
魚釣りリアルゲームシステム
【課題】実際の場と遠隔の場との間での双方のアクションがフィードバックされる技術により、実際の釣り場で行う釣りを遠隔仮想の釣り場においてライブで体験できるゲームシステムを提供する。
【解決手段】モーションスティック4は、受信した張力データに応じた加速度を加速度発生手段により発生させて、釣り糸の張力を再現し、電動リール機構は、受信した回転データに応じて回転し、アクチュエーター機構は、受信した動きデータに応じた釣竿1を動かすことによってモーションスティック4の動きを再現する。
【解決手段】モーションスティック4は、受信した張力データに応じた加速度を加速度発生手段により発生させて、釣り糸の張力を再現し、電動リール機構は、受信した回転データに応じて回転し、アクチュエーター機構は、受信した動きデータに応じた釣竿1を動かすことによってモーションスティック4の動きを再現する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、実際の場で起きた事象を遠隔の場に再現かつ体感させ、同時に、遠隔の場における操作を実際の場に再現させるための、特に実際の場と遠隔の場の双方方向におけるアクションフィードバックの技術に関する。
【背景技術】
【0002】
マイクロプロセッサを利用するゲーム機器やゲームシステムは、ハード/ソフトの性能向上とコストダウンをベースに誕生し、コンピュータグラフィックス技術の発達に従い、高度化してきた。メカトロニクス技術は、遠隔操作機器の多様化を促し、シミュレーション技術も同様の恩恵を受け、人や物の動きを再現し、この分野における多くのノウハウを蓄積しつつある。これらの技術が集合し、仮想現実が出現すると、ゲームシステムは益々発展・拡大し、ゲームが提供する仮想の世界において、ユーザがアクションや動きを伴ってゲームに参加することが望まれ、実現した。また、インターネット、無線LAN、近接無線通信もゲーム、シミュレーションシステム、及び遠隔システムなどに取り込まれ、相乗効果を生んでいる。ゲームでは、モーションを検出する加速度センサーを始めとして各種のセンシング技術が多種多様のセンサーを生み出し、市場に提供している。更に、MEMSを生み出した半導体組立て技術の目覚しい技術革新により、チップ化したセンサーがゲームコントローラにも利用できるようになった。このような背景から、実際の場に対して遠隔の場から操作する提案や、仮想の場で現実のごとく体感する仮想現実応用のゲームの提案や、現物を遠隔操作し、臨場体験をするシミュレーション玩具の提案などがなされてきた。
【0003】
特許文献1は、釣り用リールの制御を赤外線を利用してコードレスで遠隔操作する発明である。操作の指示はリモコンのスイッチで行なうので、遠隔の場所でリールを模した装置を使用するわけではない。この類型には、隔離された機器に対して、当該機器を模した機器を操作者が使用し、動かすと隔離された機器の動きも同様の動きをする技術も開発されている。この技術はセンサー技術の向上と多種多様なセンサーの出現により、人の動きをそのまま真似をするロボットや、危険物を扱うマニピュレーターとして実用化されている。特許文献2は、釣りの感覚を再現するゲーム装置の発明である。釣りの対象は実際の魚ではなく、画面に表示される架空の魚であり、レバー操作により画面上の架空の釣竿を動かして釣りを行なう。また、リールを模した機器を備えてあり、ハンドルを手で回転させてリール操作を行なう。魚が掛るとリールにブレーキが掛り、かつワイヤーに加わる張力が魚の引きを現出する。このように魚との駆け引きも可能であり、現実の釣りの醍醐味を味わうことができる。特許文献3は、玩具を使用したシミュレーションゲームの発明である。操縦装置を遠隔操作して、玩具の戦車を運転するゲームである。テレビ画面には戦車に搭載したカメラにより実際の景色が映し出されるので、あたかも自分が戦車に搭乗しているような臨場感を得られる。対戦も可能であり、敵に対して、射撃などの働きかけを行い、敵からも応射があるなど、音、光のフィードバックがある点で通常のシミュレーションゲームとは異なる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−125545号公報
【特許文献2】実開平11−226261号公報
【特許文献3】実開2004−105631号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の方法は、遠隔操作に過ぎず、実際の魚が掛ってもアタリや引きの反応はない。魚の反応を操作者が実感するわけではないので駆け引きの余地はなく、臨場感に乏しい。特許文献2の方法は、働きかけに対して反応があり、反応を感覚として実感を得ることができるが、対象が架空であるため、操作者の動きが遠隔操作によって働きかけたものではない。特許文献3の方法は、実際の事物を遠隔操作によって動かし、その反応が返ってくる点で臨場感溢れるものであるが、返って来る反応は、音や映像に限定され、動きが返るものではない。
【0006】
ゲームが高度化され、ゲームの中に操作者のアクションを取り込むものが出現するようになった。ゲーム用のコントローラに加速度センサーを内蔵させて動かすと、そのコントローラの動きそのものがゲームのキャラクタや仮想の事物に伝わり、コントローラの動きに合わせた反応がゲームのキャラクタから返るものが市販されている。また、操作者の位置をゲームの中に取り込み、ゲーム内の相対的な位置に置き換え、ゲームの世界に操作者が参加する仕組みのものも現れた。しかし、操作者からの働きかけのインプットは実現しても、その反応であるアウトプットは音や光や映像に過ぎない。剣でキャラクタを斬れば、斬った手ごたえがあるわけではなく、テニスのボールを打ち返してもボールの当たる衝撃があるわけでもない。せいぜい振動による擬似的な体感を与えるに過ぎない。
【0007】
本発明は、上記の問題を解決するためになされたものである。例えば、凍てついた湖の氷上で行なうワカサギ釣りを暖かい室内でライブ映像を見ながら、釣竿を模したモーションスティックにより実際の釣り体験を得ることができればどうであろうか。モーションスティックで釣竿を操る動きはそのまま現地の釣竿の動きになり、魚が掛れば、そのアタリや引きがモーションスティックに伝えられ、魚の釣り上げを遠隔で体感するのである。リール操作も遠隔で行ない、実際の電動リールを稼働させる。本発明は、実際の場の実際の物と遠隔の場における実際の物に見立てた物との間で、双方のアクションがフィードバックされる技術と実際の釣り場で行う釣りの感触を遠隔仮想の釣り場に伝える技術により、実際の釣り場で行う釣りを遠隔仮想の釣り場においてライブで体験できるゲームシステムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、本発明は以下の特徴を有する。
【0009】
本発明である魚釣りリアルゲームシステムは、次の構成からなる。
1)釣り糸の張力を検出する張力データ検出手段と回転データを受けて回転する電動リール機構と張力データを送信し、回転データを受信する第1の通信手段とを備えた釣竿
2)この釣竿を装着し、動きデータを受けてこの釣竿を上下及び左右に動かすアクチュエーター機構と動きデータを受信する第2の通信手段とを備えた釣竿支持台
3)釣竿を使用する実際の釣り場を撮影し、ライブ映像を送信する第3の通信手段を備えた撮影機
4)このライブ映像を受信・表示する第4の通信手段を有する端末装置
5)自己の動きを検出する動きデータ検出手段と自己に加速度を生じさせる加速度発生手段と回転データを生成する仮想リール手段とを備え、かつ動きデータと回転データを送信し、張力データを受信する第5の通信手段を有する釣竿に見立てたモーションスティック
を具備し、釣竿とモーションスティックとの間の双方のアクションフィードバックは次の実行による。
1)モーションスティックは、受信した張力データに応じた加速度を加速度発生手段により発生させて、釣り糸の張力を再現
2)電動リール機構は、受信した回転データに応じて回転
3)アクチュエーター機構は、受信した動きデータに応じた釣竿を動かすことによってモーションスティックの動きを再現
以上を特徴とする。
【0010】
また、本発明における加速度発生手段は、張力データの示す張力と同等の力でバネに結び付けられたおもりをワイヤーで引き、このワイヤーの引きを解放することにより、おもりが、伸長したバネを縮ませることにより加速度を発生させることを特徴とする。
【0011】
ただし、張力データの発生は、実際の釣り場であり、魚の引きが発生してからデータを送信し、モーションスティックに到着、おもりを引いて離すのでは遅すぎるかもしれない。また、魚が引いた釣り糸により、竿がしなる弾みなど微妙な張力変化もあり、釣竿とは物理的に異なるモーションスティックに同じ力を与えても同じ効果は生じない。そこで、ゲームとして、釣の醍醐味やより強い体感を優先するため、予め、ワイヤーを引いておくことにより、実際の魚のアタリや引きよりも強い加速度を与える方がゲーム効果は高い。なお、この加速度発生手段は、後述する実施形態では、アタリ再現モジュールと呼ぶ部品が相当する。更に、張力データは本発明の実施形態では、アタリの強さ又は引きの強さと表現されている。また、張力データには、時間情報を含むことが好ましい。
【0012】
また、本発明における張力データ検出手段は、釣り糸の引きの力を荷重センサーに伝え、この荷重センサーにより検出された圧力を前記張力データに格納することを特徴とするものである。圧力の検出は、釣り糸が荷重センサーを引くか、又は釣り糸の引きをフック等により荷重センサーを圧する仕掛けにするかを選択できる。
【0013】
上記とは別に、本発明における張力データ検出手段は、少なくとも1軸の加速度センサーを備え、加速度センサーが検出する引きによって生じた加速度を張力に換算し、張力データに格納することを特徴とするものもある。
【0014】
この手段は、直接の引きによる圧力ではなく、引きによって生じた加速度である。この場合、引きの力は、3次元に分散されるので、一つの次元の力だけでは不足することが多い。ただし、実際の引きは3方からくるので、より正確なデータを取得する場合には都合がよい。どちらの手段を採用するかは、モーションスティックの再現能力やゲーム効果を評価するとよい。
【0015】
また、本発明における仮想リール手段は、巻き取り回転ボタンと緩め回転ボタンの押下強度を速さ度合の数値として取得し、巻き取り方向又は緩める方向の区分情報と共に回転データに格納することを特徴とする。
【0016】
また、本発明における電動リール機構は、この回転データに含まれる巻き取り方向又は緩める方向の区分情報と速さの数値情報に基づき、電動リールを回転させることを特徴とする。
【0017】
モーションスティック側のリールをボタン等で代用する場合には、実際のリールの回転の速さや重さ、魚の引きによるブレーキの体感は生じない。従って、速い回転を欲する場合には強く押す心理に従い、押下の強さを回転の速さにした。強さの数値はリールのスピードのMAX/MINの範囲を相対的な値で割り振ると好ましい。なお、実際と似た回転式のリールをモーションスティックに装着する場合には、リールの回転の重さや引きによる回転のブレーキなどを再現することが好ましい。なお、回転データを本発明の実施形態では、リールボタン区分と強度と表現している。これは、モーションスティックの仮想のリールはリール回転を巻き取りボタンと緩めボタンで指示するからである。リール回転の速さはボタン押下の強さで指示するので、強度が情報になる。また、回転データには、押下の時間情報を含むことが好ましい。
【0018】
また、本発明における動きデータ検出手段は、少なくとも2軸の加速度センサーを備え、加速度センサーが検出するモーションスティックの動きにより生じた加速度の垂直成分と水平成分を動きデータに格納することを特徴とするものである。
【0019】
モーションスティックに加速度センサーを装着して、動きを検出するためには、最低3軸の加速度センサーが必要である。しかし、動きを再現する釣竿をアクチュエーターに装着した場合には釣竿は縦方向に振るか横方向に振るかの2軸しかない。この理由から、少なくとも2軸の加速度センサーでよいとした。釣竿をマニピュレーターに持たせる実施形態になると、3軸加速度センサーが必要になる。更に、くねくねした動きや微妙な振りや返しの動きを捉えることを意図すると、更に角速度センサー(ジャイロセンサー)による6軸が必要になる。また、ロボットを採用し、遠隔仮想釣り場の操作者の動きを再現しようとすると、位置情報が必要になる。そのため、磁気センサーや方位センサーを応用して、双方の絶対位置又はどちらかに合わせた相対位置を把握しなければならない。
【0020】
また、本発明におけるアクチュエーター機構は、この動きデータに含まれる加速度の垂直成分と水平成分を抽出し、指定された基準時間に基づき得られた移動距離に換算して、釣竿を上下方向と水平方向に移動させる制御を実行することを特徴とする。
【0021】
移動距離を直接計算したものは、モーションスティックの側の数値である。これをそのまま釣竿を装着したアクチュエーターに適用することは不自然である。両者は物理的に異なるからである。この距離はアクチュエーターに合わせた相対値となる。
【0022】
なお、これらを計算するときは事象データの発生に関する時間情報や時系列情報が必要になる。従って、相手に送信するデータには時間情報が含まれていなければならない。あるいは、一定の基準時間を双方で取り決めて、事象データは常に基準時間の数値であるとすれば、この限りではない。タイマーは一般にはマイクロプロセッサに内蔵されており、時間データを記録するのもマイクロプロセッサになる。
【0023】
時間情報は、例えば、加速度から移動距離を計算する場合に必要である。また、微妙な動きも単位時間当たりの加速度データを利用して、積分すれば動きを表現できる。モーションスティックの移動距離については、加速度センサーが捉える加速度の時間的変化により、スティックの移動位置が計算できるので、加速度と時間を動きデータに記録し、釣竿に送信する。再現するときは、再現する側が受けた相手のデータに基づき、自己の再現機器に相対的に再現することになる。この場合には、アクチュエーター側で加速度と時間の情報を自己の移動距離に換算する。換算する理由は、双方の機器の違い、環境の違いにより、全く同じスケールを当てはめるわけにはいかないからである。従って、再現側がデータに基づき、自己機器に合わせて再現することが好ましい。なお、動きデータを本発明の実施形態では、回転データと一括して送信するやり方を実施例に採用しているので、回転データと動きデータをまとめて、動き情報と呼んでいる。また、動きデータには、時間情報を含むことが好ましい。
【0024】
また、本発明における撮影機は、Webカメラ又はネットワークカメラを含むことを特徴とする。
【0025】
映像は動画であり、ライブ映像である。例えば、ONVIF(Open Network Video Interface Forum)というフォーラムではネットワーク製品のインターフェイスの規格を提供しており、この規格に基づき、サービス機関がライブ映像の中継サービスを行う。そのサービス機関の提供する規格に基づき、利用するカメラの種類や仕様が定まる。また、メディア、画像、更にはセキュリティも合わせる必要がある。映像はこのサービス機関に記録され、遠隔の仮想釣り場へ送信される。
【0026】
また、本発明における端末装置は、携帯情報端末、タブレット端末、ノートPC、PC、又はインターネットテレビを含むことを特徴とする。
【0027】
具体的には、スマートフォンを想定しているが、どこでもゲームが楽しめるようにモバイル端末であれば済む。
【0028】
また、本発明における第1から第4の通信手段が接続する回線は、有線若しくは無線によるインターネット、LANルータを介してインターネットと接続する有線若しくは無線LAN、又は高速モバイルルーターを介してインターネットと接続する無線LANを含むことを特徴とする。
【0029】
また、本発明における第5の通信手段が接続する回線は、端末を介してインターネットと結ぶ近接無線回線若しくは赤外線通信、無線によるインターネット、LANルータを介してインターネットと接続する無線LAN、又は高速モバイルルーターを介してインターネットと接続する無線LANを含むことを特徴とする。
【0030】
第5の回線は、モーションスティックと端末間における接続回線を指す。モーションスティックの使用状況から無線が好ましい。映像を見ながら釣を行うので、近接無線回線を使用する。この候補は、ブルートゥース(登録商標)、赤外線通信、あるいは、ZigBee(登録商標)であり、Wi−Fi(Wi Fi:登録商標)等も対象になる。
【発明の効果】
【0031】
本発明によれば、遠隔仮想の釣り場のモーションスティックの動きを実際の釣り場の釣竿に再現するように、遠隔の場の動きや力を実際の場に伝え、同様の動きや力として再現させる効果を奏する。
【0032】
また、実際の釣り場の魚のアタリや引きを遠隔仮想釣り場のモーションスティックに再現するように、実際の場の動きや力を遠隔の場に伝え、同様の動きや力として再現させる効果を奏する。
【0033】
この双方向のアクションフィードバックにより、魚釣りのゲームでは、実際の釣り場の様子をライブで見ながら、遠隔の場から釣竿を模したモーションスティックで釣竿を動かし、かつ、魚のアタリや引きを擬似的に体感できるので、次のアクションにつながり、結果的に高い臨場感を味わうことができる効果を奏する。
【0034】
また、本発明である「実際の感触をインターネット経由で遠隔地に伝えるシステム」は、ゲームシステムに限らず、インターネットで閲覧する商品の感触(肌触り)を消費者が実感できるシステムなど、他分野での利用範囲が広く考えられる。
【図面の簡単な説明】
【0035】
【図1】本発明の実施形態であるリアルゲームシステムの構成図である。
【図2】本発明の実施形態における実際の釣り場で使用する釣竿と遠隔仮想釣り場で使用するモーションスティック及びスマートフォンとの機器間情報交換の概念図である。
【図3】本発明の実施形態における実際の釣り場で使用する釣竿の斜視図である。
【図4】本発明の実施形態における実際の釣り場で使用する釣竿の釣竿制御ユニットの機能ブロック図である。
【図5】本発明の実施形態における遠隔仮想釣り場で使用するモーションスティックの外観及び内部機器構成図である。
【図6】本発明の実施形態における遠隔仮想釣り場で使用するモーションスティックのモーションスティック制御ユニットの機能ブロック図である。
【図7−1】本発明の実施形態における実際の釣り場で使用するモーションスティックに内蔵するアタリ再現モジュールの機能説明図の前半部分である。
【図7−2】同様に本発明の実施形態における実際の釣り場で使用するモーションスティックに内蔵するアタリ再現モジュールの機能説明図の後半部分である。
【図8】本発明の実施形態であるリアルゲームシステムにおいて実際の釣り場の動画を遠隔仮想釣り場のスマートフォンに送信する処理フローである。
【図9】本発明の実施形態であるリアルゲームシステムにおいて遠隔仮想釣り場のモーションスティックの操作を実際の釣り場の釣竿にフィードバックする処理フローである。
【図10】本発明の実施形態であるリアルゲームシステムにおいて実際の釣り場の釣竿の動きを遠隔仮想釣り場のモーションスティックにフィードバックする処理フローである。
【発明を実施するための形態】
【0036】
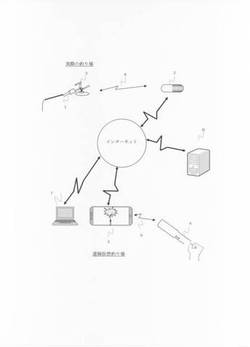
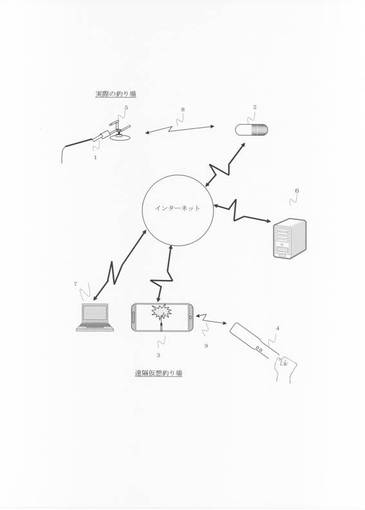
図1を参照し、本発明である魚釣りリアルゲームの実施形態を説明する。実際の釣り場は、湖での釣り、川釣り、海釣りなどの自然の場や釣堀のような人造の場を問わず、高速モバイルルーターを経由してインターネットが利用できる場所であればどこでもよい。一方、遠隔仮想釣り場は、スマートフォンやタブレットのような高速モバイル通信対応の携帯情報端末であれば、屋内、屋外を問わず、利用可能である。ただし、追加課金請求されない無線LANでの接続利用が好ましい。PCやインターネットTVも簡単に持ち運びはできないが、一定条件の下、利用できる。勿論、大きな画面を使用できるので、より高い臨場感を得られる。実際の釣り場には釣竿1に餌を付けたり、餌の付いた釣り糸を水面にたらす準備作業、及び釣った魚を魚籠に入れる後作業は人間が行なうが実際の釣りは無人であり、釣りの操作は遠隔仮想釣り場からの遠隔操作により実施される。前述準備作業と後作業も自動化は可能であるが、本発明は触れない。
【0037】
実際の釣り場の状況は、Webカメラ5又はネットワークカメラから撮影し、高速モバイルルーター2を介してインターネット経由で、遠隔仮想釣り場のスマートフォン3又はPC7に動画送信する。Webカメラ5等は、無線LAN8で高速モバイルルーター2と通信する。映像は通信速度により、モノクロ又はカラーを使用するが、切り替えができることが好ましい。動画送信と釣竿1の動き、遠隔仮想釣り場のモーションスティック4の操作情報も瞬時に送受信する必要から、高速モバイルルーターは高速の仕様が好ましい。高速モバイルルーターと釣竿1やWebカメラ5との通信はWi−Fiによる無線LAN8が好ましい。この場合、釣竿1やWebカメラ5はWi−Fi対応機種である必要があるが、屋内、屋外に関わらず、広い領域でインターネット接続が可能になる。実際の釣り場の状況を撮影する場所は、釣竿1、釣竿1装着の電動リール31の上方、又は付近の釣り状況を俯瞰できる高所でもよい。なお、釣竿1からWebカメラ5等は制御されるので、両者が離れた場所に位置する場合は、両者をブルートゥース、赤外線、又は無線LANによる近接無線通信で接続する必要がある。一方、釣竿1とWebカメラ5の両者が独立して無線LANによる近接無線通信で高速モバイルルーター2を介してインターネットにアクセスする形態もある。また、Webカメラ5を釣竿1の支持台に装着し、空間を上下・左右・前後(又はズーム)に可動できる機構にして、遠隔仮想釣り場から絶好のアングルを選択可能にしてもよい。更に、図示していないが、複数のWebカメラ5等を配置し、様々なアングル、画面サイズの映像を遠隔仮想釣り場から随時選択できる仕組みも可能である。
【0038】
映像は、Live映像配信サービス6との認証情報の交換、デバイス、イメージ、メディアなどの制御情報の設定や定義、情報取得方法等の情報交換を通じて、送信ができる。また、同様に、スマートフォン3やPC7も同様の認証や制御情報の交換を実施して、映像の受信ができる。ONVIF(Open Netoork Video Interface Forum)などのネットワークカメラのインターフェイス規格に基づき、Webサービスとして利用する手段があり、本実施形態に取り込むと有用である。
【0039】
なお、実際の釣り場は、複数の場所を想定していることを前述した。図示していないが、本実施形態の実行に先立ち、遠隔仮想釣り場において、利用者が、釣り場を画面選択することも可能である。鮎と鯛では、釣り場の状態、更に、アタリや引きに違いがある。釣竿1の検出信号の相違を、モーションスティック4にフィードバックし、モーションスティック4の反応や操作も相応のフィードバックを起こさねばならない。この相違点を基準値として初期設定する必要がある。これらも本実施形態に網羅されるべき機能である。本実施例では一つの釣り場における釣りを例示しているが、本発明が具体化すると、鯛釣りが終わった後、同じ場所で、鮎釣りを楽しむことができる。それも本物の鮎と鯛であり、釣った魚を送ってもらうサービスがあればユーザに喜ばれるだろう。
【0040】
遠隔仮想釣り場の利用者は、実際の釣り場の状況をスマートフォン3又はPC7の映像で確認しながら、釣りを楽しむ。遠隔仮想釣り場のモーションスティック4は実際の釣り場の釣竿1に模せられている。モーションスティック4の3次元の動きは、釣竿1にフィードバックされる。これは、モーションスティック4に内蔵した加速度センサー等の動きを捉えるセンサーの働きによる。加速度センサーを使用する場合は、前後・左右・上下の3方向の加速度を検出する3軸加速度センサーが好ましい。3次元の動きを検出するセンサーであるが、演算処理を加えることにより、モーションスティック4の傾きも計算できる。くねくねした微妙な動きは角速度センサーとのセンサーフュージョンによる処理が必要であり、より正確な動きをフィードバックすることができる。ただし、現場の状況と遠隔地の状況は異なり、また、実際の釣竿1とモーションスティック4の形態の違いから、正確なアクションのフィードバックは意味を為さないとも考えられる。
【0041】
釣竿1は、支持台に固定されるが、本実施形態では、釣竿の空間移動をアクチュエーターで実現する。支持台自体が可動したり、支持台が固定であってもアクチュエーターが3軸の可動機構になっていれば、3軸での移動を制御しなければならない。釣りの形態から、支持台が固定された方が有利である。また、アクチュエーターは垂直の変位と水平の変位ができれば十分である。ただし、実際には、釣竿先端を見れば3次元の変位を起こしている。一方、傾きを含めたモーションスティック4のすべての動きをフィードバックするためには、可動式支持台が必要になる。また、モーションスティック4全体の相対位置と動きを完全にフィードバックするためには、釣竿1は支持台ではなく、ロボット機構によるマニピュレーター機構が備わっていなければならない。本発明は、魚釣りのリアルゲームを対象とするので、モーションスティック4の変位と動きを釣竿1の先端に反映すれば足りる。従って、本実施形態では固定支持台を採用している。
【0042】
図1では、モーションスティック4の動作による3軸のベクトル成分をスマートフォン3に転送し、スマートフォン3からインターネットを経由して高速モバイルルーター2にデータが到着する。高速モバイルルーター2はこのデータを無線LAN8に乗せ、釣竿1の制御系に送信する。データの種類は異なるが映像データも同じ無線LAN8を介してデータ授受を行い、無線LAN8からインターネットに接続される。ただし、一方、釣竿1とWebカメラ5の両者が独立してそれぞれ無線LAN8、無線LAN8−1による近接無線通信で高速モバイルルーター2を介してインターネットにアクセスする形態もあり、より好ましい。また、モーションスティック4とスマートフォン3の間は、ブルートゥース通信9又は赤外線通信等の短距離の無線回線を使用する。なお、モーションスティック4が無線LANインターフェイスを有する場合には、遠隔仮想釣り場に高速モバイルルーターを持ち込み、スマートフォン3とデータ授受を行い、かつスマートフォン3を経由せずに、インターネット/高速モバイルルーター網に接続することもできる。なお、図1には記載していないが、スマートフォン3の代わりにPC7との近距離無線通信も当然に可能であり、モーションスティック4と情報授受を行い、リアルゲームを進行させることができる。
【0043】
なお、モーションスティック4には、仮想のリール機能があり、ボタンで、巻き取りやリールの巻き戻し(緩み)を行なう。このリールの操作もモーションスティック4の動きデータと共に釣竿1へ送られ、釣竿1の電動リール31の操作に再現される。
【0044】
また、本発明は、モーションスティック4無しに、スマートフォン3やPC7の画面の中で、仮想の釣竿を動かし、かつ、リール操作を行い、釣りのリアルゲームを進めることもできる。
【0045】
釣竿1には、魚が餌を銜えたときの‘アタリ’を感知するセンサーを備えてある。このアタリの強さにより、真のアタリかを釣竿1は判断し、真のアタリの場合には、自律的に釣竿を引き上げ、かつ、自律的にリールを巻く。この自律的な動作や操作の設定は、遠隔の地にいる操作者に伝え、操作者がアタリに反応するまでの時間が魚の反応に追いつかないための支援機能が必要になるからである。アタリを検出すると、その情報は、高速モバイルルーター2、インターネット及びスマートフォン3を経由してモーションスティック4に到着する。
【0046】
釣竿1のアタリセンサーは、荷重センサーが好ましい。荷重センサーはアタリの強さや魚の引きの強さを正確に検出できるからである。荷重センサーの代わりに加速度センサーを使用してもよいが、アタリや引きの強さを計算する必要がある。なお、アタリや引きを3次元のベクトル成分でデータ表現する場合には、加速度センサーが好適である。なお、アタリや引きは、魚により相違があるので、釣竿1のアタリ判断やアタリの後の自律的な釣竿の合わせ(釣竿を上方へ上げるなど)や電動リールの巻き取り操作を魚や釣り場の環境に合わせる必要がある。従って、実施形態を汎用的に構成するためには、システム開始の初期に釣り場環境と対象の魚(複数)の基準となるデータを設定する機能が必要である。
【0047】
釣竿1からのアタリの情報が、モーションスティック4に届くとモーションスティック4にアタリの擬似的な衝撃を与えるため、モーションスティック4に内蔵したアタリ再現モジュールを稼動させる。このアタリ再現モジュールはモーションスティック4が操作者と反対の方向に強い加速度を与えるものである必要がある。例えば、おもりが前方に飛び出すメカの仕掛けや、前方から磁力で引っ張るような電磁気の仕掛けを想定することができる。また、釣り糸に模した糸を外部に結び、モーションスティック4から電動で引っ張る方法でもよい。
【0048】
アタリの後に、魚は釣り糸を引っ張り逃れようとする。アタリと同じく、引きも強さに応じた擬似的な力をモーションスティック4に再現する必要がある。引きはアタリと同じ性質の力なので、釣竿1の荷重センサー又は加速度センサーが検出し、モーションスティック4に伝え、強さに応じた引きの状態をアタリ再現モジュールで再現することができる。ただし、アタリは1回であるが、引きは間歇的、継続的なため、断続的な加速度を生じさせる機構が必要になる。アタリがくると、直後に引きのデータが釣竿1から来ると同時に、モーションスティック4からも、スティックの動きとリール操作のデータを頻繁に釣竿1に送るため、データ送受信が激しく行われる。なお、魚がかかっているときは引きがあるので、引きに応じた振動をモーションスティック4に与え、釣りの体感性を擬似的に高めてもよい。
【実施例1】
【0049】
図1において本発明の取り得る実施形態を説明した。図2〜図10は、本発明を実施する一事例を構成したものである。本実施例では、実際の釣り場はワカサギ釣りであり、固定の支持台に取り付けられた釣竿1を使用して、湖の氷原の一画に空けた穴からワカサギを釣るものである。
【0050】
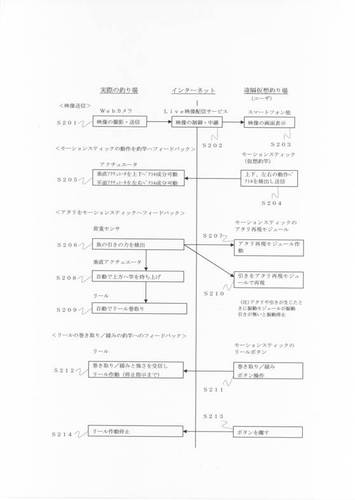
まず、図2を参照して、本発明の実施形態における実際の釣り場で使用する釣竿1と遠隔仮想釣り場で使用するモーションスティック4及びスマートフォン3との機器間情報交換の概念を説明する。実際の釣り場の映像は、釣竿1に装着したWebカメラ5による。Webカメラ5が撮影した動画は、高速モバイルルーター2を介してインターネット経由でLive映像配信サービス6に送られ(S201)、Live映像配信サービス6のDBに蓄積される(S202)。遠隔仮想釣り場の操作者は、スマートフォン3から、Live映像配信サービス6に対して、実際の釣り場の映像送信を要求する。操作者はスマートフォン3に映し出された映像により、釣り場の状況を把握することができる(S203)。
【0051】
モーションスティック4は仮想の釣竿である。本実施例では、モーションスティック4に内蔵した加速度センサー56が3軸の動きのベクトル成分を検出し、モーションスティック4の上下、左右の動きを数値データとして釣竿1に送信する(S204)。S205において、釣竿1は受信したモーションスティック4の動きデータから上下方向のベクトル成分を抽出し、上下の変位に換算して、釣竿1の支持台の垂直アクチュエーター33に変位分の可動をさせる。同じく、動きデータから左右方向のベクトル成分を抽出し、左右の変位に換算して、釣竿1の支持台の水平アクチュエーター33に変位分の可動をさせる。これにより、釣竿1、特に釣竿先端は、モーションスティック4の動きの上下、左右方向を再現する。
【0052】
魚が餌を銜えたアタリが起きると荷重センサー35は引きの強さを検出する(S206)。釣竿1のマイクロプロセッサ(釣竿制御)40はアタリと判定するとモーションスティック4へ送信する。S207において、モーションスティック4はアタリの引きと判定し、アタリ再現モジュール58を起動し、アタリをフィードバック再現する。釣竿1では、垂直アクチュエーター33を指定の変位分上方へ自律的に可動させる(S208)。また、釣竿1では、魚の引きに合わせて自律的に電動リールを指定された強さで指定分の長さを巻き取る(S209)。引きはモーションスティック4にも次々と送信され(S206)、アタリ再現モジュール58が引きの強さに応じて、フィードバック再現する(S210)。
【0053】
モーションスティック4の仮想リールの操作は、リール緩めボタン53とリール巻き取りボタン54で行なう。リールの巻き取り又は緩め(巻き戻し)のデータを強さと一緒に釣竿1へ送信する(S211)。釣竿1では、リールの巻き取り又は緩め(巻き戻し)の区別と強さに応じた長さ分の可動を電動リール31に行なう(S212)。リールボタンは、離せば、強さはゼロになる(S213)。この情報が釣竿1に送信されると、電動リール31は停止する(S214)。なお、引きのデータが送られているときは、振動モジュール59による振動を銜えて、いっそうの臨場感を現出させてもよい。
【0054】
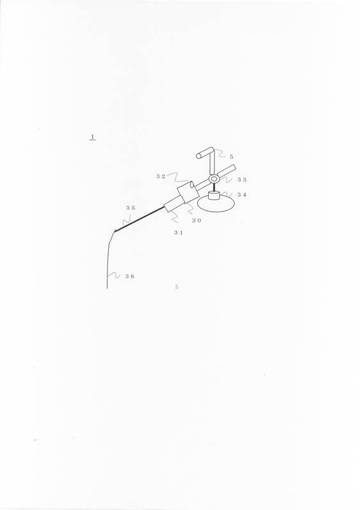
図3は、実際の釣り場で使用する釣竿1の斜視図である。本実施例では釣竿1を支持台上に固定する。しかし、垂直アクチュエーター33は釣竿1の釣竿制御ユニット30の制御により上下に可動し、水平アクチュエーター34も釣竿制御ユニット30の制御により左右に可動するのでモーションスティック4の動きをフィードバックすることができる。なお、釣竿に限っていえば、前後の動きは少ないが3次元方向に動くことになる。
釣竿には荷重センサー35が装着されており、魚のアタリ及び引きを釣り糸36を介して検出し、その強さを釣竿制御ユニット30に伝える。Webカメラ5は本実施例では釣竿1の上部に装着する形態をとる。Webカメラ5が釣竿制御ユニット30に制御されて同じ無線LAN8を利用する場合には無線LANアンテナ32はWebカメラ5が撮影した映像を釣竿制御ユニット30を介して高速モバイルルーター2に送信し、かつ、釣竿1の事象情報やモーションスティック4の操作情報を無線LAN8、高速モバイルルーター2、インターネットを介して授受する機能を有する。一方、釣竿1とWebカメラ5の両者が独立して無線LANによる近接無線通信で高速モバイルルーター2を介してインターネットにアクセスする形態もある。この場合には、釣竿1は無線LAN8、Webカメラ5は無線LAN8−1と近接無線通信も独立する。電動リール31は、現実のリールであり、釣竿制御ユニット30により、巻き取りと緩め(巻き戻し)を実行する。また、モーションスティック4の仮想リールからの操作情報がこの機器にフィードバックする。釣竿制御ユニット30は、釣竿1が無人で作動するために適切な制御をし、その情報をモーションスティック4に送信すると共に、モーションスティック4の操作を釣竿1にフィードバックして再現する制御を行なう。なお、荷重センサーは釣り糸に接続されるので、釣竿のどこに配置してもかまわないが、荷重センサーの代わりに加速度センサーを使用する場合は、加速度から引きの強さを検出するため、釣竿の先端に近いほど好都合である。ただし、釣竿のしなりがノイズとして影響するので、釣竿と電動リールの間を移動可能にして、最適な動きを検出する箇所を探すとよい。
【0055】
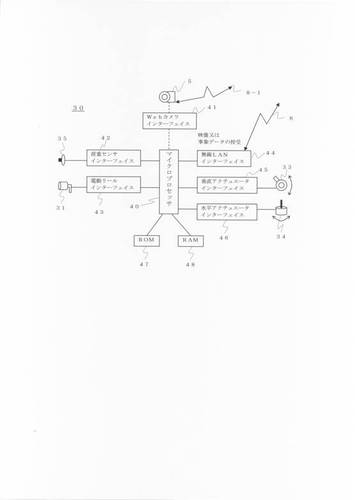
図4は、釣竿1の釣竿制御ユニット30の機能ブロック図である。釣竿1の各機器の制御は、マイクロプロセッサ(釣竿制御)40が実行する。マイクロプロセッサ(釣竿制御)40は、ROM(釣竿制御)47に格納したプログラムをRAM(釣竿制御)48にロードしRAM(釣竿制御)48に設けたワークエリア、定義値等を使用してプログラムを実行する。釣竿制御ユニット30は、各機器のインターフェイスを介して、各機器を制御する。Webカメラインターフェイス41はWebカメラ5との制御データの授受を行なう。荷重センサーインターフェイス42は、荷重センサー35の検出データをマイクロプロセッサ(釣竿制御)40に伝える。電動リールインターフェイス43は、電動リール31の巻き取り及び緩めについて、その強さ、スピードを含めてマイクロプロセッサ(釣竿制御)40の命令を電動リール31に伝える。垂直アクチュエーターインターフェイス45は、マイクロプロセッサ(釣竿制御)40が指令した垂直アクチュエーター33へ可動の長さを伝える。マイクロプロセッサ(釣竿制御)40は、モーションスティック4から送信された上下方向のベクトル成分を可動長に換算する。水平アクチュエーターインターフェイス46は、マイクロプロセッサ(釣竿制御)40が指令した水平アクチュエーター34へ可動の長さを伝える。マイクロプロセッサ(釣竿制御)40は、モーションスティック4から送信され左右方向のベクトル成分を可動長に換算する。無線LANインターフェイス44は、無線LANアンテナ32で授受する無線LAN8の通信データや制御データをコントロールし、マイクロプロセッサ(釣竿制御)40に伝える。マイクロプロセッサ(釣竿制御)40は、モーションスティック4とのアクションのフィードバックに関する情報を無線LANインターフェイス44で受け継ぎ、各機器のインターフェイスに処理結果と制御命令を伝える。また、各機器からのデータを制御し受け継ぎ、無線LANインターフェイス44を介して、送信する。
【0056】
なお、タイマーを図示していないが、タイマーはマイクロプロセッサ(釣竿制御)40はタイマーを内蔵しているものとする。タイマーは、例えば、釣竿内の事象から発生したアタリや引きの時間的変化の記録に使用する。この情報を張力情報とともに記録し、モーションスティックに送れば、アタリや引きの再現に役立つからである。
【0057】
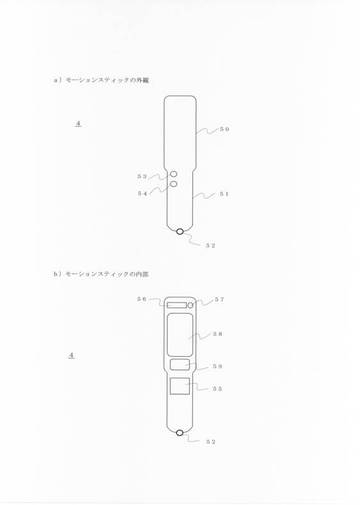
図5は、遠隔仮想釣り場で使用するモーションスティック4の外観及び内部機器構成図である。a)はモーションスティック4の外観図である。スティック筐体50は、モーションスティック4の機構を保護する構造を有する。握り柄51は片手でモーションスティック4を持つ柄である。ここにはリール緩めボタン53とリール巻き取りボタン54が装着してあり、仮想のリールを緩めたり(巻き戻し)、巻き取ったりする指示をする。オン/オフスイッチ52はモーションスティック4の電源のオンオフを行なう。b)はモーションスティック4の内部の構造の概観である。先端部に加速度センサーモジュール56とブルートゥースモジュール57がある。加速度センサーモジュール56はモーションスティック4の動きを捉える働きがある。ブルートゥースモジュール57は、スマートフォン3との近距離無線通信を実行する。アタリ再現モジュール58は、モーションスティック4を前方に押し出す機能を有し、アタリや引きを再現する。振動モジュール59は、振動を発生させるものであり、本実施例では、引きがあるアタリやその後の断続的な引きが生じているときに引きと同時に振動を加えて引きを擬似的に再現することに利用する。モーションスティック制御ユニット55は、モーションスティック4を制御し、各機器の起動や停止を行なう。
【0058】
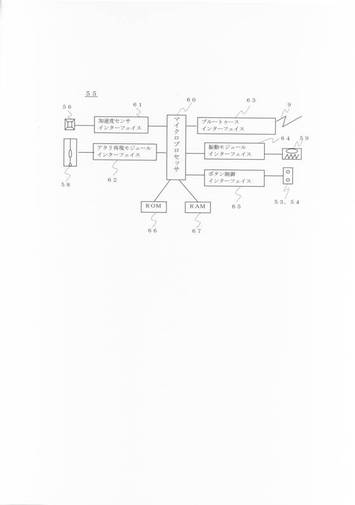
図6は、モーションスティック4のモーションスティック制御ユニット55の機能ブロック図である。モーションスティック4の各機器の制御は、マイクロプロセッサ(モーションスティック制御)60が実行する。マイクロプロセッサ(モーションスティック制御)60は、ROM(モーションスティック制御)66に格納したプログラムをRAM(モーションスティック制御)67にロードしRAM(モーションスティック制御)67に設けたワークエリア、定義値等を使用してプログラムを実行する。マイクロプロセッサ(モーションスティック制御)60は、各機器のインターフェイスを介して、各機器を制御する。加速度センサーインターフェイス61は、加速度センサーモジュール56が感知したモーションスティック4の動きを3軸の加速度で捉えて、その上下・左右・前後のベクトル成分を数値としてマイクロプロセッサ(モーションスティック制御)60に伝える。なお、加速度センサーモジュール56は3次元のベクトル成分を検出するが、本実施例の釣竿1は支持台固定なので、上下と左右のベクトル成分を使用する。アタリ再現モジュールインターフェイス62は、マイクロプロセッサ(モーションスティック制御)60が制御する命令をアタリ再現モジュール58へ伝える。アタリ再現モジュール58は、アタリにおける引きやその後の断続的な引きを、おもりの移動で再現するものである。振動モジュールインターフェイス64は、マイクロプロセッサ(モーションスティック制御)60の命令を振動モジュール59に伝える。本実施例では、釣竿1からのアクションフィードバックにおいて、引きがあったときに、操作者に引きを効果的に体感させるために振動を加えている。なお、振動の程度も引きの強弱に応じる。ボタン制御インターフェイス65は、リール緩めボタン53とリール巻き取りボタン54のボタンの押下及びその強さをマイクロプロセッサ(モーションスティック制御)60に伝える。マイクロプロセッサ(モーションスティック制御)60は、スマートフォン3との情報交換をブルートゥース通信9で行なう。ブルートゥースインターフェイス63は、ブルートゥース通信9の制御及びデータの授受の役割を有する。
【0059】
なお、タイマーを図示していないが、タイマーはマイクロプロセッサ(モーションスティック制御)60にタイマーを内蔵しているものとする。タイマーは、例えば、モーションスティックの動きならば、加速度センサーが捉える加速度の時間的変化により、スティックの移動位置が計算できる。加速度と時間はデータとして記録し、釣竿に送信する。再現するときは、再現する側が受けた相手のデータに基づき、自己の再現機器に相対的に再現することになる。即ち、双方の機器の違い、環境の違いにより、全く同じスケールを当てはめるわけにはいかないからである。従って、再現側がデータに基づき、自己機器に合わせて再現することが好ましい。
【0060】
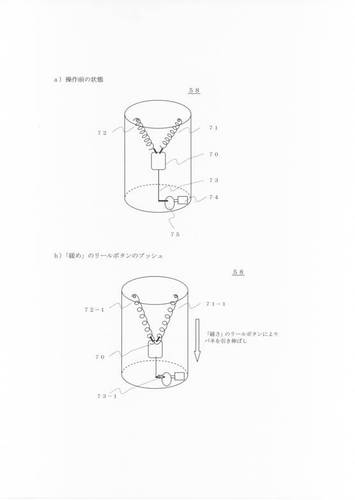
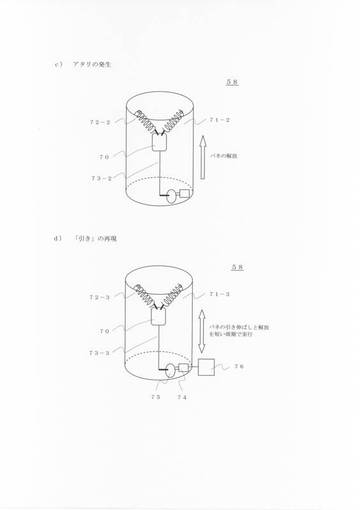
図7−1及び図7−2は、モーションスティック4に内蔵するアタリ再現モジュール58の機能説明図である。
【0061】
a)は、フラットな状態のときのアタリ再現モジュール58である。おもり70はバネ1番71とバネ2番72に結ばれている。このバネ2本と逆方向にワイヤー73がおもりを結び、平衡している。更にワイヤー73はプーリー75に巻き取られるように、プーリー75に結ばれている。ワイヤー73のプーリー75への巻き取り又は巻き戻しはモーター74が行なう。通常、アタリ再現モジュール58はアタリと引きに備えて、バネを伸ばし、おもり70をバネと反対方向に引き寄せておく。アタリや引きがあれば、おもり70の引き寄せを解放することにより、バネがおもり70を引き寄せ、このとき、バネ方向に加速度が生じ、モーションスティック4自体がバネ方向に引っ張られる。なお、実際の釣りでは、釣竿1の向きに対して、斜め下方から引きがある。斜め下方の引きを再現するならば、極力、実際の場の張力を同じ方向から発生させるべきである。しかし、本実施例では、この引きを荷重センサー55で検出するので、方向性は取得しない。即ち、引きで得た張力は、モーションスティック4の方向と180度逆の方向に反映される。また、アタリ再現モジュール58は、モーションスティック4の先端方向に向かって、引きを再現する。即ち、モーションスティック4の動きを検出する加速度センサーの前後の軸方向にこのアタリ再現モジュール58の加速度が加わることになる。しかし、本実施例では、前後軸の加速度はアクチュエーターに反映させていない。従って、理論上、アタリ再現モジュール58の衝撃は釣竿1に影響がないことになる。
【0062】
b)は、バネ1番71とバネ2番72が引き伸ばされた状態であるバネ1番(伸び)71−1とバネ2番(伸び)72−1が表示されている。また、ワイヤー73がプーリー75に巻き取られた状態であるワイヤー(巻き)73−1が表されている。なお、本実施例では、リール緩めボタン53が押されると、ワイヤー73が巻き取られ、バネが引き伸ばされる状態にする。この実行は、マイクロプロセッサ(モーションスティック制御)60が制御している。このようにすると、リールの緩めの後に、アタリや引きが発生し、次いでリールの巻取りがあるので、瞬時にアタリを再現でき、好都合だからである。
【0063】
c)は、アタリが発生したときのアタリ再現モジュール58の起動状態を表している。ワイヤー73が解放された状態であるワイヤー(緩み)73−2と、バネ1番71とバネ2番72がおもり70を引きつけ、縮んだ状態のバネ1番(縮み)71−2とバネ2番(縮み)72−2を表している。このとき、おもり70は強くバネに引っ張られ、バネの縮む方向に加速度が発生している。ワイヤー73方向にモーションスティック4を握っている操作者は引っ張られる感覚を覚える。引きの強さは、マイクロプロセッサ(モーションスティック制御)60がアタリ再現モジュールインターフェイス62に与え、モーター74が強さに応じてブレーキを掛ける仕組みである。なお、張力の再現は、マイクロプロセッサ(モーションスティック制御)60又はアタリ再現モジュールインターフェイス62がバネ1番71とバネ2番72の縮みの力とおもりの重さと縮みの方向を計算して、縮むときの長さ分を解放する。縮むときの長さはワイヤー73の解放の長さである。ただし、そのままを再現しても、実際の引きの実感は得られない恐れがある。これは、釣竿1とモーションスティック4の物理的相違から生ずると推測できる。従って、本実施例では振動モジュール59により、操作者の体感を疑似的、暗示的に補助している。更に引きの衝撃も強さを加えるとかの工夫も必要かもしれない。
【0064】
d)は、アタリの後の引きの場合のアタリ再現モジュール58のふるまいを表示したものである。引きは持続的又は断続的に起きるので、バネの引き伸ばしだけでは、すべての加速度を賄えない。そこで、ワイヤー73とバネとの間で引き伸ばしと縮みを繰り返して擬似的な引きを作り出す。例えば、ワイヤー73が巻き取られるときは等速度で、バネが縮むときは、数回に分けて、急速に縮ませると引きがかなり再現できる。このとき、モーター74の回転をモーター作動チョッパ76が断続的に行なう。この制御は、マイクロプロセッサ(モーションスティック制御)60が実行するモーター作動チョッパ76制御プログラムによる。
【0065】
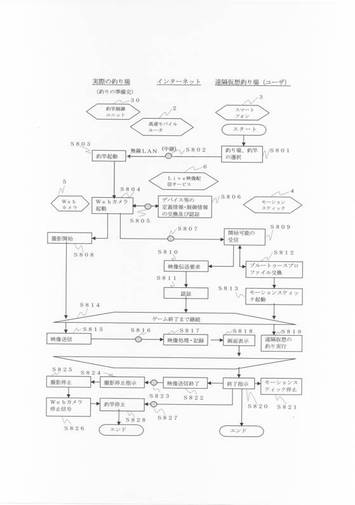
図8は、本発明の実施形態であるリアルゲームシステムにおいて実際の釣り場の動画を遠隔仮想釣り場のスマートフォンに送信する処理フローである。図8を参照して、実際の釣り場における釣りの状況を撮影して、映像を送る本実施例の方法を説明する。
【0066】
本実施例では、釣りの開始の所期設定として、スマートフォン3により、釣り場や釣竿を選択する(S801)。この選択により、予め準備された釣り場の環境や釣り対象の魚による基準値が設定される。基準値とは、アタリの判定基準である引きの強さや波などの紛らわしいノイズによる引きの除去などが相当する。また、釣竿1の性能等からくるアクションをフィードバックする換算値も含まれる。更に重要な設定値として、モーションスティック4の動きやリールボタンのデータ送信の周期時間単位や、引きのデータ送信の周期時間単位である。これらは、通常、ネットワーク速度や機器の性質により決定されているシステム提供値を採用するが、学習的に最適値に近づけるなどの手段を含めてもよい。選択された釣り場と釣竿1へ基準値等を送信する。送信情報は、スマートフォン3からインターネットを介して、高速モバイルルーター2に到達し(S802)、ここから無線LAN8を介して目的の釣竿1に送られる。釣竿制御ユニット30は送信情報を解析し、必要な情報をセットし、釣竿1を起動させる(S803)。
【0067】
釣竿制御ユニット30は、Webカメラ5を起動させる(S804)。これは、釣竿制御ユニット30がWebカメラ5を制御し、無線LAN8共有して使用する形態である。釣竿1とWebカメラ5が独立して無線LANを利用する場合には、図8の制御は不要になり、それぞれの通信フローに基づき、交信する。Webカメラ5(釣竿制御ユニット30とWebカメラインターフェイス41が実行)は、Live映像配信サービス6と認証、デバイス定義、メディア定義、映像仕様などの制御情報を交換し、撮影した映像の記録を要求する(S806)。高速モバイルルーター2は、Webカメラ5とLive映像配信サービス6を中継(S805)する。Webカメラ5の撮影が可能になると、高速モバイルルーター2を経由して(S807)、釣りの開始をスマートフォン3に伝える(S809)。Webカメラ5も撮影を開始する(S808)。スマートフォン3からLive映像配信サービス6に実際の釣り場からの映像の送信を要求する(S810)。S811でLive映像配信サービス6から認証されると釣りのリアルゲームシステムが始まる。一方、スマートフォン3とモーションスティック4との間でブルートゥース通信9を行なうためのプロファイル交換を行なう(S812)。次いで、モーションスティック4が起動する(S813)。
【0068】
釣竿1とモーションスティック4の双方向のアクションフィードバックが可能になると映像の送信は本実施例の示す魚釣りリアルゲームの終了まで継続する(S814)。釣竿1に装着されたWebカメラ5からの映像が送信される(S815)。映像は高速モバイルルーター2を経由し(S816)、Live映像配信サービス6に送られ、画像処理され、記録される(S817)。Live映像配信サービス6からスマートフォン3へ映像がダウンロードされスマートフォン3画面に表示される(S818)。操作者はスマートフォン3の画面から実際の釣り場の状況が見え、遠隔仮想の釣りを楽しむことができる(S819)。
【0069】
操作者は、釣りを終了させたいときはスマートフォン3より終了の指示を出す(S820)。この終了指示は、モーションスティック4を停止させる(S821)。また、Live映像配信サービス6へ映像送信の終了を要求する。(S822)。この終了のモードはLive映像配信サービス6から高速モバイルルーター2を経由して(S823)、釣竿1に伝えられ、釣竿制御ユニット30は撮影停止をWebカメラ5に伝え(S824)、Webカメラ5は撮影を停止する(S825)。次いでWebカメラ5は停止信号を釣竿制御ユニット30に伝える(S826)。一方、スマートフォン3は遠隔仮想釣り場のシステムが停止することを高速モバイルルーター2経由(S827)で釣竿1に伝え、遠隔仮想釣り場のシステムを停止する。釣竿制御ユニット30は、釣竿1機能を停止し、実際の釣り場のシステムを停止する(S828)。なお、システムの停止の方法は様々のケースが想定しうる。実施例はその一例に過ぎない。
即ち、自発的にユーザがゲームを終了するケースに当たる。最も現実的な停止方法は、タイムアウトによるものである。複雑な関連機器を順次停止するよりも楽で合理的である。
【0070】
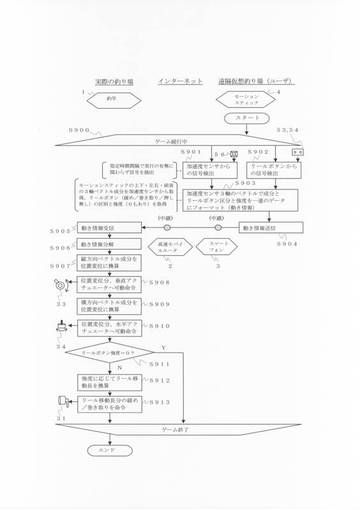
モーションスティック4の操作を釣竿1にフィードバックする処理フローである。本実施例では、モーションスティック4から釣竿1へアクションフィードバックを起こす事象をモーションスティック4の3次元の動きに対しては、その加速度を位置の変位に換算する演算を行う。即ち、垂直方向の上下動及び水平方向の左右の振りについて再現する。更に、モーションスティック4のリール緩めボタン53とリール巻き取りボタン54の押下による仮想リールの稼動を釣竿1の電動リール31に反映させる。また、リールの速さはボタンの押下強度である。モーションは瞬間、断続、連続があるが、モーション中の変化もあり得る。これらは、継続して加速度を検出し、演算しなければ正確な速度や変位は得られない。しかし、遠隔の場所にある他の物体にそのモーションを再現するのであるから、転送スピードや送信周期により、断片的なデータを与えることになり、正確性は損なわれる。しかも、両者の環境もモーション対象の物も同じ形態を取るわけではないので、完全な正確性は無意味である。そこで、本実施例においては、モーションスティック4の3次元の加速度と仮想リールのボタン押下種別とその強度を指定された周期で送信する手段を採用した。モーションやボタン押下の実行の有無に関わらず、一定の時間間隔でモーションデータを釣竿1に送るのである。即ち、モーションスティック4の上下・左右・前後の3軸ベクトル成分を加速度センサーモジュール56から取得し、かつ、リール緩めボタン53とリール巻き取りボタン54の仮想リールのボタンから緩め/巻き取り/押下無しの区別と強度(ゼロも有り)を取得し、モーション情報として、一括して釣竿1に送るのである。釣竿1ではこのデータを分解して、竿を動かし、リールに反映させる。これらのデータ送信はゲームが終了するまで続く。また、送信データは、モーションスティック4からブルートゥース通信9により、スマートフォン3に送り、スマートフォン3を経由して、インターネットに入り、次いで、高速モバイルルーター2を経由して無線LAN8により釣竿1に到達する。
【0071】
以下、図9の処理フローを説明する。モーションスティック4の加速度センサーモジュール56から3軸(上下・左右・前後)の加速度成分の信号を取得し(S901)、同時にリール緩めボタン53とリール巻き取りボタン54から、押下及び強度の信号を得る(S902)。S903において、加速度センサー3軸のベクトル成分とリールボタン区分と強度を一連のデータフォーマット動き情報と言う)にまとめる。動き情報を釣竿1へ送信する(S904)。
【0072】
釣竿1が動き情報を受信し(S905)、動き情報を分解する(S906)。まず、縦方向ベクトル成分を抽出し、位置変位の値に換算する(S907)。この縦方向の位置変位値を垂直アクチュエーター33に与え、可動させる(S908)。次に同じ動き情報から、横方向ベクトル成分を抽出し、位置変位の値に換算する(S909)。この横方向の位置変位値を水平アクチュエーター34に与え、可動させる(S908)。S910において、同じ動き情報から、リール情報を抽出し、仮想リールのボタン(リール緩めボタン53とリール巻き取りボタン54)のどちらが押下されたか、又ははどちらも押下していないか又はは押下強度がゼロかどうかを判断する(S911)。この場合、押下強度がゼロであれば、どちらも押下していないと判断してもよい。即ち、押下強度がゼロであれば、リール稼動は無い。押下強度がゼロでないならば、リール緩めボタン53が押下されたか、リール巻き取りボタン54が押下されたので、どちらかを判断し、その強度分のリール移動長を換算し(S912)、電動リール31を緩め又は巻き取る(S913)。S901からS913のふるまいは、ゲーム終了まで、データ送信の度に実行する。
【0073】
次に、釣竿1のモーションをモーションスティック4にフィードバックする処理について説明する。図10は、釣竿1の動きをモーションスティック4にフィードバックする処理フローである。釣竿1からモーションスティック4へのアクションフィードバックを行なうモーションは、魚が餌を銜え、アタリを荷重センサー35に発生させたときと、その後、引きを継続する場合である。アタリは最初の引きであり、その後の引きは、魚を釣り上げるか逃げられるかまで、断続的、連続的に起こる。引きが始まると、モーションスティック4の動き情報と同様に、一定時間間隔で周期的に引きの強度情報を送信し、モーションスティック4の引きのモーションとして再現させる。これが、モーションスティック4へのアクションフィードバックである。引きは釣竿1の荷重センサー35に掛る圧力であり、引きの方向は1軸ではなく、四方、即ち3軸になる。ただし、本実施例では、1個の荷重センサー35を使用するので、1軸の情報しか取得しない。なお、最初の引きであるアタリまでは、釣竿1からモーションスティック4へは動き情報を送信しない。アタリ以後は、指定時間間隔で引きの強度を送信する。釣竿1からの送信は、無線LAN8により、高速モバイルルーター2に到達し、高速モバイルルーター2経由でインターネットに入り、更にスマートフォン3経由でブルートゥース通信9によりモーションスティック4に到着するものである。
【0074】
以下、図10の処理フローを説明する。S1000は、魚を釣り上げるか、逃すか、又はゲームを終了するまで繰り返す。S1001において、荷重センサー35からの信号を待つ。信号があったとき、引きの強さがアタリ強度と設定した基準値より小さいかどうか判断する(S1002)。小さい場合は、ノイズとして無視する。アタリ基準値以上の場合は、アタリと判断し、釣り上げの実行モードに入る。魚のアタリには素早く反応しなければ、逃げられる。本発明は遠隔地とのアクションフィードバックの技術であるが、遠隔地にいる人間の操作者の応答を待つ余裕はないと想定し、魚への合わせは自律的に釣竿1が実行する機能を入れた。即ち、アタリになると、まず、垂直アクチュエーター33に上方へ一定の変位を起こさせる(S1003)。これは合わせであり、竿を上方に上げる。次にアタリの情報をモーションスティック4に送信する(S1004)。また、餌に魚が食いついたので、外れないように電動リール31を一定長分、巻き取る作業を自律的に実行する(S1005)。S1006において、この後の魚の引きは断続的、連続的にくるので、釣る上げまで、引きの強度(荷重センサー35の引っ張り)を検出し(S1007)、指定の時間間隔で周期的にモーションスティック4に送信する(S1008)。
【0075】
モーションスティック4では、釣竿1からのアクションフィードバックのデータ送信を待ち、引きのデータを受信する(S1009)。引きの受信は、最初の引きデータであるかをアタリモードのオンオフで判断する(S1010)。アタリモードがオフであった場合は、アタリ再現モジュール58にアタリの再現を指令する。この場合、アタリの強度の程度に応じて、アタリ再現モジュール58の衝撃(引きの加速度)を計算してアタリを再現する(S1011)。なお、アタリは、アタリ再現モジュール58内のおもりをバネで引っ張り、加速度を与えることで生じる。また、本実施例では、アタリを体感的に強めるため、振動モジュール59により振動も加える(S1012)。この振動の強さは、アタリの強度に応じて計算する。最初の引きがアタリであったので、アタリモードをオンにして(S1013)、次の引きを待つ。S1010に戻る。アタリモードがオンであった場合は、既にアタリの引きが生じているので、以後は、餌に食い付いた魚の引きである。S1014で、引き強度がゼロかを判断する。ゼロならば、引きは中断しているので、次のデータ送信を待つ。なお、引きの状態にいるときは、引きが無くても、釣竿1から指定時間間隔で引きデータが送信される。引きがあった場合は、アタリ再現モジュール58は引きの衝撃を出力する(S1015)。引きのアタリ再現モジュール58のふるまいは、おもりによる加速度の衝撃を断続的に出力することで実現する。しかし、バネの引っ張りはすぐに無くなるので、再度、バネを引っ張り、おもりを上下動させる。また、引きを体感的に高めるため、引きの強度に応じた振動を発生させる(S1016)。この後、次の引きのデータ送信を待つ。
【0076】
本実施例は、実際の釣り場における釣竿1を無線LAN8で高速モバイルルーター2に通信し、高速モバイルルーター2でインターネットに中継し、インターネットからスマートフォン3に接続し、スマートフォン3はモーションスティック4とブルートゥース通信9で接続する方式を採用している。しかし、専用線又は屋内の無線LAN、更には有線等を使用し、その一部の回線を替えて、本発明と同等の双方向アクションフィードバックによるリアルゲームシステムを実施したとしても、その実施形態は、本発明に含まれることは言うまでもない。
【符号の説明】
【0077】
1 釣竿
2 高速モバイルルーター
3 スマートフォン
4 モーションスティック
5 Webカメラ
6 Live映像配信サービス
7 PC
8 無線LAN
8−1 無線LAN
9 ブルートゥース通信
30 釣竿制御ユニット
31 電動リール
32 無線LANアンテナ
33 垂直アクチュエーター
34 水平アクチュエーター
35 荷重センサー
36 釣り糸
40 マイクロプロセッサ(釣竿制御)
41 Webカメラインターフェイス
42 荷重センサーインターフェイス
43 電動リールインターフェイス
44 無線LANインターフェイス
45 垂直アクチュエーターインターフェイス
46 水平アクチュエーターインターフェイス
47 ROM(釣竿制御)
48 RAM(釣竿制御)
50 スティック筐体
51 握り柄
52 オン/オフスイッチ
53 リール緩めボタン
54 リール巻き取りボタン
55 モーションスティック制御ユニット
56 加速度センサーモジュール
57 ブルートゥースモジュール
58 アタリ再現モジュール
59 振動モジュール
60 マイクロプロセッサ(モーションスティック制御)
61 加速度センサーインターフェイス
62 アタリ再現モジュールインターフェイス
63 ブルートゥースインターフェイス
64 振動モジュールインターフェイス
65 ボタン制御インターフェイス
66 ROM(モーションスティック制御)
67 RAM(モーションスティック制御)
70 おもり
71 バネ1番
71−1 バネ1番(伸び)
71−2 バネ1番(縮み)
71−3 バネ1番(引き)
72 バネ2番
72−1 バネ2番(伸び)
72−2 バネ2番(縮み)
72−3 バネ2番(引き)
73 ワイヤー
73−1 ワイヤー(巻き)
73−2 ワイヤー(緩み)
73−3 ワイヤー(引き)
74 モーター
75 プーリー
76 モーター作動チョッパ
【技術分野】
【0001】
本発明は、実際の場で起きた事象を遠隔の場に再現かつ体感させ、同時に、遠隔の場における操作を実際の場に再現させるための、特に実際の場と遠隔の場の双方方向におけるアクションフィードバックの技術に関する。
【背景技術】
【0002】
マイクロプロセッサを利用するゲーム機器やゲームシステムは、ハード/ソフトの性能向上とコストダウンをベースに誕生し、コンピュータグラフィックス技術の発達に従い、高度化してきた。メカトロニクス技術は、遠隔操作機器の多様化を促し、シミュレーション技術も同様の恩恵を受け、人や物の動きを再現し、この分野における多くのノウハウを蓄積しつつある。これらの技術が集合し、仮想現実が出現すると、ゲームシステムは益々発展・拡大し、ゲームが提供する仮想の世界において、ユーザがアクションや動きを伴ってゲームに参加することが望まれ、実現した。また、インターネット、無線LAN、近接無線通信もゲーム、シミュレーションシステム、及び遠隔システムなどに取り込まれ、相乗効果を生んでいる。ゲームでは、モーションを検出する加速度センサーを始めとして各種のセンシング技術が多種多様のセンサーを生み出し、市場に提供している。更に、MEMSを生み出した半導体組立て技術の目覚しい技術革新により、チップ化したセンサーがゲームコントローラにも利用できるようになった。このような背景から、実際の場に対して遠隔の場から操作する提案や、仮想の場で現実のごとく体感する仮想現実応用のゲームの提案や、現物を遠隔操作し、臨場体験をするシミュレーション玩具の提案などがなされてきた。
【0003】
特許文献1は、釣り用リールの制御を赤外線を利用してコードレスで遠隔操作する発明である。操作の指示はリモコンのスイッチで行なうので、遠隔の場所でリールを模した装置を使用するわけではない。この類型には、隔離された機器に対して、当該機器を模した機器を操作者が使用し、動かすと隔離された機器の動きも同様の動きをする技術も開発されている。この技術はセンサー技術の向上と多種多様なセンサーの出現により、人の動きをそのまま真似をするロボットや、危険物を扱うマニピュレーターとして実用化されている。特許文献2は、釣りの感覚を再現するゲーム装置の発明である。釣りの対象は実際の魚ではなく、画面に表示される架空の魚であり、レバー操作により画面上の架空の釣竿を動かして釣りを行なう。また、リールを模した機器を備えてあり、ハンドルを手で回転させてリール操作を行なう。魚が掛るとリールにブレーキが掛り、かつワイヤーに加わる張力が魚の引きを現出する。このように魚との駆け引きも可能であり、現実の釣りの醍醐味を味わうことができる。特許文献3は、玩具を使用したシミュレーションゲームの発明である。操縦装置を遠隔操作して、玩具の戦車を運転するゲームである。テレビ画面には戦車に搭載したカメラにより実際の景色が映し出されるので、あたかも自分が戦車に搭乗しているような臨場感を得られる。対戦も可能であり、敵に対して、射撃などの働きかけを行い、敵からも応射があるなど、音、光のフィードバックがある点で通常のシミュレーションゲームとは異なる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−125545号公報
【特許文献2】実開平11−226261号公報
【特許文献3】実開2004−105631号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の方法は、遠隔操作に過ぎず、実際の魚が掛ってもアタリや引きの反応はない。魚の反応を操作者が実感するわけではないので駆け引きの余地はなく、臨場感に乏しい。特許文献2の方法は、働きかけに対して反応があり、反応を感覚として実感を得ることができるが、対象が架空であるため、操作者の動きが遠隔操作によって働きかけたものではない。特許文献3の方法は、実際の事物を遠隔操作によって動かし、その反応が返ってくる点で臨場感溢れるものであるが、返って来る反応は、音や映像に限定され、動きが返るものではない。
【0006】
ゲームが高度化され、ゲームの中に操作者のアクションを取り込むものが出現するようになった。ゲーム用のコントローラに加速度センサーを内蔵させて動かすと、そのコントローラの動きそのものがゲームのキャラクタや仮想の事物に伝わり、コントローラの動きに合わせた反応がゲームのキャラクタから返るものが市販されている。また、操作者の位置をゲームの中に取り込み、ゲーム内の相対的な位置に置き換え、ゲームの世界に操作者が参加する仕組みのものも現れた。しかし、操作者からの働きかけのインプットは実現しても、その反応であるアウトプットは音や光や映像に過ぎない。剣でキャラクタを斬れば、斬った手ごたえがあるわけではなく、テニスのボールを打ち返してもボールの当たる衝撃があるわけでもない。せいぜい振動による擬似的な体感を与えるに過ぎない。
【0007】
本発明は、上記の問題を解決するためになされたものである。例えば、凍てついた湖の氷上で行なうワカサギ釣りを暖かい室内でライブ映像を見ながら、釣竿を模したモーションスティックにより実際の釣り体験を得ることができればどうであろうか。モーションスティックで釣竿を操る動きはそのまま現地の釣竿の動きになり、魚が掛れば、そのアタリや引きがモーションスティックに伝えられ、魚の釣り上げを遠隔で体感するのである。リール操作も遠隔で行ない、実際の電動リールを稼働させる。本発明は、実際の場の実際の物と遠隔の場における実際の物に見立てた物との間で、双方のアクションがフィードバックされる技術と実際の釣り場で行う釣りの感触を遠隔仮想の釣り場に伝える技術により、実際の釣り場で行う釣りを遠隔仮想の釣り場においてライブで体験できるゲームシステムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、本発明は以下の特徴を有する。
【0009】
本発明である魚釣りリアルゲームシステムは、次の構成からなる。
1)釣り糸の張力を検出する張力データ検出手段と回転データを受けて回転する電動リール機構と張力データを送信し、回転データを受信する第1の通信手段とを備えた釣竿
2)この釣竿を装着し、動きデータを受けてこの釣竿を上下及び左右に動かすアクチュエーター機構と動きデータを受信する第2の通信手段とを備えた釣竿支持台
3)釣竿を使用する実際の釣り場を撮影し、ライブ映像を送信する第3の通信手段を備えた撮影機
4)このライブ映像を受信・表示する第4の通信手段を有する端末装置
5)自己の動きを検出する動きデータ検出手段と自己に加速度を生じさせる加速度発生手段と回転データを生成する仮想リール手段とを備え、かつ動きデータと回転データを送信し、張力データを受信する第5の通信手段を有する釣竿に見立てたモーションスティック
を具備し、釣竿とモーションスティックとの間の双方のアクションフィードバックは次の実行による。
1)モーションスティックは、受信した張力データに応じた加速度を加速度発生手段により発生させて、釣り糸の張力を再現
2)電動リール機構は、受信した回転データに応じて回転
3)アクチュエーター機構は、受信した動きデータに応じた釣竿を動かすことによってモーションスティックの動きを再現
以上を特徴とする。
【0010】
また、本発明における加速度発生手段は、張力データの示す張力と同等の力でバネに結び付けられたおもりをワイヤーで引き、このワイヤーの引きを解放することにより、おもりが、伸長したバネを縮ませることにより加速度を発生させることを特徴とする。
【0011】
ただし、張力データの発生は、実際の釣り場であり、魚の引きが発生してからデータを送信し、モーションスティックに到着、おもりを引いて離すのでは遅すぎるかもしれない。また、魚が引いた釣り糸により、竿がしなる弾みなど微妙な張力変化もあり、釣竿とは物理的に異なるモーションスティックに同じ力を与えても同じ効果は生じない。そこで、ゲームとして、釣の醍醐味やより強い体感を優先するため、予め、ワイヤーを引いておくことにより、実際の魚のアタリや引きよりも強い加速度を与える方がゲーム効果は高い。なお、この加速度発生手段は、後述する実施形態では、アタリ再現モジュールと呼ぶ部品が相当する。更に、張力データは本発明の実施形態では、アタリの強さ又は引きの強さと表現されている。また、張力データには、時間情報を含むことが好ましい。
【0012】
また、本発明における張力データ検出手段は、釣り糸の引きの力を荷重センサーに伝え、この荷重センサーにより検出された圧力を前記張力データに格納することを特徴とするものである。圧力の検出は、釣り糸が荷重センサーを引くか、又は釣り糸の引きをフック等により荷重センサーを圧する仕掛けにするかを選択できる。
【0013】
上記とは別に、本発明における張力データ検出手段は、少なくとも1軸の加速度センサーを備え、加速度センサーが検出する引きによって生じた加速度を張力に換算し、張力データに格納することを特徴とするものもある。
【0014】
この手段は、直接の引きによる圧力ではなく、引きによって生じた加速度である。この場合、引きの力は、3次元に分散されるので、一つの次元の力だけでは不足することが多い。ただし、実際の引きは3方からくるので、より正確なデータを取得する場合には都合がよい。どちらの手段を採用するかは、モーションスティックの再現能力やゲーム効果を評価するとよい。
【0015】
また、本発明における仮想リール手段は、巻き取り回転ボタンと緩め回転ボタンの押下強度を速さ度合の数値として取得し、巻き取り方向又は緩める方向の区分情報と共に回転データに格納することを特徴とする。
【0016】
また、本発明における電動リール機構は、この回転データに含まれる巻き取り方向又は緩める方向の区分情報と速さの数値情報に基づき、電動リールを回転させることを特徴とする。
【0017】
モーションスティック側のリールをボタン等で代用する場合には、実際のリールの回転の速さや重さ、魚の引きによるブレーキの体感は生じない。従って、速い回転を欲する場合には強く押す心理に従い、押下の強さを回転の速さにした。強さの数値はリールのスピードのMAX/MINの範囲を相対的な値で割り振ると好ましい。なお、実際と似た回転式のリールをモーションスティックに装着する場合には、リールの回転の重さや引きによる回転のブレーキなどを再現することが好ましい。なお、回転データを本発明の実施形態では、リールボタン区分と強度と表現している。これは、モーションスティックの仮想のリールはリール回転を巻き取りボタンと緩めボタンで指示するからである。リール回転の速さはボタン押下の強さで指示するので、強度が情報になる。また、回転データには、押下の時間情報を含むことが好ましい。
【0018】
また、本発明における動きデータ検出手段は、少なくとも2軸の加速度センサーを備え、加速度センサーが検出するモーションスティックの動きにより生じた加速度の垂直成分と水平成分を動きデータに格納することを特徴とするものである。
【0019】
モーションスティックに加速度センサーを装着して、動きを検出するためには、最低3軸の加速度センサーが必要である。しかし、動きを再現する釣竿をアクチュエーターに装着した場合には釣竿は縦方向に振るか横方向に振るかの2軸しかない。この理由から、少なくとも2軸の加速度センサーでよいとした。釣竿をマニピュレーターに持たせる実施形態になると、3軸加速度センサーが必要になる。更に、くねくねした動きや微妙な振りや返しの動きを捉えることを意図すると、更に角速度センサー(ジャイロセンサー)による6軸が必要になる。また、ロボットを採用し、遠隔仮想釣り場の操作者の動きを再現しようとすると、位置情報が必要になる。そのため、磁気センサーや方位センサーを応用して、双方の絶対位置又はどちらかに合わせた相対位置を把握しなければならない。
【0020】
また、本発明におけるアクチュエーター機構は、この動きデータに含まれる加速度の垂直成分と水平成分を抽出し、指定された基準時間に基づき得られた移動距離に換算して、釣竿を上下方向と水平方向に移動させる制御を実行することを特徴とする。
【0021】
移動距離を直接計算したものは、モーションスティックの側の数値である。これをそのまま釣竿を装着したアクチュエーターに適用することは不自然である。両者は物理的に異なるからである。この距離はアクチュエーターに合わせた相対値となる。
【0022】
なお、これらを計算するときは事象データの発生に関する時間情報や時系列情報が必要になる。従って、相手に送信するデータには時間情報が含まれていなければならない。あるいは、一定の基準時間を双方で取り決めて、事象データは常に基準時間の数値であるとすれば、この限りではない。タイマーは一般にはマイクロプロセッサに内蔵されており、時間データを記録するのもマイクロプロセッサになる。
【0023】
時間情報は、例えば、加速度から移動距離を計算する場合に必要である。また、微妙な動きも単位時間当たりの加速度データを利用して、積分すれば動きを表現できる。モーションスティックの移動距離については、加速度センサーが捉える加速度の時間的変化により、スティックの移動位置が計算できるので、加速度と時間を動きデータに記録し、釣竿に送信する。再現するときは、再現する側が受けた相手のデータに基づき、自己の再現機器に相対的に再現することになる。この場合には、アクチュエーター側で加速度と時間の情報を自己の移動距離に換算する。換算する理由は、双方の機器の違い、環境の違いにより、全く同じスケールを当てはめるわけにはいかないからである。従って、再現側がデータに基づき、自己機器に合わせて再現することが好ましい。なお、動きデータを本発明の実施形態では、回転データと一括して送信するやり方を実施例に採用しているので、回転データと動きデータをまとめて、動き情報と呼んでいる。また、動きデータには、時間情報を含むことが好ましい。
【0024】
また、本発明における撮影機は、Webカメラ又はネットワークカメラを含むことを特徴とする。
【0025】
映像は動画であり、ライブ映像である。例えば、ONVIF(Open Network Video Interface Forum)というフォーラムではネットワーク製品のインターフェイスの規格を提供しており、この規格に基づき、サービス機関がライブ映像の中継サービスを行う。そのサービス機関の提供する規格に基づき、利用するカメラの種類や仕様が定まる。また、メディア、画像、更にはセキュリティも合わせる必要がある。映像はこのサービス機関に記録され、遠隔の仮想釣り場へ送信される。
【0026】
また、本発明における端末装置は、携帯情報端末、タブレット端末、ノートPC、PC、又はインターネットテレビを含むことを特徴とする。
【0027】
具体的には、スマートフォンを想定しているが、どこでもゲームが楽しめるようにモバイル端末であれば済む。
【0028】
また、本発明における第1から第4の通信手段が接続する回線は、有線若しくは無線によるインターネット、LANルータを介してインターネットと接続する有線若しくは無線LAN、又は高速モバイルルーターを介してインターネットと接続する無線LANを含むことを特徴とする。
【0029】
また、本発明における第5の通信手段が接続する回線は、端末を介してインターネットと結ぶ近接無線回線若しくは赤外線通信、無線によるインターネット、LANルータを介してインターネットと接続する無線LAN、又は高速モバイルルーターを介してインターネットと接続する無線LANを含むことを特徴とする。
【0030】
第5の回線は、モーションスティックと端末間における接続回線を指す。モーションスティックの使用状況から無線が好ましい。映像を見ながら釣を行うので、近接無線回線を使用する。この候補は、ブルートゥース(登録商標)、赤外線通信、あるいは、ZigBee(登録商標)であり、Wi−Fi(Wi Fi:登録商標)等も対象になる。
【発明の効果】
【0031】
本発明によれば、遠隔仮想の釣り場のモーションスティックの動きを実際の釣り場の釣竿に再現するように、遠隔の場の動きや力を実際の場に伝え、同様の動きや力として再現させる効果を奏する。
【0032】
また、実際の釣り場の魚のアタリや引きを遠隔仮想釣り場のモーションスティックに再現するように、実際の場の動きや力を遠隔の場に伝え、同様の動きや力として再現させる効果を奏する。
【0033】
この双方向のアクションフィードバックにより、魚釣りのゲームでは、実際の釣り場の様子をライブで見ながら、遠隔の場から釣竿を模したモーションスティックで釣竿を動かし、かつ、魚のアタリや引きを擬似的に体感できるので、次のアクションにつながり、結果的に高い臨場感を味わうことができる効果を奏する。
【0034】
また、本発明である「実際の感触をインターネット経由で遠隔地に伝えるシステム」は、ゲームシステムに限らず、インターネットで閲覧する商品の感触(肌触り)を消費者が実感できるシステムなど、他分野での利用範囲が広く考えられる。
【図面の簡単な説明】
【0035】
【図1】本発明の実施形態であるリアルゲームシステムの構成図である。
【図2】本発明の実施形態における実際の釣り場で使用する釣竿と遠隔仮想釣り場で使用するモーションスティック及びスマートフォンとの機器間情報交換の概念図である。
【図3】本発明の実施形態における実際の釣り場で使用する釣竿の斜視図である。
【図4】本発明の実施形態における実際の釣り場で使用する釣竿の釣竿制御ユニットの機能ブロック図である。
【図5】本発明の実施形態における遠隔仮想釣り場で使用するモーションスティックの外観及び内部機器構成図である。
【図6】本発明の実施形態における遠隔仮想釣り場で使用するモーションスティックのモーションスティック制御ユニットの機能ブロック図である。
【図7−1】本発明の実施形態における実際の釣り場で使用するモーションスティックに内蔵するアタリ再現モジュールの機能説明図の前半部分である。
【図7−2】同様に本発明の実施形態における実際の釣り場で使用するモーションスティックに内蔵するアタリ再現モジュールの機能説明図の後半部分である。
【図8】本発明の実施形態であるリアルゲームシステムにおいて実際の釣り場の動画を遠隔仮想釣り場のスマートフォンに送信する処理フローである。
【図9】本発明の実施形態であるリアルゲームシステムにおいて遠隔仮想釣り場のモーションスティックの操作を実際の釣り場の釣竿にフィードバックする処理フローである。
【図10】本発明の実施形態であるリアルゲームシステムにおいて実際の釣り場の釣竿の動きを遠隔仮想釣り場のモーションスティックにフィードバックする処理フローである。
【発明を実施するための形態】
【0036】
図1を参照し、本発明である魚釣りリアルゲームの実施形態を説明する。実際の釣り場は、湖での釣り、川釣り、海釣りなどの自然の場や釣堀のような人造の場を問わず、高速モバイルルーターを経由してインターネットが利用できる場所であればどこでもよい。一方、遠隔仮想釣り場は、スマートフォンやタブレットのような高速モバイル通信対応の携帯情報端末であれば、屋内、屋外を問わず、利用可能である。ただし、追加課金請求されない無線LANでの接続利用が好ましい。PCやインターネットTVも簡単に持ち運びはできないが、一定条件の下、利用できる。勿論、大きな画面を使用できるので、より高い臨場感を得られる。実際の釣り場には釣竿1に餌を付けたり、餌の付いた釣り糸を水面にたらす準備作業、及び釣った魚を魚籠に入れる後作業は人間が行なうが実際の釣りは無人であり、釣りの操作は遠隔仮想釣り場からの遠隔操作により実施される。前述準備作業と後作業も自動化は可能であるが、本発明は触れない。
【0037】
実際の釣り場の状況は、Webカメラ5又はネットワークカメラから撮影し、高速モバイルルーター2を介してインターネット経由で、遠隔仮想釣り場のスマートフォン3又はPC7に動画送信する。Webカメラ5等は、無線LAN8で高速モバイルルーター2と通信する。映像は通信速度により、モノクロ又はカラーを使用するが、切り替えができることが好ましい。動画送信と釣竿1の動き、遠隔仮想釣り場のモーションスティック4の操作情報も瞬時に送受信する必要から、高速モバイルルーターは高速の仕様が好ましい。高速モバイルルーターと釣竿1やWebカメラ5との通信はWi−Fiによる無線LAN8が好ましい。この場合、釣竿1やWebカメラ5はWi−Fi対応機種である必要があるが、屋内、屋外に関わらず、広い領域でインターネット接続が可能になる。実際の釣り場の状況を撮影する場所は、釣竿1、釣竿1装着の電動リール31の上方、又は付近の釣り状況を俯瞰できる高所でもよい。なお、釣竿1からWebカメラ5等は制御されるので、両者が離れた場所に位置する場合は、両者をブルートゥース、赤外線、又は無線LANによる近接無線通信で接続する必要がある。一方、釣竿1とWebカメラ5の両者が独立して無線LANによる近接無線通信で高速モバイルルーター2を介してインターネットにアクセスする形態もある。また、Webカメラ5を釣竿1の支持台に装着し、空間を上下・左右・前後(又はズーム)に可動できる機構にして、遠隔仮想釣り場から絶好のアングルを選択可能にしてもよい。更に、図示していないが、複数のWebカメラ5等を配置し、様々なアングル、画面サイズの映像を遠隔仮想釣り場から随時選択できる仕組みも可能である。
【0038】
映像は、Live映像配信サービス6との認証情報の交換、デバイス、イメージ、メディアなどの制御情報の設定や定義、情報取得方法等の情報交換を通じて、送信ができる。また、同様に、スマートフォン3やPC7も同様の認証や制御情報の交換を実施して、映像の受信ができる。ONVIF(Open Netoork Video Interface Forum)などのネットワークカメラのインターフェイス規格に基づき、Webサービスとして利用する手段があり、本実施形態に取り込むと有用である。
【0039】
なお、実際の釣り場は、複数の場所を想定していることを前述した。図示していないが、本実施形態の実行に先立ち、遠隔仮想釣り場において、利用者が、釣り場を画面選択することも可能である。鮎と鯛では、釣り場の状態、更に、アタリや引きに違いがある。釣竿1の検出信号の相違を、モーションスティック4にフィードバックし、モーションスティック4の反応や操作も相応のフィードバックを起こさねばならない。この相違点を基準値として初期設定する必要がある。これらも本実施形態に網羅されるべき機能である。本実施例では一つの釣り場における釣りを例示しているが、本発明が具体化すると、鯛釣りが終わった後、同じ場所で、鮎釣りを楽しむことができる。それも本物の鮎と鯛であり、釣った魚を送ってもらうサービスがあればユーザに喜ばれるだろう。
【0040】
遠隔仮想釣り場の利用者は、実際の釣り場の状況をスマートフォン3又はPC7の映像で確認しながら、釣りを楽しむ。遠隔仮想釣り場のモーションスティック4は実際の釣り場の釣竿1に模せられている。モーションスティック4の3次元の動きは、釣竿1にフィードバックされる。これは、モーションスティック4に内蔵した加速度センサー等の動きを捉えるセンサーの働きによる。加速度センサーを使用する場合は、前後・左右・上下の3方向の加速度を検出する3軸加速度センサーが好ましい。3次元の動きを検出するセンサーであるが、演算処理を加えることにより、モーションスティック4の傾きも計算できる。くねくねした微妙な動きは角速度センサーとのセンサーフュージョンによる処理が必要であり、より正確な動きをフィードバックすることができる。ただし、現場の状況と遠隔地の状況は異なり、また、実際の釣竿1とモーションスティック4の形態の違いから、正確なアクションのフィードバックは意味を為さないとも考えられる。
【0041】
釣竿1は、支持台に固定されるが、本実施形態では、釣竿の空間移動をアクチュエーターで実現する。支持台自体が可動したり、支持台が固定であってもアクチュエーターが3軸の可動機構になっていれば、3軸での移動を制御しなければならない。釣りの形態から、支持台が固定された方が有利である。また、アクチュエーターは垂直の変位と水平の変位ができれば十分である。ただし、実際には、釣竿先端を見れば3次元の変位を起こしている。一方、傾きを含めたモーションスティック4のすべての動きをフィードバックするためには、可動式支持台が必要になる。また、モーションスティック4全体の相対位置と動きを完全にフィードバックするためには、釣竿1は支持台ではなく、ロボット機構によるマニピュレーター機構が備わっていなければならない。本発明は、魚釣りのリアルゲームを対象とするので、モーションスティック4の変位と動きを釣竿1の先端に反映すれば足りる。従って、本実施形態では固定支持台を採用している。
【0042】
図1では、モーションスティック4の動作による3軸のベクトル成分をスマートフォン3に転送し、スマートフォン3からインターネットを経由して高速モバイルルーター2にデータが到着する。高速モバイルルーター2はこのデータを無線LAN8に乗せ、釣竿1の制御系に送信する。データの種類は異なるが映像データも同じ無線LAN8を介してデータ授受を行い、無線LAN8からインターネットに接続される。ただし、一方、釣竿1とWebカメラ5の両者が独立してそれぞれ無線LAN8、無線LAN8−1による近接無線通信で高速モバイルルーター2を介してインターネットにアクセスする形態もあり、より好ましい。また、モーションスティック4とスマートフォン3の間は、ブルートゥース通信9又は赤外線通信等の短距離の無線回線を使用する。なお、モーションスティック4が無線LANインターフェイスを有する場合には、遠隔仮想釣り場に高速モバイルルーターを持ち込み、スマートフォン3とデータ授受を行い、かつスマートフォン3を経由せずに、インターネット/高速モバイルルーター網に接続することもできる。なお、図1には記載していないが、スマートフォン3の代わりにPC7との近距離無線通信も当然に可能であり、モーションスティック4と情報授受を行い、リアルゲームを進行させることができる。
【0043】
なお、モーションスティック4には、仮想のリール機能があり、ボタンで、巻き取りやリールの巻き戻し(緩み)を行なう。このリールの操作もモーションスティック4の動きデータと共に釣竿1へ送られ、釣竿1の電動リール31の操作に再現される。
【0044】
また、本発明は、モーションスティック4無しに、スマートフォン3やPC7の画面の中で、仮想の釣竿を動かし、かつ、リール操作を行い、釣りのリアルゲームを進めることもできる。
【0045】
釣竿1には、魚が餌を銜えたときの‘アタリ’を感知するセンサーを備えてある。このアタリの強さにより、真のアタリかを釣竿1は判断し、真のアタリの場合には、自律的に釣竿を引き上げ、かつ、自律的にリールを巻く。この自律的な動作や操作の設定は、遠隔の地にいる操作者に伝え、操作者がアタリに反応するまでの時間が魚の反応に追いつかないための支援機能が必要になるからである。アタリを検出すると、その情報は、高速モバイルルーター2、インターネット及びスマートフォン3を経由してモーションスティック4に到着する。
【0046】
釣竿1のアタリセンサーは、荷重センサーが好ましい。荷重センサーはアタリの強さや魚の引きの強さを正確に検出できるからである。荷重センサーの代わりに加速度センサーを使用してもよいが、アタリや引きの強さを計算する必要がある。なお、アタリや引きを3次元のベクトル成分でデータ表現する場合には、加速度センサーが好適である。なお、アタリや引きは、魚により相違があるので、釣竿1のアタリ判断やアタリの後の自律的な釣竿の合わせ(釣竿を上方へ上げるなど)や電動リールの巻き取り操作を魚や釣り場の環境に合わせる必要がある。従って、実施形態を汎用的に構成するためには、システム開始の初期に釣り場環境と対象の魚(複数)の基準となるデータを設定する機能が必要である。
【0047】
釣竿1からのアタリの情報が、モーションスティック4に届くとモーションスティック4にアタリの擬似的な衝撃を与えるため、モーションスティック4に内蔵したアタリ再現モジュールを稼動させる。このアタリ再現モジュールはモーションスティック4が操作者と反対の方向に強い加速度を与えるものである必要がある。例えば、おもりが前方に飛び出すメカの仕掛けや、前方から磁力で引っ張るような電磁気の仕掛けを想定することができる。また、釣り糸に模した糸を外部に結び、モーションスティック4から電動で引っ張る方法でもよい。
【0048】
アタリの後に、魚は釣り糸を引っ張り逃れようとする。アタリと同じく、引きも強さに応じた擬似的な力をモーションスティック4に再現する必要がある。引きはアタリと同じ性質の力なので、釣竿1の荷重センサー又は加速度センサーが検出し、モーションスティック4に伝え、強さに応じた引きの状態をアタリ再現モジュールで再現することができる。ただし、アタリは1回であるが、引きは間歇的、継続的なため、断続的な加速度を生じさせる機構が必要になる。アタリがくると、直後に引きのデータが釣竿1から来ると同時に、モーションスティック4からも、スティックの動きとリール操作のデータを頻繁に釣竿1に送るため、データ送受信が激しく行われる。なお、魚がかかっているときは引きがあるので、引きに応じた振動をモーションスティック4に与え、釣りの体感性を擬似的に高めてもよい。
【実施例1】
【0049】
図1において本発明の取り得る実施形態を説明した。図2〜図10は、本発明を実施する一事例を構成したものである。本実施例では、実際の釣り場はワカサギ釣りであり、固定の支持台に取り付けられた釣竿1を使用して、湖の氷原の一画に空けた穴からワカサギを釣るものである。
【0050】
まず、図2を参照して、本発明の実施形態における実際の釣り場で使用する釣竿1と遠隔仮想釣り場で使用するモーションスティック4及びスマートフォン3との機器間情報交換の概念を説明する。実際の釣り場の映像は、釣竿1に装着したWebカメラ5による。Webカメラ5が撮影した動画は、高速モバイルルーター2を介してインターネット経由でLive映像配信サービス6に送られ(S201)、Live映像配信サービス6のDBに蓄積される(S202)。遠隔仮想釣り場の操作者は、スマートフォン3から、Live映像配信サービス6に対して、実際の釣り場の映像送信を要求する。操作者はスマートフォン3に映し出された映像により、釣り場の状況を把握することができる(S203)。
【0051】
モーションスティック4は仮想の釣竿である。本実施例では、モーションスティック4に内蔵した加速度センサー56が3軸の動きのベクトル成分を検出し、モーションスティック4の上下、左右の動きを数値データとして釣竿1に送信する(S204)。S205において、釣竿1は受信したモーションスティック4の動きデータから上下方向のベクトル成分を抽出し、上下の変位に換算して、釣竿1の支持台の垂直アクチュエーター33に変位分の可動をさせる。同じく、動きデータから左右方向のベクトル成分を抽出し、左右の変位に換算して、釣竿1の支持台の水平アクチュエーター33に変位分の可動をさせる。これにより、釣竿1、特に釣竿先端は、モーションスティック4の動きの上下、左右方向を再現する。
【0052】
魚が餌を銜えたアタリが起きると荷重センサー35は引きの強さを検出する(S206)。釣竿1のマイクロプロセッサ(釣竿制御)40はアタリと判定するとモーションスティック4へ送信する。S207において、モーションスティック4はアタリの引きと判定し、アタリ再現モジュール58を起動し、アタリをフィードバック再現する。釣竿1では、垂直アクチュエーター33を指定の変位分上方へ自律的に可動させる(S208)。また、釣竿1では、魚の引きに合わせて自律的に電動リールを指定された強さで指定分の長さを巻き取る(S209)。引きはモーションスティック4にも次々と送信され(S206)、アタリ再現モジュール58が引きの強さに応じて、フィードバック再現する(S210)。
【0053】
モーションスティック4の仮想リールの操作は、リール緩めボタン53とリール巻き取りボタン54で行なう。リールの巻き取り又は緩め(巻き戻し)のデータを強さと一緒に釣竿1へ送信する(S211)。釣竿1では、リールの巻き取り又は緩め(巻き戻し)の区別と強さに応じた長さ分の可動を電動リール31に行なう(S212)。リールボタンは、離せば、強さはゼロになる(S213)。この情報が釣竿1に送信されると、電動リール31は停止する(S214)。なお、引きのデータが送られているときは、振動モジュール59による振動を銜えて、いっそうの臨場感を現出させてもよい。
【0054】
図3は、実際の釣り場で使用する釣竿1の斜視図である。本実施例では釣竿1を支持台上に固定する。しかし、垂直アクチュエーター33は釣竿1の釣竿制御ユニット30の制御により上下に可動し、水平アクチュエーター34も釣竿制御ユニット30の制御により左右に可動するのでモーションスティック4の動きをフィードバックすることができる。なお、釣竿に限っていえば、前後の動きは少ないが3次元方向に動くことになる。
釣竿には荷重センサー35が装着されており、魚のアタリ及び引きを釣り糸36を介して検出し、その強さを釣竿制御ユニット30に伝える。Webカメラ5は本実施例では釣竿1の上部に装着する形態をとる。Webカメラ5が釣竿制御ユニット30に制御されて同じ無線LAN8を利用する場合には無線LANアンテナ32はWebカメラ5が撮影した映像を釣竿制御ユニット30を介して高速モバイルルーター2に送信し、かつ、釣竿1の事象情報やモーションスティック4の操作情報を無線LAN8、高速モバイルルーター2、インターネットを介して授受する機能を有する。一方、釣竿1とWebカメラ5の両者が独立して無線LANによる近接無線通信で高速モバイルルーター2を介してインターネットにアクセスする形態もある。この場合には、釣竿1は無線LAN8、Webカメラ5は無線LAN8−1と近接無線通信も独立する。電動リール31は、現実のリールであり、釣竿制御ユニット30により、巻き取りと緩め(巻き戻し)を実行する。また、モーションスティック4の仮想リールからの操作情報がこの機器にフィードバックする。釣竿制御ユニット30は、釣竿1が無人で作動するために適切な制御をし、その情報をモーションスティック4に送信すると共に、モーションスティック4の操作を釣竿1にフィードバックして再現する制御を行なう。なお、荷重センサーは釣り糸に接続されるので、釣竿のどこに配置してもかまわないが、荷重センサーの代わりに加速度センサーを使用する場合は、加速度から引きの強さを検出するため、釣竿の先端に近いほど好都合である。ただし、釣竿のしなりがノイズとして影響するので、釣竿と電動リールの間を移動可能にして、最適な動きを検出する箇所を探すとよい。
【0055】
図4は、釣竿1の釣竿制御ユニット30の機能ブロック図である。釣竿1の各機器の制御は、マイクロプロセッサ(釣竿制御)40が実行する。マイクロプロセッサ(釣竿制御)40は、ROM(釣竿制御)47に格納したプログラムをRAM(釣竿制御)48にロードしRAM(釣竿制御)48に設けたワークエリア、定義値等を使用してプログラムを実行する。釣竿制御ユニット30は、各機器のインターフェイスを介して、各機器を制御する。Webカメラインターフェイス41はWebカメラ5との制御データの授受を行なう。荷重センサーインターフェイス42は、荷重センサー35の検出データをマイクロプロセッサ(釣竿制御)40に伝える。電動リールインターフェイス43は、電動リール31の巻き取り及び緩めについて、その強さ、スピードを含めてマイクロプロセッサ(釣竿制御)40の命令を電動リール31に伝える。垂直アクチュエーターインターフェイス45は、マイクロプロセッサ(釣竿制御)40が指令した垂直アクチュエーター33へ可動の長さを伝える。マイクロプロセッサ(釣竿制御)40は、モーションスティック4から送信された上下方向のベクトル成分を可動長に換算する。水平アクチュエーターインターフェイス46は、マイクロプロセッサ(釣竿制御)40が指令した水平アクチュエーター34へ可動の長さを伝える。マイクロプロセッサ(釣竿制御)40は、モーションスティック4から送信され左右方向のベクトル成分を可動長に換算する。無線LANインターフェイス44は、無線LANアンテナ32で授受する無線LAN8の通信データや制御データをコントロールし、マイクロプロセッサ(釣竿制御)40に伝える。マイクロプロセッサ(釣竿制御)40は、モーションスティック4とのアクションのフィードバックに関する情報を無線LANインターフェイス44で受け継ぎ、各機器のインターフェイスに処理結果と制御命令を伝える。また、各機器からのデータを制御し受け継ぎ、無線LANインターフェイス44を介して、送信する。
【0056】
なお、タイマーを図示していないが、タイマーはマイクロプロセッサ(釣竿制御)40はタイマーを内蔵しているものとする。タイマーは、例えば、釣竿内の事象から発生したアタリや引きの時間的変化の記録に使用する。この情報を張力情報とともに記録し、モーションスティックに送れば、アタリや引きの再現に役立つからである。
【0057】
図5は、遠隔仮想釣り場で使用するモーションスティック4の外観及び内部機器構成図である。a)はモーションスティック4の外観図である。スティック筐体50は、モーションスティック4の機構を保護する構造を有する。握り柄51は片手でモーションスティック4を持つ柄である。ここにはリール緩めボタン53とリール巻き取りボタン54が装着してあり、仮想のリールを緩めたり(巻き戻し)、巻き取ったりする指示をする。オン/オフスイッチ52はモーションスティック4の電源のオンオフを行なう。b)はモーションスティック4の内部の構造の概観である。先端部に加速度センサーモジュール56とブルートゥースモジュール57がある。加速度センサーモジュール56はモーションスティック4の動きを捉える働きがある。ブルートゥースモジュール57は、スマートフォン3との近距離無線通信を実行する。アタリ再現モジュール58は、モーションスティック4を前方に押し出す機能を有し、アタリや引きを再現する。振動モジュール59は、振動を発生させるものであり、本実施例では、引きがあるアタリやその後の断続的な引きが生じているときに引きと同時に振動を加えて引きを擬似的に再現することに利用する。モーションスティック制御ユニット55は、モーションスティック4を制御し、各機器の起動や停止を行なう。
【0058】
図6は、モーションスティック4のモーションスティック制御ユニット55の機能ブロック図である。モーションスティック4の各機器の制御は、マイクロプロセッサ(モーションスティック制御)60が実行する。マイクロプロセッサ(モーションスティック制御)60は、ROM(モーションスティック制御)66に格納したプログラムをRAM(モーションスティック制御)67にロードしRAM(モーションスティック制御)67に設けたワークエリア、定義値等を使用してプログラムを実行する。マイクロプロセッサ(モーションスティック制御)60は、各機器のインターフェイスを介して、各機器を制御する。加速度センサーインターフェイス61は、加速度センサーモジュール56が感知したモーションスティック4の動きを3軸の加速度で捉えて、その上下・左右・前後のベクトル成分を数値としてマイクロプロセッサ(モーションスティック制御)60に伝える。なお、加速度センサーモジュール56は3次元のベクトル成分を検出するが、本実施例の釣竿1は支持台固定なので、上下と左右のベクトル成分を使用する。アタリ再現モジュールインターフェイス62は、マイクロプロセッサ(モーションスティック制御)60が制御する命令をアタリ再現モジュール58へ伝える。アタリ再現モジュール58は、アタリにおける引きやその後の断続的な引きを、おもりの移動で再現するものである。振動モジュールインターフェイス64は、マイクロプロセッサ(モーションスティック制御)60の命令を振動モジュール59に伝える。本実施例では、釣竿1からのアクションフィードバックにおいて、引きがあったときに、操作者に引きを効果的に体感させるために振動を加えている。なお、振動の程度も引きの強弱に応じる。ボタン制御インターフェイス65は、リール緩めボタン53とリール巻き取りボタン54のボタンの押下及びその強さをマイクロプロセッサ(モーションスティック制御)60に伝える。マイクロプロセッサ(モーションスティック制御)60は、スマートフォン3との情報交換をブルートゥース通信9で行なう。ブルートゥースインターフェイス63は、ブルートゥース通信9の制御及びデータの授受の役割を有する。
【0059】
なお、タイマーを図示していないが、タイマーはマイクロプロセッサ(モーションスティック制御)60にタイマーを内蔵しているものとする。タイマーは、例えば、モーションスティックの動きならば、加速度センサーが捉える加速度の時間的変化により、スティックの移動位置が計算できる。加速度と時間はデータとして記録し、釣竿に送信する。再現するときは、再現する側が受けた相手のデータに基づき、自己の再現機器に相対的に再現することになる。即ち、双方の機器の違い、環境の違いにより、全く同じスケールを当てはめるわけにはいかないからである。従って、再現側がデータに基づき、自己機器に合わせて再現することが好ましい。
【0060】
図7−1及び図7−2は、モーションスティック4に内蔵するアタリ再現モジュール58の機能説明図である。
【0061】
a)は、フラットな状態のときのアタリ再現モジュール58である。おもり70はバネ1番71とバネ2番72に結ばれている。このバネ2本と逆方向にワイヤー73がおもりを結び、平衡している。更にワイヤー73はプーリー75に巻き取られるように、プーリー75に結ばれている。ワイヤー73のプーリー75への巻き取り又は巻き戻しはモーター74が行なう。通常、アタリ再現モジュール58はアタリと引きに備えて、バネを伸ばし、おもり70をバネと反対方向に引き寄せておく。アタリや引きがあれば、おもり70の引き寄せを解放することにより、バネがおもり70を引き寄せ、このとき、バネ方向に加速度が生じ、モーションスティック4自体がバネ方向に引っ張られる。なお、実際の釣りでは、釣竿1の向きに対して、斜め下方から引きがある。斜め下方の引きを再現するならば、極力、実際の場の張力を同じ方向から発生させるべきである。しかし、本実施例では、この引きを荷重センサー55で検出するので、方向性は取得しない。即ち、引きで得た張力は、モーションスティック4の方向と180度逆の方向に反映される。また、アタリ再現モジュール58は、モーションスティック4の先端方向に向かって、引きを再現する。即ち、モーションスティック4の動きを検出する加速度センサーの前後の軸方向にこのアタリ再現モジュール58の加速度が加わることになる。しかし、本実施例では、前後軸の加速度はアクチュエーターに反映させていない。従って、理論上、アタリ再現モジュール58の衝撃は釣竿1に影響がないことになる。
【0062】
b)は、バネ1番71とバネ2番72が引き伸ばされた状態であるバネ1番(伸び)71−1とバネ2番(伸び)72−1が表示されている。また、ワイヤー73がプーリー75に巻き取られた状態であるワイヤー(巻き)73−1が表されている。なお、本実施例では、リール緩めボタン53が押されると、ワイヤー73が巻き取られ、バネが引き伸ばされる状態にする。この実行は、マイクロプロセッサ(モーションスティック制御)60が制御している。このようにすると、リールの緩めの後に、アタリや引きが発生し、次いでリールの巻取りがあるので、瞬時にアタリを再現でき、好都合だからである。
【0063】
c)は、アタリが発生したときのアタリ再現モジュール58の起動状態を表している。ワイヤー73が解放された状態であるワイヤー(緩み)73−2と、バネ1番71とバネ2番72がおもり70を引きつけ、縮んだ状態のバネ1番(縮み)71−2とバネ2番(縮み)72−2を表している。このとき、おもり70は強くバネに引っ張られ、バネの縮む方向に加速度が発生している。ワイヤー73方向にモーションスティック4を握っている操作者は引っ張られる感覚を覚える。引きの強さは、マイクロプロセッサ(モーションスティック制御)60がアタリ再現モジュールインターフェイス62に与え、モーター74が強さに応じてブレーキを掛ける仕組みである。なお、張力の再現は、マイクロプロセッサ(モーションスティック制御)60又はアタリ再現モジュールインターフェイス62がバネ1番71とバネ2番72の縮みの力とおもりの重さと縮みの方向を計算して、縮むときの長さ分を解放する。縮むときの長さはワイヤー73の解放の長さである。ただし、そのままを再現しても、実際の引きの実感は得られない恐れがある。これは、釣竿1とモーションスティック4の物理的相違から生ずると推測できる。従って、本実施例では振動モジュール59により、操作者の体感を疑似的、暗示的に補助している。更に引きの衝撃も強さを加えるとかの工夫も必要かもしれない。
【0064】
d)は、アタリの後の引きの場合のアタリ再現モジュール58のふるまいを表示したものである。引きは持続的又は断続的に起きるので、バネの引き伸ばしだけでは、すべての加速度を賄えない。そこで、ワイヤー73とバネとの間で引き伸ばしと縮みを繰り返して擬似的な引きを作り出す。例えば、ワイヤー73が巻き取られるときは等速度で、バネが縮むときは、数回に分けて、急速に縮ませると引きがかなり再現できる。このとき、モーター74の回転をモーター作動チョッパ76が断続的に行なう。この制御は、マイクロプロセッサ(モーションスティック制御)60が実行するモーター作動チョッパ76制御プログラムによる。
【0065】
図8は、本発明の実施形態であるリアルゲームシステムにおいて実際の釣り場の動画を遠隔仮想釣り場のスマートフォンに送信する処理フローである。図8を参照して、実際の釣り場における釣りの状況を撮影して、映像を送る本実施例の方法を説明する。
【0066】
本実施例では、釣りの開始の所期設定として、スマートフォン3により、釣り場や釣竿を選択する(S801)。この選択により、予め準備された釣り場の環境や釣り対象の魚による基準値が設定される。基準値とは、アタリの判定基準である引きの強さや波などの紛らわしいノイズによる引きの除去などが相当する。また、釣竿1の性能等からくるアクションをフィードバックする換算値も含まれる。更に重要な設定値として、モーションスティック4の動きやリールボタンのデータ送信の周期時間単位や、引きのデータ送信の周期時間単位である。これらは、通常、ネットワーク速度や機器の性質により決定されているシステム提供値を採用するが、学習的に最適値に近づけるなどの手段を含めてもよい。選択された釣り場と釣竿1へ基準値等を送信する。送信情報は、スマートフォン3からインターネットを介して、高速モバイルルーター2に到達し(S802)、ここから無線LAN8を介して目的の釣竿1に送られる。釣竿制御ユニット30は送信情報を解析し、必要な情報をセットし、釣竿1を起動させる(S803)。
【0067】
釣竿制御ユニット30は、Webカメラ5を起動させる(S804)。これは、釣竿制御ユニット30がWebカメラ5を制御し、無線LAN8共有して使用する形態である。釣竿1とWebカメラ5が独立して無線LANを利用する場合には、図8の制御は不要になり、それぞれの通信フローに基づき、交信する。Webカメラ5(釣竿制御ユニット30とWebカメラインターフェイス41が実行)は、Live映像配信サービス6と認証、デバイス定義、メディア定義、映像仕様などの制御情報を交換し、撮影した映像の記録を要求する(S806)。高速モバイルルーター2は、Webカメラ5とLive映像配信サービス6を中継(S805)する。Webカメラ5の撮影が可能になると、高速モバイルルーター2を経由して(S807)、釣りの開始をスマートフォン3に伝える(S809)。Webカメラ5も撮影を開始する(S808)。スマートフォン3からLive映像配信サービス6に実際の釣り場からの映像の送信を要求する(S810)。S811でLive映像配信サービス6から認証されると釣りのリアルゲームシステムが始まる。一方、スマートフォン3とモーションスティック4との間でブルートゥース通信9を行なうためのプロファイル交換を行なう(S812)。次いで、モーションスティック4が起動する(S813)。
【0068】
釣竿1とモーションスティック4の双方向のアクションフィードバックが可能になると映像の送信は本実施例の示す魚釣りリアルゲームの終了まで継続する(S814)。釣竿1に装着されたWebカメラ5からの映像が送信される(S815)。映像は高速モバイルルーター2を経由し(S816)、Live映像配信サービス6に送られ、画像処理され、記録される(S817)。Live映像配信サービス6からスマートフォン3へ映像がダウンロードされスマートフォン3画面に表示される(S818)。操作者はスマートフォン3の画面から実際の釣り場の状況が見え、遠隔仮想の釣りを楽しむことができる(S819)。
【0069】
操作者は、釣りを終了させたいときはスマートフォン3より終了の指示を出す(S820)。この終了指示は、モーションスティック4を停止させる(S821)。また、Live映像配信サービス6へ映像送信の終了を要求する。(S822)。この終了のモードはLive映像配信サービス6から高速モバイルルーター2を経由して(S823)、釣竿1に伝えられ、釣竿制御ユニット30は撮影停止をWebカメラ5に伝え(S824)、Webカメラ5は撮影を停止する(S825)。次いでWebカメラ5は停止信号を釣竿制御ユニット30に伝える(S826)。一方、スマートフォン3は遠隔仮想釣り場のシステムが停止することを高速モバイルルーター2経由(S827)で釣竿1に伝え、遠隔仮想釣り場のシステムを停止する。釣竿制御ユニット30は、釣竿1機能を停止し、実際の釣り場のシステムを停止する(S828)。なお、システムの停止の方法は様々のケースが想定しうる。実施例はその一例に過ぎない。
即ち、自発的にユーザがゲームを終了するケースに当たる。最も現実的な停止方法は、タイムアウトによるものである。複雑な関連機器を順次停止するよりも楽で合理的である。
【0070】
モーションスティック4の操作を釣竿1にフィードバックする処理フローである。本実施例では、モーションスティック4から釣竿1へアクションフィードバックを起こす事象をモーションスティック4の3次元の動きに対しては、その加速度を位置の変位に換算する演算を行う。即ち、垂直方向の上下動及び水平方向の左右の振りについて再現する。更に、モーションスティック4のリール緩めボタン53とリール巻き取りボタン54の押下による仮想リールの稼動を釣竿1の電動リール31に反映させる。また、リールの速さはボタンの押下強度である。モーションは瞬間、断続、連続があるが、モーション中の変化もあり得る。これらは、継続して加速度を検出し、演算しなければ正確な速度や変位は得られない。しかし、遠隔の場所にある他の物体にそのモーションを再現するのであるから、転送スピードや送信周期により、断片的なデータを与えることになり、正確性は損なわれる。しかも、両者の環境もモーション対象の物も同じ形態を取るわけではないので、完全な正確性は無意味である。そこで、本実施例においては、モーションスティック4の3次元の加速度と仮想リールのボタン押下種別とその強度を指定された周期で送信する手段を採用した。モーションやボタン押下の実行の有無に関わらず、一定の時間間隔でモーションデータを釣竿1に送るのである。即ち、モーションスティック4の上下・左右・前後の3軸ベクトル成分を加速度センサーモジュール56から取得し、かつ、リール緩めボタン53とリール巻き取りボタン54の仮想リールのボタンから緩め/巻き取り/押下無しの区別と強度(ゼロも有り)を取得し、モーション情報として、一括して釣竿1に送るのである。釣竿1ではこのデータを分解して、竿を動かし、リールに反映させる。これらのデータ送信はゲームが終了するまで続く。また、送信データは、モーションスティック4からブルートゥース通信9により、スマートフォン3に送り、スマートフォン3を経由して、インターネットに入り、次いで、高速モバイルルーター2を経由して無線LAN8により釣竿1に到達する。
【0071】
以下、図9の処理フローを説明する。モーションスティック4の加速度センサーモジュール56から3軸(上下・左右・前後)の加速度成分の信号を取得し(S901)、同時にリール緩めボタン53とリール巻き取りボタン54から、押下及び強度の信号を得る(S902)。S903において、加速度センサー3軸のベクトル成分とリールボタン区分と強度を一連のデータフォーマット動き情報と言う)にまとめる。動き情報を釣竿1へ送信する(S904)。
【0072】
釣竿1が動き情報を受信し(S905)、動き情報を分解する(S906)。まず、縦方向ベクトル成分を抽出し、位置変位の値に換算する(S907)。この縦方向の位置変位値を垂直アクチュエーター33に与え、可動させる(S908)。次に同じ動き情報から、横方向ベクトル成分を抽出し、位置変位の値に換算する(S909)。この横方向の位置変位値を水平アクチュエーター34に与え、可動させる(S908)。S910において、同じ動き情報から、リール情報を抽出し、仮想リールのボタン(リール緩めボタン53とリール巻き取りボタン54)のどちらが押下されたか、又ははどちらも押下していないか又はは押下強度がゼロかどうかを判断する(S911)。この場合、押下強度がゼロであれば、どちらも押下していないと判断してもよい。即ち、押下強度がゼロであれば、リール稼動は無い。押下強度がゼロでないならば、リール緩めボタン53が押下されたか、リール巻き取りボタン54が押下されたので、どちらかを判断し、その強度分のリール移動長を換算し(S912)、電動リール31を緩め又は巻き取る(S913)。S901からS913のふるまいは、ゲーム終了まで、データ送信の度に実行する。
【0073】
次に、釣竿1のモーションをモーションスティック4にフィードバックする処理について説明する。図10は、釣竿1の動きをモーションスティック4にフィードバックする処理フローである。釣竿1からモーションスティック4へのアクションフィードバックを行なうモーションは、魚が餌を銜え、アタリを荷重センサー35に発生させたときと、その後、引きを継続する場合である。アタリは最初の引きであり、その後の引きは、魚を釣り上げるか逃げられるかまで、断続的、連続的に起こる。引きが始まると、モーションスティック4の動き情報と同様に、一定時間間隔で周期的に引きの強度情報を送信し、モーションスティック4の引きのモーションとして再現させる。これが、モーションスティック4へのアクションフィードバックである。引きは釣竿1の荷重センサー35に掛る圧力であり、引きの方向は1軸ではなく、四方、即ち3軸になる。ただし、本実施例では、1個の荷重センサー35を使用するので、1軸の情報しか取得しない。なお、最初の引きであるアタリまでは、釣竿1からモーションスティック4へは動き情報を送信しない。アタリ以後は、指定時間間隔で引きの強度を送信する。釣竿1からの送信は、無線LAN8により、高速モバイルルーター2に到達し、高速モバイルルーター2経由でインターネットに入り、更にスマートフォン3経由でブルートゥース通信9によりモーションスティック4に到着するものである。
【0074】
以下、図10の処理フローを説明する。S1000は、魚を釣り上げるか、逃すか、又はゲームを終了するまで繰り返す。S1001において、荷重センサー35からの信号を待つ。信号があったとき、引きの強さがアタリ強度と設定した基準値より小さいかどうか判断する(S1002)。小さい場合は、ノイズとして無視する。アタリ基準値以上の場合は、アタリと判断し、釣り上げの実行モードに入る。魚のアタリには素早く反応しなければ、逃げられる。本発明は遠隔地とのアクションフィードバックの技術であるが、遠隔地にいる人間の操作者の応答を待つ余裕はないと想定し、魚への合わせは自律的に釣竿1が実行する機能を入れた。即ち、アタリになると、まず、垂直アクチュエーター33に上方へ一定の変位を起こさせる(S1003)。これは合わせであり、竿を上方に上げる。次にアタリの情報をモーションスティック4に送信する(S1004)。また、餌に魚が食いついたので、外れないように電動リール31を一定長分、巻き取る作業を自律的に実行する(S1005)。S1006において、この後の魚の引きは断続的、連続的にくるので、釣る上げまで、引きの強度(荷重センサー35の引っ張り)を検出し(S1007)、指定の時間間隔で周期的にモーションスティック4に送信する(S1008)。
【0075】
モーションスティック4では、釣竿1からのアクションフィードバックのデータ送信を待ち、引きのデータを受信する(S1009)。引きの受信は、最初の引きデータであるかをアタリモードのオンオフで判断する(S1010)。アタリモードがオフであった場合は、アタリ再現モジュール58にアタリの再現を指令する。この場合、アタリの強度の程度に応じて、アタリ再現モジュール58の衝撃(引きの加速度)を計算してアタリを再現する(S1011)。なお、アタリは、アタリ再現モジュール58内のおもりをバネで引っ張り、加速度を与えることで生じる。また、本実施例では、アタリを体感的に強めるため、振動モジュール59により振動も加える(S1012)。この振動の強さは、アタリの強度に応じて計算する。最初の引きがアタリであったので、アタリモードをオンにして(S1013)、次の引きを待つ。S1010に戻る。アタリモードがオンであった場合は、既にアタリの引きが生じているので、以後は、餌に食い付いた魚の引きである。S1014で、引き強度がゼロかを判断する。ゼロならば、引きは中断しているので、次のデータ送信を待つ。なお、引きの状態にいるときは、引きが無くても、釣竿1から指定時間間隔で引きデータが送信される。引きがあった場合は、アタリ再現モジュール58は引きの衝撃を出力する(S1015)。引きのアタリ再現モジュール58のふるまいは、おもりによる加速度の衝撃を断続的に出力することで実現する。しかし、バネの引っ張りはすぐに無くなるので、再度、バネを引っ張り、おもりを上下動させる。また、引きを体感的に高めるため、引きの強度に応じた振動を発生させる(S1016)。この後、次の引きのデータ送信を待つ。
【0076】
本実施例は、実際の釣り場における釣竿1を無線LAN8で高速モバイルルーター2に通信し、高速モバイルルーター2でインターネットに中継し、インターネットからスマートフォン3に接続し、スマートフォン3はモーションスティック4とブルートゥース通信9で接続する方式を採用している。しかし、専用線又は屋内の無線LAN、更には有線等を使用し、その一部の回線を替えて、本発明と同等の双方向アクションフィードバックによるリアルゲームシステムを実施したとしても、その実施形態は、本発明に含まれることは言うまでもない。
【符号の説明】
【0077】
1 釣竿
2 高速モバイルルーター
3 スマートフォン
4 モーションスティック
5 Webカメラ
6 Live映像配信サービス
7 PC
8 無線LAN
8−1 無線LAN
9 ブルートゥース通信
30 釣竿制御ユニット
31 電動リール
32 無線LANアンテナ
33 垂直アクチュエーター
34 水平アクチュエーター
35 荷重センサー
36 釣り糸
40 マイクロプロセッサ(釣竿制御)
41 Webカメラインターフェイス
42 荷重センサーインターフェイス
43 電動リールインターフェイス
44 無線LANインターフェイス
45 垂直アクチュエーターインターフェイス
46 水平アクチュエーターインターフェイス
47 ROM(釣竿制御)
48 RAM(釣竿制御)
50 スティック筐体
51 握り柄
52 オン/オフスイッチ
53 リール緩めボタン
54 リール巻き取りボタン
55 モーションスティック制御ユニット
56 加速度センサーモジュール
57 ブルートゥースモジュール
58 アタリ再現モジュール
59 振動モジュール
60 マイクロプロセッサ(モーションスティック制御)
61 加速度センサーインターフェイス
62 アタリ再現モジュールインターフェイス
63 ブルートゥースインターフェイス
64 振動モジュールインターフェイス
65 ボタン制御インターフェイス
66 ROM(モーションスティック制御)
67 RAM(モーションスティック制御)
70 おもり
71 バネ1番
71−1 バネ1番(伸び)
71−2 バネ1番(縮み)
71−3 バネ1番(引き)
72 バネ2番
72−1 バネ2番(伸び)
72−2 バネ2番(縮み)
72−3 バネ2番(引き)
73 ワイヤー
73−1 ワイヤー(巻き)
73−2 ワイヤー(緩み)
73−3 ワイヤー(引き)
74 モーター
75 プーリー
76 モーター作動チョッパ
【特許請求の範囲】
【請求項1】
釣り糸の張力を検出する張力データ検出手段と回転データを受けて回転する電動リール機構と前記張力データを送信し、前記回転データを受信する第1の通信手段とを備えた釣竿と、
前記釣竿を装着し、動きデータを受けて該釣竿を上下及び左右に動かすアクチュエーター機構と前記動きデータを受信する第2の通信手段とを備えた釣竿支持台と、
前記釣竿を使用する実際の釣り場を撮影し、ライブ映像を送信する第3の通信手段を備えた撮影機と、
前記ライブ映像を受信・表示する第4の通信手段を有する端末装置と、
自己の動きを検出する前記動きデータ検出手段と自己に加速度を生じさせる加速度発生手段と前記回転データを生成する仮想リール手段とを備え、かつ前記動きデータと前記回転データを送信し、前記張力データを受信する第5の通信手段を有する前記釣竿に見立てたモーションスティックと、
を具備し、
前記モーションスティックは、受信した前記張力データに応じた加速度を前記加速度発生手段により発生させて、前記釣り糸の張力を再現し、
前記電動リール機構は、受信した前記回転データに応じて回転し、
前記アクチュエーター機構は、受信した前記動きデータに応じた前記釣竿を動かすことによって前記モーションスティックの動きを再現し、
前記釣竿と前記モーションスティックとの間の双方のアクションフィードバックを実行することを特徴とする魚釣りリアルゲームシステム。
【請求項2】
前記加速度発生手段は、前記張力データの示す張力と同等の力でバネに結び付けられたおもりをワイヤーで引き、該ワイヤーの引きを解放することにより、前記おもりが、伸長した該バネを縮ませることにより加速度を発生させることを特徴とする請求項1に記載の魚釣りリアルゲームシステム。
【請求項3】
前記張力データ検出手段は、前記釣り糸の引きの力を荷重センサーに伝え、該荷重センサーにより検出された圧力を前記張力データに格納することを特徴とする請求項1又は2に記載の魚釣りリアルゲームシステム。
【請求項4】
前記張力データ検出手段は、少なくとも1軸の加速度センサーを備え、前記加速度センサーが検出する引きによって生じた加速度を張力に換算し、前記張力データに格納することを特徴とする請求項1又は2に記載の魚釣りリアルゲームシステム。
【請求項5】
前記仮想リール手段は、巻き取り回転ボタンと緩め回転ボタンの押下強度を速さ度合の数値として取得し、前記巻き取り方向又は緩める方向の区分情報と共に前記回転データに格納することを特徴とする請求項1乃至4の何れかに記載の魚釣りリアルゲームシステム。
【請求項6】
前記電動リール機構は、前記回転データに含まれる巻き取り方向又は緩める方向の区分情報と速さの数値情報に基づき、前記電動リールを回転させることを特徴とする請求項1乃至5の何れかに記載の魚釣りリアルゲームシステム。
【請求項7】
前記動きデータ検出手段は、少なくとも2軸の加速度センサーを備え、前記加速度センサーが検出する前記モーションスティックの動きにより生じた加速度の垂直成分と水平成分を前記動きデータに格納することを特徴とする請求項1乃至6の何れかに記載の魚釣りリアルゲームシステム。
【請求項8】
前記アクチュエーター機構は、前記動きデータに含まれる加速度の垂直成分と水平成分を抽出し、指定された基準時間に基づき得られた移動距離に換算して、前記釣竿を上下方向と水平方向に移動させる制御を実行することを特徴とする請求項1乃至7の何れかに記載の魚釣りリアルゲームシステム。
【請求項9】
前記撮影機は、Webカメラ又はネットワークカメラを含むことを特徴とする請求項1乃至8の何れかに記載の魚釣りリアルゲームシステム。
【請求項10】
前記端末装置は、携帯情報端末、タブレット端末、ノートPC、PC、又はインターネットテレビを含むことを特徴とする請求項1乃至9の何れかに記載の魚釣りリアルゲームシステム。
【請求項11】
前記第1から第4の通信手段が接続する回線のそれぞれは、有線若しくは無線によるインターネット、LANルータを介してインターネットと接続する有線若しくは無線LAN、又はモバイルルーターを介してインターネットと接続する無線LANのいずれかを含むことを特徴とする請求項1乃至10の何れかに記載の魚釣りリアルゲームシステム。
【請求項12】
前記第5の通信手段が接続する回線は、端末を介してインターネットと結ぶ近接無線回線若しくは赤外線通信、無線によるインターネット、LANルータを介してインターネットと接続する無線LAN、又はモバイルルーターを介してインターネットと接続する無線LANのいずれかを含むことを特徴とする請求項1乃至11の何れかに記載の魚釣りリアルゲームシステム。
【請求項1】
釣り糸の張力を検出する張力データ検出手段と回転データを受けて回転する電動リール機構と前記張力データを送信し、前記回転データを受信する第1の通信手段とを備えた釣竿と、
前記釣竿を装着し、動きデータを受けて該釣竿を上下及び左右に動かすアクチュエーター機構と前記動きデータを受信する第2の通信手段とを備えた釣竿支持台と、
前記釣竿を使用する実際の釣り場を撮影し、ライブ映像を送信する第3の通信手段を備えた撮影機と、
前記ライブ映像を受信・表示する第4の通信手段を有する端末装置と、
自己の動きを検出する前記動きデータ検出手段と自己に加速度を生じさせる加速度発生手段と前記回転データを生成する仮想リール手段とを備え、かつ前記動きデータと前記回転データを送信し、前記張力データを受信する第5の通信手段を有する前記釣竿に見立てたモーションスティックと、
を具備し、
前記モーションスティックは、受信した前記張力データに応じた加速度を前記加速度発生手段により発生させて、前記釣り糸の張力を再現し、
前記電動リール機構は、受信した前記回転データに応じて回転し、
前記アクチュエーター機構は、受信した前記動きデータに応じた前記釣竿を動かすことによって前記モーションスティックの動きを再現し、
前記釣竿と前記モーションスティックとの間の双方のアクションフィードバックを実行することを特徴とする魚釣りリアルゲームシステム。
【請求項2】
前記加速度発生手段は、前記張力データの示す張力と同等の力でバネに結び付けられたおもりをワイヤーで引き、該ワイヤーの引きを解放することにより、前記おもりが、伸長した該バネを縮ませることにより加速度を発生させることを特徴とする請求項1に記載の魚釣りリアルゲームシステム。
【請求項3】
前記張力データ検出手段は、前記釣り糸の引きの力を荷重センサーに伝え、該荷重センサーにより検出された圧力を前記張力データに格納することを特徴とする請求項1又は2に記載の魚釣りリアルゲームシステム。
【請求項4】
前記張力データ検出手段は、少なくとも1軸の加速度センサーを備え、前記加速度センサーが検出する引きによって生じた加速度を張力に換算し、前記張力データに格納することを特徴とする請求項1又は2に記載の魚釣りリアルゲームシステム。
【請求項5】
前記仮想リール手段は、巻き取り回転ボタンと緩め回転ボタンの押下強度を速さ度合の数値として取得し、前記巻き取り方向又は緩める方向の区分情報と共に前記回転データに格納することを特徴とする請求項1乃至4の何れかに記載の魚釣りリアルゲームシステム。
【請求項6】
前記電動リール機構は、前記回転データに含まれる巻き取り方向又は緩める方向の区分情報と速さの数値情報に基づき、前記電動リールを回転させることを特徴とする請求項1乃至5の何れかに記載の魚釣りリアルゲームシステム。
【請求項7】
前記動きデータ検出手段は、少なくとも2軸の加速度センサーを備え、前記加速度センサーが検出する前記モーションスティックの動きにより生じた加速度の垂直成分と水平成分を前記動きデータに格納することを特徴とする請求項1乃至6の何れかに記載の魚釣りリアルゲームシステム。
【請求項8】
前記アクチュエーター機構は、前記動きデータに含まれる加速度の垂直成分と水平成分を抽出し、指定された基準時間に基づき得られた移動距離に換算して、前記釣竿を上下方向と水平方向に移動させる制御を実行することを特徴とする請求項1乃至7の何れかに記載の魚釣りリアルゲームシステム。
【請求項9】
前記撮影機は、Webカメラ又はネットワークカメラを含むことを特徴とする請求項1乃至8の何れかに記載の魚釣りリアルゲームシステム。
【請求項10】
前記端末装置は、携帯情報端末、タブレット端末、ノートPC、PC、又はインターネットテレビを含むことを特徴とする請求項1乃至9の何れかに記載の魚釣りリアルゲームシステム。
【請求項11】
前記第1から第4の通信手段が接続する回線のそれぞれは、有線若しくは無線によるインターネット、LANルータを介してインターネットと接続する有線若しくは無線LAN、又はモバイルルーターを介してインターネットと接続する無線LANのいずれかを含むことを特徴とする請求項1乃至10の何れかに記載の魚釣りリアルゲームシステム。
【請求項12】
前記第5の通信手段が接続する回線は、端末を介してインターネットと結ぶ近接無線回線若しくは赤外線通信、無線によるインターネット、LANルータを介してインターネットと接続する無線LAN、又はモバイルルーターを介してインターネットと接続する無線LANのいずれかを含むことを特徴とする請求項1乃至11の何れかに記載の魚釣りリアルゲームシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7−1】
【図7−2】
【図8】
【図9】
【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7−1】
【図7−2】
【図8】
【図9】
【図10】
【公開番号】特開2013−111136(P2013−111136A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−258364(P2011−258364)
【出願日】平成23年11月26日(2011.11.26)
【出願人】(592024435)
【出願人】(711005776)アスカ・クリエイション株式会社 (4)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月26日(2011.11.26)
【出願人】(592024435)
【出願人】(711005776)アスカ・クリエイション株式会社 (4)
【Fターム(参考)】
[ Back to top ]