
おしぼり包装機
【課題】小型でメンテナンスの良いおしぼり包装機を提供する。
【解決手段】ACステッピングモーター1を正逆転させることによって、スポンジアーム5を往復運動させることを特徴とするおしぼり包装機である。
【解決手段】ACステッピングモーター1を正逆転させることによって、スポンジアーム5を往復運動させることを特徴とするおしぼり包装機である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、おしぼり包装機、特にその駆動部分に関するものである。
【背景技術】
【0002】
周知のように、飲食店等で広く使用されているおしぼりは、湿潤状態の小型タオルを円柱状に巻き上げ成形し、樹脂フイルムで包装されている。おしぼりの使用後には、洗浄殺菌され、再び巻き上げ形成及び包装されて使用されている。
【0003】
このようなおしぼりを自動的に巻き上げ成形して包装するおしぼり包装機として、例えば、特公昭55−26046号公報と実公昭55−39761号公報に記載されているおしぼり包装機がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特公昭55−26046号公報
【特許文献2】実公昭55−39761号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のおしぼり「包装機は大型化しており、メンテナンスも大変である。
【課題を解決するための手段】
【0006】
そこで、このような課題を解決するために、本発明のおしぼり包装機は、ACステッピングモーターを正逆転させることによって、スポンジアームを往復運動させることを、特徴とするおしぼり包装機。
【発明の効果】
【0007】
本発明のおしぼり包装機は、小型で、メンテナンスも容易である。
【図面の簡単な説明】
【0008】
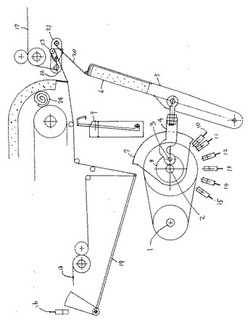
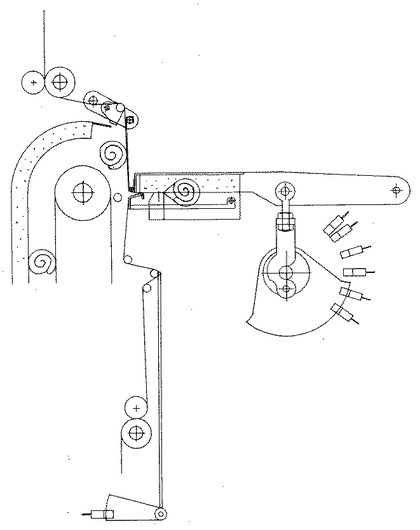
【図1】おしぼりが入る前の状態を表わした図面
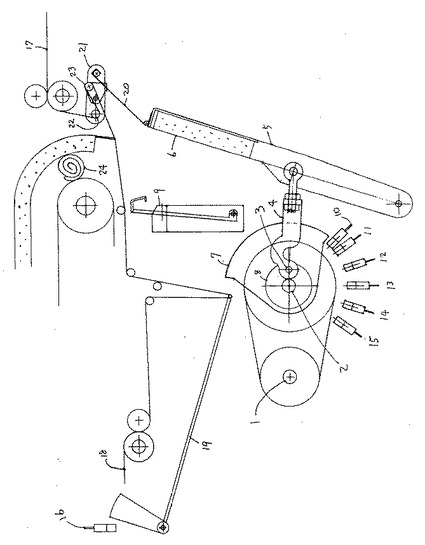
【図2】おしぼりが入った状態を表わした図面
【図3】フィルムの中におしぼりが入り圧着(溶着)された状態を表わした図面
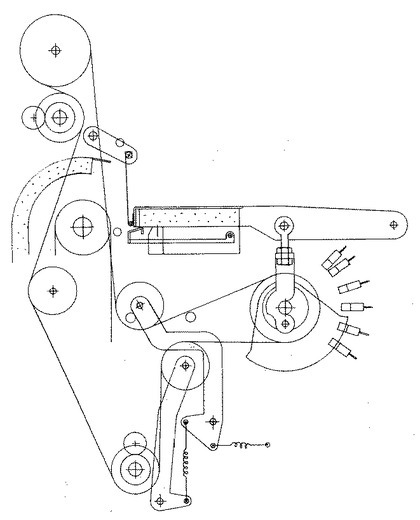
【図4】図3の状態で次のおしぼりが入った状態を表わした図面
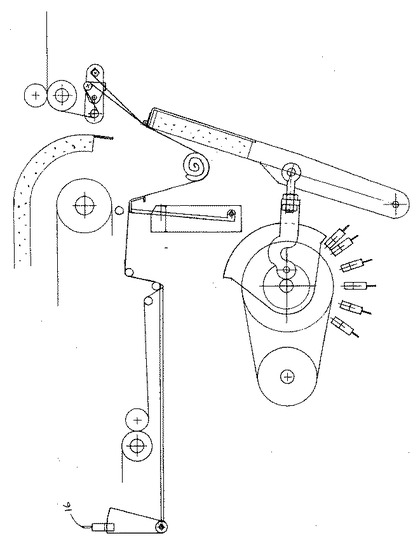
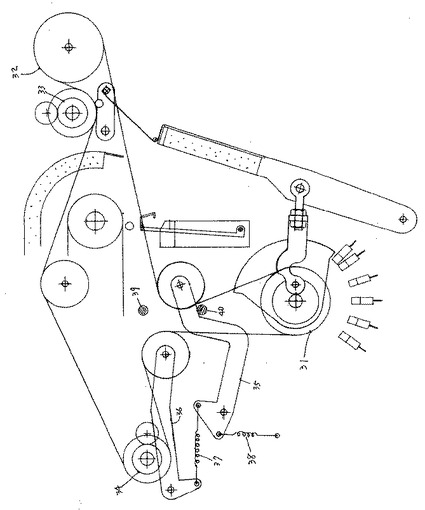
【図5】フィルムを送る前の状態おしぼりが入る前を表わした図面
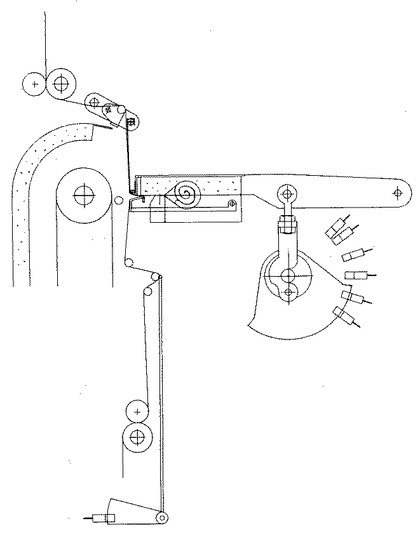
【図6】圧着後開く時寸前(フィルムガ送る前)の状態を表わした図面
【発明を実施する為の形態】
【0009】
本発明のおしぼり包装機のヒーターとスポンジの圧着作動構造を説明する。
まず、モーター単体による構造を説明する。
モーターの特長は超低速シンクロナスモーターと云いACステッピングモーターとも云います。連続で瞬時正逆転が可能です。
図1はおしぼりが入る寸前の状態で8クランクホイールの3振レ軸は、直右に位置するその状態は5スポンジアームが9ヒーターより最大に開き、クランク羽根は10センサー(原点)から2〜3mm離れた所にあり、2クランク軸は1モーターとチェンで直結されている、モーターの性能は電源周波数(AC−100V)で回転し、50Hzで60rpm 60Hzで72rpm回転し、連続で瞬時正逆転が可能であり又、電源がOFFの時はブレーキの働きがあり又、ACステッピングモーターには過負荷になると脱調します、正規のトルクが落ちれば機械が壊れにくくなります、図−1はスタート待ちの状態であり、そしておしぼりが入り図−2の状態になり16おしぼり検知センサーがONして1モーターが左回転7クランク羽根が180度まで作動し(4クランクアームの形状では180度でストップ図−3より左回転しない又、全角度は270度まで動く)そして図−2の位置スタートから左回転180度の所(図−3)で逆転(右回転)します、すなわち、スタート時点から1モーターは時間制御(タイマー)で180度の位置から逆転に入り、今までの動きはクランク位置センサー10(原点)は通過しておらず、他の位置センサー11〜15はOFFの状態です、そして逆転に入ってから右回転180度(図−1)を過ぎるとクランク位置センサー10(原点)にクランク羽根が通過するとクランク位置センサー11〜15(フィルムの大きさを設定)がONの状態になり、今回位置センサー11に設定しますと、クランク羽根がクランク位置センサー10(原点)を通過して11センサーがONになればモーターは逆転(左回転)してクランク位置セシサー10(原点)を通過すればすぐに全停止状態になると同時に次のスタート待ちの状態になります(図−1の状態)今まではクランク軸の説明です、
【0010】
次はフィルム送りと包装を説明する。
フィルム送りはクランク軸に31フリーホイルスプロケットA(図−5)が付き軸は左回転の時はスプロケットはフリーになり、右回転の時はスプロケットは軸と同時に回転する31フリーホイルスプロケットAと33フィルム送りローラーAと34フィルム送りローラーBとがチェンでつながっており31フリーホイルスプロケットAが右回転すれば、フィルム2本17フィルムA18フィルムBが同時に送られる
【0011】
次に、スタートからタイマーの設定を説明する。
なぜ時間制御する必要があるか。
スタート(始動)から180度(左回転)動きはおしぼりがフィルムに入り、包装5スポンジアームが圧着しない時(おしぼりがバラける、おしぼりの先がヒーターの刃とスポンジに挟まれる)では180度の位置決めでは180度まで届かない(モーターがストップ)そうすると4秒以上のストップの状態だと包装機が非常検出が働きアラーム出力して全停止してしまい、これでは連続作業することは出来ない、そこで時間制御すれば包装不良(圧着不良)でもスタートが必ず180度まで作動しなくても、クランクが時間で、反転すれば連続作業が出来る又、おしぼりがフィルムとつながった状態(フィルムが切れない)だと包装機が再スタート(19おしぼり検知羽根が上がる)して次のフィルムが送られていくので再圧着しておしぼり切り離せれば自動再生する。連続作業するための時間制御です(時間と180度作動角度はタイマーで合す)
【0012】
次にフィルム送りの機能を説明する。
8クランクホイールの190度〜270度角度の往復運動で全フィルム送りをします
スタートの状態と云うのは前回サイクルでおしぼりの包装ができ、おしぼりが切り離され、次の1本分のフィルムが送られて停止した状態が次のスタートが出来る状態です。
図5では
フィルム送りのローラーチェンは1本です。35チェンテンションアームAと36チェンテンションアームBに37引バネが互いに引っ張り合っており、チェン張りは、この37引バネのみで互いに35アームAと36アームBはチェンを上に持ち上げています35チェンテンションアームAは別の38引バネがあり本体に取り付けています
図5ではスタート時点ですフィルムの状態は図−1でスタート時点です
おしぼりが入れば(図2)1モーターが作動2クランク軸と8クランクホイルは左回転しだします、5スポンジアームは9ヒーターに圧着する方向にて、そして2クランク軸に直結して31フリーホイルが付いており、軸が左回転する時はフリーホイルの歯車はフリーの状態(動かない)でも、35チェンテンションアームAと36チェンテンションアームBとはチェン張りには働くが35チェンテンションアームAは別の38引バネで本体に引っ張られていてフリーホイルの歯車は35チェンテンションアームAは39上側ストッパーに当たるまで左回転するまだ2クランク軸が左回転してもチェンは動かない。フリーホイルがフリーの回転方向だからです
スタートから左回転(2クランク軸)で180度作動すれば反転します、その時点は図6でフィルムは図3の状態です、次に反転(右回転)に入り2クランク軸が右回転になると31フリーホイルスプロケットAは送る方向軸と歯車が直結になり、ローラーチェンが右回転方向に動きフィルムが送られる、だが、35チェンテンションアームAは39上側のストッパーの位置から先ず下に動き、40下側ストッパーまでの動きは33,34フィルム送りローラーは動かない、40下側ストッパーに当たってからの右回転(2クランク軸)でローラーチェンが送りフィルムが送られる
フィルムの送る回転トルクにより38引バネが弱いため35チェンテンションアームAは下にさがります
39上側のストッパーから40下側ストッパーの動きはあそび角度といい、図6と図3を見て反転してから(右回転)9ヒーターと5スポンジアームが開き始めてもフィルム送りのあそび角度分遅れてフィルムが送られます、ですから、フィルム押さえスポンジにフィルムが付かなくなります、フィルムが動かす5スポンジアームが先に開くのでフィルムが離れやすくなる、
2クランク軸がスタートから左回転して180度点で反転右回転し図−5の状態を過ぎてクランク位置センサー10(原点)にクランク羽根が通過してクランク位置センサー11〜15設定した所でクランク羽根がくれば、反転(左回転)しクランク位置センサー10(原点)通過してすぐ停止する、この時点で再スタート状態となる
クランク位置センサーの取り付け角度は
10の点から11の点 = 9度(角度)
11の点から12の点 = 18度(角度)
↓
ピッチ18度
フィルムの大きさが11が最小15が最大
フリーホイルのツメ割出しは20等分 18度です
【0013】
次に、おしぼり受皿とフィルム送り補助アーム機能を説明する。
図1に図示しているように、
20おしぼり受皿機能は5スポンジアームの上部に長蝶番で固定され、片方は21フィルム送り補助アームの回転軸に取り付けられている
スポンジアームが開いた状態は図1で
スポンジアームが閉じた状態は図3です
おしぼり包装機の作業スピードは人の手の速さで決まります、人の手の速さは早いとき、遅いときと不安定です、又、早いスピードのまま続けるのは不可能あり、そのため早い時は図4で表すように、まず始めのおしぼりがパック、圧着している時に次のおしぼりは20受皿で待機させる事で連続に作業が出来るようにします
又、20受皿の作動する21フィルム送り補助アームの別機能の働きを同時に行う事で、フィルムのパック状態を安定させます
21フィルム送り補助アーム機能はパックする時、フィルムの溶着の安定が目的です
図2でおしぼりが入り、9ヒーターと6スポンジの間におしぼりがぶらさがり6フィルム押えスポンジが作動圧着する時、図218フィルムB19検知羽根側はフィルムがピンと張ります、17フィルムA側は、21フィルム送り補助アームの22固定柱とフィルムテンションアームを通りおしぼりに対してフィルムのたぐりを作っており、そして図2から図3に作動する時、5スポンジアームが圧着する時フィルムのたぐりはおしぼり側に送られ、圧着する時おしぼりが持ち上がらないようにします、又、21フィルム送り補助アームの中心にある23フィルムテンションの働きで圧着の安定するようになります
もしたぐりが無い時は、17フィルムAのみがスポンジアームに引き上げられて、おしぼりが回転を起こして、おしぼりの形がくずれることがあります
図3で圧着する寸前は18フィルムB側は張ったまま17フィルムAも張ったままになる、5スポンジアームが圧着する手前はおしぼりが挟まれ、そして圧着する18フィルムB側はメカ的に引っ張りは無い、フィルムA側はスポンジアームが作動するため、おしぼりが挟まれてからでも、まだ圧着の方向に動きます、その時のフィルムの張りを逃がすために23フィルムテンションアームが右回転して張りを逃がす働きをする(23フィルムテンションアームは常時左回転にバネの力が働いている)
もし、フィルムテンションアームの働きが無ければフィルムAとフィルムBの溶着は安定しません
おしぼりを完全にパックするには20受皿とフィルムのたぐりと23フィルムテンションが必要です
【符号の説明】
【0014】
1.モーター軸
2.クランク軸
3.クランク振れ軸
4.クランクアーム
5.スポンジアーム
6.フィルム押さえスポンジ
7.クランク羽根
8.クランクホイール
9.ヒーター
10.原点センサー
11.袋の大きさを定めるセンサー
12.袋の大きさを定めるセンサー
13.袋の大きさを定めるセンサー
14.袋の大きさを定めるセンサー
15.袋の大きさを定めるセンサー
16.おしぼり検知センサー
17.フィルムA
18.フィルムB
19.おしぼり検知羽根
20.おしぼり受け皿
21.フィルム送り補助アーム
22.固定柱
23.フィルムテンションアーム
24.おしぼり
31.フィリーホイル スプロケットA
32.フィリーホイル スプロケットB
33.フィルム送りローラーA
34.フィルム送りローラーB
35.チェンテンションアームA
36.チェンテンションアームB
37.引きバネ
38.引きバネ
39.上側ストッパー
40.下側ストッパー
【技術分野】
【0001】
本発明は、おしぼり包装機、特にその駆動部分に関するものである。
【背景技術】
【0002】
周知のように、飲食店等で広く使用されているおしぼりは、湿潤状態の小型タオルを円柱状に巻き上げ成形し、樹脂フイルムで包装されている。おしぼりの使用後には、洗浄殺菌され、再び巻き上げ形成及び包装されて使用されている。
【0003】
このようなおしぼりを自動的に巻き上げ成形して包装するおしぼり包装機として、例えば、特公昭55−26046号公報と実公昭55−39761号公報に記載されているおしぼり包装機がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特公昭55−26046号公報
【特許文献2】実公昭55−39761号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のおしぼり「包装機は大型化しており、メンテナンスも大変である。
【課題を解決するための手段】
【0006】
そこで、このような課題を解決するために、本発明のおしぼり包装機は、ACステッピングモーターを正逆転させることによって、スポンジアームを往復運動させることを、特徴とするおしぼり包装機。
【発明の効果】
【0007】
本発明のおしぼり包装機は、小型で、メンテナンスも容易である。
【図面の簡単な説明】
【0008】
【図1】おしぼりが入る前の状態を表わした図面
【図2】おしぼりが入った状態を表わした図面
【図3】フィルムの中におしぼりが入り圧着(溶着)された状態を表わした図面
【図4】図3の状態で次のおしぼりが入った状態を表わした図面
【図5】フィルムを送る前の状態おしぼりが入る前を表わした図面
【図6】圧着後開く時寸前(フィルムガ送る前)の状態を表わした図面
【発明を実施する為の形態】
【0009】
本発明のおしぼり包装機のヒーターとスポンジの圧着作動構造を説明する。
まず、モーター単体による構造を説明する。
モーターの特長は超低速シンクロナスモーターと云いACステッピングモーターとも云います。連続で瞬時正逆転が可能です。
図1はおしぼりが入る寸前の状態で8クランクホイールの3振レ軸は、直右に位置するその状態は5スポンジアームが9ヒーターより最大に開き、クランク羽根は10センサー(原点)から2〜3mm離れた所にあり、2クランク軸は1モーターとチェンで直結されている、モーターの性能は電源周波数(AC−100V)で回転し、50Hzで60rpm 60Hzで72rpm回転し、連続で瞬時正逆転が可能であり又、電源がOFFの時はブレーキの働きがあり又、ACステッピングモーターには過負荷になると脱調します、正規のトルクが落ちれば機械が壊れにくくなります、図−1はスタート待ちの状態であり、そしておしぼりが入り図−2の状態になり16おしぼり検知センサーがONして1モーターが左回転7クランク羽根が180度まで作動し(4クランクアームの形状では180度でストップ図−3より左回転しない又、全角度は270度まで動く)そして図−2の位置スタートから左回転180度の所(図−3)で逆転(右回転)します、すなわち、スタート時点から1モーターは時間制御(タイマー)で180度の位置から逆転に入り、今までの動きはクランク位置センサー10(原点)は通過しておらず、他の位置センサー11〜15はOFFの状態です、そして逆転に入ってから右回転180度(図−1)を過ぎるとクランク位置センサー10(原点)にクランク羽根が通過するとクランク位置センサー11〜15(フィルムの大きさを設定)がONの状態になり、今回位置センサー11に設定しますと、クランク羽根がクランク位置センサー10(原点)を通過して11センサーがONになればモーターは逆転(左回転)してクランク位置セシサー10(原点)を通過すればすぐに全停止状態になると同時に次のスタート待ちの状態になります(図−1の状態)今まではクランク軸の説明です、
【0010】
次はフィルム送りと包装を説明する。
フィルム送りはクランク軸に31フリーホイルスプロケットA(図−5)が付き軸は左回転の時はスプロケットはフリーになり、右回転の時はスプロケットは軸と同時に回転する31フリーホイルスプロケットAと33フィルム送りローラーAと34フィルム送りローラーBとがチェンでつながっており31フリーホイルスプロケットAが右回転すれば、フィルム2本17フィルムA18フィルムBが同時に送られる
【0011】
次に、スタートからタイマーの設定を説明する。
なぜ時間制御する必要があるか。
スタート(始動)から180度(左回転)動きはおしぼりがフィルムに入り、包装5スポンジアームが圧着しない時(おしぼりがバラける、おしぼりの先がヒーターの刃とスポンジに挟まれる)では180度の位置決めでは180度まで届かない(モーターがストップ)そうすると4秒以上のストップの状態だと包装機が非常検出が働きアラーム出力して全停止してしまい、これでは連続作業することは出来ない、そこで時間制御すれば包装不良(圧着不良)でもスタートが必ず180度まで作動しなくても、クランクが時間で、反転すれば連続作業が出来る又、おしぼりがフィルムとつながった状態(フィルムが切れない)だと包装機が再スタート(19おしぼり検知羽根が上がる)して次のフィルムが送られていくので再圧着しておしぼり切り離せれば自動再生する。連続作業するための時間制御です(時間と180度作動角度はタイマーで合す)
【0012】
次にフィルム送りの機能を説明する。
8クランクホイールの190度〜270度角度の往復運動で全フィルム送りをします
スタートの状態と云うのは前回サイクルでおしぼりの包装ができ、おしぼりが切り離され、次の1本分のフィルムが送られて停止した状態が次のスタートが出来る状態です。
図5では
フィルム送りのローラーチェンは1本です。35チェンテンションアームAと36チェンテンションアームBに37引バネが互いに引っ張り合っており、チェン張りは、この37引バネのみで互いに35アームAと36アームBはチェンを上に持ち上げています35チェンテンションアームAは別の38引バネがあり本体に取り付けています
図5ではスタート時点ですフィルムの状態は図−1でスタート時点です
おしぼりが入れば(図2)1モーターが作動2クランク軸と8クランクホイルは左回転しだします、5スポンジアームは9ヒーターに圧着する方向にて、そして2クランク軸に直結して31フリーホイルが付いており、軸が左回転する時はフリーホイルの歯車はフリーの状態(動かない)でも、35チェンテンションアームAと36チェンテンションアームBとはチェン張りには働くが35チェンテンションアームAは別の38引バネで本体に引っ張られていてフリーホイルの歯車は35チェンテンションアームAは39上側ストッパーに当たるまで左回転するまだ2クランク軸が左回転してもチェンは動かない。フリーホイルがフリーの回転方向だからです
スタートから左回転(2クランク軸)で180度作動すれば反転します、その時点は図6でフィルムは図3の状態です、次に反転(右回転)に入り2クランク軸が右回転になると31フリーホイルスプロケットAは送る方向軸と歯車が直結になり、ローラーチェンが右回転方向に動きフィルムが送られる、だが、35チェンテンションアームAは39上側のストッパーの位置から先ず下に動き、40下側ストッパーまでの動きは33,34フィルム送りローラーは動かない、40下側ストッパーに当たってからの右回転(2クランク軸)でローラーチェンが送りフィルムが送られる
フィルムの送る回転トルクにより38引バネが弱いため35チェンテンションアームAは下にさがります
39上側のストッパーから40下側ストッパーの動きはあそび角度といい、図6と図3を見て反転してから(右回転)9ヒーターと5スポンジアームが開き始めてもフィルム送りのあそび角度分遅れてフィルムが送られます、ですから、フィルム押さえスポンジにフィルムが付かなくなります、フィルムが動かす5スポンジアームが先に開くのでフィルムが離れやすくなる、
2クランク軸がスタートから左回転して180度点で反転右回転し図−5の状態を過ぎてクランク位置センサー10(原点)にクランク羽根が通過してクランク位置センサー11〜15設定した所でクランク羽根がくれば、反転(左回転)しクランク位置センサー10(原点)通過してすぐ停止する、この時点で再スタート状態となる
クランク位置センサーの取り付け角度は
10の点から11の点 = 9度(角度)
11の点から12の点 = 18度(角度)
↓
ピッチ18度
フィルムの大きさが11が最小15が最大
フリーホイルのツメ割出しは20等分 18度です
【0013】
次に、おしぼり受皿とフィルム送り補助アーム機能を説明する。
図1に図示しているように、
20おしぼり受皿機能は5スポンジアームの上部に長蝶番で固定され、片方は21フィルム送り補助アームの回転軸に取り付けられている
スポンジアームが開いた状態は図1で
スポンジアームが閉じた状態は図3です
おしぼり包装機の作業スピードは人の手の速さで決まります、人の手の速さは早いとき、遅いときと不安定です、又、早いスピードのまま続けるのは不可能あり、そのため早い時は図4で表すように、まず始めのおしぼりがパック、圧着している時に次のおしぼりは20受皿で待機させる事で連続に作業が出来るようにします
又、20受皿の作動する21フィルム送り補助アームの別機能の働きを同時に行う事で、フィルムのパック状態を安定させます
21フィルム送り補助アーム機能はパックする時、フィルムの溶着の安定が目的です
図2でおしぼりが入り、9ヒーターと6スポンジの間におしぼりがぶらさがり6フィルム押えスポンジが作動圧着する時、図218フィルムB19検知羽根側はフィルムがピンと張ります、17フィルムA側は、21フィルム送り補助アームの22固定柱とフィルムテンションアームを通りおしぼりに対してフィルムのたぐりを作っており、そして図2から図3に作動する時、5スポンジアームが圧着する時フィルムのたぐりはおしぼり側に送られ、圧着する時おしぼりが持ち上がらないようにします、又、21フィルム送り補助アームの中心にある23フィルムテンションの働きで圧着の安定するようになります
もしたぐりが無い時は、17フィルムAのみがスポンジアームに引き上げられて、おしぼりが回転を起こして、おしぼりの形がくずれることがあります
図3で圧着する寸前は18フィルムB側は張ったまま17フィルムAも張ったままになる、5スポンジアームが圧着する手前はおしぼりが挟まれ、そして圧着する18フィルムB側はメカ的に引っ張りは無い、フィルムA側はスポンジアームが作動するため、おしぼりが挟まれてからでも、まだ圧着の方向に動きます、その時のフィルムの張りを逃がすために23フィルムテンションアームが右回転して張りを逃がす働きをする(23フィルムテンションアームは常時左回転にバネの力が働いている)
もし、フィルムテンションアームの働きが無ければフィルムAとフィルムBの溶着は安定しません
おしぼりを完全にパックするには20受皿とフィルムのたぐりと23フィルムテンションが必要です
【符号の説明】
【0014】
1.モーター軸
2.クランク軸
3.クランク振れ軸
4.クランクアーム
5.スポンジアーム
6.フィルム押さえスポンジ
7.クランク羽根
8.クランクホイール
9.ヒーター
10.原点センサー
11.袋の大きさを定めるセンサー
12.袋の大きさを定めるセンサー
13.袋の大きさを定めるセンサー
14.袋の大きさを定めるセンサー
15.袋の大きさを定めるセンサー
16.おしぼり検知センサー
17.フィルムA
18.フィルムB
19.おしぼり検知羽根
20.おしぼり受け皿
21.フィルム送り補助アーム
22.固定柱
23.フィルムテンションアーム
24.おしぼり
31.フィリーホイル スプロケットA
32.フィリーホイル スプロケットB
33.フィルム送りローラーA
34.フィルム送りローラーB
35.チェンテンションアームA
36.チェンテンションアームB
37.引きバネ
38.引きバネ
39.上側ストッパー
40.下側ストッパー
【特許請求の範囲】
ACステッピングモーターを正逆転させることによって、スポンジアームを往復運動させることを特徴とするおしぼり包装機
ACステッピングモーターを正逆転させることによって、スポンジアームを往復運動させることを特徴とするおしぼり包装機
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−62114(P2012−62114A)
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願番号】特願2010−225211(P2010−225211)
【出願日】平成22年9月14日(2010.9.14)
【出願人】(510264718)株式会社ささき商事 (1)
【Fターム(参考)】
【公開日】平成24年3月29日(2012.3.29)
【国際特許分類】
【出願日】平成22年9月14日(2010.9.14)
【出願人】(510264718)株式会社ささき商事 (1)
【Fターム(参考)】
[ Back to top ]