
駐車禁止エリア報知装置及びプログラム
【課題】 駐車禁止エリアである旨の報知(警告)が頻繁になされ、ユーザに煩わしさを与えてしまうことを防止するとともに、従来よりも適切なタイミングで駐車禁止エリアである旨の報知を行うこと
【解決手段】 車両の位置を検出するGPS受信機8と、駐車禁止位置に関する情報を記憶するデータベース19と、車両の位置と駐車禁止位置に関する情報とにより、駐車禁止エリアである旨の報知を行うか否かの決定を行い表示部5,スピーカ20による報知動作を制御する制御部18を備える。制御部は、GPS受信機の出力から車速を検出する機能を持ち、駐車禁止エリア内へ当該車両が進入した際の車速が、所定の車速以上の場合に駐車禁止エリアである旨の報知を抑制し、所定の車速未満の場合に前記駐車禁止エリアである旨の報知を行うように構成した。
【解決手段】 車両の位置を検出するGPS受信機8と、駐車禁止位置に関する情報を記憶するデータベース19と、車両の位置と駐車禁止位置に関する情報とにより、駐車禁止エリアである旨の報知を行うか否かの決定を行い表示部5,スピーカ20による報知動作を制御する制御部18を備える。制御部は、GPS受信機の出力から車速を検出する機能を持ち、駐車禁止エリア内へ当該車両が進入した際の車速が、所定の車速以上の場合に駐車禁止エリアである旨の報知を抑制し、所定の車速未満の場合に前記駐車禁止エリアである旨の報知を行うように構成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駐車禁止エリア報知装置に関するものである。
【背景技術】
【0002】
従来、車両速度測定装置から送出されるマイクロ波を検知して報知したり、車両速度測定装置の位置情報を記憶保持しておき、GPSにより検出した自車の位置と車両速度測定装置との位置とが所定の関係になった場合に警報を発したりするレーダー探知機がある。このレーダー探知機の付加機能として、駐車禁止エリアに自車が通りかかった際に、例えば「この付近、駐車禁止エリアです」といった音声や表示により報知(警告)を行う機能を有するものが知られている。
【0003】
このような機器では、自車の現在位置を検出し、検出した現在位置が予め記憶された駐車禁止地点から所定の距離内かどうかを検索し、駐車禁止地点から所定の距離内である場合に、自車の現在位置が駐車禁止エリアであることを報知している。こうした報知を行うことにより、ユーザは駐車禁止エリアであることをあらかじめ知ることができるので、例えば運転者が駐車禁止の標識を見落としていたり、標識が設置されていなかったりして、うっかり路上に駐車してしまったりすることを防止することができ、交通秩序の維持に貢献している。
【0004】
ところが、こうした機器では、駐車禁止エリアにさしかかると常に報知がなされるため、駐車する意思のない運転者にとっては、煩わしく感じることがある。特に駐車禁止エリアの集中している地域では駐車する意志に関係なく頻繁に警告されることになりとても迷惑に感じるという問題がある。
一方、特許文献1に開示された車両用駐車違反抑止装置は、車速が零であり、且つ、オートマチックトランスミッションがPレンジであり、且つ、パーキングブレーキが引かれていることをもって、車両が駐車することを判断し、この判断がなされた場合に、自車位置と道路地図データから駐車禁止区域にあるかを判定し、駐車禁止区域にある場合にはその旨をドライバに報知するものである。この特許文献1に開示された発明では、走行中は、駐車禁止区域であることが報知されないので、上記の問題は生じない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−199185
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の装置では、ユーザは、車を路肩に完全に止めた状態でないと、その場所が駐車禁止区域であるか否かを知ることができない。このように、いわば、すでに駐車の準備(体制)が完了し、まさにエンジンを切ろうとする段階でドライバに対して駐車禁止区域であることを報知するため、運転者にとってはもっと早く報知してほしいという要求があった。
【0007】
また、このように車速が零であり、且つ、オートマチックトランスミッションがPレンジであり、且つ、パーキングブレーキが引かれている状態から、エンジンが切られ、装置への電源供給が遮断されるまでの時間が短く、駐車禁止区域にある旨の報知がなされる前に装置への電源が遮断されてしまい、適切な報知がなされないという問題があった。
【0008】
このように先行文献1に開示された技術では駐車禁止区域である旨の報知のタイミングも遅すぎるという問題がある。
【0009】
また例えば駐車場が道路の近傍にある場合など、実際には駐車禁止区域でない場所にもかかわらず駐車禁止区域と判定されている場合に、その場所に駐車しておいた車のエンジンを始動させると、エンジン始動時(あるいはACCON時)に駐車禁止区域である旨の報知がなされてしまうという問題がある。特に駐車禁止区域の道路の近傍に駐車場がある利用者は、毎度エンジンをかけるたびにこの報知がなされてしまい大変煩わしい。さらに、オートマチックトランスミッションがPレンジであることや、パーキングブレーキの信号を装置と接続する必要があるため設置作業が繁雑となる。
【0010】
本発明は、駐車禁止エリアである旨の報知(警告)が頻繁になされ、ユーザに煩わしさを与えてしまうことを防止するとともに、従来よりも適切なタイミングで駐車禁止エリアである旨の報知を行うことのできる駐車禁止エリア報知装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上述した目的を達成するために、本発明に係る駐車禁止エリア報知装置は、(1)車両の位置を検出する位置検出手段と、駐車禁止位置に関する情報を記憶する記憶手段と、前記位置検出手段によって検出された車両の位置と前記記憶手段に記憶された駐車禁止位置に関する情報とにより、駐車禁止エリアか否かの判断に基づいて駐車禁止エリアである旨の報知を行う報知手段と、を備える駐車禁止エリア報知装置において、当該車両の速度を検出する車速検出手段を備え、前記報知手段は、前記駐車禁止エリア内へ当該車両が進入した際の前記車速検出手段によって検出された車速が、所定の車速以上の場合に前記駐車禁止エリアである旨の報知を抑制し、所定の車速未満の場合に前記駐車禁止エリアである旨の報知を行うように構成した。
【0012】
なお、「報知を抑制する」とは、例えば、報知を行わないことや、報知を目立たなくすることを含む。所定の車速とは、駐車する意図があると思われる車速と、駐車する意図がないと思われる車速の間の車速とする。所定の車速は、例えば20km/h程度とするとよい。なお、この所定の車速をユーザが設定するための所定車速設定手段を設け、所定車速設定手段によって設定された車速を所定の車速とするとよい。
【0013】
さらに、車速検出手段は、具体的な走行速度を検出するものに限ることはなく、車速に応じた値を検出し、出力できるものでもよい。たとえば、振動センサを用いることができる。走行条件が同じ場合、一般的に、走行速度が速くなるほど、振動も大きくなる傾向にある。従って、所定の車速に対応する振動センサの出力値を基準値として設定しておき、振動センサの出力値が基準値以上の場合には報知を抑制し、基準値未満の場合には報知をするように構成できる。
【0014】
さらにまた、車速検出手段は、具体的なセンサ・測定装置を別途設けるものに限ることはなく、たとえば、位置検出手段による車両の位置情報と、経過時間情報を利用して車速を算出するようにしてもよい。
【0015】
この発明によれば、駐車禁止エリアに進入した際の車速が所定の車速以上である場合には、駐車禁止エリアである旨の報知が抑制され、所定の車速未満の場合に前記駐車禁止エリアである旨の報知がされる。よって、駐車する意図がないと思われる速度で走行中に駐車禁止エリアに入った場合に、駐車禁止エリアである旨の報知が抑制されるため、ユーザに報知に伴う煩わしさを与えてしまうことを防止することができる。
【0016】
(2)前記報知手段は、音によって報知を行う音報知手段と、光によって報知を行う光報知手段とを備え、前記報知の抑制は、前記音報知手段による音の報知のみ行い、光報知手段による報知に対しては抑制を行なわずに報知するようにした。走行中でも駐車禁止エリアを知りたい場合があるが、ユーザは、光による報知によって現在位置が駐車禁止エリアか否かを知ることができる。
【0017】
(3)前記報知手段は、前記駐車禁止エリアである旨の報知を抑制した場合であって、前記駐車禁止エリア内に当該車両がある場合において、前記車速が所定の車速より小さくなった場合には、前記駐車禁止エリアである旨の報知を行うようにするとよい。このようにすれば、駐車禁止エリアへの進入時の車速が所定の車速以上であって、駐車禁止エリア内に入った際には駐車禁止エリアである旨の報知が抑制されていた場合であっても、その後の車両の速度の低下に応じて、適切と想定されるタイミングで駐車禁止エリアである旨の報知を行うことができる。
【0018】
(4)自己の起動を検知する起動検知手段を備え、前記報知手段は、起動検知手段によって自己の起動が検知された場合に前記駐車禁止エリアにある場合には、前記駐車禁止エリアである旨の報知を抑制するように構成するとよい。ここで、自己の起動とは、例えば、駐車禁止エリア報知装置自体への電源が投入された場合や当該装置にリセットがかかった場合等を意味する。このようにすれば、例えば駐車場が駐車禁止エリアの近傍にある場合など、実際には駐車禁止エリアでない場所にもかかわらず駐車禁止エリアと判定されている場合に、その場所に駐車しておいた車のエンジンを始動させた際に、報知が抑制されることとなるため、エンジンをかけるたびにこの報知がなされてしまう煩わしさをなくすことができる。
【0019】
(5)当該車両の走行路が渋滞状態であるか否かを推定する渋滞状態推定手段を備え、前記渋滞状態推定手段によって推定された渋滞状態が所定の渋滞状態である場合には、前記所定の車速未満であっても駐車禁止エリアである旨の報知を抑制するようにするとよい。
【0020】
渋滞状況推定手段は、例えばVICSのように車両外から渋滞情報を受信する構成としてもよいが、特に車速検出手段によって検出された車速に基づいて推定する構成にするとコストがかからずよい。この構成の場合、所定の渋滞状態であるとの推定は、例えば、駐車禁止エリアへの進入の前の所定時間(例えば3分間)の速度が所定値以下(例えば20分以下)である場合に渋滞であると判定することで行うとよい。なお、この渋滞か否かの判定を速度で行う場合には、所定の渋滞状態であるか否かの判定基準(しきい値速度)は、報知の抑制を行うか否かの判定基準(しきい値速度)と同じにしてもよいし、異ならせてもよい。また、速度で判定する場合には、コストの面から考えると、渋滞状況推定手段は車速検出手段の出力を利用するのが好ましいが、別のセンサ等を設け、そのセンサ出力に基づいて判断するようにしてもよい。
【0021】
係る構成にすれば、渋滞状態であると推定された場合には、駐車禁止エリアである旨の報知を行わないので、駐車禁止エリアである旨の報知(警告)が頻繁になされ、ユーザに煩わしさを与えてしまうことを防止することができる。
【0022】
(6)駐車場位置に関する情報を記憶する駐車場情報記憶手段を備え、前記報知手段は、駐車禁止エリアである旨の報知を行った後、前記現在位置検出手段によって検出された現在位置及び前記駐車場位置に関する情報に基づき駐車場位置に関する情報を報知するようにするとよい。
【0023】
駐車禁止エリアである旨の報知がなされた場合に、その後、駐車できる場所を探すのは、ユーザ自身が行う必要があった。しかし、このようにすれば、路上に駐車しようとしているユーザに対して駐車場位置を知らせることができるので、駐車場を探すために無駄な走行をすることを抑止でき、時間短縮・省エネ等の効果が発揮する。
【0024】
(7)前記駐車禁止位置に関する情報には、駐車禁止エリアの重要度を特定する情報が関連付けられており、前記報知手段は、前記重要度に応じて異なる報知態様で報知するようにするとよい。重要度は、例えば、重点的に監視するエリアか否かの程度を特定するもので、一例を挙げると、“a.駐車禁止監視最重点エリア”、“b.駐車禁止監視重点エリア”、“c.駐車禁止監視エリア”の3段階とすると、より重点的に監視される対象エリアとなるaが最も重要度高く、以下、b→cの順に重要度が低くなるように設定される。もちろん、段階分けは、このように3段階に分けるものに限らず、2段階或いは4段階以上としても良い。重要度に応じた報知をすることで、例えば、重要度が高いものは音声と表示部の両方を用いて報知し、重要度が低いものは表示部のみの報知としたり、報知をしないなどとしたりすることで、音声による報知が頻繁に発生することが抑制され、ユーザにとって、音声出力の煩わしさをなくすことができるとともに、駐車禁止エリアを的確に知らせることができる。
【0025】
(8)緊急車両を検出する緊急車両検出手段を備え、前記報知制御手段は、前記駐車禁止エリア内において、前記緊急車両検出手段によって緊急車両が検出された場合には、前記報知を抑制している状態であっても、前記駐車禁止エリアである旨の報知を行うことようにすることができる。このようにすれば、緊急車両の妨げになるような駐車を防止することに貢献できる。
【0026】
緊急車両検出手段は、例えば、カーローケーションシステムのように緊急車両から発せられる緊急車両の位置をセンターに対して通知するための電波を受信することで緊急車両を検出することができる。また、電波を利用する場合、このようにカーローケーションシステムにおける緊急車両が出射される電波に限られることはなく、緊急車両から出射され、一般車両と区別することができる電波であれば良い。そして、電波を利用する場合には、例えば、緊急車両の発する電波を検出する電波検出手段を備え、前記報知手段は、前記駐車禁止エリア内において、前記電波検出手段によって緊急車両の発する電波が受信された場合には、前記報知を抑制している状態であっても、前記駐車禁止エリアである旨の報知を行うように構成することもできる。さらには、検出する方法は、電波に限るものでもない。すなわち、例えば緊急車両検出手段は、緊急車両が緊急走行時に発する音をマイク等で検知し、検知した当該音が所定の音量レベル以上のときに緊急車両を検知したものとしてもよく、その他各種の方式がとれる。
【発明の効果】
【0027】
本発明では、駐車禁止エリアである旨の報知(警告)が頻繁になされ、ユーザに煩わしさを与えてしまうことを防止するとともに、従来よりも適切なタイミングで駐車禁止エリアである旨の報知を行うことができる。
【図面の簡単な説明】
【0028】
【図1】本発明の好適な一実施形態を示す図である。
【図2】本実施形態のブロック図を示す図である。
【図3】表示部の表示態様の一例を示す図である。
【図4】表示部の表示態様の一例を示す図である。
【図5】動作の一例を説明する図である。
【図6】制御部の機能を示すフローチャートである。
【図7】本実施形態の作用を説明するための車速の変化の一例を示す図である。
【発明を実施するための形態】
【0029】
図1,図2は、本発明の好適な一実施の形態を示している。本実施形態の駐車禁止エリア報知装置は、検出した現在の位置情報と記憶した目標物の位置情報等とから所定の位置関係にある目標物を検出し、報知する目標物検出装置の一機能として組み込んでいる。
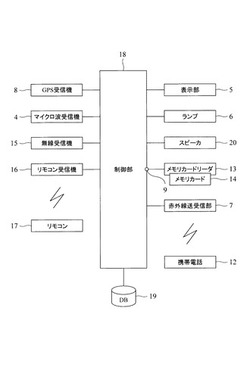
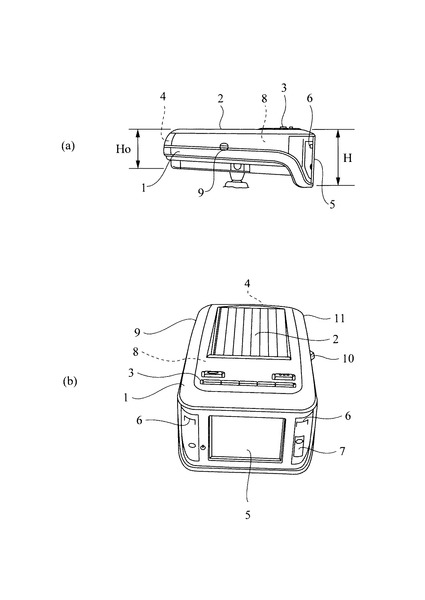
駐車禁止エリア報知装置を実装した目標物検出装置は、図1に示すように、ケース本体1の上面にソーラーパネル2並びにスイッチ部3を配置し、ケース本体1の前面側内部にマイクロ波受信機4を配置し、ケース本体1の後面に表示部5と警報ランプ6と赤外線送受信部7とを配置している。また、ケース本体1の上面側内部には、GPS受信機8を配置する。さらに、ケース本体1の一方の側面には、アダプタージャック9を配置し、他方の側面には電源スイッチ10並びにDCジャック11を配置する。また、ケース本体1内には、スピーカも内蔵されている。
【0030】
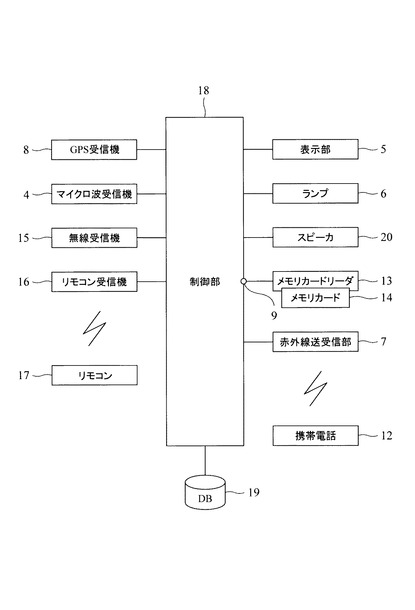
図2に示すように、赤外線送受信部7は携帯電話機12等の赤外線送受信機を内蔵した通信装置との間でデータの送受を行なう。アダプタージャック9は、メモリカードリーダ13を接続する端子である。アダプタージャック9にメモリカードリーダ13を接続することで、そのメモリカードリーダ13に装着されたメモリカード14に格納されたデータを内部に取り込むことができる。より具体的には、メモリカード14に格納されたデータは、新規な目標物の情報(経度・緯度を含む位置情報,種別情報等)などの更新情報があり、その更新情報が制御部18経由で目標物検出装置に内蔵されるデータベース19に格納(ダウンロード)され、データ更新がされる。データベース19は、制御部18のマイコン内あるいはマイコンに外付けした不揮発性メモリ(たとえばEEPROM)により実現できる。なお、データベース19には、出荷時に一定の目標物に関する情報が登録されており、その後に追加された目標物についてのデータ等が上記のようにしてデータ更新される。また、データ更新は、赤外線送受信部7を介して行なうこともできる。
【0031】
DCジャック11は、図示省略のシガープラグコードを接続するためのもので、そのシガープラグコードを介して車両のシガーソケットに接続して電源供給を受け得るようにする。更に、本実施形態の目標物検出装置は、無線受信機15とリモコン受信機16を備えている。無線受信機15は、飛来する所定周波数の無線を受信する。リモコン受信機16は、リモコン(携帯機:子機)17とデータ通信をし、目標物検出装置に対する各種の設定を行なう。また、スイッチ部3も制御部18に接続され(図示省略)、リモコン17と同様の設定を行えるようになっている。
【0032】
そして、制御部18は、上記の各種の入力機器(受信機,通信機等)から入力される情報に基づき所定の処理を実行し、出力機器(表示部5,警報ランプ6,スピーカ20等)を利用して所定の警報・メッセージを出力する。これらの基本機能を簡単に説明すると、以下の通りである。
【0033】
まず、本実施形態では、表示部5の寸法形状を従来よりも大きくしている(特に高さ方向を広げている)。これに伴い、表示部5を実装するケース本体1の後方側の高さHを、その他の部位の高さH0よりも十分に大きくしている。この表示部5は、たとえば、有機ELディスプレイや液晶ディスプレイを用いて実現される。
【0034】
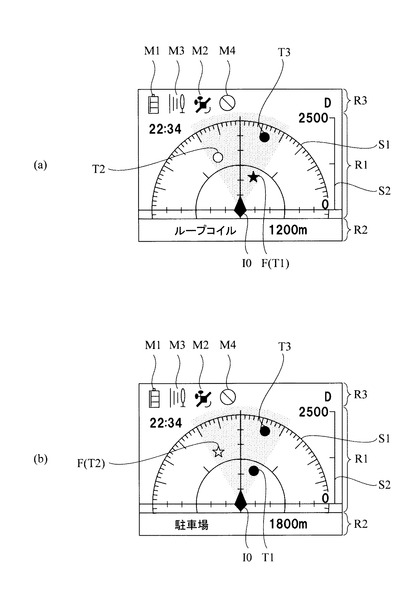
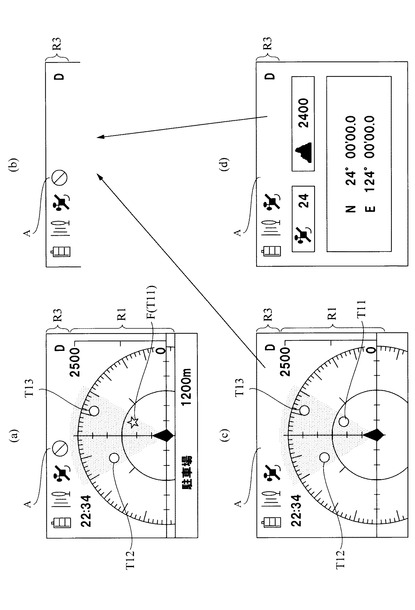
図3に示すように、表示部5は、その大部分を占めるメイン表示領域R1と、下端側に配置されたメッセージ表示領域R2と、上端側に配置されたアイコン表示領域R3と、を備えている。アイコン表示領域R3は、バッテリ残量を示すアイコンM1や、GPSの受信中を示すアイコンM2や、マイクロ波受信中を示すアイコンM3などの動作状態を示すアイコンや、現在位置の周囲が駐車禁止エリアであることを示す駐車禁止アイコンM4のように周囲の状態・情報を放置するアイコンなどを表示する。係る表示は、制御部18からの制御命令により出力される。
【0035】
表示部5における表示内容について説明しつつ、警報機能を説明する。メッセージ表示領域R2は、所定の目標物の種類を特定する名称(図3(a)では、“ループコイル”)と、当該目標物までの距離(図3(a)では、“1200m”)を表示する。後述するように、この領域R2に表示された目標物がターゲット表示領域R1に表されている場合、その表示された警報対象アイコンは、他の警報対象アイコンと区別できる態様で描画している。
【0036】
メイン表示領域R1は、主として目標物(ターゲット)と自車との位置関係を示すためのもので、複数の目標物を表示可能となっている。自車と目標物とは、共にアイコンで示している。自車は、略菱形で形成される自車進行アイコンI0で示す。この自車進行アイコンI0を中心とした所定半径(切替可)からなる円の範囲内に存在する目標物(ターゲット)が、その存在位置にターゲットアイコンとして表示される。
【0037】
更に、メイン表示領域R1における表示画面は、自車の進行方向を上に見た状態で表示する。これは、GPS受信機8から与えられる自車の位置情報に基づき、制御部18が自車の進行方向を求め、その進行方向が上に向いた状態での各目標物の位置を求め、円形の表示領域内に存在するものを該当する位置に表示することで対応できる。
【0038】
目標物は、所定形状(丸形或いは星形)のターゲットアイコンTnで示している。このターゲットアイコンTnの中には、自車との位置関係から、警報対象となる目標物を示す警報対象アイコンと、警報対象と成らない目標物を示す警報対象外アイコンがある。ここで警報対象とは、自車の進行方向より前(進行方向より±90°)にあるターゲットであり、且つ、マイクロ波を発する速度計測装置などの警報角度があるターゲットについては、さらに警報対象角度内(ターゲットの警報角度±40°)の条件を具備するものである。
【0039】
警報対象外アイコンは、アイコン色を灰色としている。また、警報対象アイコンは、警報の対象となるターゲット(目標物)を表すアイコンであり、緊急度(重要度)に応じて色分けをしている。色分けの一例としては、
緊急度大:赤色
緊急度中:黄色
緊急度小:緑色
の3種類としている。
【0040】
緊急度が大の目標物としては、例えばループコイル等の車両速度計測装置がある。緊急度が中の目標物としては、例えば警察署などがある。緊急度が小の目標物としては、例えば、高速道路におけるサービスエリアや、一般道路脇に設置される道の駅などの交通に関係する場所や、Nシステムなどの車両速度計測装置以外の監視装置等などがある。緊急度が小の目標物としては、駐車場などがある。
【0041】
これにより、丸形のターゲットアイコンは、最大4色に色分けされて表示されることになる。なお、設定により表示/非表示とする目標物の種類を切り替えることができる。係る切り替え設定は、スイッチ部3或いはリモコン17を操作して行なう。
【0042】
データベース19には、目標物の種類と、位置情報と、緊急度と、監視方向(ある場合)などを関連付けたテーブル構造となっている。さらに、有効/無効フラグを関連付け、当該フラグがONのもののみを表示するように設定するとよい。
【0043】
更に、複数ターゲットを表示するに際し、ターゲットの重要度(優先度)の高いものを前面側に描画するようにしている。これは、GPS受信機8から与えられる自車位置情報(経度・緯度)と、現在の円形の表示領域の半径情報(或いは最大半径)と、を取得するとともに、データベース19にアクセスし、現在位置と目標物までの距離が取得した半径よりも短いものを抽出し、車両の進行方向との関係からメイン表示領域R1における表示位置を特定する。更に、表示対象となった目標物の重要度を求め、重要度の低いものから順に所定色のターゲットアイコンを描画する。これにより、複数のターゲットアイコン同士の一部又は全部が重なった場合、後で描画される重要度の高いターゲットのターゲットアイコンを描画するに際し、すでに描画された重要度の低いアイコンとかなさる部分は、現在描画中の重要度の高いターゲットアイコンが上書きで描画されることから、ターゲットの重要度(優先度)の高いものが前面側に描画されるようになる。
【0044】
更に本実施形態では、ターゲットアイコンのうち、条件を具備する1つのアイコンをフォーカスアイコンFとし、他の円形のターゲットアイコンと異なる表示態様で描画する。このフォーカスアイコンは、フォーカスが当たっているターゲット(フォーカスターゲット)を表すアイコンである。異なる表示態様としては、たとえば形状を異ならせたり(たとえば星形)、点滅させたりすることなどがある。アイコン色は対応するターゲットアイコンにおけるアイコン色と同じにする。
【0045】
具体的には、フォーカスアイコンは、現在警報中、或いは警報中ではないが警報対象ターゲットが画面内に存在している、又はユーザが選択したターゲットを指す。上述の通り、フォーカスターゲットのアイコンは、フォーカスアイコンとなって、ブリンキング(点滅)する。そして、制御部18は、画面最下段のメッセージ表示領域R2に対して、そのフォーカスターゲットについての情報、具体的には、ターゲット名(種類名)と、そのターゲット(目標物)までの距離と、を表示する。
【0046】
換言すると、メッセージ表示領域R2にメッセージが表示されている場合、そのメッセージに対応するターゲットアイコンがメイン表示領域R1に表示されていると、当該ターゲットアイコンがフォーカスアイコンとなり、表示態様が切り替わる(星形&ブリンキング)。
【0047】
つまり、フォーカスターゲットは、自車とターゲット(目標物)が一定の関係になり、報知タイミングになった場合に自動的に選択されて表示が切り替わる場合と、ユーザのマニュアル操作(スイッチ部3またはリモコン17の操作)によりフォーカスターゲットを切り替える場合がある。また、ユーザ操作に伴うフォーカスターゲットの切替は、スイッチ部3或いはリモコン17に設けた所定のスイッチを押下することで、現在フォーカスが当たっているターゲットから、次に遠い/近いターゲットをフォーカスターゲットに切り替える。なお、フォーカスが当たっていない場合に、この操作(所定のスイッチの押下)を行うと、警報の対象内外に関係なく、自車位置から最も近いターゲット(ターゲットアイコン)をフォーカスターゲット(フォーカスアイコン)にする。
【0048】
具体的には、警報画面においては、基準となるターゲットフォーカスは自車位置から最も近い警報対象であるので、図3(a)に示すように、制御部18は、ターゲットアイコンT1がフォーカスアイコンFになり、当該アイコンを星形でブリンキングさせるとともに、そのフォーカスアイコンFの情報(ターゲット名:ループコイル,距離:1200m)をメッセージ表示領域R2に表示させる。
【0049】
この状態で、ユーザが所定のスイッチの押下操作による最近/最遠フォーカス操作を行うと、制御部18は、現在のフォーカスターゲットから最近/最遠のターゲットをフォーカスターゲットとし、図3(b)に示すように(この例では、最近のターゲットが選択)該当するターゲットアイコンT2がフォーカスアイコンFとなり、星形でブリンキングさせるとともに、そのフォーカスアイコンFの情報(ターゲット名:駐車場,距離:1800m)をメッセージ表示領域R2に表示させる。
なお、ユーザの操作により強制的にフォーカスターゲットが設定された場合、その状態で一定時間(例えば、10秒)経過したならば、基の状態に復帰させる。
【0050】
また、自車位置と目標物の距離が所定の距離になるなどの警報条件中となったターゲット(警報中対象)が存在しない場合には、たとえば図4(c)に示すような待ち受け画面となり、メッセージ表示領域R2に表示すべき情報がないので、メッセージ表示領域の分までメイン表示領域R1となり、3つのターゲットアイコンT11〜T13が表示される。この状態で、ユーザが所定のスイッチの押下操作による最近/最遠フォーカス操作を行うと、制御部18は、自車位置から最近/最遠のターゲットをフォーカスターゲットとし、図4(a)に示すように(この例では、最近のターゲットが選択)該当するターゲットアイコンT1がフォーカスアイコンFとなり、星形でブリンキングさせるとともに、そのフォーカスアイコンFの情報(ターゲット名:駐車場,距離:1200m)をメッセージ表示領域R2に表示させる。なお、制御部18は、GPS受信機から与えられる自車位置情報と、データベース19に格納された各ターゲットの位置情報とに基づき、各ターゲットまでの距離を算出することで、最近/最遠のターゲットを抽出することができる。
【0051】
なお、図3は、制御部18が、GPS位置情報に基づく警報や、マイクロ波の受信などの警報条件を満たしたと判断した場合に表示する警報画面の一例を示しており、図4は係る警報条件を具備しない場合の待ち受け状態の画面(待ち受け画面)の一例を示している。警報画面と待ち受け画面について、それぞれ画面を用いるかは、例えば、制御部18が、ユーザによるリモコン17の操作によって設定された設定内容を、制御部18の不揮発性メモリに記憶しておき、当該情報に基づき制御部18は所定の表示形態で表示する。
【0052】
複数のターゲットアイコンの位置情報と、自車の位置情報を2次元空間上で表示可能とする表示形態は、GPS位置情報に基づく警報や、マイクロ波の受信などの警報情報を具備しない待ち受け状態の画面(待ち受け画面:図4(a),(c))と、実際の警報画面(図3)のいずれにも適用できる。さらに、警報時には、上記の2次元空間上で複数のターゲット位置を報知するものでなく、従来のように文字等のメッセージを出力表示するようにしてもよい。このようにした場合、表示画面が大きいことから、ユーザに対して何の警報であるかを確実に通知することができる。また、待ち受け画面を図4(d)に示すように、ターゲットアイコンを表示しないイラスト画面(図では、衛星数(24個),自車の位置情報(軽度,緯度,高度)を文字列で表示するようにしてもよい。
【0053】
待ち受け画面並びに警報画面は、図示したパターンに限ることはなく、その他のパターンを用意するのを妨げない。そして、待ち受け時と警報時にどのパターンを用いるかは、リモコン17,スイッチ部3の操作によりユーザが選択する。すなわち、制御部18が、表示部5に対し、待ち受け時と警報時にどのパターンを用いるかを選択する画面を表示させる。制御部18は、ユーザによるリモコン17またはスイッチ部3の操作による選択状態を検出し、その選択状態に基づき、それぞれの場合についてどのパターンを用いるかを制御部18の不揮発性メモリに記憶しておく。そして、制御部18は、記憶されたパターンにもとづき、待ち受け時には待ち受け時用に記憶されたパターンの表示を行い、警報時には警報時用に記憶されたパターンの表示を行う。
【0054】
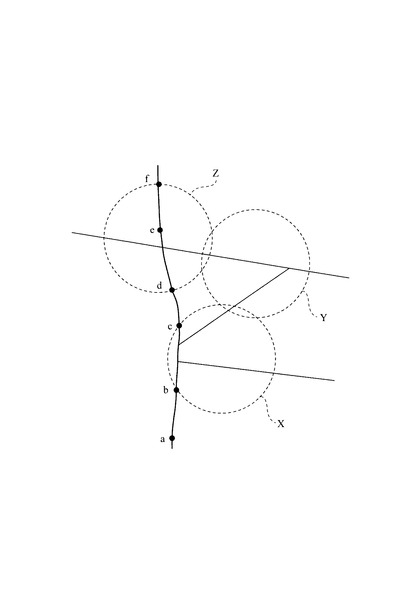
次に、目標物検出装置に実装された駐車禁止エリア報知装置の機能を説明する。まず、記憶手段あるデータベース19には、実際の駐車禁止エリアを円領域で近似したデータを格納する。例えば、図5の破線で示すように、駐車禁止エリアを円領域の組み合わせで構成する。すなわち、円の半径を例えば200mとし、円の中心点の緯度経度に対応する座標データを地図データベース19に記憶しておく。本実施形態では、半径の長さを固定としたため、個々の駐車禁止エリアの領域を特定する情報としては、最低限、円の中心点の緯度経度情報のみが記憶されればよいが、適宜半径を変えられるように設定にした場合には、個々の駐車禁止エリアごとにその円の中心点の緯度経度情報と半径とを関連づけて記憶する。
【0055】
また、位置検出手段は、GPS受信機8により実現し、報知手段は、表示部5,ランプ6,スピーカ20等により実現される。このように、目標物検出装置が元々備えている機器を兼用している。車速は、GPS受信機8にて取得するGPS情報に基づいて、制御部18が演算処理して求める。車速検出手段は、GPS受信機8及び制御部18により実現される。なお、車速を求めるためには、移動距離と移動時間とから算出できるが、移動距離は複数地点の位置情報の差分データから求めることができ、移動時間はたとえば内蔵するタイマ・内部時計から求めたり、GPS情報として送られてくる時刻情報を利用して求めたりすることができる。
【0056】
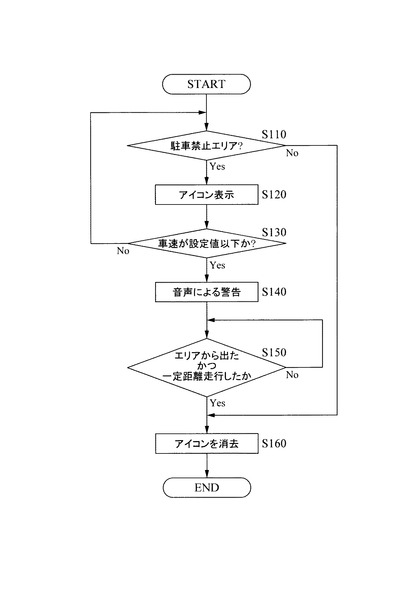
そして、報知制御手段たる制御部18は、図6に示す処理を行なう。すなわち、GPS受信機8で受信したデータに基づき算出した車両の現在位置が駐車禁止エリア内であるか否かを判定する(S110)。車両の現在位置が駐車禁止エリア内でない場合には、処理ステップS160へ移行する。一方、車両の現在位置が駐車禁止エリア内である場合には(S110:Yes)、処理ステップS120へ移行する。
【0057】
処理ステップS120では、駐車禁止エリア内であることを示す駐車禁止アイコン(駐車禁止マークに似せたマーク)M4を表示する。つまり、駐車禁止アイコンが表示されていない場合(図4(c),(d)参照)、駐車禁止アイコンを表示部5のアイコン表示領域R3内の所定の表示箇所Aに表示する(図4(b)参照)。すでに駐車禁止アイコンを表示中の場合(図3,図4(a)参照)には、その駐車禁止アイコンを表示したままにする。
【0058】
続く処理ステップS130では、GPS受信機8で受信したデータに基づき算出した車速が、設定値以下であるか否かを判定する。この設定値は前述のユーザによる設定内容として不揮発性メモリに記憶されている。なお、当該設定のデフォルト値は20km/hとしている。車速が設置値より大きい場合には(S130:No)、S110へ戻る。よって、駐車禁止アイコンの表示のみで報知する。
【0059】
一方、車速が設置値以下の場合には(S130:Yes)、処理ステップS140へ移行する。この処理ステップS140では、制御部18の有する音声合成機能により、スピーカ20から「この付近駐車禁止エリアです」と音声を出力する。このように、車速が設定値以下の場合には、運転者はそのまま停車し、駐車しようとしている可能性が高いので、アイコン表示に加えて音声による報知を行うことで、その一体が駐車禁止エリアであることを確実に伝え、誤って駐車禁止エリアに駐車してしまうことを未然に抑止できる。
【0060】
続く処理ステップS150では、車両の現在位置がS110で入ったと判定された駐車禁止エリアから出ており、かつ、当該駐車禁止エリアに入ってから一定距離走行したか否かを条件判定する。この一定距離は、S140での音声の出力があってから、ユーザが煩わしさを感じない時間を走行すると想定される距離に設定する。例えば、この一定距離は700mに設定する。なお、本実施形態では一定距離としているが報知されて煩わしさを感じない程度の時間(一定時間、例えば3分など)としてもよい。
【0061】
この条件が満たされない場合には(S150:No)、S150へ戻る。一方、この条件が満たされたならば(S150:Yes)、S160へ移行して表示箇所Aに表示していた駐車禁止アイコンを消去する。なお、すでに駐車禁止アイコンを表示していない場合には、当該駐車禁止アイコンを表示していない状態のままにする。
【0062】
この処理による動作について、図5〜図7を参照して説明する。図5の実線(太線)で示した部分は車両が走行した経路を示し、破線で示した部分の内部領域(円領域X,Y,Z)が駐車禁止エリアに相当する。なお、実線(細線)は、道路である。
【0063】
車両が図5に示す点a→b→c→d→e→fの順に走行する場合、まずab間では表示部5には待ち受け画面を表示する。そして、点bから駐車禁止エリア(円領域X)に入り(図6のS110:Yes)、駐車禁止アイコンを表示する(図6のS120)。すると車速が設定値(ここでは20km/hとして説明する)かを判定する(S130)。
【0064】
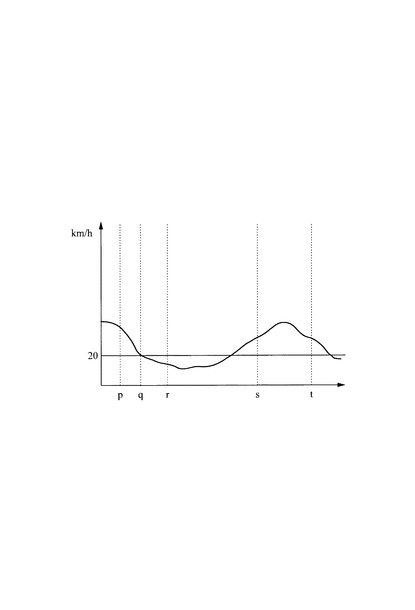
例えば、bc間を図7のst間で示す速度(常に設定値の20km/hを超える速度)で通過した場合には、b点で駐車禁止アイコンは表示され(S110:Yes、S120)、c点で駐車禁止アイコンが消去される(S110:No,S160)が、音声による警告がされない(S130:No)。
【0065】
一方、図7のr点で示す速度(20km/h以下の速度)で点bを通過した場合や、b点ではp点で示す速度(20km/hを超える速度)で通過したがその後bc間で速度が減少しq点で示す速度(20km/h)以下になった場合には、S130で車速が設定値以下であると判定された時点で(S130:Yes)、音声による警告を行なう(S140)。
【0066】
このように駐車禁止エリア内を走行していても、駐車が想定される速度にならなければ「この付近駐車禁止エリアです」という音声出力による報知がされないのでユーザにとっての煩わしさを解消できる。
【0067】
また、音声による出力を行なった場合(S140)、続くS150では、車両の現在位置がS110で入ったと判定された駐車禁止エリア(円領域X)から出ており、かつ、当該駐車禁止エリア(円領域X)に入ってから一定距離走行したか否かを条件判定する。よって、例えば新たな駐車禁止エリア(円領域Z)に入ったdf間において、音声出力がなされてから一定距離走行していなければ音声出力はなされないこととなる。
【0068】
このようにして、頻繁に音声出力がされることを抑止するため、ユーザが煩わしさを感じることがなくなる。しかも駐車禁止エリア内であれば、駐車禁止アイコンは表示されるため、ユーザは表示を見て駐車禁止エリアか否かを判断することもできる。
【0069】
なお、本実施形態では、駐車禁止位置に関する情報として座標データを用い、その座標データを中心として固定された半径の円領域の組み合わせ駐車禁止エリアを構成することとしたが、例えば、駐車禁止位置に関する情報として、個々の円の半径を座標データと関連付けて記憶し、駐車禁止エリアを座標データ及び半径のデータを用いた円領域の組み合わせで構成してもよい。また、円領域ではなく、楕円、矩形、その他の幾何学図形の組み合わせや、ベクトル情報、その他の数学的表現を用いてもよい。例えば、ナビゲーション装置のように道路リンクデータを有する場合には、各道路リンクデータに対応付けて、当該道路が駐車禁止エリアか否かを記憶するようにしてもよい。
【0070】
また本実施形態では、一定距離走行したことを条件に駐車禁止アイコンを消去する構成としているため(S150:Yes)、駐車禁止エリア外に出ている場合でも駐車禁止アイコンが表示される場合があるが、例えば、駐車禁止アイコンの表示・消去の処理と、音声の出力(警告)の処理を別の処理に分けて独立のタスクとし、これらのタスクを時分割(マルチタスク)で実行するようにしてもよい。この場合、駐車禁止アイコンの処理は、単に駐車禁止エリア内である場合に駐車禁止アイコンを表示し、駐車禁止エリア外である場合には駐車禁止アイコンを消去するようにし、音声出力の処理は、図6のS120及びS160を除く処理とすればよい。
【0071】
また、さらに、制御部18には次の構成を備えるとよい。制御部18に電源が投入され、制御部18に接続された各種装置を初期化した後、図6に示したS110の処理を開始する前に、現在位置が、駐車禁止エリア内か否かを判定し、駐車禁止エリア内であれば、次に現在位置が駐車禁止エリア外に出るまでS110の処理に移行しない処理を行なう。
【0072】
このようにすれば、例えば駐車場が駐車禁止エリアの近傍にある場合など、実際には駐車禁止エリアでない場所にもかかわらず駐車禁止エリアと判定されている場合に、その場所に駐車しておいた車のエンジンを始動させた際に、報知が抑制されることとなるため、エンジンをかけるたびにこの報知がなされてしまう煩わしさをなくすことができる。
【0073】
また、制御部18はさらに次の処理を行なうとよい。例えば、図6のS140において、GPS受信機8によって検出された現在位置と時刻から車速を求め、所定の渋滞状態か否かを判定し、所定の渋滞状態の場合には、音声による出力(警告)を行なわない処理を行なう。所定の渋滞状態であるとの推定は、例えば、駐車禁止エリアへの進入の前の所定時間(例えば3分間)の速度が所定値以下(例えば20km/h以下)である場合に渋滞であると判定することで行うとよい。そして、渋滞状態であると推定された場合には、駐車禁止エリアである旨の報知を行わないように制御する。よって、駐車禁止エリアである旨の報知(警告)が頻繁になされ、ユーザに煩わしさを与えてしまうことを防止することができる。
【0074】
また、さらにデータベース19には、駐車禁止エリアの情報(例えば円領域の中心座標など)に関連付けて当該駐車禁止の期間(時間帯、曜日、日など)など、駐車禁止の条件に関する情報を記憶し、この駐車禁止の条件を満たすか否かをGPS受信機8で受信した日時情報と比較し、この条件を満たす場合のみ、図6のS140で報知するようにするとよい。このようにすれば、条件を満たさない場合には音声が出力されないので、ユーザは煩わしさを感じずに済む。
【0075】
なお、条件を満たさない場合であっても、所定時間後(例えば2時間以内)に条件を満たす場合には、音声の報知をするようにしてもよい。このようにすれば、例えば、現在は駐車禁止エリアではないが、所定時間後には駐車禁止エリアであるような場所について、音声による警告を与えることができる。
【0076】
また、さらに、駐車禁止エリアの情報(例えば円領域の中心座標など)に関連付けて重要度を記憶する。この重要度は、例えば、重要度の高い順に、駐車禁止監視最重点エリア、駐車禁止監視重点エリア、駐車禁止監視エリアの3段階とし、図6のS140では、この重要度に応じて「この付近、駐車禁止監視最重点エリアです」、「この付近、駐車禁止重点監視エリアです」、「この付近、駐車禁止監視エリアです」のように、異なる音声出力を行なう。
【0077】
なお、この重要度に応じてS130の条件判断の車速の設定値を異なるものとしてもよい。特に、重要度の高い駐車禁止エリアについては、車速の設定値を相対的に高くし、重要度の低い駐車禁止エリアについては、車速の設定値を相対的に低く設定するとよい。例えば、駐車禁止監視最重点エリアの車速の設定値は25km/h、駐車禁止重点エリアを20km/h、駐車禁止エリアを10km/hとする。このようにすれば、ユーザにとって、音声出力の煩わしさをなくすことができるとともに、駐車禁止エリアを的確に知らせることができる。
【0078】
また、制御部18はさらに次の処理を行なうとよい。データベース19に駐車場位置の緯度経度等の座標情報を記憶し、図6のS140で、駐車禁止エリアである旨の報知を行った後、GPS受信機8で検出した現在位置に最も近い、データベース19に記憶された駐車場位置についての方向と距離を、スピーカ20から音声で報知するとともに、表示部5に表示する。例えば、「右方向300mに駐車場があります」のように音声出力し、表示部5に右矢印の画像を表示するとともに「右方向に駐車場があります」と表示する。このようにすれば、路上に駐車しようとしているユーザに対して駐車場位置を知らせることができる。
【0079】
また、次の機能を備えるようにするとよい。電波検出手段たる無線受信機15で、緊急車両の発する電波を検出し、S120の処理(駐車禁止エリア内)において、無線受信機15から緊急車両の発する電波が受信された場合には、駐車禁止エリアである旨の音声出力を行なう。このようにすれば、緊急車両の妨げになるような駐車を防止することに貢献できる。
【符号の説明】
【0080】
5 表示部
6 ランプ
8 GPS受信機
15 無線受信機
18 制御部
19 データベース
20 スピーカ
【技術分野】
【0001】
本発明は、駐車禁止エリア報知装置に関するものである。
【背景技術】
【0002】
従来、車両速度測定装置から送出されるマイクロ波を検知して報知したり、車両速度測定装置の位置情報を記憶保持しておき、GPSにより検出した自車の位置と車両速度測定装置との位置とが所定の関係になった場合に警報を発したりするレーダー探知機がある。このレーダー探知機の付加機能として、駐車禁止エリアに自車が通りかかった際に、例えば「この付近、駐車禁止エリアです」といった音声や表示により報知(警告)を行う機能を有するものが知られている。
【0003】
このような機器では、自車の現在位置を検出し、検出した現在位置が予め記憶された駐車禁止地点から所定の距離内かどうかを検索し、駐車禁止地点から所定の距離内である場合に、自車の現在位置が駐車禁止エリアであることを報知している。こうした報知を行うことにより、ユーザは駐車禁止エリアであることをあらかじめ知ることができるので、例えば運転者が駐車禁止の標識を見落としていたり、標識が設置されていなかったりして、うっかり路上に駐車してしまったりすることを防止することができ、交通秩序の維持に貢献している。
【0004】
ところが、こうした機器では、駐車禁止エリアにさしかかると常に報知がなされるため、駐車する意思のない運転者にとっては、煩わしく感じることがある。特に駐車禁止エリアの集中している地域では駐車する意志に関係なく頻繁に警告されることになりとても迷惑に感じるという問題がある。
一方、特許文献1に開示された車両用駐車違反抑止装置は、車速が零であり、且つ、オートマチックトランスミッションがPレンジであり、且つ、パーキングブレーキが引かれていることをもって、車両が駐車することを判断し、この判断がなされた場合に、自車位置と道路地図データから駐車禁止区域にあるかを判定し、駐車禁止区域にある場合にはその旨をドライバに報知するものである。この特許文献1に開示された発明では、走行中は、駐車禁止区域であることが報知されないので、上記の問題は生じない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−199185
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の装置では、ユーザは、車を路肩に完全に止めた状態でないと、その場所が駐車禁止区域であるか否かを知ることができない。このように、いわば、すでに駐車の準備(体制)が完了し、まさにエンジンを切ろうとする段階でドライバに対して駐車禁止区域であることを報知するため、運転者にとってはもっと早く報知してほしいという要求があった。
【0007】
また、このように車速が零であり、且つ、オートマチックトランスミッションがPレンジであり、且つ、パーキングブレーキが引かれている状態から、エンジンが切られ、装置への電源供給が遮断されるまでの時間が短く、駐車禁止区域にある旨の報知がなされる前に装置への電源が遮断されてしまい、適切な報知がなされないという問題があった。
【0008】
このように先行文献1に開示された技術では駐車禁止区域である旨の報知のタイミングも遅すぎるという問題がある。
【0009】
また例えば駐車場が道路の近傍にある場合など、実際には駐車禁止区域でない場所にもかかわらず駐車禁止区域と判定されている場合に、その場所に駐車しておいた車のエンジンを始動させると、エンジン始動時(あるいはACCON時)に駐車禁止区域である旨の報知がなされてしまうという問題がある。特に駐車禁止区域の道路の近傍に駐車場がある利用者は、毎度エンジンをかけるたびにこの報知がなされてしまい大変煩わしい。さらに、オートマチックトランスミッションがPレンジであることや、パーキングブレーキの信号を装置と接続する必要があるため設置作業が繁雑となる。
【0010】
本発明は、駐車禁止エリアである旨の報知(警告)が頻繁になされ、ユーザに煩わしさを与えてしまうことを防止するとともに、従来よりも適切なタイミングで駐車禁止エリアである旨の報知を行うことのできる駐車禁止エリア報知装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上述した目的を達成するために、本発明に係る駐車禁止エリア報知装置は、(1)車両の位置を検出する位置検出手段と、駐車禁止位置に関する情報を記憶する記憶手段と、前記位置検出手段によって検出された車両の位置と前記記憶手段に記憶された駐車禁止位置に関する情報とにより、駐車禁止エリアか否かの判断に基づいて駐車禁止エリアである旨の報知を行う報知手段と、を備える駐車禁止エリア報知装置において、当該車両の速度を検出する車速検出手段を備え、前記報知手段は、前記駐車禁止エリア内へ当該車両が進入した際の前記車速検出手段によって検出された車速が、所定の車速以上の場合に前記駐車禁止エリアである旨の報知を抑制し、所定の車速未満の場合に前記駐車禁止エリアである旨の報知を行うように構成した。
【0012】
なお、「報知を抑制する」とは、例えば、報知を行わないことや、報知を目立たなくすることを含む。所定の車速とは、駐車する意図があると思われる車速と、駐車する意図がないと思われる車速の間の車速とする。所定の車速は、例えば20km/h程度とするとよい。なお、この所定の車速をユーザが設定するための所定車速設定手段を設け、所定車速設定手段によって設定された車速を所定の車速とするとよい。
【0013】
さらに、車速検出手段は、具体的な走行速度を検出するものに限ることはなく、車速に応じた値を検出し、出力できるものでもよい。たとえば、振動センサを用いることができる。走行条件が同じ場合、一般的に、走行速度が速くなるほど、振動も大きくなる傾向にある。従って、所定の車速に対応する振動センサの出力値を基準値として設定しておき、振動センサの出力値が基準値以上の場合には報知を抑制し、基準値未満の場合には報知をするように構成できる。
【0014】
さらにまた、車速検出手段は、具体的なセンサ・測定装置を別途設けるものに限ることはなく、たとえば、位置検出手段による車両の位置情報と、経過時間情報を利用して車速を算出するようにしてもよい。
【0015】
この発明によれば、駐車禁止エリアに進入した際の車速が所定の車速以上である場合には、駐車禁止エリアである旨の報知が抑制され、所定の車速未満の場合に前記駐車禁止エリアである旨の報知がされる。よって、駐車する意図がないと思われる速度で走行中に駐車禁止エリアに入った場合に、駐車禁止エリアである旨の報知が抑制されるため、ユーザに報知に伴う煩わしさを与えてしまうことを防止することができる。
【0016】
(2)前記報知手段は、音によって報知を行う音報知手段と、光によって報知を行う光報知手段とを備え、前記報知の抑制は、前記音報知手段による音の報知のみ行い、光報知手段による報知に対しては抑制を行なわずに報知するようにした。走行中でも駐車禁止エリアを知りたい場合があるが、ユーザは、光による報知によって現在位置が駐車禁止エリアか否かを知ることができる。
【0017】
(3)前記報知手段は、前記駐車禁止エリアである旨の報知を抑制した場合であって、前記駐車禁止エリア内に当該車両がある場合において、前記車速が所定の車速より小さくなった場合には、前記駐車禁止エリアである旨の報知を行うようにするとよい。このようにすれば、駐車禁止エリアへの進入時の車速が所定の車速以上であって、駐車禁止エリア内に入った際には駐車禁止エリアである旨の報知が抑制されていた場合であっても、その後の車両の速度の低下に応じて、適切と想定されるタイミングで駐車禁止エリアである旨の報知を行うことができる。
【0018】
(4)自己の起動を検知する起動検知手段を備え、前記報知手段は、起動検知手段によって自己の起動が検知された場合に前記駐車禁止エリアにある場合には、前記駐車禁止エリアである旨の報知を抑制するように構成するとよい。ここで、自己の起動とは、例えば、駐車禁止エリア報知装置自体への電源が投入された場合や当該装置にリセットがかかった場合等を意味する。このようにすれば、例えば駐車場が駐車禁止エリアの近傍にある場合など、実際には駐車禁止エリアでない場所にもかかわらず駐車禁止エリアと判定されている場合に、その場所に駐車しておいた車のエンジンを始動させた際に、報知が抑制されることとなるため、エンジンをかけるたびにこの報知がなされてしまう煩わしさをなくすことができる。
【0019】
(5)当該車両の走行路が渋滞状態であるか否かを推定する渋滞状態推定手段を備え、前記渋滞状態推定手段によって推定された渋滞状態が所定の渋滞状態である場合には、前記所定の車速未満であっても駐車禁止エリアである旨の報知を抑制するようにするとよい。
【0020】
渋滞状況推定手段は、例えばVICSのように車両外から渋滞情報を受信する構成としてもよいが、特に車速検出手段によって検出された車速に基づいて推定する構成にするとコストがかからずよい。この構成の場合、所定の渋滞状態であるとの推定は、例えば、駐車禁止エリアへの進入の前の所定時間(例えば3分間)の速度が所定値以下(例えば20分以下)である場合に渋滞であると判定することで行うとよい。なお、この渋滞か否かの判定を速度で行う場合には、所定の渋滞状態であるか否かの判定基準(しきい値速度)は、報知の抑制を行うか否かの判定基準(しきい値速度)と同じにしてもよいし、異ならせてもよい。また、速度で判定する場合には、コストの面から考えると、渋滞状況推定手段は車速検出手段の出力を利用するのが好ましいが、別のセンサ等を設け、そのセンサ出力に基づいて判断するようにしてもよい。
【0021】
係る構成にすれば、渋滞状態であると推定された場合には、駐車禁止エリアである旨の報知を行わないので、駐車禁止エリアである旨の報知(警告)が頻繁になされ、ユーザに煩わしさを与えてしまうことを防止することができる。
【0022】
(6)駐車場位置に関する情報を記憶する駐車場情報記憶手段を備え、前記報知手段は、駐車禁止エリアである旨の報知を行った後、前記現在位置検出手段によって検出された現在位置及び前記駐車場位置に関する情報に基づき駐車場位置に関する情報を報知するようにするとよい。
【0023】
駐車禁止エリアである旨の報知がなされた場合に、その後、駐車できる場所を探すのは、ユーザ自身が行う必要があった。しかし、このようにすれば、路上に駐車しようとしているユーザに対して駐車場位置を知らせることができるので、駐車場を探すために無駄な走行をすることを抑止でき、時間短縮・省エネ等の効果が発揮する。
【0024】
(7)前記駐車禁止位置に関する情報には、駐車禁止エリアの重要度を特定する情報が関連付けられており、前記報知手段は、前記重要度に応じて異なる報知態様で報知するようにするとよい。重要度は、例えば、重点的に監視するエリアか否かの程度を特定するもので、一例を挙げると、“a.駐車禁止監視最重点エリア”、“b.駐車禁止監視重点エリア”、“c.駐車禁止監視エリア”の3段階とすると、より重点的に監視される対象エリアとなるaが最も重要度高く、以下、b→cの順に重要度が低くなるように設定される。もちろん、段階分けは、このように3段階に分けるものに限らず、2段階或いは4段階以上としても良い。重要度に応じた報知をすることで、例えば、重要度が高いものは音声と表示部の両方を用いて報知し、重要度が低いものは表示部のみの報知としたり、報知をしないなどとしたりすることで、音声による報知が頻繁に発生することが抑制され、ユーザにとって、音声出力の煩わしさをなくすことができるとともに、駐車禁止エリアを的確に知らせることができる。
【0025】
(8)緊急車両を検出する緊急車両検出手段を備え、前記報知制御手段は、前記駐車禁止エリア内において、前記緊急車両検出手段によって緊急車両が検出された場合には、前記報知を抑制している状態であっても、前記駐車禁止エリアである旨の報知を行うことようにすることができる。このようにすれば、緊急車両の妨げになるような駐車を防止することに貢献できる。
【0026】
緊急車両検出手段は、例えば、カーローケーションシステムのように緊急車両から発せられる緊急車両の位置をセンターに対して通知するための電波を受信することで緊急車両を検出することができる。また、電波を利用する場合、このようにカーローケーションシステムにおける緊急車両が出射される電波に限られることはなく、緊急車両から出射され、一般車両と区別することができる電波であれば良い。そして、電波を利用する場合には、例えば、緊急車両の発する電波を検出する電波検出手段を備え、前記報知手段は、前記駐車禁止エリア内において、前記電波検出手段によって緊急車両の発する電波が受信された場合には、前記報知を抑制している状態であっても、前記駐車禁止エリアである旨の報知を行うように構成することもできる。さらには、検出する方法は、電波に限るものでもない。すなわち、例えば緊急車両検出手段は、緊急車両が緊急走行時に発する音をマイク等で検知し、検知した当該音が所定の音量レベル以上のときに緊急車両を検知したものとしてもよく、その他各種の方式がとれる。
【発明の効果】
【0027】
本発明では、駐車禁止エリアである旨の報知(警告)が頻繁になされ、ユーザに煩わしさを与えてしまうことを防止するとともに、従来よりも適切なタイミングで駐車禁止エリアである旨の報知を行うことができる。
【図面の簡単な説明】
【0028】
【図1】本発明の好適な一実施形態を示す図である。
【図2】本実施形態のブロック図を示す図である。
【図3】表示部の表示態様の一例を示す図である。
【図4】表示部の表示態様の一例を示す図である。
【図5】動作の一例を説明する図である。
【図6】制御部の機能を示すフローチャートである。
【図7】本実施形態の作用を説明するための車速の変化の一例を示す図である。
【発明を実施するための形態】
【0029】
図1,図2は、本発明の好適な一実施の形態を示している。本実施形態の駐車禁止エリア報知装置は、検出した現在の位置情報と記憶した目標物の位置情報等とから所定の位置関係にある目標物を検出し、報知する目標物検出装置の一機能として組み込んでいる。
駐車禁止エリア報知装置を実装した目標物検出装置は、図1に示すように、ケース本体1の上面にソーラーパネル2並びにスイッチ部3を配置し、ケース本体1の前面側内部にマイクロ波受信機4を配置し、ケース本体1の後面に表示部5と警報ランプ6と赤外線送受信部7とを配置している。また、ケース本体1の上面側内部には、GPS受信機8を配置する。さらに、ケース本体1の一方の側面には、アダプタージャック9を配置し、他方の側面には電源スイッチ10並びにDCジャック11を配置する。また、ケース本体1内には、スピーカも内蔵されている。
【0030】
図2に示すように、赤外線送受信部7は携帯電話機12等の赤外線送受信機を内蔵した通信装置との間でデータの送受を行なう。アダプタージャック9は、メモリカードリーダ13を接続する端子である。アダプタージャック9にメモリカードリーダ13を接続することで、そのメモリカードリーダ13に装着されたメモリカード14に格納されたデータを内部に取り込むことができる。より具体的には、メモリカード14に格納されたデータは、新規な目標物の情報(経度・緯度を含む位置情報,種別情報等)などの更新情報があり、その更新情報が制御部18経由で目標物検出装置に内蔵されるデータベース19に格納(ダウンロード)され、データ更新がされる。データベース19は、制御部18のマイコン内あるいはマイコンに外付けした不揮発性メモリ(たとえばEEPROM)により実現できる。なお、データベース19には、出荷時に一定の目標物に関する情報が登録されており、その後に追加された目標物についてのデータ等が上記のようにしてデータ更新される。また、データ更新は、赤外線送受信部7を介して行なうこともできる。
【0031】
DCジャック11は、図示省略のシガープラグコードを接続するためのもので、そのシガープラグコードを介して車両のシガーソケットに接続して電源供給を受け得るようにする。更に、本実施形態の目標物検出装置は、無線受信機15とリモコン受信機16を備えている。無線受信機15は、飛来する所定周波数の無線を受信する。リモコン受信機16は、リモコン(携帯機:子機)17とデータ通信をし、目標物検出装置に対する各種の設定を行なう。また、スイッチ部3も制御部18に接続され(図示省略)、リモコン17と同様の設定を行えるようになっている。
【0032】
そして、制御部18は、上記の各種の入力機器(受信機,通信機等)から入力される情報に基づき所定の処理を実行し、出力機器(表示部5,警報ランプ6,スピーカ20等)を利用して所定の警報・メッセージを出力する。これらの基本機能を簡単に説明すると、以下の通りである。
【0033】
まず、本実施形態では、表示部5の寸法形状を従来よりも大きくしている(特に高さ方向を広げている)。これに伴い、表示部5を実装するケース本体1の後方側の高さHを、その他の部位の高さH0よりも十分に大きくしている。この表示部5は、たとえば、有機ELディスプレイや液晶ディスプレイを用いて実現される。
【0034】
図3に示すように、表示部5は、その大部分を占めるメイン表示領域R1と、下端側に配置されたメッセージ表示領域R2と、上端側に配置されたアイコン表示領域R3と、を備えている。アイコン表示領域R3は、バッテリ残量を示すアイコンM1や、GPSの受信中を示すアイコンM2や、マイクロ波受信中を示すアイコンM3などの動作状態を示すアイコンや、現在位置の周囲が駐車禁止エリアであることを示す駐車禁止アイコンM4のように周囲の状態・情報を放置するアイコンなどを表示する。係る表示は、制御部18からの制御命令により出力される。
【0035】
表示部5における表示内容について説明しつつ、警報機能を説明する。メッセージ表示領域R2は、所定の目標物の種類を特定する名称(図3(a)では、“ループコイル”)と、当該目標物までの距離(図3(a)では、“1200m”)を表示する。後述するように、この領域R2に表示された目標物がターゲット表示領域R1に表されている場合、その表示された警報対象アイコンは、他の警報対象アイコンと区別できる態様で描画している。
【0036】
メイン表示領域R1は、主として目標物(ターゲット)と自車との位置関係を示すためのもので、複数の目標物を表示可能となっている。自車と目標物とは、共にアイコンで示している。自車は、略菱形で形成される自車進行アイコンI0で示す。この自車進行アイコンI0を中心とした所定半径(切替可)からなる円の範囲内に存在する目標物(ターゲット)が、その存在位置にターゲットアイコンとして表示される。
【0037】
更に、メイン表示領域R1における表示画面は、自車の進行方向を上に見た状態で表示する。これは、GPS受信機8から与えられる自車の位置情報に基づき、制御部18が自車の進行方向を求め、その進行方向が上に向いた状態での各目標物の位置を求め、円形の表示領域内に存在するものを該当する位置に表示することで対応できる。
【0038】
目標物は、所定形状(丸形或いは星形)のターゲットアイコンTnで示している。このターゲットアイコンTnの中には、自車との位置関係から、警報対象となる目標物を示す警報対象アイコンと、警報対象と成らない目標物を示す警報対象外アイコンがある。ここで警報対象とは、自車の進行方向より前(進行方向より±90°)にあるターゲットであり、且つ、マイクロ波を発する速度計測装置などの警報角度があるターゲットについては、さらに警報対象角度内(ターゲットの警報角度±40°)の条件を具備するものである。
【0039】
警報対象外アイコンは、アイコン色を灰色としている。また、警報対象アイコンは、警報の対象となるターゲット(目標物)を表すアイコンであり、緊急度(重要度)に応じて色分けをしている。色分けの一例としては、
緊急度大:赤色
緊急度中:黄色
緊急度小:緑色
の3種類としている。
【0040】
緊急度が大の目標物としては、例えばループコイル等の車両速度計測装置がある。緊急度が中の目標物としては、例えば警察署などがある。緊急度が小の目標物としては、例えば、高速道路におけるサービスエリアや、一般道路脇に設置される道の駅などの交通に関係する場所や、Nシステムなどの車両速度計測装置以外の監視装置等などがある。緊急度が小の目標物としては、駐車場などがある。
【0041】
これにより、丸形のターゲットアイコンは、最大4色に色分けされて表示されることになる。なお、設定により表示/非表示とする目標物の種類を切り替えることができる。係る切り替え設定は、スイッチ部3或いはリモコン17を操作して行なう。
【0042】
データベース19には、目標物の種類と、位置情報と、緊急度と、監視方向(ある場合)などを関連付けたテーブル構造となっている。さらに、有効/無効フラグを関連付け、当該フラグがONのもののみを表示するように設定するとよい。
【0043】
更に、複数ターゲットを表示するに際し、ターゲットの重要度(優先度)の高いものを前面側に描画するようにしている。これは、GPS受信機8から与えられる自車位置情報(経度・緯度)と、現在の円形の表示領域の半径情報(或いは最大半径)と、を取得するとともに、データベース19にアクセスし、現在位置と目標物までの距離が取得した半径よりも短いものを抽出し、車両の進行方向との関係からメイン表示領域R1における表示位置を特定する。更に、表示対象となった目標物の重要度を求め、重要度の低いものから順に所定色のターゲットアイコンを描画する。これにより、複数のターゲットアイコン同士の一部又は全部が重なった場合、後で描画される重要度の高いターゲットのターゲットアイコンを描画するに際し、すでに描画された重要度の低いアイコンとかなさる部分は、現在描画中の重要度の高いターゲットアイコンが上書きで描画されることから、ターゲットの重要度(優先度)の高いものが前面側に描画されるようになる。
【0044】
更に本実施形態では、ターゲットアイコンのうち、条件を具備する1つのアイコンをフォーカスアイコンFとし、他の円形のターゲットアイコンと異なる表示態様で描画する。このフォーカスアイコンは、フォーカスが当たっているターゲット(フォーカスターゲット)を表すアイコンである。異なる表示態様としては、たとえば形状を異ならせたり(たとえば星形)、点滅させたりすることなどがある。アイコン色は対応するターゲットアイコンにおけるアイコン色と同じにする。
【0045】
具体的には、フォーカスアイコンは、現在警報中、或いは警報中ではないが警報対象ターゲットが画面内に存在している、又はユーザが選択したターゲットを指す。上述の通り、フォーカスターゲットのアイコンは、フォーカスアイコンとなって、ブリンキング(点滅)する。そして、制御部18は、画面最下段のメッセージ表示領域R2に対して、そのフォーカスターゲットについての情報、具体的には、ターゲット名(種類名)と、そのターゲット(目標物)までの距離と、を表示する。
【0046】
換言すると、メッセージ表示領域R2にメッセージが表示されている場合、そのメッセージに対応するターゲットアイコンがメイン表示領域R1に表示されていると、当該ターゲットアイコンがフォーカスアイコンとなり、表示態様が切り替わる(星形&ブリンキング)。
【0047】
つまり、フォーカスターゲットは、自車とターゲット(目標物)が一定の関係になり、報知タイミングになった場合に自動的に選択されて表示が切り替わる場合と、ユーザのマニュアル操作(スイッチ部3またはリモコン17の操作)によりフォーカスターゲットを切り替える場合がある。また、ユーザ操作に伴うフォーカスターゲットの切替は、スイッチ部3或いはリモコン17に設けた所定のスイッチを押下することで、現在フォーカスが当たっているターゲットから、次に遠い/近いターゲットをフォーカスターゲットに切り替える。なお、フォーカスが当たっていない場合に、この操作(所定のスイッチの押下)を行うと、警報の対象内外に関係なく、自車位置から最も近いターゲット(ターゲットアイコン)をフォーカスターゲット(フォーカスアイコン)にする。
【0048】
具体的には、警報画面においては、基準となるターゲットフォーカスは自車位置から最も近い警報対象であるので、図3(a)に示すように、制御部18は、ターゲットアイコンT1がフォーカスアイコンFになり、当該アイコンを星形でブリンキングさせるとともに、そのフォーカスアイコンFの情報(ターゲット名:ループコイル,距離:1200m)をメッセージ表示領域R2に表示させる。
【0049】
この状態で、ユーザが所定のスイッチの押下操作による最近/最遠フォーカス操作を行うと、制御部18は、現在のフォーカスターゲットから最近/最遠のターゲットをフォーカスターゲットとし、図3(b)に示すように(この例では、最近のターゲットが選択)該当するターゲットアイコンT2がフォーカスアイコンFとなり、星形でブリンキングさせるとともに、そのフォーカスアイコンFの情報(ターゲット名:駐車場,距離:1800m)をメッセージ表示領域R2に表示させる。
なお、ユーザの操作により強制的にフォーカスターゲットが設定された場合、その状態で一定時間(例えば、10秒)経過したならば、基の状態に復帰させる。
【0050】
また、自車位置と目標物の距離が所定の距離になるなどの警報条件中となったターゲット(警報中対象)が存在しない場合には、たとえば図4(c)に示すような待ち受け画面となり、メッセージ表示領域R2に表示すべき情報がないので、メッセージ表示領域の分までメイン表示領域R1となり、3つのターゲットアイコンT11〜T13が表示される。この状態で、ユーザが所定のスイッチの押下操作による最近/最遠フォーカス操作を行うと、制御部18は、自車位置から最近/最遠のターゲットをフォーカスターゲットとし、図4(a)に示すように(この例では、最近のターゲットが選択)該当するターゲットアイコンT1がフォーカスアイコンFとなり、星形でブリンキングさせるとともに、そのフォーカスアイコンFの情報(ターゲット名:駐車場,距離:1200m)をメッセージ表示領域R2に表示させる。なお、制御部18は、GPS受信機から与えられる自車位置情報と、データベース19に格納された各ターゲットの位置情報とに基づき、各ターゲットまでの距離を算出することで、最近/最遠のターゲットを抽出することができる。
【0051】
なお、図3は、制御部18が、GPS位置情報に基づく警報や、マイクロ波の受信などの警報条件を満たしたと判断した場合に表示する警報画面の一例を示しており、図4は係る警報条件を具備しない場合の待ち受け状態の画面(待ち受け画面)の一例を示している。警報画面と待ち受け画面について、それぞれ画面を用いるかは、例えば、制御部18が、ユーザによるリモコン17の操作によって設定された設定内容を、制御部18の不揮発性メモリに記憶しておき、当該情報に基づき制御部18は所定の表示形態で表示する。
【0052】
複数のターゲットアイコンの位置情報と、自車の位置情報を2次元空間上で表示可能とする表示形態は、GPS位置情報に基づく警報や、マイクロ波の受信などの警報情報を具備しない待ち受け状態の画面(待ち受け画面:図4(a),(c))と、実際の警報画面(図3)のいずれにも適用できる。さらに、警報時には、上記の2次元空間上で複数のターゲット位置を報知するものでなく、従来のように文字等のメッセージを出力表示するようにしてもよい。このようにした場合、表示画面が大きいことから、ユーザに対して何の警報であるかを確実に通知することができる。また、待ち受け画面を図4(d)に示すように、ターゲットアイコンを表示しないイラスト画面(図では、衛星数(24個),自車の位置情報(軽度,緯度,高度)を文字列で表示するようにしてもよい。
【0053】
待ち受け画面並びに警報画面は、図示したパターンに限ることはなく、その他のパターンを用意するのを妨げない。そして、待ち受け時と警報時にどのパターンを用いるかは、リモコン17,スイッチ部3の操作によりユーザが選択する。すなわち、制御部18が、表示部5に対し、待ち受け時と警報時にどのパターンを用いるかを選択する画面を表示させる。制御部18は、ユーザによるリモコン17またはスイッチ部3の操作による選択状態を検出し、その選択状態に基づき、それぞれの場合についてどのパターンを用いるかを制御部18の不揮発性メモリに記憶しておく。そして、制御部18は、記憶されたパターンにもとづき、待ち受け時には待ち受け時用に記憶されたパターンの表示を行い、警報時には警報時用に記憶されたパターンの表示を行う。
【0054】
次に、目標物検出装置に実装された駐車禁止エリア報知装置の機能を説明する。まず、記憶手段あるデータベース19には、実際の駐車禁止エリアを円領域で近似したデータを格納する。例えば、図5の破線で示すように、駐車禁止エリアを円領域の組み合わせで構成する。すなわち、円の半径を例えば200mとし、円の中心点の緯度経度に対応する座標データを地図データベース19に記憶しておく。本実施形態では、半径の長さを固定としたため、個々の駐車禁止エリアの領域を特定する情報としては、最低限、円の中心点の緯度経度情報のみが記憶されればよいが、適宜半径を変えられるように設定にした場合には、個々の駐車禁止エリアごとにその円の中心点の緯度経度情報と半径とを関連づけて記憶する。
【0055】
また、位置検出手段は、GPS受信機8により実現し、報知手段は、表示部5,ランプ6,スピーカ20等により実現される。このように、目標物検出装置が元々備えている機器を兼用している。車速は、GPS受信機8にて取得するGPS情報に基づいて、制御部18が演算処理して求める。車速検出手段は、GPS受信機8及び制御部18により実現される。なお、車速を求めるためには、移動距離と移動時間とから算出できるが、移動距離は複数地点の位置情報の差分データから求めることができ、移動時間はたとえば内蔵するタイマ・内部時計から求めたり、GPS情報として送られてくる時刻情報を利用して求めたりすることができる。
【0056】
そして、報知制御手段たる制御部18は、図6に示す処理を行なう。すなわち、GPS受信機8で受信したデータに基づき算出した車両の現在位置が駐車禁止エリア内であるか否かを判定する(S110)。車両の現在位置が駐車禁止エリア内でない場合には、処理ステップS160へ移行する。一方、車両の現在位置が駐車禁止エリア内である場合には(S110:Yes)、処理ステップS120へ移行する。
【0057】
処理ステップS120では、駐車禁止エリア内であることを示す駐車禁止アイコン(駐車禁止マークに似せたマーク)M4を表示する。つまり、駐車禁止アイコンが表示されていない場合(図4(c),(d)参照)、駐車禁止アイコンを表示部5のアイコン表示領域R3内の所定の表示箇所Aに表示する(図4(b)参照)。すでに駐車禁止アイコンを表示中の場合(図3,図4(a)参照)には、その駐車禁止アイコンを表示したままにする。
【0058】
続く処理ステップS130では、GPS受信機8で受信したデータに基づき算出した車速が、設定値以下であるか否かを判定する。この設定値は前述のユーザによる設定内容として不揮発性メモリに記憶されている。なお、当該設定のデフォルト値は20km/hとしている。車速が設置値より大きい場合には(S130:No)、S110へ戻る。よって、駐車禁止アイコンの表示のみで報知する。
【0059】
一方、車速が設置値以下の場合には(S130:Yes)、処理ステップS140へ移行する。この処理ステップS140では、制御部18の有する音声合成機能により、スピーカ20から「この付近駐車禁止エリアです」と音声を出力する。このように、車速が設定値以下の場合には、運転者はそのまま停車し、駐車しようとしている可能性が高いので、アイコン表示に加えて音声による報知を行うことで、その一体が駐車禁止エリアであることを確実に伝え、誤って駐車禁止エリアに駐車してしまうことを未然に抑止できる。
【0060】
続く処理ステップS150では、車両の現在位置がS110で入ったと判定された駐車禁止エリアから出ており、かつ、当該駐車禁止エリアに入ってから一定距離走行したか否かを条件判定する。この一定距離は、S140での音声の出力があってから、ユーザが煩わしさを感じない時間を走行すると想定される距離に設定する。例えば、この一定距離は700mに設定する。なお、本実施形態では一定距離としているが報知されて煩わしさを感じない程度の時間(一定時間、例えば3分など)としてもよい。
【0061】
この条件が満たされない場合には(S150:No)、S150へ戻る。一方、この条件が満たされたならば(S150:Yes)、S160へ移行して表示箇所Aに表示していた駐車禁止アイコンを消去する。なお、すでに駐車禁止アイコンを表示していない場合には、当該駐車禁止アイコンを表示していない状態のままにする。
【0062】
この処理による動作について、図5〜図7を参照して説明する。図5の実線(太線)で示した部分は車両が走行した経路を示し、破線で示した部分の内部領域(円領域X,Y,Z)が駐車禁止エリアに相当する。なお、実線(細線)は、道路である。
【0063】
車両が図5に示す点a→b→c→d→e→fの順に走行する場合、まずab間では表示部5には待ち受け画面を表示する。そして、点bから駐車禁止エリア(円領域X)に入り(図6のS110:Yes)、駐車禁止アイコンを表示する(図6のS120)。すると車速が設定値(ここでは20km/hとして説明する)かを判定する(S130)。
【0064】
例えば、bc間を図7のst間で示す速度(常に設定値の20km/hを超える速度)で通過した場合には、b点で駐車禁止アイコンは表示され(S110:Yes、S120)、c点で駐車禁止アイコンが消去される(S110:No,S160)が、音声による警告がされない(S130:No)。
【0065】
一方、図7のr点で示す速度(20km/h以下の速度)で点bを通過した場合や、b点ではp点で示す速度(20km/hを超える速度)で通過したがその後bc間で速度が減少しq点で示す速度(20km/h)以下になった場合には、S130で車速が設定値以下であると判定された時点で(S130:Yes)、音声による警告を行なう(S140)。
【0066】
このように駐車禁止エリア内を走行していても、駐車が想定される速度にならなければ「この付近駐車禁止エリアです」という音声出力による報知がされないのでユーザにとっての煩わしさを解消できる。
【0067】
また、音声による出力を行なった場合(S140)、続くS150では、車両の現在位置がS110で入ったと判定された駐車禁止エリア(円領域X)から出ており、かつ、当該駐車禁止エリア(円領域X)に入ってから一定距離走行したか否かを条件判定する。よって、例えば新たな駐車禁止エリア(円領域Z)に入ったdf間において、音声出力がなされてから一定距離走行していなければ音声出力はなされないこととなる。
【0068】
このようにして、頻繁に音声出力がされることを抑止するため、ユーザが煩わしさを感じることがなくなる。しかも駐車禁止エリア内であれば、駐車禁止アイコンは表示されるため、ユーザは表示を見て駐車禁止エリアか否かを判断することもできる。
【0069】
なお、本実施形態では、駐車禁止位置に関する情報として座標データを用い、その座標データを中心として固定された半径の円領域の組み合わせ駐車禁止エリアを構成することとしたが、例えば、駐車禁止位置に関する情報として、個々の円の半径を座標データと関連付けて記憶し、駐車禁止エリアを座標データ及び半径のデータを用いた円領域の組み合わせで構成してもよい。また、円領域ではなく、楕円、矩形、その他の幾何学図形の組み合わせや、ベクトル情報、その他の数学的表現を用いてもよい。例えば、ナビゲーション装置のように道路リンクデータを有する場合には、各道路リンクデータに対応付けて、当該道路が駐車禁止エリアか否かを記憶するようにしてもよい。
【0070】
また本実施形態では、一定距離走行したことを条件に駐車禁止アイコンを消去する構成としているため(S150:Yes)、駐車禁止エリア外に出ている場合でも駐車禁止アイコンが表示される場合があるが、例えば、駐車禁止アイコンの表示・消去の処理と、音声の出力(警告)の処理を別の処理に分けて独立のタスクとし、これらのタスクを時分割(マルチタスク)で実行するようにしてもよい。この場合、駐車禁止アイコンの処理は、単に駐車禁止エリア内である場合に駐車禁止アイコンを表示し、駐車禁止エリア外である場合には駐車禁止アイコンを消去するようにし、音声出力の処理は、図6のS120及びS160を除く処理とすればよい。
【0071】
また、さらに、制御部18には次の構成を備えるとよい。制御部18に電源が投入され、制御部18に接続された各種装置を初期化した後、図6に示したS110の処理を開始する前に、現在位置が、駐車禁止エリア内か否かを判定し、駐車禁止エリア内であれば、次に現在位置が駐車禁止エリア外に出るまでS110の処理に移行しない処理を行なう。
【0072】
このようにすれば、例えば駐車場が駐車禁止エリアの近傍にある場合など、実際には駐車禁止エリアでない場所にもかかわらず駐車禁止エリアと判定されている場合に、その場所に駐車しておいた車のエンジンを始動させた際に、報知が抑制されることとなるため、エンジンをかけるたびにこの報知がなされてしまう煩わしさをなくすことができる。
【0073】
また、制御部18はさらに次の処理を行なうとよい。例えば、図6のS140において、GPS受信機8によって検出された現在位置と時刻から車速を求め、所定の渋滞状態か否かを判定し、所定の渋滞状態の場合には、音声による出力(警告)を行なわない処理を行なう。所定の渋滞状態であるとの推定は、例えば、駐車禁止エリアへの進入の前の所定時間(例えば3分間)の速度が所定値以下(例えば20km/h以下)である場合に渋滞であると判定することで行うとよい。そして、渋滞状態であると推定された場合には、駐車禁止エリアである旨の報知を行わないように制御する。よって、駐車禁止エリアである旨の報知(警告)が頻繁になされ、ユーザに煩わしさを与えてしまうことを防止することができる。
【0074】
また、さらにデータベース19には、駐車禁止エリアの情報(例えば円領域の中心座標など)に関連付けて当該駐車禁止の期間(時間帯、曜日、日など)など、駐車禁止の条件に関する情報を記憶し、この駐車禁止の条件を満たすか否かをGPS受信機8で受信した日時情報と比較し、この条件を満たす場合のみ、図6のS140で報知するようにするとよい。このようにすれば、条件を満たさない場合には音声が出力されないので、ユーザは煩わしさを感じずに済む。
【0075】
なお、条件を満たさない場合であっても、所定時間後(例えば2時間以内)に条件を満たす場合には、音声の報知をするようにしてもよい。このようにすれば、例えば、現在は駐車禁止エリアではないが、所定時間後には駐車禁止エリアであるような場所について、音声による警告を与えることができる。
【0076】
また、さらに、駐車禁止エリアの情報(例えば円領域の中心座標など)に関連付けて重要度を記憶する。この重要度は、例えば、重要度の高い順に、駐車禁止監視最重点エリア、駐車禁止監視重点エリア、駐車禁止監視エリアの3段階とし、図6のS140では、この重要度に応じて「この付近、駐車禁止監視最重点エリアです」、「この付近、駐車禁止重点監視エリアです」、「この付近、駐車禁止監視エリアです」のように、異なる音声出力を行なう。
【0077】
なお、この重要度に応じてS130の条件判断の車速の設定値を異なるものとしてもよい。特に、重要度の高い駐車禁止エリアについては、車速の設定値を相対的に高くし、重要度の低い駐車禁止エリアについては、車速の設定値を相対的に低く設定するとよい。例えば、駐車禁止監視最重点エリアの車速の設定値は25km/h、駐車禁止重点エリアを20km/h、駐車禁止エリアを10km/hとする。このようにすれば、ユーザにとって、音声出力の煩わしさをなくすことができるとともに、駐車禁止エリアを的確に知らせることができる。
【0078】
また、制御部18はさらに次の処理を行なうとよい。データベース19に駐車場位置の緯度経度等の座標情報を記憶し、図6のS140で、駐車禁止エリアである旨の報知を行った後、GPS受信機8で検出した現在位置に最も近い、データベース19に記憶された駐車場位置についての方向と距離を、スピーカ20から音声で報知するとともに、表示部5に表示する。例えば、「右方向300mに駐車場があります」のように音声出力し、表示部5に右矢印の画像を表示するとともに「右方向に駐車場があります」と表示する。このようにすれば、路上に駐車しようとしているユーザに対して駐車場位置を知らせることができる。
【0079】
また、次の機能を備えるようにするとよい。電波検出手段たる無線受信機15で、緊急車両の発する電波を検出し、S120の処理(駐車禁止エリア内)において、無線受信機15から緊急車両の発する電波が受信された場合には、駐車禁止エリアである旨の音声出力を行なう。このようにすれば、緊急車両の妨げになるような駐車を防止することに貢献できる。
【符号の説明】
【0080】
5 表示部
6 ランプ
8 GPS受信機
15 無線受信機
18 制御部
19 データベース
20 スピーカ
【特許請求の範囲】
【請求項1】
駐車禁止位置に関する情報を記憶し、
自車両の現在位置情報と、前記駐車禁止位置に関する情報とにより、前記自車両の現在位置が駐車禁止エリアか否かを判断し、駐車禁止エリアである旨の報知を行うか否かの決定を行い報知手段の動作を制御する報知制御機能を備え、
前記報知手段は、音によって報知を行う音報知手段と、光によって報知を行う光報知手段であり、
前記報知制御機能は、前記駐車禁止エリア内へ前記自車両が進入した際の車速が、所定の車速以上の場合に前記駐車禁止エリアである旨の報知を抑制し、所定の車速未満の場合に前記駐車禁止エリアである旨の報知を行うものであり、
前記報知制御機能における前記報知の抑制は、前記音報知手段による音の報知に対して行い、前記光報知手段による報知に対しては抑制をせずにそのまま報知するようにしたことを特徴とする駐車禁止エリア報知装置。
【請求項2】
前記報知制御機能は、前記音報知手段による音の報知を行った場合、一定期間は音の報知を抑制することを特徴とする請求項1に記載の駐車禁止エリア報知装置。
【請求項3】
前記報知制御機能は、前記駐車禁止エリアである旨の報知を抑制した場合であって、前記駐車禁止エリア内に前記自車両がある場合において、前記車速が所定の車速より小さくなった場合には、前記駐車禁止エリアである旨の報知を行うこと
を特徴とする請求項1または2に記載の駐車禁止エリア報知装置。
【請求項4】
前記駐車禁止位置に関する情報には、駐車禁止エリアの重要度を特定する情報が関連付けられており、
前記報知制御機能は、前記重要度に応じて異なる報知態様で報知させること
を特徴とする請求項1から3のいずれかに記載の駐車禁止エリア報知装置。
【請求項5】
前記重要度は、重点的に監視するエリアか否かの程度に従い複数の段階に分けることを特徴とする請求項4に記載の駐車禁止エリア報知装置。
【請求項6】
前記報知制御機能は、前記自車両の車速が、所定の車速以上の場合に前記駐車禁止エリアである旨の報知を抑制し、所定の車速未満の場合に前記駐車禁止エリアである旨の報知を行う機能を備えており、
前記重要度の高いものほど前記所定の車速を高い設定にすることを特徴とする請求項4または5に記載の駐車禁止エリア報知装置。
【請求項7】
請求項1から6のいずれかに記載の駐車禁止エリア報知装置における前記報知制御機能をコンピュータに実現させるためのプログラム。
【請求項1】
駐車禁止位置に関する情報を記憶し、
自車両の現在位置情報と、前記駐車禁止位置に関する情報とにより、前記自車両の現在位置が駐車禁止エリアか否かを判断し、駐車禁止エリアである旨の報知を行うか否かの決定を行い報知手段の動作を制御する報知制御機能を備え、
前記報知手段は、音によって報知を行う音報知手段と、光によって報知を行う光報知手段であり、
前記報知制御機能は、前記駐車禁止エリア内へ前記自車両が進入した際の車速が、所定の車速以上の場合に前記駐車禁止エリアである旨の報知を抑制し、所定の車速未満の場合に前記駐車禁止エリアである旨の報知を行うものであり、
前記報知制御機能における前記報知の抑制は、前記音報知手段による音の報知に対して行い、前記光報知手段による報知に対しては抑制をせずにそのまま報知するようにしたことを特徴とする駐車禁止エリア報知装置。
【請求項2】
前記報知制御機能は、前記音報知手段による音の報知を行った場合、一定期間は音の報知を抑制することを特徴とする請求項1に記載の駐車禁止エリア報知装置。
【請求項3】
前記報知制御機能は、前記駐車禁止エリアである旨の報知を抑制した場合であって、前記駐車禁止エリア内に前記自車両がある場合において、前記車速が所定の車速より小さくなった場合には、前記駐車禁止エリアである旨の報知を行うこと
を特徴とする請求項1または2に記載の駐車禁止エリア報知装置。
【請求項4】
前記駐車禁止位置に関する情報には、駐車禁止エリアの重要度を特定する情報が関連付けられており、
前記報知制御機能は、前記重要度に応じて異なる報知態様で報知させること
を特徴とする請求項1から3のいずれかに記載の駐車禁止エリア報知装置。
【請求項5】
前記重要度は、重点的に監視するエリアか否かの程度に従い複数の段階に分けることを特徴とする請求項4に記載の駐車禁止エリア報知装置。
【請求項6】
前記報知制御機能は、前記自車両の車速が、所定の車速以上の場合に前記駐車禁止エリアである旨の報知を抑制し、所定の車速未満の場合に前記駐車禁止エリアである旨の報知を行う機能を備えており、
前記重要度の高いものほど前記所定の車速を高い設定にすることを特徴とする請求項4または5に記載の駐車禁止エリア報知装置。
【請求項7】
請求項1から6のいずれかに記載の駐車禁止エリア報知装置における前記報知制御機能をコンピュータに実現させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−79977(P2013−79977A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2013−222(P2013−222)
【出願日】平成25年1月4日(2013.1.4)
【分割の表示】特願2008−63989(P2008−63989)の分割
【原出願日】平成20年3月13日(2008.3.13)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成25年1月4日(2013.1.4)
【分割の表示】特願2008−63989(P2008−63989)の分割
【原出願日】平成20年3月13日(2008.3.13)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(391001848)株式会社ユピテル (238)
【Fターム(参考)】
[ Back to top ]