
じゃかごの解析モデル、じゃかごの挙動解析方法、線材の解析モデルおよび線材の変形解析方法
【課題】鋼製枠、金網と中詰材(石材)で構成されたじゃかごの力学的・耐震的挙動を正確に解明できるじゃかごの解析モデルおよびじゃかごの挙動解析方法を提供する。
【解決手段】網状部材によって形成される網箱10と、収容体内に収容された中詰材5とからなるじゃかごの解析モデルであって、中詰材5には複数の粒状体Mからなるモデルを採用しており、収容体の網状部材には、網状部材を形成する線材が線材の軸方向に沿って並んで配設された複数の粒子CMと、複数の粒子CMにおける隣接する粒子CM間に粒子CM間の隙間を埋めるように設けられた連結部材EBとを有するモデルを採用しており、網状部材を形成する同一の線材中の連結部材EBと粒子CMとの間には、両者の間で滑りが生じずかつ離間しない接触条件を採用している。
【解決手段】網状部材によって形成される網箱10と、収容体内に収容された中詰材5とからなるじゃかごの解析モデルであって、中詰材5には複数の粒状体Mからなるモデルを採用しており、収容体の網状部材には、網状部材を形成する線材が線材の軸方向に沿って並んで配設された複数の粒子CMと、複数の粒子CMにおける隣接する粒子CM間に粒子CM間の隙間を埋めるように設けられた連結部材EBとを有するモデルを採用しており、網状部材を形成する同一の線材中の連結部材EBと粒子CMとの間には、両者の間で滑りが生じずかつ離間しない接触条件を採用している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、じゃかごの解析モデル、じゃかごの挙動解析方法、線材の解析モデルおよび線材の変形解析方法に関する。
じゃかごとは、金網等を箱状に組み立てたかご等の中に、石材(中詰材)を充填した構造を有するものであり、河川護岸や擁壁などに用いられている。かかるじゃかごを利用した工法は、経験に依存した伝統的工法であるため、これまで学術上の理論的評価が行われておらず、資材としてのじゃかごの価値を高めるためには、力学特性、耐震機能などの性能を定量的に解明する必要がある
本発明は、かかるじゃかごの力学特性、耐震機能などの性能を定量的に解明するために使用されるじゃかごの解析モデル、じゃかごの挙動解析方法、線材の解析モデルおよび線材の変形解析方法に関する。
【背景技術】
【0002】
じゃかごは、金網等を箱状に組み立てたかご等の中に石材(中詰材)を充填して形成されており、かご等と中詰材、また、中詰材同士が相互に影響しあって変形したり相対的な位置を変えたりするので、その力学挙動は複雑で未解明な点が多い。また、じゃかごは、その力学挙動を実験により把握しようとしても、力を加えたときの変形等を外部から観察することはできても、中詰材とかご等との間においてどのように力が伝達されているかなどについて、詳細を知ることが難しい。
したがって、じゃかごの力学挙動を把握する上では、数値解析モデルを用いた検討が有効な手段となり得ることから、適切なモデルの検討が行われている(例えば、非特許文献1、2)。
【0003】
非特許文献1では、中詰材を粒状体としてモデル化した鋼製組立網(じゃかご)全体系の連成解析手法が提案されている。この非特許文献1では、中詰材は粒状体としてモデル化しているが、鋼製網枠を構成する金網・丸棒には弾塑性有限要素法による離散近似モデルを適用し、金網は曲げ剛性を持たない弾塑性膜要素(3節点三角形要素)でモデル化している。
具体的には、金網には菱形金網を採用し、三角形要素の膜構造モデルを適用しており、金網を構成する列線の曲げ剛性は回転バネでモデル化するとともに、接合点には接触バネを導入している。また、丸棒ははり要素によりモデル化している。中詰材は粒状体でモデル化し、ボクセル球を用いた形状近似により、多面体で表現している。
【0004】
また、非特許文献2では、個別要素法を用いて中詰材を粒状体(球、楕円、立方体)によってモデル化し、金網については接合点に粒状体モデルを導入している。そして、接合点の粒状体に金網の鉄線に関する力−変形関係(弾塑性関係)を与え、金網の鉄線の動きを見かけ上表現できるようなアルゴリズムを構築している。
【0005】
しかるに、非特許文献1では、1)三角形要素によるモデル化、2)膜構造モデルの適用、3)曲げ剛性の無視、4)一要素による金網・丸棒のモデル化を行っているので、金網は現実的なモデルとなっていない。このため、金網の変形特性・力学特性を正確に検討することができない。例えば、じゃかごでは、地震のように大きな外力を受けると、中詰材が金網に接触し、金網から中詰材が孕み出す状況になる。しかし、非特許文献1では、膜構造モデルを採用した結果、こうした挙動を再現することは極めて困難であるから、中詰材と金網の連成挙動を正確に捉えることはできない。
【0006】
一方、非特許文献2では、非特許文献1と異なり金網を膜構造でモデル化していないので、金網から中詰材が孕み出すような状況を再現できる。しかし、非特許文献2のモデルでは、金網の接合点には金網の鉄線の力−変形関係が付与されているものの、金網自体には変形性能が与えられていないので、金網を構成する鉄線が撓むことはない。こうした挙動は、金網の現実の変形挙動とはかけ離れており、金網の力学挙動を正確に知ることはできない。
【0007】
以上のごとく、現在のところ金網と中詰材の連成挙動を正確に解明できるモデルや解析方法は開発されておらず、じゃかごの変形・力学特性を解明する適切なモデルや解析手法が求められている。
【先行技術文献】
【非特許文献】
【0008】
【非特許文献1】阿部和久・細谷栄作・小関徹:中詰材に粒状体モデルを用いた鋼製組立網の変形解析、計算数理工学論文集、Vol.5、pp.13-18、2005年6月.
【非特許文献2】Bertrand, D.,Gotteland, P.,Lambert, S.,Nicot, F.,Derache,F.: A multiscale mechanical modelling of unusual geocomposite material for rockfall impact, Proc. 9th Int. Congr. NUMOG, pp.709-716,2004.
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は上記事情に鑑み、鋼製枠、金網と中詰材(石材)で構成されたじゃかごの力学的・耐震的挙動を正確に解明できるじゃかごの解析モデルおよびじゃかごの挙動解析方法を提供することを目的とする。
また、曲げモーメントが加わったときにおける線材の変形を解明できる線材の解析モデルおよび変形解析方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
(じゃかごの解析モデル)
第1発明のじゃかごの解析モデルは、網状部材によって形成される収容体と、該収容体内に収容された中詰材とからなるじゃかごの解析モデルであって、前記中詰材には、複数の粒状体からなるモデルを採用しており、前記収容体の網状部材には、該網状部材を形成する線材が、その構成要素として、該線材の軸方向に沿って並んで配設された複数の粒子と、該複数の粒子における隣接する粒子間に該粒子間の隙間を埋めるように設けられた連結部材とを有するモデルを採用しており、前記中詰材の隣接する粒状体間には、該粒状体間の滑りおよび接触離間を考慮した接触条件を採用し、前記網状部材を形成する同一の線材中の隣接する粒子間には、該粒子同士が常に接触した状態に保たれかつ該粒子間で滑りが生じない接触条件を採用し、前記網状部材を形成する同一の線材中の連結部材と粒子との間には、両者の間で滑りが生じずかつ離間しない接触条件を採用し、前記網状部材を形成する線材のうち、異なる線材中の構成要素間には、該構成要素間の滑りおよび接触離間を考慮した接触条件を採用し、前記中詰材の粒状体と前記収容体の線材を構成する構成要素との間には、両者間の滑りおよび接触離間を考慮した接触条件を採用していることを特徴とする。
第2発明のじゃかごの解析モデルは、第1発明において、前記網状部材を形成する線材において、前記複数の粒子における隣接する粒子同士は点接触し、前記粒子と前記連結部材との間は面接触する接触条件を採用していることを特徴とする。
(じゃかごの挙動解析方法)
第3発明のじゃかごの挙動解析方法は、第1または第2発明のじゃかごの解析モデルを用いて、個別要素法 によるシミュレーションによりじゃかごの挙動を求めることを特徴とする。
第4発明のじゃかごの挙動解析方法は、第3発明において、前記収容体の上面および/または下面、および/または前記収容体の側面に位置する前記網状部材の変形過程を、拘束または非拘束の条件においてシミュレーションすることを特徴とする。
(線材の解析モデル)
第5発明の線材の解析モデルは、軸方向に長い線材の解析モデルであって、該線材に、該線材の軸方向に沿って並んで配設された複数の粒子と、該複数の粒子における隣接する粒子間に、該粒子間の隙間を埋めるように設けられた連結部材と、によって構成されたモデルを採用しており、前記複数の粒子における隣接する粒子間には、該粒子同士が常に接触した状態に保たれかつ該粒子間で滑りが生じない接触条件を採用し、前記連結部材と前記粒子との間には、両者の間で滑りが生じない接触条件を採用していることを特徴とする。
第6発明の線材の解析モデルは、第5発明において、前記複数の粒子における隣接する粒子同士は点接触し、前記粒子と前記連結部材との間は面接触する接触条件を採用していることを特徴とする。
(線材の解析手法)
第7発明の線材の変形解析方法は、第5または第6発明の解析モデルを用いて、個別要素法 によるシミュレーションにより線材の変形を求めることを特徴とする。
【発明の効果】
【0011】
(じゃかごの解析モデル)
第1発明によれば、中詰材を複数の粒状体でモデル化し、網状部材の線材は複数の粒子と複数の粒子間に配置された連結部材によってモデル化しているので、網状部材から中詰材が孕み出すような状況であっても再現できる。しかも、網状部材の線材を複数の粒子と連結部材とからなるモデルとしたことによって、網状部材の線材自体の変形も再現できる。そして、線材を構成する隣接する粒子間では粒子同士が常に接触した状態に保たれかつ滑りが生じない接触条件を採用し、かつ、粒子と連結部材との間では滑りが生じずかつ離間しない接触条件を採用しているので、線材の曲げや撓み等をより現実の変形挙動に近い状態で再現でき、線材の変形が現実の変形挙動と乖離したものとなること防ぐことができる。
第2発明によれば、隣接する粒子同士を点接触させかつ粒子と連結部材とは面接触させた状態でモデル化しているので、線材の曲げや撓み等をより現実の変形挙動に近い状態で再現できる。
(じゃかごの挙動解析方法)
第3発明によれば、第1または第2発明の解析モデルを用いて、個別要素法によりじゃかごの変形挙動を計算しているので、網状部材から中詰材が孕み出すような状況や網状部材の線材自体の変形も再現することができる。よって、計算によって再現される中詰材の挙動や網状部材の変形挙動をより現実の挙動に近づけることができるから、じゃかごを構成する中詰材や網状部材の力学挙動を正確に把握することができる。
第4発明によれば、積層された状態でのじゃかごの挙動を把握することができるので、実際に施工された状態におけるじゃかごを構成する中詰材や網状部材の力学挙動を把握することができる。
(線材の解析モデル)
第5発明によれば、複数の粒子とこの粒子同士の間に配置された連結部材とによって線材をモデル化しており、しかも、線材を構成する隣接する粒子間では粒子同士が常に接触した状態に保たれかつ粒子と連結部材との間では滑りが生じずかつ離間しない接触条件を採用している。よって、線材に曲げモーメントが加わった場合でも、線材の曲げや撓み等をより現実の変形挙動に近い状態で再現できる。
第6発明によれば、隣接する粒子同士を点接触させかつ粒子と連結部材とは面接触させた状態でモデル化しているので、線材の曲げや撓み等をより現実の変形挙動に近い状態で再現できる。
(線材の挙動解析方法)
第7発明によれば、第5または第6発明の解析モデルを用いて、個別要素法により線材の変形挙動を計算しているので、線材の曲げや撓み等をより現実の変形挙動に近い状態で再現できる。よって、計算によって再現される線材の変形挙動をより現実の挙動に近づけることができるから、線材の力学挙動を正確に把握することができる。
【図面の簡単な説明】
【0012】
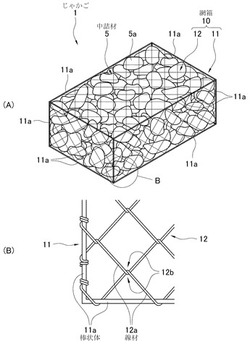
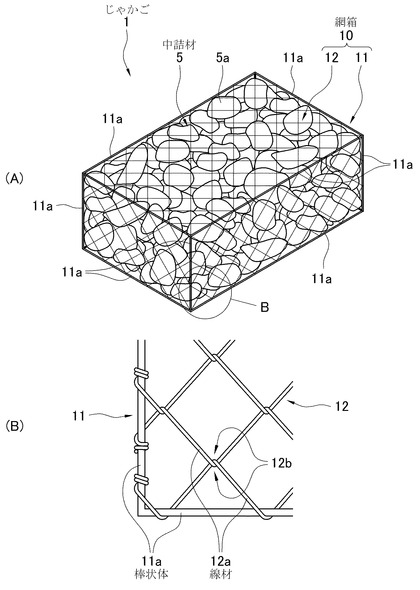
【図1】本発明の対象となるじゃかご1の概略説明図であって、(A)は外観の斜視図であり、(B)は網箱10の部分概略拡大図である。
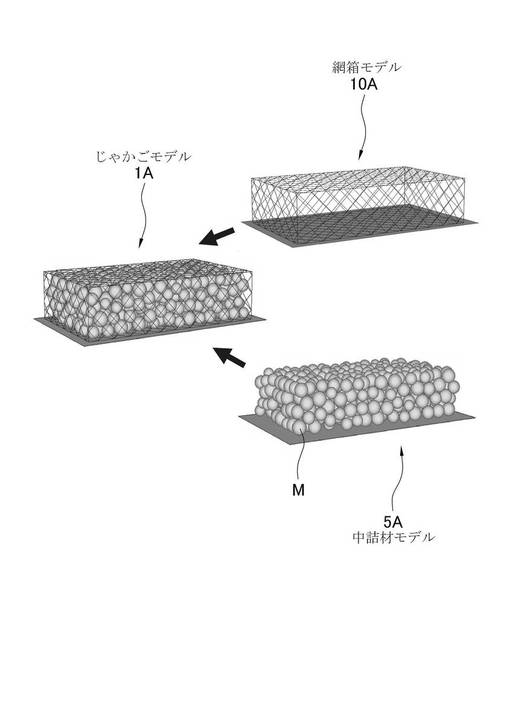
【図2】本発明のじゃかごモデル1Aの概略説明図である。
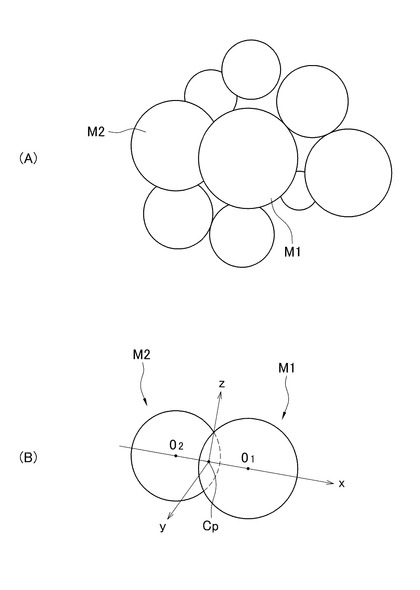
【図3】(A)は中詰材モデル5Aの部分拡大図であり、(B)は隣接する粒状体M1,M2間の接触点CPにおける座標軸を説明した図である。
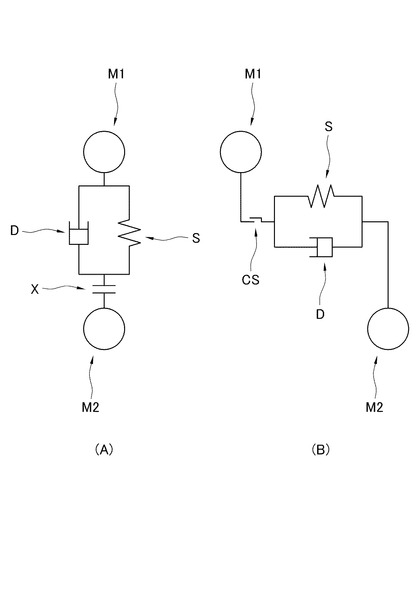
【図4】(A)は隣接する粒状体M1,M2間の接触点CPにおけるX軸方向の力学モデルであり、(B)は隣接する粒状体M1,M2間の接触点CPにおけるY軸およびZ軸方向の力学モデルである。
【図5】(A)は線材モデルLMの概略拡大説明図であり、(B)は線材モデルLMを構成する連結部材EBの概略説明図である。
【図6】隣接する粒子CMと連結部材EBとの間の接触点CPにおける力学モデルである。
【図7】(A)は線材12aの屈曲部12b同士が係合している部分の拡大説明図であり、(B)は(A)の状態を線材モデルLMによって表現した概略図であり、(C)は(A)の状態から線材12aの屈曲部12b同士が離間した状態を線材モデルLMで表現した概略図である。
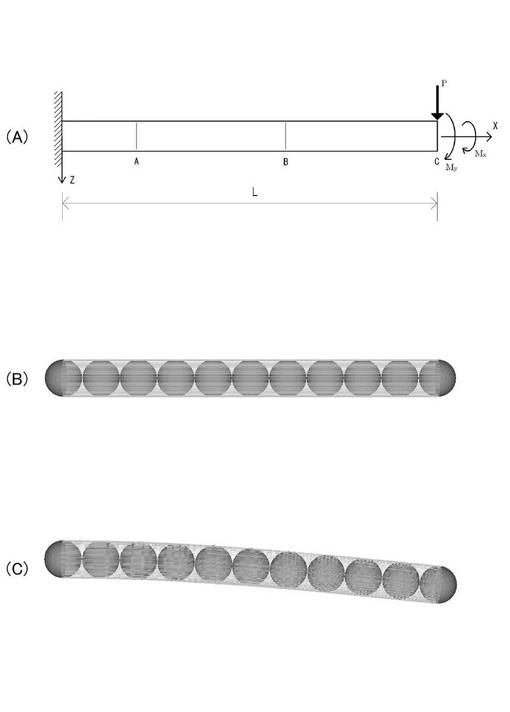
【図8】(A)は片持ち梁の概略説明図であり、(B)は本発明の線材モデルLMによってモデル化した片持ち梁モデルの概略図であり、(C)は片持ち梁モデルの先端に集中荷重と曲げモーメントを加えた場合における片持ち梁の変形状態の解析結果を示した図である。
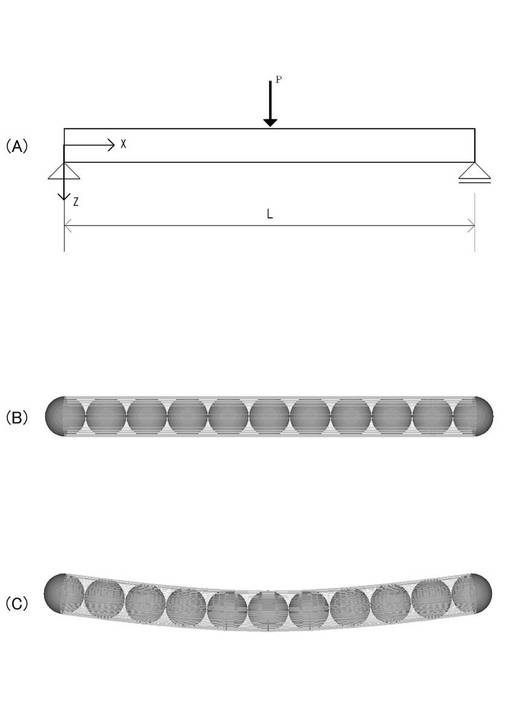
【図9】(A)は単純梁の概略説明図であり、(B)は本発明の線材モデルLMによってモデル化した単純梁の概略図であり、(C)は単純梁の中央に集中荷重を加えた場合における単純梁の変形状態の解析結果を示した図である。
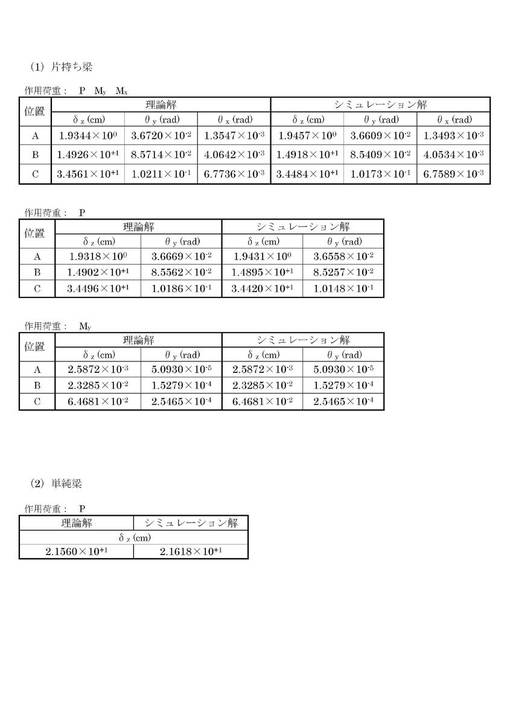
【図10】片持ち梁および単純梁の解析結果を、理論解と比較した図である。
【図11】載荷実験結果を示した図である。
【図12】載荷解析結果を示した図である。
【図13】共振実験結果を示した図である。
【図14】共振解析結果を示した図である。
【発明を実施するための形態】
【0013】
つぎに、本発明の実施形態を図面に基づき説明する。
本発明は、河川護岸や擁壁等に使用されるじゃかごの挙動を解析するための解析モデルおよびそのモデルを用いた挙動解析方法であり、中詰材だけでなく、金網を構成する線材についても複数の粒子からなるモデルとしたことに特徴を有している。つまり、金網を構成する線材自体のモデル化に個別要素法に基づくモデル化を採用したことに特徴を有している。
【0014】
まず、解析モデルや挙動解析方法を説明する前に、じゃかごについて簡単に説明する。
【0015】
図1は本発明の対象となるじゃかご1の概略説明図であって、(A)は外観の斜視図であり、(B)は網箱10の部分概略拡大図である。同図に示すように、じゃかご1は、箱状の網箱10と、その網箱10の中に収容された中詰材5とから構成されている。
【0016】
図1に示すように、中詰材5は複数の石材5aから構成されている。複数の石材5aは互いに固定されておらず、相対的に移動できる状態で網箱10内に収容されている。つまり、複数の石材5aは、互いに押し合ったり、互いに接触した状態で滑ったりできる状態、また、互いに接触した状態から離間したり逆に離間した状態から接近して接触したりできる状態(以下、接触離間できる状態という)で網箱10内に収容されているのである。
なお、中詰材5は複数の塊状の物体から構成されておればよく、実際のじゃかごでは石材に限られず、骨材や、コンクリート塊等、また、これら(石材、骨材、コンクリート塊等)と土との混合物等も中詰材5として使用されている。
【0017】
図1に示すように、網箱10は、複数本の棒状体11aから形成される枠部11と、この枠部11に取り付けられる網部12とから構成されている。
【0018】
枠部11は、複数本の棒状体11aを連結して形成された部材である。この枠部11は、網箱10の骨組みとなる部材であり、網箱10は、枠部11の形状に形成される。例えば、図1であれば、枠部11が略直方体状に形成されているので、網箱10が略直方体状となるのである。
なお、以下の実施形態では、枠部11が略直方体状に形成されている場合、つまり、網箱10が略直方体状に形成されている場合を説明するが、網箱10の形状は直方体に限られず、円筒形や多角形、複合波形等としてもよく、その形状は特に限定されない。
【0019】
図1に示すように、前記枠部11において、棒状体11aに囲まれている各面には、網部12が設けられている。この網部12は鉄線等の線材12a同士を編んで形成されたものである。具体的には、一の線材12aを屈曲した屈曲部12bと、他の線材12aの屈曲部12bが係合した状態となるように形成されている。そして、互いに係合している線材12a同士は、屈曲部12b同士が係合しているだけであるので、ある程度自由に動くことができるように構成されている。つまり、網部12は、係合した線材12a同士が互いに接触した状態で滑ったり接触離間したり引っ張り合ったりできる状態となるように形成されているのである。
【0020】
この網部12は、その外周縁が枠部11の棒状体11aに対して取り付けられている。具体的には、網部12はその線材12aの屈曲部12bを棒状体11aに引っ掛けたり、また、線材12aの端部を棒状体11aに巻き付けたりなどして、枠部11に取り付けられている。
なお、網部12を枠部11の棒状体11aに取り付ける方法はとくに限定されない。例えば、網部12の外周縁に位置する線材12aを上述したような方法で棒状体11aに取り付ければ、線材12は、棒状体11aから離れることは無いが棒状体11aに沿ってある程度自由に動くことができる。また、網部12が枠部11に対して移動できないように、網部12の外周縁を溶接などによって完全に棒状体11aに固定してもよい。
【0021】
以上のごとき構成であるから、じゃかご1に対して変形させようとする力、例えば、じゃかご1を上下方向から圧縮する力やじゃかご1を左右上下に振動させる力等が加わった場合、じゃかご1は変形して力を吸収することができる。
具体的には、じゃかご1に力が加わると、中詰材5は複数の石材5aが押し合うので、複数の石材5aは、石材5a同士の相互作用により相対的な位置を変える。すると、じゃかご1に加わる力は、石材5aの運動エネルギや摩擦熱等に変換されて吸収される。また、石材5aが移動すると、石材5aが網箱10の網部12を押すので、網部12も、その線材12aが曲がったり屈曲部12b同士が離間したりすることによって変形してじゃかご1に加わる力を吸収する。
したがって、じゃかご1に対して変形させようとする力が加わっても、じゃかご1の各要素(中詰材5、網箱10)の移動変形によってこの力が吸収されるから、じゃかご1自体が大きく破損することを防ぐことができる。
【0022】
つぎに、じゃかごの解析モデルについて説明する。
図2は本発明のじゃかごモデル1Aの概略説明図である。
本発明では、上述したような形状、特性を有するじゃかご1を、個別要素法を用いてモデル化しているのであるが、図2に示すように、中詰材5と網箱10とをそれぞれ別々にモデル化している。そして、別々にモデル化された中詰材モデル5Aと網箱モデル10Aとを組み合わせて、じゃかごモデル1Aを形成している。
【0023】
(中詰材モデルの説明)
まず、中詰材モデル5Aについて説明する。
図3(A)は中詰材モデル5Aの部分拡大図であり、(B)は隣接する粒状体M1,M2間の接触点CPにおける座標軸を説明した図である。
図4(A)は隣接する粒状体M1,M2間の接触点CPにおけるX軸方向の力学モデルであり、(B)は隣接する粒状体M1,M2間の接触点CPにおけるY軸およびZ軸方向の力学モデルである。
【0024】
(構造モデルの説明)
中詰材5は、上述したように複数の石材5aから構成されているので、中詰材モデル5Aは、石材5aに相当する粒状体Mが複数集合したモデルとしている。具体的には、粒径が不均一な複数の粒状体Mがランダムに存在しているモデルを、中詰材モデル5Aとしている(図2、図3(A)参照)。なお、各粒状体Mは、変形しない剛体球と仮定している。
【0025】
(力学モデルの説明)
また、本実施形態の中詰材モデル5Aでは、粒状体M同士の接触点CPにおける相互作用を以下のような力学モデルで表現している。
図3(B)に示すように、中詰材モデル5Aにおいて、隣接する粒状体M1,M2間の接触点CPと両者の中心O1,O2を通る軸をX軸とし、このX軸と直交する2軸をY軸、Z軸とする。
この場合において、本実施形態の中詰材モデル5Aでは、図4(A)に示すように、接触点CPにおけるX軸方向の力学モデルとして、粒状体M間にスプリングS・ダッシュポットD・ディバイダXを配置したモデルを採用している。つまり、フォークトモデル(スプリングSとダッシュポットDとが並列に配置されたモデル)によって隣接する粒状体M1,M2の接触点CPにおいてX軸方向に沿って働く力を表現し、ディバイダXによって粒状体M1,M2が接触した状態と非接触となった状態の2つの状態を取り得ることを表現している。
【0026】
一方、本実施形態の中詰材モデル5Aでは、図4(B)に示すように、接触点CPにおけるY軸方向およびZ軸方向の力学モデルとして、粒状体M間にスプリングS・ダッシュポットD・クーロンスライダCSを配置したモデルを採用している。つまり、フォークトモデルによって隣接する粒状体M1,M2の接触点CPにおいてY軸方向またはZ軸方向に沿って働く力を表現し、クーロンスライダCSによって粒状体M1,M2間における摩擦相互作用、つまり、粒状体M1,M2が互いに滑って移動することがあり得ることを表現している。
【0027】
(運動方程式の説明)
そして、上記のごとき力学モデルを採用した場合には、粒状体M1,M2が接触している場合には、粒状体M1については、粒状体M2との接触点CPにおける各軸方向について下記数1および数2がそれぞれ成立する。
【0028】
なお、下記数1および数2において、粒状体M1の半径をr1とすると、符号m1は粒状体M1の質量、符号uは粒状体M1の粒状体M2に対する並進変位、符号φは粒状体M1の粒状体M2に対する回転変位、符号K1,K2は粒状体M1、M2間のバネの弾性定数、符号η1,η2は粒状体M1、M2間のダッシュポットの粘性係数、符号I1は粒状体M1の慣性モーメント(=ρp8πr15/15、ρpは粒状体M1の密度)を示している。f1,f2はそれぞれ粒状体M1に粒状体M2から加わるu,φ方向の力あるいは粒状体M1に直接加わる強制外力である。
また、バネの弾性定数K1,K2、ダッシュポットの粘性係数η1,η2は、接触点CPにおける各軸方向についてそれぞれ定められる。そして、これらの具体的な数値は、解析対象となる実際のじゃかごに使用される中詰材の密度や剛性、摩擦係数、材料減衰の大きさ等に応じて設定する。
【0029】
【数1】

【数2】
【0030】
そして、中詰材5では、一つの石材5aに対して複数の石材5aが接触しているので、中詰材モデル5Aでも一つの粒状体Mに複数の粒状体Mが接触しているモデルとなる(図2、図3(A)参照)。
【0031】
よって、ある粒状体M(対象粒状体M)と、この対象粒状体Mに接触している全ての粒状体Mとの接触点CPにおける各軸方向について成立する運動方程式を連立して解けば、各軸に対する対象粒状体Mの並進変位u、対象粒状体Mの回転変位φが得られるので、対象粒状体Mの運動を求めることができる。
【0032】
そして、中詰材モデル5Aに対して力を加えたときにおける中詰材モデル5Aの変形挙動は、その構成要素となる全ての粒状体Mの運動が合成されたものであるので、全ての粒状体Mの運動を求めれば、中詰材モデル5Aの変形挙動を求めることができる。
【0033】
なお、中詰材モデル5Aを構成する各粒子Mについて、隣接する粒子Mとの接触点において成立する運動方程式は、数1および数2のパラメータを、各粒子Mおよび隣接する粒子Mに合わせて適切な値とすることによって形成することができる。つまり、粒子Mの大きさや物性および隣接する粒子Mの大きさや物性が異なっても、上記数1および数2のパラメータ(r、m、K、η、I、f)を変更すれば、各粒子Mと隣接する粒子Mとの接触点において成立する運動方程式を形成することができる。
【0034】
例えば、粒状体M1と接触している上記粒状体M2であれば、粒状体M1との接触点CPにおける各軸方向について下記数3および数4のごとき運動方程式が成立する。つまり、数1および数2における各パラメータを、粒状体M2に適したパラメータに変更すれば、粒状体M2について、粒状体M1との接触点CPの各軸方向について成立する運動方程式(数3、数4)を形成することができる。
なお、数3、数4では、数1、数2から、符号m1を符号m2(粒状体M2の質量)に、また、符号I1を符号I2(粒状体M2の慣性モーメント(=ρp8πr25/15、ρpは粒状体M2の密度、r2は粒状体M2の半径))に、符号η1,η2を符号η11,η22に、符号K1,K2を符号K11,K22に、符号f1,f2を符号f11,f22に変更している。
【0035】
【数3】
【数4】
【0036】
(網箱モデルの説明)
つぎに、網箱モデル10Aについて説明する。
じゃかご1における網箱10は、枠部11の棒状体11a、および網部12の線材12aから構成されている。つまり、網箱10は、線径は異なるものの、全て線材によって形成されている。
よって、本発明では、まず線材をモデル化し、この線材モデルを複数本の組み合わせて網箱10の形状を形成することによって、網箱モデル10Aを形成している。
【0037】
(線材モデルの説明)
まず、本発明の網箱モデル10Aにおいて採用した線材モデルLMを説明する。
【0038】
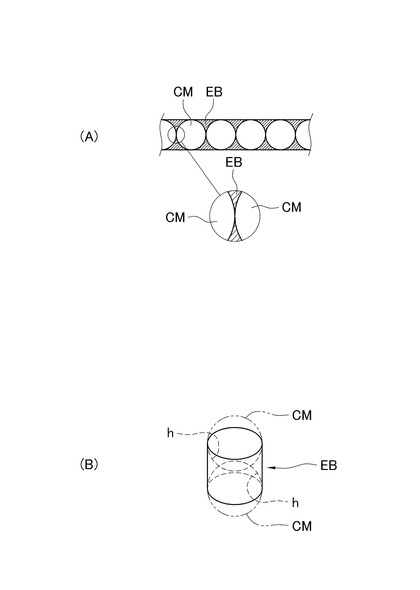
図5は(A)は線材モデルLMの概略拡大説明図であり、(B)は線材モデルLMを構成する連結部材EBの概略説明図である。同図に示すように、本発明では、線材をモデル化する際に通常使用される有限要素の方法(非特許文献1)ではなく、独自の方法で線材をモデル化している。具体的には、本発明の線材モデルLMは、線材の軸方向に沿って並んだ複数の粒子CMと、隣接する粒子CM間に配置された連結部材EBとから構成されたモデルとしている。
【0039】
(線材モデルの構造モデルの説明)
まず、線材モデルLMを構成する複数の粒子CMは、その直径がモデル化する各線材(棒状体11a、線材12a)の軸径と同じ長さである剛体球を仮定している。
なお、粒子CMは、剛体球とした以外は、線材の素材と同一の物性を有すると仮定している。つまり、粒子CMは、変形はしないが、その密度等の物性はモデル化する各線材と同等の物性を有すると仮定している。
【0040】
つぎに、連結部材EBは、弾性変形可能な要素であって、モデル化する各線材と同一の軸径の円筒を仮定している。しかも、この連結部材EBは、その軸方向の両端に粒子CMが配置される凹みhが形成されている。この凹みhは、粒子CMと同一半径の半球状の凹みである。そして、連結部材EBは、両端の凹みhにそれぞれ粒子CMが配置されたときに、隣接する粒子CM同士が点接触するように構成されている。
なお、連結部材EBは、粒子CMと同様に、線材の素材と同一の物性を有すると仮定しており、弾性変形が可能である点およびその形状以外は、粒子CMと実質的に同一の物性を有すると仮定している。
【0041】
(力学モデルの説明)
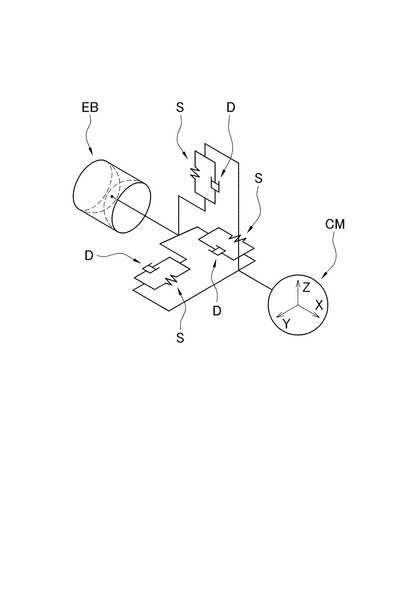
図6は隣接する粒子CMと連結部材EBとの間の接触点CPにおける力学モデルである。
本発明の線材モデルLMでは、線材モデルLMを構成する複数の粒子CMは、隣接する粒子CM同士が点接触しかつ粒子CM間で滑りが生じない接触条件を仮定している。
このため、本発明の線材モデルLMでは、隣接し点接触する粒子CM間の接触点における力学モデルとして、図4の力学モデルにおいて、Y軸、Z軸方向の力学モデル(図4(B)のモデル)が、図6に示すように、クーロンスライダCSを有しないモデルを採用している。なお、X軸方向の力学モデルは、図4(A)のモデルをそのまま採用している。
【0042】
一方、連結部材EBと粒子CM間では、連結部材EBの凹みhの内面と粒子CMの表面とが接着されている状態、言い換えれば、両表面の相対的な移動が固定された状態を仮定している。
このため、本発明の線材モデルLMでは、連結部材EBと粒子CMとの接触点における力学モデルとして、図6に示すように、ディバイダXやクーロンスライダCSを有しない、並列に配置された3つのフォークトモデルのみからなるモデルを採用している。
【0043】
具体的には、3つのフォークトモデルにおける各スプリングSの伸縮方向が、それぞれ、連結部材EBにおける凹みの内面の法線方向(X軸方向)および、この法線方向と直交する2軸(Y軸方向、Z軸方向)と平行になるように配設されたモデルを採用している。すると、接触点の力学モデルにおける各軸方向の伸縮のベクトル和が、接触点における連結部材EBの弾性変形を表現することになる。
【0044】
また、本発明の線材モデルLMでは、連結部材EBの凹みの内面と粒子CMの表面とが面接触する状態を仮定しているので、隣接する粒子CM間の接触点は一つであるが、粒子CMと連結部材EBとの接触点は無数に存在している。つまり、本発明の線材モデルLMは、両者の間に前記力学モデルが無数に存在しているモデルとなる。
すると、線材の断面における各部の弾性変形を、隣接する粒子CMと連結部材EBとの間に無数に存在する力学モデルによって表現することができるから、本発明の線材モデルLMでは、線材の曲げ撓みなどの変形を表現することができるのである。
【0045】
なお、本発明の線材モデルLMでは、連結部材EBの凹みの内面と粒子CMの表面とが面接触する状態を仮定しているので、接触点は無数に存在することになる。しかし、線材モデルLMの挙動解析を行う場合には、必要とする精度に応じて接触点数を適宜設定すればよい。
【0046】
また、本発明の線材モデルLMでは、連結部材EBの凹みの内面と粒子CMの表面とが面接触する状態を仮定しているので、粒子CM同士が点接触する位置では、粒子CM同士の点接触モデルと、連結部材EBと粒子CMとの面接触モデルがともに成立することとしている。このため、粒子CM同士が点接触する位置では、後述する粒子CMの接触点で成立する運動方程式と、後述する粒子CMと連結部材EBとの接触点で成立する運動方程式の両方が、ともに成立するのである。
【0047】
そして、本発明の線材モデルLMでは、粒子CM同士は常に接触した状態に保たれることを仮定している。このため、線材モデルLMを曲げ変形させた場合、粒子CM同士の相対的な位置の変化に伴って、粒子CM同士が点接触する位置が変化する。このとき、連結部材EBと粒子CMとは全面で面接触した状態にあるため、粒子CMの表面において連結部材EBと接触していた接触面に、粒子CM同士が点接触する位置が新たに現れることになる。つまり、線材モデルLMを曲げ変形させた場合には、変形による粒子CM同士の点接触する位置の変化に伴って、連結部材EBと粒子CMとの接触面の状況が変化する。
本発明では、線材モデルLMが破断しない限り、連結部材EBと粒子CMとが離間することはないものと仮定している。すなわち、連結部材EM、粒子CMの応力がともに破断応力に達しなければ、粒子CM同士が新たな位置(新接触点)で点接触しても、この新接触点においてもともと存在していた連結部材EBと粒子CMとの連結が切れることはないものと仮定している。このため、新接触点では、元々粒子CM同士が点接触していた位置と同様に、粒子CM同士の点接触モデルと、連結部材EBと粒子CMとの面接触モデルがともに成立する。
以上のごとく、本発明の線材モデルLMの解析では、線材モデルLMの変形状態、つまり、連結部材EBと粒子CMとの接触状況が変化するので、この接触状況が変化に応じて、接触点で成立する運動方程式も時々刻々と成立することになるのである。
【0048】
(運動方程式の説明)
線材モデルLMにおいて、上記のごとき力学モデルを採用した場合には、隣接する粒子CMの接触点CPにおける各軸方向について、前述した数1および数2と実質的に同一の運動方程式が成立する。つまり、数1および数2における各パラメータを、粒子CMに適したパラメータに変更すれば、隣接する粒子CMの接触点CPの各軸方向について成立する運動方程式を形成することができる。
【0049】
また、連結部材EBの凹みhの内面と粒子CMの表面の各接触点CPにおける各軸方向については、下記数5および数6がそれぞれ成立する。
【0050】
なお、下記数5および数6において、符号meは連結部材EBの質量、符号uは連結部材EBの粒子CMに対する並進変位、符号φは連結部材EBの粒子CMに対する回転変位、符号K3,K4は連結部材EBと粒子CMとの間のバネの弾性定数、符号η3,η4は連結部材EBと粒子CMとの間のダッシュポットの粘性係数、符号Ieは連結部材EBの慣性モーメントを示している。f3,f4はそれぞれ連結部材EBに粒子CMから加わるu,φ方向の力あるいは連結部材EBに直接加わる強制外力である。
また、バネの弾性定数K3,K4、ダッシュポットの粘性係数η3,η4は、接触点CPにおける各軸方向についてそれぞれ定められる。そして、これらの具体的な数値は、解析対象となる実際のじゃかごに使用される網部の線材の密度や剛性、摩擦係数、材料減衰の大きさ等に応じて設定する。
【0051】
【数5】
【数6】
【0052】
なお、粒子CMについても、連結部材EBとの接触点CPにおける各軸方向について、前述した数5および数6と実質的に同一の運動方程式が成立する。つまり、数5および数6における各パラメータを、粒子CMに適したパラメータに変更すれば、連結部材EBと隣接する粒子CMの接触点CPの各軸方向について成立する運動方程式を形成することができる。
【0053】
よって、各連結部材EBについて、粒子CMとの全接触点の各軸方向について成立する、数5、数6の運動方程式と、各粒子CMについて、隣接する粒子CMとの接触点および連結部材EBとの全接触点における各軸方向について成立する運動方程式を連立して解けば、各粒子CMの移動や各連結部材EBの変形を求めることができる。
【0054】
そして、線材モデルLMに対して力を加えたときにおける線材モデルLMの変形挙動は、その構成要素となる、全粒子CMの移動と全連結部材EBの変形が合成されたものであるので、全粒子CMの移動と全連結部材EBの変形を求めれば、線材モデルLMの変形挙動を求めることができる。
【0055】
また、上記のごとき粒子CMと連結部材EBからなる線材モデルLMは、じゃかごモデル1Aの網箱モデル10Aの解析に限られず、様々な解析に採用することができる。例えば、線材を構成要素に含む部材や、複数本の線材を束ねたケーブル等の変形解析に採用することができるし、単一線材の変形解析にも採用することができる。
【0056】
(網箱の線材同士の接触部分における力学モデルの説明)
本発明の網箱モデル10Aは、上記のごとき線材モデルLMを複数本組み合わせてその形状を形成するが、上述したように、じゃかご1の網箱10では、網部12の線材12a同士、または、線材12aと枠部11の棒状体11aとは、いずれも互いに係合しているだけであり、滑ったり接触離間したり引っ張り合ったりできる状態となっている。
このため、網箱モデル10Aでは、複数の線材モデルLMを組み合わせて形状を形成するとともに、線材モデルLM同士が接触する部分における相互作用もモデル化する必要がある。
【0057】
本発明では、網箱10の線材12aに、上述したような線材モデルLMを採用しているので、線材12a同士の相互作用を、異なる線材モデルLMを構成する要素(粒子CMおよび連結部材EB)間の相互作用としてモデル化することができる。
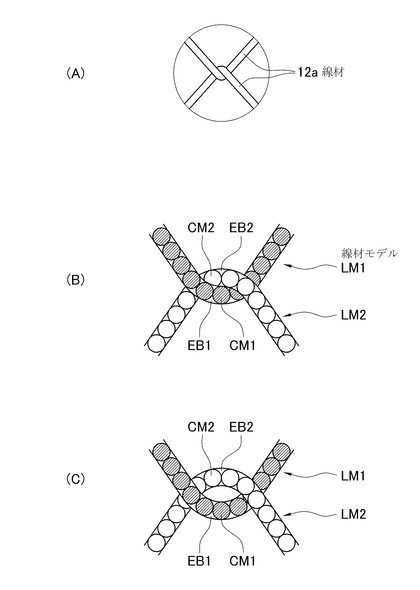
具体的には、図7に示すように、互いに係合している線材12a同士(図7(A))において、各線材12aを線材モデルLM1,LM2同士で表現すると、図7(B)のようになる。また、各線材12aが離間した状態、つまり、線材モデルLM1,LM2同士が離間した状態は、図7(C)のようになる。すると、線材モデルLM1,LM2間の相互作用は、線材モデルLM1,LM2を構成する要素同士が接触離間等する作用と実質的に同等と考えることができる。
【0058】
よって、線材モデルLM1,LM2を構成する要素間の力学モデルとして、前述した中詰材モデル5Aにおける隣接する粒状体M1,M2間の力学モデルを採用する。すると、実際の網部12の線材12a間に生じる線材12a同士の接触離間や相対的な滑りを、各線材12aに対応する線材モデルLMにおける要素間の相対的な移動として、網箱モデル10Aにおいて再現させることができる。
つまり、線材モデルLM1,LM2を構成する粒子CM間(例えば、粒子CM1と粒子CM2間)の力学モデル、線材モデルLM1,LM2を構成する連結部材EB間(例えば、連結部材EB1と連結部材EB2間)の力学モデル、または、線材モデルLM1,LM2を構成する連結部材EBと粒子CM間(例えば、連結部材EB1と粒子CM2間)の力学モデルに、前述した中詰材モデル5Aにおける隣接する粒状体M1,M2間の力学モデルを採用する。すると、各線材12aに対応する線材モデルLMにおける粒子CM間の相対的な移動、連結部材EB間の相対的な移動、および連結部材EBと粒子CMとの間の相対的な移動を合成することにより、実際の網部12の線材12a間に生じる線材12a同士の接触離間や相対的な滑りを、網箱モデル10Aにおいて再現させることができる。
【0059】
同様に、枠部11の棒状体11aと網部12の線材12aの相互作用についても、異なる線材モデルLMの要素間の相互作用としてモデル化できる。よって、実際の枠部11の棒状体11aと網部12の線材12aとの間に生じる相対的な滑りを、各線材12aの線材モデルLMにおける要素間の相対的な移動として、網箱モデル10Aに再現させることができる。
なお、網部12の線材12a同士は接触離間できるが、線材12aは枠部11の棒状体11aから離間することはできない。このため、棒状体11aと線材12aとの間の相互作用の力学モデルには、線材12a間の相互作用の力学モデルと異なり、X軸方向の力学モデルにおいてディバイダXを有しないモデルを採用する必要がある。
【0060】
(運動方程式の説明)
そして、線材12a同士の相互作用を、上記のごとくモデル化した場合には、隣接する線材モデルLMの粒子CM同士の各接触点における各軸方向について、数1および数2と同様の式がそれぞれ成立する。
ただし、パラメータm,η,K,Iならびに強制外力fは、異なる値(線材12aに適した値)となり、また、バネの弾性定数K、ダッシュポットの粘性係数ηは、数1、数2等と同様に、各軸方向についてそれぞれ定められる。そして、これらのパラメータの具体的な数値は、解析対象とする実際のじゃかごの網部の剛性、引張り強度、剪断強度、材料減衰の大きさ等に応じて設定する。
【0061】
同様に、隣接する線材モデルLMの連結部材EB間の各接触点、および、隣接する線材モデルLMにおける粒子CMと連結部材EBとの各接触点においても、各軸方向について数1および数2と同様の式がそれぞれ成立する。また、バネの弾性定数K、ダッシュポットの粘性係数ηは、数1、数2等と同様に、各軸方向についてそれぞれ定められる。そして、これらのパラメータの具体的な数値は、解析対象とする実際のじゃかごの網部の剛性、引張り強度、剪断強度、材料減衰の大きさ等に応じて設定する。
【0062】
以上のごとく、網箱モデル10Aは、粒子CMと連結部材EBからなる線材モデルLMを採用し、かつ、線材同士の接触状態を線材モデルLMにおける要素間の相互作用としてモデル化している。
このため、網箱モデル10Aに対して力を加えたときにおける網箱モデル10Aの変形挙動は、各線材モデルLMにおける粒子CMの移動および連結部材EBの変形(つまり、各線材モデルLMの変形)と、異なる線材モデルLMの構成要素であってかつ互いに隣接する要素間の相対的な移動(つまり、隣接する線材モデルLM同士の相対的な移動)が合成されたものとなる。
よって、全ての線材モデルLMにおける粒子CMの移動および連結部材EBの変形と、異なる線材モデルLMの構成要素であってかつ隣接する要素間の相対的な移動とを求めれば、網箱モデル10Aの変形挙動を求めることができる。
【0063】
(モデル同士が接触する部分の力学モデルの説明)
また、じゃかご1は、中詰材5の石材5aを網箱10内に収容した構造であるから、石材5aと網箱10を構成する各線材(棒状体11a、線材12a)も接触している。つまり、一方の動きが他方にも影響を与える関係にあるから、石材5aと網箱10を構成する各線材との相互作用についてもモデル化する必要がある。
【0064】
上述したように、本発明では、じゃかごモデル1Aを構成する中詰材モデル5Aおよび、網箱モデル10Aを構成する線材モデルLMが、いずれも複数の粒状体(中詰材モデル5Aでは粒状体M、線材モデルLMでは粒子CMおよび連結部材EM)を有するモデルを採用している。
このため、石材5aと網箱10を構成する各線材との相互作用は、中詰材モデル5Aの粒状体Mと、線材モデルLMの要素(粒子CMまたは連結部材EM)との間における相互作用としてモデル化することができる。
本発明では、両者間の相互作用の力学モデルに、前述した中詰材モデル5Aにおける隣接する粒状体M1,M2間の力学モデルと同等のモデルを採用している。
【0065】
かかる力学モデルを採用すれば、実際の中詰材5の石材5aと網箱10の各線材間に生じる相互作用(接触離間や相対的な滑り)を、中詰材モデル5Aの粒状体Mと線材モデルLMの要素の相対的な移動として、じゃかごモデル1Aにおいて再現させることができる。
【0066】
しかも、網箱モデル10Aは線材モデルLMの組み合わせで形成されているので、各線材モデルLMは撓んだり屈曲したりできる。しかも、線材モデルLMで囲まれた空間(網の目に相当する)は何もない空間として網箱モデル10Aに再現されている。
このため、本発明のじゃかごモデル1Aでは、実際のじゃかご1において石材5aが網箱10の網部12の目を広げながら外部に孕みだす状態、つまり、石材5aが網部12の空間から外部に突出するような状態も再現することができる。例えば、解析結果として、中詰材モデル5Aの粒状体Mの一部が、線材モデルLMで囲まれた空間を広げてその空間から外部に突出した状態を得ることができるのである。
【0067】
(運動方程式の説明)
そして、中詰材モデル5Aの粒状体Mと線材モデルLMの要素の相対的な移動は、粒状体Mと要素との各接触点における各軸方向について、数1および数2と同様の式がそれぞれ成立する。
ただし、パラメータm,η,K,Iならびに強制外力fは、異なる値(粒状体Mと線材12aとの相互作用に適した値)となり、また、バネの弾性定数K、ダッシュポットの粘性係数ηは、数1、数2等と同様に、各軸方向についてそれぞれ定められる。そして、これらのパラメータの具体的な数値は、解析対象とする実際のじゃかごの中詰材および網部の特性(剛性、引張り強度、剪断強度、材料減衰の大きさ等)に応じて設定する。
【0068】
本発明のじゃかごモデル1Aは、以上のごとくモデル化されているので、中詰材モデル5Aの粒状体Mの運動、網箱モデル10Aにおける線材モデルLMの連結部材EBの変形、異なる線材モデルLMの構成要素であってかつ隣接する要素間の相対的な移動、および、中詰材モデル5Aの粒状体Mと網箱モデル10Aにおける線材モデルLMの要素との間の相対的な移動が合成されたものとなる。
よって、中詰材モデル5Aの全ての粒状体Mの運動、全ての線材モデルLMにおける全ての連結部材EBの変形、異なる線材モデルLMの構成要素であってかつ隣接する要素間の相対的な移動、中詰材モデル5Aの粒状体Mと線材モデルLMの要素との間の相対的な移動を求めれば、じゃかごモデル1Aの変形挙動を求めることができる。
【0069】
(じゃかごモデルの挙動解析)
上述したようなじゃかごモデル1Aを用いた挙動解析では、前記運動方程式を連立して解くことによって、中詰材モデル5Aの全ての粒状体Mの運動、全ての線材モデルLMにおける全ての連結部材EBの変形、異なる線材モデルLMの構成要素であってかつ隣接する要素間の相対的な移動、中詰材モデル5Aの粒状体Mと線材モデルLMの要素との間の相対的な移動が算出できる。
【0070】
ここで、上述した前記運動方程式を連立して解くためには、まず、(1)中詰材モデル5Aではどの粒状体M同士が接触しているか、(2)網箱モデル10Aの異なる線材モデルLM間においてどの要素同士が接触しているか、(3)中詰材モデル5Aにおけるどの粒状体Mと、網箱モデル10Aにおける線材モデルLMのどの要素とが接触しているか、をそれぞれ求める必要がある。
【0071】
そして、じゃかごモデル1Aに加える外部入力を与えて、接触している粒状体M同士間の運動方程式、線材モデルLMにおける粒子CMと連結部材EB間の運動方程式、異なる線材モデルLMの構成要素であってかつ隣接する要素間の運動方程式、および接触している粒状体Mと線材モデルLMの要素との間の運動方程式、を連立して解く。すると、外部入力が加わったときにおけるじゃかごモデル1Aの挙動を得ることができる。
【0072】
(接触判定)
つぎに、粒状体M同士等が接触しているか否かについて判断する接触判定について説明する。
なお、中詰材モデル5Aにおける粒状体M同士の接触判定、異なる線材モデルLMに属する粒子CM間の接触判定、中詰材モデル5Aにおける粒状体Mと線材モデルLMにおける要素との接触判定は、いずれも実質的に同じ方法で接触判定が行われる。よって、以下では、代表として、図3に基づき、中詰材モデル5Aにおける粒状体M同士の接触判定を説明する。
【0073】
図3における2つの粒状体M1,M2間の接触判定を考える。時刻tにおける粒状体M1,M2の中心O1,O2の座標をそれぞれO1(xi,yi,zi),O2(xj,yj,zj),半径をri,rjとすると、粒状体M1,M2の接触判定条件は数7で表される。すなわち、数7が成り立つとき、2つの粒状体M1,M2は非接触状態にある。そうでないときには接触状態になる。
【数7】
【0074】
よって、上記数7による接触判定を、全ての中詰材モデル5Aにおける粒状体Mおよび、全ての線材モデルLMにおける要素について行えば、連立して解くべき運動方程式を求めることができる。
【0075】
また、接触判定を行う要素が連結部材EBの場合には、連結部材EBが球形でないため、上記数7に代えて、以下の数8を採用する必要がある。つまり、粒状体Mの中心Oの座標をO(xk,yk,zk),半径をrk、連結部材EBの外周部の任意座標をP(xl,yl,zl)とすると、数8が成り立つとき、粒状体Mと連結部材EBは非接触状態にある。そうでないときには接触状態になる。この判定は連結部材EBの外周部全体にわたって実施される。
【0076】
【数8】
【0077】
なお、連結部材EB同士の接触判定には、以下の数9を採用する必要がある。つまり、時刻tにおける線材モデルLM1における粒状体CM1同士の接触点、線材モデルLM2における粒状体CM2同士の接触点の中心O1,O2の座標をそれぞれO1(xmc,ymc,zmc),O2(xnc,ync,znc),線材モデルLM1、LM2における粒状体CM1、CM2の半径をそれぞれrmc,rnc、線材モデルLM1、LM2における連結部材EB1,EB2の外周部の任意座標をそれぞれP(xml,yml,zml), P(xnl,ynl,znl)とすると、数9が成り立つとき、連結部材EB1と連結部材EB2は非接触状態にある。そうでないときには接触状態になる。この判定は連結部材EB1, EB2の外周部全体にわたって実施される。
【数9】
【0078】
また、線材モデルLMを用いて単一線材(一本の線材)の変形解析を行う場合には、線材が破断しなければ粒子CMと連結部材EBとが離間することがない。よって、単一線材の変形解析において、線材が破断するまでの解析を行わないのであれば、接触判定は不要である。
【0079】
(挙動解析)
じゃかご1では、中詰材5の各石材5aは、複数の石材5aや、網箱10における枠部11の複数の棒状体11aや、網部12の複数の線材12aと接触している。すると、本発明のじゃかごモデル1Aの場合、一つの粒状体Mまたは一つの粒子CMは、他の複数の粒状体Mや複数の粒子CMと接触しているので(図3(A)参照)、個々の接触点に対して上記運動方程式が成立する。
このため、一の粒状体M等と他の粒状体M等との間に成立する全ての運動方程式を連立して解けば、一つの粒状体M等の運動を把握することができる。そして、じゃかごモデル1Aを構成する全ての粒状体M等について成立する全ての運動方程式を連立して解けば、じゃかごモデル1Aの挙動を把握することができる。
【0080】
(差分解析)
ここで、じゃかごモデル1Aは、非常に多数の粒状体M等を有しているので、じゃかごモデル1Aの挙動を把握するには、非常に膨大な数の運動方程式を連立して解かなければならない。すると、計算時間が長くなる。
【0081】
そこで、かかる問題を解消するために、本発明では、じゃかごモデル1Aの挙動解析に、個別要素法で採用される差分近似による解析を採用している。具体的には、上述したような運動方程式について、時間増分Δtで差分近似して計算する方法を採用している。かかる差分近似による計算では、時間領域でステップ・バイ・ステップに前進的に方程式を解いていく。つまり、運動方程式を前進解法で解くため、運動方程式を連立して解く必要がない。すると、粒状体M等の数が多くなっても、運動方程式を解く他の方法に比べて計算時間を短くできる。
【0082】
例えば、上述した粒状体M1に成立する運動方程式(数1)であれば、下記数10のように時間増分Δtで差分近似して計算することができる。
【数10】
すると、粒状体M1の新しい時刻tにおける粒状体M2に対する相対的な加速度は、時刻Δtだけ前の粒状体M2に対する相対的な変位と粒状体M2に対する相対的な速度から得られるし、新しい時刻tにおける加速度を数値積分すると、時刻tにおける変位と速度が得られる。よって、この計算を時刻刻みΔtで繰り返せば、粒状体M1の粒状体M2に対する相対的な運動軌跡を計算することができる。
【実施例1】
【0083】
(線材モデルによる解析の検証)
線材の変形解析において、本発明の線材モデルが有効であることを確認するために、本発明の線材モデルによってモデル化した梁の荷重変形解析結果を、梁の荷重変形の理論解と比較した。解析は、片持ち梁に対してその先端に集中荷重と曲げモーメントを加えた場合における梁の変形(図8)と、単純梁に対してその中央部に集中荷重を加えた場合における梁の変形(図9)について行った。
【0084】
梁の変形は、z方向のたわみδz、y軸(図8、図9の紙面に垂直な方向)回りの回転角(たわみ角)θy、x軸回りの回転角(ねじり角)θxによって評価した。
【0085】
理論解において、上記δz、θy、θxは、以下の数11〜14から算出している。
(1)片持ち梁
【数11】
【数12】
【数13】
(2)単純梁
【数14】
なお、以下に、上記数における各符号を説明する。
P:z方向の集中荷重
My:y軸回りの曲げモーメント
Mx:x軸回りのねじりモーメント
EI:曲げ剛性
GJ:ねじり剛性
L:スパン長
x:図8、図9に示すx軸における梁の位置
【0086】
また、梁は、断面円形、軸径D508mm、長さL5080mmのアルミニウム製の梁を仮定しており、解析では、バネの弾性定数Kは2.26×1012N/mとした。ただし、ダッシュポットの粘性定数ηについては考慮していない。
また、理論解の算出において、P、My、Mx、EI、GJには、以下の値を使用した。
P=1.78×106N
My=1.13×104N・m
Mx=2.26×105N・m
EI=2.25×108N・m2
GJ=1.69×108N・m2
【0087】
(結果の比較)
(1)片持ち梁
まず、図8に示すように、本発明の線材モデルでも、片持ち梁が撓む状況を再現できることが確認できた。
そして、片持ち梁については、壁面からの距離が、1016mm(Aの位置)、3048mm(Bの位置)、5080mm(Cの位置)の各位置について、上記δz、θy、θxを比較した。
図10に示すように、作用荷重として、P、My、Mxを全て加えた場合、Pのみを加えた場合、Myのみを加えた場合のいずれも、解析により得られるδz、θy、θxの値(シミュレーション解)は、理論解とほぼ一致した。
(2)単純梁
単純梁については、作用荷重として、その中央部に集中荷重Pを加えた場合のみを解析したが、図9に示すように、片持ち梁と同様に、本発明の線材モデルでも、単純梁が撓む状況を再現できることが確認できた。
しかも、図10に示すように、解析により得られるδz、θy、θxの値は、理論解とほぼ一致した。
【0088】
以上の解析結果から、本発明の線材モデルLM、および、この線材モデルLMの採用した個別要素法による挙動解析は、梁のように撓んだりする棒状の部材の解析に妥当な手法であることが確認できる。
【実施例2】
【0089】
(じゃかごモデルによる解析の検証)
本発明のじゃかごモデルを用いて、じゃかごに荷重・振動を加えた場合における変形挙動を解析し、実際のじゃかごを用いた載荷・共振試験の結果と対比・検討を行った。
【0090】
(載荷試験)
じゃかごの載荷試験は、試験機として加力載荷装置(鷺宮製作所製、Model2810)を用い、載荷板を介して、じゃかごをその上面から鉛直下向きに載荷速度0.5mm/sとなるように圧縮して、載荷加重と鉛直変位を測定した。なお、載荷加重と鉛直変位は、試験機によって測定した。
実験に使用した試験機は、最大荷重100kN,最大ストローク200mmのスペックを有する。
実験に使用したじゃかごは、大きさは500×800×800mmであり、中詰材には香川県産花崗岩を使用し、網箱は、亜鉛めっき線(SWMGH−3、線径4mm)から形成されたものを使用した。
【0091】
(共振試験)
また、じゃかごの共振試験は、振動実験機(IMV(株)製、DS−12500−25L)の加振テーブル上にじゃかごを設置して加振し、各部の加速度を求めた。
実験に使用した振動実験機のスペックは、2500×2500mmの寸法で、最大搭載荷重4000kg(加振テーブル質量含む)、正弦波加振時の最大加速度10.2m/s2(4000kg負荷時)、最大速度0.7m/s、最大変位100mm、振動数範囲1〜100Hzである。
実験条件(加振条件)は、正弦波加振の掃引試験で、掃引条件として振動数範囲1〜50Hz、加速度1m/s2、掃引速度1oct/minとした。
実験に使用したじゃかごは、大きさは500×1200×2000mmであり、中詰材には玉石、割ぐり石(充填率約65%)を使用しており、網箱は、亜鉛めっき線(SWMGH−3、線径4mm)から形成されたものを使用した。
そして、じゃかご各部の加速度は、加速度センサ(共和電業(株)製、AS−5GB、AS−20GB)を、石、金網、加振テーブルにそれぞれ取り付けて測定した。
【0092】
(じゃかごモデル)
じゃかごモデルは、その大きさ(網箱の大きさ)を500×1200×2000mm、つまり、共振試験に使用したじゃかごと同じ大きさにしている。
【0093】
中詰材モデルは、充填率約65%となるように、12〜15cmの異なる粒径の粒状体をランダムに発生させて形成した。なお、粒状体の素材は、花崗岩の玉石としている。
ただし、中詰材モデルの粒状体には、実際のじゃかごの中詰材として使用する石に起こりうる亀裂や破壊などの現象は反映させていない。つまり、粒状体は、変形が生じないものとしている。
【0094】
また、網箱モデルは、枠部を構成する線材の線径を4mm、網部を構成する線材の線径を4mm、網部の網目は13cmとした。なお、枠部および網部を構成する線材の素材は、亜鉛めっき鉄線としている。
【0095】
そして、中詰材モデルと網箱モデルの結合したじゃかごモデルは、以下のようにして形成した。
まず、網箱と同じ寸法の剛体壁の箱を生成し、その内側に最小粒径の粒状体よりも小さい半径の粒状体(粒径が12cm以下の粒状体)からなる中詰石モデルを発生させる。次に、設定した充填率(65%)になるまで粒状体の粒子半径をランダムに増加させる。この状態では、モデルにおける粒状体は互いに接触しているが重力が加わっていない状態、つまり、各粒状体が空中に浮いている状態と同等の状態であるので、充填率が65%となった段階でモデルにおける粒状体に対して重力加速度を与える。すると、粒状体は、重力によって粒状体同士が相互に力を及ぼしあいながら落下するように移動する。このとき、粒状体は剛体壁の箱内に収容されており、その動きが剛体壁に制限されるので、時間の経過とともに粒状体の動きが少なくなり、やがて、全ての粒状体が静止する安定状態(粒状体の速度が0になる状態)となる。この状態まで計算を行う。
その後、剛体壁の箱を網箱モデルに置き換える。すると、網箱モデルでは、剛体壁には存在しない網目が存在するので、粒状体と網箱モデルとの接触状態は、剛体壁の箱と粒状体との接触状態と異なった状態となる。すると、剛体壁の箱を網箱モデルに置き換えてから、再び粒状体に重力を加えると、粒状体は安定状態になるように移動するから、再びモデル全体の粒子が静止した安定状態になるまで計算する。
すると、網箱に石が詰められた実際のじゃかごと近似したじゃかごモデルを形成することができる。
【0096】
(載荷解析条件)
じゃかごの圧縮解析を行うため、側面は拘束せず、上下面に剛な板を生成した。上面の板に鉛直下向きの速度を付与し、解析によって載荷荷重と鉛直変位の関係を求めた。ここでは計算時間の都合上、じゃかご上面の鉛直変位が65mmに達するまで解析を行った。
【0097】
(共振解析条件)
じゃかごの共振解析では、線材を粒子によってモデル化しているので粒子サイズが非常に小さくなる。すると、粒子サイズの影響から計算時間間隔が極めて小さくなり、現実的な時間で実地震波による耐震解析を行うことは容易でない。そこで、弱軸方向(短軸方向)への入力波として共振周波数に近い周波数よりなる調和波を与えた解析を実施した。 なお、入力波は、前述したじゃかごの共振試験の結果を勘案して、最大速度30kine、周波数20Hzの調和波とした。
【0098】
上記の載荷解析および共振解析は、解析ソフトPFC3D(Itasca製)を使用して行った。
各運動方程式におけるバネの弾性定数Kやダッシュポットの粘性定数ηは、中詰材の石材(花崗岩の玉石)や網箱の金網の(線材)の材料試験(引張試験)の結果、じゃかごの縮小模型における載荷試験の結果に基づいて定めた。各パラメータの値は、それぞれ中詰材のバネの弾性定数をK=2.0×109N/m、線材のバネの弾性係数をK=2.5×106N/mとし、線材の引張強度をσn=5.78×108N/m2、剪断強度をσs=2.28×108N/m2とした。また、既往の研究成果を参考にして、減衰定数をh=0.05、摩擦係数をμ=0.85とした。なお、粘性係数ηは、減衰定数より公知の方法により求めることができる。
【0099】
つぎに、実験結果と解析結果を比較する。
【0100】
(載荷実験結果と載荷解析結果の比較)
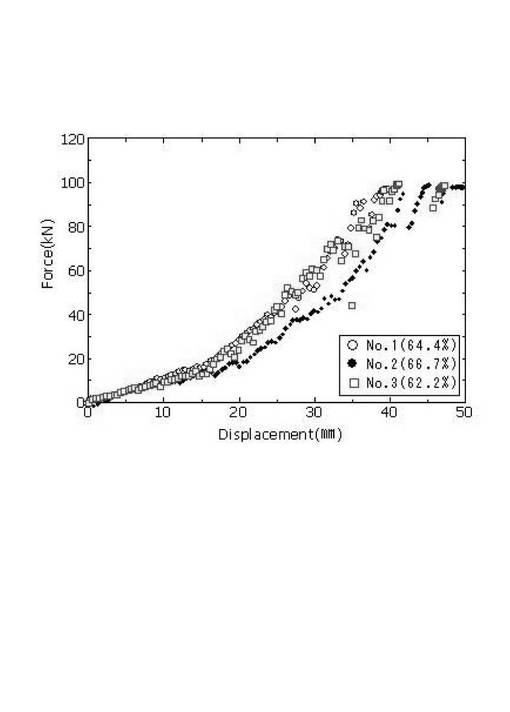
図11は、載荷実験を3回行ったときにおけるじゃかごの上面中央部における荷重−変位曲線を示している。
図11に示すように、載荷実験で得られる荷重−変位曲線では、じゃかごがほぼ弾性的な挙動を示すことが確認できる。
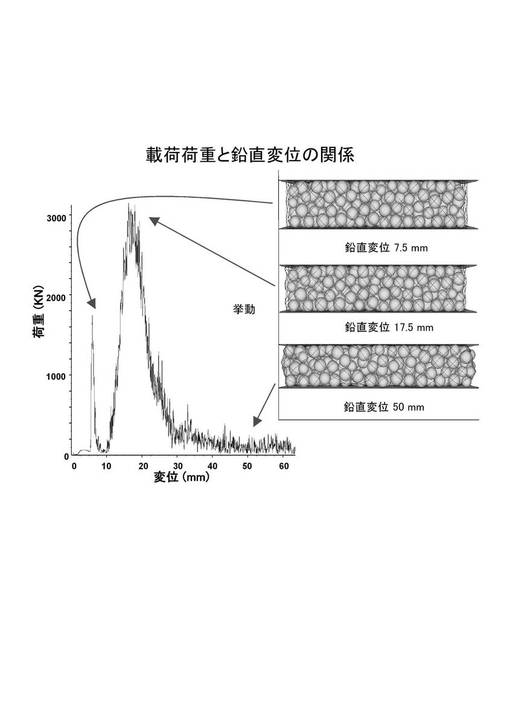
一方、図12は、じゃかごの上面中央部における荷重−変位曲線の解析結果であるが、載荷解析鉛直変位が7.5mmと17.5mm 付近で、曲線に大きな変化が見られる。これは、圧縮により石の配置が変化するとともに、金網かごの変形に伴い、石が外側へ孕み出すことによって強度が減少したことに起因している。大きな圧縮荷重を与えても、金網は破断することなく、じゃかごが正常に機能していることが理解できる。この結果は試験結果とよく対応している。
【0101】
(共振実験結果と共振解析結果の比較)
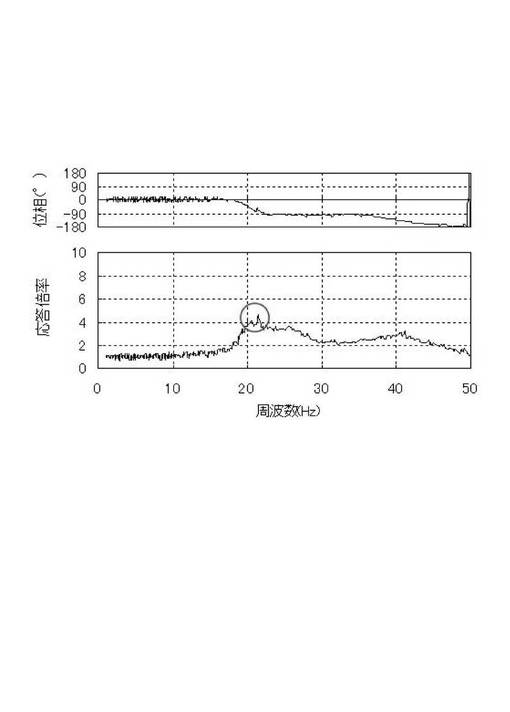
図13は、じゃかごの上面中央部における共振実験の測定結果を示している。図13に示すように、じゃかごの共振周波数が20Hz付近にあることがわかる。この共振周波数は一般的に見られる実地震波の卓越周波数よりもかなり高周波であり、じゃかごが実地震波と共振する可能性が極めて低く、耐震性に優れていることが確認できる。
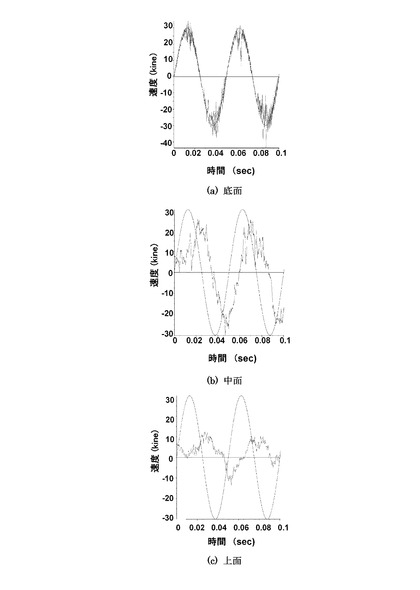
図14は、共振解析におけるじゃかごの底面、中面、上面のそれぞれの中央部における速度応答の解析結果を示しており、上方ほど速度応答の振幅が入力速度振幅よりも小さくなる傾向が見られる。この共振解析のじゃかごモデルでは、その共振周波数が必ずしも共振実験の結果として得られた共振周波数に対応していない。しかし、共振実験においても、共振解析の結果として得られた、中詰材の速度が入力速度振幅よりも小さくなる状態が見られている。そして、図示していなが、線材の部分でも同様の効果が得られているので、モデル化は大過ないと言える。
【0102】
以上の解析結果から、本発明のじゃかごモデル、および、このじゃかごモデルを採用した個別要素法による挙動解析は、実際のじゃかごの挙動特性の解析に妥当な手法であることが確認できる。
【産業上の利用可能性】
【0103】
本発明のじゃかごの解析モデルは、じゃかごの力学特性、耐震機能などの性能を定量的に解明するモデルとして適している。
また、線材の解析モデルは、鋼線等の線材や、かかる線材を構成要素とする部材の挙動解析や変形解析に使用するモデルとして適している。
【符号の説明】
【0104】
1 じゃかご
5 中詰材
5a 石材
10 網箱
11 枠部
11a 棒状体
12 網部
12a 線材
M 粒状体
CM 粒子
EB 連結部材
1A じゃかごモデル
5A 中詰材モデル
10A 網箱モデル
LM 線材モデル
【技術分野】
【0001】
本発明は、じゃかごの解析モデル、じゃかごの挙動解析方法、線材の解析モデルおよび線材の変形解析方法に関する。
じゃかごとは、金網等を箱状に組み立てたかご等の中に、石材(中詰材)を充填した構造を有するものであり、河川護岸や擁壁などに用いられている。かかるじゃかごを利用した工法は、経験に依存した伝統的工法であるため、これまで学術上の理論的評価が行われておらず、資材としてのじゃかごの価値を高めるためには、力学特性、耐震機能などの性能を定量的に解明する必要がある
本発明は、かかるじゃかごの力学特性、耐震機能などの性能を定量的に解明するために使用されるじゃかごの解析モデル、じゃかごの挙動解析方法、線材の解析モデルおよび線材の変形解析方法に関する。
【背景技術】
【0002】
じゃかごは、金網等を箱状に組み立てたかご等の中に石材(中詰材)を充填して形成されており、かご等と中詰材、また、中詰材同士が相互に影響しあって変形したり相対的な位置を変えたりするので、その力学挙動は複雑で未解明な点が多い。また、じゃかごは、その力学挙動を実験により把握しようとしても、力を加えたときの変形等を外部から観察することはできても、中詰材とかご等との間においてどのように力が伝達されているかなどについて、詳細を知ることが難しい。
したがって、じゃかごの力学挙動を把握する上では、数値解析モデルを用いた検討が有効な手段となり得ることから、適切なモデルの検討が行われている(例えば、非特許文献1、2)。
【0003】
非特許文献1では、中詰材を粒状体としてモデル化した鋼製組立網(じゃかご)全体系の連成解析手法が提案されている。この非特許文献1では、中詰材は粒状体としてモデル化しているが、鋼製網枠を構成する金網・丸棒には弾塑性有限要素法による離散近似モデルを適用し、金網は曲げ剛性を持たない弾塑性膜要素(3節点三角形要素)でモデル化している。
具体的には、金網には菱形金網を採用し、三角形要素の膜構造モデルを適用しており、金網を構成する列線の曲げ剛性は回転バネでモデル化するとともに、接合点には接触バネを導入している。また、丸棒ははり要素によりモデル化している。中詰材は粒状体でモデル化し、ボクセル球を用いた形状近似により、多面体で表現している。
【0004】
また、非特許文献2では、個別要素法を用いて中詰材を粒状体(球、楕円、立方体)によってモデル化し、金網については接合点に粒状体モデルを導入している。そして、接合点の粒状体に金網の鉄線に関する力−変形関係(弾塑性関係)を与え、金網の鉄線の動きを見かけ上表現できるようなアルゴリズムを構築している。
【0005】
しかるに、非特許文献1では、1)三角形要素によるモデル化、2)膜構造モデルの適用、3)曲げ剛性の無視、4)一要素による金網・丸棒のモデル化を行っているので、金網は現実的なモデルとなっていない。このため、金網の変形特性・力学特性を正確に検討することができない。例えば、じゃかごでは、地震のように大きな外力を受けると、中詰材が金網に接触し、金網から中詰材が孕み出す状況になる。しかし、非特許文献1では、膜構造モデルを採用した結果、こうした挙動を再現することは極めて困難であるから、中詰材と金網の連成挙動を正確に捉えることはできない。
【0006】
一方、非特許文献2では、非特許文献1と異なり金網を膜構造でモデル化していないので、金網から中詰材が孕み出すような状況を再現できる。しかし、非特許文献2のモデルでは、金網の接合点には金網の鉄線の力−変形関係が付与されているものの、金網自体には変形性能が与えられていないので、金網を構成する鉄線が撓むことはない。こうした挙動は、金網の現実の変形挙動とはかけ離れており、金網の力学挙動を正確に知ることはできない。
【0007】
以上のごとく、現在のところ金網と中詰材の連成挙動を正確に解明できるモデルや解析方法は開発されておらず、じゃかごの変形・力学特性を解明する適切なモデルや解析手法が求められている。
【先行技術文献】
【非特許文献】
【0008】
【非特許文献1】阿部和久・細谷栄作・小関徹:中詰材に粒状体モデルを用いた鋼製組立網の変形解析、計算数理工学論文集、Vol.5、pp.13-18、2005年6月.
【非特許文献2】Bertrand, D.,Gotteland, P.,Lambert, S.,Nicot, F.,Derache,F.: A multiscale mechanical modelling of unusual geocomposite material for rockfall impact, Proc. 9th Int. Congr. NUMOG, pp.709-716,2004.
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は上記事情に鑑み、鋼製枠、金網と中詰材(石材)で構成されたじゃかごの力学的・耐震的挙動を正確に解明できるじゃかごの解析モデルおよびじゃかごの挙動解析方法を提供することを目的とする。
また、曲げモーメントが加わったときにおける線材の変形を解明できる線材の解析モデルおよび変形解析方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
(じゃかごの解析モデル)
第1発明のじゃかごの解析モデルは、網状部材によって形成される収容体と、該収容体内に収容された中詰材とからなるじゃかごの解析モデルであって、前記中詰材には、複数の粒状体からなるモデルを採用しており、前記収容体の網状部材には、該網状部材を形成する線材が、その構成要素として、該線材の軸方向に沿って並んで配設された複数の粒子と、該複数の粒子における隣接する粒子間に該粒子間の隙間を埋めるように設けられた連結部材とを有するモデルを採用しており、前記中詰材の隣接する粒状体間には、該粒状体間の滑りおよび接触離間を考慮した接触条件を採用し、前記網状部材を形成する同一の線材中の隣接する粒子間には、該粒子同士が常に接触した状態に保たれかつ該粒子間で滑りが生じない接触条件を採用し、前記網状部材を形成する同一の線材中の連結部材と粒子との間には、両者の間で滑りが生じずかつ離間しない接触条件を採用し、前記網状部材を形成する線材のうち、異なる線材中の構成要素間には、該構成要素間の滑りおよび接触離間を考慮した接触条件を採用し、前記中詰材の粒状体と前記収容体の線材を構成する構成要素との間には、両者間の滑りおよび接触離間を考慮した接触条件を採用していることを特徴とする。
第2発明のじゃかごの解析モデルは、第1発明において、前記網状部材を形成する線材において、前記複数の粒子における隣接する粒子同士は点接触し、前記粒子と前記連結部材との間は面接触する接触条件を採用していることを特徴とする。
(じゃかごの挙動解析方法)
第3発明のじゃかごの挙動解析方法は、第1または第2発明のじゃかごの解析モデルを用いて、個別要素法 によるシミュレーションによりじゃかごの挙動を求めることを特徴とする。
第4発明のじゃかごの挙動解析方法は、第3発明において、前記収容体の上面および/または下面、および/または前記収容体の側面に位置する前記網状部材の変形過程を、拘束または非拘束の条件においてシミュレーションすることを特徴とする。
(線材の解析モデル)
第5発明の線材の解析モデルは、軸方向に長い線材の解析モデルであって、該線材に、該線材の軸方向に沿って並んで配設された複数の粒子と、該複数の粒子における隣接する粒子間に、該粒子間の隙間を埋めるように設けられた連結部材と、によって構成されたモデルを採用しており、前記複数の粒子における隣接する粒子間には、該粒子同士が常に接触した状態に保たれかつ該粒子間で滑りが生じない接触条件を採用し、前記連結部材と前記粒子との間には、両者の間で滑りが生じない接触条件を採用していることを特徴とする。
第6発明の線材の解析モデルは、第5発明において、前記複数の粒子における隣接する粒子同士は点接触し、前記粒子と前記連結部材との間は面接触する接触条件を採用していることを特徴とする。
(線材の解析手法)
第7発明の線材の変形解析方法は、第5または第6発明の解析モデルを用いて、個別要素法 によるシミュレーションにより線材の変形を求めることを特徴とする。
【発明の効果】
【0011】
(じゃかごの解析モデル)
第1発明によれば、中詰材を複数の粒状体でモデル化し、網状部材の線材は複数の粒子と複数の粒子間に配置された連結部材によってモデル化しているので、網状部材から中詰材が孕み出すような状況であっても再現できる。しかも、網状部材の線材を複数の粒子と連結部材とからなるモデルとしたことによって、網状部材の線材自体の変形も再現できる。そして、線材を構成する隣接する粒子間では粒子同士が常に接触した状態に保たれかつ滑りが生じない接触条件を採用し、かつ、粒子と連結部材との間では滑りが生じずかつ離間しない接触条件を採用しているので、線材の曲げや撓み等をより現実の変形挙動に近い状態で再現でき、線材の変形が現実の変形挙動と乖離したものとなること防ぐことができる。
第2発明によれば、隣接する粒子同士を点接触させかつ粒子と連結部材とは面接触させた状態でモデル化しているので、線材の曲げや撓み等をより現実の変形挙動に近い状態で再現できる。
(じゃかごの挙動解析方法)
第3発明によれば、第1または第2発明の解析モデルを用いて、個別要素法によりじゃかごの変形挙動を計算しているので、網状部材から中詰材が孕み出すような状況や網状部材の線材自体の変形も再現することができる。よって、計算によって再現される中詰材の挙動や網状部材の変形挙動をより現実の挙動に近づけることができるから、じゃかごを構成する中詰材や網状部材の力学挙動を正確に把握することができる。
第4発明によれば、積層された状態でのじゃかごの挙動を把握することができるので、実際に施工された状態におけるじゃかごを構成する中詰材や網状部材の力学挙動を把握することができる。
(線材の解析モデル)
第5発明によれば、複数の粒子とこの粒子同士の間に配置された連結部材とによって線材をモデル化しており、しかも、線材を構成する隣接する粒子間では粒子同士が常に接触した状態に保たれかつ粒子と連結部材との間では滑りが生じずかつ離間しない接触条件を採用している。よって、線材に曲げモーメントが加わった場合でも、線材の曲げや撓み等をより現実の変形挙動に近い状態で再現できる。
第6発明によれば、隣接する粒子同士を点接触させかつ粒子と連結部材とは面接触させた状態でモデル化しているので、線材の曲げや撓み等をより現実の変形挙動に近い状態で再現できる。
(線材の挙動解析方法)
第7発明によれば、第5または第6発明の解析モデルを用いて、個別要素法により線材の変形挙動を計算しているので、線材の曲げや撓み等をより現実の変形挙動に近い状態で再現できる。よって、計算によって再現される線材の変形挙動をより現実の挙動に近づけることができるから、線材の力学挙動を正確に把握することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の対象となるじゃかご1の概略説明図であって、(A)は外観の斜視図であり、(B)は網箱10の部分概略拡大図である。
【図2】本発明のじゃかごモデル1Aの概略説明図である。
【図3】(A)は中詰材モデル5Aの部分拡大図であり、(B)は隣接する粒状体M1,M2間の接触点CPにおける座標軸を説明した図である。
【図4】(A)は隣接する粒状体M1,M2間の接触点CPにおけるX軸方向の力学モデルであり、(B)は隣接する粒状体M1,M2間の接触点CPにおけるY軸およびZ軸方向の力学モデルである。
【図5】(A)は線材モデルLMの概略拡大説明図であり、(B)は線材モデルLMを構成する連結部材EBの概略説明図である。
【図6】隣接する粒子CMと連結部材EBとの間の接触点CPにおける力学モデルである。
【図7】(A)は線材12aの屈曲部12b同士が係合している部分の拡大説明図であり、(B)は(A)の状態を線材モデルLMによって表現した概略図であり、(C)は(A)の状態から線材12aの屈曲部12b同士が離間した状態を線材モデルLMで表現した概略図である。
【図8】(A)は片持ち梁の概略説明図であり、(B)は本発明の線材モデルLMによってモデル化した片持ち梁モデルの概略図であり、(C)は片持ち梁モデルの先端に集中荷重と曲げモーメントを加えた場合における片持ち梁の変形状態の解析結果を示した図である。
【図9】(A)は単純梁の概略説明図であり、(B)は本発明の線材モデルLMによってモデル化した単純梁の概略図であり、(C)は単純梁の中央に集中荷重を加えた場合における単純梁の変形状態の解析結果を示した図である。
【図10】片持ち梁および単純梁の解析結果を、理論解と比較した図である。
【図11】載荷実験結果を示した図である。
【図12】載荷解析結果を示した図である。
【図13】共振実験結果を示した図である。
【図14】共振解析結果を示した図である。
【発明を実施するための形態】
【0013】
つぎに、本発明の実施形態を図面に基づき説明する。
本発明は、河川護岸や擁壁等に使用されるじゃかごの挙動を解析するための解析モデルおよびそのモデルを用いた挙動解析方法であり、中詰材だけでなく、金網を構成する線材についても複数の粒子からなるモデルとしたことに特徴を有している。つまり、金網を構成する線材自体のモデル化に個別要素法に基づくモデル化を採用したことに特徴を有している。
【0014】
まず、解析モデルや挙動解析方法を説明する前に、じゃかごについて簡単に説明する。
【0015】
図1は本発明の対象となるじゃかご1の概略説明図であって、(A)は外観の斜視図であり、(B)は網箱10の部分概略拡大図である。同図に示すように、じゃかご1は、箱状の網箱10と、その網箱10の中に収容された中詰材5とから構成されている。
【0016】
図1に示すように、中詰材5は複数の石材5aから構成されている。複数の石材5aは互いに固定されておらず、相対的に移動できる状態で網箱10内に収容されている。つまり、複数の石材5aは、互いに押し合ったり、互いに接触した状態で滑ったりできる状態、また、互いに接触した状態から離間したり逆に離間した状態から接近して接触したりできる状態(以下、接触離間できる状態という)で網箱10内に収容されているのである。
なお、中詰材5は複数の塊状の物体から構成されておればよく、実際のじゃかごでは石材に限られず、骨材や、コンクリート塊等、また、これら(石材、骨材、コンクリート塊等)と土との混合物等も中詰材5として使用されている。
【0017】
図1に示すように、網箱10は、複数本の棒状体11aから形成される枠部11と、この枠部11に取り付けられる網部12とから構成されている。
【0018】
枠部11は、複数本の棒状体11aを連結して形成された部材である。この枠部11は、網箱10の骨組みとなる部材であり、網箱10は、枠部11の形状に形成される。例えば、図1であれば、枠部11が略直方体状に形成されているので、網箱10が略直方体状となるのである。
なお、以下の実施形態では、枠部11が略直方体状に形成されている場合、つまり、網箱10が略直方体状に形成されている場合を説明するが、網箱10の形状は直方体に限られず、円筒形や多角形、複合波形等としてもよく、その形状は特に限定されない。
【0019】
図1に示すように、前記枠部11において、棒状体11aに囲まれている各面には、網部12が設けられている。この網部12は鉄線等の線材12a同士を編んで形成されたものである。具体的には、一の線材12aを屈曲した屈曲部12bと、他の線材12aの屈曲部12bが係合した状態となるように形成されている。そして、互いに係合している線材12a同士は、屈曲部12b同士が係合しているだけであるので、ある程度自由に動くことができるように構成されている。つまり、網部12は、係合した線材12a同士が互いに接触した状態で滑ったり接触離間したり引っ張り合ったりできる状態となるように形成されているのである。
【0020】
この網部12は、その外周縁が枠部11の棒状体11aに対して取り付けられている。具体的には、網部12はその線材12aの屈曲部12bを棒状体11aに引っ掛けたり、また、線材12aの端部を棒状体11aに巻き付けたりなどして、枠部11に取り付けられている。
なお、網部12を枠部11の棒状体11aに取り付ける方法はとくに限定されない。例えば、網部12の外周縁に位置する線材12aを上述したような方法で棒状体11aに取り付ければ、線材12は、棒状体11aから離れることは無いが棒状体11aに沿ってある程度自由に動くことができる。また、網部12が枠部11に対して移動できないように、網部12の外周縁を溶接などによって完全に棒状体11aに固定してもよい。
【0021】
以上のごとき構成であるから、じゃかご1に対して変形させようとする力、例えば、じゃかご1を上下方向から圧縮する力やじゃかご1を左右上下に振動させる力等が加わった場合、じゃかご1は変形して力を吸収することができる。
具体的には、じゃかご1に力が加わると、中詰材5は複数の石材5aが押し合うので、複数の石材5aは、石材5a同士の相互作用により相対的な位置を変える。すると、じゃかご1に加わる力は、石材5aの運動エネルギや摩擦熱等に変換されて吸収される。また、石材5aが移動すると、石材5aが網箱10の網部12を押すので、網部12も、その線材12aが曲がったり屈曲部12b同士が離間したりすることによって変形してじゃかご1に加わる力を吸収する。
したがって、じゃかご1に対して変形させようとする力が加わっても、じゃかご1の各要素(中詰材5、網箱10)の移動変形によってこの力が吸収されるから、じゃかご1自体が大きく破損することを防ぐことができる。
【0022】
つぎに、じゃかごの解析モデルについて説明する。
図2は本発明のじゃかごモデル1Aの概略説明図である。
本発明では、上述したような形状、特性を有するじゃかご1を、個別要素法を用いてモデル化しているのであるが、図2に示すように、中詰材5と網箱10とをそれぞれ別々にモデル化している。そして、別々にモデル化された中詰材モデル5Aと網箱モデル10Aとを組み合わせて、じゃかごモデル1Aを形成している。
【0023】
(中詰材モデルの説明)
まず、中詰材モデル5Aについて説明する。
図3(A)は中詰材モデル5Aの部分拡大図であり、(B)は隣接する粒状体M1,M2間の接触点CPにおける座標軸を説明した図である。
図4(A)は隣接する粒状体M1,M2間の接触点CPにおけるX軸方向の力学モデルであり、(B)は隣接する粒状体M1,M2間の接触点CPにおけるY軸およびZ軸方向の力学モデルである。
【0024】
(構造モデルの説明)
中詰材5は、上述したように複数の石材5aから構成されているので、中詰材モデル5Aは、石材5aに相当する粒状体Mが複数集合したモデルとしている。具体的には、粒径が不均一な複数の粒状体Mがランダムに存在しているモデルを、中詰材モデル5Aとしている(図2、図3(A)参照)。なお、各粒状体Mは、変形しない剛体球と仮定している。
【0025】
(力学モデルの説明)
また、本実施形態の中詰材モデル5Aでは、粒状体M同士の接触点CPにおける相互作用を以下のような力学モデルで表現している。
図3(B)に示すように、中詰材モデル5Aにおいて、隣接する粒状体M1,M2間の接触点CPと両者の中心O1,O2を通る軸をX軸とし、このX軸と直交する2軸をY軸、Z軸とする。
この場合において、本実施形態の中詰材モデル5Aでは、図4(A)に示すように、接触点CPにおけるX軸方向の力学モデルとして、粒状体M間にスプリングS・ダッシュポットD・ディバイダXを配置したモデルを採用している。つまり、フォークトモデル(スプリングSとダッシュポットDとが並列に配置されたモデル)によって隣接する粒状体M1,M2の接触点CPにおいてX軸方向に沿って働く力を表現し、ディバイダXによって粒状体M1,M2が接触した状態と非接触となった状態の2つの状態を取り得ることを表現している。
【0026】
一方、本実施形態の中詰材モデル5Aでは、図4(B)に示すように、接触点CPにおけるY軸方向およびZ軸方向の力学モデルとして、粒状体M間にスプリングS・ダッシュポットD・クーロンスライダCSを配置したモデルを採用している。つまり、フォークトモデルによって隣接する粒状体M1,M2の接触点CPにおいてY軸方向またはZ軸方向に沿って働く力を表現し、クーロンスライダCSによって粒状体M1,M2間における摩擦相互作用、つまり、粒状体M1,M2が互いに滑って移動することがあり得ることを表現している。
【0027】
(運動方程式の説明)
そして、上記のごとき力学モデルを採用した場合には、粒状体M1,M2が接触している場合には、粒状体M1については、粒状体M2との接触点CPにおける各軸方向について下記数1および数2がそれぞれ成立する。
【0028】
なお、下記数1および数2において、粒状体M1の半径をr1とすると、符号m1は粒状体M1の質量、符号uは粒状体M1の粒状体M2に対する並進変位、符号φは粒状体M1の粒状体M2に対する回転変位、符号K1,K2は粒状体M1、M2間のバネの弾性定数、符号η1,η2は粒状体M1、M2間のダッシュポットの粘性係数、符号I1は粒状体M1の慣性モーメント(=ρp8πr15/15、ρpは粒状体M1の密度)を示している。f1,f2はそれぞれ粒状体M1に粒状体M2から加わるu,φ方向の力あるいは粒状体M1に直接加わる強制外力である。
また、バネの弾性定数K1,K2、ダッシュポットの粘性係数η1,η2は、接触点CPにおける各軸方向についてそれぞれ定められる。そして、これらの具体的な数値は、解析対象となる実際のじゃかごに使用される中詰材の密度や剛性、摩擦係数、材料減衰の大きさ等に応じて設定する。
【0029】
【数1】
【数2】
【0030】
そして、中詰材5では、一つの石材5aに対して複数の石材5aが接触しているので、中詰材モデル5Aでも一つの粒状体Mに複数の粒状体Mが接触しているモデルとなる(図2、図3(A)参照)。
【0031】
よって、ある粒状体M(対象粒状体M)と、この対象粒状体Mに接触している全ての粒状体Mとの接触点CPにおける各軸方向について成立する運動方程式を連立して解けば、各軸に対する対象粒状体Mの並進変位u、対象粒状体Mの回転変位φが得られるので、対象粒状体Mの運動を求めることができる。
【0032】
そして、中詰材モデル5Aに対して力を加えたときにおける中詰材モデル5Aの変形挙動は、その構成要素となる全ての粒状体Mの運動が合成されたものであるので、全ての粒状体Mの運動を求めれば、中詰材モデル5Aの変形挙動を求めることができる。
【0033】
なお、中詰材モデル5Aを構成する各粒子Mについて、隣接する粒子Mとの接触点において成立する運動方程式は、数1および数2のパラメータを、各粒子Mおよび隣接する粒子Mに合わせて適切な値とすることによって形成することができる。つまり、粒子Mの大きさや物性および隣接する粒子Mの大きさや物性が異なっても、上記数1および数2のパラメータ(r、m、K、η、I、f)を変更すれば、各粒子Mと隣接する粒子Mとの接触点において成立する運動方程式を形成することができる。
【0034】
例えば、粒状体M1と接触している上記粒状体M2であれば、粒状体M1との接触点CPにおける各軸方向について下記数3および数4のごとき運動方程式が成立する。つまり、数1および数2における各パラメータを、粒状体M2に適したパラメータに変更すれば、粒状体M2について、粒状体M1との接触点CPの各軸方向について成立する運動方程式(数3、数4)を形成することができる。
なお、数3、数4では、数1、数2から、符号m1を符号m2(粒状体M2の質量)に、また、符号I1を符号I2(粒状体M2の慣性モーメント(=ρp8πr25/15、ρpは粒状体M2の密度、r2は粒状体M2の半径))に、符号η1,η2を符号η11,η22に、符号K1,K2を符号K11,K22に、符号f1,f2を符号f11,f22に変更している。
【0035】
【数3】
【数4】
【0036】
(網箱モデルの説明)
つぎに、網箱モデル10Aについて説明する。
じゃかご1における網箱10は、枠部11の棒状体11a、および網部12の線材12aから構成されている。つまり、網箱10は、線径は異なるものの、全て線材によって形成されている。
よって、本発明では、まず線材をモデル化し、この線材モデルを複数本の組み合わせて網箱10の形状を形成することによって、網箱モデル10Aを形成している。
【0037】
(線材モデルの説明)
まず、本発明の網箱モデル10Aにおいて採用した線材モデルLMを説明する。
【0038】
図5は(A)は線材モデルLMの概略拡大説明図であり、(B)は線材モデルLMを構成する連結部材EBの概略説明図である。同図に示すように、本発明では、線材をモデル化する際に通常使用される有限要素の方法(非特許文献1)ではなく、独自の方法で線材をモデル化している。具体的には、本発明の線材モデルLMは、線材の軸方向に沿って並んだ複数の粒子CMと、隣接する粒子CM間に配置された連結部材EBとから構成されたモデルとしている。
【0039】
(線材モデルの構造モデルの説明)
まず、線材モデルLMを構成する複数の粒子CMは、その直径がモデル化する各線材(棒状体11a、線材12a)の軸径と同じ長さである剛体球を仮定している。
なお、粒子CMは、剛体球とした以外は、線材の素材と同一の物性を有すると仮定している。つまり、粒子CMは、変形はしないが、その密度等の物性はモデル化する各線材と同等の物性を有すると仮定している。
【0040】
つぎに、連結部材EBは、弾性変形可能な要素であって、モデル化する各線材と同一の軸径の円筒を仮定している。しかも、この連結部材EBは、その軸方向の両端に粒子CMが配置される凹みhが形成されている。この凹みhは、粒子CMと同一半径の半球状の凹みである。そして、連結部材EBは、両端の凹みhにそれぞれ粒子CMが配置されたときに、隣接する粒子CM同士が点接触するように構成されている。
なお、連結部材EBは、粒子CMと同様に、線材の素材と同一の物性を有すると仮定しており、弾性変形が可能である点およびその形状以外は、粒子CMと実質的に同一の物性を有すると仮定している。
【0041】
(力学モデルの説明)
図6は隣接する粒子CMと連結部材EBとの間の接触点CPにおける力学モデルである。
本発明の線材モデルLMでは、線材モデルLMを構成する複数の粒子CMは、隣接する粒子CM同士が点接触しかつ粒子CM間で滑りが生じない接触条件を仮定している。
このため、本発明の線材モデルLMでは、隣接し点接触する粒子CM間の接触点における力学モデルとして、図4の力学モデルにおいて、Y軸、Z軸方向の力学モデル(図4(B)のモデル)が、図6に示すように、クーロンスライダCSを有しないモデルを採用している。なお、X軸方向の力学モデルは、図4(A)のモデルをそのまま採用している。
【0042】
一方、連結部材EBと粒子CM間では、連結部材EBの凹みhの内面と粒子CMの表面とが接着されている状態、言い換えれば、両表面の相対的な移動が固定された状態を仮定している。
このため、本発明の線材モデルLMでは、連結部材EBと粒子CMとの接触点における力学モデルとして、図6に示すように、ディバイダXやクーロンスライダCSを有しない、並列に配置された3つのフォークトモデルのみからなるモデルを採用している。
【0043】
具体的には、3つのフォークトモデルにおける各スプリングSの伸縮方向が、それぞれ、連結部材EBにおける凹みの内面の法線方向(X軸方向)および、この法線方向と直交する2軸(Y軸方向、Z軸方向)と平行になるように配設されたモデルを採用している。すると、接触点の力学モデルにおける各軸方向の伸縮のベクトル和が、接触点における連結部材EBの弾性変形を表現することになる。
【0044】
また、本発明の線材モデルLMでは、連結部材EBの凹みの内面と粒子CMの表面とが面接触する状態を仮定しているので、隣接する粒子CM間の接触点は一つであるが、粒子CMと連結部材EBとの接触点は無数に存在している。つまり、本発明の線材モデルLMは、両者の間に前記力学モデルが無数に存在しているモデルとなる。
すると、線材の断面における各部の弾性変形を、隣接する粒子CMと連結部材EBとの間に無数に存在する力学モデルによって表現することができるから、本発明の線材モデルLMでは、線材の曲げ撓みなどの変形を表現することができるのである。
【0045】
なお、本発明の線材モデルLMでは、連結部材EBの凹みの内面と粒子CMの表面とが面接触する状態を仮定しているので、接触点は無数に存在することになる。しかし、線材モデルLMの挙動解析を行う場合には、必要とする精度に応じて接触点数を適宜設定すればよい。
【0046】
また、本発明の線材モデルLMでは、連結部材EBの凹みの内面と粒子CMの表面とが面接触する状態を仮定しているので、粒子CM同士が点接触する位置では、粒子CM同士の点接触モデルと、連結部材EBと粒子CMとの面接触モデルがともに成立することとしている。このため、粒子CM同士が点接触する位置では、後述する粒子CMの接触点で成立する運動方程式と、後述する粒子CMと連結部材EBとの接触点で成立する運動方程式の両方が、ともに成立するのである。
【0047】
そして、本発明の線材モデルLMでは、粒子CM同士は常に接触した状態に保たれることを仮定している。このため、線材モデルLMを曲げ変形させた場合、粒子CM同士の相対的な位置の変化に伴って、粒子CM同士が点接触する位置が変化する。このとき、連結部材EBと粒子CMとは全面で面接触した状態にあるため、粒子CMの表面において連結部材EBと接触していた接触面に、粒子CM同士が点接触する位置が新たに現れることになる。つまり、線材モデルLMを曲げ変形させた場合には、変形による粒子CM同士の点接触する位置の変化に伴って、連結部材EBと粒子CMとの接触面の状況が変化する。
本発明では、線材モデルLMが破断しない限り、連結部材EBと粒子CMとが離間することはないものと仮定している。すなわち、連結部材EM、粒子CMの応力がともに破断応力に達しなければ、粒子CM同士が新たな位置(新接触点)で点接触しても、この新接触点においてもともと存在していた連結部材EBと粒子CMとの連結が切れることはないものと仮定している。このため、新接触点では、元々粒子CM同士が点接触していた位置と同様に、粒子CM同士の点接触モデルと、連結部材EBと粒子CMとの面接触モデルがともに成立する。
以上のごとく、本発明の線材モデルLMの解析では、線材モデルLMの変形状態、つまり、連結部材EBと粒子CMとの接触状況が変化するので、この接触状況が変化に応じて、接触点で成立する運動方程式も時々刻々と成立することになるのである。
【0048】
(運動方程式の説明)
線材モデルLMにおいて、上記のごとき力学モデルを採用した場合には、隣接する粒子CMの接触点CPにおける各軸方向について、前述した数1および数2と実質的に同一の運動方程式が成立する。つまり、数1および数2における各パラメータを、粒子CMに適したパラメータに変更すれば、隣接する粒子CMの接触点CPの各軸方向について成立する運動方程式を形成することができる。
【0049】
また、連結部材EBの凹みhの内面と粒子CMの表面の各接触点CPにおける各軸方向については、下記数5および数6がそれぞれ成立する。
【0050】
なお、下記数5および数6において、符号meは連結部材EBの質量、符号uは連結部材EBの粒子CMに対する並進変位、符号φは連結部材EBの粒子CMに対する回転変位、符号K3,K4は連結部材EBと粒子CMとの間のバネの弾性定数、符号η3,η4は連結部材EBと粒子CMとの間のダッシュポットの粘性係数、符号Ieは連結部材EBの慣性モーメントを示している。f3,f4はそれぞれ連結部材EBに粒子CMから加わるu,φ方向の力あるいは連結部材EBに直接加わる強制外力である。
また、バネの弾性定数K3,K4、ダッシュポットの粘性係数η3,η4は、接触点CPにおける各軸方向についてそれぞれ定められる。そして、これらの具体的な数値は、解析対象となる実際のじゃかごに使用される網部の線材の密度や剛性、摩擦係数、材料減衰の大きさ等に応じて設定する。
【0051】
【数5】
【数6】
【0052】
なお、粒子CMについても、連結部材EBとの接触点CPにおける各軸方向について、前述した数5および数6と実質的に同一の運動方程式が成立する。つまり、数5および数6における各パラメータを、粒子CMに適したパラメータに変更すれば、連結部材EBと隣接する粒子CMの接触点CPの各軸方向について成立する運動方程式を形成することができる。
【0053】
よって、各連結部材EBについて、粒子CMとの全接触点の各軸方向について成立する、数5、数6の運動方程式と、各粒子CMについて、隣接する粒子CMとの接触点および連結部材EBとの全接触点における各軸方向について成立する運動方程式を連立して解けば、各粒子CMの移動や各連結部材EBの変形を求めることができる。
【0054】
そして、線材モデルLMに対して力を加えたときにおける線材モデルLMの変形挙動は、その構成要素となる、全粒子CMの移動と全連結部材EBの変形が合成されたものであるので、全粒子CMの移動と全連結部材EBの変形を求めれば、線材モデルLMの変形挙動を求めることができる。
【0055】
また、上記のごとき粒子CMと連結部材EBからなる線材モデルLMは、じゃかごモデル1Aの網箱モデル10Aの解析に限られず、様々な解析に採用することができる。例えば、線材を構成要素に含む部材や、複数本の線材を束ねたケーブル等の変形解析に採用することができるし、単一線材の変形解析にも採用することができる。
【0056】
(網箱の線材同士の接触部分における力学モデルの説明)
本発明の網箱モデル10Aは、上記のごとき線材モデルLMを複数本組み合わせてその形状を形成するが、上述したように、じゃかご1の網箱10では、網部12の線材12a同士、または、線材12aと枠部11の棒状体11aとは、いずれも互いに係合しているだけであり、滑ったり接触離間したり引っ張り合ったりできる状態となっている。
このため、網箱モデル10Aでは、複数の線材モデルLMを組み合わせて形状を形成するとともに、線材モデルLM同士が接触する部分における相互作用もモデル化する必要がある。
【0057】
本発明では、網箱10の線材12aに、上述したような線材モデルLMを採用しているので、線材12a同士の相互作用を、異なる線材モデルLMを構成する要素(粒子CMおよび連結部材EB)間の相互作用としてモデル化することができる。
具体的には、図7に示すように、互いに係合している線材12a同士(図7(A))において、各線材12aを線材モデルLM1,LM2同士で表現すると、図7(B)のようになる。また、各線材12aが離間した状態、つまり、線材モデルLM1,LM2同士が離間した状態は、図7(C)のようになる。すると、線材モデルLM1,LM2間の相互作用は、線材モデルLM1,LM2を構成する要素同士が接触離間等する作用と実質的に同等と考えることができる。
【0058】
よって、線材モデルLM1,LM2を構成する要素間の力学モデルとして、前述した中詰材モデル5Aにおける隣接する粒状体M1,M2間の力学モデルを採用する。すると、実際の網部12の線材12a間に生じる線材12a同士の接触離間や相対的な滑りを、各線材12aに対応する線材モデルLMにおける要素間の相対的な移動として、網箱モデル10Aにおいて再現させることができる。
つまり、線材モデルLM1,LM2を構成する粒子CM間(例えば、粒子CM1と粒子CM2間)の力学モデル、線材モデルLM1,LM2を構成する連結部材EB間(例えば、連結部材EB1と連結部材EB2間)の力学モデル、または、線材モデルLM1,LM2を構成する連結部材EBと粒子CM間(例えば、連結部材EB1と粒子CM2間)の力学モデルに、前述した中詰材モデル5Aにおける隣接する粒状体M1,M2間の力学モデルを採用する。すると、各線材12aに対応する線材モデルLMにおける粒子CM間の相対的な移動、連結部材EB間の相対的な移動、および連結部材EBと粒子CMとの間の相対的な移動を合成することにより、実際の網部12の線材12a間に生じる線材12a同士の接触離間や相対的な滑りを、網箱モデル10Aにおいて再現させることができる。
【0059】
同様に、枠部11の棒状体11aと網部12の線材12aの相互作用についても、異なる線材モデルLMの要素間の相互作用としてモデル化できる。よって、実際の枠部11の棒状体11aと網部12の線材12aとの間に生じる相対的な滑りを、各線材12aの線材モデルLMにおける要素間の相対的な移動として、網箱モデル10Aに再現させることができる。
なお、網部12の線材12a同士は接触離間できるが、線材12aは枠部11の棒状体11aから離間することはできない。このため、棒状体11aと線材12aとの間の相互作用の力学モデルには、線材12a間の相互作用の力学モデルと異なり、X軸方向の力学モデルにおいてディバイダXを有しないモデルを採用する必要がある。
【0060】
(運動方程式の説明)
そして、線材12a同士の相互作用を、上記のごとくモデル化した場合には、隣接する線材モデルLMの粒子CM同士の各接触点における各軸方向について、数1および数2と同様の式がそれぞれ成立する。
ただし、パラメータm,η,K,Iならびに強制外力fは、異なる値(線材12aに適した値)となり、また、バネの弾性定数K、ダッシュポットの粘性係数ηは、数1、数2等と同様に、各軸方向についてそれぞれ定められる。そして、これらのパラメータの具体的な数値は、解析対象とする実際のじゃかごの網部の剛性、引張り強度、剪断強度、材料減衰の大きさ等に応じて設定する。
【0061】
同様に、隣接する線材モデルLMの連結部材EB間の各接触点、および、隣接する線材モデルLMにおける粒子CMと連結部材EBとの各接触点においても、各軸方向について数1および数2と同様の式がそれぞれ成立する。また、バネの弾性定数K、ダッシュポットの粘性係数ηは、数1、数2等と同様に、各軸方向についてそれぞれ定められる。そして、これらのパラメータの具体的な数値は、解析対象とする実際のじゃかごの網部の剛性、引張り強度、剪断強度、材料減衰の大きさ等に応じて設定する。
【0062】
以上のごとく、網箱モデル10Aは、粒子CMと連結部材EBからなる線材モデルLMを採用し、かつ、線材同士の接触状態を線材モデルLMにおける要素間の相互作用としてモデル化している。
このため、網箱モデル10Aに対して力を加えたときにおける網箱モデル10Aの変形挙動は、各線材モデルLMにおける粒子CMの移動および連結部材EBの変形(つまり、各線材モデルLMの変形)と、異なる線材モデルLMの構成要素であってかつ互いに隣接する要素間の相対的な移動(つまり、隣接する線材モデルLM同士の相対的な移動)が合成されたものとなる。
よって、全ての線材モデルLMにおける粒子CMの移動および連結部材EBの変形と、異なる線材モデルLMの構成要素であってかつ隣接する要素間の相対的な移動とを求めれば、網箱モデル10Aの変形挙動を求めることができる。
【0063】
(モデル同士が接触する部分の力学モデルの説明)
また、じゃかご1は、中詰材5の石材5aを網箱10内に収容した構造であるから、石材5aと網箱10を構成する各線材(棒状体11a、線材12a)も接触している。つまり、一方の動きが他方にも影響を与える関係にあるから、石材5aと網箱10を構成する各線材との相互作用についてもモデル化する必要がある。
【0064】
上述したように、本発明では、じゃかごモデル1Aを構成する中詰材モデル5Aおよび、網箱モデル10Aを構成する線材モデルLMが、いずれも複数の粒状体(中詰材モデル5Aでは粒状体M、線材モデルLMでは粒子CMおよび連結部材EM)を有するモデルを採用している。
このため、石材5aと網箱10を構成する各線材との相互作用は、中詰材モデル5Aの粒状体Mと、線材モデルLMの要素(粒子CMまたは連結部材EM)との間における相互作用としてモデル化することができる。
本発明では、両者間の相互作用の力学モデルに、前述した中詰材モデル5Aにおける隣接する粒状体M1,M2間の力学モデルと同等のモデルを採用している。
【0065】
かかる力学モデルを採用すれば、実際の中詰材5の石材5aと網箱10の各線材間に生じる相互作用(接触離間や相対的な滑り)を、中詰材モデル5Aの粒状体Mと線材モデルLMの要素の相対的な移動として、じゃかごモデル1Aにおいて再現させることができる。
【0066】
しかも、網箱モデル10Aは線材モデルLMの組み合わせで形成されているので、各線材モデルLMは撓んだり屈曲したりできる。しかも、線材モデルLMで囲まれた空間(網の目に相当する)は何もない空間として網箱モデル10Aに再現されている。
このため、本発明のじゃかごモデル1Aでは、実際のじゃかご1において石材5aが網箱10の網部12の目を広げながら外部に孕みだす状態、つまり、石材5aが網部12の空間から外部に突出するような状態も再現することができる。例えば、解析結果として、中詰材モデル5Aの粒状体Mの一部が、線材モデルLMで囲まれた空間を広げてその空間から外部に突出した状態を得ることができるのである。
【0067】
(運動方程式の説明)
そして、中詰材モデル5Aの粒状体Mと線材モデルLMの要素の相対的な移動は、粒状体Mと要素との各接触点における各軸方向について、数1および数2と同様の式がそれぞれ成立する。
ただし、パラメータm,η,K,Iならびに強制外力fは、異なる値(粒状体Mと線材12aとの相互作用に適した値)となり、また、バネの弾性定数K、ダッシュポットの粘性係数ηは、数1、数2等と同様に、各軸方向についてそれぞれ定められる。そして、これらのパラメータの具体的な数値は、解析対象とする実際のじゃかごの中詰材および網部の特性(剛性、引張り強度、剪断強度、材料減衰の大きさ等)に応じて設定する。
【0068】
本発明のじゃかごモデル1Aは、以上のごとくモデル化されているので、中詰材モデル5Aの粒状体Mの運動、網箱モデル10Aにおける線材モデルLMの連結部材EBの変形、異なる線材モデルLMの構成要素であってかつ隣接する要素間の相対的な移動、および、中詰材モデル5Aの粒状体Mと網箱モデル10Aにおける線材モデルLMの要素との間の相対的な移動が合成されたものとなる。
よって、中詰材モデル5Aの全ての粒状体Mの運動、全ての線材モデルLMにおける全ての連結部材EBの変形、異なる線材モデルLMの構成要素であってかつ隣接する要素間の相対的な移動、中詰材モデル5Aの粒状体Mと線材モデルLMの要素との間の相対的な移動を求めれば、じゃかごモデル1Aの変形挙動を求めることができる。
【0069】
(じゃかごモデルの挙動解析)
上述したようなじゃかごモデル1Aを用いた挙動解析では、前記運動方程式を連立して解くことによって、中詰材モデル5Aの全ての粒状体Mの運動、全ての線材モデルLMにおける全ての連結部材EBの変形、異なる線材モデルLMの構成要素であってかつ隣接する要素間の相対的な移動、中詰材モデル5Aの粒状体Mと線材モデルLMの要素との間の相対的な移動が算出できる。
【0070】
ここで、上述した前記運動方程式を連立して解くためには、まず、(1)中詰材モデル5Aではどの粒状体M同士が接触しているか、(2)網箱モデル10Aの異なる線材モデルLM間においてどの要素同士が接触しているか、(3)中詰材モデル5Aにおけるどの粒状体Mと、網箱モデル10Aにおける線材モデルLMのどの要素とが接触しているか、をそれぞれ求める必要がある。
【0071】
そして、じゃかごモデル1Aに加える外部入力を与えて、接触している粒状体M同士間の運動方程式、線材モデルLMにおける粒子CMと連結部材EB間の運動方程式、異なる線材モデルLMの構成要素であってかつ隣接する要素間の運動方程式、および接触している粒状体Mと線材モデルLMの要素との間の運動方程式、を連立して解く。すると、外部入力が加わったときにおけるじゃかごモデル1Aの挙動を得ることができる。
【0072】
(接触判定)
つぎに、粒状体M同士等が接触しているか否かについて判断する接触判定について説明する。
なお、中詰材モデル5Aにおける粒状体M同士の接触判定、異なる線材モデルLMに属する粒子CM間の接触判定、中詰材モデル5Aにおける粒状体Mと線材モデルLMにおける要素との接触判定は、いずれも実質的に同じ方法で接触判定が行われる。よって、以下では、代表として、図3に基づき、中詰材モデル5Aにおける粒状体M同士の接触判定を説明する。
【0073】
図3における2つの粒状体M1,M2間の接触判定を考える。時刻tにおける粒状体M1,M2の中心O1,O2の座標をそれぞれO1(xi,yi,zi),O2(xj,yj,zj),半径をri,rjとすると、粒状体M1,M2の接触判定条件は数7で表される。すなわち、数7が成り立つとき、2つの粒状体M1,M2は非接触状態にある。そうでないときには接触状態になる。
【数7】
【0074】
よって、上記数7による接触判定を、全ての中詰材モデル5Aにおける粒状体Mおよび、全ての線材モデルLMにおける要素について行えば、連立して解くべき運動方程式を求めることができる。
【0075】
また、接触判定を行う要素が連結部材EBの場合には、連結部材EBが球形でないため、上記数7に代えて、以下の数8を採用する必要がある。つまり、粒状体Mの中心Oの座標をO(xk,yk,zk),半径をrk、連結部材EBの外周部の任意座標をP(xl,yl,zl)とすると、数8が成り立つとき、粒状体Mと連結部材EBは非接触状態にある。そうでないときには接触状態になる。この判定は連結部材EBの外周部全体にわたって実施される。
【0076】
【数8】
【0077】
なお、連結部材EB同士の接触判定には、以下の数9を採用する必要がある。つまり、時刻tにおける線材モデルLM1における粒状体CM1同士の接触点、線材モデルLM2における粒状体CM2同士の接触点の中心O1,O2の座標をそれぞれO1(xmc,ymc,zmc),O2(xnc,ync,znc),線材モデルLM1、LM2における粒状体CM1、CM2の半径をそれぞれrmc,rnc、線材モデルLM1、LM2における連結部材EB1,EB2の外周部の任意座標をそれぞれP(xml,yml,zml), P(xnl,ynl,znl)とすると、数9が成り立つとき、連結部材EB1と連結部材EB2は非接触状態にある。そうでないときには接触状態になる。この判定は連結部材EB1, EB2の外周部全体にわたって実施される。
【数9】
【0078】
また、線材モデルLMを用いて単一線材(一本の線材)の変形解析を行う場合には、線材が破断しなければ粒子CMと連結部材EBとが離間することがない。よって、単一線材の変形解析において、線材が破断するまでの解析を行わないのであれば、接触判定は不要である。
【0079】
(挙動解析)
じゃかご1では、中詰材5の各石材5aは、複数の石材5aや、網箱10における枠部11の複数の棒状体11aや、網部12の複数の線材12aと接触している。すると、本発明のじゃかごモデル1Aの場合、一つの粒状体Mまたは一つの粒子CMは、他の複数の粒状体Mや複数の粒子CMと接触しているので(図3(A)参照)、個々の接触点に対して上記運動方程式が成立する。
このため、一の粒状体M等と他の粒状体M等との間に成立する全ての運動方程式を連立して解けば、一つの粒状体M等の運動を把握することができる。そして、じゃかごモデル1Aを構成する全ての粒状体M等について成立する全ての運動方程式を連立して解けば、じゃかごモデル1Aの挙動を把握することができる。
【0080】
(差分解析)
ここで、じゃかごモデル1Aは、非常に多数の粒状体M等を有しているので、じゃかごモデル1Aの挙動を把握するには、非常に膨大な数の運動方程式を連立して解かなければならない。すると、計算時間が長くなる。
【0081】
そこで、かかる問題を解消するために、本発明では、じゃかごモデル1Aの挙動解析に、個別要素法で採用される差分近似による解析を採用している。具体的には、上述したような運動方程式について、時間増分Δtで差分近似して計算する方法を採用している。かかる差分近似による計算では、時間領域でステップ・バイ・ステップに前進的に方程式を解いていく。つまり、運動方程式を前進解法で解くため、運動方程式を連立して解く必要がない。すると、粒状体M等の数が多くなっても、運動方程式を解く他の方法に比べて計算時間を短くできる。
【0082】
例えば、上述した粒状体M1に成立する運動方程式(数1)であれば、下記数10のように時間増分Δtで差分近似して計算することができる。
【数10】
すると、粒状体M1の新しい時刻tにおける粒状体M2に対する相対的な加速度は、時刻Δtだけ前の粒状体M2に対する相対的な変位と粒状体M2に対する相対的な速度から得られるし、新しい時刻tにおける加速度を数値積分すると、時刻tにおける変位と速度が得られる。よって、この計算を時刻刻みΔtで繰り返せば、粒状体M1の粒状体M2に対する相対的な運動軌跡を計算することができる。
【実施例1】
【0083】
(線材モデルによる解析の検証)
線材の変形解析において、本発明の線材モデルが有効であることを確認するために、本発明の線材モデルによってモデル化した梁の荷重変形解析結果を、梁の荷重変形の理論解と比較した。解析は、片持ち梁に対してその先端に集中荷重と曲げモーメントを加えた場合における梁の変形(図8)と、単純梁に対してその中央部に集中荷重を加えた場合における梁の変形(図9)について行った。
【0084】
梁の変形は、z方向のたわみδz、y軸(図8、図9の紙面に垂直な方向)回りの回転角(たわみ角)θy、x軸回りの回転角(ねじり角)θxによって評価した。
【0085】
理論解において、上記δz、θy、θxは、以下の数11〜14から算出している。
(1)片持ち梁
【数11】
【数12】
【数13】
(2)単純梁
【数14】
なお、以下に、上記数における各符号を説明する。
P:z方向の集中荷重
My:y軸回りの曲げモーメント
Mx:x軸回りのねじりモーメント
EI:曲げ剛性
GJ:ねじり剛性
L:スパン長
x:図8、図9に示すx軸における梁の位置
【0086】
また、梁は、断面円形、軸径D508mm、長さL5080mmのアルミニウム製の梁を仮定しており、解析では、バネの弾性定数Kは2.26×1012N/mとした。ただし、ダッシュポットの粘性定数ηについては考慮していない。
また、理論解の算出において、P、My、Mx、EI、GJには、以下の値を使用した。
P=1.78×106N
My=1.13×104N・m
Mx=2.26×105N・m
EI=2.25×108N・m2
GJ=1.69×108N・m2
【0087】
(結果の比較)
(1)片持ち梁
まず、図8に示すように、本発明の線材モデルでも、片持ち梁が撓む状況を再現できることが確認できた。
そして、片持ち梁については、壁面からの距離が、1016mm(Aの位置)、3048mm(Bの位置)、5080mm(Cの位置)の各位置について、上記δz、θy、θxを比較した。
図10に示すように、作用荷重として、P、My、Mxを全て加えた場合、Pのみを加えた場合、Myのみを加えた場合のいずれも、解析により得られるδz、θy、θxの値(シミュレーション解)は、理論解とほぼ一致した。
(2)単純梁
単純梁については、作用荷重として、その中央部に集中荷重Pを加えた場合のみを解析したが、図9に示すように、片持ち梁と同様に、本発明の線材モデルでも、単純梁が撓む状況を再現できることが確認できた。
しかも、図10に示すように、解析により得られるδz、θy、θxの値は、理論解とほぼ一致した。
【0088】
以上の解析結果から、本発明の線材モデルLM、および、この線材モデルLMの採用した個別要素法による挙動解析は、梁のように撓んだりする棒状の部材の解析に妥当な手法であることが確認できる。
【実施例2】
【0089】
(じゃかごモデルによる解析の検証)
本発明のじゃかごモデルを用いて、じゃかごに荷重・振動を加えた場合における変形挙動を解析し、実際のじゃかごを用いた載荷・共振試験の結果と対比・検討を行った。
【0090】
(載荷試験)
じゃかごの載荷試験は、試験機として加力載荷装置(鷺宮製作所製、Model2810)を用い、載荷板を介して、じゃかごをその上面から鉛直下向きに載荷速度0.5mm/sとなるように圧縮して、載荷加重と鉛直変位を測定した。なお、載荷加重と鉛直変位は、試験機によって測定した。
実験に使用した試験機は、最大荷重100kN,最大ストローク200mmのスペックを有する。
実験に使用したじゃかごは、大きさは500×800×800mmであり、中詰材には香川県産花崗岩を使用し、網箱は、亜鉛めっき線(SWMGH−3、線径4mm)から形成されたものを使用した。
【0091】
(共振試験)
また、じゃかごの共振試験は、振動実験機(IMV(株)製、DS−12500−25L)の加振テーブル上にじゃかごを設置して加振し、各部の加速度を求めた。
実験に使用した振動実験機のスペックは、2500×2500mmの寸法で、最大搭載荷重4000kg(加振テーブル質量含む)、正弦波加振時の最大加速度10.2m/s2(4000kg負荷時)、最大速度0.7m/s、最大変位100mm、振動数範囲1〜100Hzである。
実験条件(加振条件)は、正弦波加振の掃引試験で、掃引条件として振動数範囲1〜50Hz、加速度1m/s2、掃引速度1oct/minとした。
実験に使用したじゃかごは、大きさは500×1200×2000mmであり、中詰材には玉石、割ぐり石(充填率約65%)を使用しており、網箱は、亜鉛めっき線(SWMGH−3、線径4mm)から形成されたものを使用した。
そして、じゃかご各部の加速度は、加速度センサ(共和電業(株)製、AS−5GB、AS−20GB)を、石、金網、加振テーブルにそれぞれ取り付けて測定した。
【0092】
(じゃかごモデル)
じゃかごモデルは、その大きさ(網箱の大きさ)を500×1200×2000mm、つまり、共振試験に使用したじゃかごと同じ大きさにしている。
【0093】
中詰材モデルは、充填率約65%となるように、12〜15cmの異なる粒径の粒状体をランダムに発生させて形成した。なお、粒状体の素材は、花崗岩の玉石としている。
ただし、中詰材モデルの粒状体には、実際のじゃかごの中詰材として使用する石に起こりうる亀裂や破壊などの現象は反映させていない。つまり、粒状体は、変形が生じないものとしている。
【0094】
また、網箱モデルは、枠部を構成する線材の線径を4mm、網部を構成する線材の線径を4mm、網部の網目は13cmとした。なお、枠部および網部を構成する線材の素材は、亜鉛めっき鉄線としている。
【0095】
そして、中詰材モデルと網箱モデルの結合したじゃかごモデルは、以下のようにして形成した。
まず、網箱と同じ寸法の剛体壁の箱を生成し、その内側に最小粒径の粒状体よりも小さい半径の粒状体(粒径が12cm以下の粒状体)からなる中詰石モデルを発生させる。次に、設定した充填率(65%)になるまで粒状体の粒子半径をランダムに増加させる。この状態では、モデルにおける粒状体は互いに接触しているが重力が加わっていない状態、つまり、各粒状体が空中に浮いている状態と同等の状態であるので、充填率が65%となった段階でモデルにおける粒状体に対して重力加速度を与える。すると、粒状体は、重力によって粒状体同士が相互に力を及ぼしあいながら落下するように移動する。このとき、粒状体は剛体壁の箱内に収容されており、その動きが剛体壁に制限されるので、時間の経過とともに粒状体の動きが少なくなり、やがて、全ての粒状体が静止する安定状態(粒状体の速度が0になる状態)となる。この状態まで計算を行う。
その後、剛体壁の箱を網箱モデルに置き換える。すると、網箱モデルでは、剛体壁には存在しない網目が存在するので、粒状体と網箱モデルとの接触状態は、剛体壁の箱と粒状体との接触状態と異なった状態となる。すると、剛体壁の箱を網箱モデルに置き換えてから、再び粒状体に重力を加えると、粒状体は安定状態になるように移動するから、再びモデル全体の粒子が静止した安定状態になるまで計算する。
すると、網箱に石が詰められた実際のじゃかごと近似したじゃかごモデルを形成することができる。
【0096】
(載荷解析条件)
じゃかごの圧縮解析を行うため、側面は拘束せず、上下面に剛な板を生成した。上面の板に鉛直下向きの速度を付与し、解析によって載荷荷重と鉛直変位の関係を求めた。ここでは計算時間の都合上、じゃかご上面の鉛直変位が65mmに達するまで解析を行った。
【0097】
(共振解析条件)
じゃかごの共振解析では、線材を粒子によってモデル化しているので粒子サイズが非常に小さくなる。すると、粒子サイズの影響から計算時間間隔が極めて小さくなり、現実的な時間で実地震波による耐震解析を行うことは容易でない。そこで、弱軸方向(短軸方向)への入力波として共振周波数に近い周波数よりなる調和波を与えた解析を実施した。 なお、入力波は、前述したじゃかごの共振試験の結果を勘案して、最大速度30kine、周波数20Hzの調和波とした。
【0098】
上記の載荷解析および共振解析は、解析ソフトPFC3D(Itasca製)を使用して行った。
各運動方程式におけるバネの弾性定数Kやダッシュポットの粘性定数ηは、中詰材の石材(花崗岩の玉石)や網箱の金網の(線材)の材料試験(引張試験)の結果、じゃかごの縮小模型における載荷試験の結果に基づいて定めた。各パラメータの値は、それぞれ中詰材のバネの弾性定数をK=2.0×109N/m、線材のバネの弾性係数をK=2.5×106N/mとし、線材の引張強度をσn=5.78×108N/m2、剪断強度をσs=2.28×108N/m2とした。また、既往の研究成果を参考にして、減衰定数をh=0.05、摩擦係数をμ=0.85とした。なお、粘性係数ηは、減衰定数より公知の方法により求めることができる。
【0099】
つぎに、実験結果と解析結果を比較する。
【0100】
(載荷実験結果と載荷解析結果の比較)
図11は、載荷実験を3回行ったときにおけるじゃかごの上面中央部における荷重−変位曲線を示している。
図11に示すように、載荷実験で得られる荷重−変位曲線では、じゃかごがほぼ弾性的な挙動を示すことが確認できる。
一方、図12は、じゃかごの上面中央部における荷重−変位曲線の解析結果であるが、載荷解析鉛直変位が7.5mmと17.5mm 付近で、曲線に大きな変化が見られる。これは、圧縮により石の配置が変化するとともに、金網かごの変形に伴い、石が外側へ孕み出すことによって強度が減少したことに起因している。大きな圧縮荷重を与えても、金網は破断することなく、じゃかごが正常に機能していることが理解できる。この結果は試験結果とよく対応している。
【0101】
(共振実験結果と共振解析結果の比較)
図13は、じゃかごの上面中央部における共振実験の測定結果を示している。図13に示すように、じゃかごの共振周波数が20Hz付近にあることがわかる。この共振周波数は一般的に見られる実地震波の卓越周波数よりもかなり高周波であり、じゃかごが実地震波と共振する可能性が極めて低く、耐震性に優れていることが確認できる。
図14は、共振解析におけるじゃかごの底面、中面、上面のそれぞれの中央部における速度応答の解析結果を示しており、上方ほど速度応答の振幅が入力速度振幅よりも小さくなる傾向が見られる。この共振解析のじゃかごモデルでは、その共振周波数が必ずしも共振実験の結果として得られた共振周波数に対応していない。しかし、共振実験においても、共振解析の結果として得られた、中詰材の速度が入力速度振幅よりも小さくなる状態が見られている。そして、図示していなが、線材の部分でも同様の効果が得られているので、モデル化は大過ないと言える。
【0102】
以上の解析結果から、本発明のじゃかごモデル、および、このじゃかごモデルを採用した個別要素法による挙動解析は、実際のじゃかごの挙動特性の解析に妥当な手法であることが確認できる。
【産業上の利用可能性】
【0103】
本発明のじゃかごの解析モデルは、じゃかごの力学特性、耐震機能などの性能を定量的に解明するモデルとして適している。
また、線材の解析モデルは、鋼線等の線材や、かかる線材を構成要素とする部材の挙動解析や変形解析に使用するモデルとして適している。
【符号の説明】
【0104】
1 じゃかご
5 中詰材
5a 石材
10 網箱
11 枠部
11a 棒状体
12 網部
12a 線材
M 粒状体
CM 粒子
EB 連結部材
1A じゃかごモデル
5A 中詰材モデル
10A 網箱モデル
LM 線材モデル
【特許請求の範囲】
【請求項1】
網状部材によって形成される収容体と、該収容体内に収容された中詰材とからなるじゃかごの解析モデルであって、
前記中詰材には、
複数の粒状体からなるモデルを採用しており、
前記収容体の網状部材には、
該網状部材を形成する線材が、その構成要素として、該線材の軸方向に沿って並んで配設された複数の粒子と、該複数の粒子における隣接する粒子間に該粒子間の隙間を埋めるように設けられた連結部材とを有するモデルを採用しており、
前記中詰材の隣接する粒状体間には、該粒状体間の滑りおよび接触離間を考慮した接触条件を採用し、
前記網状部材を形成する同一の線材中の隣接する粒子間には、該粒子同士が常に接触した状態に保たれかつ該粒子間で滑りが生じない接触条件を採用し、
前記網状部材を形成する同一の線材中の連結部材と粒子との間には、両者の間で滑りが生じずかつ離間しない接触条件を採用し、
前記網状部材を形成する線材のうち、異なる線材中の構成要素間には、該構成要素間の滑りおよび接触離間を考慮した接触条件を採用し、
前記中詰材の粒状体と前記収容体の線材を構成する構成要素との間には、両者間の滑りおよび接触離間を考慮した接触条件を採用している
ことを特徴とするじゃかごの解析モデル。
【請求項2】
前記網状部材を形成する線材において、
前記複数の粒子における隣接する粒子同士は点接触し、前記粒子と前記連結部材との間は面接触する接触条件を採用している
ことを特徴とする請求項1記載のじゃかごの解析モデル。
【請求項3】
請求項1または2記載のじゃかごの解析モデルを用いて、個別要素法 によるシミュレーションによりじゃかごの挙動を求める
ことを特徴とするじゃかごの挙動解析方法。
【請求項4】
前記収容体の上面および/または下面、および/または前記収容体の側面に位置する前記網状部材の変形過程を、拘束または非拘束の条件においてシミュレーションする
ことを特徴とする請求項3記載のじゃかごの挙動解析方法。
【請求項5】
軸方向に長い線材の解析モデルであって、
該線材に、
該線材の軸方向に沿って並んで配設された複数の粒子と、
該複数の粒子における隣接する粒子間に、該粒子間の隙間を埋めるように設けられた連結部材と、によって構成されたモデルを採用しており、
前記複数の粒子における隣接する粒子間には、該粒子同士が常に接触した状態に保たれかつ該粒子間で滑りが生じない接触条件を採用し、
前記連結部材と前記粒子との間には、両者の間で滑りが生じない接触条件を採用している
ことを特徴とする線材の解析モデル。
【請求項6】
前記複数の粒子における隣接する粒子同士は点接触し、前記粒子と前記連結部材との間は面接触する接触条件を採用している
ことを特徴とする請求項5記載の線材の解析モデル。
【請求項7】
請求項5または6記載の線材の解析モデルを用いて、個別要素法 によるシミュレーションにより線材の変形を求める
ことを特徴とする線材の変形解析方法。
【請求項1】
網状部材によって形成される収容体と、該収容体内に収容された中詰材とからなるじゃかごの解析モデルであって、
前記中詰材には、
複数の粒状体からなるモデルを採用しており、
前記収容体の網状部材には、
該網状部材を形成する線材が、その構成要素として、該線材の軸方向に沿って並んで配設された複数の粒子と、該複数の粒子における隣接する粒子間に該粒子間の隙間を埋めるように設けられた連結部材とを有するモデルを採用しており、
前記中詰材の隣接する粒状体間には、該粒状体間の滑りおよび接触離間を考慮した接触条件を採用し、
前記網状部材を形成する同一の線材中の隣接する粒子間には、該粒子同士が常に接触した状態に保たれかつ該粒子間で滑りが生じない接触条件を採用し、
前記網状部材を形成する同一の線材中の連結部材と粒子との間には、両者の間で滑りが生じずかつ離間しない接触条件を採用し、
前記網状部材を形成する線材のうち、異なる線材中の構成要素間には、該構成要素間の滑りおよび接触離間を考慮した接触条件を採用し、
前記中詰材の粒状体と前記収容体の線材を構成する構成要素との間には、両者間の滑りおよび接触離間を考慮した接触条件を採用している
ことを特徴とするじゃかごの解析モデル。
【請求項2】
前記網状部材を形成する線材において、
前記複数の粒子における隣接する粒子同士は点接触し、前記粒子と前記連結部材との間は面接触する接触条件を採用している
ことを特徴とする請求項1記載のじゃかごの解析モデル。
【請求項3】
請求項1または2記載のじゃかごの解析モデルを用いて、個別要素法 によるシミュレーションによりじゃかごの挙動を求める
ことを特徴とするじゃかごの挙動解析方法。
【請求項4】
前記収容体の上面および/または下面、および/または前記収容体の側面に位置する前記網状部材の変形過程を、拘束または非拘束の条件においてシミュレーションする
ことを特徴とする請求項3記載のじゃかごの挙動解析方法。
【請求項5】
軸方向に長い線材の解析モデルであって、
該線材に、
該線材の軸方向に沿って並んで配設された複数の粒子と、
該複数の粒子における隣接する粒子間に、該粒子間の隙間を埋めるように設けられた連結部材と、によって構成されたモデルを採用しており、
前記複数の粒子における隣接する粒子間には、該粒子同士が常に接触した状態に保たれかつ該粒子間で滑りが生じない接触条件を採用し、
前記連結部材と前記粒子との間には、両者の間で滑りが生じない接触条件を採用している
ことを特徴とする線材の解析モデル。
【請求項6】
前記複数の粒子における隣接する粒子同士は点接触し、前記粒子と前記連結部材との間は面接触する接触条件を採用している
ことを特徴とする請求項5記載の線材の解析モデル。
【請求項7】
請求項5または6記載の線材の解析モデルを用いて、個別要素法 によるシミュレーションにより線材の変形を求める
ことを特徴とする線材の変形解析方法。
【図1】

【図3】
【図4】
【図5】
【図6】
【図7】
【図14】
【図2】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図3】
【図4】
【図5】
【図6】
【図7】
【図14】
【図2】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−165025(P2010−165025A)
【公開日】平成22年7月29日(2010.7.29)
【国際特許分類】
【出願番号】特願2009−4695(P2009−4695)
【出願日】平成21年1月13日(2009.1.13)
【出願人】(304028346)国立大学法人 香川大学 (285)
【Fターム(参考)】
【公開日】平成22年7月29日(2010.7.29)
【国際特許分類】
【出願日】平成21年1月13日(2009.1.13)
【出願人】(304028346)国立大学法人 香川大学 (285)
【Fターム(参考)】
[ Back to top ]