
非同期性の検出
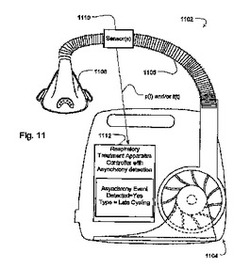
コントローラ又はプロセッサ(複数の場合もある)1112が、呼吸治療装置1102又は人工呼吸器の使用に関連付けられた、非同期性のような、呼吸に関連する条件の検出を実施する。呼吸治療に関連付けられたセンサ信号から導出されるデータに基づいて、検出器は特徴集合の検出値を評価し、それらの値を1組のしきい値と比較すること等によって、患者の呼吸サイクルの一度の呼吸において非同期性が生じるか否かを判断することができる。検出処理に関連する特定の特徴集合及び1つ又は複数のしきい値に基づいて、種々の事象を特定することもできる。種々の非同期性事象分類器を設計するために、特徴集合の自動判定を実施することもできる。それらの方法は、コンピュータによって、又は呼吸治療装置によって実施することができる。その際、そのような非同期性事象の検出は、呼吸治療装置によって生成される呼吸治療の制御パラメータに対する自動調整のための制御ロジックの一部としての役割を果たすこともできる。
【発明の詳細な説明】
【技術分野】
【0001】
(関連出願の相互参照)
本出願は、2009年4月22日に出願の米国仮特許出願第61/171,606号の出願日の利益を主張し、該仮特許出願は、その開示内容を参照することにより、本明細書の一部をなすものとする。
【0002】
本技術は、非同期性を示す条件のような、呼吸治療に関連する条件又は事象を検出するための方法及び装置に関する。
【背景技術】
【0003】
患者と該患者の呼吸治療装置との間の高品質の相互作用を確保することが重要となる可能性がある。例えば、患者と該患者の人工呼吸器との間の高品質の相互作用は、患者の呼吸仕事量を最小限に抑えるのに不可欠である。患者−人工呼吸器の非同期性によって引き起こされる呼吸仕事量の増加は、おもわしくない患者の予後に結び付いており、非常に蔓延していることがわかっている。調査によれば、人工呼吸器によって送達される呼吸の47%までが非同期性となる可能性があることがわかっている。
【0004】
人工呼吸器の設定を適切に監視し、調整することによって、臨床医が非同期性を手動で軽減することができる。しかしながら、非同期性を監視することは難しい問題である。その存在を知るには、人工呼吸器によって送達される気道内圧、患者の気流、及びバルーンカテーテルを介して非侵襲的に測定される横隔膜EMG又は食道内圧のような、吸気活動の指標を、高分解能でかつリアルタイムに表示することが必要とされる場合がある。さらに、患者−人工呼吸器の相互作用の品質を診断するには、これらの信号を専門家が目で見て解釈することが不可欠である可能性がある。
【0005】
呼吸治療装置を改善することができる、非同期性を自動的に検出するための更なる方法及び装置を開発することが望ましい場合がある。
【発明の概要】
【0006】
本技術の態様は、非同期性を検出するための方法及び装置を含む。
【0007】
本技術のまた更なる態様は、非同期性を検出するためのデバイスを開発するための方法及び装置を含む。
【0008】
1つのそのような実施形態例では、同期した呼吸治療の送達を制御する呼吸治療装置の非同期性を検出するための自動処理方法が提供される。本方法は、前記呼吸治療装置と結合された少なくとも1つのセンサの信号から導出されるデータを用いて特徴集合の検出値を求めることを含むことができる。本方法は、プロセッサを用いて、前記検出値の特徴集合を1組のしきい値と比較することを更に含むことができる。本方法は、前記プロセッサを用いて、前記比較に基づいて、前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定することを更に含むことができる。
【0009】
別の実施形態では、同期した呼吸治療と呼吸サイクルとの間の非同期性を検出するための装置が提供される。本装置は、前記呼吸治療装置と結合された少なくとも1つのセンサの信号から導出される検出値の特徴集合を表すデータを含むメモリを備えることができる。本装置は、前記データにアクセスするためのプロセッサを備えることができる。該プロセッサは、前記検出値の特徴集合のデータと前記メモリの1組のしきい値との比較を制御するように構成することができる。プロセッサは、前記比較に基づく前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生の判定を制御するように構成することもできる。さらに、プロセッサは、前記非同期性事象の発生を表す出力の生成を制御するように構成することができる。
【0010】
いくつかの実施形態において、検出値の特徴集合は、呼吸数に基づく特徴、呼吸量に基づく特徴、呼吸機構に基づく特徴、呼気流形態に基づく特徴のうちのいずれか1つ又は複数を含む場合がある。
【0011】
いくつかの実施形態において、本装置又は本方法は、比較に基づいて複数の異なる非同期性事象を判定又は特定することもできる。非同期性事象は、無効呼気努力事象、ポストトリガー努力事象、ダブルトリガー事象、自動トリガー事象、後期トリガー事象、早期循環事象及び/又は無効吸気努力事象のうちのいずれか1つ又は複数とすることができる。
【0012】
一例示の実施形態では、無効吸気努力事象を検出する前記検出値の特徴集合は、(a)最大呼気流の位置以降の呼気の残りの部分の区分的双線形近似の電力、(b)移動平均呼気流の最大値と最小値との間の距離、(c)整流され、トレンドを除去された呼気流移動平均の積分、(d)吸気時定数、及び(e)前記距離及びピーク呼気流の或る割合を含むことができる。
【0013】
いくつかの実施形態において、プロセッサは、呼吸治療装置のコントローラ、又はそのコントローラの一部とすることができ、その装置は人工呼吸器とすることができ、センサは流れセンサとすることができる。その際、コントローラは、流れセンサの信号を用いて呼吸サイクルを検出し、呼吸治療をもたらすための流れ発生器制御信号を生成するように構成することができる。
【0014】
方法又は装置のいくつかの実施形態では、特徴集合は、その特徴集合が特徴の上位集合の部分集合を含むように、選択過程によって選択される。そのような選択過程は、プロセッサを用いて、複数の呼吸治療装置を用いて確立された複数の呼吸のデータにおいて生じる既知の非同期性事象のための上位集合の値を評価することを含むことができる。評価過程は、パルツェン窓推定によって、上位集合の値を用いて事後確率を計算することを含むことができ、上位集合の値群は、値を繰返し包含及び除去することによって選択される。また、その評価は、特徴の選択された部分集合を用いて非同期性事象を検出すること、及び検出された事象を既知の事象データと比較し、その部分集合の性能を試験又は評価することも含むことができる。
【0015】
いくつかの実施形態では、その装置は、患者に対して呼吸可能ガスの流れを搬送するための患者インターフェースを備えることができる。また、その装置は、患者インターフェースと結合され、患者インターフェースを通して呼吸可能ガスの流れを生成するための流れ発生器を備える。また、その装置は、圧力変換器又は差圧変換器のような変換器を備える場合もある。その変換器は、患者インターフェースを通って流れる患者流を示す信号を与えることができる。プロセッサは、流れ発生器のコントローラとしての役割を果たすことができ、該コントローラは、流れセンサの信号を用いて呼吸サイクルを検出し、呼吸治療をもたらすための流れ発生器制御信号を生成するように構成される。
【0016】
いくつかの実施形態では、同期した呼吸治療と呼吸サイクルとの間の非同期性を検出するためのシステムが提供される。本システムは、呼吸治療装置の使用からもたらされる1つ又は複数の圧力変換器信号から導出されるデータを処理する処理手段を備える。前記処理手段は、(a)前記データから計算される検出値の特徴集合を1組のしきい値と比較し、(b)前記比較に基づいて、前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定するように構成することができる。本システムは、前記特徴集合が特徴の上位集合の部分集合を含むように該特徴集合を選択する分類手段を更に備えることができ、前記選択は、複数の呼吸治療装置によって確立される複数の呼吸のデータにおいて生じる既知の非同期性事象のための前記上位集合の値を評価することを含む。本システムの前記処理手段は、少なくとも1つのセンサの信号から導出されるデータを用いて前記特徴集合の前記検出値を計算するように構成することもできる。
【0017】
そのようなシステムのいくつかの実施形態では、前記検出値の特徴集合は、(a)呼吸数に基づく特徴、(b)呼吸量に基づく特徴、(c)呼吸機構に基づく特徴、(d)呼気流形態に基づく特徴からなる一群の特徴のうちの2つ以上の特徴とすることができる。
【0018】
そのようなシステムの更なる実施形態では、前記非同期性事象の発生は、(a)無効呼気努力事象、(b)事後トリガー努力事象、(c)ダブルトリガー事象、(d)自動トリガー事象、(e)後期トリガー事象、(f)早期循環事象、及び(g)後期循環事象からなる一群の非同期性事象のうちの1つの非同期性事象とすることができる。
【0019】
本システムは、呼吸可能ガスの流れを搬送するインターフェース手段と、前記インターフェース手段と結合され、前記呼吸可能ガスを生成する流れ発生手段と、前記圧力変換器信号を生成するための流れセンサとを更に備えることができる。そのようなシステムでは、前記処理手段は、前記流れ発生手段を制御して、呼吸支援人工呼吸のような同期した呼吸治療を提供するように更に構成することができる。
【0020】
いくつかの実施形態では、その方法は、メモリのような情報保持媒体上に含むことができる。例えば、情報保持媒体は、該情報保持媒体上にプロセッサ可読情報を有する場合がある。プロセッサ可読情報は、同期した呼吸治療と呼吸サイクルとの間の非同期性を検出するための装置を制御することができる。その際、プロセッサ可読情報は、呼吸治療装置と結合された少なくとも1つのセンサの信号から導出されるデータを用いて特徴集合の検出値にアクセスするための制御命令、検出値の特徴集合を1組の格納されたデータしきい値と比較するための制御命令、及び比較に基づいて、呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定するための制御命令を含むことができる。
【0021】
本技術のいくつかの実施形態では、呼吸治療装置が、流れ指標及び圧力指標に基づいて呼吸抵抗及びコンプライアンスを推定する。本装置は、流れ(flow:フロー)及び圧力を表す信号を生成するための1つ又は複数のセンサを備えることができる。本装置は、前記1つ又は複数のセンサと結合されたプロセッサも備えることができる。該プロセッサは、前記流れ信号のデータから呼吸サイクルの呼気部分を検出するのを制御するように構成することができる。プロセッサは、前記検出された呼気部分に対応する流れ、圧力及び体積指標を用いて、抵抗値及びコンプライアンス値を計算するのを制御するように構成することもできる。
【0022】
いくつかの実施形態において、検出された呼気部分は、呼気サイクルにおいて開始し、呼気サイクルの間に吐出される一回換気量が約85パーセント〜90パーセントの範囲内の限度を超えるときに終了する部分とすることができる。オプションで、流れ指標、圧力指標、及び体積指標を表すデータによる多重線形回帰分析によって、コンプライアンス値及び抵抗値を計算することができる。さらに、この値は、呼吸過程毎に計算することもできる。プロセッサは、求められた抵抗値及びコンプライアンス値の精度の評価を制御するように更に構成することができる。精度の評価は、決定係数を計算すること、及びその係数をしきい値と比較することを含むことができる。
【0023】
いくつかの実施形態において、呼吸治療装置のプロセッサは、該プロセッサによって求められた複数のコンプライアンス値に基づいてPEEP制御パラメータを求めるのを制御するように更に構成することができる。そのような過程において、プロセッサは、予め設定されたPEEP制御パラメータに対する、段階的引下げのような繰り返される変化を制御することができ、その間に複数の圧力測定値及び流れ測定値が求められる。その後、複数の圧力測定値及び流れ測定値に基づいて、複数のコンプライアンス値を求めることができる。こうして値を求めることは、複数のコンプライアンス値を表すデータから変曲点を検出することを含むことができる。
【0024】
いくつかの実施形態において、呼吸治療装置のプロセッサは、求められた複数のコンプライアンス値に基づいて、最大圧支援限界を求めるのを制御するように構成することもできる。そのような過程において、プロセッサは、予め設定されたPEEP制御パラメータに対する、段階的引下げのような繰り返される変化を制御することができ、その間に複数の圧力測定値及び流れ測定値が求められる。その後、複数の圧力測定値及び流れ測定値に基づいて、複数のコンプライアンス値を求めることができる。オプションでは、最大圧支援限界を求めることは、複数のコンプライアンス値を表すデータから変曲点を検出することを含むことができる。いくつかのそのような実施形態において、呼吸治療装置は、プロセッサと結合され、該プロセッサからの制御信号に基づいて、患者インターフェースに対して大気圧より高い圧力において呼吸可能ガス流を生成するための流れ発生器を含むこともできる。
【0025】
この技術の更なる実施形態及び特徴は、以下の詳細な開示、特許請求の範囲及び図面から明らかになるであろう。
【0026】
本技術は、限定するのではなく、一例として添付の図面において示されており、該図面では、類似の参照番号は類似の構成要素を参照する。
【図面の簡単な説明】
【0027】
【図1】本技術の非同期性検出器の一例のブロック図である。
【図2】図1の非同期性検出器のいくつかの実施形態において実施される場合がある方法の一例による流れ図である。
【図3】本非同期性検出技術を用いて検出される場合がある無効呼気努力非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図4】本非同期性検出技術を用いて検出される場合があるポストトリガー努力非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図5】本非同期性検出技術を用いて検出される場合があるダブルトリガー非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図6】本非同期性検出技術を用いて検出される場合がある自動トリガー非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図7】本非同期性検出技術を用いて検出される場合がある後期トリガー非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図8】本非同期性検出技術を用いて検出される場合がある早期循環非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図9】本非同期性検出技術を用いて検出される場合がある後期循環非同期性事象及び無効吸気努力非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図10】本技術のいくつかの実施形態において状態機械が呼吸に関連する状態を検出する図である。
【図11】非同期性検出コントローラを備える呼吸治療装置の一例の図である。
【図12】本技術の実施形態の場合に処理装置又はコントローラとして実装される場合がある適切な構成要素を示すブロック図である。
【図13】非同期性事象を手動で分類するのに適しているユーザインターフェースの一例のスクリーンショットの図である。
【図14】呼気流、及び特徴を判定することができる無効呼気努力非同期性事象の指示子を有する出力信号の自動処理又は解析のステップを示す2つのグラフである。
【図15】呼気流、及び特徴を判定することができる無効呼気努力非同期性事象の指示子を有する出力信号の自動処理又は解析の更なるステップを示す2つのグラフである。
【図16】無効呼気努力非同期性事象を検出するのに適しているいくつかの特徴を判定する際の自動解析の付加的な態様を示すグラフである。
【図17】無効呼気努力非同期性事象を検出するのに適しているいくつかの特徴を判定する際の自動解析の更に別の態様、及びそれらの特徴のうちのいくつかを示すグラフである。
【図18】ダブルトリガー非同期性事象を検出するのに適しているいくつかの特徴を判定する際の自動解析の態様、及びそれらの特徴のうちのいくつかを示すグラフである。
【図19】本技術の求められた呼吸機構値に基づく滴定法の例を示すグラフである。
【発明を実施するための形態】
【0028】
(詳細な説明)
本技術は呼吸治療の送達に関連する非同期性事象の自動検出を含む。非同期性は、患者の呼吸の実際の状態が、患者の呼吸と同期するように意図された自動呼吸治療と一致していない状況を含む。先に言及されたように、非同期性は、患者−人工呼吸器相互作用において生じる可能性がある。現在の技術を用いて、非同期性検出器を開発又は実現することができる。そのような検出器は、1つ又は複数の非同期性事象が発生したか、又は発生しつつあるか否かを判断するための役割を果たすことができる。また、1つ又は複数の異なるタイプの非同期性事象を特定又は分類するように、それらの検出器を実施することもできる。
【0029】
図1には、非同期性検出の実施形態が示される。通常、プログラムされたプロセッサのような非同期性検出器100が、同期した呼吸治療を提供する呼吸治療装置に関連付けられる1つ又は複数のセンサからのデータ又は信号にアクセスすることができる。例えば、データは、そのような装置の流れセンサ及び/又は圧力センサから取り込まれる流れf(t)及び/又は圧力p(t)信号に基づく場合がある。その後、このデータに基づいて、検出器100は、非同期性事象を検出又は特定することができる。
【0030】
例えば、いくつかの実施形態において、その検出器は、図2の流れ図において示される方法を実施することができる。220において、プロセッサが、呼吸治療装置と結合される少なくとも1つのセンサの信号から導出されるデータを用いて、特徴集合の検出値にアクセスすることができる。その後、プロセッサは、その検出値を評価することができる。例えば、222において、プロセッサは、その後、特徴集合の検出値を1組の格納されたデータしきい値と比較することができる。224において、プロセッサは、その評価又は比較に基づいて、呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定することができる。
【0031】
検出された事象の情報は、デバイスのメモリに記録することができ、かつ/又はディスプレイ装置に出力することができる。同様に、その情報は、他の処理装置を用いて精査又は解析するために送信される場合がある(例えば、有線通信又は無線通信による)。それらの事象の情報を表す格納又は記録されたデータは、例えば、事象タイプの識別情報(identification)、発生時刻、使用期間中の全ての非同期性事象の総数、使用期間中に検出された事象のタイプ毎の総数等を含む場合がある。その装置のセンサの他のデータを1つ又は複数の非同期性事象に関連付けることができ、また、非同期性事象情報とともに、更なる解析のために格納することもできる。例えば、非同期であると特定される、患者の呼吸サイクル毎の流れ(flow:フロー)及び/又は圧力信号データを格納することができる。
【0032】
いくつかの実施形態において、非同期性事象をプロセッサによってスコア化し、出力することができる。そのスコアは、特定の呼吸治療装置、又はその装置による治療セッションのための性能指標として用いることができる。例えば、そのスコアは、時間期間(例えば、治療期間)当たり、又は人工呼吸器の送達された呼吸当たりの非同期性事象の回数の比率として表すことができる。
【0033】
また、プロセッサは、スコア化された事象を解析し、呼吸治療装置の治療制御に対する変更を実施又は推奨するように構成することもできる。例えば、本明細書において更に詳細に検討されるように、検出された非同期性事象は、呼吸治療装置によって送達される圧力治療の特定の制御パラメータを自動的に変更するための処理制御ロジックの一部としての役割を果たすことができる。同様に、検出された非同期性事象は、呼吸治療装置によって送達される圧力治療の特定の制御パラメータを手動で変更することを推奨するメッセージを自動的に出力するための処理制御ロジックの一部としての役割を果たすことができる。
【0034】
検出可能な非同期性事象の例
いくつかの実施形態において、非同期性検出器100は、図3〜図9においてグラフで示される種々のタイプの非同期性事象のうちのいずれか1つ又は複数を検出するように構成することができる。本明細書において更に検討されるように、例示される事象は、無効呼気努力事象、ポストトリガー努力事象、ダブルトリガー事象、自動トリガー事象、後期トリガー事象、早期循環事象、後期循環事象及び/又は無効吸気努力事象とみなすことができる。
【0035】
図3は、無効吸気努力事象の一例のグラフである。そのグラフは、セクションAにおける通常の呼吸中の流れ信号、気道内圧(「Pao」)信号及び経横隔膜圧(「Pdi」)信号、並びにセクションBにおける無効呼気努力事象を伴う呼吸のプロットを有する。Pdiにおける正の振れは、患者による吸気努力を示す。図示されるように、セクションBの呼吸は、呼気中央部において流れ信号上に支配的な摂動を有する。この非同期性事象は、呼気中に換気に伴ってPdiが正に振れるが、その後、呼吸治療装置又は人工呼吸器からの吸気支援が行われないと特徴付けることもできる。
【0036】
図4は、ポストトリガー努力事象の一例のグラフである。そのグラフは、セクションAにおける通常の呼吸中の流れ信号、気道内圧Pao信号及び経横隔膜圧Pdi信号、並びにセクションBにおけるポストトリガー努力事象を伴う呼吸のプロットを有する。そのグラフは、呼吸治療装置又は人工呼吸器がトリガーした後に開始し、装置が吸気支援送達し、結果として流れが増加している間に生じる、換気に伴うPdiの正の振れを示す。この例のセクションBにおける吸気支援の開始は、機械によってトリガーされる。
【0037】
図5は、ダブルトリガー事象の一例のグラフである。そのグラフは、セクションA及びCにおける2回の通常の呼吸中の流れ信号、気道内圧Pao信号及び経横隔膜圧Pdi信号、並びにセクションBにおけるダブルトリガー事象を伴う呼吸をプロットする。換気に伴うPdiの単一の振れにわたって2回の機械的呼吸が送達される。第1のサイクルは患者によってトリガーされ、非常に短い呼気時間だけ第2のサイクルから分離され、その呼気時間は、平均吸気時間(5分間超)の約半分未満と規定することができる。
【0038】
図6は、自動トリガー事象の一例のグラフである。そのグラフは、セクションA及びCにおける2回の通常の呼吸中の流れ信号、気道内圧Pao信号及び経横隔膜圧Pdi信号、並びにセクションBにおける一連の自動トリガー事象をプロットする。その事象は、呼吸治療装置又は人工呼吸器によって吸気支援が送達されるが、それに付随してPdiの振れが生じないことを含むことができ、振れがあれば患者努力を示すことになったであろう。これは、患者によってトリガーされなかった呼吸をデバイスが送達したことを示すとみなすことができる。
【0039】
図7は、後期トリガー事象の一例のグラフである。そのグラフは、セクションBにおける通常の呼吸中の流れ信号、気道内圧Pao信号及び経横隔膜圧Pdi信号、並びにセクションAにおける後期トリガー事象を伴う呼吸をプロットする。そのグラフは、呼気中にPdiにおいて換気に伴う正の振れがあるが、その後、150msよりも長い時間が経過するまで、デバイスからの吸気圧支援が行なわれないことを示す。Pdiの増加は、患者努力の開始が、デバイスが圧力支援を送達してから150msよりも長い時間が経過したことを示す。
【0040】
図8は、早期循環事象の一例のグラフである。そのグラフは、セクションAにおける通常の呼吸中の流れ信号、気道内圧Pao信号及び経横隔膜圧Pdi信号、並びにセクションBにおける早期循環事象を伴う呼吸をプロットする。患者のPdiの換気に伴う振れの終了前に、デバイスによる吸気支援が停止又は終了しており(例えば、デバイスの呼気状態に進んでおり)、患者の努力がデバイスの機械的呼吸を過ぎて延長されることを示すことができる。
【0041】
図9は、後期循環事象の一例のグラフである。そのグラフは、後期循環事象を伴う呼吸中の流れ信号、気道内圧Pao信号及び経横隔膜圧Pdi信号をプロットする。その事象は、デバイスの吸気時間の延長、又は吸気状態が患者の吸気努力の終了を過ぎているとして特徴付けることができる。例えば、その事象は、時間Tbが時間Taの半分よりも長い(例えば、Tb>Ta/2)ときに存在すると考えることができる。ただし、
Tbは、患者努力の終了を過ぎたデバイス吸気時間の延長であり、
Taは、患者吸気努力の持続時間である。
【0042】
図9は無効吸気努力事象も示す。この事象は、2秒と3秒との間の時間スケールにおいて生じることが示される。この時間期間のグラフは、気道内圧Pao信号の関連する、又は対応する変化を生じることなく、経横隔膜圧Pdi信号が増減することを示す。
【0043】
特徴集合の例
先に言及されたように、いくつかの実施形態において、検出器100は、例えば、1つ又は複数の特徴集合の検出値を用いて1つ又は複数の特定のパターンを検出することによって、特徴集合の検出値又は変数に基づいて上記の種々のタイプの非同期性事象を検出するように構成することができる。これらの集合は、患者の呼吸についての情報、及び/又は呼吸治療装置についての情報を検出するセンサ信号から計算されるか、又は判定される1つ又は複数の特徴を含むことができる。例えば、本技術の実施形態は、図3〜図9のグラフにおいて示されるような測定信号に基づいて、それらの特徴を利用するか、それらの特徴のための値を計算するか、又はその特徴を判定するように実施することができる。それにもかかわらず、なお更なる実施形態では、それらの特徴は、侵襲的な経横隔膜圧センサではなく、圧力センサ及び/又は流れセンサの非侵襲的な測定信号に基づくことができる。
【0044】
検出値の集合の特徴例は、圧力及び/又は流れデータを用いて導出可能である、呼吸数に基づく特徴、体積に基づく特徴、呼吸機構に基づく特徴、呼気流形態に基づく特徴、電力に基づく特徴等を含むことができる。例えば、本明細書において更に詳細に検討されるように、そのような検出変数は、以下の検出変数:RR呼吸、RR比、IE比、VolI、VolE、breathLeak、Vol比、PEEPii、Ri、Ci、Taui、PEEPie、Re、Ce、Taue、InterpMinima、InterpMinima−2/3、PW線形近似電力、PW体積偏差、PW距離流最大最小、PW距離比のうちのいずれか1つ又は複数とすることができる。そのような特徴は、それらの信号から検出されるのに応じて、呼吸毎に計算することができる。これらの特徴は以下に要約され、以下の表Iに含まれる。付加的な特徴も後に更に詳細に検討される。
【0045】
【表1】

【0046】
呼吸数に基づく特徴は以下のものを含むことができる。
RRbreath=1/Tbreath :呼吸数によるこの特徴は呼吸毎に求めることができ、その値は周期の逆数として計算することができる。
RR比=RRbreath/RRmean :呼吸数に基づくこの特徴は、5分間のような、或る時間期間にわたって計算された平均呼吸数に対する呼吸数の比として求めることができる。
IE比=Ti/Tbreath :呼吸数に基づくこの特徴は、呼吸の周期に対する、その呼吸のための吸気時間の比として求めることができる。
【0047】
呼吸毎の体積に基づく特徴は以下のものを含むことができる。
VolI −この求められた特徴は、1回の呼吸において吸入される絶対体積とみなすことができる。それは、吸気中の流れの積分として求めることができる。
VolE −この求められた特徴は、1回の呼吸において吐出される絶対体積とみなすことができる。それは、呼気中の流れの積分として求めることができる。
breathLeak=VolI−VolE :この求められた特徴は、吸気と呼気との間で漏れる体積とみなすことができる。それは、吸入される絶対体積と吐出される絶対体積との間の差として求めることができる。
Vol比=VolI/VolE :この求められた特徴は、1回の呼吸の吸気量と呼気量との比とみなすことができる。それは、吸入される絶対体積を吐出される絶対体積で除算した値として計算することができる。
【0048】
呼吸毎の呼吸機構に基づく特徴を求めることもできる。例えば、機構パラメータは、圧力、流れ及び体積データを、多重線形回帰によって以下のような一次の単一区画の肺モデルに当てはめることによって、各呼吸の吸気相及び呼気相(それぞれ下付き文字i及びeによって表される)の両方に対して計算することができる。
圧力=流れ*R+体積/C+PEEPtot
ただし、PEEPtotは、呼気中に加えられる圧力と患者の固有PEEP(呼吸終末陽圧)との和であり、
Rは呼吸器系の抵抗であり、
Cは呼吸器系のコンプライアンスである。
Tau=R*C 患者の時定数(Tau)も呼吸機構に基づく特徴であり、抵抗×コンプライアンスとして求めることができる。
【0049】
呼気流形態に基づく特徴を求めることもできる。非同期性は、圧力信号及び流れ信号における不規則性又は摂動によって特徴付けることができる。呼気中にこれらを特定するために、近似された「正常な」呼気形状から、流れ曲線の著しい偏差を導出することができる。約0.1秒のような時定数を有するセグメント化された移動平均フィルタを、呼吸相毎に別個に流れ信号に適用することができる。呼気周期毎に、呼気の最初の部分(例えば、25%)において生じる最大呼気流の場所が得られた。付加的な呼気流形態に基づく特徴は、以下のものを含むことができる。
【0050】
interpMinima −最初の部分を過ぎた呼気の残りの部分に対して、例えば、約150ミリ秒の間隔のような、離散的な間隔において極小値を求めることができる。呼気の持続時間にわたってこれらの極小値からの補間を求めることができる。その結果を用いて、減算によって移動平均をトレンド除去することができ、結果として得られた信号のための電力(RMS)を求め、患者のモード値にわたって正規化することができる。
【0051】
interpMinima−2/3 −この特徴は、トレンド除去されて補間された上記の極小信号を用いて判定することができる。補間された極小信号から、呼気の最後の3分の2のための電力(RMS)を計算し、患者のためのモード値にわたって正規化することができる。
【0052】
PW線形近似電力 −この特徴は、最大呼気流の位置以降の呼気の残りの部分に対する区分的双線形近似とみなすことができる。第2の線形成分を用いて、減算によって移動平均のトレンドを除去することができる。その後、結果として得られた信号のための電力(RMS)を求め、患者のためのモード値にわたって正規化することができる。
【0053】
PW体積偏差 −この特徴は、区分的体積偏差とみなすことができる。その特徴は、整流され、トレンドを除去された移動平均の積分として計算することができる。トレンド除去は、区分的線形近似の減算によって求めることができる。それを患者毎のモード値にわたって正規化することができる。
【0054】
PW距離流最大最小 −この特徴は、区分的距離流最大最小とみなすことができる。その特徴は、トレンドを除去された移動平均(区分的線形近似の減算による)の最小値及び最大値の指標を用いて求めることができる。その後、その最小値及び最大値を用いて、移動平均呼気流信号内の対応する実流値の位置を特定した。その後、Y方向において、これら2つの実流値間の距離を計算することができる。
【0055】
PW距離比 −この特徴は、区分的距離比とみなすことができる。その特徴は、PW距離流最大最小の比として求めることができる。それは、最大流点(予め計算される)とピーク呼気流との間の距離の或る割合として計算することができる。
【0056】
特徴集合のための付加的な特徴が、後に更に別の実施形態において検討される。
【0057】
特徴集合選択
検出器100によって実現するための、呼吸数に基づく特徴、体積に基づく特徴、呼吸機構に基づく特徴、及び呼気流形態に基づく特徴のような特徴集合は、特定の非同期性事象に対する各特徴が示す性質に基づいて設計時に選択することができる。したがって、既知の呼吸非同期性データに関連する特徴の経験的解析を利用して、本明細書において記述される検出器において用いるのに適している場合がある、非同期性を示す特徴集合及びそれらの特徴のしきい値のパターンを導出することができる。この経験的解析は、複数の患者からのデータに基づくことができる。例えば、パルツェン窓推定器のような分類器モデルを実現して、適切な特徴集合を特定又は選択することができる。以下は、そのような分類器の実施態様の一例の説明である。
【0058】
分類器モデル:パルツェン窓推定
パルツェン窓推定器を処理装置によって実現して、既知の呼吸非同期性データとともに、上記の特徴のうちのいくつか、又は全ての上位集合のような特徴群を解析することによって、非同期性事象を示す特徴部分集合を評価することができる。例えば、センサ信号から上記の特徴が求められるか、又は抽出された後に、各呼吸は、関連する特徴集合xを有することができる。この特徴ベクトルは、所望の用途によるが、X個までの特徴を有するであろう。そのような分類器において、ωiが第iのクラスを示すものとすると、ベイズの規則による方法を実施して、以下のような事後確率を最大にする所与のテスト特徴ベクトルのためのクラスを見つけることができる。
【数1】
【0059】
カテゴリ毎の事後確率は、パルツェン窓推定によって計算することができる。このノンパラメトリック法の利点は、根底にある密度の形がわかっていることを前提とすることなく用いることができることである。xにおける密度p(x)を推定するために、最初に、特徴空間にわたって一連の領域R1...Rnが作成される。各領域Rnは、d次元の超立方体である。hnが超立方体の辺の長さであるとすると、その体積は以下の式によって与えられる。
【数2】
【0060】
したがって、超立方体knに分類されるサンプルの数は、以下の窓関数によって定義すすことができるようになる。
【数3】
【0061】
ただし、
【数4】
は単位超立方体であり、原点を中心にした単位超立方体の内部で値1を有し、その外部で値0を有する。(2)及び(3)を組み合わせると、n個のトレーニングサンプル及び窓関数を用いるパルツェン窓密度推定値を以下の式によって定義することができる。
【数5】
【0062】
特徴ベクトル間のユークリッド距離の中央値に等しい半径を有するガウス窓関数を用いることができる。
【0063】
推定器が複数のクラスを付された呼吸データに適用される可能性があることに起因して、分類器は、各クラスを別個に、かつ順次に扱うことができるように、二分器として動作することができる。
【0064】
特徴部分集合選択
その処理装置は、分類性能判定基準を最大にする特徴部分集合を特定することができる部分集合選択器としての役割を果たすために、SFFS(Sequential Forward Floating Search)のような逐次選択アルゴリズムの形で実現することができる。例えば、精度判定基準は、既知の分類に基づいて、各部分集合によって正確に分類される呼吸のパーセンテージとして計算することができる。最初に、そのようなアルゴリズムは、通常のSFS(sequential forward selection:逐次前進選択)を用いて、いくつか(例えば、3つ)のパスを形成することができ、3つの特徴が選択されるようにする。これらの評価パスはそれぞれ、既に選択されている特徴の性能しきい値に加えて、最も大きな改善に寄与する特定の特徴を性能に追加する。最適な特徴集合の一部でない特徴の「ネスティング」を避けるために、1つずつ特徴を除去することができ、一連の残りの特徴をシャッフルし直すことができる。その後、改善が得られたかどうか、分類器性能を調べることができる。性能が改善された後にのみ、特徴の新たな組み合わせが選択される。そのような特徴削除段階の後に、SFSアルゴリズムを実行して、新たな特徴を追加することができる。この特徴追加及び削除サイクルは、特定の特徴部分集合の性能が最大にされるまで繰り返される。
【0065】
特徴集合の例
例えば、そのような過程によって設計される検出器100の一実施形態を、無効呼気努力非同期性を検出するための特徴の部分集合を用いて実現することができる。そのような部分集合は、PW線形近似電力、PW距離流最大最小、PW体積偏差、Taui及びPW距離比を含むことができる。呼吸装置センサデータから、これらの特徴のための値を呼吸毎に計算し、対応する1組のしきい値と比較して、1つ又は複数の呼吸における無効呼気努力非同期性事象の存在を検出することができる。付加的な特徴集合例は、本明細書において更に詳細に検討される。
【0066】
実験
上記の方法に基づいて、肺疾患病棟の23人の患者からの5627回の呼吸が調査された。患者は、従来の人工呼吸及び非侵襲的な人工呼吸(NIV)の両方を受けていた。患者は、深刻な呼吸障害から回復した後にNIVを、又はウィーニングの進行した段階において従来の換気を受けていた。被検者毎に、10〜20分の呼吸データが得られた。以下のトレースが得られた。マスクと人工呼吸器のYピースとの間に配置されるか、又はYピースに配置される熱線型呼吸流量計及び差圧変換器を用いて、気道開口時の流れが測定された。呼吸流量計とフェースマスク又は気管内チューブとの間のサイドポートから気道内圧が測定された。バルーンカテーテルシステムを用いて、食道内圧及び胃内圧が測定された。このために、食道の下3分の1に食道バルーンが配置され、0.5mlの空気で満たされ、胃バルーンが1mlの空気で満たされた。閉鎖試験を用いて、バルーンが適切に配置されていることを確認した。経横隔膜圧(Pdi)が、胃内圧(Pga)と食道内圧(Pes)との間の差として計算された。
【0067】
呼吸セグメント化アルゴリズム
各呼吸時期(instance)を自動的に区分するために、処理装置を用いて、データにセグメント化アルゴリズムが適用された。図10に示されるように、プログラムされた状態機械は4つの状態を含み、流れ及び体積信号(図10の「流れ」及び「体積」条件として示される)を解析して、各吸気の開始時点及び終了時点を特定した。この特定は、流れ及び体積条件に基づいて、状態機械が図10に示される「確認済み吸気」状態1010及び「確認済み呼気」状態1020に入ることに対応する。状態図論理の条件において示される、選択された流れしきい値及び体積しきい値は、α=0.05L/s及びβ=150mLである。呼吸を区分する他の方法を実施することもできる。
【0068】
図10に示されるように、確認済み呼気状態1020において開始すると、プログラムされたプロセッサは、流れが0付近の正の値(α)よりも大きくなるのを待った後に、暫定吸気状態1030に進む。その後、0に近い雑音変動を超えて、吸気において信号が確立されたことを示すほど十分に累積された体積(β)を検出した場合にのみ、プロセッサは確認済み吸気状態1010に進む。同様の処理論理が、確認済み吸気状態1010から暫定呼気1040を通って、確認済み呼気状態に移行して戻る場合にも当てはまる。流れ信号のデータに対して、これらの時点を監視することによって、状態機械が確認済み吸気状態及び確認済み呼気状態に入る時点に対応する、各吸気の開始時点及び終了時点が特定される。
【0069】
視覚的な非同期性スコア化
カスタム設計されたグラフィカルユーザインターフェース(Matlab)を用いて、非同期性、及び呼吸区分の正しさの視覚的なスコア化が、人工呼吸を専門とする一人の医師によって実行された。代替的には、自動コンピュータシステムを利用して、非同期性のスコア化を計算することもできる。
【0070】
手動による事象スコア化のためのグラフィカルユーザインターフェース(GUI)の一例が図13において示される。そのインターフェースによれば、一連の呼吸動作の中で個別にありとあらゆる呼吸の容易な視覚的評価を行なうことによって、手動でスコア化できるようになる。そのインターフェースは、その表示に従って信号を分類できるようにし、かつ信号を検索できるようにする。信号のデータを有するデータファイルは、そのインターフェースの右上角にあるボタンを用いて管理することができる。データファイルをロードする際に、インターフェースのプログラムは、データヘッダを変数名としてパースし、それに応じてカラムデータを格納する。セーブされたデータを有するファイルは、以下のように予約される1組の作業領域変数を含むことができる。
CompFlow:
オフセット及び漏れを補償された患者流れデータ
Pao:
気道における圧力
Pdi:
経横隔膜圧
Ppl:
胸腔内圧
Pab:
腹圧
Inspirations:
呼吸毎の吸気の開始を区分する一連の指標
Expirations:
呼吸毎の呼気の開始(したがって、吸気の終了)を区分する一連の指標
AsynchronyClass:
非同期性が存在する場合には、その非同期性のタイプを指示する、各呼吸に指定される一連のラベル
Fs:
デフォルトで100Hzである、データのサンプリングレート
Filename:
固有ファイル識別子
【0071】
そのインターフェースの例では、上から下に向かって、5つのプロットを用いて、患者流(Flow)、気道内圧力(Pressure-airway)、経横隔膜圧(Pressure-transdiaphragmatic)、胸腔内圧(Pressure-pleural)及び腹圧(Pressure-abdominal)を含む、時系列データを表示する。必要な場合には、流れを反転(Invert)できるようにするために、制御ボタンを含めることができる。
【0072】
そのデータの時間スケール(Time Scale)は、パネルの左下角にあるボタン群によって調整することができる。例えば、そのスケールを短くすると、表示される秒範囲を半分にすることができ、逆にスケールを長くすると、その範囲を二倍にすることができる。データの検索は、そのインターフェースをプログラムされたコンピュータのキーボードの上下矢印キーによって設定された時間スケールに従って画面を前後にめくることによって達成される。データトレース上に、本明細書において更に詳細に検討されるような自動呼吸検出アルゴリズムによって区分されるような、呼吸毎の吸気及び呼気両方の開始を指示するマーカーを表示することができる。1つの呼吸を選択することができ、その際、各トレースの対応する部分が常にハイライトされる。呼吸は、左及び右矢印キーを用いて順次に行き来することによって、又は数値情報(呼吸数又は呼吸が生じる時点)をパネルの右下角にある最初の2つのユーザ入力欄に入力することによって選択することができる。1つの呼吸の場合に表示される呼気開始は、最後のユーザ入力欄内にミリ秒単位のオフセットを入力することによって調整することができる。
【0073】
インターフェースの右下パネルは、単一の呼吸の更に詳細なグラフを示しており、患者流、気道内圧及び経横隔膜圧が共通のグラフ軸上に重ねられる。圧力スケールは左軸上に与えられ、流れは右軸上に与えられる。これにより、採点者が信号のタイミング細部を、より高い解像度で視認できるようになる。
【0074】
最後に、右上パネルは、チェック欄によって呼吸のカテゴリ化に関するユーザ入力を受信し、格納するための役割を果たす。一度に2つ以上のカテゴリがチェックされてもよい。選択するために利用可能なカテゴリ及びそれらの定義判定基準は、以下のものを含むことができる。
正常トリガー(Normal Trigger):
人工呼吸器のトリガーが患者の努力の開始に対して適切に調整される。
正常吸気(Normal Insp):
吸気中に人工呼吸器と患者との間の相互作用の調和が取れている。
正常サイクル(Normal Cycle):
人工呼吸器の循環が患者の努力の終了に対して適切に調整される。
正常呼気(Normal Exp):
呼気中に人工呼吸器と患者との間の相互作用の調和が取れている。
無効吸気努力(Insp. Ineffective Effort):
人工呼吸器がトリガーされた後に換気に伴うPdiの正の振れが開始し、吸気支援を送達しつつあり、結果として流れトレース内の振れが増加する。
無効呼気努力(Exp. Ineffective Effort):
呼気中に換気に伴うPdiの正の振れが生じたが、その後に、人工呼吸器からの吸気支援がなかった。
無効複数努力(Multiple Ineffective Efforts):
呼気中に換気に伴うPdiの2つ以上の正の振れが生じるが、その後に、人工呼吸器からの吸気支援はない。
後期循環(Late Cycling):
呼気中にPdiにおいて換気に伴う正の振れが生じるが、その後、150msよりも長い時間が経過するまで、人工呼吸器からの吸気圧支援がない。そのPdi増加は、患者努力の開始が、デバイスが圧力支援を送達してから150msよりも長い時間が経過したことを示す。
後期トリガー(Late Trigger):
患者の吸気努力の終了を過ぎて人工呼吸器の吸気時間が延長される。例えば、Tiexcessが患者努力の終了を過ぎて人工呼吸器の吸気時間の延長であり、Tipatが、患者吸気努力の持続時間である場合、時間Tiexcessが時間Tipatの半分よりも長い(Tiexcess>Tipat/2)ときに、後期トリガーが存在するとみなすことができる。
早期循環(Early Cycling):
患者の換気に伴うPdiの振れの終了前に人工呼吸器による吸気支援が終了し、それは患者の努力がデバイスの人工呼吸を過ぎて延長されることを示す。
自動トリガー(Auto-trigger):
呼吸治療装置又は人工呼吸器によって吸気支援が送達されるが、それに付随してPdiの振れは生じない。振れがあれば患者努力を示すことになったであろう。これは、患者によってトリガーされなかった呼吸をデバイスが送達したことを指示するとみなすことができる。
ダブルトリガー(Double Trigger):
換気に伴うPdiの一度の振れにわたって2度の人工呼吸が送達される。第1のサイクルは、患者によってトリガーされ、非常に短い呼気時間だけ第2のサイクルから分離され、その時間は、先行する正常な呼吸の平均吸気時間の約半分未満であると定義することができる。
咳(Cough):
患者が咳をしており、これは腹部努力による呼気内の大きな負のスパイクによって示される。
気道閉塞(Airway Obstruction):
上気道が概ね閉塞される。それは、患者努力に付随して流れが平坦であるか、若しくは流れが生じないことによって示されるか、又は主に呼気において生じる嚥下動作中に短時間だけ示される。
時限呼吸(Timed Breath):
人工呼吸器によってトリガーされる強制的な呼吸。
破棄(Discard):
データが破損しており、使用するのに適していない。
不明(Dont know):
事象/活動が曖昧であり、精査する必要がある。
【0075】
視覚的なスコア化を実行するように指定された医師は患者の臨床データに目を通さず、その治療にも従事していなかった。
【0076】
吸気の開始は、患者努力の開始に対応するPdiの振れと協調するように、患者毎に200ms(±50ms)だけ全体的に調整された。その後、無効呼気努力事象、ポストトリガー努力事象、ダブルトリガー事象、自動トリガー事象、後期トリガー事象、早期循環事象、後期循環事象及び無効吸気努力事象を含む、先に特定された非同期性事象のカテゴリ及び定義によって、各呼吸が正常又は非同期性のいずれかにラベル付けされる。
【0077】
全部で5627回の呼吸を解析し、以下の表IIにおいて要約されるようにラベル付けを行った。
【0078】
【表2】
【0079】
この実験の目的は、非侵襲的なセンサを用いて非同期性の検出を自動化することであったので、検出特徴の上位集合が、経横隔膜圧信号を用いてではなく、流れ信号及び圧力信号のみを用いて導出された。したがって、プログラムされた処理装置は、流れ信号及び圧力信号からのデータに基づいて呼吸毎に特徴を導出した。導出された特徴は、上記の表Iにおいて先に要約された特徴であった。
【0080】
パルツェン窓推定器及び特徴部分集合選択器
その後、その特徴データは、上記のようなプログラムされたパルツェン窓推定器及び特徴部分集合選択器を有する処理装置に適用された。試験時に、データを解析して、無効努力非同期性事象分類器のための特徴集合を作成した。残りの非同期性事象のための付加的な特徴集合も同じように作成することができる。
【0081】
クロス−フォールド(cross-fold)検証器
作成された非同期性分類器の結果を評価するために、クロス−フォールド検証が適用された。このために、一人を除く全ての患者からの特徴の上位集合が、検出器/分類器を作成するためのトレーニングデータを形成した。その後、特徴の部分集合を用いる分類器を、除外された患者の対応する特徴データに関して試験した。この過程を、全ての患者に対して23回繰り返し、それにより、一人の患者をトレーニングデータから除外し、各繰返しにおいて自動非同期性検出システムを試験するために確保した。言い換えると、この場合、より大きな患者のグループからのデータを用いて自動的に作成された分類器を用いて、除外された患者のデータからの非同期性事象を自動的に検出した。その後、検出器/分類器の性能を全体的に推定するために、全23パスにわたって、精度、感度、特異度、陽性予測度及び陰性予測度の値、及びコーエンのカッパ(Cohen’s kappa)係数を平均した。
【0082】
試験結果
以下の表IIIは、無効努力非同期性事象を検出するために作成された特徴集合を用いて、自動非同期性検出器によって行なわれた検出のための陽性予測度、陰性予測度、感度及び特異度結果を含む。検出器の性能を、5627回の呼吸の場合に手動で注釈されたデータと比較した。また、各パラメータが計算可能であった記録の数Nも示す。その検出器例の場合に選択した特徴集合は、順番に、1.PW線形近似電力;2.PW距離流最大最小;3.PW体積偏差;4.Taui;5.PW距離比であった。
【0083】
【表3】
【0084】
実験評価
23人の被検者のデータベースを用いて、患者−人工呼吸器相互作用における非同期性の主な形態を検出するための非侵襲的方法を設計し、専門家に基づく分類システムと比較した。
【0085】
無効呼気努力を分類する場合、検出器/分類器の全体精度及び特異度は高いのに対して、感度は普通である。感度が低い原因として考えられるには、時限圧力支援呼吸がデータ間で共通であったという事実に関連する。これらの呼吸を含むそのようなモードでは、人工呼吸器は患者によって加えられる正常な努力を無視することが意図されており、メトロノームのようにタイミングを指示することが好ましい。結果として、正常なサイズの努力は、圧力支援を伴わない正常な正の振れを引き起こす流れ信号に影響を及ぼす場合がある。これらの努力は、依然として無効と分類されるが、病理的な異種ではなく、圧支援換気に関して医師が患者に対して抱く主な懸念を占める固有PEEP及び過膨張によって大きく影響される。病理学的な無効努力は、時限モードによって引き起こされる無効努力と比べてより小さな負の値の流れの振れを伴って生じる。したがって、合成された特徴ベクトルは、他の呼吸クラスの、より大きな割合を横切る。このクラスを2つの部分集合としてラベル付けし直すことによって、分類器の感度を改善することができる。
【0086】
分類器の感度に影響を及ぼす別の要因は、呼気努力と早期循環との間の類似の形態である:いずれも呼気中の流れ信号上の(それに応じて圧力上の)単一の摂動によって分類されるが、それらが呼気の開始から生じる時間間隔によって区別されるだけである。この間隔は被検者によるので、専門家が目視で調べる場合であっても曖昧な場合がある。
【0087】
分類器特異度を制限する要因は、咳、嚥下及び腹部努力のような人為現象、並びにPdi信号に雑音がある場合、大きなドリフトを示す場合、又は食道痙攣が生じる場合に人が間違えること、及び曖昧であることによってもたらされる正しくない呼吸ラべル付けを含む。
【0088】
形態的特徴と同様に、SFFSアルゴリズムによって顕著な特徴として吸気時定数Tauiが選択されたことに留意するのが興味深い。この生理的パラメータを、主に過膨張を伴う閉塞性患者において生じる無効努力の機構に関連付けることは興味深い。その際、高い吸気時定数を有する患者が、より多くの数の無効努力を示すと予想することができる。
【0089】
要するに、パターン分類手法を用いて非同期性の検出を自動化することは実現可能であり、患者人工呼吸器相互作用の品質を評価する際に臨床的に有用とすることができる。
【0090】
無効呼気努力に関連する特徴集合の例
検出器のいくつかの実施形態において、1つ又は複数の特定の非同期性事象の場合に、特徴集合を具体的に考案することができる。例えば、多くの場合に、非同期性は、圧力信号及び流れ信号上の不規則性又は摂動によって特徴付けられる。具体的には、無効呼気努力事象(eIEs)に関して、これらの不規則性は呼気中に生じる。これらの不規則性の信号対雑音比は、一般的に、圧力信号上よりも流れ信号上で高いので、特徴集合を導出するための主要信号として流れを用いることができる。このために、約0.1秒の時定数を有するセグメント化移動平均フィルタを呼吸相毎に別個に流れ信号に適用することができる。呼気中の不規則性を特定するために、呼吸の呼気形状の、より「正常な」予測される軌跡からの流れ曲線の著しい偏差を導出することができる。呼気によって予測されるこの軌跡をΘと呼ぶ。予測される軌跡を用いて、以下のような減算によって、フィルタリングされた流れ信号
【数6】
をトレンド除去することができる。
【数7】
それにより、結果として生成される信号Φは、非同期性を表すことができる任意の不規則な偏差を際立たせるようになった。特徴をΦに関する更なる演算から導出した。
【0091】
呼気信号によって予測される軌跡Θは、以下のような2つの方法例のうちの一方によって導出することができる。最初に、いずれの方法の場合にも、呼気の最初の25%において生じる最大呼気流の場所を得た。この場所まで、Θはフィルタリングされた流れに等価であった。その後、Θの残り部分が、以下の方法のうちの1つによって計算することができる。
【0092】
(1)極小値補間法
フィルタリングされた流れ信号から500msの間隔において極小値を得ることができる。最大呼気流と呼気の終了との間でこれらの極小値から補間することによって、Θintを導出することができる。図14は、無効呼気努力を含む呼気サンプルに適用される方法を示す。この図において、フィルタリングされた呼気流データ
【数8】
は無効呼気努力を含む。予測される正常な軌跡Θintを導出することは、ピーク呼気流後に生じるデータの500ms間隔において極小値を見つけること、及び極小値間を補間して、元の軌跡よりも滑らかな軌跡を導出することを含む。
【数9】
からΘintを減算することによって得られる信号Φintは、無効努力をハイライト又は指示する。
【0093】
(2)区分的双線形当てはめ法
最大呼気流の位置以降の呼気流データの残り部分に対して、区分的双線形近似を実行することができる。この手順は、a−15及びb−15として示される2つの線形部分に対するデータの最小二乗当てはめを含むことができ、それらの部分は場所kにおいてL字曲がり(elbow)又は折れ点によって連続するように連結することができる。最も良好であり、かつ最も適切な当てはめを提供できるようにするために折れ点が必要とされる場所を判定するために、最初のサンプルから、そのデータの長さの3分の1に等しいサンプルまで順次に、kの値を試験することができる。試験条件は、データと当てはめられた値との間の差の二乗平均平方根とすることができ、最小条件値を返すkを選択することができる。kの場所は呼気の最初の3分の1に限定することができる。なぜなら、典型的な呼気プロファイルは、この名目的な期間内で最も際立ってその曲率を変更するためである。さらに、無効努力は、呼気のその後の3分の2の間に最も一般的に生じる傾向があった。Φpwの計算において無効努力を際立たせるために、無効努力の特徴に関連する領域の周囲において高い分散を有する線形当てはめが望ましかった。kの配置に関して制限が加えられなかった場合には、無効努力を含む呼気に対して、最も良いkが無効努力の形態自体の中に位置することになり、それゆえ、それを増強するのに、その手順は不十分になるであろう。信号Θpwは、第2の線形成分b−15とのその最初の交差部分までのフィルタリングされた流れと、この交差部分を越えるb−15の残りの部分とを連結することによって導出することができる。図15は、図14に示されるのと同じサンプルに適用される方法を示す。したがって、図15では、フィルタリングされた呼気流データ
【数10】
は、無効呼気努力を含む。予測される正常な軌跡Θpwの導出は、区分的双線形関数(折れ点kにおいて接合される部分a−15及びb−15)を最大呼気ピークの位置以降のデータに当てはめること、及びその交差部分(上向き矢印1550によって指示される)において第2の線形成分をフィルタリングされた流れに連結することを伴うことができる。
【数11】
からΘpwを減算することによって得ることができる信号Φpwは、無効努力をハイライト又は指示する。
【0094】
これらのトレースを用いて特徴集合を導出するために、信号のデータを用いて、Θpw上に基準点を配置することができる。図16に例が示されており、図16はトレンドを除去された流れ、Θintを示しており、d−16、e−16、f−16及びg−16として図16上に示される基準点を付されている。それらの点は以下のものを含むことができる。
d−16:[dx,dy]、最大値の直前に生じる正の勾配を有するゼロ交差;
e−16:[ex,ey]、最大値;
f−16:[fx,fy]、最大値の直後に生じ、最小値の直前においても生じる負の勾配を有するゼロ交差;及び
g−16:[gx,gy]、最小値。
【0095】
これらの基準点は、フィルタリングされた流れ
【数12】
のデータにマッピングすることができ、その完全な基準点集合に寄与する。これが図17に示されており、図17は、フィルタリングされた流れ
【数13】
を示しており、c−17、d’−17、e’−17、f’−17及びg’−17としてラベル付けされる基準点を付されている。これらの点は以下のものとみなすことができる。
c−17:[cx,cy]、フィルタリングされた流れ
【数14】
上のピーク呼気流
d’−17:[dx,d’y]、無効努力の開始
e’−17:[ex,e’y]、無効努力のピーク値
g’−17:[gx,g’y]、無効努力の完了
【0096】
その後、以下の特徴のうちの1つ又は複数をΦpw及びΦintから導出することができ、起こり得る場合が図16及び図17に示される。
電力Φpw:
この特徴は、以下の式によって与えられるΦintの電力(RMS)とみなすことができる。
【数15】
ただし、iはサンプル番号であり、nは信号内のサンプル数である。
電力(2/3)Φint:
この特徴は、Φintの最後の3分の2の電力(RMS)とみなすことができる。
電力Φpw:
この特徴はΦpwの電力(RMS)とみなすことができる。
積分Φpw:
この特徴は、等価な整流後のΦpwの積分とみなすことができる。
勾配−a:
この特徴は、第1の線形に当てはめられた部分、a−15の勾配とみなすことができる。
勾配−b:
この特徴は、第2の線形に当てはめられた部分、b−15の勾配とみなすことができる。
振幅p−tΦpw:
この特徴は、Φpwの最大値と最小値との間の垂直距離ey−gyとみなすことができる。
持続時間p−tΦpw:
この特徴は、Φpwの最大値と最小値との間の水平距離gx−exとみなすことができる。
volIE:
この特徴は、無効努力中に動かされる空気の体積とみなすことができる。これは、曲線d−16→e−16→f−16下の正の面積と、d−16→f−16→g−16→d−16によって囲まれる面積の絶対値とを加算することによって、又は線d’−17→g’−17に対して弧d’−17→e’−17→g’−17を積分することによって計算することができる。
zxUpCount:
この特徴は、正の傾きを有する、Φpwのゼロ交差の数とみなすことができる。
maxFlowIE:
この特徴は、無効努力において達する最大流れの値e’yとみなすことができる。
heightIE:
この特徴は、指標e’y及びg’yに対応する、
【数16】
の値間の垂直距離とみなすことができる。
durIE:
この特徴は、無効努力の持続時間gx−dxとみなすことができる。
rangeP−P:
この特徴は、呼気における最大呼気ピークと無効努力における極大値との間の垂直距離e’y−cyとみなすことができる。
durP−P:
この特徴は、呼気における最大呼気ピークと無効努力における極大値との間の水平距離ex−cxとみなすことができる。
ampRatio:
この特徴は、heightIEとrangeP−Pとの比とみなすことができる。
volRatio:
この特徴は、無効努力中に動かされる空気の体積volIEと、全呼気体積volEとの比とみなすことができる。
durRatio:
この特徴は、無効努力持続時間durIEと呼気の長さTeとの比とみなすことができる。
locationIE:
この特徴は、exと呼気の長さTeとの比として計算される呼気の無効努力の場所とみなすことができる。
【0097】
上記の呼気流形態に基づく特徴の特徴集合又は部分集合は、元の形及び正規化された形の両方において用いることができる。値を患者毎のモード値で割ることができるように正規化を実行することができる。先に検討されたような試験では、患者のための呼吸の大部分は「正常」である(非同期性を伴わない)ので、所与の特徴のモード値、又は最も頻繁に発生する値は正常なパターンを有する呼吸を表すと仮定することができる。正規化過程は、被検者間の変動を低減することを意図している。患者毎の特徴集合が導出されると、特徴毎の値の範囲及び対応するヒストグラムを計算することができる。特徴値は、その範囲の約5%に等しいビン幅に基づいてビン番号を割り当てることができる。その後、最も密度の高いビン番号にビン幅を乗算して、最小特徴値に加算した値として、特徴モード値を計算することができる。したがって、先に検討された他の特徴と同様に、その後、いくつかの実施形態では、複数の患者から求められた各特徴に対する特徴モード値を、検出器によって計算される特定の特徴と比べるときに非同期性事象を検出するためのしきい値として実現することができる。しかしながら、いくつかの実施形態では、各特徴に対する特徴モード値は、一人の特定の患者の過去のデータに対して具体的に求められ、今後の検出のためにその特定の患者とともに利用することができる。
【0098】
上記の検討から明らかになるように、本明細書において記述される種々のタイプの非同期性事象のような、呼吸事象の検出は、信号形態(例えば、流れ及び/又は圧力信号形態)から導出される1つ又は複数の特徴に基づくことができる。事象のための特徴のこの判定は、基準点、それに関連付けられる距離、その間の比又は他の関係を特定することを含むこともできる。基準点の自動特定は、当初に捕捉された生理的信号又は任意の中間的な信号のゼロ交差、極大値及び極小値を見つけること等の、種々の演算を含むことができる。中間的な信号は、MLRによって、又は一次関数、二次関数、指数関数、正弦関数、台形関数又は三角関数、或いは上記の関数の任意の区分的組み合わせのような他の関数によって、データを数学的に当てはめることによって、(流れ又は圧力等の)元の信号から導出することができる。区分的関数の構成は、当てはめの最小誤差を有する折れ点を位置特定しようと試みる最適化ルーチンの実施を含むことができる。中間的な信号は、更に、1つ又は複数の他の中間的な信号に関する演算(例えば、減算、重ね合わせ、デサンプリング、補間)から導出することができる。そのような過程において、基準点は、以下の例:(a)プラトー圧を超える前の圧力信号上の変曲点;(b)吸気ピーク後、かつ吸気の終了前の流れ信号上の傾きの最大変化を示す変曲点;(c)呼気終了時で、かつトリガー直前における圧力上の負の傾きの最大変化を示す変曲点;(d)トリガー直前の最小圧;(e)吸気ピークまでの吸気中の流れ信号上の正の傾きの最大変化を示す変曲点;及び/又は(f)データに当てはめられる区分的関数間の折れ点のうちの1つ又は複数とすることができる。
【0099】
ダブルトリガーに関連する特徴集合の例
ダブルトリガーを特徴付けるのは、圧力信号上に「うさぎの耳(rabbit-ears)」パターンを形成するための迅速な再トリガーである。このパターンは、適切な検出器によって用いるための特徴集合を考案するために考慮に入れることができる。この関連で、流れ信号は一般的に「うさぎの耳」パターンに従うことになり、吸気の遅れを示すギザギザのプロファイルを有し、そのプロファイルは呼吸全体にわたって正のままであるか、又は短時間だけ呼気に入る場合があり(誤った呼気)、その後、再トリガーに付随する吸気に戻る(図5を参照)。呼吸フレーマ(breath framer)は、このパターンを単一の吸気に関連すると認識することが望ましい。しかしながら、その流れが加圧間で負になり、その対応する体積が約150mLよりも大きい場合には、2つの呼吸がセグメント化される可能性がある。
【0100】
これらのパターンに基づいて、以下の形態的特徴を考案することができ、そのうちのいくつかが図18に示される。その図は、ダブルトリガーを伴う呼吸の流れ信号及び圧力信号を示す。有意なピーク及びトラフが画定されており、以下に記述される「peaksCount」、「falseExp」及び「timeElapsed」の特徴が示される。
【0101】
peaksCount:
この特徴は、約5cmH2Oよりも大きな有意な最小値によって分離される有意な最大値の数とみなすことができる。シミュレートされたリアルタイムのピーク−トラフ発見アルゴリズムが以下に説明される。f(x)が信号を表し、xがデータであるとすると、各xに関して、以下の動作が行われる。
1.f(x)>Tmaxである場合には、Tmax=f(x)とする。Tmaxは現在の一時的な最大値であり、保持変数としての役割を果たす。
2.f(x)<Tminである場合には、Tmin=f(x)とする。Tminは現在の一時的な最小値であり、保持変数としての役割を果たす。
(ステップ(1)及び(2)は、雑音の周囲で振動する場合がある。TminとTmaxとの間の有意な差が明らかになるまで、Lmax及びLmin、すなわち、極大値及び極小値は確認されない。)
3.Tmax−Tmin>5cmH2Oである場合には、Lmax=Tmax及びLmin=Tminを設定する。
4.ピークから降下し始めており、かつf(x)がLmaxとLminとの間の範囲の75%未満である場合には、降下フラグを設定し、上昇フラグを無効にし、一時的変数をリセットして、新たな1組のLmax及びLmin値の記憶を確認する。
5.トラフから上昇し始めており、かつf(x)が最新のLmaxとLminとの間の中間点よりも大きい場合には、上昇フラグを設定し、降下フラグを無効にして、Lmin=Tmin及びTmax=f(x)を設定する。
6.次のデータで繰り返す。
【0102】
timeElapsed:
この特徴は、有意な最大値間で経過した時間とみなすことができる。
【0103】
falseExpVol:
この特徴は、吸気中に生じる全呼気体積とみなすことができる。これは、ほとんどの場合に0mLよりも大きくなるが、誤った呼気を含む、ダブルトリガーの場合に150mL未満になると考えられる。
【0104】
expRatio:
この特徴は、現在の呼気時間と、先行する2分間にわたって計算される平均呼気時間との比とみなすことができる。誤った呼気体積が150mLよりも大きい場合があり、呼吸フレーマがその呼吸を誤って分割することも稀に生じる場合がある。この場合、採点者は、最初の呼吸をダブルトリガーと分類するように指示された。この場合、誤った呼気体積は、吐出される平均体積に比べて小さくなることが予想され、正常な呼吸とダブルトリガー呼吸とを分離する超平面に寄与する。
【0105】
したがって、これらのダブルトリガーに関連する特徴のうちの1つ又は複数は、特定の患者の場合に自動検出プロセッサによって計算することもできるし、判定することもでき、適切な1つ又は複数のしきい値に対して評価されて、ダブルトリガー事象が生じたか否かを判断することができる。
【0106】
呼吸機構に基づく特徴の判定
上記のように、特徴集合又は部分集合は、呼吸機構に基づく特徴を含むことができる。いくつかの実施形態では、これらの特徴は、検出器100のプロセッサによって自動的に判定することができる。この関連で、上記のような特徴集合の場合の抵抗R及びコンプライアンスC値の自動判定を、多重線形回帰法によって計算することができる。
【0107】
検出器によって処理するためのそのようなアルゴリズムのための基礎は、患者−人工呼吸器システムのモデルに対して数値データの多重線形回帰(MLR)を適用することに頼ることができる。多重線形回帰は単線形回帰を延長し、単一の応答変数と、1組の2つ以上の説明変数との間の関係を記述するために用いられる。その関係は線形であり、その基本形において、以下のように表記することができる。
【数17】
ただし、ランダム誤差εi、i=1、2、...、nは、平均が0で、一定の分散σ2を有する正規分布の確率変数である。
【0108】
患者−人工呼吸器システムは、全駆動圧がシステムの弾性と抵抗性との和であるような単一の区画としてモデル化することができる。これは、一次微分方程式によって記述することができる。
【数18】
ただし、Ptotは駆動圧であり、
【数19】
は気道内の流れであり、Vは変位する体積であり、Rは気道抵抗であり、Cは呼吸器系のコンプライアンスであり、P0は呼気終末における圧力であり、それは患者の適用される外部PEEPと内部PEEPとの和である。駆動圧を単一の応答変数と定義し、流れ及び体積を説明変数と定義することによって、プロセッサは、測定されたデータにMLRを適用して、パラメータR及びCを求めることができる。
【0109】
システム内の雑音は主に、乱流及び人工呼吸器タービンによってランダムに生成される。人工呼吸器タービンは確定的で周期定常的な成分も生成し、それらの成分はモデルの結果に影響を及ぼす場合がある。しかしながら、対象となる周波数範囲(例えば、<10Hz)内で、それらの成分は相対的に微々たるものであるとみなされる。したがって、モデル内の誤差εは、システム雑音の大部分の場合に良好な近似である。
【0110】
しかしながら、患者の筋努力は、モデルの精度にとって有意な係わり合いがある場合がある非ランダム雑音源の一例である。人工呼吸器を用いて自発的に呼吸する患者の場合、任意の時点における駆動圧は、人工呼吸器(PV)及び患者の呼吸筋(Pmus)の両方によって生成される。
【数20】
【0111】
Pmusは、食道バルーンカテーテルを用いなければ、直接測定することはできないので、患者の筋肉が活動している間に、機械的なパラメータを非侵襲的に正確に求めることは難しい。これは主に横隔膜及び副筋が収縮する吸気中の問題である。筋活動を考慮することなく、流れ及び体積データを吸気中に人工呼吸器圧力データに当てはめることは、抵抗を過小評価し、コンプライアンスを過大評価することになる。
【数21】
【0112】
MLR過程においてプロセッサによって実施することができるこの手法によれば、患者努力からの影響を除外することを可能にすることができ、そうでなければR及びCの精度の妨げになっている。
【0113】
非ランダムシステム雑音の別の例は、心拍帯域幅(1〜2Hz)において現れる心原性振動である。通常、心原性振動は、人工呼吸を施される患者の圧力及び流れに対して低い振幅の信号を生成するので、モデルに及ぼす影響は限られる。
【0114】
これらの過程の場合に、吸気と呼気との間の区別は、本明細書において更に詳細に説明される状態機械に基づくことができ、その状態機械は4つの状態:暫定吸気(PI)、確認済み吸気(CI)、暫定呼気(PE)、確認済み呼気(CE)を含む。したがって、呼気データは、確認済み呼気に先行する暫定呼気の開始から、確認済み吸気に先行する次の暫定吸気の開始まで(その暫定吸気は含まない)生じるデータとみなすことができる。
【0115】
各呼吸において回帰のために用いられるデータは、呼気の開始から、一回換気量の約85%〜95%(より好ましくは90%)が吐出される時点までを含むことができる。したがって、いくつかの実施形態では、呼吸サイクル(例えば、呼気部分に起因すると考えられるか、又は呼気部分に対応する圧力、流れ及び尺度)の一部(例えば、呼気部分)のみを、呼気の最初の時点から、吐出される一回換気量の所望の限度(例えば、85パーセント〜90パーセントの範囲)に達した時点まで評価することができる。この理由の1つは、データ内の動的な挙動を最適に捕捉することである場合がある。このモデルにデータを当てはめる意図は、圧力源の影響を受ける受動システムの動態を記述することである。したがって、計算は、患者呼吸筋活動に関連付けることができるデータを除外することができる。圧力の最低限の変化を伴う呼気終末において遅い流れが生じる場合、信号対雑音比が増加することによって、パラメータ推定が不正確になる可能性があるので、データのこの部分を計算から省くことができる。
【0116】
良好な当てはめにとって望ましいことは、流れ波形が指数関数的減衰に従うように、呼気努力又は他の誤った人為現象を伴わない呼気を達成することである。したがって、当てはめアルゴリズムとの関与から人為的な呼吸を除外することが望ましい場合がある。したがって、いくつかの実施形態において、抵抗及びコンプライアンスの判定の精度評価を実施することができる。これを果たすための1つの方法は、最後の数(例えば、約15)の呼吸からの当てはめられた機構パラメータの中央値が、より規則的な指数関数的減衰を有する呼気を表すと解釈できるように、約15の幅を有するフィルタのようなメジアンフィルタを実現することとすることができる。また、統計的当てはめからの決定係数R2値を、当てはめ不良の呼吸を除去するための判定基準として用いることができる。例えば、約0.8のしきい値を用いることができる。したがって、そのような例では、抵抗及びコンプライアンスの特定の判定(例えば、係数がしきい値未満であるという判定)を無視できるように、装置のプロセッサが、コンプライアンス及び抵抗値のMLR判定毎に決定係数R2値を求め、その値を精度しきい値に対して比較すること等によって、精度を判定することができる。
【0117】
抵抗及びコンプライアンス値の上記の判定は、本明細書において検討される非同期性検出方法の一部として実施することができるが、それらの値は他の目的を果たすために求められ、記録することもできる。したがって、本技術の処理デバイス又は呼吸治療装置は、例えば、呼吸毎にこれらの値を計算し、時間の経過とともにこのデータを記録することができる。それらの値は、複数の呼吸にわたって、又は所望の時間期間(例えば、1時間又は1つの治療セッション)にわたって、又は呼吸治療装置による複数の治療セッションにわたって平均することもできる。それらの値は、抵抗及びコンプライアンス値の傾向を評価できるように、出力することができる(例えば、別の処理装置に対して、ディスプレイに対して、かつ/又はメモリ記憶装置に対して)。本明細書において検討される制御実施態様に加えて、それらの値は、呼吸治療装置の制御パラメータに対して自動調整を行なうための付加的な基礎としての役割を果たすこともできる。例えば、それらの値は、患者を治療するための呼吸治療デバイスの圧力設定(例えば、圧力支援(PS)及び/又はPEEP)の自動又は手動滴定のために用いることができる。この関連で、それらの値は、呼吸治療装置の呼気終末陽圧(PEEP)及び/又は圧力支援の制御パラメータを決定し、変更し、かつ/又は設定する自動アルゴリズムのための基礎としての役割を果たすことができる。
【0118】
そのような実施形態の一例において、PEEP制御パラメータの自動滴定は、コンプライアンス値のような、呼吸機構の上記の推定とともに実施することができる。コンプライアンスは、臨床業務において診断援助として一般的に用いられる圧力−体積(PV)曲線の勾配を表す。PV曲線はS字形状であり、下側及び上側変曲点を越える曲線の下限及び上限において低いコンプライアンスが生じる。最適な人工呼吸方式、詳細にはPEEP及びPSの滴定は、PV曲線の中央の線形部分を利用するであろう。
【0119】
PEEPの自動滴定の実施形態の一例では、以下のようなPEEP滴定方法を用いて、滴定装置(例えば、自動滴定呼吸治療装置)のプロセッサが実現することができる。
1.圧力支援PSを更に用いることなく、肺胞の最大の漸増を確保するために、より高い値(例えば、10cmH2O〜15cmH2O)において、呼吸治療装置のPEEP制御パラメータが初期化される。
2.その後、PEEPパラメータがデクリメントされ(例えば、呼吸毎に)、コンプライアンスが求められる1つ又は複数の呼吸の関連するそのPEEPパラメータに対して、対応するコンプライアンス値がステップ毎に求められるか、又は監視される。
3.結果として生成されるコンプライアンスの傾向を用いて、著しい減少を示す変曲点が位置特定される。
4.適切なPEEPパラメータが、例えば、変曲点に対応する圧力レベルよりも1インクリメント分高い圧力レベルとして選択される。この変曲点は、図19のグラフにおいて、矢印a−19で示される。
【0120】
圧力支援PSのための最大限度の自動滴定の実施形態の一例では、滴定装置(例えば、自動滴定呼吸治療装置)のプロセッサはまた、以下のような方法を用いて実現することができ、その方法はオプションで先行するPEEP滴定法に従うことができる。
1.PSを更に用いることなく、肺胞の最大の漸増を確保するために、より高い値(例えば、10cmH2O〜15cmH2O)において、PEEP制御パラメータが初期化される。
2.その後、各ステップにおいて監視されるコンプライアンスにおいて著しい降下が観測されるまで、PEEPパラメータがインクリメントされる(例えば、呼吸毎)。
3.変曲点に対応する圧力レベルよりも1インクリメント分低い圧力レベルのような、適切な最大PS限度が選択される。これも、図19において、矢印b−19において示される変曲点で示される。
【0121】
技術的な実施形態の例
本技術のいくつかの実施形態では、人工呼吸器−患者非同期性事象の一般的な発生だけでなく、図3〜図9において例示された非同期性事象のうちの2つ以上のような異なるタイプの非同期性事象を検出するために、自動方法が実施される。複数の異なる非同期性事象のこの検出は、人工呼吸器又は他の呼吸治療デバイスによる換気補助の送達中に、適切なセンサによって測定される流れ信号及び/又は圧力信号からのデータの自動処理によって実施することができる。例えば、異なる事象の検出は、例えば、呼吸数に基づく特徴、体積に基づく特徴、呼吸機構に基づく特徴、呼気流形態に基づく特徴、電力に基づく特徴、又は本明細書において参照される他の特徴等を含む、圧力及び/又は流れデータによって導出可能である1組の検出変数を予め決定することに基づくことができる。例えば、そのような検出変数は、以下の検出変数例:RR呼吸、RR比、IE比、VolI、VolE、breathLeak、Vol比、PEEPii、Ri、Ci、Taui、PEEPie、Re、Ce、Taue、InterpMinima、InterpMinima−2/3、PW線形近似電力、PW体積偏差、PW距離流最大最小、PW距離比、電力Φint、電力(2/3)Φint、電力Φpw、積分Φpw、勾配−a、勾配−b、振幅p−tΦpw、持続時間p−tΦpw、volIE、zxUpCount、maxFlowIE、heightIE、durIE、rangeP−P、durP−P、ampRatio、volRatio、durRatio、locationIE,peaksCount、timeElapsed、falseExpVol、及び/又はexpRatioのうちのいずれか1つ又は複数とすることができる。
【0122】
1組の変数は、先に説明されたようなオプションの特徴部分集合選択過程に従って選択することができる。検出変数の選択された部分集合を、1つ又は複数のしきい値又はしきい値関数と比較して、それらの変数を用いて事象条件を検出することができる。選択された変数のためのしきい値は、本明細書において検討されるような、観測された事象の経験的/臨床的分類に従って、適切な自動分類判定基準によって判定又は最適化することができる。さらに、変数の評価及び事象条件の検出は、自動呼吸相検出(例えば、先に示された状態図を実施したものによる、吸気相又は呼気相の検出)に更に基づくことができる。
【0123】
その1組の変数を評価することによって異なるタイプの非同期性を検出するための自動処理は、予め記録された流れ及び/又は圧力データを用いる処理装置(例えば、メモリ及び1つ又は複数のプロセッサを有するプログラムされた汎用コンピュータ、又は専用コンピュータ)によって、又はそのような尺度が求められている間に治療中の人工呼吸器によって実行することができる。したがって、その方法は、本明細書において示される検出方法を具現するソフトウエア又はファームウエアを有する1つ又は複数のプロセッサによって、かつ/又は特定用途向け集積チップによって実施することができる。本技術のいくつかの実施形態では、検出された事象に従って、人工呼吸器による呼吸治療に対する調整を自動化することができる。例えば、1つのタイプの事象が、異なる自動人工呼吸器応答又は呼吸治療応答を生成できるように、どの非同期性タイプが検出されたかに従って、人工呼吸器の制御された治療応答を変更することができる。さらに、検出された事象は、記録されるか、又はスコア化することができる。したがって、そのような装置は、何回発生したか、いつ発生したか等の種々の事象の発生詳細に関する報告を生成することができる。これらの詳細は、オプションで、検出変数の値に関連付けて、又は1組の検出変数及び他の流れ又は圧力データに関連付けて表示することができる。
【0124】
例えば、一実施形態では、循環呼吸治療装置を用いて呼吸治療中に取り込まれる流れ及び/又は圧力測定値を表すデータから、処理装置又は呼吸治療装置によって、複数の異なる非同期性事象又は1つの非同期性事象を検出することができる。1つのそのような実施形態では、1組の検出変数は、処理装置又は呼吸治療装置のプロセッサによって決定される、PW線形近似電力、PW距離流最大最小、PW体積偏差、Taui及びPW距離比の尺度のうちの1つ又は複数を含むことができる。その後、これらの変数を、処理装置によって、その関連付けられる所定のしきい値と比較し、無効呼気努力非同期性事象が生じたか否かを検出することができる。処理装置又は呼吸治療装置は更に、ポストトリガー努力、ダブルトリガー、自動トリガー、後期トリガー、早期循環及び/又は後期循環のうちの1つまたは複数のような他のタイプの非同期性事象を検出するか、又はスコア化することができる。
【0125】
オプションでは、いくつかの実施形態において、これらの非同期性事象の検出は、咳、嚥下等の人為現象の自動検出時に、装置によって除外することができる(すなわち、スコア化されない)。そのような事象の判定は、国際公開第2006/079152号において示されており、その開示全体が参照により本明細書に援用される。
【0126】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータから2つ以上の異なるタイプの非同期性事象を自動的に検出するように装置が構成される。
【0127】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、無効呼気努力非同期性事象を自動的に検出するように装置が構成される。
【0128】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、無効呼気努力非同期性事象を自動的に検出するように装置が構成され、その検出は、PW線形近似電力、PW距離流最大最小、PW体積偏差、Taui及びPW距離比のような、呼吸機構に基づく特徴及び/又は呼気流形態に基づく特徴を表す、2つ以上の計算された特徴の解析を伴う。例えば、その解析は、計算された特徴と、1組のしきい値又はしきい値関数との比較とすることができる。
【0129】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、ポストトリガー努力非同期性事象を自動的に検出するように装置が構成される。
【0130】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、ダブルトリガー非同期性事象を自動的に検出するように装置が構成される。
【0131】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、自動トリガー非同期性事象を自動的に検出するように装置が構成される。
【0132】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、後期トリガー非同期性事象を自動的に検出するように装置が構成される。
【0133】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、早期循環非同期性事象を自動的に検出するように装置が構成される。
【0134】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、後期循環非同期性事象を自動的に検出するように装置が構成される。
【0135】
検出された非同期性事象のうちのいずれか1つ、いくつか、又は全てが、流れ又は圧力測定値の処理に基づいて、患者−人工呼吸器相互作用の品質を非侵襲的に、かつ簡単に判定するための測定基準としての役割を果たすことができる。したがって、他の測定デバイス又は機器は必ずしも用いられる必要はない。
【0136】
実施されるいくつかの実施形態では、数多くの患者からのデータの経験的又は臨床的観察からしきい値を最適化することができるが、先に言及された特徴のいずれかを利用する非同期性検出は、特定の患者からの流れ及び/圧力データを臨床的に観察することによって、かつ先に言及された方法によるその特定の患者のための自動特徴選択、及び選択された特徴の自動分類を利用することによって、特定の患者に対して最適化することもできる。したがって、特徴部分集合選択及びしきい値判定を実行するようにプログラムされる別個の調整装置又はコンピュータによって行なわれる特徴の自動選択及びしきい値判定の結果に従って、検出又は治療装置を被検者毎に調整又はプログラムすることができる。オプションでは、これらの方法は、人工呼吸器又は呼吸治療デバイスのプログラミングの中に組み込むこともできる。
【0137】
非同期性事象の検出が実施される装置は、生理的パラメータが特定の非同期性に及ぼす影響を関連付けることによって、非同期性の仕組みを理解できるようにするための手段としての役割を果たすことができる。
【0138】
また、その装置は、特定の被検者のための患者−人工呼吸器使用時の非同期性を予測するための手段としての役割も果たすことができる。したがって、その被検者の呼吸器治療のための予後を、治療へのコンプライアンス、入院加療滞在、ウィーニング成功、死亡率、COPD増悪の発生、睡眠品質等に関して評価することができる。
【0139】
人工呼吸器又は循環呼吸治療デバイスにおける種々のタイプの非同期性事象のうちの1つ又は複数の自動検出は、患者治療中のデバイスのサーボ滴定のための制御フィードバックとしての役割を果たすことができる(例えば、スマート治療アルゴリズム)。
【0140】
本発明の他の実施形態及び変更形態は、本開示の細部の全てを検討することから明らかになるであろう。
【0141】
呼吸治療装置実施形態の例
図11を参照すると、本非同期性検出技術は、人工呼吸器又は他の呼吸治療装置のような、呼吸治療装置1102を用いて実施することができ、その装置は、治療動作と患者呼吸とを同期させる。そのような装置は、サーボ制御式送風機1104のような流れ発生器を含むことができる。送風機1104は通常、給気口と、モータ(図示せず)によって駆動されるインペラとを備えることができる。
【0142】
呼吸治療装置1102は通常、患者に呼吸可能ガスの流れを、かつ/又は患者から空気の流れを搬送するために、空気送達管1106及びマスク1108又は気管内チューブ(図示せず)のような患者インターフェースも備える。
【0143】
装置1102は、圧力センサ及び/又は流れセンサのようなセンサ1110も備えることができる。そのような実施形態では、圧力変換器のような圧力センサは、送風機1104によって生成される圧力を測定し、気道における圧力のような、圧力の測定値を指示する圧力信号p(t)を生成することができる。同様に、流れセンサは、患者の呼吸の流れを表す信号を生成する。例えば、呼吸流量計、及びチューブ又はダクトの束を利用するような差圧変換器又は類似のデバイスを用いて、患者インターフェース又はセンスチューブ(図示せず)に隣接する流れを測定し、流れ信号f(t)を導出することができる。オプションでは、この流れ信号を調整して、オフセット及び漏れを補償することができる。装置の方法の目的を果たすために、他のセンサを利用して、流れ又は圧力を指示するデータを生成することもできる。例えば、いくつかの実施形態では、装置は、経横隔膜圧を表す信号を生成する経横隔膜圧センサを含むこともできる。同様に、装置は、オプションでは、胸腔内圧及び/又は腹圧を表す1つ又は複数の信号を生成するのに適した1つ又は複数のセンサも含むことができる。
【0144】
流れf(t)及び/又は圧力p(t)信号のようなセンサ信号に基づいて、コントローラ1112が、送風機制御信号を生成することができる。例えば、コントローラは、所望の圧力設定点を生成し、その設定点を圧力センサの測定された条件と比較することによって、その設定点を満たすように送風機の速度をサーボ制御することができる。したがって、コントローラ1112は、送風機1104によって患者インターフェースに送達される圧力を制御しながら変更することができる。通常、そのような設定は、治療と患者呼吸とを同期させるために、又は患者の呼吸を支援するために行なうことができ、トリガー又は循環しきい値のような制御パラメータに関連して流れ信号を解析すること等によって、患者呼吸の状態の検出との関連で行なうことができる。オプションで、圧力の変更は、相対的に一定の送風機速度を保持しながら、機械的な放出弁(図示せず)を用いて排気を制御し、排気を増減することによって実施することができる。同様に、流れf(t)及び/又は圧力p(t)信号に基づいて、コントローラ1112は、本明細書において更に詳細に説明される本非同期性事象検出方法を実施することができる。
【0145】
したがって、コントローラ1112は、本明細書において更に詳細に説明される特定の方法又はアルゴリズムを実施するようにプログラムされる1つ又は複数のプロセッサを含むことができる。このために、コントローラは、集積チップ、メモリ及び/又は他の制御命令、データ、又は情報記憶媒体を含むことができる。例えば、そのような制御方法を包含するプログラムされた命令は、デバイスのメモリ内の集積チップ上にコーディングすることができる。そのような命令は同様に、又は代替的に、適切なデータ記憶媒体を用いてソフトウエア又はファームウエアとしてロードすることができる。
【0146】
いくつかのそのような実施形態では、コントローラは、非同期性事象を検出又はスコア化し、そのような非同期性事象の検出又はスコア化に基づいて、呼吸治療のための圧力制御パラメータを変更することができる。例えば、無効吸気努力非同期性事象のうちの1つ又は複数が検出された場合には、コントローラは、コントローラによって用いられるトリガーしきい値を自動的に下げて(例えば、ステップダウンして)、患者吸気を検出し、吸気圧力レベルの制御を開始することができる。非同期性事象を続けて検出する場合には、更にステップ変更を行なうこともできる。オプションで、複数のそのような非同期性事象を検出するのに応答して、コントローラ又はプロセッサは、臨床医のための出力メッセージを生成し、トリガーしきい値設定の変更が手動で行なわれるべきであること、又は自動的に行なわれたことを示すことができる。同様に、後期トリガー非同期事象の検出が、呼吸治療装置のトリガーしきい値に関するステップ変更又はメッセージを制御するための役割を果たす場合がある。そのような場合、後期トリガーに応答して行なわれるか、又は推奨されるステップ変更は、無効努力非同期性事象の検出に関連付けられるステップ変更よりも小さくすることができる。
【0147】
更に別の例として、自動トリガー非同期性事象の検出が、1つ又は複数のステップ変更又はメッセージを制御して、呼吸治療装置のトリガーしきい値を上げるための役割を果たす場合がある。種々の非同期性事象に基づいてトリガーしきい値のステップ増加及び減少を制御して、これらの事象のカウントを減少させることによって、トリガーしきい値を最適な設定にサーボ制御することができる。
【0148】
同じようにして、後期循環及び/又は早期循環事象の検出時に、コントローラ又はプロセッサによって呼吸治療装置の循環しきい値の調整が行なわれるか、又は推奨され、これらの事象を低減し、それにより循環しきい値のための設定を最適化することができる。
【0149】
非同期性事象の検出に従って、呼吸治療装置の制御パラメータに対する他の変更も行なうこともできるし、推奨することもできる。
【0150】
コントローラ/処理装置アーキテクチャの例
処理装置(例えば、コンピュータ又はコントローラ1112)のシステムアーキテクチャ例が図12のブロック図に示される。そのシステムアーキテクチャは、非同期性検出を有する呼吸治療装置コントローラとしての役割を果たす場合があるか、又はより単純に、専用コンピュータのようなスタンドアローンの非同期性検出器としての役割を果たす場合がある。図において、検出デバイス1206は、1つ又は複数のプログラマブルプロセッサ1208を有する汎用コンピュータによって実現することができる。また、そのデバイスは、先に検討されたような検出方法からのデータ(例えば、非同期性事象及び情報等)、本明細書において説明されるような結果又はグラフを、モニタ又はLCDパネルのようなディスプレイに出力するためのディスプレイインターフェース1210も含むことができる。データを入力するために、又は別の方法で本明細書において記述される方法を起動又は動作させるために、ユーザ制御/入力インターフェース1212、例えば、キーボード、タッチパネル、制御ボタン、マウス等を含むこともできる。また、そのデバイスは、上記の方法のプログラミング命令、流れデータ、圧力データ、非同期性データ、特徴集合計算アルゴリズム、特徴部分集合選択アルゴリズム、特徴集合値及び他の出力又は入力のようなデータを受信/送信するための、バスのようなセンサ又はデータインターフェース1214も含むことができる。
【0151】
また、そのデバイスは、上記の方法及びアルゴリズムの制御命令及びデータを含む、メモリ/データ記憶構成要素1220も含む。1222において、これらの構成要素は、本明細書において更に詳細に検討されるような非同期性事象検出のための格納されたプロセッサ制御命令も含むことができる。例えば、これは、特徴集合値計算命令及びしきい値又はしきい値関数比較命令を含むことができる。例えば、1224において、それらの構成要素は、特徴計算及び呼吸セグメント化のような、流れ及び圧力信号を処理するための格納されたプロセッサ制御命令を含むことができる。1226において、それらの構成要素は、呼吸治療制御パラメータ、換気制御パラメータ、又は圧力治療同期方法のような、デバイスの起動を制御するためのプロセッサ制御命令も含むことができる。これは、例えば、検出された非同期性事象に基づく圧力制御調整等を含むことができる。オプションで、又は代替的には、1228において、それらの構成要素は、パルツェン窓推定器、SFFS選択器等のための命令のような、特徴集合判定のためのプロセッサ制御命令を含むことができる。最後に、それらの構成要素は、1230において、流れデータ、圧力データ、呼吸セグメント化データ、1つ又は複数の非同期性事象を検出するための特徴集合、特徴集合値、しきい値、しきい値関数、検出された非同期性事象及び関連する情報、既知の非同期性事象データ、特徴部分集合、特徴上位集合、報告及びグラフ等の、これらの方法のための格納されたデータも含むことができる。
【0152】
いくつかの実施形態において、上記の方法を制御するためのプロセッサ制御命令及びデータのいくつか又は全てを、汎用コンピュータによって用いるためのソフトウエアとしてコンピュータ可読記録媒体内に含めることができ、それにより、そのソフトウエアを汎用コンピュータにロードする際に、本明細書において検討される方法のいずれかに従って、汎用コンピュータが専用コンピュータとしての役割を果たすことができるようになる。
【0153】
これまでの説明において、かつ添付の図面において、本技術を完全に理解してもらうために、特定の用語、式及び図面記号が記述されてきた。場合によっては、その用語及び記号は、本技術を実施するのに必要ではない具体的な細かい部分を含むことができる。さらに、本明細書における技術は、特定の実施形態を参照しながら説明されてきたが、これらの実施形態は本技術の原理及び用途を例示するにすぎないことは理解されたい。それゆえ、本技術の精神及び範囲から逸脱することなく、例示される実施形態に数多くの変更を加えることができること、及び他の構成を考案することができることが理解されたい。例えば、いくつかの検出器の実施形態では、流れ及び/又は圧力データに加えて、特徴集合は、経横隔膜圧信号からのデータに基づくこともできる。
【符号の説明】
【0154】
1102:呼吸治療装置
1104:送風機
1106:空気送達管
1108:マスク
1110:センサ
1112:コントローラ
【技術分野】
【0001】
(関連出願の相互参照)
本出願は、2009年4月22日に出願の米国仮特許出願第61/171,606号の出願日の利益を主張し、該仮特許出願は、その開示内容を参照することにより、本明細書の一部をなすものとする。
【0002】
本技術は、非同期性を示す条件のような、呼吸治療に関連する条件又は事象を検出するための方法及び装置に関する。
【背景技術】
【0003】
患者と該患者の呼吸治療装置との間の高品質の相互作用を確保することが重要となる可能性がある。例えば、患者と該患者の人工呼吸器との間の高品質の相互作用は、患者の呼吸仕事量を最小限に抑えるのに不可欠である。患者−人工呼吸器の非同期性によって引き起こされる呼吸仕事量の増加は、おもわしくない患者の予後に結び付いており、非常に蔓延していることがわかっている。調査によれば、人工呼吸器によって送達される呼吸の47%までが非同期性となる可能性があることがわかっている。
【0004】
人工呼吸器の設定を適切に監視し、調整することによって、臨床医が非同期性を手動で軽減することができる。しかしながら、非同期性を監視することは難しい問題である。その存在を知るには、人工呼吸器によって送達される気道内圧、患者の気流、及びバルーンカテーテルを介して非侵襲的に測定される横隔膜EMG又は食道内圧のような、吸気活動の指標を、高分解能でかつリアルタイムに表示することが必要とされる場合がある。さらに、患者−人工呼吸器の相互作用の品質を診断するには、これらの信号を専門家が目で見て解釈することが不可欠である可能性がある。
【0005】
呼吸治療装置を改善することができる、非同期性を自動的に検出するための更なる方法及び装置を開発することが望ましい場合がある。
【発明の概要】
【0006】
本技術の態様は、非同期性を検出するための方法及び装置を含む。
【0007】
本技術のまた更なる態様は、非同期性を検出するためのデバイスを開発するための方法及び装置を含む。
【0008】
1つのそのような実施形態例では、同期した呼吸治療の送達を制御する呼吸治療装置の非同期性を検出するための自動処理方法が提供される。本方法は、前記呼吸治療装置と結合された少なくとも1つのセンサの信号から導出されるデータを用いて特徴集合の検出値を求めることを含むことができる。本方法は、プロセッサを用いて、前記検出値の特徴集合を1組のしきい値と比較することを更に含むことができる。本方法は、前記プロセッサを用いて、前記比較に基づいて、前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定することを更に含むことができる。
【0009】
別の実施形態では、同期した呼吸治療と呼吸サイクルとの間の非同期性を検出するための装置が提供される。本装置は、前記呼吸治療装置と結合された少なくとも1つのセンサの信号から導出される検出値の特徴集合を表すデータを含むメモリを備えることができる。本装置は、前記データにアクセスするためのプロセッサを備えることができる。該プロセッサは、前記検出値の特徴集合のデータと前記メモリの1組のしきい値との比較を制御するように構成することができる。プロセッサは、前記比較に基づく前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生の判定を制御するように構成することもできる。さらに、プロセッサは、前記非同期性事象の発生を表す出力の生成を制御するように構成することができる。
【0010】
いくつかの実施形態において、検出値の特徴集合は、呼吸数に基づく特徴、呼吸量に基づく特徴、呼吸機構に基づく特徴、呼気流形態に基づく特徴のうちのいずれか1つ又は複数を含む場合がある。
【0011】
いくつかの実施形態において、本装置又は本方法は、比較に基づいて複数の異なる非同期性事象を判定又は特定することもできる。非同期性事象は、無効呼気努力事象、ポストトリガー努力事象、ダブルトリガー事象、自動トリガー事象、後期トリガー事象、早期循環事象及び/又は無効吸気努力事象のうちのいずれか1つ又は複数とすることができる。
【0012】
一例示の実施形態では、無効吸気努力事象を検出する前記検出値の特徴集合は、(a)最大呼気流の位置以降の呼気の残りの部分の区分的双線形近似の電力、(b)移動平均呼気流の最大値と最小値との間の距離、(c)整流され、トレンドを除去された呼気流移動平均の積分、(d)吸気時定数、及び(e)前記距離及びピーク呼気流の或る割合を含むことができる。
【0013】
いくつかの実施形態において、プロセッサは、呼吸治療装置のコントローラ、又はそのコントローラの一部とすることができ、その装置は人工呼吸器とすることができ、センサは流れセンサとすることができる。その際、コントローラは、流れセンサの信号を用いて呼吸サイクルを検出し、呼吸治療をもたらすための流れ発生器制御信号を生成するように構成することができる。
【0014】
方法又は装置のいくつかの実施形態では、特徴集合は、その特徴集合が特徴の上位集合の部分集合を含むように、選択過程によって選択される。そのような選択過程は、プロセッサを用いて、複数の呼吸治療装置を用いて確立された複数の呼吸のデータにおいて生じる既知の非同期性事象のための上位集合の値を評価することを含むことができる。評価過程は、パルツェン窓推定によって、上位集合の値を用いて事後確率を計算することを含むことができ、上位集合の値群は、値を繰返し包含及び除去することによって選択される。また、その評価は、特徴の選択された部分集合を用いて非同期性事象を検出すること、及び検出された事象を既知の事象データと比較し、その部分集合の性能を試験又は評価することも含むことができる。
【0015】
いくつかの実施形態では、その装置は、患者に対して呼吸可能ガスの流れを搬送するための患者インターフェースを備えることができる。また、その装置は、患者インターフェースと結合され、患者インターフェースを通して呼吸可能ガスの流れを生成するための流れ発生器を備える。また、その装置は、圧力変換器又は差圧変換器のような変換器を備える場合もある。その変換器は、患者インターフェースを通って流れる患者流を示す信号を与えることができる。プロセッサは、流れ発生器のコントローラとしての役割を果たすことができ、該コントローラは、流れセンサの信号を用いて呼吸サイクルを検出し、呼吸治療をもたらすための流れ発生器制御信号を生成するように構成される。
【0016】
いくつかの実施形態では、同期した呼吸治療と呼吸サイクルとの間の非同期性を検出するためのシステムが提供される。本システムは、呼吸治療装置の使用からもたらされる1つ又は複数の圧力変換器信号から導出されるデータを処理する処理手段を備える。前記処理手段は、(a)前記データから計算される検出値の特徴集合を1組のしきい値と比較し、(b)前記比較に基づいて、前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定するように構成することができる。本システムは、前記特徴集合が特徴の上位集合の部分集合を含むように該特徴集合を選択する分類手段を更に備えることができ、前記選択は、複数の呼吸治療装置によって確立される複数の呼吸のデータにおいて生じる既知の非同期性事象のための前記上位集合の値を評価することを含む。本システムの前記処理手段は、少なくとも1つのセンサの信号から導出されるデータを用いて前記特徴集合の前記検出値を計算するように構成することもできる。
【0017】
そのようなシステムのいくつかの実施形態では、前記検出値の特徴集合は、(a)呼吸数に基づく特徴、(b)呼吸量に基づく特徴、(c)呼吸機構に基づく特徴、(d)呼気流形態に基づく特徴からなる一群の特徴のうちの2つ以上の特徴とすることができる。
【0018】
そのようなシステムの更なる実施形態では、前記非同期性事象の発生は、(a)無効呼気努力事象、(b)事後トリガー努力事象、(c)ダブルトリガー事象、(d)自動トリガー事象、(e)後期トリガー事象、(f)早期循環事象、及び(g)後期循環事象からなる一群の非同期性事象のうちの1つの非同期性事象とすることができる。
【0019】
本システムは、呼吸可能ガスの流れを搬送するインターフェース手段と、前記インターフェース手段と結合され、前記呼吸可能ガスを生成する流れ発生手段と、前記圧力変換器信号を生成するための流れセンサとを更に備えることができる。そのようなシステムでは、前記処理手段は、前記流れ発生手段を制御して、呼吸支援人工呼吸のような同期した呼吸治療を提供するように更に構成することができる。
【0020】
いくつかの実施形態では、その方法は、メモリのような情報保持媒体上に含むことができる。例えば、情報保持媒体は、該情報保持媒体上にプロセッサ可読情報を有する場合がある。プロセッサ可読情報は、同期した呼吸治療と呼吸サイクルとの間の非同期性を検出するための装置を制御することができる。その際、プロセッサ可読情報は、呼吸治療装置と結合された少なくとも1つのセンサの信号から導出されるデータを用いて特徴集合の検出値にアクセスするための制御命令、検出値の特徴集合を1組の格納されたデータしきい値と比較するための制御命令、及び比較に基づいて、呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定するための制御命令を含むことができる。
【0021】
本技術のいくつかの実施形態では、呼吸治療装置が、流れ指標及び圧力指標に基づいて呼吸抵抗及びコンプライアンスを推定する。本装置は、流れ(flow:フロー)及び圧力を表す信号を生成するための1つ又は複数のセンサを備えることができる。本装置は、前記1つ又は複数のセンサと結合されたプロセッサも備えることができる。該プロセッサは、前記流れ信号のデータから呼吸サイクルの呼気部分を検出するのを制御するように構成することができる。プロセッサは、前記検出された呼気部分に対応する流れ、圧力及び体積指標を用いて、抵抗値及びコンプライアンス値を計算するのを制御するように構成することもできる。
【0022】
いくつかの実施形態において、検出された呼気部分は、呼気サイクルにおいて開始し、呼気サイクルの間に吐出される一回換気量が約85パーセント〜90パーセントの範囲内の限度を超えるときに終了する部分とすることができる。オプションで、流れ指標、圧力指標、及び体積指標を表すデータによる多重線形回帰分析によって、コンプライアンス値及び抵抗値を計算することができる。さらに、この値は、呼吸過程毎に計算することもできる。プロセッサは、求められた抵抗値及びコンプライアンス値の精度の評価を制御するように更に構成することができる。精度の評価は、決定係数を計算すること、及びその係数をしきい値と比較することを含むことができる。
【0023】
いくつかの実施形態において、呼吸治療装置のプロセッサは、該プロセッサによって求められた複数のコンプライアンス値に基づいてPEEP制御パラメータを求めるのを制御するように更に構成することができる。そのような過程において、プロセッサは、予め設定されたPEEP制御パラメータに対する、段階的引下げのような繰り返される変化を制御することができ、その間に複数の圧力測定値及び流れ測定値が求められる。その後、複数の圧力測定値及び流れ測定値に基づいて、複数のコンプライアンス値を求めることができる。こうして値を求めることは、複数のコンプライアンス値を表すデータから変曲点を検出することを含むことができる。
【0024】
いくつかの実施形態において、呼吸治療装置のプロセッサは、求められた複数のコンプライアンス値に基づいて、最大圧支援限界を求めるのを制御するように構成することもできる。そのような過程において、プロセッサは、予め設定されたPEEP制御パラメータに対する、段階的引下げのような繰り返される変化を制御することができ、その間に複数の圧力測定値及び流れ測定値が求められる。その後、複数の圧力測定値及び流れ測定値に基づいて、複数のコンプライアンス値を求めることができる。オプションでは、最大圧支援限界を求めることは、複数のコンプライアンス値を表すデータから変曲点を検出することを含むことができる。いくつかのそのような実施形態において、呼吸治療装置は、プロセッサと結合され、該プロセッサからの制御信号に基づいて、患者インターフェースに対して大気圧より高い圧力において呼吸可能ガス流を生成するための流れ発生器を含むこともできる。
【0025】
この技術の更なる実施形態及び特徴は、以下の詳細な開示、特許請求の範囲及び図面から明らかになるであろう。
【0026】
本技術は、限定するのではなく、一例として添付の図面において示されており、該図面では、類似の参照番号は類似の構成要素を参照する。
【図面の簡単な説明】
【0027】
【図1】本技術の非同期性検出器の一例のブロック図である。
【図2】図1の非同期性検出器のいくつかの実施形態において実施される場合がある方法の一例による流れ図である。
【図3】本非同期性検出技術を用いて検出される場合がある無効呼気努力非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図4】本非同期性検出技術を用いて検出される場合があるポストトリガー努力非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図5】本非同期性検出技術を用いて検出される場合があるダブルトリガー非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図6】本非同期性検出技術を用いて検出される場合がある自動トリガー非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図7】本非同期性検出技術を用いて検出される場合がある後期トリガー非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図8】本非同期性検出技術を用いて検出される場合がある早期循環非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図9】本非同期性検出技術を用いて検出される場合がある後期循環非同期性事象及び無効吸気努力非同期性事象に対応する流れ、圧力及び経横隔膜圧を示すグラフである。
【図10】本技術のいくつかの実施形態において状態機械が呼吸に関連する状態を検出する図である。
【図11】非同期性検出コントローラを備える呼吸治療装置の一例の図である。
【図12】本技術の実施形態の場合に処理装置又はコントローラとして実装される場合がある適切な構成要素を示すブロック図である。
【図13】非同期性事象を手動で分類するのに適しているユーザインターフェースの一例のスクリーンショットの図である。
【図14】呼気流、及び特徴を判定することができる無効呼気努力非同期性事象の指示子を有する出力信号の自動処理又は解析のステップを示す2つのグラフである。
【図15】呼気流、及び特徴を判定することができる無効呼気努力非同期性事象の指示子を有する出力信号の自動処理又は解析の更なるステップを示す2つのグラフである。
【図16】無効呼気努力非同期性事象を検出するのに適しているいくつかの特徴を判定する際の自動解析の付加的な態様を示すグラフである。
【図17】無効呼気努力非同期性事象を検出するのに適しているいくつかの特徴を判定する際の自動解析の更に別の態様、及びそれらの特徴のうちのいくつかを示すグラフである。
【図18】ダブルトリガー非同期性事象を検出するのに適しているいくつかの特徴を判定する際の自動解析の態様、及びそれらの特徴のうちのいくつかを示すグラフである。
【図19】本技術の求められた呼吸機構値に基づく滴定法の例を示すグラフである。
【発明を実施するための形態】
【0028】
(詳細な説明)
本技術は呼吸治療の送達に関連する非同期性事象の自動検出を含む。非同期性は、患者の呼吸の実際の状態が、患者の呼吸と同期するように意図された自動呼吸治療と一致していない状況を含む。先に言及されたように、非同期性は、患者−人工呼吸器相互作用において生じる可能性がある。現在の技術を用いて、非同期性検出器を開発又は実現することができる。そのような検出器は、1つ又は複数の非同期性事象が発生したか、又は発生しつつあるか否かを判断するための役割を果たすことができる。また、1つ又は複数の異なるタイプの非同期性事象を特定又は分類するように、それらの検出器を実施することもできる。
【0029】
図1には、非同期性検出の実施形態が示される。通常、プログラムされたプロセッサのような非同期性検出器100が、同期した呼吸治療を提供する呼吸治療装置に関連付けられる1つ又は複数のセンサからのデータ又は信号にアクセスすることができる。例えば、データは、そのような装置の流れセンサ及び/又は圧力センサから取り込まれる流れf(t)及び/又は圧力p(t)信号に基づく場合がある。その後、このデータに基づいて、検出器100は、非同期性事象を検出又は特定することができる。
【0030】
例えば、いくつかの実施形態において、その検出器は、図2の流れ図において示される方法を実施することができる。220において、プロセッサが、呼吸治療装置と結合される少なくとも1つのセンサの信号から導出されるデータを用いて、特徴集合の検出値にアクセスすることができる。その後、プロセッサは、その検出値を評価することができる。例えば、222において、プロセッサは、その後、特徴集合の検出値を1組の格納されたデータしきい値と比較することができる。224において、プロセッサは、その評価又は比較に基づいて、呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定することができる。
【0031】
検出された事象の情報は、デバイスのメモリに記録することができ、かつ/又はディスプレイ装置に出力することができる。同様に、その情報は、他の処理装置を用いて精査又は解析するために送信される場合がある(例えば、有線通信又は無線通信による)。それらの事象の情報を表す格納又は記録されたデータは、例えば、事象タイプの識別情報(identification)、発生時刻、使用期間中の全ての非同期性事象の総数、使用期間中に検出された事象のタイプ毎の総数等を含む場合がある。その装置のセンサの他のデータを1つ又は複数の非同期性事象に関連付けることができ、また、非同期性事象情報とともに、更なる解析のために格納することもできる。例えば、非同期であると特定される、患者の呼吸サイクル毎の流れ(flow:フロー)及び/又は圧力信号データを格納することができる。
【0032】
いくつかの実施形態において、非同期性事象をプロセッサによってスコア化し、出力することができる。そのスコアは、特定の呼吸治療装置、又はその装置による治療セッションのための性能指標として用いることができる。例えば、そのスコアは、時間期間(例えば、治療期間)当たり、又は人工呼吸器の送達された呼吸当たりの非同期性事象の回数の比率として表すことができる。
【0033】
また、プロセッサは、スコア化された事象を解析し、呼吸治療装置の治療制御に対する変更を実施又は推奨するように構成することもできる。例えば、本明細書において更に詳細に検討されるように、検出された非同期性事象は、呼吸治療装置によって送達される圧力治療の特定の制御パラメータを自動的に変更するための処理制御ロジックの一部としての役割を果たすことができる。同様に、検出された非同期性事象は、呼吸治療装置によって送達される圧力治療の特定の制御パラメータを手動で変更することを推奨するメッセージを自動的に出力するための処理制御ロジックの一部としての役割を果たすことができる。
【0034】
検出可能な非同期性事象の例
いくつかの実施形態において、非同期性検出器100は、図3〜図9においてグラフで示される種々のタイプの非同期性事象のうちのいずれか1つ又は複数を検出するように構成することができる。本明細書において更に検討されるように、例示される事象は、無効呼気努力事象、ポストトリガー努力事象、ダブルトリガー事象、自動トリガー事象、後期トリガー事象、早期循環事象、後期循環事象及び/又は無効吸気努力事象とみなすことができる。
【0035】
図3は、無効吸気努力事象の一例のグラフである。そのグラフは、セクションAにおける通常の呼吸中の流れ信号、気道内圧(「Pao」)信号及び経横隔膜圧(「Pdi」)信号、並びにセクションBにおける無効呼気努力事象を伴う呼吸のプロットを有する。Pdiにおける正の振れは、患者による吸気努力を示す。図示されるように、セクションBの呼吸は、呼気中央部において流れ信号上に支配的な摂動を有する。この非同期性事象は、呼気中に換気に伴ってPdiが正に振れるが、その後、呼吸治療装置又は人工呼吸器からの吸気支援が行われないと特徴付けることもできる。
【0036】
図4は、ポストトリガー努力事象の一例のグラフである。そのグラフは、セクションAにおける通常の呼吸中の流れ信号、気道内圧Pao信号及び経横隔膜圧Pdi信号、並びにセクションBにおけるポストトリガー努力事象を伴う呼吸のプロットを有する。そのグラフは、呼吸治療装置又は人工呼吸器がトリガーした後に開始し、装置が吸気支援送達し、結果として流れが増加している間に生じる、換気に伴うPdiの正の振れを示す。この例のセクションBにおける吸気支援の開始は、機械によってトリガーされる。
【0037】
図5は、ダブルトリガー事象の一例のグラフである。そのグラフは、セクションA及びCにおける2回の通常の呼吸中の流れ信号、気道内圧Pao信号及び経横隔膜圧Pdi信号、並びにセクションBにおけるダブルトリガー事象を伴う呼吸をプロットする。換気に伴うPdiの単一の振れにわたって2回の機械的呼吸が送達される。第1のサイクルは患者によってトリガーされ、非常に短い呼気時間だけ第2のサイクルから分離され、その呼気時間は、平均吸気時間(5分間超)の約半分未満と規定することができる。
【0038】
図6は、自動トリガー事象の一例のグラフである。そのグラフは、セクションA及びCにおける2回の通常の呼吸中の流れ信号、気道内圧Pao信号及び経横隔膜圧Pdi信号、並びにセクションBにおける一連の自動トリガー事象をプロットする。その事象は、呼吸治療装置又は人工呼吸器によって吸気支援が送達されるが、それに付随してPdiの振れが生じないことを含むことができ、振れがあれば患者努力を示すことになったであろう。これは、患者によってトリガーされなかった呼吸をデバイスが送達したことを示すとみなすことができる。
【0039】
図7は、後期トリガー事象の一例のグラフである。そのグラフは、セクションBにおける通常の呼吸中の流れ信号、気道内圧Pao信号及び経横隔膜圧Pdi信号、並びにセクションAにおける後期トリガー事象を伴う呼吸をプロットする。そのグラフは、呼気中にPdiにおいて換気に伴う正の振れがあるが、その後、150msよりも長い時間が経過するまで、デバイスからの吸気圧支援が行なわれないことを示す。Pdiの増加は、患者努力の開始が、デバイスが圧力支援を送達してから150msよりも長い時間が経過したことを示す。
【0040】
図8は、早期循環事象の一例のグラフである。そのグラフは、セクションAにおける通常の呼吸中の流れ信号、気道内圧Pao信号及び経横隔膜圧Pdi信号、並びにセクションBにおける早期循環事象を伴う呼吸をプロットする。患者のPdiの換気に伴う振れの終了前に、デバイスによる吸気支援が停止又は終了しており(例えば、デバイスの呼気状態に進んでおり)、患者の努力がデバイスの機械的呼吸を過ぎて延長されることを示すことができる。
【0041】
図9は、後期循環事象の一例のグラフである。そのグラフは、後期循環事象を伴う呼吸中の流れ信号、気道内圧Pao信号及び経横隔膜圧Pdi信号をプロットする。その事象は、デバイスの吸気時間の延長、又は吸気状態が患者の吸気努力の終了を過ぎているとして特徴付けることができる。例えば、その事象は、時間Tbが時間Taの半分よりも長い(例えば、Tb>Ta/2)ときに存在すると考えることができる。ただし、
Tbは、患者努力の終了を過ぎたデバイス吸気時間の延長であり、
Taは、患者吸気努力の持続時間である。
【0042】
図9は無効吸気努力事象も示す。この事象は、2秒と3秒との間の時間スケールにおいて生じることが示される。この時間期間のグラフは、気道内圧Pao信号の関連する、又は対応する変化を生じることなく、経横隔膜圧Pdi信号が増減することを示す。
【0043】
特徴集合の例
先に言及されたように、いくつかの実施形態において、検出器100は、例えば、1つ又は複数の特徴集合の検出値を用いて1つ又は複数の特定のパターンを検出することによって、特徴集合の検出値又は変数に基づいて上記の種々のタイプの非同期性事象を検出するように構成することができる。これらの集合は、患者の呼吸についての情報、及び/又は呼吸治療装置についての情報を検出するセンサ信号から計算されるか、又は判定される1つ又は複数の特徴を含むことができる。例えば、本技術の実施形態は、図3〜図9のグラフにおいて示されるような測定信号に基づいて、それらの特徴を利用するか、それらの特徴のための値を計算するか、又はその特徴を判定するように実施することができる。それにもかかわらず、なお更なる実施形態では、それらの特徴は、侵襲的な経横隔膜圧センサではなく、圧力センサ及び/又は流れセンサの非侵襲的な測定信号に基づくことができる。
【0044】
検出値の集合の特徴例は、圧力及び/又は流れデータを用いて導出可能である、呼吸数に基づく特徴、体積に基づく特徴、呼吸機構に基づく特徴、呼気流形態に基づく特徴、電力に基づく特徴等を含むことができる。例えば、本明細書において更に詳細に検討されるように、そのような検出変数は、以下の検出変数:RR呼吸、RR比、IE比、VolI、VolE、breathLeak、Vol比、PEEPii、Ri、Ci、Taui、PEEPie、Re、Ce、Taue、InterpMinima、InterpMinima−2/3、PW線形近似電力、PW体積偏差、PW距離流最大最小、PW距離比のうちのいずれか1つ又は複数とすることができる。そのような特徴は、それらの信号から検出されるのに応じて、呼吸毎に計算することができる。これらの特徴は以下に要約され、以下の表Iに含まれる。付加的な特徴も後に更に詳細に検討される。
【0045】
【表1】
【0046】
呼吸数に基づく特徴は以下のものを含むことができる。
RRbreath=1/Tbreath :呼吸数によるこの特徴は呼吸毎に求めることができ、その値は周期の逆数として計算することができる。
RR比=RRbreath/RRmean :呼吸数に基づくこの特徴は、5分間のような、或る時間期間にわたって計算された平均呼吸数に対する呼吸数の比として求めることができる。
IE比=Ti/Tbreath :呼吸数に基づくこの特徴は、呼吸の周期に対する、その呼吸のための吸気時間の比として求めることができる。
【0047】
呼吸毎の体積に基づく特徴は以下のものを含むことができる。
VolI −この求められた特徴は、1回の呼吸において吸入される絶対体積とみなすことができる。それは、吸気中の流れの積分として求めることができる。
VolE −この求められた特徴は、1回の呼吸において吐出される絶対体積とみなすことができる。それは、呼気中の流れの積分として求めることができる。
breathLeak=VolI−VolE :この求められた特徴は、吸気と呼気との間で漏れる体積とみなすことができる。それは、吸入される絶対体積と吐出される絶対体積との間の差として求めることができる。
Vol比=VolI/VolE :この求められた特徴は、1回の呼吸の吸気量と呼気量との比とみなすことができる。それは、吸入される絶対体積を吐出される絶対体積で除算した値として計算することができる。
【0048】
呼吸毎の呼吸機構に基づく特徴を求めることもできる。例えば、機構パラメータは、圧力、流れ及び体積データを、多重線形回帰によって以下のような一次の単一区画の肺モデルに当てはめることによって、各呼吸の吸気相及び呼気相(それぞれ下付き文字i及びeによって表される)の両方に対して計算することができる。
圧力=流れ*R+体積/C+PEEPtot
ただし、PEEPtotは、呼気中に加えられる圧力と患者の固有PEEP(呼吸終末陽圧)との和であり、
Rは呼吸器系の抵抗であり、
Cは呼吸器系のコンプライアンスである。
Tau=R*C 患者の時定数(Tau)も呼吸機構に基づく特徴であり、抵抗×コンプライアンスとして求めることができる。
【0049】
呼気流形態に基づく特徴を求めることもできる。非同期性は、圧力信号及び流れ信号における不規則性又は摂動によって特徴付けることができる。呼気中にこれらを特定するために、近似された「正常な」呼気形状から、流れ曲線の著しい偏差を導出することができる。約0.1秒のような時定数を有するセグメント化された移動平均フィルタを、呼吸相毎に別個に流れ信号に適用することができる。呼気周期毎に、呼気の最初の部分(例えば、25%)において生じる最大呼気流の場所が得られた。付加的な呼気流形態に基づく特徴は、以下のものを含むことができる。
【0050】
interpMinima −最初の部分を過ぎた呼気の残りの部分に対して、例えば、約150ミリ秒の間隔のような、離散的な間隔において極小値を求めることができる。呼気の持続時間にわたってこれらの極小値からの補間を求めることができる。その結果を用いて、減算によって移動平均をトレンド除去することができ、結果として得られた信号のための電力(RMS)を求め、患者のモード値にわたって正規化することができる。
【0051】
interpMinima−2/3 −この特徴は、トレンド除去されて補間された上記の極小信号を用いて判定することができる。補間された極小信号から、呼気の最後の3分の2のための電力(RMS)を計算し、患者のためのモード値にわたって正規化することができる。
【0052】
PW線形近似電力 −この特徴は、最大呼気流の位置以降の呼気の残りの部分に対する区分的双線形近似とみなすことができる。第2の線形成分を用いて、減算によって移動平均のトレンドを除去することができる。その後、結果として得られた信号のための電力(RMS)を求め、患者のためのモード値にわたって正規化することができる。
【0053】
PW体積偏差 −この特徴は、区分的体積偏差とみなすことができる。その特徴は、整流され、トレンドを除去された移動平均の積分として計算することができる。トレンド除去は、区分的線形近似の減算によって求めることができる。それを患者毎のモード値にわたって正規化することができる。
【0054】
PW距離流最大最小 −この特徴は、区分的距離流最大最小とみなすことができる。その特徴は、トレンドを除去された移動平均(区分的線形近似の減算による)の最小値及び最大値の指標を用いて求めることができる。その後、その最小値及び最大値を用いて、移動平均呼気流信号内の対応する実流値の位置を特定した。その後、Y方向において、これら2つの実流値間の距離を計算することができる。
【0055】
PW距離比 −この特徴は、区分的距離比とみなすことができる。その特徴は、PW距離流最大最小の比として求めることができる。それは、最大流点(予め計算される)とピーク呼気流との間の距離の或る割合として計算することができる。
【0056】
特徴集合のための付加的な特徴が、後に更に別の実施形態において検討される。
【0057】
特徴集合選択
検出器100によって実現するための、呼吸数に基づく特徴、体積に基づく特徴、呼吸機構に基づく特徴、及び呼気流形態に基づく特徴のような特徴集合は、特定の非同期性事象に対する各特徴が示す性質に基づいて設計時に選択することができる。したがって、既知の呼吸非同期性データに関連する特徴の経験的解析を利用して、本明細書において記述される検出器において用いるのに適している場合がある、非同期性を示す特徴集合及びそれらの特徴のしきい値のパターンを導出することができる。この経験的解析は、複数の患者からのデータに基づくことができる。例えば、パルツェン窓推定器のような分類器モデルを実現して、適切な特徴集合を特定又は選択することができる。以下は、そのような分類器の実施態様の一例の説明である。
【0058】
分類器モデル:パルツェン窓推定
パルツェン窓推定器を処理装置によって実現して、既知の呼吸非同期性データとともに、上記の特徴のうちのいくつか、又は全ての上位集合のような特徴群を解析することによって、非同期性事象を示す特徴部分集合を評価することができる。例えば、センサ信号から上記の特徴が求められるか、又は抽出された後に、各呼吸は、関連する特徴集合xを有することができる。この特徴ベクトルは、所望の用途によるが、X個までの特徴を有するであろう。そのような分類器において、ωiが第iのクラスを示すものとすると、ベイズの規則による方法を実施して、以下のような事後確率を最大にする所与のテスト特徴ベクトルのためのクラスを見つけることができる。
【数1】
【0059】
カテゴリ毎の事後確率は、パルツェン窓推定によって計算することができる。このノンパラメトリック法の利点は、根底にある密度の形がわかっていることを前提とすることなく用いることができることである。xにおける密度p(x)を推定するために、最初に、特徴空間にわたって一連の領域R1...Rnが作成される。各領域Rnは、d次元の超立方体である。hnが超立方体の辺の長さであるとすると、その体積は以下の式によって与えられる。
【数2】
【0060】
したがって、超立方体knに分類されるサンプルの数は、以下の窓関数によって定義すすことができるようになる。
【数3】
【0061】
ただし、
【数4】
は単位超立方体であり、原点を中心にした単位超立方体の内部で値1を有し、その外部で値0を有する。(2)及び(3)を組み合わせると、n個のトレーニングサンプル及び窓関数を用いるパルツェン窓密度推定値を以下の式によって定義することができる。
【数5】
【0062】
特徴ベクトル間のユークリッド距離の中央値に等しい半径を有するガウス窓関数を用いることができる。
【0063】
推定器が複数のクラスを付された呼吸データに適用される可能性があることに起因して、分類器は、各クラスを別個に、かつ順次に扱うことができるように、二分器として動作することができる。
【0064】
特徴部分集合選択
その処理装置は、分類性能判定基準を最大にする特徴部分集合を特定することができる部分集合選択器としての役割を果たすために、SFFS(Sequential Forward Floating Search)のような逐次選択アルゴリズムの形で実現することができる。例えば、精度判定基準は、既知の分類に基づいて、各部分集合によって正確に分類される呼吸のパーセンテージとして計算することができる。最初に、そのようなアルゴリズムは、通常のSFS(sequential forward selection:逐次前進選択)を用いて、いくつか(例えば、3つ)のパスを形成することができ、3つの特徴が選択されるようにする。これらの評価パスはそれぞれ、既に選択されている特徴の性能しきい値に加えて、最も大きな改善に寄与する特定の特徴を性能に追加する。最適な特徴集合の一部でない特徴の「ネスティング」を避けるために、1つずつ特徴を除去することができ、一連の残りの特徴をシャッフルし直すことができる。その後、改善が得られたかどうか、分類器性能を調べることができる。性能が改善された後にのみ、特徴の新たな組み合わせが選択される。そのような特徴削除段階の後に、SFSアルゴリズムを実行して、新たな特徴を追加することができる。この特徴追加及び削除サイクルは、特定の特徴部分集合の性能が最大にされるまで繰り返される。
【0065】
特徴集合の例
例えば、そのような過程によって設計される検出器100の一実施形態を、無効呼気努力非同期性を検出するための特徴の部分集合を用いて実現することができる。そのような部分集合は、PW線形近似電力、PW距離流最大最小、PW体積偏差、Taui及びPW距離比を含むことができる。呼吸装置センサデータから、これらの特徴のための値を呼吸毎に計算し、対応する1組のしきい値と比較して、1つ又は複数の呼吸における無効呼気努力非同期性事象の存在を検出することができる。付加的な特徴集合例は、本明細書において更に詳細に検討される。
【0066】
実験
上記の方法に基づいて、肺疾患病棟の23人の患者からの5627回の呼吸が調査された。患者は、従来の人工呼吸及び非侵襲的な人工呼吸(NIV)の両方を受けていた。患者は、深刻な呼吸障害から回復した後にNIVを、又はウィーニングの進行した段階において従来の換気を受けていた。被検者毎に、10〜20分の呼吸データが得られた。以下のトレースが得られた。マスクと人工呼吸器のYピースとの間に配置されるか、又はYピースに配置される熱線型呼吸流量計及び差圧変換器を用いて、気道開口時の流れが測定された。呼吸流量計とフェースマスク又は気管内チューブとの間のサイドポートから気道内圧が測定された。バルーンカテーテルシステムを用いて、食道内圧及び胃内圧が測定された。このために、食道の下3分の1に食道バルーンが配置され、0.5mlの空気で満たされ、胃バルーンが1mlの空気で満たされた。閉鎖試験を用いて、バルーンが適切に配置されていることを確認した。経横隔膜圧(Pdi)が、胃内圧(Pga)と食道内圧(Pes)との間の差として計算された。
【0067】
呼吸セグメント化アルゴリズム
各呼吸時期(instance)を自動的に区分するために、処理装置を用いて、データにセグメント化アルゴリズムが適用された。図10に示されるように、プログラムされた状態機械は4つの状態を含み、流れ及び体積信号(図10の「流れ」及び「体積」条件として示される)を解析して、各吸気の開始時点及び終了時点を特定した。この特定は、流れ及び体積条件に基づいて、状態機械が図10に示される「確認済み吸気」状態1010及び「確認済み呼気」状態1020に入ることに対応する。状態図論理の条件において示される、選択された流れしきい値及び体積しきい値は、α=0.05L/s及びβ=150mLである。呼吸を区分する他の方法を実施することもできる。
【0068】
図10に示されるように、確認済み呼気状態1020において開始すると、プログラムされたプロセッサは、流れが0付近の正の値(α)よりも大きくなるのを待った後に、暫定吸気状態1030に進む。その後、0に近い雑音変動を超えて、吸気において信号が確立されたことを示すほど十分に累積された体積(β)を検出した場合にのみ、プロセッサは確認済み吸気状態1010に進む。同様の処理論理が、確認済み吸気状態1010から暫定呼気1040を通って、確認済み呼気状態に移行して戻る場合にも当てはまる。流れ信号のデータに対して、これらの時点を監視することによって、状態機械が確認済み吸気状態及び確認済み呼気状態に入る時点に対応する、各吸気の開始時点及び終了時点が特定される。
【0069】
視覚的な非同期性スコア化
カスタム設計されたグラフィカルユーザインターフェース(Matlab)を用いて、非同期性、及び呼吸区分の正しさの視覚的なスコア化が、人工呼吸を専門とする一人の医師によって実行された。代替的には、自動コンピュータシステムを利用して、非同期性のスコア化を計算することもできる。
【0070】
手動による事象スコア化のためのグラフィカルユーザインターフェース(GUI)の一例が図13において示される。そのインターフェースによれば、一連の呼吸動作の中で個別にありとあらゆる呼吸の容易な視覚的評価を行なうことによって、手動でスコア化できるようになる。そのインターフェースは、その表示に従って信号を分類できるようにし、かつ信号を検索できるようにする。信号のデータを有するデータファイルは、そのインターフェースの右上角にあるボタンを用いて管理することができる。データファイルをロードする際に、インターフェースのプログラムは、データヘッダを変数名としてパースし、それに応じてカラムデータを格納する。セーブされたデータを有するファイルは、以下のように予約される1組の作業領域変数を含むことができる。
CompFlow:
オフセット及び漏れを補償された患者流れデータ
Pao:
気道における圧力
Pdi:
経横隔膜圧
Ppl:
胸腔内圧
Pab:
腹圧
Inspirations:
呼吸毎の吸気の開始を区分する一連の指標
Expirations:
呼吸毎の呼気の開始(したがって、吸気の終了)を区分する一連の指標
AsynchronyClass:
非同期性が存在する場合には、その非同期性のタイプを指示する、各呼吸に指定される一連のラベル
Fs:
デフォルトで100Hzである、データのサンプリングレート
Filename:
固有ファイル識別子
【0071】
そのインターフェースの例では、上から下に向かって、5つのプロットを用いて、患者流(Flow)、気道内圧力(Pressure-airway)、経横隔膜圧(Pressure-transdiaphragmatic)、胸腔内圧(Pressure-pleural)及び腹圧(Pressure-abdominal)を含む、時系列データを表示する。必要な場合には、流れを反転(Invert)できるようにするために、制御ボタンを含めることができる。
【0072】
そのデータの時間スケール(Time Scale)は、パネルの左下角にあるボタン群によって調整することができる。例えば、そのスケールを短くすると、表示される秒範囲を半分にすることができ、逆にスケールを長くすると、その範囲を二倍にすることができる。データの検索は、そのインターフェースをプログラムされたコンピュータのキーボードの上下矢印キーによって設定された時間スケールに従って画面を前後にめくることによって達成される。データトレース上に、本明細書において更に詳細に検討されるような自動呼吸検出アルゴリズムによって区分されるような、呼吸毎の吸気及び呼気両方の開始を指示するマーカーを表示することができる。1つの呼吸を選択することができ、その際、各トレースの対応する部分が常にハイライトされる。呼吸は、左及び右矢印キーを用いて順次に行き来することによって、又は数値情報(呼吸数又は呼吸が生じる時点)をパネルの右下角にある最初の2つのユーザ入力欄に入力することによって選択することができる。1つの呼吸の場合に表示される呼気開始は、最後のユーザ入力欄内にミリ秒単位のオフセットを入力することによって調整することができる。
【0073】
インターフェースの右下パネルは、単一の呼吸の更に詳細なグラフを示しており、患者流、気道内圧及び経横隔膜圧が共通のグラフ軸上に重ねられる。圧力スケールは左軸上に与えられ、流れは右軸上に与えられる。これにより、採点者が信号のタイミング細部を、より高い解像度で視認できるようになる。
【0074】
最後に、右上パネルは、チェック欄によって呼吸のカテゴリ化に関するユーザ入力を受信し、格納するための役割を果たす。一度に2つ以上のカテゴリがチェックされてもよい。選択するために利用可能なカテゴリ及びそれらの定義判定基準は、以下のものを含むことができる。
正常トリガー(Normal Trigger):
人工呼吸器のトリガーが患者の努力の開始に対して適切に調整される。
正常吸気(Normal Insp):
吸気中に人工呼吸器と患者との間の相互作用の調和が取れている。
正常サイクル(Normal Cycle):
人工呼吸器の循環が患者の努力の終了に対して適切に調整される。
正常呼気(Normal Exp):
呼気中に人工呼吸器と患者との間の相互作用の調和が取れている。
無効吸気努力(Insp. Ineffective Effort):
人工呼吸器がトリガーされた後に換気に伴うPdiの正の振れが開始し、吸気支援を送達しつつあり、結果として流れトレース内の振れが増加する。
無効呼気努力(Exp. Ineffective Effort):
呼気中に換気に伴うPdiの正の振れが生じたが、その後に、人工呼吸器からの吸気支援がなかった。
無効複数努力(Multiple Ineffective Efforts):
呼気中に換気に伴うPdiの2つ以上の正の振れが生じるが、その後に、人工呼吸器からの吸気支援はない。
後期循環(Late Cycling):
呼気中にPdiにおいて換気に伴う正の振れが生じるが、その後、150msよりも長い時間が経過するまで、人工呼吸器からの吸気圧支援がない。そのPdi増加は、患者努力の開始が、デバイスが圧力支援を送達してから150msよりも長い時間が経過したことを示す。
後期トリガー(Late Trigger):
患者の吸気努力の終了を過ぎて人工呼吸器の吸気時間が延長される。例えば、Tiexcessが患者努力の終了を過ぎて人工呼吸器の吸気時間の延長であり、Tipatが、患者吸気努力の持続時間である場合、時間Tiexcessが時間Tipatの半分よりも長い(Tiexcess>Tipat/2)ときに、後期トリガーが存在するとみなすことができる。
早期循環(Early Cycling):
患者の換気に伴うPdiの振れの終了前に人工呼吸器による吸気支援が終了し、それは患者の努力がデバイスの人工呼吸を過ぎて延長されることを示す。
自動トリガー(Auto-trigger):
呼吸治療装置又は人工呼吸器によって吸気支援が送達されるが、それに付随してPdiの振れは生じない。振れがあれば患者努力を示すことになったであろう。これは、患者によってトリガーされなかった呼吸をデバイスが送達したことを指示するとみなすことができる。
ダブルトリガー(Double Trigger):
換気に伴うPdiの一度の振れにわたって2度の人工呼吸が送達される。第1のサイクルは、患者によってトリガーされ、非常に短い呼気時間だけ第2のサイクルから分離され、その時間は、先行する正常な呼吸の平均吸気時間の約半分未満であると定義することができる。
咳(Cough):
患者が咳をしており、これは腹部努力による呼気内の大きな負のスパイクによって示される。
気道閉塞(Airway Obstruction):
上気道が概ね閉塞される。それは、患者努力に付随して流れが平坦であるか、若しくは流れが生じないことによって示されるか、又は主に呼気において生じる嚥下動作中に短時間だけ示される。
時限呼吸(Timed Breath):
人工呼吸器によってトリガーされる強制的な呼吸。
破棄(Discard):
データが破損しており、使用するのに適していない。
不明(Dont know):
事象/活動が曖昧であり、精査する必要がある。
【0075】
視覚的なスコア化を実行するように指定された医師は患者の臨床データに目を通さず、その治療にも従事していなかった。
【0076】
吸気の開始は、患者努力の開始に対応するPdiの振れと協調するように、患者毎に200ms(±50ms)だけ全体的に調整された。その後、無効呼気努力事象、ポストトリガー努力事象、ダブルトリガー事象、自動トリガー事象、後期トリガー事象、早期循環事象、後期循環事象及び無効吸気努力事象を含む、先に特定された非同期性事象のカテゴリ及び定義によって、各呼吸が正常又は非同期性のいずれかにラベル付けされる。
【0077】
全部で5627回の呼吸を解析し、以下の表IIにおいて要約されるようにラベル付けを行った。
【0078】
【表2】
【0079】
この実験の目的は、非侵襲的なセンサを用いて非同期性の検出を自動化することであったので、検出特徴の上位集合が、経横隔膜圧信号を用いてではなく、流れ信号及び圧力信号のみを用いて導出された。したがって、プログラムされた処理装置は、流れ信号及び圧力信号からのデータに基づいて呼吸毎に特徴を導出した。導出された特徴は、上記の表Iにおいて先に要約された特徴であった。
【0080】
パルツェン窓推定器及び特徴部分集合選択器
その後、その特徴データは、上記のようなプログラムされたパルツェン窓推定器及び特徴部分集合選択器を有する処理装置に適用された。試験時に、データを解析して、無効努力非同期性事象分類器のための特徴集合を作成した。残りの非同期性事象のための付加的な特徴集合も同じように作成することができる。
【0081】
クロス−フォールド(cross-fold)検証器
作成された非同期性分類器の結果を評価するために、クロス−フォールド検証が適用された。このために、一人を除く全ての患者からの特徴の上位集合が、検出器/分類器を作成するためのトレーニングデータを形成した。その後、特徴の部分集合を用いる分類器を、除外された患者の対応する特徴データに関して試験した。この過程を、全ての患者に対して23回繰り返し、それにより、一人の患者をトレーニングデータから除外し、各繰返しにおいて自動非同期性検出システムを試験するために確保した。言い換えると、この場合、より大きな患者のグループからのデータを用いて自動的に作成された分類器を用いて、除外された患者のデータからの非同期性事象を自動的に検出した。その後、検出器/分類器の性能を全体的に推定するために、全23パスにわたって、精度、感度、特異度、陽性予測度及び陰性予測度の値、及びコーエンのカッパ(Cohen’s kappa)係数を平均した。
【0082】
試験結果
以下の表IIIは、無効努力非同期性事象を検出するために作成された特徴集合を用いて、自動非同期性検出器によって行なわれた検出のための陽性予測度、陰性予測度、感度及び特異度結果を含む。検出器の性能を、5627回の呼吸の場合に手動で注釈されたデータと比較した。また、各パラメータが計算可能であった記録の数Nも示す。その検出器例の場合に選択した特徴集合は、順番に、1.PW線形近似電力;2.PW距離流最大最小;3.PW体積偏差;4.Taui;5.PW距離比であった。
【0083】
【表3】
【0084】
実験評価
23人の被検者のデータベースを用いて、患者−人工呼吸器相互作用における非同期性の主な形態を検出するための非侵襲的方法を設計し、専門家に基づく分類システムと比較した。
【0085】
無効呼気努力を分類する場合、検出器/分類器の全体精度及び特異度は高いのに対して、感度は普通である。感度が低い原因として考えられるには、時限圧力支援呼吸がデータ間で共通であったという事実に関連する。これらの呼吸を含むそのようなモードでは、人工呼吸器は患者によって加えられる正常な努力を無視することが意図されており、メトロノームのようにタイミングを指示することが好ましい。結果として、正常なサイズの努力は、圧力支援を伴わない正常な正の振れを引き起こす流れ信号に影響を及ぼす場合がある。これらの努力は、依然として無効と分類されるが、病理的な異種ではなく、圧支援換気に関して医師が患者に対して抱く主な懸念を占める固有PEEP及び過膨張によって大きく影響される。病理学的な無効努力は、時限モードによって引き起こされる無効努力と比べてより小さな負の値の流れの振れを伴って生じる。したがって、合成された特徴ベクトルは、他の呼吸クラスの、より大きな割合を横切る。このクラスを2つの部分集合としてラベル付けし直すことによって、分類器の感度を改善することができる。
【0086】
分類器の感度に影響を及ぼす別の要因は、呼気努力と早期循環との間の類似の形態である:いずれも呼気中の流れ信号上の(それに応じて圧力上の)単一の摂動によって分類されるが、それらが呼気の開始から生じる時間間隔によって区別されるだけである。この間隔は被検者によるので、専門家が目視で調べる場合であっても曖昧な場合がある。
【0087】
分類器特異度を制限する要因は、咳、嚥下及び腹部努力のような人為現象、並びにPdi信号に雑音がある場合、大きなドリフトを示す場合、又は食道痙攣が生じる場合に人が間違えること、及び曖昧であることによってもたらされる正しくない呼吸ラべル付けを含む。
【0088】
形態的特徴と同様に、SFFSアルゴリズムによって顕著な特徴として吸気時定数Tauiが選択されたことに留意するのが興味深い。この生理的パラメータを、主に過膨張を伴う閉塞性患者において生じる無効努力の機構に関連付けることは興味深い。その際、高い吸気時定数を有する患者が、より多くの数の無効努力を示すと予想することができる。
【0089】
要するに、パターン分類手法を用いて非同期性の検出を自動化することは実現可能であり、患者人工呼吸器相互作用の品質を評価する際に臨床的に有用とすることができる。
【0090】
無効呼気努力に関連する特徴集合の例
検出器のいくつかの実施形態において、1つ又は複数の特定の非同期性事象の場合に、特徴集合を具体的に考案することができる。例えば、多くの場合に、非同期性は、圧力信号及び流れ信号上の不規則性又は摂動によって特徴付けられる。具体的には、無効呼気努力事象(eIEs)に関して、これらの不規則性は呼気中に生じる。これらの不規則性の信号対雑音比は、一般的に、圧力信号上よりも流れ信号上で高いので、特徴集合を導出するための主要信号として流れを用いることができる。このために、約0.1秒の時定数を有するセグメント化移動平均フィルタを呼吸相毎に別個に流れ信号に適用することができる。呼気中の不規則性を特定するために、呼吸の呼気形状の、より「正常な」予測される軌跡からの流れ曲線の著しい偏差を導出することができる。呼気によって予測されるこの軌跡をΘと呼ぶ。予測される軌跡を用いて、以下のような減算によって、フィルタリングされた流れ信号
【数6】
をトレンド除去することができる。
【数7】
それにより、結果として生成される信号Φは、非同期性を表すことができる任意の不規則な偏差を際立たせるようになった。特徴をΦに関する更なる演算から導出した。
【0091】
呼気信号によって予測される軌跡Θは、以下のような2つの方法例のうちの一方によって導出することができる。最初に、いずれの方法の場合にも、呼気の最初の25%において生じる最大呼気流の場所を得た。この場所まで、Θはフィルタリングされた流れに等価であった。その後、Θの残り部分が、以下の方法のうちの1つによって計算することができる。
【0092】
(1)極小値補間法
フィルタリングされた流れ信号から500msの間隔において極小値を得ることができる。最大呼気流と呼気の終了との間でこれらの極小値から補間することによって、Θintを導出することができる。図14は、無効呼気努力を含む呼気サンプルに適用される方法を示す。この図において、フィルタリングされた呼気流データ
【数8】
は無効呼気努力を含む。予測される正常な軌跡Θintを導出することは、ピーク呼気流後に生じるデータの500ms間隔において極小値を見つけること、及び極小値間を補間して、元の軌跡よりも滑らかな軌跡を導出することを含む。
【数9】
からΘintを減算することによって得られる信号Φintは、無効努力をハイライト又は指示する。
【0093】
(2)区分的双線形当てはめ法
最大呼気流の位置以降の呼気流データの残り部分に対して、区分的双線形近似を実行することができる。この手順は、a−15及びb−15として示される2つの線形部分に対するデータの最小二乗当てはめを含むことができ、それらの部分は場所kにおいてL字曲がり(elbow)又は折れ点によって連続するように連結することができる。最も良好であり、かつ最も適切な当てはめを提供できるようにするために折れ点が必要とされる場所を判定するために、最初のサンプルから、そのデータの長さの3分の1に等しいサンプルまで順次に、kの値を試験することができる。試験条件は、データと当てはめられた値との間の差の二乗平均平方根とすることができ、最小条件値を返すkを選択することができる。kの場所は呼気の最初の3分の1に限定することができる。なぜなら、典型的な呼気プロファイルは、この名目的な期間内で最も際立ってその曲率を変更するためである。さらに、無効努力は、呼気のその後の3分の2の間に最も一般的に生じる傾向があった。Φpwの計算において無効努力を際立たせるために、無効努力の特徴に関連する領域の周囲において高い分散を有する線形当てはめが望ましかった。kの配置に関して制限が加えられなかった場合には、無効努力を含む呼気に対して、最も良いkが無効努力の形態自体の中に位置することになり、それゆえ、それを増強するのに、その手順は不十分になるであろう。信号Θpwは、第2の線形成分b−15とのその最初の交差部分までのフィルタリングされた流れと、この交差部分を越えるb−15の残りの部分とを連結することによって導出することができる。図15は、図14に示されるのと同じサンプルに適用される方法を示す。したがって、図15では、フィルタリングされた呼気流データ
【数10】
は、無効呼気努力を含む。予測される正常な軌跡Θpwの導出は、区分的双線形関数(折れ点kにおいて接合される部分a−15及びb−15)を最大呼気ピークの位置以降のデータに当てはめること、及びその交差部分(上向き矢印1550によって指示される)において第2の線形成分をフィルタリングされた流れに連結することを伴うことができる。
【数11】
からΘpwを減算することによって得ることができる信号Φpwは、無効努力をハイライト又は指示する。
【0094】
これらのトレースを用いて特徴集合を導出するために、信号のデータを用いて、Θpw上に基準点を配置することができる。図16に例が示されており、図16はトレンドを除去された流れ、Θintを示しており、d−16、e−16、f−16及びg−16として図16上に示される基準点を付されている。それらの点は以下のものを含むことができる。
d−16:[dx,dy]、最大値の直前に生じる正の勾配を有するゼロ交差;
e−16:[ex,ey]、最大値;
f−16:[fx,fy]、最大値の直後に生じ、最小値の直前においても生じる負の勾配を有するゼロ交差;及び
g−16:[gx,gy]、最小値。
【0095】
これらの基準点は、フィルタリングされた流れ
【数12】
のデータにマッピングすることができ、その完全な基準点集合に寄与する。これが図17に示されており、図17は、フィルタリングされた流れ
【数13】
を示しており、c−17、d’−17、e’−17、f’−17及びg’−17としてラベル付けされる基準点を付されている。これらの点は以下のものとみなすことができる。
c−17:[cx,cy]、フィルタリングされた流れ
【数14】
上のピーク呼気流
d’−17:[dx,d’y]、無効努力の開始
e’−17:[ex,e’y]、無効努力のピーク値
g’−17:[gx,g’y]、無効努力の完了
【0096】
その後、以下の特徴のうちの1つ又は複数をΦpw及びΦintから導出することができ、起こり得る場合が図16及び図17に示される。
電力Φpw:
この特徴は、以下の式によって与えられるΦintの電力(RMS)とみなすことができる。
【数15】
ただし、iはサンプル番号であり、nは信号内のサンプル数である。
電力(2/3)Φint:
この特徴は、Φintの最後の3分の2の電力(RMS)とみなすことができる。
電力Φpw:
この特徴はΦpwの電力(RMS)とみなすことができる。
積分Φpw:
この特徴は、等価な整流後のΦpwの積分とみなすことができる。
勾配−a:
この特徴は、第1の線形に当てはめられた部分、a−15の勾配とみなすことができる。
勾配−b:
この特徴は、第2の線形に当てはめられた部分、b−15の勾配とみなすことができる。
振幅p−tΦpw:
この特徴は、Φpwの最大値と最小値との間の垂直距離ey−gyとみなすことができる。
持続時間p−tΦpw:
この特徴は、Φpwの最大値と最小値との間の水平距離gx−exとみなすことができる。
volIE:
この特徴は、無効努力中に動かされる空気の体積とみなすことができる。これは、曲線d−16→e−16→f−16下の正の面積と、d−16→f−16→g−16→d−16によって囲まれる面積の絶対値とを加算することによって、又は線d’−17→g’−17に対して弧d’−17→e’−17→g’−17を積分することによって計算することができる。
zxUpCount:
この特徴は、正の傾きを有する、Φpwのゼロ交差の数とみなすことができる。
maxFlowIE:
この特徴は、無効努力において達する最大流れの値e’yとみなすことができる。
heightIE:
この特徴は、指標e’y及びg’yに対応する、
【数16】
の値間の垂直距離とみなすことができる。
durIE:
この特徴は、無効努力の持続時間gx−dxとみなすことができる。
rangeP−P:
この特徴は、呼気における最大呼気ピークと無効努力における極大値との間の垂直距離e’y−cyとみなすことができる。
durP−P:
この特徴は、呼気における最大呼気ピークと無効努力における極大値との間の水平距離ex−cxとみなすことができる。
ampRatio:
この特徴は、heightIEとrangeP−Pとの比とみなすことができる。
volRatio:
この特徴は、無効努力中に動かされる空気の体積volIEと、全呼気体積volEとの比とみなすことができる。
durRatio:
この特徴は、無効努力持続時間durIEと呼気の長さTeとの比とみなすことができる。
locationIE:
この特徴は、exと呼気の長さTeとの比として計算される呼気の無効努力の場所とみなすことができる。
【0097】
上記の呼気流形態に基づく特徴の特徴集合又は部分集合は、元の形及び正規化された形の両方において用いることができる。値を患者毎のモード値で割ることができるように正規化を実行することができる。先に検討されたような試験では、患者のための呼吸の大部分は「正常」である(非同期性を伴わない)ので、所与の特徴のモード値、又は最も頻繁に発生する値は正常なパターンを有する呼吸を表すと仮定することができる。正規化過程は、被検者間の変動を低減することを意図している。患者毎の特徴集合が導出されると、特徴毎の値の範囲及び対応するヒストグラムを計算することができる。特徴値は、その範囲の約5%に等しいビン幅に基づいてビン番号を割り当てることができる。その後、最も密度の高いビン番号にビン幅を乗算して、最小特徴値に加算した値として、特徴モード値を計算することができる。したがって、先に検討された他の特徴と同様に、その後、いくつかの実施形態では、複数の患者から求められた各特徴に対する特徴モード値を、検出器によって計算される特定の特徴と比べるときに非同期性事象を検出するためのしきい値として実現することができる。しかしながら、いくつかの実施形態では、各特徴に対する特徴モード値は、一人の特定の患者の過去のデータに対して具体的に求められ、今後の検出のためにその特定の患者とともに利用することができる。
【0098】
上記の検討から明らかになるように、本明細書において記述される種々のタイプの非同期性事象のような、呼吸事象の検出は、信号形態(例えば、流れ及び/又は圧力信号形態)から導出される1つ又は複数の特徴に基づくことができる。事象のための特徴のこの判定は、基準点、それに関連付けられる距離、その間の比又は他の関係を特定することを含むこともできる。基準点の自動特定は、当初に捕捉された生理的信号又は任意の中間的な信号のゼロ交差、極大値及び極小値を見つけること等の、種々の演算を含むことができる。中間的な信号は、MLRによって、又は一次関数、二次関数、指数関数、正弦関数、台形関数又は三角関数、或いは上記の関数の任意の区分的組み合わせのような他の関数によって、データを数学的に当てはめることによって、(流れ又は圧力等の)元の信号から導出することができる。区分的関数の構成は、当てはめの最小誤差を有する折れ点を位置特定しようと試みる最適化ルーチンの実施を含むことができる。中間的な信号は、更に、1つ又は複数の他の中間的な信号に関する演算(例えば、減算、重ね合わせ、デサンプリング、補間)から導出することができる。そのような過程において、基準点は、以下の例:(a)プラトー圧を超える前の圧力信号上の変曲点;(b)吸気ピーク後、かつ吸気の終了前の流れ信号上の傾きの最大変化を示す変曲点;(c)呼気終了時で、かつトリガー直前における圧力上の負の傾きの最大変化を示す変曲点;(d)トリガー直前の最小圧;(e)吸気ピークまでの吸気中の流れ信号上の正の傾きの最大変化を示す変曲点;及び/又は(f)データに当てはめられる区分的関数間の折れ点のうちの1つ又は複数とすることができる。
【0099】
ダブルトリガーに関連する特徴集合の例
ダブルトリガーを特徴付けるのは、圧力信号上に「うさぎの耳(rabbit-ears)」パターンを形成するための迅速な再トリガーである。このパターンは、適切な検出器によって用いるための特徴集合を考案するために考慮に入れることができる。この関連で、流れ信号は一般的に「うさぎの耳」パターンに従うことになり、吸気の遅れを示すギザギザのプロファイルを有し、そのプロファイルは呼吸全体にわたって正のままであるか、又は短時間だけ呼気に入る場合があり(誤った呼気)、その後、再トリガーに付随する吸気に戻る(図5を参照)。呼吸フレーマ(breath framer)は、このパターンを単一の吸気に関連すると認識することが望ましい。しかしながら、その流れが加圧間で負になり、その対応する体積が約150mLよりも大きい場合には、2つの呼吸がセグメント化される可能性がある。
【0100】
これらのパターンに基づいて、以下の形態的特徴を考案することができ、そのうちのいくつかが図18に示される。その図は、ダブルトリガーを伴う呼吸の流れ信号及び圧力信号を示す。有意なピーク及びトラフが画定されており、以下に記述される「peaksCount」、「falseExp」及び「timeElapsed」の特徴が示される。
【0101】
peaksCount:
この特徴は、約5cmH2Oよりも大きな有意な最小値によって分離される有意な最大値の数とみなすことができる。シミュレートされたリアルタイムのピーク−トラフ発見アルゴリズムが以下に説明される。f(x)が信号を表し、xがデータであるとすると、各xに関して、以下の動作が行われる。
1.f(x)>Tmaxである場合には、Tmax=f(x)とする。Tmaxは現在の一時的な最大値であり、保持変数としての役割を果たす。
2.f(x)<Tminである場合には、Tmin=f(x)とする。Tminは現在の一時的な最小値であり、保持変数としての役割を果たす。
(ステップ(1)及び(2)は、雑音の周囲で振動する場合がある。TminとTmaxとの間の有意な差が明らかになるまで、Lmax及びLmin、すなわち、極大値及び極小値は確認されない。)
3.Tmax−Tmin>5cmH2Oである場合には、Lmax=Tmax及びLmin=Tminを設定する。
4.ピークから降下し始めており、かつf(x)がLmaxとLminとの間の範囲の75%未満である場合には、降下フラグを設定し、上昇フラグを無効にし、一時的変数をリセットして、新たな1組のLmax及びLmin値の記憶を確認する。
5.トラフから上昇し始めており、かつf(x)が最新のLmaxとLminとの間の中間点よりも大きい場合には、上昇フラグを設定し、降下フラグを無効にして、Lmin=Tmin及びTmax=f(x)を設定する。
6.次のデータで繰り返す。
【0102】
timeElapsed:
この特徴は、有意な最大値間で経過した時間とみなすことができる。
【0103】
falseExpVol:
この特徴は、吸気中に生じる全呼気体積とみなすことができる。これは、ほとんどの場合に0mLよりも大きくなるが、誤った呼気を含む、ダブルトリガーの場合に150mL未満になると考えられる。
【0104】
expRatio:
この特徴は、現在の呼気時間と、先行する2分間にわたって計算される平均呼気時間との比とみなすことができる。誤った呼気体積が150mLよりも大きい場合があり、呼吸フレーマがその呼吸を誤って分割することも稀に生じる場合がある。この場合、採点者は、最初の呼吸をダブルトリガーと分類するように指示された。この場合、誤った呼気体積は、吐出される平均体積に比べて小さくなることが予想され、正常な呼吸とダブルトリガー呼吸とを分離する超平面に寄与する。
【0105】
したがって、これらのダブルトリガーに関連する特徴のうちの1つ又は複数は、特定の患者の場合に自動検出プロセッサによって計算することもできるし、判定することもでき、適切な1つ又は複数のしきい値に対して評価されて、ダブルトリガー事象が生じたか否かを判断することができる。
【0106】
呼吸機構に基づく特徴の判定
上記のように、特徴集合又は部分集合は、呼吸機構に基づく特徴を含むことができる。いくつかの実施形態では、これらの特徴は、検出器100のプロセッサによって自動的に判定することができる。この関連で、上記のような特徴集合の場合の抵抗R及びコンプライアンスC値の自動判定を、多重線形回帰法によって計算することができる。
【0107】
検出器によって処理するためのそのようなアルゴリズムのための基礎は、患者−人工呼吸器システムのモデルに対して数値データの多重線形回帰(MLR)を適用することに頼ることができる。多重線形回帰は単線形回帰を延長し、単一の応答変数と、1組の2つ以上の説明変数との間の関係を記述するために用いられる。その関係は線形であり、その基本形において、以下のように表記することができる。
【数17】
ただし、ランダム誤差εi、i=1、2、...、nは、平均が0で、一定の分散σ2を有する正規分布の確率変数である。
【0108】
患者−人工呼吸器システムは、全駆動圧がシステムの弾性と抵抗性との和であるような単一の区画としてモデル化することができる。これは、一次微分方程式によって記述することができる。
【数18】
ただし、Ptotは駆動圧であり、
【数19】
は気道内の流れであり、Vは変位する体積であり、Rは気道抵抗であり、Cは呼吸器系のコンプライアンスであり、P0は呼気終末における圧力であり、それは患者の適用される外部PEEPと内部PEEPとの和である。駆動圧を単一の応答変数と定義し、流れ及び体積を説明変数と定義することによって、プロセッサは、測定されたデータにMLRを適用して、パラメータR及びCを求めることができる。
【0109】
システム内の雑音は主に、乱流及び人工呼吸器タービンによってランダムに生成される。人工呼吸器タービンは確定的で周期定常的な成分も生成し、それらの成分はモデルの結果に影響を及ぼす場合がある。しかしながら、対象となる周波数範囲(例えば、<10Hz)内で、それらの成分は相対的に微々たるものであるとみなされる。したがって、モデル内の誤差εは、システム雑音の大部分の場合に良好な近似である。
【0110】
しかしながら、患者の筋努力は、モデルの精度にとって有意な係わり合いがある場合がある非ランダム雑音源の一例である。人工呼吸器を用いて自発的に呼吸する患者の場合、任意の時点における駆動圧は、人工呼吸器(PV)及び患者の呼吸筋(Pmus)の両方によって生成される。
【数20】
【0111】
Pmusは、食道バルーンカテーテルを用いなければ、直接測定することはできないので、患者の筋肉が活動している間に、機械的なパラメータを非侵襲的に正確に求めることは難しい。これは主に横隔膜及び副筋が収縮する吸気中の問題である。筋活動を考慮することなく、流れ及び体積データを吸気中に人工呼吸器圧力データに当てはめることは、抵抗を過小評価し、コンプライアンスを過大評価することになる。
【数21】
【0112】
MLR過程においてプロセッサによって実施することができるこの手法によれば、患者努力からの影響を除外することを可能にすることができ、そうでなければR及びCの精度の妨げになっている。
【0113】
非ランダムシステム雑音の別の例は、心拍帯域幅(1〜2Hz)において現れる心原性振動である。通常、心原性振動は、人工呼吸を施される患者の圧力及び流れに対して低い振幅の信号を生成するので、モデルに及ぼす影響は限られる。
【0114】
これらの過程の場合に、吸気と呼気との間の区別は、本明細書において更に詳細に説明される状態機械に基づくことができ、その状態機械は4つの状態:暫定吸気(PI)、確認済み吸気(CI)、暫定呼気(PE)、確認済み呼気(CE)を含む。したがって、呼気データは、確認済み呼気に先行する暫定呼気の開始から、確認済み吸気に先行する次の暫定吸気の開始まで(その暫定吸気は含まない)生じるデータとみなすことができる。
【0115】
各呼吸において回帰のために用いられるデータは、呼気の開始から、一回換気量の約85%〜95%(より好ましくは90%)が吐出される時点までを含むことができる。したがって、いくつかの実施形態では、呼吸サイクル(例えば、呼気部分に起因すると考えられるか、又は呼気部分に対応する圧力、流れ及び尺度)の一部(例えば、呼気部分)のみを、呼気の最初の時点から、吐出される一回換気量の所望の限度(例えば、85パーセント〜90パーセントの範囲)に達した時点まで評価することができる。この理由の1つは、データ内の動的な挙動を最適に捕捉することである場合がある。このモデルにデータを当てはめる意図は、圧力源の影響を受ける受動システムの動態を記述することである。したがって、計算は、患者呼吸筋活動に関連付けることができるデータを除外することができる。圧力の最低限の変化を伴う呼気終末において遅い流れが生じる場合、信号対雑音比が増加することによって、パラメータ推定が不正確になる可能性があるので、データのこの部分を計算から省くことができる。
【0116】
良好な当てはめにとって望ましいことは、流れ波形が指数関数的減衰に従うように、呼気努力又は他の誤った人為現象を伴わない呼気を達成することである。したがって、当てはめアルゴリズムとの関与から人為的な呼吸を除外することが望ましい場合がある。したがって、いくつかの実施形態において、抵抗及びコンプライアンスの判定の精度評価を実施することができる。これを果たすための1つの方法は、最後の数(例えば、約15)の呼吸からの当てはめられた機構パラメータの中央値が、より規則的な指数関数的減衰を有する呼気を表すと解釈できるように、約15の幅を有するフィルタのようなメジアンフィルタを実現することとすることができる。また、統計的当てはめからの決定係数R2値を、当てはめ不良の呼吸を除去するための判定基準として用いることができる。例えば、約0.8のしきい値を用いることができる。したがって、そのような例では、抵抗及びコンプライアンスの特定の判定(例えば、係数がしきい値未満であるという判定)を無視できるように、装置のプロセッサが、コンプライアンス及び抵抗値のMLR判定毎に決定係数R2値を求め、その値を精度しきい値に対して比較すること等によって、精度を判定することができる。
【0117】
抵抗及びコンプライアンス値の上記の判定は、本明細書において検討される非同期性検出方法の一部として実施することができるが、それらの値は他の目的を果たすために求められ、記録することもできる。したがって、本技術の処理デバイス又は呼吸治療装置は、例えば、呼吸毎にこれらの値を計算し、時間の経過とともにこのデータを記録することができる。それらの値は、複数の呼吸にわたって、又は所望の時間期間(例えば、1時間又は1つの治療セッション)にわたって、又は呼吸治療装置による複数の治療セッションにわたって平均することもできる。それらの値は、抵抗及びコンプライアンス値の傾向を評価できるように、出力することができる(例えば、別の処理装置に対して、ディスプレイに対して、かつ/又はメモリ記憶装置に対して)。本明細書において検討される制御実施態様に加えて、それらの値は、呼吸治療装置の制御パラメータに対して自動調整を行なうための付加的な基礎としての役割を果たすこともできる。例えば、それらの値は、患者を治療するための呼吸治療デバイスの圧力設定(例えば、圧力支援(PS)及び/又はPEEP)の自動又は手動滴定のために用いることができる。この関連で、それらの値は、呼吸治療装置の呼気終末陽圧(PEEP)及び/又は圧力支援の制御パラメータを決定し、変更し、かつ/又は設定する自動アルゴリズムのための基礎としての役割を果たすことができる。
【0118】
そのような実施形態の一例において、PEEP制御パラメータの自動滴定は、コンプライアンス値のような、呼吸機構の上記の推定とともに実施することができる。コンプライアンスは、臨床業務において診断援助として一般的に用いられる圧力−体積(PV)曲線の勾配を表す。PV曲線はS字形状であり、下側及び上側変曲点を越える曲線の下限及び上限において低いコンプライアンスが生じる。最適な人工呼吸方式、詳細にはPEEP及びPSの滴定は、PV曲線の中央の線形部分を利用するであろう。
【0119】
PEEPの自動滴定の実施形態の一例では、以下のようなPEEP滴定方法を用いて、滴定装置(例えば、自動滴定呼吸治療装置)のプロセッサが実現することができる。
1.圧力支援PSを更に用いることなく、肺胞の最大の漸増を確保するために、より高い値(例えば、10cmH2O〜15cmH2O)において、呼吸治療装置のPEEP制御パラメータが初期化される。
2.その後、PEEPパラメータがデクリメントされ(例えば、呼吸毎に)、コンプライアンスが求められる1つ又は複数の呼吸の関連するそのPEEPパラメータに対して、対応するコンプライアンス値がステップ毎に求められるか、又は監視される。
3.結果として生成されるコンプライアンスの傾向を用いて、著しい減少を示す変曲点が位置特定される。
4.適切なPEEPパラメータが、例えば、変曲点に対応する圧力レベルよりも1インクリメント分高い圧力レベルとして選択される。この変曲点は、図19のグラフにおいて、矢印a−19で示される。
【0120】
圧力支援PSのための最大限度の自動滴定の実施形態の一例では、滴定装置(例えば、自動滴定呼吸治療装置)のプロセッサはまた、以下のような方法を用いて実現することができ、その方法はオプションで先行するPEEP滴定法に従うことができる。
1.PSを更に用いることなく、肺胞の最大の漸増を確保するために、より高い値(例えば、10cmH2O〜15cmH2O)において、PEEP制御パラメータが初期化される。
2.その後、各ステップにおいて監視されるコンプライアンスにおいて著しい降下が観測されるまで、PEEPパラメータがインクリメントされる(例えば、呼吸毎)。
3.変曲点に対応する圧力レベルよりも1インクリメント分低い圧力レベルのような、適切な最大PS限度が選択される。これも、図19において、矢印b−19において示される変曲点で示される。
【0121】
技術的な実施形態の例
本技術のいくつかの実施形態では、人工呼吸器−患者非同期性事象の一般的な発生だけでなく、図3〜図9において例示された非同期性事象のうちの2つ以上のような異なるタイプの非同期性事象を検出するために、自動方法が実施される。複数の異なる非同期性事象のこの検出は、人工呼吸器又は他の呼吸治療デバイスによる換気補助の送達中に、適切なセンサによって測定される流れ信号及び/又は圧力信号からのデータの自動処理によって実施することができる。例えば、異なる事象の検出は、例えば、呼吸数に基づく特徴、体積に基づく特徴、呼吸機構に基づく特徴、呼気流形態に基づく特徴、電力に基づく特徴、又は本明細書において参照される他の特徴等を含む、圧力及び/又は流れデータによって導出可能である1組の検出変数を予め決定することに基づくことができる。例えば、そのような検出変数は、以下の検出変数例:RR呼吸、RR比、IE比、VolI、VolE、breathLeak、Vol比、PEEPii、Ri、Ci、Taui、PEEPie、Re、Ce、Taue、InterpMinima、InterpMinima−2/3、PW線形近似電力、PW体積偏差、PW距離流最大最小、PW距離比、電力Φint、電力(2/3)Φint、電力Φpw、積分Φpw、勾配−a、勾配−b、振幅p−tΦpw、持続時間p−tΦpw、volIE、zxUpCount、maxFlowIE、heightIE、durIE、rangeP−P、durP−P、ampRatio、volRatio、durRatio、locationIE,peaksCount、timeElapsed、falseExpVol、及び/又はexpRatioのうちのいずれか1つ又は複数とすることができる。
【0122】
1組の変数は、先に説明されたようなオプションの特徴部分集合選択過程に従って選択することができる。検出変数の選択された部分集合を、1つ又は複数のしきい値又はしきい値関数と比較して、それらの変数を用いて事象条件を検出することができる。選択された変数のためのしきい値は、本明細書において検討されるような、観測された事象の経験的/臨床的分類に従って、適切な自動分類判定基準によって判定又は最適化することができる。さらに、変数の評価及び事象条件の検出は、自動呼吸相検出(例えば、先に示された状態図を実施したものによる、吸気相又は呼気相の検出)に更に基づくことができる。
【0123】
その1組の変数を評価することによって異なるタイプの非同期性を検出するための自動処理は、予め記録された流れ及び/又は圧力データを用いる処理装置(例えば、メモリ及び1つ又は複数のプロセッサを有するプログラムされた汎用コンピュータ、又は専用コンピュータ)によって、又はそのような尺度が求められている間に治療中の人工呼吸器によって実行することができる。したがって、その方法は、本明細書において示される検出方法を具現するソフトウエア又はファームウエアを有する1つ又は複数のプロセッサによって、かつ/又は特定用途向け集積チップによって実施することができる。本技術のいくつかの実施形態では、検出された事象に従って、人工呼吸器による呼吸治療に対する調整を自動化することができる。例えば、1つのタイプの事象が、異なる自動人工呼吸器応答又は呼吸治療応答を生成できるように、どの非同期性タイプが検出されたかに従って、人工呼吸器の制御された治療応答を変更することができる。さらに、検出された事象は、記録されるか、又はスコア化することができる。したがって、そのような装置は、何回発生したか、いつ発生したか等の種々の事象の発生詳細に関する報告を生成することができる。これらの詳細は、オプションで、検出変数の値に関連付けて、又は1組の検出変数及び他の流れ又は圧力データに関連付けて表示することができる。
【0124】
例えば、一実施形態では、循環呼吸治療装置を用いて呼吸治療中に取り込まれる流れ及び/又は圧力測定値を表すデータから、処理装置又は呼吸治療装置によって、複数の異なる非同期性事象又は1つの非同期性事象を検出することができる。1つのそのような実施形態では、1組の検出変数は、処理装置又は呼吸治療装置のプロセッサによって決定される、PW線形近似電力、PW距離流最大最小、PW体積偏差、Taui及びPW距離比の尺度のうちの1つ又は複数を含むことができる。その後、これらの変数を、処理装置によって、その関連付けられる所定のしきい値と比較し、無効呼気努力非同期性事象が生じたか否かを検出することができる。処理装置又は呼吸治療装置は更に、ポストトリガー努力、ダブルトリガー、自動トリガー、後期トリガー、早期循環及び/又は後期循環のうちの1つまたは複数のような他のタイプの非同期性事象を検出するか、又はスコア化することができる。
【0125】
オプションでは、いくつかの実施形態において、これらの非同期性事象の検出は、咳、嚥下等の人為現象の自動検出時に、装置によって除外することができる(すなわち、スコア化されない)。そのような事象の判定は、国際公開第2006/079152号において示されており、その開示全体が参照により本明細書に援用される。
【0126】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータから2つ以上の異なるタイプの非同期性事象を自動的に検出するように装置が構成される。
【0127】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、無効呼気努力非同期性事象を自動的に検出するように装置が構成される。
【0128】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、無効呼気努力非同期性事象を自動的に検出するように装置が構成され、その検出は、PW線形近似電力、PW距離流最大最小、PW体積偏差、Taui及びPW距離比のような、呼吸機構に基づく特徴及び/又は呼気流形態に基づく特徴を表す、2つ以上の計算された特徴の解析を伴う。例えば、その解析は、計算された特徴と、1組のしきい値又はしきい値関数との比較とすることができる。
【0129】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、ポストトリガー努力非同期性事象を自動的に検出するように装置が構成される。
【0130】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、ダブルトリガー非同期性事象を自動的に検出するように装置が構成される。
【0131】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、自動トリガー非同期性事象を自動的に検出するように装置が構成される。
【0132】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、後期トリガー非同期性事象を自動的に検出するように装置が構成される。
【0133】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、早期循環非同期性事象を自動的に検出するように装置が構成される。
【0134】
本技術のいくつかの実施形態では、循環呼吸治療デバイス又は人工呼吸器を用いて圧力治療中に取り込まれる流れ及び/又は圧力測定値を表すデータに基づいて、後期循環非同期性事象を自動的に検出するように装置が構成される。
【0135】
検出された非同期性事象のうちのいずれか1つ、いくつか、又は全てが、流れ又は圧力測定値の処理に基づいて、患者−人工呼吸器相互作用の品質を非侵襲的に、かつ簡単に判定するための測定基準としての役割を果たすことができる。したがって、他の測定デバイス又は機器は必ずしも用いられる必要はない。
【0136】
実施されるいくつかの実施形態では、数多くの患者からのデータの経験的又は臨床的観察からしきい値を最適化することができるが、先に言及された特徴のいずれかを利用する非同期性検出は、特定の患者からの流れ及び/圧力データを臨床的に観察することによって、かつ先に言及された方法によるその特定の患者のための自動特徴選択、及び選択された特徴の自動分類を利用することによって、特定の患者に対して最適化することもできる。したがって、特徴部分集合選択及びしきい値判定を実行するようにプログラムされる別個の調整装置又はコンピュータによって行なわれる特徴の自動選択及びしきい値判定の結果に従って、検出又は治療装置を被検者毎に調整又はプログラムすることができる。オプションでは、これらの方法は、人工呼吸器又は呼吸治療デバイスのプログラミングの中に組み込むこともできる。
【0137】
非同期性事象の検出が実施される装置は、生理的パラメータが特定の非同期性に及ぼす影響を関連付けることによって、非同期性の仕組みを理解できるようにするための手段としての役割を果たすことができる。
【0138】
また、その装置は、特定の被検者のための患者−人工呼吸器使用時の非同期性を予測するための手段としての役割も果たすことができる。したがって、その被検者の呼吸器治療のための予後を、治療へのコンプライアンス、入院加療滞在、ウィーニング成功、死亡率、COPD増悪の発生、睡眠品質等に関して評価することができる。
【0139】
人工呼吸器又は循環呼吸治療デバイスにおける種々のタイプの非同期性事象のうちの1つ又は複数の自動検出は、患者治療中のデバイスのサーボ滴定のための制御フィードバックとしての役割を果たすことができる(例えば、スマート治療アルゴリズム)。
【0140】
本発明の他の実施形態及び変更形態は、本開示の細部の全てを検討することから明らかになるであろう。
【0141】
呼吸治療装置実施形態の例
図11を参照すると、本非同期性検出技術は、人工呼吸器又は他の呼吸治療装置のような、呼吸治療装置1102を用いて実施することができ、その装置は、治療動作と患者呼吸とを同期させる。そのような装置は、サーボ制御式送風機1104のような流れ発生器を含むことができる。送風機1104は通常、給気口と、モータ(図示せず)によって駆動されるインペラとを備えることができる。
【0142】
呼吸治療装置1102は通常、患者に呼吸可能ガスの流れを、かつ/又は患者から空気の流れを搬送するために、空気送達管1106及びマスク1108又は気管内チューブ(図示せず)のような患者インターフェースも備える。
【0143】
装置1102は、圧力センサ及び/又は流れセンサのようなセンサ1110も備えることができる。そのような実施形態では、圧力変換器のような圧力センサは、送風機1104によって生成される圧力を測定し、気道における圧力のような、圧力の測定値を指示する圧力信号p(t)を生成することができる。同様に、流れセンサは、患者の呼吸の流れを表す信号を生成する。例えば、呼吸流量計、及びチューブ又はダクトの束を利用するような差圧変換器又は類似のデバイスを用いて、患者インターフェース又はセンスチューブ(図示せず)に隣接する流れを測定し、流れ信号f(t)を導出することができる。オプションでは、この流れ信号を調整して、オフセット及び漏れを補償することができる。装置の方法の目的を果たすために、他のセンサを利用して、流れ又は圧力を指示するデータを生成することもできる。例えば、いくつかの実施形態では、装置は、経横隔膜圧を表す信号を生成する経横隔膜圧センサを含むこともできる。同様に、装置は、オプションでは、胸腔内圧及び/又は腹圧を表す1つ又は複数の信号を生成するのに適した1つ又は複数のセンサも含むことができる。
【0144】
流れf(t)及び/又は圧力p(t)信号のようなセンサ信号に基づいて、コントローラ1112が、送風機制御信号を生成することができる。例えば、コントローラは、所望の圧力設定点を生成し、その設定点を圧力センサの測定された条件と比較することによって、その設定点を満たすように送風機の速度をサーボ制御することができる。したがって、コントローラ1112は、送風機1104によって患者インターフェースに送達される圧力を制御しながら変更することができる。通常、そのような設定は、治療と患者呼吸とを同期させるために、又は患者の呼吸を支援するために行なうことができ、トリガー又は循環しきい値のような制御パラメータに関連して流れ信号を解析すること等によって、患者呼吸の状態の検出との関連で行なうことができる。オプションで、圧力の変更は、相対的に一定の送風機速度を保持しながら、機械的な放出弁(図示せず)を用いて排気を制御し、排気を増減することによって実施することができる。同様に、流れf(t)及び/又は圧力p(t)信号に基づいて、コントローラ1112は、本明細書において更に詳細に説明される本非同期性事象検出方法を実施することができる。
【0145】
したがって、コントローラ1112は、本明細書において更に詳細に説明される特定の方法又はアルゴリズムを実施するようにプログラムされる1つ又は複数のプロセッサを含むことができる。このために、コントローラは、集積チップ、メモリ及び/又は他の制御命令、データ、又は情報記憶媒体を含むことができる。例えば、そのような制御方法を包含するプログラムされた命令は、デバイスのメモリ内の集積チップ上にコーディングすることができる。そのような命令は同様に、又は代替的に、適切なデータ記憶媒体を用いてソフトウエア又はファームウエアとしてロードすることができる。
【0146】
いくつかのそのような実施形態では、コントローラは、非同期性事象を検出又はスコア化し、そのような非同期性事象の検出又はスコア化に基づいて、呼吸治療のための圧力制御パラメータを変更することができる。例えば、無効吸気努力非同期性事象のうちの1つ又は複数が検出された場合には、コントローラは、コントローラによって用いられるトリガーしきい値を自動的に下げて(例えば、ステップダウンして)、患者吸気を検出し、吸気圧力レベルの制御を開始することができる。非同期性事象を続けて検出する場合には、更にステップ変更を行なうこともできる。オプションで、複数のそのような非同期性事象を検出するのに応答して、コントローラ又はプロセッサは、臨床医のための出力メッセージを生成し、トリガーしきい値設定の変更が手動で行なわれるべきであること、又は自動的に行なわれたことを示すことができる。同様に、後期トリガー非同期事象の検出が、呼吸治療装置のトリガーしきい値に関するステップ変更又はメッセージを制御するための役割を果たす場合がある。そのような場合、後期トリガーに応答して行なわれるか、又は推奨されるステップ変更は、無効努力非同期性事象の検出に関連付けられるステップ変更よりも小さくすることができる。
【0147】
更に別の例として、自動トリガー非同期性事象の検出が、1つ又は複数のステップ変更又はメッセージを制御して、呼吸治療装置のトリガーしきい値を上げるための役割を果たす場合がある。種々の非同期性事象に基づいてトリガーしきい値のステップ増加及び減少を制御して、これらの事象のカウントを減少させることによって、トリガーしきい値を最適な設定にサーボ制御することができる。
【0148】
同じようにして、後期循環及び/又は早期循環事象の検出時に、コントローラ又はプロセッサによって呼吸治療装置の循環しきい値の調整が行なわれるか、又は推奨され、これらの事象を低減し、それにより循環しきい値のための設定を最適化することができる。
【0149】
非同期性事象の検出に従って、呼吸治療装置の制御パラメータに対する他の変更も行なうこともできるし、推奨することもできる。
【0150】
コントローラ/処理装置アーキテクチャの例
処理装置(例えば、コンピュータ又はコントローラ1112)のシステムアーキテクチャ例が図12のブロック図に示される。そのシステムアーキテクチャは、非同期性検出を有する呼吸治療装置コントローラとしての役割を果たす場合があるか、又はより単純に、専用コンピュータのようなスタンドアローンの非同期性検出器としての役割を果たす場合がある。図において、検出デバイス1206は、1つ又は複数のプログラマブルプロセッサ1208を有する汎用コンピュータによって実現することができる。また、そのデバイスは、先に検討されたような検出方法からのデータ(例えば、非同期性事象及び情報等)、本明細書において説明されるような結果又はグラフを、モニタ又はLCDパネルのようなディスプレイに出力するためのディスプレイインターフェース1210も含むことができる。データを入力するために、又は別の方法で本明細書において記述される方法を起動又は動作させるために、ユーザ制御/入力インターフェース1212、例えば、キーボード、タッチパネル、制御ボタン、マウス等を含むこともできる。また、そのデバイスは、上記の方法のプログラミング命令、流れデータ、圧力データ、非同期性データ、特徴集合計算アルゴリズム、特徴部分集合選択アルゴリズム、特徴集合値及び他の出力又は入力のようなデータを受信/送信するための、バスのようなセンサ又はデータインターフェース1214も含むことができる。
【0151】
また、そのデバイスは、上記の方法及びアルゴリズムの制御命令及びデータを含む、メモリ/データ記憶構成要素1220も含む。1222において、これらの構成要素は、本明細書において更に詳細に検討されるような非同期性事象検出のための格納されたプロセッサ制御命令も含むことができる。例えば、これは、特徴集合値計算命令及びしきい値又はしきい値関数比較命令を含むことができる。例えば、1224において、それらの構成要素は、特徴計算及び呼吸セグメント化のような、流れ及び圧力信号を処理するための格納されたプロセッサ制御命令を含むことができる。1226において、それらの構成要素は、呼吸治療制御パラメータ、換気制御パラメータ、又は圧力治療同期方法のような、デバイスの起動を制御するためのプロセッサ制御命令も含むことができる。これは、例えば、検出された非同期性事象に基づく圧力制御調整等を含むことができる。オプションで、又は代替的には、1228において、それらの構成要素は、パルツェン窓推定器、SFFS選択器等のための命令のような、特徴集合判定のためのプロセッサ制御命令を含むことができる。最後に、それらの構成要素は、1230において、流れデータ、圧力データ、呼吸セグメント化データ、1つ又は複数の非同期性事象を検出するための特徴集合、特徴集合値、しきい値、しきい値関数、検出された非同期性事象及び関連する情報、既知の非同期性事象データ、特徴部分集合、特徴上位集合、報告及びグラフ等の、これらの方法のための格納されたデータも含むことができる。
【0152】
いくつかの実施形態において、上記の方法を制御するためのプロセッサ制御命令及びデータのいくつか又は全てを、汎用コンピュータによって用いるためのソフトウエアとしてコンピュータ可読記録媒体内に含めることができ、それにより、そのソフトウエアを汎用コンピュータにロードする際に、本明細書において検討される方法のいずれかに従って、汎用コンピュータが専用コンピュータとしての役割を果たすことができるようになる。
【0153】
これまでの説明において、かつ添付の図面において、本技術を完全に理解してもらうために、特定の用語、式及び図面記号が記述されてきた。場合によっては、その用語及び記号は、本技術を実施するのに必要ではない具体的な細かい部分を含むことができる。さらに、本明細書における技術は、特定の実施形態を参照しながら説明されてきたが、これらの実施形態は本技術の原理及び用途を例示するにすぎないことは理解されたい。それゆえ、本技術の精神及び範囲から逸脱することなく、例示される実施形態に数多くの変更を加えることができること、及び他の構成を考案することができることが理解されたい。例えば、いくつかの検出器の実施形態では、流れ及び/又は圧力データに加えて、特徴集合は、経横隔膜圧信号からのデータに基づくこともできる。
【符号の説明】
【0154】
1102:呼吸治療装置
1104:送風機
1106:空気送達管
1108:マスク
1110:センサ
1112:コントローラ
【特許請求の範囲】
【請求項1】
同期した呼吸治療の送達を制御する呼吸治療装置の非同期性を検出するための自動処理方法であって、
前記呼吸治療装置と結合された少なくとも1つのセンサの信号から導出されるデータを用いて特徴集合の検出値を求めることと、
プロセッサを用いて、前記検出値の特徴集合を1組のしきい値と比較することと、
前記プロセッサを用いて、前記比較に基づいて、前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定することと、
を含む、方法。
【請求項2】
前記検出値の特徴集合は、呼吸数に基づく特徴を含む、請求項1に記載の方法。
【請求項3】
前記検出値の特徴集合は、呼吸量に基づく特徴を含む、請求項1に記載の方法。
【請求項4】
前記検出値の特徴集合は、呼吸機構に基づく特徴を含む、請求項1に記載の方法。
【請求項5】
圧力指標、流れ指標、及び体積指標に基づいて、抵抗値及びコンプライアンス値を求めることを更に含む、請求項4に記載の方法。
【請求項6】
前記判定することは、多重線形回帰処理を含む、請求項5に記載の方法。
【請求項7】
前記求められた抵抗値及びコンプライアンス値の精度を評価することを更に含む、請求項6に記載の方法。
【請求項8】
前記精度を評価することは、決定係数を計算すること、及び該係数をしきい値と比較することを含む、請求項7に記載の方法。
【請求項9】
前記抵抗値及びコンプライアンス値を求めることは、検出された呼吸サイクルの一部分から取り込まれる指標に基づく、請求項6に記載の方法。
【請求項10】
前記一部分は呼気部分である、請求項9に記載の方法。
【請求項11】
前記一部分は、一回換気量の或るパーセンテージが吐出される呼気の初期部分である、請求項10に記載の方法。
【請求項12】
前記パーセンテージは約85パーセント〜90パーセントの範囲内にある、請求項11に記載の方法。
【請求項13】
前記検出値の特徴集合は、呼気流形態に基づく特徴を含む、請求項1に記載の方法。
【請求項14】
前記比較に基づいて複数の異なる非同期性事象を判定することを更に含む、請求項1に記載の方法。
【請求項15】
前記非同期性事象は、無効呼気努力事象を含む、請求項1に記載の方法。
【請求項16】
前記検出値の特徴集合は、(a)最大呼気流の位置以降の呼気の残りの部分の区分的双線形近似の電力、(b)移動平均呼気流の最大値と最小値との間の距離、(c)整流され、トレンドを除去された呼気流移動平均の積分、(d)吸気時定数、及び(e)前記距離及びピーク呼気流の或る割合を含む、請求項15に記載の方法。
【請求項17】
前記無効努力事象中に動くガスの体積を求めることを更に含む、請求項15に記載の方法。
【請求項18】
前記非同期性事象は事後トリガー努力事象を含む、請求項1に記載の方法。
【請求項19】
前記非同期性事象はダブルトリガー事象を含む、請求項1に記載の方法。
【請求項20】
前記特徴集合は、最大値カウント、及び最大値間で経過した時間を含む、請求項19に記載の方法。
【請求項21】
前記非同期性事象は自動トリガー事象を含む、請求項1に記載の方法。
【請求項22】
前記非同期性事象は後期トリガー事象を含む、請求項1に記載の方法。
【請求項23】
前記非同期性事象は早期循環事象を含む、請求項1に記載の方法。
【請求項24】
前記非同期性事象は後期循環事象を含む、請求項1に記載の方法。
【請求項25】
前記非同期性事象は無効吸気努力事象を含む、請求項1に記載の方法。
【請求項26】
前記プロセッサは前記呼吸治療装置のコントローラを含み、前記センサは流れセンサを含み、前記コントローラは、前記流れセンサの信号を用いて呼吸サイクルを検出し、かつ前記呼吸治療をもたらすための流れ発生器制御信号を生成するように構成される、請求項1に記載の方法。
【請求項27】
前記呼吸治療装置は人工呼吸器を含む、請求項26に記載の方法。
【請求項28】
前記コントローラは、前記非同期性事象の発生に基づいて、前記呼吸治療を送達するための制御パラメータを自動的に変更するように構成される、請求項27に記載の方法。
【請求項29】
前記制御パラメータはトリガーしきい値を含む、請求項28に記載の方法。
【請求項30】
前記制御パラメータは循環しきい値を含む、請求項29に記載の方法。
【請求項31】
前記特徴集合が特徴の上位集合の部分集合を含むように該特徴集合を選択することを更に含み、
前記選択することは、プロセッサを用いて、複数の呼吸治療装置で確立される複数の呼吸のデータにおいて生じる既知の非同期性事象のための前記上位集合の値を評価することを含む、請求項1に記載の方法。
【請求項32】
前記評価することは、パルツェン窓評価によって前記上位集合の値を用いて事後確率を計算することを含み、前記上位集合の値群は、値を繰返し包含及び除去することによって選択される、請求項31に記載の方法。
【請求項33】
同期した呼吸治療と呼吸サイクルとの間の非同期性を検出するための装置であって、
前記呼吸治療装置と結合された少なくとも1つのセンサの信号から導出される検出値の特徴集合を表すデータを含むメモリと、
前記データにアクセスするためのプロセッサであって、
前記検出値の特徴集合の前記データと前記メモリの1組のしきい値との比較、
前記比較に基づく前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生の判定、及び
前記非同期性事象の発生を表す出力の生成、
を制御するように構成される、プロセッサと、
を備える、装置。
【請求項34】
呼吸可能ガスの流れを患者に搬送するための患者インターフェースと、
前記患者インターフェースと結合され、該患者インターフェースを通る前記呼吸可能ガスの流れを生成するための流れ発生器と、
前記患者インターフェースを通る患者流を示す信号を与えるための変換器と、
を更に備え、
前記プロセッサは前記流れ発生器のコントローラを含み、該コントローラは、前記流れセンサの信号を用いて呼吸サイクルを検出し、前記呼吸治療をもたらすための流れ発生器制御信号を生成するように構成される、請求項33に記載の装置。
【請求項35】
前記検出値の特徴集合は、呼吸数に基づく特徴を含む、請求項34に記載の装置。
【請求項36】
前記検出値の特徴集合は、呼吸量に基づく特徴を含む、請求項34に記載の装置。
【請求項37】
前記検出値の特徴集合は、呼吸機構に基づく特徴を含む、請求項34に記載の装置。
【請求項38】
前記プロセッサは、圧力指標、流れ指標、及び体積指標に基づいて抵抗値及びコンプライアンス値を求めるのを制御するように構成される、請求項37に記載の装置。
【請求項39】
前記プロセッサは、前記圧力指標、前記流れ指標、及び前記体積指標の多重線形回帰処理を制御するように構成される、請求項38に記載の装置。
【請求項40】
前記プロセッサは、前記求められた抵抗値及びコンプライアンス値の精度の評価を制御するように更に構成される、請求項39に記載の装置。
【請求項41】
前記精度の評価は、決定係数を計算すること、及び該係数をしきい値と比較することを含む、請求項40に記載の装置。
【請求項42】
前記抵抗値及びコンプライアンス値を求めることは、検出された呼吸サイクルの一部分から取り込まれる指標に基づく、請求項39に記載の装置。
【請求項43】
前記一部分は呼気部分である、請求項42に記載の装置。
【請求項44】
前記一部分は、一回換気量の或るパーセンテージが吐出される呼気の初期部分である、請求項43に記載の装置。
【請求項45】
前記パーセンテージは、約85パーセント〜90パーセントの範囲内にある、請求項44に記載の装置。
【請求項46】
前記検出値の特徴集合は、呼気流形態に基づく特徴を含む、請求項34に記載の装置。
【請求項47】
前記比較に基づいて複数の異なる非同期性事象を判定することを更に含む、請求項34に記載の装置。
【請求項48】
前記非同期性事象は、無効呼気努力事象を含む、請求項34に記載の装置。
【請求項49】
前記検出値の特徴集合は、(a)最大呼気流の位置以降の呼気の残りの部分の区分的双線形近似の電力、(b)移動平均呼気流の最大値と最小値との間の距離、(c)整流され、トレンドを除去された呼気流移動平均の積分、(d)吸気時定数、及び(e)前記距離及びピーク呼気流の或る割合を含む、請求項48に記載の装置。
【請求項50】
前記特徴集合は、前記無効努力事象中に動くガスの求められた体積を含む、請求項48に記載の装置。
【請求項51】
前記非同期性事象は事後トリガー努力事象を含む、請求項34に記載の装置。
【請求項52】
前記非同期性事象はダブルトリガー事象を含む、請求項34に記載の装置。
【請求項53】
前記特徴集合は、最大値カウント及び最大値間で経過した時間を含む、請求項52に記載の装置。
【請求項54】
前記非同期性事象は自動トリガー事象を含む、請求項34に記載の装置。
【請求項55】
前記非同期性事象は後期トリガー事象を含む、請求項34に記載の装置。
【請求項56】
前記非同期性事象は早期循環事象を含む、請求項34に記載の装置。
【請求項57】
前記非同期性事象は後期循環事象を含む、請求項34に記載の装置。
【請求項58】
前記非同期性事象は無効吸気努力事象を含む、請求項34に記載の装置。
【請求項59】
前記コントローラは、前記非同期性事象の発生に基づいて、前記呼吸治療を送達するための制御パラメータを自動的に変更するように構成される、請求項34に記載の装置。
【請求項60】
前記制御パラメータはトリガーしきい値を含む、請求項59に記載の装置。
【請求項61】
前記制御パラメータは循環しきい値を含む、請求項59に記載の装置。
【請求項62】
前記呼吸治療装置は人工呼吸器を含む、請求項34に記載の装置。
【請求項63】
前記プロセッサは、前記特徴集合が特徴の上位集合の部分集合を含むように該特徴集合の選択を制御するように更に構成され、
前記選択は、複数の呼吸治療装置で確立される複数の呼吸のデータにおいて生じる既知の非同期性事象のための前記上位集合の値を評価することを含む、請求項33に記載の装置。
【請求項64】
前記評価することは、パルツェン窓評価によって前記上位集合の値を用いて事後確率を計算することを含み、前記上位集合の値群は、値を繰返し包含及び除去することによって選択される、請求項63に記載の装置。
【請求項65】
同期した呼吸治療と呼吸サイクルとの間の非同期性を検出するためのシステムであって、
呼吸治療装置の使用からもたらされる1つ又は複数の圧力変換器信号から導出されるデータを処理する処理手段を備え、該処理手段は、(a)前記データから計算される検出値の特徴集合を1組のしきい値と比較し、(b)前記比較に基づいて、前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定するように構成される、システム。
【請求項66】
前記特徴集合が特徴の上位集合の部分集合を含むように該特徴集合を選択する分類手段を更に備え、
前記選択は、複数の呼吸治療装置によって確立される複数の呼吸のデータにおいて生じる既知の非同期性事象のための前記上位集合の値を評価することを含む、請求項65に記載のシステム。
【請求項67】
前記処理手段は、呼吸治療装置に結合された少なくとも1つのセンサの信号から導出されるデータを用いて前記特徴集合の検出値を計算するように更に構成される、請求項66に記載のシステム。
【請求項68】
前記検出値の特徴集合は、(a)呼吸数に基づく特徴、(b)呼吸量に基づく特徴、(c)呼吸機構に基づく特徴、(d)呼気流形態に基づく特徴からなる一群の特徴のうちの2つ以上の特徴を含む、請求項67に記載のシステム。
【請求項69】
前記非同期性事象の発生は、(a)無効呼気努力事象、(b)事後トリガー努力事象、(c)ダブルトリガー事象、(d)自動トリガー事象、(e)後期トリガー事象、(f)早期循環事象、及び(g)後期循環事象からなる一群の非同期性事象のうちの1つの非同期性事象を含む、請求項65に記載のシステム。
【請求項70】
呼吸可能ガスの流れを搬送するインターフェース手段と、
前記インターフェース手段と結合され、前記呼吸可能ガスを生成する流れ発生手段と、
前記圧力変換器信号を生成するための流れセンサと、
を更に備え、
前記処理手段は、前記流れ発生手段を制御して、同期した呼吸治療を提供するように更に構成される、請求項65に記載のシステム。
【請求項71】
前記同期した呼吸治療は呼吸支援換気である、請求項70に記載のシステム。
【請求項72】
プロセッサ可読情報を有する情報保持媒体であって、該プロセッサ可読情報は、同期した呼吸治療と呼吸サイクルとの間の非同期性を検出するための装置を制御し、該プロセッサ可読情報は、
前記呼吸治療装置と結合された少なくとも1つのセンサの信号から導出されるデータを用いて特徴集合の検出値にアクセスするための制御命令と、
前記検出値の特徴集合を1組のしきい値と比較するための制御命令と、
前記比較に基づいて前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定するための制御命令と、
を含む、情報保持媒体。
【請求項73】
流れ指標及び圧力指標に基づいて呼吸抵抗及びコンプライアンスを推定するための呼吸治療装置であって、
流れ及び圧力を表す信号を生成するための1つ又は複数のセンサと、
前記1つ又は複数のセンサと結合されたプロセッサであって、
前記流れ信号のデータから呼吸サイクルの呼気部分を検出することと、
前記検出された呼気部分に対応する流れ指標、圧力指標、及び体積指標を用いて、抵抗値及びコンプライアンス値を計算することと、
を制御するように構成される、プロセッサと、
を備える、呼吸治療装置。
【請求項74】
前記検出された呼気部分は、呼気サイクルにおいて開始し、該呼気サイクルの場合に吐出される一回換気量が約85パーセント〜90パーセントの範囲内の限度を超えるときに終了する、請求項73に記載の呼吸治療装置。
【請求項75】
前記計算は、前記流れ指標、前記圧力指標、及び前記体積指標を表すデータを用いる多重線形回帰過程を含む、請求項74に記載の呼吸治療装置。
【請求項76】
前記抵抗値及び前記コンプライアンス値は呼吸過程毎に計算される、請求項75に記載の呼吸治療装置。
【請求項77】
前記プロセッサは、前記求められた抵抗値及びコンプライアンス値の精度の評価を制御するように更に構成される、請求項74に記載の呼吸治療装置。
【請求項78】
前記精度の評価は、決定係数を計算すること、及び該決定係数をしきい値と比較することを含む、請求項77に記載の呼吸治療装置。
【請求項79】
前記プロセッサは、該プロセッサの前記計算によって求められた複数のコンプライアンス値に基づいて、PEEP制御パラメータを求めることを制御するように更に構成される、請求項73に記載の呼吸治療装置。
【請求項80】
前記プロセッサは、予め設定されたPEEP制御パラメータに対して繰り返される変更を制御し、その間に複数の圧力指標及び流れ指標が求められ、前記複数のコンプライアンス値は、該複数の圧力指標及び流れ指標に基づいて求められる、請求項79に記載の呼吸治療装置。
【請求項81】
前記PEEP制御パラメータを求めることは、前記複数のコンプライアンス値を表すデータから変曲点を検出することを含む、請求項80に記載の呼吸治療装置。
【請求項82】
前記プロセッサは、該プロセッサの前記計算によって求められた複数のコンプライアンス値に基づいて、最大圧支援限界を求めることを制御するように更に構成される、請求項73に記載の呼吸治療装置。
【請求項83】
前記プロセッサは、予め設定されたPEEP制御パラメータに対して繰り返される変更を制御し、その間に複数の圧力指標及び流れ指標が求められ、前記複数のコンプライアンス値は、前記複数の圧力指標及び流れ指標に基づいて求められる、請求項82に記載の呼吸治療装置。
【請求項84】
前記最大圧支援限界を求めることは、前記複数のコンプライアンス値を表すデータから変曲点を検出することを含む、請求項80に記載の呼吸治療装置。
【請求項85】
前記プロセッサと結合され、前記プロセッサからの制御信号に基づいて患者インターフェースに対して大気圧より高い圧力の呼吸可能ガスの流れを生成するための流れ発生器を更に含む、請求項76に記載の呼吸治療装置。
【請求項1】
同期した呼吸治療の送達を制御する呼吸治療装置の非同期性を検出するための自動処理方法であって、
前記呼吸治療装置と結合された少なくとも1つのセンサの信号から導出されるデータを用いて特徴集合の検出値を求めることと、
プロセッサを用いて、前記検出値の特徴集合を1組のしきい値と比較することと、
前記プロセッサを用いて、前記比較に基づいて、前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定することと、
を含む、方法。
【請求項2】
前記検出値の特徴集合は、呼吸数に基づく特徴を含む、請求項1に記載の方法。
【請求項3】
前記検出値の特徴集合は、呼吸量に基づく特徴を含む、請求項1に記載の方法。
【請求項4】
前記検出値の特徴集合は、呼吸機構に基づく特徴を含む、請求項1に記載の方法。
【請求項5】
圧力指標、流れ指標、及び体積指標に基づいて、抵抗値及びコンプライアンス値を求めることを更に含む、請求項4に記載の方法。
【請求項6】
前記判定することは、多重線形回帰処理を含む、請求項5に記載の方法。
【請求項7】
前記求められた抵抗値及びコンプライアンス値の精度を評価することを更に含む、請求項6に記載の方法。
【請求項8】
前記精度を評価することは、決定係数を計算すること、及び該係数をしきい値と比較することを含む、請求項7に記載の方法。
【請求項9】
前記抵抗値及びコンプライアンス値を求めることは、検出された呼吸サイクルの一部分から取り込まれる指標に基づく、請求項6に記載の方法。
【請求項10】
前記一部分は呼気部分である、請求項9に記載の方法。
【請求項11】
前記一部分は、一回換気量の或るパーセンテージが吐出される呼気の初期部分である、請求項10に記載の方法。
【請求項12】
前記パーセンテージは約85パーセント〜90パーセントの範囲内にある、請求項11に記載の方法。
【請求項13】
前記検出値の特徴集合は、呼気流形態に基づく特徴を含む、請求項1に記載の方法。
【請求項14】
前記比較に基づいて複数の異なる非同期性事象を判定することを更に含む、請求項1に記載の方法。
【請求項15】
前記非同期性事象は、無効呼気努力事象を含む、請求項1に記載の方法。
【請求項16】
前記検出値の特徴集合は、(a)最大呼気流の位置以降の呼気の残りの部分の区分的双線形近似の電力、(b)移動平均呼気流の最大値と最小値との間の距離、(c)整流され、トレンドを除去された呼気流移動平均の積分、(d)吸気時定数、及び(e)前記距離及びピーク呼気流の或る割合を含む、請求項15に記載の方法。
【請求項17】
前記無効努力事象中に動くガスの体積を求めることを更に含む、請求項15に記載の方法。
【請求項18】
前記非同期性事象は事後トリガー努力事象を含む、請求項1に記載の方法。
【請求項19】
前記非同期性事象はダブルトリガー事象を含む、請求項1に記載の方法。
【請求項20】
前記特徴集合は、最大値カウント、及び最大値間で経過した時間を含む、請求項19に記載の方法。
【請求項21】
前記非同期性事象は自動トリガー事象を含む、請求項1に記載の方法。
【請求項22】
前記非同期性事象は後期トリガー事象を含む、請求項1に記載の方法。
【請求項23】
前記非同期性事象は早期循環事象を含む、請求項1に記載の方法。
【請求項24】
前記非同期性事象は後期循環事象を含む、請求項1に記載の方法。
【請求項25】
前記非同期性事象は無効吸気努力事象を含む、請求項1に記載の方法。
【請求項26】
前記プロセッサは前記呼吸治療装置のコントローラを含み、前記センサは流れセンサを含み、前記コントローラは、前記流れセンサの信号を用いて呼吸サイクルを検出し、かつ前記呼吸治療をもたらすための流れ発生器制御信号を生成するように構成される、請求項1に記載の方法。
【請求項27】
前記呼吸治療装置は人工呼吸器を含む、請求項26に記載の方法。
【請求項28】
前記コントローラは、前記非同期性事象の発生に基づいて、前記呼吸治療を送達するための制御パラメータを自動的に変更するように構成される、請求項27に記載の方法。
【請求項29】
前記制御パラメータはトリガーしきい値を含む、請求項28に記載の方法。
【請求項30】
前記制御パラメータは循環しきい値を含む、請求項29に記載の方法。
【請求項31】
前記特徴集合が特徴の上位集合の部分集合を含むように該特徴集合を選択することを更に含み、
前記選択することは、プロセッサを用いて、複数の呼吸治療装置で確立される複数の呼吸のデータにおいて生じる既知の非同期性事象のための前記上位集合の値を評価することを含む、請求項1に記載の方法。
【請求項32】
前記評価することは、パルツェン窓評価によって前記上位集合の値を用いて事後確率を計算することを含み、前記上位集合の値群は、値を繰返し包含及び除去することによって選択される、請求項31に記載の方法。
【請求項33】
同期した呼吸治療と呼吸サイクルとの間の非同期性を検出するための装置であって、
前記呼吸治療装置と結合された少なくとも1つのセンサの信号から導出される検出値の特徴集合を表すデータを含むメモリと、
前記データにアクセスするためのプロセッサであって、
前記検出値の特徴集合の前記データと前記メモリの1組のしきい値との比較、
前記比較に基づく前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生の判定、及び
前記非同期性事象の発生を表す出力の生成、
を制御するように構成される、プロセッサと、
を備える、装置。
【請求項34】
呼吸可能ガスの流れを患者に搬送するための患者インターフェースと、
前記患者インターフェースと結合され、該患者インターフェースを通る前記呼吸可能ガスの流れを生成するための流れ発生器と、
前記患者インターフェースを通る患者流を示す信号を与えるための変換器と、
を更に備え、
前記プロセッサは前記流れ発生器のコントローラを含み、該コントローラは、前記流れセンサの信号を用いて呼吸サイクルを検出し、前記呼吸治療をもたらすための流れ発生器制御信号を生成するように構成される、請求項33に記載の装置。
【請求項35】
前記検出値の特徴集合は、呼吸数に基づく特徴を含む、請求項34に記載の装置。
【請求項36】
前記検出値の特徴集合は、呼吸量に基づく特徴を含む、請求項34に記載の装置。
【請求項37】
前記検出値の特徴集合は、呼吸機構に基づく特徴を含む、請求項34に記載の装置。
【請求項38】
前記プロセッサは、圧力指標、流れ指標、及び体積指標に基づいて抵抗値及びコンプライアンス値を求めるのを制御するように構成される、請求項37に記載の装置。
【請求項39】
前記プロセッサは、前記圧力指標、前記流れ指標、及び前記体積指標の多重線形回帰処理を制御するように構成される、請求項38に記載の装置。
【請求項40】
前記プロセッサは、前記求められた抵抗値及びコンプライアンス値の精度の評価を制御するように更に構成される、請求項39に記載の装置。
【請求項41】
前記精度の評価は、決定係数を計算すること、及び該係数をしきい値と比較することを含む、請求項40に記載の装置。
【請求項42】
前記抵抗値及びコンプライアンス値を求めることは、検出された呼吸サイクルの一部分から取り込まれる指標に基づく、請求項39に記載の装置。
【請求項43】
前記一部分は呼気部分である、請求項42に記載の装置。
【請求項44】
前記一部分は、一回換気量の或るパーセンテージが吐出される呼気の初期部分である、請求項43に記載の装置。
【請求項45】
前記パーセンテージは、約85パーセント〜90パーセントの範囲内にある、請求項44に記載の装置。
【請求項46】
前記検出値の特徴集合は、呼気流形態に基づく特徴を含む、請求項34に記載の装置。
【請求項47】
前記比較に基づいて複数の異なる非同期性事象を判定することを更に含む、請求項34に記載の装置。
【請求項48】
前記非同期性事象は、無効呼気努力事象を含む、請求項34に記載の装置。
【請求項49】
前記検出値の特徴集合は、(a)最大呼気流の位置以降の呼気の残りの部分の区分的双線形近似の電力、(b)移動平均呼気流の最大値と最小値との間の距離、(c)整流され、トレンドを除去された呼気流移動平均の積分、(d)吸気時定数、及び(e)前記距離及びピーク呼気流の或る割合を含む、請求項48に記載の装置。
【請求項50】
前記特徴集合は、前記無効努力事象中に動くガスの求められた体積を含む、請求項48に記載の装置。
【請求項51】
前記非同期性事象は事後トリガー努力事象を含む、請求項34に記載の装置。
【請求項52】
前記非同期性事象はダブルトリガー事象を含む、請求項34に記載の装置。
【請求項53】
前記特徴集合は、最大値カウント及び最大値間で経過した時間を含む、請求項52に記載の装置。
【請求項54】
前記非同期性事象は自動トリガー事象を含む、請求項34に記載の装置。
【請求項55】
前記非同期性事象は後期トリガー事象を含む、請求項34に記載の装置。
【請求項56】
前記非同期性事象は早期循環事象を含む、請求項34に記載の装置。
【請求項57】
前記非同期性事象は後期循環事象を含む、請求項34に記載の装置。
【請求項58】
前記非同期性事象は無効吸気努力事象を含む、請求項34に記載の装置。
【請求項59】
前記コントローラは、前記非同期性事象の発生に基づいて、前記呼吸治療を送達するための制御パラメータを自動的に変更するように構成される、請求項34に記載の装置。
【請求項60】
前記制御パラメータはトリガーしきい値を含む、請求項59に記載の装置。
【請求項61】
前記制御パラメータは循環しきい値を含む、請求項59に記載の装置。
【請求項62】
前記呼吸治療装置は人工呼吸器を含む、請求項34に記載の装置。
【請求項63】
前記プロセッサは、前記特徴集合が特徴の上位集合の部分集合を含むように該特徴集合の選択を制御するように更に構成され、
前記選択は、複数の呼吸治療装置で確立される複数の呼吸のデータにおいて生じる既知の非同期性事象のための前記上位集合の値を評価することを含む、請求項33に記載の装置。
【請求項64】
前記評価することは、パルツェン窓評価によって前記上位集合の値を用いて事後確率を計算することを含み、前記上位集合の値群は、値を繰返し包含及び除去することによって選択される、請求項63に記載の装置。
【請求項65】
同期した呼吸治療と呼吸サイクルとの間の非同期性を検出するためのシステムであって、
呼吸治療装置の使用からもたらされる1つ又は複数の圧力変換器信号から導出されるデータを処理する処理手段を備え、該処理手段は、(a)前記データから計算される検出値の特徴集合を1組のしきい値と比較し、(b)前記比較に基づいて、前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定するように構成される、システム。
【請求項66】
前記特徴集合が特徴の上位集合の部分集合を含むように該特徴集合を選択する分類手段を更に備え、
前記選択は、複数の呼吸治療装置によって確立される複数の呼吸のデータにおいて生じる既知の非同期性事象のための前記上位集合の値を評価することを含む、請求項65に記載のシステム。
【請求項67】
前記処理手段は、呼吸治療装置に結合された少なくとも1つのセンサの信号から導出されるデータを用いて前記特徴集合の検出値を計算するように更に構成される、請求項66に記載のシステム。
【請求項68】
前記検出値の特徴集合は、(a)呼吸数に基づく特徴、(b)呼吸量に基づく特徴、(c)呼吸機構に基づく特徴、(d)呼気流形態に基づく特徴からなる一群の特徴のうちの2つ以上の特徴を含む、請求項67に記載のシステム。
【請求項69】
前記非同期性事象の発生は、(a)無効呼気努力事象、(b)事後トリガー努力事象、(c)ダブルトリガー事象、(d)自動トリガー事象、(e)後期トリガー事象、(f)早期循環事象、及び(g)後期循環事象からなる一群の非同期性事象のうちの1つの非同期性事象を含む、請求項65に記載のシステム。
【請求項70】
呼吸可能ガスの流れを搬送するインターフェース手段と、
前記インターフェース手段と結合され、前記呼吸可能ガスを生成する流れ発生手段と、
前記圧力変換器信号を生成するための流れセンサと、
を更に備え、
前記処理手段は、前記流れ発生手段を制御して、同期した呼吸治療を提供するように更に構成される、請求項65に記載のシステム。
【請求項71】
前記同期した呼吸治療は呼吸支援換気である、請求項70に記載のシステム。
【請求項72】
プロセッサ可読情報を有する情報保持媒体であって、該プロセッサ可読情報は、同期した呼吸治療と呼吸サイクルとの間の非同期性を検出するための装置を制御し、該プロセッサ可読情報は、
前記呼吸治療装置と結合された少なくとも1つのセンサの信号から導出されるデータを用いて特徴集合の検出値にアクセスするための制御命令と、
前記検出値の特徴集合を1組のしきい値と比較するための制御命令と、
前記比較に基づいて前記呼吸治療装置と患者呼吸サイクルとの間の非同期性事象の発生を判定するための制御命令と、
を含む、情報保持媒体。
【請求項73】
流れ指標及び圧力指標に基づいて呼吸抵抗及びコンプライアンスを推定するための呼吸治療装置であって、
流れ及び圧力を表す信号を生成するための1つ又は複数のセンサと、
前記1つ又は複数のセンサと結合されたプロセッサであって、
前記流れ信号のデータから呼吸サイクルの呼気部分を検出することと、
前記検出された呼気部分に対応する流れ指標、圧力指標、及び体積指標を用いて、抵抗値及びコンプライアンス値を計算することと、
を制御するように構成される、プロセッサと、
を備える、呼吸治療装置。
【請求項74】
前記検出された呼気部分は、呼気サイクルにおいて開始し、該呼気サイクルの場合に吐出される一回換気量が約85パーセント〜90パーセントの範囲内の限度を超えるときに終了する、請求項73に記載の呼吸治療装置。
【請求項75】
前記計算は、前記流れ指標、前記圧力指標、及び前記体積指標を表すデータを用いる多重線形回帰過程を含む、請求項74に記載の呼吸治療装置。
【請求項76】
前記抵抗値及び前記コンプライアンス値は呼吸過程毎に計算される、請求項75に記載の呼吸治療装置。
【請求項77】
前記プロセッサは、前記求められた抵抗値及びコンプライアンス値の精度の評価を制御するように更に構成される、請求項74に記載の呼吸治療装置。
【請求項78】
前記精度の評価は、決定係数を計算すること、及び該決定係数をしきい値と比較することを含む、請求項77に記載の呼吸治療装置。
【請求項79】
前記プロセッサは、該プロセッサの前記計算によって求められた複数のコンプライアンス値に基づいて、PEEP制御パラメータを求めることを制御するように更に構成される、請求項73に記載の呼吸治療装置。
【請求項80】
前記プロセッサは、予め設定されたPEEP制御パラメータに対して繰り返される変更を制御し、その間に複数の圧力指標及び流れ指標が求められ、前記複数のコンプライアンス値は、該複数の圧力指標及び流れ指標に基づいて求められる、請求項79に記載の呼吸治療装置。
【請求項81】
前記PEEP制御パラメータを求めることは、前記複数のコンプライアンス値を表すデータから変曲点を検出することを含む、請求項80に記載の呼吸治療装置。
【請求項82】
前記プロセッサは、該プロセッサの前記計算によって求められた複数のコンプライアンス値に基づいて、最大圧支援限界を求めることを制御するように更に構成される、請求項73に記載の呼吸治療装置。
【請求項83】
前記プロセッサは、予め設定されたPEEP制御パラメータに対して繰り返される変更を制御し、その間に複数の圧力指標及び流れ指標が求められ、前記複数のコンプライアンス値は、前記複数の圧力指標及び流れ指標に基づいて求められる、請求項82に記載の呼吸治療装置。
【請求項84】
前記最大圧支援限界を求めることは、前記複数のコンプライアンス値を表すデータから変曲点を検出することを含む、請求項80に記載の呼吸治療装置。
【請求項85】
前記プロセッサと結合され、前記プロセッサからの制御信号に基づいて患者インターフェースに対して大気圧より高い圧力の呼吸可能ガスの流れを生成するための流れ発生器を更に含む、請求項76に記載の呼吸治療装置。
【図1】

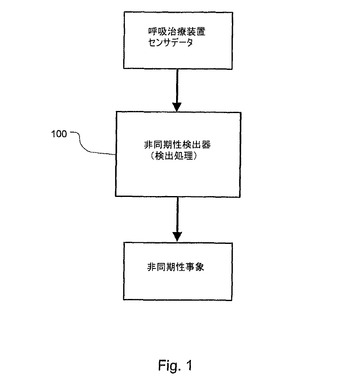
【図2】
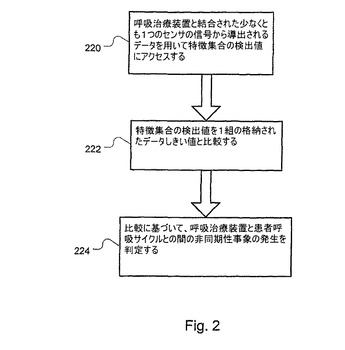
【図3】
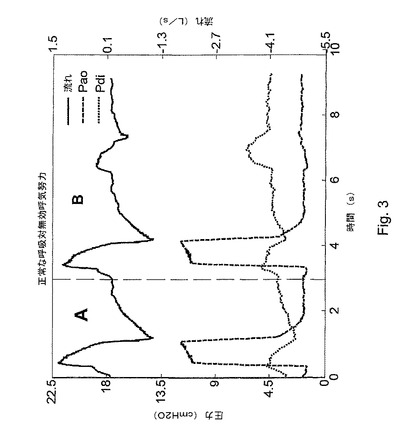
【図4】
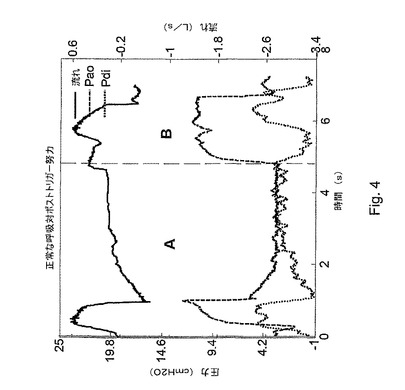
【図5】

【図6】
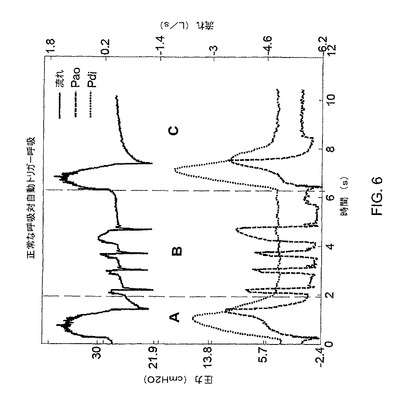
【図7】
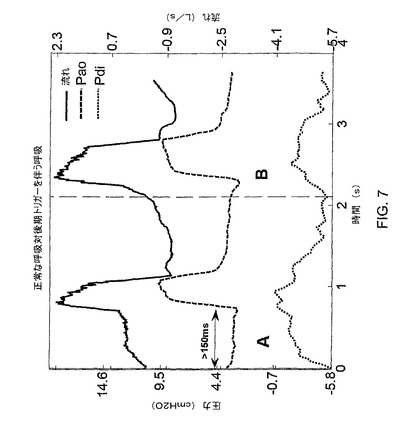
【図8】
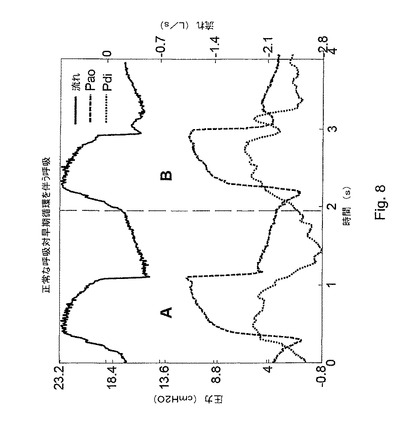
【図9】
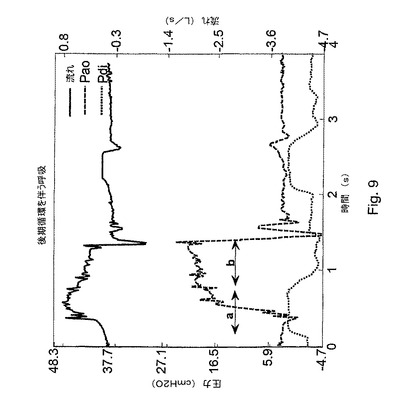
【図10】
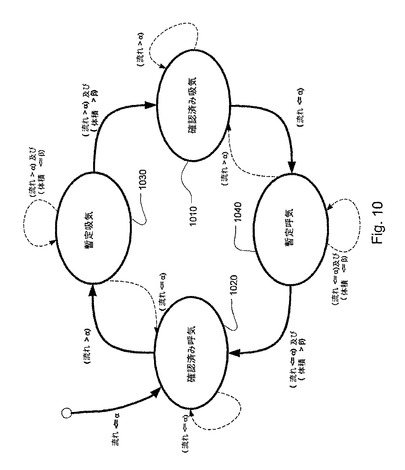
【図11】
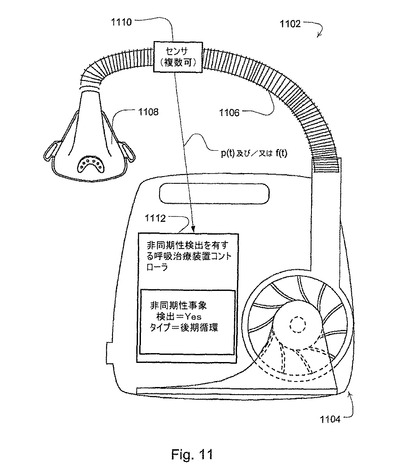
【図12】
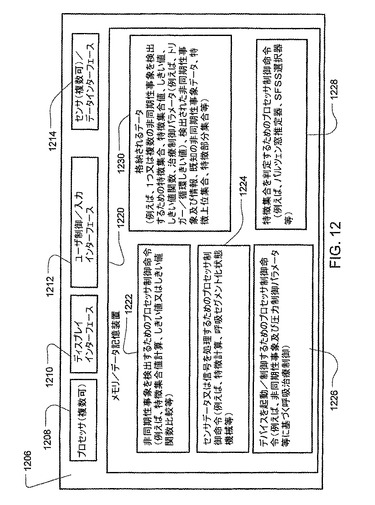
【図13】
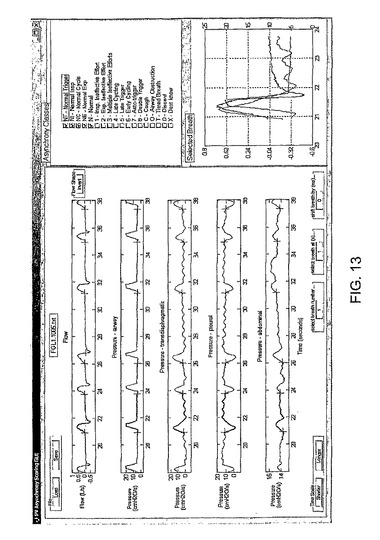
【図14】
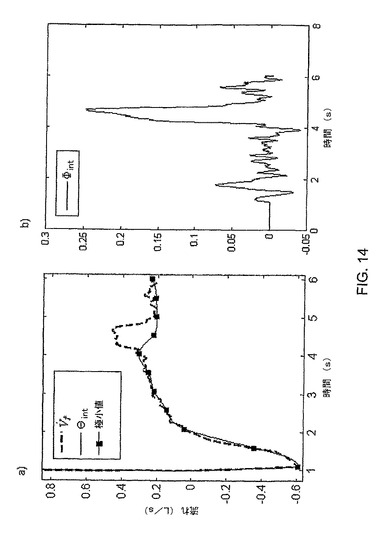
【図15】
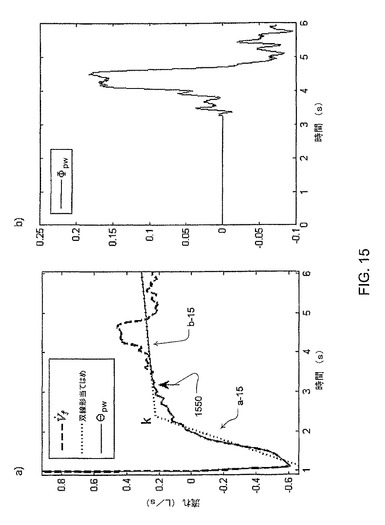
【図16】
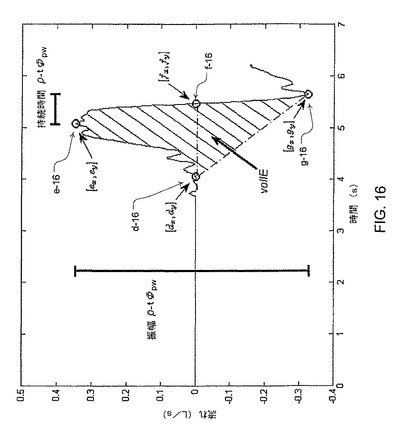
【図17】
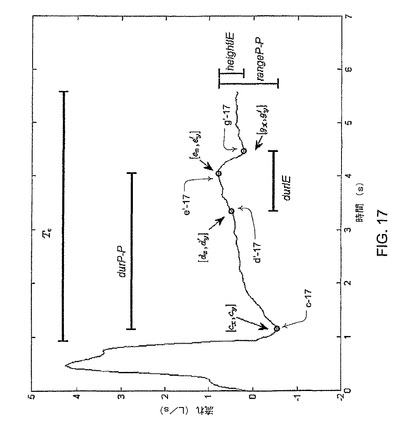
【図18】
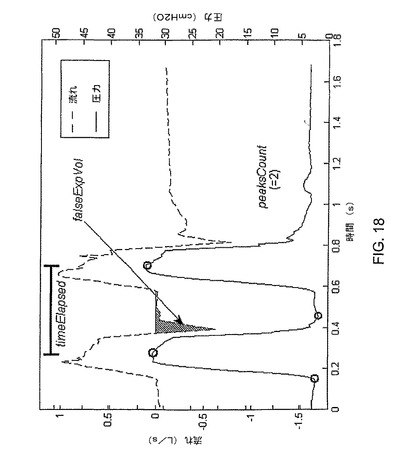
【図19】
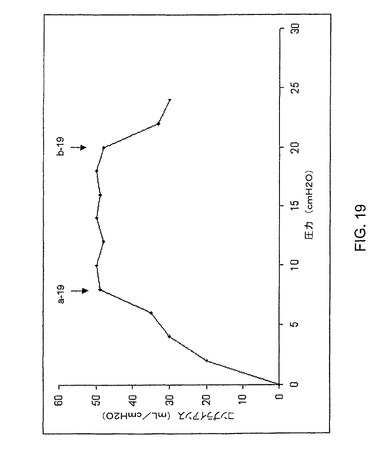
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公表番号】特表2012−524552(P2012−524552A)
【公表日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2012−506280(P2012−506280)
【出願日】平成22年4月22日(2010.4.22)
【国際出願番号】PCT/AU2010/000457
【国際公開番号】WO2010/121313
【国際公開日】平成22年10月28日(2010.10.28)
【出願人】(500046450)レスメド・リミテッド (192)
【氏名又は名称原語表記】RESMED LTD
【公表日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願日】平成22年4月22日(2010.4.22)
【国際出願番号】PCT/AU2010/000457
【国際公開番号】WO2010/121313
【国際公開日】平成22年10月28日(2010.10.28)
【出願人】(500046450)レスメド・リミテッド (192)
【氏名又は名称原語表記】RESMED LTD
[ Back to top ]