
ひび割れ検出方法
【課題】撮影されたコンクリート表面に、実際のひび割れと類似した汚れや染み、撮影ムラ、型枠跡などが存在する場合でも、高い精度で実際のひび割れのみを検出することのできるひび割れ検出方法を提供すること。
【解決手段】ウェーブレット画像を作成するステップ、注目画素のウェーブレット係数が閾値よりも大きな場合は注目画素をひび割れと判定し、小さな場合は注目画素をひび割れでないと判定し、局所領域および注目画素を変化させながら注目画素のウェーブレット係数と閾値との比較をおこない、ひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない、さらに輪郭線追跡処理をおこなうことで二値化画像を作成するステップ、残りのノイズを除去してひび割れ画像を作成するステップ、細線化処理を実行して細線化画像を作成し、ひび割れ幅を推定するステップ、からなるひび割れ検出方法である。
【解決手段】ウェーブレット画像を作成するステップ、注目画素のウェーブレット係数が閾値よりも大きな場合は注目画素をひび割れと判定し、小さな場合は注目画素をひび割れでないと判定し、局所領域および注目画素を変化させながら注目画素のウェーブレット係数と閾値との比較をおこない、ひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない、さらに輪郭線追跡処理をおこなうことで二値化画像を作成するステップ、残りのノイズを除去してひび割れ画像を作成するステップ、細線化処理を実行して細線化画像を作成し、ひび割れ幅を推定するステップ、からなるひび割れ検出方法である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、コンクリート表面に生じているひび割れの検出をおこなうひび割れ検出方法に係り、特に、撮影されたコンクリート表面の汚れや照明条件などによってひび割れの検出が困難な場合においても、簡易に高精度のひび割れ検出をおこなうことのできるひび割れ検出方法に関するものである。
【背景技術】
【0002】
コンクリート表面上のひび割れを検出する方法としては、従来、調査員がスケールを使用しながら目視観察をおこない、ひび割れの幅や長さを測定する方法が一般的であった。しかし、この目視観察による方法は調査員の測定技量などによって精度のばらつきが大きくなることや、ひび割れが大量に存在する場合においては大量の情報を正確に処理するために莫大な労力および時間を要するといった問題があった。
【0003】
上記の問題に対して、コンクリート表面の撮影画像をコンピュータに取り込み、画像をひび割れ領域とそれ以外の領域とに2値化処理する画像処理手法が適用されている。画像の2値化処理とは、ある濃度値に対して画像の濃度を0または1に表現することであり、例えば、入力画像f(i,j)に対して2値化処理で得られる2値化画像b(i,j)はb(i,j)=1(f(i,j)>k)、0(f(i,j)≦k)となる。ここで、kは2値化する際の閾値であり、したがって2値化画像の良し悪しは閾値kの選定によって決まるといってよい。
【0004】
従来の閾値を求める手法としては、固定閾値または可変閾値による処理方法がある。固定閾値による処理方法には、Pタイル法やモード法、相関比を用いた方法などが挙げられる。固定閾値による処理方法は、対象画像の濃度ヒストグラムを作成し、画像の背景(コンクリート表面)の濃度値とひび割れの濃度値との間に明確な谷が現れるような双峰性のヒストグラムが得られる場合において有効な方法である。
【0005】
一方、可変閾値による処理方法は、照明条件などによって撮影ムラが生じ、背景の濃度値と対象部分の濃度値が画像全体で一定でない場合に有効な方法である。この可変閾値処理法は、注目している画素を中心とする局所領域の平均濃度値を閾値とする方法である。この方法の欠点は、背景領域の微妙な濃淡変化に応じて、例えばひび割れ以外のノイズが多い画像となってしまう点である。
【0006】
従来の画像処理方法は、撮影された入力画像に対して閾値を決定し、2値化処理をおこないながらひび割れの抽出をおこなうものである。すなわち、この一般的な処理の流れは次のようになる。1)撮影画像をコンピュータに取り込んで入力画像を作成する。2)入力画像の濃度の補正をする。3)2値化処理をおこなってひび割れの抽出をおこなう。
【0007】
上記する従来の画像処理法は、濃度が一様なコンクリート表面上のひび割れの検出においては比較的高精度のひび割れ検出が可能である。しかし、実際のコンクリート構造物の表面は様々な汚れを含んでおり、さらにはひび割れの濃度も、ひび割れの幅や深度などに応じてばらつきがあるのが一般的である。このようなコンクリート表面に対して従来の画像処理法を用いると、ひび割れの抽出に際しては様々な問題が生じ得る。例えば、固定閾値処理の場合において、コンクリート表面上の汚れ領域とひび割れ領域が同程度の濃度値である場合には、これらを2値化処理することが極めて困難となる。濃度ヒストグラムが双峰性を呈していて、閾値を容易に決定できたとしても、ひび割れ領域と判断される範囲には汚れ領域が含まれる可能性が極めて高くなる。また、逆に、ひび割れ周辺部の汚れ領域を含ませないような閾値をあらたに設定しようとすると、今度は他のひび割れ領域を除外してしまうことになってしまう。
【0008】
可変閾値処理の場合には、コンクリート表面上の汚れが多くなるにしたがって、ひび割れ抽出画像中にひび割れ以外のノイズが多く含まれることになり、場合によってはひび割れ抽出画像を一見しても、どの部分がひび割れ領域なのか全く判別できないこととなる。
【0009】
上記する従来手法の問題に対して本発明者等は、撮影されたコンクリート表面の汚れや照明条件などによってひび割れの検出が困難な場合においても、簡易に高精度のひび割れ検出をおこなうことのできるひび割れ検出方法を発案し、特許文献1にその開示をおこなっている。このひび割れ検出方法は、対比される2つの濃度に対応したウェーブレット係数を算定するとともに、2つの濃度をそれぞれ変化させた場合のウェーブレット係数を算定してウェーブレット係数テーブルを作成し、ひび割れ検出対象であるコンクリート表面の撮影画像をコンピュータに入力して入力画像とし、この入力画像をウェーブレット変換することによってウェーブレット画像を作成するステップ、ウェーブレット係数テーブル内において局所領域内の近傍画素の平均濃度と注目画素の濃度に対応するウェーブレット係数を閾値とし、注目画素のウェーブレット係数が閾値よりも大きな場合はこの注目画素をひび割れと判定し、閾値よりも小さな場合は注目画素をひび割れでないと判定し、局所領域および注目画素を変化させながら注目画素のウェーブレット係数と閾値との比較をおこなうことでひび割れ抽出画像を作成するステップ、からなる検出方法である。
【0010】
この検出方法では、さらに輪郭線追跡処理により、任意の画素に対してこれに隣接する8方向の画素を対象に繋がりのある画素を連結し、連結された画素の集合体にラベリングをおこなっている。ここで、ラベリングごとに構成画素の数(もしくは対応する面積)がその閾値よりも小さな場合にラベリングされた集合体をノイズと見なして除去するようにしている。
【0011】
上記するウェーブレット変換を適用してなるひび割れ検出方法によってその検出精度は格段に向上するものの、本発明者等はこのひび割れ検出方法に関し、解析パラメータとしてウェーブレット係数値とウェーブレット係数テーブル内の閾値との許容値を25、ノイズ除去のための閾値として輪郭線追跡処理から求められるひび割れと判定された画素の一塊の個数を10(この値以下であればこの一塊の画素を除去)で計算した結果、ひび割れ以外の多くのノイズが検出されており、そのさらなる改良が必要となっている。
【0012】
なお、ひび割れ判定の閾値を大きくする、もしくはノイズ除去の閾値を大きくすることによってひび割れ以外のノイズ部分を減少させることはできるが、その一方で一部の細かいひび割れや不連続なひび割れを検出しない可能性が生じ易くなってしまい、得策とは言い難い。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特開2006−162583号公報
【発明の概要】
【発明が解決しようとする課題】
【0014】
本発明は上記する問題に鑑みてなされたものであり、撮影されたコンクリート表面に、実際のひび割れと類似した汚れや染み、撮影ムラ、型枠跡などが存在する場合でも、高い精度で実際のひび割れのみを検出することのできるひび割れ検出方法を提供することを目的としている。
【課題を解決するための手段】
【0015】
前記目的を達成すべく、本発明によるひび割れ検出方法は、コンクリート表面に生じているひび割れの検出をおこなうひび割れ検出方法であって、対比される2つの濃度に対応したウェーブレット係数を算定するとともに、この2つの濃度をそれぞれ変化させた場合のウェーブレット係数を算定してウェーブレット係数テーブルを作成し、ひび割れ検出対象であるコンクリート表面の撮影画像をコンピュータに入力して入力画像とし、この入力画像をウェーブレット変換することによってウェーブレット画像を作成する第1のステップ、ウェーブレット係数テーブル内において局所領域内の近傍画素の平均濃度と注目画素の濃度に対応するウェーブレット係数をウェーブレット係数に関する閾値とし、注目画素のウェーブレット係数が前記閾値よりも大きな場合は注目画素をひび割れと判定し、小さな場合は注目画素をひび割れでないと判定し、局所領域および注目画素を変化させながら注目画素のウェーブレット係数と前記閾値との比較をおこない、ひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない、さらに輪郭線追跡処理をおこなうことで二値化画像を作成する第2のステップ、二値化画像におけるひび割れに対して残りのノイズを除去してひび割れ画像を作成する第3のステップ、細線化処理を実行してその中心線で構成されるひび割れの細線化画像を作成し、この細線化画像に対応するウェーブレット係数から大小2つのウェーブレット係数を抽出するとともに、2つのウェーブレット係数に対応する相対的に大きなひび割れ幅と小さなひび割れ幅を設定し、2つのウェーブレット係数、および、相対的に大きなひび割れ幅と小さなひび割れ幅で構成される第1の関係式に前記細線化画像に対応するウェーブレット係数を代入してひび割れ幅を推定する第4のステップ、からなるものである。
【0016】
ウェーブレット(wavelet)とは、小さな波という意味であり、局在性を持つ波の基本単位を、ウェーブレット関数を用いた式で表現することができる。このウェーブレット関数を拡大または縮小することにより、時間情報や空間情報と周波数情報を同時に解析することが可能となる。このウェーブレット係数を、ひび割れを有するコンクリート表面に適用する場合のこの係数の特徴としては、コンクリート表面の濃度と、ひび割れの濃度と、ひび割れ幅に依存するということである。例えば、ひび割れ幅が大きくなるにつれてウェーブレット係数の値は大きくなる傾向があり、また、ひび割れの濃度が濃くなるにつれて(黒色に近づくにつれて)ウェーブレット係数の値は大きくなる傾向がある。
【0017】
ウェーブレット変換によって算定されるウェーブレット係数を用いて、ひび割れの検出をおこなうアルゴリズムは以下のようになる。まず、コンクリート表面の撮影画像とウェーブレット関数との内積よりウェーブレット係数を求める。このウェーブレット係数を256階調に変換することで、連続量を持ったウェーブレット画像が作成できる。
【0018】
ウェーブレット係数は、上記するようにひび割れ幅やひび割れの濃度、コンクリート表面の濃度によって変化することから、擬似的に作成されたデータを用いてひび割れの濃度とコンクリート表面の濃度に関するウェーブレット係数を各階調ごとに算定しておき、ウェーブレット係数テーブルを作成しておく。このウェーブレット係数テーブルにある各階調ごとのウェーブレット係数が、ひび割れ検出の際の閾値となる。例えば、対比される2つの濃度(一方の濃度をコンクリート表面の濃度、他方の濃度をひび割れの濃度と仮定することができる)に対応するウェーブレット係数(閾値)がウェーブレット係数テーブルを参照すれば一義的に決定される。したがって、後述するように、撮影画像において対比される2つの濃度間のウェーブレット係数を算定した際に、このウェーブレット係数がウェーブレット係数テーブルの閾値よりも大きな場合は、ひび割れであると判断できるし、閾値よりも小さな場合はひび割れでないと判断することができる。
【0019】
このウェーブレット係数テーブルを作成する際の擬似的なデータは特に限定するものではないが、例えば、ひび割れ幅が1画素(1ピクセル)〜5画素(5ピクセル)までの中で、各画素幅のひび割れごとに、コンクリート表面の階調とひび割れの階調に対応するウェーブレット係数を算定する。閾値の設定に際しては、例えば、ひび割れ幅が1画素の場合のウェーブレット係数のうち、ひび割れに対応するウェーブレット係数を選定し、ひび割れ幅が5画素の場合のウェーブレット係数のうち、ひび割れ領域でない箇所のウェーブレット係数を選定し、これら2つのウェーブレット係数の平均値をもって任意の階調における閾値とすることができる。
【0020】
本発明のひび割れ検出方法においては、まず、第1のステップにおいて、上記するウェーブレット係数テーブルを作成しておくとともに、撮影画像に対してレンズ収差補正やあおり補正などの補正処理をおこない、これをコンピュータに入力して入力画像とし、この入力画像をウェーブレット変換することによってウェーブレット画像を作成する。このウェーブレット画像の作成は、コンピュータ内部において以下のように実施される。まず、適宜に設定された広域領域(例えば30×30画素の領域)に対してウェーブレット係数を算定する。次に、この広域領域から一画素移動した広域領域(同じように例えば30×30画素の領域であって、移動前の30×30画素の領域とほとんどの画素が共通している)で、同じようにウェーブレット係数を算定する。この操作を入力画像全体に繰り返すことにより、コンピュータ内部には、ウェーブレット係数の連続量からなるウェーブレット画像が作成される。
【0021】
次に第2のステップにおいて、このウェーブレット係数の連続量からなるウェーブレット画像において、ウェーブレット係数テーブル内の閾値(ウェーブレット係数)とウェーブレット画像を構成するウェーブレット係数とを比較し、画像を構成するウェーブレット係数が閾値よりも大きな場合はひび割れと判断し(画面上では例えば白色)、閾値よりも小さな場合はひび割れでないと判断する(画面上では例えば黒色)。そして、この操作をウェーブレット画像全体でおこなうことにより、黒い背景色内に白いひび割れが描き出された途中段階の二値化画像が作成される。
【0022】
この途中段階の二値化画像においてひび割れと判定された画素に対して、ひび割れとノイズの判別処理をおこなう。
【0023】
このひび割れとノイズの判別処理法の一実施の形態として、ヘッセ行列の固有値解析を適用する方法を挙げることができる。
【0024】
より具体的には、ヘッセ行列の2つの固有値λ1、λ2の関係から二次元濃淡画像の局所構造である線状構造と塊状構造それぞれの関係式を求め、そのいずれかの構造であればひび割れと判定し、いずれの構造でもない場合はノイズと判定する方法を挙げることができる。
【0025】
途中段階の二値化画像においてひび割れと判定された画素に対してひび割れとノイズの判別処理をおこなった後に、輪郭線追跡処理をおこなうことで二値化画像が作成される。
【0026】
この輪郭線追跡処理は、ひび割れとノイズの判別処理によっても依然として残っているノイズを除去するものである。輪郭線追跡処理は、ある任意の画素(ひび割れと判断されている画素)から出発して、隣接する画素がひび割れ箇所の場合には出発画素と接続し、さらに隣接する画素がひび割れ箇所の場合にはさらに双方を接続し、最終的に出発画素に閉合した場合(例えば、第1画素、第2画素、…、第n−1画素、第n画素、第1画素の順に接続される場合)や、次に繋がるひび割れ箇所が存在しなくなった場合に終了するものである。この輪郭線追跡処理によれば、ループ状に閉合するようなひび割れラインや、複数の屈曲部を備えて線状に伸びるひび割れラインなど、適宜のひび割れラインが作成されることになる。この際、繋げられる画素数の最小数を予め設定しておくことにより、この設定数以下の画素はすべてひび割れでないとして、画面のひび割れ表示から削除することができる。
【0027】
次に、第3のステップにおいて、第2のステップで作成された二値化画像に対して輪郭線追跡処理等によっても除去できない残りのノイズを除去してひび割れ画像を作成する。
【0028】
このノイズ除去は、最終的なノイズの除去となり、既述するひび割れとノイズの判別処理や輪郭線追跡処理によるノイズ除去に続くものである。ここでは、たとえば、公知の画像編集ソフトを使用して、ドット部を除去したり、所定長さ未満の線分を非クラック部としてノイズを除去する等の方法が適用できる。
【0029】
ノイズの除去が終了してひび割れ画像が作成されたら、第4のステップとして、そのひび割れ画像に対して細線化処理を実行することにより、ひび割れの中心線で構成され、たとえばひび割れ全体が1画素幅(1ピクセル幅)を有する細線化画像を作成する。本発明者等の検証によれば、任意幅のひび割れにおいて、その中心線部分が最も濃度が濃くなることが分かっており、したがって、細線化処理により、任意幅で任意長さのひび割れを構成するひび割れにおいて、各部位のひび割れ濃度を設定することができる。
【0030】
任意の細線化画像には1本もしくは複数本のひび割れが包含されているが、この細線化画像の中から、大小2つのウェーブレット係数を選定する。この2つのウェーブレット係数の選定は、任意に選定したウェーブレット係数と、このウェーブレット係数よりも相対的に小さな(または大きな)ウェーブレット係数であれば特に限定されるものではないが、最終的にひび割れを推定する上で、細線化画像中のウェーブレット係数の中で、最大値と最小値を選定するのが好ましい。この場合、最大値は、分解能のひび割れ、すなわち、撮影機器の種類(デジタル一眼レフカメラ、ハイビジョンデジタルカメラ、デジタルビデオカメラなど)、使用されるレンズの種類、撮影距離などの撮影状況によって決定される分解能のひび割れ幅に設定することができる。一方、最小値は、画像解析で検出可能なひび割れ幅に設定できる。
【0031】
次いで、上記する選定された2つのウェーブレット係数(たとえば最小値と最大値)、およびこの2つのウェーブレット係数に対応するひび割れ幅を用いて、細線化画像のウェーブレット係数を変数としたひび割れ幅の推定式を設定し、ひび割れ幅の推定をおこなう。
【0032】
最後に、推定されたひび割れ幅に基づくひび割れデータ、すなわち、全ひび割れ長さの算定やひび割れ幅ごとのひび割れ長さの算定、ひび割れ幅ごとの分布図の作成、ひび割れ展開図の作成などをおこない、該ひび割れデータから所望の情報を抽出することが可能となる。
【0033】
本発明者等の検証によれば、上記するひび割れ検出方法を適用することにより、特許文献1で示す従来の方法に比して特に低い空間分解能で撮影した画像に対して高いノイズ除去効果が得られることが実証されている。
【発明の効果】
【0034】
以上の説明から理解できるように、本発明のひび割れ検出方法によれば、注目画素のウェーブレット係数と閾値との比較をおこない、ひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない、さらに輪郭線追跡処理をおこなうことで二値化画像を作成する第2のステップを有することにより、特に低い空間分解能で撮影した画像に対して高いノイズ除去効果を得ることができ、ひび割れを高い精度で検出することが可能となる。
【図面の簡単な説明】
【0035】
【図1】入力画像と局所領域の関係を示した模式図である。
【図2】局所領域と注目画素の関係を示した模式図である。
【図3】本発明のひび割れ検出方法を示したフローである。
【図4】擬似画像を示した図である。
【図5】図4の擬似画像のウェーブレット係数の鳥瞰図である。
【図6】ウェーブレット係数テーブルの一実施の形態を示した図である。
【図7】図3のフローにおける二値化画像の作成方法の一実施の形態のフロー図である。
【図8】図3のフローにおけるひび割れ幅の推定値の算定方法の他の実施の形態のフロー図である。
【図9】本発明の検出方法の検出精度に関する検証結果を示す図であり、(a)は空間分解能0.1mm/ピクセルの撮影画像を示した写真図であり、(b)は従来方法による二値化画像を示した図であり、(c)は本発明の方法による二値化画像を示した図である。
【図10】本発明の検出方法の検出精度に関する検証結果を示す図であり、(a)は空間分解能0.2mm/ピクセルの撮影画像を示した写真図であり、(b)は従来方法による二値化画像を示した図であり、(c)は本発明の方法による二値化画像を示した図である。
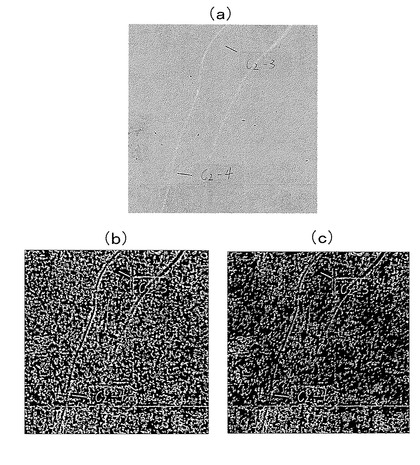
【図11】本発明の検出方法の検出精度に関する検証結果を示す図であり、(a)は空間分解能0.4mm/ピクセルの撮影画像を示した写真図であり、(b)は従来方法による二値化画像を示した図であり、(c)は本発明の方法による二値化画像を示した図である。
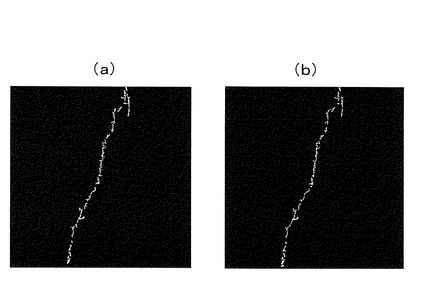
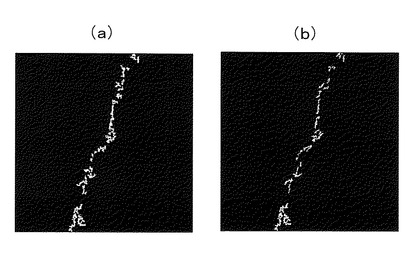
【図12】空間分解能0.4mm/ピクセルの撮影画像に対するひび割れ画像を示した図であって、(a)は従来方法によるひび割れ画像を示した図であり、(b)は本発明の方法によるひび割れ画像を示した図である。
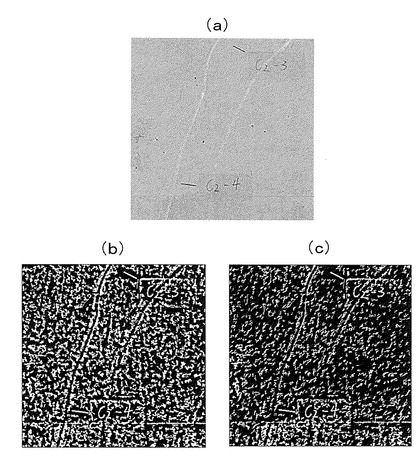
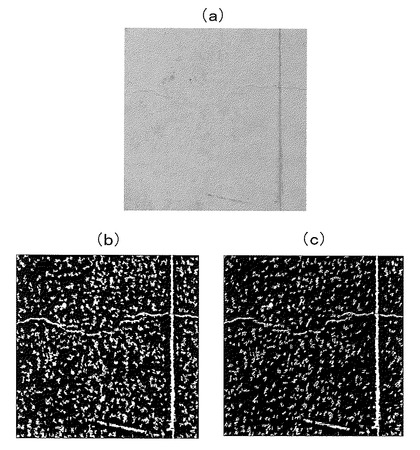
【図13】本発明の検出方法の検出精度に関する検証結果を示す図であり、(a)は空間分解能0.6mm/ピクセルの撮影画像を示した写真図であり、(b)は従来方法による二値化画像を示した図であり、(c)は本発明の方法による二値化画像を示した図である。
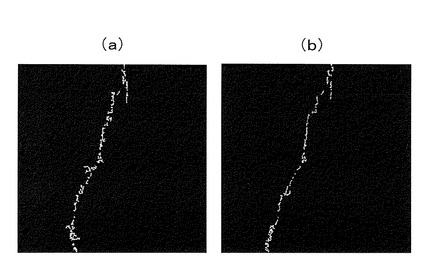
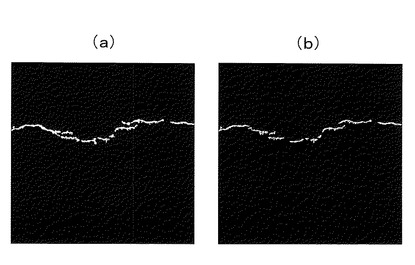
【図14】図13の撮影画像に対するひび割れ画像を示した図であって、(a)は従来方法によるひび割れ画像を示した図であり、(b)は本発明の方法によるひび割れ画像を示した図である。
【図15】本発明の検出方法の検出精度に関する検証結果を示す図であり、(a)は空間分解能0.8mm/ピクセルの撮影画像を示した写真図であり、(b)は従来方法による二値化画像を示した図であり、(c)は本発明の方法による二値化画像を示した図である。
【図16】図15の撮影画像に対するひび割れ画像を示した図であって、(a)は従来方法によるひび割れ画像を示した図であり、(b)は本発明の方法によるひび割れ画像を示した図である。
【図17】本発明の検出方法の検出精度に関する検証結果を示す図であり、(a)は空間分解能0.8mm/ピクセルで図15とは別の撮影画像を示した写真図であり、(b)は従来方法による二値化画像を示した図であり、(c)は本発明の方法による二値化画像を示した図である。
【図18】図17の撮影画像に対するひび割れ画像を示した図であって、(a)は従来方法によるひび割れ画像を示した図であり、(b)は本発明の方法によるひび割れ画像を示した図である。
【発明を実施するための形態】
【0036】
以下、図面を参照して本発明のひび割れ検出方法の実施の形態を説明する。
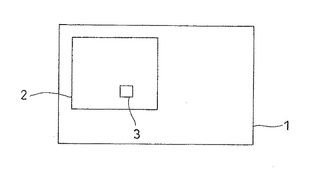
図1は、入力画像と局所領域の関係を示した模式図である。本発明のひび割れ検出方法では、入力画像1における広域領域2でウェーブレット変換をおこない、広域領域2の中心である局所領域3におけるひび割れの検出をおこなうものである。入力画像1内をくまなく広域領域2を上下左右に平行移動して、入力画像1内におけるひび割れの検出をおこなう。この方法により、従来の固定閾値法のように、例えば入力画像1内で一つの閾値を決める方法に比べて、精度のよいひび割れの検出をおこなうことができる。
【0037】
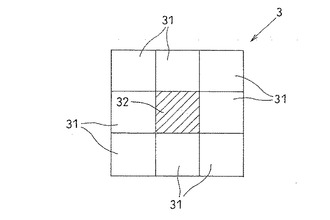
図2は、局所領域3を拡大した図であり、図示する実施形態では、たとえば3×3の9つの画素(8つの近傍画素31,31,…と、中央に位置する注目画素32)を対象としてひび割れ判定をおこなう。なお、ウェーブレット係数の算定は、図1における広域領域2を対象としておこなわれる。
【0038】
ここで、ウェーブレット関数(マザーウェーブレット関数)を用いたウェーブレット変換をおこなうことでウェーブレット係数を算定する算定式を以下に示す。
【0039】
【数1】

【0040】
【数2】
【0041】
【数3】
【0042】
ここで、f(x、y)は入力画像(ここで、x、yは2次元入力画像中の任意の座標である)を、Ψはマザーウェーブレット関数(ガボール関数)を、(x0、y0)はΨの平行移動量を、akはΨの拡大や縮小を(ここで、akは周波数の逆数であって、幾つかの周波数領域について計算するための周波数幅を整数kで示した値)、f0は中心周波数を、σはガウス関数の標準偏差を、θは波の進行方向を表す回転角を、(x’、y’)は(x、y)を角度θだけ回転させた座標を、それぞれ示している。
【0043】
ここで、数式1を用いて計算した複数のθ、kに対して、ウェーブレット係数Ψの累計値C(x0、y0)を求めたのが数式4となる。
【0044】
【数4】
【0045】
上記のパラメータは、任意に設定できるが、例えば、σを0.5〜2に、akは0〜5に、f0は0.1に、回転角は0〜180度に、それぞれ設定できる。
【0046】
数式4における平行移動量(x0、y0)は、注目画素の位置に対応するものであり、注目画素の位置を順次移動させることによって、ウェーブレット係数の連続量(C(x0、y0))が算定でき、この連続量を図示することによってウェーブレット画像が作成できる。
【0047】
広域領域2を構成する全画素に対して、ウェーブレット係数を上算定式に基づいて算定した後、注目画素を一つ左右または上下に移動させてできる広域領域2の全画素において同様にウェーブレット係数を算定する。このウェーブレット係数算定を入力画像全体で実施することにより、適宜の範囲内における構成画素がそれぞれのウェーブレット係数を備えたウェーブレット画像(ウェーブレット係数の連続量からなる画像)を作成することができる。
【0048】
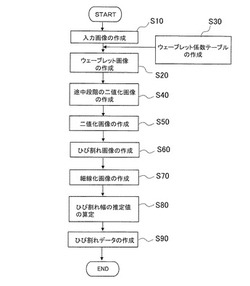
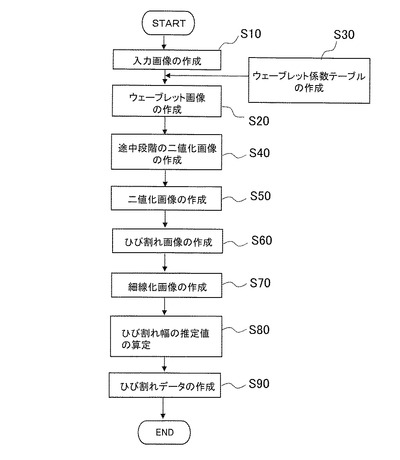
次に、図3に基づいて、ひび割れ検出方法の一実施形態を説明する。
【0049】
CCDカメラ等のデジタルカメラで撮影されたコンクリート表面の撮影画像をコンピュータに取り込むことにより、入力画像の作成(ステップS10)がおこなわれる。
【0050】
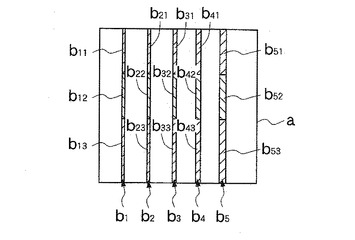
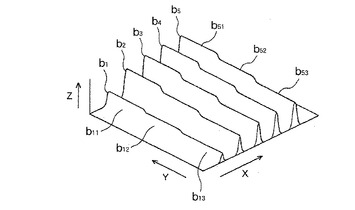
次に、入力画像とは何らの関係もない、対比する2つの濃度からなる擬似画像に対して、ウェーブレット係数の算定をおこなう。例えば、図4に示すように、コンクリート表面と仮定される背景色a(例えば、背景色のR、G、Bが、255,255,255とする)と、ひび割れと仮定される線分b1〜b5からなる擬似画像のウェーブレット係数を求める。ここで、線分b1〜b5は、線幅が順に1画素(1ピクセル)〜5画素(5ピクセル)まで変化しており、さらに、各線分は、3種類の濃度を備えている(例えば、線分b1では、濃度の濃い順に、b11(黒色)、b12(薄い黒色)、b13(灰色)と変化している)。この擬似画像に対してウェーブレット変換をおこなうことで算定されるウェーブレット係数の鳥瞰図を示したのが図5である。図5において、X軸は線分の幅を、Y軸は線分の色の濃度を、Z軸はウェーブレット係数をそれぞれ示している。この線幅の設定は、最終的に抽出したいひび割れ幅の最大値によって設定すればよい。なお、画素幅ごとに、ひび割れ領域のウェーブレット係数と、ひび割れ領域以外のウェーブレット係数が算定できる。
【0051】
本実施形態では、コンクリート表面と仮定される任意の濃度(階調)と、ひび割れと仮定される任意の濃度(階調)に対応する閾値(ウェーブレット係数)を算定するにあたり、例えば、ひび割れ幅が1画素幅の場合におけるひび割れ領域のウェーブレット係数と、ひび割れ幅が5画素幅の場合におけるひび割れ領域以外のウェーブレット係数との平均値をもって、設定したひび割れ幅範囲内において対象となる階調に対応した閾値としている。この閾値の設定は、勿論任意でかまわない。
【0052】
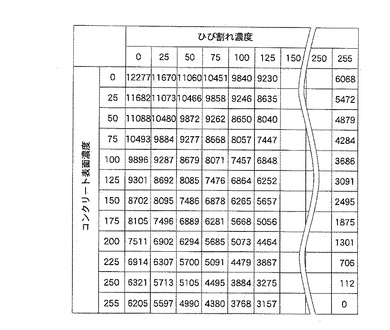
対比する2つの濃度の組み合わせをそれぞれ0〜255の256階調でおこなうことで、図6に示すようなウェーブレット係数テーブルの作成(図3のステップS30)がおこなわれる。なお、この作業は、図示するフロー位置でなくともよく、例えば、入力画像の作成前であってもかまわない。
【0053】
図3に戻り、入力画像をウェーブレット変換することにより、ウェーブレット画像の作成(ステップS20)がおこなわれる。
【0054】
ウェーブレット画像は、上記するように各画素が固有のウェーブレット係数を備えた連続量からなるものであり、各画素のウェーブレット係数を対応するウェーブレット係数テーブルのウェーブレット係数(閾値)と比較することにより、黒い背景色内に白いひび割れが描き出された途中段階の二値化画像が作成される(ステップS40)。
【0055】
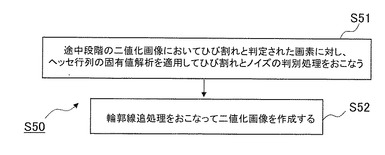
次に、図7で示すように、途中段階の二値化画像においてひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない(ステップS51)、次いで輪郭線追跡処理をおこなうことにより(ステップS52)、二値化画像が作成される(図3のステップS50)。
【0056】
ここで、ひび割れとノイズの判別処理の具体的な処理方法を概説する。本発明のひび割れ検出方法では、この判別処理に当たり、ヘッセ行列の2つの固有値λ1、λ2の関係から二次元濃淡画像の局所構造である線状構造と塊状構造それぞれの関係式を求め、そのいずれかの構造であればひび割れと判定し、いずれの構造でもない場合はノイズと判定する方法を適用する。
【0057】
画像の各画素(x、y)に輝度値f(x、y)を高さ方向として、(x、y)を連続変数とすれば画像は三次元曲面と解釈することができる。この曲面f(x、y)を微分することにより特徴点を求める。ここで、注目画素の注目点(x、y)のヘッセ行列は、画像の輝度値をxおよびy方向に2階微分した要素から構成される行列であり、以下の数式5で表すことができる。
【0058】
【数5】
【0059】
このヘッセ行列の固有値λ1、λ2の関係に基づいて、二次元濃淡画像の局所構造である線状構造または塊状構造の識別をおこなう。
【0060】
(線状構造の場合)
画素の線状性が高いことを意味する。ここでは、各画素の線状性の判定条件を以下の数式6で定義する。
【0061】
【数6】
【0062】
(塊状構造の場合)
画素の塊状性が高いことを意味する。ここでは、各画素の塊状性の判定条件を以下の数式7で定義する。
【0063】
【数7】
【0064】
次いで、輪郭線追跡処理の内容を概説する。この輪郭線追跡処理は、各ひび割れ領域における任意のひび割れ画素を起点とし(第1画素)、例えば、この第1画素から反時計回りに隣接する画素に注目し、この隣接画素(第2画素)がひび割れ画素である場合には第1画素と第2画素を接続する。以後、同様に第2画素、第3画素、…、第n−1画素、第n画素とひび割れ画素の追跡をおこない、第n画素の次に起点となる第1画素がくる場合には、第一画素〜第n画素までを一つのひび割れ箇所(ひび割れライン)と判定する。あるいは、第n画素の次に続くひび割れ画素が存在しなくなった時点で、第1画素〜第n画素を一つのひび割れ箇所(ひび割れライン)と判定する。なお、ひび割れラインの中には、その途中で二股以上に分岐するようなひび割れも含まれる。この次数nの設定は任意であり、第1画素からの追跡数がこの設定された次数n以上の場合をひび割れと判定することにより、ノイズの一部が除去されてなる第1のひび割れ抽出画像が作成される。
【0065】
以上の方法で二値化画像が作成されたら、この二値化画像に対して画像編集ソフトを使用して、ドット部を除去する方法、所定長さ未満の線分を非クラック部として除去するといった方法を適用してノイズの最終除去をおこなってひび割れ画像を作成する(ステップS60)。
【0066】
次に、作成されたひび割れ画像に対して、それぞれのひび割れの中心線で構成され、たとえばひび割れ全体が1画素幅(1ピクセル幅)を有する細線化画像を作成する(ステップS70)。
【0067】
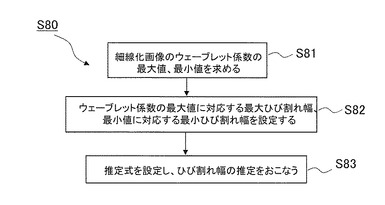
この細線化画像を使用してひび割れ幅の推定値を算定する(ステップS80)。ここで、このひび割れ幅の推定方法を図8に基づいて説明する。
【0068】
ステップS70で求められた細線化画像のウェーブレット係数の最大値と最小値を求め(ステップS81)、この最大値に対応する最大ひび割れ幅と最小値に対応する最小ひび割れ幅を設定する(ステップS82)。この最大値は、分解能のひび割れ幅に、最小値は画像解析で検出可能なひび割れ幅にそれぞれ設定できる。
【0069】
次に、ひび割れ幅の推定値を算定するための推定式を設定してひび割れ幅の推定をおこなう(ステップS83)。この推定式として、たとえば下式を使用することができる。
【0070】
【数8】
【0071】
ここで、Width:ひび割れ幅の推定値、Cmax、Cmin:細線化画像のウェーブレット係数の最大値、最小値、Wmax、Wmin:ウェーブレット係数の最大値、最小値に対応するひび割れ幅、WCは細線化画像のウェーブレット係数であって、本式の変数である。
【0072】
細線化画像のウェーブレット係数を定式に代入することによって対象となるひび割れのひび割れ幅を推定(特定)する。
【0073】
図3に戻り、ステップS80によってひび割れ幅の推定をおこなった後に、各ひび割れの分布状態、ひび割れ幅ごとのひび割れ数量などに関するテーブルや図面(ひび割れ展開図など)をデータとして作成する(ステップS90)。
【0074】
[本発明の検出方法の検出精度に関する検証とその結果]
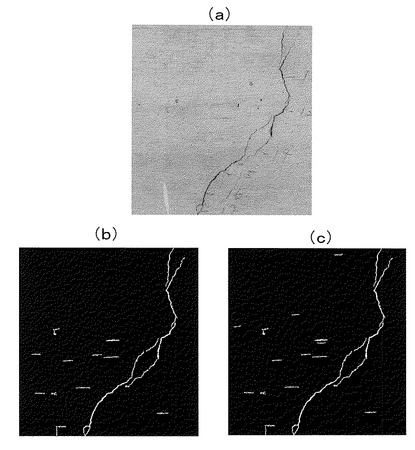
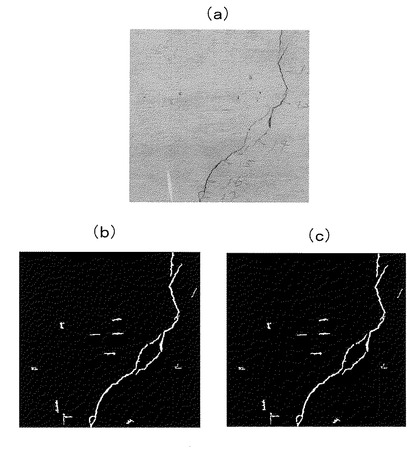
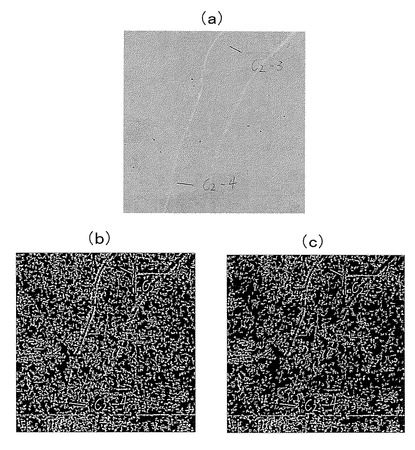
本発明者等は、空間分解能が0.1mm/ピクセル、0.2mm/ピクセル、0.4mm/ピクセル、0.6mm/ピクセル、0.8mm/ピクセルで撮影した6ケース(0.8mm/ピクセルは2画像)の画像について、特許文献1で示す従来の方法と上記で説明する本願発明の方法とでひび割れ検出解析をおこない、本願発明の方法によるノイズの低減効果について検証をおこなった。図9aは空間分解能0.1mm/ピクセルの撮影画像を示した写真図であり、図9bは従来方法による二値化画像を示した図であり、図9cは本発明の方法による二値化画像を示した図である。図10aは空間分解能0.2mm/ピクセルの撮影画像を示した写真図であり、図10bは従来方法による二値化画像を示した図であり、図10cは本発明の方法による二値化画像を示した図である。図11aは空間分解能0.4mm/ピクセルの撮影画像を示した写真図であり、図11bは従来方法による二値化画像を示した図であり、図11cは本発明の方法による二値化画像を示した図であり、図12aは従来方法によるひび割れ画像を示した図であり、図12bは本発明の方法によるひび割れ画像を示した図である。図13aは空間分解能0.6mm/ピクセルの撮影画像を示した写真図であり、図13bは従来方法による二値化画像を示した図であり、図13cは本発明の方法による二値化画像を示した図であり、図14aは従来方法によるひび割れ画像を示した図であり、図14bは本発明の方法によるひび割れ画像を示した図である。図15a、17aは空間分解能0.8mm/ピクセルの撮影画像を示した写真図であり、図15b、17bは従来方法による二値化画像を示した図であり、図15c、17cは本発明の方法による二値化画像を示した図であり、図16a、18aは従来方法によるひび割れ画像を示した図であり、図16b、18bは本発明の方法によるひび割れ画像を示した図である。また、以下、表1にノイズ除去低減率の比較表を示す。
【0075】
【表1】
【0076】
表1において、ピクセルの値は、二値化画像でひび割れと判定されたピクセル数の総和を表している。また、ノイズ低減率は従来の方法のピクセル数に対して、本発明の方法のノイズ軽減率で割った比率を表している。
【0077】
図9〜図18および表1より、高い空間分解能である0.1〜0.2mm/ピクセルではノイズ除去効果が確認できない。
【0078】
空間分解能が0.4mm/ピクセル、0.6mm/ピクセルになるとそれぞれ、20%程度、30%程度のノイズ除去効果が確認でき、ともに同一のひび割れ検出結果が得られている。
【0079】
空間分解能が0.8mm/ピクセルでは、35%程度のノイズ除去効果が確認でき、同一のひび割れ検出結果が得られている。
【0080】
以上の結果より、特に低い空間分解能の撮影画像に対して、本発明のひび割れ検出方法は高いノイズ除去効果を発揮することが実証されている。
【0081】
以上、本発明の実施の形態を、図面を用いて詳述してきたが、具体的な構成はこの実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲における設計変更等があっても、それらは本発明に含まれるものである。
【符号の説明】
【0082】
1…入力画像、2…広域領域、3…局所領域、31…近傍画素、32…注目画素
【技術分野】
【0001】
本発明は、コンクリート表面に生じているひび割れの検出をおこなうひび割れ検出方法に係り、特に、撮影されたコンクリート表面の汚れや照明条件などによってひび割れの検出が困難な場合においても、簡易に高精度のひび割れ検出をおこなうことのできるひび割れ検出方法に関するものである。
【背景技術】
【0002】
コンクリート表面上のひび割れを検出する方法としては、従来、調査員がスケールを使用しながら目視観察をおこない、ひび割れの幅や長さを測定する方法が一般的であった。しかし、この目視観察による方法は調査員の測定技量などによって精度のばらつきが大きくなることや、ひび割れが大量に存在する場合においては大量の情報を正確に処理するために莫大な労力および時間を要するといった問題があった。
【0003】
上記の問題に対して、コンクリート表面の撮影画像をコンピュータに取り込み、画像をひび割れ領域とそれ以外の領域とに2値化処理する画像処理手法が適用されている。画像の2値化処理とは、ある濃度値に対して画像の濃度を0または1に表現することであり、例えば、入力画像f(i,j)に対して2値化処理で得られる2値化画像b(i,j)はb(i,j)=1(f(i,j)>k)、0(f(i,j)≦k)となる。ここで、kは2値化する際の閾値であり、したがって2値化画像の良し悪しは閾値kの選定によって決まるといってよい。
【0004】
従来の閾値を求める手法としては、固定閾値または可変閾値による処理方法がある。固定閾値による処理方法には、Pタイル法やモード法、相関比を用いた方法などが挙げられる。固定閾値による処理方法は、対象画像の濃度ヒストグラムを作成し、画像の背景(コンクリート表面)の濃度値とひび割れの濃度値との間に明確な谷が現れるような双峰性のヒストグラムが得られる場合において有効な方法である。
【0005】
一方、可変閾値による処理方法は、照明条件などによって撮影ムラが生じ、背景の濃度値と対象部分の濃度値が画像全体で一定でない場合に有効な方法である。この可変閾値処理法は、注目している画素を中心とする局所領域の平均濃度値を閾値とする方法である。この方法の欠点は、背景領域の微妙な濃淡変化に応じて、例えばひび割れ以外のノイズが多い画像となってしまう点である。
【0006】
従来の画像処理方法は、撮影された入力画像に対して閾値を決定し、2値化処理をおこないながらひび割れの抽出をおこなうものである。すなわち、この一般的な処理の流れは次のようになる。1)撮影画像をコンピュータに取り込んで入力画像を作成する。2)入力画像の濃度の補正をする。3)2値化処理をおこなってひび割れの抽出をおこなう。
【0007】
上記する従来の画像処理法は、濃度が一様なコンクリート表面上のひび割れの検出においては比較的高精度のひび割れ検出が可能である。しかし、実際のコンクリート構造物の表面は様々な汚れを含んでおり、さらにはひび割れの濃度も、ひび割れの幅や深度などに応じてばらつきがあるのが一般的である。このようなコンクリート表面に対して従来の画像処理法を用いると、ひび割れの抽出に際しては様々な問題が生じ得る。例えば、固定閾値処理の場合において、コンクリート表面上の汚れ領域とひび割れ領域が同程度の濃度値である場合には、これらを2値化処理することが極めて困難となる。濃度ヒストグラムが双峰性を呈していて、閾値を容易に決定できたとしても、ひび割れ領域と判断される範囲には汚れ領域が含まれる可能性が極めて高くなる。また、逆に、ひび割れ周辺部の汚れ領域を含ませないような閾値をあらたに設定しようとすると、今度は他のひび割れ領域を除外してしまうことになってしまう。
【0008】
可変閾値処理の場合には、コンクリート表面上の汚れが多くなるにしたがって、ひび割れ抽出画像中にひび割れ以外のノイズが多く含まれることになり、場合によってはひび割れ抽出画像を一見しても、どの部分がひび割れ領域なのか全く判別できないこととなる。
【0009】
上記する従来手法の問題に対して本発明者等は、撮影されたコンクリート表面の汚れや照明条件などによってひび割れの検出が困難な場合においても、簡易に高精度のひび割れ検出をおこなうことのできるひび割れ検出方法を発案し、特許文献1にその開示をおこなっている。このひび割れ検出方法は、対比される2つの濃度に対応したウェーブレット係数を算定するとともに、2つの濃度をそれぞれ変化させた場合のウェーブレット係数を算定してウェーブレット係数テーブルを作成し、ひび割れ検出対象であるコンクリート表面の撮影画像をコンピュータに入力して入力画像とし、この入力画像をウェーブレット変換することによってウェーブレット画像を作成するステップ、ウェーブレット係数テーブル内において局所領域内の近傍画素の平均濃度と注目画素の濃度に対応するウェーブレット係数を閾値とし、注目画素のウェーブレット係数が閾値よりも大きな場合はこの注目画素をひび割れと判定し、閾値よりも小さな場合は注目画素をひび割れでないと判定し、局所領域および注目画素を変化させながら注目画素のウェーブレット係数と閾値との比較をおこなうことでひび割れ抽出画像を作成するステップ、からなる検出方法である。
【0010】
この検出方法では、さらに輪郭線追跡処理により、任意の画素に対してこれに隣接する8方向の画素を対象に繋がりのある画素を連結し、連結された画素の集合体にラベリングをおこなっている。ここで、ラベリングごとに構成画素の数(もしくは対応する面積)がその閾値よりも小さな場合にラベリングされた集合体をノイズと見なして除去するようにしている。
【0011】
上記するウェーブレット変換を適用してなるひび割れ検出方法によってその検出精度は格段に向上するものの、本発明者等はこのひび割れ検出方法に関し、解析パラメータとしてウェーブレット係数値とウェーブレット係数テーブル内の閾値との許容値を25、ノイズ除去のための閾値として輪郭線追跡処理から求められるひび割れと判定された画素の一塊の個数を10(この値以下であればこの一塊の画素を除去)で計算した結果、ひび割れ以外の多くのノイズが検出されており、そのさらなる改良が必要となっている。
【0012】
なお、ひび割れ判定の閾値を大きくする、もしくはノイズ除去の閾値を大きくすることによってひび割れ以外のノイズ部分を減少させることはできるが、その一方で一部の細かいひび割れや不連続なひび割れを検出しない可能性が生じ易くなってしまい、得策とは言い難い。
【先行技術文献】
【特許文献】
【0013】
【特許文献1】特開2006−162583号公報
【発明の概要】
【発明が解決しようとする課題】
【0014】
本発明は上記する問題に鑑みてなされたものであり、撮影されたコンクリート表面に、実際のひび割れと類似した汚れや染み、撮影ムラ、型枠跡などが存在する場合でも、高い精度で実際のひび割れのみを検出することのできるひび割れ検出方法を提供することを目的としている。
【課題を解決するための手段】
【0015】
前記目的を達成すべく、本発明によるひび割れ検出方法は、コンクリート表面に生じているひび割れの検出をおこなうひび割れ検出方法であって、対比される2つの濃度に対応したウェーブレット係数を算定するとともに、この2つの濃度をそれぞれ変化させた場合のウェーブレット係数を算定してウェーブレット係数テーブルを作成し、ひび割れ検出対象であるコンクリート表面の撮影画像をコンピュータに入力して入力画像とし、この入力画像をウェーブレット変換することによってウェーブレット画像を作成する第1のステップ、ウェーブレット係数テーブル内において局所領域内の近傍画素の平均濃度と注目画素の濃度に対応するウェーブレット係数をウェーブレット係数に関する閾値とし、注目画素のウェーブレット係数が前記閾値よりも大きな場合は注目画素をひび割れと判定し、小さな場合は注目画素をひび割れでないと判定し、局所領域および注目画素を変化させながら注目画素のウェーブレット係数と前記閾値との比較をおこない、ひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない、さらに輪郭線追跡処理をおこなうことで二値化画像を作成する第2のステップ、二値化画像におけるひび割れに対して残りのノイズを除去してひび割れ画像を作成する第3のステップ、細線化処理を実行してその中心線で構成されるひび割れの細線化画像を作成し、この細線化画像に対応するウェーブレット係数から大小2つのウェーブレット係数を抽出するとともに、2つのウェーブレット係数に対応する相対的に大きなひび割れ幅と小さなひび割れ幅を設定し、2つのウェーブレット係数、および、相対的に大きなひび割れ幅と小さなひび割れ幅で構成される第1の関係式に前記細線化画像に対応するウェーブレット係数を代入してひび割れ幅を推定する第4のステップ、からなるものである。
【0016】
ウェーブレット(wavelet)とは、小さな波という意味であり、局在性を持つ波の基本単位を、ウェーブレット関数を用いた式で表現することができる。このウェーブレット関数を拡大または縮小することにより、時間情報や空間情報と周波数情報を同時に解析することが可能となる。このウェーブレット係数を、ひび割れを有するコンクリート表面に適用する場合のこの係数の特徴としては、コンクリート表面の濃度と、ひび割れの濃度と、ひび割れ幅に依存するということである。例えば、ひび割れ幅が大きくなるにつれてウェーブレット係数の値は大きくなる傾向があり、また、ひび割れの濃度が濃くなるにつれて(黒色に近づくにつれて)ウェーブレット係数の値は大きくなる傾向がある。
【0017】
ウェーブレット変換によって算定されるウェーブレット係数を用いて、ひび割れの検出をおこなうアルゴリズムは以下のようになる。まず、コンクリート表面の撮影画像とウェーブレット関数との内積よりウェーブレット係数を求める。このウェーブレット係数を256階調に変換することで、連続量を持ったウェーブレット画像が作成できる。
【0018】
ウェーブレット係数は、上記するようにひび割れ幅やひび割れの濃度、コンクリート表面の濃度によって変化することから、擬似的に作成されたデータを用いてひび割れの濃度とコンクリート表面の濃度に関するウェーブレット係数を各階調ごとに算定しておき、ウェーブレット係数テーブルを作成しておく。このウェーブレット係数テーブルにある各階調ごとのウェーブレット係数が、ひび割れ検出の際の閾値となる。例えば、対比される2つの濃度(一方の濃度をコンクリート表面の濃度、他方の濃度をひび割れの濃度と仮定することができる)に対応するウェーブレット係数(閾値)がウェーブレット係数テーブルを参照すれば一義的に決定される。したがって、後述するように、撮影画像において対比される2つの濃度間のウェーブレット係数を算定した際に、このウェーブレット係数がウェーブレット係数テーブルの閾値よりも大きな場合は、ひび割れであると判断できるし、閾値よりも小さな場合はひび割れでないと判断することができる。
【0019】
このウェーブレット係数テーブルを作成する際の擬似的なデータは特に限定するものではないが、例えば、ひび割れ幅が1画素(1ピクセル)〜5画素(5ピクセル)までの中で、各画素幅のひび割れごとに、コンクリート表面の階調とひび割れの階調に対応するウェーブレット係数を算定する。閾値の設定に際しては、例えば、ひび割れ幅が1画素の場合のウェーブレット係数のうち、ひび割れに対応するウェーブレット係数を選定し、ひび割れ幅が5画素の場合のウェーブレット係数のうち、ひび割れ領域でない箇所のウェーブレット係数を選定し、これら2つのウェーブレット係数の平均値をもって任意の階調における閾値とすることができる。
【0020】
本発明のひび割れ検出方法においては、まず、第1のステップにおいて、上記するウェーブレット係数テーブルを作成しておくとともに、撮影画像に対してレンズ収差補正やあおり補正などの補正処理をおこない、これをコンピュータに入力して入力画像とし、この入力画像をウェーブレット変換することによってウェーブレット画像を作成する。このウェーブレット画像の作成は、コンピュータ内部において以下のように実施される。まず、適宜に設定された広域領域(例えば30×30画素の領域)に対してウェーブレット係数を算定する。次に、この広域領域から一画素移動した広域領域(同じように例えば30×30画素の領域であって、移動前の30×30画素の領域とほとんどの画素が共通している)で、同じようにウェーブレット係数を算定する。この操作を入力画像全体に繰り返すことにより、コンピュータ内部には、ウェーブレット係数の連続量からなるウェーブレット画像が作成される。
【0021】
次に第2のステップにおいて、このウェーブレット係数の連続量からなるウェーブレット画像において、ウェーブレット係数テーブル内の閾値(ウェーブレット係数)とウェーブレット画像を構成するウェーブレット係数とを比較し、画像を構成するウェーブレット係数が閾値よりも大きな場合はひび割れと判断し(画面上では例えば白色)、閾値よりも小さな場合はひび割れでないと判断する(画面上では例えば黒色)。そして、この操作をウェーブレット画像全体でおこなうことにより、黒い背景色内に白いひび割れが描き出された途中段階の二値化画像が作成される。
【0022】
この途中段階の二値化画像においてひび割れと判定された画素に対して、ひび割れとノイズの判別処理をおこなう。
【0023】
このひび割れとノイズの判別処理法の一実施の形態として、ヘッセ行列の固有値解析を適用する方法を挙げることができる。
【0024】
より具体的には、ヘッセ行列の2つの固有値λ1、λ2の関係から二次元濃淡画像の局所構造である線状構造と塊状構造それぞれの関係式を求め、そのいずれかの構造であればひび割れと判定し、いずれの構造でもない場合はノイズと判定する方法を挙げることができる。
【0025】
途中段階の二値化画像においてひび割れと判定された画素に対してひび割れとノイズの判別処理をおこなった後に、輪郭線追跡処理をおこなうことで二値化画像が作成される。
【0026】
この輪郭線追跡処理は、ひび割れとノイズの判別処理によっても依然として残っているノイズを除去するものである。輪郭線追跡処理は、ある任意の画素(ひび割れと判断されている画素)から出発して、隣接する画素がひび割れ箇所の場合には出発画素と接続し、さらに隣接する画素がひび割れ箇所の場合にはさらに双方を接続し、最終的に出発画素に閉合した場合(例えば、第1画素、第2画素、…、第n−1画素、第n画素、第1画素の順に接続される場合)や、次に繋がるひび割れ箇所が存在しなくなった場合に終了するものである。この輪郭線追跡処理によれば、ループ状に閉合するようなひび割れラインや、複数の屈曲部を備えて線状に伸びるひび割れラインなど、適宜のひび割れラインが作成されることになる。この際、繋げられる画素数の最小数を予め設定しておくことにより、この設定数以下の画素はすべてひび割れでないとして、画面のひび割れ表示から削除することができる。
【0027】
次に、第3のステップにおいて、第2のステップで作成された二値化画像に対して輪郭線追跡処理等によっても除去できない残りのノイズを除去してひび割れ画像を作成する。
【0028】
このノイズ除去は、最終的なノイズの除去となり、既述するひび割れとノイズの判別処理や輪郭線追跡処理によるノイズ除去に続くものである。ここでは、たとえば、公知の画像編集ソフトを使用して、ドット部を除去したり、所定長さ未満の線分を非クラック部としてノイズを除去する等の方法が適用できる。
【0029】
ノイズの除去が終了してひび割れ画像が作成されたら、第4のステップとして、そのひび割れ画像に対して細線化処理を実行することにより、ひび割れの中心線で構成され、たとえばひび割れ全体が1画素幅(1ピクセル幅)を有する細線化画像を作成する。本発明者等の検証によれば、任意幅のひび割れにおいて、その中心線部分が最も濃度が濃くなることが分かっており、したがって、細線化処理により、任意幅で任意長さのひび割れを構成するひび割れにおいて、各部位のひび割れ濃度を設定することができる。
【0030】
任意の細線化画像には1本もしくは複数本のひび割れが包含されているが、この細線化画像の中から、大小2つのウェーブレット係数を選定する。この2つのウェーブレット係数の選定は、任意に選定したウェーブレット係数と、このウェーブレット係数よりも相対的に小さな(または大きな)ウェーブレット係数であれば特に限定されるものではないが、最終的にひび割れを推定する上で、細線化画像中のウェーブレット係数の中で、最大値と最小値を選定するのが好ましい。この場合、最大値は、分解能のひび割れ、すなわち、撮影機器の種類(デジタル一眼レフカメラ、ハイビジョンデジタルカメラ、デジタルビデオカメラなど)、使用されるレンズの種類、撮影距離などの撮影状況によって決定される分解能のひび割れ幅に設定することができる。一方、最小値は、画像解析で検出可能なひび割れ幅に設定できる。
【0031】
次いで、上記する選定された2つのウェーブレット係数(たとえば最小値と最大値)、およびこの2つのウェーブレット係数に対応するひび割れ幅を用いて、細線化画像のウェーブレット係数を変数としたひび割れ幅の推定式を設定し、ひび割れ幅の推定をおこなう。
【0032】
最後に、推定されたひび割れ幅に基づくひび割れデータ、すなわち、全ひび割れ長さの算定やひび割れ幅ごとのひび割れ長さの算定、ひび割れ幅ごとの分布図の作成、ひび割れ展開図の作成などをおこない、該ひび割れデータから所望の情報を抽出することが可能となる。
【0033】
本発明者等の検証によれば、上記するひび割れ検出方法を適用することにより、特許文献1で示す従来の方法に比して特に低い空間分解能で撮影した画像に対して高いノイズ除去効果が得られることが実証されている。
【発明の効果】
【0034】
以上の説明から理解できるように、本発明のひび割れ検出方法によれば、注目画素のウェーブレット係数と閾値との比較をおこない、ひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない、さらに輪郭線追跡処理をおこなうことで二値化画像を作成する第2のステップを有することにより、特に低い空間分解能で撮影した画像に対して高いノイズ除去効果を得ることができ、ひび割れを高い精度で検出することが可能となる。
【図面の簡単な説明】
【0035】
【図1】入力画像と局所領域の関係を示した模式図である。
【図2】局所領域と注目画素の関係を示した模式図である。
【図3】本発明のひび割れ検出方法を示したフローである。
【図4】擬似画像を示した図である。
【図5】図4の擬似画像のウェーブレット係数の鳥瞰図である。
【図6】ウェーブレット係数テーブルの一実施の形態を示した図である。
【図7】図3のフローにおける二値化画像の作成方法の一実施の形態のフロー図である。
【図8】図3のフローにおけるひび割れ幅の推定値の算定方法の他の実施の形態のフロー図である。
【図9】本発明の検出方法の検出精度に関する検証結果を示す図であり、(a)は空間分解能0.1mm/ピクセルの撮影画像を示した写真図であり、(b)は従来方法による二値化画像を示した図であり、(c)は本発明の方法による二値化画像を示した図である。
【図10】本発明の検出方法の検出精度に関する検証結果を示す図であり、(a)は空間分解能0.2mm/ピクセルの撮影画像を示した写真図であり、(b)は従来方法による二値化画像を示した図であり、(c)は本発明の方法による二値化画像を示した図である。
【図11】本発明の検出方法の検出精度に関する検証結果を示す図であり、(a)は空間分解能0.4mm/ピクセルの撮影画像を示した写真図であり、(b)は従来方法による二値化画像を示した図であり、(c)は本発明の方法による二値化画像を示した図である。
【図12】空間分解能0.4mm/ピクセルの撮影画像に対するひび割れ画像を示した図であって、(a)は従来方法によるひび割れ画像を示した図であり、(b)は本発明の方法によるひび割れ画像を示した図である。
【図13】本発明の検出方法の検出精度に関する検証結果を示す図であり、(a)は空間分解能0.6mm/ピクセルの撮影画像を示した写真図であり、(b)は従来方法による二値化画像を示した図であり、(c)は本発明の方法による二値化画像を示した図である。
【図14】図13の撮影画像に対するひび割れ画像を示した図であって、(a)は従来方法によるひび割れ画像を示した図であり、(b)は本発明の方法によるひび割れ画像を示した図である。
【図15】本発明の検出方法の検出精度に関する検証結果を示す図であり、(a)は空間分解能0.8mm/ピクセルの撮影画像を示した写真図であり、(b)は従来方法による二値化画像を示した図であり、(c)は本発明の方法による二値化画像を示した図である。
【図16】図15の撮影画像に対するひび割れ画像を示した図であって、(a)は従来方法によるひび割れ画像を示した図であり、(b)は本発明の方法によるひび割れ画像を示した図である。
【図17】本発明の検出方法の検出精度に関する検証結果を示す図であり、(a)は空間分解能0.8mm/ピクセルで図15とは別の撮影画像を示した写真図であり、(b)は従来方法による二値化画像を示した図であり、(c)は本発明の方法による二値化画像を示した図である。
【図18】図17の撮影画像に対するひび割れ画像を示した図であって、(a)は従来方法によるひび割れ画像を示した図であり、(b)は本発明の方法によるひび割れ画像を示した図である。
【発明を実施するための形態】
【0036】
以下、図面を参照して本発明のひび割れ検出方法の実施の形態を説明する。
図1は、入力画像と局所領域の関係を示した模式図である。本発明のひび割れ検出方法では、入力画像1における広域領域2でウェーブレット変換をおこない、広域領域2の中心である局所領域3におけるひび割れの検出をおこなうものである。入力画像1内をくまなく広域領域2を上下左右に平行移動して、入力画像1内におけるひび割れの検出をおこなう。この方法により、従来の固定閾値法のように、例えば入力画像1内で一つの閾値を決める方法に比べて、精度のよいひび割れの検出をおこなうことができる。
【0037】
図2は、局所領域3を拡大した図であり、図示する実施形態では、たとえば3×3の9つの画素(8つの近傍画素31,31,…と、中央に位置する注目画素32)を対象としてひび割れ判定をおこなう。なお、ウェーブレット係数の算定は、図1における広域領域2を対象としておこなわれる。
【0038】
ここで、ウェーブレット関数(マザーウェーブレット関数)を用いたウェーブレット変換をおこなうことでウェーブレット係数を算定する算定式を以下に示す。
【0039】
【数1】
【0040】
【数2】
【0041】
【数3】
【0042】
ここで、f(x、y)は入力画像(ここで、x、yは2次元入力画像中の任意の座標である)を、Ψはマザーウェーブレット関数(ガボール関数)を、(x0、y0)はΨの平行移動量を、akはΨの拡大や縮小を(ここで、akは周波数の逆数であって、幾つかの周波数領域について計算するための周波数幅を整数kで示した値)、f0は中心周波数を、σはガウス関数の標準偏差を、θは波の進行方向を表す回転角を、(x’、y’)は(x、y)を角度θだけ回転させた座標を、それぞれ示している。
【0043】
ここで、数式1を用いて計算した複数のθ、kに対して、ウェーブレット係数Ψの累計値C(x0、y0)を求めたのが数式4となる。
【0044】
【数4】
【0045】
上記のパラメータは、任意に設定できるが、例えば、σを0.5〜2に、akは0〜5に、f0は0.1に、回転角は0〜180度に、それぞれ設定できる。
【0046】
数式4における平行移動量(x0、y0)は、注目画素の位置に対応するものであり、注目画素の位置を順次移動させることによって、ウェーブレット係数の連続量(C(x0、y0))が算定でき、この連続量を図示することによってウェーブレット画像が作成できる。
【0047】
広域領域2を構成する全画素に対して、ウェーブレット係数を上算定式に基づいて算定した後、注目画素を一つ左右または上下に移動させてできる広域領域2の全画素において同様にウェーブレット係数を算定する。このウェーブレット係数算定を入力画像全体で実施することにより、適宜の範囲内における構成画素がそれぞれのウェーブレット係数を備えたウェーブレット画像(ウェーブレット係数の連続量からなる画像)を作成することができる。
【0048】
次に、図3に基づいて、ひび割れ検出方法の一実施形態を説明する。
【0049】
CCDカメラ等のデジタルカメラで撮影されたコンクリート表面の撮影画像をコンピュータに取り込むことにより、入力画像の作成(ステップS10)がおこなわれる。
【0050】
次に、入力画像とは何らの関係もない、対比する2つの濃度からなる擬似画像に対して、ウェーブレット係数の算定をおこなう。例えば、図4に示すように、コンクリート表面と仮定される背景色a(例えば、背景色のR、G、Bが、255,255,255とする)と、ひび割れと仮定される線分b1〜b5からなる擬似画像のウェーブレット係数を求める。ここで、線分b1〜b5は、線幅が順に1画素(1ピクセル)〜5画素(5ピクセル)まで変化しており、さらに、各線分は、3種類の濃度を備えている(例えば、線分b1では、濃度の濃い順に、b11(黒色)、b12(薄い黒色)、b13(灰色)と変化している)。この擬似画像に対してウェーブレット変換をおこなうことで算定されるウェーブレット係数の鳥瞰図を示したのが図5である。図5において、X軸は線分の幅を、Y軸は線分の色の濃度を、Z軸はウェーブレット係数をそれぞれ示している。この線幅の設定は、最終的に抽出したいひび割れ幅の最大値によって設定すればよい。なお、画素幅ごとに、ひび割れ領域のウェーブレット係数と、ひび割れ領域以外のウェーブレット係数が算定できる。
【0051】
本実施形態では、コンクリート表面と仮定される任意の濃度(階調)と、ひび割れと仮定される任意の濃度(階調)に対応する閾値(ウェーブレット係数)を算定するにあたり、例えば、ひび割れ幅が1画素幅の場合におけるひび割れ領域のウェーブレット係数と、ひび割れ幅が5画素幅の場合におけるひび割れ領域以外のウェーブレット係数との平均値をもって、設定したひび割れ幅範囲内において対象となる階調に対応した閾値としている。この閾値の設定は、勿論任意でかまわない。
【0052】
対比する2つの濃度の組み合わせをそれぞれ0〜255の256階調でおこなうことで、図6に示すようなウェーブレット係数テーブルの作成(図3のステップS30)がおこなわれる。なお、この作業は、図示するフロー位置でなくともよく、例えば、入力画像の作成前であってもかまわない。
【0053】
図3に戻り、入力画像をウェーブレット変換することにより、ウェーブレット画像の作成(ステップS20)がおこなわれる。
【0054】
ウェーブレット画像は、上記するように各画素が固有のウェーブレット係数を備えた連続量からなるものであり、各画素のウェーブレット係数を対応するウェーブレット係数テーブルのウェーブレット係数(閾値)と比較することにより、黒い背景色内に白いひび割れが描き出された途中段階の二値化画像が作成される(ステップS40)。
【0055】
次に、図7で示すように、途中段階の二値化画像においてひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない(ステップS51)、次いで輪郭線追跡処理をおこなうことにより(ステップS52)、二値化画像が作成される(図3のステップS50)。
【0056】
ここで、ひび割れとノイズの判別処理の具体的な処理方法を概説する。本発明のひび割れ検出方法では、この判別処理に当たり、ヘッセ行列の2つの固有値λ1、λ2の関係から二次元濃淡画像の局所構造である線状構造と塊状構造それぞれの関係式を求め、そのいずれかの構造であればひび割れと判定し、いずれの構造でもない場合はノイズと判定する方法を適用する。
【0057】
画像の各画素(x、y)に輝度値f(x、y)を高さ方向として、(x、y)を連続変数とすれば画像は三次元曲面と解釈することができる。この曲面f(x、y)を微分することにより特徴点を求める。ここで、注目画素の注目点(x、y)のヘッセ行列は、画像の輝度値をxおよびy方向に2階微分した要素から構成される行列であり、以下の数式5で表すことができる。
【0058】
【数5】
【0059】
このヘッセ行列の固有値λ1、λ2の関係に基づいて、二次元濃淡画像の局所構造である線状構造または塊状構造の識別をおこなう。
【0060】
(線状構造の場合)
画素の線状性が高いことを意味する。ここでは、各画素の線状性の判定条件を以下の数式6で定義する。
【0061】
【数6】
【0062】
(塊状構造の場合)
画素の塊状性が高いことを意味する。ここでは、各画素の塊状性の判定条件を以下の数式7で定義する。
【0063】
【数7】
【0064】
次いで、輪郭線追跡処理の内容を概説する。この輪郭線追跡処理は、各ひび割れ領域における任意のひび割れ画素を起点とし(第1画素)、例えば、この第1画素から反時計回りに隣接する画素に注目し、この隣接画素(第2画素)がひび割れ画素である場合には第1画素と第2画素を接続する。以後、同様に第2画素、第3画素、…、第n−1画素、第n画素とひび割れ画素の追跡をおこない、第n画素の次に起点となる第1画素がくる場合には、第一画素〜第n画素までを一つのひび割れ箇所(ひび割れライン)と判定する。あるいは、第n画素の次に続くひび割れ画素が存在しなくなった時点で、第1画素〜第n画素を一つのひび割れ箇所(ひび割れライン)と判定する。なお、ひび割れラインの中には、その途中で二股以上に分岐するようなひび割れも含まれる。この次数nの設定は任意であり、第1画素からの追跡数がこの設定された次数n以上の場合をひび割れと判定することにより、ノイズの一部が除去されてなる第1のひび割れ抽出画像が作成される。
【0065】
以上の方法で二値化画像が作成されたら、この二値化画像に対して画像編集ソフトを使用して、ドット部を除去する方法、所定長さ未満の線分を非クラック部として除去するといった方法を適用してノイズの最終除去をおこなってひび割れ画像を作成する(ステップS60)。
【0066】
次に、作成されたひび割れ画像に対して、それぞれのひび割れの中心線で構成され、たとえばひび割れ全体が1画素幅(1ピクセル幅)を有する細線化画像を作成する(ステップS70)。
【0067】
この細線化画像を使用してひび割れ幅の推定値を算定する(ステップS80)。ここで、このひび割れ幅の推定方法を図8に基づいて説明する。
【0068】
ステップS70で求められた細線化画像のウェーブレット係数の最大値と最小値を求め(ステップS81)、この最大値に対応する最大ひび割れ幅と最小値に対応する最小ひび割れ幅を設定する(ステップS82)。この最大値は、分解能のひび割れ幅に、最小値は画像解析で検出可能なひび割れ幅にそれぞれ設定できる。
【0069】
次に、ひび割れ幅の推定値を算定するための推定式を設定してひび割れ幅の推定をおこなう(ステップS83)。この推定式として、たとえば下式を使用することができる。
【0070】
【数8】
【0071】
ここで、Width:ひび割れ幅の推定値、Cmax、Cmin:細線化画像のウェーブレット係数の最大値、最小値、Wmax、Wmin:ウェーブレット係数の最大値、最小値に対応するひび割れ幅、WCは細線化画像のウェーブレット係数であって、本式の変数である。
【0072】
細線化画像のウェーブレット係数を定式に代入することによって対象となるひび割れのひび割れ幅を推定(特定)する。
【0073】
図3に戻り、ステップS80によってひび割れ幅の推定をおこなった後に、各ひび割れの分布状態、ひび割れ幅ごとのひび割れ数量などに関するテーブルや図面(ひび割れ展開図など)をデータとして作成する(ステップS90)。
【0074】
[本発明の検出方法の検出精度に関する検証とその結果]
本発明者等は、空間分解能が0.1mm/ピクセル、0.2mm/ピクセル、0.4mm/ピクセル、0.6mm/ピクセル、0.8mm/ピクセルで撮影した6ケース(0.8mm/ピクセルは2画像)の画像について、特許文献1で示す従来の方法と上記で説明する本願発明の方法とでひび割れ検出解析をおこない、本願発明の方法によるノイズの低減効果について検証をおこなった。図9aは空間分解能0.1mm/ピクセルの撮影画像を示した写真図であり、図9bは従来方法による二値化画像を示した図であり、図9cは本発明の方法による二値化画像を示した図である。図10aは空間分解能0.2mm/ピクセルの撮影画像を示した写真図であり、図10bは従来方法による二値化画像を示した図であり、図10cは本発明の方法による二値化画像を示した図である。図11aは空間分解能0.4mm/ピクセルの撮影画像を示した写真図であり、図11bは従来方法による二値化画像を示した図であり、図11cは本発明の方法による二値化画像を示した図であり、図12aは従来方法によるひび割れ画像を示した図であり、図12bは本発明の方法によるひび割れ画像を示した図である。図13aは空間分解能0.6mm/ピクセルの撮影画像を示した写真図であり、図13bは従来方法による二値化画像を示した図であり、図13cは本発明の方法による二値化画像を示した図であり、図14aは従来方法によるひび割れ画像を示した図であり、図14bは本発明の方法によるひび割れ画像を示した図である。図15a、17aは空間分解能0.8mm/ピクセルの撮影画像を示した写真図であり、図15b、17bは従来方法による二値化画像を示した図であり、図15c、17cは本発明の方法による二値化画像を示した図であり、図16a、18aは従来方法によるひび割れ画像を示した図であり、図16b、18bは本発明の方法によるひび割れ画像を示した図である。また、以下、表1にノイズ除去低減率の比較表を示す。
【0075】
【表1】
【0076】
表1において、ピクセルの値は、二値化画像でひび割れと判定されたピクセル数の総和を表している。また、ノイズ低減率は従来の方法のピクセル数に対して、本発明の方法のノイズ軽減率で割った比率を表している。
【0077】
図9〜図18および表1より、高い空間分解能である0.1〜0.2mm/ピクセルではノイズ除去効果が確認できない。
【0078】
空間分解能が0.4mm/ピクセル、0.6mm/ピクセルになるとそれぞれ、20%程度、30%程度のノイズ除去効果が確認でき、ともに同一のひび割れ検出結果が得られている。
【0079】
空間分解能が0.8mm/ピクセルでは、35%程度のノイズ除去効果が確認でき、同一のひび割れ検出結果が得られている。
【0080】
以上の結果より、特に低い空間分解能の撮影画像に対して、本発明のひび割れ検出方法は高いノイズ除去効果を発揮することが実証されている。
【0081】
以上、本発明の実施の形態を、図面を用いて詳述してきたが、具体的な構成はこの実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲における設計変更等があっても、それらは本発明に含まれるものである。
【符号の説明】
【0082】
1…入力画像、2…広域領域、3…局所領域、31…近傍画素、32…注目画素
【特許請求の範囲】
【請求項1】
コンクリート表面に生じているひび割れの検出をおこなうひび割れ検出方法であって、
対比される2つの濃度に対応したウェーブレット係数を算定するとともに、この2つの濃度をそれぞれ変化させた場合のウェーブレット係数を算定してウェーブレット係数テーブルを作成し、ひび割れ検出対象であるコンクリート表面の撮影画像をコンピュータに入力して入力画像とし、この入力画像をウェーブレット変換することによってウェーブレット画像を作成する第1のステップ、
ウェーブレット係数テーブル内において局所領域内の近傍画素の平均濃度と注目画素の濃度に対応するウェーブレット係数をウェーブレット係数に関する閾値とし、注目画素のウェーブレット係数が前記閾値よりも大きな場合は注目画素をひび割れと判定し、小さな場合は注目画素をひび割れでないと判定し、局所領域および注目画素を変化させながら注目画素のウェーブレット係数と前記閾値との比較をおこない、ひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない、さらに輪郭線追跡処理をおこなうことで二値化画像を作成する第2のステップ、
二値化画像におけるひび割れに対して残りのノイズを除去してひび割れ画像を作成する第3のステップ、
細線化処理を実行してその中心線で構成されるひび割れの細線化画像を作成し、この細線化画像に対応するウェーブレット係数から大小2つのウェーブレット係数を抽出するとともに、2つのウェーブレット係数に対応する相対的に大きなひび割れ幅と小さなひび割れ幅を設定し、2つのウェーブレット係数、および、相対的に大きなひび割れ幅と小さなひび割れ幅で構成される第1の関係式に前記細線化画像に対応するウェーブレット係数を代入してひび割れ幅を推定する第4のステップ、からなるひび割れ検出方法。
【請求項2】
前記第2のステップにおいて、ひび割れとノイズの判別処理は、その前段階におけるウェーブレット係数と閾値との比較をおこなってひび割れと判定されたすべての画素に対し、ヘッセ行列の固有値解析を適用してひび割れとノイズの判別処理をおこなうものである請求項1に記載のひび割れ検出方法。
【請求項3】
前記ヘッセ行列の2つの固有値の関係から二次元濃淡画像の局所構造である線状構造と塊状構造それぞれの関係式を求め、そのいずれかの構造であればひび割れと判定し、いずれの構造でもない場合はノイズと判定する請求項2に記載のひび割れ検出方法。
【請求項4】
前記第4のステップにおける前記大小2つのウェーブレット係数は、細線化画像に対応するウェーブレット係数中の最大値と最小値であり、
前記2つのウェーブレット係数に対応する相対的に大きなひび割れ幅はウェーブレット係数の最大値に対応する最大ひび割れ幅であり、相対的に小さなひび割れ幅はウェーブレット係数の最小値に対応する最小ひび割れ幅である、請求項1〜3のいずれかに記載のひび割れ検出方法。
【請求項1】
コンクリート表面に生じているひび割れの検出をおこなうひび割れ検出方法であって、
対比される2つの濃度に対応したウェーブレット係数を算定するとともに、この2つの濃度をそれぞれ変化させた場合のウェーブレット係数を算定してウェーブレット係数テーブルを作成し、ひび割れ検出対象であるコンクリート表面の撮影画像をコンピュータに入力して入力画像とし、この入力画像をウェーブレット変換することによってウェーブレット画像を作成する第1のステップ、
ウェーブレット係数テーブル内において局所領域内の近傍画素の平均濃度と注目画素の濃度に対応するウェーブレット係数をウェーブレット係数に関する閾値とし、注目画素のウェーブレット係数が前記閾値よりも大きな場合は注目画素をひび割れと判定し、小さな場合は注目画素をひび割れでないと判定し、局所領域および注目画素を変化させながら注目画素のウェーブレット係数と前記閾値との比較をおこない、ひび割れと判定された画素に対してひび割れとノイズの判別処理をおこない、さらに輪郭線追跡処理をおこなうことで二値化画像を作成する第2のステップ、
二値化画像におけるひび割れに対して残りのノイズを除去してひび割れ画像を作成する第3のステップ、
細線化処理を実行してその中心線で構成されるひび割れの細線化画像を作成し、この細線化画像に対応するウェーブレット係数から大小2つのウェーブレット係数を抽出するとともに、2つのウェーブレット係数に対応する相対的に大きなひび割れ幅と小さなひび割れ幅を設定し、2つのウェーブレット係数、および、相対的に大きなひび割れ幅と小さなひび割れ幅で構成される第1の関係式に前記細線化画像に対応するウェーブレット係数を代入してひび割れ幅を推定する第4のステップ、からなるひび割れ検出方法。
【請求項2】
前記第2のステップにおいて、ひび割れとノイズの判別処理は、その前段階におけるウェーブレット係数と閾値との比較をおこなってひび割れと判定されたすべての画素に対し、ヘッセ行列の固有値解析を適用してひび割れとノイズの判別処理をおこなうものである請求項1に記載のひび割れ検出方法。
【請求項3】
前記ヘッセ行列の2つの固有値の関係から二次元濃淡画像の局所構造である線状構造と塊状構造それぞれの関係式を求め、そのいずれかの構造であればひび割れと判定し、いずれの構造でもない場合はノイズと判定する請求項2に記載のひび割れ検出方法。
【請求項4】
前記第4のステップにおける前記大小2つのウェーブレット係数は、細線化画像に対応するウェーブレット係数中の最大値と最小値であり、
前記2つのウェーブレット係数に対応する相対的に大きなひび割れ幅はウェーブレット係数の最大値に対応する最大ひび割れ幅であり、相対的に小さなひび割れ幅はウェーブレット係数の最小値に対応する最小ひび割れ幅である、請求項1〜3のいずれかに記載のひび割れ検出方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−2839(P2013−2839A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−131317(P2011−131317)
【出願日】平成23年6月13日(2011.6.13)
【出願人】(000206211)大成建設株式会社 (1,602)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月13日(2011.6.13)
【出願人】(000206211)大成建設株式会社 (1,602)
【Fターム(参考)】
[ Back to top ]