
かみあい伝達誤差の測定装置および測定方法
【課題】 負荷錘で負荷トルクを付与しつつ歯車装置を噛合い回転させてかみあい伝達誤差を測定する場合に、装置をコンパクトに維持しつつ連続測定できる回転数を増大させる。
【解決手段】 負荷錘38を吊り下げて歯車装置14に負荷トルク(噛合トルク)を付与した状態で、駆動用電動モータ28により第1回転軸20を回転駆動して噛合い回転させ、ロータリエンコーダ24、26で第1回転軸20、第2回転軸22の回転角を検出してかみあい伝達誤差を測定する。第2回転軸22の回転に伴う第1定滑車30の回転で連結ワイヤ34が第1定滑車30に巻き取られ或いは巻き戻されても、負荷錘38が略一定の高さ位置に保持されるように、同期用電動モータ40により第2定滑車32を第1定滑車30の回転に同期して回転駆動するため、負荷錘38を略一定の高さ位置に保持しつつ第1回転軸20を何回転もさせてかみあい伝達誤差を連続測定することができる。
【解決手段】 負荷錘38を吊り下げて歯車装置14に負荷トルク(噛合トルク)を付与した状態で、駆動用電動モータ28により第1回転軸20を回転駆動して噛合い回転させ、ロータリエンコーダ24、26で第1回転軸20、第2回転軸22の回転角を検出してかみあい伝達誤差を測定する。第2回転軸22の回転に伴う第1定滑車30の回転で連結ワイヤ34が第1定滑車30に巻き取られ或いは巻き戻されても、負荷錘38が略一定の高さ位置に保持されるように、同期用電動モータ40により第2定滑車32を第1定滑車30の回転に同期して回転駆動するため、負荷錘38を略一定の高さ位置に保持しつつ第1回転軸20を何回転もさせてかみあい伝達誤差を連続測定することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はかみあい伝達誤差の測定装置および測定方法に係り、特に、負荷錘で負荷トルクを付与する場合に装置をコンパクトに維持しつつかみあい伝達誤差を連続測定できる回転数を大幅に増大させる技術に関するものである。
【背景技術】
【0002】
互いに噛み合う複数の歯車を有する歯車装置を介して連結された第1回転軸および第2回転軸に所定の負荷トルクを付与した状態で、その第1回転軸を回転駆動して前記歯車装置を噛合い回転させるとともに、第1回転軸および第2回転軸の回転角をそれぞれロータリエンコーダにより検出して歯車装置のかみあい伝達誤差を測定する装置が知られている。特許文献1に記載の装置はその一例で、負荷用電動モータで第2回転軸に負荷トルクを付与しつつ、駆動用電動モータで第1回転軸を回転駆動してかみあい伝達誤差を測定するようになっており、負荷トルクを付与する負荷用電動モータが起こす回転変動の測定値への影響を排除するために流体継手や慣性体が設けられている。
【0003】
一方、このように流体継手や慣性体が設けられると、その背反として負荷トルクに変動が生じてしまうことから、負荷錘の重力で負荷トルクを付与することが提案されている。特許文献2に記載の装置はその一例で、第1回転軸や第2回転軸に一体的に設けられた回転体に負荷錘を吊り下げて負荷トルクを付与するようになっており、このようにすれば一定の負荷トルクを安定して付与することができる。
【0004】
なお、「かみあい伝達誤差」は、互いに噛み合う一対の歯車等の歯車装置を介して連結された第1回転軸および第2回転軸が、ギヤ比等に応じて相対回転させられる際に、歯面の形状誤差や歯のたわみなどに起因して生じる相互の回転角のずれであり、互いに噛み合う歯が異なれば相違するとともに、負荷トルクによっても変化する。
【特許文献1】特開平6−74868号公報
【特許文献2】特開平7−120353号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、このように負荷錘を吊り下げて負荷トルクを付与する場合には、第1回転軸や第2回転軸の回転に伴って負荷錘が上昇或いは下降するため、歯車装置を何回転もさせてかみあい伝達誤差を連続測定することができないという問題があった。すなわち、例えば歯数が50と53の一対の歯車から成る歯車装置の場合、1回転当たりのかみあい伝達誤差パターンは50×53=2659通りあり、その総てのかみあい伝達誤差パターンを測定するためには2650回転させる必要があるが、負荷錘を付け替えることなく連続して測定するためには装置が極めて大型になり、実質的に不可能である。特に、大きな負荷トルクを付与するためには、負荷錘を吊るす回転体の径寸法を大きくする必要があり、1回転当たりの負荷錘の上下動が一層大きくなって、装置が一層大型になるとともに、連続測定可能な回転数が少なくなる。
【0006】
本発明は以上の事情を背景として為されたもので、その目的とするところは、負荷錘で負荷トルクを付与しつつ歯車装置を回転させてかみあい伝達誤差を測定する場合に、装置をコンパクトに維持しつつ連続測定できる回転数を大幅に増大させることにある。
【課題を解決するための手段】
【0007】
かかる目的を達成するために、第1発明は、互いに噛み合う複数の歯車を有する歯車装置を介して連結された第1回転軸および第2回転軸に所定の負荷トルクを付与した状態で、その第1回転軸を回転駆動して前記歯車装置を噛合い回転させるとともに、第1回転軸および第2回転軸の回転角をそれぞれロータリエンコーダにより検出してその歯車装置のかみあい伝達誤差を測定する装置であって、(a) 前記第1回転軸を回転駆動する駆動用電動モータと、(b) 一対の第1定滑車および第2定滑車と、それ等の第1定滑車および第2定滑車の双方に連結されるとともに何れか一方に所定長さだけ巻き付けられた連結具と、その連結具に相対移動可能に引っ掛けられた動滑車とを有し、その第1定滑車が前記第2回転軸の回転に伴って機械的に回転させられる滑車列と、(c) 前記動滑車に取り付けられ、重力により前記連結具および前記第1定滑車を介して前記第2回転軸に前記負荷トルクを付与する負荷錘と、(d) 前記第2回転軸の回転に伴う前記第1定滑車の回転で、前記連結具がその第1定滑車に巻き取られ或いは第1定滑車から巻き戻されても、前記動滑車の上下動が所定の範囲内に維持されるように、その第1定滑車の回転に同期して前記第2定滑車を回転駆動することによりその連結具をその第2定滑車から巻き戻し或いは第2定滑車に巻き取る同期用電動モータと、を有することを特徴とする。
【0008】
第2発明は、第1発明のかみあい伝達誤差の測定装置において、(a) 前記滑車列は、それぞれ前記第1定滑車、第2定滑車、連結具、および動滑車を有する第1滑車列および第2滑車列を備えており、(b) それ等の第1滑車列および第2滑車列の動滑車にそれぞれ取り付けられる負荷錘により前記第2回転軸には互いに逆回転方向のトルクが作用し、両負荷錘の重量の差に応じた負荷トルクが付与されることを特徴とする。
【0009】
第3発明は、互いに噛み合う複数の歯車を有する歯車装置を介して連結された第1回転軸および第2回転軸に所定の負荷トルクを付与した状態で、その第1回転軸を回転駆動して前記歯車装置を噛合い回転させるとともに、第1回転軸および第2回転軸の回転角をそれぞれロータリエンコーダにより検出してその歯車装置のかみあい伝達誤差を測定する方法であって、(a) 一対の第1定滑車および第2定滑車と、それ等の第1定滑車および第2定滑車の双方に連結されるとともに何れか一方に所定長さだけ巻き付けられた連結具と、その連結具に相対移動可能に引っ掛けられた動滑車とを有し、その第1定滑車が前記第2回転軸の回転に伴って機械的に回転させられる滑車列を備えており、(b) 前記動滑車に負荷錘を取り付け、その負荷錘の重力により前記第2回転軸に前記負荷トルクを付与しつつ、前記第1回転軸を回転駆動して前記歯車装置を噛合い回転させる一方、(c) 前記第2回転軸の回転に伴う前記第1定滑車の回転で、前記連結具がその第1定滑車に巻き取られ或いは第1定滑車から巻き戻されても、前記動滑車の上下動が所定の範囲内に維持されるように、その第1定滑車の回転に同期して前記第2定滑車を回転駆動することによりその連結具をその第2定滑車から巻き戻し或いは第2定滑車に巻き取ることを特徴とする。
【0010】
第4発明は、第3発明のかみあい伝達誤差の測定方法において、(a) 前記滑車列は、それぞれ前記第1定滑車、第2定滑車、連結具、および動滑車を有する第1滑車列および第2滑車列を備えており、(b) それ等の第1滑車列および第2滑車列の動滑車にそれぞれ取り付けられる負荷錘により前記第2回転軸には互いに逆回転方向のトルクが作用し、両負荷錘の重量の差に応じた負荷トルクが付与されることを特徴とする。
【発明の効果】
【0011】
第1発明のかみあい伝達誤差の測定装置においては、第1定滑車、第2定滑車、連結具、および動滑車を有する滑車列が設けられ、その動滑車に取り付けられる負荷錘によって第2回転軸に負荷トルクが付与されるようになっているため、その負荷錘の重量によって定まる一定の負荷トルクを安定して付与することが可能で、駆動用電動モータにより第1回転軸を回転駆動することによりかみあい伝達誤差を高い精度で測定することができる。
【0012】
また、第2回転軸の回転に伴う第1定滑車の回転で連結具がその第1定滑車に巻き取られ或いは第1定滑車から巻き戻されても、動滑車の上下動が所定の範囲内に維持されるように、同期用電動モータにより第1定滑車の回転に同期して第2定滑車を回転駆動するため、動滑車や負荷錘を所定の高さ位置に保持しつつ第1回転軸を何回転もさせてかみあい伝達誤差を連続測定することが可能で、連結具の長さ寸法を適当に設定して第1定滑車或いは第2定滑車に巻き付けておくことにより、例えば歯車装置の総てのかみあい伝達誤差パターンを連続測定することができるとともに、そのような装置をコンパクトに構成できる。
【0013】
ここで、第1回転軸を所定の回転角ずつ間欠回転させながら静止状態でかみあい伝達誤差を間欠的に測定する(これも一種の連続測定)こともできるが、連続回転させながらかみあい伝達誤差を連続測定することも可能である。連続回転させて測定する場合、動滑車や負荷錘の上下動を完全に防止することはできないため、厳密にはそれ等の慣性で負荷トルクが変動するが、例えば1rpm以下、或いは2〜3rpm程度以下の非常にゆっくりした回転速度で回転駆動すれば、動滑車や負荷錘の上下動による慣性の影響が殆ど生じないようにすることができる。
【0014】
また、同期用電動モータにより第2定滑車を回転駆動するようになっているため、マイクロコンピュータ等を有する制御装置により第2定滑車の回転速度を容易に制御することが可能で、例えば駆動用電動モータを動力源として変速機構等を介して第2定滑車を回転駆動する場合に比較して、ギヤ比が異なる種々の歯車装置のかみあい伝達誤差を測定する場合でも、第2定滑車を第1定滑車に対して容易に同期回転させることができる。
【0015】
第2発明では、第1滑車列および第2滑車列を有するとともに、それ等の動滑車にそれぞれ取り付けられる負荷錘の重量の差に応じた負荷トルクが第2回転軸に付与されるようになっているため、その負荷錘を変更するだけで負荷トルクを反対向き(逆回転方向)に付与することが可能で、例えば駆動状態と被駆動状態、或いは正回転駆動と逆回転駆動などのように反対側の歯面が接触する動力伝達によるかみあい伝達誤差を容易に測定することができる。また、このように一対の負荷錘の重量の差に応じた負荷トルクが付与されることから、微小な負荷トルクを高い精度で付与することが可能で、かみあい伝達誤差の測定精度を一層向上させることができるとともに、摺動抵抗等の各部の回転抵抗を相殺するように負荷トルクを付与することにより、実質的に負荷0におけるかみあい伝達誤差を測定することもできる。
【0016】
第3発明、第4発明のかみあい伝達誤差の測定方法においても、実質的に第1発明、第2発明と同様の作用効果が得られる。
【発明を実施するための最良の形態】
【0017】
本発明は、歯の噛み合い状態を解析するものであるため、例えば歯車の1ピッチ分だけ噛合い回転させてかみあい伝達誤差を測定するだけでも良く、必ずしも1回転させる必要はないが、1回転させれば全ての噛合い歯のかみあい伝達誤差を解析することができる。また、互いに噛み合う一対の歯車の歯数が相違する場合には、1回転毎に互いに噛み合う噛合い歯が変化するため、その1回転毎のかみあい伝達誤差パターンが相違し、そのかみあい伝達誤差パターンを総て測定する場合には、例えば一対の歯車の歯数を掛け算した回転数だけ回転させてかみあい伝達誤差を測定すれば良い。
【0018】
総てのかみあい伝達誤差パターンを連続測定する場合には、前記連結具は、その総てのかみあい伝達誤差パターンを測定するのに必要な回転数だけ第1回転軸を回転駆動した場合に、前記第2回転軸の回転に伴う前記第1定滑車の回転を許容する長さ寸法を有して構成され、予め第1定滑車または第2定滑車に巻き付けておけば良い。
【0019】
かみあい伝達誤差を測定する際の第1回転軸および第2回転軸の回転方向は適宜定められ、上記連結具が第2定滑車から巻き戻されて第1定滑車に巻き取られる場合でも、第1定滑車から巻き戻されて第2定滑車に巻き取られる場合でも良い。
【0020】
同期用電動モータは、例えば動滑車が略一定の高さ位置に保持されるように第2定滑車を回転駆動することが望ましいが、装置により許容される所定範囲内で動滑車が上昇または下降させられても良い。
【0021】
同期用電動モータは、第1定滑車の回転に同期して第2定滑車を回転駆動するものであるが、必ずしも第1定滑車の回転を検出して制御する必要はなく、第2回転軸や第1回転軸の回転、或いは駆動用電動モータの駆動信号など、第1定滑車の回転に対して一定の対応関係を有する種々の物理量に基づいて制御することが可能である。
【0022】
この同期用電動モータは、第1定滑車および第2定滑車の径寸法が同じであれば、第2定滑車を第1定滑車と同じ速度で回転させれば良いが、それ等の径寸法が異なる場合には、その径寸法の相違に応じて定められる所定の回転速度で第2定滑車を回転させるように構成される。
【0023】
かみあい伝達誤差を測定すべき歯車装置は、第1回転軸および第2回転軸にそれぞれ取り付けられるとともに互いに噛み合わされた一対の歯車であっても良いが、互いに噛み合う2対以上の歯車や遊星歯車装置、或いは傘歯車式の差動歯車装置等を有するものでも良く、例えば車両用の変速装置など種々の歯車装置のかみあい伝達誤差測定に本発明は適用できる。
【0024】
滑車列の連結具は、第1定滑車および第2定滑車に対して巻回可能な可撓性を有するもので、紐状のワイヤや帯状の金属ベルトなどが好適に用いられる。ベルトを用いる場合には、定滑車に何回転も巻き付けると径寸法が変化するため、その径寸法の変化を考慮して同期用電動モータによる第2定滑車の回転速度制御が行われるようにすることが望ましい。
【0025】
第2発明、第4発明のように一対の第1滑車列および第2滑車列を設ける場合、同期用電動モータもそれ等の滑車列に対応してそれぞれ設けるようにしても良いが、ベルトおよびプーリや複数の噛合い歯車等から成る連動装置を介して両滑車列の第2定滑車を相互に機械的に連結し、単一の同期用電動モータで両滑車列の第2定滑車を回転駆動することもできる。
【0026】
上記第1滑車列および第2滑車列の第1定滑車を同じ径寸法で構成すれば、負荷錘の重量の差がそのまま負荷トルクに対応するが、両滑車列の第1定滑車の径寸法は必ずしも同じである必要はなく、互いに相違していても良い。その場合は、その第1定滑車の径寸法の差および負荷錘の重量の差に応じた負荷トルクが第2回転軸に付与される。
【0027】
第2発明、第4発明では、例えば(a) 第1滑車列および第2滑車列の第1定滑車は同軸上に一体的に設けられ、前記第2回転軸の回転に伴って互いに一体的に回転させられる一方、(b) それ等の第1滑車列および第2滑車列の第2定滑車および動滑車は前記第1定滑車を挟んで互いに反対側に配設され、その動滑車に取り付けられる負荷錘の重量の差に応じた負荷トルクを前記第2回転軸に付与するように構成される。但し、第1滑車列および第2滑車列を、第1定滑車を含めて別々に配設し、連動装置等を介してそれぞれ第2回転軸の回転に伴って第1定滑車が独立に回転させられるようにするとともに、各滑車列の動滑車に取り付けられる負荷錘によって第2回転軸に逆回転方向のトルクが作用させられるようにしても良い。
【0028】
上記のように第1滑車列および第2滑車列の一対の第1定滑車を同軸上に一体的に配設する場合、それ等の第1定滑車を別々に構成して共通の回転軸に一体的に設けるようにしても良いが、共通の単一の第1定滑車を用いることも可能である。
【0029】
駆動用電動モータと第1回転軸との間、或いは滑車列の第2定滑車と同期用電動モータとの間には、それぞれ必要に応じて減速装置を設けることが可能で、それ等の第1回転軸、第2定滑車を減速回転させたり、その減速でトルクが増幅されるため、駆動用電動モータ、同期用電動モータとしてトルクが小さい小型の電動モータを採用したりすることができる。
【0030】
第1発明では、駆動用電動モータおよび同期用電動モータを用いて第1回転軸や第2定滑車を回転駆動するようになっているが、第3発明の実施に際しては、例えば駆動用電動モータを動力源として変速機構等を介して第2定滑車を回転駆動することもできるなど、種々の態様が可能である。
【0031】
本発明は、第2回転軸側に滑車列が配設されて負荷トルクを付与するようになっており、第1回転軸を回転駆動する駆動用電動モータでその負荷トルクを受け止めることもできるが、前記特許文献2のように、第1回転軸側にも滑車列を配設して動滑車に釣合錘を取り付け、第2回転軸側の負荷錘と釣り合わせるようにしても良い。その場合にも、第2回転軸側の滑車列と同様に、動滑車や負荷錘の上下動が所定の範囲内に維持されるように、同期用電動モータで第2定滑車を回転駆動すれば良い。
【実施例】
【0032】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
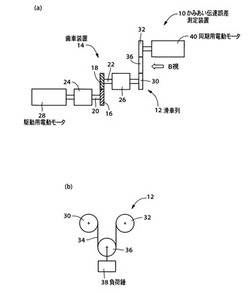
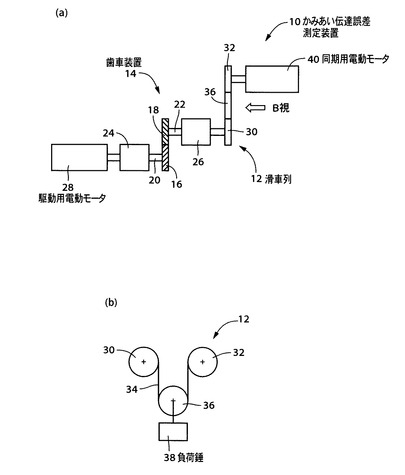
図1は、本発明の一実施例であるかみあい伝達誤差測定装置10を説明する図で、(a) は平面図、(b) は(a) におけるB矢視図に相当する図で滑車列12を示す正面図であり、歯車装置14のかみあい伝達誤差を測定する場合である。歯車装置14は、はすば歯車等の互いに噛み合わされた一対の平行軸歯車16、18を備えており、それ等の平行軸歯車16、18はそれぞれ第1回転軸20、第2回転軸22に一体的に取り付けられている。第1回転軸20と第2回転軸22との軸間距離は、一対の平行軸歯車16、18の中心距離に設定されており、平行軸歯車16、18はそれぞれ第1回転軸20、第2回転軸22に着脱可能に取り付けられるようになっている。また、第1回転軸20および第2回転軸22にはそれぞれロータリエンコーダ24、26が配設され、それ等の回転角を検出するようになっているとともに、第1回転軸20には駆動用電動モータ28が連結され、軸心まわりに回転駆動されるようになっている。
【0033】
前記滑車列12は、一定の高さ位置に配設された一対の第1定滑車30および第2定滑車32と、それ等の第1定滑車30および第2定滑車32の双方に両端部が連結された連結ワイヤ34と、その連結ワイヤ34に相対移動可能に引っ掛けられた上下動可能な動滑車36とを備えており、第1定滑車30は前記第2回転軸22に連結されて一体的に回転させられるようになっている。そして、動滑車36には所定の重量の負荷錘38が吊り下げられ、この負荷錘38の重量に対応する負荷トルクが連結ワイヤ34、第1定滑車30、第2回転軸22を介して歯車装置14に伝達され、一対の平行軸歯車16、18の噛合い部分に付与される。
【0034】
連結ワイヤ34は連結具に相当し、前記歯車装置14のかみあい伝達誤差の測定に必要な回転数だけ前記駆動用電動モータ28によって第1回転軸20が回転駆動された場合に、第2回転軸22と一体的に回転させられる第1定滑車30の回転を許容する長さ寸法を備えている。例えば一対の平行軸歯車16、18の歯数が相違する場合には、1回転毎に互いに噛み合う噛合い歯が変化し、その1回転毎のかみあい伝達誤差パターンが相違するため、その総てのかみあい伝達誤差パターンを測定するためには、それ等の一対の平行軸歯車16、18の歯数を掛け算した回転数だけ第1回転軸20を回転駆動する必要があり、その場合でも第2回転軸22、更には第1定滑車30の回転を許容するように、連結ワイヤ34の長さ寸法は定められる。
【0035】
この連結ワイヤ34は、図1(b) に示すように動滑車36を引っ掛けるのに必要な所定のたるみを有する状態で、予め第1定滑車30または第2定滑車32に巻き付けられる。これは、かみあい伝達誤差を測定する際の第1定滑車30の回転方向に応じて適宜定められ、第1定滑車30が図1(b) において左まわりに回転させられる場合は、予め第2定滑車32に巻き付けておき、測定時にその第2定滑車32から巻き戻されるとともに、第1定滑車30に巻き取られるようにすれば良い。また、第1定滑車30が図1(b) において右まわりに回転させられる場合は、予め第1定滑車30に巻き付けておき、測定時にその第1定滑車30から巻き戻されるとともに、第2定滑車32に巻き取られるようにすれば良い。
【0036】
第2定滑車32には同期用電動モータ40が連結されており、第2回転軸22の回転に伴う第1定滑車30の回転で連結ワイヤ34が第1定滑車30に巻き取られ、或いは第1定滑車30から巻き戻されても、動滑車36や負荷錘38が略一定の高さ位置に保持されるように、その第1定滑車30の回転に同期して第2定滑車32を回転駆動することにより、連結ワイヤ34を第2定滑車32から巻き戻し或いは第2定滑車32に巻き取るようになっている。同期用電動モータ40は、マイクロコンピュータ等を有する図示しない制御装置により、例えば第1定滑車30と一体的に回転させられる第2回転軸22の回転を検出するロータリエンコーダ26の検出値に基づいて、第2定滑車32を第1定滑車30に対して同期回転させるように制御されるが、第1回転軸20を回転駆動する駆動用電動モータ28に対する駆動信号(回転速度に対応する信号)および歯車装置14のギヤ比などに基づいて制御することもできる。本実施例では第1定滑車30および第2定滑車32の径寸法が同じで、第2定滑車32を第1定滑車30と同じ速度で同じ方向へ回転駆動すれば良い。
【0037】
そして、このようなかみあい伝達誤差測定装置10においては、連結ワイヤ34を第1定滑車30または第2定滑車32に巻き付けるとともに、動滑車36に所定の重量の負荷錘38を吊り下げて歯車装置14に所定の負荷トルク(噛合トルク)を付与した状態で、駆動用電動モータ28により第1回転軸20を例えば1rpm以下の非常にゆっくりした回転速度で連続回転させ、ロータリエンコーダ24、26により第1回転軸20および第2回転軸22の回転角をそれぞれ検出することにより、かみあい伝達誤差を測定することができる。駆動用電動モータ28により第1回転軸20を微量ずつ間欠回転させながら、静止状態でロータリエンコーダ24、26により第1回転軸20および第2回転軸22の回転角を検出してかみあい伝達誤差を測定することも可能である。
【0038】
ここで、本実施例では動滑車36に吊り下げた負荷錘38によって負荷トルクが付与されるため、その負荷錘38の重量によって定まる一定の負荷トルクを安定して付与することが可能で、かみあい伝達誤差を高い精度で測定することができる。
【0039】
また、第2回転軸22の回転に伴う第1定滑車30の回転で連結ワイヤ34がその第1定滑車30に巻き取られ或いは第1定滑車30から巻き戻されても、動滑車36や負荷錘38が略一定の高さ位置に保持されるように、同期用電動モータ40により第2定滑車32が第1定滑車30の回転に同期して回転駆動されるため、動滑車36や負荷錘38を略一定の高さ位置に保持しつつ第1回転軸20を何回転もさせてかみあい伝達誤差を連続測定することができる。すなわち、連結ワイヤ34の長さ寸法を適当に設定して第1定滑車30或いは第2定滑車32に巻き付けておくことにより、例えば歯車装置14の総てのかみあい伝達誤差パターンを連続測定することができるのである。
【0040】
その場合に、同期用電動モータ40により第2定滑車32を同期回転させても、動滑車36や負荷錘38が僅かに上下動することは避けられず、第1回転軸20を連続回転させてかみあい伝達誤差を測定する場合には、それ等の上下動によって負荷トルクが変化する恐れがあるが、本実施例では第1回転軸20を1rpm以下の非常にゆっくりした回転速度で回転駆動するため、動滑車36や負荷錘38の上下動による慣性の影響で負荷トルクが変化することを略完全に排除でき、かみあい伝達誤差を高い精度で連続測定することができる。
【0041】
また、第1回転軸20を何回転もさせてかみあい伝達誤差を連続測定する場合でも、動滑車36や負荷錘38が略一定の高さ位置に保持されるため、負荷錘38により一定の負荷トルクを安定して付与できるとともに連続測定が可能なかみあい伝達誤差測定装置10をコンパクトに構成できる。
【0042】
また、同期用電動モータ40により第2定滑車32を回転駆動するようになっているため、例えば駆動用電動モータ28を動力源として変速機構等を介して第2定滑車32を回転駆動する場合に比較して、ギヤ比が異なる種々の歯車装置14のかみあい伝達誤差を測定する場合でも、第2定滑車32を第1定滑車30に対して容易に同期回転させることができる。
【0043】
次に、本発明の他の実施例を説明する。なお、以下の実施例において前記実施例と実質的に共通する部分には同一の符号を付して詳しい説明を省略する。
【0044】
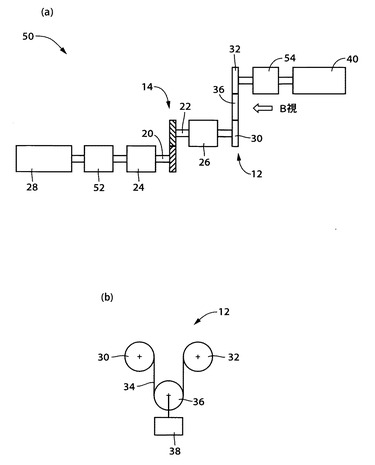
図2のかみあい伝達誤差測定装置50は、第1実施例のかみあい伝達誤差測定装置10に比較して、駆動用電動モータ28および同期用電動モータ40にそれぞれ減速装置52、54が設けられており、それ等の電動モータ28、40を制御精度が高い通常の回転速度範囲内で回転駆動しつつ、第1回転軸20や第2定滑車32を1rpm以下のゆっくりした速度で回転させることができる。また、減速装置52、54によって減速されることによりトルクが増幅されるため、負荷錘38によって大きな負荷トルクを付与する場合でも、駆動用電動モータ28、同期用電動モータ40として小型の電動モータを採用できる。図2の(a) 、(b) は、それぞれ図1の(a) 、(b) に相当する。以下の図3〜図12においても、各図の(a) 、(b) はそれぞれ図1の(a) 、(b) に相当する。
【0045】
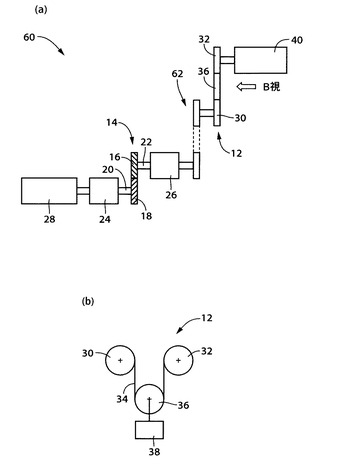
図3のかみあい伝達誤差測定装置60は、第1実施例のかみあい伝達誤差測定装置10に比較して、滑車列12を第2回転軸22の軸心に対して直角な方向へ平行移動させた場合で、ベルトおよびプーリや複数の噛合い歯車等から成る連動装置62を介して第2回転軸22と滑車列12の第1定滑車30とを連結し、第2回転軸22の回転に伴って機械的に第1定滑車30が回転させられるようになっている。このように連動装置62が設けられることにより、滑車列12や第2回転軸22の配設位置の自由度が高くなり、例えば第2回転軸22を第1定滑車30の軸心を中心とする円弧に沿って平行移動可能とすることにより、連動装置62による連結状態を維持したまま第1回転軸20と第2回転軸22との軸間距離を変更することが可能で、平行軸歯車16、18の大きさすなわち中心距離が異なる種々の歯車装置14のかみあい伝達誤差を容易に測定できるようになる。
【0046】
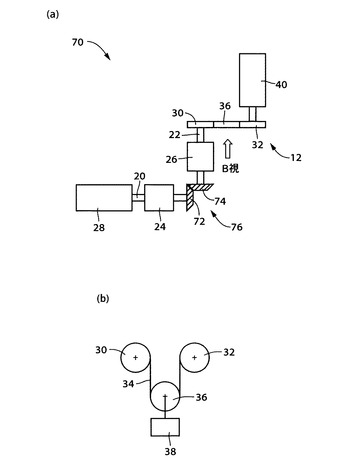
図4のかみあい伝達誤差測定装置70は、傘歯車やハイポイドギヤのように一対の噛合い歯車72、74の軸心が直角に交差したり食い違っていたりする歯車装置76のかみあい伝達誤差を測定するためのもので、それ等の歯車72、74の軸心に応じて第1回転軸20および第2回転軸22が所定の角度で交差或いは食い違うように配設されている。第2回転軸22や滑車列12、同期用電動モータ40を、例えば図4(a) の紙面に対して垂直で且つ第1回転軸20に対して直交する回動中心まわりに回動可能な回転テーブル等に配設すれば、傘歯車等の交差軸歯車に容易に対応できる。また、その回転テーブル上に、更に図4(a) の紙面に対して垂直な上下方向へ移動させられる上下テーブルを設け、その上下テーブルに第2回転軸22等を配設するようにすれば、ハイポイドギヤ等の食い違い軸歯車にも容易に対応できる。
【0047】
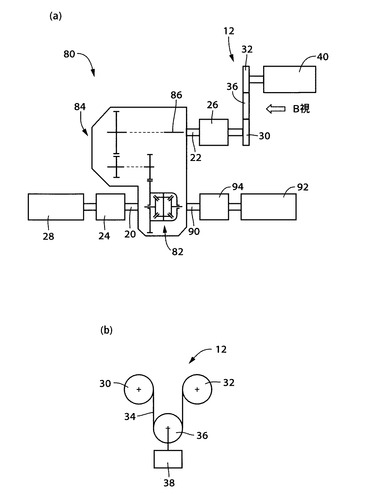
図5のかみあい伝達誤差測定装置80は、差動歯車装置82を含む複数の歯車が噛み合わされた車両用変速装置等の歯車装置84のかみあい伝達誤差を測定するためのもので、前記第2回転軸22は入力軸86に連結される一方、前記第1回転軸20は差動歯車装置82の一方の出力軸(サイドシャフト)に連結される。また、差動歯車装置82の他方の出力軸(サイドシャフト)には第3回転軸90が連結され、駆動用電動モータ92によって軸心まわりに回転駆動されるとともに、ロータリエンコーダ94により回転角が検出されるようになっている。そして、この駆動用電動モータ92は、差動歯車装置82の一対の出力軸を一体回転させるように駆動用電動モータ28と同期して制御され、例えばロータリエンコーダ24、94によって検出される両側の出力軸の回転角の平均値を用いて、ロータリエンコーダ26によって検出される入力軸86の回転角と比較することにより、歯車装置84の全体のかみあい伝達誤差を測定することができる。また、周波数分析等でノイズを除去すれば、ロータリエンコーダ24によって検出される一方の出力軸の回転角とロータリエンコーダ26によって検出される入力軸86の回転角とを比較して、その一方の出力軸と入力軸86との間のかみあい伝達誤差を測定したり、ロータリエンコーダ94によって検出される他方の出力軸の回転角とロータリエンコーダ26によって検出される入力軸86の回転角とを比較して、その他方の出力軸と入力軸86との間のかみあい伝達誤差を測定したりすることも可能である。第3回転軸90は、請求項1および請求項3の第1回転軸に相当する。
【0048】
なお、差動歯車装置82の一対の出力軸が一体的に回転するように、連結装置等を介して機械的に連結すれば、上記第3回転軸90や駆動用電動モータ92、ロータリエンコーダ94を省略することができる。また、このように一対の出力軸を機械的に連結した場合には、その出力軸側に第2回転軸22や滑車列12、同期用電動モータ40等を配設して負荷錘38により負荷トルクを付与する一方、入力軸86側に第1回転軸20や駆動用電動モータ28を配設して回転駆動することにより、かみあい伝達誤差測定を行うこともできる。
【0049】
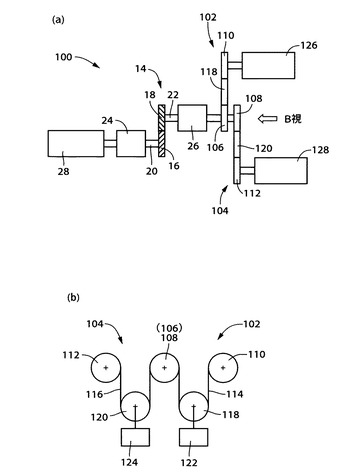
図6のかみあい伝達誤差測定装置100は、第2回転軸22を挟んで互いに反対側に第1滑車例102および第2滑車列104が配設されている場合である。これ等の第1滑車列102および第2滑車列104は、前記滑車列12と同様に構成されており、それぞれ第1定滑車106、108、第2定滑車110、112、連結具としての連結ワイヤ114、116、および動滑車118、120を備えているとともに、第1定滑車106、108は何れも第2回転軸22に取り付けられて互いに一体的に回転させられるようになっている。そして、第1滑車列102の第2定滑車110および動滑車118と、第2滑車列104の第2定滑車112および動滑車120は、第1定滑車106、108を挟んで互いに反対側に配設されており、その動滑車118、120に吊り下げられる負荷錘122、124により第2回転軸22には互いに逆回転方向のトルクが作用させられ、その負荷錘122、124の重量の差に応じた負荷トルクが第2回転軸22に付与される。本実施例では、第1定滑車106および108の径寸法は同じであり、負荷錘122、124の重量の差がそのまま負荷トルクに対応する。
【0050】
また、第2回転軸22の回転に伴って連結ワイヤ114、116の一方は第1定滑車106または108から巻き戻され、他方は第1定滑車106または108に巻き取られるが、その巻き戻しや巻き取りに拘らず動滑車118、120や負荷錘122、124が略一定の高さ位置に保持されるように、その第1定滑車106、108の回転に同期して第2定滑車110、112がそれぞれ同期用電動モータ126、128によって回転駆動され、連結ワイヤ114、116の何れか一方は第2定滑車110または112から巻き戻され、他方は第2定滑車110または112に巻き取られるようになっている。
【0051】
この場合には、両側の負荷錘122、124を変更するだけで負荷トルクを反対向き(逆回転方向)に付与することが可能で、例えば駆動状態と被駆動状態、或いは正回転駆動と逆回転駆動などのように反対側の歯面が接触する動力伝達によるかみあい伝達誤差を容易に測定することができる。また、このように一対の負荷錘122、124の重量の差で負荷トルクを付与することから、微小な負荷トルクを高い精度で付与することが可能で、かみあい伝達誤差の測定精度を一層向上させることができるとともに、摺動抵抗等の各部の回転抵抗を相殺するように負荷トルクを付与することにより、実質的に負荷0におけるかみあい伝達誤差を測定することもできる。すなわち、図6(b) において、第1定滑車106、108が例えば右まわりに回転させられる場合に、その回転抵抗に相当するトルクが右まわりに付与されるように両側の負荷錘122、124の重量を設定すれば、負荷0で歯車装置14を噛合い回転させることができる。
【0052】
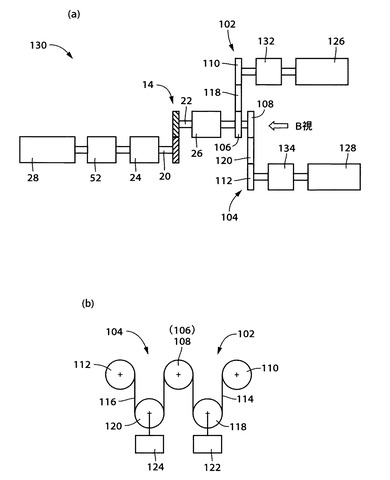
図7のかみあい伝達誤差測定装置130は、図6のかみあい伝達誤差測定装置100に対して前記図2のかみあい伝達誤差測定装置50のように減速装置52、132、134を設けた場合であり、駆動用電動モータ28や同期用電動モータ126、128を制御精度が高い通常の回転速度範囲内で回転駆動しつつ、第1回転軸20や第2定滑車110、112を1rpm以下のゆっくりした速度で回転させることができる。また、減速装置52、132、134によって減速されることによりトルクが増幅されるため、負荷錘122、124によって大きな負荷トルクを付与する場合でも、駆動用電動モータ28、同期用電動モータ126、128として小型の電動モータを採用できる。
【0053】
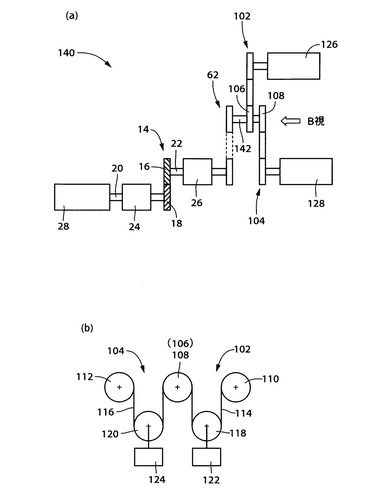
図8のかみあい伝達誤差測定装置140は、図6のかみあい伝達誤差測定装置100において、前記図3のかみあい伝達誤差測定装置60のように第1滑車列102および第2滑車列104を一体的に第2回転軸22の軸心に対して直角な方向へ平行移動させるとともに、連動装置62を介して第2回転軸22と第1定滑車106および108とを機械的に連結した場合である。第1定滑車106および108は、それぞれ別個に構成されているが、共通の回転軸142に取り付けられて互いに一体的に回転させられるようになっている。このように連動装置62が設けられることにより、第1滑車列102、第2滑車列104や第2回転軸22の配設位置の自由度が高くなり、例えば第2回転軸22を回転軸142の軸心を中心とする円弧に沿って平行移動可能とすることにより、連動装置62による連結状態を維持したまま第1回転軸20と第2回転軸22との軸間距離を変更することが可能で、平行軸歯車16、18の大きさすなわち中心距離が異なる種々の歯車装置14のかみあい伝達誤差を容易に測定できるようになる。
【0054】
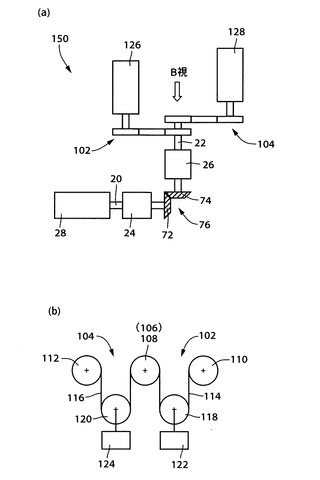
図9のかみあい伝達誤差測定装置150は、図6のかみあい伝達誤差測定装置100において、前記図4のかみあい伝達誤差測定装置70のように一対の噛合い歯車72、74の軸心が直角に交差したり食い違っていたりする歯車装置76のかみあい伝達誤差を測定できるようにした場合である。本実施例においても、第2回転軸22や滑車列102、104、同期用電動モータ126、128を、例えば図9(a) の紙面に対して垂直で且つ第1回転軸20に対して直交する回動中心まわりに回動可能な回転テーブル等に配設すれば、傘歯車等の交差軸歯車に容易に対応できる。また、その回転テーブル上に、更に図9(a) の紙面に対して垂直な上下方向へ移動させられる上下テーブルを設け、その上下テーブルに第2回転軸22等を配設するようにすれば、ハイポイドギヤ等の食い違い軸歯車にも容易に対応できる。
【0055】
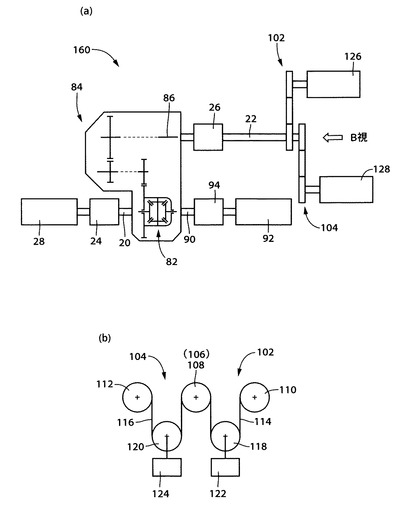
図10のかみあい伝達誤差測定装置160は、図6のかみあい伝達誤差測定装置100において、前記図5のかみあい伝達誤差測定装置80のように差動歯車装置82を含む車両用変速装置等の歯車装置84のかみあい伝達誤差を測定できるようにした場合で、差動歯車装置82の他方の出力軸を回転駆動したり回転角を検出したりするために第3回転軸90、駆動用電動モータ92、およびロータリエンコーダ94が設けられる。
【0056】
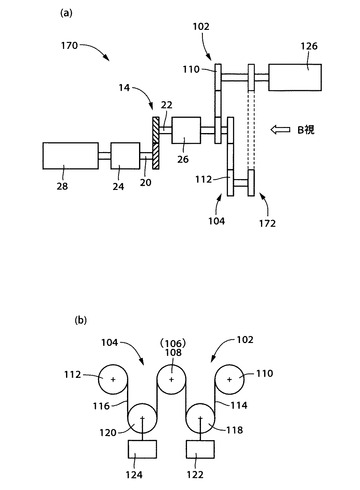
図11のかみあい伝達誤差測定装置170は、図6のかみあい伝達誤差測定装置100において第2滑車列104側の同期用電動モータ128を省略し、ベルトおよびプーリや複数の噛合い歯車等から成る連動装置172を介して両滑車列102、104の第2定滑車110と112とを機械的に連結することにより、単一の同期用電動モータ126によりそれ等の第2定滑車110および112が共に回転駆動されるようになっている。第2定滑車110および112の回転方向は同じで、回転速度は径寸法に応じて定められるが、本実施例では第2定滑車110および112、第1定滑車106および108の径寸法は何れも等しく、回転速度も同じで良い。したがって、連動装置172は、第2定滑車110および112が同じ回転方向へ同じ速度で回転するように設けられれば良い。
【0057】
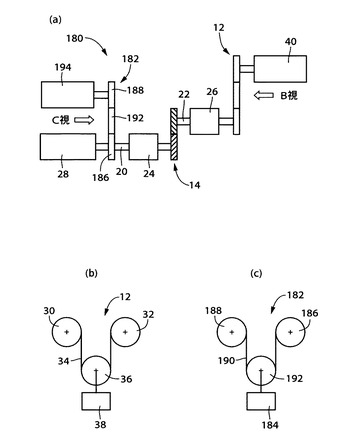
図12のかみあい伝達誤差測定装置180は、第1実施例のかみあい伝達誤差測定装置10において、第1回転軸20側にも滑車列182を配設して釣合錘184を吊り下げ、第2回転軸22側の負荷錘38と釣り合わせるようにしたものである。滑車列182は、前記滑車列12と同様に第1定滑車186、第2定滑車188、連結具としての連結ワイヤ190、および動滑車192を備えており、動滑車192に釣合錘184が吊り下げられるとともに、第1定滑車186は第1回転軸20に取り付けられて一体的に回転させられるようになっている。そして、第1回転軸20の回転に伴って連結ワイヤ190は第1定滑車186から巻き戻され、或いは第1定滑車186に巻き取られるが、その巻き戻しや巻き取りに拘らず動滑車192や釣合錘184が略一定の高さ位置に保持されるように、その第1定滑車186の回転に同期して第2定滑車188が同期用電動モータ194によって回転駆動され、連結ワイヤ190が第2定滑車188から巻き戻され、或いは第2定滑車188に巻き取られるようになっている。図12の(c) は、図12の(a) におけるC矢視図に相当する図で、滑車列182を示す正面図である。
【0058】
この場合には、駆動用電動モータ28に負荷錘38の負荷が殆ど作用しないようにできるため、駆動用電動モータ28は単に第1回転軸20を回転させるだけで良く、大きな負荷トルクを付与してかみあい伝達誤差を測定する場合でも第1回転軸20を一定の回転速度で安定して回転駆動できるとともに、駆動用電動モータ28として小型で安価な電動モータを採用できる。
【0059】
なお、この第1回転軸20側にも、前記図6の第1滑車列102、第2滑車列104のように一対の滑車列を設けて、互いに逆回転方向にトルクが作用する一対の釣合錘を吊り下げるようにすることが可能である。
【0060】
以上、本発明の実施例を図面に基づいて詳細に説明したが、これ等はあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【図面の簡単な説明】
【0061】
【図1】本発明の一実施例であるかみあい伝達誤差測定装置を説明する概略図で、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図2】本発明の他の実施例を説明する図で、各電動モータに減速装置を設けた場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図3】本発明の更に別の実施例を説明する図で、連動装置を介して滑車列を接続した場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図4】本発明の更に別の実施例を説明する図で、交差軸歯車や食い違い軸歯車のかみあい伝達誤差を測定する場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図5】本発明の更に別の実施例を説明する図で、車両用変速機等の差動歯車装置を有する歯車装置のかみあい伝達誤差を測定する場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図6】本発明の更に別の実施例を説明する図で、第2回転軸の両側に滑車列が設けられて負荷錘の差に相当する負荷トルクが付与される場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図7】本発明の更に別の実施例を説明する図で、図6の実施例の各電動モータに減速装置を設けた場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図8】本発明の更に別の実施例を説明する図で、図6の実施例において連動装置を介して滑車列を接続した場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図9】本発明の更に別の実施例を説明する図で、図6の実施例において交差軸歯車や食い違い軸歯車のかみあい伝達誤差を測定する場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図10】本発明の更に別の実施例を説明する図で、図6の実施例において車両用変速機等の差動歯車装置を有する歯車装置のかみあい伝達誤差を測定する場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図11】本発明の更に別の実施例を説明する図で、図6の実施例において両滑車列の第2定滑車を連動装置で機械的に連結した場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図12】本発明の更に別の実施例を説明する図で、図1の実施例において第1回転軸側にも滑車列を設けて釣合錘により第2回転軸側の負荷錘と釣り合わせるようにした場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図、(c) は(a) におけるC矢視図に相当する滑車列の正面図である。
【符号の説明】
【0062】
10、50、60、70、80、100、130、140、150、160、170、180:かみあい伝達誤差測定装置 12:滑車列 14、76、84:歯車装置 20:第1回転軸 22:第2回転軸 24、26、94:ロータリエンコーダ 28、92:駆動用電動モータ 30、106、108:第1定滑車 32、110、112:第2定滑車 34、114、116:連結ワイヤ(連結具) 36、118、120:動滑車 38、122、124:負荷錘 40、126、128:同期用電動モータ 90:第3回転軸(第1回転軸) 102:第1滑車列 104:第2滑車列
【技術分野】
【0001】
本発明はかみあい伝達誤差の測定装置および測定方法に係り、特に、負荷錘で負荷トルクを付与する場合に装置をコンパクトに維持しつつかみあい伝達誤差を連続測定できる回転数を大幅に増大させる技術に関するものである。
【背景技術】
【0002】
互いに噛み合う複数の歯車を有する歯車装置を介して連結された第1回転軸および第2回転軸に所定の負荷トルクを付与した状態で、その第1回転軸を回転駆動して前記歯車装置を噛合い回転させるとともに、第1回転軸および第2回転軸の回転角をそれぞれロータリエンコーダにより検出して歯車装置のかみあい伝達誤差を測定する装置が知られている。特許文献1に記載の装置はその一例で、負荷用電動モータで第2回転軸に負荷トルクを付与しつつ、駆動用電動モータで第1回転軸を回転駆動してかみあい伝達誤差を測定するようになっており、負荷トルクを付与する負荷用電動モータが起こす回転変動の測定値への影響を排除するために流体継手や慣性体が設けられている。
【0003】
一方、このように流体継手や慣性体が設けられると、その背反として負荷トルクに変動が生じてしまうことから、負荷錘の重力で負荷トルクを付与することが提案されている。特許文献2に記載の装置はその一例で、第1回転軸や第2回転軸に一体的に設けられた回転体に負荷錘を吊り下げて負荷トルクを付与するようになっており、このようにすれば一定の負荷トルクを安定して付与することができる。
【0004】
なお、「かみあい伝達誤差」は、互いに噛み合う一対の歯車等の歯車装置を介して連結された第1回転軸および第2回転軸が、ギヤ比等に応じて相対回転させられる際に、歯面の形状誤差や歯のたわみなどに起因して生じる相互の回転角のずれであり、互いに噛み合う歯が異なれば相違するとともに、負荷トルクによっても変化する。
【特許文献1】特開平6−74868号公報
【特許文献2】特開平7−120353号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、このように負荷錘を吊り下げて負荷トルクを付与する場合には、第1回転軸や第2回転軸の回転に伴って負荷錘が上昇或いは下降するため、歯車装置を何回転もさせてかみあい伝達誤差を連続測定することができないという問題があった。すなわち、例えば歯数が50と53の一対の歯車から成る歯車装置の場合、1回転当たりのかみあい伝達誤差パターンは50×53=2659通りあり、その総てのかみあい伝達誤差パターンを測定するためには2650回転させる必要があるが、負荷錘を付け替えることなく連続して測定するためには装置が極めて大型になり、実質的に不可能である。特に、大きな負荷トルクを付与するためには、負荷錘を吊るす回転体の径寸法を大きくする必要があり、1回転当たりの負荷錘の上下動が一層大きくなって、装置が一層大型になるとともに、連続測定可能な回転数が少なくなる。
【0006】
本発明は以上の事情を背景として為されたもので、その目的とするところは、負荷錘で負荷トルクを付与しつつ歯車装置を回転させてかみあい伝達誤差を測定する場合に、装置をコンパクトに維持しつつ連続測定できる回転数を大幅に増大させることにある。
【課題を解決するための手段】
【0007】
かかる目的を達成するために、第1発明は、互いに噛み合う複数の歯車を有する歯車装置を介して連結された第1回転軸および第2回転軸に所定の負荷トルクを付与した状態で、その第1回転軸を回転駆動して前記歯車装置を噛合い回転させるとともに、第1回転軸および第2回転軸の回転角をそれぞれロータリエンコーダにより検出してその歯車装置のかみあい伝達誤差を測定する装置であって、(a) 前記第1回転軸を回転駆動する駆動用電動モータと、(b) 一対の第1定滑車および第2定滑車と、それ等の第1定滑車および第2定滑車の双方に連結されるとともに何れか一方に所定長さだけ巻き付けられた連結具と、その連結具に相対移動可能に引っ掛けられた動滑車とを有し、その第1定滑車が前記第2回転軸の回転に伴って機械的に回転させられる滑車列と、(c) 前記動滑車に取り付けられ、重力により前記連結具および前記第1定滑車を介して前記第2回転軸に前記負荷トルクを付与する負荷錘と、(d) 前記第2回転軸の回転に伴う前記第1定滑車の回転で、前記連結具がその第1定滑車に巻き取られ或いは第1定滑車から巻き戻されても、前記動滑車の上下動が所定の範囲内に維持されるように、その第1定滑車の回転に同期して前記第2定滑車を回転駆動することによりその連結具をその第2定滑車から巻き戻し或いは第2定滑車に巻き取る同期用電動モータと、を有することを特徴とする。
【0008】
第2発明は、第1発明のかみあい伝達誤差の測定装置において、(a) 前記滑車列は、それぞれ前記第1定滑車、第2定滑車、連結具、および動滑車を有する第1滑車列および第2滑車列を備えており、(b) それ等の第1滑車列および第2滑車列の動滑車にそれぞれ取り付けられる負荷錘により前記第2回転軸には互いに逆回転方向のトルクが作用し、両負荷錘の重量の差に応じた負荷トルクが付与されることを特徴とする。
【0009】
第3発明は、互いに噛み合う複数の歯車を有する歯車装置を介して連結された第1回転軸および第2回転軸に所定の負荷トルクを付与した状態で、その第1回転軸を回転駆動して前記歯車装置を噛合い回転させるとともに、第1回転軸および第2回転軸の回転角をそれぞれロータリエンコーダにより検出してその歯車装置のかみあい伝達誤差を測定する方法であって、(a) 一対の第1定滑車および第2定滑車と、それ等の第1定滑車および第2定滑車の双方に連結されるとともに何れか一方に所定長さだけ巻き付けられた連結具と、その連結具に相対移動可能に引っ掛けられた動滑車とを有し、その第1定滑車が前記第2回転軸の回転に伴って機械的に回転させられる滑車列を備えており、(b) 前記動滑車に負荷錘を取り付け、その負荷錘の重力により前記第2回転軸に前記負荷トルクを付与しつつ、前記第1回転軸を回転駆動して前記歯車装置を噛合い回転させる一方、(c) 前記第2回転軸の回転に伴う前記第1定滑車の回転で、前記連結具がその第1定滑車に巻き取られ或いは第1定滑車から巻き戻されても、前記動滑車の上下動が所定の範囲内に維持されるように、その第1定滑車の回転に同期して前記第2定滑車を回転駆動することによりその連結具をその第2定滑車から巻き戻し或いは第2定滑車に巻き取ることを特徴とする。
【0010】
第4発明は、第3発明のかみあい伝達誤差の測定方法において、(a) 前記滑車列は、それぞれ前記第1定滑車、第2定滑車、連結具、および動滑車を有する第1滑車列および第2滑車列を備えており、(b) それ等の第1滑車列および第2滑車列の動滑車にそれぞれ取り付けられる負荷錘により前記第2回転軸には互いに逆回転方向のトルクが作用し、両負荷錘の重量の差に応じた負荷トルクが付与されることを特徴とする。
【発明の効果】
【0011】
第1発明のかみあい伝達誤差の測定装置においては、第1定滑車、第2定滑車、連結具、および動滑車を有する滑車列が設けられ、その動滑車に取り付けられる負荷錘によって第2回転軸に負荷トルクが付与されるようになっているため、その負荷錘の重量によって定まる一定の負荷トルクを安定して付与することが可能で、駆動用電動モータにより第1回転軸を回転駆動することによりかみあい伝達誤差を高い精度で測定することができる。
【0012】
また、第2回転軸の回転に伴う第1定滑車の回転で連結具がその第1定滑車に巻き取られ或いは第1定滑車から巻き戻されても、動滑車の上下動が所定の範囲内に維持されるように、同期用電動モータにより第1定滑車の回転に同期して第2定滑車を回転駆動するため、動滑車や負荷錘を所定の高さ位置に保持しつつ第1回転軸を何回転もさせてかみあい伝達誤差を連続測定することが可能で、連結具の長さ寸法を適当に設定して第1定滑車或いは第2定滑車に巻き付けておくことにより、例えば歯車装置の総てのかみあい伝達誤差パターンを連続測定することができるとともに、そのような装置をコンパクトに構成できる。
【0013】
ここで、第1回転軸を所定の回転角ずつ間欠回転させながら静止状態でかみあい伝達誤差を間欠的に測定する(これも一種の連続測定)こともできるが、連続回転させながらかみあい伝達誤差を連続測定することも可能である。連続回転させて測定する場合、動滑車や負荷錘の上下動を完全に防止することはできないため、厳密にはそれ等の慣性で負荷トルクが変動するが、例えば1rpm以下、或いは2〜3rpm程度以下の非常にゆっくりした回転速度で回転駆動すれば、動滑車や負荷錘の上下動による慣性の影響が殆ど生じないようにすることができる。
【0014】
また、同期用電動モータにより第2定滑車を回転駆動するようになっているため、マイクロコンピュータ等を有する制御装置により第2定滑車の回転速度を容易に制御することが可能で、例えば駆動用電動モータを動力源として変速機構等を介して第2定滑車を回転駆動する場合に比較して、ギヤ比が異なる種々の歯車装置のかみあい伝達誤差を測定する場合でも、第2定滑車を第1定滑車に対して容易に同期回転させることができる。
【0015】
第2発明では、第1滑車列および第2滑車列を有するとともに、それ等の動滑車にそれぞれ取り付けられる負荷錘の重量の差に応じた負荷トルクが第2回転軸に付与されるようになっているため、その負荷錘を変更するだけで負荷トルクを反対向き(逆回転方向)に付与することが可能で、例えば駆動状態と被駆動状態、或いは正回転駆動と逆回転駆動などのように反対側の歯面が接触する動力伝達によるかみあい伝達誤差を容易に測定することができる。また、このように一対の負荷錘の重量の差に応じた負荷トルクが付与されることから、微小な負荷トルクを高い精度で付与することが可能で、かみあい伝達誤差の測定精度を一層向上させることができるとともに、摺動抵抗等の各部の回転抵抗を相殺するように負荷トルクを付与することにより、実質的に負荷0におけるかみあい伝達誤差を測定することもできる。
【0016】
第3発明、第4発明のかみあい伝達誤差の測定方法においても、実質的に第1発明、第2発明と同様の作用効果が得られる。
【発明を実施するための最良の形態】
【0017】
本発明は、歯の噛み合い状態を解析するものであるため、例えば歯車の1ピッチ分だけ噛合い回転させてかみあい伝達誤差を測定するだけでも良く、必ずしも1回転させる必要はないが、1回転させれば全ての噛合い歯のかみあい伝達誤差を解析することができる。また、互いに噛み合う一対の歯車の歯数が相違する場合には、1回転毎に互いに噛み合う噛合い歯が変化するため、その1回転毎のかみあい伝達誤差パターンが相違し、そのかみあい伝達誤差パターンを総て測定する場合には、例えば一対の歯車の歯数を掛け算した回転数だけ回転させてかみあい伝達誤差を測定すれば良い。
【0018】
総てのかみあい伝達誤差パターンを連続測定する場合には、前記連結具は、その総てのかみあい伝達誤差パターンを測定するのに必要な回転数だけ第1回転軸を回転駆動した場合に、前記第2回転軸の回転に伴う前記第1定滑車の回転を許容する長さ寸法を有して構成され、予め第1定滑車または第2定滑車に巻き付けておけば良い。
【0019】
かみあい伝達誤差を測定する際の第1回転軸および第2回転軸の回転方向は適宜定められ、上記連結具が第2定滑車から巻き戻されて第1定滑車に巻き取られる場合でも、第1定滑車から巻き戻されて第2定滑車に巻き取られる場合でも良い。
【0020】
同期用電動モータは、例えば動滑車が略一定の高さ位置に保持されるように第2定滑車を回転駆動することが望ましいが、装置により許容される所定範囲内で動滑車が上昇または下降させられても良い。
【0021】
同期用電動モータは、第1定滑車の回転に同期して第2定滑車を回転駆動するものであるが、必ずしも第1定滑車の回転を検出して制御する必要はなく、第2回転軸や第1回転軸の回転、或いは駆動用電動モータの駆動信号など、第1定滑車の回転に対して一定の対応関係を有する種々の物理量に基づいて制御することが可能である。
【0022】
この同期用電動モータは、第1定滑車および第2定滑車の径寸法が同じであれば、第2定滑車を第1定滑車と同じ速度で回転させれば良いが、それ等の径寸法が異なる場合には、その径寸法の相違に応じて定められる所定の回転速度で第2定滑車を回転させるように構成される。
【0023】
かみあい伝達誤差を測定すべき歯車装置は、第1回転軸および第2回転軸にそれぞれ取り付けられるとともに互いに噛み合わされた一対の歯車であっても良いが、互いに噛み合う2対以上の歯車や遊星歯車装置、或いは傘歯車式の差動歯車装置等を有するものでも良く、例えば車両用の変速装置など種々の歯車装置のかみあい伝達誤差測定に本発明は適用できる。
【0024】
滑車列の連結具は、第1定滑車および第2定滑車に対して巻回可能な可撓性を有するもので、紐状のワイヤや帯状の金属ベルトなどが好適に用いられる。ベルトを用いる場合には、定滑車に何回転も巻き付けると径寸法が変化するため、その径寸法の変化を考慮して同期用電動モータによる第2定滑車の回転速度制御が行われるようにすることが望ましい。
【0025】
第2発明、第4発明のように一対の第1滑車列および第2滑車列を設ける場合、同期用電動モータもそれ等の滑車列に対応してそれぞれ設けるようにしても良いが、ベルトおよびプーリや複数の噛合い歯車等から成る連動装置を介して両滑車列の第2定滑車を相互に機械的に連結し、単一の同期用電動モータで両滑車列の第2定滑車を回転駆動することもできる。
【0026】
上記第1滑車列および第2滑車列の第1定滑車を同じ径寸法で構成すれば、負荷錘の重量の差がそのまま負荷トルクに対応するが、両滑車列の第1定滑車の径寸法は必ずしも同じである必要はなく、互いに相違していても良い。その場合は、その第1定滑車の径寸法の差および負荷錘の重量の差に応じた負荷トルクが第2回転軸に付与される。
【0027】
第2発明、第4発明では、例えば(a) 第1滑車列および第2滑車列の第1定滑車は同軸上に一体的に設けられ、前記第2回転軸の回転に伴って互いに一体的に回転させられる一方、(b) それ等の第1滑車列および第2滑車列の第2定滑車および動滑車は前記第1定滑車を挟んで互いに反対側に配設され、その動滑車に取り付けられる負荷錘の重量の差に応じた負荷トルクを前記第2回転軸に付与するように構成される。但し、第1滑車列および第2滑車列を、第1定滑車を含めて別々に配設し、連動装置等を介してそれぞれ第2回転軸の回転に伴って第1定滑車が独立に回転させられるようにするとともに、各滑車列の動滑車に取り付けられる負荷錘によって第2回転軸に逆回転方向のトルクが作用させられるようにしても良い。
【0028】
上記のように第1滑車列および第2滑車列の一対の第1定滑車を同軸上に一体的に配設する場合、それ等の第1定滑車を別々に構成して共通の回転軸に一体的に設けるようにしても良いが、共通の単一の第1定滑車を用いることも可能である。
【0029】
駆動用電動モータと第1回転軸との間、或いは滑車列の第2定滑車と同期用電動モータとの間には、それぞれ必要に応じて減速装置を設けることが可能で、それ等の第1回転軸、第2定滑車を減速回転させたり、その減速でトルクが増幅されるため、駆動用電動モータ、同期用電動モータとしてトルクが小さい小型の電動モータを採用したりすることができる。
【0030】
第1発明では、駆動用電動モータおよび同期用電動モータを用いて第1回転軸や第2定滑車を回転駆動するようになっているが、第3発明の実施に際しては、例えば駆動用電動モータを動力源として変速機構等を介して第2定滑車を回転駆動することもできるなど、種々の態様が可能である。
【0031】
本発明は、第2回転軸側に滑車列が配設されて負荷トルクを付与するようになっており、第1回転軸を回転駆動する駆動用電動モータでその負荷トルクを受け止めることもできるが、前記特許文献2のように、第1回転軸側にも滑車列を配設して動滑車に釣合錘を取り付け、第2回転軸側の負荷錘と釣り合わせるようにしても良い。その場合にも、第2回転軸側の滑車列と同様に、動滑車や負荷錘の上下動が所定の範囲内に維持されるように、同期用電動モータで第2定滑車を回転駆動すれば良い。
【実施例】
【0032】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
図1は、本発明の一実施例であるかみあい伝達誤差測定装置10を説明する図で、(a) は平面図、(b) は(a) におけるB矢視図に相当する図で滑車列12を示す正面図であり、歯車装置14のかみあい伝達誤差を測定する場合である。歯車装置14は、はすば歯車等の互いに噛み合わされた一対の平行軸歯車16、18を備えており、それ等の平行軸歯車16、18はそれぞれ第1回転軸20、第2回転軸22に一体的に取り付けられている。第1回転軸20と第2回転軸22との軸間距離は、一対の平行軸歯車16、18の中心距離に設定されており、平行軸歯車16、18はそれぞれ第1回転軸20、第2回転軸22に着脱可能に取り付けられるようになっている。また、第1回転軸20および第2回転軸22にはそれぞれロータリエンコーダ24、26が配設され、それ等の回転角を検出するようになっているとともに、第1回転軸20には駆動用電動モータ28が連結され、軸心まわりに回転駆動されるようになっている。
【0033】
前記滑車列12は、一定の高さ位置に配設された一対の第1定滑車30および第2定滑車32と、それ等の第1定滑車30および第2定滑車32の双方に両端部が連結された連結ワイヤ34と、その連結ワイヤ34に相対移動可能に引っ掛けられた上下動可能な動滑車36とを備えており、第1定滑車30は前記第2回転軸22に連結されて一体的に回転させられるようになっている。そして、動滑車36には所定の重量の負荷錘38が吊り下げられ、この負荷錘38の重量に対応する負荷トルクが連結ワイヤ34、第1定滑車30、第2回転軸22を介して歯車装置14に伝達され、一対の平行軸歯車16、18の噛合い部分に付与される。
【0034】
連結ワイヤ34は連結具に相当し、前記歯車装置14のかみあい伝達誤差の測定に必要な回転数だけ前記駆動用電動モータ28によって第1回転軸20が回転駆動された場合に、第2回転軸22と一体的に回転させられる第1定滑車30の回転を許容する長さ寸法を備えている。例えば一対の平行軸歯車16、18の歯数が相違する場合には、1回転毎に互いに噛み合う噛合い歯が変化し、その1回転毎のかみあい伝達誤差パターンが相違するため、その総てのかみあい伝達誤差パターンを測定するためには、それ等の一対の平行軸歯車16、18の歯数を掛け算した回転数だけ第1回転軸20を回転駆動する必要があり、その場合でも第2回転軸22、更には第1定滑車30の回転を許容するように、連結ワイヤ34の長さ寸法は定められる。
【0035】
この連結ワイヤ34は、図1(b) に示すように動滑車36を引っ掛けるのに必要な所定のたるみを有する状態で、予め第1定滑車30または第2定滑車32に巻き付けられる。これは、かみあい伝達誤差を測定する際の第1定滑車30の回転方向に応じて適宜定められ、第1定滑車30が図1(b) において左まわりに回転させられる場合は、予め第2定滑車32に巻き付けておき、測定時にその第2定滑車32から巻き戻されるとともに、第1定滑車30に巻き取られるようにすれば良い。また、第1定滑車30が図1(b) において右まわりに回転させられる場合は、予め第1定滑車30に巻き付けておき、測定時にその第1定滑車30から巻き戻されるとともに、第2定滑車32に巻き取られるようにすれば良い。
【0036】
第2定滑車32には同期用電動モータ40が連結されており、第2回転軸22の回転に伴う第1定滑車30の回転で連結ワイヤ34が第1定滑車30に巻き取られ、或いは第1定滑車30から巻き戻されても、動滑車36や負荷錘38が略一定の高さ位置に保持されるように、その第1定滑車30の回転に同期して第2定滑車32を回転駆動することにより、連結ワイヤ34を第2定滑車32から巻き戻し或いは第2定滑車32に巻き取るようになっている。同期用電動モータ40は、マイクロコンピュータ等を有する図示しない制御装置により、例えば第1定滑車30と一体的に回転させられる第2回転軸22の回転を検出するロータリエンコーダ26の検出値に基づいて、第2定滑車32を第1定滑車30に対して同期回転させるように制御されるが、第1回転軸20を回転駆動する駆動用電動モータ28に対する駆動信号(回転速度に対応する信号)および歯車装置14のギヤ比などに基づいて制御することもできる。本実施例では第1定滑車30および第2定滑車32の径寸法が同じで、第2定滑車32を第1定滑車30と同じ速度で同じ方向へ回転駆動すれば良い。
【0037】
そして、このようなかみあい伝達誤差測定装置10においては、連結ワイヤ34を第1定滑車30または第2定滑車32に巻き付けるとともに、動滑車36に所定の重量の負荷錘38を吊り下げて歯車装置14に所定の負荷トルク(噛合トルク)を付与した状態で、駆動用電動モータ28により第1回転軸20を例えば1rpm以下の非常にゆっくりした回転速度で連続回転させ、ロータリエンコーダ24、26により第1回転軸20および第2回転軸22の回転角をそれぞれ検出することにより、かみあい伝達誤差を測定することができる。駆動用電動モータ28により第1回転軸20を微量ずつ間欠回転させながら、静止状態でロータリエンコーダ24、26により第1回転軸20および第2回転軸22の回転角を検出してかみあい伝達誤差を測定することも可能である。
【0038】
ここで、本実施例では動滑車36に吊り下げた負荷錘38によって負荷トルクが付与されるため、その負荷錘38の重量によって定まる一定の負荷トルクを安定して付与することが可能で、かみあい伝達誤差を高い精度で測定することができる。
【0039】
また、第2回転軸22の回転に伴う第1定滑車30の回転で連結ワイヤ34がその第1定滑車30に巻き取られ或いは第1定滑車30から巻き戻されても、動滑車36や負荷錘38が略一定の高さ位置に保持されるように、同期用電動モータ40により第2定滑車32が第1定滑車30の回転に同期して回転駆動されるため、動滑車36や負荷錘38を略一定の高さ位置に保持しつつ第1回転軸20を何回転もさせてかみあい伝達誤差を連続測定することができる。すなわち、連結ワイヤ34の長さ寸法を適当に設定して第1定滑車30或いは第2定滑車32に巻き付けておくことにより、例えば歯車装置14の総てのかみあい伝達誤差パターンを連続測定することができるのである。
【0040】
その場合に、同期用電動モータ40により第2定滑車32を同期回転させても、動滑車36や負荷錘38が僅かに上下動することは避けられず、第1回転軸20を連続回転させてかみあい伝達誤差を測定する場合には、それ等の上下動によって負荷トルクが変化する恐れがあるが、本実施例では第1回転軸20を1rpm以下の非常にゆっくりした回転速度で回転駆動するため、動滑車36や負荷錘38の上下動による慣性の影響で負荷トルクが変化することを略完全に排除でき、かみあい伝達誤差を高い精度で連続測定することができる。
【0041】
また、第1回転軸20を何回転もさせてかみあい伝達誤差を連続測定する場合でも、動滑車36や負荷錘38が略一定の高さ位置に保持されるため、負荷錘38により一定の負荷トルクを安定して付与できるとともに連続測定が可能なかみあい伝達誤差測定装置10をコンパクトに構成できる。
【0042】
また、同期用電動モータ40により第2定滑車32を回転駆動するようになっているため、例えば駆動用電動モータ28を動力源として変速機構等を介して第2定滑車32を回転駆動する場合に比較して、ギヤ比が異なる種々の歯車装置14のかみあい伝達誤差を測定する場合でも、第2定滑車32を第1定滑車30に対して容易に同期回転させることができる。
【0043】
次に、本発明の他の実施例を説明する。なお、以下の実施例において前記実施例と実質的に共通する部分には同一の符号を付して詳しい説明を省略する。
【0044】
図2のかみあい伝達誤差測定装置50は、第1実施例のかみあい伝達誤差測定装置10に比較して、駆動用電動モータ28および同期用電動モータ40にそれぞれ減速装置52、54が設けられており、それ等の電動モータ28、40を制御精度が高い通常の回転速度範囲内で回転駆動しつつ、第1回転軸20や第2定滑車32を1rpm以下のゆっくりした速度で回転させることができる。また、減速装置52、54によって減速されることによりトルクが増幅されるため、負荷錘38によって大きな負荷トルクを付与する場合でも、駆動用電動モータ28、同期用電動モータ40として小型の電動モータを採用できる。図2の(a) 、(b) は、それぞれ図1の(a) 、(b) に相当する。以下の図3〜図12においても、各図の(a) 、(b) はそれぞれ図1の(a) 、(b) に相当する。
【0045】
図3のかみあい伝達誤差測定装置60は、第1実施例のかみあい伝達誤差測定装置10に比較して、滑車列12を第2回転軸22の軸心に対して直角な方向へ平行移動させた場合で、ベルトおよびプーリや複数の噛合い歯車等から成る連動装置62を介して第2回転軸22と滑車列12の第1定滑車30とを連結し、第2回転軸22の回転に伴って機械的に第1定滑車30が回転させられるようになっている。このように連動装置62が設けられることにより、滑車列12や第2回転軸22の配設位置の自由度が高くなり、例えば第2回転軸22を第1定滑車30の軸心を中心とする円弧に沿って平行移動可能とすることにより、連動装置62による連結状態を維持したまま第1回転軸20と第2回転軸22との軸間距離を変更することが可能で、平行軸歯車16、18の大きさすなわち中心距離が異なる種々の歯車装置14のかみあい伝達誤差を容易に測定できるようになる。
【0046】
図4のかみあい伝達誤差測定装置70は、傘歯車やハイポイドギヤのように一対の噛合い歯車72、74の軸心が直角に交差したり食い違っていたりする歯車装置76のかみあい伝達誤差を測定するためのもので、それ等の歯車72、74の軸心に応じて第1回転軸20および第2回転軸22が所定の角度で交差或いは食い違うように配設されている。第2回転軸22や滑車列12、同期用電動モータ40を、例えば図4(a) の紙面に対して垂直で且つ第1回転軸20に対して直交する回動中心まわりに回動可能な回転テーブル等に配設すれば、傘歯車等の交差軸歯車に容易に対応できる。また、その回転テーブル上に、更に図4(a) の紙面に対して垂直な上下方向へ移動させられる上下テーブルを設け、その上下テーブルに第2回転軸22等を配設するようにすれば、ハイポイドギヤ等の食い違い軸歯車にも容易に対応できる。
【0047】
図5のかみあい伝達誤差測定装置80は、差動歯車装置82を含む複数の歯車が噛み合わされた車両用変速装置等の歯車装置84のかみあい伝達誤差を測定するためのもので、前記第2回転軸22は入力軸86に連結される一方、前記第1回転軸20は差動歯車装置82の一方の出力軸(サイドシャフト)に連結される。また、差動歯車装置82の他方の出力軸(サイドシャフト)には第3回転軸90が連結され、駆動用電動モータ92によって軸心まわりに回転駆動されるとともに、ロータリエンコーダ94により回転角が検出されるようになっている。そして、この駆動用電動モータ92は、差動歯車装置82の一対の出力軸を一体回転させるように駆動用電動モータ28と同期して制御され、例えばロータリエンコーダ24、94によって検出される両側の出力軸の回転角の平均値を用いて、ロータリエンコーダ26によって検出される入力軸86の回転角と比較することにより、歯車装置84の全体のかみあい伝達誤差を測定することができる。また、周波数分析等でノイズを除去すれば、ロータリエンコーダ24によって検出される一方の出力軸の回転角とロータリエンコーダ26によって検出される入力軸86の回転角とを比較して、その一方の出力軸と入力軸86との間のかみあい伝達誤差を測定したり、ロータリエンコーダ94によって検出される他方の出力軸の回転角とロータリエンコーダ26によって検出される入力軸86の回転角とを比較して、その他方の出力軸と入力軸86との間のかみあい伝達誤差を測定したりすることも可能である。第3回転軸90は、請求項1および請求項3の第1回転軸に相当する。
【0048】
なお、差動歯車装置82の一対の出力軸が一体的に回転するように、連結装置等を介して機械的に連結すれば、上記第3回転軸90や駆動用電動モータ92、ロータリエンコーダ94を省略することができる。また、このように一対の出力軸を機械的に連結した場合には、その出力軸側に第2回転軸22や滑車列12、同期用電動モータ40等を配設して負荷錘38により負荷トルクを付与する一方、入力軸86側に第1回転軸20や駆動用電動モータ28を配設して回転駆動することにより、かみあい伝達誤差測定を行うこともできる。
【0049】
図6のかみあい伝達誤差測定装置100は、第2回転軸22を挟んで互いに反対側に第1滑車例102および第2滑車列104が配設されている場合である。これ等の第1滑車列102および第2滑車列104は、前記滑車列12と同様に構成されており、それぞれ第1定滑車106、108、第2定滑車110、112、連結具としての連結ワイヤ114、116、および動滑車118、120を備えているとともに、第1定滑車106、108は何れも第2回転軸22に取り付けられて互いに一体的に回転させられるようになっている。そして、第1滑車列102の第2定滑車110および動滑車118と、第2滑車列104の第2定滑車112および動滑車120は、第1定滑車106、108を挟んで互いに反対側に配設されており、その動滑車118、120に吊り下げられる負荷錘122、124により第2回転軸22には互いに逆回転方向のトルクが作用させられ、その負荷錘122、124の重量の差に応じた負荷トルクが第2回転軸22に付与される。本実施例では、第1定滑車106および108の径寸法は同じであり、負荷錘122、124の重量の差がそのまま負荷トルクに対応する。
【0050】
また、第2回転軸22の回転に伴って連結ワイヤ114、116の一方は第1定滑車106または108から巻き戻され、他方は第1定滑車106または108に巻き取られるが、その巻き戻しや巻き取りに拘らず動滑車118、120や負荷錘122、124が略一定の高さ位置に保持されるように、その第1定滑車106、108の回転に同期して第2定滑車110、112がそれぞれ同期用電動モータ126、128によって回転駆動され、連結ワイヤ114、116の何れか一方は第2定滑車110または112から巻き戻され、他方は第2定滑車110または112に巻き取られるようになっている。
【0051】
この場合には、両側の負荷錘122、124を変更するだけで負荷トルクを反対向き(逆回転方向)に付与することが可能で、例えば駆動状態と被駆動状態、或いは正回転駆動と逆回転駆動などのように反対側の歯面が接触する動力伝達によるかみあい伝達誤差を容易に測定することができる。また、このように一対の負荷錘122、124の重量の差で負荷トルクを付与することから、微小な負荷トルクを高い精度で付与することが可能で、かみあい伝達誤差の測定精度を一層向上させることができるとともに、摺動抵抗等の各部の回転抵抗を相殺するように負荷トルクを付与することにより、実質的に負荷0におけるかみあい伝達誤差を測定することもできる。すなわち、図6(b) において、第1定滑車106、108が例えば右まわりに回転させられる場合に、その回転抵抗に相当するトルクが右まわりに付与されるように両側の負荷錘122、124の重量を設定すれば、負荷0で歯車装置14を噛合い回転させることができる。
【0052】
図7のかみあい伝達誤差測定装置130は、図6のかみあい伝達誤差測定装置100に対して前記図2のかみあい伝達誤差測定装置50のように減速装置52、132、134を設けた場合であり、駆動用電動モータ28や同期用電動モータ126、128を制御精度が高い通常の回転速度範囲内で回転駆動しつつ、第1回転軸20や第2定滑車110、112を1rpm以下のゆっくりした速度で回転させることができる。また、減速装置52、132、134によって減速されることによりトルクが増幅されるため、負荷錘122、124によって大きな負荷トルクを付与する場合でも、駆動用電動モータ28、同期用電動モータ126、128として小型の電動モータを採用できる。
【0053】
図8のかみあい伝達誤差測定装置140は、図6のかみあい伝達誤差測定装置100において、前記図3のかみあい伝達誤差測定装置60のように第1滑車列102および第2滑車列104を一体的に第2回転軸22の軸心に対して直角な方向へ平行移動させるとともに、連動装置62を介して第2回転軸22と第1定滑車106および108とを機械的に連結した場合である。第1定滑車106および108は、それぞれ別個に構成されているが、共通の回転軸142に取り付けられて互いに一体的に回転させられるようになっている。このように連動装置62が設けられることにより、第1滑車列102、第2滑車列104や第2回転軸22の配設位置の自由度が高くなり、例えば第2回転軸22を回転軸142の軸心を中心とする円弧に沿って平行移動可能とすることにより、連動装置62による連結状態を維持したまま第1回転軸20と第2回転軸22との軸間距離を変更することが可能で、平行軸歯車16、18の大きさすなわち中心距離が異なる種々の歯車装置14のかみあい伝達誤差を容易に測定できるようになる。
【0054】
図9のかみあい伝達誤差測定装置150は、図6のかみあい伝達誤差測定装置100において、前記図4のかみあい伝達誤差測定装置70のように一対の噛合い歯車72、74の軸心が直角に交差したり食い違っていたりする歯車装置76のかみあい伝達誤差を測定できるようにした場合である。本実施例においても、第2回転軸22や滑車列102、104、同期用電動モータ126、128を、例えば図9(a) の紙面に対して垂直で且つ第1回転軸20に対して直交する回動中心まわりに回動可能な回転テーブル等に配設すれば、傘歯車等の交差軸歯車に容易に対応できる。また、その回転テーブル上に、更に図9(a) の紙面に対して垂直な上下方向へ移動させられる上下テーブルを設け、その上下テーブルに第2回転軸22等を配設するようにすれば、ハイポイドギヤ等の食い違い軸歯車にも容易に対応できる。
【0055】
図10のかみあい伝達誤差測定装置160は、図6のかみあい伝達誤差測定装置100において、前記図5のかみあい伝達誤差測定装置80のように差動歯車装置82を含む車両用変速装置等の歯車装置84のかみあい伝達誤差を測定できるようにした場合で、差動歯車装置82の他方の出力軸を回転駆動したり回転角を検出したりするために第3回転軸90、駆動用電動モータ92、およびロータリエンコーダ94が設けられる。
【0056】
図11のかみあい伝達誤差測定装置170は、図6のかみあい伝達誤差測定装置100において第2滑車列104側の同期用電動モータ128を省略し、ベルトおよびプーリや複数の噛合い歯車等から成る連動装置172を介して両滑車列102、104の第2定滑車110と112とを機械的に連結することにより、単一の同期用電動モータ126によりそれ等の第2定滑車110および112が共に回転駆動されるようになっている。第2定滑車110および112の回転方向は同じで、回転速度は径寸法に応じて定められるが、本実施例では第2定滑車110および112、第1定滑車106および108の径寸法は何れも等しく、回転速度も同じで良い。したがって、連動装置172は、第2定滑車110および112が同じ回転方向へ同じ速度で回転するように設けられれば良い。
【0057】
図12のかみあい伝達誤差測定装置180は、第1実施例のかみあい伝達誤差測定装置10において、第1回転軸20側にも滑車列182を配設して釣合錘184を吊り下げ、第2回転軸22側の負荷錘38と釣り合わせるようにしたものである。滑車列182は、前記滑車列12と同様に第1定滑車186、第2定滑車188、連結具としての連結ワイヤ190、および動滑車192を備えており、動滑車192に釣合錘184が吊り下げられるとともに、第1定滑車186は第1回転軸20に取り付けられて一体的に回転させられるようになっている。そして、第1回転軸20の回転に伴って連結ワイヤ190は第1定滑車186から巻き戻され、或いは第1定滑車186に巻き取られるが、その巻き戻しや巻き取りに拘らず動滑車192や釣合錘184が略一定の高さ位置に保持されるように、その第1定滑車186の回転に同期して第2定滑車188が同期用電動モータ194によって回転駆動され、連結ワイヤ190が第2定滑車188から巻き戻され、或いは第2定滑車188に巻き取られるようになっている。図12の(c) は、図12の(a) におけるC矢視図に相当する図で、滑車列182を示す正面図である。
【0058】
この場合には、駆動用電動モータ28に負荷錘38の負荷が殆ど作用しないようにできるため、駆動用電動モータ28は単に第1回転軸20を回転させるだけで良く、大きな負荷トルクを付与してかみあい伝達誤差を測定する場合でも第1回転軸20を一定の回転速度で安定して回転駆動できるとともに、駆動用電動モータ28として小型で安価な電動モータを採用できる。
【0059】
なお、この第1回転軸20側にも、前記図6の第1滑車列102、第2滑車列104のように一対の滑車列を設けて、互いに逆回転方向にトルクが作用する一対の釣合錘を吊り下げるようにすることが可能である。
【0060】
以上、本発明の実施例を図面に基づいて詳細に説明したが、これ等はあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【図面の簡単な説明】
【0061】
【図1】本発明の一実施例であるかみあい伝達誤差測定装置を説明する概略図で、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図2】本発明の他の実施例を説明する図で、各電動モータに減速装置を設けた場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図3】本発明の更に別の実施例を説明する図で、連動装置を介して滑車列を接続した場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図4】本発明の更に別の実施例を説明する図で、交差軸歯車や食い違い軸歯車のかみあい伝達誤差を測定する場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図5】本発明の更に別の実施例を説明する図で、車両用変速機等の差動歯車装置を有する歯車装置のかみあい伝達誤差を測定する場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図6】本発明の更に別の実施例を説明する図で、第2回転軸の両側に滑車列が設けられて負荷錘の差に相当する負荷トルクが付与される場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図7】本発明の更に別の実施例を説明する図で、図6の実施例の各電動モータに減速装置を設けた場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図8】本発明の更に別の実施例を説明する図で、図6の実施例において連動装置を介して滑車列を接続した場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図9】本発明の更に別の実施例を説明する図で、図6の実施例において交差軸歯車や食い違い軸歯車のかみあい伝達誤差を測定する場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図10】本発明の更に別の実施例を説明する図で、図6の実施例において車両用変速機等の差動歯車装置を有する歯車装置のかみあい伝達誤差を測定する場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図11】本発明の更に別の実施例を説明する図で、図6の実施例において両滑車列の第2定滑車を連動装置で機械的に連結した場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図である。
【図12】本発明の更に別の実施例を説明する図で、図1の実施例において第1回転軸側にも滑車列を設けて釣合錘により第2回転軸側の負荷錘と釣り合わせるようにした場合であり、(a) は平面図、(b) は(a) におけるB矢視図に相当する滑車列の正面図、(c) は(a) におけるC矢視図に相当する滑車列の正面図である。
【符号の説明】
【0062】
10、50、60、70、80、100、130、140、150、160、170、180:かみあい伝達誤差測定装置 12:滑車列 14、76、84:歯車装置 20:第1回転軸 22:第2回転軸 24、26、94:ロータリエンコーダ 28、92:駆動用電動モータ 30、106、108:第1定滑車 32、110、112:第2定滑車 34、114、116:連結ワイヤ(連結具) 36、118、120:動滑車 38、122、124:負荷錘 40、126、128:同期用電動モータ 90:第3回転軸(第1回転軸) 102:第1滑車列 104:第2滑車列
【特許請求の範囲】
【請求項1】
互いに噛み合う複数の歯車を有する歯車装置を介して連結された第1回転軸および第2回転軸に所定の負荷トルクを付与した状態で、該第1回転軸を回転駆動して前記歯車装置を噛合い回転させるとともに、該第1回転軸および第2回転軸の回転角をそれぞれロータリエンコーダにより検出して該歯車装置のかみあい伝達誤差を測定する装置であって、
前記第1回転軸を回転駆動する駆動用電動モータと、
一対の第1定滑車および第2定滑車と、該第1定滑車および第2定滑車の双方に連結されるとともに何れか一方に所定長さだけ巻き付けられた連結具と、該連結具に相対移動可能に引っ掛けられた動滑車とを有し、該第1定滑車が前記第2回転軸の回転に伴って機械的に回転させられる滑車列と、
前記動滑車に取り付けられ、重力により前記連結具および前記第1定滑車を介して前記第2回転軸に前記負荷トルクを付与する負荷錘と、
前記第2回転軸の回転に伴う前記第1定滑車の回転で、前記連結具が該第1定滑車に巻き取られ或いは該第1定滑車から巻き戻されても、前記動滑車の上下動が所定の範囲内に維持されるように、該第1定滑車の回転に同期して前記第2定滑車を回転駆動することにより該連結具を該第2定滑車から巻き戻し或いは該第2定滑車に巻き取る同期用電動モータと、
を有することを特徴とするかみあい伝達誤差の測定装置。
【請求項2】
前記滑車列は、それぞれ前記第1定滑車、第2定滑車、連結具、および動滑車を有する第1滑車列および第2滑車列を備えており、
該第1滑車列および第2滑車列の動滑車にそれぞれ取り付けられる負荷錘により前記第2回転軸には互いに逆回転方向のトルクが作用し、両負荷錘の重量の差に応じた負荷トルクが付与される
ことを特徴とする請求項1に記載のかみあい伝達誤差の測定装置。
【請求項3】
互いに噛み合う複数の歯車を有する歯車装置を介して連結された第1回転軸および第2回転軸に所定の負荷トルクを付与した状態で、該第1回転軸を回転駆動して前記歯車装置を噛合い回転させるとともに、該第1回転軸および第2回転軸の回転角をそれぞれロータリエンコーダにより検出して該歯車装置のかみあい伝達誤差を測定する方法であって、
一対の第1定滑車および第2定滑車と、該第1定滑車および第2定滑車の双方に連結されるとともに何れか一方に所定長さだけ巻き付けられた連結具と、該連結具に相対移動可能に引っ掛けられた動滑車とを有し、該第1定滑車が前記第2回転軸の回転に伴って機械的に回転させられる滑車列を備えており、
前記動滑車に負荷錘を取り付け、該負荷錘の重力により前記第2回転軸に前記負荷トルクを付与しつつ、前記第1回転軸を回転駆動して前記歯車装置を噛合い回転させる一方、
前記第2回転軸の回転に伴う前記第1定滑車の回転で、前記連結具が該第1定滑車に巻き取られ或いは該第1定滑車から巻き戻されても、前記動滑車の上下動が所定の範囲内に維持されるように、該第1定滑車の回転に同期して前記第2定滑車を回転駆動することにより該連結具を該第2定滑車から巻き戻し或いは該第2定滑車に巻き取る
ことを特徴とするかみあい伝達誤差の測定方法。
【請求項4】
前記滑車列は、それぞれ前記第1定滑車、第2定滑車、連結具、および動滑車を有する第1滑車列および第2滑車列を備えており、
該第1滑車列および第2滑車列の動滑車にそれぞれ取り付けられる負荷錘により前記第2回転軸には互いに逆回転方向のトルクが作用し、両負荷錘の重量の差に応じた負荷トルクが付与される
ことを特徴とする請求項3に記載のかみあい伝達誤差の測定方法。
【請求項1】
互いに噛み合う複数の歯車を有する歯車装置を介して連結された第1回転軸および第2回転軸に所定の負荷トルクを付与した状態で、該第1回転軸を回転駆動して前記歯車装置を噛合い回転させるとともに、該第1回転軸および第2回転軸の回転角をそれぞれロータリエンコーダにより検出して該歯車装置のかみあい伝達誤差を測定する装置であって、
前記第1回転軸を回転駆動する駆動用電動モータと、
一対の第1定滑車および第2定滑車と、該第1定滑車および第2定滑車の双方に連結されるとともに何れか一方に所定長さだけ巻き付けられた連結具と、該連結具に相対移動可能に引っ掛けられた動滑車とを有し、該第1定滑車が前記第2回転軸の回転に伴って機械的に回転させられる滑車列と、
前記動滑車に取り付けられ、重力により前記連結具および前記第1定滑車を介して前記第2回転軸に前記負荷トルクを付与する負荷錘と、
前記第2回転軸の回転に伴う前記第1定滑車の回転で、前記連結具が該第1定滑車に巻き取られ或いは該第1定滑車から巻き戻されても、前記動滑車の上下動が所定の範囲内に維持されるように、該第1定滑車の回転に同期して前記第2定滑車を回転駆動することにより該連結具を該第2定滑車から巻き戻し或いは該第2定滑車に巻き取る同期用電動モータと、
を有することを特徴とするかみあい伝達誤差の測定装置。
【請求項2】
前記滑車列は、それぞれ前記第1定滑車、第2定滑車、連結具、および動滑車を有する第1滑車列および第2滑車列を備えており、
該第1滑車列および第2滑車列の動滑車にそれぞれ取り付けられる負荷錘により前記第2回転軸には互いに逆回転方向のトルクが作用し、両負荷錘の重量の差に応じた負荷トルクが付与される
ことを特徴とする請求項1に記載のかみあい伝達誤差の測定装置。
【請求項3】
互いに噛み合う複数の歯車を有する歯車装置を介して連結された第1回転軸および第2回転軸に所定の負荷トルクを付与した状態で、該第1回転軸を回転駆動して前記歯車装置を噛合い回転させるとともに、該第1回転軸および第2回転軸の回転角をそれぞれロータリエンコーダにより検出して該歯車装置のかみあい伝達誤差を測定する方法であって、
一対の第1定滑車および第2定滑車と、該第1定滑車および第2定滑車の双方に連結されるとともに何れか一方に所定長さだけ巻き付けられた連結具と、該連結具に相対移動可能に引っ掛けられた動滑車とを有し、該第1定滑車が前記第2回転軸の回転に伴って機械的に回転させられる滑車列を備えており、
前記動滑車に負荷錘を取り付け、該負荷錘の重力により前記第2回転軸に前記負荷トルクを付与しつつ、前記第1回転軸を回転駆動して前記歯車装置を噛合い回転させる一方、
前記第2回転軸の回転に伴う前記第1定滑車の回転で、前記連結具が該第1定滑車に巻き取られ或いは該第1定滑車から巻き戻されても、前記動滑車の上下動が所定の範囲内に維持されるように、該第1定滑車の回転に同期して前記第2定滑車を回転駆動することにより該連結具を該第2定滑車から巻き戻し或いは該第2定滑車に巻き取る
ことを特徴とするかみあい伝達誤差の測定方法。
【請求項4】
前記滑車列は、それぞれ前記第1定滑車、第2定滑車、連結具、および動滑車を有する第1滑車列および第2滑車列を備えており、
該第1滑車列および第2滑車列の動滑車にそれぞれ取り付けられる負荷錘により前記第2回転軸には互いに逆回転方向のトルクが作用し、両負荷錘の重量の差に応じた負荷トルクが付与される
ことを特徴とする請求項3に記載のかみあい伝達誤差の測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2007−40787(P2007−40787A)
【公開日】平成19年2月15日(2007.2.15)
【国際特許分類】
【出願番号】特願2005−224124(P2005−224124)
【出願日】平成17年8月2日(2005.8.2)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成19年2月15日(2007.2.15)
【国際特許分類】
【出願日】平成17年8月2日(2005.8.2)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]