントアップする。そして、スロットル開度が4.0°以上かつアクセルオフであれば(S552:Yes)、S554に処理を移行し、スロットル開度が4.0°未満またはアクセルオンであれば(S552:No)、S558に処理を移行する。
【0123】
S554においてECU50は、継続時間2が1000ms以上経過したか否かを判定する。継続時間1が1000ms未満の場合(S554:No)、ECU50は本処理を終了する。継続時間1が1000ms以上経過している場合(S554:Yes)、ECU50は一時記憶処理2を実行し(S556)、S558に処理を移行する。S556の一時記憶処理2では、運転情報と運転情報を記憶する時刻とが一時的に記憶される。S558においてECU50は、継続時間2をリセットする。
【0124】
このように、トリガ判定処理2では、スロットル開度が4.0°以上かつアクセルオフであるか否か、ならびに継続時間1が1000ms以上経過したか否かを仮判定する。
以上説明したように、判定条件を規定するスロットル開度および継続時間の閾値が、トリガ判定処理1では4.5°と1500ms、トリガ判定処理2では4.0°と1000msと異なっており、トリガ判定処理1の方がトリガ判定処理2よりも車両挙動が判定条件を満たしにくくなっている。
【0125】
したがって、例えば、トリガ判定処理2は道路状況がカーブの場合に車両挙動が判定条件を満たすか否かの判定用、トリガ判定処理1は道路状況がカーブよりも車両挙動が判定条件を満たしにくい直線道路の場合に車両挙動が判定条件を満たすか否かの判定用に使用される。
【0126】
そして、トリガ判定処理1、2において、道路状況に関わらず閾値の異なる判定条件を車両挙動が満たすか否かを予め判定し、車両挙動が判定条件を満たす場合に、そのときの運転情報と記憶時刻とを一時的に記憶する。
【0127】
尚、トリガ判定処理1、2の一時記憶処理1、2で運転情報および記憶時刻を記憶する領域は異なっているので、閾値の異なる複数の判定条件を車両挙動が満たす場合にも、それぞれの運転情報を記憶できる。
【0128】
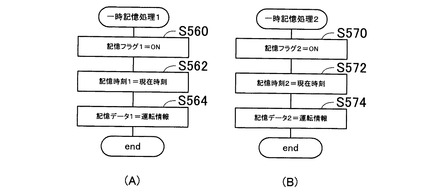
次に、図12の(A)のS546で実行される一時記憶処理1を図13の(A)に示し、図12の(B)のS556で実行される一時記憶処理2を図13の(B)に示す。
(一時記憶処理1)
図13の(A)において、ECU50は記憶フラグ1をオンにする(S560)。そして、運転情報を一時的に記憶する現在時刻を記憶時刻1として、さらにトリガ判定処理1において車両挙動が判定条件を満たしたときの運転情報を記憶データ1として、メモリ60を構成するRAMに一時的に記憶する(S562、S564)。
【0129】
(一時記憶処理2)
図13の(B)において、ECU50は記憶フラグ2をオンにする(S570)。そして、運転情報を一時的に記憶する現在時刻を記憶時刻2として、さらにトリガ判定処理2において車両挙動が判定条件を満たしたときの運転情報を記憶データ2として、メモリ60を構成するRAMに一時的に記憶する(S574)。
【0130】
前述したように、一時記憶処理1、2において、運転情報と運転情報を記憶する現在時刻とは異なる領域に記憶される。
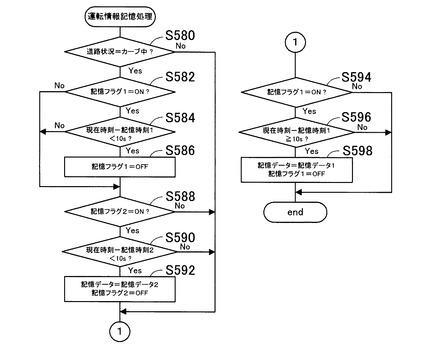
(運転情報記憶処理)
次に、図11のS534で実行される運転情報記憶処理を図14に示す。図14の運転情報記憶処理は、道路状況に関わらず、閾値の異なる判定条件を車両挙動が満たしている場合に図13の一時記憶処理1、2でメモリ60に一時的に記憶された運転情報のうち、車両が実際に走行する道路状況に対応する運転情報を正式にメモリ62に記憶する処理である。
【0131】
S580においてECU50は、道路状況がカーブ中であるか否かを判定する。道路状況がカーブ中の場合(S580:Yes)、ECU50はS582に処理を移行し、道路状況がカーブ中ではない場合(S580:No)、ECU50はS582〜S592の処理を実行せずS594に処理を移行する。
【0132】
S582においてECU50は、記憶フラグ1がオンであるか否か、つまり道路状況が直緯道路に対応する判定条件を車両挙動が満たしたために一時記憶処理1で運転情報が記
憶されたか否かを判定する。
【0133】
記憶フラグ1がオンの場合(S582:Yes)、ECU50は、一時記憶処理1において運転情報を記憶した記憶時刻1から道路状況がカーブ中の現在時刻までの経過時間が10s未満であるか否かを判定する(S584)。
【0134】
記憶フラグ1がオンで(S582:Yes)、記憶時刻1から道路状況がカーブ中の現在時刻までの経過時間が10s未満の場合(S584:Yes)、ECU50は、一時記憶処理1で運転情報を記憶してからカーブを走行中の現在時刻までに10s経過していないので、車両がカーブに進入する10s前よりも後の記憶時刻1で一時記憶処理1において運転情報が記憶されたと判断する。
【0135】
車両がカーブに進入する10s前よりも後の記憶時刻1においては、道路状況がカーブの手前またはカーブ中であり減速操作がなされると推定される。この場合、ECU50は、道路状況が直線道路用に設定された一時記憶処理1で記憶した運転情報は不適切であると判断し、記憶フラグ1をオフに設定し(S586)、S588に処理を移行する。
【0136】
このように、車両がカーブに進入する10s前よりも後で直線道路用に設定された一時記憶処理1において記憶フラグ1がオンになっても、記憶時刻1から10s以上経過する前にS586で記憶フラグ1はオフに設定される。その結果、車両がカーブに進入する10s前よりも後で一時記憶処理1において記憶フラグ1がオンになる場合、S584の判定は「No」にならない。
【0137】
記憶フラグ1がオフになると、一時記憶処理1でメモリ60に記憶された運転情報はメモリ62に正式に記憶されない。
記憶フラグ1がオフの場合(S582:No)、一時記憶処理1で運転情報は記憶されていないので、ECU50は記憶フラグ1をオフにすることなくS588に処理を移行する。
【0138】
記憶フラグ1がオンで(S582:Yes)、かつ記憶時刻1から道路状況がカーブ中の現在時刻までの経過時間が10s以上の場合(S584:No)、ECU50は、一時記憶処理1で運転情報を記憶してからカーブに進入するまでに10s以上経過しており、直線道路用に設定された一時記憶処理1で運転情報を記憶したときの道路状況はカーブの手前ではなく直線道路であったと判断する。
【0139】
この場合、一時記憶処理1で記憶した運転情報は道路状況に対応しているので、ECU50は、記憶フラグ1をオフにせずS588に処理を移行する。
S588においてECU50は、記憶フラグ2がオンであるか否か、つまり道路状況がカーブの場合に対応する判定条件を車両挙動が満たしたために一時記憶処理2で運転情報が記憶されたか否かを判定する。
【0140】
記憶フラグ2がオンの場合(S588:Yes)、ECU50は、一時記憶処理2において運転情報を記憶した記憶時刻2から道路状況がカーブ中の現在時刻までの経過時間が10s未満であるか否かを判定する(S590)。
【0141】
記憶フラグ2がオンで(S588:Yes)、記憶時刻2から道路状況がカーブ中の現在時刻までの経過時間が10s未満の場合(S590:Yes)、ECU50は、一時記憶処理2で運転情報を記憶してからカーブを走行中の現在時刻までに10s以上経過していないので、車両がカーブに進入する10s前よりも後の記憶時刻2で一時記憶処理2において運転情報が記憶されたと判断する。
【0142】
車両がカーブに進入する10s前よりも後の記憶時刻2においては、道路状況がカーブの手前またはカーブ中であり減速操作がなされると推定される。この場合、ECU50は、道路状況がカーブ用に設定された一時記憶処理2で記憶した運転情報は適切であると判断し、メモリ60に一時的に記憶されている記憶データ2を、運転情報としてメモリ62に正式に記憶して記憶フラグ2をオフに設定し(S592)、S594に処理を移行する。
【0143】
記憶フラグ2がオフの場合(S588:No)、ECU50は、一時記憶処理2で運転情報が記憶されなかったと判断し、S594に処理を移行する。
記憶フラグ2がオンで(S588:Yes)、かつ記憶時刻2から道路状況がカーブ中の現在時刻までの経過時間が10s以上の場合(S590:No)、ECU50は、一時記憶処理2で運転情報を記憶してからカーブに進入するまでに10s以上経過しており、カーブ用に設定された一時記憶処理2で運転情報を記憶したときの道路状況はカーブの手前ではなく直線道路であったと判断する。
【0144】
この場合、ECU50は、一時記憶処理2でメモリ60に記憶した運転情報をメモリ62に記憶せず、S594に処理を移行する。記憶フラグ2がオンであってもS590の判定が「No」であればS592は実行されないので、記憶フラグ2をオフに設定していない。
【0145】
S594においてECU50は、記憶フラグ1がオンであるか否かを判定する。記憶フラグ1がオンであり(S594:Yes)、一時記憶処理1において運転情報を記憶した記憶時刻1から現在時刻までの経過時間が10s以上の場合(S596:Yes)、ECU50は、一時記憶処理1で運転情報を記憶してからカーブに進入するまでに10s以上経過しており、直線道路用に設定された一時記憶処理1で運転情報を記憶したときの道路状況はカーブの手前ではなく直線道路であったと判断する。
【0146】
したがって、ECU50は、メモリ60に一時的に記憶されている記憶データ1は適切であると判断し、運転情報として記憶データ1をメモリ62に正式に記憶して記憶フラグ1をオフに設定し(S598)、本処理を終了する。
【0147】
記憶フラグ1がオンであり(S594:Yes)、一時記憶処理1において運転情報を記憶した記憶時刻1から現在時刻までの経過時間が10s未満の場合(S596:No)、現在の道路状況がカーブ中であれば、S586で記憶フラグ1はオフに設定されていたはずであるから、現在の道路状況はカーブ中ではなく、カーブの手前も含め直線であると判断できる。
【0148】
ただし、記憶時刻1から現在時刻までの経過時間が10s未満であるので、ECU50は、道路状況がカーブの手前か直線道路かが確定していないと判断し、本処理を終了する。
【0149】
記憶フラグ1がオフの場合(S594:No)、一時記憶処理2で運転情報は記憶されていないので、ECU50は本処理を終了する。
以上説明したように、第5実施形態では、道路状況に関わらず、予め閾値の異なる判定条件を車両挙動が満たす場合に運転情報を一時的に記憶し、車両が実際に走行する道路状況が一時的に記憶した運転情報に対応する道路状況の場合に、一時的に記憶した道路情報を正式情報として記憶します。
【0150】
これにより、車両の進行方向で道路が分岐し、例えば直線とカーブのように道路状況が
異なっていても、予め分岐先の道路状況に対応する閾値の異なる判定条件を車両挙動が満たす場合に、運転情報を一時的に記憶しておくことにより、車両が分岐先のいずれの道路状況を走行しても、車両挙動が判定条件を満たす場合に、一時的に記憶されている運転情報から適切な運転情報を選択して記憶できる。
【0151】
第5実施形態において、図12の(A)のS542、S544、ならびに図12の(B)のS552、S554でスロットル開度と継続時間とをそれぞれ閾値と比較するときに閾値を参照する処理が本発明の閾値取得手段が実行する機能に相当し、図12の(A)のS542、S544、ならびに図12の(B)のS552、S554でスロットル開度と継続時間とをそれぞれ閾値と比較する処理が本発明の挙動判定手段が実行する機能に相当する。
【0152】
また、図13の(A)のS564および図13の(B)のS574において運転情報を一時的に記憶する処理が本発明の一時記憶手段が実行する機能に相当する。
また、図14のS580において道路状況がカーブ中であるか否かを判定するときに道路状況を取得する処理が本発明の道路状況取得手段が実行する機能に相当し、S592およびS598で記憶データ1、2を正式に記憶する処理が本発明の記憶手段が実行する機能に相当する。
【0153】
[他の実施形態]
上記実施形態では、車両挙動と比較する判定条件の閾値として、スロットル開度と車両挙動の継続時間とを例示した。判定条件の閾値はこれに限らず、車速等を判定条件の閾値としてもよい。
【0154】
第5実施形態では、道路状況に関わらず、予め異なる閾値でそれぞれ規定される判定条件と比較される道路状況として、カーブと、カーブよりも閾値が大きく車両が加速状態であると判定されにくい直線道路とを例示した。これに対し、カーブおよび直線道路と判定条件の閾値が異なる道路状況を、カーブおよび直線道路に加えて判定条件と比較してもよい。
【0155】
また、運転情報を記憶する記憶部は、自ECU50に搭載している記憶部に限らず他の記憶部であってもよい。また、運転情報を正式に記憶する記憶部は、SRAMまたはEEPROMに限らず、車両の運転停止中もデータを保持できるのであればどのような記憶部でもよい。
【0156】
本発明は、ガソリンエンジンまたはディーゼルエンジン等の内燃機関を駆動源とする車両、あるいは内燃機関とモータとを併用したハイブリッド車両、あるいはモータを駆動源とする電気自動車のいずれに適用してもよい。
【0157】
このように、本発明は、上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能である。
【符号の説明】
【0158】
10、12、14、16:運転情報記憶システム、20:GPS(位置検出装置)、40:ナビECU(ナビゲーション装置、位置検出装置)、50:ECU(電子制御装置、閾値取得手段、挙動判定手段、記憶手段、一時記憶手段、道路状況取得手段)、52:閾値設定部(道路状況取得手段、閾値取得手段)、54:トリガ判定部(挙動判定手段)、56:運転情報記憶部(記憶手段)、60、62:メモリ(記憶部)、80:リモート基地局
【技術分野】
【0001】
本発明は、判定条件を満たす車両挙動が発生すると車両の所定の運転情報を記憶する電子制御装置に関する。
【背景技術】
【0002】
従来、特許文献1に開示されているように、車両に搭載された各種センサの検出信号から車両挙動を診断し、解析する技術が知られている。また、衝突等により車両に衝撃が加わったときに、衝突前後の各種センサの出力情報を車両走行情報として記憶する技術が公知である。
【0003】
また、センサやアクチュエータに異常が発生した場合には、異常状態に対応したダイアグコードと、そのときの時間軸に沿ったセンサ出力や制御データを運転情報(フリーズフレームデータ)として記憶することが行われている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第5754965号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、ダイアグコードおよびフリーズフレームデータはセンサやアクチュエータ等に異常が発生したときに記憶されるので、例えば、センサおよびアクチュエータに異常は発生しておらず正常であるが、運転者の運転操作に対応しない車両挙動が発生したときには、そのときの運転情報は記憶されない。その結果、運転者の運転操作に対応しない車両挙動が発生したために運転者が違和感を感じても、その原因を車両の運転情報に基づいて解析できないという問題がある。
【0006】
そこで、例えば運転者の運転操作に対応しない車両挙動を検出するための判定条件を設定し、車両挙動が判定条件を満たす場合に運転情報を記憶することが考えられる。これにより、記憶された運転情報に基づいて、運転者の運転操作に対応しない車両挙動が発生した原因を解析できる。
【0007】
しかしながら、運転者が運転操作に対応しない車両挙動であると感じる違和感は、車両が走行する道路状況、例えば道路が真っ直ぐであるか曲がっているか、道路上か駐車場かによって異なる場合がある。したがって、判定条件を規定する閾値が固定であると、運転者が違和感を感じる車両挙動であっても判定条件を満たさず、運転情報を記憶できないおそれがある。
【0008】
また、判定条件を規定する閾値が固定であると、運転者が違和感を感じない車両挙動であっても判定条件を満たすために、運転者が違和感を感じない車両挙動の運転情報を記憶することがある。その結果、運転情報の記憶量が増えると、記憶容量の制限のために違和感を感じた車両挙動の運転情報が上書きされるおそれがある。
【0009】
本発明は、上記課題を解決するためになされたものであり、車両が走行する道路状況に応じて運転情報を適切に記憶する電子制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
請求項1から15に記載の発明によると、判定条件を満たす車両挙動が発生すると車両の所定の運転情報を記憶する電子制御装置において、閾値取得手段は車両が走行する道路状況に対応する判定条件を規定する異なる閾値を取得し、挙動判定手段は閾値取得手段が取得する閾値により規定される判定条件を車両挙動が満たすか否かを判定する。
【0011】
この構成によれば、道路状況に対応して判定条件を規定する適切な閾値が取得されるので、判定条件を規定する閾値が変化せず固定の場合に比べ、道路状況によって車両挙動が過度に判定条件を満たしたり、満たさなかったりすることを防止できる。
【0012】
そして、記憶手段は、閾値取得手段が取得する閾値により規定される判定条件を車両挙動が満たすと挙動判定手段が判定すると、運転情報を記憶部に記憶する。
このように、道路状況に応じた閾値により規定される判定条件を車両挙動が満たす場合に運転情報を記憶するので、道路状況に応じて適切な運転情報を記憶できる。これにより、運転者が違和感を感じる車両挙動であっても判定条件を満たさないために運転情報が記憶されないこと、ならびに運転者が違和感を感じない車両挙動であっても判定条件を満たすために運転情報が記憶されることを極力防止できる。
【0013】
請求項2に記載の発明によると、道路状況取得手段は、自車両に搭載されたナビゲーション装置から道路状況を取得する。
これにより、自車両がナビゲーション装置を搭載している場合には、車両に搭載されたナビゲーション装置の機能を利用して車両が走行する道路状況を取得できる。
【0014】
請求項3に記載の発明によると、閾値取得手段は、自車両の車種と道路状況取得手段がナビゲーション装置から取得する道路状況とをリモート基地局に送信し、リモート基地局から道路状況および車種に対応する閾値を受信して取得する。
【0015】
これにより、道路状況および車種に対応して、自車両内で取得する閾値とは値が異なる閾値をリモート基地局から取得できる。例えば、該当車種の発売開始後から一定期間に合わせて通常とは異なる判定条件を満たす車両挙動が発生するときの運転情報を記憶したい場合、あるいは該当車種で予期せぬ異常な車両挙動が発生してユーザからのクレームが頻発するために特定の異常挙動が発生するときの運転情報を記憶したい場合、これら条件に合わせてリモート基地局で設定された閾値をリモート基地局から取得できる。
【0016】
このように、自車両内で取得する閾値とは値が異なる閾値を取得しようとすると、車両をディーラ等に持ち込み書き込みツール等で閾値を変更する必要があるが、リモート基地局から閾値を取得するので、ディーラ等に車両を持ち込むことなく、前述した条件に応じた閾値を取得できる。
【0017】
請求項4に記載の発明によると、道路状況取得手段は、自車両に搭載された位置検出装置から取得する自車両の位置をリモート基地局に送信し、リモート基地局から自車両の位置に対応する道路状況を受信して取得する。
【0018】
これにより、ナビゲーション装置の地図データが古かったり、車両位置に基づくナビゲーション装置の道路状況の認識精度が低かったり、ナビゲーション装置に道路状況を出力する機能がなかったりするために、適切な道路状況をナビゲーション装置から取得できない場合にも、自車両からリモート基地局に送信する車両位置に対応して、リモート基地局から適切な道路状況を取得することができる。
【0019】
ところで、車両の進行方向前方で道路が分岐している場合、運転者が分岐前に行う運転操作は、車両が分岐先のいずれかの道路に進入することを前提とした運転操作であること
が一般的である。したがって、分岐前の運転操作が分岐先のいずれの道路状況を前提としているかは、分岐先のいずれかの道路に車両が進入するまで確定しない。
【0020】
そこで、請求項5に記載の発明によると、挙動判定手段は、閾値取得手段が取得する複数の異なる閾値によりそれぞれ規定される判定条件を車両挙動が満たすか否かを、車両が走行している道路状況に関わらず仮判定し、一時記憶手段は、複数の異なる閾値により規定される判定条件の少なくともいずれか一つを車両挙動が満たすと挙動判定手段が仮判定するときの運転情報を記憶部に一時的に記憶し、記憶手段は、挙動判定手段による仮判定後に、記憶部に一時的に記憶されている運転情報のうち、車両が実際に走行した道路状況に対応する運転情報を正式に記憶部に記憶する。
【0021】
この構成によれば、車両の進行方向前方の道路が分岐している場合に、閾値の異なる判定条件を車両挙動が満たすか否かを道路状況に関わらず予め判定しておくことにより、少なくともいずれか一つの判定条件を車両挙動が満たす場合に記憶部に一時的に記憶した運転情報から、車両が分岐先で実際に走行した道路状況に対応する適切な運転情報を選択し、正式な運転情報として記憶できる。
【0022】
請求項6に記載の発明によると、閾値取得手段は、道路状況に対応する閾値を算出する。
このように、閾値取得手段が道路状況に応じて自ら閾値を算出するので、電子制御装置は閾値を取得するために、自車両に搭載した自装置以外の装置または車両の外部と通信する必要がない。これにより、通信異常や低い通信性能により閾値の取得処理が妨げられることを防止できる。
【0023】
ところで、車両が減速操作されると推定される場合に車両が加速すると、車両が減速操作されると推定されない場合よりも低い加速で、運転者は違和感を感じやすいと考えられる。
【0024】
そこで、請求項7に記載の発明によると、閾値取得手段は、道路状況取得手段が取得する道路状況に基づいて車両が減速操作されると推定される場合、車両が減速操作されると推定されない場合に比べ、車両の加速状態が判定条件を満たしていると挙動判定手段が判定しやすくなる方向に閾値を設定する。
【0025】
これにより、車両が減速操作されると推定される場合に、低い加速であっても運転者が違和感を感じる車両の加速状態が発生すると、そのときの運転情報を記憶できる。
このように、車両が減速操作されると推定される道路状況として、請求項8に記載のカーブの手前、請求項9に記載の下り坂、請求項10に記載の公共駐車場などが考えられる。
【0026】
一方、車両が加速操作されると推定される場合、車両が加速操作されると推定されない場合に比べ、運転者は低い加速では違和感を感じにくいと考えられる。
そこで、請求項11に記載の発明によると、閾値取得手段は、道路状況取得手段が取得する道路状況に基づいて、車両が加速操作されると推定される場合、車両が加速操作されると推定されない場合に比べ、車両の加速状態が判定条件を満たしていると挙動判定手段が判定しにくくなる方向に閾値を設定する。
【0027】
これにより、車両が加速操作されると推定される場合、運転者が違和感を感じない低い加速のときに運転情報が記憶されることを防止できる。
このように、車両が加速操作されると推定される道路状況として、請求項12に記載の上り坂などが考えられる。
【0028】
ところで、道路状況によっては、車両挙動を検出するセンサ等の検出値が変動しやすいために、車両の加速状態が判定条件を満たしやすい場合がある。この場合には、運転者が運転操作に対する車両挙動に違和感を感じていないにも関わらずに加速状態が判定条件を満たし、不必要な運転情報が記憶されることになる。その結果、運転者が違和感を感じる車両挙動が発生したときに記憶された運転情報が、不必要な運転情報のために上書きされるおそれがある。
【0029】
そこで、請求項13に記載の発明によると、閾値取得手段は、道路状況取得手段が取得する道路状況に基づいて、車両の加速状態が判定条件を満たしやすいと推定される場合、判定条件を満たしやすいと推定されない場合に比べ、車両の加速状態が判定条件を満たしていると挙動判定手段が判定しにくくなる方向に閾値を設定する。
【0030】
これにより、車両の加速状態が判定条件を満たしやすい道路状況であっても、車両の加速状態が判定条件を満たしにくくなる。その結果、運転者が運転操作に対する車両挙動に違和感を感じていないにも関わらず、運転情報が記憶されることを防止できる。
【0031】
このように、車両の加速状態が判定条件を満たしやすいと推定される道路状況として、請求項14に記載の未舗装道路または工事中道路などが考えられる。未舗装道路または工事中道路のように路面の凹凸が大きい道路では、センサ等の検出値が変動しやすいために、車両の加速状態が判定条件を満たしやすくなると推定される。
【0032】
請求項15に記載の発明によると、閾値取得手段は、自車両に搭載された位置検出装置から取得する自車両の位置と自車両の車種とをリモート基地局に送信し、リモート基地局から自車両の位置に対応する道路状況と車種とに対応する閾値を受信して取得する。
【0033】
これにより、ナビゲーション装置の地図データが古かったり、ナビゲーション装置の道路状況の認識精度が低かったり、ナビゲーション装置に道路状況を出力する機能がなかったりするために、適切な道路状況をナビゲーション装置から取得できない場合にも、自車両からリモート基地局に送信する自車両位置に対応して、リモート基地局において適切な道路状況が検出される。
【0034】
さらに、道路状況と車種とに対応した、自車両で取得する閾値とは値が異なる閾値をリモート基地局から取得できる。例えば車両の発売開始後から一定期間に合わせて通常とは異なる判定条件を満たす車両挙動が発生するときの運転情報を記憶したい場合、あるいは該当車種で予期せぬ異常な車両挙動が発生してユーザからのクレームが頻発するために特定の異常挙動が発生するときの運転情報を記憶したい場合、これら条件に合わせてリモート基地局で設定された閾値をリモート基地局から取得できる。
【0035】
その結果、ディーラ等に車両を持ち込むことなく、前述した条件に応じた閾値を取得できる。
【図面の簡単な説明】
【0036】
【図1】(A)は第1実施形態による運転情報記憶システムを示すブロック図、(B)は第1実施形態の電子制御装置を示すブロック図。
【図2】第1実施形態の運転情報記憶処理のメイン処理を示すフローチャート。
【図3】第1実施形態の閾値算出・設定処理を示すフローチャート。
【図4】第1実施形態のトリガ判定処理を示すフローチャート。
【図5】(A)は第2実施形態による運転情報記憶システムを示すブロック図、(B)は第2実施形態の電子制御装置を示すブロック図。
【図6】(A)は第2実施形態の運転情報記憶処理のメイン処理を示すフローチャート、(B)は第2実施形態の道路状況設定処理を示すフローチャート。
【図7】(A)は第3実施形態による運転情報記憶システムを示すブロック図、(B)は第3実施形態の電子制御装置を示すブロック図。
【図8】(A)は第3施形態の運転情報記憶処理のメイン処理を示すフローチャート、(B)は第3実施形態の閾値設定処理を示すフローチャート。
【図9】(A)は第4実施形態による運転情報記憶システムを示すブロック図、(B)は第4施形態の電子制御装置を示すブロック図。
【図10】(A)は第4施形態の運転情報記憶処理のメイン処理を示すフローチャート、(B)は第4実施形態の閾値設定処理を示すフローチャート。
【図11】第5実施形態の運転情報記憶処理のメイン処理を示すフローチャート。
【図12】(A)は第5実施形態のトリガ判定処理1を示すフローチャート、(B)は第5実施形態のトリガ判定処理2を示すフローチャート。
【図13】(A)は第5実施形態の一時記憶処理1を示すフローチャート、(B)は第5実施形態の一時記憶処理2を示すフローチャート。
【図14】第5実施形態の運転情報記憶処理示すフローチャート。
【発明を実施するための形態】
【0037】
以下、本発明の実施形態を図に基づいて説明する。
[第1実施形態]
図1に、第1実施形態による車両の運転情報記憶システム10を示す。運転情報記憶システム10は、GPS(Global Positioning System)20、各種センサ30、ナビECU(Electronic Control Unit)40、運転情報記憶ECU50から構成されている。
【0038】
ナビECU40は、地図データとGPS20から取得する自車両の緯度、経度情報とに基づいて地図上の車両位置を求め、車両室内に設置されたディスプレイに地図および現在の車両位置を表示させる。そして、車両位置および車両の進行方向などに基づき、車両が走行中の道路状況を運転情報記憶ECU50に出力する。
【0039】
道路状況には、車両が道路を走行している場合には、カーブ等の道路の形状、勾配、幅、トンネルの存在、渋滞および事故の発生、故障車等の障害物の存在を含み、道路以外を走行しているのであれば公共駐車場などの走行場所、さらに凍結または霧等の気象条件も含まれる。
【0040】
運転情報記憶ECU50(以下、単にECU50とも言う。)は、図示しないCPU、ROM、RAM、SRAM(スタンバイRAM)、EEPROM等を有するマイクロコンピュータにより主に構成されている。SRAMは、車両の運転が停止してもバッテリから電力を供給されるので、記憶しているデータを保持する。
【0041】
ECU50はROMに記憶された制御プログラムをCPUが実行することにより、閾値設定部52、トリガ判定部54、運転情報記憶部56として機能する。メモリ60はRAMおよびROMで構成されており、メモリ62はSRAMおよびEEPROMにより構成されている。
【0042】
閾値設定部52は、メモリ60を構成するROMから取得する基準閾値に基づき、例えばナビECU40から取得する道路状況に対応した、車両挙動と比較する判定条件の閾値を算出して設定する。
【0043】
トリガ判定部54は、センサ30の検出信号から車両挙動を検出し、検出した車両挙動が閾値設定部52で閾値を設定された判定条件を満たすか否かを判定することにより、所
定の運転情報を記憶するトリガが発生したか否かを判定する。車両挙動としては、アクセルオフ時においてスロットル開度から検出する車両の加速状態と、加速状態の継続時間等が考えられる。アクセルオフ時に車両が所定時間以上継続して加速状態になると、運転者は違和感を感じる。
【0044】
運転情報記憶部56は、車両挙動が判定条件を満たすとトリガ判定部54が判定することをトリガとし、所定の運転情報をEEPROMまたはSRAMから構成されるメモリ62に記憶する。
【0045】
メモリ62に記憶される所定の運転情報は、車両挙動が判定条件を満たすときの車両の運転状態を表わす情報であり、予めアクセル開度、スロットル開度、トランスミッションの変速位置、水温、吸気量、吸気温、エンジン回転数等が運転情報として設定されている。運転者が車両挙動に違和感を感じたときにディーラ等に車両を持ち込むと、メモリ62に記憶された運転情報が読み出され、判定条件を満たす車両挙動が発生した原因が解析される。
【0046】
(運転情報記憶処理)
次に、ECU50が閾値設定部52、トリガ判定部54、運転情報記憶部56として機能することにより実行される運転情報記憶処理について、図2〜図4に示すフローチャートに基づいて説明する。尚、図2〜図4、ならびに第1実施形態以外の他の実施形態のフローチャートにおいて、「S」はステップを表わしている。
【0047】
図2〜図4に示す運転情報記憶処理は、運転操作に対する車両挙動として運転者が違和感を感じる車両の加速状態が、道路状況に対応した異なる閾値により規定される判定条件を満たす場合に、運転情報を記憶する処理である。
【0048】
(メイン処理)
図2は、運転情報記憶処理のメイン処理を示すフローチャートであり、例えば100ms毎に実行される。
【0049】
まずECU50は、車両挙動が運転者の運転操作に対応しない異常挙動であるか否かを判定するための判定条件の基準閾値として、スロットル開度閾値=4.5°、継続時間閾値=1500msをメモリ60を構成するROMから読み出して取得する(S400)。継続時間閾値は、スロットル開度センサから検出するスロットル開度がスロットル開度閾値以上である状態が所定時間以上継続する車両挙動が発生したか否かを判定するための所定時間を表わす閾値である。
【0050】
そして、ECU50は、ナビECU40から道路状況を受信したか否かを判定する。ナビECU40は、例えば車両の走行道路がカーブ、坂など、直線道路が継続しないときに、車内LAN等で道路状況を送信する。カーブには、カーブの手前およびカーブ中が含まれる。道路状況を受信していない場合(S402:No)、ECU50は本処理を終了するので、運転情報はメモリ62に記憶されない。
【0051】
道路状況を受信すると(S402:Yes)、ECU50は、ナビECU40から取得した道路状況に基づいて、閾値算出・設定処理を行う(S404)。
ECU50は、S404で判定条件を規定する閾値が設定されると、閾値により規定される判定条件を満たす異常な車両挙動が発生したか否かを判定し、判定条件を満たす車両挙動が発生すると、所定の運転情報をメモリ62に記憶する(S406)。S404の閾値算出・設定処理、およびS406のトリガ判定処理の詳細については後述する。
【0052】
(閾値算出・設定処理)
図3の閾値算出・設定処理において、ECU50は、ナビECU40から受信して取得した道路状況が未舗装道路であるか否かを判定する(S410)。
【0053】
道路状況が未舗装道路のように路面に凹凸がある悪路の場合、スロットル開度を検出するスロットル開度センサの検出値が変動しやすいので、実際の加速状態よりも高い加速状態であると検出されるおそれがある。
【0054】
その結果、図2のS400で設定したスロットル開度閾値および継続時間閾値の基準閾値のままでは、アクセルオフ時において車両が加速状態であると判定されやすいと考えられる。すると、運転者がアクセルオフ時における加速状態に違和感を感じていないにも関わらず、運転情報が記憶されるおそれがある。
【0055】
そこで、道路状況が未舗装道路の場合(S410:Yes)、ECU50は、スロットル開度閾値、継続時間閾値を、それぞれ図2のS400で設定した基準閾値ではなく、スロットル開度閾値=5.5°、継続時間閾値=2000msに設定する(S412)。尚、未舗装道路のように路面に凹凸がある道路状況の悪路として、工事中道路を加えてもよい。
【0056】
スロットル開度閾値を基準閾値よりも増加し、継続時間閾値を基準閾値よりも長くすることにより、アクセルオフ時における車両の加速状態が判定条件を満たすか否かを判定するときに、加速状態が判定条件を満たしにくくなる方向にスロットル開度閾値および継続時間閾値が設定される。
【0057】
これにより、車両挙動として車両の加速状態を検出するスロットル開度センサの検出値が変動しやすいために、運転者がアクセルオフ時における加速状態に違和感を感じていないにも関わらず、加速状態が判定条件を満たし、運転情報が記憶されることを極力防止できる。したがって、運転者が実際に違和感を感じる車両挙動が発生したために記憶された運転情報が、運転者が違和感を感じない車両挙動のために上書きされることを防止できる。
【0058】
道路状況が未舗装道路ではない場合(S410:No)、ECU50は道路状況がカーブであるか否かを判定する(S414)。道路状況がカーブであることは、カーブの手前およびカーブ中であることの両方を含む。ECU40は、車両の前方にカーブが存在する場合、例えばカーブに進入する50m前から、道路状況としてカーブであることを送信する。道路状況がカーブではない場合(S414:No)、ECU50はS420に処理を移行する。
【0059】
道路状況がカーブである場合(S414:Yes)、ECU50は、カーブまでの距離が50m未満であるか否かを判定する(S416)。車両がカーブを走行中の場合、カーブまでの距離は0またはマイナスであると判断し、S416の判定は「Yes」となる。カーブまでの距離が50m以上の場合(S416:No)、ECU50はS420に処理を移行する。
【0060】
カーブまでの距離が50m未満の場合(S416:Yes)、ECU50は、スロットル開度閾値から1.0°を減算し、継続時間閾値から500msを減算する(S418)。これにより、スロットル開度閾値=3.5°、継続時間閾値=1000msに設定される。
【0061】
このように、カーブまでの距離が50m未満であり、運転者によりアクセルオフ、ブレ
ーキオン、シフトダウン等の減速操作がなされると推定される道路状況においては、低い加速であっても運転者は違和感を感じやすい。
【0062】
そこで、カーブの手前またはカーブ中のようにアクセルオフにより車両が減速操作されると推定される道路状況においてスロットル開度閾値および継続時間閾値を減算することにより、アクセルオフ時における車両の加速状態が判定条件を満たすか否かを判定するときに、加速状態が判定条件を満たしやすくなる方向に、スロットル開度閾値および継続時間閾値が設定される。
【0063】
これにより、低い加速であってもカーブの手前またはカーブ中であるために運転者が違和感を感じやすい道路状況にも関わらず、スロットル開度閾値および継続時間閾値が固定であるために車両挙動が判定条件を満たさず、運転情報が記憶されないことを極力防止できる。
【0064】
S420においてECU50は、道路状況が坂であるか否かを判定する。道路状況が坂ではない場合(S420:No)、ECU50は本処理を終了する。
道路状況が坂であり(S420:Yes)、傾斜角度が−5°より小さい下り坂の場合(S422:Yes)、ECU50は、スロットル開度閾値から0.5°を減算し、継続時間閾値から500msを減算する(S424)。
【0065】
このように、傾斜角度が−5°より急であり減速操作がなされると推定される下り坂の場合に、道路状況がカーブの手前50m未満の場合と同様にスロットル開度閾値および継続時間閾値を減算することにより、アクセルオフ時における車両の加速状態が判定条件を満たすか否かを判定するときに、加速状態が判定条件を満たしやすくなる方向に、スロットル開度閾値および継続時間閾値が設定される。
【0066】
これにより、低い加速であっても、傾斜角度が−5°より急な下り坂であるために運転者がアクセルオフ時における車両の加速状態に違和感を感じやすい道路状況にも関わらず、スロットル開度閾値および継続時間閾値が固定であるために車両挙動が判定条件を満たさず、運転情報が記憶されないことを極力防止できる。
【0067】
道路状況が坂であり(S420:Yes)、傾斜角度が−5°以上の場合(S422:No)、ECU50は、傾斜角度が+5°より大きい上り坂か否かを判定する(S426)。傾斜角度が+5°以下の場合(S426:No)、ECU50は本処理を終了する。
【0068】
傾斜角度が+5°より大きい場合(S426:Yes)、ECU50は、スロットル開度閾値に0.5°を加算し、継続時間閾値に500msを加算する(S428)。
このように、傾斜角度が+5°より急な上り坂であり、運転者によりアクセルを踏み込む加速操作がなされると推定される道路状況においては、アクセルをオフした状態でも低い加速であれば運転者は違和感を感じにくい。
【0069】
そこで、傾斜角度が+5°より大きい上り坂のように車両が加速操作されると推定される道路状況においてスロットル開度閾値および継続時間閾値を加算することにより、アクセルオフ時における車両の加速状態が判定条件を満たすか否かを判定するときに、加速状態が判定条件を満たしにくくなる方向に、スロットル開度閾値および継続時間閾値が設定される。
【0070】
これにより、低い加速であれば傾斜角度が+5°より急な上り坂であるために運転者が違和感を感じにくい道路状況にも関わらず、スロットル開度閾値および継続時間閾値が固定であるために車両挙動が判定条件を満たしやすくなり、運転情報が記憶されやすくなる
ことを極力防止できる。
【0071】
その結果、運転者が実際に違和感を感じる車両挙動が発生したために記憶された運転情報が、運転者が違和感を感じない車両挙動のために上書きされることを防止できる。
尚、図3の閾値算出・設定処理においてスロットル開度閾値および継続時間閾値が新たに設定されない場合、スロットル開度閾値および継続時間閾値は図2のメイン処理で設定される基準閾値のままである。
【0072】
(トリガ判定処理)
図4のトリガ判定処理において、ECU50は、継続時間をカウントアップし(S430)、スロットル開度が図2のメイン処理または図3の閾値算出・設定処理で設定されたスロットル開度閾値以上かつアクセルオフであるか否かを判定する(S432)。ECU50は、スロットル開度がスロットル開度閾値以上かつアクセルオフであれば(S432:Yes)、S434に処理を移行し、スロットル開度がスロットル開度閾値未満またはアクセルオンであれば(S432:No)、S438に処理を移行する。
【0073】
S434においてECU50は、継続時間が図2のメイン処理または図3の閾値算出・設定処理で設定された継続時間閾値以上であるか否かを判定する。ECU50は、継続時間が継続時間閾値以上であれば(S434:Yes)、S436に処理を移行し、継続時間が継続時間閾値未満であれば(S434:No)、本処理を終了する。
【0074】
スロットル開度がスロットル開度閾値以上かつアクセルオフであり(S432:Yes)、その状態が継続時間閾値以上継続すると(S434:Yes)、S436においてECU50は、そのときの運転情報をメモリ62に記憶する。前述したように、メモリ62はSRAM、EEPROMで構成されているので、車両が走行を停止しても、記憶された運転情報は保持される。
【0075】
運転情報を記憶するメモリ62はリングバッファとして構成されており、車両挙動が判定条件を満たすときの所定回数分の運転情報が記憶される。所定回数を超えて車両挙動が判定条件を満たすと、最も古い運転情報が最新の運転情報により書換えられる。
【0076】
S438においてECU50は、継続時間をリセットし(S438)、本処理を終了する。
トリガ判定処理でメモリ62に記憶された運転情報は、運転操作に対応しない異常な車両挙動が発生して運転者が違和感を感じたためにディーラ等に車両が持ち込まれると、診断ツールによりメモリ62から読み出され、異常な車両挙動の発生原因が解析される。
【0077】
以上説明した第1実施形態では、未舗装道路、カーブ、坂の傾斜角度等の道路状況に対応して、スロットル開度閾値および継続時間閾値のように判定条件を規定する閾値を設定するので、道路状況に対応して適切な閾値を設定できる。
【0078】
これにより、判定条件を規定する閾値が固定の場合に比べ、道路状況によって車両挙動が過度に判定条件を満たしたり、満たさなかったりすることを防止できる。
そして、道路状況に対応した閾値により規定される判定条件を車両挙動が満たす場合に運転情報を記憶するので、運転者が違和感を感じる車両挙動であっても判定条件を満たさないために運転情報が記憶されないこと、ならびに運転者が違和感を感じない車両挙動であっても判定条件を満たすために運転情報が記憶されることを極力防止できる。
【0079】
また、第1実施形態では、ECU50は、自車両のナビECU40から道路状況を取得する。これにより、自車両に搭載されたナビECU40の機能を利用して、車両が走行す
る道路状況を取得できる。
【0080】
また、ECU50は、ナビECU40から取得する道路状況に基づいて、スロットル開度閾値および継続時間閾値を算出して設定するので、車両の外部と通信して閾値を取得する必要がない。これにより、通信異常や低い通信性能により閾値の設定処理が妨げられることを防止できる。
【0081】
第1実施形態では、ナビECU40が本発明のナビゲーション装置に相当し、ECU50が本発明の電子制御装置に相当し、メモリ62が本発明の記憶部に相当する。
そして、ECU50の閾値設定部52は本発明の道路状況取得手段および閾値取得手段として機能し、トリガ判定部54は本発明の挙動判定手段として機能し、運転情報記憶部56は本発明の記憶手段として機能する。
【0082】
また、図2のS400、ならびに図3のS412、S418、S424およびS428の処理が本発明の閾値取得手段が実行する機能に相当し、図2のS402の処理、ならびに図3のS410、S414、S416、S420、S422およびS426の判定で道路状況を参照する処理が本発明の道路状況取得手段が実行する機能に相当し、図4のS432およびS434の処理が本発明の挙動判定手段が実行する機能に相当し、図4のS436の処理が本発明の記憶手段が実行する機能に相当する。
【0083】
[第2実施形態]
図5に、第2実施形態による車両の運転情報記憶システム12を示す。運転情報記憶システム12は、第1実施形態の運転情報記憶システム10に対し、リモート基地局80と通信する通信機器70を備えている点で異なっている。
【0084】
ECU50は、ナビECU40から取得した自車両の位置を、車両を特定するVIN(Vehicle Identification Number)等の識別番号とともに通信機器70からリモート基地局80に送信し、リモート基地局80から車両位置に応じた道路状況を通信機器70により受信して取得する。
【0085】
リモート基地局80は、最新の地図データベースを備えており、地図データベースと車両から送信されてきた車両位置とに基づいて車両位置における道路状況を高精度に設定する機能を備えており、設定した道路状況を該当車両に送信する。
【0086】
次に、ECU50が実行する運転情報記憶処理と、リモート基地局80が実行する道路状況設定処理について、図6に基づいて説明する。
(運転情報記憶処理)
図6の(A)は、運転情報記憶処理のメイン処理を示すフローチャートであり、例えば100ms毎に実行される。
【0087】
まずECU50は、ナビECU40から車両位置を取得し(S440)、VINおよび車両位置を通信機器70からリモート基地局80に送信し、自車両が走行している道路状況を問い合わせる(S442)。
【0088】
S444は、車両からの道路状況の問い合わせに対しリモート基地局80が実行する道路状況設定処理であり、処理内容は後述する。
次に、ECU50は、スロットル開度閾値および車両挙動の継続時間閾値として、スロットル開度閾値=4.5°、継続時間閾値=1500msをメモリ60から読み出して取得し(S446)、リモート基地局80から道路状況を受信したか否かを判定する(S448)。
【0089】
通信異常等により、リモート基地局80から道路状況を受信できない場合(S448:No)、ECU50はS452を実行せずS454に処理を移行する。この場合、スロットル開度閾値および継続時間閾値は、S446で設定した値のままである。
【0090】
リモート基地局80から道路状況を受信できると(S448:Yes)、ECU50は、閾値算出・設定処理を実行し(S450)、トリガ判定処理を実行する(S452)。
S450の閾値算出・設定処理、およびS452のトリガ判定処理は、第1実施形態の図3および図4でそれぞれ実行される閾値算出・設定処理、トリガ判定処理と実質的に同一である。
【0091】
(道路状況設定処理)
図6の(B)は、リモート基地局80が実行する道路状況設定処理である。リモート基地局80は、車両位置を送信してくる車両から道路状況を問い合わせされると(S460:Yes)、受信した車両位置と地図データベースとに基づいて道路状況を設定し、設定した道路状況を該当車両に送信する(S462)。
【0092】
第2実施形態では、ナビECU40が参照する地図データが古かったり、ナビECU40が設定する道路状況の精度が低かったりするために、適切な道路状況をナビECU40から取得できない場合にも、自車両からリモート基地局80に送信する車両位置に基づいて、リモート基地局80から適切な道路状況を取得することができる。
【0093】
ナビECU40に道路状況を出力する機能がない場合にも、自車両からリモート基地局80に車両位置を送信することにより、リモート基地局80から適切な道路状況を取得することができる。
【0094】
第2実施形態では、GPS20およびナビECU40が本発明の位置検出装置に相当する。
また、第2実施形態において、図6のS440、S442およびS448において、ナビECU40から車両位置を取得し、取得した車両位置をリモート基地局80に送信してリモート基地局80から道路状況を受信する処理が本発明の道路状況取得手段が実行する機能に相当し、S446の処理およびS450において閾値を設定する処理が本発明の閾値取得手段が実行する機能に相当し、S452において車両挙動を判定条件と比較する処理が本発明の挙動判定手段が実行する機能に相当し、S452において運転情報をメモリ62に記憶する処理が本発明の記憶手段が実行する機能に相当する。
【0095】
[第3実施形態]
図7に、第3実施形態による車両の運転情報記憶システム14を示す。運転情報記憶システム14において、ECU50は、ナビECU40から道路状況を取得し、取得した道路状況と自車両の車種とVINとを通信機器70からリモート基地局80に送信し、リモート基地局80から道路状況および車種に応じた判定条件の閾値を通信機器70により受信して取得する。
【0096】
次に、ECU50が実行する運転情報記憶処理と、リモート基地局80が実行する閾値設定処理について、図8に基づいて説明する。
(運転情報記憶処理)
図8の(A)は、運転情報記憶処理のメイン処理を示すフローチャートであり、例えば100ms毎に実行される。
【0097】
まずECU50は、スロットル開度閾値および車両挙動の継続時間閾値として、スロッ
トル開度閾値=4.5°、継続時間閾値=1500msをメモリ60から読み出して取得し(S470)、ナビECU40から道路状況を受信したか否かを判定する(S472)。
【0098】
第1実施形態で述べたように、ナビECU40は、車両の走行道路がカーブ、坂など、直線道路が継続しないときに、車内LAN等で道路状況を送信する。ナビECU40から道路状況を受信していない場合(S472:No)、ECU50はS482に処理を移行する。
【0099】
ナビECU40から道路状況を受信している場合(S472:Yes)、ECU50は、道路状況と自車両の車種とVINとを通信機器70からリモート基地局80に送信し、道路状況および車種に対応した判定条件の閾値を問い合わせる(S474)。
【0100】
S476は、車両からの閾値の問い合わせに対しリモート基地局80が実行する閾値設定処理であり、処理内容は後述する。
次に、ECU50は、リモート基地局80から閾値を受信したか否かを判定する(S478)。通信異常等により、リモート基地局80から閾値を受信できない場合(S478:No)、ECU50はS482に処理を移行する。
【0101】
リモート基地局80から閾値を受信すると(S478:Yes)、ECU50は、リモート基地局80から受信した閾値を判定条件の閾値として設定する(S480)。
そして、S482においてECU50は、トリガ判定処理を実行する(S482)。S482のトリガ判定処理は、第1実施形態の図4で実行されるトリガ判定処理と実質的に同一である。
【0102】
(閾値設定処理)
図8の(B)は、リモート基地局80が実行する閾値設定処理である。リモート基地局80は、道路状況および車種を送信してくる車両から道路状況および車種に対応した閾値を問い合わせされると(S490:Yes)、受信した道路状況および車種に基づいて、閾値データベースから道路状況および車種に対応する閾値を取得し、該当車両に送信する(S492)。
【0103】
第3実施形態では、道路状況および車種をリモート基地局80に送信し、リモート基地局80から道路状況と車種とに対応した閾値を受信して取得するので、自車両で取得する範囲の閾値とは異なる閾値をリモート基地局80から取得できる。
【0104】
例えば、該当車種の発売開始後から一定期間に合わせて通常とは異なる判定条件を満たす車両挙動が発生するときの運転情報を記憶したい場合、あるいは該当車種で予期せぬ異常な車両挙動が発生してユーザからのクレームが頻発するために特定の異常挙動が発生するときの運転情報を記憶したい場合、これら条件に合わせてリモート基地局80で設定された閾値をリモート基地局から取得できる。
【0105】
その結果、ディーラ等に車両を持ち込むことなく、前述した条件に応じた閾値を取得できる。
第3実施形態において、図8のS470の処理、S478でリモート基地局80から閾値を受信する処理、およびS480の処理が本発明の閾値取得手段が実行する機能に相当し、S472においてナビECU40から道路状況を受信する処理が本発明の道路状況取得手段が実行する機能に相当し、S482において車両挙動を判定条件と比較する処理が本発明の挙動判定手段が実行する機能に相当し、S482において運転情報をメモリ62に記憶する処理が本発明の記憶手段が実行する機能に相当する。
【0106】
[第4実施形態]
図9に、第4実施形態による車両の運転情報記憶システム16を示す。運転情報記憶システム16においてECU50は、車種とVINとナビECU40から取得した車両位置とを通信機器70からリモート基地局80に送信し、リモート基地局80において車両位置および車種に基づいて設定された閾値を通信機器70により受信して取得する。
【0107】
次に、ECU50が実行する運転情報記憶処理と、リモート基地局80が実行する閾値設定処理とについて、図10に基づいて説明する。尚、S506〜S510の処理は、図8のS478〜S482の処理と実質的に同一であるから説明を省略する。
【0108】
(運転情報記憶処理)
図10の(A)は、運転情報記憶処理のメイン処理を示すフローチャートであり、例えば100ms毎に実行される。
【0109】
ECU50は、ナビECU40から自車両の位置を取得し(S500)、通信機器70からリモート基地局80に自車両の位置と車種とVINとを送信し、車両位置および車種に対応した判定条件の閾値を問い合わせる(S502)。
【0110】
S504は、車両からの閾値の問い合わせに対しリモート基地局80が実行する閾値設定処理であり、処理内容は後述する。
(閾値設定処理)
図10の(B)は、リモート基地局80が実行する閾値設定処理である。
【0111】
リモート基地局80は、車両位置および車種を送信してくる車両から車両位置および車種に対応した閾値を問い合わせされると(S520:Yes)、受信した車両位置と地図データベースとに基づいて車両が走行している道路状況を設定し、この道路状況および車種に対応した閾値を閾値データベースから取得して該当車両に送信する(S522)。
【0112】
第4実施形態では、車両位置および車種をリモート基地局80に送信し、リモート基地局80において車両位置に基づいた道路状況を取得するので、ナビECU40が参照する地図データが古かったり、ナビECU40が設定する道路状況の精度が低かったりするために、適切な道路状況をナビECU40から取得できない場合にも、リモート基地局80において適切な道路状況を取得ができる。
【0113】
また、ナビECU40に道路状況を出力する機能がない場合にも、自車両からリモート基地局80に送信する車両位置に基づいて、リモート基地局80において適切な道路状況を取得ができる。
【0114】
また、第4実施形態では、リモート基地局80から道路状況と車種とに対応した閾値を受信して取得するので、自車両で取得する範囲の閾値とは異なる閾値をリモート基地局80から取得できる。
【0115】
例えば、該当車種の発売開始後から一定期間に合わせて通常とは異なる判定条件を満たす車両挙動が発生するときの運転情報を記憶したい場合、あるいは該当車種で予期せぬ異常な車両挙動が発生してユーザからのクレームが頻発するために特定の異常挙動が発生するときの運転情報を記憶したい場合、これら条件に合わせてリモート基地局80で設定された閾値をリモート基地局から取得できる。
【0116】
その結果、ディーラ等に車両を持ち込むことなく、前述した条件に応じた閾値を取得で
きる。
第4実施形態において、図10のS500、S502、S506およびS508において、ナビECU40から車両位置を取得し、取得した車両位置をリモート基地局80に送信し、リモート基地局80から閾値を受信して設定する処理が本発明の閾値取得手段が実行する機能に相当し、S510において車両挙動を判定条件と比較する処理が本発明の挙動判定手段が実行する機能に相当し、S510において運転情報をメモリ62に記憶する処理が本発明の記憶手段が実行する機能に相当する。
【0117】
[第5実施形態]
第5実施形態による車両の運転情報記憶システムは第1実施形態の運転情報記憶システム10と実質的に同一である。
【0118】
(運転情報記憶処理)
ECU50が実行する運転情報記憶処理を図11〜図14に基づいて説明する。
図11は、運転情報記憶処理のメイン処理を示すフローチャートであり、例えば100ms毎に実行される。図11のメイン処理では、以下に説明するS530のトリガ判定処理1、S532のトリガ判定処理2、S534の運転情報記憶処理が実行される。
【0119】
次に、図12の(A)にトリガ判定処理1を示し、図12の(B)にトリガ判定処理2を示す。トリガ判定処理1、2では、車両挙動を判定する判定条件として、スロットル開度および継続時間の閾値が異なっている。
【0120】
(トリガ判定処理1)
図12の(A)のS540においてECU50は、継続時間1をカウントアップする。そして、スロットル開度が4.5°以上かつアクセルオフであれば(S542:Yes)、S544に処理を移行し、スロットル開度が4.5°未満またはアクセルオンであれば(S542:No)、S548に処理を移行する。
【0121】
S544においてECU50は、継続時間1が1500ms以上経過したか否かを判定する。継続時間1が1500ms未満の場合(S544:No)、ECU50は本処理を終了する。継続時間1が1500ms以上経過している場合(S544:Yes)、ECU50は一時記憶処理1を実行し(S546)、S548に処理を移行する。S546の一時記憶処理1では、運転情報と運転情報を記憶する時刻とが一時的に記憶される。S548においてECU50は、継続時間1をリセットする。
【0122】
このように、トリガ判定処理1では、スロットル開度が4.5°以上かつアクセルオフであるか否か、ならびに継続時間1が1500ms以上経過したか否かを仮判定する。
(トリガ判定処理2)
図12の(B)のS550においてECU50は、継続時間2をカウントアップする。そして、スロットル開度が4.0°以上かつアクセルオフであれば(S552:Yes)、S554に処理を移行し、スロットル開度が4.0°未満またはアクセルオンであれば(S552:No)、S558に処理を移行する。
【0123】
S554においてECU50は、継続時間2が1000ms以上経過したか否かを判定する。継続時間1が1000ms未満の場合(S554:No)、ECU50は本処理を終了する。継続時間1が1000ms以上経過している場合(S554:Yes)、ECU50は一時記憶処理2を実行し(S556)、S558に処理を移行する。S556の一時記憶処理2では、運転情報と運転情報を記憶する時刻とが一時的に記憶される。S558においてECU50は、継続時間2をリセットする。
【0124】
このように、トリガ判定処理2では、スロットル開度が4.0°以上かつアクセルオフであるか否か、ならびに継続時間1が1000ms以上経過したか否かを仮判定する。
以上説明したように、判定条件を規定するスロットル開度および継続時間の閾値が、トリガ判定処理1では4.5°と1500ms、トリガ判定処理2では4.0°と1000msと異なっており、トリガ判定処理1の方がトリガ判定処理2よりも車両挙動が判定条件を満たしにくくなっている。
【0125】
したがって、例えば、トリガ判定処理2は道路状況がカーブの場合に車両挙動が判定条件を満たすか否かの判定用、トリガ判定処理1は道路状況がカーブよりも車両挙動が判定条件を満たしにくい直線道路の場合に車両挙動が判定条件を満たすか否かの判定用に使用される。
【0126】
そして、トリガ判定処理1、2において、道路状況に関わらず閾値の異なる判定条件を車両挙動が満たすか否かを予め判定し、車両挙動が判定条件を満たす場合に、そのときの運転情報と記憶時刻とを一時的に記憶する。
【0127】
尚、トリガ判定処理1、2の一時記憶処理1、2で運転情報および記憶時刻を記憶する領域は異なっているので、閾値の異なる複数の判定条件を車両挙動が満たす場合にも、それぞれの運転情報を記憶できる。
【0128】
次に、図12の(A)のS546で実行される一時記憶処理1を図13の(A)に示し、図12の(B)のS556で実行される一時記憶処理2を図13の(B)に示す。
(一時記憶処理1)
図13の(A)において、ECU50は記憶フラグ1をオンにする(S560)。そして、運転情報を一時的に記憶する現在時刻を記憶時刻1として、さらにトリガ判定処理1において車両挙動が判定条件を満たしたときの運転情報を記憶データ1として、メモリ60を構成するRAMに一時的に記憶する(S562、S564)。
【0129】
(一時記憶処理2)
図13の(B)において、ECU50は記憶フラグ2をオンにする(S570)。そして、運転情報を一時的に記憶する現在時刻を記憶時刻2として、さらにトリガ判定処理2において車両挙動が判定条件を満たしたときの運転情報を記憶データ2として、メモリ60を構成するRAMに一時的に記憶する(S574)。
【0130】
前述したように、一時記憶処理1、2において、運転情報と運転情報を記憶する現在時刻とは異なる領域に記憶される。
(運転情報記憶処理)
次に、図11のS534で実行される運転情報記憶処理を図14に示す。図14の運転情報記憶処理は、道路状況に関わらず、閾値の異なる判定条件を車両挙動が満たしている場合に図13の一時記憶処理1、2でメモリ60に一時的に記憶された運転情報のうち、車両が実際に走行する道路状況に対応する運転情報を正式にメモリ62に記憶する処理である。
【0131】
S580においてECU50は、道路状況がカーブ中であるか否かを判定する。道路状況がカーブ中の場合(S580:Yes)、ECU50はS582に処理を移行し、道路状況がカーブ中ではない場合(S580:No)、ECU50はS582〜S592の処理を実行せずS594に処理を移行する。
【0132】
S582においてECU50は、記憶フラグ1がオンであるか否か、つまり道路状況が直緯道路に対応する判定条件を車両挙動が満たしたために一時記憶処理1で運転情報が記
憶されたか否かを判定する。
【0133】
記憶フラグ1がオンの場合(S582:Yes)、ECU50は、一時記憶処理1において運転情報を記憶した記憶時刻1から道路状況がカーブ中の現在時刻までの経過時間が10s未満であるか否かを判定する(S584)。
【0134】
記憶フラグ1がオンで(S582:Yes)、記憶時刻1から道路状況がカーブ中の現在時刻までの経過時間が10s未満の場合(S584:Yes)、ECU50は、一時記憶処理1で運転情報を記憶してからカーブを走行中の現在時刻までに10s経過していないので、車両がカーブに進入する10s前よりも後の記憶時刻1で一時記憶処理1において運転情報が記憶されたと判断する。
【0135】
車両がカーブに進入する10s前よりも後の記憶時刻1においては、道路状況がカーブの手前またはカーブ中であり減速操作がなされると推定される。この場合、ECU50は、道路状況が直線道路用に設定された一時記憶処理1で記憶した運転情報は不適切であると判断し、記憶フラグ1をオフに設定し(S586)、S588に処理を移行する。
【0136】
このように、車両がカーブに進入する10s前よりも後で直線道路用に設定された一時記憶処理1において記憶フラグ1がオンになっても、記憶時刻1から10s以上経過する前にS586で記憶フラグ1はオフに設定される。その結果、車両がカーブに進入する10s前よりも後で一時記憶処理1において記憶フラグ1がオンになる場合、S584の判定は「No」にならない。
【0137】
記憶フラグ1がオフになると、一時記憶処理1でメモリ60に記憶された運転情報はメモリ62に正式に記憶されない。
記憶フラグ1がオフの場合(S582:No)、一時記憶処理1で運転情報は記憶されていないので、ECU50は記憶フラグ1をオフにすることなくS588に処理を移行する。
【0138】
記憶フラグ1がオンで(S582:Yes)、かつ記憶時刻1から道路状況がカーブ中の現在時刻までの経過時間が10s以上の場合(S584:No)、ECU50は、一時記憶処理1で運転情報を記憶してからカーブに進入するまでに10s以上経過しており、直線道路用に設定された一時記憶処理1で運転情報を記憶したときの道路状況はカーブの手前ではなく直線道路であったと判断する。
【0139】
この場合、一時記憶処理1で記憶した運転情報は道路状況に対応しているので、ECU50は、記憶フラグ1をオフにせずS588に処理を移行する。
S588においてECU50は、記憶フラグ2がオンであるか否か、つまり道路状況がカーブの場合に対応する判定条件を車両挙動が満たしたために一時記憶処理2で運転情報が記憶されたか否かを判定する。
【0140】
記憶フラグ2がオンの場合(S588:Yes)、ECU50は、一時記憶処理2において運転情報を記憶した記憶時刻2から道路状況がカーブ中の現在時刻までの経過時間が10s未満であるか否かを判定する(S590)。
【0141】
記憶フラグ2がオンで(S588:Yes)、記憶時刻2から道路状況がカーブ中の現在時刻までの経過時間が10s未満の場合(S590:Yes)、ECU50は、一時記憶処理2で運転情報を記憶してからカーブを走行中の現在時刻までに10s以上経過していないので、車両がカーブに進入する10s前よりも後の記憶時刻2で一時記憶処理2において運転情報が記憶されたと判断する。
【0142】
車両がカーブに進入する10s前よりも後の記憶時刻2においては、道路状況がカーブの手前またはカーブ中であり減速操作がなされると推定される。この場合、ECU50は、道路状況がカーブ用に設定された一時記憶処理2で記憶した運転情報は適切であると判断し、メモリ60に一時的に記憶されている記憶データ2を、運転情報としてメモリ62に正式に記憶して記憶フラグ2をオフに設定し(S592)、S594に処理を移行する。
【0143】
記憶フラグ2がオフの場合(S588:No)、ECU50は、一時記憶処理2で運転情報が記憶されなかったと判断し、S594に処理を移行する。
記憶フラグ2がオンで(S588:Yes)、かつ記憶時刻2から道路状況がカーブ中の現在時刻までの経過時間が10s以上の場合(S590:No)、ECU50は、一時記憶処理2で運転情報を記憶してからカーブに進入するまでに10s以上経過しており、カーブ用に設定された一時記憶処理2で運転情報を記憶したときの道路状況はカーブの手前ではなく直線道路であったと判断する。
【0144】
この場合、ECU50は、一時記憶処理2でメモリ60に記憶した運転情報をメモリ62に記憶せず、S594に処理を移行する。記憶フラグ2がオンであってもS590の判定が「No」であればS592は実行されないので、記憶フラグ2をオフに設定していない。
【0145】
S594においてECU50は、記憶フラグ1がオンであるか否かを判定する。記憶フラグ1がオンであり(S594:Yes)、一時記憶処理1において運転情報を記憶した記憶時刻1から現在時刻までの経過時間が10s以上の場合(S596:Yes)、ECU50は、一時記憶処理1で運転情報を記憶してからカーブに進入するまでに10s以上経過しており、直線道路用に設定された一時記憶処理1で運転情報を記憶したときの道路状況はカーブの手前ではなく直線道路であったと判断する。
【0146】
したがって、ECU50は、メモリ60に一時的に記憶されている記憶データ1は適切であると判断し、運転情報として記憶データ1をメモリ62に正式に記憶して記憶フラグ1をオフに設定し(S598)、本処理を終了する。
【0147】
記憶フラグ1がオンであり(S594:Yes)、一時記憶処理1において運転情報を記憶した記憶時刻1から現在時刻までの経過時間が10s未満の場合(S596:No)、現在の道路状況がカーブ中であれば、S586で記憶フラグ1はオフに設定されていたはずであるから、現在の道路状況はカーブ中ではなく、カーブの手前も含め直線であると判断できる。
【0148】
ただし、記憶時刻1から現在時刻までの経過時間が10s未満であるので、ECU50は、道路状況がカーブの手前か直線道路かが確定していないと判断し、本処理を終了する。
【0149】
記憶フラグ1がオフの場合(S594:No)、一時記憶処理2で運転情報は記憶されていないので、ECU50は本処理を終了する。
以上説明したように、第5実施形態では、道路状況に関わらず、予め閾値の異なる判定条件を車両挙動が満たす場合に運転情報を一時的に記憶し、車両が実際に走行する道路状況が一時的に記憶した運転情報に対応する道路状況の場合に、一時的に記憶した道路情報を正式情報として記憶します。
【0150】
これにより、車両の進行方向で道路が分岐し、例えば直線とカーブのように道路状況が
異なっていても、予め分岐先の道路状況に対応する閾値の異なる判定条件を車両挙動が満たす場合に、運転情報を一時的に記憶しておくことにより、車両が分岐先のいずれの道路状況を走行しても、車両挙動が判定条件を満たす場合に、一時的に記憶されている運転情報から適切な運転情報を選択して記憶できる。
【0151】
第5実施形態において、図12の(A)のS542、S544、ならびに図12の(B)のS552、S554でスロットル開度と継続時間とをそれぞれ閾値と比較するときに閾値を参照する処理が本発明の閾値取得手段が実行する機能に相当し、図12の(A)のS542、S544、ならびに図12の(B)のS552、S554でスロットル開度と継続時間とをそれぞれ閾値と比較する処理が本発明の挙動判定手段が実行する機能に相当する。
【0152】
また、図13の(A)のS564および図13の(B)のS574において運転情報を一時的に記憶する処理が本発明の一時記憶手段が実行する機能に相当する。
また、図14のS580において道路状況がカーブ中であるか否かを判定するときに道路状況を取得する処理が本発明の道路状況取得手段が実行する機能に相当し、S592およびS598で記憶データ1、2を正式に記憶する処理が本発明の記憶手段が実行する機能に相当する。
【0153】
[他の実施形態]
上記実施形態では、車両挙動と比較する判定条件の閾値として、スロットル開度と車両挙動の継続時間とを例示した。判定条件の閾値はこれに限らず、車速等を判定条件の閾値としてもよい。
【0154】
第5実施形態では、道路状況に関わらず、予め異なる閾値でそれぞれ規定される判定条件と比較される道路状況として、カーブと、カーブよりも閾値が大きく車両が加速状態であると判定されにくい直線道路とを例示した。これに対し、カーブおよび直線道路と判定条件の閾値が異なる道路状況を、カーブおよび直線道路に加えて判定条件と比較してもよい。
【0155】
また、運転情報を記憶する記憶部は、自ECU50に搭載している記憶部に限らず他の記憶部であってもよい。また、運転情報を正式に記憶する記憶部は、SRAMまたはEEPROMに限らず、車両の運転停止中もデータを保持できるのであればどのような記憶部でもよい。
【0156】
本発明は、ガソリンエンジンまたはディーゼルエンジン等の内燃機関を駆動源とする車両、あるいは内燃機関とモータとを併用したハイブリッド車両、あるいはモータを駆動源とする電気自動車のいずれに適用してもよい。
【0157】
このように、本発明は、上記実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々の実施形態に適用可能である。
【符号の説明】
【0158】
10、12、14、16:運転情報記憶システム、20:GPS(位置検出装置)、40:ナビECU(ナビゲーション装置、位置検出装置)、50:ECU(電子制御装置、閾値取得手段、挙動判定手段、記憶手段、一時記憶手段、道路状況取得手段)、52:閾値設定部(道路状況取得手段、閾値取得手段)、54:トリガ判定部(挙動判定手段)、56:運転情報記憶部(記憶手段)、60、62:メモリ(記憶部)、80:リモート基地局
【特許請求の範囲】
【請求項1】
判定条件を満たす車両挙動が発生すると車両の所定の運転情報を記憶する電子制御装置において、
車両が走行する道路状況に対応する前記判定条件を規定する異なる閾値を取得する閾値取得手段と、
前記閾値取得手段が取得する前記閾値により規定される前記判定条件を前記車両挙動が満たすか否かを判定する挙動判定手段と、
前記閾値取得手段が取得する前記閾値により規定される前記判定条件を前記車両挙動が満たすと前記挙動判定手段が判定すると、前記運転情報を記憶部に記憶する記憶手段と、を備えることを特徴とする電子制御装置。
【請求項2】
自車両に搭載されたナビゲーション装置から前記道路状況を取得する道路状況取得手段を備えることを特徴とする請求項1に記載の電子制御装置。
【請求項3】
前記閾値取得手段は、自車両の車種と前記道路状況取得手段が前記ナビゲーション装置から取得する前記道路状況とをリモート基地局に送信し、前記リモート基地局から前記道路状況および前記車種に対応する前記閾値を受信して取得することを特徴とする請求項2に記載の電子制御装置。
【請求項4】
自車両に搭載された位置検出装置から取得する自車両の位置をリモート基地局に送信し、前記リモート基地局から自車両の位置に対応する前記道路状況を受信して取得する道路状況取得手段を備えることを特徴とする請求項1に記載の電子制御装置。
【請求項5】
前記挙動判定手段は、前記閾値取得手段が取得する複数の異なる前記閾値によりそれぞれ規定される前記判定条件を前記車両挙動が満たすか否かを、車両が走行している前記道路状況に関わらず仮判定し、
複数の異なる前記閾値により規定される前記判定条件の少なくともいずれか一つを前記車両挙動が満たすと前記挙動判定手段が仮判定するときの前記運転情報を記憶部に一時的に記憶する一時記憶手段をさらに備え、
前記記憶手段は、前記挙動判定手段による仮判定後に、前記記憶部に一時的に記憶されている前記運転情報のうち、前記道路状況取得手段が取得する車両が実際に走行した前記道路状況に対応する前記運転情報を正式に前記記憶部に記憶する、
ことを特徴とする請求項2から4のいずれか一項に記載の電子制御装置。
【請求項6】
前記閾値取得手段は、前記道路状況に対応する前記閾値を算出することを特徴とする請求項2から5のいずれか一項に記載の電子制御装置。
【請求項7】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況に基づいて車両が減速操作されると推定される場合、車両が減速操作されると推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しやすくなる方向に前記閾値を設定することを特徴とする請求項2から6のいずれか一項に記載の電子制御装置。
【請求項8】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況がカーブの手前の場合、車両が減速操作されると推定し、車両が減速操作されると推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しやすくなる方向に前記閾値を設定することを特徴とする請求項7に記載の電子制御装置。
【請求項9】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況が下り坂の場合、
車両が減速操作されると推定し、車両が減速操作されると推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しやすくなる方向に前記閾値を設定することを特徴とする請求項7または8に記載の電子制御装置。
【請求項10】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況が公共駐車場の場合、車両が減速操作されると推定し、車両が減速操作されると推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しやすくなる方向に前記閾値を設定することを特徴とする請求項7から9のいずれか一項に記載の電子制御装置。
【請求項11】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況に基づいて、車両が加速操作されると推定される場合、車両が加速操作されると推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しにくくなる方向に前記閾値を設定することを特徴とする請求項2から10のいずれか一項に記載の電子制御装置。
【請求項12】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況が上り坂の場合、車両が加速操作されると推定し、車両が加速操作されると推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しにくくなる方向に前記閾値を設定することを特徴とする請求項11に記載の電子制御装置。
【請求項13】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況に基づいて、車両の加速状態が前記判定条件を満たしやすいと推定される場合、前記判定条件を満たしやすいと推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しにくくなる方向に前記閾値を設定することを特徴とする請求項2から12のいずれか一項に記載の電子制御装置。
【請求項14】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況が未舗装道路または工事中道路の場合、車両の加速状態が前記判定条件を満たしやすいと推定し、前記判定条件を満たしやすいと推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しにくくなる方向に前記閾値を設定することを特徴とする請求項13に記載の電子制御装置。
【請求項15】
前記閾値取得手段は、自車両に搭載された位置検出装置から取得する自車両の位置と自車両の車種とをリモート基地局に送信し、前記リモート基地局から自車両の位置に対応する前記道路状況と前記車種とに対応する前記閾値を受信して取得することを特徴とする請求項1に記載の電子制御装置。
【請求項1】
判定条件を満たす車両挙動が発生すると車両の所定の運転情報を記憶する電子制御装置において、
車両が走行する道路状況に対応する前記判定条件を規定する異なる閾値を取得する閾値取得手段と、
前記閾値取得手段が取得する前記閾値により規定される前記判定条件を前記車両挙動が満たすか否かを判定する挙動判定手段と、
前記閾値取得手段が取得する前記閾値により規定される前記判定条件を前記車両挙動が満たすと前記挙動判定手段が判定すると、前記運転情報を記憶部に記憶する記憶手段と、を備えることを特徴とする電子制御装置。
【請求項2】
自車両に搭載されたナビゲーション装置から前記道路状況を取得する道路状況取得手段を備えることを特徴とする請求項1に記載の電子制御装置。
【請求項3】
前記閾値取得手段は、自車両の車種と前記道路状況取得手段が前記ナビゲーション装置から取得する前記道路状況とをリモート基地局に送信し、前記リモート基地局から前記道路状況および前記車種に対応する前記閾値を受信して取得することを特徴とする請求項2に記載の電子制御装置。
【請求項4】
自車両に搭載された位置検出装置から取得する自車両の位置をリモート基地局に送信し、前記リモート基地局から自車両の位置に対応する前記道路状況を受信して取得する道路状況取得手段を備えることを特徴とする請求項1に記載の電子制御装置。
【請求項5】
前記挙動判定手段は、前記閾値取得手段が取得する複数の異なる前記閾値によりそれぞれ規定される前記判定条件を前記車両挙動が満たすか否かを、車両が走行している前記道路状況に関わらず仮判定し、
複数の異なる前記閾値により規定される前記判定条件の少なくともいずれか一つを前記車両挙動が満たすと前記挙動判定手段が仮判定するときの前記運転情報を記憶部に一時的に記憶する一時記憶手段をさらに備え、
前記記憶手段は、前記挙動判定手段による仮判定後に、前記記憶部に一時的に記憶されている前記運転情報のうち、前記道路状況取得手段が取得する車両が実際に走行した前記道路状況に対応する前記運転情報を正式に前記記憶部に記憶する、
ことを特徴とする請求項2から4のいずれか一項に記載の電子制御装置。
【請求項6】
前記閾値取得手段は、前記道路状況に対応する前記閾値を算出することを特徴とする請求項2から5のいずれか一項に記載の電子制御装置。
【請求項7】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況に基づいて車両が減速操作されると推定される場合、車両が減速操作されると推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しやすくなる方向に前記閾値を設定することを特徴とする請求項2から6のいずれか一項に記載の電子制御装置。
【請求項8】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況がカーブの手前の場合、車両が減速操作されると推定し、車両が減速操作されると推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しやすくなる方向に前記閾値を設定することを特徴とする請求項7に記載の電子制御装置。
【請求項9】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況が下り坂の場合、
車両が減速操作されると推定し、車両が減速操作されると推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しやすくなる方向に前記閾値を設定することを特徴とする請求項7または8に記載の電子制御装置。
【請求項10】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況が公共駐車場の場合、車両が減速操作されると推定し、車両が減速操作されると推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しやすくなる方向に前記閾値を設定することを特徴とする請求項7から9のいずれか一項に記載の電子制御装置。
【請求項11】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況に基づいて、車両が加速操作されると推定される場合、車両が加速操作されると推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しにくくなる方向に前記閾値を設定することを特徴とする請求項2から10のいずれか一項に記載の電子制御装置。
【請求項12】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況が上り坂の場合、車両が加速操作されると推定し、車両が加速操作されると推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しにくくなる方向に前記閾値を設定することを特徴とする請求項11に記載の電子制御装置。
【請求項13】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況に基づいて、車両の加速状態が前記判定条件を満たしやすいと推定される場合、前記判定条件を満たしやすいと推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しにくくなる方向に前記閾値を設定することを特徴とする請求項2から12のいずれか一項に記載の電子制御装置。
【請求項14】
前記閾値取得手段は、前記道路状況取得手段が取得する前記道路状況が未舗装道路または工事中道路の場合、車両の加速状態が前記判定条件を満たしやすいと推定し、前記判定条件を満たしやすいと推定されない場合に比べ、車両の加速状態が前記判定条件を満たしていると前記挙動判定手段が判定しにくくなる方向に前記閾値を設定することを特徴とする請求項13に記載の電子制御装置。
【請求項15】
前記閾値取得手段は、自車両に搭載された位置検出装置から取得する自車両の位置と自車両の車種とをリモート基地局に送信し、前記リモート基地局から自車両の位置に対応する前記道路状況と前記車種とに対応する前記閾値を受信して取得することを特徴とする請求項1に記載の電子制御装置。
【図1】



【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−80431(P2013−80431A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2011−221120(P2011−221120)
【出願日】平成23年10月5日(2011.10.5)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成23年10月5日(2011.10.5)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]