
るつぼ空焼き装置
【課題】寸法精度の低い安価なるつぼを用いても確実に動作し、しかも構造が簡単でコストダウンも促進できるるつぼ空焼き装置100を提供する。
【解決手段】水平に寝かせた複数のるつぼUを、隣り合うものの底部と開口部とが接するように一列に並べて保持する保持レール部31と、るつぼUを加熱する加熱炉10内に設けたるつぼUの水平移動路2とを直列させ、保持レール部31にあるるつぼUをその列方向に水平に押し込むことによって、順次加熱炉10内に送り込むように構成した。
【解決手段】水平に寝かせた複数のるつぼUを、隣り合うものの底部と開口部とが接するように一列に並べて保持する保持レール部31と、るつぼUを加熱する加熱炉10内に設けたるつぼUの水平移動路2とを直列させ、保持レール部31にあるるつぼUをその列方向に水平に押し込むことによって、順次加熱炉10内に送り込むように構成した。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、加熱することによって金属等の試料中に含まれる炭素や硫黄等の元素を分析する元素分析装置に用いられるるつぼを空焼きする装置に関するものである。
【背景技術】
【0002】
この種の元素分析装置では、例えばセラミック製のるつぼ内に試料を入れて燃焼させ、その際に試料中の炭素や硫黄が酸化して発生するCO、CO2、SO2などのガスを定量することによって、該試料内の炭素や酸素の量を測定する。
【0003】
このとき、るつぼに不純物が含まれていたりダストが付着していると、そこからガスが発生して測定誤差の原因となるため、測定前にはるつぼを予め空焼きする。
【0004】
しかして、従来のるつぼ空焼き装置は、特許文献1、2に示すように、るつぼストッカーにるつぼを横向きかつ縦積みにストックし、最も下のるつぼをシリンダで水平に押し出して空焼き用の加熱炉に順次送り込んでいく構造となっている。なお、このシリンダは、加熱炉にるつぼを送り込むだけでなく、同時に送り込んだるつぼによって加熱炉内の空焼きの終わったるつぼを押し出す機能も果たしている。
【0005】
しかしながら、このような構成では、最も下のるつぼを押し出す際に、その上方のるつぼが落下しないようにすべく、前記シリンダの他に、このシリンダの動作に連動するような落下防止ストッパが必要になるなど、多くのアクチュエータを用いた複雑に絡み合うような構造となり、故障がちでコストダウンが難しいという問題がある。
【0006】
また、寸法精度が低く、特に高さ方向の寸法(軸方向寸法)にばらつきがあるるつぼを使用すると、ストッカー内でるつぼが詰まったり、斜めになったり、あるいはそもそもストッカーにるつぼが入らなかったりする。したがって、従来のものでは、寸法精度が高く、高価なるつぼを用いざるを得ず、比較的安価なるつぼを使用するとことが難しい。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開昭61−129568号公報
【特許文献2】実開平3−114058号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、上述した問題を鑑みてなされたものであり、その主たる所期課題は、構造が簡単でコストダウンを促進でき、寸法精度の低い安価なるつぼを用いても確実に動作するるつぼ空焼き装置を提供することにある。
【課題を解決するための手段】
【0009】
すなわち、本発明に係るるつぼ空焼き装置は、一端をるつぼの挿入口、他端をるつぼの導出口に接続された水平移動路を内部に有し、前記挿入口から挿入されたるつぼが、次に挿入された後ろのるつぼに押されることによって前記導出口に向かって移動するように構成されたるつぼ空焼き用の加熱炉を具備したものである。
【0010】
そして、水平に寝かせた複数のるつぼを、隣り合うものの底部と開口部とが接するように一列に並べて保持する保持レール部と、前記保持レール部で保持されている最後端のるつぼを押圧して一列のるつぼ全部を当該列方向に移動させ、保持レール部の先端に設けた送出口からるつぼを順次送出するスライドアクチュエータとをさらに具備し、前記保持レール部の送出口と前記水平移動路の挿入口とが接続されて、該保持レール部及び水平移動路が直列するように構成してあることを特徴とする。
【0011】
このようなものであれば、保持レール部のるつぼと加熱炉内のるつぼとが水平一直線上に直列するので、保持レール部上の最後端のるつぼを押すスライドアクチュエータを設けるだけの簡単な構造で、加熱炉にるつぼを送り込むとともにその導出口からるつぼを1つ1つ押し出すことができる。また、このように簡単な構造であるからこそ、故障が少なく、動作の確実性を担保できる。さらに、水平移動路や保持レール部の径に余裕を持たせることで、外径や高さ方向寸法に多少ばらつきのある安価なるつぼを用いても、問題なく動作させることもできる。
【0012】
前記列方向に延長することなく、その方向のコンパクト性を維持したまま、多くのるつぼを保持できるようにするためには、互いに平行な複数の前記保持レール部を支持するるつぼストッカーと、該るつぼストッカーを移動させて各保持レール部の送出口を前記挿入口との接続位置に位置づける移動機構とをさらに具備するものが好ましい。
【0013】
前記加熱炉の導出口から導出されたるつぼを受け止めるるつぼ受け止め部をさらに具備したものにおいて、空焼きしたるつぼを加熱炉からひとつひとつ確実に導出するとともに、るつぼ受け止め部に重複してるつぼが溜まらないようにするには、前記導出口からるつぼが導出された時点及びその導出されたるつぼが前記るつぼ受け止め部にあるか否かを検出するるつぼ検出機構をさらに具備するものが好適である。
【0014】
前記列方向のコンパクト性を向上させるには、前記スライドアクチュエータが、前記保持レール部の側方、下方又は上方に平行に設けた案内部と、該案内部に案内されてスライド移動する付勢体とを具備したものであり、前記付勢体に、保持レール部の側方、下方又は上方に設けた隙間から該保持レール部内に挿入されて前記最後端のるつぼを押すアームを設けた構成が好適である。このようなものであれば、スライドアクチュエータを保持レール部とほぼ同じ長さにして、しかも保持レール部に並列させて配置できるからである。
【0015】
るつぼとの接触抵抗を減らして円滑な移動を可能にするとともに、移動時に擦れることで発生する削粉等が蓄積されることを防止するには、保持レール部が、るつぼの外径よりも離間距離を短く設定した一対の平行な棒状部材からなり、るつぼが前記一対の棒状部材間にその一部を嵌入させて保持されるように構成してあるものが望ましい。
【発明の効果】
【0016】
本発明によれば、保持レール部と加熱炉内の水平移動路とを一直線となるように配置するとともに、保持レール部上の最後端のるつぼを押すスライドアクチュエータを設けるだけの簡単な構造で、加熱炉にるつぼを送り込んで導出口から押し出すという機能を実現できる。したがって、故障が少なく、動作の確実性を担保できるとともに、コストダウンにも寄与し得る。
【0017】
さらに、水平移動路や保持レール部の径に余裕を持たせることで、外径や高さ方向寸法に多少ばらつきのある安価なるつぼを用いても、問題なく動作させることができる。
【図面の簡単な説明】
【0018】
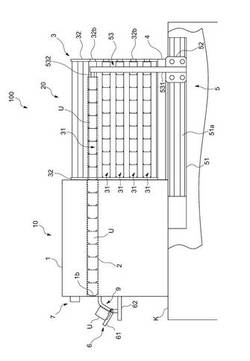
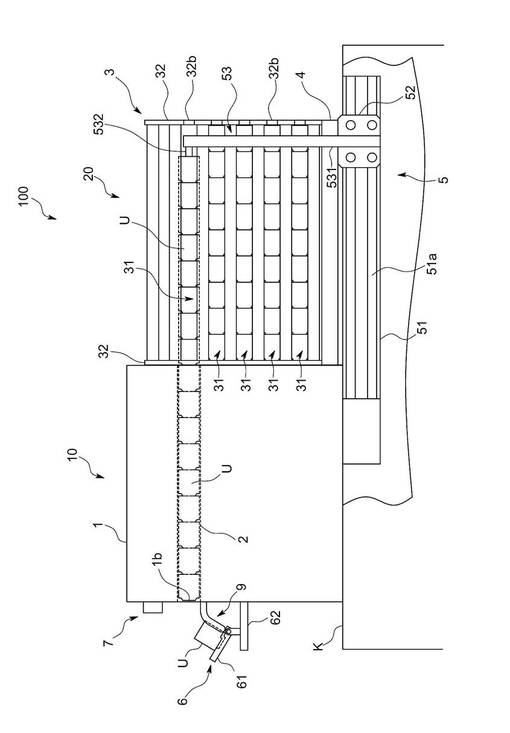
【図1】本発明の一実施形態に係るるつぼ空焼き装置の全体を示す概略側面図。
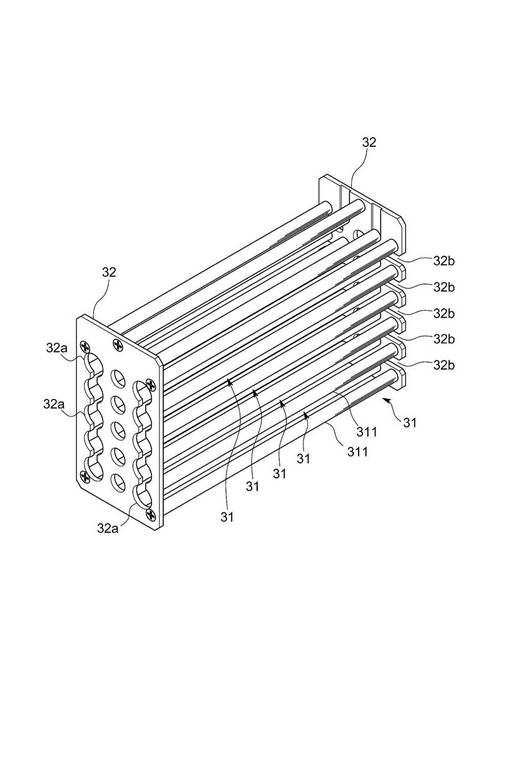
【図2】同実施形態におけるるつぼストッカーを示す斜視図。
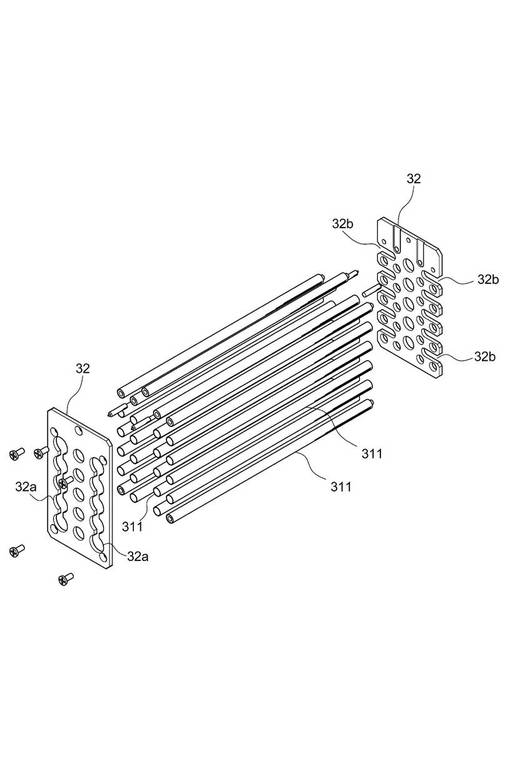
【図3】同実施形態におけるるつぼストッカーを示す分解斜視図。
【図4】同実施形態における保持レール部及びるつぼを示す部分斜視図。
【図5】同実施形態におけるスライドアクチュエータを示す斜視図。
【図6】同実施形態における導出口やるつぼ受け止め部等を示す部分斜視図。
【図7】同実施形態のるつぼ空焼き装置の動作を示す概略側面図。
【図8】同実施形態のるつぼ空焼き装置の動作を示す概略側面図。
【図9】同実施形態のるつぼ空焼き装置の動作を示す概略側面図。
【図10】同実施形態のるつぼ空焼き装置の動作を示す概略側面図。
【発明を実施するための形態】
【0019】
以下、本発明の一実施形態について図面を参照して説明する。
【0020】
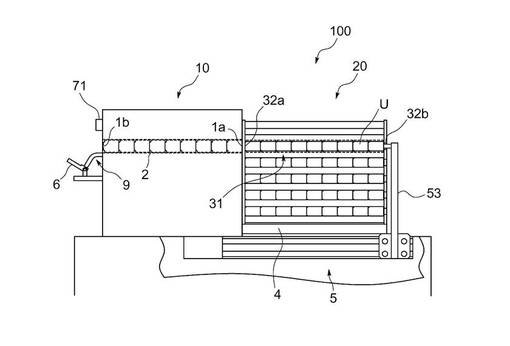
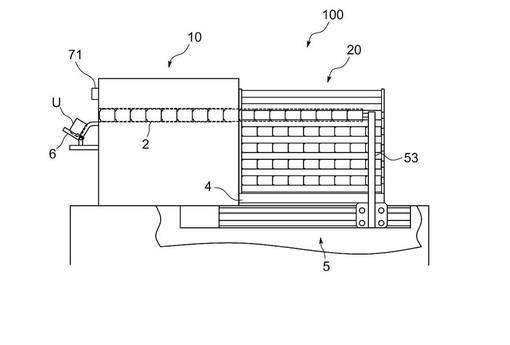
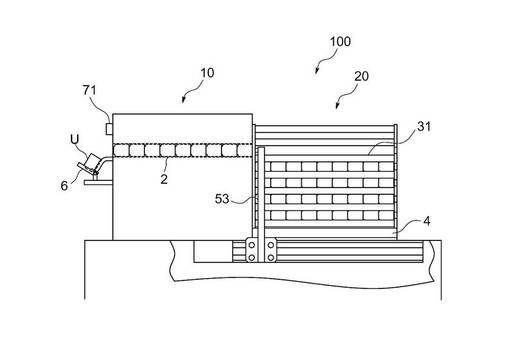
本実施形態に係るるつぼ空焼き装置100は、試料を燃焼させ、その燃焼ガスによって当該試料内に含まれる元素を分析する元素分析装置(図示しない)に用いられるるつぼUを空焼きするためのものであって、図1に示すように、るつぼUを加熱して空焼きする加熱炉10と、その加熱炉10にるつぼUを送り込むためのるつぼ送出機構20とを具備している。
このるつぼ送出機構20が、本るつぼ空焼き装置100の主たる特徴部分であるが、まずは加熱炉10について簡単に説明する。
【0021】
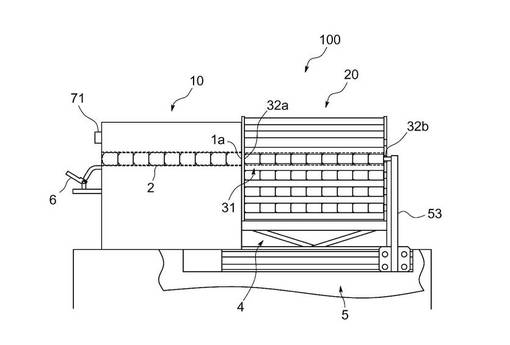
この加熱炉10は、図1に示すように、架台Kに配設されたものであり、例えば直方体状をなし、後面にるつぼUの挿入口1aが開口するとともに前面にるつぼUの導出口1bが開口するボディ1と、ボディ1内に配設されて前記挿入口1aに一端が接続されるとともに導出口1bに他端が接続された直線管状のるつぼ用水平移動路2と、前記水平移動路2の周囲に設けた図示しないヒータとを具備する。そして、前記挿入口1aからるつぼUが挿入されると、そのるつぼUによって水平移動路2に充填されている前のるつぼUが次々押されて移動し、前記導出口1bからるつぼUが順に押し出されるように構成してある。なお、ここでは、この水平移動路2を左右(ここでは、図1の紙面奥行き方向のことである。)に2つ設けている。
【0022】
一方、前記るつぼ送出機構20は、図1に示すように、前記架台Kに配設されたものであり、前記加熱炉10の後面に隣接して配置されるるつぼストッカー3と、このるつぼストッカー3を上下に駆動する移動機構4と、前記るつぼストッカー3の下方に配置されるスライドアクチュエータ5と、加熱炉10から導出されたるつぼUを検出するるつぼ検出機構7と、前記スライドアクチュエータ5や移動機構4等を制御する制御機構(図示しない)とを具備する。
各部を詳述する。
【0023】
るつぼストッカー3は、図1から図3に示すように、水平に延伸する複数の互いに平行な保持レール部31と、これら保持レール部31の両端に配設されて該保持レール部31を支持する一対の保持板32とを具備したものであり、前記保持レール部31に、複数のるつぼUが、水平に寝た状態で、かつ、隣り合うものの底部と開口部とが接するように一列に並べて保持される。なお、この実施形態では、この保持レール部31を、上下に5列、また、水平移動路2が左右に2つあることに対応して左右に2列の合計10列設けている。
【0024】
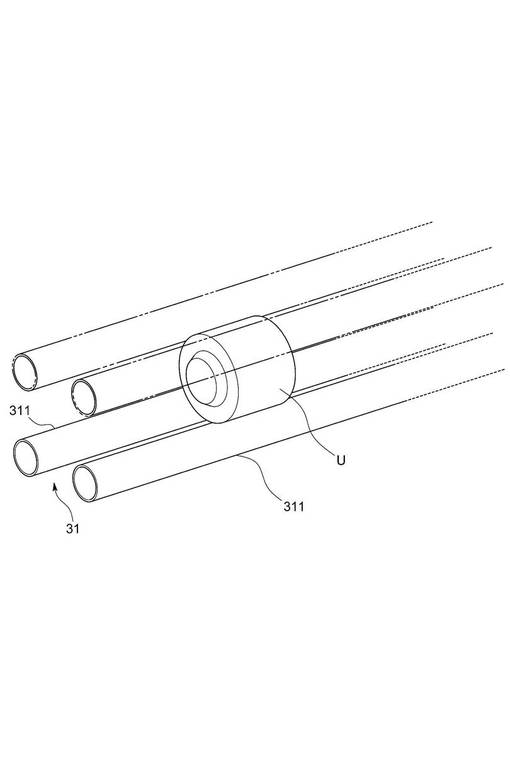
保持レール部31は、特に図4に詳細に示すように、互いの離間距離がるつぼUの外径よりも短く設定された一対の平行な円柱状又は円筒状をなす直線棒状部材311からなるものであり、るつぼUは、これら一対の棒状部材311間にその一部を嵌入させて保持される。
【0025】
保持板32は、保持レール部31の延伸方向(るつぼUの列方向)と垂直に起立する板状をなすものであり、前側のものには、るつぼUが通過する大きさの送出口32aが設けてあり、後側のものには、後述するスライドアクチュエータ5のアーム53が通過するための側方に開口する切り込み孔32bが設けてある。
【0026】
移動機構4は、図1に示すように、例えばるつぼストッカー3を支持するZステージを利用したものである。そして、このるつぼストッカー3を保持レール部31の上下ピッチに合わせて段階的に上下動させることで、上下いずれかの段の保持レール部31の送出口32aが、前記挿入口1aとの接続位置に選択的に位置づけられるようにしてある。
【0027】
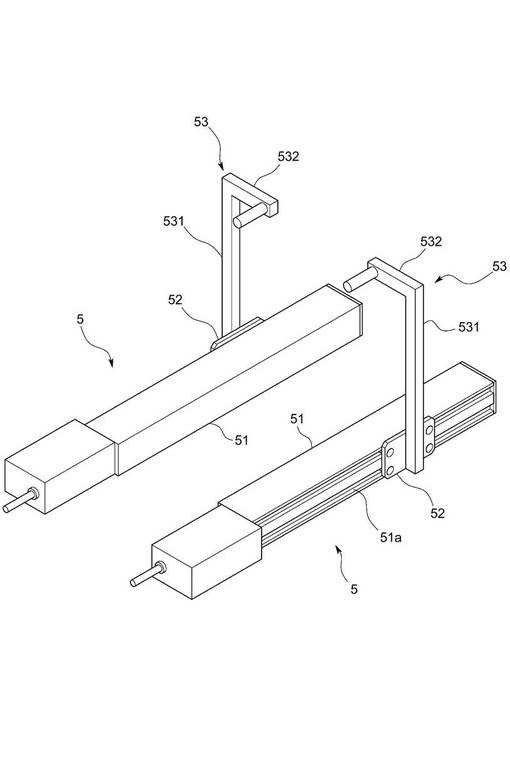
スライドアクチュエータ5は、図1、図5等に示すように、前記保持レール部31で保持されている一列のるつぼUを、後ろから押して当該列方向に移動させ、前記送出口32aからるつぼUを順次送出するものである。より具体的にこのものは、案内部たる溝51aを有したケーシング51と、この溝51aに嵌合して保持レール部31の延伸方向(すなわち、るつぼUの列方向)にスライド移動する付勢体52と、この付勢体52を進退駆動する図示しない駆動機構とを具備している。なお、このスライドアクチュエータ5は、水平移動路2が左右に2つあることに対応して左右に2つが設けられている。
【0028】
ケーシング51は、長尺直方体状をなすものであり、るつぼストッカー3の下方に、その延伸方向を、保持レール部31の延伸方向と合致させて配置してある。そしてその側面に前記溝51aが形成してある。
【0029】
付勢体52は、前記溝51aに嵌合する板状をなすもので、この付勢体52からるつぼストッカー3に向かって上方に延出するアーム53を設けている。アーム53は、付勢体52に接続された鉛直に起立する基端部531と、前記基端部531の先端から保持レール部31に向かって水平に延出する先端部532とからなる概略逆L字型をなすものである。そして前記先端部532が、側方から保持レール部31内に差し込んであり、当該保持レール部31に保持されている最後尾のるつぼUをその後ろから前方に向かって押すことができるように構成してある。
【0030】
前記駆動機構は、図示しないが、ケーシング51内に配設したモータ及びこのモータの回転軸に連結されたネジ部材とからなるものであり、このネジ部材に前記付勢体52に設けた雌ねじ孔が螺合するように構成してある。そして前記モータが正逆回転することによって、付勢体52が進退移動するように構成してある。
【0031】
さらにこの実施形態では、図1、図6等に示すように、前記加熱炉10の導出口1bから導出されたるつぼUを受け止めるるつぼ受け止め部6と、前記導出口1bから導出されたるつぼUを前記るつぼ受け止め部6に導く接続路9とをさらに設けている。
【0032】
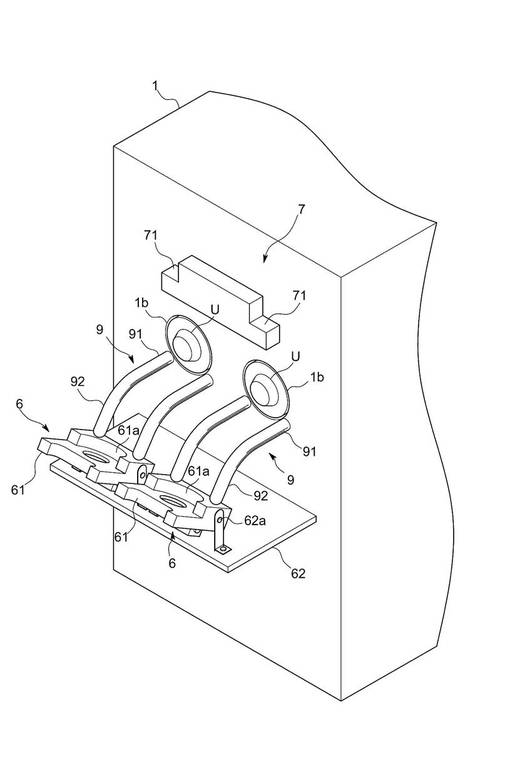
まず接続路9から説明すると、このものは、前記導出口1bから水平前方に延出する基端部分91と、その基端部分91に連続して前方斜め下方に垂れ下がる先端部分92とから構成されるもので、この実施形態では、保持レール部31同様、一対の平行な管(円筒棒)又は円柱棒によって形成している。しかして、前記基端部分91の長さは、るつぼUの高さ(軸方向の長さ)の半分未満に設定してあり、導出口1bから押し出されたるつぼUは、自重で先端部分92を滑り落ちていくように構成してある。
【0033】
るつぼ受け止め部6は、前記接続路9の先端に臨むように配置される板体61と、この板体61を左右水平軸周りに回転可能に支持するブラケット62と、前記板体61を、接続路9の先端に接するように弾性付勢する弾性体(図示しない)とを具備したものである。板体61は、その表面にるつぼUの底部が嵌り込む部分円形凹部61aを形成した矩形状をなす簿板である。ブラケット62は、加熱炉ボディ1の前面に取り付けられたもので、このブラケット62に、列方向と垂直でかつ水平な方向に延びる回転軸62aが設けられている。板体61は、その基端部を前記回転軸62aによって回転可能に支持されている。弾性体は、図示しないが、例えば、回転軸62aやブラケット62に取り付けられたバネであり、その弾性力によって、板体61を、その先端部が上方に回転するように付勢する。そして、外力が加わらない状態では、板体61は接続路9の先端に押圧接触し、その表面が接続路先端部分92の延伸方向と略垂直になる姿勢で保持される。なお、板体61の回転範囲は、接続路9の先端に押圧接触している斜めの姿勢から、その先端部分92が下がって水平姿勢となる範囲に規制されている。
【0034】
るつぼ検出機構7は、各導出口1bの近傍(ここでは上方)に取り付けられた例えば超音波センサ等の物体感知センサ71を具備したものである。この物体感知センサ71は、その感知範囲が、前記接続路9の先端部分92及びるつぼ受け止め部6に及んでおり、るつぼUが、接続路9を通過したりるつぼ受け止め部6にあったりすると、そのるつぼUの存在を感知してその旨の信号を出力する。
【0035】
制御機構は、図示しないが、例えばCPUやメモリ等を有した電気回路で構成されたものであり、前記物体感知センサ71等からの信号を受信して移動機構4やスライドアクチュエータ5の動作を制御する。
次に、かかる構成のるつぼ空焼き装置100の動作について説明する。
【0036】
まず、オペレータが、るつぼストッカー3の各保持レール部31にるつぼUを充填する。なお、このるつぼストッカー3は、移動機構4から取り外し可能に構成してあるので、オペレータは、るつぼストッカー3を取り外した状態で、その前面の送出口32aにるつぼUを開口側から挿入すればよい。このようにしてるつぼストッカー3の各保持レール部31にるつぼUを充填した後、るつぼストッカー3を移動機構4に取り付ける。
この状態で、例えばオペレータが図示しないスタートボタンを押すと、加熱炉10が点火されるとともに前記制御機構による自動運転が始まる。
【0037】
まず最初に、制御機構の指令によって移動機構4が作動し、例えば最上列の保持レール部31の送出口32aが加熱炉10の挿入口1aと略連続するように、るつぼストッカー3を移動させる。
【0038】
次に、一方のスライドアクチュエータ5が作動し、そのアーム53を最上列の保持レール部31の後方から切り込み孔32bを介して挿入し、当該保持レール部31の最後端に位置するるつぼUの後ろに位置づける。この状態を図7に示す。
【0039】
そして、物体感知センサ71によって、この保持レール部31に対応する一方のるつぼ受け止め部6にるつぼUがあるかないかが検出される。その結果、るつぼUがなければ、制御機構の指令によって、アーム53が前方にスライド移動し、その列のるつぼUを前方に移動させる。
【0040】
このとき、加熱炉10の水平移動路2内には、前回の残りのるつぼUが充填されているので、そのるつぼUも押されて前方に移動し、最前端のるつぼUが加熱炉10の導出口1bから押し出される。押し出されたるつぼUは、前記接続路9を通り、るつぼ受け止め部6で受け止められる。
【0041】
しかして、前記るつぼUが接続路9を通過したときに物体感知センサ71がその旨を出力するので、それを制御機構が受信して、その時点でアーム53を停止させる。このようにして、結果的にアーム53がるつぼU1つ分だけ前方に移動して、1つのるつぼUがるつぼ受け止め部6に受け止められる。この状態を図8に示す。なお、初期状態で水平移動路2内にるつぼUがなく、あるいは完全に充填されていない場合は、るつぼUが1つだけ押し出されるまでアーム53は前方に移動し続ける。
次に、るつぼUを押し出す所定の時間間隔が経過するのを待って、制御機構は、他方のスライドアクチュエータ5を作動させ、前記同様の動作を行う。
【0042】
ところで、るつぼ受け止め部6にあるるつぼUは、図示しないロボットやオペレータにより取り去られる。ロボットの場合は、そのハンドが前記板体61を弾性付勢力に逆らって水平にし、るつぼUを鉛直に起立させた状態で、当該るつぼUを掴むように設定してある。
【0043】
るつぼUが取り去られると、物体感知センサ71がその旨を検知するので、前述の手順同様、制御機構が、今度は一方のアーム53を前方に移動させて、次のるつぼUを1つ押し出す。なお、このときも、るつぼUを押し出すタイミングが、前のるつぼUを押し出した時間から、前述した所定の時間間隔以上空くように、制御機構は制御する。これは加熱炉10内に各るつぼUを一定時間以上滞在させて、十分に空焼きするためである。
【0044】
このようにして、左右のアーム53が交互に動作し、最上段2列の保持レール部31のるつぼUを全て加熱炉10内に送出すると、図示しないリミットセンサなどによってそのことを制御機構が検知する。このときの状態を図9に示す。その後、制御機構は、各アーム53を後方に移動させて、保持レール部31から離脱させる。
【0045】
次に制御機構は、移動機構4を動作させてるつぼストッカー3を上昇させ、次段の保持レール部31の送出口32aを加熱炉10の挿入口1aに位置づける。このときの状態を図10に示す。そしてその保持レール部31のるつぼUがなくなるまで、前述の動作を繰り返す。
以上が、このるつぼ空焼き装置100の動作の概略である。
【0046】
しかしてこのように構成した本実施形態によれば、保持レール部31のるつぼUと加熱炉10内のるつぼUとが水平一直線上に直列するように構成し、かつ、保持レール部31上の最後端のるつぼUを押すスライドアクチュエータ5を設けるだけの簡単な構造で、加熱炉10にるつぼUを送り込むとともにその導出口1bからるつぼUを押し出すことができる。また、加熱炉10の導出口1bからるつぼUが導出された時点及びその導出されたるつぼUが前記るつぼ受け止め部6にあるか否かを検出するるつぼ検出機構7を設け、このるつぼ検出機構7からの出力信号に基づいてスライドアクチュエータ5を動作させているので、るつぼUの高さ方向の寸法がバラバラでも、空焼きしたるつぼUを加熱炉10からひとつひとつ確実に導出することができるうえ、るつぼ受け止め部6に重複してるつぼUが溜まらないようにすることができる。
【0047】
さらに、仮に、るつぼUを移動させるためにシリンダを利用した場合、シリンダの仕様として、るつぼUの移動長分のピストン及びそのピストンを収容する長さのボアが必要となるため、装置全体として列方向に長くならざるを得ない。しかし、この実施形態によれば、前述したように、ネジ部材に螺合してそのネジ部材の回転によって進退移動する付勢体52を有したスライドアクチュエータ5を利用しているので、スライドアクチュエータ5を保持レール部31とほぼ同じ長さにでき、しかもこのスライドアクチュエータ5を保持レール部31に並列させて配置できる。したがって、前記列方向のコンパクト性を向上させることができる。
【0048】
また、保持レール部31及び接続路9が、るつぼUの外径よりも離間距離を短く設定した一対の平行な棒状部材311からなるので、るつぼUとの接触抵抗が減少して円滑な移動が可能になるとともに、移動時に擦れることで発生する削粉等を下に落としてこれが蓄積されることを防止することができる。
【0049】
加えて、この実施形態では2列の水平移動路2を設け、そこから交互にるつぼUが押し出されるようにしているので、同じ時間間隔でるつぼUを押し出す1列のものに比べ、加熱炉10内でのるつぼUの滞在時間を長くできる。逆に言えば、同じ滞在時間を確保する場合、1列のものに比べて加熱炉10の列方向の長さを短くできる。さらに、1列が故障等の理由により動作しない場合、残りの1列のみで送り出しが可能である。
【0050】
なお、本発明は前記実施形態に限られるものではない。
例えば、前記実施形態では、2列の水平移動路とそれに対応するように水平には2列の保持レール及び2つのスライドアクチュエータ5を設けていたが、これを1列にしてもよいし3列以上にしてもよい。また、2列のるつぼUを交互に押し出すようにしていたが、これを同時に押し出すようにしてもよい。
保持レール部の形状は、レール機能(案内機能)を果たしさえすればよく、例えば管状のもの等も保持レール部として用いることができる。
その他、本発明は、その趣旨を逸脱しない範囲で種々の変形が可能である。
【符号の説明】
【0051】
100…るつぼ空焼き装置
10…加熱炉
U…るつぼ
1a…挿入口
1b…導出口
2…水平移動路
3…るつぼストッカー
31…保持レール部
32a…送出口
5…スライドアクチュエータ
4…移動機構
6…るつぼ受け止め部
5…るつぼ検出機構
51a…案内部(溝)
52…付勢体
53…アーム
311…棒状部材
【技術分野】
【0001】
本発明は、加熱することによって金属等の試料中に含まれる炭素や硫黄等の元素を分析する元素分析装置に用いられるるつぼを空焼きする装置に関するものである。
【背景技術】
【0002】
この種の元素分析装置では、例えばセラミック製のるつぼ内に試料を入れて燃焼させ、その際に試料中の炭素や硫黄が酸化して発生するCO、CO2、SO2などのガスを定量することによって、該試料内の炭素や酸素の量を測定する。
【0003】
このとき、るつぼに不純物が含まれていたりダストが付着していると、そこからガスが発生して測定誤差の原因となるため、測定前にはるつぼを予め空焼きする。
【0004】
しかして、従来のるつぼ空焼き装置は、特許文献1、2に示すように、るつぼストッカーにるつぼを横向きかつ縦積みにストックし、最も下のるつぼをシリンダで水平に押し出して空焼き用の加熱炉に順次送り込んでいく構造となっている。なお、このシリンダは、加熱炉にるつぼを送り込むだけでなく、同時に送り込んだるつぼによって加熱炉内の空焼きの終わったるつぼを押し出す機能も果たしている。
【0005】
しかしながら、このような構成では、最も下のるつぼを押し出す際に、その上方のるつぼが落下しないようにすべく、前記シリンダの他に、このシリンダの動作に連動するような落下防止ストッパが必要になるなど、多くのアクチュエータを用いた複雑に絡み合うような構造となり、故障がちでコストダウンが難しいという問題がある。
【0006】
また、寸法精度が低く、特に高さ方向の寸法(軸方向寸法)にばらつきがあるるつぼを使用すると、ストッカー内でるつぼが詰まったり、斜めになったり、あるいはそもそもストッカーにるつぼが入らなかったりする。したがって、従来のものでは、寸法精度が高く、高価なるつぼを用いざるを得ず、比較的安価なるつぼを使用するとことが難しい。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開昭61−129568号公報
【特許文献2】実開平3−114058号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、上述した問題を鑑みてなされたものであり、その主たる所期課題は、構造が簡単でコストダウンを促進でき、寸法精度の低い安価なるつぼを用いても確実に動作するるつぼ空焼き装置を提供することにある。
【課題を解決するための手段】
【0009】
すなわち、本発明に係るるつぼ空焼き装置は、一端をるつぼの挿入口、他端をるつぼの導出口に接続された水平移動路を内部に有し、前記挿入口から挿入されたるつぼが、次に挿入された後ろのるつぼに押されることによって前記導出口に向かって移動するように構成されたるつぼ空焼き用の加熱炉を具備したものである。
【0010】
そして、水平に寝かせた複数のるつぼを、隣り合うものの底部と開口部とが接するように一列に並べて保持する保持レール部と、前記保持レール部で保持されている最後端のるつぼを押圧して一列のるつぼ全部を当該列方向に移動させ、保持レール部の先端に設けた送出口からるつぼを順次送出するスライドアクチュエータとをさらに具備し、前記保持レール部の送出口と前記水平移動路の挿入口とが接続されて、該保持レール部及び水平移動路が直列するように構成してあることを特徴とする。
【0011】
このようなものであれば、保持レール部のるつぼと加熱炉内のるつぼとが水平一直線上に直列するので、保持レール部上の最後端のるつぼを押すスライドアクチュエータを設けるだけの簡単な構造で、加熱炉にるつぼを送り込むとともにその導出口からるつぼを1つ1つ押し出すことができる。また、このように簡単な構造であるからこそ、故障が少なく、動作の確実性を担保できる。さらに、水平移動路や保持レール部の径に余裕を持たせることで、外径や高さ方向寸法に多少ばらつきのある安価なるつぼを用いても、問題なく動作させることもできる。
【0012】
前記列方向に延長することなく、その方向のコンパクト性を維持したまま、多くのるつぼを保持できるようにするためには、互いに平行な複数の前記保持レール部を支持するるつぼストッカーと、該るつぼストッカーを移動させて各保持レール部の送出口を前記挿入口との接続位置に位置づける移動機構とをさらに具備するものが好ましい。
【0013】
前記加熱炉の導出口から導出されたるつぼを受け止めるるつぼ受け止め部をさらに具備したものにおいて、空焼きしたるつぼを加熱炉からひとつひとつ確実に導出するとともに、るつぼ受け止め部に重複してるつぼが溜まらないようにするには、前記導出口からるつぼが導出された時点及びその導出されたるつぼが前記るつぼ受け止め部にあるか否かを検出するるつぼ検出機構をさらに具備するものが好適である。
【0014】
前記列方向のコンパクト性を向上させるには、前記スライドアクチュエータが、前記保持レール部の側方、下方又は上方に平行に設けた案内部と、該案内部に案内されてスライド移動する付勢体とを具備したものであり、前記付勢体に、保持レール部の側方、下方又は上方に設けた隙間から該保持レール部内に挿入されて前記最後端のるつぼを押すアームを設けた構成が好適である。このようなものであれば、スライドアクチュエータを保持レール部とほぼ同じ長さにして、しかも保持レール部に並列させて配置できるからである。
【0015】
るつぼとの接触抵抗を減らして円滑な移動を可能にするとともに、移動時に擦れることで発生する削粉等が蓄積されることを防止するには、保持レール部が、るつぼの外径よりも離間距離を短く設定した一対の平行な棒状部材からなり、るつぼが前記一対の棒状部材間にその一部を嵌入させて保持されるように構成してあるものが望ましい。
【発明の効果】
【0016】
本発明によれば、保持レール部と加熱炉内の水平移動路とを一直線となるように配置するとともに、保持レール部上の最後端のるつぼを押すスライドアクチュエータを設けるだけの簡単な構造で、加熱炉にるつぼを送り込んで導出口から押し出すという機能を実現できる。したがって、故障が少なく、動作の確実性を担保できるとともに、コストダウンにも寄与し得る。
【0017】
さらに、水平移動路や保持レール部の径に余裕を持たせることで、外径や高さ方向寸法に多少ばらつきのある安価なるつぼを用いても、問題なく動作させることができる。
【図面の簡単な説明】
【0018】
【図1】本発明の一実施形態に係るるつぼ空焼き装置の全体を示す概略側面図。
【図2】同実施形態におけるるつぼストッカーを示す斜視図。
【図3】同実施形態におけるるつぼストッカーを示す分解斜視図。
【図4】同実施形態における保持レール部及びるつぼを示す部分斜視図。
【図5】同実施形態におけるスライドアクチュエータを示す斜視図。
【図6】同実施形態における導出口やるつぼ受け止め部等を示す部分斜視図。
【図7】同実施形態のるつぼ空焼き装置の動作を示す概略側面図。
【図8】同実施形態のるつぼ空焼き装置の動作を示す概略側面図。
【図9】同実施形態のるつぼ空焼き装置の動作を示す概略側面図。
【図10】同実施形態のるつぼ空焼き装置の動作を示す概略側面図。
【発明を実施するための形態】
【0019】
以下、本発明の一実施形態について図面を参照して説明する。
【0020】
本実施形態に係るるつぼ空焼き装置100は、試料を燃焼させ、その燃焼ガスによって当該試料内に含まれる元素を分析する元素分析装置(図示しない)に用いられるるつぼUを空焼きするためのものであって、図1に示すように、るつぼUを加熱して空焼きする加熱炉10と、その加熱炉10にるつぼUを送り込むためのるつぼ送出機構20とを具備している。
このるつぼ送出機構20が、本るつぼ空焼き装置100の主たる特徴部分であるが、まずは加熱炉10について簡単に説明する。
【0021】
この加熱炉10は、図1に示すように、架台Kに配設されたものであり、例えば直方体状をなし、後面にるつぼUの挿入口1aが開口するとともに前面にるつぼUの導出口1bが開口するボディ1と、ボディ1内に配設されて前記挿入口1aに一端が接続されるとともに導出口1bに他端が接続された直線管状のるつぼ用水平移動路2と、前記水平移動路2の周囲に設けた図示しないヒータとを具備する。そして、前記挿入口1aからるつぼUが挿入されると、そのるつぼUによって水平移動路2に充填されている前のるつぼUが次々押されて移動し、前記導出口1bからるつぼUが順に押し出されるように構成してある。なお、ここでは、この水平移動路2を左右(ここでは、図1の紙面奥行き方向のことである。)に2つ設けている。
【0022】
一方、前記るつぼ送出機構20は、図1に示すように、前記架台Kに配設されたものであり、前記加熱炉10の後面に隣接して配置されるるつぼストッカー3と、このるつぼストッカー3を上下に駆動する移動機構4と、前記るつぼストッカー3の下方に配置されるスライドアクチュエータ5と、加熱炉10から導出されたるつぼUを検出するるつぼ検出機構7と、前記スライドアクチュエータ5や移動機構4等を制御する制御機構(図示しない)とを具備する。
各部を詳述する。
【0023】
るつぼストッカー3は、図1から図3に示すように、水平に延伸する複数の互いに平行な保持レール部31と、これら保持レール部31の両端に配設されて該保持レール部31を支持する一対の保持板32とを具備したものであり、前記保持レール部31に、複数のるつぼUが、水平に寝た状態で、かつ、隣り合うものの底部と開口部とが接するように一列に並べて保持される。なお、この実施形態では、この保持レール部31を、上下に5列、また、水平移動路2が左右に2つあることに対応して左右に2列の合計10列設けている。
【0024】
保持レール部31は、特に図4に詳細に示すように、互いの離間距離がるつぼUの外径よりも短く設定された一対の平行な円柱状又は円筒状をなす直線棒状部材311からなるものであり、るつぼUは、これら一対の棒状部材311間にその一部を嵌入させて保持される。
【0025】
保持板32は、保持レール部31の延伸方向(るつぼUの列方向)と垂直に起立する板状をなすものであり、前側のものには、るつぼUが通過する大きさの送出口32aが設けてあり、後側のものには、後述するスライドアクチュエータ5のアーム53が通過するための側方に開口する切り込み孔32bが設けてある。
【0026】
移動機構4は、図1に示すように、例えばるつぼストッカー3を支持するZステージを利用したものである。そして、このるつぼストッカー3を保持レール部31の上下ピッチに合わせて段階的に上下動させることで、上下いずれかの段の保持レール部31の送出口32aが、前記挿入口1aとの接続位置に選択的に位置づけられるようにしてある。
【0027】
スライドアクチュエータ5は、図1、図5等に示すように、前記保持レール部31で保持されている一列のるつぼUを、後ろから押して当該列方向に移動させ、前記送出口32aからるつぼUを順次送出するものである。より具体的にこのものは、案内部たる溝51aを有したケーシング51と、この溝51aに嵌合して保持レール部31の延伸方向(すなわち、るつぼUの列方向)にスライド移動する付勢体52と、この付勢体52を進退駆動する図示しない駆動機構とを具備している。なお、このスライドアクチュエータ5は、水平移動路2が左右に2つあることに対応して左右に2つが設けられている。
【0028】
ケーシング51は、長尺直方体状をなすものであり、るつぼストッカー3の下方に、その延伸方向を、保持レール部31の延伸方向と合致させて配置してある。そしてその側面に前記溝51aが形成してある。
【0029】
付勢体52は、前記溝51aに嵌合する板状をなすもので、この付勢体52からるつぼストッカー3に向かって上方に延出するアーム53を設けている。アーム53は、付勢体52に接続された鉛直に起立する基端部531と、前記基端部531の先端から保持レール部31に向かって水平に延出する先端部532とからなる概略逆L字型をなすものである。そして前記先端部532が、側方から保持レール部31内に差し込んであり、当該保持レール部31に保持されている最後尾のるつぼUをその後ろから前方に向かって押すことができるように構成してある。
【0030】
前記駆動機構は、図示しないが、ケーシング51内に配設したモータ及びこのモータの回転軸に連結されたネジ部材とからなるものであり、このネジ部材に前記付勢体52に設けた雌ねじ孔が螺合するように構成してある。そして前記モータが正逆回転することによって、付勢体52が進退移動するように構成してある。
【0031】
さらにこの実施形態では、図1、図6等に示すように、前記加熱炉10の導出口1bから導出されたるつぼUを受け止めるるつぼ受け止め部6と、前記導出口1bから導出されたるつぼUを前記るつぼ受け止め部6に導く接続路9とをさらに設けている。
【0032】
まず接続路9から説明すると、このものは、前記導出口1bから水平前方に延出する基端部分91と、その基端部分91に連続して前方斜め下方に垂れ下がる先端部分92とから構成されるもので、この実施形態では、保持レール部31同様、一対の平行な管(円筒棒)又は円柱棒によって形成している。しかして、前記基端部分91の長さは、るつぼUの高さ(軸方向の長さ)の半分未満に設定してあり、導出口1bから押し出されたるつぼUは、自重で先端部分92を滑り落ちていくように構成してある。
【0033】
るつぼ受け止め部6は、前記接続路9の先端に臨むように配置される板体61と、この板体61を左右水平軸周りに回転可能に支持するブラケット62と、前記板体61を、接続路9の先端に接するように弾性付勢する弾性体(図示しない)とを具備したものである。板体61は、その表面にるつぼUの底部が嵌り込む部分円形凹部61aを形成した矩形状をなす簿板である。ブラケット62は、加熱炉ボディ1の前面に取り付けられたもので、このブラケット62に、列方向と垂直でかつ水平な方向に延びる回転軸62aが設けられている。板体61は、その基端部を前記回転軸62aによって回転可能に支持されている。弾性体は、図示しないが、例えば、回転軸62aやブラケット62に取り付けられたバネであり、その弾性力によって、板体61を、その先端部が上方に回転するように付勢する。そして、外力が加わらない状態では、板体61は接続路9の先端に押圧接触し、その表面が接続路先端部分92の延伸方向と略垂直になる姿勢で保持される。なお、板体61の回転範囲は、接続路9の先端に押圧接触している斜めの姿勢から、その先端部分92が下がって水平姿勢となる範囲に規制されている。
【0034】
るつぼ検出機構7は、各導出口1bの近傍(ここでは上方)に取り付けられた例えば超音波センサ等の物体感知センサ71を具備したものである。この物体感知センサ71は、その感知範囲が、前記接続路9の先端部分92及びるつぼ受け止め部6に及んでおり、るつぼUが、接続路9を通過したりるつぼ受け止め部6にあったりすると、そのるつぼUの存在を感知してその旨の信号を出力する。
【0035】
制御機構は、図示しないが、例えばCPUやメモリ等を有した電気回路で構成されたものであり、前記物体感知センサ71等からの信号を受信して移動機構4やスライドアクチュエータ5の動作を制御する。
次に、かかる構成のるつぼ空焼き装置100の動作について説明する。
【0036】
まず、オペレータが、るつぼストッカー3の各保持レール部31にるつぼUを充填する。なお、このるつぼストッカー3は、移動機構4から取り外し可能に構成してあるので、オペレータは、るつぼストッカー3を取り外した状態で、その前面の送出口32aにるつぼUを開口側から挿入すればよい。このようにしてるつぼストッカー3の各保持レール部31にるつぼUを充填した後、るつぼストッカー3を移動機構4に取り付ける。
この状態で、例えばオペレータが図示しないスタートボタンを押すと、加熱炉10が点火されるとともに前記制御機構による自動運転が始まる。
【0037】
まず最初に、制御機構の指令によって移動機構4が作動し、例えば最上列の保持レール部31の送出口32aが加熱炉10の挿入口1aと略連続するように、るつぼストッカー3を移動させる。
【0038】
次に、一方のスライドアクチュエータ5が作動し、そのアーム53を最上列の保持レール部31の後方から切り込み孔32bを介して挿入し、当該保持レール部31の最後端に位置するるつぼUの後ろに位置づける。この状態を図7に示す。
【0039】
そして、物体感知センサ71によって、この保持レール部31に対応する一方のるつぼ受け止め部6にるつぼUがあるかないかが検出される。その結果、るつぼUがなければ、制御機構の指令によって、アーム53が前方にスライド移動し、その列のるつぼUを前方に移動させる。
【0040】
このとき、加熱炉10の水平移動路2内には、前回の残りのるつぼUが充填されているので、そのるつぼUも押されて前方に移動し、最前端のるつぼUが加熱炉10の導出口1bから押し出される。押し出されたるつぼUは、前記接続路9を通り、るつぼ受け止め部6で受け止められる。
【0041】
しかして、前記るつぼUが接続路9を通過したときに物体感知センサ71がその旨を出力するので、それを制御機構が受信して、その時点でアーム53を停止させる。このようにして、結果的にアーム53がるつぼU1つ分だけ前方に移動して、1つのるつぼUがるつぼ受け止め部6に受け止められる。この状態を図8に示す。なお、初期状態で水平移動路2内にるつぼUがなく、あるいは完全に充填されていない場合は、るつぼUが1つだけ押し出されるまでアーム53は前方に移動し続ける。
次に、るつぼUを押し出す所定の時間間隔が経過するのを待って、制御機構は、他方のスライドアクチュエータ5を作動させ、前記同様の動作を行う。
【0042】
ところで、るつぼ受け止め部6にあるるつぼUは、図示しないロボットやオペレータにより取り去られる。ロボットの場合は、そのハンドが前記板体61を弾性付勢力に逆らって水平にし、るつぼUを鉛直に起立させた状態で、当該るつぼUを掴むように設定してある。
【0043】
るつぼUが取り去られると、物体感知センサ71がその旨を検知するので、前述の手順同様、制御機構が、今度は一方のアーム53を前方に移動させて、次のるつぼUを1つ押し出す。なお、このときも、るつぼUを押し出すタイミングが、前のるつぼUを押し出した時間から、前述した所定の時間間隔以上空くように、制御機構は制御する。これは加熱炉10内に各るつぼUを一定時間以上滞在させて、十分に空焼きするためである。
【0044】
このようにして、左右のアーム53が交互に動作し、最上段2列の保持レール部31のるつぼUを全て加熱炉10内に送出すると、図示しないリミットセンサなどによってそのことを制御機構が検知する。このときの状態を図9に示す。その後、制御機構は、各アーム53を後方に移動させて、保持レール部31から離脱させる。
【0045】
次に制御機構は、移動機構4を動作させてるつぼストッカー3を上昇させ、次段の保持レール部31の送出口32aを加熱炉10の挿入口1aに位置づける。このときの状態を図10に示す。そしてその保持レール部31のるつぼUがなくなるまで、前述の動作を繰り返す。
以上が、このるつぼ空焼き装置100の動作の概略である。
【0046】
しかしてこのように構成した本実施形態によれば、保持レール部31のるつぼUと加熱炉10内のるつぼUとが水平一直線上に直列するように構成し、かつ、保持レール部31上の最後端のるつぼUを押すスライドアクチュエータ5を設けるだけの簡単な構造で、加熱炉10にるつぼUを送り込むとともにその導出口1bからるつぼUを押し出すことができる。また、加熱炉10の導出口1bからるつぼUが導出された時点及びその導出されたるつぼUが前記るつぼ受け止め部6にあるか否かを検出するるつぼ検出機構7を設け、このるつぼ検出機構7からの出力信号に基づいてスライドアクチュエータ5を動作させているので、るつぼUの高さ方向の寸法がバラバラでも、空焼きしたるつぼUを加熱炉10からひとつひとつ確実に導出することができるうえ、るつぼ受け止め部6に重複してるつぼUが溜まらないようにすることができる。
【0047】
さらに、仮に、るつぼUを移動させるためにシリンダを利用した場合、シリンダの仕様として、るつぼUの移動長分のピストン及びそのピストンを収容する長さのボアが必要となるため、装置全体として列方向に長くならざるを得ない。しかし、この実施形態によれば、前述したように、ネジ部材に螺合してそのネジ部材の回転によって進退移動する付勢体52を有したスライドアクチュエータ5を利用しているので、スライドアクチュエータ5を保持レール部31とほぼ同じ長さにでき、しかもこのスライドアクチュエータ5を保持レール部31に並列させて配置できる。したがって、前記列方向のコンパクト性を向上させることができる。
【0048】
また、保持レール部31及び接続路9が、るつぼUの外径よりも離間距離を短く設定した一対の平行な棒状部材311からなるので、るつぼUとの接触抵抗が減少して円滑な移動が可能になるとともに、移動時に擦れることで発生する削粉等を下に落としてこれが蓄積されることを防止することができる。
【0049】
加えて、この実施形態では2列の水平移動路2を設け、そこから交互にるつぼUが押し出されるようにしているので、同じ時間間隔でるつぼUを押し出す1列のものに比べ、加熱炉10内でのるつぼUの滞在時間を長くできる。逆に言えば、同じ滞在時間を確保する場合、1列のものに比べて加熱炉10の列方向の長さを短くできる。さらに、1列が故障等の理由により動作しない場合、残りの1列のみで送り出しが可能である。
【0050】
なお、本発明は前記実施形態に限られるものではない。
例えば、前記実施形態では、2列の水平移動路とそれに対応するように水平には2列の保持レール及び2つのスライドアクチュエータ5を設けていたが、これを1列にしてもよいし3列以上にしてもよい。また、2列のるつぼUを交互に押し出すようにしていたが、これを同時に押し出すようにしてもよい。
保持レール部の形状は、レール機能(案内機能)を果たしさえすればよく、例えば管状のもの等も保持レール部として用いることができる。
その他、本発明は、その趣旨を逸脱しない範囲で種々の変形が可能である。
【符号の説明】
【0051】
100…るつぼ空焼き装置
10…加熱炉
U…るつぼ
1a…挿入口
1b…導出口
2…水平移動路
3…るつぼストッカー
31…保持レール部
32a…送出口
5…スライドアクチュエータ
4…移動機構
6…るつぼ受け止め部
5…るつぼ検出機構
51a…案内部(溝)
52…付勢体
53…アーム
311…棒状部材
【特許請求の範囲】
【請求項1】
一端がるつぼの挿入口、他端がるつぼの導出口に接続された水平移動路を内部に有し、前記挿入口から挿入されたるつぼが、次に挿入された後ろのるつぼに押されることによって前記導出口に向かって移動するように構成されたるつぼ空焼き用の加熱炉を具備したものであって、
水平に寝かせた複数のるつぼを、隣り合うものの底部と開口部とが接するように一列に並べて保持する保持レール部と、
前記保持レール部で保持されている最後端のるつぼを前方に動かして当該一列のるつぼ全部を当該列方向に移動させ、保持レール部の先端に設けた送出口からるつぼを順次送出するスライドアクチュエータとをさらに具備し、
前記保持レール部の送出口と前記水平移動路の挿入口とが接続されて、該保持レール部及び水平移動路が直列するように構成してあることを特徴とするるつぼ空焼き装置。
【請求項2】
互いに平行な複数の前記保持レール部を支持するるつぼストッカーと、該るつぼストッカーを移動させて各保持レール部の送出口を前記挿入口との接続位置に位置づける移動機構とをさらに具備するものである請求項1記載のるつぼ空焼き装置。
【請求項3】
前記加熱炉の導出口から導出されたるつぼを受け止めるるつぼ受け止め部と、前記導出口からるつぼが導出された時点及びその導出されたるつぼが前記るつぼ受け止め部にあるか否かを検出するるつぼ検出機構とをさらに具備するものである請求項1又は2記載のるつぼ空焼き装置。
【請求項4】
前記スライドアクチュエータが、前記保持レール部と平行に、その側方、下方又は上方に設けた案内部と、該案内部に案内されてスライド移動する付勢体とを具備したものであり、
前記付勢体に、保持レール部の側方、下方又は上方に設けた隙間から該保持レール部内に挿入されて前記最後端のるつぼを押すアームを設けている請求項1乃至3いずれかに記載のるつぼ空焼き装置。
【請求項5】
前記保持レール部が、るつぼの外径よりも離間距離を短く設定した一対の平行な棒状部材からなり、るつぼが前記一対の棒状部材間に一部を嵌入させて保持されるように構成してある請求項1乃至4いずれかに記載のるつぼ空焼き装置。
【請求項1】
一端がるつぼの挿入口、他端がるつぼの導出口に接続された水平移動路を内部に有し、前記挿入口から挿入されたるつぼが、次に挿入された後ろのるつぼに押されることによって前記導出口に向かって移動するように構成されたるつぼ空焼き用の加熱炉を具備したものであって、
水平に寝かせた複数のるつぼを、隣り合うものの底部と開口部とが接するように一列に並べて保持する保持レール部と、
前記保持レール部で保持されている最後端のるつぼを前方に動かして当該一列のるつぼ全部を当該列方向に移動させ、保持レール部の先端に設けた送出口からるつぼを順次送出するスライドアクチュエータとをさらに具備し、
前記保持レール部の送出口と前記水平移動路の挿入口とが接続されて、該保持レール部及び水平移動路が直列するように構成してあることを特徴とするるつぼ空焼き装置。
【請求項2】
互いに平行な複数の前記保持レール部を支持するるつぼストッカーと、該るつぼストッカーを移動させて各保持レール部の送出口を前記挿入口との接続位置に位置づける移動機構とをさらに具備するものである請求項1記載のるつぼ空焼き装置。
【請求項3】
前記加熱炉の導出口から導出されたるつぼを受け止めるるつぼ受け止め部と、前記導出口からるつぼが導出された時点及びその導出されたるつぼが前記るつぼ受け止め部にあるか否かを検出するるつぼ検出機構とをさらに具備するものである請求項1又は2記載のるつぼ空焼き装置。
【請求項4】
前記スライドアクチュエータが、前記保持レール部と平行に、その側方、下方又は上方に設けた案内部と、該案内部に案内されてスライド移動する付勢体とを具備したものであり、
前記付勢体に、保持レール部の側方、下方又は上方に設けた隙間から該保持レール部内に挿入されて前記最後端のるつぼを押すアームを設けている請求項1乃至3いずれかに記載のるつぼ空焼き装置。
【請求項5】
前記保持レール部が、るつぼの外径よりも離間距離を短く設定した一対の平行な棒状部材からなり、るつぼが前記一対の棒状部材間に一部を嵌入させて保持されるように構成してある請求項1乃至4いずれかに記載のるつぼ空焼き装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−99708(P2011−99708A)
【公開日】平成23年5月19日(2011.5.19)
【国際特許分類】
【出願番号】特願2009−253265(P2009−253265)
【出願日】平成21年11月4日(2009.11.4)
【出願人】(000155023)株式会社堀場製作所 (638)
【Fターム(参考)】
【公開日】平成23年5月19日(2011.5.19)
【国際特許分類】
【出願日】平成21年11月4日(2009.11.4)
【出願人】(000155023)株式会社堀場製作所 (638)
【Fターム(参考)】
[ Back to top ]